


- Home /
- Publicaciones de patentes /
- SISTEMA GIRADOR DE OBJETOS

Patente nacional por "SISTEMA GIRADOR DE OBJETOS"
Este registro ha sido solicitado por
INGENIERIA PLANA ALTA, S.A.
a través del representanteJAVIER UNGRÍA LÓPEZ
Contacto
- Estado: A punto de caducar
- País:
- España
- Fecha solicitud:
- 11/04/2022
- Número solicitud:
-
P202230326
- Número publicación:
-
ES2954285
- Fecha de concesión:
-
- Inventores:
-
Persona física
- Datos del titular:
-
INGENIERIA PLANA ALTA, S.A.
- Datos del representante:
-
Javier Ungría López
- Clasificación Internacional de Patentes:
- B65G 47/24,B65B 25/04
- Clasificación Internacional de Patentes de la publicación:
- B65G 47/24,B65B 25/04
- Fecha de vencimiento:
Quiero registrar una patente

Reivindicaciones:
+ ES-2954285_A11.- Sistema girador de objetos (2) , caracterizado por que comprende: - un módulo (1) que incluye al menos tres cintas individuales (3) , dispuestas inclinadas y convergentes hacia el punto central del módulo (1) , formando una cavidad de alojamiento de un objeto (2) , donde cada cinta individual es desplazable de forma individual a través de medios de avance/retroceso (6) mediante el accionamiento de medios motrices (7) individuales, - medios informáticos de visión y control (14) , configurados para captar la imagen de un objeto (2) , accionar los medios motrices (7) individuales y ubicar el objeto (2) en la posición requerida gobernando el avance/retroceso de las al menos tres cintas individuales (3) . 2.- Sistema, según la reivindicación 1, donde los medios informáticos de visión y control (14) están configurados para gobernar el avance/retroceso de las cintas individuales (3) mediante aproximaciones sucesivas de los movimientos de avance/retroceso de cada una de dichas cintas. 3.- Sistema, según la reivindicación 1, donde las cintas individuales (3) están fijadas sobre un plano (11) . 4.- Sistema, según la reivindicación 3, donde las cintas individuales (3) forman un ángulo de 45 grados respecto al plano (11) que las contiene. 5.- Sistema, según la reivindicación 1, donde las cintas individuales (3) , comprenden sub-cintas (4 y 5) , con diferentes longitudes. 6.- Sistema, según la reivindicación 5, donde cada una de las cintas individuales comprende una sub-cinta central (5) y una sub-cinta lateral (4) , a cada lado de la sub-cinta central, donde la sub-cinta central es de mayor longitud que las laterales. 7.- Sistema, según la reivindicación 6, que comprende una pluralidad de sub-cintas laterales (4) a cada lado de la cinta central (5) , cuyas longitudes van en disminución hacia los laterales. 8.- Sistema, según las reivindicaciones 2 o 3, donde el módulo (1) está configurado ara girar sobre sí mismo, según un eje perpendicular al plano (11) . 9.- Sistema, según una cualquiera de las reivindicaciones anteriores, donde el objeto (2) es un objeto esferoidal. 10.- Sistema, según la reivindicación 9, que se aplica a una máquina (10) de envasado de frutas dotada de un mecanismo de ventosa (9) con capacidad de giro en el plano horizontal.
