


- Home /
- Publicaciones de patentes /
- SISTEMA RÍGIDO DE LANZAMIENTO Y RECUPERACIÓN DE UN VEHÍCULO AUTÓNOMO SUBMARINO DESDE UN VEHÍCULO AUTÓNOMO MARINO DE SUPERFICIE
Patente nacional por "SISTEMA RÍGIDO DE LANZAMIENTO Y RECUPERACIÓN DE UN VEHÍCULO AUTÓNOMO SUBMARINO DESDE UN VEHÍCULO AUTÓNOMO MARINO DE SUPERFICIE"
Este registro ha sido solicitado por
Persona física
Contacto
- Estado: A punto de caducar
- País:
- España
- Fecha solicitud:
- 21/04/2022
- Número solicitud:
-
P202230360
- Número publicación:
-
ES2955225
- Fecha de concesión:
-
27/03/2024
- Inventores:
-
Persona física
- Datos del titular:
-
Persona física
- Datos del representante:
-
- Clasificación Internacional de Patentes:
- B63B 35/40
- Clasificación Internacional de Patentes de la publicación:
- B63B 35/40
- Fecha de vencimiento:
Quiero registrar una patente

Reivindicaciones:
+ ES-2955225_B21. Sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) con casco de catamarán, caracterizado por que está dotado de un sistema de anclaje (11) para su unión a la parte inferior del USV y de una serie de pinzas de costilla para la sujeción del AUV, que lo sitúan en todo momento por debajo de la línea de flotación del USV y lo convierten en un casco adicional, dotando al conjunto de una configuración a modo de trimarán con casco triple híbrido (SWASSH) y eliminando la necesidad de emplear sistemas de cabestrantes para arriado e izado del AUV al USV para su transporte, y por que el movimiento para la sujeción y liberación del AUV se consigue mediante grupo electrohidráulico equipado con una bomba de pistones de caudal variable autorregulada instalada a bordo del USV, mediante la cual se acciona: a) un pistón (10) situado en la parte superior del sistema que permite elevar el sistema desde el USV una vez que el AUV se ha desplegado, o bajarlo cuando el AUV deba ser recuperado. b) dos pistones (3) situados en los laterales del sistema que mediante la acción de cierre/apertura permiten el movimiento de las pinzas de costillas (2.a y 2.b) que sirven de sujeción al AUV. 2. Sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , según reivindicación 1, que comprende: - Un grupo electrohidráulico equipado con una bomba de pistones de caudal variable autorregulada que se instala a bordo del USV. - Un bloque central (1) , que da soporte al sistema, el cual en su parte superior cuenta con un agujero circular que permite el paso del sistema de anclaje con el USV (11) , en su parte media sirve de soporte de los pistones (3) que van unidos a las barras pasantes (6) que dan soporte y dotan de movimiento a las pinzas (2) , y en las caras anterior y posterior de su parte inferior alberga cuatro agujeros pasantes, dos destinados a ubicar las barras (9) que lo atraviesan y le dan consistencia y dos destinados a ubicar los ejes de giro (5) de las pinzas (2.a y 2.b) , mientras que en las caras laterales de su parte inferior presenta huecos para que la parte superior de las dos pinzas (2.a) se puedan introducir en su interior al girar solidarias a los ejes (5) que discurren por su interior. - Cuatro pinzas, dos de ellas engranadas por su parte superior (2.a) y otras dos no engranadas (2.b) , todas ellas con forma geométrica de lúnula con objeto de que al cerrarse generen un espacio hueco circular que permita sujetar un AUV y finalizadas por su parte inferior en forma de uña abierta 25° con respecto al interior de la pinza, cada una de las cuales están dotadas de 6 agujeros pasantes (tres en cada garra) : - El agujero superior de cada garra permite el paso de un eje de rotación de las pinzas (5) que atraviesa el bloque (1) . - El agujero intermedio permite el paso de una barra (6) solidaria con los pistones (3) que abren y cierran las pinzas. - El agujero inferior permite el paso de una barra (7) que le confiere consistencia al conjunto de pinzas. - Dos pistones laterales (3) , uno a cada lado del bloque central (1) , que unidos por uno de sus extremos a este mediante lengüetas soldadas (4) , por su extremo distal presentan un agujero pasante, a través del cual discurrirán las barras pasantes (6) . - Lengüetas de unión (4) de los pistones laterales (3) al cuerpo central (1) . - Dos barras solidarias con los pistones laterales (6) , que transcurren por el interior del agujero de la parte distal del pistón cuya función es, además de dar soporte a las pinzas (2.a y 2.b) , dotarlas del movimiento necesario para sujetar o liberar la sujeción del AUV. - Dos barras para dar consistencia al conjunto de pinzas (7) . - Dos ejes de giro de las pinzas (5) , que atraviesan el bloque central (1) desde su parte frontal a la trasera, uno a cada lado y que acaban en cada extremo atravesando el tope (8) sobre el que giran libres. - Dos topes (8) situados en los extremos delantero y trasero del bloque central (1) , que permiten el movimiento de los ejes de giro de las pinzas, y que se encuentran unidos entre sí por dos barras soldadas (9) que atraviesan el bloque y que le dan consistencia. - Dos barras soldadas (9) , que atraviesan el bloque (1) y le dan consistencia. - Pistón superior (10) , que se encuentra situado en la parte superior del bloque (1) y va unido solidariamente a la tapa superior del sistema de anclaje con el USV (11) . - Sistema de anclaje con el USV (11) , compuesto por un cilindro y una tapa superior de forma circular, a la que va unido de manera solidaria el pistón superior (19) . - Una barra de sujeción (12) que va unida a la parte inferior del pistón superior (19) y soldada a las caras internas de los laterales del bloque (1) . 3. Sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , según reivindicación 2, caracterizado porque las garras se encuentran soldadas a los ejes de giro (5) , que las traspasan a través de sus agujeros pasantes superiores. 4. Sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , según reivindicación 2, caracterizado por que las garras se encuentran soldadas a las barras pasantes (6) , que las traspasan a través de sus agujeros pasantes intermedios. 5. Sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , según reivindicación 2, caracterizado por que las garras se encuentran soldadas a las barras pasantes (7) , que las traspasan a través de sus agujeros pasantes inferiores. 6. Sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , según reivindicación 2, caracterizado por que el cierre de las pinzas (2.a y 2.b) se produce mediante la elongación de los pistones laterales (3) . 7. Sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , según reivindicación 2, caracterizado por que la apertura de las pinzas (2.a y 2.b) se produce mediante la contracción de los pistones laterales (3) . 8. Sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , según reivindicación 2, caracterizado por que la subida del sistema desde el USV una vez se ha desplegado el AUV se produce mediante la contracción del pistón superior (10) . 9. Sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , según reivindicación 2, caracterizado por que la bajada del sistema desde el USV para ecuperar y dar soporte al AUV se produce mediante la elongación del pistón superior (10) . 10. Sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , según reivindicaciones anteriores, caracterizado por que cuando el sistema se encuentra sujetando el AUV entre sus pinzas, los pistones laterales solidarios con las pinzas (3) permanecen en su máxima extensión manteniendo las pinzas cerradas y el pistón superior (10) permanece en su máxima extensión, lo que asegura que el AUV esté completamente sumergido. 11. Sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , según reivindicaciones anteriores, caracterizado por que cuando el sistema se encuentra durante la maniobra de lanzado los pistones laterales solidarios con las pinzas (3) se cierran, dando lugar a la apertura de las pinzas y a la liberación del AUV y el pistón superior (10) permanece en su máxima extensión, lo que asegura que la maniobra no ponga en riesgo al AUV, que está completamente sumergido. 12. Sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , según reivindicaciones anteriores, caracterizado por que para subir el sistema hacia el USV, el pistón superior (10) se cierra, levantando la invención hasta una altura que permite que el AUV inicie sus propias maniobras sin riesgo y los pistones laterales solidarios con las pinzas (3) permanecen en su posición de menor extensión, lo que evita que las pinzas se cierren. 13. Sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , según reivindicaciones anteriores, caracterizado por que durante la maniobra de recuperación del AUV, con el USV sobre el AUV, el pistón superior (10) se abre al máximo, introduciendo el sistema en el agua, a una distancia que permite recoger el USV y los pistones solidarios con las pinzas (3) se abren hasta su máxima extensión, cerrando las pinzas sobre el cuerpo del AUV. 14. Procedimiento de uso del sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) con casco de catamarán, según reivindicaciones anteriores, que comprende las siguientes etapas: a. fijar temporalmente un AUV (b) a la estructura de un USV (a) , permitiendo que todo el cuerpo del AUV (b) permanezca sumergido en todo momento, b. portar el AUV (b) dentro de la masa de agua mientras el USV (a) se desplaza sobre la misma con sus propios medios de propulsión, a rumbo GPS programado y apoyado por las redes de satélites (c) o de forma controlada desde una estación de control situada en tierra o a bordo de un barco de apoyo (d) , c. permitir que, mientras el AUV (b) se encuentra fijo al USV (a) , el USV (a) pueda tomar datos del medio marino con sus propios sensores, sin entorpecer con el cuerpo del AUV (b) la recepción de datos o las maniobras necesarias a para la toma de los mismos, y hasta una profundidad (h1) determinada por las capacidades de estos sensores, d. permitir que, mientras el AUV (b) se encuentra fijo al USV (a) , el AUV (b) pueda tomar datos del medio marino con sus propios sensores, sin que la presencia del USV (b) que lo porta entorpezca la recepción de datos, y hasta una profundidad (h2) determinada por las capacidades de estos sensores, e. lanzar en un punto predeterminado el AUV (b) que se encuentra fijado al USV (a) sin poner en riesgo la integridad de ninguno de los vehículos, ni las maniobras de navegación del AUV (b) una vez liberado, para que pueda bajar hasta la profundidad que determine su capacidad (h3) y trabaje de forma autónoma, f. recoger el AUV (b) cuando este haya finalizado su misión y se encuentre en superficie, para volver a fijarlo al USV (a) sin poner en riesgo la integridad de ninguno de los vehículos, ni las maniobras de navegación del USV (a) una vez que se haya fijado en AUV (b) .
+ ES-2955225_A11. Sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) con casco de catamarán, caracterizado por que está dotado de un sistema de anclaje (11) para su unión a la parte inferior del USV y de una serie de pinzas de costilla para la sujeción del AUV, que lo sitúan en todo momento por debajo de la línea de flotación del USV y lo convierten en un casco adicional, dotando al conjunto de una configuración a modo de trimarán con casco triple híbrido (SWASSH) y eliminando la necesidad de emplear sistemas de cabestrantes para arriado e izado del AUV al USV para su transporte, y por que el movimiento para la sujeción y liberación del AUV se consigue mediante grupo electrohidráulico equipado con una bomba de pistones de caudal variable autorregulada instalada a bordo del USV, mediante la cual se acciona: a) un pistón (10) situado en la parte superior del sistema que permite elevar el sistema desde el USV una vez que el AUV se ha desplegado, o bajarlo cuando el AUV deba ser recuperado. b) dos pistones (3) situados en los laterales del sistema que mediante la acción de cierre/apertura permiten el movimiento de las pinzas de costillas (2.a y 2.b) que sirven de sujeción al AUV. 2. Sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , según reivindicación 1, que comprende: - Un grupo electrohidráulico equipado con una bomba de pistones de caudal variable autorregulada que se instala a bordo del USV. - Un bloque central (1) , que da soporte al sistema, el cual en su parte superior cuenta con un agujero circular que permite el paso del sistema de anclaje con el USV (11) , en su parte media sirve de soporte de los pistones (3) que van unidos a las barras pasantes (6) que dan soporte y dotan de movimiento a las pinzas (2) , y en las caras anterior y posterior de su parte inferior alberga cuatro agujeros pasantes, dos destinados a ubicar las barras (9) que lo atraviesan y le dan consistencia y dos destinados a ubicar los ejes de giro (5) de las pinzas (2.a y 2.b) , mientras que en las caras laterales de su parte inferior presenta huecos para que la parte superior de las dos pinzas (2.a) se puedan introducir en su interior al girar solidarias a los ejes (5) que discurren por su interior. - Cuatro pinzas, dos de ellas engranadas por su parte superior (2.a) y otras dos no engranadas (2.b) , todas ellas con forma geométrica de lúnula con objeto de que al cerrarse generen un espacio hueco circular que permita sujetar un AUV y finalizadas por su parte inferior en forma de uña abierta 25° con respecto al interior de la pinza, cada una de las cuales están dotadas de 6 agujeros pasantes (tres en cada garra) : - El agujero superior de cada garra permite el paso de un eje de rotación de las pinzas (5) que atraviesa el bloque (1) . - El agujero intermedio permite el paso de una barra (6) solidaria con los pistones (3) que abren y cierran las pinzas. - El agujero inferior permite el paso de una barra (7) que le confiere consistencia al conjunto de pinzas. - Dos pistones laterales (3) , uno a cada lado del bloque central (1) , que unidos por uno de sus extremos a este mediante lengüetas soldadas (4) , por su extremo distal presentan un agujero pasante, a través del cual discurrirán las barras pasantes (6) . - Lengüetas de unión (4) de los pistones laterales (3) al cuerpo central (1) . - Dos barras solidarias con los pistones laterales (6) , que transcurren por el interior del agujero de la parte distal del pistón cuya función es, además de dar soporte a las pinzas (2.a y 2.b) , dotarlas del movimiento necesario para sujetar o liberar la sujeción del AUV. - Dos barras para dar consistencia al conjunto de pinzas (7) . - Dos ejes de giro de las pinzas (5) , que atraviesan el bloque central (1) desde su parte frontal a la trasera, uno a cada lado y que acaban en cada extremo atravesando el tope (8) sobre el que giran libres. - Dos topes (8) situados en los extremos delantero y trasero del bloque central (1) , que permiten el movimiento de los ejes de giro de las pinzas, y que se encuentran unidos entre sí por dos barras soldadas (9) que atraviesan el bloque y que le dan consistencia. - Dos barras soldadas (9) , que atraviesan el bloque (1) y le dan consistencia. - Pistón superior (10) , que se encuentra situado en la parte superior del bloque (1) y va unido solidariamente a la tapa superior del sistema de anclaje con el USV (11) . - Sistema de anclaje con el USV (11) , compuesto por un cilindro y una tapa superior de forma circular, a la que va unido de manera solidaria el pistón superior (19) . - Una barra de sujeción (12) que va unida a la parte inferior del pistón superior (19) y soldada a las caras internas de los laterales del bloque (1) . 3. Sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , según reivindicación 2, caracterizado porque las garras se encuentran soldadas a los ejes de giro (5) , que las traspasan a través de sus agujeros pasantes superiores. 4. Sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , según reivindicación 2, caracterizado por que las garras se encuentran soldadas a las barras pasantes (6) , que las traspasan a través de sus agujeros pasantes intermedios. 5. Sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , según reivindicación 2, caracterizado por que las garras se encuentran soldadas a las barras pasantes (7) , que las traspasan a través de sus agujeros pasantes inferiores. 6. Sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , según reivindicación 2, caracterizado por que el cierre de las pinzas (2.a y 2.b) se produce mediante la elongación de los pistones laterales (3) . 7. Sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , según reivindicación 2, caracterizado por que la apertura de las pinzas (2.a y 2.b) se produce mediante la contracción de los pistones laterales (3) . 8. Sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , según reivindicación 2, caracterizado por que la subida del sistema desde el USV una vez se ha desplegado el AUV se produce mediante la contracción del pistón superior (10) . 9. Sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , según reivindicación 2, caracterizado por que la bajada del sistema desde el USV para ecuperar y dar soporte al AUV se produce mediante la elongación del pistón superior (10) . 10. Sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , según reivindicaciones anteriores, caracterizado por que cuando el sistema se encuentra sujetando el AUV entre sus pinzas, los pistones laterales solidarios con las pinzas (3) permanecen en su máxima extensión manteniendo las pinzas cerradas y el pistón superior (10) permanece en su máxima extensión, lo que asegura que el AUV esté completamente sumergido. 11. Sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , según reivindicaciones anteriores, caracterizado por que cuando el sistema se encuentra durante la maniobra de lanzado los pistones laterales solidarios con las pinzas (3) se cierran, dando lugar a la apertura de las pinzas y a la liberación del AUV y el pistón superior (10) permanece en su máxima extensión, lo que asegura que la maniobra no ponga en riesgo al AUV, que está completamente sumergido. 12. Sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , según reivindicaciones anteriores, caracterizado por que para subir el sistema hacia el USV, el pistón superior (10) se cierra, levantando la invención hasta una altura que permite que el AUV inicie sus propias maniobras sin riesgo y los pistones laterales solidarios con las pinzas (3) permanecen en su posición de menor extensión, lo que evita que las pinzas se cierren. 13. Sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , según reivindicaciones anteriores, caracterizado por que durante la maniobra de recuperación del AUV, con el USV sobre el AUV, el pistón superior (10) se abre al máximo, introduciendo el sistema en el agua, a una distancia que permite recoger el USV y los pistones solidarios con las pinzas (3) se abren hasta su máxima extensión, cerrando las pinzas sobre el cuerpo del AUV. 14. Procedimiento de uso del sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) con casco de catamarán, según reivindicaciones anteriores, que comprende las siguientes etapas: a. fijar temporalmente un AUV (b) a la estructura de un USV (a) , permitiendo que todo el cuerpo del AUV (b) permanezca sumergido en todo momento, b. portar el AUV (b) dentro de la masa de agua mientras el USV (a) se desplaza sobre la misma con sus propios medios de propulsión, a rumbo GPS programado y apoyado por las redes de satélites (c) o de forma controlada desde una estación de control situada en tierra o a bordo de un barco de apoyo (d) , c. permitir que, mientras el AUV (b) se encuentra fijo al USV (a) , el USV (a) pueda tomar datos del medio marino con sus propios sensores, sin entorpecer con el cuerpo del AUV (b) la recepción de datos o las maniobras necesarias a para la toma de los mismos, y hasta una profundidad (h1) determinada por las capacidades de estos sensores, d. permitir que, mientras el AUV (b) se encuentra fijo al USV (a) , el AUV (b) pueda tomar datos del medio marino con sus propios sensores, sin que la presencia del USV (b) que lo porta entorpezca la recepción de datos, y hasta una profundidad (h2) determinada por las capacidades de estos sensores, e. lanzar en un punto predeterminado el AUV (b) que se encuentra fijado al USV (a) sin poner en riesgo la integridad de ninguno de los vehículos, ni las maniobras de navegación del AUV (b) una vez liberado, para que pueda bajar hasta la profundidad que determine su capacidad (h3) y trabaje de forma autónoma, f. recoger el AUV (b) cuando este haya finalizado su misión y se encuentre en superficie, para volver a fijarlo al USV (a) sin poner en riesgo la integridad de ninguno de los vehículos, ni las maniobras de navegación del USV (a) una vez que se haya fijado en AUV (b) .
