


- Home /
- Publicaciones de patentes /
- SISTEMA PARA ASISTIR A UNA GRÚA EN EL MOVIMIENTO DE UNA TAPA Y GRÚA QUE COMPRENDE DICHO SISTEMA
Patente nacional por "SISTEMA PARA ASISTIR A UNA GRÚA EN EL MOVIMIENTO DE UNA TAPA Y GRÚA QUE COMPRENDE DICHO SISTEMA"
Este registro ha sido solicitado por
SIBRE BRAKES SPAIN, S.L.
a través del representanteISABEL CARVAJAL Y URQUIJO
Contacto
- Estado: Solicitud retirada
- País:
- España
- Fecha solicitud:
- 11/04/2022
- Número solicitud:
-
P202230329
- Número publicación:
-
ES2954312
- Fecha de concesión:
-
- Inventores:
-
Persona física
- Datos del titular:
-
SIBRE BRAKES SPAIN, S.L.
- Datos del representante:
-
Isabel Carvajal y Urquijo
- Clasificación Internacional de Patentes:
- B66C 13/46,B66C 13/48,B66C 13/00,G01B 11/00,G01B 11/24
- Clasificación Internacional de Patentes de la publicación:
- B66C 13/46,B66C 13/48,B66C 13/00,G01B 11/00,G01B 11/24
- Fecha de vencimiento:
Quiero registrar una patente

Reivindicaciones:
+ ES-2954312_A11. Sistema (10) para asistir a una grúa (20) en el movimiento de una tapa (42) , donde el sistema (10) comprende: - una cámara (16) configurada para establecer un campo de visión y captar una pluralidad de imágenes de un área de operación de la grúa (20) ; - una unidad de procesamiento (12) de las imágenes captadas por la cámara, que realiza una serie de operaciones para, en tiempo real, identificar una tapa (42) de una bodega en un barco (40) mediante un modelo de red neuronal de inteligencia artificial; - una unidad de comunicaciones (14) configurada para intercambiar información con un panel de mando (22) asociado a la grúa (20) , donde la información intercambiada comprende información sobre la identificación de una tapa. 2. Sistema (10) para asistir a una grúa (20) según la reivindicación 1, donde la unidad de procesamiento (12) está configurada para realizar las siguientes operaciones: - comprobar si hay un error en la imagen captada por la cámara (16) ; - realizar un pre-procesamiento de la imagen captada; - extraer una pluralidad de características de la imagen captada; - clasificar la imagen captada en función de las características extraídas; - comparar la imagen clasificada con una referencia; - asignar una etiqueta a la imagen como "tapa" o como "no tapa"; - comunicar la etiqueta a un panel de mando (22) . 3. Sistema (10) para asistir a una grúa (20) según la reivindicación 2, donde el pre procesamiento comprende al menos una de las siguientes operaciones: decodificar, descomprimir la imagen, ajustar de contraste, luminosidad, balance de blancos, ajustar la perspectiva, cambiar el tamaño de escala, o una combinación cualquiera de las anteriores operaciones. 4. Sistema (10) para asistir a una grúa (20) según la reivindicación 2 o 3, donde el panel de mando (22) muestra un mensaje de aviso de identificación de tapa para un operario de grúa. 5. Sistema (10) para asistir a una grúa (20) según la reivindicación 4, donde el panel de mando (22) solicita en una interfaz, confirmación al operario de la grúa, para continuar. 6. Sistema (10) para asistir a una grúa (20) según la reivindicación 4, donde el panel de mando (22) permite continuar de forma automática. 7. Sistema (10) para asistir a una grúa (20) según la reivindicación 5 o 6, donde el panel de mando (22) impone una limitación de movimientos en la grúa, donde la limitación se refiere a un valor máximo asociado al menos uno de los siguientes parámetros: - velocidad, - aceleración, - desplazamiento horizontal - desplazamiento vertical. 8. Sistema (10) para asistir a una grúa (20) según una cualquiera de las reivindicaciones 2 a 7, donde las características extraídas comprenden tamaño de la tapa y geometría de la tapa. 9. Grúa (20) que comprende el sistema según una cualquiera de las reivindicaciones 1 a 8.
