


- Home /
- Publicaciones de patentes /
- SISTEMA DE PERFUSIÓN DE FÁRMACOS EN LAZO CERRADO CON CONTROL SINÉRGICO
Patente nacional por "SISTEMA DE PERFUSIÓN DE FÁRMACOS EN LAZO CERRADO CON CONTROL SINÉRGICO"
Este registro ha sido solicitado por
Persona física
a través del representanteELZABURU, S.L.P
Contacto
- Estado: A punto de caducar
- País:
- España
- Fecha solicitud:
- 23/04/2020
- Número solicitud:
-
P202030337
- Número publicación:
-
ES2808969
- Fecha de concesión:
-
04/10/2022
- Inventores:
-
Persona física
- Datos del titular:
-
Persona física
- Datos del representante:
-
ELZABURU, S.L.P
- Clasificación Internacional de Patentes:
- A61B 5/00,A61M 5/172,G16H 20/17
- Clasificación Internacional de Patentes de la publicación:
- A61B 5/00,A61M 5/172,G16H 20/17
- Fecha de vencimiento:
Quiero registrar una patente

Reivindicaciones:
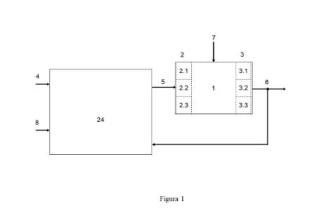
+ ES-2808969_A11. Sistema para la multi-perfusión automática de fármacos con sinergia a pacientes por vía intravenosa, caracterizado por que comprende: - un subsistema de bombas de perfusión (2) , configurado para suministrar al paciente (1) una cantidad de fármacos; - un subsistema de monitorización (3) , configurado para medir un conjunto de variables fisiológicas con información del estado del paciente; - un subsistema de control (24) , configurado para adaptar la cantidad suministrada de cada fármaco (5) por el subsistema de bombas de perfusión (2) , basado en una cantidad de perfusión inicial predeterminada (4) , unos valores objetivo de monitorización (8) , una realimentación (6) de las variables fisiológicas medidas y una sinergia entre los fármacos, donde el subsistema de control comprende: o un módulo generador de errores de control (11) configurado para calcular errores (12, 13, 14) basado en los valores objetivo de monitorización (8) y la realimentación de las variables fisiológicas medidas; o un controlador (16) configurado para determinar una perfusión de control (15) para cada uno de los fármacos basada en los errores (12, 13, 14) calculados por el módulo generador de errores de control (11) y la cantidad de perfusión inicial predeterminada (4) ; o un módulo de corrección (17) configurado para recibir las medidas del conjunto de variables fisiológicas desde el subsistema de monitorización (3) y modificar la perfusión de control (15) del controlador (16) , incrementando en función de un umbral superior o disminuyendo en función de un umbral inferior, dicha perfusión para conducir las variables fisiólogicas a un rango seguro preestablecido para las variables fisiológicas; y o un módulo de seguridad (19) configurado para recibir la perfusión de control (15) de cada fármaco y modificar dicha perfusión limitándola entre dos valores de perfusión, un límite inferior y otro límite superior, que aseguran la no hipermedicación para cada fármaco. 2. Sistema de acuerdo a la reivindicación 1 donde el módulo generador de errores de control (11) está configurado para generar, por cada una de las variables del conjunto de ariables fisiológicas con información del estado del paciente a medir por el subsistema de monitorización (3) , un vector de control (12, 13, 14) y donde el controlador es de carácter multivariable tipo MIMO y comprende un subsistema de control MISO para cada fármaco, que a su vez comprende controladores SISO configurados para recibir los errores de control y determinar un vector de perfusión de control (15) para cada fármaco. 3. Sistema de acuerdo a cualquiera de las reivindicaciones anteriores que además comprende un módulo cuantificador conectado entre el módulo de seguridad (19) y el subsistema de bombas de perfusión (2) , donde el módulo cuantificador está configurado para adaptar el vector de salida del módulo de seguridad de manera que sea interpretable por las bombas de perfusión (2) . 4. Sistema de acuerdo a cualquiera de las reivindicaciones anteriores, donde el subsistema de control (24) además comprende un banco de filtros (9) configurado para recibir las señales de realimentación (6) enviada por el subsistema de monitorización (3) . 5. Sistema de acuerdo a cualquiera de las reivindicaciones anteriores donde el módulo generador de errores de control (11) comprende varios submódulos de generador de errores para cada una de las variables del conjunto de variables monitorizadas con información del estado del paciente a medir por el subsistema de monitorización (3) . 6. Sistema de acuerdo a cualquiera de las reivindicaciones anteriores, donde los fármacos son fármacos anestésicos que inducen al paciente a un estado anestésico y donde el conjunto de variables fisiológicas que mide el subsistema de monitorización tienen información de dicho estado anestésico del paciente. 7. Sistema de acuerdo a la reivindicación 6 donde el conjunto de variables con información del estado anestésico del paciente comprenden eBIS, eNOX y eNMB o monitores equivalentes de hipnosis, nocicepción o relajación muscular, respectivamente. 8. Sistema de acuerdo a la reivindicación 7 donde el subsistema de bombas de perfusión (2) comprende: una primera bomba de perfusión de un fármaco con propiedades hipnóticas, una segunda bomba de perfusión de un fármaco con propiedades analgésicas y una tercera bomba de perfusión de un fármaco con propiedades de relajación muscular. 9. Sistema de acuerdo a la reivindicación 8 donde el fármaco con propiedades hipnóticas es propofol, el fármaco con propiedades analgésicas es remifentanilo y el fármaco con propiedades de relajación muscular es rocuronio. 10. Sistema de acuerdo a cualquiera de las reivindicaciones 8 o 9, que además comprende unas bombas adicionales para la perfusión de otros fármacos que alteren el estado anestésico o constantes vitales del paciente. 11. Sistema de acuerdo a cualquiera de las reivindicaciones anteriores donde el subsistema de control (24) está personalizado específicamente para el paciente basándose en métodos de sintonía del controlador a través de las varias ganancias relativas a cada controlador SISO y de al menos uno de los siguientes parámetros fisiológicos propios del paciente: peso, altura, sexo, masa muscular e historial clínico. 12. Sistema de acuerdo a cualquiera de las reivindicaciones 2-11 donde el controlador MIMO es un controlador multivariable MIMO-PID, los subsistemas de control MISO son subsistemas de control de tipo MISO-PID y los controladores SISO son de tipo SISO-PID. 13.Sistema de acuerdo a la reivindicación 12 donde el vector de control (12.13.14) del módulo generador de errores de control (11) , tiene una componente de error asimétrico proporcional (12.1, 13.1, 14.1) , una componente de error simétrico integral (12.2, 13.2, 14.2) , una componente de error asimétrico derivativo (12.3, 13.3, 14.3) y componentes de error adicionales, y donde los controladores SISO-PID (25.1, 25.2, 25.3, 26.1, 26.2, 26.3, 27.1, 27.2, 27.3) están configurados para recibir respectivamente la componente de error asimétrico proporcional, la componente de error simétrico integral y la componente de error asimétrico derivativo de cada vector de control y determinar el vector de perfusión de control (15) para cada fármaco. 14. Sistema de acuerdo a cualquiera de las reivindicaciones anteriores donde el subsistema de control (24) está además configurado para el control de la glucosa de pacientes enfermos de diabetes tipo 1, donde el subsistema de monitorización además está configurado para medir la glucosa del paciente y donde el subsistema de perfusión está además configurado para suministrar al paciente una cantidad continua y controlada de insulina y glucagón.
+ ES-2808969_B21. S i s t e m a p a r a l a m u l t i - p e r f u s i ó n a u t o m á t i c a d e f á r m a c o s c o n s i n e r g i a a p a c i e n t e s p o r v í a i n t r a v e n o s a, c a r a c t e r i z a d o p o r q u e c o m p r e n d e : - u n s u b s i s t e m a d e b o m b a s d e p e r f u s i ó n ( 2 ) , c o n f i g u r a d o p a r a s u m i n i s t r a r a l p a c ie n t e ( 1 ) u n a c a n t i d a d d e f á r m a c o s ; - u n s u b s i s t e m a d e m o n i t o r i z a c i ó n ( 3 ) , c o n f i g u r a d o p a r a m e d i r u n c o n j u n t o d e v a r i a b l e s f i s i o l ó g i c a s c o n i n f o r m a c i ó n d e l e s t a d o d e l p a c ie n t e ; - u n s u b s i s t e m a d e c o n t r o l ( 24 ) , c o n f i g u r a d o p a r a a d a p t a r la c a n t i d a d s u m i n i s t r a d a d e c a d a f á r m a c o ( 5 ) p o r e l s u b s i s t e m a d e b o m b a s d e p e r f u s i ó n ( 2 ) , b a s a d o e n u n a c a n t i d a d d e p e r f u s i ó n i n i c i a l p r e d e t e r m i n a d a ( 4 ) , u n o s v a l o r e s o b j e t i v o d e m o n i t o r i z a c i ó n ( 8 ) , u n a r e a l i m e n t a c i ó n ( 6 ) d e l a s v a r i a b l e s f i s i o l ó g i c a s m e d i d a s y u n a s i n e r g i a e n t r e lo s f á r m a c o s, d o n d e e l s u b s i s t e m a d e c o n t r o l c o m p r e n d e : o u n m ó d u l o g e n e r a d o r d e e r r o r e s d e c o n t r o l ( 1 1 ) c o n f i g u r a d o p a r a c a l c u l a r e r r o r e s ( 12, 13, 14 ) b a s a d o e n l o s v a l o r e s o b j e t i v o d e m o n i t o r i z a c i ó n ( 8 ) y la r e a l i m e n t a c i ó n d e l a s v a r i a b l e s f i s i o l ó g i c a s m e d i d a s ; o u n c o n t r o l a d o r ( 1 6 ) c o n f i g u r a d o p a r a d e t e r m i n a r u n a p e r f u s i ó n d e c o n t r o l ( 1 5 ) p a r a c a d a u n o d e l o s f á r m a c o s b a s a d a e n l o s e r r o r e s ( 12, 13, 14 ) c a l c u l a d o s p o r e l m ó d u l o g e n e r a d o r d e e r r o r e s d e c o n t r o l ( 11 ) y la c a n t i d a d d e p e r f u s i ó n i n i c i a l p r e d e t e r m i n a d a ( 4 ) ; o u n m ó d u l o d e c o r r e c c i ó n ( 1 7 ) c o n f i g u r a d o p a r a r e c i b i r l a s m e d i d a s d e l c o n j u n t o d e v a r i a b l e s f i s i o l ó g i c a s d e s d e e l s u b s i s t e m a d e m o n i t o r i z a c i ó n ( 3 ) y m o d i f i c a r l a p e r f u s i ó n d e c o n t r o l ( 15 ) d e l c o n t r o l a d o r ( 16 ) , i n c r e m e n t a n d o e n f u n c i ó n d e u n u m b r a l s u p e r i o r o d i s m i n u y e n d o e n f u n c i ó n d e u n u m b r a l i n f e r i o r, d i c h a p e r f u s i ó n p a r a c o n d u c i r l a s v a r i a b l e s f i s i o l ó g i c a s a u n r a n g o s e g u r o p r e e s t a b l e c i d o p a r a l a s v a r i a b l e s f i s i o l ó g i c a s ; y o u n m ó d u l o d e s e g u r i d a d ( 1 9 ) c o n f i g u r a d o p a r a r e c ib i r l a p e r f u s i ó n d e c o n t r o l ( 15 ) d e c a d a f á r m a c o y m o d i f i c a r d i c h a p e r f u s i ó n l i m i t á n d o l a e n t r e d o s v a l o r e s d e p e r f u s i ó n, u n l í m i t e i n f e r i o r y o t r o l í m i t e s u p e r i o r, q u e a s e g u r a n l a n o h i p e r m e d i c a c i ó n p a r a c a d a f á r m a c o . s i e n d o e l e r r o r a s i m é t r i c o p r o p o r c i o n a l e v : e p = - B - y T + y f s i e n d o e l e r r o r a s i m é t r i c o d e r i v a t i v o e D : e D = - G • y T + y f s i e n d o y T u n v e c t o r d e o b je t i v o s d e l a s v a r i a b l e s f i s i o l ó g i c a s ; s i e n d o y f u n v e c t o r d e l a s v a r i a b l e s f i s i o l ó g i c a s f i l t r a d a s ; s i e n d o B u n a m a t r i z d i a g o n a l d e a s i m e t r í a e n e l e r r o r p r o p o r c i o n a l, t a l q u e : T d o n d e y t h b e s u n v e c t o r d e u m b r a l e s q u e d e t e r m i n a n e l v a l o r m á x im o d e d i a g { B ) ; s i e n d o G u n a m a t r i z d i a g o n a l d e a s i m e t r í a e n e l e r r o r d e r i v a t i v o, t a l q u e : d o n d e y t h g e s u n v e c t o r d e u m b r a l e s q u e d e t e r m i n a n e l v a l o r m á x im o d e d . i a g { G ) . 2. S i s t e m a d e a c u e r d o a c u a l q u i e r a d e l a s r e i v i n d i c a c i o n e s a n t e r i o r e s q u e a d e m á s c o m p r e n d e u n m ó d u l o c u a n t i f i c a d o r c o n e c t a d o e n t r e e l m ó d u l o d e s e g u r i d a d ( 19 ) y e l s u b s i s t e m a d e b o m b a s d e p e r f u s i ó n ( 2 ) , d o n d e e l m ó d u l o c u a n t i f i c a d o r e s t á c o n f i g u r a d o p a r a a d a p t a r e l v e c t o r d e s a l i d a d e l m ó d u l o d e s e g u r i d a d d e m a n e r a q u e s e a i n t e r p r e t a b l e p o r l a s b o m b a s d e p e r f u s i ó n ( 2 ) . 3. S i s t e m a d e a c u e r d o a c u a l q u i e r a d e l a s r e i v i n d i c a c i o n e s a n t e r i o r e s, d o n d e e l s u b s i s t e m a d e c o n t r o l ( 24 ) a d e m á s c o m p r e n d e u n b a n c o d e f i l t r o s ( 9 ) c o n f i g u r a d o p a r a r e c ib i r l a s s e ñ a l e s d e r e a l i m e n t a c i ó n ( 6 ) e n v i a d a p o r e l s u b s i s t e m a d e m o n i t o r i z a c i ó n ( 3 ) . 4. S i s t e m a d e a c u e r d o a c u a l q u i e r a d e l a s r e i v i n d i c a c i o n e s a n t e r i o r e s d o n d e e l m ó d u l o g e n e r a d o r d e e r r o r e s d e c o n t r o l ( 11 ) c o m p r e n d e v a r i o s s u b m ó d u l o s d e g e n e r a d o r d e e r r o r e s p a r a c a d a u n a d e l a s v a r i a b l e s d e l c o n j u n t o d e v a r i a b l e s m o n i t o r i z a d a s c o n i n f o r m a c i ó n d e l e s t a d o d e l p a c i e n t e a m e d i r p o r e l s u b s i s t e m a d e m o n i t o r i z a c i ó n ( 3 ) . 5. S i s t e m a d e a c u e r d o a c u a l q u i e r a d e l a s r e i v i n d i c a c i o n e s a n t e r i o r e s, d o n d e l o s f á r m a c o s s o n f á r m a c o s a n e s t é s i c o s q u e i n d u c e n a l p a c i e n t e a u n e s t a d o a n e s t é s i c o y d o n d e e l c o n j u n t o d e v a r i a b l e s f i s i o l ó g i c a s q u e m i d e e l s u b s i s t e m a d e m o n i t o r i z a c i ó n t i e n e n i n f o r m a c i ó n d e d i c h o e s t a d o a n e s t é s i c o d e l p a c ie n t e . 7. S i s t e m a d e a c u e r d o a la r e i v i n d i c a c i ó n 6 d o n d e e l s u b s i s t e m a d e b o m b a s d e p e r f u s i ó n ( 2 ) c o m p r e n d e : u n a p r i m e r a b o m b a d e p e r f u s i ó n d e u n f á r m a c o c o n p r o p i e d a d e s h i p n ó t i c a s, u n a s e g u n d a b o m b a d e p e r f u s i ó n d e u n f á r m a c o c o n p r o p i e d a d e s a n a l g é s i c a s y u n a t e r c e r a b o m b a d e p e r f u s i ó n d e u n f á r m a c o c o n p r o p i e d a d e s d e r e la j a c i ó n m u s c u l a r . 8. S i s t e m a d e a c u e r d o a l a r e i v i n d i c a c i ó n 7 d o n d e e l f á r m a c o c o n p r o p i e d a d e s h i p n ó t i c a s e s p r o p o f o l, e l f á r m a c o c o n p r o p i e d a d e s a n a l g é s i c a s e s r e m i f e n t a n i l o y e l f á r m a c o c o n p r o p i e d a d e s d e r e la j a c i ó n m u s c u l a r e s r o c u r o n i o . 9. S i s t e m a d e a c u e r d o a c u a l q u i e r a d e l a s r e i v i n d i c a c i o n e s 7 o 8, q u e a d e m á s c o m p r e n d e u n a s b o m b a s a d i c i o n a l e s p a r a l a p e r f u s i ó n d e o t r o s f á r m a c o s q u e a l t e r e n e l e s t a d o a n e s t é s i c o o c o n s t a n t e s v i t a l e s d e l p a c ie n t e . 10. S i s t e m a d e a c u e r d o a c u a l q u i e r a d e l a s r e i v i n d i c a c i o n e s a n t e r i o r e s d o n d e e l s u b s i s t e m a d e c o n t r o l ( 24 ) e s t á a d e m á s c o n f i g u r a d o p a r a e l c o n t r o l d e l a g l u c o s a d e p a c i e n t e s e n f e r m o s d e d i a b e t e s t i p o 1, d o n d e e l s u b s i s t e m a d e m o n i t o r i z a c i ó n a d e m á s e s t á c o n f i g u r a d o p a r a m e d i r l a g l u c o s a d e l p a c i e n t e y d o n d e e l s u b s i s t e m a d e p e r f u s i ó n e s t á a d e m á s c o n f i g u r a d o p a r a s u m i n i s t r a r a l p a c i e n t e u n a c a n t i d a d c o n t i n u a y c o n t r o l a d a d e i n s u l i n a y g l u c a g ó n .
Los productos y servicios protegidos por este registro son:
A61B 5/00 - A61M 5/172 - G16H 20/17
Descripciones:
+ ES-2808969_A1 SISTEMA DE PERFUSIÓN DE FÁRMACOS EN LAZO CERRADO CON CONTROL SINÉRGICO SECTOR DE LA TÉCNICA La presente invención se encuadra en el campo del control en lazo cerrado (closed-loop, CL) para la perfusión automática de fármacos, por ejemplo en actos de anestesia administrada por vía intravenosa (IV) , utilizando para ello un banco de algoritmos de control basados en variantes del controlador PID (proporcional-integral-derivativo) . La presente invención se enmarca en el sector de control automático de sistemas biológicos y presenta como principal campo de aplicación el multicontrol automatizado de las perfusiones de fármacos por vía IV en actos anestésicos. Pero puede ser empleado en el control de enfermedades agudas o crónicas en las que el paciente requiera de una monitorización múltiple con la perfusión de varios fármacos. Una aplicación directa de esta invención sería la aplicación en el páncreas artificial para el control de la diabetes tipo 1 con monitorización de la glucosa y con la infusión continua exógena de insulina y glucagón (Peters, T. M., and A. Haidar. "Dualnhormone artificial páncreas: benefits and limitations compared with singleDhormone systems." Diabetic Medicine 35.4 (2018) : 450 459.) . De igual modo y con la misma idea se puede aplicar al sector veterinario para la dispensación simultánea de varios fármacos a los animales, con el fin de aplicarles anestesia. También podría ser usado para controlar patologías agudas o crónicas en las que se necesite monitorizar varias variables fisiológicas del animal y admistrarle varios fármacos de forma simultánea. ANTECEDENTES DE LA INVENCIÓN La definición de anestesiología, proporcionada por la American Board ofanaesthesiology, afirma que la anestesiología es la práctica de la medicina que proporciona insensibilidad al dolor durante procedimientos quirúrgicos, obstétricos, terapéuticos y de diagnóstico. Los anestesiólogos administran los fármacos por diferentes accesos del cuerpo humano ara establecer un estado en el que se puede realizar una cirugía no traumática para el paciente. Las técnicas actuales de anestesia general establecen tres objetivos principales que deben cumplirse: 1) profundidad de la hipnosis (en inglés, Depth of Hypnosis, DoH) ; 2) analgesia (ANG) y 3) relajación muscular (en inglés, Muscle Relaxation, MRX) . Existen métodos para estimar estas variables (en esta descripción se referirá a estas variables como monitores) , respectivamente: 1) el índice biespectral (BIS) es una medida de electroencefalograma multifactorial derivada empíricamente, cuyo índice dado se correlaciona con la DoH del paciente (G. Schneider et al., Detection of awareness in surgical patients with eeg-based indicesbispectral index and patient state index, British journal of anaesthesia 91 (3) (2003) 329-335) ; 2) el índice de respuesta de estimulación nociceptiva (NOX) es un índice univariante calculado a partir de las concentraciones ponderadas del fármaco empleado, propuesto para predecir la probabilidad de respuesta a un estímulo nociceptivo durante la anestesia (P. Schumacher et al., Time-based online display of a noxious stimulus response index base on pharmacological data, in: Annual Meeting of the American Society of Anesthesiologists. San Francisco, California. Anesthesiology, Vol. 107, 2007, p. A17) ; y 3) el relajante muscular se administra con el fin de mantener el nivel deseado de bloqueo neuromuscular (NMB) durante la cirugía (Á. Miranda et al., Optimal time for constant drug infusion initialization in neuromuscular blockade control, in: 2014 IEEE International Symposium on Medical Measurements and Applications (MeMeA) , IEEE, 2014, pp. 1-6) . Adicionalmente, existen otras variables fisiológicas objeto de monitorización y de mucho interés para el especialista como son la cardiografía, la presión arterial, la oxigenación en sangre o la capnografía. El proceso de anestesia general IV generalmente conocido como anestesia IV total, se desarrolla en un escenario clínico que se presenta generalmente en tres fases: 1) fase de inducción (en inglés induction phase, IPh) , los fármacos se administran mediante bolo y perfusión constante; el paciente es conducido al estado anestésico deseado, tratando de obtener los valores deseados de DoH, ANG y MRX lo más rápidamente posible; 2) fase de mantenimiento (en inglés, maintenance phase, MPh) , comienza el procedimiento quirúrgico, y se realiza una perfusión de diferentes fármacos modificados convenientemente por el anestesiólogo para mantener el estado anestésico deseado; los fármacos utilizados de forma simultánea pueden presentar un efecto sinérgico; el objetivo en esta fase es mantener el estado anestésico cercano a los valores objetivo; y 3) fase de recuperación (en inglés, recover y phase, RPh) , se detiene la administración de los ármacos para recuperar la consciencia, para eliminar ANG y MRX (F. Padula, C. lonescu, N. Latronico, M. Paltenghi, A. Visioli, G. Vivacqua, Optimized PID control of depth of hypnosis in anesthesia, Computer methods and programs in biomedicine 144 (2017) 21-35) . En la actualidad, los protocolos más utilizados en IV son las perfusiones controladas manualmente y el método Target Control Infusion (TCI) , que consiste en administrar una perfusión constante de los fármacos también durante la MPh, calculada adecuadamente a partir de un valor de referencia deseado de perfusión (Á. Miranda et al., Optimal time for constant drug infusion initialization in neuromuscular blockade control, in: 2014 IEEE International Symposium on Medical Measurements and Applications (MeMeA) , IEEE, 2014, pp. 1-6) . La administración de fármacos IV por perfusión ofrece múltiples ventajas (M. C. van den Nieuwenhuyzen et al., Burm Target-controlled infusion systems, Clinical pharmacokinetics 38 (2) (2000) 181-190) . Sin embargo, varios factores no hacen tan evidente el uso de TCI en la práctica clínica, como la experiencia del anestesista, la preferencia personal, la variabilidad clínica farmacocinética interindividual y la comprensión de los principios de la TCI. En consecuencia, TCI se ha convertido en el puente entre la investigación en curso y la práctica clínica actual, abriendo la posibilidad de diseñar sofisticados sistemas de automatización. La aplicación del control con realimentación sobre los fármacos de perfusión en anestesia ha sido ampliamente investigado ya que el control automático en CL presenta una serie de ventajas socio-económicas, como son: 1) la reducción de costes tanto para el paciente como para el sistema sanitario, al igual que la reducción de la carga de trabajo del anestesiólogo; 2) la reducción de la dosis utilizada, lo que implica un tiempo de recuperación más rápido y, en consecuencia, una mejor recuperación del paciente en el postoperatorio; y 3) un rendimiento más robusto con menos episodios de sobre/infradosificación. En resumen, esto se traduce en una mayor seguridad clínica para el paciente (F. Padula et al., Optimized PID control of depth of hypnosis in anesthesia, Computer methods and programs in biomedicine 144 (2017) 21-35) . Sin embargo, aunque se han desarrollado varios sistemas en las últimas décadas, todos ellos siguen siendo prototipos sin marca CE ni aprobación de la FDA para su uso clínico. El control automático en anestesia pretende mantener un estado anestésico satisfactorio cercano a los valores objetivo de las variables de monitorización deseadas además de un alto rechazo a las perturbaciones consideradas como las modificaciones en el estado nestésico ocasionadas por la actuación del cirujano (F. Padula et al, Optimized PID control of depth of hypnosis in anesthesia, Computer methods and programs in biomedicine 144 (2017) 21-35) . Kai Kuck, en su artículo "The Three Laws of Autonomous and Closed-Loop Systems in anaesthesia" (Kuck, K., & Johnson, K. B. The three laws of autonomous and closed-loop systems in anesthesia. Anesthesia & Analgesia 124 (2017) 377-380) , postula tres leyes a las cuales los sistemas autónomos de anestesia deben estar sujetos: 1) no hacer daño, el sistema debe ser seguro para el paciente y en caso de fallo, debe fallar ligeramente, descartando cualquier tipo de peligro; 2) ser transparente, esto es, el sistema debe ejecutar los objetivos establecidos de forma fiable y comprensible, permitiendo al anestesiólogo predecir su comportamiento; y 3) reducir la carga de trabajo, el sistema en sí no debe requerir una atención excesiva para mantener una función adecuada, permitiendo que el anestesiólogo se centre en otras tareas más importantes. Los algoritmos de control más comunes utilizados en CL en anestesia son: modelo de control interno, modelo de control predictivo, control proporcional integral y derivativo (PID) y control basado en inteligencia artificial (F. Padula et al, Optimized PID control of depth of hypnosis in anesthesia, Computer methods and programs in biomedicine 144 (2017) 21-35) . Aun así, la opción más eficaz sigue siendo el control mediante PID, objeto de propuestas recientes y variadas. Además, se ha demostrado cómo el rendimiento alcanzado por un controlador PID correctamente ajustado aplicado en anestesia, tiene el mismo o mejor rendimiento que cualquier otro controlador, independientemente de su complejidad (L. Merigo et al, Event based control of propofol and remifentanil coadministration during clinical anesthesia, in: 2017 3rd International Conference on Event-Based Control, Communication and Signal Processing, IEEE, 2017, pp. 1-8) . Los controladores PID han sido utilizados mediante diferentes enfoques de diseño para abordar el problema de automaticación del acto anestésico. Existen propuestas primarias para la coadministración de PPF y RMF guiadas por BIS (N. Liu et al., Closed-loop coadministration of propofol and remifentanil guided by bispectral index: a randomized multicenter study, Anesthesia & Analgesia 112 (3) (2011) 546- 557) , pero también se presenta un enfoque de diseño más complejos (K. van Heusden et al., Robust miso control of propofol-remifentanil anesthesia guided by the neurosense monitor, IEEE Transactions on Control Systems Technology 26 (5) (2018) 1758-1770) , ofreciendo un controlador de salida única multientrada (MISO) para anestesia PPF-RMF guiado por la retroalimentación de una medida de DoH. Se han implementado otros enfoques basados en controladores PID para regular la DoH en anestesia utilizando la administración de PPF y el BIS como una variable controlada, con la diferencia de que Padula y su equipo (F. Padula et al., Optimized PID control of depth of hypnosis in anesthesia, Computer methods and programs in biomedicine 144 (2017) 21-35) establecen un conjunto de doce pacientes virtuales (VPs) representativos de una varianza poblacional relativamente grande que se utiliza para probar la robustez del controlador; y Merigo (L. Merigo et al., Event based control of propofol and remifentanil coadministration during clinical anesthesia, in: 2017 3rd International Conference on Event-Based Control, Communication and Signal Processing (EBCCSP) IEEE, 2017, pp. 1-8) propone un nuevo generador de eventos con altas propiedades de filtrado de ruido, además de un controlador PIDPlus, donde la acción de control se actualiza sólo cuando ocurre un evento. Por último, Merigo y su equipo (L. Merigo et al., A model-based control scheme for depth of hypnosis in anesthesia, Biomedical Signal Processing and Control 42 (2018) 216-229) realizaron un algoritmo de control PID