Los productos y servicios protegidos por este registro son:
B63B 35/40
Descripciones:
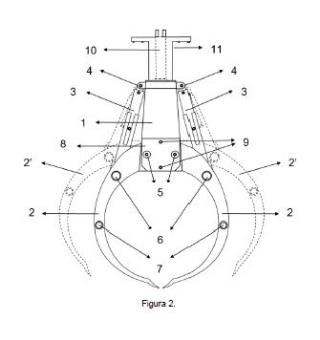
+ ES-2955225_B2 SISTEMA RÍGIDO DE LANZAMIENTO Y RECUPERACIÓN DE UN VEHÍCULO AUTÓNOMO SUBMARINO DESDE UN VEHÍCULO AUTÓNOMO MARINO DE SUPERFICIE SECTOR DE LA TÉCNICA Tecnología marina aplicada a vehículos autónomos marinos. ANTECEDENTES DE LA INVENCIÓN La Universidad de Cádiz dispone de un conjunto de vehículos no tripulados, marinos y aéreos que, frente a los clásicos barcos oceanográficos, sumergibles o aeronaves, le permiten llevar a cabo diversas misiones científicas a un menor coste, más largas y comprometidas, con mayor seguridad para el personal que los opera, y con capacidad de un despliegue más rápido en zonas de difícil acceso o vetadas para otros vehículos tripulados. En este documento se hace referencia al uso de dos tipos de vehículos autónomos: - Por un lado, se hace referencia al uso de la invención propuesta en un vehículo autónomo marino de superficie (conocido por sus siglas en ingles USV, Unmanned Surface Vehicle o ASC, Autonomous Surface Craft) . Su configuración es similar a la de un barco tradicional, pero puede ser operados de forma totalmente autónoma, mediante la programación previa de una ruta, o de forma semiautónoma, con el control ejercido desde una estación de control en tierra o a bordo de otra embarcación. Dado que opera sobre la superficie de mares o lagos, su localización es precisa, la comunicación vehículo-operador es inmediata y la transmisión de datos a tiempo real es inmediata. - Por otro lado, también se hace referencia al uso de la invención propuesta en un vehículo autónomo submarino (AUV, del inglés de Autonomous Underwater Vehicle) , que posee una arquitectura de control que le permite realizar misiones bajo el agua sin la supervisión de un operador, con las misiones y navegación previamente programadas. A diferencia del USV, su control en tiempo real por un operador, la transmisión de datos, la localización en la que se encuentra o el rumbo que sigue en ada momento, son cuestiones mucho más limitadas dado que opera en la columna de agua donde no acceden las señales GPS, WiFi, etc. La comunicación y control absoluto sobre el AUV solo se recupera cuando el vehículo asciende a la superficie. Las diferencias expuestas entre ambos vehículos condicionan también el tipo de misión que realiza uno u otro, pero también en grado de autonomía y las dimensiones con las que se pueden construir. Así existen USV de poco más de 1 m de eslora, con pesos inferiores a 40 Kg y autonomías de un máximo de 6 horas (e.g. https://www.oceanalpha.com/product-item/sl20/) , hasta otros con las dimensiones de un gran navío tripulado (hasta 91 m de eslora y 2000 Tn de desplazamiento) y autonomía de meses y capacidad para navegar hasta 6.500 Km (e.g. https://sgp.fas.org/crs/weapons/R45757.pdf) . Sin embargo, los AUV presentan dimensiones menores, menor capacidad de carga y una autonomía más limitada. En el mercado hay UAV desde algo menos de 1 m de eslora, menos de 30 Kg de peso y autonomía máxima de 4 horas (e.g. https://www.lockheedmartin.com/enus/products/a-size-autonomous-underwater-vehicles.html) hasta vehículos de 7 m de eslora, 1.5 Tn, y 74 horas de autonomía (e.g. https://www.kongsberg.com/maritime/products/marine-robotics/autonomousunderwater-vehicles/AUV-hugin/#downloads) . Las diferentes características de un USV y un AUV determinan las aplicaciones para los que uno u otro son más adecuados. Sin embargo, los dos vehículos trabajando de forma coordinada, permiten una complementariedad que multiplica las capacidades de cada sistema por separado. Algunos ejemplos de aplicaciones que se benefician de esta colaboración son la prospección de recursos vivos y energéticos marinos, la vigilancia en aguas remotas desconocidas, las contramedidas frente a minas y la seguridad portuaria. En estas misiones, un AUV por sí solo puede no ser suficiente, ya carece de la capacidad de recorrer largas distancias a gran velocidad y, como se ha indicado, no puede comunicarse con un barco de superficie o con la costa sin salir a la superficie. Un USV, sin embargo, puede tener mayores dimensiones, capacidad de carga y autonomía, y se puede convertir en una buena plataforma móvil de lanzamiento y recuperación (LARS, del inglés de Launch and Recover y System) ya que puede realizar una navegación autónoma en un entorno marino desconocido (e.g. https://www.sea-kit.com/) . Además, el USV puede seguir operando como tal haciendo uso de sus propios sistemas de toma de datos. La configuración del caso de los USV suele ser o tipo monocasco, o tipo catamarán. En este tipo de sistemas colaborativos entre un USV y un AUV, el diseño del sistema LARS es vital, sobre todo cuando el control humano debe limitarse si se pretenden preservar los grados de autonomía que aportan ambos vehículos. El lanzamiento y la recuperación de una AUV es una de las operaciones de mayor riesgo que se realizan en estas operaciones. La función principal de un sistema autónomo de lanzamiento y recuperación es permitir que el AUV y sus cargas útiles se lleven a bordo del vehículo anfitrión, bien a un buque convencional bien a un USV, de manera segura, eficiente y sin daños. Los mecanismos de lanzamiento y recuperación de vehículos submarinos autónomos pueden ser de muchos tipos. En la literatura y en el mercado existen diferentes tipos de LARS. Los más sencillos se basan en redes de transporte y captura y cabos con mecanismos de suelta y enganche que son accionados manual o mecánicamente al vehículo anfitrión. Existen mecanismos rígidos, desde grúas, rampas de lanzado que forman parte del casco del vehículo anfitrión y que requiere de la acomodación del AUV en la bañera o en la bodega del vehículo anfitrión (e.g. https://www.sea-kit.com/) , brazos articulados que despliegan o recuperan al AUV acomodado en la cubierta del vehículo anfitrión por su popa (https://krakenrobotics.com/products/launch-recover y /) , o sistemas mixtos que emplean brazos articulados que despliegan una rampa de izado o arriado del AUV (e.g. https://www.hydro-international.com/content/news/this-is-howan-unmanned-launch-and-recover y -system-operates) . En todos estos casos es necesario el apoyo de un cabestrante eléctrico que eleva el peso de USV, restando su carta de pago. Estos cabestrantes, además, deben ser alimentados por baterías adicionales a las que incorpora el propio vehículo para su navegación. Estos mecanismos pueden ser de diferentes tamaños, adaptados no solo al tamaño del vehículo submarino autónomo a desplegar, sino también a las dimensiones, capacidades y características de la plataforma desde la que se despliega (un barco tripulado, un vehículo autónomo de superficie, una plataforma off-shore, el veril de un puerto, etc.) . En el caso concreto de los mecanismos rígidos, suelen conllevar pesos, dimensiones y requerimientos energéticos elevados, que impide su empleo en USV de pequeña eslora. En la actualidad se está trabajando en el desarrollo de LARS para USV de pequeña eslora. En algunos trabajos (e.g. https://ieeexplore.ieee.org/document/8469058) se ha esarrollado un sistema automatizado de lanzamiento y recuperación que permite transporta un AUV de 1, 6 m de eslora y 38, 5 Kg de peso a bordo de un USV de 4.05 m de eslora y 180 Kg de peso. En este diseño se monta una línea flexible en el USV para proporcionar un cable de conexión al AUV durante el lanzamiento y la recuperación. Esta línea puede extenderse hacia el agua durante la recuperación del AUV o permanecer retraída a bordo del USV. Para mantener la línea tensa bajo el agua se utiliza un hidrodeslizador con un peso en el extremo de la línea. Como en los casos anteriores se necesita un cabrestante para permitir que el conjunto de la línea se mueva dentro y fuera del agua. Un segundo cabrestante se utiliza para mover la estructura del carro dentro y fuera de la superficie del agua, para desplegar el AUV durante el lanzamiento y para izarlo a bordo del USV durante la recuperación. En otros trabajos (e.g. https://www.mdpi.com/1424-8220/20/9/2633/htm) el AUV permanece unido en todo momento al USV a través de un cable que se une a un cabestrante. Este sistema suministra energía continuamente al AUV y evita su pérdida, dado que en todo momento puede ser recuperado por el USV. Pero este mismo cable limita la capacidad de movimiento y la distancia a recorrer del AUV frente a las coordenadas en las que se encuentra el USV. En general, de estos mecanismos, los rígidos cumplen con el requisito de sujetar al AUV de una forma precisa y segura durante su transporte, lanzado y recuperación. Esto no ocurre con otros mecanismos como las redes o los cabos de sujeción, que no son rígidos y que son insuficientes para muchas aplicaciones. En los sistemas rígidos se deben cumplir al menos dos requisitos: que dispongan de algún medio para disipar la energía cinética el vehículo cuando impacta con el agua en las maniobras de arriado e izado, y que permitan que el vehículo se aleje del mecanismo de sujeción por sus propios medios. El dispositivo objeto de la invención es un sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , que es independiente de los dos vehículos mencionados, el cual está diseñado para su uso desde cualquier USV con doble casco de catamarán, que se sujeta a la parte inferior del USV mediante un sistema rígido de anclaje, que no emplea un sistema de cabestrantes para arriado e izado del AUV, que mantiene en todo momento al AUV por debajo de la línea de flotación del USV permitiendo que los sensores instalados a bordo de UAV se encuentren siempre sumergidos incluso mientras se produce el desplazamiento del USV, convirtiendo al AUV en un casco dicional del USV que se transforma en un trimarán, en el que la sujeción del AUV se realiza mediante un sistema de pinzas, y en el que el movimiento de las pinzas y el de elevación propia del LARS por encima de la línea de flotación del USV para evitar la resistencia hidrodinámica en la navegación del USV una vez liberado el AUV se produce mediante un grupo electrohidráulico equipado con una bomba de pistones de caudal variable autorregulada que se instala a bordo del USV. Todos los sistemas, rígidos o no, que componen el estado de la técnica actual tienen en común que mantienen al AUV fuera del nivel del agua durante el transporte hasta el punto de lanzado, y que una vez que el AUV es recuperado, este vuelve a izarse sobre el nivel del agua en la plataforma que lo ha desplegado. Algunos de estos ejemplos los tenemos en documentos de patentes CN109178260A, CN111874167, CN110775200A, así como en las publicaciones "A USV-Based automated launch and recover y system for AUVs" Edoardo I Sarda et al.o "Design of an Unconventional ASV for Underwater Vehicles Recover y : Simulation of the motions for operations in rough seas", Brizzolara et al. Siendo identificados los documentos anteriores como los más cercanos al objeto de la invención, es importante tener en cuenta que en ninguno de ellos se contempla la posibilidad de que el AUV se mantenga en todo momento por debajo de la línea de flotación del USV, incluso mientras se produce el desplazamiento de este. Esta característica básica del dispositivo objeto de la invención propuesta permite que los sensores instalados a bordo de AUV se encuentren siempre sumergidos y en funcionamiento y convierten al AUV en un casco adicional del USV. El hecho de que el AUV se mantenga sumergido en todo momento, incluso durante el desplazamiento del USV, permiten desarrollar dos tipos de tareas: misiones propias de un USV, empleando tanto sus propios sensores, así como misiones en las que además se emplee la sensórica disponible en el AUV que viaja inmovilizado por el LARS. Por otra parte, el hecho de que el AUV se mantenga sumergido y actúe como un tercer casco, convirtiendo al USV en un trimarán con casco triple híbrido, denominado de tipo SWASSH (Small Waterplane Area Single Stabilised Hull) , compuesto por la unión de un USV con casco de catamarán y un AUV con forma de torpedo, aporta evidentes entajas en la navegabilidad del conjunto. Una primera ventaja es que el casco central sumergido formado por el AUV aumenta la estabilidad en el sentido de navegación longitudinal, y los cascos laterales del USV mejoran la estabilidad transversal. Pero adicionalmente, este casco híbrido formado por la unión del USV y el AUV disminuye el área mojada del doble casco del USV, necesita menos potencia del motor a velocidades moderadamente altas y disminuye la resistencia a la formación de olas. EXPLICACIÓN DE LA INVENCIÓN La invención es un dispositivo automático y rígido, para lanzar y recuperar (LARS) vehículos submarinos autónomos (AUV) desde un vehículo de superficie no tripulado (USV) con casco de catamarán, en un concepto absolutamente novedoso que se ha desarrollado en el seno del Proyecto KTTSeaDrones, cofinanciado por el Fondo Europeo de Desarrollo Regional FEDER a través del programa Interreg V-A España-Portugal (POCTEP) 2014-2020. El dispositivo es independiente de los dos vehículos mencionados y está dotado de un sistema de anclaje para su unión a la parte inferior del USV mediante un sistema rígido y de sistema hidráulico de pinza de costilla con capacidad para adaptarse a distintos diámetros para la sujeción del AUV que lo mantiene en todo momento por debajo de la línea de flotación del USV. Esta característica del confiere al sistema los siguientes efectos técnicos: a) Permite que los sensores instalados a bordo de UAV se encuentren siempre sumergidos y operativos. De esta forma, el USV podrá desarrollar dos tipos de tareas: 1) misiones propias de un USV, empleando tanto sus propios sensores como la sensórica disponible en el AUV, y 2) vehículo con elevada autonomía para el transporte del AUV hasta la zona de trabajo, en la que podrá lanzarlo y posteriormente recuperarlo. b) Permite que el AUV actúe como un tercer casco, convirtiendo al USV en un trimarán con casco triple híbrido, denominado de tipo SWASSH (Small Waterplane Area Single Stabilised Hull) , compuesto por la unión de un USV con casco de catamarán y un AUV con forma de torpedo, lo cual aporta evidentes ventajas en la navegabilidad del conjunto. El sistema hidráulico de pinza de costilla es capaz de adaptarse a distintos diámetros de UAV y está fabricado en aluminio naval anodizado para aligerar peso, soportar la carga, y mejorar las propiedades frente al desgaste por fricción en el AUV y la corrosión en agua de mar. El movimiento de las costillas de pinza es generado por dos ejes huecos, que corren opuestos y son accionados hidráulicamente por dos pistones laterales. Un tercer pistón superior permite elevar el sistema por encima de la línea de flotación del USV una vez que el AUV se ha desplegado para evitar la resistencia hidrodinámica en la navegación del USV y bajarlo cuando el AUV deba ser recuperado. El grupo electrohidráulico va equipado con una bomba de pistones de caudal variable autorregulada y se instala a bordo del USV. La disposición del AUV bajo la estructura del catamarán que conforma el USV reduce la necesidad del empleo de sistemas de cabestrantes para el arriado e izado de todo el sistema, disminuye la ocupación y los pesos a bordo de USV, mejora la estabilidad del USV catamarán al convertirlo en una embarcación trimarán, permite que los sensores del AUV actúen como sensores propios del ASV en aguas someras, y permite que el AUV sea transportado de forma autónoma y sin consumo energético hasta el punto de trabajo gracias a la mayor autonomía del USV que lo transporta. Entre las ventajas que derivan de la configuración del LARS objeto de la invención, derivadas de la unión del USV y AUV, adoptando una configuración de casco triple híbrido de tipo SWASSH, interesa mencionar: a) Permite su desplazamiento del conjunto a una velocidad mayor y menor consumo a la que podría desplazarse un USV con casco de catamarán. b) La elevación del dispositivo por encima de la línea de flotación del USV, una vez liberado el AUV, convierte al USV nuevamente en un catamarán, dotándolo de mayor maniobrabilidad. c) Permite que durante la navegación el AUV puede activar todos sus sensores, multiplicando las prestaciones del USV que lo transporta. Cada uno de estos vehículos dispone de un sistema de navegación independiente, que recibe la información de los sensores de posición, velocidad y aceleración del vehículo. En el caso de los AUV, estos sistemas de navegación funcionan correctamente cuando el vehículo se encuentra sumergido a una determinada profundidad, que por lo general debe de ser e un mínimo de tres metros para evitar los efectos de oleaje en superficie. Teniendo en cuenta la distancia mínima de navegación del AUV respecto al fondo marino, que no debe de ser nunca inferior a los 2 metros, estamos hablando de que un AUV puede empezar a realizar misiones en fondos de 5 metros de profundidad o más, pero nunca en fondos más someros. Esto deja fuera de su campo de acción las zonas marinas más cercanas a costa, en fondos de 0 a 5 metros de profundidad. Sin embargo, cuando el AUV se encuentra incorporado como tercer casco del USV en una configuración tipo SWASSH, es el sistema de navegación del USV el que coordina la navegación con el sistema de guiado y control del vehículo. La ventaja se produce debido a que el USV tiene poco calado, normalmente inferior a 40 cm. Eso permite que el AUV opere esclavo al USV en zonas de costa a partir de 50 cm a 1 m de profundidad, vetado para el AUV cuando este navega por sus propios medios. d) Mientras el AUV está siendo transportado por el USV, actúa como un tercer casco muy cerca de la superficie, permitiendo que su antena permanezca siempre fuera del agua, asegurando una comunicación Wi-fi continua entre el AUV y el USV que lo porta. Los AUV suelen disponer de una antena que permite comunicar el vehículo con la estación de control a través de Wi-fi. Durante esta comunicación, el operador del vehículo puede programar la misión que realizará el AUV o descargarse los datos que este ha recopilado. Pero esta comunicación requiere que el vehículo y el operador se encuentren muy cercanos. En el caso del AUV funcionando como tercer casco de la configuración tipo SWASSH, la antena permanece siempre fuera del agua, asegurando una comunicación Wi-fi continua entre el AUV y el USV que lo porta. La comunicación entre el operador y el AUV ya no se produce de forma directa, lo que limita la distancia a la que estos se pueden encontrar, sino a través de los sistemas de comunicación del USV incluyendo radio, que debido a su mayor carta de pago siempre son más robustos y fiables que los del AUV. BREVE DESCRIPCIÓN DE LOS DIBUJOS Para complementar la descripción que se está realizando y con objeto de ayudar a una mejor comprensión de las características de la invención, se acompaña como parte integrante de dicha descripción, un conjunto de dibujos en donde, con carácter ilustrativo y no limitativo, se ha representado lo siguiente: Figura 1.- Tanto la figura 1a como 1b muestra un esquema de los distintos modos de funcionamiento que permite el sistema objeto de la invención. Las referencias empleadas corresponden a: a. Vehículo autónomo de superficie (en adelante USV) . b. Vehículo autónomo submarino (en adelante AUV) . c. Redes de satélites. d. Estación de control. w. Masa de agua. h1. Profundidad a la que el USV puede tomar datos mediante sus propios sensores. h2. Profundidad a la que el AUV puede tomar datos mediante sus sensores, mientras se encuentra fijo al USV. h3. Profundidad a la que el AUV puede tomar datos mediante sus sensores, una vez ha sido liberado del USV. En estas figuras se contempla: A. Muestra el trabajo del USV transportando un AUV. En este apartado se esquematiza que, sobre una masa de agua (w) , oceánica o continental, navega un vehículo autónomo de superficie (a) con casco de catamarán que opera de forma autónoma seguido a una distancia y con una autonomía determinada por sus capacidades. Este vehículo puede tomar datos mediante sus sensores hasta una profundidad (h1) determinada por las capacidades de estos sensores, mientras porta un vehículo autónomo submarino (b) a modo de un tercer casco que convierte al catamarán en un trimarán. B. Muestra el AUV a modo cabeza sensórica, mientras va sujeto al USV. En este apartado se expresa que el USV (a) también puede transportar el AUV (b) mientras esta toma datos con sus propios sensores, hasta una profundidad (h2) determinada por las capacidades de estos sensores. Tanto en la etapa descrita en A como en la etapa descrita en B, el AUV (b) se mantiene unido al USV (a) mediante el sistema objeto de la invención. C. Muestra el AUV (b) desplegado tras la apertura del LARS objeto de la invención. En este apartado se indica que el USV también puede desplegar el AUV para que este baje hasta la profundidad que determine su capacidad (h3) y trabaje de forma autónoma. Figura 2.- Muestra una vista frontal de la invención, con las pinzas en trazo continuo mostrando la posición cerrada, y con trazo discontinuo mostrando la posición abierta. La vista frontal puede corresponder indistintamente con la proa o popa del USV en el que se monta la invención. La única condición es que el AUV se debe sujetar con su proa coincidiendo con la proa de USV. En esta figura se distinguen: 1. Bloque central. 2. Pinzas en posición cerrada. 2. Pinzas en posición abierta. 3. Pistones laterales. 4. Lengüetas de unión de los pistones laterales. 5. Ejes de giro de las pinzas. 6. Barras solidarias con los pistones laterales. 7. Barras para dar consistencia al conjunto de pinzas. 8. Topes. 9. Barras soldadas, que atraviesan el bloque (1) y le dan consistencia. 10. Pistón superior. 11. Sistema de anclaje con el USV. Figura 3.- Muestra una vista lateral de la invención, con las cuatro pinzas de uno de los costados en posición cerrada. La vista lateral puede corresponder indistintamente con el costado de babor o estribor. En esta figura se distinguen: 1. Bloque central. 2. a Pinzas engranadas. 2. b Pinzas no engranadas. 3. Pistones laterales. 4. Lengüetas de unión de los pistones laterales. 5. Ejes de giro de las pinzas. 6. Barras solidarias con los pistones laterales. 7. Barras para dar consistencia al conjunto de pinzas. 8. Topes. 9. Barras soldadas, que atraviesan el bloque (1) y le dan consistencia. 10. Pistón superior. 11. Sistema de anclaje con el USV. Figura 4 - Muestra una vista frontal de la invención, con las pinzas en trazo continuo mostrando la posición abierta, y con trazo discontinuo mostrando la posición cerrada. En esta figura se distinguen: 2. Pinzas en posición abierta. 3. Pistones laterales. 5. Ejes de giro de las pinzas. 6. Barras solidarias con los pistones laterales. 7. Barras para dar consistencia al conjunto de pinzas. 10. Pistón superior. 11. Sistema de anclaje con el USV. Figura 5.- Muestra una vista frontal de la invención, con una perspectiva del interior del bloque central, en la que se observan con pinzas engrandas y la barra de sujeción del pistón superior. En esta figura se distinguen: 2. Pinzas en posición cerrada. 2. Pinzas en posición abierta. 5. Ejes de giro de las pinzas. 9. Barras soldadas, que atraviesan el bloque (1) y le dan consistencia. 10. Pistón superior. 11. Sistema de anclaje con el USV. 12. Barra de sujeción. Figura 6.- Muestra una vista frontal de la invención, con las pinzas en posición abierta, y con una perspectiva interior del bloque central, en la que se observa el pistón superior contraído, lo que permite retraer el sistema de anclaje y elevar la invención hacia el USV que lo porta. En esta figura se distinguen: 2. Pinzas en posición abierta. 3. Pistones laterales. 6. Barras solidarias con los pistones laterales. 10. Pistón superior. 11. Sistema de anclaje con el USV. 12. Barra de sujeción. Figura 7.- Muestra una imagen de los distintos tipos de pinzas de la invención, con engranajes y sin ellos. En esta figura se distinguen: 2.a Pinzas engranadas. 2.b Pinzas no engranadas. 5. Ejes de giro de las pinzas. 6. Barras solidarias con los pistones laterales. 7. Barras para dar consistencia al conjunto de pinzas. Figura 8.- Muestra un esquema de funcionamiento de la invención sujetando un AUV entre sus pinzas, con todos los mecanismos bloqueados, lo que permite que el USV navegue usando el AUV como un tercer patín a modo de trimarán. El símbolo 0 representa función bloqueada y el símbolo ft representa el sentido de un movimiento. En esta maniobra, el avance se produce por el USV en el que se ha instalado la invención. Durante la misma el AUV actúa como un tercer casco del USV catamarán, convirtiéndolo en un trimarán. Los pistones solidarios con las pinzas (3) permanecen en su máxima extensión manteniendo las pinzas cerradas. El pistón superior (10) que permite izar la invención hacia el USV permanece en su máxima extensión, lo que asegura que el AUV esté completamente sumergido. Durante este tipo de maniobra el AUV puede ser simplemente transportado por el USV (A de la Figura 1) o registrar datos con sus propios sensores (B de la Figura 1) . Figura 9.- Muestra un esquema de funcionamiento de la invención en el momento en el que se produce la liberación del AUV mediante la apertura de las pinzas. El símbolo 0 representa función bloqueada y el símbolo ft representa el sentido de un movimiento. En esta maniobra, el USV permanece parado, y la maniobra no se produce de manera brusca como en el caso de otros sistemas de lanzado y recuperación, dado que el AUV ya se encuentra bajo la superficie. En esta maniobra los pistones solidarios con las pinzas (3) se cierran, dando lugar a la apertura de las pinzas y a la liberación del AUV. El pistón superior (10) que permite izar la invención hacia el USV permanece en su máxima extensión, lo que asegura la maniobra no ponga en riesgo al AUV, que está completamente sumergido. Figura 10.