Los productos y servicios protegidos por este registro son:
B66C 13/46 - B66C 13/48 - B66C 13/00 - G01B 11/00 - G01B 11/24
Descripciones:
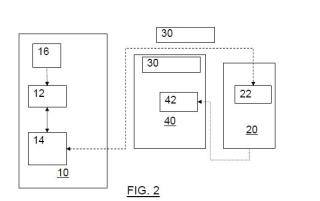
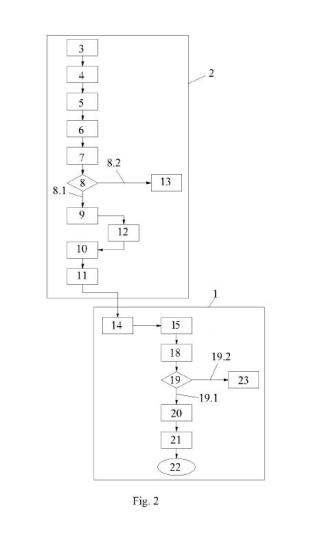
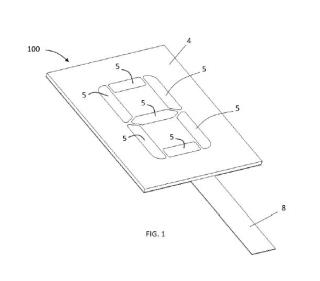
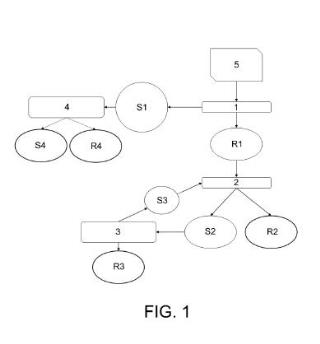
+ ES-2954312_A1 SISTEMA PARA ASISTIR A UNA GRÚA EN EL MOVIMIENTO DE UNA TAPA Y GRÚA QUE COMPRENDE DICHO SISTEMA CAMPO DE LA INVENCIÓN La presente invención pertenece al campo de la seguridad y el control para operar una grúa para carga y descarga de contenedores. Más concretamente, se refiere a un sistema de asistencia para controlar una grúa en trabajos de descarga desde, o de carga en un buque. La invención es aplicable para las maniobras de retirada o colocación de una tapa de la bodega de una embarcación. La invención tiene utilidad directa en el sector logístico, en particular en el ámbito portuario. ANTECEDENTES DE LA INVENCIÓN Una grúa para contenedores es una infraestructura de grandes dimensiones que sirve para la carga y descarga de mercancías en terminales de contenedores de puertos, estaciones ferroviarias, etc. En un barco portacontenedores, se cargan (o descargan) contenedores en (de) una zona de almacenaje del barco denominada bodega. Para ello hay que asegurar un acceso adecuado a la bodega que viene dado por una tapa de escotilla, también denominada simplemente tapa. También estas grúas cargan (o descargan) contenedores en (de) el muelle del puerto. En la actualidad la mayoría de las propuestas existentes para manejar una grúa para contenedores se basan en una operativa meramente manual con las desventajas que conlleva ante la posibilidad de fallos humanos. Una forma común de mejorar la seguridad es que las grúas implementen varios modos de operación que imponen limitaciones en los movimientos que puede realizarse desde el control de mando de la grúa (por ejemplo, la velocidad) . Entre los modos de operación está el modo "tapa", el modo "jaula" o, el más frecuente y, por eso normalmente establecido por defecto, el modo "contenedor". Estos modos de operación deben ser activados manualmente por el propio operario de la grúa. También existen algunas propuestas automáticas o semi-automáticas que se apoyan en sensores de proximidad situados en la cabeza de enganche de la grúa como asistentes en el manejo de la grúa para contenedores para ayudar al operario. Sin embargo, los sensores de proximidad suelen ser poco fiables y requerir elementos adicionales de identificación. Habitualmente, precisan implementar técnicas complejas debido a la movilidad de la cabeza de enganche (p.e. un cabezal de poleas) respecto a la cabina de la grúa. Además, la productividad se puede ver afectada porque se requiere parar una grúa para la reparación o mantenimiento de los sensores. A la vista de todo lo mencionado, sería deseable una solución que remedie los inconvenientes existentes, que facilite una correcta operativa y ayude a una efectiva gestión logística. DESCRIPCIÓN DE LA INVENCIÓN Es objeto de la invención un sistema según la reivindicación independiente que se concibe a la vista de los problemas identificados. Realizaciones particulares de la invención se definen en las reivindicaciones dependientes. De acuerdo con diversas realizaciones de la presente invención, se propone un sistema de asistencia para mejorar la productividad en la carga/descarga de contenedores en una embarcación. En particular, el sistema ayuda a controlar las maniobras sobre la tapa de escotilla (en adelante, tapa) . Una situación es cuando para poder coger un contenedor se ha de acceder a la bodega retirando una tapa. También, otra situación es cuando, para finalizar, se ha de colocar la tapa a la bodega. La invención emplea una cámara con campo de visión sobre el área de operación de la grúa de carga-descarga que opera con el contenedor o la tapa y, en general, con los elementos de carga/descarga; una unidad de procesamiento que implementa inteligencia artificial para tratar las imágenes captadas por la cámara, y que está entrenada previamente para, en tiempo real, identificar una tapa de acceso a una bodega, distinguiendo dicha tapa frente a otras posibles cargas existentes en un buque portacontenedores (en adelante, buque) o en un muelle; una unidad de comunicaciones, que se encarga de intercambiar mensajes con un panel de mando asociado a la grúa, bien directamente, bien usando una pasarela si hay incompatibilidad entre protocolos. De manera general, la presente invención aporta diversas ventajas. Mediante una correcta detección de la tapa en una embarcación, habitualmente, un buque portacontenedores, o bien en un muelle, se mejora la seguridad bien para retirarla o para colocarla. También, se incrementa la productividad de los terminales en un puerto atendidos por una grúa que implemente esta invención. Por ejemplo, ayuda a predecir el tiempo estimado de finalización (ETC, por sus siglas en inglés) . Volviendo al ejemplo de una tapa que descansa en una posición de origen, sobre un muelle y ha de colocarse en una posición de destino, cerrando una bodega de un buque. La grúa debe aprehender la tapa sin que se suelte ni golpee con otros elementos para colocarla en una posición de destino, en el acceso a la bodega del buque. Por tanto, mover una tapa no está exento de problemas y riesgos. Generalmente, requiere mucha mayor precisión del operador en las maniobras, puesto que, entre otras razones, debe ser extraída o devuelta en un entorno complejo rodeado de obstáculos. Igualmente, sucede cuando las maniobras son para su retirada de la bodega (posición de origen) del buque y su colocación en una zona asignada en un muelle (posición de destino) . Un accidente en estas circunstancias provoca costosas pérdidas. Por esta razón, la velocidad, la aceleración, el desplazamiento horizontal (translación) , y/o el desplazamiento vertical (elevación) deben ser controlados en función del tipo de carga con el que trabaja una grúa. No es deseable que sea solamente el operario el único encargado de identificar el tipo de carga y las maniobras asociadas permitidas. La invención permite implementar técnicas para ayudar en estas tareas. BREVE DESCRIPCIÓN DE LAS FIGURAS Las realizaciones de la presente invención se describen, solo a modo de ejemplo, en los dibujos adjuntos en los que los elementos similares están numerados de la misma manera. FIGS. 1A-1B son esquemas de ejemplos de funcionamiento con diferentes grúas. FIG. 2 es el esquema de un diagrama de bloques de un sistema. FIG. 3 es el esquema de un diagrama de flujo según un algoritmo de identificación. Glosario de referencias numéricas: 1 Cabina. 