Los productos y servicios protegidos por este registro son:
B65G 47/24 - B65B 25/04
Descripciones:
+ ES-2954285_A1 SISTEMA GIRADOR DE OBJETOS Objeto de la invención La presente invención se refiere a un sistema girador de objetos, preferentemente objetos esferoidales, que ha sido concebido para orientar dichos objetos, posicionándolos en una posición concreta. La invención es de aplicación en cualquier sector en el que se requiera situar un objeto con una orientación concreta, más particularmente es de aplicación para orientar piezas de fruta que se disponen ordenadas en contenedores para el almacenamiento, transporte y venta, como por ejemplo puede ser para ubicar en el contenedor piezas de fruta con el pedúnculo hacia arriba. Antecedentes de la invención En el estado de la técnica puede citarse el documento de patente US 6691854 que describe un dispositivo para orientar frutas, que comprende un soporte de transportador con soportes para las frutas, se eleva sincrónicamente codesplazable con los soportes y pude rotar con respecto a estos para sacar las frutas de los soportes y hacer girar las frutas hacia un detector, tal como una cámara, para detectar la posición de cada fruta. Un dispositivo de control para los elevadores está conectado al detector y activa los elevadores para un objeto pertinente siempre que se requiera girar cada fruta individual. Esta configuración precisa de un dispositivo elevador mediante el que se realiza el giro de la fruta, lo que complica su configuración. En el documento de patente EP 2167408 se emplea un sistema de visión de análisis de imágenes de fruta que se transporta girando. Esta información sobre la orientación y la posición de la fruta puede ser utilizada posteriormente para manipular la fruta; por ejemplo, mediante un robot que realiza el envasado de fruta en una posición y orientación deseada. Por consiguiente se requiere el empleo de un robot, lo que encarece notablemente la implementación de la funcionalidad que permite envasar la fruta con una orientación deseada. La invención proporciona un sistema girador concebido para orientar objetos con el fin de posicionarlos en función de una marca o elemento de referencia incluido en su superficie, omo por ejemplo se requiere en el envasado de frutas que se disponen ordenadas en contenedores de transporte y venta, en los que se posicionan, por ejemplo, con el pedúnculo orientado hacia arriba, por estética y/o para evitar daños o marcas entre las frutas, que proporciona una configuración simplificada para rotar diferentes tamaños de objetos (por ejemplo diferentes tamaños de fruta) y que además facilita la colocación del objeto en la posición requerida. Descripción de la invención Para conseguir los objetivos y resolver los problemas anteriormente comentados, la invención consiste en un sistema girador de objetos, preferentemente esferoidales, que presenta como principal novedad la incorporación de un módulo que está dotado de al menos tres cintas individuales, dispuestas inclinadas y convergentes hacia el punto central del módulo, formando una cavidad de alojamiento de un objeto, donde cada cinta individual es desplazable de forma individual a través de medios de avance/retroceso mediante el accionamiento de medios motrices individuales. Preferentemente se utilizarán tres cintas individuales, de manera que se asegura un contacto del objeto simultáneamente con las tres cintas incluso para objetos poco esféricos y muy deformados, siendo el número mínimo de cintas para girar el objeto en direcciones suficientes para colocarlo en cualquier posición. Sin embargo, el número de cintas individuales puede variar en función de las necesidades y las características que pueda presentar el objeto esferoidal. Además, el sistema comprende medios informáticos de visión y control, configurados para captar y procesar la imagen de un objeto, situado en la cavidad, y accionar los medios motrices individuales para ubicar el objeto en la posición requerida mediante el gobierno del avance/retroceso individual de las tres cintas. La configuración descrita presenta la ventaja de que la disposición inclinada de las al menos tres cintas individuales, permite la recepción de diferentes tamaños de objetos al mismo tiempo que facilita su recepción y alojamiento en la cavidad. En la realización preferente, los medios informáticos de visión y control están configurados para gobernar el avance/retroceso de las cintas individuales mediante interpolación de aproximaciones sucesivas de los movimientos de avance/retroceso de cada una de dichas cintas individualmente, lo que permite obtener el posicionado correcto de los objetos, al compensar el deslizamiento del objeto sobre las cintas mediante las aproximaciones sucesivas, debido a un comportamiento matemático-geométrico del sistema cintas-objeto Además, en la realización preferente de la invención las cintas individuales forman un ángulo de 45 grados respecto a un plano que las contiene, y consecuentemente forman un ángulo entre ellas de 90 grados, configuración que facilita la recepción y alojamiento de los objetos en la cavidad formada. Obviamente estos ángulos pueden variarse en función de las necesidades del objeto a girar. Cada una de las cintas individuales, comprenden sub-cintas con diferentes longitudes; una sub-cinta central y una o más sub-cintas laterales. En una