basado en el modelo farmacocinético y farmacodinámico del paciente para la administración de PPF, cuya concentración estimada en el lugar de efecto se utiliza como señal de retroalimentación. Algunos de los trabajos más recientes ofrecen diferentes arquitecturas de esquemas de control PID, como Pawlowski y su equipo (A. Pawlowski et al, Two-degreeof-freedom control scheme for depth of hypnosis in anesthesia, IFACPapersOnLine 51 (4) (2018) 72 77) , que presentan un PID de dos grados de libertad para DoH, utilizando BIS como variable controlada. Presentan dos filtros, uno de primer orden y otro de segundo orden paso bajo, para obtener una respuesta adecuada a los cambios de producidos en la señal de referencia. Otro enfoque destacable es el presentado recientemente por Merigo (L. Merigo et al., Optimized pid control of propofol and remifentanil coadministration for general anesthesia, Communications in Nonlinear Science and Numerical Simulation 72 (2019) 194-212) , donde se propone un sistema optimizado en CL basado en PID para DoH mediante el uso de PPF-RMF y BIS. En este trabajo, el sintonizado se ha realizado mediante la aplicación de PSO (Particle Swarm Optimization) a una cohorte de 13 VPs. Se han identificado una serie de dificultades relacionadas con los problemas en el control en CL del acto anestésico que deben ser abordadas: 1) el control unilateral, debido a la o consideración de fármacos antagonistas; 2) los retardos, las oscilaciones en CL y las inestabilidades aumentan a causa de los retardos; 3) las variables a controlar no son las variables procedentes de los monitores (las mediciones) ; 4) los fármacos presentan un efecto de memoria cuando se administran al paciente; y 5) la sinergia que pueden presentar los distintos fármacos a administrar. Además, en el estado del arte se han podido detectar ciertas limitaciones en la aplicación del control en CL en anestesia, estas son: 1) no existe una propuesta formal que combine los principales estados anestésicos (DoH, ANG y MRX) ; y 2) aunque los algoritmos basados en PID son efectivos para resolver el problema de control, éste no ha sido utilizado de forma multivariable para la perfusión de múltiples fármacos utilizando múltiples variables fisiológicas. En relación con la presente invención se han encontrado los siguientes documentos del estado de la técnica: - ES2297940T3 (2001) , Aparato para proporcionar a un paciente consciente alivio del dolor y la ansiedad asociados con procedimientos médicos o quirúrgicos. Se reivindica un sistema para proporcionar, a través de una gestión conservadora de equipo lógico informático, la entrega de uno o más fármacos amnésicos, analgésicos o sedantes con la monitorización electrónica de una o más condiciones fisiológicas del paciente. - CN1561241B (2002) , Apparatuses and methods for titrating drug deliver y . Se reivindica un sistema de suministro de fármacos a un paciente, en el que dicho sistema comprende: una interfaz de usuario para recibir información del usuario, un dispositivo de suministro de fármacos y un monitor fisiológico regulado por un algoritmo. - US8998808B2 (2004) , System for identifying patient response to anesthesia infusion. Se reivindica un aparato para la asistencia a un profesional durante la administración de un fármaco para la anestesia en un paciente, que comprende: un sistema de procesamiento que recibe los datos correspondientes, una memoria que almacena los datos, un procesador que resuelve la fórmula y una pantalla que muestra los datos resultantes al especialista anestesista. - ES2293366T3 (2006) , Sistema de suministro de fármaco intravenoso controlado por ordenador. Se reivindica un aparato para controlar y dirigir una anestesia IV /o la aplicación de otros fármacos IVs a un paciente. Además, almacena los datos del experto beneficiario del sistema, siendo estos recuperables. - ES2267767 (2007) , System and method of adaptative drug deliver y . Se reivindica un Sistema para determinar y mantener un nivel de concentración de fármaco deseado en un paciente para determinar y mantener un efecto deseado sobre ese paciente. El sistema comprende un conjunto de sensores, una unidad de suministro de fármaco y un controlador en CL de suministro con una entrada acoplada a dicho conjunto y una salida acoplada a dicha unidad de suministro. - JP5792629B2 (2009) , System for controlling the means for injection of anesthetic or sedative agents. Se reivindica un sistema de control de anestesia IV para la inducción y mantenimiento de la sedación, el cual contiene los medios para la adquisición y análisis de la señal de control. - ES2429688 (2013) , Apparatuses and methods for titrating drug deliver y . Se reivindica un Sistema para proporcionar la entrega de fármaco a un paciente. Dicho Sistema comprende una interfaz de usuario, un dispositivo de entrega del fármaco, múltiples monitores fisiológicos y un procesador que integra la interfaz del usuario. - CN103212119B (2013) , Based on target-controlled infusion pump bis anesthesia feedback controller. Se reivindica un sistema de control en lazo cerrazo basado en BIS el cual contiene un algoritmo de control PID borroso. - CN106859592A (2015) , TCI-based (target controlled infusion based) anesthesia depth intelligent control system. Se reivindica un sistema de control TCI inteligente basado en la monitorización del BIS en anestesia. - US20180296759A1 (2016) , Methods and systems for closed-loop control of drug administration. Se reivindica un sistema de control en circuito cerrado para la administración de al menos un fármaco a un paciente, el sistema de control que contiene: un actuador que administra el fármaco, uno o más monitores fisiológicos y un procesador que determina la señal de control. Referente a lo anteriormente expuesto, se pueden encontrar invenciones que reivindican sistemas de control basados en un solo monitor, concretamente, BIS (CN103212119B y CN106859592A) ; otras, de entre los diferentes principales estados anestésicos se refieren únicamente a la sedación (JP5792629B2) . Una de las patentes más avanzadas reivindica un sistema para la perfusión de al menos un fármaco en base a uno o más monitores fisiológicos; sin embargo, dicha invención basa su control en el uso de un controlador de modelos predictivos (en inglés, Model Predictive Controller, MPC) en los que tampoco consta la atención a la sinergia que pueden presentar los fármacos empleados. No existe indicio alguno de que en la actualidad haya un sistema de bombas de perfusión que integre el método de multi-perfusión de fármacos anestésicos con control MIMO-PID aplicado en actos anestésicos vía IV, configurable a la cantidad de fármacos utilizados, a la cantidad de variables de monitorización que se utilicen y que considere la relación sinérgica existente entre los diferentes fármacos empleados. Adicionalmente, no existe indicio alguno de un método que contemple la multi-perfusión de otros tipos de fármacos diferentes a los empleados en anestesia. DESCRIPCIÓN DE LA INVENCIÓN Para ayudar a comprender el método que se ejecuta en un sistema electrónico, inicialmente se presentan los listados con los nombres y su significado de abreviaturas, variables y sistemas. Con las abreviaturas se simplifican nombres largos que aparecen con mucha frecuencia en el texto, con este listado se favorece la comprensión de la lectura hasta la familiarización de los conceptos por parte del lector (si el acrónimo refiere a un nombre en plural este terminará con "s", por ejemplo "IV" se refiere a intravenoso e "IVs" se refiere a intravenosos) . A continuación, se relacionan las abreviaturas por orden alfabético: Abreviatura Significado A Analgesia C (Closed-loop) lazo cerrado D Derivativo D (Depth ofHypnosis) profundidad hipnótica e (Bispectral Index) índice biespectral o monitor equivalente de hipnosis e (Neuromuscular Blockade Index) o monitor equivalente de relajación muscular e (Noxious Stimulation Response Index) o monitor equivalente de nocicepción e Propofol o fármaco equivalente con propiedades hipnóticas e Rocuronio o fármaco equivalente con propiedades de bloqueo muscular e Remifentanilo o fármaco equivalente con propiedades analgésicas I Integral IP (Induction phase) fase de inducción IV Intravenoso o Intravenosa MI Sistema controlador PID de múltiple entrada y múltiple salida MI Sistema controlador PID de múltiple entrada y salida única M (Maintenance phase) fase de mantenimiento M (Muscle relaxation) relajación muscular O (Open- loop) lazo abierto P Proporcional PI Sistema controlador Proporcional, Integral y Derivativo R (Recover y phase) fase de recuperación SI Controlador PID de simple entrada y simple salida S Controlador MIMO-PID con sinergia Con el listado de variables se pretende que el lector tenga una rápida y fácil familiarización con sus nombres, conceptos que definen y su ubicación en las figuras. Las variables referenciadas en negrita y entre [corchetes] definen matrices, las referenciadas solo en n egrita definen vectores columna (se realiza una transposición para facilitar su escritura e interpretación) , las referenciadas en itática y sin negrita definen variables escalares . A continuación, se relacionan las más importantes según el orden de aparición en la desc cripción: Nombre Definición de la variable y Vector de variables de monitorización (6) yi Monitor eBIS (6.1) Y2 Monitor eNOX (6.2) ys Monitor eNMB (6.3) Upt Vector de perfusión continua de fármacos anestésicos (5) Uptl Perfusión continua del ePPF (5.1) Upt2 Perfusión continua del eRMF (5.2) Upt3 Perfusión continua del eRCN (5.3) dsur Vector de actuaciones quirúrgicas (7) Uol Vector de perfusiones del protocolo manual (4) u0n Perfusión manual del ePPF (4.1) Uoí2 Perfusión manual del eRMF (4.2) Uol3 Perfusión manual del eRCN (4.3) d Vector de bolos manuales al inicio di Bolo manual ePPF Ó2 Bolo manual eRMF ds Bolo manual eRCN D Vector que contiene los bolos por unidad de masa de inducción Di Dosis ePPF D2 Dosis eRMF Ds Dosis eRCN rol Vector de perfusión de la IPh r0ti Perfusión de inducción de ePPF r0i2 Perfusión de inducción de eRMF r0i3 Perfusión de inducción de eRCN R Vector de perfusión constante en IPh Ri Perfusión constante de ePPF r 2 Perfusión eonstante de eRMF r 3 Perfusión eonstante de eRCN p Veetor de la disminueión de la perfusión en MPh Pl Disminueión de perfusión ePPF P2 Disminueión de perfusión eRMF P3 Disminueión de perfusión eRCN w Peso del paeiente yx Veetor de objetivos de las variables monitorizadas (8) Yti Objetivo sobre el eBIS (8.1) Yt2 Objetivo sobre el eNOX (8.2) Yt3 Objetivo sobre el eNMB (8.3) yf Veetor de variables filtradas de monitorizaeión (10) Yfi Filtrado del eBIS (10.1) Yf2 Filtrado del eNOX (10.2) Yf3 Filtrado del eNMB (10.3) fe Veetor de freeueneias de eorte fl Freeueneia de eorte del filtro eBIS f2 Freeueneia de eorte del filtro eNOX f3 Freeueneia de eorte del filtro eNMB N Coefieiente de filtrado PID ei Veetor de error de eontrol del eBIS (12) epi eBIS proporeional (12.1) 6/í eBIS integral (12.2) eD1 eBIS derivativo eF1 eBIS derivativo filtrado (12.3) e2 Veetor de error de eontrol del eNOX (13) eP2 eNOX proporeional (13.1) e /2 eNOX integral (13.2) eD2 eNOX derivativo eF2 eNOX derivativo filtrado (13.3) e3 Veetor de error de eontrol del eNMB (14) eP3 eNMB proporeional (14.1) e/3 eNMB integral (14.2) eD3 eNMB derivativo eF3 eNMB derivativo filtrado (14.3) ep Veetor de errores asimétrieos proporeionales epi eBIS proporcional (12.1) ep2 eNOX proporcional (13.1) ep3 eNMB proporcional (14.1) ei Vector de errores simétricos integrales en eBIS integral (12.2) el2 eNOX integral (13.2) el3 eNMB integral (14.2) eo Vector de errores asimétricos derivativos eD1 eBIS derivativo eD2 eNOX derivativo eD3 eNMB derivativo eF Vector de errores asimétricos derivativos filtrados eFi eBIS derivativo filtrado (12.3) eF2 eNOX derivativo filtrado (13.3) eF3 eNMB derivativo filtrado (14.3) [B] Matriz de asimetría en la acción proporcional P Vector de asimetría en la acción proporcional Pii Ponderación eBIS P22 Ponderación eNOX P33 Ponderación eNMB ythb Vector de umbrales que determinan el valor máximo de p ythbl Umbral p eBIS ythb2 Umbral p eNOX ythb3 Umbral p eNMB [G] Matriz de asimetría en la acción derivativa 1 Vector de asimetría en la acción derivativa 7ii Ponderación eBIS Y22 Ponderación eNOX /33 Ponderación eNMB ythg Vector de umbrales que determinan el valor máximo de 1 ythg1 Umbral 1 eBIS ythg2 Umbral 1 eNOX ythg3 Umbral 1 eNMB Up¡d Vector de perfusiones de control (15) Ui Perfusión de control de ePPF (15.1) u2 Perfusión de control de eRMF (15.2) U3 Perfusión de control de eRCN (15.3) [KP] Matriz de ganancias proporcionales KP Vector de ganancias proporcionales directas Kp¡ Vector de ganancias proporcionales relativo al fármaco i Kpu Ganancia proporcional relativa monitor j y al fármaco i [K, ] Matriz de ganancias integrales K, Vector de ganancias integrales directas K, ¡ Vector de ganancias integrales relativo al fármaco i Km Ganancia integral relativa monitor j y al fármaco j y monitor j [T, ] Matriz de tiempos de acción integral T, Vector de tiempos de acción integral directos T, ¡ Vector de tiempos de acción integral relativo al fármaco i T, j Tiempo de acción integral relativa monitor j y al fármaco i [Kd ] Matriz de ganancias derivativas k d Vector de ganancias derivativas directas Kd ¡ Vector de ganancias derivativas relativo al fármaco i Kdij Ganancia derivativa relativa monitor j y al fármaco i [Td ] Matriz de tiempos de acción derivativa Td Vector de tiempos de acción derivativa directos Td ¡ Vector de tiempos de acción derivativa relativo al fármaco i Tdíj Tiempo de acción derivativa relativa monitor j y al fármaco i [SYN] Matriz de sinergia de fármacos s¡ Vector de sinergias relativa al fármaco i Su Sinergia relativa al controlador C K0i Vector de ganancias sobre el vector de perfusiones del protocolo manual Km Ganancia que modula la perfusión del protocolo manual relativa al ePPF KoI2 Ganancia que modula la perfusión del protocolo manualrelativa al eRMF Koí3 Ganancia que modula la perfusión del protocolo manualrelativa al eRCN Ucr Vector de corrección (18) UCr1 Perfusión correctora del ePPF (18.1) UCr2 Perfusión correctora del eRMF (18.2) Ucr3 Perfusión correctora del ePPF (18.3) Yl o Vector de umbrales inferiores de activación de la corrección Li Umbral inferior relativo al eBIS - 2 Umbral inferior relativo al eNOX L3 Umbral inferior relativo al eNMB Yhi Vector de umbrales superiores de activación de la corrección H1 Umbral superior relativo al eBÍS h 2 Umbral superior relativo al eNOX H3 Umbral superior relativo al eNMB Usf Vector de control fiable (20) Usf1 Perfusión fiable del ePPF (20.1) Usf2 Perfusión fiable del eRMF (20.2) Usf3 Perfusión fiable del eRCN (20.3) Ulo Vector de límites inferiores de la perfusión de fármacos UL1 Límite inferior relativa al ePPF U¡_2 Límite inferior relativa al eRMF UL3 Límite inferior relativa al eRCN Uhi Vector de límites superiores de la perfusión de fármacos UH1 Límite superior relativa al ePPF UH2 Límite superior relativa al eRMF UH3 Límite superior relativa al eRCN Uc| Vector de perfusiones automáticas (22) UC\1 Perfusión automática del ePPF (22.1) UcI2 Perfusión automática del eRMF (22.2) UC\3 Perfusión automática del eRCN (22.3) umn Vector de resoluciones del sistema de bombas de perfusión continua Umn1 Resolución de la bomba del ePPF Umn2 Resolución de la bomba del eRMF Umn3 Resolución de la bomba del eRCN ti Tiempo de inicio de la ÍPh tm Tiempo de inicio de la Mph tr Tiempo de comienzo de la RPh Ts Tiempo de ejecución del método [ ]' Trasposición de vectores y matrices Con el listado de sistemas se pretende una rápida y fácil ubicación de los mismos tanto en las figuras como en su descripción. A continuación, se relacionan según el orden de aparición en la descripción: Sistema Subsistema (1) paciente (2.1) bomba de perfusión del fármaco hipnótico (ePPF) (2) sistema de bombas (2.2) bomba de perfusión del fármaco analgésico (eRMF) de perfusión (2.3) bomba de perfusión del fármaco relajante (eRCN) (3.1) monitor de la DOH (eBIS) (3) equipos de (3.2) monitor de la ANG (eNOX) monitorización (3.3) monitor de la MRX (eNMB) (24) sistema de control multi-PID con sinergia (SynPlD) (9.1) filtro de la hipnosis (9) banco de filtros (9.2) filtro de la nocicepción (9.3) filtro de la relajación muscular 28: generador de error de la DoH (11) generador de 29: generador de error de la ANG errores de control 30: generador de error de la MRX (16) controlador multivaria ble y con sinergia MIMO-PID, denotado por la matriz [PID] (25) subsistema de (25.1) SISO-PID eBIS-ePPF, denotado por la variable C11 control MISO-PID-ePPF, (25.2) SISO-PID eNOX-ePPF, denotado por la variable C12 denotado por el vector (25.3) SISO-PID eNMB-ePPF, denotado por la variable C13 Cl (26) subsistema de (26.1) SISO-PID eBIS-eRMF, denotado por la variable C2i control MISO-PID-eRMF, (26.2) SISO-PID eNOX-eRMF, denotado por la variable C22 denotado por el vector (26.3) SISO-PID eNMB-eRMF, denotado por la variable C23 C2 (27) subsistema de (27.1) SISO-PID eBIS-eRCN, denotado por la variable C31 control MISO-PID-eNMB, (27.2) SISO-PID eNOX-eRCN, denotado por la variable C32 denotado por el vector (27.3) SISO-PID eNMB-eRCN, denotado por la variable C33 C3 (19.1) subsistema de seguridad de la infusion del ePPF (19) sistema de (19.2) subsistema de seguridad de la infusion del eRMF seguridad (19.3) subsistema de seguridad de la infusion del eRCN (21.1) subsistema cuantificador de la infusion del ePPF (21) sistema (21.2) subsistema cuantificador de la infusion del eRMF cuantificador (21.3) subsistema cuantificador de la infusion del eRCN (23) sistema de conmutación La presente invención se refiere a un sistema para la multi-perfusión automática de fármacos con sinergia a pacientes por IV, que comprende: - un subsistema de bombas de perfusión (2) , configurado para suministrar al paciente (1) una cantidad de fármacos; - un subsistema de monitorización (3) , configurado para medir un conjunto de variables fisiológicas con información del estado del paciente; - un subsistema de control (24) , configurado para adaptar la cantidad suministrada de cada fármaco (5) por el subsistema de bombas de perfusión (2) , basado en una cantidad de perfusión inicial predeterminada (4) , unos valores objetivo de monitorización (8) , una realimentación (6) de las variables fisiológicas medidas y una sinergia entre los fármacos, donde el subsistema de control comprende: o un módulo generador de errores de control (11) configurado para calcular errores (12, 13, 14) basado en los valores objetivo de monitorización (8) y la realimentación de las variables fisiológicas medidas; o un controlador (16) configurado para determinar una perfusión de control (15) para cada uno de los fármacos basada en los errores (12, 13, 14) calculados por el módulo generador de errores de control (11) y la cantidad de perfusión inicial predeterminada (4) ; o un módulo de corrección (17) configurado para recibir las medidas del conjunto de variables fisiológicas desde el subsistema de monitorización (3) y modificar la perfusión de control (15) del controlador (16) , incrementando en función de un umbral superior o disminuyendo en función de un umbral inferior, dicha perfusión para conducir las variables fisiólogicas a un rango seguro preestablecido para las variables fisiológicas; y o un módulo de seguridad (19) configurado para recibir la perfusión de control (15) de cada fármaco y modificar dicha perfusión limitándola entre dos valores de perfusión, un límite inferior y otro límite superior, que aseguran la no hipermedicación para cada fármaco, lo que permite trabajar a las variables fisiológicas en un rango serguro. Adicionalmente, se contemplan en el subsistema de control unos modulos de protección frente a sobredosificación o infradosificación con los módulos de seguridad (19) y corrección (17) configurados para mantener la perfusión de fármacos en unos valores seguros. En una de las realizaciones de la invención, se divulga un sistema de multi-perfusión con sinergia de fármacos anestésicos con sinergia mediante control en CL MIMO-PID (SynPlD) aplicado en actos anestésicos vía IV, este sistema es multidimensional configurable a la cantidad de fármacos utilizados y configurable a la cantidad de variables de monitorización que se utilicen. El sistema se implementa en un dispositivo electrónico, donde se ejecutan los siguientes pasos: paso 1.- obtener un vector de variables de monitorización de hipnosis (DoH) , analgesia (ANG) y relajación muscular (MRX) , adicionalmente otras variables de monitorización pueden ser usadas. De ahora en adelante se refiere a ellos como vector de variables de monitorización (6) que pueden ser el BIS, NOX y NMB u otros monitores equivalentes denotados como eBIS, eNOX y eNMB, de la DoH, ANG y MRX, respectivamente. El valor del vector de variables de monitorización (6) depende principalmente de la perfusión de los fármacos con propiedades hipnóticas, analgésicas y /o bloqueantes musculares, como son el propofol (PPF) , el remifentanilo (RMF) y el rocuronio (RCN) , aunque fármacos equivalentes pueden ser usados denotados como ePPF, eRMF y eRCN, adicionalmente otros fármacos anestésicos pueden ser usados. De ahora en adelante se refiere a ellos como como fármacos o drogas anestésicas que se infusionan al paciente vía IV; estos conforman el vector de perfusión de fármacos anetstésicos (5) . El vector de perfusión de fármacos anestésicos (5) se administra al paciente (1) mediante un sistema de bombas de perfusión (2) . Los equipos de monitorización (3) recogen sobre el paciente (1) los efectos de los fármacos anestésicos y el vector de actuaciones quirúrgicas (7) del médico cirujano en una intervención; paso 2.- para los fármacos anestésicos considerados, calcular el vector de perfusión de fármacos anestésicos (5) mediante un sistema de control MIMO-PID on sinergia (SynPlD) (24) a partir del vector de variables de monitorización (6) , del vector de perfusiones del protocolo manual (4) y del vector de objetivos de las variables monitorizadas (8) ; paso 3.- proceder a la limpieza de ruido y artefactos del vector de variables de monitorización (6) mediante un banco de filtros (9) para obtener un vector de variables filtradas de monitorización (10) ; paso 4.- calcular los vectores de errores de control (12, 13, 14) mediante un generador de errores de control (11) a partir del vector de variables filtradas de monitorización (10) y del vector de objetivos de las variables monitorizadas (8) ; particularmente consiste en calcular el vector de error de control del monitor eBIS (12) mediante un generador de error de la DoH (28) a partir de la monitorización filtrada de la hipnosis mediante el monitor eBIS (10.1) y de su valor objetivo (8.1) ; calcular el vector de error de control del monitor eNOX (13) mediante un generador de error de la ANG (29) a partir de la monitorización filtrada de la ANG mediante el monitor eNOX (10.2) y de su valor objetivo (8.2) ; calcular el vector de error de control del monitor eNMB (14) mediante un generador de error de la RMX (30) a partir de la monitorización filtrada de la MRX mediante el monitor eNMB (10.3) y de su valor objetivo (8.3) ; paso 5.- calcular un vector de perfusiones de control (15) mediante un controlador multivariable y con sinergia MIMO-PID (16) , compuesto por tres subsistemas de control MISO-PID (25, 26, 27) a partir de los vectores de errores de control (12, 13, 14) y del vector de perfusiones del protocolo manual (4) . Cada perfusión de control PID está formada por la suma de una perfusión proporcional, una perfusión integral y una perfusión derivativa. paso 6.- calcular un vector de corrección (18) mediante un sistema corrector de perfusiones (17) a partir del vector de variables filtradas de monitorización (10) ; paso 7.- calcular un vector de control fiable (20) mediante un sistema de seguridad (19) a partir del vector de perfusiones de control (15) y del vector de corrección (18) ; paso 8.- calcular un vector de perfusiones automáticas (22) mediante un sistema cuantificador (21) a partir del vector de control fiable (20) ; paso 9.- definir el vector de perfusión de fármacos anestésicos (5) aplicado al paciente (1) mediante un sistema de conmutación (23) a partir del vector de perfusiones del protocolo manual (4) y del vector de perfusiones automáticas (22) calculadas por el sistema de control SynPID (24) ; paso 10.- calcular la perfusión de control del fármaco ePPF (15.1) mediante un subsistema de control MISO-PID-ePPF (25) compuesto de tres controladores SISO-PID (25.1, 25.2, 25.3) que relacionan la perfusión del fármaco ePPF con los vectores de errores de control (12, 13, 14) ; paso 11.- calcular la perfusión de control del fármaco eRMF (15.2) mediante un subsistema de control MISO-PID-eRMF (26) compuesto de tres controladores SISO-PID (26.1, 26.2, 26.3) que relacionan la perfusión del fármaco eRMF con los vectores de los errores de control (12, 13, 14) ; paso 12.- calcular la perfusión de control del fármaco eRCN (15.3) mediante un subsistema de control MISO-PID-eNMB (27) compuesto de tres controladores SISO-PID (27.1, 27.2, 27.3) que relacionan la perfusión del fármaco eRCN con los vectores de los errores de control (12, 13, 14) . El sistema de multi-perfusión de fármacos anestésicos con sinergia mediante control en CL MIMO-PID aplicado en actos anestésicos vía IV es denominado sistema de control SynPID. SynPID necesita varios tipos de información para obtener el vector de perfusión de fármacos anestésicos (5) sobre los pacientes, a continuación se detallan las acciones y cálculos que hay que hacer en cada paso descrito anteriormente. El paso 2) ejecutado por el sistema de control SynPID adicionalmente comprende adquirir la información: 2.1.- Medir el vector de variables de monitorización (6) , Donde y es el vector de variables de monitorización (6) ; y? es el monitor eBIS; y2 es el monitor eNOX; y3 es el monitor eNMB y el resto de componentes del vector desde y4 a yr son otras posibles incorporaciones de monitores. El superíndice T significa transposición del vector. 2.2.- Definir el vector de perfusiones del protocolo manual (4) conocido como protocolo médico manual en lazo abierto (OP) , Donde uo es el vector de perfusiones del protocolo manual (4) ; uol? es la perfusión del protocolo manual para el ePPF; uol2 es la perfusión del protocolo manual para el eRMF; uol3 es la perfusión del protocolo manual para el eRCN y el resto de componentes del vector desde uol4 a uols son otras posibles decisiones de otros fármacos incorporados al sistema. 2.3.- Calcular el vector de perfusiones del protocolo manual (4) en OP, uol (0 = d (t, -) + rol ( / ) , [2. 3] 2.3.1.- Donde d es el vector de bolos manuales en el momento de iniciarse el IPh en el tiempo t, D = [A D2 ... Ds] \ Donde D es el vector que contiene los bolos por unidad de masa de cada fármaco; W es el peso del paciente y Ts es el periodo de ejecución. 2.3.2.- Donde ro es el vector de perfusión de los fármacos anestésicos en IPh, r nx [2. 5] R = K r 2 - RA p = [^i r 2 - p.Y ' Donde R es el vector de perfusión constante en IPh, desde t¡ donde comienza la IPh hasta tm donde comienza la MPh de la anestesia; P es el vector de la disminución de la perfusión en MPh; y W es el peso del paciente. 2.4.- Fijar el vector de objetivos de las variables monitorizadas (8) , Donde yT es el vector de objetivos de las variables monitorizadas (8) ; yT1 es el objetivo sobre el monitor eBIS; y2 es el objetivo sobre el monitor eNOX; y3 es el objetivo sobre el monitor eNMB y el resto de componentes del vector desde y4 a yr son otros posibles objetivos sobre las nuevas incorporaciones de monitores al método. El paso 3) ejecutado en el sistema de control SynPID adicionalmente comprende un banco de filtros (9) para: 3.1.