


- Home /
- Publicaciones de patentes /
- SISTEMA Y MÉTODO PARA LA GESTIÓN DE ALMACENES
Patente nacional por "SISTEMA Y MÉTODO PARA LA GESTIÓN DE ALMACENES"
Este registro ha sido solicitado por
ZEO TECHNOLOGY FOR INDUSTRY, S.L.
a través del representanteFELIPE FERNÁNDEZ POU
Contacto
- Estado: Vigente
- País:
- España
- Fecha solicitud:
- 25/11/2020
- Número solicitud:
-
P202031183
- Número publicación:
-
ES2912599
- Fecha de concesión:
-
18/11/2022
- Inventores:
-
Persona física
- Datos del titular:
-
ZEO TECHNOLOGY FOR INDUSTRY, S.L.
- Datos del representante:
-
Felipe Fernández Pou
- Clasificación Internacional de Patentes:
- G06Q 10/08
- Clasificación Internacional de Patentes de la publicación:
- G06Q 10/08
- Fecha de vencimiento:
Quiero registrar una patente

Reivindicaciones:
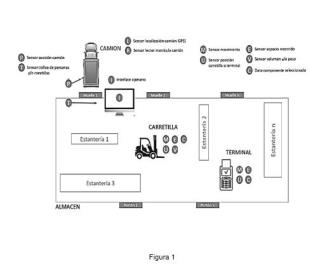
+ ES-2912599_A11. Sistema para la gestión de un almacén, donde el sistema comprende: - Al menos un sensor de presencia (P) de vehículos de transporte de mercancías, configurado para detectar si un vehículo de transporte de mercancías se encuentra ubicado en una ubicación de carga/descarga; - Al menos un sensor de tráfico (T) de elementos en movimiento, configurado para detectar el cruce de un elemento en movimiento en la ubicación de carga/descarga; - Al menos un procesador electrónico configurado para, para un proceso de carga o de descarga de bultos en la ubicación de carga/descarga, realizar: - Recibir la información capturada por el al menos un sensor (P) de presencia de transporte de mercancías y por el al menos un sensor (T) de tráfico de elementos en movimiento, a través de una red de telecomunicación; - A partir de la información recibida del al menos un sensor de presencia (P) , calcular el tiempo en el que la ubicación de carga/descarga está ocupada y a partir de la información recibida del al menos un sensor de tráfico (T) , mientras la ubicación de carga/descarga está ocupada, determinar el tiempo en que se está trabajando en la ubicación, Ttrabajando, y el tiempo en el que no se está trabajando en la ubicación, Tinactivo, donde está determinación comprende: - Mientras la información recibida del sensor de presencia (P) indica la presencia de un vehículo de transporte de mercancías en la ubicación de carga/descarga, si la diferencia de tiempo entre los momentos en que se producen dos detecciones consecutivas de cruce de algún elemento en movimiento del sensor de tráfico (T) , es menor que un umbral de tiempo predeterminado, se continua incrementando el Ttrabajando; si no, pasado el umbral de tiempo predeterminado, se comienza a incrementar el Tinactivo hasta que se reciba la siguiente señal de dicho sensor de tráfico (T) . ; - Cuando la información recibida del sensor de presencia (P) indica que se ha terminado la presencia del vehículo de transporte de mercancías en la ubicación de carga/descarga, se comienza a incrementar Tinactivo, hasta que llegue una nueva señal del sensor de presencia (P) ; - Obtener a partir de los tiempos calculados, uno o más parámetros de eficiencia del almacén. 2. Sistema según la reivindicación 1, donde el umbral de tiempo predeterminado es igual a un tiempo máximo de carga predeterminado si el proceso es de carga o un tiempo máximo de descarga predeterminado si el proceso es de descarga, más un tiempo de tolerancia predeterminado. 3. Sistema según la reivindicación 2, donde el tiempo máximo de carga predeterminado y el tiempo máximo predeterminado de descarga depende del tipo de bulto. 4. Sistema según cualquiera de las reivindicaciones anteriores, donde el umbral de tiempo predeterminado se obtiene a partir de parámetros de tiempo calculados a partir de la información recibida del al menos un sensor de tráfico (T) en reproducciones de situaciones de carga o descarga del vehículo de transporte de mercancías para cada tipo de bulto, en condiciones ideales. 5. Sistema según cualquiera de las reivindicaciones anteriores donde el umbral predeterminado se obtiene a partir de parámetros de tiempo calculados a partir de la información recibida del al menos un sensor de tráfico (T) en procesos de carga o descarga del vehículo de transporte de mercancías durante un periodo previo de tiempo determinado. 6. Sistema según cualquiera de las reivindicaciones anteriores donde el al menos un sensor (P) de presencia es de tipo inductivo o de tipo fotocélula y el al menos un sensor (T) de tráfico es de tipo fotocélula. 7. Sistema según cualquiera de las reivindicaciones anteriores, donde los parámetros de eficiencia del almacén calculados en cada momento son uno o más de los siguientes: - Eficiencia del proceso de carga, OEEcarga, calculado como: OEEcarga = ( (N° de bultos cargados) x (Ti_carga de cada bulto) ) / (Ttot_carga) ; siendo Ttot_carga el Tiempo Total empleado en la carga del vehículo de mercancías hasta el momento y Ti_carga el tiempo ideal de carga del tipo de bulto en cuestión medido en condiciones ideales u obtenido a partir de un histórico de datos de carga; - Disponibilidad del proceso de carga, DISPcarga, calculado como: DISPcarga = (Tcargando) / ( (Tcargando + Tparado) ) , donde "Tcargando" es la suma del tiempo en el estado "trabajando", Ttrabajando durante un periodo determinado y "Tparado" es la suma del tiempo en el estado "Sin Trabajar", Tinactivo durante el periodo determinado; - Eficiencia del proceso de descarga, OEEdescarga, calculado como: OEEdescarga = ( (N° de bultos descargados) x (Ti_descarga de cada bulto) ) / (Ttot_descarga) ; siendo Ttot_carga" el Tiempo Total empleado en la descarga del vehículo de mercancías hasta el momento y Ti_descarga el tiempo ideal de descarga del tipo de bulto en cuestión medido en condiciones ideales u obtenido a partir de un histórico de datos de descarga; - Disponibilidad del proceso de descarga, DISPdescarga, calculado como: DISPdescarga = (Tdescargando) / ( (Tdescargando + Tparado) ) , donde "Tcargando" es la suma del tiempo en el estado "trabajando", Ttrabajando durante el periodo determinado y "Tparado" es la suma del tiempo en el estado "Sin Trabajar", Tinactivo, durante el periodo determinado; 8. Sistema según cualquiera de las reivindicaciones anteriores, donde el al menos un procesador está además configurado para: - calcular el tiempo transcurrido desde que se detecta que un vehículo de transporte de mercancías entra en las instalaciones donde se encuentra el almacén hasta que un sensor de presencia (P) detecta que dicho vehículo de transporte de mercancías se encuentra ubicado en una ubicación de carga/descarga. 9. Sistema según la reivindicación 8, donde la detección de que un vehículo de transporte de mercancías entra en las instalaciones se obtiene a partir de información de un sensor de localización (L) ubicado en el vehículo de transporte de mercancías, a partir de un sensor lector de matrículas configurado para detectar la matrícula de vehículos de transporte de mercancías que entran en las instalaciones donde se encuentra el almacén o a partir de información introducida por un operario del almacén en un dispositivo electrónico a través de un interfaz de usuario. 10. Sistema según cualquiera de las reivindicaciones anteriores, donde el sistema además comprende: - Al menos un sensor de movimiento (M1) configurado para detectar cuando una carretilla de transporte de bultos del almacén, está parada o en movimiento y al menos un sensor de volumen y/o peso (V) configurado para detectar cuando una carretilla de transporte de bultos lleva carga o no y las características de volumen y/o peso transportado; - Donde el al menos un procesador electrónico está además configurado para recibir la información capturada por el al menos un sensor de movimiento (M1) y/o del al menos un sensor de volumen y/o peso (V) a través de la red de telecomunicación y determinar, a partir de esta información, el tiempo en que una carretilla de transporte de bultos está con carga y el volumen y/o peso que una carretilla transporta en cada momento, el tiempo en que una carretilla de transporte de bultos está parada y el tiempo en que una carretilla de transporte de bultos está en movimiento. 11. Sistema según la reivindicación 10, donde la causa de la parada de la carretilla de transporte de bultos se determina a partir de información de sensores o a partir de información introducida por un operario del almacén en un dispositivo electrónico a través de un interfaz de usuario. 12. Sistema según cualquiera de las reivindicaciones anteriores, donde el al menos un procesador electrónico está además configurado para determinar el espacio recorrido por una carretilla del almacén, a partir de información recibida a través de la red de telecomunicación de al menos un sensor de localización (U1) configurado para detectar la localización de una carretilla de transporte de bultos o de la información recibida a través de la red de telecomunicación de al menos un sensor de espacio recorrido (E1) configurado para detectar metros recorridos por una carretilla de transporte de bultos. 13. Sistema según cualquiera de las reivindicaciones anteriores, donde el sistema además comprende: - Al menos un sensor de movimiento (M2) configurado para detectar cuando un terminal de recogida/colocación de bultos del almacén está parado o en movimiento; - Donde el al menos un procesador electrónico está además configurado para recibir la información capturada por el al menos un sensor de movimiento (M2) a través de la red de telecomunicación y determinar, a partir de esta información, el tiempo en que un terminal de recogida/colocación de bultos está parado y el tiempo en que un terminal de recogida/colocación de bultos está en movimiento. 14. Sistema según la reivindicación 13, donde la causa de una parada en un terminal de recogida/colocación de bultos se determina a partir de información de sensores o de información introducida por un operario del almacén en un dispositivo electrónico a través de un interfaz de usuario. 15. Sistema según cualquiera de las reivindicaciones anteriores, donde el al menos un procesador electrónico está además configurado para determinar el espacio recorrido por un terminal de recogida/colocación de bultos del almacén, a partir de información recibida a través de la red de telecomunicación de al menos un sensor de localización (U2) configurado para detectar la localización de terminal de recogida/colocación de bultos o de la información recibida a través de la red de telecomunicación de al menos un sensor de espacio recorrido (E2) configurado para detectar metros recorridos por terminal de recogida/colocación de bultos. 16. Sistema según cualquiera de las reivindicaciones anteriores, donde el al menos un procesador electrónico está además configurado para asociar a cada tipo de bulto, los tiempos y/o parámetros calculados por el al menos un procesador electrónico, . 17. Sistema según cualquiera de las reivindicaciones anteriores, donde al menos un dispositivo electrónico presenta uno o más de los tiempos y/o parámetros calculados por el al menos un procesador electrónico, mediante un interfaz de usuario del dispositivo. 18. Sistema según cualquiera de las reivindicaciones anteriores, donde los parámetros calculados por al menos un dispositivo electrónico se relacionan automáticamente con los datos del componente (C) que recoge o coloca una carretilla o terminal. 19. Método para la gestión de un almacén, donde el método comprende para un proceso de carga o de descarga de bultos en una ubicación de carga/descarga del almacén, los siguientes pasos realizados por uno o más procesadores electrónicos: a) Recibir la información capturada por al menos un sensor (P) de presencia de transporte de mercancías a través de una red de telecomunicación, donde el al menos un sensor de presencia (P) de vehículos de transporte de mercancías está configurado para detectar si un vehículo de transporte de mercancías se encuentra ubicado en la ubicación de carga/descarga b) Recibir la información capturada por al menos un sensor (T) de tráfico de elementos en movimiento, a través de la red de telecomunicación, donde el al menos un sensor de tráfico (T) de elementos en movimiento está configurado para detectar el cruce de un elemento en movimiento en la ubicación de carga/descarga; c) A partir de la información recibida del al menos un sensor de presencia (P) , calcular el tiempo en el que la ubicación de carga/descarga está ocupada y a partir de la información recibida del al menos un sensor de tráfico (T) , determinar dentro de ese tiempo, el tiempo en que se está trabajando en la ubicación, Ttrabajando, y el tiempo en el que no se está trabajando en la ubicación, Tinactivo, mediante los siguientes pasos: c1) Mientras la información recibida del sensor de presencia (P) indica la presencia de un vehículo de transporte de mercancías en la ubicación de carga/descarga, si la diferencia de tiempo entre los momentos en que se producen dos detecciones consecutivas de cruce de algún elemento en movimiento del sensor de tráfico (T) , es menor que un umbral de tiempo predeterminado, se continua incrementando el Ttrabajando; si no, pasado el umbral de tiempo predeterminado, se comienza a incrementar el Tinactivo hasta que se reciba la siguiente señal de dicho sensor de tráfico (T) ; c2) Cuando la información recibida del sensor de presencia (P) indica que se ha terminado la presencia del vehículo de transporte de mercancías en la ubicación de carga/descarga, se comienza a incrementar Tinactivo, hasta que llegue una nueva señal del sensor de presencia (P) . d) Obtener a partir de los tiempos calculados, uno o más parámetros de eficiencia del almacén. 20. Un producto de programa de ordenador que comprende instrucciones ejecutables por ordenador para realizar el procedimiento según cualquiera de la reivindicación 18, cuando el programa es ejecutado en un ordenador.
+ ES-2912599_B21. Sistema para la gestión de un almacén, donde el sistema comprende: - Al menos un sensor de presencia (P) de vehículos de transporte de mercancías, configurado para detectar si un vehículo de transporte de mercancías se encuentra ubicado en una ubicación de carga/descarga; - Al menos un sensor de tráfico (T) de elementos en movimiento, configurado para detectar el cruce de un elemento en movimiento en la ubicación de carga/descarga; - Al menos un procesador electrónico configurado para, para un proceso de carga o de descarga de bultos en la ubicación de carga/descarga, realizar: - Recibir la información capturada por el al menos un sensor (P) de presencia de transporte de mercancías y por el al menos un sensor (T) de tráfico de elementos en movimiento, a través de una red de telecomunicación; - A partir de la información recibida del al menos un sensor de presencia (P) , calcular el tiempo en el que la ubicación de carga/descarga está ocupada y a partir de la información recibida del al menos un sensor de tráfico (T) , mientras la ubicación de carga/descarga está ocupada, determinar el tiempo en que se está trabajando en la ubicación, Ttrabajando, y el tiempo en el que no se está trabajando en la ubicación, Tinactivo, donde está determinación comprende: - Mientras la información recibida del sensor de presencia (P) indica la presencia de un vehículo de transporte de mercancías en la ubicación de carga/descarga, si la diferencia de tiempo entre los momentos en que se producen dos detecciones consecutivas de cruce de algún elemento en movimiento del sensor de tráfico (T) , es menor que un umbral de tiempo predeterminado, se continua incrementando el Ttrabajando; si no, pasado el umbral de tiempo predeterminado, se comienza a incrementar el Tinactivo hasta que se reciba la siguiente señal de dicho sensor de tráfico (T) . ; - Cuando la información recibida del sensor de presencia (P) indica que se ha terminado la presencia del vehículo de transporte de mercancías en la ubicación de carga/descarga, se comienza a incrementar Tinactivo, hasta que llegue una nueva señal del sensor de presencia (P) ; - Obtener a partir de los tiempos calculados, uno o más de los siguientes parámetros de eficiencia del almacén: - Eficiencia del proceso de carga, OEEcarga, calculado como: OEEcarga = ( (N° de bultos cargados) x (Ti_carga de cada bulto) ) / (Ttot_carga) ; siendo Ttot_carga el Tiempo Total empleado en la carga del vehículo de mercancías hasta el momento y Ti_carga el tiempo ideal de carga del tipo de bulto en cuestión medido en condiciones ideales u obtenido a partir de un histórico de datos de carga; - Disponibilidad del proceso de carga, DISPcarga, calculado como: DISPcarga = (Tcargando) / ( (Tcargando + Tparado) ) , donde "Tcargando" es la suma del tiempo en el estado "trabajando", Ttrabajando durante un periodo determinado y "Tparado" es la suma del tiempo en el estado "Sin Trabajar", Tinactivo durante el periodo determinado; - Eficiencia del proceso de descarga, OEEdescarga, calculado como: OEEdescarga = ( (N° de bultos descargados) x (Ti_descarga de cada bulto) (Ttot_descarga) ; siendo Ttot_carga" el Tiempo Total empleado en la descarga del vehículo de mercancías hasta el momento y Ti_descarga el tiempo ideal de descarga del tipo de bulto en cuestión medido en condiciones ideales u obtenido a partir de un histórico de datos de descarga; - Disponibilidad del proceso de descarga, DISPdescarga, calculado como: DISPdescarga = (Tdescargando) / ( (Tdescargando + Tparado) ) , donde "Tcargando" es la suma del tiempo en el estado "trabajando", Ttrabajando durante el periodo determinado y "Tparado" es la suma del tiempo en el estado "Sin Trabajar", Tinactivo, durante el periodo determinado; 2. Sistema según la reivindicación 1, en el que los parámetros de eficiencia del almacén se obtienen monitorizando, al menos, uno de los siguientes factores: - el tráfico de personas y carretillas en la ubicación de carga o descarga; - el tráfico de vehículos de transporte interno (carretillas) ; - el proceso de funcionamiento de los terminales manuales de datos (picking) . 3. Sistema según las reivindicaciones anteriores, donde el umbral de tiempo predeterminado es igual a un tiempo máximo de carga predeterminado si el proceso es de carga o un tiempo máximo de descarga predeterminado si el proceso es de descarga, más un tiempo de tolerancia predeterminado. 4. Sistema según la reivindicación 3, donde el tiempo máximo de carga predeterminado y el tiempo máximo predeterminado de descarga depende del tipo de bulto. 5. Sistema según cualquiera de las reivindicaciones anteriores, donde el umbral de tiempo predeterminado se obtiene a partir de parámetros de tiempo calculados a partir de la información recibida del al menos un sensor de tráfico (T) en reproducciones de situaciones de carga o descarga del vehículo de transporte de mercancías para cada tipo de bulto, en condiciones ideales. 6. Sistema según cualquiera de las reivindicaciones anteriores donde el umbral predeterminado se obtiene a partir de parámetros de tiempo calculados a partir de la información recibida del al menos un sensor de tráfico (T) en procesos de carga o descarga del vehículo de transporte de mercancías durante un periodo previo de tiempo determinado. 7. Sistema según cualquiera de las reivindicaciones anteriores donde el al menos un sensor (P) de presencia es de tipo inductivo o de tipo fotocélula y el al menos un sensor (T) de tráfico es de tipo fotocélula. 8. Sistema según cualquiera de las reivindicaciones anteriores, donde el al menos un procesador está además configurado para calcular el tiempo transcurrido desde que se detecta que un vehículo de transporte de mercancías entra en las instalaciones donde se encuentra el almacén hasta que un sensor de presencia (P) detecta que dicho vehículo de transporte de mercancías se encuentra ubicado en una ubicación de carga/descarga. 9. Sistema según la reivindicación 8, donde la detección de que un vehículo de transporte de mercancías entra en las instalaciones se obtiene a partir de información de un sensor de localización (L) ubicado en el vehículo de transporte de mercancías, a partir de un sensor lector de matrículas configurado para detectar la matrícula de vehículos de transporte de mercancías que entran en las instalaciones donde se encuentra el almacén o a partir de información introducida por un operario del almacén en un dispositivo electrónico a través de un interfaz de usuario. 10. Sistema según cualquiera de las reivindicaciones anteriores, donde el sistema, además, comprende: - Al menos un sensor de movimiento (M1) configurado para detectar cuando una carretilla de transporte de bultos del almacén está parada o en movimiento y al menos un sensor de volumen y/o peso (V) configurado para detectar cuando una carretilla de transporte de bultos lleva carga o no y las características de volumen y/o peso transportado; - Donde el al menos un procesador electrónico está además configurado para recibir la información capturada por el al menos un sensor de movimiento (M1) y/o del al menos un sensor de volumen y/o peso (V) a través de la red de telecomunicación y determinar, a partir de esta información, el tiempo en que una carretilla de transporte de bultos está con carga y el volumen y/o peso que una carretilla transporta en cada momento, el tiempo en que una carretilla de transporte de bultos está parada y el tiempo en que una carretilla de transporte de bultos está en movimiento. 11. Sistema según la reivindicación 10, donde la causa de la parada de la carretilla de transporte de bultos se determina a partir de información de sensores o a partir de información introducida por un operario del almacén en un dispositivo electrónico a través de un interfaz de usuario. 12. Sistema según cualquiera de las reivindicaciones anteriores, donde el al menos un procesador electrónico está además configurado para determinar el espacio recorrido por una carretilla del almacén, a partir de información recibida a través de la red de telecomunicación de al menos un sensor de localización (U1) configurado para detectar la ocalización de una carretilla de transporte de bultos o de la información recibida a través de la red de telecomunicación de al menos un sensor de espacio recorrido (E1) configurado para detectar metros recorridos por una carretilla de transporte de bultos. 13. Sistema según cualquiera de las reivindicaciones anteriores, donde el sistema además comprende: - Al menos un sensor de movimiento (M2) configurado para detectar cuando un terminal de recogida/colocación de bultos del almacén está parado o en movimiento; - Donde el al menos un procesador electrónico está además configurado para recibir la información capturada por el al menos un sensor de movimiento (M2) a través de la red de telecomunicación y determinar, a partir de esta información, el tiempo en que un terminal de recogida/colocación de bultos está parado y el tiempo en que un terminal de recogida/colocación de bultos está en movimiento. 14. Sistema según la reivindicación 13, donde la causa de una parada en un terminal de recogida/colocación de bultos se determina a partir de información de sensores o de información introducida por un operario del almacén en un dispositivo electrónico a través de un interfaz de usuario. 15. Sistema según cualquiera de las reivindicaciones anteriores, donde el al menos un procesador electrónico está además configurado para determinar el espacio recorrido por un terminal de recogida/colocación de bultos del almacén, a partir de información recibida a través de la red de telecomunicación de al menos un sensor de localización (U2) configurado para detectar la localización de terminal de recogida/colocación de bultos o de la información recibida a través de la red de telecomunicación de al menos un sensor de espacio recorrido (E2) configurado para detectar metros recorridos por terminal de recogida/colocación de bultos. 16. Sistema según cualquiera de las reivindicaciones anteriores, donde el al menos un procesador electrónico está además configurado para asociar a cada tipo de bulto, los tiempos y/o parámetros calculados por el al menos un procesador electrónico. 17. Sistema según cualquiera de las reivindicaciones anteriores, donde al menos un dispositivo electrónico presenta uno o más de los tiempos y/o parámetros calculados por el al menos un procesador electrónico, mediante un interfaz de usuario del dispositivo. 18. Sistema según cualquiera de las reivindicaciones anteriores, donde los parámetros calculados por al menos un dispositivo electrónico se relacionan automáticamente con los datos del componente (C) que recoge o coloca una carretilla o terminal. 19. Método para la gestión de un almacén, donde el método comprende para un proceso de carga o de descarga de bultos en una ubicación de carga/descarga del almacén, los siguientes pasos realizados por uno o más procesadores electrónicos: a) Recibir la información capturada por al menos un sensor (P) de presencia de transporte de mercancías a través de una red de telecomunicación, donde el al menos un sensor de presencia (P) de vehículos de transporte de mercancías está configurado para detectar si un vehículo de transporte de mercancías se encuentra ubicado en la ubicación de carga/descarga b) Recibir la información capturada por al menos un sensor (T) de tráfico de elementos en movimiento, a través de la red de telecomunicación, donde el al menos un sensor de tráfico (T) de elementos en movimiento está configurado para detectar el cruce de un elemento en movimiento en la ubicación de carga/descarga; c) A partir de la información recibida del al menos un sensor de presencia (P) , calcular el tiempo en el que la ubicación de carga/descarga está ocupada y a partir de la información recibida del al menos un sensor de tráfico (T) , determinar dentro de ese tiempo, el tiempo en que se está trabajando en la ubicación, Ttrabajando, y el tiempo en el que no se está trabajando en la ubicación, Tinactivo, mediante los siguientes pasos: c1) Mientras la información recibida del sensor de presencia (P) indica la presencia de un vehículo de transporte de mercancías en la ubicación de carga/descarga, si la diferencia de tiempo entre los momentos en que se producen dos detecciones consecutivas de cruce de algún elemento en movimiento del sensor de tráfico (T) , es menor que un umbral de tiempo predeterminado, se continua incrementando el Ttrabajando; si no, pasado el mbral de tiempo predeterminado, se comienza a incrementar el Tinactivo hasta que se reciba la siguiente señal de dicho sensor de tráfico (T) ; c2) Cuando la información recibida del sensor de presencia (P) indica que se ha terminado la presencia del vehículo de transporte de mercancías en la ubicación de carga/descarga, se comienza a incrementar Tinactivo, hasta que llegue una nueva señal del sensor de presencia (P) . d) Obtener a partir de los tiempos calculados, uno o más parámetros de eficiencia del almacén. 20. Un producto de programa de ordenador que comprende instrucciones ejecutables por ordenador para realizar el procedimiento según cualquiera de la reivindicación 18, cuando el programa es ejecutado en un ordenador.