realización comprende una sub-cinta central y una sub-cinta lateral a cada lado de la sub-cinta central, de forma que la sub-cinta central es de mayor longitud que las laterales, formando la cavidad a modo de cuenco comentada. También se ha previsto que pueda comprender una pluralidad de sub-cintas laterales a cada lado de la cinta central, cuyas longitudes van en disminución hacia los laterales. Por lo tanto existe una sub-cinta central que penetra hacia abajo en la cavidad en mayor medida y una o más sub-cintas en cada lateral de la sub-cinta central que penetran en menor medida hacia abajo de la cavidad, a medida que se sitúan más alejadas de la sub cinta central, de forma que las sub-cintas laterales quedan dispuesta retranqueadas en la zona del fondo, proporcionando un cuenco cerrado que evita que pequeños y grandes objetos puedan escapar del espacio delimitado por la cavidad formada. Se ha previsto que el módulo esté configurado de forma que puede girar sobre si mismo rotando el plano, en el que están dispuestas las al menos tres bandas, según un eje perpendicular. En la realización preferente de la invención el sistema se aplica a una máquina de envasado de frutas dotada de un mecanismo de ventosa con capacidad de giro en el plano horizontal para proporcionar una posibilidad más de giro en el caso en el que fuera conveniente rotar la fruta en dicho plano horizontal. Descripción de las figuras Para completar la descripción y con objeto de ayudar a una mejor comprensión de las características del invento, se acompaña a esta memoria descriptiva, como parte integrante de la misma, un conjunto de figuras en las que con carácter ilustrativo y no limitativo, se ha representado lo siguiente: La figura 1 muestra una vista en alzado de un ejemplo de realización de la invención. La figura 2 muestra una vista en planta del ejemplo de la figura anterior. La figura 3 muestra una sección del ejemplo de las figuras anteriores, en el que se ha representado, en línea de trazos, diferentes tamaños de un objeto esferoidal durante el proceso de colocación. La figura 4 muestra una vista en perspectiva del ejemplo de las figuras anteriores. La figura 5 muestra una vista en planta de un posible ejemplo de aplicación de la invención a una máquina de envasado de frutas. La figura 6 muestra una vista lateral de la figura anterior. Realización preferente de la invención A continuación se realiza una descripción de la invención basada en las figuras anteriormente comentadas, que consiste en un sistema girador concebido para orientar objetos 2, preferentemente esferoidales, con el fin de posicionarlos en función de una marca o elemento de referencia incluido en su superficie, como por ejemplo se requiere en el envasado de frutas que se disponen ordenadas en contenedores 8 de transporte y venta, en los que se posicionan, por ejemplo, con el pedúnculo orientado hacia arriba, por estética y/o para evitar daños o marcas entre las frutas, tal y como se muestra en la figura 6 El sistema comprende un módulo 1 que se puede montar en diferentes instalaciones, como por ejemplo puede ser en una máquina 10 de envasado como la mostrada en las figuras 5 y 6, según se describe más adelante. El módulo 1 está compuesto por al menos tres cintas individuales 3, dispuestas sobre un mismo plano 11 con una cierta inclinación convergiendo hacia el punto central del módulo 1, preferentemente con un ángulo de 45 grados respecto al plano 11, por lo que quedan dispuestas formando entre ellas un ángulo de 90 grados. Las cintas individuales 3 están formadas por sub-cintas 4, 5, con diferentes longitudes, que en el ejemplo comprenden dos sub-cintas laterales 4 y una sub-cinta central 5 de mayor longitud que las anteriores, formando una cavidad a modo de cuenco, que permite abarcar objetos 2 de diferentes tamaños, permitiendo alojar los objetos de menor tamaño o diámetro en el fondo de la cavidad, tal y como se muestra en las figuras 3 y 4. En otras realizaciones (no mostradas) , se varía el número de sub-cintas laterales 4 por cada cinta individual 3, en cuyo caso se ha previsto que su longitud se acorte progresivamente a medida se disponen hacia los laterales, quedando situadas retranqueadas en la zona del ondo de la cavidad, con la sub-cinta central de mayor longitud que el resto, para conseguir la funcionalidad comentada. Las sub-cintas 4 y 5 están dispuestas sobre soportes 12 en los que están fijados medios motrices 7, que a través de medios de avance 6 accionan las sub-cintas 4 y 5 simultáneamente, de manera que cada una de dichas cintas individuales 3 pueden ser activadas de forma independiente para hacer girar el objeto 2, en función de la posición que tiene y de la posición final que se desea que adquiera, como por ejemplo puede ser el caso de situar una fruta con el pedúnculo hacia arriba. Para ello, el sistema comprende medios informáticos de visión y control 14, configurados para captar y procesar la imagen de un objeto situado en la cavidad, y para accionar las cintas individuales 3 y posicionar el cuerpo 2 en la posición requerida, interpolando el avance o retroceso de las cintas individuales 3, para conseguir el giro deseado, de forma que en ningún momento se aprecia que el objeto 2 gire solidario a cualquiera de las tres cintas 3. Por consiguiente para conseguir ubicar el punto de referencia en la vertical del objeto 