


- Home /
- Publicaciones de patentes /
- SISTEMA REGULADOR DE PRESIONES PARA MANIPULADORES DE CARGA INGRÁVIDOS
Patente nacional por "SISTEMA REGULADOR DE PRESIONES PARA MANIPULADORES DE CARGA INGRÁVIDOS"
Este registro ha sido solicitado por
TALLERES J. ANGEL BACAICOA, S.L.
a través del representanteMIKEL VEIGA SERRANO
Contacto
- Estado: Vigente
- País:
- España
- Fecha solicitud:
- 08/09/2022
- Número solicitud:
-
P202230797
- Número publicación:
-
ES2964635
- Fecha de concesión:
-
- Inventores:
-
Persona física
- Datos del titular:
-
TALLERES J. ANGEL BACAICOA, S.L.
- Datos del representante:
-
Mikel Veiga Serrano
- Clasificación Internacional de Patentes:
- B25J 19/00,F15B 11/028,B66C 23/00
- Clasificación Internacional de Patentes de la publicación:
- B25J 19/00,F15B 11/028,B66C 23/00
- Fecha de vencimiento:
Quiero registrar una patente

Reivindicaciones:
+ ES-2964635_A11.- Sistema regulador de presiones para manipuladores de carga ingrávidos, de aplicación en manipuladores de carga ingrávidos que comprenden un conjunto operativo (1) formado por un cilindro actuador neumático (3) , mediante el cual se ejecutan las acciones de manipulación de cargas (4) a manejar, y una célula de carga (5) con un émbolo (12) desde el cual se suspenden las cargas (4) que define una subcámara superior (5.1) y una subcámara inferior (5.2) , estando relacionada dicha célula de carga (5) con el cilindro actuador neumático (3) por medio de un conjunto de regulación (2) , mediante el cual se regula la alimentación a aplicar a través de una válvula de regulación (7) en función de la variación de peso de las cargas (4) , caracterizado por que el conjunto de regulación (2) comprende una célula de conversión de presiones (6) con un cilindro neumático que dispone de un émbolo (11) provisto con dos diámetros diferentes (D1, D2) que definen una cámara inferior (8) disponible en comunicación con la subcámara inferior (5.2) de la célula de carga (5) , y una cámara superior (9) en comunicación con el cilindro actuador neumático (3) . 2.- Sistema regulador de presiones para manipuladores de carga ingrávidos, de acuerdo con la reivindicación 1, caracterizado por que la parte superior de la cámara inferior (8) de la célula de conversión de presiones (6) posee una salida (17) comunicada al exterior. 3.- Sistema regulador de presiones para manipuladores de carga ingrávidos, de acuerdo con las reivindicaciones 1 o 2, caracterizado por que en el conjunto de regulación (2) se incorpora un transductor (15) de conversión de la señal de presión en señal eléctrica, el cual se dispone entre la célula de conversión de presiones (6) y la válvula de regulación (7) . 4.- Manipulador de carga ingrávido que comprende un sistema regulador de presiones según una cualquiera de las reivindicaciones anteriores, que comprende una célula de carga (5) en comunicación con la célula de conversión de presiones (6) , y un cilindro actuador neumático (3) en comunicación con dicha célula de conversión de presión (6) . 5.- Manipulador de carga ingrávido de acuerdo con la reivindicación anterior, caracterizado por que la relación entre diámetros (D1, D2) del émbolo (11) de la célula de conversión de resiones (6) es proporcional a las distintas relaciones de diámetros y/o inclinaciones entre el cilindro actuador neumático (3) y la célula de carga (5) .
Los productos y servicios protegidos por este registro son:
B25J 19/00 - F15B 11/028 - B66C 23/00
Descripciones:
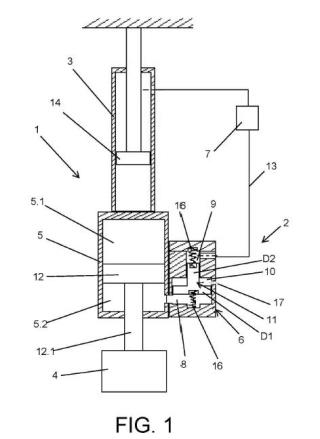
+ ES-2964635_A1 SISTEMA REGULADOR DE PRESIONES PARA MANIPULADORES DE CARGA INGRÁVIDOS Sector de la técnica La presente invención está relacionada con el manejo de cargas pesadas mediante ingravidez, refiriéndose concretamente a un sistema de regulación de presiones para un manipulador de cargas ingrávido, permitiendo este sistema la estabilización del manipulador de carga ingrávido mediante conversión de la presión ejercida por el peso de la carga manejada en una presión adecuada para ser aplicada a un cilindro neumático actuador con el que se ejecuta la manipulación de la carga. Estado de la técnica Para ayudar a los operarios a manejar cargas pesadas suspendidas en el aire sin comprometer su seguridad, la tecnología ha desarrollado máquinas manipuladoras de cargas, denominadas manipuladores ingrávidos, las cuales sostienen a las cargas en el aire, permitiendo trabajar con ellas fácilmente. El estado de la técnica recoge diferentes tipos de manipuladores ingrávidos, unos de los cuales son accionados por aire comprimido y otros mediante una célula electrónica, de modo que, aunque ambas soluciones asisten en el manejo de cargas pesadas, cada solución presenta una serie de inconvenientes. En el caso de manipuladores ingrávidos accionados por aire comprimido, únicamente son capaces de manejar cargas de un mismo peso, suponiendo esto una notable limitación, ya que para manejar cargas de diferentes pesos deben modificarse los elementos de la regulación neumática, con la consiguiente pérdida de tiempo y retrasos en las tareas a realizar. Por otro lado, los manipuladores ingrávidos accionados que funcionan mediante una célula electrónica tienen el inconveniente de que su coste de instalación es muy alto. Se conoce también una solución planteada en el documento ES2235563, que divulga un manipulador de cargas ingrávido, totalmente neumático, el cual se autorregula en función del peso de la carga que se maneja, mejorando así la manipulación en condiciones de ingravidez. Dicho manipulador de cargas ingrávido comprende un conjunto operativo y un conjunto de regulación, estando formado el conjunto operativo por un cilindro neumático actuador, mediante el que se realizan las acciones para el manejo de la carga, la cual se sujeta colgada de una célula de carga, quedando dicha célula de carga relacionada con el cilindro neumático actuador