- Calcular el vector de variables filtradas de monitorización (10) , Donde yf es el vector de variables filtradas de monitorización; yf1 es el filtrado del monitor eBIS; yf2 es el filtrado del monitor eNOX; yf3 es el filtrado del monitor eNMB y el resto de componentes del vector desde yf4 a yfr son los filtrados sobre las nuevas incorporaciones de monitores al sistema. 3.2.- Definir un banco de filtros (9) , basados en filtros paso bajo de orden nH, Donde y es el vector de variables de monitorización (6) ; yf es el vector de variables filtradas de monitorización (10) ; nH es el orden del filtro; fc es el vector de frecuencias de corte del banco de filtros (9) dada por, [3. 3] fc = [ f l f2 f r ] Donde fc es el vector de frecuencias de corte; f1 es la frecuencia de corte del filtro eBIS; f2 es la frecuencia de corte del filtro eNOX; f3 es la frecuencia de corte del filtro eNMB y el resto de componentes del vector desde f4 a fr son las frecuencias de corte del sistema de limpieza sobre las nuevas incorporaciones de filtros al sistema. El vector fc se calcula mediante la ecuación, fC = - r y üí .. [3. 4] A r-\ Donde N es el coeficiente de filtrado PID; y TD es el vector de tiempos de acción derivativa directo. El paso 4) ejecutado en el sistema de control SynPlD adicionalmente comprende un generador de errores de control (11) para: 4.1.- Calcular un vector de error de control del monitor eBIS e1 (12) con el generador de error de la DoH (28) , un vector de error de control del monitor eNOX e2 (13) con el generador de error de la ANG (29) , y un vector de error de control del monitor eNMB e3 (14) con el generador de error de la RMX (30) , cada uno con sus componentes proporcional, integral y derivativa (12.1, 12.2, 12.3) , (13.1, 13.2, 13.3) y (14.1, 14.2, 14.3) . Los errores correspondientes desde e4 a er son los relativos a los nuevos monitores incorporados al sistema de control, e1 [ep1 e j 1 e F1 ]T [4. 1] el 2 eF 2 ] er [e Pi eír e» ]T Donde eP¡ se refiere al error asimétrico proporcional del PID; e¡¡ se refiere al error simétrico integral del PID; eF¡ se refiere al error derivativo filtrado del PID; y ¡ se refiere a un número entero comprendido entre 1 y r, para referenciar a la variable monitorizada. 4.2.- Calcular los errores asimétrico proporcional, simétrico integral y asimétrico derivativo de cada controlador SISO-PID, utilizando el vector yf de variables filtradas de monitorización (10) y el vector yT de objetivos de las variables monitorizadas (8) , Donde yT es el vector de objetivos de las variables monitorizadas (8) ; yf es el vector de variables filtradas de monitorización (10) ; I es la matriz identidad; Td es el vector de tiempos de acción derivativa directo y N es el coeficiente de filtrado PID. 4.2.1.-[B] es la matriz con la influencia del "weighting set point en la acción proporcional de los PIDs, se conoce también como la asimetría en el error proporcional, Donde f3¡¡ es el peso sobre el target de la acción proporcional j, [4. 4] Donde ythb es un vector de umbrales que determinan el valor máximo de p. 4.2.2.- G es la matriz con la influencia del "weighting set point en la acción derivativa de los PIDs; se conoce también como la asimetría en el error derivativo, Donde y¡¡ es el peso sobre el target de la acción derivativa j, [4. 6] Donde ythg es un vector de umbrales que determinan el valor máximo de y. 4.3.- Calcular el vector de error de control del monitor eBIS (12) mediante un generador de error de la DoH (28) a partir de la monitorización filtrada de la DoH mediante el monitor eBIS (10.1) y de su valor objetivo (8.1) , [4. 7] 4.4.- Calcular el error de control del monitor eNOX (13) mediante un generador de error de la ANG (29) a partir de la monitorización filtrada de la ANG mediante el monitor eNOX (10.2) y de su valor objetivo (8.2) , [4. 8] 4.5.- Calcular el vector de error de control del monitor eNMB (14) mediante un generador de error de la MRX (30) a partir de la monitorización filtrada de la RMX mediante el monitor eNMB (10.3) y de su valor objetivo (8.3) , [4. 9] El paso 5) ejecutado por el sistema de control SynPlD adicionalmente comprende un controlador multivariable y con sinergia MIMO-PID (16) para: 5.1.- Definir el vector de perfusiones de control (15) , [5' 1] Donde u1 es la perfusión de control del ePPF (15.1) ; u2 es la perfusión de control del eRMF (15.2) ; u3 es la perfusión de control del eRCN (15.3) y desde u4 a us las perfusiones de los nuevos fármacos que puedan incorporarse al sistema de control. 5.2.- Calcular el vector de perfusiones de control (15) mediante un controlador multivariable y con sinergia MIMO-PID (16) , los vectores de error de control de los monitores eBIS (12) , eNOX (13) y eNMB (14) y el vector de perfusiones del protocolo manual (4) , Up¡d = [ H D ]{S Y N ]+ K ol-uol, [5- 2] Donde: 5.2.1.- [PID] es la matriz de controladores SISO-PID que componen el controlador multivariable y con sinergia MIMO-PID (16) , Donde C¡¡ es el controlador SISO-PID relativo al monitor j y al fármaco /; Ci es el subsistema de control MISO-PID-ePPF; C2 es el subsistema de control MISO-PID-eRMF; y C3 es el subsistema de control MISO-PID-eNMB. Los C¡j están definidos por la matriz de ganancias proporcionales [KP]; la matriz de ganancias integrales [K|] y la matriz de ganancias derivativas [KD]: K p = diag ( [K p ]) [5. 7] K j = diag ( [K j ]) [5. 8] K D = diag ([K D ]) [5. 9] Donde KP¡¡ es la ganancia proporcional relativa monitor j y al fármaco /; K\¡¡ es la ganancia integral relativa monitor j y al fármaco /; y KD¡¡ es la ganancia derivativa relativa monitor j y al fármaco /; KPi es el vector de ganancias proporcionales relativas al fármaco /; KIi es el vector de ganancias integrales relativas al fármaco /; KDi es el vector de ganancias derivativas relativas al fármaco /; KP es el vector de ganancias proporcionales directas relativas al fármaco j y al monitor j; KI es el vector de ganancias integrales directas relativas al fármaco j y l monitor j; y KD es el vector de ganancias derivativas directas relativas al fármaco j y al monitor _/'. 5.2.2.-[SYN] es la matriz de sinergia de fármacos: Donde S, y es la sinergia relativa al controlador Q; S¡ es el vector de sinergias relativa al fármaco /. 5.2.3.- Koi es un vector de ganancias sobre el vector de perfusiones del protocolo manual (4) , [5. 11] Donde K0/1 es la ganancia que modula la perfusión del protocolo manual del ePPF (4.1) ; K0/2 es la ganancia que modula la perfusión del protocolo manual del eRMF (4.2) ; K0/3 es la ganancia que modula la perfusión del protocolo manual del eRCN (4.3) y desde Ka/4 a Ka/S son las ganancias que modulan las perfusiones del protocolo manual de los nuevos fármacos que puedan incorporarse al sistema de control; Donde yT es el vector de objetivos de las variables monitorizadas (8) ; yf es el vector de variables filtradas de monitorización (10) e yLO es el vector de umbrales inferiores de activación de la corrección. 5.3.- Definir los subsistemas de control MISO-PID (25, 26, 27) a partir de los vectores de los errores de control (12, 13, 14) y del vector de perfusiones del protocolo manual (4) , -| 3] Donde C¡¡ es el controlador PID relativo al monitor ¡ y al fármaco /; S¡¡ es la sinergia relativa al controlador C¡¡; y K0u es la ganancia aplicada a las perfusiones del protocolo manual del fármaco u0/i. 5.3.1.- Definir cada controlador SISO-PID (25.1....... 27.3) mediante los vectores de los errores de control (12, 13, 14) y las ganancias definidas en el paso 5.2.1, C = P + 1.. + D.. [5. 14] y y y y Donde / identifica el fármaco (15.i) y ¡ identifica el monitor (10.j) ; P¡¡ es la acción proporcional, l¡¡ es la acción integral y D¡¡ es la acción derivativa. 5.3.2.- Calcular la acción proporcional, integral y derivativa; P y ~ K Pij 'e Pj íy = K n j\e, jdT, [5. 15] deFj D = K Dy di Donde KP¡¡ es la ganancia proporcional asociada al medicamento / y al monitor¡; eP¡ el error proporcional relativo al monitor¡; K¡¡ la ganancia integral asociada al medicamento / y al monitor; e¡ el error integral relativo al monitor ¡; Kd¡¡ la ganancia derivativa asociada al medicamento / y al monitor; y eF¡ el error derivativo filtrado relativo al monitor ¡. El paso 6) ejecutado por el sistema de control SynPlD adicionalmente comprende un sistema corrector de perfusiones (17) para: 6.1.- Definir el vector de corrección (18) , ucr = \ Lu cr , 1 u cr .2 ... u crs 1 JT, [6-1] Donde ucr1 es la perfusión correctora del fármaco ePPF (18.1) ; ucr2 es la perfusión correctora del fármaco eRMF (18.2) ; ucr3 es la perfusión correctora del fármaco eRCN (18.3) ; y el resto de componentes del vector desde ucr4 a ucrs son otras posibles correcciones de otros fármacos incorporados al sistema. 6.2.- Calcular el vector de corrección (18) a partir del vector de variables filtradas de monitorización (10) , Donde [KP] es la matriz de ganancias proporcionales, ecuación [5. 4]; [SYN] es la matriz de sinergia, ecuación [5. 10]; yf es el vector de variables filtradas de monitorización (10) . 6.2.1.- yHi es el vector de umbrales superiores de activación de la corrección, H 2 ... H r f [6.3] Donde H1 es el umbral superior relativo al monitor eBIS; H2 es el umbral superior relativo al monitor eNOX; H3 es el umbral superior relativo al monitor eNMB; y el resto de componentes de los vectores desde H4 hasta Hr son los umbrales superiores de otras posibles incorporaciones de monitores al sistema. 6.2.2.- yLO es el vector de umbrales inferiores de activación de la corrección, y lo = [A h ... l , ] 1 I6- 4! Donde L1 es el umbral inferior relativo al monitor eBIS; L2 es el umbral inferior relativo al monitor eNOX; L3 es el umbral inferior relativo al monitor eNMB; y el resto de componentes de los vectores desde L4 hasta Lr son los umbrales inferiores de otras posibles incorporaciones de monitores al sistema. El paso 7) del sistema de control SynPlD adicionalmente comprende de un sistema de seguridad (19) para: 7.1.- Definir el vector de control fiable (20) , Donde usf1 es la perfusión fiable del fármaco ePPF (20.1) ; usf2 es la perfusión fiable del fármaco eRMF (20.2) ; usf3 es la perfusión fiable del fármaco eRCN (20.3) ; y el resto de componentes del vector desde usf4 a usfs son otras posibles perfusiones fiables de otros fármacos incorporados al sistema. 7.2.- Calcular el vector de control fiable (20) a partir del vector de perfusiones de control (15) y del vector de corrección (18) , UHI Upid + Ucr ^ UHI u u pid ^ U cr ? U LO < U pid + U cr ^ U H1 [1] [7.2] ULO Upid + Ucr ^ ULO Donde ucr es el vector de corrección (18) y up¡d es el vector de perfusiones de control (15) . 7.2.1.- uHi es el vector de límites superiores de la perfusión de fármacos, Donde uH1 es límite superior de la perfusión relativa al fármaco ePPF; uH 2 e límite superior de la perfusión relativa al fármaco eRMF; uH3 es límite superior de la perfusión relativa al fármaco eRCN; y el resto de componentes de los vectores desde uH4 hasta uHs son los límites superiores de las perfusiones relativas a otras posibles incorporaciones de fármacos al sistema. 7.2.2.- Ulo es el vector de límites inferiores de la perfusión de fármacos, Donde uL1 es el límite inferior de la perfusión relativa al fármaco ePPF; uL2 es el límite inferior de la perfusión relativa al fármaco eRMF; uL3 es el límite inferior de la perfusión relativa al fármaco eRCN; y el resto de componentes de los vectores desde uL4 hasta uLs son los límites inferiores de las perfusiones relativas a otras posibles incorporaciones de fármacos al sistema. El paso 8) ejecutado por el sistema de control SynPiD adicionalmente comprende un sistema cuantificador (21) para: 8.1.- Definir el vector de perfusiones automáticas (22) , Ucl=k/1 Ucl2 ••• UclS Í> [8' 1] Donde uc11 es la perfusión automática del fármaco ePPF (22.1) ; uc2 es la perfusión automática del fármaco eRMF (22.2) ; uc3 es la perfusión automática del fármaco eRCN (22.3) ; y el resto de componentes del vector desde uc4 a ucs son otras posibles perfusiones automáticas en CL de otros fármacos incorporados al sistema. 8.2.- Calcular el vector de perfusiones automáticas (22) a partir del vector de control fiable (20) , ucl = round f « » f ^ u [8. 2] V Umn y Donde usf es el vector de control fiable (20) y umn es el vector de resoluciones del sistema de bombas de perfusión continua (2) ; 8.2.1.- umin es el vector de resoluciones de cada bomba de perfusión de fármacos; Donde umn1 es resolución bomba de perfusión ePPF; umn2 es resolución bomba de perfusión eRMF; umn3 es la resolución bomba de perfusión eRCN; y el resto de componentes del vector desde umn4 a umns son las resoluciones de otras posibles bombas de perfusión de nuevos fármacos incorporados al sistema de control. El paso 9) ejecutado por el sistema de control SynPlD adicionalmente comprende un sistema de conmutación (23) para: 9.1.- Definir el vector de perfusión de fármacos anestésicos (5) , Donde uptí es la perfusión del fármaco ePPF (5.1) ; upt2 es la perfusión continua del fármaco eRMF (5.2) ; upt3 es la perfusión del fármaco eRCN (5.3) ; y el resto de componentes del vector desde upt4 a upts son otras posibles perfusiones de nuevos fármacos incorporados al sistema de control. 9.2.- Calcular el vector de perfusión de fármacos anestésicos (5) a partir del vector de perfusiones del protocolo manual (4) y el vector de perfusiones automáticas (22) , Donde uo es el vector de perfusiones del protocolo manual (4) ; ud es el vector de perfusiones automáticas (22) ; t¡ es el tiempo de inicio de la lPh; tm es el tiempo de inicio de la MPh; y tr es el tiempo de comienzo de la RPh. El paso 10) ejecutado por el sistema de control SynPlD adicionalmente comprende de un subsistema de control MlSO-PlD-ePPF (25) para: 10.1.- Definir el subsistema de control MlSO-PlD-ePPF (25) como un conjunto de controladores 10.2.- Calcular la perfusión de control del ePPF (15.1) ; a partir de los controladores SlSO-PlD (25.1, 25, .2, 25.3) , de los vectores de los errores de control (12, 13, 14) y de la perfusión de ePPF del protocolo manual (4.1) , u i Ci ^ i + K 0i i 'U0ii [10. ul Cu mSl ¡ + C12 'Sl2 + • • • + Clr -Slr + K oñ uoll 2] Donde Si es un vector formado por la primera fila de [SYN]; Cy es el controlador PlD relativo al monitor ¡ y al fármaco ePPF; Sy es un vector formado por la sinergia relativa al controlador Cy; y Koy es la ganancia aplicada a la perfusión del protocolo manual del ePPF. El paso 11) ejecutado por el sistema de control SynPlD adicionalmente comprende de un subsistema de control MlSO-PlD-eRMF (26) para: 11.1.- Definir el subsistema de control MlSO-PlD-eRMF (26) como un conjunto de controladores 11.2.- Calcular la perfusión de control del eRMF (15.2) ; a partir de los controladores SlSO-PlD (26.1, 26, .2, 26.3) , de los vectores de los errores de control (12, 13, 14) y de la perfusión de eRMF del protocolo manual (4.2) , Donde S2 es un vector formado por la segunda fila de [SYN]; C2¡ es el controlador PlD relativo al monitor j y al fármaco eRMF; S2y es un vector formado por la sinergia relativa al controlador C2¡; y K02 es la ganancia aplicada a la perfusión del protocolo manual del eRMF. El paso 12) ejecutado por el sistema de control SynPlD adicionalmente comprende de un subsistema de control MlSO-PlD-eNMB (27) para: 10.1.- Definir el subsistema de control MlSO-PlD-eNMB (27) como un conjunto de controladores SlSO-PlD, 12.2.- Calcular la perfusión de control del eRCN (15.3) ; a partir de los controladores SISO-PID (27.1, 27, .2, 27.3) , de los vectores de los errores de control (12, 13, 14) y de la perfusión de eRCN del protocolo manual (4.3) , U3 C3 '83 + K 0¡ 3 'Uol 3 [12.2] u3 = C31 ~S3l + C32 'S32 + ... + C3.- S3r + K 0¡3 nol3 Donde S3 es un vector formado por la tercera fila de [SYN]; C3¡ es el controlador PID relativo al monitor j y al fármaco eRCN; S3¡ es la sinergia relativa al controlador C3; y K03 es la ganancia aplicada a la perfusión del protocolo manual del eRCN. El paso 13) ejecutado por el sistema de control SynPlD adicionalmente puede comprender de varios controladores MISO-PID para nuevos fármacos: 13.1.- Definir el controlador MISO-PID para el fármaco i como un conjunto de controladores SISO-PID, Donde i=4...s, identifica los nuevos fármacos; y r identifica el número de monitores. 13.2.- Calcular la perfusión de control del fármaco i; a partir de los controladores SISO-PID, de los errores de control y de la perfusión del fármaco i del protocolo manual (4.i) , [13.2 ] U C 8 + K iliU, En otro aspecto de la invención, se divulga un dispositivo de multi-perfusión de fármacos anestésicos con sinergia mediante control en CL MIMO-PID (SynPID) aplicado en actos anestésicos vía IV, este método es multidimensional configurable a la cantidad de fármacos utilizados y a la cantidad de variables de monitorización que se utilicen, en una cualquiera de las realizaciones del primer aspecto de la invención. El dispositivo de multi-perfusión de fármacos anestésicos con sinergia mediante control en CL MIMO-PID (SynPID) aplicado en actos anestésicos vía IV comprende al menos un banco de filtros (9) ; un generador de errores de control (11) ; un controlador multivariable y con sinergia MIMO-PID (16) ; un sistema corrector de perfusiones (17) ; un sistema de seguridad (19) ; un sistema cuantificador (21) ; y un sistema de conmutación (23) . El dispositivo de multi-perfusión de fármacos anestésicos con sinergia mediante control en CL MIMO-PID (SynPlD) aplicado en actos anestésicos vía IV puede ser un dispositivo electrónico o electromecánico. BREVE DESCRIPCIÓN DE LOS DIBUJOS Figura 1.- Muestra la topología del sistema de control SynPlD (24) en su forma más general en la que se detalla el paciente (1) , al que se le suministra el vector de perfusión de fármacos anestésicos (5) a través de un sistema de bombas de perfusión (2) y del que se extraen las medidas del vector de variables de monitorización (6) a través de los equipos de monitorización (3) . Las bombas de perfusión controlan los fármacos ePPF (2.1) , eRMF (2.2) y eRCN (2.3) . Los equipos de monitorización (3) recogen información de las siguientes variables: 1) DoH (3.1) mediante el monitor eBIS (6.1) ; 2) ANG (3.2) mediante el monitor eNOX (6.2) ; y 3) MRX (3.3) mediante el monitor eNMB (6.3) . El vector de variables de monitorización (6) es la base de realimentación del sistema de control SynPlD (24) , que además utiliza la información sobre: 1) el vector de objetivos de las variables monitorizadas (8) : target del eBIS (8.1) , target del eNOX (8.2) y target del eNMB (8.3) ; y 2) el vector de perfusiones del protocolo manual (4) : protocolo manual del ePPF (4.1) , protocolo manual del eRMF (4.2) y protocolo manual del eRCN (4.3) . Figura 2.- Muestra un detalle pormenorizado del sistema de control SynPID (24) que presenta como entradas los vectores de: 1) el vector de perfusiones del protocolo manual (4) ; 2) el vector de objetivos de las variables monitorizadas (8) ; y 3) los valores del vector de variables de monitorización (6) . El sistema de control SynPID (24) está compuesto por: 1) un banco de filtros (9) para obtener un vector de variables filtradas de monitorización (10) a partir del vector de variables de monitorización (6) ; el banco de filtros (9) está compuesto por tres filtros uno para limpiar y filtrar el eBIS (9.1) , otro para limpiar y filtrar el eNOX (9.2) y otro para limpiar y filtrar el eNMB (9.3) ; 2) un generador de errores de control (11) para obtener los vectores de los errores de control (12, 13, 14) a partir del vector de variables filtradas de monitorización (10) y del vector de objetivos de las variables monitorizadas (8) ; particularmente consiste en obtener el vector de error de control del monitor eBIS (12) ; obtener el vector de error de control del monitor eNOX (13) y obtener el vector de error de control del monitor eNMB (14) ; 3) un controlador multivariable y con sinergia MIMO-PID (16) para obtener un vector de perfusiones de control (15) a partir de los vectores de los errores de control (12, 13, 14) y del vector de perfusiones del protocolo manual (4) ; 4) un sistema corrector de perfusiones (17) para obtener un vector de corrección (18) a partir del vector de variables filtradas de onitorización (10) ; 5) un sistema de seguridad (19) obtener un vector de control fiable (20) a partir del vector de perfusiones de control (15) y del vector de corrección (18) ; 6) un cuantificador (21) para obtener un vector de perfusiones automáticas (22) a partir del vector de control fiable (20) ; y 7) un sistema de conmutación (23) para obtener el vector de perfusión de fármacos anestésicos (5) a partir del vector de perfusiones del protocolo manual (4) y del vector de perfusiones automáticas (22) . Figura 3.- Muestra un detalle pormenorizado del generador de errores de control (11) que presenta como entradas los vectores de: 1) el vector de objetivos de las variables monitorizadas (8) ; y 2) el vector de variables filtradas de monitorización (10) . El generador de errores de control (11) está compuesto por: 1) un generador de error de la DoH (28) donde se obtiene el vector de error de control del monitor eBIS (12) , donde se explicitan el error proporcional eBIS (12.1) , el error integral eBIS (12.2) y el error derivativo eBIS (12.3) , a partir de la monitorización filtrada de la DoH mediante el monitor eBIS (10.1) y de su valor objetivo (8.1) ; 2) un generador de error de la ANG (29) donde se obtiene el vector de error de control del monitor eNOX (13) , donde se explicitan el error proporcional eNOX (13.1) , el error integral eNOX (13.2) y el error derivativo eNOX (13.3) , a partir de la monitorización filtrada de la ANG mediante el monitor eNOX (10.2) y de su valor objetivo (8.2) ; y 3) un generador de error de la MRX (30) donde se obtiene el vector de error de control del monitor eNMB (14) , donde se explicitan el error proporcional eNMB (14.1) , el error integral eNMB (14.2) y el error derivativo eNMB (14.3) , a partir de la monitorización filtrada de la MRX mediante el monitor eNMB (10.3) y de su valor objetivo (8.3) . Figura 4.- Muestra un detalle pormenorizado del controlador multivariable y con sinergia MIMO-PID (16) que presentan como entradas los vectores de los errores de control (12, 13, 14) y del vector de perfusiones del protocolo manual (4) . El controlador multivariable y con sinergia MIMO-PID (16) está compuesto por varios subsistemas de control MISO-PID (25, 26, 27) que relacionan los vectores de los errores de control (12, 13, 14) con el vector de perfusiones de control (15) . Figura 5.- Muestra un detalle pormenorizado del controlador MISO-PID (25) relacionado con la perfusión del fármaco ePPF (15.1) que presenta como entradas los vectores de los errores de control (12, 13, 14) . El subsistema de control MISO-PID-ePPF (25) está compuesto por tres controladores SISO-PID que relacionan la perfusión del fármaco ePPF con: 1) el vector del error de control relativo al eBIS (12) mediante un controlador PID eBIS-ePPF (25.1) ; 2) el vector del error de control relativo al eNOX (13) mediante un controlador PID eNOX-ePPF (25.2) ; y 3) el vector del error de control relativo al eNMB (14) mediante un controlador PID eNMB-ePPF (25.3) . Figura 6.- Muestra un detalle pormenorizado del subsistema de control MISO-PID-eRMF (26) relacionado con la perfusión del fármaco eRMF (15.2) que presenta como entradas los vectores de los errores de control (12, 13, 14) . El subsistema de control MISO-PID-eRMF (26) está compuesto por tres controladores SISO-PID que relacionan la perfusión del fármaco eRMF con: 1) el vector del error de control relativo al eBIS (12) mediante un controlador PID eBIS-eRMF (26.1) ; 2) el vector del error de control relativo al eNOX (13) mediante un controlador PID eNOX-eRMF (26.2) ; y 3) el vector del error de control relativo al eNMB (14) mediante un controlador PID eNMB-ePPF (26.3) . Figura 7.- Muestra un detalle pormenorizado del subsistema de control MISO-PID-eNMB (27) relacionado con la perfusión del fármaco eRCN (15.3) que presenta como entradas los vectores de los errores de control (12, 13, 14) . El subsistema de control MISO-PID-eNMB (27) está compuesto por tres controladores SISO-PID que relacionan la perfusión del fármaco eRCN con: 1) el vector del error de control relativo al eBIS (12) mediante un controlador PID eBIS-eRCN (27.1) ; 2) el vector del error de control relativo al eNOX (13) mediante un controlador PID eNOX-eRCN (27.2) ; y 3) el vector del error de control relativo al eNMB (14) mediante un controlador PID eNMB-eRCN (27.3) . Figura 8.