2 se efectúan varias interpolaciones, de modo que las cintas giran normalmente a mayor velocidad que el objeto 2, cuya velocidad y/o sentido de giro se modifica varias veces por segundo. Esta regulación, produce un efecto visual que da la sensación de que el objeto flota sobre las cintas 3, ya que se mantiene en contacto con las tres cintas individuales 3, obteniéndose el posicionamiento deseado por aproximaciones sucesivas de los movimientos de las tres cintas 3, gobernado por los medios informáticos de visión y control que compensa el deslizamiento del objeto sobre las cintas debido a un comportamiento matemático-geométrico del sistema cintas-objeto. La configuración descrita permite mantener los objetos dentro de la cavidad, sin que puedan saltar fuera de ella, durante el proceso de orientación, En las figuras 5 y 6 se muestra un ejemplo de aplicación del sistema a una máquina 10 para envasar frutas, que está dotada de un bastidor 13 inclinado en el que se disponen varios de los módulos 1, sobre los que, un transportador (no representado) , deja caer el objeto 2 (fruta esferoidal) , posición en la que los medios informáticos de visión y control 14 actúan sobre los medios motrices 7 para ubicar la pieza de fruta con el pedúnculo hacia arriba, según fue descrito, y posteriormente un mecanismo de ventosa 9 la traslada desde el módulo 1 correspondiente hasta un contenedor 8 en el que se almacena la fruta con el pedúnculo situado en la vertical para su transporte y venta. La inclinación del bastidor 13 tiene como objeto que el contenedor 8 se llene de forma más regular y estable al apoyarse unos frutos contra otros. Se ha previsto que el mecanismo de ventosa 9 pueda tener capacidad de giro en el plano horizontal para el caso en el que fuera conveniente rotar la fruta en dicho plano horizontal Esta capacidad de rotación también puede ser una característica de los propios módulos 1, es decir, una vez posicionado el peciolo en la vertical del fruto, todo el módulo girará sobre si mismo rotando el plano 11 sobre un eje perpendicular para aportar una grado más de posicionamiento, tal y como se muestra en la figura 2.
Publicaciones:
ES2954285 (21/11/2023) - A1 Solicitud de patente con informe sobre el estado de la técnica
Eventos:
En fecha 11/04/2022 se realizó Registro Instancia de Solicitud
En fecha 12/04/2022 se realizó Admisión a Trámite
En fecha 12/04/2022 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 13/04/2022 se realizó Superado examen de oficio
En fecha 08/07/2022 se realizó Inscripcion de Cesion F202230631
En fecha 08/07/2022 se realizó Alta mandatario por inscripción de transmisión F202230631
En fecha 10/02/2023 se realizó Realizado IET
En fecha 13/02/2023 se realizó 1109P_Comunicación Traslado del IET
En fecha 21/11/2023 se realizó Publicación Solicitud
En fecha 21/11/2023 se realizó Publicación Folleto Solicitud con IET (A1)
En fecha 16/02/2024 se realizó PETEX_Petición de examen sustantivo
En fecha 07/03/2024 se realizó Validación petición y/o pago de examen sustantivo conforme
Pagos:
11/04/2022 - Pago Tasas IET
+ ES-2954285_A11.- Sistema girador de objetos (2) , caracterizado por que comprende: - un módulo (1) que incluye al menos tres cintas individuales (3) , dispuestas inclinadas y convergentes hacia el punto central del módulo (1) , formando una cavidad de alojamiento de un objeto (2) , donde cada cinta individual es desplazable de forma individual a través de medios de avance/retroceso (6) mediante el accionamiento de medios motrices (7) individuales, - medios informáticos de visión y control (14) , configurados para captar la imagen de un objeto (2) , accionar los medios motrices (7) individuales y ubicar el objeto (2) en la posición requerida gobernando el avance/retroceso de las al menos tres cintas individuales (3) . 2.- Sistema, según la reivindicación 1, donde los medios informáticos de visión y control (14) están configurados para gobernar el avance/retroceso de las cintas individuales (3) mediante aproximaciones sucesivas de los movimientos de avance/retroceso de cada una de dichas cintas. 3.- Sistema, según la reivindicación 1, donde las cintas individuales (3) están fijadas sobre un plano (11) . 4.- Sistema, según la reivindicación 3, donde las cintas individuales (3) forman un ángulo de 45 grados respecto al plano (11) que las contiene. 5.- Sistema, según la reivindicación 1, donde las cintas individuales (3) , comprenden sub-cintas (4 y 5) , con diferentes longitudes. 6.- Sistema, según la reivindicación 5, donde cada una de las cintas individuales comprende una sub-cinta central (5) y una sub-cinta lateral (4) , a cada lado de la sub-cinta central, donde la sub-cinta central es de mayor longitud que las laterales. 7.- Sistema, según la reivindicación 6, que comprende una pluralidad de sub-cintas laterales (4) a cada lado de la cinta central (5) , cuyas longitudes van en disminución hacia los laterales. 8.- Sistema, según las reivindicaciones 2 o 3, donde el módulo (1) está configurado ara girar sobre sí mismo, según un eje perpendicular al plano (11) . 9.- Sistema, según una cualquiera de las reivindicaciones anteriores, donde el objeto (2) es un objeto esferoidal. 10.- Sistema, según la reivindicación 9, que se aplica a una máquina (10) de envasado de frutas dotada de un mecanismo de ventosa (9) con capacidad de giro en el plano horizontal.