del conjunto operativo a través del conjunto de regulación, el cual comprende una válvula reguladora conectada, por un lado, a la célula de carga y, por otro lado, al cilindro neumático actuador del conjunto operativo, de manera que dicho conjunto de regulación realiza una función por la cual determina el nivel de alimentación neumática al cilindro neumático actuador en función del peso de la carga que se maneja con el manipulador ingrávido. Tanto el cilindro neumático actuador del conjunto operativo como la célula de carga desde la que se suspenden las cargas a manejar, comprenden unos émbolos desde los que se extienden unos vástagos que salen al exterior, de manera que mediante el vástago del cilindro neumático actuador del conjunto operativo se sujeta el manipulador ingrávido a una estructura fija de anclaje, mientras que respecto del vástago de la célula de carga se sujeta la carga a manejar. Esta solución del documento ES2235563 solventa en parte los inconvenientes de las soluciones convencionales anteriormente descritas, pero el hecho de que el diámetro de los émbolos del cilindro neumático actuador del conjunto operativo y de la célula de carga de control sea igual limita mucho las posibilidades de aplicación, ya que dicha solución no puede utilizarse cuando son necesarios manipuladores en los que por cuestiones de diseño se requiera que los émbolos tengan diferentes secciones. Además, esta solución no es válida para otro tipo de manipuladores ingrávidos como los paralelogramos y los horizontales. En los paralelogramos el cilindro de actuación del brazo está dispuesto en diagonal, por lo que las presiones deben tener la proporción adecuada para facilitar el mismo recorrido. Para ello una solución es ajustar el aire que se introduce en el segundo émbolo, con el empleo de una válvula proporcional que calcula el aire a introducir para compensar el peso de la carga, in embargo, esta solución encarece y complica la instalación al tener que electrificarla. Por otra parte, los manipuladores ingrávidos horizontales son empleados cuando hay techos bajos que no permiten el uso del cilindro en vertical, y se basan en que el cilindro de actuación se introduce en el vástago horizontal de la estructura elevando la carga mediante poleas. En este caso, al comprender poleas, la relación de presiones no es igual por lo que al extraer aire de la primera cámara debería introducirse el doble de cantidad en la segunda cámara para mantener la ingravidez. Por los inconvenientes descritos de las soluciones convencionales, se hace necesario el desarrollo de un sistema de regulación de presiones para los manipuladores ingrávidos de accionamiento neumático que no utilice elementos que encarezcan el producto y que permita la aplicación en cualquier tipo de manipuladores ingrávidos. Objeto de la invención Para alcanzar los objetivos propuestos anteriormente, la presente invención propone un sistema de regulación de presiones para manipuladores de carga ingrávidos, con el cual se reducen considerablemente los costes de fabricación al utilizar elementos normalizados, no customizados, pudiendo además ser utilizado este sistema de regulación en todo tipo de manipuladores ingrávidos de accionamiento neumático: verticales, horizontales, paralelogramos. Dicho sistema de regulación de presiones objeto de la invención comprende una célula de conversión de presiones, la cual se dispone entre la célula de carga de la que se cuelgan las cargas a manejar y la válvula reguladora desde la que se alimenta el cilindro neumático actuador del conjunto operativo del manipulador ingrávido, de manera que en dicha célula de conversión de presiones se ajustan las presiones para que a la válvula reguladora le llegue la presión necesaria, adaptada a la carga que se maneja, para realizar el movimiento de manipulación. La célula de conversión de presiones comprende dos cámaras, una inferior y otra superior, de diferentes tamaños y separadas entre sí por un émbolo diseñado con dos diámetros distintos, de manera que merced a la relación de dichos diámetros del mencionado émbolo se realiza un escalado ascendente/descendente entre la presión de salida de la célula de carga y la resión de entrada al cilindro neumático en función de la relación existente entre ambos. De este modo la válvula reguladora realiza el ajuste necesario para llevar la presión necesaria al cilindro neumático actuador del conjunto operativo, el cual se adapta así a las variaciones del peso de la carga que se maneja con el manipulador ingrávido, ajustándose la presión en función de la relación entre las distintas características de diseño entre el cilindro actuador neumático y el cilindro de la célula de carga. Esta configuración facilita una regulación de presiones por ejemplo en instalaciones en las que por requerimientos de diseño sean diferentes los diámetros de émbolo del cilindro actuador neumático con respecto del de la célula de carga, de forma que la relación entre diámetros del émbolo de la célula de conversión de presiones es proporcional a la relación entre diámetros de los émbolos del cilindro actuador y la célula de carga. Esta situación se puede dar por ejemplo cuando al integrarse el cilindro actuador en el brazo del manipulador ingrávido es necesario reducir sus dimensiones. También es especialmente indicada dicha configuración para manipuladores de carga ingrávidos paralelogramos en los que el cilindro actuador se dispone en posición diagonal, de forma que la relación entre diámetros del émbolo de la célula de conversión de presiones es proporcional al ángulo entre ambos cilindros. Asimismo, esta configuración podría ser empleada en manipuladores de carga ingrávidos horizontales para el equilibrado de presiones. Así, con este sistema de regulación de presiones objeto de la invención se evita la necesidad de complejas