- Muestra un esquema de funcionamiento de la invención en el momento en el que todo el sistema se eleva hacia el USV, permitiendo que el AUV inicie su navegación de forma independiente. El símbolo 0 representa función bloqueada y el símbolo ft representa el sentido de un movimiento. En esta maniobra, el pistón superior (10) que permite izar la invención hacia el USV se cierra, levantando la invención hasta una altura que permite que el AUV inicie sus propias maniobras sin riesgo (C de la Figura 1) . Los pistones solidarios con las pinzas (3) permanecen en su posición de menor extensión, lo que evita que las pinzas se cierren. Figura 11.- Muestra un esquema de funcionamiento de la invención en el momento en el que todo el sistema se sitúa sobre el AUV permitiendo su recogida y sujeción al USV. En esta maniobra, finalizada la misión del AUV, este permanece parado en la superficie. El USV se coloca sobre él. El pistón superior (10) que permite izar la invención hacia el USV se abre al máximo, introduciendo la invención nuevamente en el agua, a una distancia que permite recoger el USV. Los pistones solidarios con las pinzas (3) se abren hasta su máxima extensión, cerrando las pinzas sobre el cuerpo del AUV y sujetándolo nuevamente. REALIZACIÓN PREFERENTE DE LA INVENCIÓN El dispositivo objeto de la invención consiste en un sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , que es independiente de los dos vehículos mencionados, el cual está diseñado para su uso desde cualquier USV con casco de catamarán, que está dotado de un sistema de anclaje para su unión a la parte inferior del USV y una serie de pinzas de costilla para la sujeción del AUV, que lo sitúan por debajo de la línea de flotación del USV y lo convierten en un casco adicional, dotando al conjunto de una configuración a modo de trimarán con casco triple híbrido (SWASSH) , lo cual elimina la necesidad de emplear sistemas de cabestrantes para arriado e izado del AUV y permite que los sensores instalados a bordo de UAV se encuentren siempre sumergidos incluso mientras se produce el desplazamiento del USV, y en el que el movimiento de las pinzas y el de elevación propia del LARS por encima de la línea de flotación del USV, para evitar la resistencia hidrodinámica en la navegación del USV una vez liberado el AUV, se produce mediante un grupo electrohidráulico equipado con una bomba de pistones de caudal variable autorregulada que se instala a bordo del USV. En esta exposición detallada de la invención y con objeto de simplificar la descripción se omiten elementos de equipo que pueden considerarse convencionales: tornillería, pasadores, tuberías, cables, etc., que pueden ser modificados en función del interés de usuario. El sistema objeto de la invención debe sujetarse a la parte inferior del USV, manteniendo al AUV siempre debajo de su línea de flotación, lo cual lo convierte en un casco adicional a los del USV. Esta ubicación elimina la necesidad de emplear sistemas de cabestrantes para arriado e izado del mismo. El movimiento del sistema se consigue empleando un grupo electrohidráulico equipado con una bomba de pistones de caudal variable autorregulada que se instala a bordo del USV, mediante la cual se acciona tanto el pistón (10) situado en la parte superior del sistema, el cual permite elevar el sistema desde el USV una vez que el AUV se ha desplegado, o bajarlo cuando el AUV deba ser recuperado, como los pistones (3) situados en los laterales del sistema que mediante la acción de cierre/apertura permiten el movimiento de una serie de pinzas de costillas que sirven de soporte del AUV. Este grupo y la bomba serán comerciales y adecuados a las dimensiones y pesos del AUV que se pretende manipular, como lo será el material de fabricación de sus componentes o el grado de protección frente a la humedad. Un Bloque central (1) da soporte al sistema. En su parte superior cuenta con un agujero circular que permite el paso del sistema de anclaje con el USV (11) . En su parte media sirve de soporte de los pistones (3) que van unidos a las barras pasantes (6) que dan soporte y dotan de movimiento a las pinzas (2) . Finalmente, en las caras anterior y posterior de su parte inferior alberga cuatro agujeros pasantes, dos destinados a ubicar las barras (9) que lo atraviesan y le dan consistencia y dos destinados a ubicar los ejes de giro (5) de las pinzas (2.a y 2.b) , mientras que en las caras laterales de su parte inferior presenta huecos para que la parte superior de las dos pinzas (2.a) se puedan introducir en su interior al girar solidarias a los ejes (5) que discurren por su interior. El sistema cuenta con cuatro pinzas, dos de ellas engranadas por su parte superior (2.a) y otras dos no engranadas (2.b) . Estas pinzas poseen forma geométrica de lúnula con objeto de que al cerrarse generen un espacio hueco circular que permita sujetar n AUV y su parte inferior presenta forma de uña abierta 25° con respecto al interior de la pinza, que permitirá mejorar la maniobra de recogida del AUV desde el USV y sujetar AUV con un diámetro de hasta el 38% superior al del AUV concebido para ser sujetado con las pinzas cerradas. El tamaño de las pinzas dependerá del diámetro del cilindro que conforma el cuerpo de los USV. Cada una de estas pinzas están dotadas de seis agujeros pasantes (tres en cada garra) : - El agujero superior de cada garra permite el paso de un eje de rotación de las pinzas (5) que atraviesa el bloque (1) . - El agujero intermedio permite el paso de una barra (6) solidaria con los pistones (3) que abren y cierran las pinzas. - El agujero inferior permite el paso de una barra (7) que le confiere consistencia al conjunto de pinzas. Cada una de estas garras se encuentran soldadas, en los puntos por los que son atravesadas, a los ejes de giro (5) a las barras pasantes (6) y a las barras pasantes (7) . Las pinzas engrandadas (2.a) , se encuentran en el interior del bloque (1) , dos a cada lado del bloque, y engranan con la simétrica del otro lado del bloque. Estas pinzas junto con las no engranadas (2.b) están soldadas a los ejes de rotación (5) , que atraviesan el bloque (1) desde la parte delantera a la trasera hasta acabar en sus extremos en dos topes (8) , que obtienen su consistencia gracias a dos varillas soldadas (9) que atraviesan el bloque. Dos pistones laterales (3) , uno a cada lado del bloque central (1) , que unidos por uno de sus extremos a este mediante lengüetas soldadas (4) , por su extremo distal presentan un agujero pasante, a través del cual discurrirán las barras pasantes (6) . La apertura/cierre de las pinzas se produce mediante la acción de cierre/apertura de los pistones, que son controlados por un grupo electrohidráulico equipado con una bomba de pistones de caudal variable autorregulada y se instala a bordo del USV. El cierre de las pinzas (2.a y 2.b) se produce mediante la elongación de los pistones laterales (3) , mientras que la apertura de las pinzas (2.a y 2.b) se produce mediante la ontracción de los pistones laterales (3) . Cuando los dos pistones (3) se cierran, actúan sobre las barras pasantes (6) que atraviesa las pinzas, cuatro a cada lado del bloque central (1) , mientras, los ejes de rotación (5) giran a demanda. Los pistones serán comerciales y se adecuarán a las dimensiones y pesos del AUV a soportar. De igual modo puede variar el material de fabricación en función del grado de protección a la humedad del que se le quiera dotar. La unión de los pistones laterales (3) al cuerpo central (1) se realiza mediante lengüetas de unión (4) Dos barras solidarias con los pistones laterales (6) , transcurren por el interior del agujero de la parte distal del pistón cuya función es, además de dar soporte a las pinzas (2.a y 2.b) , dotarlas del movimiento necesario para sujetar o liberar la sujeción del AUV. El sistema cuenta además con otras dos barras para dar consistencia al conjunto de pinzas (7) y dos ejes de giro de las pinzas (5) , que atraviesan el bloque central (1) desde su parte frontal a la trasera, uno a cada lado, y que acaban en cada extremo atravesando el tope (8) sobre el que giran libres. En los extremos delantero y trasero del bloque central (1) se encuentran dos topes (8) que permiten el movimiento de los ejes de giro de las pinzas, y que se encuentran unidos entre sí por dos barras soldadas (9) que atraviesan el bloque y que le dan consistencia. Un pistón superior (10) , que se encuentra, como su propio nombre indica, situado en la parte superior del bloque (1) , va unido solidariamente a la tapa superior del sistema de anclaje con el USV (11) . La subida del sistema desde el USV, una vez se ha desplegado el AUV, se produce mediante la contracción del pistón superior (10) , mientras que la bajada del sistema desde el USV, para recuperar y dar soporte al AUV, se produce mediante la elongación del pistón superior (10) . Un sistema de anclaje con el USV (11) , compuesto por un cilindro y una tapa superior de forma circular, va unido de manera solidaria el pistón superior (19) . Por último, una barra de sujeción (12) va unida a la parte inferior del pistón superior (19) y soldada a las caras internas de los laterales del bloque (1) . Cuando el sistema se encuentra sujetando el AUV entre sus pinzas, los pistones laterales solidarios con las pinzas (3) permanecen en su máxima extensión manteniendo las pinzas cerradas y el pistón superior (10) permanece en su máxima extensión, lo que asegura que el AUV esté completamente sumergido. Cuando el sistema se encuentra durante la maniobra de lanzado los pistones laterales solidarios con las pinzas (3) se cierran, dando lugar a la apertura de las pinzas y a la liberación del AUV y el pistón superior (10) permanece en su máxima extensión, lo que asegura que la maniobra no ponga en riesgo al AUV, que está completamente sumergido. Para subir el sistema hacia el USV, el pistón superior (10) se cierra, levantando la invención hasta una altura que permite que el AUV inicie sus propias maniobras sin riesgo y los pistones laterales solidarios con las pinzas (3) permanecen en su posición de menor extensión, lo que evita que las pinzas se cierren. Durante la maniobra de recuperación del AUV, con el USV sobre el AUV, el pistón superior (10) se abre al máximo, introduciendo el sistema en el agua, a una distancia que permite recoger el USV y los pistones solidarios con las pinzas (3) se abren hasta su máxima extensión, cerrando las pinzas sobre el cuerpo del AUV. La configuración del sistema objeto de la invención permite realizar las siguientes maniobras: a. fijar temporalmente un AUV (b) a la estructura de un USV (a) , permitiendo que todo el cuerpo del AUV (b) permanezca sumergido en todo momento, b. portar el AUV (b) dentro de la masa de agua mientras el USV (a) se desplaza sobre la misma con sus propios medios de propulsión, a rumbo GPS programado y apoyado por las redes de satélites (c) o de forma controlada desde una estación de control situada en tierra o a bordo de un barco de apoyo (d) , c. tomar datos del medio marino a través de los sensores del USV (a) mientras que el AUV (b) se encuentra soportado por este, sin entorpecer con el cuerpo del AUV (b) la recepción de datos o las maniobras necesarias a para la toma de los mismos, y hasta una profundidad (h1) determinada por las capacidades de estos sensores, d. tomar datos del medio marino a través de los sensores del AUV (b) , mientras este se encuentra fijo al USV (a) , sin que la presencia del USV (b) que lo porta entorpezca la recepción de datos, y hasta una profundidad (h2) determinada por las capacidades de estos sensores, e. lanzar en un punto predeterminado el AUV (b) que se encuentra fijado al USV (a) sin poner en riesgo la integridad de ninguno de los vehículos, ni las maniobras de navegación del AUV (b) una vez liberado, para que pueda bajar hasta la profundidad que determine su capacidad (h3) y trabaje de forma autónoma, f. recoger el AUV (b) cuando este haya finalizado su misión y se encuentre en superficie, para volver a fijarlo al USV (a) sin poner en riesgo la integridad de ninguno de los vehículos, ni las maniobras de navegación del USV (a) una vez que se haya fijado en AUV (b) . Como se ha indicado anteriormente en la descripción del grupo electrohidráulico y la bomba, así como en el caso de los pistones, los materiales del resto de componentes del sistema pueden variar en función del grado de protección a la humedad del que se quiera dotar. Con carácter ilustrativo y no limitativo, se indica que, en una realización del sistema: - Las pinzas (2.a y 2.b) , las piezas que conforman la caja del bloque central (1) , el sistema de anclaje (11) y los topes (8) se han construido a partir de plancha de aluminio naval Al-Mg AA5083, con un tratamiento de anodizado duro, lo que mejora sus propiedades frente a la corrosión y el desgaste. - Las barras (5) , (6) , (7) y (9) se han fabricado en acero inoxidable calidad AISI 316L. - La tornillería empleada ha sido de acero inoxidable calidad AISI 316L aisladas con teflón para evitar el contacto eléctrico con el aluminio.
+ ES-2955225_A1 SISTEMA RÍGIDO DE LANZAMIENTO Y RECUPERACIÓN DE UN VEHÍCULO AUTÓNOMO SUBMARINO DESDE UN VEHÍCULO AUTÓNOMO MARINO DE SUPERFICIE SECTOR DE LA TÉCNICA Tecnología marina aplicada a vehículos autónomos marinos. ANTECEDENTES DE LA INVENCIÓN La Universidad de Cádiz dispone de un conjunto de vehículos no tripulados, marinos y aéreos que, frente a los clásicos barcos oceanográficos, sumergibles o aeronaves, le permiten llevar a cabo diversas misiones científicas a un menor coste, más largas y comprometidas, con mayor seguridad para el personal que los opera, y con capacidad de un despliegue más rápido en zonas de difícil acceso o vetadas para otros vehículos tripulados. En este documento se hace referencia al uso de dos tipos de vehículos autónomos: - Por un lado, se hace referencia al uso de la invención propuesta en un vehículo autónomo marino de superficie (conocido por sus siglas en ingles USV, Unmanned Surface Vehicle o ASC, Autonomous Surface Craft) . Su configuración es similar a la de un barco tradicional, pero puede ser operados de forma totalmente autónoma, mediante la programación previa de una ruta, o de forma semiautónoma, con el control ejercido desde una estación de control en tierra o a bordo de otra embarcación. Dado que opera sobre la superficie de mares o lagos, su localización es precisa, la comunicación vehículo-operador es inmediata y la transmisión de datos a tiempo real es inmediata. - Por otro lado, también se hace referencia al uso de la invención propuesta en un vehículo autónomo submarino (AUV, del inglés de Autonomous Underwater Vehicle) , que posee una arquitectura de control que le permite realizar misiones bajo el agua sin la supervisión de un operador, con las misiones y navegación previamente programadas. A diferencia del USV, su control en tiempo real por un operador, la transmisión de datos, la localización en la que se encuentra o el rumbo que sigue en ada momento, son cuestiones mucho más limitadas dado que opera en la columna de agua donde no acceden las señales GPS, WiFi, etc. La comunicación y control absoluto sobre el AUV solo se recupera cuando el vehículo asciende a la superficie. Las diferencias expuestas entre ambos vehículos condicionan también el tipo de misión que realiza uno u otro, pero también en grado de autonomía y las dimensiones con las que se pueden construir. Así existen USV de poco más de 1 m de eslora, con pesos inferiores a 40 Kg y autonomías de un máximo de 6 horas (e.g. https://www.oceanalpha.com/product-item/sl20/) , hasta otros con las dimensiones de un gran navío tripulado (hasta 91 m de eslora y 2000 Tn de desplazamiento) y autonomía de meses y capacidad para navegar hasta 6.500 Km (e.g. https://sgp.fas.org/crs/weapons/R45757.pdf) . Sin embargo, los AUV presentan dimensiones menores, menor capacidad de carga y una autonomía más limitada. En el mercado hay UAV desde algo menos de 1 m de eslora, menos de 30 Kg de peso y autonomía máxima de 4 horas (e.g. https://www.lockheedmartin.com/enus/products/a-size-autonomous-underwater-vehicles.html) hasta vehículos de 7 m de eslora, 1.5 Tn, y 74 horas de autonomía (e.g. https://www.kongsberg.com/maritime/products/marine-robotics/autonomousunderwater-vehicles/AUV-hugin/#downloads) . Las diferentes características de un USV y un AUV determinan las aplicaciones para los que uno u otro son más adecuados. Sin embargo, los dos vehículos trabajando de forma coordinada, permiten una complementariedad que multiplica las capacidades de cada sistema por separado. Algunos ejemplos de aplicaciones que se benefician de esta colaboración son la prospección de recursos vivos y energéticos marinos, la vigilancia en aguas remotas desconocidas, las contramedidas frente a minas y la seguridad portuaria. En estas misiones, un AUV por sí solo puede no ser suficiente, ya carece de la capacidad de recorrer largas distancias a gran velocidad y, como se ha indicado, no puede comunicarse con un barco de superficie o con la costa sin salir a la superficie. Un USV, sin embargo, puede tener mayores dimensiones, capacidad de carga y autonomía, y se puede convertir en una buena plataforma móvil de lanzamiento y recuperación (LARS, del inglés de Launch and Recover y System) ya que puede realizar una navegación autónoma en un entorno marino desconocido (e.g. https://www.sea-kit.com/) . Además, el USV puede seguir operando como tal haciendo uso de sus propios sistemas de toma de datos. La configuración del caso de los USV suele ser o tipo monocasco, o tipo catamarán. En este tipo de sistemas colaborativos entre un USV y un AUV, el diseño del sistema LARS es vital, sobre todo cuando el control humano debe limitarse si se pretenden preservar los grados de autonomía que aportan ambos vehículos. El lanzamiento y la recuperación de una AUV es una de las operaciones de mayor riesgo que se realizan en estas operaciones. La función principal de un sistema autónomo de lanzamiento y recuperación es permitir que el AUV y sus cargas útiles se lleven a bordo del vehículo anfitrión, bien a un buque convencional bien a un USV, de manera segura, eficiente y sin daños. Los mecanismos de lanzamiento y recuperación de vehículos submarinos autónomos pueden ser de muchos tipos. En la literatura y en el mercado existen diferentes tipos de LARS. Los más sencillos se basan en redes de transporte y captura y cabos con mecanismos de suelta y enganche que son accionados manual o mecánicamente al vehículo anfitrión. Existen mecanismos rígidos, desde grúas, rampas de lanzado que forman parte del casco del vehículo anfitrión y que requiere de la acomodación del AUV en la bañera o en la bodega del vehículo anfitrión (e.g. https://www.sea-kit.com/) , brazos articulados que despliegan o recuperan al AUV acomodado en la cubierta del vehículo anfitrión por su popa (https://krakenrobotics.com/products/launch-recover y /) , o sistemas mixtos que emplean brazos articulados que despliegan una rampa de izado o arriado del AUV (e.g. https://www.hydro-international.com/content/news/this-is-howan-unmanned-launch-and-recover y -system-operates) . En todos estos casos es necesario el apoyo de un cabestrante eléctrico que eleva el peso de USV, restando su carta de pago. Estos cabestrantes, además, deben ser alimentados por baterías adicionales a las que incorpora el propio vehículo para su navegación. Estos mecanismos pueden ser de diferentes tamaños, adaptados no solo al tamaño del vehículo submarino autónomo a desplegar, sino también a las dimensiones, capacidades y características de la plataforma desde la que se despliega (un barco tripulado, un vehículo autónomo de superficie, una plataforma off-shore, el veril de un puerto, etc.) . En el caso concreto de los mecanismos rígidos, suelen conllevar pesos, dimensiones y requerimientos energéticos elevados, que impide su empleo en USV de pequeña eslora. En la actualidad se está trabajando en el desarrollo de LARS para USV de pequeña eslora. En algunos trabajos (e.g. https://ieeexplore.ieee.org/document/8469058) se ha esarrollado un sistema automatizado de lanzamiento y recuperación que permite transporta un AUV de 1, 6 m de eslora y 38, 5 Kg de peso a bordo de un USV de 4.05 m de eslora y 180 Kg de peso. En este diseño se monta una línea flexible en el USV para proporcionar un cable de conexión al AUV durante el lanzamiento y la recuperación. Esta línea puede extenderse hacia el agua durante la recuperación del AUV o permanecer retraída a bordo del USV. Para mantener la línea tensa bajo el agua se utiliza un hidrodeslizador con un peso en el extremo de la línea. Como en los casos anteriores se necesita un cabrestante para permitir que el conjunto de la línea se mueva dentro y fuera del agua. Un segundo cabrestante se utiliza para mover la estructura del carro dentro y fuera de la superficie del agua, para desplegar el AUV durante el lanzamiento y para izarlo a bordo del USV durante la recuperación. En otros trabajos (e.g. https://www.mdpi.com/1424-8220/20/9/2633/htm) el AUV permanece unido en todo momento al USV a través de un cable que se une a un cabestrante. Este sistema suministra energía continuamente al AUV y evita su pérdida, dado que en todo momento puede ser recuperado por el USV. Pero este mismo cable limita la capacidad de movimiento y la distancia a recorrer del AUV frente a las coordenadas en las que se encuentra el USV. En general, de estos mecanismos, los rígidos cumplen con el requisito de sujetar al AUV de una forma precisa y segura durante su transporte, lanzado y recuperación. Esto no ocurre con otros mecanismos como las redes o los cabos de sujeción, que no son rígidos y que son insuficientes para muchas aplicaciones. En los sistemas rígidos se deben cumplir al menos dos requisitos: que dispongan de algún medio para disipar la energía cinética el vehículo cuando impacta con el agua en las maniobras de arriado e izado, y que permitan que el vehículo se aleje del mecanismo de sujeción por sus propios medios. El dispositivo objeto de la invención es un sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , que es independiente de los dos vehículos mencionados, el cual está diseñado para su uso desde cualquier USV con doble casco de catamarán, que se sujeta a la parte inferior del USV mediante un sistema rígido de anclaje, que no emplea un sistema de cabestrantes para arriado e izado del AUV, que mantiene en todo momento al AUV por debajo de la línea de flotación del USV permitiendo que los sensores instalados a bordo de UAV se encuentren siempre sumergidos incluso mientras se produce el desplazamiento del USV, convirtiendo al AUV en un casco dicional del USV que se transforma en un trimarán, en el que la sujeción del AUV se realiza mediante un sistema de pinzas, y en el que el movimiento de las pinzas y el de elevación propia del LARS por encima de la línea de flotación del USV para evitar la resistencia hidrodinámica en la navegación del USV una vez liberado el AUV se produce mediante un grupo electrohidráulico equipado con una bomba de pistones de caudal variable autorregulada que se instala a bordo del USV. Todos los sistemas, rígidos o no, que componen el estado de la técnica actual tienen en común que mantienen al AUV fuera del nivel del agua durante el transporte hasta el punto de lanzado, y que una vez que el AUV es recuperado, este vuelve a izarse sobre el nivel del agua en la plataforma que lo ha desplegado. Algunos de estos ejemplos los tenemos en documentos de patentes CN109178260A, CN111874167, CN110775200A, así como en las publicaciones "A USV-Based automated launch and recover y system for AUVs" Edoardo I Sarda et al.o "Design of an Unconventional ASV for Underwater Vehicles Recover y : Simulation of the motions for operations in rough seas", Brizzolara et al. Siendo identificados los documentos anteriores como los más cercanos al objeto de la invención, es importante tener en cuenta que en ninguno de ellos se contempla la posibilidad de que el AUV se mantenga en todo momento por debajo de la línea de flotación del USV, incluso mientras se produce el desplazamiento de este. Esta característica básica del dispositivo objeto de la invención propuesta permite que los sensores instalados a bordo de AUV se encuentren siempre sumergidos y en funcionamiento y convierten al AUV en un casco adicional del USV. El hecho de que el AUV se mantenga sumergido en todo momento, incluso durante el desplazamiento del USV, permiten desarrollar dos tipos de tareas: misiones propias de un USV, empleando tanto sus propios sensores, así como misiones en las que además se emplee la sensórica disponible en el AUV que viaja inmovilizado por el LARS. Por otra parte, el hecho de que el AUV se mantenga sumergido y actúe como un tercer casco, convirtiendo al USV en un trimarán con casco triple híbrido, denominado de tipo SWASSH (Small Waterplane Area Single Stabilised Hull) , compuesto por la unión de un USV con casco de catamarán y un AUV con forma de torpedo, aporta evidentes entajas en la navegabilidad del conjunto. Una primera ventaja es que el casco central sumergido formado por el AUV aumenta la estabilidad en el sentido de navegación longitudinal, y los cascos laterales del USV mejoran la estabilidad transversal. Pero adicionalmente, este casco híbrido formado por la unión del USV y el AUV disminuye el área mojada del doble casco del USV, necesita menos potencia del motor a velocidades moderadamente altas y disminuye la resistencia a la formación de olas. EXPLICACIÓN DE LA INVENCIÓN La invención es un dispositivo automático y rígido, para lanzar y recuperar (LARS) vehículos submarinos autónomos (AUV) desde un vehículo de superficie no tripulado (USV) con casco de catamarán, en un concepto absolutamente novedoso que se ha desarrollado en el seno del Proyecto KTTSeaDrones, cofinanciado por el Fondo Europeo de Desarrollo Regional FEDER a través del programa Interreg V-A España-Portugal (POCTEP) 