Los productos y servicios protegidos por este registro son:
B65G 47/24 - B65B 25/04
Descripciones:
+ ES-2954285_A1 SISTEMA GIRADOR DE OBJETOS Objeto de la invención La presente invención se refiere a un sistema girador de objetos, preferentemente objetos esferoidales, que ha sido concebido para orientar dichos objetos, posicionándolos en una posición concreta. La invención es de aplicación en cualquier sector en el que se requiera situar un objeto con una orientación concreta, más particularmente es de aplicación para orientar piezas de fruta que se disponen ordenadas en contenedores para el almacenamiento, transporte y venta, como por ejemplo puede ser para ubicar en el contenedor piezas de fruta con el pedúnculo hacia arriba. Antecedentes de la invención En el estado de la técnica puede citarse el documento de patente US 6691854 que describe un dispositivo para orientar frutas, que comprende un soporte de transportador con soportes para las frutas, se eleva sincrónicamente codesplazable con los soportes y pude rotar con respecto a estos para sacar las frutas de los soportes y hacer girar las frutas hacia un detector, tal como una cámara, para detectar la posición de cada fruta. Un dispositivo de control para los elevadores está conectado al detector y activa los elevadores para un objeto pertinente siempre que se requiera girar cada fruta individual. Esta configuración precisa de un dispositivo elevador mediante el que se realiza el giro de la fruta, lo que complica su configuración. En el documento de patente EP 2167408 se emplea un sistema de visión de análisis de imágenes de fruta que se transporta girando. Esta información sobre la orientación y la posición de la fruta puede ser utilizada posteriormente para manipular la fruta; por ejemplo, mediante un robot que realiza el envasado de fruta en una posición y orientación deseada. Por consiguiente se requiere el empleo de un robot, lo que encarece notablemente la implementación de la funcionalidad que permite envasar la fruta con una orientación deseada. La invención proporciona un sistema girador concebido para orientar objetos con el fin de posicionarlos en función de una marca o elemento de referencia incluido en su superficie, omo por ejemplo se requiere en el envasado de frutas que se disponen ordenadas en contenedores de transporte y venta, en los que se posicionan, por ejemplo, con el pedúnculo orientado hacia arriba, por estética y/o para evitar daños o marcas entre las frutas, que proporciona una configuración simplificada para rotar diferentes tamaños de objetos (por ejemplo diferentes tamaños de fruta) y que además facilita la colocación del objeto en la posición requerida. Descripción de la invención Para conseguir los objetivos y resolver los problemas anteriormente comentados, la invención consiste en un sistema girador de objetos, preferentemente esferoidales, que presenta como principal novedad la incorporación de un módulo que está dotado de al menos tres cintas individuales, dispuestas inclinadas y convergentes hacia el punto central del módulo, formando una cavidad de alojamiento de un objeto, donde cada cinta individual es desplazable de forma individual a través de medios de avance/retroceso mediante el accionamiento de medios motrices individuales. Preferentemente se utilizarán tres cintas individuales, de manera que se asegura un contacto del objeto simultáneamente con las tres cintas incluso para objetos poco esféricos y muy deformados, siendo el número mínimo de cintas para girar el objeto en direcciones suficientes para colocarlo en cualquier posición. Sin embargo, el número de cintas individuales puede variar en función de las necesidades y las características que pueda presentar el objeto esferoidal. Además, el sistema comprende medios informáticos de visión y control, configurados para captar y procesar la imagen de un objeto, situado en la cavidad, y accionar los medios motrices individuales para ubicar el objeto en la posición requerida mediante el gobierno del avance/retroceso individual de las tres cintas. La configuración descrita presenta la ventaja de que la disposición inclinada de las al menos tres cintas individuales, permite la recepción de diferentes tamaños de objetos al mismo tiempo que facilita su recepción y alojamiento en la cavidad. En la realización preferente, los medios informáticos de visión y control están configurados para gobernar el avance/retroceso de las cintas individuales mediante interpolación de aproximaciones sucesivas de los movimientos de avance/retroceso de cada una de dichas cintas individualmente, lo que permite obtener el posicionado correcto de los objetos, al compensar el deslizamiento del objeto sobre las cintas mediante