conexiones y el uso de numerosas válvulas actuables en la realización del manipulador de carga ingrávido de aplicación, convirtiéndose en un diseño sencillo de implementar. Por otro lado, con la incorporación de la célula de conversión de presiones se consigue un coste de fabricación muy inferior a la fabricación con diferentes células de carga para cada tipo de cilindro neumático actuador en el conjunto operativo del manipulador de carga ingrávido, además de que la implementación y funcionalidad son muy sencillas, ya que únicamente se deben cuidar las proporciones entre los dos diámetros del émbolo de dicha célula de conversión de presiones. Además, el sistema regulador de presiones objeto de la invención tiene la ventaja de que se puede incorporar a cualquier tipo de manipuladores ingrávidos, como los de tipo horizontal, paralelogramos, etc., lo que aumenta el campo de utilidad y la flexibilidad en el mercado. Será también objeto de la invención un manipulador de carga ingrávido que comprenda un sistema regulador de presiones como el mencionado. Todo lo anteriormente descrito evidencia que el sistema de regulación de presiones objeto de la invención ofrece características ventajosas respecto de las soluciones convencionales de su misma aplicación, confiriéndole un carácter preferente en la manipulación ingrávida de cargas, para lo cual ha sido diseñado. Descripción de las figuras La figura 1 muestra un esquema del conjunto funcional de un manipulador que comprende el sistema de regulador de presiones objeto de la invención. La figura 2 es una vista esquemática como la anterior de otro ejemplo de realización práctica. Descripción detallada de la invención La presente invención se refiere a un sistema de regulación de presiones que se aplica en manipuladores de cargas ingrávidos que comprenden una parte actuadora con un conjunto operativo (1) formado por un cilindro actuador neumático (3) que actúa en función de una carga (4) a manejar, y una parte de control con una célula de carga (5) desde la cual se suspenden las cargas (4) , estableciéndose una relación entre ambas partes mediante un conjunto de regulación (2) por medio de una conexión (13) desde la célula de carga (5) hasta una válvula de regulación (7) que ajusta la presión a aplicar en dicho cilindro actuador neumático (3) en función de la variación de presión creada en la célula de carga (5) por la variación de peso de la carga (4) suspendida de ella y que posibilita su manipulación en condiciones de ingravidez. Como se puede ver en las figuras 1 y 2 el sistema regulador de presiones objeto de la invención es aplicable en reguladores de carga ingrávidos en los que el cilindro actuador neumático (3) del conjunto operativo (1) y el cilindro de la célula de carga (5) son de diferentes iámetros. Esta circunstancia se da cuando por razones de diseño es necesario disminuir el tamaño por ejemplo del cilindro actuador neumático (3) para su emplazamiento en el brazo del manipulador ingrávido. Según la realización práctica de la invención para contrarrestar esta diferencia de diámetro, el conjunto de regulación (2) comprende una célula de conversión de presiones (6) , la cual se dispone en comunicación con la célula de carga (5) . Preferentemente, dicha célula de conversión de presiones (6) se configura incorporando un mecanizado en la célula de carga (5) del manipulador ingrávido que deja pasar la presión que se genera en una subcámara inferior (5.2) de la célula de carga (5) a la célula de conversión de presiones (6) , comunicando por medio de la conexión (13) la célula de conversión de presiones (6) con la válvula de regulación (7) . Así, mediante dicha célula de conversión de presiones (6) se reajustan los diferentes valores de la presión que se originan entre el cilindro actuador (3) y la célula de carga (5) función de la diferencia de diámetros de los cilindros de la célula de carga (5) y el cilindro actuador (3) . Esta regulación permite pilotar la válvula de regulación (7) para aplicar al cilindro actuador neumático (3) del conjunto operativo (1) una presión adecuada en función del peso de la carga (4) que se maneja y de sus variaciones. Para realizar dicha regulación, la célula de conversión de presiones (6) comprende una cámara inferior (8) , y una cámara superior (10) , estando definidas dichas cámaras (8) y (10) por un émbolo (11) . Este émbolo (11) está constituido por dos diámetros (D1 y D2) diferentes, de tal modo que la relación entre dichos diámetros (D1 y D2) del émbolo (11) determina en la célula (6) una conversión de la presión recibida en la cámara inferior (8) desde la célula de carga (5) , adaptando dicha presión, a una presión en la cámara superior (10) adecuada para la alimentación del cilindro actuador neumático (3) del conjunto operativo (1) en función de la relación entre las diferentes presiones entre la célula (6) y el cilindro actuador (3) , de forma que a través de la válvula de regulación (7) se regula la presión a introducir en el cilindro actuador en función de las variaciones de peso de la carga (4) . La célula de carga (5) está formada, en su caso, por un cilindro neumático provisto con un émbolo (12) desde el que se extiende un vástago (12.1) desde el que se suspenden las cargas (4) a manejar, de tal forma que el peso de la carga (4) provoca el descenso del émbolo (12) dentro de la célula de carga (5) , generando una presión en una subcámara inferior (5.2) . Al estar la célula de conversión de presiones (6) en comunicación directa con la célula de carga (5) , dicha presión se traslada a la cámara inferior (8) de la célula de conversión de presiones (6) . Esta presión hace ascender al émbolo (11) de doble diámetro (D1 y D2) de la célula de conversión de presiones (6) , provocando en la cámara superior (10) de dicha célula e conversión de presiones (6) una presión diferente