2 Pluma. 3 Contrapluma. 6 Sala de máquinas. 7 Rieles. 8 Cabezal de poleas. 10 Sistema para asistir a una grúa. 16 Cámara. 12 Unidad de procesamiento. 14 Unidad de comunicaciones. 20 Grúa para contenedores. 30 Contenedor. 31 Paso de captura de una imagen. 32 Paso de comprobación de error en la captura. 33 Paso de pre-procesamiento. 34 Paso de extracción de características. 35 Paso de clasificación. 36 Paso de comparación. 37 Paso de asignación de etiqueta "tapa". 38 Paso de asignación de etiqueta "no tapa". 39 Paso de comunicación con panel de mando 42 Tapa. 40 Barco. 44 Muelle. 46 Bodega. DESCRIPCIÓN DE MODOS DE REALIZACIÓN Con referencia a las figuras anteriores, sin carácter limitativo, se presentan diversas realizaciones de la invención para una mejor comprensión. La FIG. 1A es el esquema de un ejemplo de funcionamiento con una grúa 20 de tipo Quay que alza un contenedor 30 de un muelle 44 comandado por un operador desde una cabina 1 rotatoria unida con la pluma 2. Este tipo de grúa 20 permite implantar el sistema para asistir a una grúa objeto de la presente invención. La FIG. 1B es el esquema de un ejemplo de funcionamiento con una grúa 20 de tipo Gantr y que también permite implantar el sistema para asistir a una grúa objeto de la presente invención. Este tipo de grúas 20 tiene un bastidor de grandes dimensiones que sostiene la luma 2 a un lado, y la contrapluma 3 con la sala de máquinas 6 al otro. La grúa 20 es manejada por un operador desde una cabina 1 móvil ubicada en la pluma 2. La cabina 1 se desplaza por la pluma 2 junto con el cabezal de poleas 8 encargado de aprehender la carga. Para el movimiento transversal de la grúa 20 en un muelle 44, la grúa 20 puede montarse sobre rieles 7 o usar neumáticos. Durante los trabajos de un operario de una grúa 20, hay que realizar con relativa frecuencia maniobras con una tapa 42 para acceder a los contenedores 30 de la bodega 46. Una correcta identificación de la tapa 42 respalda la operativa de la grúa 20 y permite una manipulación segura. Se puede configurar la grúa 20 para reducir su velocidad, y/o aceleración, rango de desplazamiento (translación y/o elevación) , lo que previene posibles golpes y rotura de elementos del buque o del material transportado. También ayuda a verificar el correcto progreso de carga o descarga de contenedores 30 de un barco 40. Todo esto se debe a que la tapa 42 es un tipo de carga especial. Dadas las características (p.e. geometría y tamaño) de las tapas 42, requieren ser manejadas según un proceso específico y diferente de los contenedores u otras cargas con limitaciones en las características del movimiento. Es también un elemento importante puesto que da acceso a la bodega 46 del buque 40 donde se guardan los contenedores 30. En operaciones de carga del buque 40 los contenedores 30 están emplazados en el muelle 44 y deben llevarse al interior de la bodega 46. En operaciones de descarga del buque 40, se sacan contenedores 30 de la bodega 46 y se depositan en el muelle 44 el presente sistema monitoriza que se apliquen maniobras controladamente según el tipo de carga. La FIG.2 muestra un sistema 10 para asistir a una grúa 20 para contenedores 30. Una cámara 16 capta imágenes de un área de operación de la grúa 20. Las imágenes son enviadas a una unidad de procesamiento 12. La unidad de procesamiento 12 opera con estas imágenes para, en tiempo real, identificar una tapa 42 de una bodega en un barco 40. Para ello usa un modelo de red neuronal de inteligencia artificial que se explicará más adelante. Una unidad de comunicaciones 14 intercambia mensajes (en línea discontinua) con un panel de mando 22 donde un operario controla la grúa 20. Los mensajes pueden ser de diferentes tipos. Por ejemplo, un mensaje de aviso de identificación de tapa. El panel de mando 22 recibe este mensaje y puede reaccionar de diferentes maneras según se haya preestablecido. Por ejemplo, pidiendo a través de una interfaz, confirmación al operario de la grúa, para continuar. Por ejemplo, activando automáticamente el modo "tapa" que limita la magnitud de ciertos movimientos en la grúa. La FIG. 3 es un diagrama de flujo de la información captada por la cámara y las principales operaciones de la unidad de procesamiento que se realizan ella. Se describen los principales pasos del proceso de identificación de una carga, realizado en la unidad de procesamiento. El primer paso 31 es la captura de una imagen del área de interés por medio de la cámara. Esta imagen, que opcionalmente será codificada y/o comprimida, se transfiere a la unidad de procesamiento a través de algún medio de comunicaciones como puede ser una red IP local (cableada o inalámbrica) . El segundo paso 32 es la comprobación de error en la captura por si durante el paso de captura de la imagen se detectara un error, por ejemplo, de comunicaciones con la cámara, el análisis no podría realizarse y se emitiría un mensaje de error que sería enviado al panel de mando. En ausencia de problemas tras la