las aproximaciones sucesivas, debido a un comportamiento matemático-geométrico del sistema cintas-objeto Además, en la realización preferente de la invención las cintas individuales forman un ángulo de 45 grados respecto a un plano que las contiene, y consecuentemente forman un ángulo entre ellas de 90 grados, configuración que facilita la recepción y alojamiento de los objetos en la cavidad formada. Obviamente estos ángulos pueden variarse en función de las necesidades del objeto a girar. Cada una de las cintas individuales, comprenden sub-cintas con diferentes longitudes; una sub-cinta central y una o más sub-cintas laterales. En una realización comprende una sub-cinta central y una sub-cinta lateral a cada lado de la sub-cinta central, de forma que la sub-cinta central es de mayor longitud que las laterales, formando la cavidad a modo de cuenco comentada. También se ha previsto que pueda comprender una pluralidad de sub-cintas laterales a cada lado de la cinta central, cuyas longitudes van en disminución hacia los laterales. Por lo tanto existe una sub-cinta central que penetra hacia abajo en la cavidad en mayor medida y una o más sub-cintas en cada lateral de la sub-cinta central que penetran en menor medida hacia abajo de la cavidad, a medida que se sitúan más alejadas de la sub cinta central, de forma que las sub-cintas laterales quedan dispuesta retranqueadas en la zona del fondo, proporcionando un cuenco cerrado que evita que pequeños y grandes objetos puedan escapar del espacio delimitado por la cavidad formada. Se ha previsto que el módulo esté configurado de forma que puede girar sobre si mismo rotando el plano, en el que están dispuestas las al menos tres bandas, según un eje perpendicular. En la realización preferente de la invención el sistema se aplica a una máquina de envasado de frutas dotada de un mecanismo de ventosa con capacidad de giro en el plano horizontal para proporcionar una posibilidad más de giro en el caso en el que fuera conveniente rotar la fruta en dicho plano horizontal. Descripción de las figuras Para completar la descripción y con objeto de ayudar a una mejor comprensión de las características del invento, se acompaña a esta memoria descriptiva, como parte integrante de la misma, un conjunto de figuras en las que con carácter ilustrativo y no limitativo, se ha representado lo siguiente: La figura 1 muestra una vista en alzado de un ejemplo de realización de la invención. La figura 2 muestra una vista en planta del ejemplo de la figura anterior. La figura 3 muestra una sección del ejemplo de las figuras anteriores, en el que se ha representado, en línea de trazos, diferentes tamaños de un objeto esferoidal durante el proceso de colocación. La figura 4 muestra una vista en perspectiva del ejemplo de las figuras anteriores. La figura 5 muestra una vista en planta de un posible ejemplo de aplicación de la invención a una máquina de envasado de frutas. La figura 6 muestra una vista lateral de la figura anterior. Realización preferente de la invención A continuación se realiza una descripción de la invención basada en las figuras anteriormente comentadas, que consiste en un sistema girador concebido para orientar objetos 2, preferentemente esferoidales, con el fin de posicionarlos en función de una marca o elemento de referencia incluido en su superficie, como por ejemplo se requiere en el envasado de frutas que se disponen ordenadas en contenedores 8 de transporte y venta, en los que se posicionan, por ejemplo, con el pedúnculo orientado hacia arriba, por estética y/o para evitar daños o marcas entre las frutas, tal y como se muestra en la figura 6 El sistema comprende un módulo 1 que se puede montar en diferentes instalaciones, como por ejemplo puede ser en una máquina 10 de envasado como la mostrada en las figuras 5 y 6, según se describe más adelante. El módulo 1 está compuesto por al menos tres cintas individuales 3, dispuestas sobre un mismo plano 11 con una cierta inclinación convergiendo hacia el punto central del módulo 1, preferentemente con un ángulo de 45 grados respecto al plano 11, por lo que quedan dispuestas formando entre ellas un ángulo de 90 grados. Las cintas individuales 3 están formadas por sub-cintas 4, 5, con diferentes longitudes, que en el ejemplo comprenden dos sub-cintas laterales 4 y una sub-cinta central 5 de mayor longitud que las anteriores, formando una cavidad a modo de cuenco, que permite abarcar objetos 2 de diferentes tamaños, permitiendo alojar los objetos de menor tamaño o diámetro en el fondo de la cavidad, tal y como se muestra en las figuras 3 y 4. En otras realizaciones (no mostradas) , se varía el número de sub-cintas laterales 4 por cada cinta individual 3, en cuyo caso