a la existente en la cámara inferior (8) , en base a la relación entre los diámetros (D1 y D2) del émbolo (11) , siendo esta relación proporcional a la relación existente entre diámetros del cilindro actuador (3) y la célula de carga (5) .De forma preferente, la parte superior de la cámara inferior (8) queda comunicada al exterior por una salida (17) , para permitir el movimiento del émbolo (11) , de igual manera que en el cilindro actuador neumático (3) y en la célula de carga (5) existen salidas de comunicación al exterior (no representadas) para permitir el movimiento de los émbolos (14, 12) . Una vez así, la nueva presión que se obtiene en la cámara superior (9) de la célula de conversión de presiones (6) , es transmitida a la válvula de regulación (7) , la cual envía la presión necesaria para alimentar al cilindro actuador neumático (3) del conjunto operativo (1) , adaptando con ello el funcionamiento del manipulador ingrávido en función de las variaciones de presión que se producen en la célula de carga (5) por efecto del peso de las cargas (4) que se manejan. Para dicha regulación, en el diseño de la instalación como se ha mencionado anteriormente, se establece la relación entre los diámetros (D1, D2) en función de las medidas de los elementos que la componen, de forma que se produzca un escalado de la presión adecuado para el desplazamiento del émbolo (14) del actuador neumático (3) . Como se puede ver en las figuras, el diámetro inferior (D1) del émbolo (11) será mayor que el diámetro superior (D2) del émbolo (11) , de manera que la cámara inferior (8) tiene un diámetro igual al diámetro inferior (D1) del émbolo (11) , y la cámara superior (9) tiene un diámetro igual al diámetro superior (D2) del émbolo (11) . Esta relación también podrá estar definida en función de la relación entre cilindros para manipuladores ingrávidos paralelogramos u horizontales. Según una opción de diseño está previsto que el émbolo (11) de la célula de conversión de presiones (6) esté suspendido dentro de las cámaras (8, 9) mediante resortes (16) con los cuales se puede adaptar de forma complementaria el escalado de presiones, evitando igualmente atascos de dicho émbolo (11) . Según otra realización práctica representada en la figura 2, el conjunto de regulación (2) puede incorporar además un transductor (15) de conversión de la señal de presión en señal eléctrica, la cual puede ser enviada a un sistema de control, no representado, de la planta de trabajo en la que se utilice el manipulador de cargas ingrávido. Dicho transductor (15) se dispone entre a célula de conversión de presiones (6) y la válvula de regulación (7) , en la conducción (13) mediante la que se comunica el conjunto de regulación (2) con el conjunto operativo (1) .
Publicaciones:
ES2964635 (08/04/2024) - A1 Solicitud de patente con informe sobre el estado de la técnica
Eventos:
En fecha 08/09/2022 se realizó Registro Instancia de Solicitud
En fecha 08/09/2022 se realizó Admisión a Trámite
En fecha 08/09/2022 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 13/09/2022 se realizó Superado examen de oficio
En fecha 30/12/2022 se realizó Realizado IET
En fecha 16/01/2023 se realizó 1109P_Comunicación Traslado del IET
En fecha 08/04/2024 se realizó Publicación Solicitud
En fecha 08/04/2024 se realizó Publicación Folleto Solicitud con IET (A1)
Pagos:
08/09/2022 - Pago Tasas IET
+ ES-2964635_A11.- Sistema regulador de presiones para manipuladores de carga ingrávidos, de aplicación en manipuladores de carga ingrávidos que comprenden un conjunto operativo (1) formado por un cilindro actuador neumático (3) , mediante el cual se ejecutan las acciones de manipulación de cargas (4) a manejar, y una célula de carga (5) con un émbolo (12) desde el cual se suspenden las cargas (4) que define una subcámara superior (5.1) y una subcámara inferior (5.2) , estando relacionada dicha célula de carga (5) con el cilindro actuador neumático (3) por medio de un conjunto de regulación (2) , mediante el cual se regula la alimentación a aplicar a través de una válvula de regulación (7) en función de la variación de peso de las cargas (4) , caracterizado por que el conjunto de regulación (2) comprende una célula de conversión de presiones (6) con un cilindro neumático que dispone de un émbolo (11) provisto con dos diámetros diferentes (D1, D2) que definen una cámara inferior (8) disponible en comunicación con la subcámara inferior (5.2) de la célula de carga (5) , y una cámara superior (9) en comunicación con el cilindro actuador neumático (3) . 2.- Sistema regulador de presiones para manipuladores de carga ingrávidos, de acuerdo con la reivindicación 1, caracterizado por que la parte superior de la cámara inferior (8) de la célula de conversión de presiones (6) posee una salida (17) comunicada al exterior. 3.- Sistema regulador de presiones para manipuladores de carga ingrávidos, de acuerdo con las reivindicaciones 1 o 2, caracterizado por que en el conjunto de regulación (2) se incorpora un transductor (15) de conversión de la señal de presión en señal eléctrica, el cual se dispone entre la célula de conversión de presiones (6) y la válvula de regulación (7) . 4.- Manipulador de carga ingrávido que comprende un sistema regulador de presiones según una cualquiera de las reivindicaciones anteriores, que comprende una célula de carga (5) en comunicación con la célula de conversión de presiones (6) , y un cilindro actuador neumático (3) en comunicación con dicha célula de conversión de presión (6) . 5.- Manipulador de carga ingrávido de acuerdo con la reivindicación anterior, caracterizado por que la relación entre diámetros (D1, D2) del émbolo (11) de la célula de conversión de resiones (6) es proporcional a las distintas relaciones de diámetros y/o inclinaciones entre el cilindro actuador neumático (3) y la célula de carga (5) .