2014-2020. El dispositivo es independiente de los dos vehículos mencionados y está dotado de un sistema de anclaje para su unión a la parte inferior del USV mediante un sistema rígido y de sistema hidráulico de pinza de costilla con capacidad para adaptarse a distintos diámetros para la sujeción del AUV que lo mantiene en todo momento por debajo de la línea de flotación del USV. Esta característica del confiere al sistema los siguientes efectos técnicos: a) Permite que los sensores instalados a bordo de UAV se encuentren siempre sumergidos y operativos. De esta forma, el USV podrá desarrollar dos tipos de tareas: 1) misiones propias de un USV, empleando tanto sus propios sensores como la sensórica disponible en el AUV, y 2) vehículo con elevada autonomía para el transporte del AUV hasta la zona de trabajo, en la que podrá lanzarlo y posteriormente recuperarlo. b) Permite que el AUV actúe como un tercer casco, convirtiendo al USV en un trimarán con casco triple híbrido, denominado de tipo SWASSH (Small Waterplane Area Single Stabilised Hull) , compuesto por la unión de un USV con casco de catamarán y un AUV con forma de torpedo, lo cual aporta evidentes ventajas en la navegabilidad del conjunto. El sistema hidráulico de pinza de costilla es capaz de adaptarse a distintos diámetros de UAV y está fabricado en aluminio naval anodizado para aligerar peso, soportar la carga, y mejorar las propiedades frente al desgaste por fricción en el AUV y la corrosión en agua de mar. El movimiento de las costillas de pinza es generado por dos ejes huecos, que corren opuestos y son accionados hidráulicamente por dos pistones laterales. Un tercer pistón superior permite elevar el sistema por encima de la línea de flotación del USV una vez que el AUV se ha desplegado para evitar la resistencia hidrodinámica en la navegación del USV y bajarlo cuando el AUV deba ser recuperado. El grupo electrohidráulico va equipado con una bomba de pistones de caudal variable autorregulada y se instala a bordo del USV. La disposición del AUV bajo la estructura del catamarán que conforma el USV reduce la necesidad del empleo de sistemas de cabestrantes para el arriado e izado de todo el sistema, disminuye la ocupación y los pesos a bordo de USV, mejora la estabilidad del USV catamarán al convertirlo en una embarcación trimarán, permite que los sensores del AUV actúen como sensores propios del ASV en aguas someras, y permite que el AUV sea transportado de forma autónoma y sin consumo energético hasta el punto de trabajo gracias a la mayor autonomía del USV que lo transporta. Entre las ventajas que derivan de la configuración del LARS objeto de la invención, derivadas de la unión del USV y AUV, adoptando una configuración de casco triple híbrido de tipo SWASSH, interesa mencionar: a) Permite su desplazamiento del conjunto a una velocidad mayor y menor consumo a la que podría desplazarse un USV con casco de catamarán. b) La elevación del dispositivo por encima de la línea de flotación del USV, una vez liberado el AUV, convierte al USV nuevamente en un catamarán, dotándolo de mayor maniobrabilidad. c) Permite que durante la navegación el AUV puede activar todos sus sensores, multiplicando las prestaciones del USV que lo transporta. Cada uno de estos vehículos dispone de un sistema de navegación independiente, que recibe la información de los sensores de posición, velocidad y aceleración del vehículo. En el caso de los AUV, estos sistemas de navegación funcionan correctamente cuando el vehículo se encuentra sumergido a una determinada profundidad, que por lo general debe de ser e un mínimo de tres metros para evitar los efectos de oleaje en superficie. Teniendo en cuenta la distancia mínima de navegación del AUV respecto al fondo marino, que no debe de ser nunca inferior a los 2 metros, estamos hablando de que un AUV puede empezar a realizar misiones en fondos de 5 metros de profundidad o más, pero nunca en fondos más someros. Esto deja fuera de su campo de acción las zonas marinas más cercanas a costa, en fondos de 0 a 5 metros de profundidad. Sin embargo, cuando el AUV se encuentra incorporado como tercer casco del USV en una configuración tipo SWASSH, es el sistema de navegación del USV el que coordina la navegación con el sistema de guiado y control del vehículo. La ventaja se produce debido a que el USV tiene poco calado, normalmente inferior a 40 cm. Eso permite que el AUV opere esclavo al USV en zonas de costa a partir de 50 cm a 1 m de profundidad, vetado para el AUV cuando este navega por sus propios medios. d) Mientras el AUV está siendo transportado por el USV, actúa como un tercer casco muy cerca de la superficie, permitiendo que su antena permanezca siempre fuera del agua, asegurando una comunicación Wi-fi continua entre el AUV y el USV que lo porta. Los AUV suelen disponer de una antena que permite comunicar el vehículo con la estación de control a través de Wi-fi. Durante esta comunicación, el operador del vehículo puede programar la misión que realizará el AUV o descargarse los datos que este ha recopilado. Pero esta comunicación requiere que el vehículo y el operador se encuentren muy cercanos. En el caso del AUV funcionando como tercer casco de la configuración tipo SWASSH, la antena permanece siempre fuera del agua, asegurando una comunicación Wi-fi continua entre el AUV y el USV que lo porta. La comunicación entre el operador y el AUV ya no se produce de forma directa, lo que limita la distancia a la que estos se pueden encontrar, sino a través de los sistemas de comunicación del USV incluyendo radio, que debido a su mayor carta de pago siempre son más robustos y fiables que los del AUV. BREVE DESCRIPCIÓN DE LOS DIBUJOS Para complementar la descripción que se está realizando y con objeto de ayudar a una mejor comprensión de las características de la invención, se acompaña como parte integrante de dicha descripción, un conjunto de dibujos en donde, con carácter ilustrativo y no limitativo, se ha representado lo siguiente: Figura 1.- Tanto la figura 1a como 1b muestra un esquema de los distintos modos de funcionamiento que permite el sistema objeto de la invención. Las referencias empleadas corresponden a: a. Vehículo autónomo de superficie (en adelante USV) . b. Vehículo autónomo submarino (en adelante AUV) . c. Redes de satélites. d. Estación de control. w. Masa de agua. h1. Profundidad a la que el USV puede tomar datos mediante sus propios sensores. h2. Profundidad a la que el AUV puede tomar datos mediante sus sensores, mientras se encuentra fijo al USV. h3. Profundidad a la que el AUV puede tomar datos mediante sus sensores, una vez ha sido liberado del USV. En estas figuras se contempla: A. Muestra el trabajo del USV transportando un AUV. En este apartado se esquematiza que, sobre una masa de agua (w) , oceánica o continental, navega un vehículo autónomo de superficie (a) con casco de catamarán que opera de forma autónoma seguido a una distancia y con una autonomía determinada por sus capacidades. Este vehículo puede tomar datos mediante sus sensores hasta una profundidad (h1) determinada por las capacidades de estos sensores, mientras porta un vehículo autónomo submarino (b) a modo de un tercer casco que convierte al catamarán en un trimarán. B. Muestra el AUV a modo cabeza sensórica, mientras va sujeto al USV. En este apartado se expresa que el USV (a) también puede transportar el AUV (b) mientras esta toma datos con sus propios sensores, hasta una profundidad (h2) determinada por las capacidades de estos sensores. Tanto en la etapa descrita en A como en la etapa descrita en B, el AUV (b) se mantiene unido al USV (a) mediante el sistema objeto de la invención. C. Muestra el AUV (b) desplegado tras la apertura del LARS objeto de la invención. En este apartado se indica que el USV también puede desplegar el AUV para que este baje hasta la profundidad que determine su capacidad (h3) y trabaje de forma autónoma. Figura 2.- Muestra una vista frontal de la invención, con las pinzas en trazo continuo mostrando la posición cerrada, y con trazo discontinuo mostrando la posición abierta. La vista frontal puede corresponder indistintamente con la proa o popa del USV en el que se monta la invención. La única condición es que el AUV se debe sujetar con su proa coincidiendo con la proa de USV. En esta figura se distinguen: 1. Bloque central. 2. Pinzas en posición cerrada. 2. Pinzas en posición abierta. 3. Pistones laterales. 4. Lengüetas de unión de los pistones laterales. 5. Ejes de giro de las pinzas. 6. Barras solidarias con los pistones laterales. 7. Barras para dar consistencia al conjunto de pinzas. 8. Topes. 9. Barras soldadas, que atraviesan el bloque (1) y le dan consistencia. 10. Pistón superior. 11. Sistema de anclaje con el USV. Figura 3.- Muestra una vista lateral de la invención, con las cuatro pinzas de uno de los costados en posición cerrada. La vista lateral puede corresponder indistintamente con el costado de babor o estribor. En esta figura se distinguen: 1. Bloque central. 2. a Pinzas engranadas. 2. b Pinzas no engranadas. 3. Pistones laterales. 4. Lengüetas de unión de los pistones laterales. 5. Ejes de giro de las pinzas. 6. Barras solidarias con los pistones laterales. 7. Barras para dar consistencia al conjunto de pinzas. 8. Topes. 9. Barras soldadas, que atraviesan el bloque (1) y le dan consistencia. 10. Pistón superior. 11. Sistema de anclaje con el USV. Figura 4 - Muestra una vista frontal de la invención, con las pinzas en trazo continuo mostrando la posición abierta, y con trazo discontinuo mostrando la posición cerrada. En esta figura se distinguen: 2. Pinzas en posición abierta. 3. Pistones laterales. 5. Ejes de giro de las pinzas. 6. Barras solidarias con los pistones laterales. 7. Barras para dar consistencia al conjunto de pinzas. 10. Pistón superior. 11. Sistema de anclaje con el USV. Figura 5.- Muestra una vista frontal de la invención, con una perspectiva del interior del bloque central, en la que se observan con pinzas engrandas y la barra de sujeción del pistón superior. En esta figura se distinguen: 2. Pinzas en posición cerrada. 2. Pinzas en posición abierta. 5. Ejes de giro de las pinzas. 9. Barras soldadas, que atraviesan el bloque (1) y le dan consistencia. 10. Pistón superior. 11. Sistema de anclaje con el USV. 12. Barra de sujeción. Figura 6.- Muestra una vista frontal de la invención, con las pinzas en posición abierta, y con una perspectiva interior del bloque central, en la que se observa el pistón superior contraído, lo que permite retraer el sistema de anclaje y elevar la invención hacia el USV que lo porta. En esta figura se distinguen: 2. Pinzas en posición abierta. 3. Pistones laterales. 6. Barras solidarias con los pistones laterales. 10. Pistón superior. 11. Sistema de anclaje con el USV. 12. Barra de sujeción. Figura 7.- Muestra una imagen de los distintos tipos de pinzas de la invención, con engranajes y sin ellos. En esta figura se distinguen: 2.a Pinzas engranadas. 2.b Pinzas no engranadas. 5. Ejes de giro de las pinzas. 6. Barras solidarias con los pistones laterales. 7. Barras para dar consistencia al conjunto de pinzas. Figura 8.- Muestra un esquema de funcionamiento de la invención sujetando un AUV entre sus pinzas, con todos los mecanismos bloqueados, lo que permite que el USV navegue usando el AUV como un tercer patín a modo de trimarán. El símbolo 0 representa función bloqueada y el símbolo ft representa el sentido de un movimiento. En esta maniobra, el avance se produce por el USV en el que se ha instalado la invención. Durante la misma el AUV actúa como un tercer casco del USV catamarán, convirtiéndolo en un trimarán. Los pistones solidarios con las pinzas (3) permanecen en su máxima extensión manteniendo las pinzas cerradas. El pistón superior (10) que permite izar la invención hacia el USV permanece en su máxima extensión, lo que asegura que el AUV esté completamente sumergido. Durante este tipo de maniobra el AUV puede ser simplemente transportado por el USV (A de la Figura 1) o registrar datos con sus propios sensores (B de la Figura 1) . Figura 9.- Muestra un esquema de funcionamiento de la invención en el momento en el que se produce la liberación del AUV mediante la apertura de las pinzas. El símbolo 0 representa función bloqueada y el símbolo ft representa el sentido de un movimiento. En esta maniobra, el USV permanece parado, y la maniobra no se produce de manera brusca como en el caso de otros sistemas de lanzado y recuperación, dado que el AUV ya se encuentra bajo la superficie. En esta maniobra los pistones solidarios con las pinzas (3) se cierran, dando lugar a la apertura de las pinzas y a la liberación del AUV. El pistón superior (10) que permite izar la invención hacia el USV permanece en su máxima extensión, lo que asegura la maniobra no ponga en riesgo al AUV, que está completamente sumergido. Figura 10.- Muestra un esquema de funcionamiento de la invención en el momento en el que todo el sistema se eleva hacia el USV, permitiendo que el AUV inicie su navegación de forma independiente. El símbolo 0 representa función bloqueada y el símbolo ft representa el sentido de un movimiento. En esta maniobra, el pistón superior (10) que permite izar la invención hacia el USV se cierra, levantando la invención hasta una altura que permite que el AUV inicie sus propias maniobras sin riesgo (C de la Figura 1) . Los pistones solidarios con las pinzas (3) permanecen en su posición de menor extensión, lo que evita que las pinzas se cierren. Figura 11.- Muestra un esquema de funcionamiento de la invención en el momento en el que todo el sistema se sitúa sobre el AUV permitiendo su recogida y sujeción al USV. En esta maniobra, finalizada la misión del AUV, este permanece parado en la superficie. El USV se coloca sobre él. El pistón superior (10) que permite izar la invención hacia el USV se abre al máximo, introduciendo la invención nuevamente en el agua, a una distancia que permite recoger el USV. Los pistones solidarios con las pinzas (3) se abren hasta su máxima extensión, cerrando las pinzas sobre el cuerpo del AUV y sujetándolo nuevamente. REALIZACIÓN PREFERENTE DE LA INVENCIÓN El dispositivo objeto de la invención consiste en un sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , que es independiente de los dos vehículos mencionados, el cual está diseñado para su uso desde cualquier USV con casco de catamarán, que está dotado de un sistema de anclaje para su unión a la parte inferior del USV y una serie de pinzas de costilla para la sujeción del AUV, que lo sitúan por debajo de la línea de flotación del USV y lo convierten en un casco adicional, dotando al conjunto de una configuración a modo de trimarán con casco triple híbrido (SWASSH) , lo cual elimina la necesidad de emplear sistemas de cabestrantes para arriado e izado del AUV y permite que los sensores instalados a bordo de UAV se encuentren siempre sumergidos incluso mientras se produce el desplazamiento del USV, y en el que el movimiento de las pinzas y el de elevación propia del LARS por encima de la línea de flotación del USV, para evitar la resistencia hidrodinámica en la navegación del USV una vez liberado el AUV, se produce mediante un grupo electrohidráulico equipado con una bomba de pistones de caudal variable autorregulada que se instala a bordo del USV. En esta exposición detallada de la invención y con objeto de simplificar la descripción se omiten elementos de equipo que pueden considerarse convencionales: tornillería, pasadores, tuberías, cables, etc., que pueden ser modificados en función del interés de usuario. El sistema objeto de la invención debe sujetarse a la parte inferior del USV, manteniendo al AUV siempre debajo de su línea de flotación, lo cual lo convierte en un casco adicional a los del USV. Esta ubicación elimina la necesidad de emplear sistemas de cabestrantes para arriado e izado del mismo. El movimiento del sistema se consigue empleando un grupo electrohidráulico equipado con una bomba de pistones de caudal variable autorregulada que se instala a bordo del USV, mediante la cual se acciona tanto el pistón (10) situado en la parte superior del sistema, el cual permite elevar el sistema desde el USV una vez que el AUV se ha desplegado, o bajarlo cuando el AUV deba ser recuperado, como los pistones (3) situados en los laterales del sistema que mediante la acción de cierre/apertura permiten el movimiento de una serie de pinzas de costillas que sirven de soporte del AUV. Este grupo y la bomba serán comerciales y adecuados a las dimensiones y pesos del AUV que se pretende manipular, como lo será el material de fabricación de sus componentes o el grado de protección frente a la humedad. Un Bloque central (1) da soporte al sistema. En su parte superior cuenta con un agujero circular que permite el paso del sistema de anclaje con el USV (11) . En su parte media sirve de soporte de los pistones (3) que van unidos a las barras pasantes (6) que dan soporte y dotan de movimiento a las pinzas (2) . Finalmente, en las caras anterior y posterior de su parte inferior alberga cuatro agujeros pasantes, dos destinados a ubicar las barras (9) que lo atraviesan y le dan consistencia y dos destinados a ubicar los ejes de giro (5) de las pinzas (2.a y 2.b) , mientras que en las caras laterales de su parte inferior presenta huecos para que la parte superior de las dos pinzas (2.a) se puedan introducir en su interior al girar solidarias a los ejes (5) que discurren por su interior. El sistema cuenta con cuatro pinzas, dos de ellas engranadas por su parte superior (2.a) y otras dos no engranadas (2.b) . Estas pinzas poseen forma geométrica de lúnula con objeto de que al cerrarse generen un espacio hueco circular que permita sujetar n AUV y su parte inferior presenta forma de uña abierta 25° con respecto al interior de la pinza, que permitirá mejorar la maniobra de recogida del AUV desde el USV y sujetar AUV con un diámetro de hasta el 38% superior al del AUV concebido para ser sujetado con las pinzas cerradas. El tamaño de las pinzas dependerá del diámetro del cilindro que conforma el cuerpo de los USV. Cada una de estas pinzas están dotadas de seis agujeros pasantes (tres en cada garra) : - El agujero superior de cada garra permite el paso de un eje de rotación de las pinzas (5) que atraviesa el bloque (1) . - El agujero intermedio permite el paso de una barra (6) solidaria con los pistones (3) que abren y cierran las pinzas. - El agujero inferior permite el paso de una barra (7) que le confiere consistencia al conjunto de pinzas. Cada una de estas garras se encuentran soldadas, en los puntos por los que son atravesadas, a los ejes de giro (5) a las barras pasantes (6) y a las barras pasantes (7) . Las pinzas engrandadas (2.a) , se encuentran en el interior del bloque (1) , dos a cada lado del bloque, y engranan con la simétrica del otro lado del bloque. Estas pinzas junto con las no engranadas (2.b) están soldadas a los ejes de rotación (5) , que atraviesan el bloque (1) desde la parte delantera a la trasera hasta acabar en sus extremos en dos topes (8) , que obtienen su consistencia gracias a dos varillas soldadas (9) que atraviesan el bloque. Dos pistones laterales (3) , uno a cada lado del bloque central (1) , que unidos por uno de sus extremos a este mediante lengüetas soldadas (4) , por su extremo distal presentan un agujero pasante, a través del cual discurrirán las barras pasantes (6) . La apertura/cierre de las pinzas se produce mediante la acción de cierre/apertura de los pistones, que son controlados por un grupo electrohidráulico equipado con una bomba de pistones de caudal variable autorregulada y se instala a bordo del USV. El cierre de las pinzas (2.a y 2.b) se produce mediante la elongación de los pistones laterales (3) , mientras que la apertura de las pinzas (2.a y 2.b) se produce mediante la ontracción de los pistones laterales (3) . Cuando los dos pistones (3) se cierran, actúan sobre las barras pasantes (6) que atraviesa las pinzas, cuatro a cada lado del bloque central (1) , mientras, los ejes de rotación (5) giran a demanda. Los pistones serán comerciales y se adecuarán a las dimensiones y pesos del AUV a soportar. De igual modo puede variar el material de fabricación en función del grado de protección a la humedad del que se le quiera dotar. La unión de los pistones laterales (3) al cuerpo central (1) se realiza mediante lengüetas de unión (4) Dos barras solidarias con los pistones laterales (6) , transcurren por el interior del agujero de la parte distal del pistón cuya función es, además de dar soporte a las pinzas (2.a y 2.b) , dotarlas del movimiento necesario para sujetar o liberar la sujeción del AUV. El sistema cuenta además con otras dos barras para dar consistencia al conjunto de pinzas (7) y dos ejes de giro de las pinzas (5) , que atraviesan el bloque central (1) desde su parte frontal a la trasera, uno a cada lado, y que acaban en cada extremo atravesando el tope (8) sobre el que giran libres. En los extremos delantero y trasero del bloque central (1) se encuentran dos topes (8) que permiten el movimiento de los ejes de giro de las pinzas, y que se encuentran unidos entre sí por dos barras soldadas (9) que atraviesan el bloque y que le dan consistencia. Un pistón superior (10) , que se encuentra, como su propio nombre indica, situado en la parte superior del bloque (1) , va unido solidariamente a la tapa superior del sistema de anclaje con el USV (11) . La subida del sistema desde el USV, una vez se ha desplegado el AUV, se produce mediante la contracción del pistón superior (10) , mientras que la bajada del sistema desde el USV, para recuperar y dar soporte al AUV, se produce mediante la elongación del pistón superior (10) . Un sistema de anclaje con el USV (11) , compuesto por un cilindro y una tapa superior de forma circular, va unido de manera solidaria el pistón superior (19) . Por último, una barra de sujeción (12) va unida a la parte inferior del pistón superior (19) y soldada a las caras internas de los laterales del bloque (1) . Cuando el sistema se encuentra sujetando el AUV entre sus pinzas, los pistones laterales solidarios con las pinzas (3) permanecen en su máxima extensión manteniendo las pinzas cerradas y el pistón superior (10) permanece en su máxima extensión, lo que asegura que el AUV esté completamente sumergido. Cuando el sistema se encuentra durante la maniobra de lanzado los pistones laterales solidarios con las pinzas (3) se cierran, dando lugar a la apertura de las pinzas y a la liberación del AUV y el pistón superior (10) permanece en su máxima extensión, lo que asegura que la maniobra no ponga en riesgo al AUV, que está completamente sumergido. Para subir el sistema hacia el USV, el pistón superior (10) se cierra, levantando la invención hasta una altura que permite que el AUV inicie sus propias maniobras sin riesgo y los pistones laterales solidarios con las pinzas (3) permanecen en su posición de menor extensión, lo que evita que las pinzas se cierren. Durante la maniobra de recuperación del AUV, con el USV sobre el AUV, el pistón superior (10) se abre al máximo, introduciendo el sistema en el agua, a una distancia que permite recoger el USV y los pistones solidarios con las pinzas (3) se abren hasta su máxima extensión, cerrando las pinzas sobre el cuerpo del AUV. La configuración del sistema objeto de la invención permite realizar las siguientes maniobras: a. fijar temporalmente un AUV (b) a la estructura de un USV (a) , permitiendo que todo el cuerpo del AUV (b) permanezca sumergido en todo momento, b. portar el AUV (b) dentro de la masa de agua mientras el USV (a) se desplaza sobre la misma con sus propios medios de propulsión, a rumbo GPS programado y apoyado por las redes de satélites (c) o de forma controlada desde una estación de control situada en tierra o a bordo de un barco de apoyo (d) , c. tomar datos del medio marino a través de los sensores del USV (a) mientras que el AUV (b) se encuentra soportado por este, sin entorpecer con el cuerpo del AUV (b) la recepción de datos o las maniobras necesarias a para la toma de los mismos, y hasta una profundidad (h1) determinada por las capacidades de estos sensores, d. tomar datos del medio marino a través de los sensores del AUV (b) , mientras este se encuentra fijo al USV (a) , sin que la presencia del USV (b) que lo porta entorpezca la recepción de datos, y hasta una profundidad (h2) determinada por las capacidades de estos sensores, e. lanzar en un punto predeterminado el AUV (b) que se encuentra fijado al USV (a) sin poner en riesgo la integridad de ninguno de los vehículos, ni las maniobras de navegación del AUV (b) una vez liberado, para que pueda bajar hasta la profundidad que determine su capacidad (h3) y trabaje de forma autónoma, f. recoger el AUV (b) cuando este haya finalizado su misión y se encuentre en superficie, para volver a fijarlo al USV (a) sin poner en riesgo la integridad de ninguno de los vehículos, ni las maniobras de navegación del USV (a) una vez que se haya fijado en AUV (b) . Como se ha indicado anteriormente en la descripción del grupo electrohidráulico y la bomba, así como en el caso de los pistones, los materiales del resto de componentes del sistema pueden variar en función del grado de protección a la humedad del que se quiera dotar. Con carácter ilustrativo y no limitativo, se indica que, en una realización del sistema: - Las pinzas (2.a y 2.b) , las piezas que conforman la caja del bloque central (1) , el sistema de anclaje (11) y los topes (8) se han construido a partir de plancha de aluminio naval Al-Mg AA5083, con un tratamiento de anodizado duro, lo que mejora sus propiedades frente a la corrosión y el desgaste. - Las barras (5) , (6) , (7) y (9) se han fabricado en acero inoxidable calidad AISI 316L. - La tornillería empleada ha sido de acero inoxidable calidad AISI 316L aisladas con teflón para evitar el contacto eléctrico con el aluminio.