Los productos y servicios protegidos por este registro son:
G06Q 10/08
Descripciones:
+ ES-2912599_A1 SISTEMA Y MÉTODO PARA LA GESTIÓN DE ALMACENES CAMPO TÉCNICO DE LA INVENCIÓN La presente invención se refiere al campo de la gestión y organización de almacenes donde se reciben, se guardan y se distribuyen productos o material de cualquier tipo, es decir, pertenecientes a cualquier sector (automoción, textil, químico, farmacéutico, de construcción o cualquier otro) . Más concretamente, la presente invención propone un sistema y un método que permite una mejora sustancial en la eficiencia del funcionamiento de dichos almacenes, mediante una gestión de los mismos basada en un tratamiento y procesado optimizado de información recogida por distintos sensores de monitorización de la actividad en dichos almacenes. ANTECEDENTES DE LA INVENCIÓN La gestión de almacenes donde se guardan gran cantidad de productos es una tarea compleja, ya que en un almacén se realizan numerosas actividades (carga, descarga, almacenamiento de productos, extracción de productos, identificación de los mismos, transporte de los productos dentro del almacén...) , muchas veces de manera simultánea. Es importante el control de todas estas actividades para que se realicen correctamente y en el menor tiempo posible, de manera que el almacén funcione de la manera más rápida, eficiente y correcta posible. En la actualidad, los almacenes se gestionan de manera rudimentaria, en la mayor parte de los casos de manera manual y cuando se hace de manera digitalizada y automatizada, no se realiza de forma eficiente. Hay que tener en cuenta, que en general, en estos almacenes los productos cambian constantemente, así como las cantidades y ubicaciones de los mismos, por lo que en la mayoría de los casos no existen patrones de comportamiento. Así algunos de los problemas que se pueden encontrar actualmente en los almacenes son, entre otros: - Los camiones (o cualquier otro vehículo que se use para transporte de productos) ocupan demasiado tiempo el muelle de carga/descarga del almacén, debido por ejemplo al tiempo ue se tarda en cargar o descargar los productos o al tiempo que tarda el camión en posicionarse en el muelle. Esto causa una utilización no eficiente de los muelles (o portones o similares) de carga/descarga del almacén; haciendo que el número de camiones que se carga/descarga en un determinado muelle durante el día sea bajo. - Las carretillas (o cualquier otro vehículo de transporte interno en el almacén) , tardan demasiado en el transporte de los productos debido por ejemplo a que no está optimizado la distancia que deben recorrer o porque no pueden transportar suficiente cantidad de productos. - Algo similar pasa con los terminales de colocación y recogida de objetos en las estanterías (denominados por el término inglés "picking") que tardan demasiado en la recogida o colocación de cada producto. Por todos estos problemas (y otros que no se han citado aquí) en la actualidad la gestión de almacenes se realiza de manera poco eficiente. Por esta razón, existe la necesidad de un procedimiento y sistema de gestión de almacenes que solucione todos estos problemas y que, en general, permita una gestión de almacenes eficiente, rápida y que implique ahorro de recursos. SUMARIO DE LA INVENCIÓN El objetivo de la presente invención es el de desarrollar un sistema y método de gestión (y monitorización) de almacenes mediante uno o varios sensores de monitorización y uno o varios algoritmos de procesado, que permiten obtener parámetros para la mejora de la eficiencia de algunos de los recursos más relevantes de un almacén y, en general, que mejoran la eficiencia en la gestión del almacén resolviendo, entre otros los problemas anteriormente expuestos. La presente invención puede aplicarse a cualquier tipo de almacén que almacena cualquier tipo de objetos, tanto de propósito logístico (almacenes logísticos, receptores y distribuidores de productos, pertenecientes estos a cualquier sector: automoción, textil, químico, farmacéutico, etc.) como de propósito industrial (almacenes internos de una determinada fábrica, o externos a la misma, que realizan la recepción y distribución de productos o componentes a cualquier proceso industrial) . Con el método y sistema propuesto, se pueden conseguir las siguientes ventajas técnicas, entre otras: • En los muelles de carga de los almacenes (o portones o similar) : reducción de los tiempos de utilización. Los camiones serán cargados o descargados en menos tiempo, por lo que los muelles podrán ser utilizados por más camiones en el mismo tiempo. • En los camiones (u otros vehículos similares) reducción de los tiempos de carga y descarga de los productos, así como de las ineficiencias asociadas a dichos procesos. • Reducción de los tiempos de posicionamiento de los camiones en los muelles; esto es, del tiempo que tarda el camión en llegar y posicionarse en el muelle asignado. • En las carretillas (o vehículos similares) , reducción de los tiempos de transporte y de los espacios recorridos, aumento de los volúmenes y pesos transportados, así como reducción de otras ineficiencias asociadas a dichos procesos. • En los terminales manuales de recogida/colocación de objetos ("picking" o similar) si los hubiera, reducción del tiempo empleado durante la recogida/colocación y de los espacios recorridos por los terminales, así como de otras ineficiencias asociadas a dichos procesos. En un primer aspecto, la presente invención propone un sistema para la gestión de un almacén, donde el sistema comprende: - Al menos un sensor de presencia (P) de vehículos de transporte de mercancías (por ejemplo, camiones) , configurado para detectar si un vehículo de transporte de mercancías se encuentra (correctamente) ubicado en una ubicación de carga/descarga (por ejemplo, un muelle o portón) ; - Al menos un sensor de tráfico (T) de elementos en movimiento, configurado para detectar el cruce de un elemento en movimiento (por ejemplo, una persona o una carretilla) en la ubicación de carga/descarga; - Al menos un procesador electrónico configurado para, en un proceso de carga o de descarga de bultos (de un tipo o tipos determinados) y en la ubicación de carga/descarga, realizar: - Recibir la información capturada por el al menos un sensor (P) de presencia de transporte de mercancías y por el al menos un sensor (T) de tráfico de elementos en movimiento, a través de una red de telecomunicación; - A partir de la información recibida del al menos un sensor de presencia (P) , calcular el tiempo en el que la ubicación de carga/descarga está ocupada y a partir de la información recibida del al menos un sensor de tráfico (T) , mientras la ubicación de carga/descarga está ocupada, determinar el tiempo en que se está trabajando en la ubicación, Ttrabajando, y el tiempo en el que no se está trabajando en la ubicación, Tinactivo, donde esta determinación comprende: - Mientras la información recibida del sensor de presencia (P) indica la presencia de un vehículo de transporte de mercancías en la ubicación de carga/descarga, si la diferencia de tiempo entre los momentos en que se producen dos detecciones consecutivas de cruce de algún elemento en movimiento del sensor de tráfico (T) , es menor que un umbral de tiempo predeterminado, se continua incrementando el Ttrabajando; si no, pasado el umbral de tiempo predeterminado, se comienza a incrementar el Tinactivo hasta que se reciba la siguiente señal de dicho sensor de tráfico (T) . ; - Cuando la información recibida del sensor de presencia (P) indica que se ha terminado la presencia del vehículo de transporte de mercancías en la ubicación de carga/descarga, se comienza a incrementar Tinactivo, hasta que llegue una nueva señal del sensor de presencia (P) ; - Obtener a partir de los tiempos calculados, uno o más parámetros de eficiencia del almacén. El umbral de tiempo predeterminado puede ser un tiempo máximo de carga predeterminado si el proceso es de carga o un tiempo máximo de descarga predeterminado si el proceso es de descarga, más un tiempo de tolerancia predeterminado; el tiempo máximo de carga o de descarga puede depender del tipo de bulto. El umbral de tiempo predeterminado se puede obtener a partir de parámetros de tiempo calculados a partir de la información recibida del al menos un sensor de tráfico (T) en eproducciones de situaciones de carga o descarga de un vehículo de transporte de mercancías para cada tipo de bulto, en condiciones ideales. También se puede obtener a partir de parámetros de tiempo calculados a partir de la información recibida del al menos un sensor de tráfico (T) en situaciones reales de carga o descarga de un vehículo de transporte de mercancías durante un periodo previo de tiempo determinado. El al menos un sensor (P) de presencia puede ser de tipo inductivo o de tipo fotocélula y el sensor (T) de tráfico puede ser de tipo fotocélula. Los parámetros de eficiencia del almacén calculados en cada momento pueden ser uno o más de los siguientes (esto es un ejemplo y otros parámetros de eficiencia pueden usarse) : - Eficiencia del proceso de carga, OEEcarga, calculado como: OEEcarga = ( (N° de bultos cargados) x (Ti_carga de cada bulto) ) / (Ttot_carga) ; siendo Ttot_carga el Tiempo Total empleado en la carga del vehículo de mercancías hasta el momento y Ti_carga el tiempo ideal de carga del tipo de bulto en cuestión medido en condiciones ideales u obtenido a partir de un histórico de datos de carga; - Disponibilidad del proceso de carga, DISPcarga, calculado como: DISPcarga = (Tcargando) / ( (Tcargando + Tparado) ) , donde "Tcargando" es la suma del tiempo en el estado "trabajando", Ttrabajando durante un periodo determinado y "Tparado" es la suma del tiempo en el estado "Sin Trabajar", Tinactivo durante el periodo determinado; - Eficiencia del proceso de descarga, OEEdescarga, calculado como: OEEdescarga = ( (N° de bultos descargados) x (Ti_descarga de cada bulto) ) / (Ttot_descarga) ; siendo Ttot_descarga" el Tiempo Total empleado en la descarga del vehículo de mercancías hasta el momento y Ti_descarga el tiempo ideal de descarga del tipo de bulto en cuestión medido en condiciones ideales u obtenido a partir de un histórico de datos de descarga; - Disponibilidad del proceso de descarga, DISPdescarga, calculado como: DISPdescarga = (Tdescargando) / ( (Tdescargando + Tparado) ) , donde "Tdescargando" es la suma del tiempo en el estado "trabajando", Ttrabajando durante el periodo determinado y "Tparado" es la suma del tiempo en el estado "Sin Trabajar", Tinactivo, durante el periodo determinado; En una realización, el al menos un procesador está además configurado para: - calcular el tiempo transcurrido desde que se detecta que un vehículo de transporte de mercancías entra en las instalaciones donde se encuentra el almacén hasta que un sensor de presencia (P) detecta que dicho vehículo de transporte de mercancías se encuentra ubicado en una ubicación de carga/descarga. La detección de que un vehículo de transporte de mercancías entra en las instalaciones se puede obtener a partir de información de un sensor de localización (L) ubicado en el vehículo de transporte de mercancías, a partir de un sensor lector de matrículas configurado para detectar la matrícula de vehículos de transporte de mercancías que entran en las instalaciones donde se encuentra el almacén o a partir de información introducida por un operario del almacén en un dispositivo electrónico a través de un interfaz de usuario. El sistema además puede comprender: - Al menos un sensor de movimiento (M1) configurado para detectar cuando una carretilla de transporte de bultos del almacén, está parada o en movimiento y al menos un sensor de volumen y/o peso (V) configurado para detectar cuando una carretilla de transporte de bultos lleva carga o no y las características de volumen y/o peso transportado; - Donde el al menos un procesador electrónico está además configurado para recibir la información capturada por el al menos un sensor de movimiento (M1) y/o del al menos un sensor de volumen y/o peso (V) a través de la red de telecomunicación y determinar, a partir de esta información, el tiempo en que una carretilla de transporte de bultos está con carga y el volumen y/o peso que una carretilla transporta en cada momento, el tiempo en que una carretilla de transporte de bultos está parada y el tiempo en que una carretilla de transporte de bultos está en movimiento. El al menos un procesador electrónico puede estar además configurado para determinar el espacio recorrido por una carretilla del almacén, a partir de información recibida a través de la red de telecomunicación de al menos un sensor de localización (U1) configurado para detectar la localización de una carretilla de transporte de bultos o de la información recibida a través de la red de telecomunicación de al menos un sensor de espacio recorrido (E1) configurado para detectar metros recorridos por una carretilla de transporte de bultos. En una realización, el sistema además comprende: - Al menos un sensor de movimiento (M2) configurado para detectar cuando un terminal de recogida/colocación de bultos del almacén está parado o en movimiento; - Donde el al menos un procesador electrónico está además configurado para recibir la información capturada por el al menos un sensor de movimiento (M2) a través de la red de telecomunicación y determinar, a partir de esta información, el tiempo en que un terminal de recogida/colocación de bultos está parado y el tiempo en que un terminal de recogida/colocación de bultos está en movimiento. La causa de la parada de la carretilla de transporte de bultos o del terminal de recogida/colocación de bultos se puede determinar a partir de información de sensores o a partir de información introducida por un operario del almacén en un dispositivo electrónico a través de un interfaz de usuario. El al menos un procesador electrónico puede estar además configurado para determinar el espacio recorrido por un terminal de recogida/colocación de bultos del almacén, a partir de información recibida a través de la red de telecomunicación de al menos un sensor de localización (U2) configurado para detectar la localización de terminal de recogida/colocación de bultos o de la información recibida a través de la red de telecomunicación de al menos un sensor de espacio recorrido (E2) configurado para detectar metros recorridos por terminal de recogida/colocación de bultos. El al menos un procesador electrónico puede estar además configurado para asociar a cada tipo de bulto, los tiempos y/o parámetros calculados por el al menos un procesador electrónico. Al menos un dispositivo electrónico puede presentar a un usuario, uno o más de los tiempos y/o parámetros calculados por el al menos un procesador electrónico, mediante un interfaz de usuario del dispositivo (mediante gráficos, tablas, o cualquier otro tipo de formato) . En un segundo aspecto, la presente invención propone un método para la gestión de un almacén, donde el método comprende para un proceso de carga o de descarga de bultos en una ubicación de carga/descarga del almacén, los siguientes pasos realizados por uno o más procesadores electrónicos: a) Recibir la información capturada por al menos un sensor (P) de presencia de transporte de mercancías a través de una red de telecomunicación, donde el al menos un sensor de presencia (P) de vehículos de transporte de mercancías está configurado para detectar si un vehículo de transporte de mercancías se encuentra ubicado en la ubicación de carga/descarga b) Recibir la información capturada por al menos un sensor (T) de tráfico de elementos en movimiento, a través de la red de telecomunicación, donde el al menos un sensor de tráfico (T) de elementos en movimiento está configurado para detectar el cruce de un elemento en movimiento en la ubicación de carga/descarga; c) A partir de la información recibida del al menos un sensor de presencia (P) , calcular el tiempo en el que la ubicación de carga/descarga está ocupada y a partir de la información recibida del al menos un sensor de tráfico (T) , determinar dentro de ese tiempo, el tiempo en que se está trabajando en la ubicación, Ttrabajando, y el tiempo en el que no se está trabajando en la ubicación, Tinactivo, mediante los siguientes pasos: c1) Mientras la información recibida del sensor de presencia (P) indica la presencia de un vehículo de transporte de mercancías en la ubicación de carga/descarga, si la diferencia de tiempo entre los momentos en que se producen dos detecciones consecutivas de cruce de algún elemento en movimiento del sensor de tráfico (T) , es menor que un umbral de tiempo predeterminado, se continua incrementando el Ttrabajando; si no, pasado el umbral de tiempo predeterminado, se comienza a incrementar el Tinactivo hasta que se reciba la siguiente señal de dicho sensor de tráfico (T) ; c2) Cuando la información recibida del sensor de presencia (P) indica que se ha terminado la presencia del vehículo de transporte de mercancías en la ubicación de carga/descarga, se comienza a incrementar Tinactivo, hasta que llegue una nueva señal del sensor de presencia (P) . d) Obtener a partir de los tiempos calculados, uno o más parámetros de eficiencia del almacén. Finalmente, en un tercer aspecto de la invención se presenta un programa de ordenador que comprende instrucciones ejecutables por ordenador para implementar el método descrito, al jecutarse en el sistema. Dichas instrucciones pueden estar almacenadas en un medio de almacenamiento de datos digitales. Para un entendimiento más completo de la invención, sus objetos y ventajas, puede tenerse referencia a la siguiente memoria descriptiva y a los dibujos adjuntos. DESCRIPCIÓN DE LOS DIBUJOS Para complementar la descripción que se está realizando y con objeto de ayudar a una mejor comprensión de las características de la invención, de acuerdo con unos ejemplos preferentes de realizaciones prácticas de la misma, se acompaña como parte integrante de esta descripción un juego de dibujos en donde, con carácter ilustrativo y no limitativo, se ha representado lo siguiente: La Figura 1 muestra de manera esquemática un almacén donde se aplica el sistema y método propuesto de acuerdo a una realización de la invención. DESCRIPCIÓN DETALLADA DE LA INVENCIÓN La presente invención propone un sistema y método para la gestión de un almacén, basado en sensores de monitorización y en el procesado de los datos obtenidos de dichos sensores (aplicando determinados algoritmos) . La presente invención es aplicable a cualquier tipo de almacén (o más generalmente hablando, instalación de almacenamiento) que puede almacenar cualquier tipo de objetos: cualquier tipo de material o productos de cualquier tipo como componentes, alimentos, fármacos, telas...o cualquier otro tipo de objeto. La figura 1 muestra esquemáticamente (a modo de ejemplo no limitativo) un almacén (1) genérico donde se puede aplicar el método y sistema de la presente invención. En dicho almacén hay N estanterías (11...1N, con N>=1) , o en general N estructuras de cualquier tipo donde se pueden almacenar objetos. El almacén también dispone de una o más ubicaciones de carga y descarga (muelles, portones.o cualquier tipo de instalación donde se realice la carga y/o descarga de objetos para su salida y/o entrada respectivamente, en el almacén) . En el ejemplo de la figura 1, existen 3 muelles y 2 portones (esto es solo un ejemplo, el número de muelles y portones son parámetros propios de cada almacén) a través de los cuales los vehículos (20) de carga/descarga (generalmente camiones) cargarán o descargarán los bjetos, y una o más carretillas (30) de transporte de bultos. Con el término genérico de carretillas, nos referimos a cualquier vehículo que se use para el transporte interno de los bultos dentro del almacén o de las instalaciones (es decir, para desplazar los objetos o bultos por el interior del almacén desde el camión a las estanterías en el caso de la descarga o desde las estanterías al camión en el caso de carga o incluso entre camiones) . El almacén también puede disponer de uno o más terminales (40) para realizar la recogida o la colocación de los objetos (individuales o normalmente agrupados en bultos) en las estanterías (llamados terminales de "picking", usando el término inglés) . Como se ve en la figura 1, se pueden disponer de varios sensores para capturar distintos tipos de datos relacionados con recursos del almacén y, en general, datos del funcionamiento del almacén. En la figura 1 aparecen varios tipos de sensores pero no todos son obligatorios en todos las realizaciones de la invención (es decir, se pueden usar opcionalmente uno o varios tipos de los sensores que aparecen en la figura 1, dependiendo de la realización de la invención) . Los datos de los distintos sensores usados se recogen por uno o más dispositivos electrónicos (llamados genéricamente, dispositivos de recogida de datos) y, generalmente, se almacenan en una o más bases de datos para su procesado en uno o más procesadores electrónicos (mediante uno o más algoritmos que se expondrán más adelante) para mejorar la eficiencia de la gestión del almacén. Estos dispositivos de recogida de datos pueden formar parte de los dispositivos electrónicos de explotación (de los que se hablará más adelante) o pueden no formar parte de ellos sino enviarle a su vez los datos, a través de cualquier red de telecomunicación, a los dispositivos electrónicos de explotación. Algunos de los distintos sensores que se pueden usar son (esto es solo un ejemplo no limitativo, se pueden usar otro tipo de sensores y no es obligatorio el uso de todos los tipos de sensores que se exponen a continuación) : - Uno o más sensores (P) para detectar la posición/presencia de un camión (en general, de cualquier vehículo de transporte de mercancías) en una ubicación de carga/descarga (por ejemplo, un muelle o portón) . Puede ser, por ejemplo, del tipo fotocélula, inductivo, o de cualquier otro tipo. Con este sensor se detecta si un camión está ubicado en la ubicación de carga/descarga (muelle/portón) de manera correcta, es decir, listo para cargar o descargar. La información capturada por dicho sensor se enviará al dispositivo de recogida de datos del almacén, mediante cualquier tipo de red de telecomunicaciones (cableada o inalámbrica) . - Uno o más sensores (T) de tráfico de personas o carretillas (o más genéricamente, de elementos en movimiento) en cada ubicación de carga/descarga, para detectar si se está cargando o descargando el camión (o generalmente hablando el vehículo de transporte de mercancías) . Este sensor puede ser de tipo fotocélula o de cualquier otro tipo. Cada vez que cruce un elemento en movimiento (por ejemplo, una persona o carretilla) hacia el interior/exterior del camión, se detectará dicho cruce, por ejemplo, cortando el haz de luz de la fotocélula. El procesado de los datos recogidos por este sensor (mediante un algoritmo que se explicará más adelante) permite detectar cuándo se está cargando/ descargando el camión, conforme se explica más adelante. La información capturada por dicho sensor se enviará al dispositivo de recogida de datos del almacén, mediante cualquier tipo de red de telecomunicaciones (cableada o inalámbrica) . - Uno o más sensores (L) para detectar la localización de cada camión. Este sensor puede ser por ejemplo del tipo de Sistema de Posicionamiento Global (GPS de sus siglas en inglés) o de cualquier otro tipo. Típicamente irá ubicado en el vehículo de transporte de mercancías (típicamente un camión) ; el vehículo enviará la información de dicho sensor al dispositivo de recogida de datos del almacén, mediante cualquier tipo de red de telecomunicaciones (cableada o inalámbrica) . - Uno o más sensores (R) para leer la matrícula de los vehículos de transporte de mercancías que van a realizar carga/descarga en el almacén. Este sensor puede estar situado en cada uno de los muelles o en las puertas de entrada de en las instalaciones donde se encuentra el almacén, detectando la matrícula de los vehículos (camiones) que entran en dichas instalaciones. La información capturada por dicho sensor se enviará al dispositivo de recogida de datos del almacén, mediante cualquier tipo de red de telecomunicaciones (cableada o inalámbrica) . - Uno o más sensores de movimiento (M1) , preferiblemente colocados en cada una de las carretillas para detectar cuándo una carretilla está parada o en movimiento. También se pueden usar sensores de movimiento (M2) , preferiblemente cada uno de los terminales de recogida/colocación (terminales de "picking") , para monitorizar su movimiento (y detectar cuándo el terminal está parado o en movimiento) . - Uno o más sensores de volumen y/o peso colocado en cada una de las carretillas (V) para detectar cuándo cada carretilla lleva carga o no, las características de volumen y/o peso transportado, así como cuando carga o descarga sus bultos (u objetos) . La información capturada por dicho sensor se enviará al dispositivo de recogida de datos del almacén, mediante cualquier tipo de red de telecomunicaciones (cableada o inalámbrica) . - Uno o más sensores de localización para detectar la localización de cada carretilla (U1) o de cada terminal de recogida/colocación (U2) . Este sensor puede ser por ejemplo del tipo de Sistema de Posicionamiento Global (GPS de sus siglas en inglés) o de cualquier otro tipo. Este sensor típicamente irá ubicado en cada carretilla o terminal, que puede enviar la información de dicho sensor (por ejemplo, en tiempo real) al dispositivo de recogida de datos del almacén (y de ahí al dispositivo de explotación sino es el mismo) , mediante cualquier tipo de red de telecomunicaciones (cableada o inalámbrica) .. - Uno o más sensores de espacio recorrido para calcular metros recorridos por cada carretilla (E1) o terminal de recogida/colocación (E2) . En una realización, este sensor no es necesario como tal, sino que a partir de la información recogida por cada sensor de localización (U1, U2) , se calculan los metros recorridos por cada carretilla o terminal. En una realización el sistema se compone de dos tipos de elementos fundamentales, por un lado, los sensores (uno o más de los expuestos anteriormente) y, por otro los dispositivos electrónicos de explotación de la información monitorizada por los sensores. Dichos dispositivos electrónicos de explotación pueden ser cualquier dispositivo con uno o más procesadores electrónicos de cualquier tipo (por ejemplo, un servidor, un smartphone o de cualquier otro tipo) donde se recogen/reciben esos datos, se almacenan permanente o temporalmente (en bases de datos externas o internas al dispositivo) y se procesan (mediante uno o más algoritmos que se expondrán más adelante) . La comunicación entre los diferentes elementos podrá realizarse de forma cableada o inalámbrica (mediante comunicación WiFi, Bluetooth, ZigBee, telefonía móvil GSM, 3G, 4G, 5G...o cualquier otro tipo de comunicación inalámbrica) a través de cualquier tipo de red de telecomunicación. Los sensores deben poder comunicarse con uno o más dispositivos electrónicos (llamados de recogida de datos) a los que envían las señales que capturan (usando cualquier tipo de ecnología de comunicación alámbrica o inalámbrica, como se ha explicado anteriormente) ; estos dispositivos electrónicos que recogen los datos de los sensores, se comunicarán con el procesador o procesadores de los dispositivos electrónicos de explotación que procesan dichos datos para enviarles dichos datos para su procesado o, en una realización alternativa, el mismo dispositivo electrónico que recoge los datos (es decir, el que recibe la información de los sensores) es el que se encarga de procesarlos. Hay que destacar que los datos se obtienen de los sensores, preferiblemente, en tiempo real. En una realización, uno o más de los sensores también se pueden comunicar entre sí mediante cualquier tipo de comunicación por cable o inalámbrica. Los dispositivos de explotación de los datos (aunque por concisión, se habla solo en plural, puede haber uno o más de un dispositivo de explotación de datos) pueden ubicarse dentro o fuera del almacén o incluso en la nube. Estos dispositivos dispondrán de (o tendrán comunicación con) una o varias bases de datos que contendrán la información recogida por los distintos sensores. En una realización, se propone mejorar la eficiencia de un almacén, mejorando los tiempos y eficiencia de las ubicaciones de carga y descarga, por ejemplo, consiguiendo una mejora de la tasa de ocupación de dichas ubicaciones (por ejemplo, muelles o portones) y una reducción de los tiempos de carga y descarga; mediante la obtención de parámetros que definen el comportamiento de dichos procesos. Para ello se realizan las siguientes tareas, en uno o más procesadores electrónicos del dispositivo de explotación de los datos (éste es un ejemplo no limitativo y no todas las tareas son obligatorias) : - Recibir los datos capturados por el sensor (P) de posición del camión (o cualquier otro vehículo de transporte de mercancías) en la ubicación de carga/descarga y el sensor (T) de detección tráfico de personas y/o carretillas. Aunque se está suponiendo que hay un sensor P y un sensor T por ubicación de carga/descarga (por muelle o portón) , en general puede haber más de un sensor P y más de un sensor T por muelle o portón. O incluso haber muelles o portones del almacén donde no existan estos sensores. - Para cada ubicación de carga/descarga (por ejemplo, muelle o portón) , gracias a la información recibida del sensor P, se computará el tiempo en el que no se detecta ningún camión (o más generalmente hablando ningún vehículo de transporte de mercancías) en dicha bicación (estado "sin camión", es decir, sin ocupar) y el tiempo en el que se detecta algún camión en dicha ubicación (estado "con camión", es decir ocupada) . - Dentro del estado "con camión" se distinguirá el tiempo en el que el sensor T detecta tráfico (en el que se considerará que se está cargando/descargando el camión, es decir se está trabajando en la carga/descarga) y el tiempo en el que el sensor T no detecta tráfico (en el que se considerará que el muelle o portón está ocupado pero no se está cargando/descargando, es decir, no se está trabajando en la carga/descarga) . El procesado de los datos del sensor T para detectar los estados de trabajo y no trabajo, se explicará más adelante. - Los parámetros de tiempo de ocupación de cada ubicación, tiempo de trabajo y tiempo de ocupación sin trabajar son importantes para mejorar la eficiencia de cada muelle o portón (cada ubicación de entrada/salida) . Como los datos de los sensores se obtienen en tiempo real, el valor de estos parámetros se obtiene en tiempo real, lo que permite una reactividad inmediata en la mejora continua de ineficiencias. Estos valores también se pueden almacenar en bases de datos para su análisis histórico. - Se puede usar también un parámetro de Eficiencia del proceso de carga (o Eficiencia global del equipo, OEE, del inglés Overall Equipment Effectiveness) que, en una realización se calcularía del siguiente modo: OEEcarga = ( (N° de objetos cargados) x (Ti_carga de cada objeto) ) / (Ttot_carga) u OEEcarga = ( (N° de bultos cargados) x (Ti_carga de cada bulto) ) / (Ttot_carga) , si los parámetros se determinan para cada bulto; siendo "Ttot_carga" el Tiempo Total empleado en la carga del camión hasta el momento y Ti_carga el tiempo ideal de carga de cada objeto/bulto. En el caso de la Eficiencia del proceso de descarga, se calcularía en una realización de la siguiente forma: OEEdescarga = ( (N° de objetos descargados) x (Ti_descarga de cada objeto) ) / (Ttot_descarga) u OEEdescarga = ( (N° de bultos descargados) x (Ti_descarga de cada bulto) ) / (Ttot_descarga) , si los parámetros se determinan para cada bulto; siendo "Ttot_descarga" el Tiempo Total empleado en la descarga del camión hasta el momento y Ti_descarga el tiempo ideal de descarga de cada objeto/bulto. Este parámetro OEE permitirá predecir cuándo se va a terminar de cargar el camión, dado que mide y compara en tiempo real cómo se está ejecutando realmente el proceso de carga o descarga respecto al tiempo ideal. En una realización este tiempo ideal, se obtiene midiendo el proceso de carga o descarga en condiciones ideales; en una realización alternativa este tiempo ideal, se obtiene a partir de un histórico de los tiempos de carga o descarga en condiciones reales (por ejemplo, la media de los tiempos de carga o descarga registrados durante un determinado tiempo o la media de los tiempos de carga o descarga registrados durante un determinado tiempo quitando los casos donde ha habido algún problema) . - Se puede usar también un parámetro de Disponibilidad del proceso de carga (DISP_carga) que, en una realización se calcularía del siguiente modo: DISP = (Tcargando) / ( (Tcargando + Tparado) ) donde "Tcargando" es el tiempo total en que hay camión en el muelle y éste se está cargando (la suma del tiempo en el estado "trabajando", Ttrabajando, durante un periodo determinado) y "Tparado" es el tiempo en que hay camión, pero éste no se está cargando (la suma del tiempo en el estado "Sin Trabajar", Tinactivo, durante un periodo determinado) . En el caso del proceso de descarga, se puede usar también Disponibilidad del proceso de descarga (DISP_descarga) que, en una realización se calcularía del siguiente modo DISP = (Tdescargando) / ( (Tdescargando + Tparado) ) donde "Tdescargando" es el tiempo total en que hay camión en el muelle y éste se está descargando (la suma del tiempo en el estado "trabajando", Ttrabajando) y "Tparado" es el tiempo en que hay camión, pero éste no se está descargando (la suma del tiempo en el estado "Sin Trabajar", Tinactivo) . - Mediante la obtención de estos parámetros de tiempo de ocupación de cada ubicación, tiempo de trabajo y tiempo de ocupación sin trabajar (y opcionalmente otros derivados de éstos, como Eficiencia del proceso o Disponibilidad) se puede mejorar la eficiencia de cada muelle o portón (cada ubicación de entrada/salida) y del almacén en general. Así, por ejemplo, si estos parámetros tienen valores considerados bajos (comparados con un umbral o con el funcionamiento histórico del almacén o de otros almacenes similares) , se pueden variar diversos factores de diseño y/o funcionamiento del almacén (como número de estanterías, número de carretillas u operarios, distancia entre los muelles y la estantería, tipo de carretillas, ubicación de los objetos en la estantería...) que hagan que mejoren estos parámetros. Por ejemplo, ante un cambio en uno de los factores, se pueden medir estos parámetros para ver ómo ha variado su valor y decidir si ese cambio ha mejorado la eficiencia (y por lo tanto ha de mantenerse) o ha empeorado la eficiencia y, por lo tanto, ha de revocarse. - El dispositivo de explotación de datos, puede presentar está información al usuario (mediante un interfaz de usuario) en cualquier formato. Por ejemplo, en una gráfica puede indicarle los periodos del día en que cada ubicación de carga/descarga está sin ocupar ("sin camión") , ocupada sin trabajar ("con camión sin trabajar") u ocupada trabajando ("trabajando") ; o la cantidad de tiempo en que se está en cada uno de estos estados. Así se podría mostrar en una gráfica el log o sucesión de estados (sin camión, trabajando o sin trabajar) y tiempos de cada estado en el eje temporal o el Pareto de estados, con tiempos y número de repeticiones de cada estado (se mostrará un Pareto con 3 barras verticales, representando los 3 estados distintos) . Esto es solo un ejemplo, y cualquier otro tipo de gráficas se pueden usar. Esta misma información se puede dar en forma de tabla o texto, en vez de o adicionalmente a, gráficamente. - En la siguiente tabla (Tabla 1) , se muestra a modo de ejemplo, una posible presentación al usuario (por ejemplo, mediante una interfaz de usuario) de los datos y parámetros de los que se han hablado anteriormente. Así, en el ejemplo de esta tabla se muestran los estados y tiempos agregados, en este caso por turno y un indicador de eficiencia de carga/descarga (en este caso, las disponibilidad %Disp) del muelle, como relación entre los tiempos trabajando y el tiempo total (tiempo total que ha estado el camión en el muelle = Ttrabajando+TInactivo o de parada) . Tabla 1 A continuación, se explicará cómo se procesan los datos provenientes del sensor (o sensores) T de tráfico de personas o carretillas en la ubicación de carga/descarga (muelle, portón ...) en una realización a modo de ejemplo no limitativo. Aunque por concisión y simplicidad, se explicará el procesado principalmente en referencia a la carga del camión, la misma es aplicable al proceso de descarga. Lo único hay que tener en cuenta que los valores de ejemplo de los parámetros mencionados a continuación para los procesos de carga y descarga pueden y suelen ser diferentes. - Lógicamente, la frecuencia con la que las carretillas/personas circulan hacia el interior/exterior del camión depende del tipo y tamaño de objetos/bultos que transporte el camión, de la longitud del camión, del tipo de carretilla utilizado, de la persona/personas que realizan dicha carga o descarga, de la distancia entre el camión y las estructuras de almacenamiento (estanterías) , etc.. A modo de ejemplo, puede haber cargas que generen una señal del sensor "T" detectando la presencia de una persona o carretilla en el muelle cada 30 segundos, otros cada 3 minutos, otros cada 8 minutos, etc. - Se calcula un Tiempo Ideal de carga, Ti, para cada bulto que se carga en el almacén en sus diferentes condiciones. Por bulto, se entiende un conjunto de objetos agrupados y que, por lo tanto, se cargan o descargan de una vez (normalmente porque es el número de objetos que vienen empaquetados juntos) . Para calcular dicho tiempo ideal, se puede reproducir la situación de carga del camión en condiciones ideales (sin obstáculos o problemas que perjudiquen al proceso de carga) . En estas circunstancias, el sensor T mide los tiempos reales de cada carga individual y los envía (directamente o a través de un equipo de recogida de datos) al dispositivo de explotación o a la base de datos. Como se ha explicado, en base a estos datos medidos en cada carga individual (en condiciones ideales) , el algoritmo desarrollado calcula, por ejemplo, el tiempo mínimo de carga (Tmin) , el tiempo máximo de carga (Tmax) y el Tiempo medio de carga (Tmed) de cada bulto. En una realización, el tiempo medio de carga en condiciones ideales es lo que se tomará como Tiempo Ideal de carga, Ti. También se pueden calcular otros valores estadísticos como por ejemplo la Desviación media o la Varianza o cualquier otro. Tmin, Tmax, Tmed y Ti serán asociados al sensor "T" de cada ubicación de carga/descarga (y, preferiblemente, de cada tipo de objeto) , relacionados con la frecuencia de circulación (de una persona o de una carretilla en la tarea de carga) , con el tipo de bultos transportados por el camión, etc. Esta parametrización proporciona enorme flexibilidad y fiabilidad de la información. En una realización, estos parámetros (Tmin, Tmax, Tmed, Ti...) se pueden actualizar con el histórico de valores reales del tiempo de carga medidos durante un cierto periodo de tiempo anterior. - En una realización, para determinar cuándo se está cargando un camión, se utilizará el tiempo "Tmax", al que se añadirá un Tiempo de Tolerancia "Ttol" (este parámetro "Ttol" es configurable) . Por ejemplo, si se considera un bulto tiene un tiempo de carga "Tmax" de 100 segundos; se creará un parámetro Tiempo de Referencia (también llamado umbral de tiempo) de carga "Tref", que será la suma de "Tmax" más "Ttol": "Tref" = ("Tmax" + "Ttol") . Si se define por ejemplo un "Ttol" del 20% (20 segundos en este caso) , obtendremos un "Tref" de 120 segundos (estos valores, son solo ejemplos ilustrativos; y se pueden usar cualesquiera otros valores) . De este modo, al "Tmax" obtenido midiéndolo en condiciones ideales, se aplica una tolerancia "Ttol" configurable (por ejemplo, a través de una aplicación software en el dispositivo de explotación) y se obtiene el "Tref" como suma de ambos (esto es solo un ejemplo, y este tiempo de referencia o umbral se puede determinar de muchas otras formas) . - En una realización, durante la carga de un camión, tras una señal de cruce (de una persona o de una carretilla) del sensor T, se esperará a ver si se produce otra señal del sensor "T". Si se produce otra señal de cruce antes de que pase el tiempo de referencia Tref (en este caso de ejemplo 120 segundos) , se resetea el contador a 0 y se espera a la siguiente señal de cruce antes de ese Tref. Durante todo este tiempo se considera que se está cargando (modo trabajando, es decir, se está incrementando el contador Ttrabajando) . Es decir, mientras que el tiempo transcurrido entre dos señales de cruce consecutivas sea menor que Tref, se considera que se está cargando el camión y por lo tanto se está trabajando y todo el tiempo ranscurrido se irá computando como de modo "trabajando". Se está suponiendo que el sensor P ha detectado la señal de que el muelle está ocupado (si el muelle no está ocupado, no puede haber carga o descarga, por lo que típicamente no se analizan las señales provenientes del sensor T en ese periodo) . En el momento en que no se produce otra señal de cruce antes de "T ref", a partir ese momento se registrará un modo que indica que la carga del camión está Parado (modo "Sin trabajar" o "Inactivo") , y se mantendrá este modo hasta que se produzca una nueva señal de este sensor "T" (es decir, se está incrementando el contador Tinactivo) o hasta que el sensor P informe de que el camión ya no ocupa la ubicación de carga/descarga (es decir, el camión se ha ido y se ha terminado el proceso de carga/descarga) . Estas Paradas (periodos en los que no se obtiene una señal de cruce procedente del sensor T) pero hay un camión en el muelle, pueden tener una duración variable y su causa puede ser registrada, en algunos casos automáticamente (por ejemplo mediante sensores que detectan la causa de la parada) o en otros casos gracias a la declaración de un operario, por ejemplo a través de un dispositivo electrónico (llamado Interface de Operario, dispositivo "I" en la figura 1) con una interface de usuario que permite al operario introducir que ha habido una parada y su causa. Aunque en la figura 1 sólo se muestra un Interface de Operario, esto es solo un ejemplo y puede haber más de uno (o ninguno, si no se estima necesario) . Causas típicas de este tipo de paradas son, por ejemplo: Falta de los objetos de carga (están sin preparar, siniestro, verificaciones, retraso ruta previa) ; averías (avería de máquina, avería del muelle, cambio de batería, avería de sistema informático, siniestro en la carga/descarga, avería scanner...) ; paradas relacionadas con recursos (falta de carretilla, problemas de posicionamiento de camión en muelle, retraso de camión, camión en pausa, falta de operario, falta de scanner.) . Mientras se esté produciendo la carga del camión (modo "Trabajando") se puede medir exactamente el tiempo de carga exacto de cada bulto (por ejemplo 149" o 154" o cualquier otro) , que permitirá además hacer cálculos estadísticos por bulto, como medias, desviaciones, etc., y compararlas con los tiempos predefinidos. El tiempo entre señales del sensor T se corresponde con el tiempo de carga del bulto. A modo de ejemplo no limitativo, el tiempo de carga de del bulto puede medirse, al menos, de las siguientes maneras: • Si sólo utilizamos una fotocélula como sensor T, la primera señal se produce cuando entra a cargar el primer bulto, la segunda señal cuando sale a buscar el segundo bulto y la tercera señal cuando vuelve a cargar el segundo bulto, y así sucesivamente; el tiempo entre la primera y la tercera señal es el tiempo total de carga del segundo bulto, desglosado en 2 partes: tiempo de ir a buscarlo al almacén y tiempo de depositarlo en el camión) • Si, por ejemplo, el sensor T lo forman 2 fotocélulas, una detrás de la otra, podemos saber el sentido del tráfico, si se está entrando o saliendo del camión/muelle; el tiempo de carga de un bulto se corresponde con dos entradas consecutivas. El uso de 2 fotocélulas consecutivas como en el ejemplo anterior, además de servir para medir el tiempo de carga, proporciona también información sobre el sentido del tráfico e incluso la velocidad a la que se desplaza la carretilla/operario, con objeto de medirla y optimizarla. - En la explicación anterior se ha considerado que para determinar "Tmin", "Tmax" y "Tmed", entre otros parámetros, se mide realmente, en condiciones ideales el proceso de carga del camión. Aunque esto es lo ideal, no tiene por qué ser necesario; así en una realización, estos parámetros se pueden ir midiendo y calculando en condiciones reales desde la primera carga. Así, por ejemplo, el "Tmin" puede considerarse el tiempo mínimo de carga registrado a lo largo del tiempo anterior; el "Tref" podrá ser inicialmente varias veces el "Tmin" (típicamente 3 veces) , lo que permitirá medir y calcular inicialmente el "Tmed", automáticamente descontando las paradas largas; una vez se tenga el "Tmin" y el "Tmed", podremos calcular el "Tmax", que equidistará del "Tmed" lo mismo que "Tmin". Una vez se disponga de este "Tmax" real, se podrá calcular un "Tref" más ajustado a la realidad que el considerado inicialmente, aplicando el parámetro configurable "Ttol" (típicamente el 20% aunque puede tomar cualquier otro valor) . Esto es solo un ejemplo, y se pueden usar otros algoritmos para el cálculo de "Tmin", "Tmax" y "Tmed" a partir de las medidas en tiempo real. Además, en una realización, se propone mejorar la eficiencia del almacén, en concreto mejorando los tiempos de posicionamiento del camión en el muelle o portón mediante la obtención de parámetros que afectan a dicho proceso. Para ello se realizan las siguientes areas, en uno o más procesadores electrónicos (éste es un ejemplo no limitativo y no todas las tareas son obligatorias) : - Detección del momento de llegada del vehículo de carga/descarga (camión) al almacén o a las instalaciones donde se encuentra el almacén. Esto se puede hacer de numerosas maneras: Por ejemplo, mediante la información recibida del sensor L que nos indica la localización del camión, mediante la información recibida del sensor R que nos indica que un determinado camión (cuya matrícula ha leído) ha llegado a las instalaciones o mediante un empleado (por ejemplo, una persona de la oficina o guarda de seguridad o cualquier operario) que ve el camión y lo indica al dispositivo de explotación de datos (por ejemplo, mediante una aplicación informática realizada para ello en cualquier dispositivo electrónico o mediante el dispositivo de interfaz operario) . - Detección del momento en el que el camión llega a la ubicación de carga/descarga mediante la lectura del sensor P situado en dicha ubicación. - Obtener la diferencia entre los dos tiempos anteriores indicará el tiempo que ha tardado el camión en posicionarse en el muelle. Si el valor de este parámetro es muy alto, se pueden cambiar factores de diseño del almacén para mejorarlo. - Gracias a los sensores que se utilizan, se conoce en todo momento la ocupación de las ubicaciones de carga/descarga, por lo que cuando se detecta que el camión llega a las instalaciones se le puede indicar automáticamente (por ejemplo, mediante un mensaje a un dispositivo de usuario del conductor del camión) a qué muelle/portón debe dirigirse, lo que agiliza el posicionamiento del camión al muelle y reduce el tiempo de no ocupación de los muelles. Adicionalmente, mediante la tecnología GPS o similar, el sistema también conoce la posición del camión fuera de las instalaciones, por ejemplo, cuando se encuentra a una determinada distancia de las mismas, por lo que puede gestionar con antelación a qué muelle va a dirigir al camión e incluso acelerar o detener la carga/descarga en algún muelle para desocuparlo, o mandar desocupar uno de los muelles si la carga/descarga ha terminado y aún sigue ocupado. Esto son solo ejemplos (no limitativos) de acciones que se pueden tomar a partir de la determinación de estos parámetros y que permiten una mejor utilización de los recursos y, por lo tanto, una mejora en la gestión del almacén. En una realización, se propone además mejorar la eficiencia del almacén, en concreto mejorando la utilización y eficiencia de los vehículos de transporte interno (carretillas) , por ejemplo, consiguiendo una reducción de los tiempos de transporte, del espacio que tienen que recorrer, optimizando los volúmenes y pesos transportados...; mediante la obtención de parámetros que afectan a dicho proceso (transporte en carretillas) . Para ello se realizan las siguientes tareas, en uno o más procesadores electrónicos (éste es un ejemplo no limitativo y no todas las tareas son obligatorias) : - Detección del estado de movimiento o parada de cada carretilla. Preferiblemente esto se realiza a partir de la información recibida del sensor de movimiento (M1) de la carretilla, mediante el cual se conocerá si la carretilla está en movimiento o parada. La causa del paro de la carretilla se podrá detectar en algunos casos automáticamente (por ejemplo mediante sensores que detectan la causa de la parada) o en otros casos gracias a la declaración de un operario, por ejemplo a través de un dispositivo electrónico (Interface de Operario "I") que permite a un operario del almacén introducir que ha habido una parada y su causa. - Detección de si cada carretilla lleva carga o no, las características de lo que transporta (volumen y/o peso) así como cuando carga o descarga los bultos que transporta (es decir, cuando una carretilla pasa de estar sin carga a estar con carga o viceversa) . Preferiblemente esto se realiza a partir de la información recibida del sensor de volumen (V) de la carretilla - Determinación de la localización de una o más carretillas, preferiblemente mediante la información recibida de su sensor de localización (U1) que permiten conocer la localización de una carretilla. - Determinación de la distancia (por ejemplo, los metros) recorrida por cada carretilla en cada modo (transportando bultos o en vacío) . Esta determinación se puede hacer a partir de la información recibida de sensores específicos (E1) que miden el espacio recorrido por cada carretilla o, alternativamente, a partir de la información de localización de cada carretilla en cada momento recogida por cada sensor de localización U1. - Todos los parámetros determinados (estado de movimiento y carga de cada carretilla, localización de la misma, espacio recorrido.) se pueden relacionar automáticamente con el tipo de objeto o bulto que se trata, o más en concreto con los datos que describen los objetos o bultos tratados, llamado datos del componente (C en la figura 1) . Estos datos se obtienen eneralmente de la base de datos de información del almacén. En una realización, esta información sobre los objetos o bultos almacenados se obtienen del llamado Sistema de Planificación de Recursos Empresariales (ERP de sus siglas en inglés) del almacén. - La determinación de estos parámetros permite conocer en todo momento las características del proceso de transporte de cada carretilla, como por ejemplo, el estado de movimiento y carga de cada carretilla, localización de la misma o el espacio recorrido por cada una de ellas en un periodo de tiempo. Esto permite mejorar la eficiencia de la utilización de cada carretilla y del almacén en general. Así por ejemplo, si se detecta que una carretilla está mucho tiempo sin carga, se puede destinar durante ese tiempo a la descarga de otro camión; o si se detecta que una carretilla recorre mucho espacio se puede asignar a una tarea de transporte en otro muelle o a otra estantería, que haga que la distancia recorrida sea menor...Esto son solo ejemplos (no limitativos) , de acciones que se pueden tomar a partir de la determinación de estos parámetros y que permiten una mejor utilización de los recursos y, por lo tanto, una mejora en la gestión del almacén. En una realización, se propone además mejorar la eficiencia del almacén, en concreto mejorando la utilización y eficiencia de los terminales manuales de recogida/colocación de bultos u objetos (llamados terminales de "picking") , por ejemplo, consiguiendo una reducción de los tiempos empleados durante la recogida/colocación y de los espacios recorridos por los terminales de transporte.; mediante la obtención de parámetros que afectan al proceso de funcionamiento de dichos terminales. Para ello se realizan las siguientes tareas, en uno o más procesadores electrónicos (éste es un ejemplo no limitativo y no todas las tareas son obligatorias) : - Detección del estado de movimiento o parada de cada terminal. Preferiblemente esto se realiza a partir de la información recibida del sensor de movimiento (M2) del terminal, mediante el cual se conocerá si está en movimiento o parado. La causa del paro del terminal se podrá detectar en algunos casos automáticamente (por ejemplo mediante sensores que detectan la causa de la parada) o en otros casos gracias a la declaración de un operario, por ejemplo, a través de un dispositivo electrónico (Interface de Operario que permite a un operario del almacén introducir que ha habido una parada y su causa. - Determinación de la localización de una o más terminales, preferiblemente mediante la información recibida de su sensor de localización (U2) que permiten conocer la localización de un terminal. - Determinación de la distancia (por ejemplo, los metros) recorrida por cada terminal para la recogida/colocación de cada bulto concreto. Esta determinación se puede hacer a partir de la información recibida de sensores específicos (E2) que miden el espacio recorrido por cada terminal o, alternativamente, a partir de la información de localización de cada terminal en cada momento recogida por cada sensor de localización U2. - Todos los parámetros determinados (estado de movimiento de cada terminal, localización del mismo, espacio recorrido...) se pueden relacionar automáticamente con el tipo de objeto o bulto que recoge o coloca el terminal, o más en concreto con los datos que describen los objetos o bultos seleccionados por el terminal, llamado datos del componente (C en la figura 1) . Así, por ejemplo, se podría obtener la frecuencia con la que se recoge o coloca (y, por lo tanto, la de carga o descarga) cada objeto o bulto. Estos datos de componente se obtienen generalmente de la base de datos de información del almacén. En una realización, esta información sobre los objetos o bultos almacenados se obtienen del llamado Sistema de Planificación de Recursos Empresariales (ERP de sus siglas en inglés) del almacén. La captura de datos del componente (C en la figura 1) juega un papel importante en aquellos supuestos en los que el terminal o carretilla no disponga de sensores de movimiento M, ni de posición U, ni de espacio recorrido E, pero sí estén conectados al ERP, ya que esto permitirá conocer en tiempo real cada vez que el terminal o la carretilla recoge o coloca el bulto; por tanto, siguiendo la misma descripción que para el caso de la carga/descarga de camiones, nos permitirá saber si están trabajando Ttrabajando o inactivos Tinactivo, y medir su Tmin, Tmax, Tmed, Tref, Disp, OEE, etc. Cuando se producen 2 capturas de datos de (C) dentro de un umbral de tiempo, se considera que el terminal está trabajando, Ttrabajando; si no, se considera que está parado, Tinactivo. - La determinación de estos parámetros permite conocer en todo momento las características del proceso de transporte de cada terminal, como por ejemplo, el estado de movimiento de cada terminal, localización del mismo, espacio recorrido por cada terminal en un periodo de tiempo, frecuencia de carga o descarga de cada b u lto .. Esto permite mejorar la eficiencia de la utilización de cada terminal y del almacén en general. Así por ejemplo, si se detecta que un terminal está mucho tiempo sin moverse, se puede destinar durante ese tiempo a otra stantería (si son movibles) ; o si se detecta que un terminal recorre mucho espacio, se pueden recolocar los objetos en las estanterías de manera que la distancia recorrida por cada terminal sea menor...Esto son solo ejemplos (no limitativos) , de acciones que se pueden tomar a partir de la determinación de estos parámetros y que permiten una mejor utilización de los recursos y, por lo tanto, una mejora en la gestión del almacén. En este texto, el término "comprende" y sus derivaciones (como "comprendiendo", etc.) no deben entenderse en un sentido excluyente, es decir, estos términos no deben interpretarse como excluyentes de la posibilidad de que lo que se describe y define pueda incluir más elementos, etapas, etc. La presente invención se puede aplicar en cualquier tipo de instalaciones donde se realice almacenaje de objetos de cualquier tipo. Algunas realizaciones preferidas de la invención se describen en las reivindicaciones dependientes que se incluyen seguidamente. Descrita suficientemente la naturaleza de la invención, así como la manera de realizarse en la práctica, hay que hacer constar la posibilidad de que sus diferentes partes podrán fabricarse en variedad de materiales, tamaños y formas, pudiendo igualmente introducirse en su constitución o procedimiento, aquellas variaciones que la práctica aconseje, siempre y cuando las mismas, no alteren el principio fundamental de la presente invención. Esta descripción detallada se aporta para ayudar a un entendimiento completo de la invención. Por lo tanto, los expertos en la materia reconocerán que variaciones, cambios o modificaciones de las realizaciones descritas aquí pueden llevarse a cabo sin salir del ámbito de protección de la invención. También, la descripción de funciones y elementos sobradamente conocidos se omiten por claridad y concisión. La descripción y los dibujos simplemente ilustran los principios de la invención. Por lo tanto, debe apreciarse que los expertos en la técnica podrán concebir varias disposiciones que, aunque no se hayan descrito o mostrado explícitamente en este documento, representan los principios de la invención y están incluidas dentro de su alcance. Además, todos los ejemplos descritos en este documento se proporcionan principalmente por motivos pedagógicos para ayudar al lector a entender los principios de la invención y los conceptos aportados por el (los) inventor (es) para mejorar la técnica, y deben considerarse como no limitativos con respecto a tales ejemplos y condiciones descritos de manera specífica. Además, todo lo expuesto en este documento relacionado con los principios, aspectos y realizaciones de la invención, así como los ejemplos específicos de los mismos, abarcan equivalencias de los mismos. Aunque la presente invención se ha descrito con referencia a realizaciones específicas, los expertos en la técnica deben entender que los anteriores y diversos otros cambios, omisiones y adiciones en la forma y el detalle de las mismas pueden realizarse sin apartarse del alcance de la invención tal como se definen mediante las reivindicaciones siguientes.
+ ES-2912599_B2 DESCRIPCI N SISTEMA Y MÉTODO PARA LA GESTIÓN DE ALMACENES CAMPO TÉCNICO DE LA INVENCIÓN La presente invención se refiere al campo de la gestión y organización de almacenes donde se reciben, se guardan y se distribuyen productos o material de cualquier tipo, es decir, pertenecientes a cualquier sector (automoción, textil, químico, farmacéutico, de construcción o cualquier otro) . Más concretamente, la presente invención propone un sistema y un método que permite una mejora sustancial en la eficiencia del funcionamiento de dichos almacenes, mediante una gestión de los mismos basada en un tratamiento y procesado optimizado de información recogida por distintos sensores de monitorización de la actividad en dichos almacenes. ANTECEDENTES DE LA INVENCIÓN La gestión de almacenes donde se guardan gran cantidad de productos es una tarea compleja, ya que en un almacén se realizan numerosas actividades (carga, descarga, almacenamiento de productos, extracción de productos, identificación de los mismos, transporte de los productos dentro del almacén...) , muchas veces de manera simultánea. Es importante el control de todas estas actividades para que se realicen correctamente y en el menor tiempo posible, de manera que el almacén funcione de la manera más rápida, eficiente y correcta posible. En la actualidad, los almacenes se gestionan de manera rudimentaria, en la mayor parte de los casos de manera manual y cuando se hace de manera digitalizada y automatizada, no se realiza de forma eficiente. Hay que tener en cuenta, que en general, en estos almacenes los productos cambian constantemente, así como las cantidades y ubicaciones de los mismos, por lo que en la mayoría de los casos no existen patrones de comportamiento. Así algunos de los problemas que se pueden encontrar actualmente en los almacenes son, entre otros: - Los camiones (o cualquier otro vehículo que se use para transporte de productos) ocupan demasiado tiempo el muelle de carga/descarga del almacén, debido por ejemplo al tiempo que se tarda en cargar o descargar los productos o al tiempo que tarda el camión en posicionarse en el muelle. Esto causa una utilización no eficiente de los muelles (o portones o similares) de carga/descarga del almacén; haciendo que el número de camiones que se carga/descarga en un determinado muelle durante el día sea bajo. - Las carretillas (o cualquier otro vehículo de transporte interno en el almacén) , tardan demasiado en el transporte de los productos debido por ejemplo a que no está optimizado la distancia que deben recorrer o porque no pueden transportar suficiente cantidad de productos. - Algo similar pasa con los terminales de colocación y recogida de objetos en las estanterías (denominados por el término inglés "picking") que tardan demasiado en la recogida o colocación de cada producto. Por todos estos problemas (y otros que no se han citado aquí) en la actualidad la gestión de almacenes se realiza de manera poco eficiente. Por esta razón, existe la necesidad de un procedimiento y sistema de gestión de almacenes que solucione todos estos problemas y que, en general, permita una gestión de almacenes eficiente, rápida y que implique ahorro de recursos. SUMARIO DE LA INVENCIÓN El objetivo de la presente invención es el de desarrollar un sistema y método de gestión (y monitorización) de almacenes mediante uno o varios sensores de monitorización y uno o varios algoritmos de procesado, que permiten obtener parámetros para la mejora de la eficiencia de algunos de los recursos más relevantes de un almacén y, en general, que mejoran la eficiencia en la gestión del almacén resolviendo, entre otros los problemas anteriormente expuestos. La presente invención puede aplicarse a cualquier tipo de almacén que almacena cualquier tipo de objetos, tanto de propósito logístico (almacenes logísticos, receptores y distribuidores de productos, pertenecientes estos a cualquier sector: utomoción, textil, químico, farmacéutico, etc.) como de propósito industrial (almacenes internos de una determinada fábrica, o externos a la misma, que realizan la recepción y distribución de productos o componentes a cualquier proceso industrial) . Con el método y sistema propuesto, se pueden conseguir las siguientes ventajas técnicas, entre otras: • En los muelles de carga de los almacenes (o portones o similar) : reducción de los tiempos de utilización. Los camiones serán cargados o descargados en menos tiempo, por lo que los muelles podrán ser utilizados por más camiones en el mismo tiempo. • En los camiones (u otros vehículos similares) reducción de los tiempos de carga y descarga de los productos, así como de las ineficiencias asociadas a dichos procesos. • Reducción de los tiempos de posicionamiento de los camiones en los muelles; esto es, del tiempo que tarda el camión en llegar y posicionarse en el muelle asignado. • En las carretillas (o vehículos similares) , reducción de los tiempos de transporte y de los espacios recorridos, aumento de los volúmenes y pesos transportados, así como reducción de otras ineficiencias asociadas a dichos procesos. • En los terminales manuales de recogida/colocación de objetos ("picking" o similar) si los hubiera, reducción del tiempo empleado durante la recogida/colocación y de los espacios recorridos por los terminales, así como de otras ineficiencias asociadas a dichos procesos. En un primer aspecto, la presente invención propone un sistema para la gestión de un almacén, donde el sistema comprende: - Al menos un sensor de presencia (P) de vehículos de transporte de mercancías (por ejemplo, camiones) , configurado para detectar si un vehículo de transporte de mercancías e encuentra (correctamente) ubicado en una ubicación de carga/descarga (por ejemplo, un muelle o portón) ; - Al menos un sensor de tráfico (T) de elementos en movimiento, configurado para detectar el cruce de un elemento en movimiento (por ejemplo, una persona o una carretilla) en la ubicación de carga/descarga; - Al menos un procesador electrónico configurado para, en un proceso de carga o de descarga de bultos (de un tipo o tipos determinados) y en la ubicación de carga/descarga, realizar: - Recibir la información capturada por el al menos un sensor (P) de presencia de transporte de mercancías y por el al menos un sensor (T) de tráfico de elementos en movimiento, a través de una red de telecomunicación; - A partir de la información recibida del al menos un sensor de presencia (P) , calcular el tiempo en el que la ubicación de carga/descarga está ocupada y a partir de la información recibida del al menos un sensor de tráfico (T) , mientras la ubicación de carga/descarga está ocupada, determinar el tiempo en que se está trabajando en la ubicación, Ttrabajando, y el tiempo en el que no se está trabajando en la ubicación, Tinactivo, donde esta determinación comprende: - Mientras la información recibida del sensor de presencia (P) indica la presencia de un vehículo de transporte de mercancías en la ubicación de carga/descarga, si la diferencia de tiempo entre los momentos en que se producen dos detecciones consecutivas de cruce de algún elemento en movimiento del sensor de tráfico (T) , es menor que un umbral de tiempo predeterminado, se continua incrementando el Ttrabajando; si no, pasado el umbral de tiempo predeterminado, se comienza a incrementar el Tinactivo hasta que se reciba la siguiente señal de dicho sensor de tráfico (T) . ; - Cuando la información recibida del sensor de presencia (P) indica que se ha terminado la presencia del vehículo de transporte de mercancías en la bicación de carga/descarga, se comienza a incrementar Tinactivo, hasta que llegue una nueva señal del sensor de presencia (P) ; - Obtener a partir de los tiempos calculados, uno o más parámetros de eficiencia del almacén. El umbral de tiempo predeterminado puede ser un tiempo máximo de carga predeterminado si el proceso es de carga o un tiempo máximo de descarga predeterminado si el proceso es de descarga, más un tiempo de tolerancia predeterminado; el tiempo máximo de carga o de descarga puede depender del tipo de bulto. El umbral de tiempo predeterminado se puede obtener a partir de parámetros de tiempo calculados a partir de la información recibida del al menos un sensor de tráfico (T) en reproducciones de situaciones de carga o descarga de un vehículo de transporte de mercancías para cada tipo de bulto, en condiciones ideales. También se puede obtener a partir de parámetros de tiempo calculados a partir de la información recibida del al menos un sensor de tráfico (T) en situaciones reales de carga o descarga de un vehículo de transporte de mercancías durante un periodo previo de tiempo determinado. El al menos un sensor (P) de presencia puede ser de tipo inductivo o de tipo fotocélula y el sensor (T) de tráfico puede ser de tipo fotocélula. Los parámetros de eficiencia del almacén calculados en cada momento pueden ser uno o más de los siguientes (esto es un ejemplo y otros parámetros de eficiencia pueden usarse) : - Eficiencia del proceso de carga, OEEcarga, calculado como: OEEcarga = ( (N° de bultos cargados) x (Ti_carga de cada bulto) ) / (Ttot_carga) ; siendo Ttot_carga el Tiempo Total empleado en la carga del vehículo de mercancías hasta el momento y Ti_carga el tiempo ideal de carga del tipo de bulto en cuestión medido en condiciones ideales u obtenido a partir de un histórico de datos de carga; - Disponibilidad del proceso de carga, DISPcarga, calculado como: DISPcarga = (Tcargando) / ( (Tcargando + Tparado) ) , donde "Tcargando" es la suma del tiempo en el estado "trabajando", Ttrabajando durante un periodo determinado y "Tparado" es la suma del tiempo en el estado "Sin Trabajar", Tinactivo durante el periodo determinado; - Eficiencia del proceso de descarga, OEEdescarga, calculado como: OEEdescarga = ( (N° de bultos descargados) x (Ti_descarga de cada bulto) ) / (Ttot_descarga) ; siendo Ttot_descarga" el Tiempo Total empleado en la descarga del vehículo de mercancías hasta el momento y Ti_descarga el tiempo ideal de descarga del tipo de bulto en cuestión medido en condiciones ideales u obtenido a partir de un histórico de datos de descarga; - Disponibilidad del proceso de descarga, DISPdescarga, calculado como: DISPdescarga = (Tdescargando) / ( (Tdescargando + Tparado) ) , donde "Tdescargando" es la suma del tiempo en el estado "trabajando", Ttrabajando durante el periodo determinado y "Tparado" es la suma del tiempo en el estado "Sin Trabajar", Tinactivo, durante el periodo determinado; En una realización, el al menos un procesador está además configurado para: - calcular el tiempo transcurrido desde que se detecta que un vehículo de transporte de mercancías entra en las instalaciones donde se encuentra el almacén hasta que un sensor de presencia (P) detecta que dicho vehículo de transporte de mercancías se encuentra ubicado en una ubicación de carga/descarga. La detección de que un vehículo de transporte de mercancías entra en las instalaciones se puede obtener a partir de información de un sensor de localización (L) ubicado en el vehículo de transporte de mercancías, a partir de un sensor lector de matrículas configurado para detectar la matrícula de vehículos de transporte de mercancías que entran en las instalaciones donde se encuentra el almacén o a partir de información introducida por un operario del almacén en un dispositivo electrónico a través de un interfaz de usuario. El sistema además puede comprender: - Al menos un sensor de movimiento (M1) configurado para detectar cuando una carretilla de transporte de bultos del almacén, está parada o en movimiento y al menos un sensor de volumen y/o peso (V) configurado para detectar cuando una arretilla de transporte de bultos lleva carga o no y las características de volumen y/o peso transportado; - Donde el al menos un procesador electrónico está además configurado para recibir la información capturada por el al menos un sensor de movimiento (M1) y/o del al menos un sensor de volumen y/o peso (V) a través de la red de telecomunicación y determinar, a partir de esta información, el tiempo en que una carretilla de transporte de bultos está con carga y el volumen y/o peso que una carretilla transporta en cada momento, el tiempo en que una carretilla de transporte de bultos está parada y el tiempo en que una carretilla de transporte de bultos está en movimiento. El al menos un procesador electrónico puede estar además configurado para determinar el espacio recorrido por una carretilla del almacén, a partir de información recibida a través de la red de telecomunicación de al menos un sensor de localización (U1) configurado para detectar la localización de una carretilla de transporte de bultos o de la información recibida a través de la red de telecomunicación de al menos un sensor de espacio recorrido (E1) configurado para detectar metros recorridos por una carretilla de transporte de bultos. En una realización, el sistema además comprende: - Al menos un sensor de movimiento (M2) configurado para detectar cuando un terminal de recogida/colocación de bultos del almacén está parado o en movimiento; - Donde el al menos un procesador electrónico está además configurado para recibir la información capturada por el al menos un sensor de movimiento (M2) a través de la red de telecomunicación y determinar, a partir de esta información, el tiempo en que un terminal de recogida/colocación de bultos está parado y el tiempo en que un terminal de recogida/colocación de bultos está en movimiento. La causa de la parada de la carretilla de transporte de bultos o del terminal de recogida/colocación de bultos se puede determinar a partir de información de sensores o a partir de información introducida por un operario del almacén en un dispositivo electrónico a través de un interfaz de usuario. El al menos un procesador electrónico puede estar además configurado para determinar el espacio recorrido por un terminal de recogida/colocación de bultos del almacén, a partir de información recibida a través de la red de telecomunicación de al menos un sensor de localización (U2) configurado para detectar la localización de terminal de recogida/colocación de bultos o de la información recibida a través de la red de telecomunicación de al menos un sensor de espacio recorrido (E2) configurado para detectar metros recorridos por terminal de recogida/colocación de bultos. El al menos un procesador electrónico puede estar además configurado para asociar a cada tipo de bulto, los tiempos y/o parámetros calculados por el al menos un procesador electrónico. Al menos un dispositivo electrónico puede presentar a un usuario, uno o más de los tiempos y/o parámetros calculados por el al menos un procesador electrónico, mediante un interfaz de usuario del dispositivo (mediante gráficos, tablas, o cualquier otro tipo de formato) . En un segundo aspecto, la presente invención propone un método para la gestión de un almacén, donde el método comprende para un proceso de carga o de descarga de bultos en una ubicación de carga/descarga del almacén, los siguientes pasos realizados por uno o más procesadores electrónicos: a) Recibir la información capturada por al menos un sensor (P) de presencia de transporte de mercancías a través de una red de telecomunicación, donde el al menos un sensor de presencia (P) de vehículos de transporte de mercancías está configurado para detectar si un vehículo de transporte de mercancías se encuentra ubicado en la ubicación de carga/descarga b) Recibir la información capturada por al menos un sensor (T) de tráfico de elementos en movimiento, a través de la red de telecomunicación, donde el al menos un sensor de tráfico (T) de elementos en movimiento está configurado para detectar el cruce de un elemento en movimiento en la ubicación de carga/descarga; c) A partir de la información recibida del al menos un sensor de presencia (P) , calcular el tiempo en el que la ubicación de carga/descarga está ocupada y a partir de la información recibida del al menos un sensor de tráfico (T) , determinar dentro de ese tiempo, el tiempo en que se está trabajando en la ubicación, Ttrabajando, y el tiempo en el que no se está trabajando en la ubicación, Tinactivo, mediante los siguientes pasos: c1) Mientras la información recibida del sensor de presencia (P) indica la presencia de un vehículo de transporte de mercancías en la ubicación de carga/descarga, si la diferencia de tiempo entre los momentos en que se producen dos detecciones consecutivas de cruce de algún elemento en movimiento del sensor de tráfico (T) , es menor que un umbral de tiempo predeterminado, se continua incrementando el Ttrabajando; si no, pasado el umbral de tiempo predeterminado, se comienza a incrementar el Tinactivo hasta que se reciba la siguiente señal de dicho sensor de tráfico (T) ; c2) Cuando la información recibida del sensor de presencia (P) indica que se ha terminado la presencia del vehículo de transporte de mercancías en la ubicación de carga/descarga, se comienza a incrementar Tinactivo, hasta que llegue una nueva señal del sensor de presencia (P) . d) Obtener a partir de los tiempos calculados, uno o más parámetros de eficiencia del almacén. Finalmente, en un tercer aspecto de la invención se presenta un programa de ordenador que comprende instrucciones ejecutables por ordenador para implementar el método descrito, al ejecutarse en el sistema. Dichas instrucciones pueden estar almacenadas en un medio de almacenamiento de datos digitales. Para un entendimiento más completo de la invención, sus objetos y ventajas, puede tenerse referencia a la siguiente memoria descriptiva y a los dibujos adjuntos. DESCRIPCIÓN DE LOS DIBUJOS Para complementar la descripción que se está realizando y con objeto de ayudar a una mejor comprensión de las características de la invención, de acuerdo con unos ejemplos preferentes de realizaciones prácticas de la misma, se acompaña como parte integrante de esta descripción un juego de dibujos en donde, con carácter ilustrativo y no limitativo, se ha representado lo siguiente: La Figura 1 muestra de manera esquemática un almacén donde se aplica el sistema y método propuesto de acuerdo a una realización de la invención. DESCRIPCIÓN DETALLADA DE LA INVENCIÓN La presente invención propone un sistema y método para la gestión de un almacén, basado en sensores de monitorización y en el procesado de los datos obtenidos de dichos sensores (aplicando determinados algoritmos) . La presente invención es aplicable a cualquier tipo de almacén (o más generalmente hablando, instalación de almacenamiento) que puede almacenar cualquier tipo de objetos: cualquier tipo de material o productos de cualquier tipo como componentes, alimentos, fármacos, telas...o cualquier otro tipo de objeto. La figura 1 muestra esquemáticamente (a modo de ejemplo no limitativo) un almacén (1) genérico donde se puede aplicar el método y sistema de la presente invención. En dicho almacén hay N estanterías (11...1N, con N>=1) , o en general N estructuras de cualquier tipo donde se pueden almacenar objetos. El almacén también dispone de una o más ubicaciones de carga y descarga (muelles, portones.o cualquier tipo de instalación donde se realice la carga y/o descarga de objetos para su salida y/o entrada respectivamente, en el almacén) . En el ejemplo de la figura 1, existen 3 muelles y 2 portones (esto es solo un ejemplo, el número de muelles y portones son parámetros propios de cada almacén) a través de los cuales los vehículos (20) de carga/descarga (generalmente camiones) cargarán o descargarán los objetos, y una o más carretillas (30) de transporte de bultos. Con el término genérico de carretillas, nos referimos a cualquier vehículo que