Los productos y servicios protegidos por este registro son:
B25J 19/00 - F15B 11/028 - B66C 23/00
Descripciones:
+ ES-2964635_A1 SISTEMA REGULADOR DE PRESIONES PARA MANIPULADORES DE CARGA INGRÁVIDOS Sector de la técnica La presente invención está relacionada con el manejo de cargas pesadas mediante ingravidez, refiriéndose concretamente a un sistema de regulación de presiones para un manipulador de cargas ingrávido, permitiendo este sistema la estabilización del manipulador de carga ingrávido mediante conversión de la presión ejercida por el peso de la carga manejada en una presión adecuada para ser aplicada a un cilindro neumático actuador con el que se ejecuta la manipulación de la carga. Estado de la técnica Para ayudar a los operarios a manejar cargas pesadas suspendidas en el aire sin comprometer su seguridad, la tecnología ha desarrollado máquinas manipuladoras de cargas, denominadas manipuladores ingrávidos, las cuales sostienen a las cargas en el aire, permitiendo trabajar con ellas fácilmente. El estado de la técnica recoge diferentes tipos de manipuladores ingrávidos, unos de los cuales son accionados por aire comprimido y otros mediante una célula electrónica, de modo que, aunque ambas soluciones asisten en el manejo de cargas pesadas, cada solución presenta una serie de inconvenientes. En el caso de manipuladores ingrávidos accionados por aire comprimido, únicamente son capaces de manejar cargas de un mismo peso, suponiendo esto una notable limitación, ya que para manejar cargas de diferentes pesos deben modificarse los elementos de la regulación neumática, con la consiguiente pérdida de tiempo y retrasos en las tareas a realizar. Por otro lado, los manipuladores ingrávidos accionados que funcionan mediante una célula electrónica tienen el inconveniente de que su coste de instalación es muy alto. Se conoce también una solución planteada en el documento ES2235563, que divulga un manipulador de cargas ingrávido, totalmente neumático, el cual se autorregula en función del peso de la carga que se maneja, mejorando así la manipulación en condiciones de ingravidez. Dicho manipulador de cargas ingrávido comprende un conjunto operativo y un conjunto de regulación, estando formado el conjunto operativo por un cilindro neumático actuador, mediante el que se realizan las acciones para el manejo de la carga, la cual se sujeta colgada de una célula de carga, quedando dicha célula de carga relacionada con el cilindro neumático actuador del conjunto operativo a través del conjunto de regulación, el cual comprende una válvula reguladora conectada, por un lado, a la célula de carga y, por otro lado, al cilindro neumático actuador del conjunto operativo, de manera que dicho conjunto de regulación realiza una función por la cual determina el nivel de alimentación neumática al cilindro neumático actuador en función del peso de la carga que se maneja con el manipulador ingrávido. Tanto el cilindro neumático actuador del conjunto operativo como la célula de carga desde la que se suspenden las cargas a manejar, comprenden unos émbolos desde los que se extienden unos vástagos que salen al exterior, de manera que mediante el vástago del cilindro neumático actuador del conjunto operativo se sujeta el manipulador ingrávido a una estructura fija de anclaje, mientras que respecto del vástago de la célula de carga se sujeta la carga a manejar. Esta solución del documento ES2235563 solventa en parte los inconvenientes de las soluciones convencionales anteriormente descritas, pero el hecho de que el diámetro de los émbolos del cilindro neumático actuador del conjunto operativo y de la célula de carga de control sea igual limita mucho las posibilidades de aplicación, ya que dicha solución no puede utilizarse cuando son necesarios manipuladores en los que por cuestiones de diseño se requiera que los émbolos tengan diferentes secciones. Además, esta solución no es válida para otro tipo de manipuladores ingrávidos como los paralelogramos y los horizontales. En los paralelogramos el cilindro de actuación del brazo está dispuesto en diagonal, por lo que las presiones deben tener la proporción adecuada para facilitar el mismo recorrido. Para ello una solución es ajustar el aire que se introduce en el segundo émbolo, con el empleo de una válvula proporcional que calcula el aire a introducir para compensar el peso de la carga, in embargo, esta solución encarece y complica la instalación al tener que electrificarla. Por otra parte, los manipuladores ingrávidos horizontales son empleados cuando hay techos bajos que no permiten el uso del cilindro en vertical, y se basan en que el cilindro de actuación se introduce en el vástago horizontal de la estructura elevando la carga mediante poleas. En este caso, al comprender poleas, la relación de presiones no es igual por lo que al extraer aire de la primera cámara debería introducirse el doble de cantidad en la segunda cámara para mantener la ingravidez. Por los inconvenientes descritos de las soluciones convencionales, se hace necesario el desarrollo de un sistema de regulación de presiones para los manipuladores ingrávidos de accionamiento neumático que no utilice elementos que encarezcan el producto y que permita la aplicación en cualquier tipo de manipuladores ingrávidos. Objeto de la invención Para alcanzar los objetivos propuestos anteriormente, la presente invención propone un sistema de regulación de presiones para manipuladores de carga ingrávidos, con el cual se reducen considerablemente los costes de fabricación al utilizar elementos normalizados, no customizados, pudiendo además ser utilizado este sistema de regulación en todo tipo de manipuladores ingrávidos de accionamiento neumático: verticales, horizontales, paralelogramos. Dicho sistema de regulación de presiones objeto de la invención comprende una célula de conversión de presiones, la cual se dispone entre la célula de carga de la que se cuelgan las cargas a manejar y la válvula reguladora desde la que se alimenta el cilindro neumático actuador del conjunto operativo del manipulador ingrávido, de manera que en dicha célula de conversión de presiones se ajustan las presiones para que a la válvula reguladora le llegue la presión necesaria, adaptada a la carga que se maneja, para realizar el movimiento de manipulación. La célula de conversión