se ha previsto que su longitud se acorte progresivamente a medida se disponen hacia los laterales, quedando situadas retranqueadas en la zona del ondo de la cavidad, con la sub-cinta central de mayor longitud que el resto, para conseguir la funcionalidad comentada. Las sub-cintas 4 y 5 están dispuestas sobre soportes 12 en los que están fijados medios motrices 7, que a través de medios de avance 6 accionan las sub-cintas 4 y 5 simultáneamente, de manera que cada una de dichas cintas individuales 3 pueden ser activadas de forma independiente para hacer girar el objeto 2, en función de la posición que tiene y de la posición final que se desea que adquiera, como por ejemplo puede ser el caso de situar una fruta con el pedúnculo hacia arriba. Para ello, el sistema comprende medios informáticos de visión y control 14, configurados para captar y procesar la imagen de un objeto situado en la cavidad, y para accionar las cintas individuales 3 y posicionar el cuerpo 2 en la posición requerida, interpolando el avance o retroceso de las cintas individuales 3, para conseguir el giro deseado, de forma que en ningún momento se aprecia que el objeto 2 gire solidario a cualquiera de las tres cintas 3. Por consiguiente para conseguir ubicar el punto de referencia en la vertical del objeto 2 se efectúan varias interpolaciones, de modo que las cintas giran normalmente a mayor velocidad que el objeto 2, cuya velocidad y/o sentido de giro se modifica varias veces por segundo. Esta regulación, produce un efecto visual que da la sensación de que el objeto flota sobre las cintas 3, ya que se mantiene en contacto con las tres cintas individuales 3, obteniéndose el posicionamiento deseado por aproximaciones sucesivas de los movimientos de las tres cintas 3, gobernado por los medios informáticos de visión y control que compensa el deslizamiento del objeto sobre las cintas debido a un comportamiento matemático-geométrico del sistema cintas-objeto. La configuración descrita permite mantener los objetos dentro de la cavidad, sin que puedan saltar fuera de ella, durante el proceso de orientación, En las figuras 5 y 6 se muestra un ejemplo de aplicación del sistema a una máquina 10 para envasar frutas, que está dotada de un bastidor 13 inclinado en el que se disponen varios de los módulos 1, sobre los que, un transportador (no representado) , deja caer el objeto 2 (fruta esferoidal) , posición en la que los medios informáticos de visión y control 14 actúan sobre los medios motrices 7 para ubicar la pieza de fruta con el pedúnculo hacia arriba, según fue descrito, y posteriormente un mecanismo de ventosa 9 la traslada desde el módulo 1 correspondiente hasta un contenedor 8 en el que se almacena la fruta con el pedúnculo situado en la vertical para su transporte y venta. La inclinación del bastidor 13 tiene como objeto que el contenedor 8 se llene de forma más regular y estable al apoyarse unos frutos contra otros. Se ha previsto que el mecanismo de ventosa 9 pueda tener capacidad de giro en el plano horizontal para el caso en el que fuera conveniente rotar la fruta en dicho plano horizontal Esta capacidad de rotación también puede ser una característica de los propios módulos 1, es decir, una vez posicionado el peciolo en la vertical del fruto, todo el módulo girará sobre si mismo rotando el plano 11 sobre un eje perpendicular para aportar una grado más de posicionamiento, tal y como se muestra en la figura 2.
Publicaciones:
ES2954285 (21/11/2023) - A1 Solicitud de patente con informe sobre el estado de la técnica
Eventos:
En fecha 11/04/2022 se realizó Registro Instancia de Solicitud
En fecha 12/04/2022 se realizó Admisión a Trámite
En fecha 12/04/2022 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 13/04/2022 se realizó Superado examen de oficio
En fecha 08/07/2022 se realizó Inscripcion de Cesion F202230631
En fecha 08/07/2022 se realizó Alta mandatario por inscripción de transmisión F202230631
En fecha 10/02/2023 se realizó Realizado IET
En fecha 13/02/2023 se realizó 1109P_Comunicación Traslado del IET
En fecha 21/11/2023 se realizó Publicación Solicitud
En fecha 21/11/2023 se realizó Publicación Folleto Solicitud con IET (A1)
En fecha 16/02/2024 se realizó PETEX_Petición de examen sustantivo
En fecha 07/03/2024 se realizó Validación petición y/o pago de examen sustantivo conforme
Pagos:
11/04/2022 - Pago Tasas IET
Fuente de la información
Parte de la información aquí publicada es pública puesto que ha sido obtenida de la Oficina de Propiedad Industrial de los diferentes países el 29/04/2024 y por lo tanto puede ser que la información no esté actualizada.Parte de la información aquí mostrada ha sido calculada por nuestro sistema informático y puede no ser veraz.