se use para el transporte interno de los bultos dentro del almacén o de las instalaciones (es decir, para desplazar los objetos o bultos por el interior del almacén desde el camión a las estanterías en el caso de a descarga o desde las estanterías al camión en el caso de carga o incluso entre camiones) . El almacén también puede disponer de uno o más terminales (40) para realizar la recogida o la colocación de los objetos (individuales o normalmente agrupados en bultos) en las estanterías (llamados terminales de "picking", usando el término inglés) . Como se ve en la figura 1, se pueden disponer de varios sensores para capturar distintos tipos de datos relacionados con recursos del almacén y, en general, datos del funcionamiento del almacén. En la figura 1 aparecen varios tipos de sensores pero no todos son obligatorios en todos las realizaciones de la invención (es decir, se pueden usar opcionalmente uno o varios tipos de los sensores que aparecen en la figura 1, dependiendo de la realización de la invención) . Los datos de los distintos sensores usados se recogen por uno o más dispositivos electrónicos (llamados genéricamente, dispositivos de recogida de datos) y, generalmente, se almacenan en una o más bases de datos para su procesado en uno o más procesadores electrónicos (mediante uno o más algoritmos que se expondrán más adelante) para mejorar la eficiencia de la gestión del almacén. Estos dispositivos de recogida de datos pueden formar parte de los dispositivos electrónicos de explotación (de los que se hablará más adelante) o pueden no formar parte de ellos sino enviarle a su vez los datos, a través de cualquier red de telecomunicación, a los dispositivos electrónicos de explotación. Algunos de los distintos sensores que se pueden usar son (esto es solo un ejemplo no limitativo, se pueden usar otro tipo de sensores y no es obligatorio el uso de todos los tipos de sensores que se exponen a continuación) : - Uno o más sensores (P) para detectar la posición/presencia de un camión (en general, de cualquier vehículo de transporte de mercancías) en una ubicación de carga/descarga (por ejemplo, un muelle o portón) . Puede ser, por ejemplo, del tipo fotocélula, inductivo, o de cualquier otro tipo. Con este sensor se detecta si un camión está ubicado en la ubicación de carga/descarga (muelle/portón) de manera correcta, es decir, listo para cargar o descargar. La información capturada por dicho sensor se enviará al dispositivo de recogida de datos del almacén, mediante cualquier tipo de red de telecomunicaciones (cableada o inalámbrica) . - Uno o más sensores (T) de tráfico de personas o carretillas (o más genéricamente, de elementos en movimiento) en cada ubicación de carga/descarga, para detectar si se está cargando o descargando el camión (o generalmente hablando el vehículo de transporte de mercancías) . Este sensor puede ser de tipo fotocélula o de cualquier otro tipo. Cada vez que cruce un elemento en movimiento (por ejemplo, una persona o carretilla) hacia el interior/exterior del camión, se detectará dicho cruce, por ejemplo, cortando el haz de luz de la fotocélula. El procesado de los datos recogidos por este sensor (mediante un algoritmo que se explicará más adelante) permite detectar cuándo se está cargando/ descargando el camión, conforme se explica más adelante. La información capturada por dicho sensor se enviará al dispositivo de recogida de datos del almacén, mediante cualquier tipo de red de telecomunicaciones (cableada o inalámbrica) . - Uno o más sensores (L) para detectar la localización de cada camión. Este sensor puede ser por ejemplo del tipo de Sistema de Posicionamiento Global (GPS de sus siglas en inglés) o de cualquier otro tipo. Típicamente irá ubicado en el vehículo de transporte de mercancías (típicamente un camión) ; el vehículo enviará la información de dicho sensor al dispositivo de recogida de datos del almacén, mediante cualquier tipo de red de telecomunicaciones (cableada o inalámbrica) . - Uno o más sensores (R) para leer la matrícula de los vehículos de transporte de mercancías que van a realizar carga/descarga en el almacén. Este sensor puede estar situado en cada uno de los muelles o en las puertas de entrada de en las instalaciones donde se encuentra el almacén, detectando la matrícula de los vehículos (camiones) que entran en dichas instalaciones. La información capturada por dicho sensor se enviará al dispositivo de recogida de datos del almacén, mediante cualquier tipo de red de telecomunicaciones (cableada o inalámbrica) . - Uno o más sensores de movimiento (M1) , preferiblemente colocados en cada una de las carretillas para detectar cuándo una carretilla está parada o en movimiento. También se pueden usar sensores de movimiento (M2) , preferiblemente cada uno de los terminales de recogida/colocación (terminales de "picking") , para monitorizar su movimiento (y detectar cuándo el terminal está parado o en movimiento) . - Uno o más sensores de volumen y/o peso colocado en cada una de las carretillas (V) para detectar cuándo cada carretilla lleva carga o no, las características de volumen y/o peso transportado, así como cuando carga o descarga sus bultos (u objetos) . La información capturada por dicho sensor se enviará al dispositivo de recogida de datos del almacén, mediante cualquier tipo de red de telecomunicaciones (cableada o inalámbrica) . - Uno o más sensores de localización para detectar la localización de cada carretilla (U1) o de cada terminal de recogida/colocación (U2) . Este sensor puede ser por ejemplo del tipo de Sistema de Posicionamiento Global (GPS de sus siglas en inglés) o de cualquier otro tipo. Este sensor típicamente irá ubicado en cada carretilla o terminal, que puede enviar la información de dicho sensor (por ejemplo, en tiempo real) al dispositivo de recogida de datos del almacén (y de ahí al dispositivo de explotación sino es el mismo) , mediante cualquier tipo de red de telecomunicaciones (cableada o inalámbrica) .. - Uno o más sensores de espacio recorrido para calcular metros recorridos por cada carretilla (E1) o terminal de recogida/colocación (E2) . En una realización, este sensor no es necesario como tal, sino que a partir de la información recogida por cada sensor de localización (U1, U2) , se calculan los metros recorridos por cada carretilla o terminal. En una realización el sistema se compone de dos tipos de elementos fundamentales, por un lado, los sensores (uno o más de los expuestos anteriormente) y, por otro los dispositivos electrónicos de explotación de la información monitorizada por los sensores. Dichos dispositivos electrónicos de explotación pueden ser cualquier dispositivo con uno o más procesadores electrónicos de cualquier tipo (por ejemplo, un servidor, un smartphone o de cualquier otro tipo) donde se recogen/reciben esos datos, se almacenan permanente o temporalmente (en bases de datos externas o internas al dispositivo) y se procesan (mediante uno o más algoritmos que se expondrán más adelante) . La comunicación entre los diferentes elementos podrá realizarse de forma cableada o inalámbrica (mediante comunicación WiFi, Bluetooth, ZigBee, telefonía móvil GSM, 3G, 4G, 5G...o cualquier otro tipo de comunicación inalámbrica) a través de cualquier tipo de red de telecomunicación. Los sensores deben poder comunicarse con uno o más dispositivos electrónicos (llamados de recogida de datos) a los que envían las señales que capturan (usando cualquier tipo de tecnología de comunicación alámbrica o inalámbrica, como se ha explicado anteriormente) ; estos dispositivos electrónicos que recogen los datos de los sensores, se comunicarán con el procesador o procesadores de los dispositivos electrónicos de explotación que procesan dichos datos para enviarles dichos datos para su procesado o, en una realización alternativa, el mismo dispositivo electrónico que recoge los datos (es decir, el que recibe la información de los sensores) es el que se encarga de procesarlos. Hay que destacar que los datos se obtienen de los sensores, preferiblemente, en tiempo real. En una realización, uno o más de los sensores también se pueden comunicar entre sí mediante cualquier tipo de comunicación por cable o inalámbrica. Los dispositivos de explotación de los datos (aunque por concisión, se habla solo en plural, puede haber uno o más de un dispositivo de explotación de datos) pueden ubicarse dentro o fuera del almacén o incluso en la nube. Estos dispositivos dispondrán de (o tendrán comunicación con) una o varias bases de datos que contendrán la información recogida por los distintos sensores. En una realización, se propone mejorar la eficiencia de un almacén, mejorando los tiempos y eficiencia de las ubicaciones de carga y descarga, por ejemplo, consiguiendo una mejora de la tasa de ocupación de dichas ubicaciones (por ejemplo, muelles o portones) y una reducción de los tiempos de carga y descarga; mediante la obtención de parámetros que definen el comportamiento de dichos procesos. Para ello se realizan las siguientes tareas, en uno o más procesadores electrónicos del dispositivo de explotación de los datos (éste es un ejemplo no limitativo y no todas las tareas son obligatorias) : - Recibir los datos capturados por el sensor (P) de posición del camión (o cualquier otro vehículo de transporte de mercancías) en la ubicación de carga/descarga y el sensor (T) de detección tráfico de personas y/o carretillas. Aunque se está suponiendo que hay un sensor P y un sensor T por ubicación de carga/descarga (por muelle o portón) , en general puede haber más de un sensor P y más de un sensor T por muelle o portón. O incluso haber muelles o portones del almacén donde no existan estos sensores. - Para cada ubicación de carga/descarga (por ejemplo, muelle o portón) , gracias a la información recibida del sensor P, se computará el tiempo en el que no se detecta ningún camión (o más generalmente hablando ningún vehículo de transporte de mercancías) en dicha ubicación (estado "sin camión", es decir, sin ocupar) y el tiempo en el que se detecta algún camión en dicha ubicación (estado "con camión", es decir ocupada) . - Dentro del estado "con camión" se distinguirá el tiempo en el que el sensor T detecta tráfico (en el que se considerará que se está cargando/descargando el camión, es decir se está trabajando en la carga/descarga) y el tiempo en el que el sensor T no detecta tráfico (en el que se considerará que el muelle o portón está ocupado pero no se está cargando/descargando, es decir, no se está trabajando en la carga/descarga) . El procesado de los datos del sensor T para detectar los estados de trabajo y no trabajo, se explicará más adelante. - Los parámetros de tiempo de ocupación de cada ubicación, tiempo de trabajo y tiempo de ocupación sin trabajar son importantes para mejorar la eficiencia de cada muelle o portón (cada ubicación de entrada/salida) . Como los datos de los sensores se obtienen en tiempo real, el valor de estos parámetros se obtiene en tiempo real, lo que permite una reactividad inmediata en la mejora continua de ineficiencias. Estos valores también se pueden almacenar en bases de datos para su análisis histórico. - Se puede usar también un parámetro de Eficiencia del proceso de carga (o Eficiencia global del equipo, OEE, del inglés Overall Equipment Effectiveness) que, en una realización se calcularía del siguiente modo: OEEcarga = ( (N° de objetos cargados) x (Ti_carga de cada objeto) ) / (Ttot_carga) u OEEcarga = ( (N° de bultos cargados) x (Ti_carga de cada bulto) ) / (Ttot_carga) , si los parámetros se determinan para cada bulto; siendo "Ttot_carga" el Tiempo Total empleado en la carga del camión hasta el momento y Ti_carga el tiempo ideal de carga de cada objeto/bulto. En el caso de la Eficiencia del proceso de descarga, se calcularía en una realización de la siguiente forma: OEEdescarga = ( (N° de objetos descargados) x (Ti_descarga de cada objeto) ) / (Ttot_descarga) u OEEdescarga = ( (N° de bultos descargados) x (Ti_descarga de cada bulto) ) / (Ttot_descarga) , si los parámetros se determinan para cada bulto; siendo "Ttot_descarga" el Tiempo Total empleado en la descarga del camión hasta el momento y Ti_descarga el tiempo ideal de descarga de cada objeto/bulto. Este parámetro OEE permitirá predecir cuándo se va a terminar de cargar el camión, dado que mide y compara en tiempo real cómo se está ejecutando realmente el proceso de carga o descarga respecto al tiempo ideal. En una realización este tiempo ideal, se obtiene midiendo el proceso de carga o descarga en condiciones ideales; en una realización alternativa este tiempo ideal, se obtiene a partir de un histórico de los tiempos de carga o descarga en condiciones reales (por ejemplo, la media de los tiempos de carga o descarga registrados durante un determinado tiempo o la media de los tiempos de carga o descarga registrados durante un determinado tiempo quitando los casos donde ha habido algún problema) . - Se puede usar también un parámetro de Disponibilidad del proceso de carga (DISP_carga) que, en una realización se calcularía del siguiente modo: DISP = (Tcargando) / ( (Tcargando + Tparado) ) donde "Tcargando" es el tiempo total en que hay camión en el muelle y éste se está cargando (la suma del tiempo en el estado "trabajando", Ttrabajando, durante un periodo determinado) y "Tparado" es el tiempo en que hay camión, pero éste no se está cargando (la suma del tiempo en el estado "Sin Trabajar", Tinactivo, durante un periodo determinado) . En el caso del proceso de descarga, se puede usar también Disponibilidad del proceso de descarga (DISP_descarga) que, en una realización se calcularía del siguiente modo DISP = (Tdescargando) / ( (Tdescargando + Tparado) ) donde "Tdescargando" es el tiempo total en que hay camión en el muelle y éste se está descargando (la suma del tiempo en el estado "trabajando", Ttrabajando) y "Tparado" es el tiempo en que hay camión, pero éste no se está descargando (la suma del tiempo en el estado "Sin Trabajar", Tinactivo) . - Mediante la obtención de estos parámetros de tiempo de ocupación de cada ubicación, tiempo de trabajo y tiempo de ocupación sin trabajar (y opcionalmente otros derivados de éstos, como Eficiencia del proceso o Disponibilidad) se puede mejorar la eficiencia de cada muelle o portón (cada ubicación de entrada/salida) y del almacén en general. Así, por ejemplo, si estos parámetros tienen valores considerados bajos (comparados con un umbral o con el funcionamiento histórico del almacén o de otros almacenes similares) , se pueden variar diversos factores de diseño y/o funcionamiento del almacén (como número de estanterías, número de carretillas u operarios, distancia entre los muelles y la estantería, tipo de carretillas, ubicación de los objetos en la estantería...) que hagan que mejoren estos parámetros. Por ejemplo, ante un cambio en uno de los factores, se pueden medir estos parámetros para ver cómo ha variado su valor y decidir si ese cambio ha mejorado la eficiencia (y por lo tanto ha de mantenerse) o ha empeorado la eficiencia y, por lo tanto, ha de revocarse. - El dispositivo de explotación de datos, puede presentar está información al usuario (mediante un interfaz de usuario) en cualquier formato. Por ejemplo, en una gráfica puede indicarle los periodos del día en que cada ubicación de carga/descarga está sin ocupar ("sin camión") , ocupada sin trabajar ("con camión sin trabajar") u ocupada trabajando ("trabajando") ; o la cantidad de tiempo en que se está en cada uno de estos estados. Así se podría mostrar en una gráfica el log o sucesión de estados (sin camión, trabajando o sin trabajar) y tiempos de cada estado en el eje temporal o el Pareto de estados, con tiempos y número de repeticiones de cada estado (se mostrará un Pareto con 3 barras verticales, representando los 3 estados distintos) . Esto es solo un ejemplo, y cualquier otro tipo de gráficas se pueden usar. Esta misma información se puede dar en forma de tabla o texto, en vez de o adicionalmente a, gráficamente. - En la siguiente tabla (Tabla 1) , se muestra a modo de ejemplo, una posible presentación al usuario (por ejemplo, mediante una interfaz de usuario) de los datos y parámetros de los que se han hablado anteriormente. Así, en el ejemplo de esta tabla se muestran los stados y tiempos agregados, en este caso por turno y un indicador de eficiencia de carga/descarga (en este caso, las disponibilidad %Disp) del muelle, como relación entre los tiempos trabajando y el tiempo total (tiempo total que ha estado el camión en el muelle = Ttrabajando+TInactivo o de parada) . Tabla 1 A continuación, se explicará cómo se procesan los datos provenientes del sensor (o sensores) T de tráfico de personas o carretillas en la ubicación de carga/descarga (muelle, portón ...) en una realización a modo de ejemplo no limitativo. Aunque por concisión y simplicidad, se explicará el procesado principalmente en referencia a la carga del camión, la misma es aplicable al proceso de descarga. Lo único hay que tener en cuenta que los valores de ejemplo de los parámetros mencionados a continuación para los procesos de carga y descarga pueden y suelen ser diferentes. - Lógicamente, la frecuencia con la que las carretillas/personas circulan hacia el interior/exterior del camión depende del tipo y tamaño de objetos/bultos que transporte el camión, de la longitud del camión, del tipo de carretilla utilizado, de la persona/personas que realizan dicha carga o descarga, de la distancia entre el camión y las estructuras de almacenamiento (estanterías) , etc.. A modo de ejemplo, puede haber cargas que generen una señal del sensor "T" detectando la presencia de una persona o carretilla en el muelle cada 30 segundos, otros cada 3 minutos, otros cada 8 minutos, etc. - Se calcula un Tiempo Ideal de carga, Ti, para cada bulto que se carga en el almacén en sus diferentes condiciones. Por bulto, se entiende un conjunto de objetos agrupados y que, por lo tanto, se cargan o descargan de una vez (normalmente porque es el número de objetos que vienen empaquetados juntos) . Para calcular dicho tiempo ideal, se puede reproducir la situación de carga del camión en condiciones ideales (sin obstáculos o problemas que perjudiquen al proceso de carga) . En estas circunstancias, el sensor T mide los tiempos reales de cada carga individual y los envía (directamente o a través de un equipo de recogida de datos) al dispositivo de explotación o a la base de datos. Como se ha explicado, en base a estos datos medidos en cada carga individual (en condiciones ideales) , el algoritmo desarrollado calcula, por ejemplo, el tiempo mínimo de carga (Tmin) , el tiempo máximo de carga (Tmax) y el Tiempo medio de carga (Tmed) de cada bulto. En una realización, el tiempo medio de carga en condiciones ideales es lo que se tomará como Tiempo Ideal de carga, Ti. También se pueden calcular otros valores estadísticos como por ejemplo la Desviación media o la Varianza o cualquier otro. Tmin, Tmax, Tmed y Ti serán asociados al sensor "T" de cada ubicación de carga/descarga (y, preferiblemente, de cada tipo de objeto) , relacionados con la frecuencia de circulación (de una persona o de una carretilla en la tarea de carga) , con el tipo de bultos transportados por el camión, etc. Esta parametrización proporciona enorme flexibilidad y fiabilidad de la información. En una realización, estos parámetros (Tmin, Tmax, Tmed, Ti...) se pueden actualizar con el histórico de valores reales del tiempo de carga medidos durante un cierto periodo de tiempo anterior. - En una realización, para determinar cuándo se está cargando un camión, se utilizará el tiempo "Tmax", al que se añadirá un Tiempo de Tolerancia "Ttol" (este parámetro "Ttol" es configurable) . Por ejemplo, si se considera un bulto tiene un tiempo de carga "Tmax" de 100 segundos; se creará un parámetro Tiempo de Referencia (también llamado umbral de tiempo) de carga "Tref", que será la suma de "Tmax" más "Ttol": "Tref" = ("Tmax" + "Ttol") . Si se define por ejemplo un "Ttol" del 20% (20 segundos en este caso) , obtendremos un "Tref" de 120 segundos (estos valores, son solo ejemplos ilustrativos; y se pueden usar cualesquiera otros valores) . De este modo, al "Tmax" obtenido midiéndolo en condiciones ideales, se aplica una tolerancia "Ttol" configurable (por ejemplo, a través de una aplicación software en el dispositivo de explotación) y se obtiene el "Tref como suma de ambos (esto es solo un ejemplo, y este tiempo de referencia o umbral se puede determinar de muchas otras formas) . - En una realización, durante la carga de un camión, tras una señal de cruce (de una persona o de una carretilla) del sensor T, se esperará a ver si se produce otra señal del sensor "T". Si se produce otra señal de cruce antes de que pase el tiempo de referencia Tref (en este caso de ejemplo 120 segundos) , se resetea el contador a 0 y se espera a la siguiente señal de cruce antes de ese Tref. Durante todo este tiempo se considera que se está cargando (modo trabajando, es decir, se está incrementando el contador Ttrabajando) . Es decir, mientras que el tiempo transcurrido entre dos señales de cruce consecutivas sea menor que Tref, se considera que se está cargando el camión y por lo tanto se está trabajando y todo el tiempo transcurrido se irá computando como de modo "trabajando". Se está suponiendo que el sensor P ha detectado la señal de que el muelle está ocupado (si el muelle no está ocupado, no puede haber carga o descarga, por lo que típicamente no se analizan las señales provenientes del sensor T en ese periodo) . En el momento en que no se produce otra señal de cruce antes de "Tref", a partir ese momento se registrará un modo que indica que la carga del camión está Parado (modo "Sin trabajar" o "Inactivo") , y se mantendrá este modo hasta que se produzca una nueva señal de este sensor "T" (es decir, se está incrementando el contador Tinactivo) o hasta que el sensor P informe de que el camión ya no ocupa la ubicación de carga/descarga (es decir, el camión se ha ido y se ha terminado el proceso de carga/descarga) . Estas Paradas (periodos en los que no se obtiene una señal de cruce procedente del sensor T) pero hay un camión en el muelle, pueden tener una duración variable y su causa puede ser registrada, en algunos casos automáticamente (por ejemplo mediante sensores que detectan la causa de la parada) o en otros casos gracias a la declaración de un operario, por ejemplo a través de un dispositivo electrónico (llamado Interface de Operario, dispositivo "I" en la figura 1) con una interface de usuario que permite al operario introducir que ha habido una parada y su causa. Aunque en la figura 1 sólo se muestra un Interface de Operario, esto es solo un ejemplo y puede haber más de uno (o ninguno, si no se estima necesario) . Causas típicas de este tipo de paradas son, por ejemplo: Falta de los objetos de carga (están sin preparar, siniestro, verificaciones, retraso ruta previa) ; averías (avería de máquina, avería del muelle, cambio de batería, avería de sistema informático, siniestro en la carga/descarga, avería scanner...) ; paradas relacionadas con recursos (falta de carretilla, problemas de posicionamiento de camión en muelle, retraso de camión, camión en pausa, falta de operario, falta de scanner.) . Mientras se esté produciendo la carga del camión (modo "Trabajando") se puede medir exactamente el tiempo de carga exacto de cada bulto (por ejemplo 149" o 154" o cualquier otro) , que permitirá además hacer cálculos estadísticos por bulto, como medias, desviaciones, etc., y compararlas con los tiempos predefinidos. El tiempo entre señales del sensor T se corresponde con el tiempo de carga del bulto. A modo de ejemplo no limitativo, el tiempo de carga de del bulto puede medirse, al menos, de las siguientes maneras: • Si sólo utilizamos una fotocélula como sensor T, la primera señal se produce cuando entra a cargar el primer bulto, la segunda señal cuando sale a buscar el segundo bulto y la tercera señal cuando vuelve a cargar el segundo bulto, y así sucesivamente; el tiempo entre la primera y la tercera señal es el tiempo total de carga del segundo bulto, desglosado en 2 partes: tiempo de ir a buscarlo al almacén y tiempo de depositarlo en el camión) • Si, por ejemplo, el sensor T lo forman 2 fotocélulas, una detrás de la otra, podemos saber el sentido del tráfico, si se está entrando o saliendo del camión/muelle; el tiempo de carga de un bulto se corresponde con dos entradas consecutivas. El uso de 2 fotocélulas consecutivas como en el ejemplo anterior, además de servir para medir el tiempo de carga, proporciona también información sobre el sentido del tráfico e incluso la velocidad a la que se desplaza la carretilla/operario, con objeto de medirla y optimizarla. - En la explicación anterior se ha considerado que para determinar "Tmin", "Tmax" y "Tmed", entre otros parámetros, se mide realmente, en condiciones ideales el proceso de carga del camión. Aunque esto es lo ideal, no tiene por qué ser necesario; así en una realización, estos parámetros se pueden ir midiendo y calculando en condiciones reales desde la primera carga. Así, por ejemplo, el "Tmin" puede considerarse el tiempo mínimo de carga registrado a lo largo del tiempo anterior; el "Tref" podrá ser inicialmente varias veces el "Tmin" (típicamente 3 veces) , lo que permitirá medir y calcular inicialmente el "Tmed", automáticamente descontando las paradas largas; una vez se tenga el "Tmin" y el "Tmed", podremos calcular el "Tmax", que equidistará del "Tmed" lo mismo que "Tmin". Una vez se disponga de este "Tmax" real, se podrá calcular un "Tref" más ajustado a la realidad que el considerado inicialmente, aplicando el parámetro configurable "Ttol" (típicamente el 20% aunque puede tomar cualquier otro valor) . Esto es solo un ejemplo, y se pueden usar otros algoritmos para el cálculo de "Tmin", "Tmax" y "Tmed" a partir de las medidas en tiempo real. Además, en una realización, se propone mejorar la eficiencia del almacén, en concreto mejorando los tiempos de posicionamiento del camión en el muelle o portón mediante la obtención de parámetros que afectan a dicho proceso. Para ello se realizan las siguientes tareas, en uno o más procesadores electrónicos (éste es un ejemplo no limitativo y no todas las tareas son obligatorias) : - Detección del momento de llegada del vehículo de carga/descarga (camión) al almacén o a las instalaciones donde se encuentra el almacén. Esto se puede hacer de numerosas maneras: Por ejemplo, mediante la información recibida del sensor L que nos indica la localización del camión, mediante la información recibida del sensor R que nos indica que un determinado camión (cuya matrícula ha leído) ha llegado a las instalaciones o mediante un empleado (por ejemplo, una persona de la oficina o guarda de seguridad o cualquier operario) que ve el camión y lo indica al dispositivo de explotación de datos (por ejemplo, ediante una aplicación informática realizada para ello en cualquier dispositivo electrónico o mediante el dispositivo de interfaz operario) . - Detección del momento en el que el camión llega a la ubicación de carga/descarga mediante la lectura del sensor P situado en dicha ubicación. - Obtener la diferencia entre los dos tiempos anteriores indicará el tiempo que ha tardado el camión en posicionarse en el muelle. Si el valor de este parámetro es muy alto, se pueden cambiar factores de diseño del almacén para mejorarlo. - Gracias a los sensores que se utilizan, se conoce en todo momento la ocupación de las ubicaciones de carga/descarga, por lo que cuando se detecta que el camión llega a las instalaciones se le puede indicar automáticamente (por ejemplo, mediante un mensaje a un dispositivo de usuario del conductor del camión) a qué muelle/portón debe dirigirse, lo que agiliza el posicionamiento del camión al muelle y reduce el tiempo de no ocupación de los muelles. Adicionalmente, mediante la tecnología GPS o similar, el sistema también conoce la posición del camión fuera de las instalaciones, por ejemplo, cuando se encuentra a una determinada distancia de las mismas, por lo que puede gestionar con antelación a qué muelle va a dirigir al camión e incluso acelerar o detener la carga/descarga en algún muelle para desocuparlo, o mandar desocupar uno de los muelles si la carga/descarga ha terminado y aún sigue ocupado. Esto son solo ejemplos (no limitativos) de acciones que se pueden tomar a partir de la determinación de estos parámetros y que permiten una mejor utilización de los recursos y, por lo tanto, una mejora en la gestión del almacén. En una realización, se propone además mejorar la eficiencia del almacén, en concreto mejorando la utilización y eficiencia de los vehículos de transporte interno (carretillas) , por ejemplo, consiguiendo una reducción de los tiempos de transporte, del espacio que tienen que recorrer, optimizando los volúmenes y pesos transportados...; mediante la obtención de parámetros que afectan a dicho proceso (transporte en carretillas) . Para ello se realizan las siguientes tareas, en uno o más procesadores electrónicos (éste es un ejemplo no limitativo y no todas las tareas son obligatorias) : - Detección del estado de movimiento o parada de cada carretilla. Preferiblemente esto se realiza a partir de la información recibida del sensor de movimiento (M1) de la carretilla, mediante el cual se conocerá si la carretilla está en movimiento o parada. La causa del paro de la carretilla se podrá detectar en algunos casos automáticamente (por ejemplo mediante sensores que detectan la causa de la parada) o en otros casos gracias a la declaración de un operario, por ejemplo a través de un dispositivo electrónico (Interface de Operario "I") que permite a un operario del almacén introducir que ha habido una parada y su causa. - Detección de si cada carretilla lleva carga o no, las características de lo que transporta (volumen y/o peso) así como cuando carga o descarga los bultos que transporta (es decir, cuando una carretilla pasa de estar sin carga a estar con carga o viceversa) . Preferiblemente esto se realiza a partir de la información recibida del sensor de volumen (V) de la carretilla - Determinación de la localización de una o más carretillas, preferiblemente mediante la información recibida de su sensor de localización (U1) que permiten conocer la localización de una carretilla. - Determinación de la distancia (por ejemplo, los metros) recorrida por cada carretilla en cada modo (transportando bultos o en vacío) . Esta determinación se puede hacer a partir de la información recibida de sensores específicos (E1) que miden el espacio recorrido por cada carretilla o, alternativamente, a partir de la información de localización de cada carretilla en cada momento recogida por cada sensor de localización U1. - Todos los parámetros determinados (estado de movimiento y carga de cada carretilla, localización de la misma, espacio recorrido...) se pueden relacionar automáticamente con el tipo de objeto o bulto que se trata, o más en concreto con los datos que describen los objetos o bultos tratados, llamado datos del componente (C en la figura 1) . Estos datos se obtienen generalmente de la base de datos de información del almacén. En una realización, esta información sobre los objetos o bultos almacenados se obtienen del llamado Sistema de Planificación de Recursos Empresariales (ERP de sus siglas en inglés) del almacén. - La determinación de estos parámetros permite conocer en todo momento las características del proceso de transporte de cada carretilla, como por ejemplo, el estado de movimiento y carga de cada carretilla, localización de la misma o el espacio recorrido por cada una de ellas en un periodo de tiempo. Esto permite mejorar la eficiencia de la utilización de cada carretilla y del almacén en general. Así por ejemplo, si se detecta que una carretilla está mucho tiempo sin carga, se puede destinar durante ese tiempo a la descarga de otro camión; o si se detecta que una carretilla recorre mucho espacio se puede asignar a una tarea de transporte en otro muelle o a otra estantería, que haga que la distancia recorrida sea menor...Esto son solo ejemplos (no limitativos) , de acciones que se pueden tomar a partir de la determinación de estos parámetros y que permiten una mejor utilización de los recursos y, por lo tanto, una mejora en la gestión del almacén. En una realización, se propone además mejorar la eficiencia del almacén, en concreto mejorando la utilización y eficiencia de los terminales manuales de recogida/colocación de bultos u objetos (llamados terminales de "picking") , por ejemplo, consiguiendo una reducción de los tiempos empleados durante la recogida/colocación y de los espacios recorridos por los terminales de transporte.; mediante la obtención de parámetros que afectan al proceso de funcionamiento de dichos terminales. Para ello se realizan las siguientes tareas, en uno o más procesadores electrónicos (éste es un ejemplo no limitativo y no todas las tareas son obligatorias) : - Detección del estado de movimiento o parada de cada terminal. Preferiblemente esto se realiza a partir de la información recibida del sensor de movimiento (M2) del terminal, mediante el cual se conocerá si está en movimiento o parado. La causa del paro del terminal se podrá detectar en algunos casos automáticamente (por ejemplo mediante sensores que detectan la causa de la parada) o en otros casos gracias a la declaración de un operario, por ejemplo, a través de un dispositivo electrónico (Interface de Operario "I") que permite a un operario del almacén introducir que ha habido una parada y su causa. - Determinación de la localización de una o más terminales, preferiblemente mediante la información recibida de su sensor de localización (U2) que permiten conocer la localización de un terminal. - Determinación de la distancia (por ejemplo, los metros) recorrida por cada terminal para la recogida/colocación de cada bulto concreto. Esta determinación se puede hacer a partir de la información recibida de sensores específicos (E2) que miden el espacio recorrido por cada terminal o, alternativamente, a partir de la información de localización de cada terminal en cada momento recogida por cada sensor de localización U2. - Todos los parámetros determinados (estado de movimiento de cada terminal, localización del mismo, espacio recorrido...) se pueden relacionar automáticamente con el tipo de objeto o bulto que recoge o coloca el terminal, o más en concreto con los datos que describen los objetos o bultos seleccionados por el terminal, llamado datos del componente (C en la figura 1) . Así, por ejemplo, se podría obtener la frecuencia con la que se recoge o coloca (y, por lo tanto, la de carga o descarga) cada objeto o bulto. Estos datos de componente se obtienen generalmente de la base de datos de información del almacén. En una realización, esta información sobre los objetos o bultos almacenados se obtienen del llamado Sistema de Planificación de Recursos Empresariales (ERP de sus siglas en inglés) del almacén. La captura de datos del componente (C en la figura 1) juega un papel importante en aquellos supuestos en los que el terminal o carretilla no disponga de sensores de movimiento M, ni de posición U, ni de espacio recorrido E, pero sí estén conectados al ERP, ya que esto permitirá conocer en tiempo real cada vez que el terminal o la carretilla recoge o coloca el bulto; por tanto, siguiendo la misma descripción que para el caso de la carga/descarga de camiones, nos permitirá saber si están trabajando Ttrabajando o inactivos Tinactivo, y medir su Tmin, Tmax, Tmed, Tref, Disp, OEE, etc. Cuando se producen 2 capturas de datos de (C) dentro de un umbral de tiempo, se considera que el terminal está trabajando, Ttrabajando; si no, se considera que está parado, Tinactivo. - La determinación de estos parámetros permite conocer en todo momento las características del proceso de transporte de cada terminal, como por ejemplo, el estado de movimiento de cada terminal, localización del mismo, espacio recorrido por cada terminal en un periodo de tiempo, frecuencia de carga o descarga de cada bulto.. Esto permite mejorar la eficiencia de la utilización de cada terminal y del almacén en general. Así por ejemplo, si se detecta que un terminal está mucho tiempo sin moverse, se puede destinar durante ese tiempo a otra estantería (si son movibles) ; o si se detecta que un terminal recorre mucho espacio, se pueden recolocar los objetos en las estanterías de manera que la distancia ecorrida por cada terminal sea menor...Esto son solo ejemplos (no limitativos) , de acciones que se pueden tomar a partir de la determinación de estos parámetros y que permiten una mejor utilización de los recursos y, por lo tanto, una mejora en la gestión del almacén. En este texto, el término "comprende" y sus derivaciones (como "comprendiendo", etc.) no deben entenderse en un sentido excluyente, es decir, estos términos no deben interpretarse como excluyentes de la posibilidad de que lo que se describe y define pueda incluir más elementos, etapas, etc. La presente invención se puede aplicar en cualquier tipo de instalaciones donde se realice almacenaje de objetos de cualquier tipo. Algunas realizaciones preferidas de la invención se describen en las reivindicaciones dependientes que se incluyen seguidamente. Descrita suficientemente la naturaleza de la invención, así como la manera de realizarse en la práctica, hay que hacer constar la posibilidad de que sus diferentes partes podrán fabricarse en variedad de materiales, tamaños y formas, pudiendo igualmente introducirse en su constitución o procedimiento, aquellas variaciones que la práctica aconseje, siempre y cuando las mismas, no alteren el principio fundamental de la presente invención. Esta descripción detallada se aporta para ayudar a un entendimiento completo de la invención. Por lo tanto, los expertos en la materia reconocerán que variaciones, cambios o modificaciones de las realizaciones descritas aquí pueden llevarse a cabo sin salir del ámbito de protección de la invención. También, la descripción de funciones y elementos sobradamente conocidos se omiten por claridad y concisión. La descripción y los dibujos simplemente ilustran los principios de la invención. Por lo tanto, debe apreciarse que los expertos en la técnica podrán concebir varias disposiciones que, aunque no se hayan descrito o mostrado explícitamente en este documento, representan los principios de la invención y están incluidas dentro de su alcance. Además, todos los ejemplos descritos en este documento se proporcionan principalmente por motivos pedagógicos para ayudar al lector a entender los principios de la invención y los conceptos aportados por el (los) inventor (es) para mejorar la técnica, y deben considerarse como no limitativos con respecto a tales ejemplos y ondiciones descritos de manera específica. Además, todo lo expuesto en este documento relacionado con los principios, aspectos y realizaciones de la invención, así como los ejemplos específicos de los mismos, abarcan equivalencias de los mismos. Aunque la presente invención se ha descrito con referencia a realizaciones específicas, los expertos en la técnica deben entender que los anteriores y diversos otros cambios, omisiones y adiciones en la forma y el detalle de las mismas pueden realizarse sin apartarse del alcance de la invención tal como se definen mediante las reivindicaciones siguientes.