comprobación de error 32, se procede con el tercer paso de pre-procesamiento 33 realizado por la unidad de procesamiento para su posterior análisis. Este pre-procesamiento 33 decodifica y/o descomprime la imagen si es necesario, hace un ajuste de canales (contraste, luminosidad, balance de blancos, etc.) y un ajuste de perspectiva (corrección de lente) si son necesarios. Adicionalmente, realiza un escalado para adaptar el tamaño de la imagen al tamaño adecuado según el análisis. El siguiente y cuarto paso es de extracción de características 34 de la imagen. Mediante una red neuronal previamente entrenada para este fin, se extrae un conjunto de características que resumen la información relevante de la imagen. El quinto paso es de clasificación 35. El conjunto de características previamente obtenido se pasa por un clasificador, también entrenado para esta tarea, cuya salida será una probabilidad asignada a que la imagen corresponda con estar manipulando una "tapa". El sexto paso es de comparación 36. El valor de probabilidad se evalúa mediante un comparador para en un séptimo paso de asignación de una etiqueta definitiva de "tapa" 37, o alternativamente, en un octavo paso de asignación de una etiqueta de "no tapa" 38 a esta imagen. Este paso de comparación 36 puede ser mediante un simple umbral estático o algún método recursivo con memoria de los valores anteriormente procesados. Esta etiqueta obtenida para la imagen mediante el proceso de análisis es enviada al panel de mando de la grúa mediante un método de comunicaciones como puede ser una red IP local (cableada o inalámbrica) . Una vez recibido, la grúa pasa a trabajar en modo tapa con limitaciones en la velocidad y desplazamiento de las maniobras. Si bien diversos aspectos de la invención han sido descritos con referencia a realizaciones concretas, se debe entender que pueden realizarse cambios y sustituirse elementos en tales realizaciones por otros equivalentes sin apartarse del alcance de la invención que definen las reivindicaciones adjuntas.
Publicaciones:
ES2954312 (21/11/2023) - A1 Solicitud de patente con informe sobre el estado de la técnica
Eventos:
En fecha 11/04/2022 se realizó Registro Instancia de Solicitud
En fecha 12/04/2022 se realizó Admisión a Trámite
En fecha 12/04/2022 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 13/04/2022 se realizó Superado examen de oficio
En fecha 28/02/2023 se realizó Realizado IET
En fecha 01/03/2023 se realizó 1109P_Comunicación Traslado del IET
En fecha 21/11/2023 se realizó Publicación Solicitud
En fecha 21/11/2023 se realizó Publicación Folleto Solicitud con IET (A1)
En fecha 07/03/2024 se realizó Validación petición y/o pago de examen sustantivo no conforme
En fecha 07/03/2024 se realizó Retirada
En fecha 07/03/2024 se realizó 1108P_Notificación retirada solicitud por no petición y/o pago de examen sustantivo
En fecha 13/03/2024 se realizó Publicación retirada solicitud por no petición y/o pago de examen sustantivo
Pagos:
11/04/2022 - Pago Tasas IET
+ ES-2954312_A11. Sistema (10) para asistir a una grúa (20) en el movimiento de una tapa (42) , donde el sistema (10) comprende: - una cámara (16) configurada para establecer un campo de visión y captar una pluralidad de imágenes de un área de operación de la grúa (20) ; - una unidad de procesamiento (12) de las imágenes captadas por la cámara, que realiza una serie de operaciones para, en tiempo real, identificar una tapa (42) de una bodega en un barco (40) mediante un modelo de red neuronal de inteligencia artificial; - una unidad de comunicaciones (14) configurada para intercambiar información con un panel de mando (22) asociado a la grúa (20) , donde la información intercambiada comprende información sobre la identificación de una tapa. 2. Sistema (10) para asistir a una grúa (20) según la reivindicación 1, donde la unidad de procesamiento (12) está configurada para realizar las siguientes operaciones: - comprobar si hay un error en la imagen captada por la cámara (16) ; - realizar un pre-procesamiento de la imagen captada; - extraer una pluralidad de características de la imagen captada; - clasificar la imagen captada en función de las características extraídas; - comparar la imagen clasificada con una referencia; - asignar una etiqueta a la imagen como "tapa" o como "no tapa"; - comunicar la etiqueta a un panel de mando (22) . 3. Sistema (10) para asistir a una grúa (20) según la reivindicación 2, donde el pre procesamiento comprende al menos una de las siguientes operaciones: decodificar, descomprimir la imagen, ajustar de contraste, luminosidad, balance de blancos, ajustar la perspectiva, cambiar el tamaño de escala, o una combinación cualquiera de las anteriores operaciones. 4. Sistema (10) para asistir a una grúa (20) según la reivindicación 2 o 3, donde el panel de mando (22) muestra un mensaje de aviso de identificación de tapa para un operario de grúa. 5. Sistema (10) para asistir a una grúa (20) según la reivindicación 4, donde el panel de mando (22) solicita en una interfaz, confirmación al operario de la grúa, para continuar. 6. Sistema (10) para asistir a una grúa (20) según la reivindicación 4, donde el panel de mando (22) permite continuar de forma automática. 7. Sistema (10) para asistir a una grúa (20) según la reivindicación 5 o 6, donde el panel de mando (22) impone una limitación de movimientos en la grúa, donde la limitación se refiere a un valor máximo asociado al menos uno de los siguientes parámetros: - velocidad, - aceleración, - desplazamiento horizontal - desplazamiento vertical. 8. Sistema (10) para asistir a una grúa (20) según una cualquiera de las reivindicaciones 2 a 7, donde las características extraídas comprenden tamaño de la tapa y geometría de la tapa. 9. Grúa (20) que comprende el sistema según una cualquiera de las reivindicaciones 1 a 8.