Privacidad
Si considera que al información aquí publicada afecta a su privacidad y desea que eliminemos la información aquí publicada envíe un email a info@patentes-y-marcas.com o rellene el formulario que encontrará aquí.Información sobre el registro de patente nacional por SISTEMA GIRADOR DE OBJETOS con el número P202230326
El registro de patente nacional por SISTEMA GIRADOR DE OBJETOS con el número P202230326 fue solicitada el 11/04/2022. Se trata de un registro en España por lo que este registro no ofrece protección en el resto de países. El registro SISTEMA GIRADOR DE OBJETOS con el número P202230326 fue solicitada por INGENIERIA PLANA ALTA, S.A. mediante los servicios del agente Javier Ungría López. El registro [modality] por SISTEMA GIRADOR DE OBJETOS con el número P202230326 está clasificado como B65G 47/24,B65B 25/04 según la clasificación internacional de patentes.
Otras invenciones solicitadas por INGENIERIA PLANA ALTA, S.A.
Es posible conocer todas las invenciones solicitadas por INGENIERIA PLANA ALTA, S.A. entre las que se encuentra el registro de patente nacional por SISTEMA GIRADOR DE OBJETOS con el número P202230326. Si se desean conocer más invenciones solicitadas por INGENIERIA PLANA ALTA, S.A. clicar aquí.Otras invenciones solicitadas en la clasificación internacional de patentes B65G 47/24,B65B 25/04.
Es posible conocer invenciones similares al campo de la técnica se refiere. El registro de patente nacional por SISTEMA GIRADOR DE OBJETOS con el número P202230326 está clasificado con la clasificación B65G 47/24,B65B 25/04 por lo que si se desea conocer más registros con la clasificación B65G 47/24,B65B 25/04 clicar aquí.Otras invenciones solicitadas a través del representante JAVIER UNGRÍA LÓPEZ
Es posible conocer todas las invenciones solicitadas a través del agente JAVIER UNGRÍA LÓPEZ entre las que se encuentra el registro patente nacional por SISTEMA GIRADOR DE OBJETOS con el número P202230326. Si se desean conocer más invenciones solicitadas a través del agente JAVIER UNGRÍA LÓPEZ clicar aquí.Patentes en España
Es posible conocer todas las invenciones publicadas en España entre las que se encuentra el registro patente nacional por SISTEMA GIRADOR DE OBJETOS. Nuestro portal www.patentes-y-marcas.com ofrece acceso a las publicaciones de patentes en España. Conocer las patentes registradas en un país es importante para saber las posibilidades de fabricar, vender o explotar una invención en España.Patentes registradas en la clase B
Es posible conocer todas las patentes registradas en la clase B (TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTE ) entre las que se encuentra la patente SISTEMA GIRADOR DE OBJETOS con el número P202230326. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase B65
Es posible conocer todas las patentes registradas en la clase B65 (TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES) entre las que se encuentra la patente SISTEMA GIRADOR DE OBJETOS con el número P202230326. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase B65G
Es posible conocer todas las patentes registradas en la clase B65G (DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRA) entre las que se encuentra la patente SISTEMA GIRADOR DE OBJETOS con el número P202230326. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase B65B
Es posible conocer todas las patentes registradas en la clase B65B (MAQUINAS, APARATOS, DISPOSITIVOS O PROCEDIMIENTOS DE EMBALAJE DE OBJETOS O MATERIALES; DESEMBALAJE) entre las que se encuentra la patente SISTEMA GIRADOR DE OBJETOS con el número P202230326. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.
¿Tienes alguna duda?
Escribe tu consulta y te responderemos rápida y gratuitamente.

Otras patentes similares
 P202230329
P202230329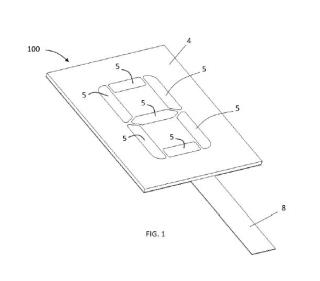
Profesionales Recomendados
Barcelona
933182440
España
933182440
España

Barcelona
+34 93 362 16 97
España
+34 93 362 16 97
España

Barcelona
932 593 600
España
932 593 600
España