Publicaciones:
ES2912599 (26/05/2022) - A1 Solicitud de patente con informe sobre el estado de la técnica
ES2912599 (25/11/2022) - B2 Patente de invención con examen
Eventos:
En fecha 25/11/2020 se realizó Registro Instancia de Solicitud
En fecha 25/11/2020 se realizó Admisión a Trámite
En fecha 25/11/2020 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 26/11/2020 se realizó Superado examen de oficio
En fecha 25/10/2021 se realizó Realizado IET
En fecha 26/10/2021 se realizó 1109P_Comunicación Traslado del IET
En fecha 15/11/2021 se realizó Anotación Solicitud Cambio de Nombre
En fecha 28/12/2021 se realizó Inscripción de cambio de nombre de titular
En fecha 28/12/2021 se realizó Alta mandatario por inscripción de transmisión F202131117
En fecha 24/03/2022 se realizó 5215P_Observaciones del solicitante al IET, Opinión Escrita y/o alegaciones a observaciones de terceros
En fecha 24/03/2022 se realizó PETEX_Petición de examen sustantivo
En fecha 26/05/2022 se realizó Publicación Solicitud
En fecha 26/05/2022 se realizó Publicación Folleto Solicitud con IET (A1)
En fecha 12/09/2022 se realizó Validación petición y/o pago de examen sustantivo conforme
En fecha 10/11/2022 se realizó Designación de Comisión de Expertos
En fecha 11/11/2022 se realizó Finalización de Examen Sustantivo
En fecha 11/11/2022 se realizó 6121P_Comunicación finalización de examen sustantivo
En fecha 17/11/2022 se realizó Publicación finalización de examen sustantivo
En fecha 18/11/2022 se realizó Concesión con examen sustantivo
En fecha 18/11/2022 se realizó Entrega título
En fecha 18/11/2022 se realizó 6125P_Notificación de concesión con examen sustantivo
En fecha 25/11/2022 se realizó Publicación concesión Patente
En fecha 25/11/2022 se realizó Publicación Folleto Concesión
En fecha 25/05/2023 se realizó Plazo expirado presentación de oposiciones contra la concesión de la Patente
Pagos:
25/11/2020 - Pago Tasas IET
01/12/2022 - Pago 03 Anualidad
01/12/2023 - Pago 04 Anualidad
+ ES-2912599_A11. Sistema para la gestión de un almacén, donde el sistema comprende: - Al menos un sensor de presencia (P) de vehículos de transporte de mercancías, configurado para detectar si un vehículo de transporte de mercancías se encuentra ubicado en una ubicación de carga/descarga; - Al menos un sensor de tráfico (T) de elementos en movimiento, configurado para detectar el cruce de un elemento en movimiento en la ubicación de carga/descarga; - Al menos un procesador electrónico configurado para, para un proceso de carga o de descarga de bultos en la ubicación de carga/descarga, realizar: - Recibir la información capturada por el al menos un sensor (P) de presencia de transporte de mercancías y por el al menos un sensor (T) de tráfico de elementos en movimiento, a través de una red de telecomunicación; - A partir de la información recibida del al menos un sensor de presencia (P) , calcular el tiempo en el que la ubicación de carga/descarga está ocupada y a partir de la información recibida del al menos un sensor de tráfico (T) , mientras la ubicación de carga/descarga está ocupada, determinar el tiempo en que se está trabajando en la ubicación, Ttrabajando, y el tiempo en el que no se está trabajando en la ubicación, Tinactivo, donde está determinación comprende: - Mientras la información recibida del sensor de presencia (P) indica la presencia de un vehículo de transporte de mercancías en la ubicación de carga/descarga, si la diferencia de tiempo entre los momentos en que se producen dos detecciones consecutivas de cruce de algún elemento en movimiento del sensor de tráfico (T) , es menor que un umbral de tiempo predeterminado, se continua incrementando el Ttrabajando; si no, pasado el umbral de tiempo predeterminado, se comienza a incrementar el Tinactivo hasta que se reciba la siguiente señal de dicho sensor de tráfico (T) . ; - Cuando la información recibida del sensor de presencia (P) indica que se ha terminado la presencia del vehículo de transporte de mercancías en la ubicación de carga/descarga, se comienza a incrementar Tinactivo, hasta que llegue una nueva señal del sensor de presencia (P) ; - Obtener a partir de los tiempos calculados, uno o más parámetros de eficiencia del almacén. 2. Sistema según la reivindicación 1, donde el umbral de tiempo predeterminado es igual a un tiempo máximo de carga predeterminado si el proceso es de carga o un tiempo máximo de descarga predeterminado si el proceso es de descarga, más un tiempo de tolerancia predeterminado. 3. Sistema según la reivindicación 2, donde el tiempo máximo de carga predeterminado y el tiempo máximo predeterminado de descarga depende del tipo de bulto. 4. Sistema según cualquiera de las reivindicaciones anteriores, donde el umbral de tiempo predeterminado se obtiene a partir de parámetros de tiempo calculados a partir de la información recibida del al menos un sensor de tráfico (T) en reproducciones de situaciones de carga o descarga del vehículo de transporte de mercancías para cada tipo de bulto, en condiciones ideales. 5. Sistema según cualquiera de las reivindicaciones anteriores donde el umbral predeterminado se obtiene a partir de parámetros de tiempo calculados a partir de la información recibida del al menos un sensor de tráfico (T) en procesos de carga o descarga del vehículo de transporte de mercancías durante un periodo previo de tiempo determinado. 6. Sistema según cualquiera de las reivindicaciones anteriores donde el al menos un sensor (P) de presencia es de tipo inductivo o de tipo fotocélula y el al menos un sensor (T) de tráfico es de tipo fotocélula. 7. Sistema según cualquiera de las reivindicaciones anteriores, donde los parámetros de eficiencia del almacén calculados en cada momento son uno o más de los siguientes: - Eficiencia del proceso de carga, OEEcarga, calculado como: OEEcarga = ( (N° de bultos cargados) x (Ti_carga de cada bulto) ) / (Ttot_carga) ; siendo Ttot_carga el Tiempo Total empleado en la carga del vehículo de mercancías hasta el momento y Ti_carga el tiempo ideal de carga del tipo de bulto en cuestión medido en condiciones ideales u obtenido a partir de un histórico de datos de carga; - Disponibilidad del proceso de carga, DISPcarga, calculado como: DISPcarga = (Tcargando) / ( (Tcargando + Tparado) ) , donde "Tcargando" es la suma del tiempo en el estado "trabajando", Ttrabajando durante un periodo determinado y "Tparado" es la suma del tiempo en el estado "Sin Trabajar", Tinactivo durante el periodo determinado; - Eficiencia del proceso de descarga, OEEdescarga, calculado como: OEEdescarga = ( (N° de bultos descargados) x (Ti_descarga de cada bulto) ) / (Ttot_descarga) ; siendo Ttot_carga" el Tiempo Total empleado en la descarga del vehículo de mercancías hasta el momento y Ti_descarga el tiempo ideal de descarga del tipo de bulto en cuestión medido en condiciones ideales u obtenido a partir de un histórico de datos de descarga; - Disponibilidad del proceso de descarga, DISPdescarga, calculado como: DISPdescarga = (Tdescargando) / ( (Tdescargando + Tparado) ) , donde "Tcargando" es la suma del tiempo en el estado "trabajando", Ttrabajando durante el periodo determinado y "Tparado" es la suma del tiempo en el estado "Sin Trabajar", Tinactivo, durante el periodo determinado; 8. Sistema según cualquiera de las reivindicaciones anteriores, donde el al menos un procesador está además configurado para: - calcular el tiempo transcurrido desde que se detecta que un vehículo de transporte de mercancías entra en las instalaciones donde se encuentra el almacén hasta que un sensor de presencia (P) detecta que dicho vehículo de transporte de mercancías se encuentra ubicado en una ubicación de carga/descarga. 9. Sistema según la reivindicación 8, donde la detección de que un vehículo de transporte de mercancías entra en las instalaciones se obtiene a partir de información de un sensor de localización (L) ubicado en el vehículo de transporte de mercancías, a partir de un sensor lector de matrículas configurado para detectar la matrícula de vehículos de transporte de mercancías que entran en las instalaciones donde se encuentra el almacén o a partir de información introducida por un operario del almacén en un dispositivo electrónico a través de un interfaz de usuario. 10. Sistema según cualquiera de las reivindicaciones anteriores, donde el sistema además comprende: - Al menos un sensor de movimiento (M1) configurado para detectar cuando una carretilla de transporte de bultos del almacén, está parada o en movimiento y al menos un sensor de volumen y/o peso (V) configurado para detectar cuando una carretilla de transporte de bultos lleva carga o no y las características de volumen y/o peso transportado; - Donde el al menos un procesador electrónico está además configurado para recibir la información capturada por el al menos un sensor de movimiento (M1) y/o del al menos un sensor de volumen y/o peso (V) a través de la red de telecomunicación y determinar, a partir de esta información, el tiempo en que una carretilla de transporte de bultos está con carga y el volumen y/o peso que una carretilla transporta en cada momento, el tiempo en que una carretilla de transporte de bultos está parada y el tiempo en que una carretilla de transporte de bultos está en movimiento. 11. Sistema según la reivindicación 10, donde la causa de la parada de la carretilla de transporte de bultos se determina a partir de información de sensores o a partir de información introducida por un operario del almacén en un dispositivo electrónico a través de un interfaz de usuario. 12. Sistema según cualquiera de las reivindicaciones anteriores, donde el al menos un procesador electrónico está además configurado para determinar el espacio recorrido por una carretilla del almacén, a partir de información recibida a través de la red de telecomunicación de al menos un sensor de localización (U1) configurado para detectar la localización de una carretilla de transporte de bultos o de la información recibida a través de la red de telecomunicación de al menos un sensor de espacio recorrido (E1) configurado para detectar metros recorridos por una carretilla de transporte de bultos. 13. Sistema según cualquiera de las reivindicaciones anteriores, donde el sistema además comprende: - Al menos un sensor de movimiento (M2) configurado para detectar cuando un terminal de recogida/colocación de bultos del almacén está parado o en movimiento; - Donde el al menos un procesador electrónico está además configurado para recibir la información capturada por el al menos un sensor de movimiento (M2) a través de la red de telecomunicación y determinar, a partir de esta información, el tiempo en que un terminal de recogida/colocación de bultos está parado y el tiempo en que un terminal de recogida/colocación de bultos está en movimiento. 14. Sistema según la reivindicación 13, donde la causa de una parada en un terminal de recogida/colocación de bultos se determina a partir de información de sensores o de información introducida por un operario del almacén en un dispositivo electrónico a través de un interfaz de usuario. 15. Sistema según cualquiera de las reivindicaciones anteriores, donde el al menos un procesador electrónico está además configurado para determinar el espacio recorrido por un terminal de recogida/colocación de bultos del almacén, a partir de información recibida a través de la red de telecomunicación de al menos un sensor de localización (U2) configurado para detectar la localización de terminal de recogida/colocación de bultos o de la información recibida a través de la red de telecomunicación de al menos un sensor de espacio recorrido (E2) configurado para detectar metros recorridos por terminal de recogida/colocación de bultos. 16. Sistema según cualquiera de las reivindicaciones anteriores, donde el al menos un procesador electrónico está además configurado para asociar a cada tipo de bulto, los tiempos y/o parámetros calculados por el al menos un procesador electrónico, . 17. Sistema según cualquiera de las reivindicaciones anteriores, donde al menos un dispositivo electrónico presenta uno o más de los tiempos y/o parámetros calculados por el al menos un procesador electrónico, mediante un interfaz de usuario del dispositivo. 18. Sistema según cualquiera de las reivindicaciones anteriores, donde los parámetros calculados por al menos un dispositivo electrónico se relacionan automáticamente con los datos del componente (C) que recoge o coloca una carretilla o terminal. 19. Método para la gestión de un almacén, donde el método comprende para un proceso de carga o de descarga de bultos en una ubicación de carga/descarga del almacén, los siguientes pasos realizados por uno o más procesadores electrónicos: a) Recibir la información capturada por al menos un sensor (P) de presencia de transporte de mercancías a través de una red de telecomunicación, donde el al menos un sensor de presencia (P) de vehículos de transporte de mercancías está configurado para detectar si un vehículo de transporte de mercancías se encuentra ubicado en la ubicación de carga/descarga b) Recibir la información capturada por al menos un sensor (T) de tráfico de elementos en movimiento, a través de la red de telecomunicación, donde el al menos un sensor de tráfico (T) de elementos en movimiento está configurado para detectar el cruce de un elemento en movimiento en la ubicación de carga/descarga; c) A partir de la información recibida del al menos un sensor de presencia (P) , calcular el tiempo en el que la ubicación de carga/descarga está ocupada y a partir de la información recibida del al menos un sensor de tráfico (T) , determinar dentro de ese tiempo, el tiempo en que se está trabajando en la ubicación, Ttrabajando, y el tiempo en el que no se está trabajando en la ubicación, Tinactivo, mediante los siguientes pasos: c1) Mientras la información recibida del sensor de presencia (P) indica la presencia de un vehículo de transporte de mercancías en la ubicación de carga/descarga, si la diferencia de tiempo entre los momentos en que se producen dos detecciones consecutivas de cruce de algún elemento en movimiento del sensor de tráfico (T) , es menor que un umbral de tiempo predeterminado, se continua incrementando el Ttrabajando; si no, pasado el umbral de tiempo predeterminado, se comienza a incrementar el Tinactivo hasta que se reciba la siguiente señal de dicho sensor de tráfico (T) ; c2) Cuando la información recibida del sensor de presencia (P) indica que se ha terminado la presencia del vehículo de transporte de mercancías en la ubicación de carga/descarga, se comienza a incrementar Tinactivo, hasta que llegue una nueva señal del sensor de presencia (P) . d) Obtener a partir de los tiempos calculados, uno o más parámetros de eficiencia del almacén. 20. Un producto de programa de ordenador que comprende instrucciones ejecutables por ordenador para realizar el procedimiento según cualquiera de la reivindicación 18, cuando el programa es ejecutado en un ordenador.
+ ES-2912599_B21. Sistema para la gestión de un almacén, donde el sistema comprende: - Al menos un sensor de presencia (P) de vehículos de transporte de mercancías, configurado para detectar si un vehículo de transporte de mercancías se encuentra ubicado en una ubicación de carga/descarga; - Al menos un sensor de tráfico (T) de elementos en movimiento, configurado para detectar el cruce de un elemento en movimiento en la ubicación de carga/descarga; - Al menos un procesador electrónico configurado para, para un proceso de carga o de descarga de bultos en la ubicación de carga/descarga, realizar: - Recibir la información capturada por el al menos un sensor (P) de presencia de transporte de mercancías y por el al menos un sensor (T) de tráfico de elementos en movimiento, a través de una red de telecomunicación; - A partir de la información recibida del al menos un sensor de presencia (P) , calcular el tiempo en el que la ubicación de carga/descarga está ocupada y a partir de la información recibida del al menos un sensor de tráfico (T) , mientras la ubicación de carga/descarga está ocupada, determinar el tiempo en que se está trabajando en la ubicación, Ttrabajando, y el tiempo en el que no se está trabajando en la ubicación, Tinactivo, donde está determinación comprende: - Mientras la información recibida del sensor de presencia (P) indica la presencia de un vehículo de transporte de mercancías en la ubicación de carga/descarga, si la diferencia de tiempo entre los momentos en que se producen dos detecciones consecutivas de cruce de algún elemento en movimiento del sensor de tráfico (T) , es menor que un umbral de tiempo predeterminado, se continua incrementando el Ttrabajando; si no, pasado el umbral de tiempo predeterminado, se comienza a incrementar el Tinactivo hasta que se reciba la siguiente señal de dicho sensor de tráfico (T) . ; - Cuando la información recibida del sensor de presencia (P) indica que se ha terminado la presencia del vehículo de transporte de mercancías en la ubicación de carga/descarga, se comienza a incrementar Tinactivo, hasta que llegue una nueva señal del sensor de presencia (P) ; - Obtener a partir de los tiempos calculados, uno o más de los siguientes parámetros de eficiencia del almacén: - Eficiencia del proceso de carga, OEEcarga, calculado como: OEEcarga = ( (N° de bultos cargados) x (Ti_carga de cada bulto) ) / (Ttot_carga) ; siendo Ttot_carga el Tiempo Total empleado en la carga del vehículo de mercancías hasta el momento y Ti_carga el tiempo ideal de carga del tipo de bulto en cuestión medido en condiciones ideales u obtenido a partir de un histórico de datos de carga; - Disponibilidad del proceso de carga, DISPcarga, calculado como: DISPcarga = (Tcargando) / ( (Tcargando + Tparado) ) , donde "Tcargando" es la suma del tiempo en el estado "trabajando", Ttrabajando durante un periodo determinado y "Tparado" es la suma del tiempo en el estado "Sin Trabajar", Tinactivo durante el periodo determinado; - Eficiencia del proceso de descarga, OEEdescarga, calculado como: OEEdescarga = ( (N° de bultos descargados) x (Ti_descarga de cada bulto) (Ttot_descarga) ; siendo Ttot_carga" el Tiempo Total empleado en la descarga del vehículo de mercancías hasta el momento y Ti_descarga el tiempo ideal de descarga del tipo de bulto en cuestión medido en condiciones ideales u obtenido a partir de un histórico de datos de descarga; - Disponibilidad del proceso de descarga, DISPdescarga, calculado como: DISPdescarga = (Tdescargando) / ( (Tdescargando + Tparado) ) , donde "Tcargando" es la suma del tiempo en el estado "trabajando", Ttrabajando durante el periodo determinado y "Tparado" es la suma del tiempo en el estado "Sin Trabajar", Tinactivo, durante el periodo determinado; 2. Sistema según la reivindicación 1, en el que los parámetros de eficiencia del almacén se obtienen monitorizando, al menos, uno de los siguientes factores: - el tráfico de personas y carretillas en la ubicación de carga o descarga; - el tráfico de vehículos de transporte interno (carretillas) ; - el proceso de funcionamiento de los terminales manuales de datos (picking) . 3. Sistema según las reivindicaciones anteriores, donde el umbral de tiempo predeterminado es igual a un tiempo máximo de carga predeterminado si el proceso es de carga o un tiempo máximo de descarga predeterminado si el proceso es de descarga, más un tiempo de tolerancia predeterminado. 4. Sistema según la reivindicación 3, donde el tiempo máximo de carga predeterminado y el tiempo máximo predeterminado de descarga depende del tipo de bulto. 5. Sistema según cualquiera de las reivindicaciones anteriores, donde el umbral de tiempo predeterminado se obtiene a partir de parámetros de tiempo calculados a partir de la información recibida del al menos un sensor de tráfico (T) en reproducciones de situaciones de carga o descarga del vehículo de transporte de mercancías para cada tipo de bulto, en condiciones ideales. 6. Sistema según cualquiera de las reivindicaciones anteriores donde el umbral predeterminado se obtiene a partir de parámetros de tiempo calculados a partir de la información recibida del al menos un sensor de tráfico (T) en procesos de carga o descarga del vehículo de transporte de mercancías durante un periodo previo de tiempo determinado. 7. Sistema según cualquiera de las reivindicaciones anteriores donde el al menos un sensor (P) de presencia es de tipo inductivo o de tipo fotocélula y el al menos un sensor (T) de tráfico es de tipo fotocélula. 8. Sistema según cualquiera de las reivindicaciones anteriores, donde el al menos un procesador está además configurado para calcular el tiempo transcurrido desde que se detecta que un vehículo de transporte de mercancías entra en las instalaciones donde se encuentra el almacén hasta que un sensor de presencia (P) detecta que dicho vehículo de transporte de mercancías se encuentra ubicado en una ubicación de carga/descarga. 9. Sistema según la reivindicación 8, donde la detección de que un vehículo de transporte de mercancías entra en las instalaciones se obtiene a partir de información de un sensor de localización (L) ubicado en el vehículo de transporte de mercancías, a partir de un sensor lector de matrículas configurado para detectar la matrícula de vehículos de transporte de mercancías que entran en las instalaciones donde se encuentra el almacén o a partir de información introducida por un operario del almacén en un dispositivo electrónico a través de un interfaz de usuario. 10. Sistema según cualquiera de las reivindicaciones anteriores, donde el sistema, además, comprende: - Al menos un sensor de movimiento (M1) configurado para detectar cuando una carretilla de transporte de bultos del almacén está parada o en movimiento y al menos un sensor de volumen y/o peso (V) configurado para detectar cuando una carretilla de transporte de bultos lleva carga o no y las características de volumen y/o peso transportado; - Donde el al menos un procesador electrónico está además configurado para recibir la información capturada por el al menos un sensor de movimiento (M1) y/o del al menos un sensor de volumen y/o peso (V) a través de la red de telecomunicación y determinar, a partir de esta información, el tiempo en que una carretilla de transporte de bultos está con carga y el volumen y/o peso que una carretilla transporta en cada momento, el tiempo en que una carretilla de transporte de bultos está parada y el tiempo en que una carretilla de transporte de bultos está en movimiento. 11. Sistema según la reivindicación 10, donde la causa de la parada de la carretilla de transporte de bultos se determina a partir de información de sensores o a partir de información introducida por un operario del almacén en un dispositivo electrónico a través de un interfaz de usuario. 12. Sistema según cualquiera de las reivindicaciones anteriores, donde el al menos un procesador electrónico está además configurado para determinar el espacio recorrido por una carretilla del almacén, a partir de información recibida a través de la red de telecomunicación de al menos un sensor de localización (U1) configurado para detectar la ocalización de una carretilla de transporte de bultos o de la información recibida a través de la red de telecomunicación de al menos un sensor de espacio recorrido (E1) configurado para detectar metros recorridos por una carretilla de transporte de bultos. 13. Sistema según cualquiera de las reivindicaciones anteriores, donde el sistema además comprende: - Al menos un sensor de movimiento (M2) configurado para detectar cuando un terminal de recogida/colocación de bultos del almacén está parado o en movimiento; - Donde el al menos un procesador electrónico está además configurado para recibir la información capturada por el al menos un sensor de movimiento (M2) a través de la red de telecomunicación y determinar, a partir de esta información, el tiempo en que un terminal de recogida/colocación de bultos está parado y el tiempo en que un terminal de recogida/colocación de bultos está en movimiento. 14. Sistema según la reivindicación 13, donde la causa de una parada en un terminal de recogida/colocación de bultos se determina a partir de información de sensores o de información introducida por un operario del almacén en un dispositivo electrónico a través de un interfaz de usuario. 15. Sistema según cualquiera de las reivindicaciones anteriores, donde el al menos un procesador electrónico está además configurado para determinar el espacio recorrido por un terminal de recogida/colocación de bultos del almacén, a partir de información recibida a través de la red de telecomunicación de al menos un sensor de localización (U2) configurado para detectar la localización de terminal de recogida/colocación de bultos o de la información recibida a través de la red de telecomunicación de al menos un sensor de espacio recorrido (E2) configurado para detectar metros recorridos por terminal de recogida/colocación de bultos. 16. Sistema según cualquiera de las reivindicaciones anteriores, donde el al menos un procesador electrónico está además configurado para asociar a cada tipo de bulto, los tiempos y/o parámetros calculados por el al menos un procesador electrónico. 17. Sistema según cualquiera de las reivindicaciones anteriores, donde al menos un dispositivo electrónico presenta uno o más de los tiempos y/o parámetros calculados por el al menos un procesador electrónico, mediante un interfaz de usuario del dispositivo. 18. Sistema según cualquiera de las reivindicaciones anteriores, donde los parámetros calculados por al menos un dispositivo electrónico se relacionan automáticamente con los datos del componente (C) que recoge o coloca una carretilla o terminal. 19. Método para la gestión de un almacén, donde el método comprende para un proceso de carga o de descarga de bultos en una ubicación de carga/descarga del almacén, los siguientes pasos realizados por uno o más procesadores electrónicos: a) Recibir la información capturada por al menos un sensor (P) de presencia de transporte de mercancías a través de una red de telecomunicación, donde el al menos un sensor de presencia (P) de vehículos de transporte de mercancías está configurado para detectar si un vehículo de transporte de mercancías se encuentra ubicado en la ubicación de carga/descarga b) Recibir la información capturada por al menos un sensor (T) de tráfico de elementos en movimiento, a través de la red de telecomunicación, donde el al menos un sensor de tráfico (T) de elementos en movimiento está configurado para detectar el cruce de un elemento en movimiento en la ubicación de carga/descarga; c) A partir de la información recibida del al menos un sensor de presencia (P) , calcular el tiempo en el que la ubicación de carga/descarga está ocupada y a partir de la información recibida del al menos un sensor de tráfico (T) , determinar dentro de ese tiempo, el tiempo en que se está trabajando en la ubicación, Ttrabajando, y el tiempo en el que no se está trabajando en la ubicación, Tinactivo, mediante los siguientes pasos: c1) Mientras la información recibida del sensor de presencia (P) indica la presencia de un vehículo de transporte de mercancías en la ubicación de carga/descarga, si la diferencia de tiempo entre los momentos en que se producen dos detecciones consecutivas de cruce de algún elemento en movimiento del sensor de tráfico (T) , es menor que un umbral de tiempo predeterminado, se continua incrementando el Ttrabajando; si no, pasado el mbral de tiempo predeterminado, se comienza a incrementar el Tinactivo hasta que se reciba la siguiente señal de dicho sensor de tráfico (T) ; c2) Cuando la información recibida del sensor de presencia (P) indica que se ha terminado la presencia del vehículo de transporte de mercancías en la ubicación de carga/descarga, se comienza a incrementar Tinactivo, hasta que llegue una nueva señal del sensor de presencia (P) . d) Obtener a partir de los tiempos calculados, uno o más parámetros de eficiencia del almacén. 20. Un producto de programa de ordenador que comprende instrucciones ejecutables por ordenador para realizar el procedimiento según cualquiera de la reivindicación 18, cuando el programa es ejecutado en un ordenador.
Los productos y servicios protegidos por este registro son:
G06Q 10/08
Descripciones:
+ ES-2912599_A1 SISTEMA Y MÉTODO PARA LA GESTIÓN DE ALMACENES CAMPO TÉCNICO DE LA INVENCIÓN La presente invención se refiere al campo de la gestión y organización de almacenes donde se reciben, se guardan y se distribuyen productos o material de cualquier tipo, es decir, pertenecientes a cualquier sector (automoción, textil, químico, farmacéutico, de construcción o cualquier otro) . Más concretamente, la presente invención propone un sistema y un método que permite una mejora sustancial en la eficiencia del funcionamiento de dichos almacenes, mediante una gestión de los mismos basada en un tratamiento y procesado optimizado de información recogida por distintos sensores de monitorización de la actividad en dichos almacenes. ANTECEDENTES DE LA INVENCIÓN La gestión de almacenes donde se guardan gran cantidad de productos es una tarea compleja, ya que en un almacén se realizan numerosas actividades (carga, descarga, almacenamiento de productos, extracción de productos, identificación de los mismos, transporte de los productos dentro del almacén...) , muchas veces de manera simultánea. Es importante el control de todas estas actividades para que se realicen correctamente y en el menor tiempo posible, de manera que el almacén funcione de la manera más rápida, eficiente y correcta posible. En la actualidad, los almacenes se gestionan de manera rudimentaria, en la mayor parte de los casos de manera manual y cuando se hace de manera digitalizada y automatizada, no se realiza de forma eficiente. Hay que tener en cuenta, que en general, en estos almacenes los productos cambian constantemente, así como las cantidades y ubicaciones de los mismos, por lo que en la mayoría de los casos no existen patrones de comportamiento. Así algunos de los problemas que se pueden encontrar actualmente en los almacenes son, entre otros: - Los camiones (o cualquier otro vehículo que se use para transporte de productos) ocupan demasiado tiempo el muelle de carga/descarga del almacén, debido por ejemplo al tiempo ue se tarda en cargar o descargar los productos o al tiempo que tarda el camión en posicionarse en el muelle. Esto causa una utilización no eficiente de los muelles (o portones o similares) de carga/descarga del almacén; haciendo que el número de camiones que se carga/descarga en un determinado muelle durante el día sea bajo. - Las carretillas (o cualquier otro vehículo de transporte interno en el almacén) , tardan demasiado en el transporte de los productos debido por ejemplo a que no está optimizado la distancia que deben recorrer o porque no pueden transportar suficiente cantidad de productos. - Algo similar pasa con los terminales de colocación y recogida de objetos en las estanterías (denominados por el término inglés "picking") que tardan demasiado en la recogida o colocación de cada producto. Por todos estos problemas (y otros que no se han citado aquí) en la actualidad la gestión de almacenes se realiza de manera poco eficiente. Por esta razón, existe la necesidad de un procedimiento y sistema de gestión de almacenes que solucione todos estos problemas y que, en general, permita una gestión de almacenes eficiente, rápida y que implique ahorro de recursos. SUMARIO DE LA INVENCIÓN El objetivo de la presente invención es el de desarrollar un sistema y método de gestión (y monitorización) de almacenes mediante uno o varios sensores de monitorización y uno o varios algoritmos de procesado, que permiten obtener parámetros para la mejora de la eficiencia de algunos de los recursos más relevantes de un almacén y, en general, que mejoran la eficiencia en la gestión del almacén resolviendo, entre otros los problemas anteriormente expuestos. La presente invención puede aplicarse a cualquier tipo de almacén que almacena cualquier tipo de objetos, tanto de propósito logístico (almacenes logísticos, receptores y distribuidores de productos, pertenecientes estos a cualquier sector: automoción, textil, químico, farmacéutico, etc.) como de propósito industrial (almacenes internos de una determinada fábrica, o externos a la misma, que realizan la recepción y distribución de productos o componentes a cualquier proceso industrial) . Con el método y sistema propuesto, se pueden conseguir las siguientes ventajas técnicas, entre otras: • En los muelles de carga de los almacenes (o portones o similar) : reducción de los tiempos de utilización. Los camiones serán cargados o descargados en menos tiempo, por lo que los muelles podrán ser utilizados por más camiones en el mismo tiempo. • En los camiones (u otros vehículos similares) reducción de los tiempos de carga y descarga de los productos, así como de las ineficiencias asociadas a dichos procesos. • Reducción de los tiempos de posicionamiento de los camiones en los muelles; esto es, del tiempo que tarda el camión en llegar y posicionarse en el muelle asignado. • En las carretillas (o vehículos similares) , reducción de los tiempos de transporte y de los espacios recorridos, aumento de los volúmenes y pesos transportados, así como reducción de otras ineficiencias asociadas a dichos procesos. • En los terminales manuales de recogida/colocación de objetos ("picking" o similar) si los hubiera, reducción del tiempo empleado durante la recogida/colocación y de los espacios recorridos por los terminales, así como de otras ineficiencias asociadas a dichos procesos. En un primer aspecto, la presente invención propone un sistema para la gestión de un almacén, donde el sistema comprende: - Al menos un sensor de presencia (P) de vehículos de transporte de mercancías (por ejemplo, camiones) , configurado para detectar si un vehículo de transporte de mercancías se encuentra (correctamente) ubicado en una ubicación de carga/descarga (por ejemplo, un muelle o portón) ; - Al menos un sensor de tráfico (T) de elementos en movimiento, configurado para detectar el cruce de un elemento en movimiento (por ejemplo, una persona o una carretilla) en la ubicación de carga/descarga; - Al menos un procesador electrónico configurado para, en un proceso de carga o de descarga de bultos (de un tipo o tipos determinados) y en la ubicación de carga/descarga, realizar: - Recibir la información capturada por el al menos un sensor (P) de presencia de transporte de mercancías y por el al menos un sensor (T) de tráfico de elementos en movimiento, a través de una red de telecomunicación; - A partir de la información recibida del al menos un sensor de presencia (P) , calcular el tiempo en el que la ubicación de carga/descarga está ocupada y a partir de la información recibida del al menos un sensor de tráfico (T) , mientras la ubicación de carga/descarga está ocupada, determinar el tiempo en que se está trabajando en la ubicación, Ttrabajando, y el tiempo en el que no se está trabajando en la ubicación, Tinactivo, donde esta determinación comprende: - Mientras la información recibida del sensor de presencia (P) indica la presencia de un vehículo de transporte de mercancías en la ubicación de carga/descarga, si la diferencia de tiempo entre los momentos en que se producen dos detecciones consecutivas de cruce de algún elemento en movimiento del sensor de tráfico (T) , es menor que un umbral de tiempo predeterminado, se continua incrementando el Ttrabajando; si no, pasado el umbral de tiempo predeterminado, se comienza a incrementar el Tinactivo hasta que se reciba la siguiente señal de dicho sensor de tráfico (T) . ; - Cuando la información recibida del sensor de presencia (P) indica que se ha terminado la presencia del vehículo de transporte de mercancías en la ubicación de carga/descarga, se comienza a incrementar Tinactivo, hasta que llegue una nueva señal del sensor de presencia (P) ; - Obtener a partir de los tiempos calculados, uno o más parámetros de eficiencia del almacén. El umbral de tiempo predeterminado puede ser un tiempo máximo de carga predeterminado si el proceso es de carga o un tiempo máximo de descarga predeterminado si el proceso es de descarga, más un tiempo de tolerancia predeterminado; el tiempo máximo de carga o de descarga puede depender del tipo de bulto. El umbral de tiempo predeterminado se puede obtener a partir de parámetros de tiempo calculados a partir de la información recibida del al menos un sensor de tráfico (T) en eproducciones de situaciones de carga o descarga de un vehículo de transporte de mercancías para cada tipo de bulto, en condiciones ideales. También se puede obtener a partir de parámetros de tiempo calculados a partir de la información recibida del al menos un sensor de tráfico (T) en situaciones reales de carga o descarga de un vehículo de transporte de mercancías durante un periodo previo de tiempo determinado. El al menos un sensor (P) de presencia puede ser de tipo inductivo o de tipo fotocélula y el sensor (T) de tráfico puede ser de tipo fotocélula. Los parámetros de eficiencia del almacén calculados en cada momento pueden ser uno o más de los siguientes (esto es un ejemplo y otros parámetros de eficiencia pueden usarse) : - Eficiencia del proceso de carga, OEEcarga, calculado como: OEEcarga = ( (N° de bultos cargados) x (Ti_carga de cada bulto) ) / (Ttot_carga) ; siendo Ttot_carga el Tiempo Total empleado en la carga del vehículo de mercancías hasta el momento y Ti_carga el tiempo ideal de carga del tipo de bulto en cuestión medido en condiciones ideales u obtenido a partir de un histórico de datos de carga; - Disponibilidad del proceso de carga, DISPcarga, calculado como: DISPcarga = (Tcargando) / ( (Tcargando + Tparado) ) , donde "Tcargando" es la suma del tiempo en el estado "trabajando", Ttrabajando durante un periodo determinado y "Tparado" es la suma del tiempo en el estado "Sin Trabajar", Tinactivo durante el periodo determinado; - Eficiencia del proceso de descarga, OEEdescarga, calculado como: OEEdescarga = ( (N° de bultos descargados) x (Ti_descarga de cada bulto) ) / (Ttot_descarga) ; siendo Ttot_descarga" el Tiempo Total empleado en la descarga del vehículo de mercancías hasta el momento y Ti_descarga el tiempo ideal de descarga del tipo de bulto en cuestión medido en condiciones ideales u obtenido a partir de un histórico de datos de descarga; - Disponibilidad del proceso de descarga, DISPdescarga, calculado como: DISPdescarga = (Tdescargando) / ( (Tdescargando + Tparado) ) , donde "Tdescargando" es la suma del tiempo en el estado "trabajando", Ttrabajando durante el periodo determinado y "Tparado" es la suma del tiempo en el estado "Sin Trabajar", Tinactivo, durante el periodo determinado; En una realización, el al menos un procesador está además configurado para: - calcular el tiempo transcurrido desde que se detecta que un vehículo de transporte de mercancías entra en las instalaciones donde se encuentra el almacén hasta que un sensor de presencia (P) detecta que dicho vehículo de transporte de mercancías se encuentra ubicado en una ubicación de carga/descarga. La detección de que un vehículo de transporte de mercancías entra en las instalaciones se puede obtener a partir de información de un sensor de localización (L) ubicado en el vehículo de transporte de mercancías, a partir de un sensor lector de matrículas configurado para detectar la matrícula de vehículos de transporte de mercancías que entran en las instalaciones donde se encuentra el almacén o a partir de información introducida por un operario del almacén en un dispositivo electrónico a través de un interfaz de usuario. El sistema además puede comprender: - Al menos un sensor de movimiento (M1) configurado para detectar cuando una carretilla de transporte de bultos del almacén, está parada o en movimiento y al menos un sensor de volumen y/o peso (V) configurado para detectar cuando una carretilla de transporte de bultos lleva carga o no y las características de volumen y/o peso transportado; - Donde el al menos un procesador electrónico está además configurado para recibir la información capturada por el al menos un sensor de movimiento (M1) y/o del al menos un sensor de volumen y/o peso (V) a través de la red de telecomunicación y determinar, a partir de esta información, el tiempo en que una carretilla de transporte de bultos está con carga y el volumen y/o peso que una carretilla transporta en cada momento, el tiempo en que una carretilla de transporte de bultos está parada y el tiempo en que una carretilla de transporte de bultos está en movimiento. El al menos un procesador electrónico puede estar además configurado para determinar el espacio recorrido por una carretilla del almacén, a partir de información recibida a través de la red de telecomunicación de al menos un sensor de localización (U1) configurado para detectar la localización de una carretilla de transporte de bultos o de la información recibida a través de la red de telecomunicación de al menos un sensor de espacio recorrido (E1) configurado para detectar metros recorridos por una carretilla de transporte de bultos. En una realización, el sistema además comprende: - Al menos un sensor de movimiento (M2) configurado para detectar cuando un terminal de recogida/colocación de bultos del almacén está parado o en movimiento; - Donde el al menos un procesador electrónico está además configurado para recibir la información capturada por el al menos un sensor de movimiento (M2) a través de la red de telecomunicación y determinar, a partir de esta información, el tiempo en que un terminal de recogida/colocación de bultos está parado y el tiempo en que un terminal de recogida/colocación de bultos está en movimiento. La causa de la parada de la carretilla de transporte de bultos o del terminal de recogida/colocación de bultos se puede determinar a partir de información de sensores o a partir de información introducida por un operario del almacén en un dispositivo electrónico a través de un interfaz de usuario. El al menos un procesador electrónico puede estar además configurado para determinar el espacio recorrido por un terminal de recogida/colocación de bultos del almacén, a partir de información recibida a través de la red de telecomunicación de al menos un sensor de localización (U2) configurado para detectar la localización de terminal de recogida/colocación de bultos o de la información recibida a través de la red de telecomunicación de al menos un sensor de espacio recorrido (E2) configurado para detectar metros recorridos por terminal de recogida/colocación de bultos. El al menos un procesador electrónico puede estar además configurado para asociar a cada tipo de bulto, los tiempos y/o parámetros calculados por el al menos un procesador electrónico. Al menos un dispositivo electrónico puede presentar a un usuario, uno o más de los tiempos y/o parámetros calculados por el al menos un procesador electrónico, mediante un interfaz de usuario del dispositivo (mediante gráficos, tablas, o cualquier otro tipo de formato) . En un segundo aspecto, la presente invención propone un método para la gestión de un almacén, donde el método comprende para un proceso de carga o de descarga de bultos en una ubicación de carga/descarga del almacén, los siguientes pasos realizados por uno o más procesadores electrónicos: a) Recibir la información capturada por al menos un sensor (P) de presencia de transporte de mercancías a través de una red de telecomunicación, donde el al menos un sensor de presencia (P) de vehículos de transporte de mercancías está configurado para detectar si un vehículo de transporte de mercancías