Los productos y servicios protegidos por este registro son:
B66C 13/46 - B66C 13/48 - B66C 13/00 - G01B 11/00 - G01B 11/24
Descripciones:
+ ES-2954312_A1 SISTEMA PARA ASISTIR A UNA GRÚA EN EL MOVIMIENTO DE UNA TAPA Y GRÚA QUE COMPRENDE DICHO SISTEMA CAMPO DE LA INVENCIÓN La presente invención pertenece al campo de la seguridad y el control para operar una grúa para carga y descarga de contenedores. Más concretamente, se refiere a un sistema de asistencia para controlar una grúa en trabajos de descarga desde, o de carga en un buque. La invención es aplicable para las maniobras de retirada o colocación de una tapa de la bodega de una embarcación. La invención tiene utilidad directa en el sector logístico, en particular en el ámbito portuario. ANTECEDENTES DE LA INVENCIÓN Una grúa para contenedores es una infraestructura de grandes dimensiones que sirve para la carga y descarga de mercancías en terminales de contenedores de puertos, estaciones ferroviarias, etc. En un barco portacontenedores, se cargan (o descargan) contenedores en (de) una zona de almacenaje del barco denominada bodega. Para ello hay que asegurar un acceso adecuado a la bodega que viene dado por una tapa de escotilla, también denominada simplemente tapa. También estas grúas cargan (o descargan) contenedores en (de) el muelle del puerto. En la actualidad la mayoría de las propuestas existentes para manejar una grúa para contenedores se basan en una operativa meramente manual con las desventajas que conlleva ante la posibilidad de fallos humanos. Una forma común de mejorar la seguridad es que las grúas implementen varios modos de operación que imponen limitaciones en los movimientos que puede realizarse desde el control de mando de la grúa (por ejemplo, la velocidad) . Entre los modos de operación está el modo "tapa", el modo "jaula" o, el más frecuente y, por eso normalmente establecido por defecto, el modo "contenedor". Estos modos de operación deben ser activados manualmente por el propio operario de la grúa. También existen algunas propuestas automáticas o semi-automáticas que se apoyan en sensores de proximidad situados en la cabeza de enganche de la grúa como asistentes en el manejo de la grúa para contenedores para ayudar al operario. Sin embargo, los sensores de proximidad suelen ser poco fiables y requerir elementos adicionales de identificación. Habitualmente, precisan implementar técnicas complejas debido a la movilidad de la cabeza de enganche (p.e. un cabezal de poleas) respecto a la cabina de la grúa. Además, la productividad se puede ver afectada porque se requiere parar una grúa para la reparación o mantenimiento de los sensores. A la vista de todo lo mencionado, sería deseable una solución que remedie los inconvenientes existentes, que facilite una correcta operativa y ayude a una efectiva gestión logística. DESCRIPCIÓN DE LA INVENCIÓN Es objeto de la invención un sistema según la reivindicación independiente que se concibe a la vista de los problemas identificados. Realizaciones particulares de la invención se definen en las reivindicaciones dependientes. De acuerdo con diversas realizaciones de la presente invención, se propone un sistema de asistencia para mejorar la productividad en la carga/descarga de contenedores en una embarcación. En particular, el sistema ayuda a controlar las maniobras sobre la tapa de escotilla (en adelante, tapa) . Una situación es cuando para poder coger un contenedor se ha de acceder a la bodega retirando una tapa. También, otra situación es cuando, para finalizar, se ha de colocar la tapa a la bodega. La invención emplea una cámara con campo de visión sobre el área de operación de la grúa de carga-descarga que opera con el contenedor o la tapa y, en general, con los elementos de carga/descarga; una unidad de procesamiento que implementa inteligencia artificial para tratar las imágenes captadas por la cámara, y que está entrenada previamente para, en tiempo real, identificar una tapa de acceso a una bodega, distinguiendo dicha tapa frente a otras posibles cargas existentes en un buque portacontenedores (en adelante, buque) o en un muelle; una unidad de comunicaciones, que se encarga de intercambiar mensajes con un panel de mando asociado a la grúa, bien directamente, bien usando una pasarela si hay incompatibilidad entre protocolos. De manera general, la presente invención aporta diversas ventajas. Mediante una correcta detección de la tapa en una embarcación, habitualmente, un buque portacontenedores, o bien en un muelle, se mejora la seguridad bien para retirarla o para colocarla. También, se incrementa la productividad de los terminales en un puerto atendidos por una grúa que implemente esta invención. Por ejemplo, ayuda a predecir el tiempo estimado de finalización (ETC, por sus siglas en inglés) . Volviendo al ejemplo de una tapa que descansa en una posición de origen, sobre un muelle y ha de colocarse en una posición de destino, cerrando una bodega de un buque. La grúa debe aprehender la tapa sin que se suelte ni golpee con otros elementos para colocarla en una posición de destino, en el acceso a la bodega del buque. Por tanto, mover una tapa no está exento de problemas y riesgos. Generalmente, requiere mucha mayor precisión del operador en las maniobras, puesto que, entre otras razones, debe ser extraída o devuelta en un entorno complejo rodeado