de presiones comprende dos cámaras, una inferior y otra superior, de diferentes tamaños y separadas entre sí por un émbolo diseñado con dos diámetros distintos, de manera que merced a la relación de dichos diámetros del mencionado émbolo se realiza un escalado ascendente/descendente entre la presión de salida de la célula de carga y la resión de entrada al cilindro neumático en función de la relación existente entre ambos. De este modo la válvula reguladora realiza el ajuste necesario para llevar la presión necesaria al cilindro neumático actuador del conjunto operativo, el cual se adapta así a las variaciones del peso de la carga que se maneja con el manipulador ingrávido, ajustándose la presión en función de la relación entre las distintas características de diseño entre el cilindro actuador neumático y el cilindro de la célula de carga. Esta configuración facilita una regulación de presiones por ejemplo en instalaciones en las que por requerimientos de diseño sean diferentes los diámetros de émbolo del cilindro actuador neumático con respecto del de la célula de carga, de forma que la relación entre diámetros del émbolo de la célula de conversión de presiones es proporcional a la relación entre diámetros de los émbolos del cilindro actuador y la célula de carga. Esta situación se puede dar por ejemplo cuando al integrarse el cilindro actuador en el brazo del manipulador ingrávido es necesario reducir sus dimensiones. También es especialmente indicada dicha configuración para manipuladores de carga ingrávidos paralelogramos en los que el cilindro actuador se dispone en posición diagonal, de forma que la relación entre diámetros del émbolo de la célula de conversión de presiones es proporcional al ángulo entre ambos cilindros. Asimismo, esta configuración podría ser empleada en manipuladores de carga ingrávidos horizontales para el equilibrado de presiones. Así, con este sistema de regulación de presiones objeto de la invención se evita la necesidad de complejas conexiones y el uso de numerosas válvulas actuables en la realización del manipulador de carga ingrávido de aplicación, convirtiéndose en un diseño sencillo de implementar. Por otro lado, con la incorporación de la célula de conversión de presiones se consigue un coste de fabricación muy inferior a la fabricación con diferentes células de carga para cada tipo de cilindro neumático actuador en el conjunto operativo del manipulador de carga ingrávido, además de que la implementación y funcionalidad son muy sencillas, ya que únicamente se deben cuidar las proporciones entre los dos diámetros del émbolo de dicha célula de conversión de presiones. Además, el sistema regulador de presiones objeto de la invención tiene la ventaja de que se puede incorporar a cualquier tipo de manipuladores ingrávidos, como los de tipo horizontal, paralelogramos, etc., lo que aumenta el campo de utilidad y la flexibilidad en el mercado. Será también objeto de la invención un manipulador de carga ingrávido que comprenda un sistema regulador de presiones como el mencionado. Todo lo anteriormente descrito evidencia que el sistema de regulación de presiones objeto de la invención ofrece características ventajosas respecto de las soluciones convencionales de su misma aplicación, confiriéndole un carácter preferente en la manipulación ingrávida de cargas, para lo cual ha sido diseñado. Descripción de las figuras La figura 1 muestra un esquema del conjunto funcional de un manipulador que comprende el sistema de regulador de presiones objeto de la invención. La figura 2 es una vista esquemática como la anterior de otro ejemplo de realización práctica. Descripción detallada de la invención La presente invención se refiere a un sistema de regulación de presiones que se aplica en manipuladores de cargas ingrávidos que comprenden una parte actuadora con un conjunto operativo (1) formado por un cilindro actuador neumático (3) que actúa en función de una carga (4) a manejar, y una parte de control con una célula de carga (5) desde la cual se suspenden las cargas (4) , estableciéndose una relación entre ambas partes mediante un conjunto de regulación (2) por medio de una conexión (13) desde la célula de carga (5) hasta una válvula de regulación (7) que ajusta la presión a aplicar en dicho cilindro actuador neumático (3) en función de la variación de presión creada en la célula de carga (5) por la variación de peso de la carga (4) suspendida de ella y que posibilita su manipulación en condiciones de ingravidez. Como se puede ver en las figuras 1 y 2 el sistema regulador de presiones objeto de la invención es aplicable en reguladores de carga ingrávidos en los que el cilindro actuador neumático (3) del conjunto operativo (1) y el cilindro de la célula de carga (5) son de diferentes iámetros. Esta circunstancia se da cuando por razones de diseño es necesario disminuir el tamaño por ejemplo del cilindro actuador neumático (3) para su emplazamiento en el brazo del manipulador ingrávido. Según la realización práctica de la invención para contrarrestar esta diferencia de diámetro, el conjunto de regulación (2) comprende una célula de conversión de presiones (6) , la cual se dispone en comunicación con la célula de carga (5) . Preferentemente, dicha célula de conversión de presiones (6) se configura incorporando un mecanizado en la célula de carga (5) del manipulador ingrávido que deja pasar la presión que se genera en una subcámara inferior (5.2) de la célula de carga (5) a la célula de conversión de presiones (6) , comunicando por medio de la conexión (13) la célula de conversión de presiones (6) con la válvula de regulación (7) . Así, mediante dicha célula de conversión de presiones (6) se reajustan los diferentes valores de la presión que se originan entre el cilindro actuador (3) y la célula de carga (5) función de la diferencia de diámetros de los cilindros de la célula de carga (5) y el cilindro actuador (3) . Esta regulación permite pilotar la válvula de regulación (7) para aplicar al cilindro actuador neumático (3) del conjunto operativo (1) una presión adecuada en función del peso de la carga (4) que se maneja y de sus variaciones. Para realizar dicha regulación, la célula de conversión de presiones (6) comprende una cámara inferior (8) , y una cámara superior (10) , estando definidas dichas cámaras (8) y (10) por un émbolo (11) . Este émbolo (11) está constituido por dos diámetros (D1 y D2) diferentes, de tal modo que la relación entre dichos diámetros (D1 y D2) del émbolo (11) determina en la célula (6) una conversión de la presión recibida en la cámara inferior (8) desde la célula de carga (5) , adaptando dicha presión, a una presión en la cámara superior (10) adecuada para la alimentación del cilindro actuador neumático (3) del conjunto operativo (1) en función de la relación entre las diferentes presiones entre la célula (6) y el cilindro actuador (3) , de forma que a través de la válvula de regulación (7) se regula la presión a introducir en el cilindro actuador en función de las variaciones de peso de la carga (4) . La célula de carga (5) está formada, en su caso, por un cilindro neumático provisto con un émbolo (12) desde el que se extiende un vástago (12.1) desde el que se suspenden las cargas (4) a manejar, de tal forma que el peso de la carga (4) provoca el descenso del émbolo (12) dentro de la célula de carga (5) , generando una presión en una subcámara inferior (5.2) . Al estar la célula de conversión de presiones (6) en comunicación directa con la célula de carga (5) , dicha presión se traslada a la cámara inferior (8) de la célula de conversión de presiones (6) . Esta presión hace ascender al émbolo (11) de doble diámetro (D1 y D2) de la célula de conversión de presiones (6) , provocando en la cámara superior (10) de dicha célula e conversión de presiones (6) una presión diferente a la existente en la cámara inferior (8) , en base a la relación entre los diámetros (D1 y D2) del émbolo (11) , siendo esta relación proporcional a la relación existente entre diámetros del cilindro actuador (3) y la célula de carga (5) .De forma preferente, la parte superior de la cámara inferior (8) queda comunicada al exterior por una salida (17) , para permitir el movimiento del émbolo (11) , de igual manera que en el cilindro actuador neumático (3) y en la célula de carga (5) existen salidas de comunicación al exterior (no representadas) para permitir el movimiento de los émbolos (14, 12) . Una vez así, la nueva presión que se obtiene en la cámara superior (9) de la célula de conversión de presiones (6) , es transmitida a la válvula de regulación (7) , la cual envía la presión necesaria para alimentar al cilindro actuador neumático (3) del conjunto operativo (1) , adaptando con ello el funcionamiento del manipulador ingrávido en función de las variaciones de presión que se producen en la célula de carga (5) por efecto del peso de las cargas (4) que se manejan. Para dicha regulación, en el diseño de la instalación como se ha mencionado anteriormente, se establece la relación entre los diámetros (D1, D2) en función de las medidas de los elementos que la componen, de forma que se produzca un escalado de la presión adecuado para el desplazamiento del émbolo (14) del actuador neumático (3) . Como se puede ver en las figuras, el diámetro inferior (D1) del émbolo (11) será mayor que el diámetro superior (D2) del émbolo (11) , de manera que la cámara inferior (8) tiene un diámetro igual al diámetro inferior (D1) del émbolo (11) , y la cámara superior (9) tiene un diámetro igual al diámetro superior (D2) del émbolo (11) . Esta relación también podrá estar definida en función de la relación entre cilindros para manipuladores ingrávidos paralelogramos u horizontales. Según una opción de diseño está previsto que el émbolo (11) de la célula de conversión de presiones (6) esté suspendido dentro de las cámaras (8, 9) mediante resortes (16) con los cuales se puede adaptar de forma complementaria el escalado de presiones, evitando igualmente atascos de dicho émbolo (11) . Según otra realización práctica representada en la figura 2, el conjunto de regulación (2) puede incorporar además un transductor (15) de conversión de la señal de presión en señal eléctrica, la cual puede ser enviada a un sistema de control, no representado, de la planta de trabajo en la que se utilice el manipulador de cargas ingrávido. Dicho transductor (15) se dispone entre a célula de conversión de presiones (6) y la válvula de regulación (7) , en la conducción (13) mediante la que se comunica el conjunto de regulación (2) con el conjunto operativo (1) .
Publicaciones:
ES2964635 (08/04/2024) - A1 Solicitud de patente con informe sobre el estado de la técnica
Eventos:
En fecha 08/09/2022 se realizó Registro Instancia de Solicitud
En fecha 08/09/2022 se realizó Admisión a Trámite
En fecha 08/09/2022 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 13/09/2022 se realizó Superado examen de oficio
En fecha 30/12/2022 se realizó Realizado IET
En fecha 16/01/2023 se realizó 1109P_Comunicación Traslado del IET
En fecha 08/04/2024 se realizó Publicación Solicitud
En fecha 08/04/2024 se realizó Publicación Folleto Solicitud con IET (A1)
Pagos:
08/09/2022 - Pago Tasas IET
Fuente de la información
Parte de la información aquí publicada es pública puesto que ha sido obtenida de la Oficina de Propiedad Industrial de los diferentes países el 27/04/2024 y por lo tanto puede ser que la información no esté actualizada.Parte de la información aquí mostrada ha sido calculada por nuestro sistema informático y puede no ser veraz.
Privacidad
Si considera que al información aquí publicada afecta a su privacidad y desea que eliminemos la información aquí publicada envíe un email a info@patentes-y-marcas.com o rellene el formulario que encontrará aquí.Información sobre el registro de patente nacional por SISTEMA REGULADOR DE PRESIONES PARA MANIPULADORES DE CARGA INGRÁVIDOS con el número P202230797
El registro de patente nacional por SISTEMA REGULADOR DE PRESIONES PARA MANIPULADORES DE CARGA INGRÁVIDOS con el número P202230797 fue solicitada el 08/09/2022. Se trata de un registro en España por lo que este registro no ofrece protección en el resto de países. El registro SISTEMA REGULADOR DE PRESIONES PARA MANIPULADORES DE CARGA INGRÁVIDOS con el número P202230797 fue solicitada por TALLERES J. ANGEL BACAICOA, S.L. mediante los servicios del agente Mikel Veiga Serrano. El registro [modality] por SISTEMA REGULADOR DE PRESIONES PARA MANIPULADORES DE CARGA INGRÁVIDOS con el número P202230797 está clasificado como B25J 19/00,F15B 11/028,B66C 23/00 según la clasificación internacional de patentes.