- Muestra un detalle pormenorizado de uno de los 9 controladores SISO-PID (C¡j) que componen el sistema de control SynPID (24) , cada controlador SISO-PID presenta como entradas los correspondientes errores proporcional (k.1) , integral (k.2 ) y derivativo (k.3) , relativo a cada componente de cada vector de error de control (ey) . Cada controlador SISO-PID se identifica con los subíndices ¡ que identifica el fármaco al que se está calculado la perfusión parcial, y j que identifica la procedencia del monitor. Así ¡'=1 identifica el PPF, ¡=2 el RMF e ¡=3 el RCN, j'=1 identifica el monitor BIS, j=2 el NOX y j'=3 el NMB, k=12 identifica el vector de error relativo al monitor BIS, k=13 el relativo al NOX y k=14 al NMB. DESCRIPCIÓN DETALLADA DE LA INVENCIÓN La presente invención aporta a la técnica varias estrategias de complemento al controlador PID en CL para que sea efectivo en el control en CL de la inducción y mantenimiento de la anestesia general, calculando la dosis de los fármacos ePPF, eRMF y eRCN en base a un vector de errores de control. El control en CL es obtenido de forma novedosa por la consideración de la sinergia de los fármacos en el acto anestésico y por la realimentación de la información de monitorización de la DoH, ANG y MRX (otras variables pueden ser consideradas) mediante los monitores eBIS, eNOX y eNMB respectivamente (otros monitores pueden ser considerados) . Los cambios en los valores de los monitores son originados principalmente por el efecto de los fármacos y las actuaciones de la cirugía. Además, las perfusiones de los fármacos están condicionadas por un sistema de seguridad para salvaguardar la integridad física del paciente y están complementadas por un sistema de corrección de perfusiones que el PID clásico no posee. Presenta entre sus novedades la consideración de la sinergia entre los fármacos en un multicontrolador PID, asimetría en los errores de control, corrección de la perfusión por niveles excepcionalmente bajos o altos en los monitores, seguridad ante la sobreperfusión mediante limites fijos o variables de la perfusión de fármacos y mediante suspensión de las bombas, seguridad ante infraperfusión por condicionantes relacionados con la experiencia manual del anestesiólogo (protocolo manual OL) . Finalmente, la decisión final sobre las perfusiones se condiciona con un cuantificador para adecuar las perfusiones a las resoluciones de las bombas electromecánicas de perfusión. El objetivo final es realizar un cálculo automático de las perfusiones de ePPF, eRMF y eRCN que se aplicaría directamente a un paciente bajo cirugía con anestesia general, que sería el usuario final de la presente invención. La invención que se propone tiene entre sus novedades la definición de un nuevo sistema de perfusión de fármacos anestésicos con un sistema de control SynPlD, formado por un banco de filtros, un generador de errores asimétricos de control, un controlador MIMO-PID, un sistema de corrección, un sistema de seguridad y un sistema de cuantificación que pueda aplicarse al paciente bajo cirugía, pues tiene en cuenta: 1) la monitorización de la DoH, ANG y MRX mediante monitores eBIS, eNOX y eNMB; 2) las bombas de perfusión de los fármacos ePPF, eRMF y eRCN; y 3) el uso de un dispositivo electrónico que utilice un microprocesador y una memoria de almacenamiento. Adicionalmente, para estimar las perfusiones automáticas sobre el paciente el sistema de control en CL considera las perfusiones de fármacos previas en el momento de actuación y considera las medidas sobre los monitores actuales y pasadas. El sistema de perfusión continua de fármacos ePPF, eRMF y eRCN con sistema de control SynPlD es un método de control que requiere de la experiencia manual del anestesiólogo (protocolo manual OL) y está personalizado para cada paciente utilizando una variante del método empírico de ajuste de Cohen-Coon a través de las ganancias proporcional, integral y derivativa de cada controlador SISO-PID, del peso del paciente (W) , de su altura (H) , de su sexo (G) y de su masa muscular (MB) . El método de personalización se aplica durante la IPh de la anestesia general. El sistema de control SynPlD (24) propone el vector de perfusión de fármacos anestésicos (5) , como resultado de la aplicación del sistema de conmutación (23) , que inicialmente aplica el vector de perfusiones del protocolo manual (4) en la IPh, para conmutar al vector de perfusiones automáticas (22) en MPh y anular la perfusión en RPh. El sistema de control SynPlD (24) tiene como objetivo principal conducir al paciente (1) a un estado anestésico satisfactorio y fiable en función de: 1) el estado anestésico actual; 2) el vector de variables de monitorización (6) actual y/o pasados (histórico almacenado en la memoria) ; y 3) el vector de perfusión de fármacos anestésicos (5) de instantes pasados (histórico almacenado en la memoria) . La invención consiste en la propuesta de un sistema electrónico en el se ejecute un algoritmo de control realimentado definido por un sistema de control SynPlD (24) basado en un controlador multivariable y con sinergia MIMO-PID (16) que define el sistema de control multivariable para realizar el control de un estado anestésico fiable en pacientes (1) sometidos a cirugía bajo anestesia general. El sistema de control SynPID se implementa en un sistema basado en microprocesador con memoria seleccionado entre: "smartphones", "tablets", ordenadores personales, arduino, raspberr y -PI y un hardware específico para la ejecución del método o emplear el hardware propio de las bombas de perfusión para ejecutar la secuencia de instrucciones que implementarían el método de perfusión de fármacos en un sistema de control SynPID descrito en la presente invención. El sistema de perfusión de fármacos con sinergia mediante control en CL MIMO-PID (SynPID) aplicado en actos anestésicos vía IV de la presente invención difiere de los métodos del estado de la técnica basados en PIDs clásicos en al menos los siguientes aspectos: - El sistema de control SynPID utiliza tres fases de control controladas por el sistema de conmutación (23) : 1) IPh, eta fase correspondiente al inicio del acto nestésico y dura hasta conseguir un estado anestésico satisfactorio, durante este periodo solo el vector de perfusiones del protocolo manual (4) está aplicado al paciente (1) , el final de este periodo se utiliza para la personalización del sistema de control SynPlD (24) al paciente (1) ; 2) MPh, en esta fase es donde ocurre la cirugía y el objetivo del sistema de control SynPlD es mantener el estado anestésico satisfactorio, a pesar de los actos quirúrgicos; y 3) RPh, en esta fase se retiran las perfusiones de los fármacos para conseguir reanimar al paciente. - El sistema de control SynPlD utiliza un banco de filtros (9) para eliminar el ruido y los artefactos del vector de variables de monitorización (6) y obtener el vector de monitorización filtrado. El banco de filtros (9) está basado en una limpieza espectral y en la toma de decisiones en función de unas condiciones de monitorización. - El sistema de control SynPlD utiliza un generador de errores de control (11) relativos a los monitores eBIS, eNOX y eNMB que componen el vector de variables de monitorización (6) , los errores son asimétricos y están definidos por una modulación del vector de objetivos de las variables monitorizadas (8) y el vector de variables filtradas de monitorización (10) . El vector de actuaciones quirúrgicas (7) se reflejan en el paciente (1) a través de variaciones en el vector de variables de monitorización (6) . - El sistema de control SynPlD utiliza un vector de perfusiones de control (15) formado por perfusiones de los fármacos ePPF (15.1) , eRMF (15.2) y eRCN (15.3) . Cada perfusión de fármacos está definida por la acción de un sistema de control MlSO-PlD compuesta por la suma de tres acciones de control relativas a tres controladores SlSO-PlD. - La perfusión de ePPF (15.1) se calcula mediante la suma de: 1) un controlador SlSO-PlD (25.1) que relaciona una parte de la perfusión de control del ePPF con el vector de error de control del monitor eBlS (12) , formado por una componente proporcional (12.1) , una componente integral (12.2) y una componente derivativa (12.3) ; 2) un controlador SlSO-PlD (25.2) que relaciona una parte de la perfusión de control del ePPF con el vector de error de control del monitor eNOX (13) , formado por una componente proporcional (13.1) , una componente integral (13.2) y na componente derivativa (13.3) ; y 3) un controlador SISO-PID (25.3) que relaciona una parte de la perfusión de control del ePPF con el vector de error de control del monitor eNMB (14) , formado por una componente proporcional (14.1) , una componente integral (14.2) y una componente derivativa (14.3) ; - La perfusión de eRMF (15.2) se calcula mediante la suma de: 1) un controlador SISO-PID (26.1) que relaciona una parte de la perfusión de control del eRMF con el vector de error de control del monitor eBIS (12) , formado por una componente proporcional (12.1) , una componente integral (12.2) y una componente derivativa (12.3) ; 2) un controlador SISO-PID (26.2) que relaciona una parte de la perfusión de control del eRMF con el vector de error de control del monitor eNOX (13) , formado por una componente proporcional (13.1) , una componente integral (13.2) y una componente derivativa (13.3) ; y 3) un controlador SISO-PID (26.3) que relaciona una parte de la perfusión de control del eRMF con el vector de error de control del monitor eNMB (14) , formado por una componente proporcional (14.1) , una componente integral (14.2) y una componente derivativa (14.3) ; - La perfusión de eRCN (15.3) se calcula mediante la suma de: 1) un controlador SISO-PID (27.1) que relaciona una parte de la perfusión de control del eRCN con el vector del error de control del monitor eBIS (12) , formado por una componente proporcional (12.1) , una componente integral (12.2) y una componente derivativa (12.3) ; 2) un controlador SISO-PID (27.2) que relaciona una parte de la perfusión de control del eRCN con el vector de error de control del monitor eNOX (13) , formado por una componente proporcional (13.1) , una componente integral (13.2) y una componente derivativa (13.3) ; y 3) un controlador SISO-PID (27.3) que relaciona una parte de la perfusión de control del eRCN con el vector de error de control del monitor eNMB (14) , formado por una componente proporcional (14.1) , una componente integral (14.2) y una componente derivativa (14.3) ; - El sistema de control SynPlD (24) utiliza 9 controladores SISO-PID, agrupados en tres subsistemas de control MISO-PID (figuras 5, 6 y 7) , cada controlador SISO-PID (C¡j ) (figura 8 ) utiliza para calcular la perfusión del fármaco i (15.i) : - Un sistema de acción proporcional (i.j.1) que define a su salida la acción de perfusión proporcional (15.i.1) , a partir de su entrada que es el error asimétrico proporcional de control (fr.1) . - Un sistema de acción integral (i.j.2) que define a su salida la acción de perfusión integral (15.i.2) , a partir de su entrada que es el error simétrico integral de control ( .^2 ) . - Un sistema de acción derivativa (/'._/'.3) que define a su salida la acción de perfusión derivativa (15.i.3) , a partir de su entrada que es el error asimétrico derivativo de control ( .^3) . - El sistema de control SynPID (24) utiliza un sistema corrector de perfusiones (17) , que compensa el vector de perfusiones de control (15) con el vector de corrección (18) que están definidas por las desviaciones del vector de variables filtradas de monitorización (10 ) respecto de unos vectores de umbrales superior e inferior. Estas desviaciones consideradas no han podido ser corregidas por el control multivariable basado en PIDs (24) . - El sistema de control SynPID (24) utiliza un sistema de seguridad (19) , que condiciona el vector de perfusiones de control (15) compensado por el vector de corrección (18) para conducir al vector de control fiable (20 ) , lo que evita la sobreperfusión e infraperfusión, con ello se consigue evitar periodos de anestesia general profunda que compromete la vida del paciente o periodos de sedación lo que puede ocasionar despertares intraoperatorios. Para evitar la sobreperfusión se aplican las restricciones con el sistema de seguridad (19) para suspender el sistema de bombas de perfusión (2 ) y para evitar la infraperfusión se aplica el vector de corrección (18) . - El sistema de control SynPID (24) utiliza un sistema cuantificador (21) para que el vector de control fiable (20 ) sea interpretable por el sistema de bombas de perfusión (2) , que a través de varios catéteres infunden los fármacos vía IV dentro del cuerpo del paciente (1) que modificará su estado anestésico y que posteriormente, esas modificaciones serán recogidas por los equipos de monitorización (3) mediante el vector de variables de monitorización (6) . Los pasos para la multi-perfusión de fármacos anestésicos con sinergia mediante control en CL MIMO-PID (SynPlD) aplicado en actos anestésicos vía IV para la perfusión automática, ejecutables en un dispositivo electrónico, son los siguientes para cada momento de actuación: Paso 1: Medir el valor del vector de los monitores eBIS (6.1) , eNOX (6.2) y eNMB (6.3) que depende principalmente del vector de perfusión de los fármacos anestésicos ePPF (5.1) , eRMF (5.2) y eRCN (5.3) . Los fármacos anestésicos se administran al paciente (1) mediante un sistema de bombas de perfusión (2) . Los equipos de monitorización (3) recogen sobre el paciente los efectos de los fármacos anestésicos y del vector de actuaciones quirúrgicas (7) del médico cirujano en una intervención a través del vector de variables de monitorización (6) ; también otros factores pueden influir en el valor del vector de monitorización; la información del vector de variables de monitorización (6) y la decisión tomada sobre el valor del vector de perfusión de fármacos anestésicos (5) se almacena en una memoria; Paso 2: Calcular el vector de perfusión de los fármacos anestésicos ePPF (5.1) , eRMF (5.2) y eRCN (5.3) mediante un sistema de control SynPlD (24) a partir de la realimentación del valor del vector de los monitores eBIS (6.1) , eNOX (6.2) y eNMB (6.3) , del vector de perfusiones del protocolo manual relativas al ePPF (4.1) , al eRMF (4.2) y al eRCN (4.3) y del vector de los valores objetivo de variables monitorizadas relativas al eBIS (8.1) , al eNOX (8.2) y al eNMB (8.3) ; Paso 3: Proceder a la limpieza de ruido y artefactos del vector de los monitores eBIS (6.1) , eNOX (6.2) y eNMB (6.3) , mediante un sistema de limpieza y filtrado para el eBIS (9.1) , un sistema de limpieza y filtrado para el eNOX (9.2) y un sistema de limpieza y filtrado para el eNMB (9.3) , para obtener un vector de variables de monitorización filtrada del eBIS (10.1) , eNOX (10.2) y eNMB (10.3) ; Paso4: Calcular unos vectores de errores de control de los monitores al eBIS (12) , eNOX (13) y al eNMB (14) . El vector de error de control eBIS tiene tres omponentes un error asimétrico proporcional eBIS (12.1) , un error simétrico integral eBIS (12.2) y un error asimétrico derivativo eBIS (12.3) . El vector de error de control eNOX tiene tres componentes un error asimétrico proporcional eNOX (13.1) , un error simétrico integral eNOX (13.2) y un error asimétrico derivativo eNOX (13.3) . El vector de error de control eNMB tiene tres componentes un error asimétrico proporcional eNMB (14.1) , un error simétrico integral eNMB (14.2) y un error asimétrico derivativo eNMB (14.3) . Los vectores de los errores de control (12, 13, 14) se obtienen mediante un generador de errores de control (11) compuesto por un generador de error de la DoH (28) , un generador de error de la ANG (29) y un generador de error de la MRX (30) . El generador de error de la DoH (28) obtiene las tres componentes de error asimétrico proporcional eBIS (12.1) , simétrico integral eBIS (12.2) y asimétrico derivativo eBIS (12.3) a partir de la variable de monitorización filtrada del eBIS (10.1) y del valor objetivo del eBIS (8.1) . El generador de error de la ANG (29) obtiene las tres componentes de error asimétrico proporcional eNOX (13.1) , simétrico integral eNOX (13.2) y asimétrico derivativo eNOX (13.3) a partir de la variable de monitorización filtrada del eNOX (10.2) y del valor objetivo del eNOX (8.2) . El generador de error de la MRX (30) obtiene las tres componentes de error asimétrico proporcional eNMB (14.1) , simétrico integral eNMB (14.2) y asimétrico derivativo eNMB (14.3) a partir de la variable de monitorización filtrada del eNMB (10.3) y del valor objetivo del eNMB (8.3) . Los errores indicarán en el momento de su evaluación la desviación del vector de variables de monitorización (6) respecto del vector de objetivos de las variables monitorizadas (8) . Paso 5: Calcular un vector de perfusiones de control de fármacos de ePPF (15.1) , de eRMF (15.2) y de eRCN (15.3) mediante un controlador multivariable y con sinergia MIMO-PID (16) que presenta como entradas los vectores de errores de control (12, 13, 14) y el vector de perfusiones del protocolo manual (4) . El controlador multivariable y con sinergia MIMO-PID (16) está formado por tres subsistemas de control MISO-PID (25, 26, 27) , que a su vez cada uno está formado por tres controladores SISO-PID: 1) para obtener la perfusión de control del ePPF (15.1) se usan los controladores SISO-PID (25.1, 25.2, 25.3) ; 2) para obtener la perfusión de control del eRMF (15.2) se usan los controladores SISO-PID (26.1, 26.2, 26.3) ; y 3) para obtener la perfusión de control del eRCN (15.3) se usan los controladores SISO-PID (27.1, 27.2, 27.3) . Paso6 : Calcular un vector de corrección (18) formado por la perfusión correctora de ePPF (18.1) , la perfusión correctora de eRMF (18.2) y la perfusión correctora de eRCN (18.3) mediante un sistema corrector de perfusiones (17) que está formado por un subsistema de corrección de la perfusión del ePPF (17.1) , un subsistema de corrección de la perfusión del eRMF (17.2) y un subsistema de corrección de la perfusión del eRCN (17.3) a partir del vector de variables filtradas de monitorización (10) compuesto por la monitorización filtrada del eBIS (10.1) , la monitorización filtrada del eNOX (10.2) y la monitorización filtrada del eNMB (10.3) ; el vector de corrección (18) trata de compensar el vector de perfusiones de control (15) con el fin de evitar la infraperfusión para mitigar el efecto de la disminución de la DoH, ANG y MRX; el vector de corrección (18) se calcula en base a un vector de umbrales superior e inferior sobre el vector de variables filtradas de monitorización (10) ; Paso 7: Calcular un vector de control fiable (20) formado por la perfusión fiable de ePPF (20.1) , la perfusión fiable de eRMF (20.2) y la perfusión fiable de eRCN (20.3) mediante un sistema de seguridad (19) que está formado por un subsistema de seguridad de la perfusión del ePPF (19.1) , un subsistema de seguridad de la perfusión del eRMF (19.2) y un subsistema de seguridad de la perfusión del eRCN (19.3) a partir del vector de perfusiones de control (15) formado por la perfusión de control del ePPF (15.1) , la perfusión de control del eRMF (15.2) y la perfusión de control del eRCN (15.3) y a partir del vector de corrección (18) formado por la perfusión correctora de ePPF (18.1) , la perfusión correctora de eRMF (18.2) y la perfusión correctora de eRCN (18.3) ; el sistema de seguridad (19) trata de compensar el vector de perfusiones de control (15) para conducir al vector de control fiable (20) a un valor fiable para el paciente (1) y fiable para causar el efecto deseado en el paciente (1) , lo que evita la sobreperfusión e infraperfusión, con ello se consigue evitar periodos de anestesia general profunda que compromete la vida del paciente o periodos de sedación lo que puede ocasionar despertares intraoperatorios; para evitar la sobreperfusión se aplican unos vectores de restricción de suspensión del sistema de bombas de perfusión (2) y para evitar la infraperfusión se aplica el vector de corrección (18) ; Paso 8 : Calcular un vector de perfusiones automáticas (22) formado por la perfusión automática de ePPF (22.1) , la perfusión automática de eRMF (22.2) y la perfusión automática de eRCN (22.3) mediante un sistema cuantificador (21) que está formado por un subsistema de cuantificación de la perfusión del ePPF (21.1) , un subsistema de cuantificación de la perfusión del eRMF (21.2) y un subsistema de cuantificación de la perfusión del eRCN (21.3) a partir de un vector de control fiable (20) formado por la perfusión fiable de ePPF (20.1) , la perfusión fiable de eRMF (20.2) y la perfusión fiable de eRCN (20.3) ; el sistema cuantificador (21) modifica las perfusiones para que el vector de control fiable (20) sean interpretable por el sistema de bombas de perfusión (2) , compuesto por la bomba de ePPF (2.1) , la bomba de eRMF (2.2) y la bomba de eRCN (2.3) , que a través de varios catéteres infunden los fármacos vía IV dentro del cuerpo del paciente (1) ; Paso9: Definir el vector de perfusión de fármacos anestésicos (5) compuesto por la perfusión de ePPF (5.1) , la perfusión de eRMF (5.2) y la perfusión de eRCN (5.3) mediante un sistema de conmutación (23) para controlar el tiempo transcurrido en la IPh, el tiempo en la MPh y el tiempo en la RPh; en la IPh el vector de perfusión de fármacos anestésicos (5) es el mismo que el vector de perfusiones del protocolo manual (4) ; en la MPh el vector de perfusión de fármacos anestésicos (5) es el mismo que el vector de perfusiones automáticas (22) ; y en la RPh se activa la suspensión del sistema de bombas de perfusión (2) ; Paso 10: Calcular la perfusión de control del fármaco ePPF (15.1) a partir del subsistema de control MISO-PID-ePPF Ci (25) , que a su vez está formado por tres controladores SISO-PID (C11, C12, C13) (25.1, 25.2, 25.3) , cada controlador SISO-PID está formado a su vez por tres acciones de control de fármacos que se detallan a continuación: 1) el controlador SISO-PID C11 (25.1) que calcula la contribución a la perfusión de la perfusión de fármaco ePPF (15.1.1) aportada por el vector de error de control del monitor eBIS (12) , está formado por una acción proporcional que relaciona la perfusión parcial de ePPF (15.1.1.1) con el error asimétrico de control proporcional relativo al eBIS (12.1) , por una acción integral que relaciona la perfusión parcial de ePPF (15.1.1.2) con el error simétrico de control integral relativo al eBIS (12.2) y por una acción derivativa que relacional la perfusión parcial de ePPF (15.1.1.3) con el error asimétrico derivativo relativo al eBIS (12.3) ; 2) el controlador SISO-PID C12 (25.2) que calcula la contribución a la perfusión de control de la perfusión de fármaco ePPF (15.1.2) aportada por el vector de error de control del monitor eNOX (13) , está formado por una acción proporcional que relaciona la perfusión parcial de ePPF (15.1.2.1) con el error asimétrico de control proporcional relativo al eNOX (13.1) , por una acción integral que relaciona la perfusión parcial de ePPF (15.1.2.2) con el error simétrico de control integral relativo al eNOX (13.2) y por una acción derivativa que relaciona la perfusión parcial de ePPF (15.1.2.3) con el error asimétrico derivativo relativo al eNOX (13.3) ; 3) el controlador SISO-PID C13 (25.3) que calcula la contribución a la perfusión de control de la perfusión de fármaco ePPF (15.1.3) aportada por el vector de error de control del monitor eNMB (14) , está formado por una acción proporcional que relaciona la perfusión parcial de ePPF (15.1.3.1) con el error asimétrico de control proporcional relativo al eNMB (14.1) , por una acción integral que relaciona la perfusión parcial de ePPF (15.1.3.2) con el error simétrico de control integral relativo al eNMB (14.2) y por una acción derivativa que relaciona la perfusión parcial de ePPF (15.1.3.3) con el error asimétrico derivativo relativo al eNMB (14.3) ; Paso11: Calcular la perfusión de control del fármaco eRMF (15.2) a partir del subsistema de control MISO-PID-eRMF C2 (26) , que a su vez está formado por tres controladores SISO-PID (C21, C22, C23) (26.1, 26.2, 26.3) , cada controlador SISO-PID está formado a su vez por tres acciones de control de fármacos que se detallan a continuación: 1) el controlador SISO-PID C21 (26.1) que calcula la contribución a la perfusión de control de la perfusión de fármaco eRMF (15.2.1) aportada por el vector de error de control del monitor eBIS (12) , está formado por una acción proporcional que relaciona la perfusión parcial de ePPF (15.2.1.1) con el error asimétrico de control proporcional relativo al eBIS (12.1) , por una acción integral que relaciona la perfusión parcial de eRMF (15.2.1.2) con el error simétrico de control integral relativo al eBIS (12.2) y por una acción derivativa que relacional la perfusión parcial de eRMF (15.2.1.3) con el error asimétrico derivativo relativo al eBIS (12.3) ; 2) el controlador SISO-PID C22 (26.2) que calcula la contribución a la perfusión de control de la perfusión de fármaco eRMF (15.2.2) aportada por el vector de error de control del monitor eNOX (13) , está formado por una acción proporcional que relaciona la perfusión parcial de eRMF (15.2.2.1) con el error asimétrico de control proporcional relativo al eNOX (13.1) , por una acción integral que relaciona la perfusión parcial de eRMF (15.2.2.2) con el error simétrico de control integral relativo al eNOX (13.2) y por una acción derivativa que relaciona la perfusión parcial de eRMF (15.2.2.3) con el error asimétrico derivativo relativo al eNOX (13.3) ; 3) el controlador SISO-PID C23 (26.3) que calcula la contribución a la perfusión de control de la perfusión de fármaco eRMF (15.2.3) aportada por el vector de error de control del monitor eNMB (14) , está formado por una acción proporcional que relaciona la perfusión parcial de eRMF (15.2.3.1) con el error asimétrico de control proporcional relativo al eNMB (14.1) , por una acción integral que relaciona la perfusión parcial de eRMF (15.2.3.2) con el error simétrico de control integral relativo al eNMB (14.2) y por una acción derivativa que relaciona la perfusión parcial de eRMF (15.2.3.3) con el error asimétrico derivativo relativo al eNMB (14.3) ; Paso12: Calcular la perfusión de control del fármaco eRCN (15.3) a partir del subsistema de control MISO-PID-eNMB C3 (27) , que a su vez está formado por tres controladores SISO-PID (C31, C32, C33) (27.1, 27.2, 27.3) , cada controlador SISO-PID está formado a su vez por tres acciones de control de fármacos que se detallan a continuación: 1) el controlador SISO-PID C31 (27.1) que calcula la contribución a la perfusión de control de la perfusión de fármaco eRCN (15.3.1) aportada por el vector de error de control relativo al eBIS (12) , está formado por una acción proporcional que relaciona la perfusión parcial de eRCN (15.3.1.1) con el error asimétrico de control proporcional relativo al eBIS (12.1) , por una acción integral que relaciona la perfusión parcial de eRCN (15.3.1.2) con el error simétrico de control integral relativo al eBIS (12.2) y por una acción derivativa que relaciona la perfusión parcial de eRCN (15.3.1.3) con el error asimétrico derivativo relativo al eBIS (12.3) ; 2) el controlador SISO-PID C32 (27.2) que calcula la contribución a la perfusión de control de la perfusión de fármaco eRCN (15.3.2) aportada por el vector de error de control del m onitor eNOX (13) , está formado por una acción proporcional que relaciona la perfusión parcial de eRCN (15.3.2.1) con el error asimétrico de control proporcional relativo al eNOX (13.1) , por una acción integral que relaciona la perfusión parcial de eRCN (15.3.2.2) con el error simétrico de control integral relativo al eNOX (13.2) y por una acción derivativa que relaciona la perfusión parcial de eRCN (15.3.2.3) con el error asimétrico derivativo relativo al eNOX (13.3) ; 3) el controlador SISO-PID C33 (27.3) que calcula la contribución a la perfusión de control de la perfusión de fármaco eRCN (15.3.3) aportada por el vector de error de control relativo al eNMB (14) , está formado por una acción proporcional que relaciona la perfusión parcial de eRMF (15.3.3.1) con el error asimétrico de control proporcional relativo al eNMB (14.1) , por una acción integral que relaciona la perfusión parcial de eRCN (15.3.3.2) con el error simétrico de control integral relativo al eNMB (14.2) y por una acción derivativa que relaciona la perfusión parcial de eRCN (15.3.3.3) con el error asimétrico derivativo relativo al eNMB (14.3) ; A continuación, se expresan las ecuaciones que definen el sistema de control SynPlD que, haciendo uso del vector de perfusiones del protocolo manual (4) , del vector de variables de monitorización (6 ) , del vector de objetivos de las variables monitorizadas (8 ) , de los vectores de los errores de control (12, 13, 14) , del vector de corrección (18) y del vector de control fiable (20) , obtiene un vector de perfusión de fármacos anestésicos (5) que mantendrá al paciente (1) en un estado anestésico satisfactorio a pesar de la cirugía. Los fármacos considerados son ePPF, eRMF y eRCN y los monitores considerados son eBIS, eNOX y eNMB, por lo que el orden de los vectores se fija en 3x1 y el orden de las matrices en 3x3, en este ejemplo de realización de la invención. Resaltar que la presente invención no hace uso de modelos fármacocinéticos o fármacodinamicos para su diseño ni para la personalización a cada paciente (1) . Antes de detallar el método y en aras de clarificar las variables que aparecen en las ecuaciones, se relacionan a continuación las más importantes agrupadas por sus unidades físicas y características comunes: 1) Las dimensiones del sistema multivariable son de 3x3, relativo al vector de variables de monitorización (6 ) r=3, donde 1 hace referencia al eBIS, 2 hace referencia al eNOX y 3 hace referencia al eNMB; y relativo al vector de perfusión de fármacos anestésicos (5) s=3, donde 1 hace referencia al ePPF, 2 hace referencia al eRMF y 3 hace referencia al eRCN; 2) El tiempo discretizado se representa con el número entero k, de tal forma que un tiempo real t, se puede mostrar como: t=k-Ts; donde Ts es el periodo de perfusión; el tiempo de inicio de la IPh es t, el tiempo de inicio de la MPh es tm y el inicio del tiempo de la RPh es tr; 3) Vectores que hacen referencia a las perfusiones de fármacos, unidades de perfusión por peso del paciente [pg/ (min-kg) j, ecuación general: U X = [«x1 Mx2 Mx3 T Donde ux hace referencia al vector columna de perfusiones con dimensión (3x1) ; ux1 es la perfusión del ePPF; ux2 es la perfusión del eRMF; ux3 es la perfusión del eRCN; T indica la transposición del vector. El listado de variables de perfusión es el siguiente: x Ref. Vector de perfusiones Símbolo Ecuac. x: hace referencia al subíndice del vector considerado; Ref. indica el número que aparece en las figuras; Símbolo: Identifica la variable por su nombre; Ecuac. indica la ecuación de la descripción general donde ha sido definida. ) Vectores que hacen referencia a las variables de monitorización, unidades de monitorización (UM) y el rango de variación es de 0 a 100; ecuación general: yz = [y2i yz2 yz3 ]T, Donde yz hace referencia al vector columna variables de monitorización (3x1) ; yz1 es la monitorización del eBIS; yz2 es la monitorización del eNOX; yz3 es la monitorización del eNMB; T indica la transposición del vector. El listado de variables de monitorización y sus variantes es el siguiente: z Ref. Descripción del vector de Símbolo Ecuac. 