de obstáculos. Igualmente, sucede cuando las maniobras son para su retirada de la bodega (posición de origen) del buque y su colocación en una zona asignada en un muelle (posición de destino) . Un accidente en estas circunstancias provoca costosas pérdidas. Por esta razón, la velocidad, la aceleración, el desplazamiento horizontal (translación) , y/o el desplazamiento vertical (elevación) deben ser controlados en función del tipo de carga con el que trabaja una grúa. No es deseable que sea solamente el operario el único encargado de identificar el tipo de carga y las maniobras asociadas permitidas. La invención permite implementar técnicas para ayudar en estas tareas. BREVE DESCRIPCIÓN DE LAS FIGURAS Las realizaciones de la presente invención se describen, solo a modo de ejemplo, en los dibujos adjuntos en los que los elementos similares están numerados de la misma manera. FIGS. 1A-1B son esquemas de ejemplos de funcionamiento con diferentes grúas. FIG. 2 es el esquema de un diagrama de bloques de un sistema. FIG. 3 es el esquema de un diagrama de flujo según un algoritmo de identificación. Glosario de referencias numéricas: 1 Cabina. 2 Pluma. 3 Contrapluma. 6 Sala de máquinas. 7 Rieles. 8 Cabezal de poleas. 10 Sistema para asistir a una grúa. 16 Cámara. 12 Unidad de procesamiento. 14 Unidad de comunicaciones. 20 Grúa para contenedores. 30 Contenedor. 31 Paso de captura de una imagen. 32 Paso de comprobación de error en la captura. 33 Paso de pre-procesamiento. 34 Paso de extracción de características. 35 Paso de clasificación. 36 Paso de comparación. 37 Paso de asignación de etiqueta "tapa". 38 Paso de asignación de etiqueta "no tapa". 39 Paso de comunicación con panel de mando 42 Tapa. 40 Barco. 44 Muelle. 46 Bodega. DESCRIPCIÓN DE MODOS DE REALIZACIÓN Con referencia a las figuras anteriores, sin carácter limitativo, se presentan diversas realizaciones de la invención para una mejor comprensión. La FIG. 1A es el esquema de un ejemplo de funcionamiento con una grúa 20 de tipo Quay que alza un contenedor 30 de un muelle 44 comandado por un operador desde una cabina 1 rotatoria unida con la pluma 2. Este tipo de grúa 20 permite implantar el sistema para asistir a una grúa objeto de la presente invención. La FIG. 1B es el esquema de un ejemplo de funcionamiento con una grúa 20 de tipo Gantr y que también permite implantar el sistema para asistir a una grúa objeto de la presente invención. Este tipo de grúas 20 tiene un bastidor de grandes dimensiones que sostiene la luma 2 a un lado, y la contrapluma 3 con la sala de máquinas 6 al otro. La grúa 20 es manejada por un operador desde una cabina 1 móvil ubicada en la pluma 2. La cabina 1 se desplaza por la pluma 2 junto con el cabezal de poleas 8 encargado de aprehender la carga. Para el movimiento transversal de la grúa 20 en un muelle 44, la grúa 20 puede montarse sobre rieles 7 o usar neumáticos. Durante los trabajos de un operario de una grúa 20, hay que realizar con relativa frecuencia maniobras con una tapa 42 para acceder a los contenedores 30 de la bodega 46. Una correcta identificación de la tapa 42 respalda la operativa de la grúa 20 y permite una manipulación segura. Se puede configurar la grúa 20 para reducir su velocidad, y/o aceleración, rango de desplazamiento (translación y/o elevación) , lo que previene posibles golpes y rotura de elementos del buque o del material transportado. También ayuda a verificar el correcto progreso de carga o descarga de contenedores 30 de un barco 40. Todo esto se debe a que la tapa 42 es un tipo de carga especial. Dadas las características (p.e. geometría y tamaño) de las tapas 42, requieren ser manejadas según un proceso específico y diferente de los contenedores u otras cargas con limitaciones en las características del movimiento. Es también un elemento importante puesto que da acceso a la bodega 46 del buque 40 donde se guardan los contenedores 30. En operaciones de carga del buque 40 los contenedores 30 están emplazados en el muelle 44 y deben llevarse al interior de la bodega 46. En operaciones de descarga del buque 40, se sacan contenedores 30 de la bodega 46 y se depositan en el muelle 44 el presente sistema monitoriza que se apliquen maniobras controladamente según el tipo de carga. La FIG.2 muestra un sistema 10 para asistir a una grúa 20 para contenedores 30. Una cámara 16 capta imágenes de un área de operación de la grúa 20. Las imágenes son enviadas a una unidad de procesamiento 12. La unidad de procesamiento 12 opera con estas imágenes para, en tiempo real, identificar una tapa 42 de una bodega en un barco 40. Para ello usa un modelo de red neuronal de inteligencia artificial que se explicará más adelante. Una unidad de comunicaciones 14 intercambia mensajes (en línea discontinua) con un panel de mando 22 donde un operario controla la grúa 20. Los mensajes pueden ser de diferentes tipos. Por ejemplo, un mensaje de aviso de identificación de tapa. El panel de mando 22 recibe este mensaje y puede reaccionar de diferentes maneras según se haya preestablecido. Por ejemplo, pidiendo a través de una interfaz, confirmación al operario de la grúa, para continuar. Por ejemplo, activando automáticamente el modo "tapa" que limita la magnitud de ciertos movimientos en la grúa. La FIG. 3 es un diagrama de flujo de la información captada por la cámara y las principales