Otras invenciones solicitadas por TALLERES J. ANGEL BACAICOA, S.L.
Es posible conocer todas las invenciones solicitadas por TALLERES J. ANGEL BACAICOA, S.L. entre las que se encuentra el registro de patente nacional por SISTEMA REGULADOR DE PRESIONES PARA MANIPULADORES DE CARGA INGRÁVIDOS con el número P202230797. Si se desean conocer más invenciones solicitadas por TALLERES J. ANGEL BACAICOA, S.L. clicar aquí.Otras invenciones solicitadas en la clasificación internacional de patentes B25J 19/00,F15B 11/028,B66C 23/00.
Es posible conocer invenciones similares al campo de la técnica se refiere. El registro de patente nacional por SISTEMA REGULADOR DE PRESIONES PARA MANIPULADORES DE CARGA INGRÁVIDOS con el número P202230797 está clasificado con la clasificación B25J 19/00,F15B 11/028,B66C 23/00 por lo que si se desea conocer más registros con la clasificación B25J 19/00,F15B 11/028,B66C 23/00 clicar aquí.Otras invenciones solicitadas a través del representante MIKEL VEIGA SERRANO
Es posible conocer todas las invenciones solicitadas a través del agente MIKEL VEIGA SERRANO entre las que se encuentra el registro patente nacional por SISTEMA REGULADOR DE PRESIONES PARA MANIPULADORES DE CARGA INGRÁVIDOS con el número P202230797. Si se desean conocer más invenciones solicitadas a través del agente MIKEL VEIGA SERRANO clicar aquí.Patentes en España
Es posible conocer todas las invenciones publicadas en España entre las que se encuentra el registro patente nacional por SISTEMA REGULADOR DE PRESIONES PARA MANIPULADORES DE CARGA INGRÁVIDOS. Nuestro portal www.patentes-y-marcas.com ofrece acceso a las publicaciones de patentes en España. Conocer las patentes registradas en un país es importante para saber las posibilidades de fabricar, vender o explotar una invención en España.Patentes registradas en la clase B
Es posible conocer todas las patentes registradas en la clase B (TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTE ) entre las que se encuentra la patente SISTEMA REGULADOR DE PRESIONES PARA MANIPULADORES DE CARGA INGRÁVIDOS con el número P202230797. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase B25
Es posible conocer todas las patentes registradas en la clase B25 (HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTORPORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE) entre las que se encuentra la patente SISTEMA REGULADOR DE PRESIONES PARA MANIPULADORES DE CARGA INGRÁVIDOS con el número P202230797. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase B25J
Es posible conocer todas las patentes registradas en la clase B25J (MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS) entre las que se encuentra la patente SISTEMA REGULADOR DE PRESIONES PARA MANIPULADORES DE CARGA INGRÁVIDOS con el número P202230797. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase F
Es posible conocer todas las patentes registradas en la clase F ( MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA) entre las que se encuentra la patente SISTEMA REGULADOR DE PRESIONES PARA MANIPULADORES DE CARGA INGRÁVIDOS con el número P202230797. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase F15
Es posible conocer todas las patentes registradas en la clase F15 (DISPOSITIVOS ACCIONADORES POR PRESION DE UN FLUIDO; HIDRAULICA O NEUMATICA EN GENERAL) entre las que se encuentra la patente SISTEMA REGULADOR DE PRESIONES PARA MANIPULADORES DE CARGA INGRÁVIDOS con el número P202230797. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase F15B
Es posible conocer todas las patentes registradas en la clase F15B (SISTEMAS QUE FUNCIONAN POR MEDIO DE FLUIDOS EN GENERAL; DISPOSITIVOS ACCIONADORES POR PRESION DE UN ) entre las que se encuentra la patente SISTEMA REGULADOR DE PRESIONES PARA MANIPULADORES DE CARGA INGRÁVIDOS con el número P202230797. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase B66
Es posible conocer todas las patentes registradas en la clase B66 (ELEVACION; LEVANTAMIENTO; REMOLCADO) entre las que se encuentra la patente SISTEMA REGULADOR DE PRESIONES PARA MANIPULADORES DE CARGA INGRÁVIDOS con el número P202230797. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase B66C
Es posible conocer todas las patentes registradas en la clase B66C (GRUAS Y PUENTES-GRUA; ELEMENTOS O DISPOSITIVOS DE TOMA DE CARGA PARA GRUAS, PUENTES GRUA, CABRESTANT) entre las que se encuentra la patente SISTEMA REGULADOR DE PRESIONES PARA MANIPULADORES DE CARGA INGRÁVIDOS con el número P202230797. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.
¿Tienes alguna duda?
Escribe tu consulta y te responderemos rápida y gratuitamente.

Otras patentes similares
 P202230798
P202230798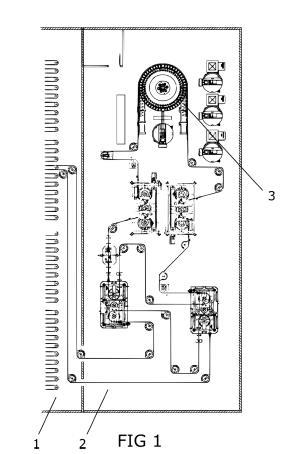 P202230799
P202230799Profesionales Recomendados
Barcelona
933182440
España
933182440
España

Barcelona
+34 93 362 16 97
España
+34 93 362 16 97
España

Barcelona
932 593 600
España
932 593 600
España