se encuentra ubicado en la ubicación de carga/descarga b) Recibir la información capturada por al menos un sensor (T) de tráfico de elementos en movimiento, a través de la red de telecomunicación, donde el al menos un sensor de tráfico (T) de elementos en movimiento está configurado para detectar el cruce de un elemento en movimiento en la ubicación de carga/descarga; c) A partir de la información recibida del al menos un sensor de presencia (P) , calcular el tiempo en el que la ubicación de carga/descarga está ocupada y a partir de la información recibida del al menos un sensor de tráfico (T) , determinar dentro de ese tiempo, el tiempo en que se está trabajando en la ubicación, Ttrabajando, y el tiempo en el que no se está trabajando en la ubicación, Tinactivo, mediante los siguientes pasos: c1) Mientras la información recibida del sensor de presencia (P) indica la presencia de un vehículo de transporte de mercancías en la ubicación de carga/descarga, si la diferencia de tiempo entre los momentos en que se producen dos detecciones consecutivas de cruce de algún elemento en movimiento del sensor de tráfico (T) , es menor que un umbral de tiempo predeterminado, se continua incrementando el Ttrabajando; si no, pasado el umbral de tiempo predeterminado, se comienza a incrementar el Tinactivo hasta que se reciba la siguiente señal de dicho sensor de tráfico (T) ; c2) Cuando la información recibida del sensor de presencia (P) indica que se ha terminado la presencia del vehículo de transporte de mercancías en la ubicación de carga/descarga, se comienza a incrementar Tinactivo, hasta que llegue una nueva señal del sensor de presencia (P) . d) Obtener a partir de los tiempos calculados, uno o más parámetros de eficiencia del almacén. Finalmente, en un tercer aspecto de la invención se presenta un programa de ordenador que comprende instrucciones ejecutables por ordenador para implementar el método descrito, al jecutarse en el sistema. Dichas instrucciones pueden estar almacenadas en un medio de almacenamiento de datos digitales. Para un entendimiento más completo de la invención, sus objetos y ventajas, puede tenerse referencia a la siguiente memoria descriptiva y a los dibujos adjuntos. DESCRIPCIÓN DE LOS DIBUJOS Para complementar la descripción que se está realizando y con objeto de ayudar a una mejor comprensión de las características de la invención, de acuerdo con unos ejemplos preferentes de realizaciones prácticas de la misma, se acompaña como parte integrante de esta descripción un juego de dibujos en donde, con carácter ilustrativo y no limitativo, se ha representado lo siguiente: La Figura 1 muestra de manera esquemática un almacén donde se aplica el sistema y método propuesto de acuerdo a una realización de la invención. DESCRIPCIÓN DETALLADA DE LA INVENCIÓN La presente invención propone un sistema y método para la gestión de un almacén, basado en sensores de monitorización y en el procesado de los datos obtenidos de dichos sensores (aplicando determinados algoritmos) . La presente invención es aplicable a cualquier tipo de almacén (o más generalmente hablando, instalación de almacenamiento) que puede almacenar cualquier tipo de objetos: cualquier tipo de material o productos de cualquier tipo como componentes, alimentos, fármacos, telas...o cualquier otro tipo de objeto. La figura 1 muestra esquemáticamente (a modo de ejemplo no limitativo) un almacén (1) genérico donde se puede aplicar el método y sistema de la presente invención. En dicho almacén hay N estanterías (11...1N, con N>=1) , o en general N estructuras de cualquier tipo donde se pueden almacenar objetos. El almacén también dispone de una o más ubicaciones de carga y descarga (muelles, portones.o cualquier tipo de instalación donde se realice la carga y/o descarga de objetos para su salida y/o entrada respectivamente, en el almacén) . En el ejemplo de la figura 1, existen 3 muelles y 2 portones (esto es solo un ejemplo, el número de muelles y portones son parámetros propios de cada almacén) a través de los cuales los vehículos (20) de carga/descarga (generalmente camiones) cargarán o descargarán los bjetos, y una o más carretillas (30) de transporte de bultos. Con el término genérico de carretillas, nos referimos a cualquier vehículo que se use para el transporte interno de los bultos dentro del almacén o de las instalaciones (es decir, para desplazar los objetos o bultos por el interior del almacén desde el camión a las estanterías en el caso de la descarga o desde las estanterías al camión en el caso de carga o incluso entre camiones) . El almacén también puede disponer de uno o más terminales (40) para realizar la recogida o la colocación de los objetos (individuales o normalmente agrupados en bultos) en las estanterías (llamados terminales de "picking", usando el término inglés) . Como se ve en la figura 1, se pueden disponer de varios sensores para capturar distintos tipos de datos relacionados con recursos del almacén y, en general, datos del funcionamiento del almacén. En la figura 1 aparecen varios tipos de sensores pero no todos son obligatorios en todos las realizaciones de la invención (es decir, se pueden usar opcionalmente uno o varios tipos de los sensores que aparecen en la figura 1, dependiendo de la realización de la invención) . Los datos de los distintos sensores usados se recogen por uno o más dispositivos electrónicos (llamados genéricamente, dispositivos de recogida de datos) y, generalmente, se almacenan en una o más bases de datos para su procesado en uno o más procesadores electrónicos (mediante uno o más algoritmos que se expondrán más adelante) para mejorar la eficiencia de la gestión del almacén. Estos dispositivos de recogida de datos pueden formar parte de los dispositivos electrónicos de explotación (de los que se hablará más adelante) o pueden no formar parte de ellos sino enviarle a su vez los datos, a través de cualquier red de telecomunicación, a los dispositivos electrónicos de explotación. Algunos de los distintos sensores que se pueden usar son (esto es solo un ejemplo no limitativo, se pueden usar otro tipo de sensores y no es obligatorio el uso de todos los tipos de sensores que se exponen a continuación) : - Uno o más sensores (P) para detectar la posición/presencia de un camión (en general, de cualquier vehículo de transporte de mercancías) en una ubicación de carga/descarga (por ejemplo, un muelle o portón) . Puede ser, por ejemplo, del tipo fotocélula, inductivo, o de cualquier otro tipo. Con este sensor se detecta si un camión está ubicado en la ubicación de carga/descarga (muelle/portón) de manera correcta, es decir, listo para cargar o descargar. La información capturada por dicho sensor se enviará al dispositivo de recogida de datos del almacén, mediante cualquier tipo de red de telecomunicaciones (cableada o inalámbrica) . - Uno o más sensores (T) de tráfico de personas o carretillas (o más genéricamente, de elementos en movimiento) en cada ubicación de carga/descarga, para detectar si se está cargando o descargando el camión (o generalmente hablando el vehículo de transporte de mercancías) . Este sensor puede ser de tipo fotocélula o de cualquier otro tipo. Cada vez que cruce un elemento en movimiento (por ejemplo, una persona o carretilla) hacia el interior/exterior del camión, se detectará dicho cruce, por ejemplo, cortando el haz de luz de la fotocélula. El procesado de los datos recogidos por este sensor (mediante un algoritmo que se explicará más adelante) permite detectar cuándo se está cargando/ descargando el camión, conforme se explica más adelante. La información capturada por dicho sensor se enviará al dispositivo de recogida de datos del almacén, mediante cualquier tipo de red de telecomunicaciones (cableada o inalámbrica) . - Uno o más sensores (L) para detectar la localización de cada camión. Este sensor puede ser por ejemplo del tipo de Sistema de Posicionamiento Global (GPS de sus siglas en inglés) o de cualquier otro tipo. Típicamente irá ubicado en el vehículo de transporte de mercancías (típicamente un camión) ; el vehículo enviará la información de dicho sensor al dispositivo de recogida de datos del almacén, mediante cualquier tipo de red de telecomunicaciones (cableada o inalámbrica) . - Uno o más sensores (R) para leer la matrícula de los vehículos de transporte de mercancías que van a realizar carga/descarga en el almacén. Este sensor puede estar situado en cada uno de los muelles o en las puertas de entrada de en las instalaciones donde se encuentra el almacén, detectando la matrícula de los vehículos (camiones) que entran en dichas instalaciones. La información capturada por dicho sensor se enviará al dispositivo de recogida de datos del almacén, mediante cualquier tipo de red de telecomunicaciones (cableada o inalámbrica) . - Uno o más sensores de movimiento (M1) , preferiblemente colocados en cada una de las carretillas para detectar cuándo una carretilla está parada o en movimiento. También se pueden usar sensores de movimiento (M2) , preferiblemente cada uno de los terminales de recogida/colocación (terminales de "picking") , para monitorizar su movimiento (y detectar cuándo el terminal está parado o en movimiento) . - Uno o más sensores de volumen y/o peso colocado en cada una de las carretillas (V) para detectar cuándo cada carretilla lleva carga o no, las características de volumen y/o peso transportado, así como cuando carga o descarga sus bultos (u objetos) . La información capturada por dicho sensor se enviará al dispositivo de recogida de datos del almacén, mediante cualquier tipo de red de telecomunicaciones (cableada o inalámbrica) . - Uno o más sensores de localización para detectar la localización de cada carretilla (U1) o de cada terminal de recogida/colocación (U2) . Este sensor puede ser por ejemplo del tipo de Sistema de Posicionamiento Global (GPS de sus siglas en inglés) o de cualquier otro tipo. Este sensor típicamente irá ubicado en cada carretilla o terminal, que puede enviar la información de dicho sensor (por ejemplo, en tiempo real) al dispositivo de recogida de datos del almacén (y de ahí al dispositivo de explotación sino es el mismo) , mediante cualquier tipo de red de telecomunicaciones (cableada o inalámbrica) .. - Uno o más sensores de espacio recorrido para calcular metros recorridos por cada carretilla (E1) o terminal de recogida/colocación (E2) . En una realización, este sensor no es necesario como tal, sino que a partir de la información recogida por cada sensor de localización (U1, U2) , se calculan los metros recorridos por cada carretilla o terminal. En una realización el sistema se compone de dos tipos de elementos fundamentales, por un lado, los sensores (uno o más de los expuestos anteriormente) y, por otro los dispositivos electrónicos de explotación de la información monitorizada por los sensores. Dichos dispositivos electrónicos de explotación pueden ser cualquier dispositivo con uno o más procesadores electrónicos de cualquier tipo (por ejemplo, un servidor, un smartphone o de cualquier otro tipo) donde se recogen/reciben esos datos, se almacenan permanente o temporalmente (en bases de datos externas o internas al dispositivo) y se procesan (mediante uno o más algoritmos que se expondrán más adelante) . La comunicación entre los diferentes elementos podrá realizarse de forma cableada o inalámbrica (mediante comunicación WiFi, Bluetooth, ZigBee, telefonía móvil GSM, 3G, 4G, 5G...o cualquier otro tipo de comunicación inalámbrica) a través de cualquier tipo de red de telecomunicación. Los sensores deben poder comunicarse con uno o más dispositivos electrónicos (llamados de recogida de datos) a los que envían las señales que capturan (usando cualquier tipo de ecnología de comunicación alámbrica o inalámbrica, como se ha explicado anteriormente) ; estos dispositivos electrónicos que recogen los datos de los sensores, se comunicarán con el procesador o procesadores de los dispositivos electrónicos de explotación que procesan dichos datos para enviarles dichos datos para su procesado o, en una realización alternativa, el mismo dispositivo electrónico que recoge los datos (es decir, el que recibe la información de los sensores) es el que se encarga de procesarlos. Hay que destacar que los datos se obtienen de los sensores, preferiblemente, en tiempo real. En una realización, uno o más de los sensores también se pueden comunicar entre sí mediante cualquier tipo de comunicación por cable o inalámbrica. Los dispositivos de explotación de los datos (aunque por concisión, se habla solo en plural, puede haber uno o más de un dispositivo de explotación de datos) pueden ubicarse dentro o fuera del almacén o incluso en la nube. Estos dispositivos dispondrán de (o tendrán comunicación con) una o varias bases de datos que contendrán la información recogida por los distintos sensores. En una realización, se propone mejorar la eficiencia de un almacén, mejorando los tiempos y eficiencia de las ubicaciones de carga y descarga, por ejemplo, consiguiendo una mejora de la tasa de ocupación de dichas ubicaciones (por ejemplo, muelles o portones) y una reducción de los tiempos de carga y descarga; mediante la obtención de parámetros que definen el comportamiento de dichos procesos. Para ello se realizan las siguientes tareas, en uno o más procesadores electrónicos del dispositivo de explotación de los datos (éste es un ejemplo no limitativo y no todas las tareas son obligatorias) : - Recibir los datos capturados por el sensor (P) de posición del camión (o cualquier otro vehículo de transporte de mercancías) en la ubicación de carga/descarga y el sensor (T) de detección tráfico de personas y/o carretillas. Aunque se está suponiendo que hay un sensor P y un sensor T por ubicación de carga/descarga (por muelle o portón) , en general puede haber más de un sensor P y más de un sensor T por muelle o portón. O incluso haber muelles o portones del almacén donde no existan estos sensores. - Para cada ubicación de carga/descarga (por ejemplo, muelle o portón) , gracias a la información recibida del sensor P, se computará el tiempo en el que no se detecta ningún camión (o más generalmente hablando ningún vehículo de transporte de mercancías) en dicha bicación (estado "sin camión", es decir, sin ocupar) y el tiempo en el que se detecta algún camión en dicha ubicación (estado "con camión", es decir ocupada) . - Dentro del estado "con camión" se distinguirá el tiempo en el que el sensor T detecta tráfico (en el que se considerará que se está cargando/descargando el camión, es decir se está trabajando en la carga/descarga) y el tiempo en el que el sensor T no detecta tráfico (en el que se considerará que el muelle o portón está ocupado pero no se está cargando/descargando, es decir, no se está trabajando en la carga/descarga) . El procesado de los datos del sensor T para detectar los estados de trabajo y no trabajo, se explicará más adelante. - Los parámetros de tiempo de ocupación de cada ubicación, tiempo de trabajo y tiempo de ocupación sin trabajar son importantes para mejorar la eficiencia de cada muelle o portón (cada ubicación de entrada/salida) . Como los datos de los sensores se obtienen en tiempo real, el valor de estos parámetros se obtiene en tiempo real, lo que permite una reactividad inmediata en la mejora continua de ineficiencias. Estos valores también se pueden almacenar en bases de datos para su análisis histórico. - Se puede usar también un parámetro de Eficiencia del proceso de carga (o Eficiencia global del equipo, OEE, del inglés Overall Equipment Effectiveness) que, en una realización se calcularía del siguiente modo: OEEcarga = ( (N° de objetos cargados) x (Ti_carga de cada objeto) ) / (Ttot_carga) u OEEcarga = ( (N° de bultos cargados) x (Ti_carga de cada bulto) ) / (Ttot_carga) , si los parámetros se determinan para cada bulto; siendo "Ttot_carga" el Tiempo Total empleado en la carga del camión hasta el momento y Ti_carga el tiempo ideal de carga de cada objeto/bulto. En el caso de la Eficiencia del proceso de descarga, se calcularía en una realización de la siguiente forma: OEEdescarga = ( (N° de objetos descargados) x (Ti_descarga de cada objeto) ) / (Ttot_descarga) u OEEdescarga = ( (N° de bultos descargados) x (Ti_descarga de cada bulto) ) / (Ttot_descarga) , si los parámetros se determinan para cada bulto; siendo "Ttot_descarga" el Tiempo Total empleado en la descarga del camión hasta el momento y Ti_descarga el tiempo ideal de descarga de cada objeto/bulto. Este parámetro OEE permitirá predecir cuándo se va a terminar de cargar el camión, dado que mide y compara en tiempo real cómo se está ejecutando realmente el proceso de carga o descarga respecto al tiempo ideal. En una realización este tiempo ideal, se obtiene midiendo el proceso de carga o descarga en condiciones ideales; en una realización alternativa este tiempo ideal, se obtiene a partir de un histórico de los tiempos de carga o descarga en condiciones reales (por ejemplo, la media de los tiempos de carga o descarga registrados durante un determinado tiempo o la media de los tiempos de carga o descarga registrados durante un determinado tiempo quitando los casos donde ha habido algún problema) . - Se puede usar también un parámetro de Disponibilidad del proceso de carga (DISP_carga) que, en una realización se calcularía del siguiente modo: DISP = (Tcargando) / ( (Tcargando + Tparado) ) donde "Tcargando" es el tiempo total en que hay camión en el muelle y éste se está cargando (la suma del tiempo en el estado "trabajando", Ttrabajando, durante un periodo determinado) y "Tparado" es el tiempo en que hay camión, pero éste no se está cargando (la suma del tiempo en el estado "Sin Trabajar", Tinactivo, durante un periodo determinado) . En el caso del proceso de descarga, se puede usar también Disponibilidad del proceso de descarga (DISP_descarga) que, en una realización se calcularía del siguiente modo DISP = (Tdescargando) / ( (Tdescargando + Tparado) ) donde "Tdescargando" es el tiempo total en que hay camión en el muelle y éste se está descargando (la suma del tiempo en el estado "trabajando", Ttrabajando) y "Tparado" es el tiempo en que hay camión, pero éste no se está descargando (la suma del tiempo en el estado "Sin Trabajar", Tinactivo) . - Mediante la obtención de estos parámetros de tiempo de ocupación de cada ubicación, tiempo de trabajo y tiempo de ocupación sin trabajar (y opcionalmente otros derivados de éstos, como Eficiencia del proceso o Disponibilidad) se puede mejorar la eficiencia de cada muelle o portón (cada ubicación de entrada/salida) y del almacén en general. Así, por ejemplo, si estos parámetros tienen valores considerados bajos (comparados con un umbral o con el funcionamiento histórico del almacén o de otros almacenes similares) , se pueden variar diversos factores de diseño y/o funcionamiento del almacén (como número de estanterías, número de carretillas u operarios, distancia entre los muelles y la estantería, tipo de carretillas, ubicación de los objetos en la estantería...) que hagan que mejoren estos parámetros. Por ejemplo, ante un cambio en uno de los factores, se pueden medir estos parámetros para ver ómo ha variado su valor y decidir si ese cambio ha mejorado la eficiencia (y por lo tanto ha de mantenerse) o ha empeorado la eficiencia y, por lo tanto, ha de revocarse. - El dispositivo de explotación de datos, puede presentar está información al usuario (mediante un interfaz de usuario) en cualquier formato. Por ejemplo, en una gráfica puede indicarle los periodos del día en que cada ubicación de carga/descarga está sin ocupar ("sin camión") , ocupada sin trabajar ("con camión sin trabajar") u ocupada trabajando ("trabajando") ; o la cantidad de tiempo en que se está en cada uno de estos estados. Así se podría mostrar en una gráfica el log o sucesión de estados (sin camión, trabajando o sin trabajar) y tiempos de cada estado en el eje temporal o el Pareto de estados, con tiempos y número de repeticiones de cada estado (se mostrará un Pareto con 3 barras verticales, representando los 3 estados distintos) . Esto es solo un ejemplo, y cualquier otro tipo de gráficas se pueden usar. Esta misma información se puede dar en forma de tabla o texto, en vez de o adicionalmente a, gráficamente. - En la siguiente tabla (Tabla 1) , se muestra a modo de ejemplo, una posible presentación al usuario (por ejemplo, mediante una interfaz de usuario) de los datos y parámetros de los que se han hablado anteriormente. Así, en el ejemplo de esta tabla se muestran los estados y tiempos agregados, en este caso por turno y un indicador de eficiencia de carga/descarga (en este caso, las disponibilidad %Disp) del muelle, como relación entre los tiempos trabajando y el tiempo total (tiempo total que ha estado el camión en el muelle = Ttrabajando+TInactivo o de parada) . Tabla 1 A continuación, se explicará cómo se procesan los datos provenientes del sensor (o sensores) T de tráfico de personas o carretillas en la ubicación de carga/descarga (muelle, portón ...) en una realización a modo de ejemplo no limitativo. Aunque por concisión y simplicidad, se explicará el procesado principalmente en referencia a la carga del camión, la misma es aplicable al proceso de descarga. Lo único hay que tener en cuenta que los valores de ejemplo de los parámetros mencionados a continuación para los procesos de carga y descarga pueden y suelen ser diferentes. - Lógicamente, la frecuencia con la que las carretillas/personas circulan hacia el interior/exterior del camión depende del tipo y tamaño de objetos/bultos que transporte el camión, de la longitud del camión, del tipo de carretilla utilizado, de la persona/personas que realizan dicha carga o descarga, de la distancia entre el camión y las estructuras de almacenamiento (estanterías) , etc.. A modo de ejemplo, puede haber cargas que generen una señal del sensor "T" detectando la presencia de una persona o carretilla en el muelle cada 30 segundos, otros cada 3 minutos, otros cada 8 minutos, etc. - Se calcula un Tiempo Ideal de carga, Ti, para cada bulto que se carga en el almacén en sus diferentes condiciones. Por bulto, se entiende un conjunto de objetos agrupados y que, por lo tanto, se cargan o descargan de una vez (normalmente porque es el número de objetos que vienen empaquetados juntos) . Para calcular dicho tiempo ideal, se puede reproducir la situación de carga del camión en condiciones ideales (sin obstáculos o problemas que perjudiquen al proceso de carga) . En estas circunstancias, el sensor T mide los tiempos reales de cada carga individual y los envía (directamente o a través de un equipo de recogida de datos) al dispositivo de explotación o a la base de datos. Como se ha explicado, en base a estos datos medidos en cada carga individual (en condiciones ideales) , el algoritmo desarrollado calcula, por ejemplo, el tiempo mínimo de carga (Tmin) , el tiempo máximo de carga (Tmax) y el Tiempo medio de carga (Tmed) de cada bulto. En una realización, el tiempo medio de carga en condiciones ideales es lo que se tomará como Tiempo Ideal de carga, Ti. También se pueden calcular otros valores estadísticos como por ejemplo la Desviación media o la Varianza o cualquier otro. Tmin, Tmax, Tmed y Ti serán asociados al sensor "T" de cada ubicación de carga/descarga (y, preferiblemente, de cada tipo de objeto) , relacionados con la frecuencia de circulación (de una persona o de una carretilla en la tarea de carga) , con el tipo de bultos transportados por el camión, etc. Esta parametrización proporciona enorme flexibilidad y fiabilidad de la información. En una realización, estos parámetros (Tmin, Tmax, Tmed, Ti...) se pueden actualizar con el histórico de valores reales del tiempo de carga medidos durante un cierto periodo de tiempo anterior. - En una realización, para determinar cuándo se está cargando un camión, se utilizará el tiempo "Tmax", al que se añadirá un Tiempo de Tolerancia "Ttol" (este parámetro "Ttol" es configurable) . Por ejemplo, si se considera un bulto tiene un tiempo de carga "Tmax" de 100 segundos; se creará un parámetro Tiempo de Referencia (también llamado umbral de tiempo) de carga "Tref", que será la suma de "Tmax" más "Ttol": "Tref" = ("Tmax" + "Ttol") . Si se define por ejemplo un "Ttol" del 20% (20 segundos en este caso) , obtendremos un "Tref" de 120 segundos (estos valores, son solo ejemplos ilustrativos; y se pueden usar cualesquiera otros valores) . De este modo, al "Tmax" obtenido midiéndolo en condiciones ideales, se aplica una tolerancia "Ttol" configurable (por ejemplo, a través de una aplicación software en el dispositivo de explotación) y se obtiene el "Tref" como suma de ambos (esto es solo un ejemplo, y este tiempo de referencia o umbral se puede determinar de muchas otras formas) . - En una realización, durante la carga de un camión, tras una señal de cruce (de una persona o de una carretilla) del sensor T, se esperará a ver si se produce otra señal del sensor "T". Si se produce otra señal de cruce antes de que pase el tiempo de referencia Tref (en este caso de ejemplo 120 segundos) , se resetea el contador a 0 y se espera a la siguiente señal de cruce antes de ese Tref. Durante todo este tiempo se considera que se está cargando (modo trabajando, es decir, se está incrementando el contador Ttrabajando) . Es decir, mientras que el tiempo transcurrido entre dos señales de cruce consecutivas sea menor que Tref, se considera que se está cargando el camión y por lo tanto se está trabajando y todo el tiempo ranscurrido se irá computando como de modo "trabajando". Se está suponiendo que el sensor P ha detectado la señal de que el muelle está ocupado (si el muelle no está ocupado, no puede haber carga o descarga, por lo que típicamente no se analizan las señales provenientes del sensor T en ese periodo) . En el momento en que no se produce otra señal de cruce antes de "T ref", a partir ese momento se registrará un modo que indica que la carga del camión está Parado (modo "Sin trabajar" o "Inactivo") , y se mantendrá este modo hasta que se produzca una nueva señal de este sensor "T" (es decir, se está incrementando el contador Tinactivo) o hasta que el sensor P informe de que el camión ya no ocupa la ubicación de carga/descarga (es decir, el camión se ha ido y se ha terminado el proceso de carga/descarga) . Estas Paradas (periodos en los que no se obtiene una señal de cruce procedente del sensor T) pero hay un camión en el muelle, pueden tener una duración variable y su causa puede ser registrada, en algunos casos automáticamente (por ejemplo mediante sensores que detectan la causa de la parada) o en otros casos gracias a la declaración de un operario, por ejemplo a través de un dispositivo electrónico (llamado Interface de Operario, dispositivo "I" en la figura 1) con una interface de usuario que permite al operario introducir que ha habido una parada y su causa. Aunque en la figura 1 sólo se muestra un Interface de Operario, esto es solo un ejemplo y puede haber más de uno (o ninguno, si no se estima necesario) . Causas típicas de este tipo de paradas son, por ejemplo: Falta de los objetos de carga (están sin preparar, siniestro, verificaciones, retraso ruta previa) ; averías (avería de máquina, avería del muelle, cambio de batería, avería de sistema informático, siniestro en la carga/descarga, avería scanner...) ; paradas relacionadas con recursos (falta de carretilla, problemas de posicionamiento de camión en muelle, retraso de camión, camión en pausa, falta de operario, falta de scanner.) . Mientras se esté produciendo la carga del camión (modo "Trabajando") se puede medir exactamente el tiempo de carga exacto de cada bulto (por ejemplo 149" o 154" o cualquier otro) , que permitirá además hacer cálculos estadísticos por bulto, como medias, desviaciones, etc., y compararlas con los tiempos predefinidos. El tiempo entre señales del sensor T se corresponde con el tiempo de carga del bulto. A modo de ejemplo no limitativo, el tiempo de carga de del bulto puede medirse, al menos, de las siguientes maneras: • Si sólo utilizamos una fotocélula como sensor T, la primera señal se produce cuando entra a cargar el primer bulto, la segunda señal cuando sale a buscar el segundo bulto y la tercera señal cuando vuelve a cargar el segundo bulto, y así sucesivamente; el tiempo entre la primera y la tercera señal es el tiempo total de carga del segundo bulto, desglosado en 2 partes: tiempo de ir a buscarlo al almacén y tiempo de depositarlo en el camión) • Si, por ejemplo, el sensor T lo forman 2 fotocélulas, una detrás de la otra, podemos saber el sentido del tráfico, si se está entrando o saliendo del camión/muelle; el tiempo de carga de un bulto se corresponde con dos entradas consecutivas. El uso de 2 fotocélulas consecutivas como en el ejemplo anterior, además de servir para medir el tiempo de carga, proporciona también información sobre el sentido del tráfico e incluso la velocidad a la que se desplaza la carretilla/operario, con objeto de medirla y optimizarla. - En la explicación anterior se ha considerado que para determinar "Tmin", "Tmax" y "Tmed", entre otros parámetros, se mide realmente, en condiciones ideales el proceso de carga del camión. Aunque esto es lo ideal, no tiene por qué ser necesario; así en una realización, estos parámetros se pueden ir midiendo y calculando en condiciones reales desde la primera carga. Así, por ejemplo, el "Tmin" puede considerarse el tiempo mínimo de carga registrado a lo largo del tiempo anterior; el "Tref" podrá ser inicialmente varias veces el "Tmin" (típicamente 3 veces) , lo que permitirá medir y calcular inicialmente el "Tmed", automáticamente descontando las paradas largas; una vez se tenga el "Tmin" y el "Tmed", podremos calcular el "Tmax", que equidistará del "Tmed" lo mismo que "Tmin". Una vez se disponga de este "Tmax" real, se podrá calcular un "Tref" más ajustado a la realidad que el considerado inicialmente, aplicando el parámetro configurable "Ttol" (típicamente el 20% aunque puede tomar cualquier otro valor) . Esto es solo un ejemplo, y se pueden usar otros algoritmos para el cálculo de "Tmin", "Tmax" y "Tmed" a partir de las medidas en tiempo real. Además, en una realización, se propone mejorar la eficiencia del almacén, en concreto mejorando los tiempos de posicionamiento del camión en el muelle o portón mediante la obtención de parámetros que afectan a dicho proceso. Para ello se realizan las siguientes areas, en uno o más procesadores electrónicos (éste es un ejemplo no limitativo y no todas las tareas son obligatorias) : - Detección del momento de llegada del vehículo de carga/descarga (camión) al almacén o a las instalaciones donde se encuentra el almacén. Esto se puede hacer de numerosas maneras: Por ejemplo, mediante la información recibida del sensor L que nos indica la localización del camión, mediante la información recibida del sensor R que nos indica que un determinado camión (cuya matrícula ha leído) ha llegado a las instalaciones o mediante un empleado (por ejemplo, una persona de la oficina o guarda de seguridad o cualquier operario) que ve el camión y lo indica al dispositivo de explotación de datos (por ejemplo, mediante una aplicación informática realizada para ello en cualquier dispositivo electrónico o mediante el dispositivo de interfaz operario) . - Detección del momento en el que el camión llega a la ubicación de carga/descarga mediante la lectura del sensor P situado en dicha ubicación. - Obtener la diferencia entre los dos tiempos anteriores indicará el tiempo que ha tardado el camión en posicionarse en el muelle. Si el valor de este parámetro es muy alto, se pueden cambiar factores de diseño del almacén para mejorarlo. - Gracias a los sensores que se utilizan, se conoce en todo momento la ocupación de las ubicaciones de carga/descarga, por lo que cuando se detecta que el camión llega a las instalaciones se le puede indicar automáticamente (por ejemplo, mediante un mensaje a un dispositivo de usuario del conductor del camión) a qué muelle/portón debe dirigirse, lo que agiliza el posicionamiento del camión al muelle y reduce el tiempo de no ocupación de los muelles. Adicionalmente, mediante la tecnología GPS o similar, el sistema también conoce la posición del camión fuera de las instalaciones, por ejemplo, cuando se encuentra a una determinada distancia de las mismas, por lo que puede gestionar con antelación a qué muelle va a dirigir al camión e incluso acelerar o detener la carga/descarga en algún muelle para desocuparlo, o mandar desocupar uno de los muelles si la carga/descarga ha terminado y aún sigue ocupado. Esto son solo ejemplos (no limitativos) de acciones que se pueden tomar a partir de la determinación de estos parámetros y que permiten una mejor utilización de los recursos y, por lo tanto, una mejora en la gestión del almacén. En una realización, se propone además mejorar la eficiencia del almacén, en concreto mejorando la utilización y eficiencia de los vehículos de transporte interno (carretillas) , por ejemplo, consiguiendo una reducción de los tiempos de transporte, del espacio que tienen que recorrer, optimizando los volúmenes y pesos transportados...; mediante la obtención de parámetros que afectan a dicho proceso (transporte en carretillas) . Para ello se realizan las siguientes tareas, en uno o más procesadores electrónicos (éste es un ejemplo no limitativo y no todas las tareas son obligatorias) : - Detección del estado de movimiento o parada de cada carretilla. Preferiblemente esto se realiza a partir de la información recibida del sensor de movimiento (M1) de la carretilla, mediante el cual se conocerá si la carretilla está en movimiento o parada. La causa del paro de la carretilla se podrá detectar en algunos casos automáticamente (por ejemplo mediante sensores que detectan la causa de la parada) o en otros casos gracias a la declaración de un operario, por ejemplo a través de un dispositivo electrónico (Interface de Operario "I") que permite a un operario del almacén introducir que ha habido una parada y su causa. - Detección de si cada carretilla lleva carga o no, las características de lo que transporta (volumen y/o peso) así como cuando carga o descarga los bultos que transporta (es decir, cuando una carretilla pasa de estar sin carga a estar con carga o viceversa) . Preferiblemente esto se realiza a partir de la información recibida del sensor de volumen (V) de la carretilla - Determinación de la localización de una o más carretillas, preferiblemente mediante la información recibida de su sensor de localización (U1) que permiten conocer la localización de una carretilla. - Determinación de la distancia (por ejemplo, los metros) recorrida por cada carretilla en cada modo (transportando bultos o en vacío) . Esta determinación se puede hacer a partir de la información recibida de sensores específicos (E1) que miden el espacio recorrido por cada carretilla o, alternativamente, a partir de la información de localización de cada carretilla en cada momento recogida por cada sensor de localización U1. - Todos los parámetros determinados (estado de movimiento y carga de cada carretilla, localización de la misma, espacio recorrido.) se pueden relacionar automáticamente con el tipo de objeto o bulto que se trata, o más en concreto con los datos que describen los objetos o bultos tratados, llamado datos del componente (C en la figura 1) . Estos datos se obtienen eneralmente de la base de datos de información del almacén. En una realización, esta información sobre los objetos o bultos almacenados se obtienen del llamado Sistema de Planificación de Recursos Empresariales (ERP de sus siglas en inglés) del almacén. - La determinación de estos parámetros permite conocer en todo momento las características del proceso de transporte de cada carretilla, como por ejemplo, el estado de movimiento y carga de cada carretilla, localización de la misma o el espacio recorrido por cada una de ellas en un periodo de tiempo. Esto permite mejorar la eficiencia de la utilización de cada carretilla y del almacén en general. Así por ejemplo, si se detecta que una carretilla está mucho tiempo sin carga, se puede destinar durante ese tiempo a la descarga de otro camión; o si se detecta que una carretilla recorre mucho espacio se puede asignar a una tarea de transporte en otro muelle o a otra estantería, que haga que la distancia recorrida sea menor...Esto son solo ejemplos (no limitativos) , de acciones que se pueden tomar a partir de la determinación de estos parámetros y que permiten una mejor utilización de los recursos y, por lo tanto, una mejora en la gestión del almacén. En una realización, se propone además mejorar la eficiencia del almacén, en concreto mejorando la utilización y eficiencia de los terminales manuales de recogida/colocación de bultos u objetos (llamados terminales de "picking") , por ejemplo, consiguiendo una reducción de los tiempos empleados durante la recogida/colocación y de los espacios recorridos por los terminales de transporte.; mediante la obtención de parámetros que afectan al proceso de funcionamiento de dichos terminales. Para ello se realizan las siguientes tareas, en uno o más procesadores electrónicos (éste es un ejemplo no limitativo y no todas las tareas son obligatorias) : - Detección del estado de movimiento o parada de cada terminal. Preferiblemente esto se realiza a partir de la información recibida del sensor de movimiento (M2) del terminal, mediante el cual se conocerá si está en movimiento o parado. La causa del paro del terminal se podrá detectar en algunos casos automáticamente (por ejemplo mediante sensores que detectan la causa de la parada) o en otros casos gracias a la declaración de un operario, por ejemplo, a través de un dispositivo electrónico (Interface de Operario que permite a un operario del almacén introducir que ha habido una parada y su causa. - Determinación de la localización de una o más terminales, preferiblemente mediante la información recibida de su sensor de localización (U2) que permiten conocer la localización de un terminal. - Determinación de la distancia (por ejemplo, los metros) recorrida por cada terminal para la recogida/colocación de cada bulto concreto. Esta determinación se puede hacer a partir de la información recibida de sensores específicos (E2) que miden el espacio recorrido por cada terminal o, alternativamente, a partir de la información de localización de cada terminal en cada momento recogida por cada sensor de localización U2. - Todos los parámetros determinados (estado de movimiento de cada terminal, localización del mismo, espacio recorrido...) se pueden relacionar automáticamente con el tipo de objeto o bulto que recoge o coloca el terminal, o más en concreto con los datos que describen los objetos o bultos seleccionados por el terminal, llamado datos del componente (C en la figura 1) . Así, por ejemplo, se podría obtener la frecuencia con la que se recoge o coloca (y, por lo tanto, la de carga o descarga) cada objeto o bulto. Estos datos de componente se obtienen generalmente de la base de datos de información del almacén. En una realización, esta información sobre los objetos o bultos almacenados se obtienen del llamado Sistema de Planificación de Recursos Empresariales (ERP de sus siglas en inglés) del almacén. La captura de datos del componente (C en la figura 1) juega un papel importante en aquellos supuestos en los que el terminal o carretilla no disponga de sensores de movimiento M, ni de posición U, ni de espacio recorrido E, pero sí estén conectados al ERP, ya que esto permitirá conocer en tiempo real cada vez que el terminal o la carretilla recoge o coloca el bulto; por tanto, siguiendo la misma descripción que para el caso de la carga/descarga de camiones, nos permitirá saber si están trabajando Ttrabajando o inactivos Tinactivo, y medir su Tmin, Tmax, Tmed, Tref, Disp, OEE, etc. Cuando se producen 2 capturas de datos de (C) dentro de un umbral de tiempo, se considera que el terminal está trabajando, Ttrabajando; si no, se considera que está parado, Tinactivo. - La determinación de estos parámetros permite conocer en todo momento las características del proceso de transporte de cada terminal, como por ejemplo, el estado de movimiento de cada terminal, localización del mismo, espacio recorrido por cada terminal en un periodo de tiempo, frecuencia de carga o descarga de cada b u lto .. Esto permite mejorar la eficiencia de la utilización de cada terminal y del almacén en general. Así por ejemplo, si se detecta que un terminal está mucho tiempo sin moverse, se puede destinar durante ese tiempo a otra stantería (si son movibles) ; o si se detecta que un terminal recorre mucho espacio, se pueden recolocar los objetos en las estanterías de manera que la distancia recorrida por cada terminal sea menor...Esto son solo ejemplos (no limitativos) , de acciones que se pueden tomar a partir de la determinación de estos parámetros y que permiten una mejor utilización de los recursos y, por lo tanto, una mejora en la gestión del almacén. En este texto, el término "comprende" y sus derivaciones (como "comprendiendo", etc.) no deben entenderse en un sentido excluyente, es decir, estos términos no deben interpretarse como excluyentes de la posibilidad de que lo que se describe y define pueda incluir más elementos, etapas, etc. La presente invención se puede aplicar en cualquier tipo de instalaciones donde se realice almacenaje de objetos de cualquier tipo. Algunas realizaciones preferidas de la invención se describen en las reivindicaciones dependientes que se incluyen seguidamente. Descrita suficientemente la naturaleza de la invención, así como la manera de realizarse en la práctica, hay que hacer constar la posibilidad de que sus diferentes partes podrán fabricarse en variedad de materiales, tamaños y formas, pudiendo igualmente introducirse en su constitución o procedimiento, aquellas variaciones que la práctica aconseje, siempre y cuando las mismas, no alteren el principio fundamental de la presente invención. Esta descripción detallada se aporta para ayudar a un entendimiento completo de la invención. Por lo tanto, los expertos en la materia reconocerán que variaciones, cambios o modificaciones de las realizaciones descritas aquí pueden llevarse a cabo sin salir del ámbito de protección de la invención. También, la descripción de funciones y elementos sobradamente conocidos se omiten por claridad y concisión. La descripción y los dibujos simplemente ilustran los principios de la invención. Por lo tanto, debe apreciarse que los expertos en la técnica podrán concebir varias disposiciones que, aunque no se hayan descrito o mostrado explícitamente en este documento, representan los principios de la invención y están incluidas dentro de su alcance. Además, todos los ejemplos descritos en este documento se proporcionan principalmente por motivos pedagógicos para ayudar al lector a entender los principios de la invención y los conceptos aportados por el (los) inventor (es) para mejorar la técnica, y deben considerarse como no limitativos con respecto a tales ejemplos y condiciones descritos de manera specífica. Además, todo lo expuesto en este documento relacionado con los principios, aspectos y realizaciones de la invención, así como los ejemplos específicos de los mismos, abarcan equivalencias de los mismos. Aunque la presente invención se ha descrito con referencia a realizaciones específicas, los expertos en la técnica deben entender que los anteriores y diversos otros cambios, omisiones y adiciones en la forma y el detalle de las mismas pueden realizarse sin apartarse del alcance de la invención tal como se definen mediante las reivindicaciones siguientes.