Publicaciones:
ES2955225 (29/11/2023) - A1 Solicitud de patente con informe sobre el estado de la técnica
ES2955225 (05/04/2024) - B2 Patente de invención con examen
Eventos:
En fecha 21/04/2022 se realizó Registro Instancia de Solicitud
En fecha 22/04/2022 se realizó Admisión a Trámite
En fecha 22/04/2022 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 23/05/2022 se realizó Superado examen de oficio
En fecha 02/08/2022 se realizó Realizado IET
En fecha 05/08/2022 se realizó 1109P_Comunicación Traslado del IET
En fecha 19/09/2022 se realizó PETEX_Petición de examen sustantivo
En fecha 29/11/2023 se realizó Publicación Solicitud
En fecha 29/11/2023 se realizó Publicación Folleto Solicitud con IET (A1)
En fecha 15/03/2024 se realizó Validación petición y/o pago de examen sustantivo conforme
En fecha 19/03/2024 se realizó No existen objeciones a la concesión de la solicitud
En fecha 19/03/2024 se realizó Finalización de Examen Sustantivo
En fecha 19/03/2024 se realizó 6121P_Comunicación finalización de examen sustantivo
En fecha 25/03/2024 se realizó Publicación finalización de examen sustantivo
En fecha 27/03/2024 se realizó Concesión con examen sustantivo
En fecha 27/03/2024 se realizó Entrega título
En fecha 27/03/2024 se realizó 6125P_Notificación de concesión con examen sustantivo
En fecha 05/04/2024 se realizó Publicación concesión Patente
En fecha 05/04/2024 se realizó Publicación Folleto Concesión
Pagos:
21/04/2022 - Pago Tasas IET
+ ES-2955225_B21. Sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) con casco de catamarán, caracterizado por que está dotado de un sistema de anclaje (11) para su unión a la parte inferior del USV y de una serie de pinzas de costilla para la sujeción del AUV, que lo sitúan en todo momento por debajo de la línea de flotación del USV y lo convierten en un casco adicional, dotando al conjunto de una configuración a modo de trimarán con casco triple híbrido (SWASSH) y eliminando la necesidad de emplear sistemas de cabestrantes para arriado e izado del AUV al USV para su transporte, y por que el movimiento para la sujeción y liberación del AUV se consigue mediante grupo electrohidráulico equipado con una bomba de pistones de caudal variable autorregulada instalada a bordo del USV, mediante la cual se acciona: a) un pistón (10) situado en la parte superior del sistema que permite elevar el sistema desde el USV una vez que el AUV se ha desplegado, o bajarlo cuando el AUV deba ser recuperado. b) dos pistones (3) situados en los laterales del sistema que mediante la acción de cierre/apertura permiten el movimiento de las pinzas de costillas (2.a y 2.b) que sirven de sujeción al AUV. 2. Sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , según reivindicación 1, que comprende: - Un grupo electrohidráulico equipado con una bomba de pistones de caudal variable autorregulada que se instala a bordo del USV. - Un bloque central (1) , que da soporte al sistema, el cual en su parte superior cuenta con un agujero circular que permite el paso del sistema de anclaje con el USV (11) , en su parte media sirve de soporte de los pistones (3) que van unidos a las barras pasantes (6) que dan soporte y dotan de movimiento a las pinzas (2) , y en las caras anterior y posterior de su parte inferior alberga cuatro agujeros pasantes, dos destinados a ubicar las barras (9) que lo atraviesan y le dan consistencia y dos destinados a ubicar los ejes de giro (5) de las pinzas (2.a y 2.b) , mientras que en las caras laterales de su parte inferior presenta huecos para que la parte superior de las dos pinzas (2.a) se puedan introducir en su interior al girar solidarias a los ejes (5) que discurren por su interior. - Cuatro pinzas, dos de ellas engranadas por su parte superior (2.a) y otras dos no engranadas (2.b) , todas ellas con forma geométrica de lúnula con objeto de que al cerrarse generen un espacio hueco circular que permita sujetar un AUV y finalizadas por su parte inferior en forma de uña abierta 25° con respecto al interior de la pinza, cada una de las cuales están dotadas de 6 agujeros pasantes (tres en cada garra) : - El agujero superior de cada garra permite el paso de un eje de rotación de las pinzas (5) que atraviesa el bloque (1) . - El agujero intermedio permite el paso de una barra (6) solidaria con los pistones (3) que abren y cierran las pinzas. - El agujero inferior permite el paso de una barra (7) que le confiere consistencia al conjunto de pinzas. - Dos pistones laterales (3) , uno a cada lado del bloque central (1) , que unidos por uno de sus extremos a este mediante lengüetas soldadas (4) , por su extremo distal presentan un agujero pasante, a través del cual discurrirán las barras pasantes (6) . - Lengüetas de unión (4) de los pistones laterales (3) al cuerpo central (1) . - Dos barras solidarias con los pistones laterales (6) , que transcurren por el interior del agujero de la parte distal del pistón cuya función es, además de dar soporte a las pinzas (2.a y 2.b) , dotarlas del movimiento necesario para sujetar o liberar la sujeción del AUV. - Dos barras para dar consistencia al conjunto de pinzas (7) . - Dos ejes de giro de las pinzas (5) , que atraviesan el bloque central (1) desde su parte frontal a la trasera, uno a cada lado y que acaban en cada extremo atravesando el tope (8) sobre el que giran libres. - Dos topes (8) situados en los extremos delantero y trasero del bloque central (1) , que permiten el movimiento de los ejes de giro de las pinzas, y que se encuentran unidos entre sí por dos barras soldadas (9) que atraviesan el bloque y que le dan consistencia. - Dos barras soldadas (9) , que atraviesan el bloque (1) y le dan consistencia. - Pistón superior (10) , que se encuentra situado en la parte superior del bloque (1) y va unido solidariamente a la tapa superior del sistema de anclaje con el USV (11) . - Sistema de anclaje con el USV (11) , compuesto por un cilindro y una tapa superior de forma circular, a la que va unido de manera solidaria el pistón superior (19) . - Una barra de sujeción (12) que va unida a la parte inferior del pistón superior (19) y soldada a las caras internas de los laterales del bloque (1) . 3. Sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , según reivindicación 2, caracterizado porque las garras se encuentran soldadas a los ejes de giro (5) , que las traspasan a través de sus agujeros pasantes superiores. 4. Sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , según reivindicación 2, caracterizado por que las garras se encuentran soldadas a las barras pasantes (6) , que las traspasan a través de sus agujeros pasantes intermedios. 5. Sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , según reivindicación 2, caracterizado por que las garras se encuentran soldadas a las barras pasantes (7) , que las traspasan a través de sus agujeros pasantes inferiores. 6. Sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , según reivindicación 2, caracterizado por que el cierre de las pinzas (2.a y 2.b) se produce mediante la elongación de los pistones laterales (3) . 7. Sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , según reivindicación 2, caracterizado por que la apertura de las pinzas (2.a y 2.b) se produce mediante la contracción de los pistones laterales (3) . 8. Sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , según reivindicación 2, caracterizado por que la subida del sistema desde el USV una vez se ha desplegado el AUV se produce mediante la contracción del pistón superior (10) . 9. Sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , según reivindicación 2, caracterizado por que la bajada del sistema desde el USV para ecuperar y dar soporte al AUV se produce mediante la elongación del pistón superior (10) . 10. Sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , según reivindicaciones anteriores, caracterizado por que cuando el sistema se encuentra sujetando el AUV entre sus pinzas, los pistones laterales solidarios con las pinzas (3) permanecen en su máxima extensión manteniendo las pinzas cerradas y el pistón superior (10) permanece en su máxima extensión, lo que asegura que el AUV esté completamente sumergido. 11. Sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , según reivindicaciones anteriores, caracterizado por que cuando el sistema se encuentra durante la maniobra de lanzado los pistones laterales solidarios con las pinzas (3) se cierran, dando lugar a la apertura de las pinzas y a la liberación del AUV y el pistón superior (10) permanece en su máxima extensión, lo que asegura que la maniobra no ponga en riesgo al AUV, que está completamente sumergido. 12. Sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , según reivindicaciones anteriores, caracterizado por que para subir el sistema hacia el USV, el pistón superior (10) se cierra, levantando la invención hasta una altura que permite que el AUV inicie sus propias maniobras sin riesgo y los pistones laterales solidarios con las pinzas (3) permanecen en su posición de menor extensión, lo que evita que las pinzas se cierren. 13. Sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , según reivindicaciones anteriores, caracterizado por que durante la maniobra de recuperación del AUV, con el USV sobre el AUV, el pistón superior (10) se abre al máximo, introduciendo el sistema en el agua, a una distancia que permite recoger el USV y los pistones solidarios con las pinzas (3) se abren hasta su máxima extensión, cerrando las pinzas sobre el cuerpo del AUV. 14. Procedimiento de uso del sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) con casco de catamarán, según reivindicaciones anteriores, que comprende las siguientes etapas: a. fijar temporalmente un AUV (b) a la estructura de un USV (a) , permitiendo que todo el cuerpo del AUV (b) permanezca sumergido en todo momento, b. portar el AUV (b) dentro de la masa de agua mientras el USV (a) se desplaza sobre la misma con sus propios medios de propulsión, a rumbo GPS programado y apoyado por las redes de satélites (c) o de forma controlada desde una estación de control situada en tierra o a bordo de un barco de apoyo (d) , c. permitir que, mientras el AUV (b) se encuentra fijo al USV (a) , el USV (a) pueda tomar datos del medio marino con sus propios sensores, sin entorpecer con el cuerpo del AUV (b) la recepción de datos o las maniobras necesarias a para la toma de los mismos, y hasta una profundidad (h1) determinada por las capacidades de estos sensores, d. permitir que, mientras el AUV (b) se encuentra fijo al USV (a) , el AUV (b) pueda tomar datos del medio marino con sus propios sensores, sin que la presencia del USV (b) que lo porta entorpezca la recepción de datos, y hasta una profundidad (h2) determinada por las capacidades de estos sensores, e. lanzar en un punto predeterminado el AUV (b) que se encuentra fijado al USV (a) sin poner en riesgo la integridad de ninguno de los vehículos, ni las maniobras de navegación del AUV (b) una vez liberado, para que pueda bajar hasta la profundidad que determine su capacidad (h3) y trabaje de forma autónoma, f. recoger el AUV (b) cuando este haya finalizado su misión y se encuentre en superficie, para volver a fijarlo al USV (a) sin poner en riesgo la integridad de ninguno de los vehículos, ni las maniobras de navegación del USV (a) una vez que se haya fijado en AUV (b) .
+ ES-2955225_A11. Sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) con casco de catamarán, caracterizado por que está dotado de un sistema de anclaje (11) para su unión a la parte inferior del USV y de una serie de pinzas de costilla para la sujeción del AUV, que lo sitúan en todo momento por debajo de la línea de flotación del USV y lo convierten en un casco adicional, dotando al conjunto de una configuración a modo de trimarán con casco triple híbrido (SWASSH) y eliminando la necesidad de emplear sistemas de cabestrantes para arriado e izado del AUV al USV para su transporte, y por que el movimiento para la sujeción y liberación del AUV se consigue mediante grupo electrohidráulico equipado con una bomba de pistones de caudal variable autorregulada instalada a bordo del USV, mediante la cual se acciona: a) un pistón (10) situado en la parte superior del sistema que permite elevar el sistema desde el USV una vez que el AUV se ha desplegado, o bajarlo cuando el AUV deba ser recuperado. b) dos pistones (3) situados en los laterales del sistema que mediante la acción de cierre/apertura permiten el movimiento de las pinzas de costillas (2.a y 2.b) que sirven de sujeción al AUV. 2. Sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , según reivindicación 1, que comprende: - Un grupo electrohidráulico equipado con una bomba de pistones de caudal variable autorregulada que se instala a bordo del USV. - Un bloque central (1) , que da soporte al sistema, el cual en su parte superior cuenta con un agujero circular que permite el paso del sistema de anclaje con el USV (11) , en su parte media sirve de soporte de los pistones (3) que van unidos a las barras pasantes (6) que dan soporte y dotan de movimiento a las pinzas (2) , y en las caras anterior y posterior de su parte inferior alberga cuatro agujeros pasantes, dos destinados a ubicar las barras (9) que lo atraviesan y le dan consistencia y dos destinados a ubicar los ejes de giro (5) de las pinzas (2.a y 2.b) , mientras que en las caras laterales de su parte inferior presenta huecos para que la parte superior de las dos pinzas (2.a) se puedan introducir en su interior al girar solidarias a los ejes (5) que discurren por su interior. - Cuatro pinzas, dos de ellas engranadas por su parte superior (2.a) y otras dos no engranadas (2.b) , todas ellas con forma geométrica de lúnula con objeto de que al cerrarse generen un espacio hueco circular que permita sujetar un AUV y finalizadas por su parte inferior en forma de uña abierta 25° con respecto al interior de la pinza, cada una de las cuales están dotadas de 6 agujeros pasantes (tres en cada garra) : - El agujero superior de cada garra permite el paso de un eje de rotación de las pinzas (5) que atraviesa el bloque (1) . - El agujero intermedio permite el paso de una barra (6) solidaria con los pistones (3) que abren y cierran las pinzas. - El agujero inferior permite el paso de una barra (7) que le confiere consistencia al conjunto de pinzas. - Dos pistones laterales (3) , uno a cada lado del bloque central (1) , que unidos por uno de sus extremos a este mediante lengüetas soldadas (4) , por su extremo distal presentan un agujero pasante, a través del cual discurrirán las barras pasantes (6) . - Lengüetas de unión (4) de los pistones laterales (3) al cuerpo central (1) . - Dos barras solidarias con los pistones laterales (6) , que transcurren por el interior del agujero de la parte distal del pistón cuya función es, además de dar soporte a las pinzas (2.a y 2.b) , dotarlas del movimiento necesario para sujetar o liberar la sujeción del AUV. - Dos barras para dar consistencia al conjunto de pinzas (7) . - Dos ejes de giro de las pinzas (5) , que atraviesan el bloque central (1) desde su parte frontal a la trasera, uno a cada lado y que acaban en cada extremo atravesando el tope (8) sobre el que giran libres. - Dos topes (8) situados en los extremos delantero y trasero del bloque central (1) , que permiten el movimiento de los ejes de giro de las pinzas, y que se encuentran unidos entre sí por dos barras soldadas (9) que atraviesan el bloque y que le dan consistencia. - Dos barras soldadas (9) , que atraviesan el bloque (1) y le dan consistencia. - Pistón superior (10) , que se encuentra situado en la parte superior del bloque (1) y va unido solidariamente a la tapa superior del sistema de anclaje con el USV (11) . - Sistema de anclaje con el USV (11) , compuesto por un cilindro y una tapa superior de forma circular, a la que va unido de manera solidaria el pistón superior (19) . - Una barra de sujeción (12) que va unida a la parte inferior del pistón superior (19) y soldada a las caras internas de los laterales del bloque (1) . 3. Sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , según reivindicación 2, caracterizado porque las garras se encuentran soldadas a los ejes de giro (5) , que las traspasan a través de sus agujeros pasantes superiores. 4. Sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , según reivindicación 2, caracterizado por que las garras se encuentran soldadas a las barras pasantes (6) , que las traspasan a través de sus agujeros pasantes intermedios. 5. Sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , según reivindicación 2, caracterizado por que las garras se encuentran soldadas a las barras pasantes (7) , que las traspasan a través de sus agujeros pasantes inferiores. 6. Sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , según reivindicación 2, caracterizado por que el cierre de las pinzas (2.a y 2.b) se produce mediante la elongación de los pistones laterales (3) . 7. Sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , según reivindicación 2, caracterizado por que la apertura de las pinzas (2.a y 2.b) se produce mediante la contracción de los pistones laterales (3) . 8. Sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , según reivindicación 2, caracterizado por que la subida del sistema desde el USV una vez se ha desplegado el AUV se produce mediante la contracción del pistón superior (10) . 9. Sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , según reivindicación 2, caracterizado por que la bajada del sistema desde el USV para ecuperar y dar soporte al AUV se produce mediante la elongación del pistón superior (10) . 10. Sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , según reivindicaciones anteriores, caracterizado por que cuando el sistema se encuentra sujetando el AUV entre sus pinzas, los pistones laterales solidarios con las pinzas (3) permanecen en su máxima extensión manteniendo las pinzas cerradas y el pistón superior (10) permanece en su máxima extensión, lo que asegura que el AUV esté completamente sumergido. 11. Sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , según reivindicaciones anteriores, caracterizado por que cuando el sistema se encuentra durante la maniobra de lanzado los pistones laterales solidarios con las pinzas (3) se cierran, dando lugar a la apertura de las pinzas y a la liberación del AUV y el pistón superior (10) permanece en su máxima extensión, lo que asegura que la maniobra no ponga en riesgo al AUV, que está completamente sumergido. 12. Sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , según reivindicaciones anteriores, caracterizado por que para subir el sistema hacia el USV, el pistón superior (10) se cierra, levantando la invención hasta una altura que permite que el AUV inicie sus propias maniobras sin riesgo y los pistones laterales solidarios con las pinzas (3) permanecen en su posición de menor extensión, lo que evita que las pinzas se cierren. 13. Sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , según reivindicaciones anteriores, caracterizado por que durante la maniobra de recuperación del AUV, con el USV sobre el AUV, el pistón superior (10) se abre al máximo, introduciendo el sistema en el agua, a una distancia que permite recoger el USV y los pistones solidarios con las pinzas (3) se abren hasta su máxima extensión, cerrando las pinzas sobre el cuerpo del AUV. 14. Procedimiento de uso del sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) con casco de catamarán, según reivindicaciones anteriores, que comprende las siguientes etapas: a. fijar temporalmente un AUV (b) a la estructura de un USV (a) , permitiendo que todo el cuerpo del AUV (b) permanezca sumergido en todo momento, b. portar el AUV (b) dentro de la masa de agua mientras el USV (a) se desplaza sobre la misma con sus propios medios de propulsión, a rumbo GPS programado y apoyado por las redes de satélites (c) o de forma controlada desde una estación de control situada en tierra o a bordo de un barco de apoyo (d) , c. permitir que, mientras el AUV (b) se encuentra fijo al USV (a) , el USV (a) pueda tomar datos del medio marino con sus propios sensores, sin entorpecer con el cuerpo del AUV (b) la recepción de datos o las maniobras necesarias a para la toma de los mismos, y hasta una profundidad (h1) determinada por las capacidades de estos sensores, d. permitir que, mientras el AUV (b) se encuentra fijo al USV (a) , el AUV (b) pueda tomar datos del medio marino con sus propios sensores, sin que la presencia del USV (b) que lo porta entorpezca la recepción de datos, y hasta una profundidad (h2) determinada por las capacidades de estos sensores, e. lanzar en un punto predeterminado el AUV (b) que se encuentra fijado al USV (a) sin poner en riesgo la integridad de ninguno de los vehículos, ni las maniobras de navegación del AUV (b) una vez liberado, para que pueda bajar hasta la profundidad que determine su capacidad (h3) y trabaje de forma autónoma, f. recoger el AUV (b) cuando este haya finalizado su misión y se encuentre en superficie, para volver a fijarlo al USV (a) sin poner en riesgo la integridad de ninguno de los vehículos, ni las maniobras de navegación del USV (a) una vez que se haya fijado en AUV (b) .
Los productos y servicios protegidos por este registro son:
B63B 35/40
Descripciones:
+ ES-2955225_B2 SISTEMA RÍGIDO DE LANZAMIENTO Y RECUPERACIÓN DE UN VEHÍCULO AUTÓNOMO SUBMARINO DESDE UN VEHÍCULO AUTÓNOMO MARINO DE SUPERFICIE SECTOR DE LA TÉCNICA Tecnología marina aplicada a vehículos autónomos marinos. ANTECEDENTES DE LA INVENCIÓN La Universidad de Cádiz dispone de un conjunto de vehículos no tripulados, marinos y aéreos que, frente a los clásicos barcos oceanográficos, sumergibles o aeronaves, le permiten llevar a cabo diversas misiones científicas a un menor coste, más largas y comprometidas, con mayor seguridad para el personal que los opera, y con capacidad de un despliegue más rápido en zonas de difícil acceso o vetadas para otros vehículos tripulados. En este documento se hace referencia al uso de dos tipos de vehículos autónomos: - Por un lado, se hace referencia al uso de la invención propuesta en un vehículo autónomo marino de superficie (conocido por sus siglas en ingles USV, Unmanned Surface Vehicle o ASC, Autonomous Surface Craft) . Su configuración es similar a la de un barco tradicional, pero puede ser operados de forma totalmente autónoma, mediante la programación previa de una ruta, o de forma semiautónoma, con el control ejercido desde una estación de control en tierra o a bordo de otra embarcación. Dado que opera sobre la superficie de mares o lagos, su localización es precisa, la comunicación vehículo-operador es inmediata y la transmisión de datos a tiempo real es inmediata. - Por otro lado, también se hace referencia al uso de la invención propuesta en un vehículo autónomo submarino (AUV, del inglés de Autonomous Underwater Vehicle) , que posee una arquitectura de control que le permite realizar misiones bajo el agua sin la supervisión de un operador, con las misiones y navegación previamente programadas. A diferencia del USV, su control en tiempo real por un operador, la transmisión de datos, la localización en la que se encuentra o el rumbo que sigue en ada momento, son cuestiones mucho más limitadas dado que opera en la columna de agua donde no acceden las señales GPS, WiFi, etc. La comunicación y control absoluto sobre el AUV solo se recupera cuando el vehículo asciende a la superficie. Las diferencias expuestas entre ambos vehículos condicionan también el tipo de misión que realiza uno u otro, pero también en grado de autonomía y las dimensiones con las que se pueden construir. Así existen USV de poco más de 1 m de eslora, con pesos inferiores a 40 Kg y autonomías de un máximo de 6 horas (e.g. https://www.oceanalpha.com/product-item/sl20/) , hasta otros con las dimensiones de un gran navío tripulado (hasta 91 m de eslora y 2000 Tn de desplazamiento) y autonomía de meses y capacidad para navegar hasta 6.500 Km (e.g. https://sgp.fas.org/crs/weapons/R45757.pdf) . Sin embargo, los AUV presentan dimensiones menores, menor capacidad de carga y una autonomía más limitada. En el mercado hay UAV desde algo menos de 1 m de eslora, menos de 30 Kg de peso y autonomía máxima de 4 horas (e.g. https://www.lockheedmartin.com/enus/products/a-size-autonomous-underwater-vehicles.html) hasta vehículos de 7 m de eslora, 1.5 Tn, y 74 horas de autonomía (e.g. https://www.kongsberg.com/maritime/products/marine-robotics/autonomousunderwater-vehicles/AUV-hugin/#downloads) . Las diferentes características de un USV y un AUV determinan las aplicaciones para los que uno u otro son más adecuados. Sin embargo, los dos vehículos trabajando de forma coordinada, permiten una complementariedad que multiplica las capacidades de cada sistema por separado. Algunos ejemplos de aplicaciones que se benefician de esta colaboración son la prospección de recursos vivos y energéticos marinos, la vigilancia en aguas remotas desconocidas, las contramedidas frente a minas y la seguridad portuaria. En estas misiones, un AUV por sí solo puede no ser suficiente, ya carece de la capacidad de recorrer largas distancias a gran velocidad y, como se ha indicado, no puede comunicarse con un barco de superficie o con la costa sin salir a la superficie. Un USV, sin embargo, puede tener mayores dimensiones, capacidad de carga y autonomía, y se puede convertir en una buena plataforma móvil de lanzamiento y recuperación (LARS, del inglés de Launch and Recover y System) ya que puede realizar una navegación autónoma en un entorno marino desconocido (e.g. https://www.sea-kit.com/) . Además, el USV puede seguir operando como tal haciendo uso de sus propios sistemas de toma de datos. La configuración del caso de los USV suele ser o tipo monocasco, o tipo catamarán. En este tipo de sistemas colaborativos entre un USV y un AUV, el diseño del sistema LARS es vital, sobre todo cuando el control humano debe limitarse si se pretenden preservar los grados de autonomía que aportan ambos vehículos. El lanzamiento y la recuperación de una AUV es una de las operaciones de mayor riesgo que se realizan en estas operaciones. La función principal de un sistema autónomo de lanzamiento y recuperación es permitir que el AUV y sus cargas útiles se lleven a bordo del vehículo anfitrión, bien a un buque convencional bien a un USV, de manera segura, eficiente y sin daños. Los mecanismos de lanzamiento y recuperación de vehículos submarinos autónomos pueden ser de muchos tipos. En la literatura y en el mercado existen diferentes tipos de LARS. Los más sencillos se basan en redes de transporte y captura y cabos con mecanismos de suelta y enganche que son accionados manual o mecánicamente al vehículo anfitrión. Existen mecanismos rígidos, desde grúas, rampas de lanzado que forman parte del casco del vehículo anfitrión y que requiere de la acomodación del AUV en la bañera o en la bodega del vehículo anfitrión (e.g. https://www.sea-kit.com/) , brazos articulados que despliegan o recuperan al AUV acomodado en la cubierta del vehículo anfitrión por su popa (https://krakenrobotics.com/products/launch-recover y /) , o sistemas mixtos que emplean brazos articulados que despliegan una rampa de izado o arriado del AUV (e.g. https://www.hydro-international.com/content/news/this-is-howan-unmanned-launch-and-recover y -system-operates) . En todos estos casos es necesario el apoyo de un cabestrante eléctrico que eleva el peso de USV, restando su carta de pago. Estos cabestrantes, además, deben ser alimentados por baterías adicionales a las que incorpora el propio vehículo para su navegación. Estos mecanismos pueden ser de diferentes tamaños, adaptados no solo al tamaño del vehículo submarino autónomo a desplegar, sino también a las dimensiones, capacidades y características de la plataforma desde la que se despliega (un barco tripulado, un vehículo autónomo de superficie, una plataforma off-shore, el veril de un puerto, etc.) . En el caso concreto de los mecanismos rígidos, suelen conllevar pesos, dimensiones y requerimientos energéticos elevados, que impide su empleo en USV de pequeña eslora. En la actualidad se está trabajando en el desarrollo de LARS para USV de pequeña eslora. En algunos trabajos (e.g. https://ieeexplore.ieee.org/document/8469058) se ha esarrollado un sistema automatizado de lanzamiento y recuperación que permite transporta un AUV de 1, 6 m de eslora y 38, 5 Kg de peso a bordo de un USV de 4.05 m de eslora y 180 Kg de peso. En este diseño se monta una línea flexible en el USV para proporcionar un cable de conexión al AUV durante el lanzamiento y la recuperación. Esta línea puede extenderse hacia el agua durante la recuperación del AUV o permanecer retraída a bordo del USV. Para mantener la línea tensa bajo el agua se utiliza un hidrodeslizador con un peso en el extremo de la línea. Como en los casos anteriores se necesita un cabrestante para permitir que el conjunto de la línea se mueva dentro y fuera del agua. Un segundo cabrestante se utiliza para mover la estructura del carro dentro y fuera de la superficie del agua, para desplegar el AUV durante el lanzamiento y para izarlo a bordo del USV durante la recuperación. En otros trabajos (e.g. https://www.mdpi.com/1424-8220/20/9/2633/htm) el AUV permanece unido en todo momento al USV a través de un cable que se une a un cabestrante. Este sistema suministra energía continuamente al AUV y evita su pérdida, dado que en todo momento puede ser recuperado por el USV. Pero este mismo cable limita la capacidad de movimiento y la distancia a recorrer del AUV frente a las coordenadas en las que se encuentra el USV. En general, de estos mecanismos, los rígidos cumplen con el requisito de sujetar al AUV de una forma precisa y segura durante su transporte, lanzado y recuperación. Esto no ocurre con otros mecanismos como las redes o los cabos de sujeción, que no son rígidos y que son insuficientes para muchas aplicaciones. En los sistemas rígidos se deben cumplir al menos dos requisitos: que dispongan de algún medio para disipar la energía