6 variables de monitorización medidas y [2. 1] T 8 valores objetivo de las variables monit yT [2.6] f 10 variables de monitorización filtradas yf [3. 1] HI umbrales superiores de activación de yHI [6.3] LO umbrales inferiores de activación de l yLO [6. 4] z: hace referencia al subíndice del vector considerado; Ref. indica el número que aparece en las figuras; Símbolo: Identifica la variable por su nombre; Ecuac. indica la ecuación de la descripción general donde ha sido definida. ) Vectores que hacen referencia a los vectores de los errores de control (12, 13, 14) , con rango de variación ±200 UM; ecuación general: e j = \_e P j e i j e F j \ ' Donde ej hace referencia al vector columna de errores de control (3x1) ; e1 es el vector de error de control relativo al eBIS; e2 es el vector de error de control relativo al eNOX; e3 es el vector de error de control relativo al eNMB; eP¡ es el vector de error asimétrico de control proporcional relativo al monitor¡; e¡ es el vector de error simétrico de control integral relativo al monitor ¡; y eF¡ es el vector de error asimétrico y filtrado de control derivativo relativo al monitor¡; T indica la transposición del vector. El listado de variables de error y sus variantes es el siguiente: j Ref. Descripción del error de control Símbolo Ecuac. j: hace referencia al subíndice del vector considerado; Ref. indica el número que aparece en las figuras; Símbolo: Identifica la variable por su nombre; Ecuac. indica la ecuación de la descripción general donde ha sido definida. ) Variables que hacen referencia al controlador multivariable y con sinergia MIMO-PID (16) ; a los subsistemas de control MISO-PID (25, 26, 27) y a los controladores SISO-PID. Donde [PID] es la matriz de controladores PID que componen el controlador multivariable y con sinergia MIMO-PID (16) ; C-i es el vector de controladores PID que componen el subsistema de control MISO-PID-ePPF (25) ; C2 es el vector de controladores PID que componen el subsistema de control MISO-PID-eRMF (26) ; C3 es el vector de controladores PID que componen el subsistema de control MISO-PID-eNMB (27) ; Cj es el controlador SISO-PID que relaciona el error asociado al monitor i con el fármaco j. b j Ref. Descripción del controlador PID Símbolo Ecuac. , . i, j: hace referencia al subíndice/s del/los controlador/es considerado/s; Ref. indica el número que aparece en las figuras; Símbolo: Identifica la variable por su nombre; Ecuac. indica la ecuación de la descripción general donde ha sido definida. El sistema de la presente invención se actualiza cada Ts segundos, tiempo asociado al periodo de muestreo. El sistema se inicia en el tiempo t¡ con la IPh. A partir del instante de conmutación para pasar de la IPh a la MPh (tm) los valores son actualizados cada periodo de ejecución del método (Ts) según las ecuaciones 2 a 13, según se detalla a continuación: Ecuación 2: Medir el vector de variables de monitorización (6) ; definir y calcular el vector de perfusiones del protocolo manual (4) ; y fijar el vector de objetivos de las variables monitorizadas (8) . Estos son los resultados obtenidos en el paso 2. Ref. Definición matemática Ecuac. Ref. indica el número que aparece en las figuras; Ecuac. indica la ecuación de la descripción general donde ha sido definida, particularizada para s=r=3. Ecuación 3: Calcular el vector de variables filtradas de monitorización (10) , definir un banco de filtros (9) , basados en filtros paso bajo de orden 1; y definir un vector de frecuencias de corte. El resultado del paso 3 es el vector de variables filtradas de monitorización (10) . Ref. Definición matemática Ecuac. Ref. indica el número que aparece en las figuras; Ecuac. indica la ecuación de la descripción general donde ha sido definida, particularizada para s=r=3. Ecuación 4: Calcular el vector de error de control del monitor eBIS ei (12) con el generador de error de la DoH (28) , el vector de error de control del monitor eNOX e2 (13) con el generador de error de la ANG (29) , y el vector de error de control del monitor eNMB e3 (14) con el generador de error de la RMX (30) , cada uno con sus componentes proporcional, integral y derivativa (12.1, 12.2, 12.3) , (13.1, 13.2, 13.3) y (14.1, 14.2, 14.3) ; calcular los errores asimétrico proporcional (12.1, 13.1, 14.1) , simétrico integral (12.2, 13.2, 14.2) y asimétrico derivativo (12.3, 13.3, 14.3) , de cada controlador SISO-PID. Los errores asimétricos mostrados en la presente invención se calculan de tal forma que el vector de objetivos de las variables monitorizadas (8) está ponderado por una matriz de coeficientes [B] en la acción proporcional y una matriz de coeficientes [G] en la acción derivativa, siendo unitario el valor de ponderación de la acción integral. El sistema de control SynPlD de la presente invención se definen tanto [B] como [G] dependientes del vector de variables de monitorización (6) y del vector de objetivos de las variables monitorizadas (8) . Los resultados del paso 4 son los vectores de los errores de control (12, 13, 14) . Ref. Definición matemática Ecuac. Ref. Definición matemática Ecuac. Ref. indica el número que aparece en las figuras; Ecuac. indica la ecuación de la descripción general donde ha sido definida, particularizada para s=r=3. Ecuación 5: Calcular el vector de perfusiones de control (15) mediante un controlador multivariable y con sinergia MIMO-PID (16) , los vectores de los errores de control del monitor eBIS (12) , eNOX (13) y eNMB (14) y el vector de perfusiones del protocolo manual (4) ; definir la matriz [PID] de controladores SISO-PID que componen el controlador multivariable y con sinergia MIMO-PID (16) ; definir los controladores SISO-PID C¡j relativos al monitor j y al fármaco /; definir las acciones de control proporcional, integral y derivativa de los controladores SISO-PID cuya suma define la acción de control total de cada controlador SISO-PID; definir las matrices de ganancias relativas a los controladores SISO-PID; definir la matriz de sinergia de fármacos; definir el vector Ko de ganancias sobre el vector de perfusiones del protocolo manual (4) ; definir los subsistemas de control MISO-PID (25, 26, 27) . El resultado del Paso 5 es el vector de perfusiones de control (15) . Ref. Definición matemática Ecuac. 15 Upid = [M1 U2 U3 ] [5. 1] Ref. Definición matemática Ecuac. K oí = [ K on K ol 2 K ol 3 f [5. 11] Ref. Definición matemática Ecuac. Ref. indica el número que aparece en las figuras; Ecuac. indica la ecuación de la descripción general donde ha sido definida, particularizada para s=r=3. Ecuación 6 : Definir y calcular unas perfusiones correctoras de fármacos (18) a partir del vector de variables filtradas de monitorización (10) ; definir los vectores de umbrales superiores e inferiores de activación de la corrección. El resultado del paso 6 es el vector de corrección (18) . Ref. Definición matemática Ecuac. Ref. Definición matemática Ecuac. Ref. indica el número que aparece en las figuras; Ecuac. indica la ecuación de la descripción general donde ha sido definida, particularizada para s=r=3. Ecuación 7: Definir y calcular el vector de control fiable (20) , para evitar la hiper/infra dosificación de fármacos, a partir del vector de perfusiones de control (15) y del vector de corrección (18) ; definir los vectores de limites superiores e inferiores de la perfusión de fármacos atendiendo a dos conceptos: 1) sólo se puede aplicar perfusiones positivas al paciente (1) , por tanto, el sistema de bombas de perfusión (2) queda suspendido (perfusión nula) cuando el vector de perfusiones de control (15) más el vector de corrección (18) da como resultado perfusiones negativas o nulas; y 2) los límites máximos de las perfusiones deben de evitar las sobredosis de fármacos para evitar los niveles de toxicidad. El resultado del paso 7 es el vector de control fiable (20) . Ref. Definición matemática Ecuac. Ref. Definición matemática Ecuac. Ref. indica el número que aparece en las figuras; Ecuac. indica la ecuación de la descripción general donde ha sido definida, particularizada para s=r=3. Ecuación 8 : Definir y calcular el vector de perfusiones automáticas (22) a partir del vector de control fiable (20 ) ; definir el vector de resoluciones de cada bomba de perfusión de fármacos; el vector de control fiable (20 ) se acomoda a la resolución del sistema de bombas de perfusión continua (2 ) para obtener así el vector de perfusiones automáticas (22) que se dispensan al paciente (1) . El resultado del paso 8 es el vector de perfusiones automáticas (22 ) . Ref. Definición matemática Ecuac. Ref. indica el número que aparece en las figuras; Ecuac. indica la ecuación de la descripción general donde ha sido definida, particularizada para s=r=3. Ecuación 9: Definir y calcular el vector de perfusión de fármacos anestésicos (5) a partir del vector de perfusiones del protocolo manual (4) y el vector de perfusiones automáticas (22) a partir de un sistema de conmutación (23) . El resultado del paso 9 es el vector de perfusiones de fármacos anestésicos (5) . Ref. Definición matemática Ecuac. Ref. indica el número que aparece en las figuras; Ecuac. indica la ecuación de la descripción general donde ha sido definida, particularizada para s=r=3. Ecuación 10: Definir el subsistema de control MISO-PID-ePPF (25) como un conjunto de controladores SISO-PID; calcular la perfusión de control del ePPF (15.1) ; a partir de los controladores SISO-PID (25.1, 25, .2, 25.3) , de los vectores de los errores de control (12, 13, 14) y de la perfusión de ePPF del protocolo manual (4.1) . El resultado del paso 10 es la perfusión de control del ePPF (15.1) . Ref. Definición matemática Ecuac. Ref. indica el número que aparece en las figuras; Ecuac. indica la ecuación de la descripción general donde ha sido definida, particularizada para s=r=3. Ecuación 11: Definir el subsistema de control MISO-PID-eRMF (26) como un conjunto de controladores SISO-PID; calcular la perfusión de control del eRMF (15.2) ; a partir de los controladores SISO-PID (26.1, 26, .2, 26.3) , de los vectores de los errores de control (12, 13, 14) y de la perfusión de ePPF del protocolo manual (4.2) . El resultado del paso 11 es la perfusión de control del eRMF (15.2) . Ref. Definición matemática Ecuac. Ref. Definición matemática Ecuac. Ref. indica el número que aparece en las figuras; Ecuac. indica la ecuación de la descripción general donde ha sido definida, particularizada para s=r=3. Ecuación 12: Definir el subsistema de control MISO-PID-eNMB (27) como un conjunto de controladores SISO-PID; calcular la perfusión de control del eRCN (15.3) ; a partir de los controladores SISO-PID (27.1, 27, .2, 27.3) , de los vectores de los errores de control (12, 13, 14) y de la perfusión de eRCN del protocolo manual (4.3) . El resultado del paso 11 es la perfusión de control del eRCN (15.3) . Ref. Definición matemática Ecuac. U3 C3 -S, + K ol3 'Ug¡3 15.3 [12.2] U3 C3l'$31 + C32 '^ 32 + C33 '$33 + K ol3 'Uol3 Ref. indica el número que aparece en las figuras; Ecuac. indica la ecuación de la descripción general donde ha sido definida, particularizada para s=r=3. Ecuación 13: Se formula para la reivindicación de nuevos fármacos y monitores. Ref. Definición matemática Ecuac. Ref. indica el número que aparece en las figuras; Ecuac. indica la ecuación de la descripción general donde ha sido definida, particularizada para s=r=3. Ecuación 14: Ajuste de los parámetros del sistema de control SynPID a cada paciente para absorber la variabilidad inter/intrapaciente. El ajuste involucra al paso 3 y al paso 5 de la invención. En el paso 3 se han de ajustar las frecuencias de corte de los filtros expresadas en las ecuaciones [3. 5] y [3. 6 ]. En el paso 5 se han de ajustar las matrices de ganancias del controlador multivariable y con sinergia MIMO-PID (16) expresadas en las ecuaciones [5. 16], [5. 17] y [5. 18]. La información necesaria para el ajuste se extrae en la IPh donde al paciente (1) se le somete únicamente al vector de perfusiones del protocolo manual (4) . Por tanto, desde t¡ hasta tm se almacenan en una memoria las ejecuciones del método y justo en el tiempo tm se aplica una variante del método de Cohen-Coon de ajuste empírico de PIDs y en ese instante el sistema de conmutación (23) el vector de perfusión de fármacos anestésicos (5) es el resultado del sistema de control SynPlD (24) según el vector de perfusiones automáticas (22) . Las ganancias relativas a la matriz de ganancias proporcional [5. 19] está relacionada con el peso del paciente y el vector de perfusiones del protocolo manual (4) están relacionadas con el peso, altura, género y masa muscular del paciente. La ecuación 14 involucra a todos los pasos definidos para la invención propuesta, pero de forma directa involucra especialmente a los pasos 3, 5 y 6. Una vez calculadas las ganancias en el tiempo tm, estas permanecerán constantes hasta el tiempo de recuperación tr. Los sistemas que necesitan ajuste son: - Banco de filtros (9) : es necesario ajustar los tres parámetros que hacen referencia a la frecuencia de corte. - Controlador multivariable y con sinergia MIMO-PID (16) : es necesario ajustar 18 parámetros, por cada controlador SISO-PID hay que ajusta una ganancia proporcional, una integral y una derivativa. - Sistema corrector de perfusiones (17) : que utiliza las ganancias proporcionales del controlador multivariable y con sinergia MIMO-PID (16) . Ref. Definición matemática Ecuac. Ref. indica el número que aparece en las figuras; Ecuac. indica la ecuación de la descripción general donde ha sido definida, particularizada para s=r=3. "x" identifica el producto elemento a elemento (producto Schur) . Donde K es una ganancia universal [ (¡ig/ (min) ) /UM]; [KP] es la matriz de ganancias proporcionales [ (pg/ (min-kg) ) /UM]; [K|] es la matriz de ganancias integrales [ (pg/ (min-kg) ) / (UM-min) ]; [T|] es la matriz de tiempos de acción integral [min]; [KD] es la matriz de ganancias derivativas [ (pg/kg) /UM]; [TD] es la matriz de tiempos de acción derivativo [min]. Ecuación 15: Ajuste de otros parámetros del sistema de control SynPÍD que son universales y comunes a todos los pacientes (común a la variabilidad inter/intrapaciente) . Estos parámetros son en general constantes, pero pueden ser ajustados de forma explícita y generalizada por sexo, grupos de población (diabéticos, obesos...) , tipos de cirugía, por territorios y/o edades. A continuación, se relacionan los parámetros considerados y las ecuaciones en las que aparecen: Parámetro Tipo Definición Ecuac. Parámetro Tipo Definición Ecuac. APLICACIÓN INDUSTRIAL Respecto de la implementación del sistema de multi-perfusión de fármacos con sinergia mediante control en CL MIMO-PID (SynPlD) aplicado en actos anestésicos vía IV de la presente invención, una de las realizaciones contempla su ejecución en código interpretable por dispositivos Android, IOS, Arduino, Raspberr y -PI, ordenador personal, bombas de perfusión comerciales o hardware específico. El sistema de control SynPID se ejecuta de forma iterativa cada Ts segundos y consta de las siguientes fases: 1) Puesta en servicio en t¡ donde existen N¡ iteraciones del método; 2) IPh, desde t¡ hasta tm, donde existen Nm-N¡ iteraciones del método; 3) MPh, desde tm hasta tr; y 4) RPh, a partir de tr, donde existen Nr-Nm iteraciones del método. El resultado de cada iteración es obtener el vector de perfusión de fármacos anestésicos (5) que se ha de administrar al paciente (1) con el sistema de bombas de perfusión (2 ) para que el vector de variables de monitorización (6 ) sea conducido al vector de objetivos de las variables monitorizadas (8 ) a pesar del vector de actuaciones quirúrgicas (7) . Las acciones a tomar en cada una de las fases de aplicación del método SynPID implementado en cualquiera de los dispositivos antes indicados son: 1) Antes de la puesta en servicio se deben de obtener los siguientes datos: 1) del paciente (1) el peso, edad, sexo, altura y masa muscular para ajustar vector de perfusiones del protocolo manual (4) del que derivarán los valores de los vectores de las ecuaciones [2.4] y [2.5]; 2) del sistema de bombas de perfusión (2) su resolución para ajustar el vector de la ecuación [8. 3]; 3) del sistema SynPlD (24) su periodo de ejecución mostrado en la ecuación [2. 4]; la matriz de sinergia de fármacos mostrada en la ecuación [5. 10]; las matrices de asimetría de los errores de control mostrados en las ecuaciones [4. 3] y [4. 5] y en general de todos los parámetros mostrados en la Ecuación 15. 2) En la IPh el vector de perfusión de fármacos anestésicos (5) que se administra al paciente (1) se corresponde con el vector de perfusiones del protocolo manual (4) tal y como se mostró en la ecuación [2. 3]. 3) Al final de la IPh se realiza el ajuste de las matrices de ganancias mostradas en las ecuaciones [5. 4], [5. 5] y [5. 6] y en general de todos los parámetros mostrados en la Ecuación 14. 4) En la MPh el vector de perfusión de fármacos anestésicos (5) que se administra al paciente (1) se corresponde con el vector de perfusiones automáticas (22) . 5) En la RPh el vector de perfusión de fármacos anestésicos (5) que se administra al paciente (1) se anula. En una iteración indeterminada del sistema de control SynPlD se deben de seguir las siguientes actuaciones y en el orden indicado: 1. Hay que comenzar por adquirir la información del vector de variables de monitorización (6) utilizando los equipos de monitorización (3) , la información adquirida en la iteración actual y en las iteraciones pasadas se almacenan en una memoria para su posterior utilización; la información obtenida en esta actuación servirá para la realimentación del sistema de control en CL; 2. Hay que fijar el vector de objetivos de las variables monitorizadas (8) ; el resultado de la iteración actual y de las iteraciones pasadas se almacenan en una memoria para su posterior utilización; 3. Hay que proceder a la limpieza de ruido y artefactos del vector de variables de monitorización (6) mediante un banco de filtros (9) para obtener el vector de variables filtradas de monitorización (10) ; el resultado de la iteración actual y de las iteraciones pasadas se almacenan en una memoria para su posterior utilización; 4. Hay que calcular los vectores de los errores de control (12, 13, 14) mediante un generador de errores de control (11) ; cada vector de error de control está formado por un error asimétrico proporcional, un error simétrico integral y un error asimétrico derivativo; utilizando los instantes actuales del vector de objetivos de las variables monitorizadas (8) y del vector de variables filtradas de monitorización (10) ; el resultado de la iteración actual y de las iteraciones pasadas se almacenan en una memoria para su posterior utilización; Hay que calcular el vector de perfusiones de control (15) mediante un controlador multivariable y con sinergia MIMO-PID (16) que presenta como entradas los vectores de los errores de control (12, 13, 14) y el vector de perfusiones del protocolo manual (4) ; de cada controlador SISO-PID se obtiene la contribución a cada fármaco de cada error de control distribuida en una acción proporcional que hace uso de la iteración actual, una acción integral que hace uso de la iteración actual y todas las pasadas y una acción derivativa que hace uso de la iteración actual y de la anterior; el resultado de la iteración actual y de las iteraciones pasadas se almacenan en una memoria para su posterior utilización; Hay que calcular un vector de corrección (18) mediante un sistema corrector de perfusiones (17) que presenta a su entrada el vector de variables filtradas de monitorización (10) de la iteración actual; el resultado de la iteración actual y de las iteraciones pasadas se almacenan en una memoria para su posterior utilización; Hay que calcular un vector de control fiable (20) mediante un sistema de seguridad (19) que presenta a su entrada la iteración actual del vector de perfusiones de control (15) y del vector de corrección (18) ; el resultado de la iteración actual y de las iteraciones pasadas se almacenan en una memoria para su posterior utilización; Hay que calcular un vector de perfusiones automáticas (22) mediante un sistema cuantificador (21) que presenta a su entrada la iteración actual del vector de control fiable (20) ; el resultado de la iteración actual y de las iteraciones pasadas se almacenan en una memoria para su posterior utilización; Hay que definir el vector de perfusión de fármacos anestésicos (5) mediante un sistema de conmutación (23) que presenta como entradas la iteración actual del vector de perfusiones de control (15) , del vector de perfusiones del protocolo manual (4) y de un vector de ceros; el resultado de la iteración actual y de las iteraciones pasadas se almacenan en una memoria para su posterior utilización; Una vez que se ha obtenido el vector de perfusión de fármacos anestésicos (5) se comienza una nueva iteración, volviendo al punto uno de esta lista e incrementando del número de la iteración. El sistema de multi-perfusión de fármacos anestésicos con sinergia mediante control en CL MIMO-PID (SynPlD) aplicado en actos anestésicos vía IV de la presente invención, está preparado para su instalación en bombas de perfusión inteligentes que hacen uso de un circuito electrónico basado en un microprocesador con memoria, configurado para determinar el vector de perfusión de fármacos anestésicos (5) para administrar al paciente (1) por vía IV en un acto quirúrgico, cada periodo de iteración Tses configurable entre 1 y 30 segundos. El vector de perfusión de fármacos anestésicos (5) tiene como misión obtener un estado anestésico satisfactorio dado por el vector de objetivos de las variables monitorizadas (8) . El sistema de control SynPlD está configurado para llevar a cabo el método presentado en la invención que se repite cada Ts segundos, el sistema comprende la ejecución de los siguientes bloques: 1. Memoria: Una memorización del histórico de datos de la información procedente de los equipos de monitorización (3) , el vector de objetivos de las variables monitorizadas (8) , vector de variables filtradas de monitorización (10) , vectores de los errores de control (12, 13, 14) , vector de perfusiones de control (15) , vector de corrección (18) , vector de control fiable (20) y vector de perfusión de fármacos anestésicos (5) realizadas por el sistema de bombas de perfusión (2) y del código informático basado en las instrucciones necesarias para ejecutar el método SynPlD en un procesador; 2. Contador: Un contador de tiempos electrónico para determinar las fases IPh, MPh y RPh, estimando que la IPh dura entre 5 y 10 minutos, que la MPh es muy variable en duración en función de la cirugía y que la RPh dura entre 10 y 20 minutos; este contador implementa el sistema de conmutación (23) en forma de código informático y las instrucciones pertinentes para ejecutarlas en el procesador; 3. Ajuste: Una rutina software que se ejecuta en el tiempo tm para ajustar los parámetros del sistema de control SynPID a cada paciente (1) haciendo uso de las acciones mostradas en la Ecuación 14 y de la memoria del sistema; 4. Rutina 1: Rutina software reutilizable para la implementación del banco de filtros (9) haciendo uso de la matriz de ganancias [KD] mostrada en la ecuación [5. 6] y del coeficiente de filtrado N presentado en la ecuación [3. 4]; la rutina puede ser ejecutada varias veces con parámetros de entrada modificables, la rutina hace uso de la información almacenada en la memoria; Rutina 2: Rutina software reutilizable para la implementación del generador de errores de control (11) haciendo uso de los elementos de las matrices [B] y [G] dadas en las ecuaciones [4. 3] y [4. 5], cuyos valores están comprendidos entre 1 y 2; se implementa una sola rutina con el código de obtención de los vectores de los errores de control (12, 13, 14) , la rutina puede ser ejecutada varias veces con parámetros de entrada modificables, la rutina hace uso de la información almacenada en la memoria; Rutina 3: Rutina software reutilizable para la implementación del controlador multivariable y con sinergia MIMO-PID (16) haciendo uso de los controladores SISO-PID definidos en las ecuaciones [5. 14] y [5. 15]; se implementa una sola rutina con el código de ejecución de cada controlador SISO-PID que forman los tres subsistemas de control MISO-PID (25, 26, 27) y que a su vez forman el controlador multivariable y con sinergia MIMO-PID (16) , la rutina puede ser ejecutada varias veces con parámetros de entrada modificables, la rutina hace uso de la información almacenada en la memoria; Rutina 4: Rutina software que calcule el vector de perfusiones de control (15) con los resultados obtenidos de aplicar la Rutina 3 relativa a los resultados de los controladores SISO-PID y del vector de perfusiones del protocolo manual (4) , mostrados en las ecuaciones [5. 14] y [2. 4] [2. 5]; se implementa una sola rutina con el código de ejecución de obtener el vector de perfusiones de control (15) , la rutina hace uso de la información almacenada en la memoria; Rutina 5: Rutina software reutilizable para la implementación del sistema corrector de perfusiones (17) haciendo uso del vector de variables filtradas de monitorización (10) mostrado en la ecuación [3. 2], haciendo uso de las frecuencias de corte definidas en las ecuaciones [3. 3] y [3. 4]; se implementa una sola rutina con el código de ejecución del sistema corrector de perfusiones (17) , la rutina puede ser ejecutada varias veces con parámetros de entrada modificables, la rutina hace uso de la información almacenada en la memoria; Rutina 6: Rutina software reutilizable para la implementación del sistema de seguridad (19) haciendo uso del vector de perfusiones de control (15) mostrado en las ecuaciones [6. 1] y [6. 2], se implementa una sola rutina con el código de ejecución del sistema de seguridad (19) , la rutina puede ser ejecutada varias veces con parámetros de entrada modificables, la rutina hace uso de la información almacenada en la memoria; Rutina 7: Rutina software reutilizable para la implementación del sistema cuantificador (21) haciendo uso del vector de control fiable (20) mostrados en las ecuaciones [7. 1] y [7. 2], se implementa una sola rutina con el código de ejecución del sistema cuantificador (21) , la rutina puede ser ejecutada varias veces con parámetros de entrada modificables, la rutina hace uso de la información almacenada en la memoria.