+ ES-2912599_B2 DESCRIPCI N SISTEMA Y MÉTODO PARA LA GESTIÓN DE ALMACENES CAMPO TÉCNICO DE LA INVENCIÓN La presente invención se refiere al campo de la gestión y organización de almacenes donde se reciben, se guardan y se distribuyen productos o material de cualquier tipo, es decir, pertenecientes a cualquier sector (automoción, textil, químico, farmacéutico, de construcción o cualquier otro) . Más concretamente, la presente invención propone un sistema y un método que permite una mejora sustancial en la eficiencia del funcionamiento de dichos almacenes, mediante una gestión de los mismos basada en un tratamiento y procesado optimizado de información recogida por distintos sensores de monitorización de la actividad en dichos almacenes. ANTECEDENTES DE LA INVENCIÓN La gestión de almacenes donde se guardan gran cantidad de productos es una tarea compleja, ya que en un almacén se realizan numerosas actividades (carga, descarga, almacenamiento de productos, extracción de productos, identificación de los mismos, transporte de los productos dentro del almacén...) , muchas veces de manera simultánea. Es importante el control de todas estas actividades para que se realicen correctamente y en el menor tiempo posible, de manera que el almacén funcione de la manera más rápida, eficiente y correcta posible. En la actualidad, los almacenes se gestionan de manera rudimentaria, en la mayor parte de los casos de manera manual y cuando se hace de manera digitalizada y automatizada, no se realiza de forma eficiente. Hay que tener en cuenta, que en general, en estos almacenes los productos cambian constantemente, así como las cantidades y ubicaciones de los mismos, por lo que en la mayoría de los casos no existen patrones de comportamiento. Así algunos de los problemas que se pueden encontrar actualmente en los almacenes son, entre otros: - Los camiones (o cualquier otro vehículo que se use para transporte de productos) ocupan demasiado tiempo el muelle de carga/descarga del almacén, debido por ejemplo al tiempo que se tarda en cargar o descargar los productos o al tiempo que tarda el camión en posicionarse en el muelle. Esto causa una utilización no eficiente de los muelles (o portones o similares) de carga/descarga del almacén; haciendo que el número de camiones que se carga/descarga en un determinado muelle durante el día sea bajo. - Las carretillas (o cualquier otro vehículo de transporte interno en el almacén) , tardan demasiado en el transporte de los productos debido por ejemplo a que no está optimizado la distancia que deben recorrer o porque no pueden transportar suficiente cantidad de productos. - Algo similar pasa con los terminales de colocación y recogida de objetos en las estanterías (denominados por el término inglés "picking") que tardan demasiado en la recogida o colocación de cada producto. Por todos estos problemas (y otros que no se han citado aquí) en la actualidad la gestión de almacenes se realiza de manera poco eficiente. Por esta razón, existe la necesidad de un procedimiento y sistema de gestión de almacenes que solucione todos estos problemas y que, en general, permita una gestión de almacenes eficiente, rápida y que implique ahorro de recursos. SUMARIO DE LA INVENCIÓN El objetivo de la presente invención es el de desarrollar un sistema y método de gestión (y monitorización) de almacenes mediante uno o varios sensores de monitorización y uno o varios algoritmos de procesado, que permiten obtener parámetros para la mejora de la eficiencia de algunos de los recursos más relevantes de un almacén y, en general, que mejoran la eficiencia en la gestión del almacén resolviendo, entre otros los problemas anteriormente expuestos. La presente invención puede aplicarse a cualquier tipo de almacén que almacena cualquier tipo de objetos, tanto de propósito logístico (almacenes logísticos, receptores y distribuidores de productos, pertenecientes estos a cualquier sector: utomoción, textil, químico, farmacéutico, etc.) como de propósito industrial (almacenes internos de una determinada fábrica, o externos a la misma, que realizan la recepción y distribución de productos o componentes a cualquier proceso industrial) . Con el método y sistema propuesto, se pueden conseguir las siguientes ventajas técnicas, entre otras: • En los muelles de carga de los almacenes (o portones o similar) : reducción de los tiempos de utilización. Los camiones serán cargados o descargados en menos tiempo, por lo que los muelles podrán ser utilizados por más camiones en el mismo tiempo. • En los camiones (u otros vehículos similares) reducción de los tiempos de carga y descarga de los productos, así como de las ineficiencias asociadas a dichos procesos. • Reducción de los tiempos de posicionamiento de los camiones en los muelles; esto es, del tiempo que tarda el camión en llegar y posicionarse en el muelle asignado. • En las carretillas (o vehículos similares) , reducción de los tiempos de transporte y de los espacios recorridos, aumento de los volúmenes y pesos transportados, así como reducción de otras ineficiencias asociadas a dichos procesos. • En los terminales manuales de recogida/colocación de objetos ("picking" o similar) si los hubiera, reducción del tiempo empleado durante la recogida/colocación y de los espacios recorridos por los terminales, así como de otras ineficiencias asociadas a dichos procesos. En un primer aspecto, la presente invención propone un sistema para la gestión de un almacén, donde el sistema comprende: - Al menos un sensor de presencia (P) de vehículos de transporte de mercancías (por ejemplo, camiones) , configurado para detectar si un vehículo de transporte de mercancías e encuentra (correctamente) ubicado en una ubicación de carga/descarga (por ejemplo, un muelle o portón) ; - Al menos un sensor de tráfico (T) de elementos en movimiento, configurado para detectar el cruce de un elemento en movimiento (por ejemplo, una persona o una carretilla) en la ubicación de carga/descarga; - Al menos un procesador electrónico configurado para, en un proceso de carga o de descarga de bultos (de un tipo o tipos determinados) y en la ubicación de carga/descarga, realizar: - Recibir la información capturada por el al menos un sensor (P) de presencia de transporte de mercancías y por el al menos un sensor (T) de tráfico de elementos en movimiento, a través de una red de telecomunicación; - A partir de la información recibida del al menos un sensor de presencia (P) , calcular el tiempo en el que la ubicación de carga/descarga está ocupada y a partir de la información recibida del al menos un sensor de tráfico (T) , mientras la ubicación de carga/descarga está ocupada, determinar el tiempo en que se está trabajando en la ubicación, Ttrabajando, y el tiempo en el que no se está trabajando en la ubicación, Tinactivo, donde esta determinación comprende: - Mientras la información recibida del sensor de presencia (P) indica la presencia de un vehículo de transporte de mercancías en la ubicación de carga/descarga, si la diferencia de tiempo entre los momentos en que se producen dos detecciones consecutivas de cruce de algún elemento en movimiento del sensor de tráfico (T) , es menor que un umbral de tiempo predeterminado, se continua incrementando el Ttrabajando; si no, pasado el umbral de tiempo predeterminado, se comienza a incrementar el Tinactivo hasta que se reciba la siguiente señal de dicho sensor de tráfico (T) . ; - Cuando la información recibida del sensor de presencia (P) indica que se ha terminado la presencia del vehículo de transporte de mercancías en la bicación de carga/descarga, se comienza a incrementar Tinactivo, hasta que llegue una nueva señal del sensor de presencia (P) ; - Obtener a partir de los tiempos calculados, uno o más parámetros de eficiencia del almacén. El umbral de tiempo predeterminado puede ser un tiempo máximo de carga predeterminado si el proceso es de carga o un tiempo máximo de descarga predeterminado si el proceso es de descarga, más un tiempo de tolerancia predeterminado; el tiempo máximo de carga o de descarga puede depender del tipo de bulto. El umbral de tiempo predeterminado se puede obtener a partir de parámetros de tiempo calculados a partir de la información recibida del al menos un sensor de tráfico (T) en reproducciones de situaciones de carga o descarga de un vehículo de transporte de mercancías para cada tipo de bulto, en condiciones ideales. También se puede obtener a partir de parámetros de tiempo calculados a partir de la información recibida del al menos un sensor de tráfico (T) en situaciones reales de carga o descarga de un vehículo de transporte de mercancías durante un periodo previo de tiempo determinado. El al menos un sensor (P) de presencia puede ser de tipo inductivo o de tipo fotocélula y el sensor (T) de tráfico puede ser de tipo fotocélula. Los parámetros de eficiencia del almacén calculados en cada momento pueden ser uno o más de los siguientes (esto es un ejemplo y otros parámetros de eficiencia pueden usarse) : - Eficiencia del proceso de carga, OEEcarga, calculado como: OEEcarga = ( (N° de bultos cargados) x (Ti_carga de cada bulto) ) / (Ttot_carga) ; siendo Ttot_carga el Tiempo Total empleado en la carga del vehículo de mercancías hasta el momento y Ti_carga el tiempo ideal de carga del tipo de bulto en cuestión medido en condiciones ideales u obtenido a partir de un histórico de datos de carga; - Disponibilidad del proceso de carga, DISPcarga, calculado como: DISPcarga = (Tcargando) / ( (Tcargando + Tparado) ) , donde "Tcargando" es la suma del tiempo en el estado "trabajando", Ttrabajando durante un periodo determinado y "Tparado" es la suma del tiempo en el estado "Sin Trabajar", Tinactivo durante el periodo determinado; - Eficiencia del proceso de descarga, OEEdescarga, calculado como: OEEdescarga = ( (N° de bultos descargados) x (Ti_descarga de cada bulto) ) / (Ttot_descarga) ; siendo Ttot_descarga" el Tiempo Total empleado en la descarga del vehículo de mercancías hasta el momento y Ti_descarga el tiempo ideal de descarga del tipo de bulto en cuestión medido en condiciones ideales u obtenido a partir de un histórico de datos de descarga; - Disponibilidad del proceso de descarga, DISPdescarga, calculado como: DISPdescarga = (Tdescargando) / ( (Tdescargando + Tparado) ) , donde "Tdescargando" es la suma del tiempo en el estado "trabajando", Ttrabajando durante el periodo determinado y "Tparado" es la suma del tiempo en el estado "Sin Trabajar", Tinactivo, durante el periodo determinado; En una realización, el al menos un procesador está además configurado para: - calcular el tiempo transcurrido desde que se detecta que un vehículo de transporte de mercancías entra en las instalaciones donde se encuentra el almacén hasta que un sensor de presencia (P) detecta que dicho vehículo de transporte de mercancías se encuentra ubicado en una ubicación de carga/descarga. La detección de que un vehículo de transporte de mercancías entra en las instalaciones se puede obtener a partir de información de un sensor de localización (L) ubicado en el vehículo de transporte de mercancías, a partir de un sensor lector de matrículas configurado para detectar la matrícula de vehículos de transporte de mercancías que entran en las instalaciones donde se encuentra el almacén o a partir de información introducida por un operario del almacén en un dispositivo electrónico a través de un interfaz de usuario. El sistema además puede comprender: - Al menos un sensor de movimiento (M1) configurado para detectar cuando una carretilla de transporte de bultos del almacén, está parada o en movimiento y al menos un sensor de volumen y/o peso (V) configurado para detectar cuando una arretilla de transporte de bultos lleva carga o no y las características de volumen y/o peso transportado; - Donde el al menos un procesador electrónico está además configurado para recibir la información capturada por el al menos un sensor de movimiento (M1) y/o del al menos un sensor de volumen y/o peso (V) a través de la red de telecomunicación y determinar, a partir de esta información, el tiempo en que una carretilla de transporte de bultos está con carga y el volumen y/o peso que una carretilla transporta en cada momento, el tiempo en que una carretilla de transporte de bultos está parada y el tiempo en que una carretilla de transporte de bultos está en movimiento. El al menos un procesador electrónico puede estar además configurado para determinar el espacio recorrido por una carretilla del almacén, a partir de información recibida a través de la red de telecomunicación de al menos un sensor de localización (U1) configurado para detectar la localización de una carretilla de transporte de bultos o de la información recibida a través de la red de telecomunicación de al menos un sensor de espacio recorrido (E1) configurado para detectar metros recorridos por una carretilla de transporte de bultos. En una realización, el sistema además comprende: - Al menos un sensor de movimiento (M2) configurado para detectar cuando un terminal de recogida/colocación de bultos del almacén está parado o en movimiento; - Donde el al menos un procesador electrónico está además configurado para recibir la información capturada por el al menos un sensor de movimiento (M2) a través de la red de telecomunicación y determinar, a partir de esta información, el tiempo en que un terminal de recogida/colocación de bultos está parado y el tiempo en que un terminal de recogida/colocación de bultos está en movimiento. La causa de la parada de la carretilla de transporte de bultos o del terminal de recogida/colocación de bultos se puede determinar a partir de información de sensores o a partir de información introducida por un operario del almacén en un dispositivo electrónico a través de un interfaz de usuario. El al menos un procesador electrónico puede estar además configurado para determinar el espacio recorrido por un terminal de recogida/colocación de bultos del almacén, a partir de información recibida a través de la red de telecomunicación de al menos un sensor de localización (U2) configurado para detectar la localización de terminal de recogida/colocación de bultos o de la información recibida a través de la red de telecomunicación de al menos un sensor de espacio recorrido (E2) configurado para detectar metros recorridos por terminal de recogida/colocación de bultos. El al menos un procesador electrónico puede estar además configurado para asociar a cada tipo de bulto, los tiempos y/o parámetros calculados por el al menos un procesador electrónico. Al menos un dispositivo electrónico puede presentar a un usuario, uno o más de los tiempos y/o parámetros calculados por el al menos un procesador electrónico, mediante un interfaz de usuario del dispositivo (mediante gráficos, tablas, o cualquier otro tipo de formato) . En un segundo aspecto, la presente invención propone un método para la gestión de un almacén, donde el método comprende para un proceso de carga o de descarga de bultos en una ubicación de carga/descarga del almacén, los siguientes pasos realizados por uno o más procesadores electrónicos: a) Recibir la información capturada por al menos un sensor (P) de presencia de transporte de mercancías a través de una red de telecomunicación, donde el al menos un sensor de presencia (P) de vehículos de transporte de mercancías está configurado para detectar si un vehículo de transporte de mercancías se encuentra ubicado en la ubicación de carga/descarga b) Recibir la información capturada por al menos un sensor (T) de tráfico de elementos en movimiento, a través de la red de telecomunicación, donde el al menos un sensor de tráfico (T) de elementos en movimiento está configurado para detectar el cruce de un elemento en movimiento en la ubicación de carga/descarga; c) A partir de la información recibida del al menos un sensor de presencia (P) , calcular el tiempo en el que la ubicación de carga/descarga está ocupada y a partir de la información recibida del al menos un sensor de tráfico (T) , determinar dentro de ese tiempo, el tiempo en que se está trabajando en la ubicación, Ttrabajando, y el tiempo en el que no se está trabajando en la ubicación, Tinactivo, mediante los siguientes pasos: c1) Mientras la información recibida del sensor de presencia (P) indica la presencia de un vehículo de transporte de mercancías en la ubicación de carga/descarga, si la diferencia de tiempo entre los momentos en que se producen dos detecciones consecutivas de cruce de algún elemento en movimiento del sensor de tráfico (T) , es menor que un umbral de tiempo predeterminado, se continua incrementando el Ttrabajando; si no, pasado el umbral de tiempo predeterminado, se comienza a incrementar el Tinactivo hasta que se reciba la siguiente señal de dicho sensor de tráfico (T) ; c2) Cuando la información recibida del sensor de presencia (P) indica que se ha terminado la presencia del vehículo de transporte de mercancías en la ubicación de carga/descarga, se comienza a incrementar Tinactivo, hasta que llegue una nueva señal del sensor de presencia (P) . d) Obtener a partir de los tiempos calculados, uno o más parámetros de eficiencia del almacén. Finalmente, en un tercer aspecto de la invención se presenta un programa de ordenador que comprende instrucciones ejecutables por ordenador para implementar el método descrito, al ejecutarse en el sistema. Dichas instrucciones pueden estar almacenadas en un medio de almacenamiento de datos digitales. Para un entendimiento más completo de la invención, sus objetos y ventajas, puede tenerse referencia a la siguiente memoria descriptiva y a los dibujos adjuntos. DESCRIPCIÓN DE LOS DIBUJOS Para complementar la descripción que se está realizando y con objeto de ayudar a una mejor comprensión de las características de la invención, de acuerdo con unos ejemplos preferentes de realizaciones prácticas de la misma, se acompaña como parte integrante de esta descripción un juego de dibujos en donde, con carácter ilustrativo y no limitativo, se ha representado lo siguiente: La Figura 1 muestra de manera esquemática un almacén donde se aplica el sistema y método propuesto de acuerdo a una realización de la invención. DESCRIPCIÓN DETALLADA DE LA INVENCIÓN La presente invención propone un sistema y método para la gestión de un almacén, basado en sensores de monitorización y en el procesado de los datos obtenidos de dichos sensores (aplicando determinados algoritmos) . La presente invención es aplicable a cualquier tipo de almacén (o más generalmente hablando, instalación de almacenamiento) que puede almacenar cualquier tipo de objetos: cualquier tipo de material o productos de cualquier tipo como componentes, alimentos, fármacos, telas...o cualquier otro tipo de objeto. La figura 1 muestra esquemáticamente (a modo de ejemplo no limitativo) un almacén (1) genérico donde se puede aplicar el método y sistema de la presente invención. En dicho almacén hay N estanterías (11...1N, con N>=1) , o en general N estructuras de cualquier tipo donde se pueden almacenar objetos. El almacén también dispone de una o más ubicaciones de carga y descarga (muelles, portones.o cualquier tipo de instalación donde se realice la carga y/o descarga de objetos para su salida y/o entrada respectivamente, en el almacén) . En el ejemplo de la figura 1, existen 3 muelles y 2 portones (esto es solo un ejemplo, el número de muelles y portones son parámetros propios de cada almacén) a través de los cuales los vehículos (20) de carga/descarga (generalmente camiones) cargarán o descargarán los objetos, y una o más carretillas (30) de transporte de bultos. Con el término genérico de carretillas, nos referimos a cualquier vehículo que se use para el transporte interno de los bultos dentro del almacén o de las instalaciones (es decir, para desplazar los objetos o bultos por el interior del almacén desde el camión a las estanterías en el caso de a descarga o desde las estanterías al camión en el caso de carga o incluso entre camiones) . El almacén también puede disponer de uno o más terminales (40) para realizar la recogida o la colocación de los objetos (individuales o normalmente agrupados en bultos) en las estanterías (llamados terminales de "picking", usando el término inglés) . Como se ve en la figura 1, se pueden disponer de varios sensores para capturar distintos tipos de datos relacionados con recursos del almacén y, en general, datos del funcionamiento del almacén. En la figura 1 aparecen varios tipos de sensores pero no todos son obligatorios en todos las realizaciones de la invención (es decir, se pueden usar opcionalmente uno o varios tipos de los sensores que aparecen en la figura 1, dependiendo de la realización de la invención) . Los datos de los distintos sensores usados se recogen por uno o más dispositivos electrónicos (llamados genéricamente, dispositivos de recogida de datos) y, generalmente, se almacenan en una o más bases de datos para su procesado en uno o más procesadores electrónicos (mediante uno o más algoritmos que se expondrán más adelante) para mejorar la eficiencia de la gestión del almacén. Estos dispositivos de recogida de datos pueden formar parte de los dispositivos electrónicos de explotación (de los que se hablará más adelante) o pueden no formar parte de ellos sino enviarle a su vez los datos, a través de cualquier red de telecomunicación, a los dispositivos electrónicos de explotación. Algunos de los distintos sensores que se pueden usar son (esto es solo un ejemplo no limitativo, se pueden usar otro tipo de sensores y no es obligatorio el uso de todos los tipos de sensores que se exponen a continuación) : - Uno o más sensores (P) para detectar la posición/presencia de un camión (en general, de cualquier vehículo de transporte de mercancías) en una ubicación de carga/descarga (por ejemplo, un muelle o portón) . Puede ser, por ejemplo, del tipo fotocélula, inductivo, o de cualquier otro tipo. Con este sensor se detecta si un camión está ubicado en la ubicación de carga/descarga (muelle/portón) de manera correcta, es decir, listo para cargar o descargar. La información capturada por dicho sensor se enviará al dispositivo de recogida de datos del almacén, mediante cualquier tipo de red de telecomunicaciones (cableada o inalámbrica) . - Uno o más sensores (T) de tráfico de personas o carretillas (o más genéricamente, de elementos en movimiento) en cada ubicación de carga/descarga, para detectar si se está cargando o descargando el camión (o generalmente hablando el vehículo de transporte de mercancías) . Este sensor puede ser de tipo fotocélula o de cualquier otro tipo. Cada vez que cruce un elemento en movimiento (por ejemplo, una persona o carretilla) hacia el interior/exterior del camión, se detectará dicho cruce, por ejemplo, cortando el haz de luz de la fotocélula. El procesado de los datos recogidos por este sensor (mediante un algoritmo que se explicará más adelante) permite detectar cuándo se está cargando/ descargando el camión, conforme se explica más adelante. La información capturada por dicho sensor se enviará al dispositivo de recogida de datos del almacén, mediante cualquier tipo de red de telecomunicaciones (cableada o inalámbrica) . - Uno o más sensores (L) para detectar la localización de cada camión. Este sensor puede ser por ejemplo del tipo de Sistema de Posicionamiento Global (GPS de sus siglas en inglés) o de cualquier otro tipo. Típicamente irá ubicado en el vehículo de transporte de mercancías (típicamente un camión) ; el vehículo enviará la información de dicho sensor al dispositivo de recogida de datos del almacén, mediante cualquier tipo de red de telecomunicaciones (cableada o inalámbrica) . - Uno o más sensores (R) para leer la matrícula de los vehículos de transporte de mercancías que van a realizar carga/descarga en el almacén. Este sensor puede estar situado en cada uno de los muelles o en las puertas de entrada de en las instalaciones donde se encuentra el almacén, detectando la matrícula de los vehículos (camiones) que entran en dichas instalaciones. La información capturada por dicho sensor se enviará al dispositivo de recogida de datos del almacén, mediante cualquier tipo de red de telecomunicaciones (cableada o inalámbrica) . - Uno o más sensores de movimiento (M1) , preferiblemente colocados en cada una de las carretillas para detectar cuándo una carretilla está parada o en movimiento. También se pueden usar sensores de movimiento (M2) , preferiblemente cada uno de los terminales de recogida/colocación (terminales de "picking") , para monitorizar su movimiento (y detectar cuándo el terminal está parado o en movimiento) . - Uno o más sensores de volumen y/o peso colocado en cada una de las carretillas (V) para detectar cuándo cada carretilla lleva carga o no, las características de volumen y/o peso transportado, así como cuando carga o descarga sus bultos (u objetos) . La información capturada por dicho sensor se enviará al dispositivo de recogida de datos del almacén, mediante cualquier tipo de red de telecomunicaciones (cableada o inalámbrica) . - Uno o más sensores de localización para detectar la localización de cada carretilla (U1) o de cada terminal de recogida/colocación (U2) . Este sensor puede ser por ejemplo del tipo de Sistema de Posicionamiento Global (GPS de sus siglas en inglés) o de cualquier otro tipo. Este sensor típicamente irá ubicado en cada carretilla o terminal, que puede enviar la información de dicho sensor (por ejemplo, en tiempo real) al dispositivo de recogida de datos del almacén (y de ahí al dispositivo de explotación sino es el mismo) , mediante cualquier tipo de red de telecomunicaciones (cableada o inalámbrica) .. - Uno o más sensores de espacio recorrido para calcular metros recorridos por cada carretilla (E1) o terminal de recogida/colocación (E2) . En una realización, este sensor no es necesario como tal, sino que a partir de la información recogida por cada sensor de localización (U1, U2) , se calculan los metros recorridos por cada carretilla o terminal. En una realización el sistema se compone de dos tipos de elementos fundamentales, por un lado, los sensores (uno o más de los expuestos anteriormente) y, por otro los dispositivos electrónicos de explotación de la información monitorizada por los sensores. Dichos dispositivos electrónicos de explotación pueden ser cualquier dispositivo con uno o más procesadores electrónicos de cualquier tipo (por ejemplo, un servidor, un smartphone o de cualquier otro tipo) donde se recogen/reciben esos datos, se almacenan permanente o temporalmente (en bases de datos externas o internas al dispositivo) y se procesan (mediante uno o más algoritmos que se expondrán más adelante) . La comunicación entre los diferentes elementos podrá realizarse de forma cableada o inalámbrica (mediante comunicación WiFi, Bluetooth, ZigBee, telefonía móvil GSM, 3G, 4G, 5G...o cualquier otro tipo de comunicación inalámbrica) a través de cualquier tipo de red de telecomunicación. Los sensores deben poder comunicarse con uno o más dispositivos electrónicos (llamados de recogida de datos) a los que envían las señales que capturan (usando cualquier tipo de tecnología de comunicación alámbrica o inalámbrica, como se ha explicado anteriormente) ; estos dispositivos electrónicos que recogen los datos de los sensores, se comunicarán con el procesador o procesadores de los dispositivos electrónicos de explotación que procesan dichos datos para enviarles dichos datos para su procesado o, en una realización alternativa, el mismo dispositivo electrónico que recoge los datos (es decir, el que recibe la información de los sensores) es el que se encarga de procesarlos. Hay que destacar que los datos se obtienen de los sensores, preferiblemente, en tiempo real. En una realización, uno o más de los sensores también se pueden comunicar entre sí mediante cualquier tipo de comunicación por cable o inalámbrica. Los dispositivos de explotación de los datos (aunque por concisión, se habla solo en plural, puede haber uno o más de un dispositivo de explotación de datos) pueden ubicarse dentro o fuera del almacén o incluso en la nube. Estos dispositivos dispondrán de (o tendrán comunicación con) una o varias bases de datos que contendrán la información recogida por los distintos sensores. En una realización, se propone mejorar la eficiencia de un almacén, mejorando los tiempos y eficiencia de las ubicaciones de carga y descarga, por ejemplo, consiguiendo una mejora de la tasa de ocupación de dichas ubicaciones (por ejemplo, muelles o portones) y una reducción de los tiempos de carga y descarga; mediante la obtención de parámetros que definen el comportamiento de dichos procesos. Para ello se realizan las siguientes tareas, en uno o más procesadores electrónicos del dispositivo de explotación de los datos (éste es un ejemplo no limitativo y no todas las tareas son obligatorias) : - Recibir los datos capturados por el sensor (P) de posición del camión (o cualquier otro vehículo de transporte de mercancías) en la ubicación de carga/descarga y el sensor (T) de detección tráfico de personas y/o carretillas. Aunque se está suponiendo que hay un sensor P y un sensor T por ubicación de carga/descarga (por muelle o portón) , en general puede haber más de un sensor P y más de un sensor T por muelle o portón. O incluso haber muelles o portones del almacén donde no existan estos sensores. - Para cada ubicación de carga/descarga (por ejemplo, muelle o portón) , gracias a la información recibida del sensor P, se computará el tiempo en el que no se detecta ningún camión (o más generalmente hablando ningún vehículo de transporte de mercancías) en dicha ubicación (estado "sin camión", es decir, sin ocupar) y el tiempo en el que se detecta algún camión en dicha ubicación (estado "con camión", es decir ocupada) . - Dentro del estado "con camión" se distinguirá el tiempo en el que el sensor T detecta tráfico (en el que se considerará que se está cargando/descargando el camión, es decir se está trabajando en la carga/descarga) y el tiempo en el que el sensor T no detecta tráfico (en el que se considerará que el muelle o portón está ocupado pero no se está cargando/descargando, es decir, no se está trabajando en la carga/descarga) . El procesado de los datos del sensor T para detectar los estados de trabajo y no trabajo, se explicará más adelante. - Los parámetros de tiempo de ocupación de cada ubicación, tiempo de trabajo y tiempo de ocupación sin trabajar son importantes para mejorar la eficiencia de cada muelle o portón (cada ubicación de entrada/salida) . Como los datos de los sensores se obtienen en tiempo real, el valor de estos parámetros se obtiene en tiempo real, lo que permite una reactividad inmediata en la mejora continua de ineficiencias. Estos valores también se pueden almacenar en bases de datos para su análisis histórico. - Se puede usar también un parámetro de Eficiencia del proceso de carga (o Eficiencia global del equipo, OEE, del inglés Overall Equipment Effectiveness) que, en una realización se calcularía del siguiente modo: OEEcarga = ( (N° de objetos cargados) x (Ti_carga de cada objeto) ) / (Ttot_carga) u OEEcarga = ( (N° de bultos cargados) x (Ti_carga de cada bulto) ) / (Ttot_carga) , si los parámetros se determinan para cada bulto; siendo "Ttot_carga" el Tiempo Total empleado en la carga del camión hasta el momento y Ti_carga el tiempo ideal de carga de cada objeto/bulto. En el caso de la Eficiencia del proceso de descarga, se calcularía en una realización de la siguiente forma: OEEdescarga = ( (N° de objetos descargados) x (Ti_descarga de cada objeto) ) / (Ttot_descarga) u OEEdescarga = ( (N° de bultos descargados) x (Ti_descarga de cada bulto) ) / (Ttot_descarga) , si los parámetros se determinan para cada bulto; siendo "Ttot_descarga" el Tiempo Total empleado en la descarga del camión hasta el momento y Ti_descarga el tiempo ideal de descarga de cada objeto/bulto. Este parámetro OEE permitirá predecir cuándo se va a terminar de cargar el camión, dado que mide y compara en tiempo real cómo se está ejecutando realmente el proceso de carga o descarga respecto al tiempo ideal. En una realización este tiempo ideal, se obtiene midiendo el proceso de carga o descarga en condiciones ideales; en una realización alternativa este tiempo ideal, se obtiene a partir de un histórico de los tiempos de carga o descarga en condiciones reales (por ejemplo, la media de los tiempos de carga o descarga registrados durante un determinado tiempo o la media de los tiempos de carga o descarga registrados durante un determinado tiempo quitando los casos donde ha habido algún problema) . - Se puede usar también un parámetro de Disponibilidad del proceso de carga (DISP_carga) que, en una realización se calcularía del siguiente modo: DISP = (Tcargando) / ( (Tcargando + Tparado) ) donde "Tcargando" es el tiempo total en que hay camión en el muelle y éste se está cargando (la suma del tiempo en el estado "trabajando", Ttrabajando, durante un periodo determinado) y "Tparado" es el tiempo en que hay camión, pero éste no se está cargando (la suma del tiempo en el estado "Sin Trabajar", Tinactivo, durante un periodo determinado) . En el caso del proceso de descarga, se puede usar también Disponibilidad del proceso de descarga (DISP_descarga) que, en una realización se calcularía del siguiente modo DISP = (Tdescargando) / ( (Tdescargando + Tparado) ) donde "Tdescargando" es el tiempo total en que hay camión en el muelle y éste se está descargando (la suma del tiempo en el estado "trabajando", Ttrabajando) y "Tparado" es el tiempo en que hay camión, pero éste no se está descargando (la suma del tiempo en el estado "Sin Trabajar", Tinactivo) . - Mediante la obtención de estos parámetros de tiempo de ocupación de cada ubicación, tiempo de trabajo y tiempo de ocupación sin trabajar (y opcionalmente otros derivados de éstos, como Eficiencia del proceso o Disponibilidad) se puede mejorar la eficiencia de cada muelle o portón (cada ubicación de entrada/salida) y del almacén en general. Así, por ejemplo, si estos parámetros tienen valores considerados bajos (comparados con un umbral o con el funcionamiento histórico del almacén o de otros almacenes similares) , se pueden variar diversos factores de diseño y/o funcionamiento del almacén (como número de estanterías, número de carretillas u operarios, distancia entre los muelles y la estantería, tipo de carretillas, ubicación de los objetos en la estantería...) que hagan que mejoren estos parámetros. Por ejemplo, ante un cambio en uno de los factores, se pueden medir estos parámetros para ver cómo ha variado su valor y decidir si ese cambio ha mejorado la eficiencia (y por lo tanto ha de mantenerse) o ha empeorado la eficiencia y, por lo tanto, ha de revocarse. - El dispositivo de explotación de datos, puede presentar está información al usuario (mediante un interfaz de usuario) en cualquier formato. Por ejemplo, en una gráfica puede indicarle los periodos del día en que cada ubicación de carga/descarga está sin ocupar ("sin camión") , ocupada sin trabajar ("con camión sin trabajar") u ocupada trabajando ("trabajando") ; o la cantidad de tiempo en que se está en cada uno de estos estados. Así se podría mostrar en una gráfica el log o sucesión de estados (sin camión, trabajando o sin trabajar) y tiempos de cada estado en el eje temporal o el Pareto de estados, con tiempos y número de repeticiones de cada estado (se mostrará un Pareto con 3 barras verticales, representando los 3 estados distintos) . Esto es solo un ejemplo, y cualquier otro tipo de gráficas se pueden usar. Esta misma información se puede dar en forma de tabla o texto, en vez de o adicionalmente a, gráficamente. - En la siguiente tabla (Tabla 1) , se muestra a modo de ejemplo, una posible presentación al usuario (por ejemplo, mediante una interfaz de usuario) de los datos y parámetros de los que se han hablado anteriormente. Así, en el ejemplo de esta tabla se muestran los stados y tiempos agregados, en este caso por turno y un indicador de eficiencia de carga/descarga (en este caso, las disponibilidad %Disp) del muelle, como relación entre los tiempos trabajando y el tiempo total (tiempo total que ha estado el camión en el muelle = Ttrabajando+TInactivo o de parada) . Tabla 1 A continuación, se explicará cómo se procesan los datos provenientes del sensor (o sensores) T de tráfico de personas o carretillas en la ubicación de carga/descarga (muelle, portón ...) en una realización a modo de ejemplo no limitativo. Aunque por concisión y simplicidad, se explicará el procesado principalmente en referencia a la carga del camión, la misma es aplicable al proceso de descarga. Lo único hay que tener en cuenta que los valores de ejemplo de los parámetros mencionados a continuación para los procesos de carga y descarga pueden y suelen ser diferentes. - Lógicamente, la frecuencia con la que las carretillas/personas circulan hacia el interior/exterior del camión depende del tipo y tamaño de objetos/bultos que transporte el camión, de la longitud del camión, del tipo de carretilla utilizado, de la persona/personas que realizan dicha carga o descarga, de la distancia entre el camión y las estructuras de almacenamiento (estanterías) , etc.. A modo de ejemplo, puede haber cargas que generen una señal del sensor "T" detectando la presencia de una persona o carretilla en el muelle cada 30 segundos, otros cada 3 minutos, otros cada 8 minutos, etc. - Se calcula un Tiempo Ideal de carga, Ti, para cada bulto que se carga en el almacén en sus diferentes condiciones. Por bulto, se entiende un conjunto de objetos agrupados y que, por lo tanto, se cargan o descargan de una vez (normalmente porque es el número de objetos que vienen empaquetados juntos) . Para calcular dicho tiempo ideal, se puede reproducir la situación de carga del camión en condiciones ideales (sin obstáculos o problemas que perjudiquen al proceso de carga) . En estas circunstancias, el sensor T mide los tiempos reales de cada carga individual y los envía (directamente o a través de un equipo de recogida de datos) al dispositivo de explotación o a la base de datos. Como se ha explicado, en base a estos datos medidos en cada carga individual (en condiciones ideales) , el algoritmo desarrollado calcula, por ejemplo, el tiempo mínimo de carga (Tmin) , el tiempo máximo de carga (Tmax) y el Tiempo medio de carga (Tmed) de cada bulto. En una realización, el tiempo medio de carga en condiciones ideales es lo que se tomará como Tiempo Ideal de carga, Ti. También se pueden calcular otros valores estadísticos como por ejemplo la Desviación media o la Varianza o cualquier otro. Tmin, Tmax, Tmed y Ti serán asociados al sensor "T" de cada ubicación de carga/descarga (y, preferiblemente, de cada tipo de objeto) , relacionados con la frecuencia de circulación (de una persona o de una carretilla en la tarea de carga) , con el tipo de bultos transportados por el camión, etc. Esta parametrización proporciona enorme flexibilidad y fiabilidad de la información. En una realización, estos parámetros (Tmin, Tmax, Tmed, Ti...) se pueden actualizar con el histórico de valores reales del tiempo de carga medidos durante un cierto periodo de tiempo anterior. - En una realización, para determinar cuándo se está cargando un camión, se utilizará el tiempo "Tmax", al que se añadirá un Tiempo de Tolerancia "Ttol" (este parámetro "Ttol" es configurable) . Por ejemplo, si se considera un bulto tiene un tiempo de carga "Tmax" de 100 segundos; se creará un parámetro Tiempo de Referencia (también llamado umbral de tiempo) de carga "Tref", que será la suma de "Tmax" más "Ttol": "Tref" = ("Tmax" + "Ttol") . Si se define por ejemplo un "Ttol" del 20% (20 segundos en este caso) , obtendremos un "Tref" de 120 segundos (estos valores, son solo ejemplos ilustrativos; y se pueden usar cualesquiera otros valores) . De este modo, al "Tmax" obtenido midiéndolo en condiciones ideales, se aplica una tolerancia "Ttol" configurable (por ejemplo, a través de una aplicación software en el dispositivo de explotación) y se obtiene el "Tref como suma de ambos (esto es solo un ejemplo, y este tiempo de referencia o umbral se puede determinar de muchas otras formas) . - En una realización, durante la carga de un camión, tras una señal de cruce (de una persona o de una carretilla) del sensor T, se esperará a ver si se produce otra señal del sensor "T". Si se produce otra señal de cruce antes de que pase el tiempo de referencia Tref (en este caso de ejemplo 120 segundos) , se resetea el contador a 0 y se espera a la siguiente señal de cruce antes de ese Tref. Durante todo este tiempo se considera que se está cargando (modo trabajando, es decir, se está incrementando el contador Ttrabajando) . Es decir, mientras que el tiempo transcurrido entre dos señales de cruce consecutivas sea menor que Tref, se considera que se está cargando el camión y por lo tanto se está trabajando y todo el tiempo transcurrido se irá computando como de modo "trabajando". Se está suponiendo que el sensor P ha detectado la señal de que el muelle está ocupado (si el muelle no está ocupado, no puede haber carga o descarga, por lo que típicamente no se analizan las señales provenientes del sensor T en ese periodo) . En el momento en que no se produce otra señal de cruce antes de "Tref", a partir ese momento se registrará un modo que indica que la carga del camión está Parado (modo "Sin trabajar" o "Inactivo") , y se mantendrá este modo hasta que se produzca una nueva señal de este sensor "T" (es decir, se está incrementando el contador Tinactivo) o hasta que el sensor P informe de que el camión ya no ocupa la ubicación de carga/descarga (es decir, el camión se ha ido y se ha terminado el proceso de carga/descarga) . Estas Paradas (periodos en los que no se obtiene una señal de cruce procedente del sensor T) pero hay un camión en el muelle, pueden tener una duración variable y su causa puede ser registrada, en algunos casos automáticamente (por ejemplo mediante sensores que detectan la causa de la parada) o en otros casos gracias a la declaración de un operario, por ejemplo a través de un dispositivo electrónico (llamado Interface de Operario, dispositivo "I" en la figura 1) con una interface de usuario que permite al operario introducir que ha habido una parada y su causa. Aunque en la figura 1 sólo se muestra un Interface de Operario, esto es solo un ejemplo y puede haber más de uno (o ninguno, si no se estima necesario) . Causas típicas de este tipo de paradas son, por ejemplo: Falta de los objetos de carga (están sin preparar, siniestro, verificaciones, retraso ruta previa) ; averías (avería de máquina, avería del muelle, cambio de batería, avería de sistema informático, siniestro en la carga/descarga, avería scanner...) ; paradas relacionadas con recursos (falta de carretilla, problemas de posicionamiento de camión en muelle, retraso de camión, camión en pausa, falta de operario, falta de scanner.) . Mientras se esté produciendo la carga del camión (modo "Trabajando") se puede medir exactamente el tiempo de carga exacto de cada bulto (por ejemplo 149" o 154" o cualquier otro) , que permitirá además hacer cálculos estadísticos por bulto, como medias, desviaciones, etc., y compararlas con los tiempos predefinidos. El tiempo entre señales del sensor T se corresponde con el tiempo de carga del bulto. A modo de ejemplo no limitativo, el tiempo de carga de del bulto puede medirse, al menos, de las siguientes maneras: • Si sólo utilizamos una fotocélula como sensor T, la primera señal se produce cuando entra a cargar el primer bulto, la segunda señal cuando sale a buscar el segundo bulto y la tercera señal cuando vuelve a cargar el segundo bulto, y así sucesivamente; el tiempo entre la primera y la tercera señal es el tiempo total de carga del segundo bulto, desglosado en 2 partes: tiempo de ir a buscarlo al almacén y tiempo de depositarlo en el camión) • Si, por ejemplo, el sensor T lo forman 2 fotocélulas, una detrás de la otra, podemos saber el sentido del tráfico, si se está entrando o saliendo del camión/muelle; el tiempo de carga de un bulto se corresponde con dos entradas consecutivas. El uso de 2 fotocélulas consecutivas como en el ejemplo anterior, además de servir para medir el tiempo de carga, proporciona también información sobre el sentido del tráfico e incluso la velocidad a la que se desplaza la carretilla/operario, con objeto de medirla y optimizarla. - En la explicación anterior se ha considerado que para determinar "Tmin", "Tmax" y "Tmed", entre otros parámetros, se mide realmente, en condiciones ideales el proceso de carga del camión. Aunque esto es lo ideal, no tiene por qué ser necesario; así en una realización, estos parámetros se pueden ir midiendo y calculando en condiciones reales desde la primera carga. Así, por ejemplo, el "Tmin" puede considerarse el tiempo mínimo de carga registrado a lo largo del tiempo anterior; el "Tref" podrá ser inicialmente varias veces el "Tmin" (típicamente 3 veces) , lo que permitirá medir y calcular inicialmente el "Tmed", automáticamente descontando las paradas largas; una vez se tenga el "Tmin" y el "Tmed", podremos calcular el "Tmax", que equidistará del "Tmed" lo mismo que "Tmin". Una vez se disponga de este "Tmax" real, se podrá calcular un "Tref" más ajustado a la realidad que el considerado inicialmente, aplicando el parámetro configurable "Ttol" (típicamente el 20% aunque puede tomar cualquier otro valor) . Esto es solo un ejemplo, y se pueden usar otros algoritmos para el cálculo de "Tmin", "Tmax" y "Tmed" a partir de las medidas en tiempo real. Además, en una realización, se propone mejorar la eficiencia del almacén, en concreto mejorando los tiempos de posicionamiento del camión en el muelle o portón mediante la obtención de parámetros que afectan a dicho proceso. Para ello se realizan las siguientes tareas, en uno o más procesadores electrónicos (éste es un ejemplo no limitativo y no todas las tareas son obligatorias) : - Detección del momento de llegada del vehículo de carga/descarga (camión) al almacén o a las instalaciones donde se encuentra el almacén. Esto se puede hacer de numerosas maneras: Por ejemplo, mediante la información recibida del sensor L que nos indica la localización del camión, mediante la información recibida del sensor R que nos indica que un determinado camión (cuya matrícula ha leído) ha llegado a las instalaciones o mediante un empleado (por ejemplo, una persona de la oficina o guarda de seguridad o cualquier operario) que ve el camión y lo indica al dispositivo de explotación de datos (por ejemplo, ediante una aplicación informática realizada para ello en cualquier dispositivo electrónico o mediante el dispositivo de interfaz operario) . - Detección del momento en el que el camión llega a la ubicación de carga/descarga mediante la lectura del sensor P situado en dicha ubicación. - Obtener la diferencia entre los dos tiempos anteriores indicará el tiempo que ha tardado el camión en posicionarse en el muelle. Si el valor de este parámetro es muy alto, se pueden cambiar factores de diseño del almacén para mejorarlo. - Gracias a los sensores que se utilizan, se conoce en todo momento la ocupación de las ubicaciones de carga/descarga, por lo que cuando se detecta que el camión llega a las instalaciones se le puede indicar automáticamente (por ejemplo, mediante un mensaje a un dispositivo de usuario del conductor del camión) a qué muelle/portón debe dirigirse, lo que agiliza el posicionamiento del camión al muelle y reduce el tiempo de no ocupación de los muelles. Adicionalmente, mediante la tecnología GPS o similar, el sistema también conoce la posición del camión fuera de las instalaciones, por ejemplo, cuando se encuentra a una determinada distancia de las mismas, por lo que puede gestionar con antelación a qué muelle va a dirigir al camión e incluso acelerar o detener la carga/descarga en algún muelle para desocuparlo, o mandar desocupar uno de los muelles si la carga/descarga ha terminado y aún sigue ocupado. Esto son solo ejemplos (no limitativos) de acciones que se pueden tomar a partir de la determinación de estos parámetros y que permiten una mejor utilización de los recursos y, por lo tanto, una mejora en la gestión del almacén. En una realización, se propone además mejorar la eficiencia del almacén, en concreto mejorando la utilización y eficiencia de los vehículos de transporte interno (carretillas) , por ejemplo, consiguiendo una reducción de los tiempos de transporte, del espacio que tienen que recorrer, optimizando los volúmenes y pesos transportados...; mediante la obtención de parámetros que afectan a dicho proceso (transporte en carretillas) . Para ello se realizan las siguientes tareas, en uno o más procesadores electrónicos (éste es un ejemplo no limitativo y no todas las tareas son obligatorias) : - Detección del estado de movimiento o parada de cada carretilla. Preferiblemente esto se realiza a partir de la información recibida del sensor de movimiento (M1) de la carretilla, mediante el cual se conocerá si la carretilla está en movimiento o parada. La causa del paro de la carretilla se podrá detectar en algunos casos automáticamente (por ejemplo mediante sensores que detectan la causa de la parada) o en otros casos gracias a la declaración de un operario, por ejemplo a través de un dispositivo electrónico (Interface de Operario "I") que permite a un operario del almacén introducir que ha habido una parada y su causa. - Detección de si cada carretilla lleva carga o no, las características de lo que transporta (volumen y/o peso) así como cuando carga o descarga los bultos que transporta (es decir, cuando una carretilla pasa de estar sin carga a estar con carga o viceversa) . Preferiblemente esto se realiza a partir de la información recibida del sensor de volumen (V) de la carretilla - Determinación de la localización de una o más carretillas, preferiblemente mediante la información recibida de su sensor de localización (U1) que permiten conocer la localización de una carretilla. - Determinación de la distancia (por ejemplo, los metros) recorrida por cada carretilla en cada modo (transportando bultos o en vacío) . Esta determinación se puede hacer a partir de la información recibida de sensores específicos (E1) que miden el espacio recorrido por cada carretilla o, alternativamente, a partir de la información de localización de cada carretilla en cada momento recogida por cada sensor de localización U1. - Todos los parámetros determinados (estado de movimiento y carga de cada carretilla, localización de la misma, espacio recorrido...) se pueden relacionar automáticamente con el tipo de objeto o bulto que se trata, o más en concreto con los datos que describen los objetos o bultos tratados, llamado datos del componente (C en la figura 1) . Estos datos se obtienen generalmente de la base de datos de información del almacén. En una realización, esta información sobre los objetos o bultos almacenados se obtienen del llamado Sistema de Planificación de Recursos Empresariales (ERP de sus siglas en inglés) del almacén. - La determinación de estos parámetros permite conocer en todo momento las características del proceso de transporte de cada carretilla, como por ejemplo, el estado de movimiento y carga de cada carretilla, localización de la misma o el espacio recorrido por cada una de ellas en un periodo de tiempo. Esto permite mejorar la eficiencia de la utilización de cada carretilla y del almacén en general. Así por ejemplo, si se detecta que una carretilla está mucho tiempo sin carga, se puede destinar durante ese tiempo a la descarga de otro camión; o si se detecta que una carretilla recorre mucho espacio se puede asignar a una tarea de transporte en otro muelle o a otra estantería, que haga que la distancia recorrida sea menor...Esto son solo ejemplos (no limitativos) , de acciones que se pueden tomar a partir de la determinación de estos parámetros y que permiten una mejor utilización de los recursos y, por lo tanto, una mejora en la gestión del almacén. En una realización, se propone además mejorar la eficiencia del almacén, en concreto mejorando la utilización y eficiencia de los terminales manuales de recogida/colocación de bultos u objetos (llamados terminales de "picking") , por ejemplo, consiguiendo una reducción de los tiempos empleados durante la recogida/colocación y de los espacios recorridos por los terminales de transporte.; mediante la obtención de parámetros que afectan al proceso de funcionamiento de dichos terminales. Para ello se realizan las siguientes tareas, en uno o más procesadores electrónicos (éste es un ejemplo no limitativo y no todas las tareas son obligatorias) : - Detección del estado de movimiento o parada de cada terminal. Preferiblemente esto se realiza a partir de la información recibida del sensor de movimiento (M2) del terminal, mediante el cual se conocerá si está en movimiento o parado. La causa del paro del terminal se podrá detectar en algunos casos automáticamente (por ejemplo mediante sensores que detectan la causa de la parada) o en otros casos gracias a la declaración de un operario, por ejemplo, a través de un dispositivo electrónico (Interface de Operario "I") que permite a un operario del almacén introducir que ha habido una parada y su causa. - Determinación de la localización de una o más terminales, preferiblemente mediante la información recibida de su sensor de localización (U2) que permiten conocer la localización de un terminal. - Determinación de la distancia (por ejemplo, los metros) recorrida por cada terminal para la recogida/colocación de cada bulto concreto. Esta determinación se puede hacer a partir de la información recibida de sensores específicos (E2) que miden el espacio recorrido por cada terminal o, alternativamente, a partir de la información de localización de cada terminal en cada momento recogida por cada sensor de localización U2. - Todos los parámetros determinados (estado de movimiento de cada terminal, localización del mismo, espacio recorrido...) se pueden relacionar automáticamente con el tipo de objeto o bulto que recoge o coloca el terminal, o más en concreto con los datos que describen los objetos o bultos seleccionados por el terminal, llamado datos del componente (C en la figura 1) . Así, por ejemplo, se podría obtener la frecuencia con la que se recoge o coloca (y, por lo tanto, la de carga o descarga) cada objeto o bulto. Estos datos de componente se obtienen generalmente de la base de datos de información del almacén. En una realización, esta información sobre los objetos o bultos almacenados se obtienen del llamado Sistema de Planificación de Recursos Empresariales (ERP de sus siglas en inglés) del almacén. La captura de datos del componente (C en la figura 1) juega un papel importante en aquellos supuestos en los que el terminal o carretilla no disponga de sensores de movimiento M, ni de posición U, ni de espacio recorrido E, pero sí estén conectados al ERP, ya que esto permitirá conocer en tiempo real cada vez que el terminal o la carretilla recoge o coloca el bulto; por tanto, siguiendo la misma descripción que para el caso de la carga/descarga de camiones, nos permitirá saber si están trabajando Ttrabajando o inactivos Tinactivo, y medir su Tmin, Tmax, Tmed, Tref, Disp, OEE, etc. Cuando se producen 2 capturas de datos de (C) dentro de un umbral de tiempo, se considera que el terminal está trabajando, Ttrabajando; si no, se considera que está parado, Tinactivo. - La determinación de estos parámetros permite conocer en todo momento las características del proceso de transporte de cada terminal, como por ejemplo, el estado de movimiento de cada terminal, localización del mismo, espacio recorrido por cada terminal en un periodo de tiempo, frecuencia de carga o descarga de cada bulto.. Esto permite mejorar la eficiencia de la utilización de cada terminal y del almacén en general. Así por ejemplo, si se detecta que un terminal está mucho tiempo sin moverse, se puede destinar durante ese tiempo a otra estantería (si son movibles) ; o si se detecta que un terminal recorre mucho espacio, se pueden recolocar los objetos en las estanterías de manera que la distancia ecorrida por cada terminal sea menor...Esto son solo ejemplos (no limitativos) , de acciones que se pueden tomar a partir de la determinación de estos parámetros y que permiten una mejor utilización de los recursos y, por lo tanto, una mejora en la gestión del almacén. En este texto, el término "comprende" y sus derivaciones (como "comprendiendo", etc.) no deben entenderse en un sentido excluyente, es decir, estos términos no deben interpretarse como excluyentes de la posibilidad de que lo que se describe y define pueda incluir más elementos, etapas, etc. La presente invención se puede aplicar en cualquier tipo de instalaciones donde se realice almacenaje de objetos de cualquier tipo. Algunas realizaciones preferidas de la invención se describen en las reivindicaciones dependientes que se incluyen seguidamente. Descrita suficientemente la naturaleza de la invención, así como la manera de realizarse en la práctica, hay que hacer constar la posibilidad de que sus diferentes partes podrán fabricarse en variedad de materiales, tamaños y formas, pudiendo igualmente introducirse en su constitución o procedimiento, aquellas variaciones que la práctica aconseje, siempre y cuando las mismas, no alteren el principio fundamental de la presente invención. Esta descripción detallada se aporta para ayudar a un entendimiento completo de la invención. Por lo tanto, los expertos en la materia reconocerán que variaciones, cambios o modificaciones de las realizaciones descritas aquí pueden llevarse a cabo sin salir del ámbito de protección de la invención. También, la descripción de funciones y elementos sobradamente conocidos se omiten por claridad y concisión. La descripción y los dibujos simplemente ilustran los principios de la invención. Por lo tanto, debe apreciarse que los expertos en la técnica podrán concebir varias disposiciones que, aunque no se hayan descrito o mostrado explícitamente en este documento, representan los principios de la invención y están incluidas dentro de su alcance. Además, todos los ejemplos descritos en este documento se proporcionan principalmente por motivos pedagógicos para ayudar al lector a entender los principios de la invención y los conceptos aportados por el (los) inventor (es) para mejorar la técnica, y deben considerarse como no limitativos con respecto a tales ejemplos y ondiciones descritos de manera específica. Además, todo lo expuesto en este documento relacionado con los principios, aspectos y realizaciones de la invención, así como los ejemplos específicos de los mismos, abarcan equivalencias de los mismos. Aunque la presente invención se ha descrito con referencia a realizaciones específicas, los expertos en la técnica deben entender que los anteriores y diversos otros cambios, omisiones y adiciones en la forma y el detalle de las mismas pueden realizarse sin apartarse del alcance de la invención tal como se definen mediante las reivindicaciones siguientes.
Publicaciones:
ES2912599 (26/05/2022) - A1 Solicitud de patente con informe sobre el estado de la técnica
ES2912599 (25/11/2022) - B2 Patente de invención con examen
Eventos:
En fecha 25/11/2020 se realizó Registro Instancia de Solicitud
En fecha 25/11/2020 se realizó Admisión a Trámite
En fecha 25/11/2020 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 26/11/2020 se realizó Superado examen de oficio
En fecha 25/10/2021 se realizó Realizado IET
En fecha 26/10/2021 se realizó 1109P_Comunicación Traslado del IET
En fecha 15/11/2021 se realizó Anotación Solicitud Cambio de Nombre
En fecha 28/12/2021 se realizó Inscripción de cambio de nombre de titular
En fecha 28/12/2021 se realizó Alta mandatario por inscripción de transmisión F202131117
En fecha 24/03/2022 se realizó 5215P_Observaciones del solicitante al IET, Opinión Escrita y/o alegaciones a observaciones de terceros
En fecha 24/03/2022 se realizó PETEX_Petición de examen sustantivo
En fecha 26/05/2022 se realizó Publicación Solicitud
En fecha 26/05/2022 se realizó Publicación Folleto Solicitud con IET (A1)
En fecha 12/09/2022 se realizó Validación petición y/o pago de examen sustantivo conforme
En fecha 10/11/2022 se realizó Designación de Comisión de Expertos
En fecha 11/11/2022 se realizó Finalización de Examen Sustantivo
En fecha 11/11/2022 se realizó 6121P_Comunicación finalización de examen sustantivo
En fecha 17/11/2022 se realizó Publicación finalización de examen sustantivo
En fecha 18/11/2022 se realizó Concesión con examen sustantivo
En fecha 18/11/2022 se realizó Entrega título
En fecha 18/11/2022 se realizó 6125P_Notificación de concesión con examen sustantivo
En fecha 25/11/2022 se realizó Publicación concesión Patente
En fecha 25/11/2022 se realizó Publicación Folleto Concesión
En fecha 25/05/2023 se realizó Plazo expirado presentación de oposiciones contra la concesión de la Patente
Pagos:
25/11/2020 - Pago Tasas IET
01/12/2022 - Pago 03 Anualidad
01/12/2023 - Pago 04 Anualidad
Fuente de la información
Parte de la información aquí publicada es pública puesto que ha sido obtenida de la Oficina de Propiedad Industrial de los diferentes países el 26/04/2024 y por lo tanto puede ser que la información no esté actualizada.Parte de la información aquí mostrada ha sido calculada por nuestro sistema informático y puede no ser veraz.
Privacidad
Si considera que al información aquí publicada afecta a su privacidad y desea que eliminemos la información aquí publicada envíe un email a info@patentes-y-marcas.com o rellene el formulario que encontrará aquí.Información sobre el registro de patente nacional por SISTEMA Y MÉTODO PARA LA GESTIÓN DE ALMACENES con el número P202031183
El registro de patente nacional por SISTEMA Y MÉTODO PARA LA GESTIÓN DE ALMACENES con el número P202031183 fue solicitada el 25/11/2020. Se trata de un registro en España por lo que este registro no ofrece protección en el resto de países. El registro SISTEMA Y MÉTODO PARA LA GESTIÓN DE ALMACENES con el número P202031183 fue solicitada por ZEO TECHNOLOGY FOR INDUSTRY, S.L. mediante los servicios del agente Felipe Fernández Pou. El registro [modality] por SISTEMA Y MÉTODO PARA LA GESTIÓN DE ALMACENES con el número P202031183 está clasificado como G06Q 10/08 según la clasificación internacional de patentes.
Otras invenciones solicitadas por ZEO TECHNOLOGY FOR INDUSTRY, S.L.
Es posible conocer todas las invenciones solicitadas por ZEO TECHNOLOGY FOR INDUSTRY, S.L. entre las que se encuentra el registro de patente nacional por SISTEMA Y MÉTODO PARA LA GESTIÓN DE ALMACENES con el número P202031183. Si se desean conocer más invenciones solicitadas por ZEO TECHNOLOGY FOR INDUSTRY, S.L. clicar aquí.Otras invenciones solicitadas en la clasificación internacional de patentes G06Q 10/08.
Es posible conocer invenciones similares al campo de la técnica se refiere. El registro de patente nacional por SISTEMA Y MÉTODO PARA LA GESTIÓN DE ALMACENES con el número P202031183 está clasificado con la clasificación G06Q 10/08 por lo que si se desea conocer más registros con la clasificación G06Q 10/08 clicar aquí.Otras invenciones solicitadas a través del representante FELIPE FERNÁNDEZ POU
Es posible conocer todas las invenciones solicitadas a través del agente FELIPE FERNÁNDEZ POU entre las que se encuentra el registro patente nacional por SISTEMA Y MÉTODO PARA LA GESTIÓN DE ALMACENES con el número P202031183. Si se desean conocer más invenciones solicitadas a través del agente FELIPE FERNÁNDEZ POU clicar aquí.Patentes en España
Es posible conocer todas las invenciones publicadas en España entre las que se encuentra el registro patente nacional por SISTEMA Y MÉTODO PARA LA GESTIÓN DE ALMACENES. Nuestro portal www.patentes-y-marcas.com ofrece acceso a las publicaciones de patentes en España. Conocer las patentes registradas en un país es importante para saber las posibilidades de fabricar, vender o explotar una invención en España.Patentes registradas en la clase G
Es posible conocer todas las patentes registradas en la clase G (FISICA) entre las que se encuentra la patente SISTEMA Y MÉTODO PARA LA GESTIÓN DE ALMACENES con el número P202031183. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase G06
Es posible conocer todas las patentes registradas en la clase G06 (COMPUTO; CALCULO; CONTEO) entre las que se encuentra la patente SISTEMA Y MÉTODO PARA LA GESTIÓN DE ALMACENES con el número P202031183. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase G06Q
Es posible conocer todas las patentes registradas en la clase G06Q (METODOS O SISTEMAS DE PROCESAMIENTO DE DATOS ESPECIALMENTE ADAPTADOS PARA FINES ADMINISTRATIVOS, COM) entre las que se encuentra la patente SISTEMA Y MÉTODO PARA LA GESTIÓN DE ALMACENES con el número P202031183. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.
¿Tienes alguna duda?
Escribe tu consulta y te responderemos rápida y gratuitamente.

Otras patentes similares
PROCEDIMIENTO PARA FIJACIÓN DE DIÓXIDO DE CARBONO EN FASE ACUOSA
 P202031120
P202031120 P202031182
P202031182
SACCHAROMYCES CEREVISIAE RECOMBINANTE PARA LA PRODUCCIÓN DE HIDROXITIROSOL
P202031186Profesionales Recomendados
Barcelona
933182440
España
933182440
España

Barcelona
+34 93 362 16 97
España
+34 93 362 16 97
España

Barcelona
932 593 600
España
932 593 600
España