cinética el vehículo cuando impacta con el agua en las maniobras de arriado e izado, y que permitan que el vehículo se aleje del mecanismo de sujeción por sus propios medios. El dispositivo objeto de la invención es un sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , que es independiente de los dos vehículos mencionados, el cual está diseñado para su uso desde cualquier USV con doble casco de catamarán, que se sujeta a la parte inferior del USV mediante un sistema rígido de anclaje, que no emplea un sistema de cabestrantes para arriado e izado del AUV, que mantiene en todo momento al AUV por debajo de la línea de flotación del USV permitiendo que los sensores instalados a bordo de UAV se encuentren siempre sumergidos incluso mientras se produce el desplazamiento del USV, convirtiendo al AUV en un casco dicional del USV que se transforma en un trimarán, en el que la sujeción del AUV se realiza mediante un sistema de pinzas, y en el que el movimiento de las pinzas y el de elevación propia del LARS por encima de la línea de flotación del USV para evitar la resistencia hidrodinámica en la navegación del USV una vez liberado el AUV se produce mediante un grupo electrohidráulico equipado con una bomba de pistones de caudal variable autorregulada que se instala a bordo del USV. Todos los sistemas, rígidos o no, que componen el estado de la técnica actual tienen en común que mantienen al AUV fuera del nivel del agua durante el transporte hasta el punto de lanzado, y que una vez que el AUV es recuperado, este vuelve a izarse sobre el nivel del agua en la plataforma que lo ha desplegado. Algunos de estos ejemplos los tenemos en documentos de patentes CN109178260A, CN111874167, CN110775200A, así como en las publicaciones "A USV-Based automated launch and recover y system for AUVs" Edoardo I Sarda et al.o "Design of an Unconventional ASV for Underwater Vehicles Recover y : Simulation of the motions for operations in rough seas", Brizzolara et al. Siendo identificados los documentos anteriores como los más cercanos al objeto de la invención, es importante tener en cuenta que en ninguno de ellos se contempla la posibilidad de que el AUV se mantenga en todo momento por debajo de la línea de flotación del USV, incluso mientras se produce el desplazamiento de este. Esta característica básica del dispositivo objeto de la invención propuesta permite que los sensores instalados a bordo de AUV se encuentren siempre sumergidos y en funcionamiento y convierten al AUV en un casco adicional del USV. El hecho de que el AUV se mantenga sumergido en todo momento, incluso durante el desplazamiento del USV, permiten desarrollar dos tipos de tareas: misiones propias de un USV, empleando tanto sus propios sensores, así como misiones en las que además se emplee la sensórica disponible en el AUV que viaja inmovilizado por el LARS. Por otra parte, el hecho de que el AUV se mantenga sumergido y actúe como un tercer casco, convirtiendo al USV en un trimarán con casco triple híbrido, denominado de tipo SWASSH (Small Waterplane Area Single Stabilised Hull) , compuesto por la unión de un USV con casco de catamarán y un AUV con forma de torpedo, aporta evidentes entajas en la navegabilidad del conjunto. Una primera ventaja es que el casco central sumergido formado por el AUV aumenta la estabilidad en el sentido de navegación longitudinal, y los cascos laterales del USV mejoran la estabilidad transversal. Pero adicionalmente, este casco híbrido formado por la unión del USV y el AUV disminuye el área mojada del doble casco del USV, necesita menos potencia del motor a velocidades moderadamente altas y disminuye la resistencia a la formación de olas. EXPLICACIÓN DE LA INVENCIÓN La invención es un dispositivo automático y rígido, para lanzar y recuperar (LARS) vehículos submarinos autónomos (AUV) desde un vehículo de superficie no tripulado (USV) con casco de catamarán, en un concepto absolutamente novedoso que se ha desarrollado en el seno del Proyecto KTTSeaDrones, cofinanciado por el Fondo Europeo de Desarrollo Regional FEDER a través del programa Interreg V-A España-Portugal (POCTEP) 2014-2020. El dispositivo es independiente de los dos vehículos mencionados y está dotado de un sistema de anclaje para su unión a la parte inferior del USV mediante un sistema rígido y de sistema hidráulico de pinza de costilla con capacidad para adaptarse a distintos diámetros para la sujeción del AUV que lo mantiene en todo momento por debajo de la línea de flotación del USV. Esta característica del confiere al sistema los siguientes efectos técnicos: a) Permite que los sensores instalados a bordo de UAV se encuentren siempre sumergidos y operativos. De esta forma, el USV podrá desarrollar dos tipos de tareas: 1) misiones propias de un USV, empleando tanto sus propios sensores como la sensórica disponible en el AUV, y 2) vehículo con elevada autonomía para el transporte del AUV hasta la zona de trabajo, en la que podrá lanzarlo y posteriormente recuperarlo. b) Permite que el AUV actúe como un tercer casco, convirtiendo al USV en un trimarán con casco triple híbrido, denominado de tipo SWASSH (Small Waterplane Area Single Stabilised Hull) , compuesto por la unión de un USV con casco de catamarán y un AUV con forma de torpedo, lo cual aporta evidentes ventajas en la navegabilidad del conjunto. El sistema hidráulico de pinza de costilla es capaz de adaptarse a distintos diámetros de UAV y está fabricado en aluminio naval anodizado para aligerar peso, soportar la carga, y mejorar las propiedades frente al desgaste por fricción en el AUV y la corrosión en agua de mar. El movimiento de las costillas de pinza es generado por dos ejes huecos, que corren opuestos y son accionados hidráulicamente por dos pistones laterales. Un tercer pistón superior permite elevar el sistema por encima de la línea de flotación del USV una vez que el AUV se ha desplegado para evitar la resistencia hidrodinámica en la navegación del USV y bajarlo cuando el AUV deba ser recuperado. El grupo electrohidráulico va equipado con una bomba de pistones de caudal variable autorregulada y se instala a bordo del USV. La disposición del AUV bajo la estructura del catamarán que conforma el USV reduce la necesidad del empleo de sistemas de cabestrantes para el arriado e izado de todo el sistema, disminuye la ocupación y los pesos a bordo de USV, mejora la estabilidad del USV catamarán al convertirlo en una embarcación trimarán, permite que los sensores del AUV actúen como sensores propios del ASV en aguas someras, y permite que el AUV sea transportado de forma autónoma y sin consumo energético hasta el punto de trabajo gracias a la mayor autonomía del USV que lo transporta. Entre las ventajas que derivan de la configuración del LARS objeto de la invención, derivadas de la unión del USV y AUV, adoptando una configuración de casco triple híbrido de tipo SWASSH, interesa mencionar: a) Permite su desplazamiento del conjunto a una velocidad mayor y menor consumo a la que podría desplazarse un USV con casco de catamarán. b) La elevación del dispositivo por encima de la línea de flotación del USV, una vez liberado el AUV, convierte al USV nuevamente en un catamarán, dotándolo de mayor maniobrabilidad. c) Permite que durante la navegación el AUV puede activar todos sus sensores, multiplicando las prestaciones del USV que lo transporta. Cada uno de estos vehículos dispone de un sistema de navegación independiente, que recibe la información de los sensores de posición, velocidad y aceleración del vehículo. En el caso de los AUV, estos sistemas de navegación funcionan correctamente cuando el vehículo se encuentra sumergido a una determinada profundidad, que por lo general debe de ser e un mínimo de tres metros para evitar los efectos de oleaje en superficie. Teniendo en cuenta la distancia mínima de navegación del AUV respecto al fondo marino, que no debe de ser nunca inferior a los 2 metros, estamos hablando de que un AUV puede empezar a realizar misiones en fondos de 5 metros de profundidad o más, pero nunca en fondos más someros. Esto deja fuera de su campo de acción las zonas marinas más cercanas a costa, en fondos de 0 a 5 metros de profundidad. Sin embargo, cuando el AUV se encuentra incorporado como tercer casco del USV en una configuración tipo SWASSH, es el sistema de navegación del USV el que coordina la navegación con el sistema de guiado y control del vehículo. La ventaja se produce debido a que el USV tiene poco calado, normalmente inferior a 40 cm. Eso permite que el AUV opere esclavo al USV en zonas de costa a partir de 50 cm a 1 m de profundidad, vetado para el AUV cuando este navega por sus propios medios. d) Mientras el AUV está siendo transportado por el USV, actúa como un tercer casco muy cerca de la superficie, permitiendo que su antena permanezca siempre fuera del agua, asegurando una comunicación Wi-fi continua entre el AUV y el USV que lo porta. Los AUV suelen disponer de una antena que permite comunicar el vehículo con la estación de control a través de Wi-fi. Durante esta comunicación, el operador del vehículo puede programar la misión que realizará el AUV o descargarse los datos que este ha recopilado. Pero esta comunicación requiere que el vehículo y el operador se encuentren muy cercanos. En el caso del AUV funcionando como tercer casco de la configuración tipo SWASSH, la antena permanece siempre fuera del agua, asegurando una comunicación Wi-fi continua entre el AUV y el USV que lo porta. La comunicación entre el operador y el AUV ya no se produce de forma directa, lo que limita la distancia a la que estos se pueden encontrar, sino a través de los sistemas de comunicación del USV incluyendo radio, que debido a su mayor carta de pago siempre son más robustos y fiables que los del AUV. BREVE DESCRIPCIÓN DE LOS DIBUJOS Para complementar la descripción que se está realizando y con objeto de ayudar a una mejor comprensión de las características de la invención, se acompaña como parte integrante de dicha descripción, un conjunto de dibujos en donde, con carácter ilustrativo y no limitativo, se ha representado lo siguiente: Figura 1.- Tanto la figura 1a como 1b muestra un esquema de los distintos modos de funcionamiento que permite el sistema objeto de la invención. Las referencias empleadas corresponden a: a. Vehículo autónomo de superficie (en adelante USV) . b. Vehículo autónomo submarino (en adelante AUV) . c. Redes de satélites. d. Estación de control. w. Masa de agua. h1. Profundidad a la que el USV puede tomar datos mediante sus propios sensores. h2. Profundidad a la que el AUV puede tomar datos mediante sus sensores, mientras se encuentra fijo al USV. h3. Profundidad a la que el AUV puede tomar datos mediante sus sensores, una vez ha sido liberado del USV. En estas figuras se contempla: A. Muestra el trabajo del USV transportando un AUV. En este apartado se esquematiza que, sobre una masa de agua (w) , oceánica o continental, navega un vehículo autónomo de superficie (a) con casco de catamarán que opera de forma autónoma seguido a una distancia y con una autonomía determinada por sus capacidades. Este vehículo puede tomar datos mediante sus sensores hasta una profundidad (h1) determinada por las capacidades de estos sensores, mientras porta un vehículo autónomo submarino (b) a modo de un tercer casco que convierte al catamarán en un trimarán. B. Muestra el AUV a modo cabeza sensórica, mientras va sujeto al USV. En este apartado se expresa que el USV (a) también puede transportar el AUV (b) mientras esta toma datos con sus propios sensores, hasta una profundidad (h2) determinada por las capacidades de estos sensores. Tanto en la etapa descrita en A como en la etapa descrita en B, el AUV (b) se mantiene unido al USV (a) mediante el sistema objeto de la invención. C. Muestra el AUV (b) desplegado tras la apertura del LARS objeto de la invención. En este apartado se indica que el USV también puede desplegar el AUV para que este baje hasta la profundidad que determine su capacidad (h3) y trabaje de forma autónoma. Figura 2.- Muestra una vista frontal de la invención, con las pinzas en trazo continuo mostrando la posición cerrada, y con trazo discontinuo mostrando la posición abierta. La vista frontal puede corresponder indistintamente con la proa o popa del USV en el que se monta la invención. La única condición es que el AUV se debe sujetar con su proa coincidiendo con la proa de USV. En esta figura se distinguen: 1. Bloque central. 2. Pinzas en posición cerrada. 2. Pinzas en posición abierta. 3. Pistones laterales. 4. Lengüetas de unión de los pistones laterales. 5. Ejes de giro de las pinzas. 6. Barras solidarias con los pistones laterales. 7. Barras para dar consistencia al conjunto de pinzas. 8. Topes. 9. Barras soldadas, que atraviesan el bloque (1) y le dan consistencia. 10. Pistón superior. 11. Sistema de anclaje con el USV. Figura 3.- Muestra una vista lateral de la invención, con las cuatro pinzas de uno de los costados en posición cerrada. La vista lateral puede corresponder indistintamente con el costado de babor o estribor. En esta figura se distinguen: 1. Bloque central. 2. a Pinzas engranadas. 2. b Pinzas no engranadas. 3. Pistones laterales. 4. Lengüetas de unión de los pistones laterales. 5. Ejes de giro de las pinzas. 6. Barras solidarias con los pistones laterales. 7. Barras para dar consistencia al conjunto de pinzas. 8. Topes. 9. Barras soldadas, que atraviesan el bloque (1) y le dan consistencia. 10. Pistón superior. 11. Sistema de anclaje con el USV. Figura 4 - Muestra una vista frontal de la invención, con las pinzas en trazo continuo mostrando la posición abierta, y con trazo discontinuo mostrando la posición cerrada. En esta figura se distinguen: 2. Pinzas en posición abierta. 3. Pistones laterales. 5. Ejes de giro de las pinzas. 6. Barras solidarias con los pistones laterales. 7. Barras para dar consistencia al conjunto de pinzas. 10. Pistón superior. 11. Sistema de anclaje con el USV. Figura 5.- Muestra una vista frontal de la invención, con una perspectiva del interior del bloque central, en la que se observan con pinzas engrandas y la barra de sujeción del pistón superior. En esta figura se distinguen: 2. Pinzas en posición cerrada. 2. Pinzas en posición abierta. 5. Ejes de giro de las pinzas. 9. Barras soldadas, que atraviesan el bloque (1) y le dan consistencia. 10. Pistón superior. 11. Sistema de anclaje con el USV. 12. Barra de sujeción. Figura 6.- Muestra una vista frontal de la invención, con las pinzas en posición abierta, y con una perspectiva interior del bloque central, en la que se observa el pistón superior contraído, lo que permite retraer el sistema de anclaje y elevar la invención hacia el USV que lo porta. En esta figura se distinguen: 2. Pinzas en posición abierta. 3. Pistones laterales. 6. Barras solidarias con los pistones laterales. 10. Pistón superior. 11. Sistema de anclaje con el USV. 12. Barra de sujeción. Figura 7.- Muestra una imagen de los distintos tipos de pinzas de la invención, con engranajes y sin ellos. En esta figura se distinguen: 2.a Pinzas engranadas. 2.b Pinzas no engranadas. 5. Ejes de giro de las pinzas. 6. Barras solidarias con los pistones laterales. 7. Barras para dar consistencia al conjunto de pinzas. Figura 8.- Muestra un esquema de funcionamiento de la invención sujetando un AUV entre sus pinzas, con todos los mecanismos bloqueados, lo que permite que el USV navegue usando el AUV como un tercer patín a modo de trimarán. El símbolo 0 representa función bloqueada y el símbolo ft representa el sentido de un movimiento. En esta maniobra, el avance se produce por el USV en el que se ha instalado la invención. Durante la misma el AUV actúa como un tercer casco del USV catamarán, convirtiéndolo en un trimarán. Los pistones solidarios con las pinzas (3) permanecen en su máxima extensión manteniendo las pinzas cerradas. El pistón superior (10) que permite izar la invención hacia el USV permanece en su máxima extensión, lo que asegura que el AUV esté completamente sumergido. Durante este tipo de maniobra el AUV puede ser simplemente transportado por el USV (A de la Figura 1) o registrar datos con sus propios sensores (B de la Figura 1) . Figura 9.- Muestra un esquema de funcionamiento de la invención en el momento en el que se produce la liberación del AUV mediante la apertura de las pinzas. El símbolo 0 representa función bloqueada y el símbolo ft representa el sentido de un movimiento. En esta maniobra, el USV permanece parado, y la maniobra no se produce de manera brusca como en el caso de otros sistemas de lanzado y recuperación, dado que el AUV ya se encuentra bajo la superficie. En esta maniobra los pistones solidarios con las pinzas (3) se cierran, dando lugar a la apertura de las pinzas y a la liberación del AUV. El pistón superior (10) que permite izar la invención hacia el USV permanece en su máxima extensión, lo que asegura la maniobra no ponga en riesgo al AUV, que está completamente sumergido. Figura 10.- Muestra un esquema de funcionamiento de la invención en el momento en el que todo el sistema se eleva hacia el USV, permitiendo que el AUV inicie su navegación de forma independiente. El símbolo 0 representa función bloqueada y el símbolo ft representa el sentido de un movimiento. En esta maniobra, el pistón superior (10) que permite izar la invención hacia el USV se cierra, levantando la invención hasta una altura que permite que el AUV inicie sus propias maniobras sin riesgo (C de la Figura 1) . Los pistones solidarios con las pinzas (3) permanecen en su posición de menor extensión, lo que evita que las pinzas se cierren. Figura 11.- Muestra un esquema de funcionamiento de la invención en el momento en el que todo el sistema se sitúa sobre el AUV permitiendo su recogida y sujeción al USV. En esta maniobra, finalizada la misión del AUV, este permanece parado en la superficie. El USV se coloca sobre él. El pistón superior (10) que permite izar la invención hacia el USV se abre al máximo, introduciendo la invención nuevamente en el agua, a una distancia que permite recoger el USV. Los pistones solidarios con las pinzas (3) se abren hasta su máxima extensión, cerrando las pinzas sobre el cuerpo del AUV y sujetándolo nuevamente. REALIZACIÓN PREFERENTE DE LA INVENCIÓN El dispositivo objeto de la invención consiste en un sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , que es independiente de los dos vehículos mencionados, el cual está diseñado para su uso desde cualquier USV con casco de catamarán, que está dotado de un sistema de anclaje para su unión a la parte inferior del USV y una serie de pinzas de costilla para la sujeción del AUV, que lo sitúan por debajo de la línea de flotación del USV y lo convierten en un casco adicional, dotando al conjunto de una configuración a modo de trimarán con casco triple híbrido (SWASSH) , lo cual elimina la necesidad de emplear sistemas de cabestrantes para arriado e izado del AUV y permite que los sensores instalados a bordo de UAV se encuentren siempre sumergidos incluso mientras se produce el desplazamiento del USV, y en el que el movimiento de las pinzas y el de elevación propia del LARS por encima de la línea de flotación del USV, para evitar la resistencia hidrodinámica en la navegación del USV una vez liberado el AUV, se produce mediante un grupo electrohidráulico equipado con una bomba de pistones de caudal variable autorregulada que se instala a bordo del USV. En esta exposición detallada de la invención y con objeto de simplificar la descripción se omiten elementos de equipo que pueden considerarse convencionales: tornillería, pasadores, tuberías, cables, etc., que pueden ser modificados en función del interés de usuario. El sistema objeto de la invención debe sujetarse a la parte inferior del USV, manteniendo al AUV siempre debajo de su línea de flotación, lo cual lo convierte en un casco adicional a los del USV. Esta ubicación elimina la necesidad de emplear sistemas de cabestrantes para arriado e izado del mismo. El movimiento del sistema se consigue empleando un grupo electrohidráulico equipado con una bomba de pistones de caudal variable autorregulada que se instala a bordo del USV, mediante la cual se acciona tanto el pistón (10) situado en la parte superior del sistema, el cual permite elevar el sistema desde el USV una vez que el AUV se ha desplegado, o bajarlo cuando el AUV deba ser recuperado, como los pistones (3) situados en los laterales del sistema que mediante la acción de cierre/apertura permiten el movimiento de una serie de pinzas de costillas que sirven de soporte del AUV. Este grupo y la bomba serán comerciales y adecuados a las dimensiones y pesos del AUV que se pretende manipular, como lo será el material de fabricación de sus componentes o el grado de protección frente a la humedad. Un Bloque central (1) da soporte al sistema. En su parte superior cuenta con un agujero circular que permite el paso del sistema de anclaje con el USV (11) . En su parte media sirve de soporte de los pistones (3) que van unidos a las barras pasantes (6) que dan soporte y dotan de movimiento a las pinzas (2) . Finalmente, en las caras anterior y posterior de su parte inferior alberga cuatro agujeros pasantes, dos destinados a ubicar las barras (9) que lo atraviesan y le dan consistencia y dos destinados a ubicar los ejes de giro (5) de las pinzas (2.a y 2.b) , mientras que en las caras laterales de su parte inferior presenta huecos para que la parte superior de las dos pinzas (2.a) se puedan introducir en su interior al girar solidarias a los ejes (5) que discurren por su interior. El sistema cuenta con cuatro pinzas, dos de ellas engranadas por su parte superior (2.a) y otras dos no engranadas (2.b) . Estas pinzas poseen forma geométrica de lúnula con objeto de que al cerrarse generen un espacio hueco circular que permita sujetar n AUV y su parte inferior presenta forma de uña abierta 25° con respecto al interior de la pinza, que permitirá mejorar la maniobra de recogida del AUV desde el USV y sujetar AUV con un diámetro de hasta el 38% superior al del AUV concebido para ser sujetado con las pinzas cerradas. El tamaño de las pinzas dependerá del diámetro del cilindro que conforma el cuerpo de los USV. Cada una de estas pinzas están dotadas de seis agujeros pasantes (tres en cada garra) : - El agujero superior de cada garra permite el paso de un eje de rotación de las pinzas (5) que atraviesa el bloque (1) . - El agujero intermedio permite el paso de una barra (6) solidaria con los pistones (3) que abren y cierran las pinzas. - El agujero inferior permite el paso de una barra (7) que le confiere consistencia al conjunto de pinzas. Cada una de estas garras se encuentran soldadas, en los puntos por los que son atravesadas, a los ejes de giro (5) a las barras pasantes (6) y a las barras pasantes (7) . Las pinzas engrandadas (2.a) , se encuentran en el interior del bloque (1) , dos a cada lado del bloque, y engranan con la simétrica del otro lado del bloque. Estas pinzas junto con las no engranadas (2.b) están soldadas a los ejes de rotación (5) , que atraviesan el bloque (1) desde la parte delantera a la trasera hasta acabar en sus extremos en dos topes (8) , que obtienen su consistencia gracias a dos varillas soldadas (9) que atraviesan el bloque. Dos pistones laterales (3) , uno a cada lado del bloque central (1) , que unidos por uno de sus extremos a este mediante lengüetas soldadas (4) , por su extremo distal presentan un agujero pasante, a través del cual discurrirán las barras pasantes (6) . La apertura/cierre de las pinzas se produce mediante la acción de cierre/apertura de los pistones, que son controlados por un grupo electrohidráulico equipado con una bomba de pistones de caudal variable autorregulada y se instala a bordo del USV. El cierre de las pinzas (2.a y 2.b) se produce mediante la elongación de los pistones laterales (3) , mientras que la apertura de las pinzas (2.a y 2.b) se produce mediante la ontracción de los pistones laterales (3) . Cuando los dos pistones (3) se cierran, actúan sobre las barras pasantes (6) que atraviesa las pinzas, cuatro a cada lado del bloque central (1) , mientras, los ejes de rotación (5) giran a demanda. Los pistones serán comerciales y se adecuarán a las dimensiones y pesos del AUV a soportar. De igual modo puede variar el material de fabricación en función del grado de protección a la humedad del que se le quiera dotar. La unión de los pistones laterales (3) al cuerpo central (1) se realiza mediante lengüetas de unión (4) Dos barras solidarias con los pistones laterales (6) , transcurren por el interior del agujero de la parte distal del pistón cuya función es, además de dar soporte a las pinzas (2.a y 2.b) , dotarlas del movimiento necesario para sujetar o liberar la sujeción del AUV. El sistema cuenta además con otras dos barras para dar consistencia al conjunto de pinzas (7) y dos ejes de giro de las pinzas (5) , que atraviesan el bloque central (1) desde su parte frontal a la trasera, uno a cada lado, y que acaban en cada extremo atravesando el tope (8) sobre el que giran libres. En los extremos delantero y trasero del bloque central (1) se encuentran dos topes (8) que permiten el movimiento de los ejes de giro de las pinzas, y que se encuentran unidos entre sí por dos barras soldadas (9) que atraviesan el bloque y que le dan consistencia. Un pistón superior (10) , que se encuentra, como su propio nombre indica, situado en la parte superior del bloque (1) , va unido solidariamente a la tapa superior del sistema de anclaje con el USV (11) . La subida del sistema desde el USV, una vez se ha desplegado el AUV, se produce mediante la contracción del pistón superior (10) , mientras que la bajada del sistema desde el USV, para recuperar y dar soporte al AUV, se produce mediante la elongación del pistón superior (10) . Un sistema de anclaje con el USV (11) , compuesto por un cilindro y una tapa superior de forma circular, va unido de manera solidaria el pistón superior (19) . Por último, una barra de sujeción (12) va unida a la parte inferior del pistón superior (19) y soldada a las caras internas de los laterales del bloque (1) . Cuando el sistema se encuentra sujetando el AUV entre sus pinzas, los pistones laterales solidarios con las pinzas (3) permanecen en su máxima extensión manteniendo las pinzas cerradas y el pistón superior (10) permanece en su máxima extensión, lo que asegura que el AUV esté completamente sumergido. Cuando el sistema se encuentra durante la maniobra de lanzado los pistones laterales solidarios con las pinzas (3) se cierran, dando lugar a la apertura de las pinzas y a la liberación del AUV y el pistón superior (10) permanece en su máxima extensión, lo que asegura que la maniobra no ponga en riesgo al AUV, que está completamente sumergido. Para subir el sistema hacia el USV, el pistón superior (10) se cierra, levantando la invención hasta una altura que permite que el AUV inicie sus propias maniobras sin riesgo y los pistones laterales solidarios con las pinzas (3) permanecen en su posición de menor extensión, lo que evita que las pinzas se cierren. Durante la maniobra de recuperación del AUV, con el USV sobre el AUV, el pistón superior (10) se abre al máximo, introduciendo el sistema en el agua, a una distancia que permite recoger el USV y los pistones solidarios con las pinzas (3) se abren hasta su máxima extensión, cerrando las pinzas sobre el cuerpo del AUV. La configuración del sistema objeto de la invención permite realizar las siguientes maniobras: a. fijar temporalmente un AUV (b) a la estructura de un USV (a) , permitiendo que todo el cuerpo del AUV (b) permanezca sumergido en todo momento, b. portar el AUV (b) dentro de la masa de agua mientras el USV (a) se desplaza sobre la misma con sus propios medios de propulsión, a rumbo GPS programado y apoyado por las redes de satélites (c) o de forma controlada desde una estación de control situada en tierra o a bordo de un barco de apoyo (d) , c. tomar datos del medio marino a través de los sensores del USV (a) mientras que el AUV (b) se encuentra soportado por este, sin entorpecer con el cuerpo del AUV (b) la recepción de datos o las maniobras necesarias a para la toma de los mismos, y hasta una profundidad (h1) determinada por las capacidades de estos sensores, d. tomar datos del medio marino a través de los sensores del AUV (b) , mientras este se encuentra fijo al USV (a) , sin que la presencia del USV (b) que lo porta entorpezca la recepción de datos, y hasta una profundidad (h2) determinada por las capacidades de estos sensores, e. lanzar en un punto predeterminado el AUV (b) que se encuentra fijado al USV (a) sin poner en riesgo la integridad de ninguno de los vehículos, ni las maniobras de navegación del AUV (b) una vez liberado, para que pueda bajar hasta la profundidad que determine su capacidad (h3) y trabaje de forma autónoma, f. recoger el AUV (b) cuando este haya finalizado su misión y se encuentre en superficie, para volver a fijarlo al USV (a) sin poner en riesgo la integridad de ninguno de los vehículos, ni las maniobras de navegación del USV (a) una vez que se haya fijado en AUV (b) . Como se ha indicado anteriormente en la descripción del grupo electrohidráulico y la bomba, así como en el caso de los pistones, los materiales del resto de componentes del sistema pueden variar en función del grado de protección a la humedad del que se quiera dotar. Con carácter ilustrativo y no limitativo, se indica que, en una realización del sistema: - Las pinzas (2.a y 2.b) , las piezas que conforman la caja del bloque central (1) , el sistema de anclaje (11) y los topes (8) se han construido a partir de plancha de aluminio naval Al-Mg AA5083, con un tratamiento de anodizado duro, lo que mejora sus propiedades frente a la corrosión y el desgaste. - Las barras (5) , (6) , (7) y (9) se han fabricado en acero inoxidable calidad AISI 316L. - La tornillería empleada ha sido de acero inoxidable calidad AISI 316L aisladas con teflón para evitar el contacto eléctrico con el aluminio.