operaciones de la unidad de procesamiento que se realizan ella. Se describen los principales pasos del proceso de identificación de una carga, realizado en la unidad de procesamiento. El primer paso 31 es la captura de una imagen del área de interés por medio de la cámara. Esta imagen, que opcionalmente será codificada y/o comprimida, se transfiere a la unidad de procesamiento a través de algún medio de comunicaciones como puede ser una red IP local (cableada o inalámbrica) . El segundo paso 32 es la comprobación de error en la captura por si durante el paso de captura de la imagen se detectara un error, por ejemplo, de comunicaciones con la cámara, el análisis no podría realizarse y se emitiría un mensaje de error que sería enviado al panel de mando. En ausencia de problemas tras la comprobación de error 32, se procede con el tercer paso de pre-procesamiento 33 realizado por la unidad de procesamiento para su posterior análisis. Este pre-procesamiento 33 decodifica y/o descomprime la imagen si es necesario, hace un ajuste de canales (contraste, luminosidad, balance de blancos, etc.) y un ajuste de perspectiva (corrección de lente) si son necesarios. Adicionalmente, realiza un escalado para adaptar el tamaño de la imagen al tamaño adecuado según el análisis. El siguiente y cuarto paso es de extracción de características 34 de la imagen. Mediante una red neuronal previamente entrenada para este fin, se extrae un conjunto de características que resumen la información relevante de la imagen. El quinto paso es de clasificación 35. El conjunto de características previamente obtenido se pasa por un clasificador, también entrenado para esta tarea, cuya salida será una probabilidad asignada a que la imagen corresponda con estar manipulando una "tapa". El sexto paso es de comparación 36. El valor de probabilidad se evalúa mediante un comparador para en un séptimo paso de asignación de una etiqueta definitiva de "tapa" 37, o alternativamente, en un octavo paso de asignación de una etiqueta de "no tapa" 38 a esta imagen. Este paso de comparación 36 puede ser mediante un simple umbral estático o algún método recursivo con memoria de los valores anteriormente procesados. Esta etiqueta obtenida para la imagen mediante el proceso de análisis es enviada al panel de mando de la grúa mediante un método de comunicaciones como puede ser una red IP local (cableada o inalámbrica) . Una vez recibido, la grúa pasa a trabajar en modo tapa con limitaciones en la velocidad y desplazamiento de las maniobras. Si bien diversos aspectos de la invención han sido descritos con referencia a realizaciones concretas, se debe entender que pueden realizarse cambios y sustituirse elementos en tales realizaciones por otros equivalentes sin apartarse del alcance de la invención que definen las reivindicaciones adjuntas.
Publicaciones:
ES2954312 (21/11/2023) - A1 Solicitud de patente con informe sobre el estado de la técnica
Eventos:
En fecha 11/04/2022 se realizó Registro Instancia de Solicitud
En fecha 12/04/2022 se realizó Admisión a Trámite
En fecha 12/04/2022 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 13/04/2022 se realizó Superado examen de oficio
En fecha 28/02/2023 se realizó Realizado IET
En fecha 01/03/2023 se realizó 1109P_Comunicación Traslado del IET
En fecha 21/11/2023 se realizó Publicación Solicitud
En fecha 21/11/2023 se realizó Publicación Folleto Solicitud con IET (A1)
En fecha 07/03/2024 se realizó Validación petición y/o pago de examen sustantivo no conforme
En fecha 07/03/2024 se realizó Retirada
En fecha 07/03/2024 se realizó 1108P_Notificación retirada solicitud por no petición y/o pago de examen sustantivo
En fecha 13/03/2024 se realizó Publicación retirada solicitud por no petición y/o pago de examen sustantivo
Pagos:
11/04/2022 - Pago Tasas IET
Fuente de la información
Parte de la información aquí publicada es pública puesto que ha sido obtenida de la Oficina de Propiedad Industrial de los diferentes países el 27/04/2024 y por lo tanto puede ser que la información no esté actualizada.Parte de la información aquí mostrada ha sido calculada por nuestro sistema informático y puede no ser veraz.
Privacidad
Si considera que al información aquí publicada afecta a su privacidad y desea que eliminemos la información aquí publicada envíe un email a info@patentes-y-marcas.com o rellene el formulario que encontrará aquí.Información sobre el registro de patente nacional por SISTEMA PARA ASISTIR A UNA GRÚA EN EL MOVIMIENTO DE UNA TAPA Y GRÚA QUE COMPRENDE DICHO SISTEMA con el número P202230329
El registro de patente nacional por SISTEMA PARA ASISTIR A UNA GRÚA EN EL MOVIMIENTO DE UNA TAPA Y GRÚA QUE COMPRENDE DICHO SISTEMA con el número P202230329 fue solicitada el 11/04/2022. Se trata de un registro en España por lo que este registro no ofrece protección en el resto de países. El registro SISTEMA PARA ASISTIR A UNA GRÚA EN EL MOVIMIENTO DE UNA TAPA Y GRÚA QUE COMPRENDE DICHO SISTEMA con el número P202230329 fue solicitada por SIBRE BRAKES SPAIN, S.L. mediante los servicios del agente Isabel Carvajal y Urquijo. El registro [modality] por SISTEMA PARA ASISTIR A UNA GRÚA EN EL MOVIMIENTO DE UNA TAPA Y GRÚA QUE COMPRENDE DICHO SISTEMA con el número P202230329 está clasificado como B66C 13/46,B66C 13/48,B66C 13/00,G01B 11/00,G01B 11/24 según la clasificación internacional de patentes.