+ ES-2808969_B2 SISTEMA DE PERFUSIÓN DE FÁRMACOS EN LAZO CERRADO CON CONTROL SINÉRGICO SECTOR DE LA TÉCNICA La presente invención se encuadra en el campo del control en lazo cerrado (closed-loop, CL) para la perfusión automática de fármacos, por ejemplo en actos de anestesia administrada por vía intravenosa (IV) , utilizando para ello un banco de algoritmos de control basados en variantes del controlador PID (proporcional-integral-derivativo) . La presente invención se enmarca en el sector de control automático de sistemas biológicos y presenta como principal campo de aplicación el multicontrol automatizado de las perfusiones de fármacos por vía IV en actos anestésicos. Pero puede ser empleado en el control de enfermedades agudas o crónicas en las que el paciente requiera de una monitorización múltiple con la perfusión de varios fármacos. Una aplicación directa de esta invención sería la aplicación en el páncreas artificial para el control de la diabetes tipo 1 con monitorización de la glucosa y con la infusión continua exógena de insulina y glucagón (Peters, T. M., and A. Haidar. "Dual- hormone artificial páncreas: benefits and limitations compared with single - hormone systems." Diabetic Medicine 35.4 (2018) : 450 459.) . De igual modo y con la misma idea se puede aplicar al sector veterinario para la dispensación simultánea de varios fármacos a los animales, con el fin de aplicarles anestesia. También podría ser usado para controlar patologías agudas o crónicas en las que se necesite monitorizar varias variables fisiológicas del animal y admistrarle varios fármacos de forma simultánea. ANTECEDENTES DE LA INVENCIÓN La definición de anestesiología, proporcionada por la American Board of anaesthesiology, afirma que la anestesiología es la práctica de la medicina que proporciona insensibilidad al dolor durante procedimientos quirúrgicos, obstétricos, terapéuticos y de diagnóstico. Los anestesiólogos administran los fármacos por diferentes accesos del cuerpo humano ara establecer un estado en el que se puede realizar una cirugía no traumática para el paciente. Las técnicas actuales de anestesia general establecen tres objetivos principales que deben cumplirse: 1) profundidad de la hipnosis (en inglés, Depth of Hypnosis, DoH) ; 2) analgesia (ANG) y 3) relajación muscular (en inglés, Muscle Relaxation, MRX) . Existen métodos para estimar estas variables (en esta descripción se referirá a estas variables como monitores) , respectivamente: 1) el índice biespectral (BIS) es una medida de electroencefalograma multifactorial derivada empíricamente, cuyo índice dado se correlaciona con la DoH del paciente (G. Schneider et al., Detection of awareness in surgical patients with eeg-based indicesbispectral index and patient state index, British journal of anaesthesia 91 (3) (2003) 329-335) ; 2) el índice de respuesta de estimulación nociceptiva (NOX) es un índice univariante calculado a partir de las concentraciones ponderadas del fármaco empleado, propuesto para predecir la probabilidad de respuesta a un estímulo nociceptivo durante la anestesia (P. Schumacher et al., Time-based online display of a noxious stimulus response index base on pharmacological data, in: Annual Meeting of the American Society of Anesthesiologists. San Francisco, California. Anesthesiology, Vol. 107, 2007, p. A17) ; y 3) el relajante muscular se administra con el fin de mantener el nivel deseado de bloqueo neuromuscular (NMB) durante la cirugía (Á. Miranda et al., Optimal time for constant drug infusion initialization in neuromuscular blockade control, in: 2014 IEEE International Symposium on Medical Measurements and Applications (MeMeA) , IEEE, 2014, pp. 1-6) . Adicionalmente, existen otras variables fisiológicas objeto de monitorización y de mucho interés para el especialista como son la cardiografía, la presión arterial, la oxigenación en sangre o la capnografía. El proceso de anestesia general IV generalmente conocido como anestesia IV total, se desarrolla en un escenario clínico que se presenta generalmente en tres fases: 1) fase de inducción (en inglés induction phase, IPh) , los fármacos se administran mediante bolo y perfusión constante; el paciente es conducido al estado anestésico deseado, tratando de obtener los valores deseados de DoH, ANG y MRX lo más rápidamente posible; 2) fase de mantenimiento (en inglés, maintenance phase, MPh) , comienza el procedimiento quirúrgico, y se realiza una perfusión de diferentes fármacos modificados convenientemente por el anestesiólogo para mantener el estado anestésico deseado; los fármacos utilizados de forma simultánea pueden presentar un efecto sinérgico; el objetivo en esta fase es mantener el estado anestésico cercano a los valores objetivo; y 3) fase de recuperación (en inglés, recover y phase, RPh) , se detiene la administración de los ármacos para recuperar la consciencia, para eliminar ANG y MRX (F. Padula, C. lonescu, N. Latronico, M. Paltenghi, A. Visioli, G. Vivacqua, Optimized PID control of depth of hypnosis in anesthesia, Computer methods and programs in biomedicine 144 (2017) 21-35) . En la actualidad, los protocolos más utilizados en IV son las perfusiones controladas manualmente y el método Target Control Infusion (TCI) , que consiste en administrar una perfusión constante de los fármacos también durante la MPh, calculada adecuadamente a partir de un valor de referencia deseado de perfusión (Á. Miranda et al., Optimal time for constant drug infusion initialization in neuromuscular blockade control, in: 2014 IEEE International Symposium on Medical Measurements and Applications (MeMeA) , IEEE, 2014, pp. 1-6) . La administración de fármacos IV por perfusión ofrece múltiples ventajas (M. C. van den Nieuwenhuyzen et al., Burm Target-controlled infusion systems, Clinical pharmacokinetics 38 (2) (2000) 181-190) . Sin embargo, varios factores no hacen tan evidente el uso de TCI en la práctica clínica, como la experiencia del anestesista, la preferencia personal, la variabilidad clínica farmacocinética interindividual y la comprensión de los principios de la TCI. En consecuencia, TCI se ha convertido en el puente entre la investigación en curso y la práctica clínica actual, abriendo la posibilidad de diseñar sofisticados sistemas de automatización. La aplicación del control con realimentación sobre los fármacos de perfusión en anestesia ha sido ampliamente investigado ya que el control automático en CL presenta una serie de ventajas socio-económicas, como son: 1) la reducción de costes tanto para el paciente como para el sistema sanitario, al igual que la reducción de la carga de trabajo del anestesiólogo; 2) la reducción de la dosis utilizada, lo que implica un tiempo de recuperación más rápido y, en consecuencia, una mejor recuperación del paciente en el postoperatorio; y 3) un rendimiento más robusto con menos episodios de sobre/infradosificación. En resumen, esto se traduce en una mayor seguridad clínica para el paciente (F. Padula et al., Optimized PID control of depth of hypnosis in anesthesia, Computer methods and programs in biomedicine 144 (2017) 21-35) . Sin embargo, aunque se han desarrollado varios sistemas en las últimas décadas, todos ellos siguen siendo prototipos sin marca CE ni aprobación de la FDA para su uso clínico. El control automático en anestesia pretende mantener un estado anestésico satisfactorio cercano a los valores objetivo de las variables de monitorización deseadas además de un alto rechazo a las perturbaciones consideradas como las modificaciones en el estado nestésico ocasionadas por la actuación del cirujano (F. Padula et al, Optimized PID control of depth of hypnosis in anesthesia, Computer methods and programs in biomedicine 144 (2017) 21-35) . Kai Kuck, en su artículo "The Three Laws of Autonomous and Closed-Loop Systems in anaesthesia" (Kuck, K., & Johnson, K. B. The three laws of autonomous and closed-loop systems in anesthesia. Anesthesia & Analgesia 124 (2017) 377-380) , postula tres leyes a las cuales los sistemas autónomos de anestesia deben estar sujetos: 1) no hacer daño, el sistema debe ser seguro para el paciente y en caso de fallo, debe fallar ligeramente, descartando cualquier tipo de peligro; 2) ser transparente, esto es, el sistema debe ejecutar los objetivos establecidos de forma fiable y comprensible, permitiendo al anestesiólogo predecir su comportamiento; y 3) reducir la carga de trabajo, el sistema en sí no debe requerir una atención excesiva para mantener una función adecuada, permitiendo que el anestesiólogo se centre en otras tareas más importantes. Los algoritmos de control más comunes utilizados en CL en anestesia son: modelo de control interno, modelo de control predictivo, control proporcional integral y derivativo (PID) y control basado en inteligencia artificial (F. Padula et al, Optimized PID control of depth of hypnosis in anesthesia, Computer methods and programs in biomedicine 144 (2017) 21-35) . Aun así, la opción más eficaz sigue siendo el control mediante PID, objeto de propuestas recientes y variadas. Además, se ha demostrado cómo el rendimiento alcanzado por un controlador PID correctamente ajustado aplicado en anestesia, tiene el mismo o mejor rendimiento que cualquier otro controlador, independientemente de su complejidad (L. Merigo et al, Event based control of propofol and remifentanil coadministration during clinical anesthesia, in: 2017 3rd International Conference on Event-Based Control, Communication and Signal Processing, IEEE, 2017, pp. 1-8) . Los controladores PID han sido utilizados mediante diferentes enfoques de diseño para abordar el problema de automaticación del acto anestésico. Existen propuestas primarias para la coadministración de PPF y RMF guiadas por BIS (N. Liu et al., Closed-loop coadministration of propofol and remifentanil guided by bispectral index: a randomized multicenter study, Anesthesia & Analgesia 112 (3) (2011) 546- 557) , pero también se presenta un enfoque de diseño más complejos (K. van Heusden et al., Robust miso control of propofol-remifentanil anesthesia guided by the neurosense monitor, IEEE Transactions on Control Systems Technology 26 (5) (2018) 1758-1770) , ofreciendo un ontrolador de salida única multientrada (MISO) para anestesia PPF-RMF guiado por la retroalimentación de una medida de DoH. Se han implementado otros enfoques basados en controladores PID para regular la DoH en anestesia utilizando la administración de PPF y el BIS como una variable controlada, con la diferencia de que Padula y su equipo (F. Padula et al., Optimized PID control of depth of hypnosis in anesthesia, Computer methods and programs in biomedicine 144 (2017) 21-35) establecen un conjunto de doce pacientes virtuales (VPs) representativos de una varianza poblacional relativamente grande que se utiliza para probar la robustez del controlador; y Merigo (L. Merigo et al., Event based control of propofol and remifentanil coadministration during clinical anesthesia, in: 2017 3rd International Conference on Event-Based Control, Communication and Signal Processing (EBCCSP) IEEE, 2017, pp. 1-8) propone un nuevo generador de eventos con altas propiedades de filtrado de ruido, además de un controlador PIDPlus, donde la acción de control se actualiza sólo cuando ocurre un evento. Por último, Merigo y su equipo (L. Merigo et al., A model-based control scheme for depth of hypnosis in anesthesia, Biomedical Signal Processing and Control 42 (2018) 216-229) realizaron un algoritmo de control PID basado en el modelo farmacocinético y farmacodinámico del paciente para la administración de PPF, cuya concentración estimada en el lugar de efecto se utiliza como señal de retroalimentación. Algunos de los trabajos más recientes ofrecen diferentes arquitecturas de esquemas de control PID, como Pawlowski y su equipo (A. Pawlowski et al, Two-degreeof-freedom control scheme for depth of hypnosis in anesthesia, IFACPapersOnLine 51 (4) (2018) 72 77) , que presentan un PID de dos grados de libertad para DoH, utilizando BIS como variable controlada. Presentan dos filtros, uno de primer orden y otro de segundo orden paso bajo, para obtener una respuesta adecuada a los cambios de producidos en la señal de referencia. Otro enfoque destacable es el presentado recientemente por Merigo (L. Merigo et al., Optimized pid control of propofol and remifentanil coadministration for general anesthesia, Communications in Nonlinear Science and Numerical Simulation 72 (2019) 194-212) , donde se propone un sistema optimizado en CL basado en PID para DoH mediante el uso de PPF-RMF y BIS. En este trabajo, el sintonizado se ha realizado mediante la aplicación de PSO (Particle Swarm Optimization) a una cohorte de 13 VPs. Se han identificado una serie de dificultades relacionadas con los problemas en el control en CL del acto anestésico que deben ser abordadas: 1) el control unilateral, debido a la o consideración de fármacos antagonistas; 2) los retardos, las oscilaciones en CL y las inestabilidades aumentan a causa de los retardos; 3) las variables a controlar no son las variables procedentes de los monitores (las mediciones) ; 4) los fármacos presentan un efecto de memoria cuando se administran al paciente; y 5) la sinergia que pueden presentar los distintos fármacos a administrar. Además, en el estado del arte se han podido detectar ciertas limitaciones en la aplicación del control en CL en anestesia, estas son: 1) no existe una propuesta formal que combine los principales estados anestésicos (DoH, ANG y MRX) ; y 2) aunque los algoritmos basados en PID son efectivos para resolver el problema de control, éste no ha sido utilizado de forma multivariable para la perfusión de múltiples fármacos utilizando múltiples variables fisiológicas. En relación con la presente invención se han encontrado los siguientes documentos del estado de la técnica: - ES2297940T3 (2001) , Aparato para proporcionar a un paciente consciente alivio del dolor y la ansiedad asociados con procedimientos médicos o quirúrgicos. Se reivindica un sistema para proporcionar, a través de una gestión conservadora de equipo lógico informático, la entrega de uno o más fármacos amnésicos, analgésicos o sedantes con la monitorización electrónica de una o más condiciones fisiológicas del paciente. - CN1561241B (2002) , Apparatuses and methods for titrating drug deliver y . Se reivindica un sistema de suministro de fármacos a un paciente, en el que dicho sistema comprende: una interfaz de usuario para recibir información del usuario, un dispositivo de suministro de fármacos y un monitor fisiológico regulado por un algoritmo. - US8998808B2 (2004) , System for identifying patient response to anesthesia infusion. Se reivindica un aparato para la asistencia a un profesional durante la administración de un fármaco para la anestesia en un paciente, que comprende: un sistema de procesamiento que recibe los datos correspondientes, una memoria que almacena los datos, un procesador que resuelve la fórmula y una pantalla que muestra los datos resultantes al especialista anestesista. - ES2293366T3 (2006) , Sistema de suministro de fármaco intravenoso controlado por ordenador. Se reivindica un aparato para controlar y dirigir una anestesia IV /o la aplicación de otros fármacos IVs a un paciente. Además, almacena los datos del experto beneficiario del sistema, siendo estos recuperables. - ES2267767 (2007) , System and method of adaptative drug deliver y . Se reivindica un Sistema para determinar y mantener un nivel de concentración de fármaco deseado en un paciente para determinar y mantener un efecto deseado sobre ese paciente. El sistema comprende un conjunto de sensores, una unidad de suministro de fármaco y un controlador en CL de suministro con una entrada acoplada a dicho conjunto y una salida acoplada a dicha unidad de suministro. - JP5792629B2 (2009) , System for controlling the means for injection of anesthetic or sedative agents. Se reivindica un sistema de control de anestesia IV para la inducción y mantenimiento de la sedación, el cual contiene los medios para la adquisición y análisis de la señal de control. - ES2429688 (2013) , Apparatuses and methods for titrating drug deliver y . Se reivindica un Sistema para proporcionar la entrega de fármaco a un paciente. Dicho Sistema comprende una interfaz de usuario, un dispositivo de entrega del fármaco, múltiples monitores fisiológicos y un procesador que integra la interfaz del usuario. - CN103212119B (2013) , Based on target-controlled infusion pump bis anesthesia feedback controller. Se reivindica un sistema de control en lazo cerrazo basado en BIS el cual contiene un algoritmo de control PID borroso. - CN106859592A (2015) , TCI-based (target controlled infusion based) anesthesia depth intelligent control system. Se reivindica un sistema de control TCI inteligente basado en la monitorización del BIS en anestesia. - US20180296759A1 (2016) , Methods and systems for closed-loop control of drug administration. Se reivindica un sistema de control en circuito cerrado para la administración de al menos un fármaco a un paciente, el sistema de control que contiene: un actuador que administra el fármaco, uno o más monitores fisiológicos y un procesador que determina la señal de control. Referente a lo anteriormente expuesto, se pueden encontrar invenciones que reivindican sistemas de control basados en un solo monitor, concretamente, BIS (CN103212119B y CN106859592A) ; otras, de entre los diferentes principales estados anestésicos se refieren únicamente a la sedación (JP5792629B2) . Una de las patentes más avanzadas reivindica un sistema para la perfusión de al menos un fármaco en base a uno o más monitores fisiológicos; sin embargo, dicha invención basa su control en el uso de un controlador de modelos predictivos (en inglés, Model Predictive Controller, MPC) en los que tampoco consta la atención a la sinergia que pueden presentar los fármacos empleados. No existe indicio alguno de que en la actualidad haya un sistema de bombas de perfusión que integre el método de multi-perfusión de fármacos anestésicos con control MIMO-PID aplicado en actos anestésicos vía IV, configurable a la cantidad de fármacos utilizados, a la cantidad de variables de monitorización que se utilicen y que considere la relación sinérgica existente entre los diferentes fármacos empleados. Adicionalmente, no existe indicio alguno de un método que contemple la multi-perfusión de otros tipos de fármacos diferentes a los empleados en anestesia. DESCRIPCIÓN DE LA INVENCIÓN Para ayudar a comprender el método que se ejecuta en un sistema electrónico, inicialmente se presentan los listados con los nombres y su significado de abreviaturas, variables y sistemas. Con las abreviaturas se simplifican nombres largos que aparecen con mucha frecuencia en el texto, con este listado se favorece la comprensión de la lectura hasta la familiarización de los conceptos por parte del lector (si el acrónimo refiere a un nombre en plural este terminará con "s", por ejemplo "IV" se refiere a intravenoso e "IVs" se refiere a intravenosos) . A continuación, se relacionan las abreviaturas por orden alfabético: Abreviatura Significado A Analgesia C (Closed-loop) lazo cerrado D Derivativo D (Depth ofHypnosis) profundidad hipnótica e (Bispectral Index) índice biespectral o monitor equivalente de hipnosis e (Neuromuscular Blockade Index) o monitor equivalente de relajación muscular e (Noxious Stimulation Response Index) o monitor equivalente de nocicepción e Propofol o fármaco equivalente con propiedades hipnóticas e Rocuronio o fármaco equivalente con propiedades de bloqueo muscular e Remifentanilo o fármaco equivalente con propiedades analgésicas I Integral IP (Induction phase) fase de inducción IV Intravenoso o Intravenosa M Sistema controlador PID de múltiple entrada y múltiple salida M Sistema controlador PID de múltiple entrada y salida única MPh (Maintenance phase) fase de mantenimiento MR (Muscle relaxation) relajación muscular OL (Open- loop) lazo abierto P Proporcional PID Sistema controlador Proporcional, Integral y Derivativo RPh (Recover y phase) fase de recuperación SIS Controlador PID de simple entrada y simple salida Syn Controlador MIMO-PID con sinergia Con el listado de variables se pretende que el lector tenga una rápida y fácil familiarización con sus nombres, conceptos que definen y su ubicación en las figuras. Las variables referenciadas en negrita y entre [corchetes] definen matrices, las referenciadas solo en n egrita definen vectores columna (se realiza una transposición para facilitar su escritura e interpretación) , las referenciadas en itática y sin negrita definen variables escalares . A continuación, se relacionan las más importantes según el orden de aparición en la desc cripción: Nombre Definición de la variable y Vector de variables de monitorización (6) yi Monitor eBIS (6.1) Y2 Monitor eNOX (6.2) ys Monitor eNMB (6.3) Upt Vector de perfusión continua de fármacos anestésicos (5) Uptl Perfusión continua del ePPF (5.1) Upt2 Perfusión continua del eRMF (5.2) Upt3 Perfusión continua del eRCN (5.3) dsur Vector de actuaciones quirúrgicas (7) Uol Vector de perfusiones del protocolo manual (4) u0n Perfusión manual del ePPF (4.1) Uoí2 Perfusión manual del eRMF (4.2) Uol3 Perfusión manual del eRCN (4.3) d Vector de bolos manuales al inicio di Bolo manual ePPF Ó2 Bolo manual eRMF ds Bolo manual eRCN D Vector que contiene los bolos por unidad de masa de inducción Di Dosis ePPF D2 Dosis eRMF Ds Dosis eRCN rol Vector de perfusión de la IPh r0ti Perfusión de inducción de ePPF r0i2 Perfusión de inducción de eRMF r0i3 Perfusión de inducción de eRCN R Vector de perfusión constante en IPh Ri Perfusión constante de ePPF r 2 Perfusión eonstante de eRMF r 3 Perfusión eonstante de eRCN p Veetor de la disminueión de la perfusión en MPh P l Disminueión de perfusión ePPF P 2 Disminueión de perfusión eRMF P 3 Disminueión de perfusión eRCN w Peso del paeiente yx Veetor de objetivos de las variables monitorizadas (8) Yt i Objetivo sobre el eBIS (8.1) Yt 2 Objetivo sobre el eNOX (8.2) Yt 3 Objetivo sobre el eNMB (8.3) yf Veetor de variables filtradas de monitorizaeión (10) Y f i Filtrado del eBIS (10.1) Y f 2 Filtrado del eNOX (10.2) Y f 3 Filtrado del eNMB (10.3) fe Veetor de freeueneias de eorte fl Freeueneia de eorte del filtro eBIS f 2 Freeueneia de eorte del filtro eNOX f 3 Freeueneia de eorte del filtro eNMB N Coefieiente de filtrado PID ei Veetor de error de eontrol del eBIS (12) e p i eBIS proporeional (12.1) 6/1 eBIS integral (12.2) e D 1 eBIS derivativo e F1 eBIS derivativo filtrado (12.3) e2 Veetor de error de eontrol del eNOX (13) e P 2 eNOX proporeional (13.1) e / 2 eNOX integral (13.2) e D 2 eNOX derivativo e F 2 eNOX derivativo filtrado (13.3) e3 Veetor de error de eontrol del eNMB (14) e P 3 eNMB proporeional (14.1) e /3 eNMB integral (14.2) e D 3 eNMB derivativo e F 3 eNMB derivativo filtrado (14.3) ep Veetor de errores asimétrieos proporeionales epi eBIS proporcional (12.1) ep2 eNOX proporcional (13.1) ep3 eNMB proporcional (14.1) ei Vector de errores simétricos integrales en eBIS integral (12.2) el2 eNOX integral (13.2) el3 eNMB integral (14.2) eo Vector de errores asimétricos derivativos eD1 eBIS derivativo eD2 eNOX derivativo eD3 eNMB derivativo eF Vector de errores asimétricos derivativos filtrados eFi eBIS derivativo filtrado (12.3) eF2 eNOX derivativo filtrado (13.3) eF3 eNMB derivativo filtrado (14.3) [B] Matriz de asimetría en la acción proporcional P Vector de asimetría en la acción proporcional Pii Ponderación eBIS P22 Ponderación eNOX P33 Ponderación eNMB ythb Vector de umbrales que determinan el valor máximo de p ythbl Umbral p eBIS ythb2 Umbral p eNOX ythb3 Umbral p eNMB [G] Matriz de asimetría en la acción derivativa 1 Vector de asimetría en la acción derivativa 7ii Ponderación eBIS Y22 Ponderación eNOX /33 Ponderación eNMB ythg Vector de umbrales que determinan el valor máximo de 1 ythg1 Umbral 1 eBIS ythg2 Umbral 1 eNOX ythg3 Umbral 1 eNMB Up¡d Vector de perfusiones de control (15) Ui Perfusión de control de ePPF (15.1) u2 Perfusión de control de eRMF (15.2) U3 Perfusión de control de eRCN (15.3) [KP] Matriz de ganancias proporcionales KP Vector de ganancias proporcionales directas Kp¡ Vector de ganancias proporcionales relativo al fármaco i Ganancia proporcional relativa monitor j y al fármaco i [K, ] Matriz de ganancias integrales K, Vector de ganancias integrales directas K, ¡ Vector de ganancias integrales relativo al fármaco i Km Ganancia integral relativa monitor j y al fármaco j y monitor j [T, ] Matriz de tiempos de acción integral T, Vector de tiempos de acción integral directos T, ¡ Vector de tiempos de acción integral relativo al fármaco i T, j Tiempo de acción integral relativa monitor j y al