+ ES-2955225_A1 SISTEMA RÍGIDO DE LANZAMIENTO Y RECUPERACIÓN DE UN VEHÍCULO AUTÓNOMO SUBMARINO DESDE UN VEHÍCULO AUTÓNOMO MARINO DE SUPERFICIE SECTOR DE LA TÉCNICA Tecnología marina aplicada a vehículos autónomos marinos. ANTECEDENTES DE LA INVENCIÓN La Universidad de Cádiz dispone de un conjunto de vehículos no tripulados, marinos y aéreos que, frente a los clásicos barcos oceanográficos, sumergibles o aeronaves, le permiten llevar a cabo diversas misiones científicas a un menor coste, más largas y comprometidas, con mayor seguridad para el personal que los opera, y con capacidad de un despliegue más rápido en zonas de difícil acceso o vetadas para otros vehículos tripulados. En este documento se hace referencia al uso de dos tipos de vehículos autónomos: - Por un lado, se hace referencia al uso de la invención propuesta en un vehículo autónomo marino de superficie (conocido por sus siglas en ingles USV, Unmanned Surface Vehicle o ASC, Autonomous Surface Craft) . Su configuración es similar a la de un barco tradicional, pero puede ser operados de forma totalmente autónoma, mediante la programación previa de una ruta, o de forma semiautónoma, con el control ejercido desde una estación de control en tierra o a bordo de otra embarcación. Dado que opera sobre la superficie de mares o lagos, su localización es precisa, la comunicación vehículo-operador es inmediata y la transmisión de datos a tiempo real es inmediata. - Por otro lado, también se hace referencia al uso de la invención propuesta en un vehículo autónomo submarino (AUV, del inglés de Autonomous Underwater Vehicle) , que posee una arquitectura de control que le permite realizar misiones bajo el agua sin la supervisión de un operador, con las misiones y navegación previamente programadas. A diferencia del USV, su control en tiempo real por un operador, la transmisión de datos, la localización en la que se encuentra o el rumbo que sigue en ada momento, son cuestiones mucho más limitadas dado que opera en la columna de agua donde no acceden las señales GPS, WiFi, etc. La comunicación y control absoluto sobre el AUV solo se recupera cuando el vehículo asciende a la superficie. Las diferencias expuestas entre ambos vehículos condicionan también el tipo de misión que realiza uno u otro, pero también en grado de autonomía y las dimensiones con las que se pueden construir. Así existen USV de poco más de 1 m de eslora, con pesos inferiores a 40 Kg y autonomías de un máximo de 6 horas (e.g. https://www.oceanalpha.com/product-item/sl20/) , hasta otros con las dimensiones de un gran navío tripulado (hasta 91 m de eslora y 2000 Tn de desplazamiento) y autonomía de meses y capacidad para navegar hasta 6.500 Km (e.g. https://sgp.fas.org/crs/weapons/R45757.pdf) . Sin embargo, los AUV presentan dimensiones menores, menor capacidad de carga y una autonomía más limitada. En el mercado hay UAV desde algo menos de 1 m de eslora, menos de 30 Kg de peso y autonomía máxima de 4 horas (e.g. https://www.lockheedmartin.com/enus/products/a-size-autonomous-underwater-vehicles.html) hasta vehículos de 7 m de eslora, 1.5 Tn, y 74 horas de autonomía (e.g. https://www.kongsberg.com/maritime/products/marine-robotics/autonomousunderwater-vehicles/AUV-hugin/#downloads) . Las diferentes características de un USV y un AUV determinan las aplicaciones para los que uno u otro son más adecuados. Sin embargo, los dos vehículos trabajando de forma coordinada, permiten una complementariedad que multiplica las capacidades de cada sistema por separado. Algunos ejemplos de aplicaciones que se benefician de esta colaboración son la prospección de recursos vivos y energéticos marinos, la vigilancia en aguas remotas desconocidas, las contramedidas frente a minas y la seguridad portuaria. En estas misiones, un AUV por sí solo puede no ser suficiente, ya carece de la capacidad de recorrer largas distancias a gran velocidad y, como se ha indicado, no puede comunicarse con un barco de superficie o con la costa sin salir a la superficie. Un USV, sin embargo, puede tener mayores dimensiones, capacidad de carga y autonomía, y se puede convertir en una buena plataforma móvil de lanzamiento y recuperación (LARS, del inglés de Launch and Recover y System) ya que puede realizar una navegación autónoma en un entorno marino desconocido (e.g. https://www.sea-kit.com/) . Además, el USV puede seguir operando como tal haciendo uso de sus propios sistemas de toma de datos. La configuración del caso de los USV suele ser o tipo monocasco, o tipo catamarán. En este tipo de sistemas colaborativos entre un USV y un AUV, el diseño del sistema LARS es vital, sobre todo cuando el control humano debe limitarse si se pretenden preservar los grados de autonomía que aportan ambos vehículos. El lanzamiento y la recuperación de una AUV es una de las operaciones de mayor riesgo que se realizan en estas operaciones. La función principal de un sistema autónomo de lanzamiento y recuperación es permitir que el AUV y sus cargas útiles se lleven a bordo del vehículo anfitrión, bien a un buque convencional bien a un USV, de manera segura, eficiente y sin daños. Los mecanismos de lanzamiento y recuperación de vehículos submarinos autónomos pueden ser de muchos tipos. En la literatura y en el mercado existen diferentes tipos de LARS. Los más sencillos se basan en redes de transporte y captura y cabos con mecanismos de suelta y enganche que son accionados manual o mecánicamente al vehículo anfitrión. Existen mecanismos rígidos, desde grúas, rampas de lanzado que forman parte del casco del vehículo anfitrión y que requiere de la acomodación del AUV en la bañera o en la bodega del vehículo anfitrión (e.g. https://www.sea-kit.com/) , brazos articulados que despliegan o recuperan al AUV acomodado en la cubierta del vehículo anfitrión por su popa (https://krakenrobotics.com/products/launch-recover y /) , o sistemas mixtos que emplean brazos articulados que despliegan una rampa de izado o arriado del AUV (e.g. https://www.hydro-international.com/content/news/this-is-howan-unmanned-launch-and-recover y -system-operates) . En todos estos casos es necesario el apoyo de un cabestrante eléctrico que eleva el peso de USV, restando su carta de pago. Estos cabestrantes, además, deben ser alimentados por baterías adicionales a las que incorpora el propio vehículo para su navegación. Estos mecanismos pueden ser de diferentes tamaños, adaptados no solo al tamaño del vehículo submarino autónomo a desplegar, sino también a las dimensiones, capacidades y características de la plataforma desde la que se despliega (un barco tripulado, un vehículo autónomo de superficie, una plataforma off-shore, el veril de un puerto, etc.) . En el caso concreto de los mecanismos rígidos, suelen conllevar pesos, dimensiones y requerimientos energéticos elevados, que impide su empleo en USV de pequeña eslora. En la actualidad se está trabajando en el desarrollo de LARS para USV de pequeña eslora. En algunos trabajos (e.g. https://ieeexplore.ieee.org/document/8469058) se ha esarrollado un sistema automatizado de lanzamiento y recuperación que permite transporta un AUV de 1, 6 m de eslora y 38, 5 Kg de peso a bordo de un USV de 4.05 m de eslora y 180 Kg de peso. En este diseño se monta una línea flexible en el USV para proporcionar un cable de conexión al AUV durante el lanzamiento y la recuperación. Esta línea puede extenderse hacia el agua durante la recuperación del AUV o permanecer retraída a bordo del USV. Para mantener la línea tensa bajo el agua se utiliza un hidrodeslizador con un peso en el extremo de la línea. Como en los casos anteriores se necesita un cabrestante para permitir que el conjunto de la línea se mueva dentro y fuera del agua. Un segundo cabrestante se utiliza para mover la estructura del carro dentro y fuera de la superficie del agua, para desplegar el AUV durante el lanzamiento y para izarlo a bordo del USV durante la recuperación. En otros trabajos (e.g. https://www.mdpi.com/1424-8220/20/9/2633/htm) el AUV permanece unido en todo momento al USV a través de un cable que se une a un cabestrante. Este sistema suministra energía continuamente al AUV y evita su pérdida, dado que en todo momento puede ser recuperado por el USV. Pero este mismo cable limita la capacidad de movimiento y la distancia a recorrer del AUV frente a las coordenadas en las que se encuentra el USV. En general, de estos mecanismos, los rígidos cumplen con el requisito de sujetar al AUV de una forma precisa y segura durante su transporte, lanzado y recuperación. Esto no ocurre con otros mecanismos como las redes o los cabos de sujeción, que no son rígidos y que son insuficientes para muchas aplicaciones. En los sistemas rígidos se deben cumplir al menos dos requisitos: que dispongan de algún medio para disipar la energía cinética el vehículo cuando impacta con el agua en las maniobras de arriado e izado, y que permitan que el vehículo se aleje del mecanismo de sujeción por sus propios medios. El dispositivo objeto de la invención es un sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , que es independiente de los dos vehículos mencionados, el cual está diseñado para su uso desde cualquier USV con doble casco de catamarán, que se sujeta a la parte inferior del USV mediante un sistema rígido de anclaje, que no emplea un sistema de cabestrantes para arriado e izado del AUV, que mantiene en todo momento al AUV por debajo de la línea de flotación del USV permitiendo que los sensores instalados a bordo de UAV se encuentren siempre sumergidos incluso mientras se produce el desplazamiento del USV, convirtiendo al AUV en un casco dicional del USV que se transforma en un trimarán, en el que la sujeción del AUV se realiza mediante un sistema de pinzas, y en el que el movimiento de las pinzas y el de elevación propia del LARS por encima de la línea de flotación del USV para evitar la resistencia hidrodinámica en la navegación del USV una vez liberado el AUV se produce mediante un grupo electrohidráulico equipado con una bomba de pistones de caudal variable autorregulada que se instala a bordo del USV. Todos los sistemas, rígidos o no, que componen el estado de la técnica actual tienen en común que mantienen al AUV fuera del nivel del agua durante el transporte hasta el punto de lanzado, y que una vez que el AUV es recuperado, este vuelve a izarse sobre el nivel del agua en la plataforma que lo ha desplegado. Algunos de estos ejemplos los tenemos en documentos de patentes CN109178260A, CN111874167, CN110775200A, así como en las publicaciones "A USV-Based automated launch and recover y system for AUVs" Edoardo I Sarda et al.o "Design of an Unconventional ASV for Underwater Vehicles Recover y : Simulation of the motions for operations in rough seas", Brizzolara et al. Siendo identificados los documentos anteriores como los más cercanos al objeto de la invención, es importante tener en cuenta que en ninguno de ellos se contempla la posibilidad de que el AUV se mantenga en todo momento por debajo de la línea de flotación del USV, incluso mientras se produce el desplazamiento de este. Esta característica básica del dispositivo objeto de la invención propuesta permite que los sensores instalados a bordo de AUV se encuentren siempre sumergidos y en funcionamiento y convierten al AUV en un casco adicional del USV. El hecho de que el AUV se mantenga sumergido en todo momento, incluso durante el desplazamiento del USV, permiten desarrollar dos tipos de tareas: misiones propias de un USV, empleando tanto sus propios sensores, así como misiones en las que además se emplee la sensórica disponible en el AUV que viaja inmovilizado por el LARS. Por otra parte, el hecho de que el AUV se mantenga sumergido y actúe como un tercer casco, convirtiendo al USV en un trimarán con casco triple híbrido, denominado de tipo SWASSH (Small Waterplane Area Single Stabilised Hull) , compuesto por la unión de un USV con casco de catamarán y un AUV con forma de torpedo, aporta evidentes entajas en la navegabilidad del conjunto. Una primera ventaja es que el casco central sumergido formado por el AUV aumenta la estabilidad en el sentido de navegación longitudinal, y los cascos laterales del USV mejoran la estabilidad transversal. Pero adicionalmente, este casco híbrido formado por la unión del USV y el AUV disminuye el área mojada del doble casco del USV, necesita menos potencia del motor a velocidades moderadamente altas y disminuye la resistencia a la formación de olas. EXPLICACIÓN DE LA INVENCIÓN La invención es un dispositivo automático y rígido, para lanzar y recuperar (LARS) vehículos submarinos autónomos (AUV) desde un vehículo de superficie no tripulado (USV) con casco de catamarán, en un concepto absolutamente novedoso que se ha desarrollado en el seno del Proyecto KTTSeaDrones, cofinanciado por el Fondo Europeo de Desarrollo Regional FEDER a través del programa Interreg V-A España-Portugal (POCTEP) 2014-2020. El dispositivo es independiente de los dos vehículos mencionados y está dotado de un sistema de anclaje para su unión a la parte inferior del USV mediante un sistema rígido y de sistema hidráulico de pinza de costilla con capacidad para adaptarse a distintos diámetros para la sujeción del AUV que lo mantiene en todo momento por debajo de la línea de flotación del USV. Esta característica del confiere al sistema los siguientes efectos técnicos: a) Permite que los sensores instalados a bordo de UAV se encuentren siempre sumergidos y operativos. De esta forma, el USV podrá desarrollar dos tipos de tareas: 1) misiones propias de un USV, empleando tanto sus propios sensores como la sensórica disponible en el AUV, y 2) vehículo con elevada autonomía para el transporte del AUV hasta la zona de trabajo, en la que podrá lanzarlo y posteriormente recuperarlo. b) Permite que el AUV actúe como un tercer casco, convirtiendo al USV en un trimarán con casco triple híbrido, denominado de tipo SWASSH (Small Waterplane Area Single Stabilised Hull) , compuesto por la unión de un USV con casco de catamarán y un AUV con forma de torpedo, lo cual aporta evidentes ventajas en la navegabilidad del conjunto. El sistema hidráulico de pinza de costilla es capaz de adaptarse a distintos diámetros de UAV y está fabricado en aluminio naval anodizado para aligerar peso, soportar la carga, y mejorar las propiedades frente al desgaste por fricción en el AUV y la corrosión en agua de mar. El movimiento de las costillas de pinza es generado por dos ejes huecos, que corren opuestos y son accionados hidráulicamente por dos pistones laterales. Un tercer pistón superior permite elevar el sistema por encima de la línea de flotación del USV una vez que el AUV se ha desplegado para evitar la resistencia hidrodinámica en la navegación del USV y bajarlo cuando el AUV deba ser recuperado. El grupo electrohidráulico va equipado con una bomba de pistones de caudal variable autorregulada y se instala a bordo del USV. La disposición del AUV bajo la estructura del catamarán que conforma el USV reduce la necesidad del empleo de sistemas de cabestrantes para el arriado e izado de todo el sistema, disminuye la ocupación y los pesos a bordo de USV, mejora la estabilidad del USV catamarán al convertirlo en una embarcación trimarán, permite que los sensores del AUV actúen como sensores propios del ASV en aguas someras, y permite que el AUV sea transportado de forma autónoma y sin consumo energético hasta el punto de trabajo gracias a la mayor autonomía del USV que lo transporta. Entre las ventajas que derivan de la configuración del LARS objeto de la invención, derivadas de la unión del USV y AUV, adoptando una configuración de casco triple híbrido de tipo SWASSH, interesa mencionar: a) Permite su desplazamiento del conjunto a una velocidad mayor y menor consumo a la que podría desplazarse un USV con casco de catamarán. b) La elevación del dispositivo por encima de la línea de flotación del USV, una vez liberado el AUV, convierte al USV nuevamente en un catamarán, dotándolo de mayor maniobrabilidad. c) Permite que durante la navegación el AUV puede activar todos sus sensores, multiplicando las prestaciones del USV que lo transporta. Cada uno de estos vehículos dispone de un sistema de navegación independiente, que recibe la información de los sensores de posición, velocidad y aceleración del vehículo. En el caso de los AUV, estos sistemas de navegación funcionan correctamente cuando el vehículo se encuentra sumergido a una determinada profundidad, que por lo general debe de ser e un mínimo de tres metros para evitar los efectos de oleaje en superficie. Teniendo en cuenta la distancia mínima de navegación del AUV respecto al fondo marino, que no debe de ser nunca inferior a los 2 metros, estamos hablando de que un AUV puede empezar a realizar misiones en fondos de 5 metros de profundidad o más, pero nunca en fondos más someros. Esto deja fuera de su campo de acción las zonas marinas más cercanas a costa, en fondos de 0 a 5 metros de profundidad. Sin embargo, cuando el AUV se encuentra incorporado como tercer casco del USV en una configuración tipo SWASSH, es el sistema de navegación del USV el que coordina la navegación con el sistema de guiado y control del vehículo. La ventaja se produce debido a que el USV tiene poco calado, normalmente inferior a 40 cm. Eso permite que el AUV opere esclavo al USV en zonas de costa a partir de 50 cm a 1 m de profundidad, vetado para el AUV cuando este navega por sus propios medios. d) Mientras el AUV está siendo transportado por el USV, actúa como un tercer casco muy cerca de la superficie, permitiendo que su antena permanezca siempre fuera del agua, asegurando una comunicación Wi-fi continua entre el AUV y el USV que lo porta. Los AUV suelen disponer de una antena que permite comunicar el vehículo con la estación de control a través de Wi-fi. Durante esta comunicación, el operador del vehículo puede programar la misión que realizará el AUV o descargarse los datos que este ha recopilado. Pero esta comunicación requiere que el vehículo y el operador se encuentren muy cercanos. En el caso del AUV funcionando como tercer casco de la configuración tipo SWASSH, la antena permanece siempre fuera del agua, asegurando una comunicación Wi-fi continua entre el AUV y el USV que lo porta. La comunicación entre el operador y el AUV ya no se produce de forma directa, lo que limita la distancia a la que estos se pueden encontrar, sino a través de los sistemas de comunicación del USV incluyendo radio, que debido a su mayor carta de pago siempre son más robustos y fiables que los del AUV. BREVE DESCRIPCIÓN DE LOS DIBUJOS Para complementar la descripción que se está realizando y con objeto de ayudar a una mejor comprensión de las características de la invención, se acompaña como parte integrante de dicha descripción, un conjunto de dibujos en donde, con carácter ilustrativo y no limitativo, se ha representado lo siguiente: Figura 1.- Tanto la figura 1a como 1b muestra un esquema de los distintos modos de funcionamiento que permite el sistema objeto de la invención. Las referencias empleadas corresponden a: a. Vehículo autónomo de superficie (en adelante USV) . b. Vehículo autónomo submarino (en adelante AUV) . c. Redes de satélites. d. Estación de control. w. Masa de agua. h1. Profundidad a la que el USV puede tomar datos mediante sus propios sensores. h2. Profundidad a la que el AUV puede tomar datos mediante sus sensores, mientras se encuentra fijo al USV. h3. Profundidad a la que el AUV puede tomar datos mediante sus sensores, una vez ha sido liberado del USV. En estas figuras se contempla: A. Muestra el trabajo del USV transportando un AUV. En este apartado se esquematiza que, sobre una masa de agua (w) , oceánica o continental, navega un vehículo autónomo de superficie (a) con casco de catamarán que opera de forma autónoma seguido a una distancia y con una autonomía determinada por sus capacidades. Este vehículo puede tomar datos mediante sus sensores hasta una profundidad (h1) determinada por las capacidades de estos sensores, mientras porta un vehículo autónomo submarino (b) a modo de un tercer casco que convierte al catamarán en un trimarán. B. Muestra el AUV a modo cabeza sensórica, mientras va sujeto al USV. En este apartado se expresa que el USV (a) también puede transportar el AUV (b) mientras esta toma datos con sus propios sensores, hasta una profundidad (h2) determinada por las capacidades de estos sensores. Tanto en la etapa descrita en A como en la etapa descrita en B, el AUV (b) se mantiene unido al USV (a) mediante el sistema objeto de la invención. C. Muestra el AUV (b) desplegado tras la apertura del LARS objeto de la invención. En este apartado se indica que el USV también puede desplegar el AUV para que este baje hasta la profundidad que determine su capacidad (h3) y trabaje de forma autónoma. Figura 2.- Muestra una vista frontal de la invención, con las pinzas en trazo continuo mostrando la posición cerrada, y con trazo discontinuo mostrando la posición abierta. La vista frontal puede corresponder indistintamente con la proa o popa del USV en el que se monta la invención. La única condición es que el AUV se debe sujetar con su proa coincidiendo con la proa de USV. En esta figura se distinguen: 1. Bloque central. 2. Pinzas en posición cerrada. 2. Pinzas en posición abierta. 3. Pistones laterales. 4. Lengüetas de unión de los pistones laterales. 5. Ejes de giro de las pinzas. 6. Barras solidarias con los pistones laterales. 7. Barras para dar consistencia al conjunto de pinzas. 8. Topes. 9. Barras soldadas, que atraviesan el bloque (1) y le dan consistencia. 10. Pistón superior. 11. Sistema de anclaje con el USV. Figura 3.- Muestra una vista lateral de la invención, con las cuatro pinzas de uno de los costados en posición cerrada. La vista lateral puede corresponder indistintamente con el costado de babor o estribor. En esta figura se distinguen: 1. Bloque central. 2. a Pinzas engranadas. 2. b Pinzas no engranadas. 3. Pistones laterales. 4. Lengüetas de unión de los pistones laterales. 5. Ejes de giro de las pinzas. 6. Barras solidarias con los pistones laterales. 7. Barras para dar consistencia al conjunto de pinzas. 8. Topes. 9. Barras soldadas, que atraviesan el bloque (1) y le dan consistencia. 