Otras invenciones solicitadas por SIBRE BRAKES SPAIN, S.L.
Es posible conocer todas las invenciones solicitadas por SIBRE BRAKES SPAIN, S.L. entre las que se encuentra el registro de patente nacional por SISTEMA PARA ASISTIR A UNA GRÚA EN EL MOVIMIENTO DE UNA TAPA Y GRÚA QUE COMPRENDE DICHO SISTEMA con el número P202230329. Si se desean conocer más invenciones solicitadas por SIBRE BRAKES SPAIN, S.L. clicar aquí.Otras invenciones solicitadas en la clasificación internacional de patentes B66C 13/46,B66C 13/48,B66C 13/00,G01B 11/00,G01B 11/24.
Es posible conocer invenciones similares al campo de la técnica se refiere. El registro de patente nacional por SISTEMA PARA ASISTIR A UNA GRÚA EN EL MOVIMIENTO DE UNA TAPA Y GRÚA QUE COMPRENDE DICHO SISTEMA con el número P202230329 está clasificado con la clasificación B66C 13/46,B66C 13/48,B66C 13/00,G01B 11/00,G01B 11/24 por lo que si se desea conocer más registros con la clasificación B66C 13/46,B66C 13/48,B66C 13/00,G01B 11/00,G01B 11/24 clicar aquí.Otras invenciones solicitadas a través del representante ISABEL CARVAJAL Y URQUIJO
Es posible conocer todas las invenciones solicitadas a través del agente ISABEL CARVAJAL Y URQUIJO entre las que se encuentra el registro patente nacional por SISTEMA PARA ASISTIR A UNA GRÚA EN EL MOVIMIENTO DE UNA TAPA Y GRÚA QUE COMPRENDE DICHO SISTEMA con el número P202230329. Si se desean conocer más invenciones solicitadas a través del agente ISABEL CARVAJAL Y URQUIJO clicar aquí.Patentes en España
Es posible conocer todas las invenciones publicadas en España entre las que se encuentra el registro patente nacional por SISTEMA PARA ASISTIR A UNA GRÚA EN EL MOVIMIENTO DE UNA TAPA Y GRÚA QUE COMPRENDE DICHO SISTEMA. Nuestro portal www.patentes-y-marcas.com ofrece acceso a las publicaciones de patentes en España. Conocer las patentes registradas en un país es importante para saber las posibilidades de fabricar, vender o explotar una invención en España.Patentes registradas en la clase B
Es posible conocer todas las patentes registradas en la clase B (TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTE ) entre las que se encuentra la patente SISTEMA PARA ASISTIR A UNA GRÚA EN EL MOVIMIENTO DE UNA TAPA Y GRÚA QUE COMPRENDE DICHO SISTEMA con el número P202230329. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase B66
Es posible conocer todas las patentes registradas en la clase B66 (ELEVACION; LEVANTAMIENTO; REMOLCADO) entre las que se encuentra la patente SISTEMA PARA ASISTIR A UNA GRÚA EN EL MOVIMIENTO DE UNA TAPA Y GRÚA QUE COMPRENDE DICHO SISTEMA con el número P202230329. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase B66C
Es posible conocer todas las patentes registradas en la clase B66C (GRUAS Y PUENTES-GRUA; ELEMENTOS O DISPOSITIVOS DE TOMA DE CARGA PARA GRUAS, PUENTES GRUA, CABRESTANT) entre las que se encuentra la patente SISTEMA PARA ASISTIR A UNA GRÚA EN EL MOVIMIENTO DE UNA TAPA Y GRÚA QUE COMPRENDE DICHO SISTEMA con el número P202230329. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase G
Es posible conocer todas las patentes registradas en la clase G (FISICA) entre las que se encuentra la patente SISTEMA PARA ASISTIR A UNA GRÚA EN EL MOVIMIENTO DE UNA TAPA Y GRÚA QUE COMPRENDE DICHO SISTEMA con el número P202230329. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase G01
Es posible conocer todas las patentes registradas en la clase G01 (METROLOGIA; ENSAYOS) entre las que se encuentra la patente SISTEMA PARA ASISTIR A UNA GRÚA EN EL MOVIMIENTO DE UNA TAPA Y GRÚA QUE COMPRENDE DICHO SISTEMA con el número P202230329. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase G01B
Es posible conocer todas las patentes registradas en la clase G01B (MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; ) entre las que se encuentra la patente SISTEMA PARA ASISTIR A UNA GRÚA EN EL MOVIMIENTO DE UNA TAPA Y GRÚA QUE COMPRENDE DICHO SISTEMA con el número P202230329. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.
¿Tienes alguna duda?
Escribe tu consulta y te responderemos rápida y gratuitamente.

Otras patentes similares

 P202230335
P202230335Profesionales Recomendados
Barcelona
933182440
España
933182440
España

Barcelona
+34 93 362 16 97
España
+34 93 362 16 97
España

Barcelona
932 593 600
España
932 593 600
España