fármaco i [Kd ] Matriz de ganancias derivativas k d Vector de ganancias derivativas directas Kd ¡ Vector de ganancias derivativas relativo al fármaco i Ganancia derivativa relativa monitor j y al fármaco i [Td ] Matriz de tiempos de acción derivativa Td Vector de tiempos de acción derivativa directos Td ¡ Vector de tiempos de acción derivativa relativo al fármaco i Td íj Tiempo de acción derivativa relativa monitor j y al fármaco i [SYN] Matriz de sinergia de fármacos s¡ Vector de sinergias relativa al fármaco i Su Sinergia relativa al controlador C K0i Vector de ganancias sobre el vector de perfusiones del protocolo manual Km Ganancia que modula la perfusión del protocolo manual relativa al ePPF Ko I2 Ganancia que modula la perfusión del protocolo manualrelativa al eRMF Ko í3 Ganancia que modula la perfusión del protocolo manualrelativa al eRCN Ucr Vector de corrección (18) UCr1 Perfusión correctora del ePPF (18.1) UCr2 Perfusión correctora del eRMF (18.2) Uc r3 Perfusión correctora del ePPF (18.3) Yl o Vector de umbrales inferiores de activación de la corrección L i Umbral inferior relativo al eBIS - 2 Umbral inferior relativo al eNOX L3 Umbral inferior relativo al eNMB Yhi Vector de umbrales superiores de activación de la corrección Hi Umbral superior relativo al eBÍS h 2 Umbral superior relativo al eNOX H3 Umbral superior relativo al eNMB Usf Vector de control fiable (20) Usf1 Perfusión fiable del ePPF (20.1) Usf2 Perfusión fiable del eRMF (20.2) Usf3 Perfusión fiable del eRCN (20.3) Ulo Vector de límites inferiores de la perfusión de fármacos uLi Límite inferior relativa al ePPF U¡_2 Límite inferior relativa al eRMF UL3 Límite inferior relativa al eRCN Uhi Vector de límites superiores de la perfusión de fármacos UH1 Límite superior relativa al ePPF UH2 Límite superior relativa al eRMF UH3 Límite superior relativa al eRCN UC| Vector de perfusiones automáticas (22) UC\1 Perfusión automática del ePPF (22.1) UCI2 Perfusión automática del eRMF (22.2) Uc\3 Perfusión automática del eRCN (22.3) umn Vector de resoluciones del sistema de bombas de perfusión continua Umn1 Resolución de la bomba del ePPF Umn2 Resolución de la bomba del eRMF Umn3 Resolución de la bomba del eRCN ti Tiempo de inicio de la ÍPh tm Tiempo de inicio de la Mph tr Tiempo de comienzo de la RPh Ts Tiempo de ejecución del método [ ]' Trasposición de vectores y matrices Con el listado de sistemas se pretende una rápida y fácil ubicación de los mismos tanto en las figuras como en su descripción. A continuación, se relacionan según el orden de aparición en la descripción: Sistema Subsistema (1) paciente (2.1) bomba de perfusión del fármaco hipnótico (ePPF) (2) sistema de bombas (2.2) bomba de perfusión del fármaco analgésico (eRMF) de perfusión (2.3) bomba de perfusión del fármaco relajante (eRCN) (3.1) monitor de la DOH (eBIS) (3) equipos de (3.2) monitor de la ANG (eNOX) monitorización (3.3) monitor de la MRX (eNMB) (24) sistema de control multi-PID con sinergia (SynPlD) (9.1) filtro de la hipnosis (9) banco de filtros (9.2) filtro de la nocicepción (9.3) filtro de la relajación muscular 28: generador de error de la DoH (11) generador de 29: generador de error de la ANG errores de control 30: generador de error de la MRX (16) controlador multivaria ble y con sinergia MIMO-PID, denotado por la matriz [PID] (25) subsistema de (25.1) SISO-PID eBIS-ePPF, denotado por la variable C11 control MISO-PID-ePPF, (25.2) SISO-PID eNOX-ePPF, denotado por la variable C12 denotado por el vector (25.3) SISO-PID eNMB-ePPF, denotado por la variable C13 Cl (26) subsistema de (26.1) SISO-PID eBIS-eRMF, denotado por la variable C2i control MISO-PID-eRMF, (26.2) SISO-PID eNOX-eRMF, denotado por la variable C22 denotado por el vector (26.3) SISO-PID eNMB-eRMF, denotado por la variable C23 C2 (27) subsistema de (27.1) SISO-PID eBIS-eRCN, denotado por la variable C31 control MISO-PID-eNMB, (27.2) SISO-PID eNOX-eRCN, denotado por la variable C32 denotado por el vector (27.3) SISO-PID eNMB-eRCN, denotado por la variable C33 C3 (19.1) subsistema de seguridad de la infusion del ePPF (19) sistema de (19.2) subsistema de seguridad de la infusion del eRMF seguridad (19.3) subsistema de seguridad de la infusion del eRCN (21.1) subsistema cuantificador de la infusion del ePPF (21) sistema (21.2) subsistema cuantificador de la infusion del eRMF cuantificador (21.3) subsistema cuantificador de la infusion del eRCN (23) sistema de conmutación La presente invención se refiere a un sistema para la multi-perfusión automática de fármacos con sinergia a pacientes por IV, que comprende: - un subsistema de bombas de perfusión (2) , configurado para suministrar al paciente (1) una cantidad de fármacos; - un subsistema de monitorización (3) , configurado para medir un conjunto de variables fisiológicas con información del estado del paciente; - un subsistema de control (24) , configurado para adaptar la cantidad suministrada de cada fármaco (5) por el subsistema de bombas de perfusión (2) , basado en una cantidad de perfusión inicial predeterminada (4) , unos valores objetivo de monitorización (8) , una realimentación (6) de las variables fisiológicas medidas y una sinergia entre los fármacos, donde el subsistema de control comprende: o un módulo generador de errores de control (11) configurado para calcular errores (12, 13, 14) basado en los valores objetivo de monitorización (8) y la realimentación de las variables fisiológicas medidas; o un controlador (16) configurado para determinar una perfusión de control (15) para cada uno de los fármacos basada en los errores (12, 13, 14) calculados por el módulo generador de errores de control (11) y la cantidad de perfusión inicial predeterminada (4) ; o un módulo de corrección (17) configurado para recibir las medidas del conjunto de variables fisiológicas desde el subsistema de monitorización (3) y modificar la perfusión de control (15) del controlador (16) , incrementando en función de un umbral superior o disminuyendo en función de un umbral inferior, dicha perfusión para conducir las variables fisiólogicas a un rango seguro preestablecido para las variables fisiológicas; y o un módulo de seguridad (19) configurado para recibir la perfusión de control (15) de cada fármaco y modificar dicha perfusión limitándola entre dos valores de perfusión, un límite inferior y otro límite superior, que aseguran la no hipermedicación para cada fármaco, lo que permite trabajar a las variables fisiológicas en un rango serguro. Adicionalmente, se contemplan en el subsistema de control unos modulos de protección frente a sobredosificación o infradosificación con los módulos de seguridad (19) y corrección (17) configurados para mantener la perfusión de fármacos en unos valores seguros. En una de las realizaciones de la invención, se divulga un sistema de multi-perfusión con sinergia de fármacos anestésicos con sinergia mediante control en CL MIMO-PID (SynPlD) aplicado en actos anestésicos vía IV, este sistema es multidimensional configurable a la cantidad de fármacos utilizados y configurable a la cantidad de variables de monitorización que se utilicen. El sistema se implementa en un dispositivo electrónico, donde se ejecutan los siguientes pasos: paso 1.- obtener un vector de variables de monitorización de hipnosis (DoH) , analgesia (ANG) y relajación muscular (MRX) , adicionalmente otras variables de monitorización pueden ser usadas. De ahora en adelante se refiere a ellos como vector de variables de monitorización (6) que pueden ser el BIS, NOX y NMB u otros monitores equivalentes denotados como eBIS, eNOX y eNMB, de la DoH, ANG y MRX, respectivamente. El valor del vector de variables de monitorización (6) depende principalmente de la perfusión de los fármacos con propiedades hipnóticas, analgésicas y /o bloqueantes musculares, como son el propofol (PPF) , el remifentanilo (RMF) y el rocuronio (RCN) , aunque fármacos equivalentes pueden ser usados denotados como ePPF, eRMF y eRCN, adicionalmente otros fármacos anestésicos pueden ser usados. De ahora en adelante se refiere a ellos como como fármacos o drogas anestésicas que se infusionan al paciente vía IV; estos conforman el vector de perfusión de fármacos anetstésicos (5) . El vector de perfusión de fármacos anestésicos (5) se administra al paciente (1) mediante un sistema de bombas de perfusión (2) . Los equipos de monitorización (3) recogen sobre el paciente (1) los efectos de los fármacos anestésicos y el vector de actuaciones quirúrgicas (7) del médico cirujano en una intervención; paso 2.- para los fármacos anestésicos considerados, calcular el vector de perfusión de fármacos anestésicos (5) mediante un sistema de control MIMO-PID on sinergia (SynPlD) (24) a partir del vector de variables de monitorización (6) , del vector de perfusiones del protocolo manual (4) y del vector de objetivos de las variables monitorizadas (8) ; paso 3.- proceder a la limpieza de ruido y artefactos del vector de variables de monitorización (6) mediante un banco de filtros (9) para obtener un vector de variables filtradas de monitorización (10) ; paso 4.- calcular los vectores de errores de control (12, 13, 14) mediante un generador de errores de control (11) a partir del vector de variables filtradas de monitorización (10) y del vector de objetivos de las variables monitorizadas (8) ; particularmente consiste en calcular el vector de error de control del monitor eBIS (12) mediante un generador de error de la DoH (28) a partir de la monitorización filtrada de la hipnosis mediante el monitor eBIS (10.1) y de su valor objetivo (8.1) ; calcular el vector de error de control del monitor eNOX (13) mediante un generador de error de la ANG (29) a partir de la monitorización filtrada de la ANG mediante el monitor eNOX (10.2) y de su valor objetivo (8.2) ; calcular el vector de error de control del monitor eNMB (14) mediante un generador de error de la RMX (30) a partir de la monitorización filtrada de la MRX mediante el monitor eNMB (10.3) y de su valor objetivo (8.3) ; paso 5.- calcular un vector de perfusiones de control (15) mediante un controlador multivariable y con sinergia MIMO-PID (16) , compuesto por tres subsistemas de control MISO-PID (25, 26, 27) a partir de los vectores de errores de control (12, 13, 14) y del vector de perfusiones del protocolo manual (4) . Cada perfusión de control PID está formada por la suma de una perfusión proporcional, una perfusión integral y una perfusión derivativa. paso 6.- calcular un vector de corrección (18) mediante un sistema corrector de perfusiones (17) a partir del vector de variables filtradas de monitorización (10) ; paso 7.- calcular un vector de control fiable (20) mediante un sistema de seguridad (19) a partir del vector de perfusiones de control (15) y del vector de corrección (18) ; paso 8.- calcular un vector de perfusiones automáticas (22) mediante un sistema cuantificador (21) a partir del vector de control fiable (20) ; paso 9.- definir el vector de perfusión de fármacos anestésicos (5) aplicado al paciente (1) mediante un sistema de conmutación (23) a partir del vector de perfusiones del protocolo manual (4) y del vector de perfusiones automáticas (22) calculadas por el sistema de control SynPID (24) ; paso 10.- calcular la perfusión de control del fármaco ePPF (15.1) mediante un subsistema de control MISO-PID-ePPF (25) compuesto de tres controladores SISO-PID (25.1, 25.2, 25.3) que relacionan la perfusión del fármaco ePPF con los vectores de errores de control (12, 13, 14) ; paso 11.- calcular la perfusión de control del fármaco eRMF (15.2) mediante un subsistema de control MISO-PID-eRMF (26) compuesto de tres controladores SISO-PID (26.1, 26.2, 26.3) que relacionan la perfusión del fármaco eRMF con los vectores de los errores de control (12, 13, 14) ; paso 12.- calcular la perfusión de control del fármaco eRCN (15.3) mediante un subsistema de control MISO-PID-eNMB (27) compuesto de tres controladores SISO-PID (27.1, 27.2, 27.3) que relacionan la perfusión del fármaco eRCN con los vectores de los errores de control (12, 13, 14) . El sistema de multi-perfusión de fármacos anestésicos con sinergia mediante control en CL MIMO-PID aplicado en actos anestésicos vía IV es denominado sistema de control SynPID. SynPID necesita varios tipos de información para obtener el vector de perfusión de fármacos anestésicos (5) sobre los pacientes, a continuación se detallan las acciones y cálculos que hay que hacer en cada paso descrito anteriormente. El paso 2) ejecutado por el sistema de control SynPID adicionalmente comprende adquirir la información: 2.1.- Medir el vector de variables de monitorización (6) , Donde y es el vector de variables de monitorización (6) ; y? es el monitor eBIS; y2 es el monitor eNOX; y3 es el monitor eNMB y el resto de componentes del vector desde y4 a yr son otras posibles incorporaciones de monitores. El superíndice T significa transposición del vector. 2.2.- Definir el vector de perfusiones del protocolo manual (4) conocido como protocolo médico manual en lazo abierto (OP) , u =\u u u í [Z2] Donde uo es el vector de perfusiones del protocolo manual (4) ; uol? es la perfusión del protocolo manual para el ePPF; uol2 es la perfusión del protocolo manual para el eRMF; uol3 es la perfusión del protocolo manual para el eRCN y el resto de componentes del vector desde uol4 a uols son otras posibles decisiones de otros fármacos incorporados al sistema. 2.3.- Calcular el vector de perfusiones del protocolo manual (4) en OP, uol (0 = d (, -) + rol ( / ) , [2. 3] 2.3.1.- Donde d es el vector de bolos manuales en el momento de iniciarse el IPh en el tiempo t, D = [A D2 ... D, ] \ Donde D es el vector que contiene los bolos por unidad de masa de cada fármaco; W es el peso del paciente y Ts es el periodo de ejecución. 2.3.2.- Donde ro es el vector de perfusión de los fármacos anestésicos en IPh, r nx [2. 5] R = K r 2 - RA . p = [^i r 2 - p.Y ' Donde R es el vector de perfusión constante en IPh, desde t¡ donde comienza la IPh hasta tm donde comienza la MPh de la anestesia; P es el vector de la disminución de la perfusión en MPh; y W es el peso del paciente. 2.4.- Fijar el vector de objetivos de las variables monitorizadas (8) , y-r = [j-Vi y-n ••• Err] 1 ^ ^ Donde yT es el vector de objetivos de las variables monitorizadas (8) ; yT1 es el objetivo sobre el monitor eBIS; y2 es el objetivo sobre el monitor eNOX; y3 es el objetivo sobre el monitor eNMB y el resto de componentes del vector desde y4 a yr son otros posibles objetivos sobre las nuevas incorporaciones de monitores al método. El paso 3) ejecutado en el sistema de control SynPID adicionalmente comprende un banco de filtros (9) para: 3.1.- Calcular el vector de variables filtradas de monitorización (10) , Donde yf es el vector de variables filtradas de monitorización; yf1 es el filtrado del monitor eBIS; yf2 es el filtrado del monitor eNOX; yf3 es el filtrado del monitor eNMB y el resto de componentes del vector desde yf4 a yfr son los filtrados sobre las nuevas incorporaciones de monitores al sistema. 3.2.- Definir un banco de filtros (9) , basados en filtros paso bajo de orden nH, Donde y es el vector de variables de monitorización (6) ; yf es el vector de variables filtradas de monitorización (10) ; nH es el orden del filtro; fc es el vector de frecuencias de corte del banco de filtros (9) dada por, fc = [ /i Z2 /, f [3. 3] Donde fc es el vector de frecuencias de corte; f1 es la frecuencia de corte del filtro eBIS; f2 es la frecuencia de corte del filtro eNOX; f3 es la frecuencia de corte del filtro eNMB y el resto de componentes del vector desde f4 a fr son las frecuencias de corte del sistema de limpieza sobre las nuevas incorporaciones de filtros al sistema. El vector fc se calcula mediante la ecuación, fC = r *yíL . [3.4] A n Donde N es el coeficiente de filtrado PID; y TD es el vector de tiempos de acción derivativa directo. El paso 4) ejecutado en el sistema de control SynPlD adicionalmente comprende un generador de errores de control (11) para: 4.1.- Calcular un vector de error de control del monitor eBIS e1 (12) con el generador de error de la DoH (28) , un vector de error de control del monitor eNOX e2 (13) con el generador de error de la ANG (29) , y un vector de error de control del monitor eNMB e3 (14) con el generador de error de la RMX (30) , cada uno con sus componentes proporcional, integral y derivativa (12.1, 12.2, 12.3) , (13.1, 13.2, 13.3) y (14.1, 14.2, 14.3) . Los errores correspondientes desde e4 a er son los relativos a los nuevos monitores incorporados al sistema de control, e1 [ep1 ej 1 eF1 ]T [4. 1] el 2 eF 2 ] er [ePi eír e» ]T Donde eP¡ se refiere al error asimétrico proporcional del PID; e¡ se refiere al error simétrico integral del PID; eF¡ se refiere al error derivativo filtrado del PID; y ¡ se refiere a un número entero comprendido entre 1 y r, para referenciar a la variable monitorizada. 4.2.- Calcular los errores asimétrico proporcional, simétrico integral y asimétrico derivativo de cada controlador SISO-PID, utilizando el vector yf de variables filtradas de monitorización (10) y el vector yT de objetivos de las variables monitorizadas (8) , Donde yT es el vector de objetivos de las variables monitorizadas (8) ; yf es el vector de variables filtradas de monitorización (10) ; I es la matriz identidad; Td es el vector de tiempos de acción derivativa directo y N es el coeficiente de filtrado PID. 4.2.1.-[B] es la matriz con la influencia del "weighting set point en la acción proporcional de los PIDs, se conoce también como la asimetría en el error proporcional, Donde f3¡¡ es el peso sobre el target de la acción proporcional j, thb + 2, y f < y [4. 4] t y t - y thb i, y f ^ y t Donde ythb es un vector de umbrales que determinan el valor máximo de p. 4.2.2.- G es la matriz con la influencia del "weighting set point en la acción derivativa de los PIDs; se conoce también como la asimetría en el error derivativo, Donde y¡¡ es el peso sobre el target de la acción derivativa j, -y f - y % +2 yf < y [4. 6] hg t y = í y T-yt 1» y f ^ y t Donde ythg es un vector de umbrales que determinan el valor máximo de y. 4.3.- Calcular el vector de error de control del monitor eBIS (12) mediante un generador de error de la DoH (28) a partir de la monitorización filtrada de la DoH mediante el monitor eBIS (10.1) y de su valor objetivo (8.1) , ep\ = ~P \ i 'yYi+ y f\ e¡ i = - y T i + y f i [4. 7] e Di = ~ 7 n ' y n + y f l JD11 u CF1 e F1 ~ e D1 T de N dt 4.4.- Calcular el error de control del monitor eNOX (13) mediante un generador de error de la ANG (29) a partir de la monitorización filtrada de la ANG mediante el monitor eNOX (10.2) y de su valor objetivo (8.2) , 2 p 22-yT2 + y f 2 -12 _ yT2+ y/ 2 [4. 8] °D 2 Y 22 'Y t 2 Y f 2 T1 D 22 d ue CF 2 - F 2 ' e D 2 N dt 4.5.- Calcular el vector de error de control del monitor eNMB (14) mediante un generador de error de la MRX (30) a partir de la monitorización filtrada de la RMX mediante el monitor eNMB (10.3) y de su valor objetivo (8.3) , eP3= ~ A 3 y ti, + y f ?, ei 3 = "yT 3 + y/ 3 [4. 9] e D2 = _ ? 33 'y r 3 + y / 3 T1 D33 d ue CF 3 eF3 _ eD3 N dt El paso 5) ejecutado por el sistema de control SynPlD adicionalmente comprende un controlador multivariable y con sinergia MIMO-PID (16) para: 5.1.- Definir el vector de perfusiones de control (15) , Donde u1 es la perfusión de control del ePPF (15.1) ; u2 es la perfusión de control del eRMF (15.2) ; u3 es la perfusión de control del eRCN (15.3) y desde u4 a us las perfusiones de los nuevos fármacos que puedan incorporarse al sistema de control. 5.2.- Calcular el vector de perfusiones de control (15) mediante un controlador multivariable y con sinergia MIMO-PID (16) , los vectores de error de control de los monitores eBIS (12) , eNOX (13) y eNMB (14) y el vector de perfusiones del protocolo manual (4) , Up¡d = [ H D ]{S Y N ]+ K ol-uol, [5- 2] Donde: 5.2.1.- [PID] es la matriz de controladores SISO-PID que componen el controlador multivariable y con sinergia MIMO-PID (16) , Donde C¡¡ es el controlador SISO-PID relativo al monitor j y al fármaco /; Ci es el subsistema de control MISO-PID-ePPF; C2 es el subsistema de control MISO-PID-eRMF; y C3 es el subsistema de control MISO-PID-eNMB. Los C¡j están definidos por la matriz de ganancias proporcionales [KP]; la matriz de ganancias integrales [K|] y la matriz de ganancias derivativas [KD]: K p = diag ([Kp ]) [5. 7] K j = diag ([K j ]) [5. 8] K D = diag ([K D ]) [5. 9] Donde KP¡¡ es la ganancia proporcional relativa monitor j y al fármaco /; K\¡¡ es la ganancia integral relativa monitor j y al fármaco /; y KD¡¡ es la ganancia derivativa relativa monitor j y al fármaco /; KPi es el vector de ganancias proporcionales relativas al fármaco /; KIi es el vector de ganancias integrales relativas al fármaco /; KDi es el vector de ganancias derivativas relativas al fármaco /; KP es el vector de ganancias proporcionales directas relativas al fármaco j y al monitor j; KI es el vector de ganancias integrales directas relativas al fármaco j y l monitor j; y KD es el vector de ganancias derivativas directas relativas al fármaco j y al monitor _/'. 5.2.2.-[SYN] es la matriz de sinergia de fármacos: Donde S, y es la sinergia relativa al controlador Qf S¡ es el vector de sinergias relativa al fármaco /. 5.2.3.- Koi es un vector de ganancias sobre el vector de perfusiones del protocolo manual (4) , K , = [ K i Kn K ]T [5. 11] Donde K0/1 es la ganancia que modula la perfusión del protocolo manual del ePPF (4.1) ; K0/2 es la ganancia que modula la perfusión del protocolo manual del eRMF (4.2) ; K0/3 es la ganancia que modula la perfusión del protocolo manual del eRCN (4.3) y desde Ka/4 a Ka/S son las ganancias que modulan las perfusiones del protocolo manual de los nuevos fármacos que puedan incorporarse al sistema de control; Donde yT es el vector de objetivos de las variables monitorizadas (8) ; yf es el vector de variables filtradas de monitorización (10) e yLO es el vector de umbrales inferiores de activación de la corrección. 5.3.- Definir los subsistemas de control MISO-PID (25, 26, 27) a partir de los vectores de los errores de control (12, 13, 14) y del vector de perfusiones del protocolo manual (4) , «i Cn mSl! + Cn 'Sn + ... + Clr -Slr + Koñ -uon u2 C21 -S2l + C22~S22 +... + C2.- S2r + Ko¡2 -uol2 ^3] Donde C¡¡ es el controlador PID relativo al monitor ¡ y al fármaco /; S¡¡ es la sinergia relativa al controlador C¡¡; y K0u es la ganancia aplicada a las perfusiones del protocolo manual del fármaco u0/i. 5.3.1.- Definir cada controlador SISO-PID (25.1....... 27.3) mediante los vectores de los errores de control (12, 13, 14) y las ganancias definidas en el paso 5.2.1, Cy = P y + /. y. + D. y. ' [5. 14] Donde / identifica el fármaco (15.i) y ¡ identifica el monitor (10.j) ; P¡¡ es la acción proporcional, l¡¡ es la acción integral y D¡¡ es la acción derivativa. 5.3.2.- Calcular la acción proporcional, integral y derivativa; P y ~ K Pij 'e Pj íy = K n j\e, jdT, [5. 15] deFi D =^ D r - d f Donde KP¡¡ es la ganancia proporcional asociada al medicamento / y al monitor¡; eP¡ el error proporcional relativo al monitor¡; K¡¡ la ganancia integral asociada al medicamento / y al monitor; e¡ el error integral relativo al monitor ¡; Kd¡¡ la ganancia derivativa asociada al medicamento / y al monitor; y eF¡ el error derivativo filtrado relativo al monitor ¡. El paso 6) ejecutado por el sistema de control SynPlD adicionalmente comprende un sistema corrector de perfusiones (17) para: 6.1.- Definir el vector de corrección (18) , ucr = \ Lu cr , 1 u cr .2 ... u crs 1 JT, [6- 1] Donde ucr1 es la perfusión correctora del fármaco ePPF (18.1) ; ucr2 es la perfusión correctora del fármaco eRMF (18.2) ; ucr3 es la perfusión correctora del fármaco eRCN (18.3) ; y el resto de componentes del vector desde ucr4 a ucrs son otras posibles correcciones de otros fármacos incorporados al sistema. 6.2.- Calcular el vector de corrección (18) a partir del vector de variables filtradas de monitorización (10) , Donde [KP] es la matriz de ganancias proporcionales, ecuación [5. 4]; [SYN] es la matriz de sinergia, ecuación [5. 10]; yf es el vector de variables filtradas de monitorización (10) . 6.2.1.- yHi es el vector de umbrales superiores de activación de la corrección, H 2 ... H r f [6.3] Donde H1 es el umbral superior relativo al monitor eBIS; H2 es el umbral superior relativo al monitor eNOX; H3 es el umbral superior relativo al monitor eNMB; y el resto de componentes de los vectores desde H4 hasta Hr son los umbrales superiores de otras posibles incorporaciones de monitores al sistema. 6.2.2.