10. Pistón superior. 11. Sistema de anclaje con el USV. Figura 4 - Muestra una vista frontal de la invención, con las pinzas en trazo continuo mostrando la posición abierta, y con trazo discontinuo mostrando la posición cerrada. En esta figura se distinguen: 2. Pinzas en posición abierta. 3. Pistones laterales. 5. Ejes de giro de las pinzas. 6. Barras solidarias con los pistones laterales. 7. Barras para dar consistencia al conjunto de pinzas. 10. Pistón superior. 11. Sistema de anclaje con el USV. Figura 5.- Muestra una vista frontal de la invención, con una perspectiva del interior del bloque central, en la que se observan con pinzas engrandas y la barra de sujeción del pistón superior. En esta figura se distinguen: 2. Pinzas en posición cerrada. 2. Pinzas en posición abierta. 5. Ejes de giro de las pinzas. 9. Barras soldadas, que atraviesan el bloque (1) y le dan consistencia. 10. Pistón superior. 11. Sistema de anclaje con el USV. 12. Barra de sujeción. Figura 6.- Muestra una vista frontal de la invención, con las pinzas en posición abierta, y con una perspectiva interior del bloque central, en la que se observa el pistón superior contraído, lo que permite retraer el sistema de anclaje y elevar la invención hacia el USV que lo porta. En esta figura se distinguen: 2. Pinzas en posición abierta. 3. Pistones laterales. 6. Barras solidarias con los pistones laterales. 10. Pistón superior. 11. Sistema de anclaje con el USV. 12. Barra de sujeción. Figura 7.- Muestra una imagen de los distintos tipos de pinzas de la invención, con engranajes y sin ellos. En esta figura se distinguen: 2.a Pinzas engranadas. 2.b Pinzas no engranadas. 5. Ejes de giro de las pinzas. 6. Barras solidarias con los pistones laterales. 7. Barras para dar consistencia al conjunto de pinzas. Figura 8.- Muestra un esquema de funcionamiento de la invención sujetando un AUV entre sus pinzas, con todos los mecanismos bloqueados, lo que permite que el USV navegue usando el AUV como un tercer patín a modo de trimarán. El símbolo 0 representa función bloqueada y el símbolo ft representa el sentido de un movimiento. En esta maniobra, el avance se produce por el USV en el que se ha instalado la invención. Durante la misma el AUV actúa como un tercer casco del USV catamarán, convirtiéndolo en un trimarán. Los pistones solidarios con las pinzas (3) permanecen en su máxima extensión manteniendo las pinzas cerradas. El pistón superior (10) que permite izar la invención hacia el USV permanece en su máxima extensión, lo que asegura que el AUV esté completamente sumergido. Durante este tipo de maniobra el AUV puede ser simplemente transportado por el USV (A de la Figura 1) o registrar datos con sus propios sensores (B de la Figura 1) . Figura 9.- Muestra un esquema de funcionamiento de la invención en el momento en el que se produce la liberación del AUV mediante la apertura de las pinzas. El símbolo 0 representa función bloqueada y el símbolo ft representa el sentido de un movimiento. En esta maniobra, el USV permanece parado, y la maniobra no se produce de manera brusca como en el caso de otros sistemas de lanzado y recuperación, dado que el AUV ya se encuentra bajo la superficie. En esta maniobra los pistones solidarios con las pinzas (3) se cierran, dando lugar a la apertura de las pinzas y a la liberación del AUV. El pistón superior (10) que permite izar la invención hacia el USV permanece en su máxima extensión, lo que asegura la maniobra no ponga en riesgo al AUV, que está completamente sumergido. Figura 10.- Muestra un esquema de funcionamiento de la invención en el momento en el que todo el sistema se eleva hacia el USV, permitiendo que el AUV inicie su navegación de forma independiente. El símbolo 0 representa función bloqueada y el símbolo ft representa el sentido de un movimiento. En esta maniobra, el pistón superior (10) que permite izar la invención hacia el USV se cierra, levantando la invención hasta una altura que permite que el AUV inicie sus propias maniobras sin riesgo (C de la Figura 1) . Los pistones solidarios con las pinzas (3) permanecen en su posición de menor extensión, lo que evita que las pinzas se cierren. Figura 11.- Muestra un esquema de funcionamiento de la invención en el momento en el que todo el sistema se sitúa sobre el AUV permitiendo su recogida y sujeción al USV. En esta maniobra, finalizada la misión del AUV, este permanece parado en la superficie. El USV se coloca sobre él. El pistón superior (10) que permite izar la invención hacia el USV se abre al máximo, introduciendo la invención nuevamente en el agua, a una distancia que permite recoger el USV. Los pistones solidarios con las pinzas (3) se abren hasta su máxima extensión, cerrando las pinzas sobre el cuerpo del AUV y sujetándolo nuevamente. REALIZACIÓN PREFERENTE DE LA INVENCIÓN El dispositivo objeto de la invención consiste en un sistema rígido de lanzamiento y recuperación de un vehículo autónomo submarino (AUV) , desde un vehículo autónomo marino de superficie (USV) , que es independiente de los dos vehículos mencionados, el cual está diseñado para su uso desde cualquier USV con casco de catamarán, que está dotado de un sistema de anclaje para su unión a la parte inferior del USV y una serie de pinzas de costilla para la sujeción del AUV, que lo sitúan por debajo de la línea de flotación del USV y lo convierten en un casco adicional, dotando al conjunto de una configuración a modo de trimarán con casco triple híbrido (SWASSH) , lo cual elimina la necesidad de emplear sistemas de cabestrantes para arriado e izado del AUV y permite que los sensores instalados a bordo de UAV se encuentren siempre sumergidos incluso mientras se produce el desplazamiento del USV, y en el que el movimiento de las pinzas y el de elevación propia del LARS por encima de la línea de flotación del USV, para evitar la resistencia hidrodinámica en la navegación del USV una vez liberado el AUV, se produce mediante un grupo electrohidráulico equipado con una bomba de pistones de caudal variable autorregulada que se instala a bordo del USV. En esta exposición detallada de la invención y con objeto de simplificar la descripción se omiten elementos de equipo que pueden considerarse convencionales: tornillería, pasadores, tuberías, cables, etc., que pueden ser modificados en función del interés de usuario. El sistema objeto de la invención debe sujetarse a la parte inferior del USV, manteniendo al AUV siempre debajo de su línea de flotación, lo cual lo convierte en un casco adicional a los del USV. Esta ubicación elimina la necesidad de emplear sistemas de cabestrantes para arriado e izado del mismo. El movimiento del sistema se consigue empleando un grupo electrohidráulico equipado con una bomba de pistones de caudal variable autorregulada que se instala a bordo del USV, mediante la cual se acciona tanto el pistón (10) situado en la parte superior del sistema, el cual permite elevar el sistema desde el USV una vez que el AUV se ha desplegado, o bajarlo cuando el AUV deba ser recuperado, como los pistones (3) situados en los laterales del sistema que mediante la acción de cierre/apertura permiten el movimiento de una serie de pinzas de costillas que sirven de soporte del AUV. Este grupo y la bomba serán comerciales y adecuados a las dimensiones y pesos del AUV que se pretende manipular, como lo será el material de fabricación de sus componentes o el grado de protección frente a la humedad. Un Bloque central (1) da soporte al sistema. En su parte superior cuenta con un agujero circular que permite el paso del sistema de anclaje con el USV (11) . En su parte media sirve de soporte de los pistones (3) que van unidos a las barras pasantes (6) que dan soporte y dotan de movimiento a las pinzas (2) . Finalmente, en las caras anterior y posterior de su parte inferior alberga cuatro agujeros pasantes, dos destinados a ubicar las barras (9) que lo atraviesan y le dan consistencia y dos destinados a ubicar los ejes de giro (5) de las pinzas (2.a y 2.b) , mientras que en las caras laterales de su parte inferior presenta huecos para que la parte superior de las dos pinzas (2.a) se puedan introducir en su interior al girar solidarias a los ejes (5) que discurren por su interior. El sistema cuenta con cuatro pinzas, dos de ellas engranadas por su parte superior (2.a) y otras dos no engranadas (2.b) . Estas pinzas poseen forma geométrica de lúnula con objeto de que al cerrarse generen un espacio hueco circular que permita sujetar n AUV y su parte inferior presenta forma de uña abierta 25° con respecto al interior de la pinza, que permitirá mejorar la maniobra de recogida del AUV desde el USV y sujetar AUV con un diámetro de hasta el 38% superior al del AUV concebido para ser sujetado con las pinzas cerradas. El tamaño de las pinzas dependerá del diámetro del cilindro que conforma el cuerpo de los USV. Cada una de estas pinzas están dotadas de seis agujeros pasantes (tres en cada garra) : - El agujero superior de cada garra permite el paso de un eje de rotación de las pinzas (5) que atraviesa el bloque (1) . - El agujero intermedio permite el paso de una barra (6) solidaria con los pistones (3) que abren y cierran las pinzas. - El agujero inferior permite el paso de una barra (7) que le confiere consistencia al conjunto de pinzas. Cada una de estas garras se encuentran soldadas, en los puntos por los que son atravesadas, a los ejes de giro (5) a las barras pasantes (6) y a las barras pasantes (7) . Las pinzas engrandadas (2.a) , se encuentran en el interior del bloque (1) , dos a cada lado del bloque, y engranan con la simétrica del otro lado del bloque. Estas pinzas junto con las no engranadas (2.b) están soldadas a los ejes de rotación (5) , que atraviesan el bloque (1) desde la parte delantera a la trasera hasta acabar en sus extremos en dos topes (8) , que obtienen su consistencia gracias a dos varillas soldadas (9) que atraviesan el bloque. Dos pistones laterales (3) , uno a cada lado del bloque central (1) , que unidos por uno de sus extremos a este mediante lengüetas soldadas (4) , por su extremo distal presentan un agujero pasante, a través del cual discurrirán las barras pasantes (6) . La apertura/cierre de las pinzas se produce mediante la acción de cierre/apertura de los pistones, que son controlados por un grupo electrohidráulico equipado con una bomba de pistones de caudal variable autorregulada y se instala a bordo del USV. El cierre de las pinzas (2.a y 2.b) se produce mediante la elongación de los pistones laterales (3) , mientras que la apertura de las pinzas (2.a y 2.b) se produce mediante la ontracción de los pistones laterales (3) . Cuando los dos pistones (3) se cierran, actúan sobre las barras pasantes (6) que atraviesa las pinzas, cuatro a cada lado del bloque central (1) , mientras, los ejes de rotación (5) giran a demanda. Los pistones serán comerciales y se adecuarán a las dimensiones y pesos del AUV a soportar. De igual modo puede variar el material de fabricación en función del grado de protección a la humedad del que se le quiera dotar. La unión de los pistones laterales (3) al cuerpo central (1) se realiza mediante lengüetas de unión (4) Dos barras solidarias con los pistones laterales (6) , transcurren por el interior del agujero de la parte distal del pistón cuya función es, además de dar soporte a las pinzas (2.a y 2.b) , dotarlas del movimiento necesario para sujetar o liberar la sujeción del AUV. El sistema cuenta además con otras dos barras para dar consistencia al conjunto de pinzas (7) y dos ejes de giro de las pinzas (5) , que atraviesan el bloque central (1) desde su parte frontal a la trasera, uno a cada lado, y que acaban en cada extremo atravesando el tope (8) sobre el que giran libres. En los extremos delantero y trasero del bloque central (1) se encuentran dos topes (8) que permiten el movimiento de los ejes de giro de las pinzas, y que se encuentran unidos entre sí por dos barras soldadas (9) que atraviesan el bloque y que le dan consistencia. Un pistón superior (10) , que se encuentra, como su propio nombre indica, situado en la parte superior del bloque (1) , va unido solidariamente a la tapa superior del sistema de anclaje con el USV (11) . La subida del sistema desde el USV, una vez se ha desplegado el AUV, se produce mediante la contracción del pistón superior (10) , mientras que la bajada del sistema desde el USV, para recuperar y dar soporte al AUV, se produce mediante la elongación del pistón superior (10) . Un sistema de anclaje con el USV (11) , compuesto por un cilindro y una tapa superior de forma circular, va unido de manera solidaria el pistón superior (19) . Por último, una barra de sujeción (12) va unida a la parte inferior del pistón superior (19) y soldada a las caras internas de los laterales del bloque (1) . Cuando el sistema se encuentra sujetando el AUV entre sus pinzas, los pistones laterales solidarios con las pinzas (3) permanecen en su máxima extensión manteniendo las pinzas cerradas y el pistón superior (10) permanece en su máxima extensión, lo que asegura que el AUV esté completamente sumergido. Cuando el sistema se encuentra durante la maniobra de lanzado los pistones laterales solidarios con las pinzas (3) se cierran, dando lugar a la apertura de las pinzas y a la liberación del AUV y el pistón superior (10) permanece en su máxima extensión, lo que asegura que la maniobra no ponga en riesgo al AUV, que está completamente sumergido. Para subir el sistema hacia el USV, el pistón superior (10) se cierra, levantando la invención hasta una altura que permite que el AUV inicie sus propias maniobras sin riesgo y los pistones laterales solidarios con las pinzas (3) permanecen en su posición de menor extensión, lo que evita que las pinzas se cierren. Durante la maniobra de recuperación del AUV, con el USV sobre el AUV, el pistón superior (10) se abre al máximo, introduciendo el sistema en el agua, a una distancia que permite recoger el USV y los pistones solidarios con las pinzas (3) se abren hasta su máxima extensión, cerrando las pinzas sobre el cuerpo del AUV. La configuración del sistema objeto de la invención permite realizar las siguientes maniobras: a. fijar temporalmente un AUV (b) a la estructura de un USV (a) , permitiendo que todo el cuerpo del AUV (b) permanezca sumergido en todo momento, b. portar el AUV (b) dentro de la masa de agua mientras el USV (a) se desplaza sobre la misma con sus propios medios de propulsión, a rumbo GPS programado y apoyado por las redes de satélites (c) o de forma controlada desde una estación de control situada en tierra o a bordo de un barco de apoyo (d) , c. tomar datos del medio marino a través de los sensores del USV (a) mientras que el AUV (b) se encuentra soportado por este, sin entorpecer con el cuerpo del AUV (b) la recepción de datos o las maniobras necesarias a para la toma de los mismos, y hasta una profundidad (h1) determinada por las capacidades de estos sensores, d. tomar datos del medio marino a través de los sensores del AUV (b) , mientras este se encuentra fijo al USV (a) , sin que la presencia del USV (b) que lo porta entorpezca la recepción de datos, y hasta una profundidad (h2) determinada por las capacidades de estos sensores, e. lanzar en un punto predeterminado el AUV (b) que se encuentra fijado al USV (a) sin poner en riesgo la integridad de ninguno de los vehículos, ni las maniobras de navegación del AUV (b) una vez liberado, para que pueda bajar hasta la profundidad que determine su capacidad (h3) y trabaje de forma autónoma, f. recoger el AUV (b) cuando este haya finalizado su misión y se encuentre en superficie, para volver a fijarlo al USV (a) sin poner en riesgo la integridad de ninguno de los vehículos, ni las maniobras de navegación del USV (a) una vez que se haya fijado en AUV (b) . Como se ha indicado anteriormente en la descripción del grupo electrohidráulico y la bomba, así como en el caso de los pistones, los materiales del resto de componentes del sistema pueden variar en función del grado de protección a la humedad del que se quiera dotar. Con carácter ilustrativo y no limitativo, se indica que, en una realización del sistema: - Las pinzas (2.a y 2.b) , las piezas que conforman la caja del bloque central (1) , el sistema de anclaje (11) y los topes (8) se han construido a partir de plancha de aluminio naval Al-Mg AA5083, con un tratamiento de anodizado duro, lo que mejora sus propiedades frente a la corrosión y el desgaste. - Las barras (5) , (6) , (7) y (9) se han fabricado en acero inoxidable calidad AISI 316L. - La tornillería empleada ha sido de acero inoxidable calidad AISI 316L aisladas con teflón para evitar el contacto eléctrico con el aluminio.
Publicaciones:
ES2955225 (29/11/2023) - A1 Solicitud de patente con informe sobre el estado de la técnica
ES2955225 (05/04/2024) - B2 Patente de invención con examen
Eventos:
En fecha 21/04/2022 se realizó Registro Instancia de Solicitud
En fecha 22/04/2022 se realizó Admisión a Trámite
En fecha 22/04/2022 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 23/05/2022 se realizó Superado examen de oficio
En fecha 02/08/2022 se realizó Realizado IET
En fecha 05/08/2022 se realizó 1109P_Comunicación Traslado del IET
En fecha 19/09/2022 se realizó PETEX_Petición de examen sustantivo
En fecha 29/11/2023 se realizó Publicación Solicitud
En fecha 29/11/2023 se realizó Publicación Folleto Solicitud con IET (A1)
En fecha 15/03/2024 se realizó Validación petición y/o pago de examen sustantivo conforme
En fecha 19/03/2024 se realizó No existen objeciones a la concesión de la solicitud
En fecha 19/03/2024 se realizó Finalización de Examen Sustantivo
En fecha 19/03/2024 se realizó 6121P_Comunicación finalización de examen sustantivo
En fecha 25/03/2024 se realizó Publicación finalización de examen sustantivo
En fecha 27/03/2024 se realizó Concesión con examen sustantivo
En fecha 27/03/2024 se realizó Entrega título
En fecha 27/03/2024 se realizó 6125P_Notificación de concesión con examen sustantivo
En fecha 05/04/2024 se realizó Publicación concesión Patente
En fecha 05/04/2024 se realizó Publicación Folleto Concesión
Pagos:
21/04/2022 - Pago Tasas IET
Fuente de la información
Parte de la información aquí publicada es pública puesto que ha sido obtenida de la Oficina de Propiedad Industrial de los diferentes países el 29/04/2024 y por lo tanto puede ser que la información no esté actualizada.Parte de la información aquí mostrada ha sido calculada por nuestro sistema informático y puede no ser veraz.
Privacidad
Si considera que al información aquí publicada afecta a su privacidad y desea que eliminemos la información aquí publicada envíe un email a info@patentes-y-marcas.com o rellene el formulario que encontrará aquí.Información sobre el registro de patente nacional por SISTEMA RÍGIDO DE LANZAMIENTO Y RECUPERACIÓN DE UN VEHÍCULO AUTÓNOMO SUBMARINO DESDE UN VEHÍCULO AUTÓNOMO MARINO DE SUPERFICIE con el número P202230360
El registro de patente nacional por SISTEMA RÍGIDO DE LANZAMIENTO Y RECUPERACIÓN DE UN VEHÍCULO AUTÓNOMO SUBMARINO DESDE UN VEHÍCULO AUTÓNOMO MARINO DE SUPERFICIE con el número P202230360 fue solicitada el 21/04/2022. Se trata de un registro en España por lo que este registro no ofrece protección en el resto de países. El registro SISTEMA RÍGIDO DE LANZAMIENTO Y RECUPERACIÓN DE UN VEHÍCULO AUTÓNOMO SUBMARINO DESDE UN VEHÍCULO AUTÓNOMO MARINO DE SUPERFICIE con el número P202230360 fue solicitada por UNIVERSIDAD DE CÁDIZ. El registro [modality] por SISTEMA RÍGIDO DE LANZAMIENTO Y RECUPERACIÓN DE UN VEHÍCULO AUTÓNOMO SUBMARINO DESDE UN VEHÍCULO AUTÓNOMO MARINO DE SUPERFICIE con el número P202230360 está clasificado como B63B 35/40 según la clasificación internacional de patentes.
Otras invenciones solicitadas en la clasificación internacional de patentes B63B 35/40.
Es posible conocer invenciones similares al campo de la técnica se refiere. El registro de patente nacional por SISTEMA RÍGIDO DE LANZAMIENTO Y RECUPERACIÓN DE UN VEHÍCULO AUTÓNOMO SUBMARINO DESDE UN VEHÍCULO AUTÓNOMO MARINO DE SUPERFICIE con el número P202230360 está clasificado con la clasificación B63B 35/40 por lo que si se desea conocer más registros con la clasificación B63B 35/40 clicar aquí.Patentes en España
Es posible conocer todas las invenciones publicadas en España entre las que se encuentra el registro patente nacional por SISTEMA RÍGIDO DE LANZAMIENTO Y RECUPERACIÓN DE UN VEHÍCULO AUTÓNOMO SUBMARINO DESDE UN VEHÍCULO AUTÓNOMO MARINO DE SUPERFICIE. Nuestro portal www.patentes-y-marcas.com ofrece acceso a las publicaciones de patentes en España. Conocer las patentes registradas en un país es importante para saber las posibilidades de fabricar, vender o explotar una invención en España.Patentes registradas en la clase B
Es posible conocer todas las patentes registradas en la clase B (TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTE ) entre las que se encuentra la patente SISTEMA RÍGIDO DE LANZAMIENTO Y RECUPERACIÓN DE UN VEHÍCULO AUTÓNOMO SUBMARINO DESDE UN VEHÍCULO AUTÓNOMO MARINO DE SUPERFICIE con el número P202230360. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase B63
Es posible conocer todas las patentes registradas en la clase B63 (BUQUES U OTRAS EMBARCACIONES FLOTANTES; SUS EQUIPOS) entre las que se encuentra la patente SISTEMA RÍGIDO DE LANZAMIENTO Y RECUPERACIÓN DE UN VEHÍCULO AUTÓNOMO SUBMARINO DESDE UN VEHÍCULO AUTÓNOMO MARINO DE SUPERFICIE con el número P202230360. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase B63B
Es posible conocer todas las patentes registradas en la clase B63B (BUQUES U OTRAS EMBARCACIONES FLOTANTES; EQUIPAMIENTO PARA EMBARCACIONES) entre las que se encuentra la patente SISTEMA RÍGIDO DE LANZAMIENTO Y RECUPERACIÓN DE UN VEHÍCULO AUTÓNOMO SUBMARINO DESDE UN VEHÍCULO AUTÓNOMO MARINO DE SUPERFICIE con el número P202230360. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.
¿Tienes alguna duda?
Escribe tu consulta y te responderemos rápida y gratuitamente.

Otras patentes similares
 P202230357
P202230357
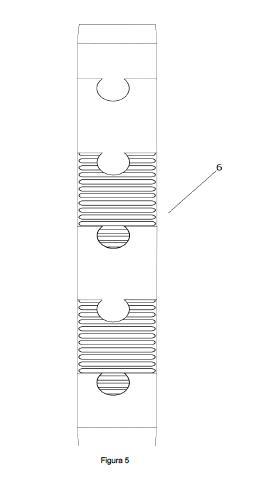
Profesionales Recomendados
Barcelona
933182440
España
933182440
España

Barcelona
+34 93 362 16 97
España
+34 93 362 16 97
España

Barcelona
932 593 600
España
932 593 600
España