- yLO es el vector de umbrales inferiores de activación de la corrección, y lo = [A h ... l , ] 1 I6- 4! Donde L1 es el umbral inferior relativo al monitor eBIS; L2 es el umbral inferior relativo al monitor eNOX; L3 es el umbral inferior relativo al monitor eNMB; y el resto de componentes de los vectores desde L4 hasta Lr son los umbrales inferiores de otras posibles incorporaciones de monitores al sistema. El paso 7) del sistema de control SynPlD adicionalmente comprende de un sistema de seguridad (19) para: 7.1.- Definir el vector de control fiable (20) , Donde usf1 es la perfusión fiable del fármaco ePPF (20.1) ; usf2 es la perfusión fiable del fármaco eRMF (20.2) ; usf3 es la perfusión fiable del fármaco eRCN (20.3) ; y el resto de componentes del vector desde usf4 a usfs son otras posibles perfusiones fiables de otros fármacos incorporados al sistema. 7.2.- Calcular el vector de control fiable (20) a partir del vector de perfusiones de control (15) y del vector de corrección (18) , UHI Upid + Ucr ^ UHI « s f = f u pid ^ U cr ? U LO < U pid + U cr ^ U HI [1] [7.2] ULO Upid + Ucr ^ ULO Donde ucr es el vector de corrección (18) y up¡d es el vector de perfusiones de control (15) . 7.2.1.- uHi es el vector de límites superiores de la perfusión de fármacos, Donde uH1 es límite superior de la perfusión relativa al fármaco ePPF; uH2 es límite superior de la perfusión relativa al fármaco eRMF; uH3 es límite superior de la perfusión relativa al fármaco eRCN; y el resto de componentes de los vectores desde uH4 hasta uHs son los límites superiores de las perfusiones relativas a otras posibles incorporaciones de fármacos al sistema. 7.2.2.- Ulo es el vector de límites inferiores de la perfusión de fármacos, ULO [«L1 *L2 «l r [1] [7. 4] Donde uL1 es el límite inferior de la perfusión relativa al fármaco ePPF; uL2 es el límite inferior de la perfusión relativa al fármaco eRMF; uL3 es el límite inferior de la perfusión relativa al fármaco eRCN; y el resto de componentes de los vectores desde uL4 hasta uLs son los límites inferiores de las perfusiones relativas a otras posibles incorporaciones de fármacos al sistema. El paso 8) ejecutado por el sistema de control SynPiD adicionalmente comprende un sistema cuantificador (21) para: 8.1.- Definir el vector de perfusiones automáticas (22) , Ucl= k /1 Ucl2 ••• UclS Í> [8' 1] Donde uc11 es la perfusión automática del fármaco ePPF (22.1) ; uc2 es la perfusión automática del fármaco eRMF (22.2) ; uc3 es la perfusión automática del fármaco eRCN (22.3) ; y el resto de componentes del vector desde uc4 a ucs son otras posibles perfusiones automáticas en CL de otros fármacos incorporados al sistema. 8.2.- Calcular el vector de perfusiones automáticas (22) a partir del vector de control fiable (20) , Donde usf es el vector de control fiable (20) y umn es el vector de resoluciones del sistema de bombas de perfusión continua (2) ; 8.2.1.- umin es el vector de resoluciones de cada bomba de perfusión de fármacos; [8. 3] U mu \Umn 1 Donde umn1 es resolución bomba de perfusión ePPF; umn2 es resolución bomba de perfusión eRMF; umn3 es la resolución bomba de perfusión eRCN; y el resto de componentes del vector desde umn4 a umns son las resoluciones de otras posibles bombas de perfusión de nuevos fármacos incorporados al sistema de control. El paso 9) ejecutado por el sistema de control SynPlD adicionalmente comprende un sistema de conmutación (23) para: 9.1.- Definir el vector de perfusión de fármacos anestésicos (5) , U p t = [ * V l U P'2 • • • « J > [ 9 ' ^ Donde uptí es la perfusión del fármaco ePPF (5.1) ; upt2 es la perfusión continua del fármaco eRMF (5.2) ; upt3 es la perfusión del fármaco eRCN (5.3) ; y el resto de componentes del vector desde upt4 a upts son otras posibles perfusiones de nuevos fármacos incorporados al sistema de control. 9.2.- Calcular el vector de perfusión de fármacos anestésicos (5) a partir del vector de perfusiones del protocolo manual (4) y el vector de perfusiones automáticas (22) , Donde uo es el vector de perfusiones del protocolo manual (4) ; ud es el vector de perfusiones automáticas (22) ; t¡ es el tiempo de inicio de la lPh; tm es el tiempo de inicio de la MPh; y tr es el tiempo de comienzo de la RPh. El paso 10) ejecutado por el sistema de control SynPlD adicionalmente comprende de un subsistema de control MlSO-PlD-ePPF (25) para: 10.1.- Definir el subsistema de control MlSO-PlD-ePPF (25) como un conjunto de controladores 10.2.- Calcular la perfusión de control del ePPF (15.1) ; a partir de los controladores SlSO-PlD (25.1, 25, .2, 25.3) , de los vectores de los errores de control (12, 13, 14) y de la perfusión de ePPF del protocolo manual (4.1) , ui C i ^ i + K0ii'U0ii [10. ul Cu mSl ¡ + C12 'Sl2 + • • • + Clr -Slr + K oñ uoll 2] Donde Si es un vector formado por la primera fila de [SYN]; Cy es el controlador PlD relativo al monitor ¡ y al fármaco ePPF; Sy es un vector formado por la sinergia relativa al controlador Cy; y Koy es la ganancia aplicada a la perfusión del protocolo manual del ePPF. El paso 11) ejecutado por el sistema de control SynPlD adicionalmente comprende de un subsistema de control MlSO-PlD-eRMF (26) para: 11.1.- Definir el subsistema de control MlSO-PlD-eRMF (26) como un conjunto de controladores 11.2.- Calcular la perfusión de control del eRMF (15.2) ; a partir de los controladores SlSO-PlD (26.1, 26, .2, 26.3) , de los vectores de los errores de control (12, 13, 14) y de la perfusión de eRMF del protocolo manual (4.2) , U 2 ~ C 2 * ^ 2 + Koi2 'UoI2 [1 1 .2 ] «2 C2l'S2l + C22 'S22 +... + C2.- S2r + Ko¡2 -uol2 Donde S2 es un vector formado por la segunda fila de [SYN]; C2¡ es el controlador PlD relativo al monitor j y al fármaco eRMF; S2y es un vector formado por la sinergia relativa al controlador C2¡; y K0 2 es la ganancia aplicada a la perfusión del protocolo manual del eRMF. El paso 12) ejecutado por el sistema de control SynPlD adicionalmente comprende de un subsistema de control MlSO-PlD-eNMB (27) para: 10.1.- Definir el subsistema de control MlSO-PlD-eNMB (27) como un conjunto de controladores SlSO-PlD, C . 1]3 = [C31 c [12 32 12.2.- Calcular la perfusión de control del eRCN (15.3) ; a partir de los controladores SISO-PID (27.1, 27, .2, 27.3) , de los vectores de los errores de control (12, 13, 14) y de la perfusión de eRCN del protocolo manual (4.3) , U3 C3 '83 + K0¡ 3 'Uol 3 [12.2] «3 = C3l ~S3l + C32 ~S32 +... + C3r ~S3r + K0¡3 nol3 Donde S3 es un vector formado por la tercera fila de [SYN]; C3¡ es el controlador PID relativo al monitor j y al fármaco eRCN; S3¡ es la sinergia relativa al controlador C3; y K03 es la ganancia aplicada a la perfusión del protocolo manual del eRCN. El paso 13) ejecutado por el sistema de control SynPlD adicionalmente puede comprender de varios controladores MISO-PID para nuevos fármacos: 13.1.- Definir el controlador MISO-PID para el fármaco i como un conjunto de controladores SISO-PID, C, [C, 1 c, 2 C 1' [13. 1] Donde i=4...s, identifica los nuevos fármacos; y r identifica el número de monitores. 13.2.- Calcular la perfusión de control del fármaco i; a partir de los controladores SISO-PID, de los errores de control y de la perfusión del fármaco i del protocolo manual (4.i) , u q - s, . + K i i U i i [13.2] En otro aspecto de la invención, se divulga un dispositivo de multi-perfusión de fármacos anestésicos con sinergia mediante control en CL MIMO-PID (SynPID) aplicado en actos anestésicos vía IV, este método es multidimensional configurable a la cantidad de fármacos utilizados y a la cantidad de variables de monitorización que se utilicen, en una cualquiera de las realizaciones del primer aspecto de la invención. El dispositivo de multi-perfusión de fármacos anestésicos con sinergia mediante control en CL MIMO-PID (SynPID) aplicado en actos anestésicos vía IV comprende al menos un banco de filtros (9) ; un generador de errores de control (11) ; un controlador multivariable y con sinergia MIMO-PID (16) ; un sistema corrector de perfusiones (17) ; un sistema de seguridad (19) ; un sistema cuantificador (21) ; y un sistema de conmutación (23) . El dispositivo de multi-perfusión de fármacos anestésicos con sinergia mediante control en CL MIMO-PID (SynPlD) aplicado en actos anestésicos vía IV puede ser un dispositivo electrónico o electromecánico. BREVE DESCRIPCIÓN DE LOS DIBUJOS Figura 1.- Muestra la topología del sistema de control SynPlD (24) en su forma más general en la que se detalla el paciente (1) , al que se le suministra el vector de perfusión de fármacos anestésicos (5) a través de un sistema de bombas de perfusión (2) y del que se extraen las medidas del vector de variables de monitorización (6) a través de los equipos de monitorización (3) . Las bombas de perfusión controlan los fármacos ePPF (2.1) , eRMF (2.2) y eRCN (2.3) . Los equipos de monitorización (3) recogen información de las siguientes variables: 1) DoH (3.1) mediante el monitor eBIS (6.1) ; 2) ANG (3.2) mediante el monitor eNOX (6.2) ; y 3) MRX (3.3) mediante el monitor eNMB (6.3) . El vector de variables de monitorización (6) es la base de realimentación del sistema de control SynPlD (24) , que además utiliza la información sobre: 1) el vector de objetivos de las variables monitorizadas (8) : target del eBIS (8.1) , target del eNOX (8.2) y target del eNMB (8.3) ; y 2) el vector de perfusiones del protocolo manual (4) : protocolo manual del ePPF (4.1) , protocolo manual del eRMF (4.2) y protocolo manual del eRCN (4.3) . Figura 2.- Muestra un detalle pormenorizado del sistema de control SynPID (24) que presenta como entradas los vectores de: 1) el vector de perfusiones del protocolo manual (4) ; 2) el vector de objetivos de las variables monitorizadas (8) ; y 3) los valores del vector de variables de monitorización (6) . El sistema de control SynPID (24) está compuesto por: 1) un banco de filtros (9) para obtener un vector de variables filtradas de monitorización (10) a partir del vector de variables de monitorización (6) ; el banco de filtros (9) está compuesto por tres filtros uno para limpiar y filtrar el eBIS (9.1) , otro para limpiar y filtrar el eNOX (9.2) y otro para limpiar y filtrar el eNMB (9.3) ; 2) un generador de errores de control (11) para obtener los vectores de los errores de control (12, 13, 14) a partir del vector de variables filtradas de monitorización (10) y del vector de objetivos de las variables monitorizadas (8) ; particularmente consiste en obtener el vector de error de control del monitor eBIS (12) ; obtener el vector de error de control del monitor eNOX (13) y obtener el vector de error de control del monitor eNMB (14) ; 3) un controlador multivariable y con sinergia MIMO-PID (16) para obtener un vector de perfusiones de control (15) a partir de los vectores de los errores de control (12, 13, 14) y del vector de perfusiones del protocolo manual (4) ; 4) un sistema corrector de perfusiones (17) para obtener un vector de corrección (18) a partir del vector de variables filtradas de onitorización (10) ; 5) un sistema de seguridad (19) obtener un vector de control fiable (20) a partir del vector de perfusiones de control (15) y del vector de corrección (18) ; 6) un cuantificador (21) para obtener un vector de perfusiones automáticas (22) a partir del vector de control fiable (20) ; y 7) un sistema de conmutación (23) para obtener el vector de perfusión de fármacos anestésicos (5) a partir del vector de perfusiones del protocolo manual (4) y del vector de perfusiones automáticas (22) . Figura 3.- Muestra un detalle pormenorizado del generador de errores de control (11) que presenta como entradas los vectores de: 1) el vector de objetivos de las variables monitorizadas (8) ; y 2) el vector de variables filtradas de monitorización (10) . El generador de errores de control (11) está compuesto por: 1) un generador de error de la DoH (28) donde se obtiene el vector de error de control del monitor eBIS (12) , donde se explicitan el error proporcional eBIS (12.1) , el error integral eBIS (12.2) y el error derivativo eBIS (12.3) , a partir de la monitorización filtrada de la DoH mediante el monitor eBIS (10.1) y de su valor objetivo (8.1) ; 2) un generador de error de la ANG (29) donde se obtiene el vector de error de control del monitor eNOX (13) , donde se explicitan el error proporcional eNOX (13.1) , el error integral eNOX (13.2) y el error derivativo eNOX (13.3) , a partir de la monitorización filtrada de la ANG mediante el monitor eNOX (10.2) y de su valor objetivo (8.2) ; y 3) un generador de error de la MRX (30) donde se obtiene el vector de error de control del monitor eNMB (14) , donde se explicitan el error proporcional eNMB (14.1) , el error integral eNMB (14.2) y el error derivativo eNMB (14.3) , a partir de la monitorización filtrada de la MRX mediante el monitor eNMB (10.3) y de su valor objetivo (8.3) . Figura 4.- Muestra un detalle pormenorizado del controlador multivariable y con sinergia MIMO-PID (16) que presentan como entradas los vectores de los errores de control (12, 13, 14) y del vector de perfusiones del protocolo manual (4) . El controlador multivariable y con sinergia MIMO-PID (16) está compuesto por varios subsistemas de control MISO-PID (25, 26, 27) que relacionan los vectores de los errores de control (12, 13, 14) con el vector de perfusiones de control (15) . Figura 5.- Muestra un detalle pormenorizado del controlador MISO-PID (25) relacionado con la perfusión del fármaco ePPF (15.1) que presenta como entradas los vectores de los errores de control (12, 13, 14) . El subsistema de control MISO-PID-ePPF (25) está compuesto por tres controladores SISO-PID que relacionan la perfusión del fármaco ePPF con: 1) el vector del error de control relativo al eBIS (12) mediante un controlador PID eBIS-ePPF (25.1) ; 2) el vector del error de control relativo al eNOX (13) mediante un ontrolador PID eNOX-ePPF (25.2) ; y 3) el vector del error de control relativo al eNMB (14) mediante un controlador PID eNMB-ePPF (25.3) . Figura 6.- Muestra un detalle pormenorizado del subsistema de control MISO-PID-eRMF (26) relacionado con la perfusión del fármaco eRMF (15.2) que presenta como entradas los vectores de los errores de control (12, 13, 14) . El subsistema de control MISO-PID-eRMF (26) está compuesto por tres controladores SISO-PID que relacionan la perfusión del fármaco eRMF con: 1) el vector del error de control relativo al eBIS (12) mediante un controlador PID eBIS-eRMF (26.1) ; 2) el vector del error de control relativo al eNOX (13) mediante un controlador PID eNOX-eRMF (26.2) ; y 3) el vector del error de control relativo al eNMB (14) mediante un controlador PID eNMB-ePPF (26.3) . Figura 7.- Muestra un detalle pormenorizado del subsistema de control MISO-PID-eNMB (27) relacionado con la perfusión del fármaco eRCN (15.3) que presenta como entradas los vectores de los errores de control (12, 13, 14) . El subsistema de control MISO-PID-eNMB (27) está compuesto por tres controladores SISO-PID que relacionan la perfusión del fármaco eRCN con: 1) el vector del error de control relativo al eBIS (12) mediante un controlador PID eBIS-eRCN (27.1) ; 2) el vector del error de control relativo al eNOX (13) mediante un controlador PID eNOX-eRCN (27.2) ; y 3) el vector del error de control relativo al eNMB (14) mediante un controlador PID eNMB-eRCN (27.3) . Figura 8.- Muestra un detalle pormenorizado de uno de los 9 controladores SISO-PID (C¡j) que componen el sistema de control SynPID (24) , cada controlador SISO-PID presenta como entradas los correspondientes errores proporcional (k.1) , integral (k.2) y derivativo (k.3) , relativo a cada componente de cada vector de error de control (ey) . Cada controlador SISO-PID se identifica con los subíndices ¡ que identifica el fármaco al que se está calculado la perfusión parcial, y j que identifica la procedencia del monitor. Así ¡'=1 identifica el PPF, ¡=2 el RMF e ¡=3 el RCN, j'=1 identifica el monitor BIS, j=2 el NOX y j'=3 el NMB, k=12 identifica el vector de error relativo al monitor BIS, k=13 el relativo al NOX y k=14 al NMB. DESCRIPCIÓN DETALLADA DE LA INVENCIÓN La presente invención aporta a la técnica varias estrategias de complemento al controlador PID en CL para que sea efectivo en el control en CL de la inducción y mantenimiento de la anestesia general, calculando la dosis de los fármacos ePPF, eRMF eRCN en base a un vector de errores de control. El control en CL es obtenido de forma novedosa por la consideración de la sinergia de los fármacos en el acto anestésico y por la realimentación de la información de monitorización de la DoH, ANG y MRX (otras variables pueden ser consideradas) mediante los monitores eBIS, eNOX y eNMB respectivamente (otros monitores pueden ser considerados) . Los cambios en los valores de los monitores son originados principalmente por el efecto de los fármacos y las actuaciones de la cirugía. Además, las perfusiones de los fármacos están condicionadas por un sistema de seguridad para salvaguardar la integridad física del paciente y están complementadas por un sistema de corrección de perfusiones que el PID clásico no posee. Presenta entre sus novedades la consideración de la sinergia entre los fármacos en un multicontrolador PID, asimetría en los errores de control, corrección de la perfusión por niveles excepcionalmente bajos o altos en los monitores, seguridad ante la sobreperfusión mediante limites fijos o variables de la perfusión de fármacos y mediante suspensión de las bombas, seguridad ante infraperfusión por condicionantes relacionados con la experiencia manual del anestesiólogo (protocolo manual OL) . Finalmente, la decisión final sobre las perfusiones se condiciona con un cuantificador para adecuar las perfusiones a las resoluciones de las bombas electromecánicas de perfusión. El objetivo final es realizar un cálculo automático de las perfusiones de ePPF, eRMF y eRCN que se aplicaría directamente a un paciente bajo cirugía con anestesia general, que sería el usuario final de la presente invención. La invención que se propone tiene entre sus novedades la definición de un nuevo sistema de perfusión de fármacos anestésicos con un sistema de control SynPlD, formado por un banco de filtros, un generador de errores asimétricos de control, un controlador MIMO-PID, un sistema de corrección, un sistema de seguridad y un sistema de cuantificación que pueda aplicarse al paciente bajo cirugía, pues tiene en cuenta: 1) la monitorización de la DoH, ANG y MRX mediante monitores eBIS, eNOX y eNMB; 2) las bombas de perfusión de los fármacos ePPF, eRMF y eRCN; y 3) el uso de un dispositivo electrónico que utilice un microprocesador y una memoria de almacenamiento. Adicionalmente, para estimar las perfusiones automáticas sobre el paciente el sistema de control en CL considera las perfusiones de fármacos previas en el momento de actuación y considera las medidas sobre los monitores actuales y pasadas. El sistema de perfusión continua de fármacos ePPF, eRMF y eRCN con sistema de control SynPlD es un método de control que requiere de la experiencia manual del anestesiólogo (protocolo manual OL) y está personalizado para cada paciente utilizando una variante del método empírico de ajuste de Cohen-Coon a través de las ganancias proporcional, integral y derivativa de cada controlador SISO-PID, del peso del paciente (W) , de su altura (H) , de su sexo (G) y de su masa muscular (MB) . El método de personalización se aplica durante la IPh de la anestesia general. El sistema de control SynPlD (24) propone el vector de perfusión de fármacos anestésicos (5) , como resultado de la aplicación del sistema de conmutación (23) , que inicialmente aplica el vector de perfusiones del protocolo manual (4) en la IPh, para conmutar al vector de perfusiones automáticas (22) en MPh y anular la perfusión en RPh. El sistema de control SynPlD (24) tiene como objetivo principal conducir al paciente (1) a un estado anestésico satisfactorio y fiable en función de: 1) el estado anestésico actual; 2) el vector de variables de monitorización (6) actual y/o pasados (histórico almacenado en la memoria) ; y 3) el vector de perfusión de fármacos anestésicos (5) de instantes pasados (histórico almacenado en la memoria) . La invención consiste en la propuesta de un sistema electrónico en el se ejecute un algoritmo de control realimentado definido por un sistema de control SynPlD (24) basado en un controlador multivariable y con sinergia MIMO-PID (16) que define el sistema de control multivariable para realizar el control de un estado anestésico fiable en pacientes (1) sometidos a cirugía bajo anestesia general. El sistema de control SynPID se implementa en un sistema basado en microprocesador con memoria seleccionado entre: "smartphones", "tablets", ordenadores personales, arduino, raspberr y -PI y un hardware específico para la ejecución del método o emplear el hardware propio de las bombas de perfusión para ejecutar la secuencia de instrucciones que implementarían el método de perfusión de fármacos en un sistema de control SynPID descrito en la presente invención. El sistema de perfusión de fármacos con sinergia mediante control en CL MIMO-PID (SynPID) aplicado en actos anestésicos vía IV de la presente invención difiere de los métodos del estado de la técnica basados en PIDs clásicos en al menos los siguientes aspectos: - El sistema de control SynPID utiliza tres fases de control controladas por el sistema de conmutación (23) : 1) IPh, eta fase correspondiente al inicio del acto nestésico y dura hasta conseguir un estado anestésico satisfactorio, durante este periodo solo el vector de perfusiones del protocolo manual (4) está aplicado al paciente (1) , el final de este periodo se utiliza para la personalización del sistema de control SynPlD (24) al paciente (1) ; 2) MPh, en esta fase es donde ocurre la cirugía y el objetivo del sistema de control SynPlD es mantener el estado anestésico satisfactorio, a pesar de los actos quirúrgicos; y 3) RPh, en esta fase se retiran las perfusiones de los fármacos para conseguir reanimar al paciente. - El sistema de control SynPlD utiliza un banco de filtros (9) para eliminar el ruido y los artefactos del vector de variables de monitorización (6) y obtener el vector de monitorización filtrado. El banco de filtros (9) está basado en una limpieza espectral y en la toma de decisiones en función de unas condiciones de monitorización. - El sistema de control SynPlD utiliza un generador de errores de control (11) relativos a los monitores eBIS, eNOX y eNMB que componen el vector de variables de monitorización (6) , los errores son asimétricos y están definidos por una modulación del vector de objetivos de las variables monitorizadas (8) y el vector de variables filtradas de monitorización (10) . El vector de actuaciones quirúrgicas (7) se reflejan en el paciente (1) a través de variaciones en el vector de variables de monitorización (6) . - El sistema de control SynPlD utiliza un vector de perfusiones de control (15) formado por perfusiones de los fármacos ePPF (15.1) , eRMF (15.2) y eRCN (15.3) . Cada perfusión de fármacos está definida por la acción de un sistema de control MlSO-PlD compuesta por la suma de tres acciones de control relativas a tres controladores SlSO-PlD. - La perfusión de ePPF (15.1) se calcula mediante la suma de: 1) un controlador SlSO-PlD (25.1) que relaciona una parte de la perfusión de control del ePPF con el vector de error de control del monitor eBlS (12) , formado por una componente proporcional (12.1) , una componente integral (12.2) y una componente derivativa (12.3) ; 2) un controlador SlSO-PlD (25.2) que relaciona una parte de la perfusión de control del ePPF con el vector de error de control del monitor eNOX (13) , formado por una componente proporcional (13.1) , una componente integral (13.2) y na componente derivativa (13.3) ; y 3) un controlador SISO-PID (25.3) que relaciona una parte de la perfusión de control del ePPF con el vector de error de control del monitor eNMB (14) , formado por una componente proporcional (14.1) , una componente integral (14.2) y una componente derivativa (14.3) ; - La perfusión de eRMF (15.2) se calcula mediante la suma de: 1) un controlador SISO-PID (26.1) que relaciona una parte de la perfusión de control del eRMF con el vector de error de control del monitor eBIS (12) , formado por una componente proporcional (12.1) , una componente integral (12.2) y una componente derivativa (12.3) ; 2) un controlador SISO-PID (26.2) que relaciona una parte de la perfusión de control del eRMF con el vector de error de control del monitor eNOX (13) , formado por una componente proporcional (13.1) , una componente integral (13.2) y una componente derivativa (13.3) ; y 3) un controlador SISO-PID (26.3) que relaciona una parte de la perfusión de control del eRMF con el vector de error de control del monitor eNMB (14) , formado por una componente proporcional (14.1) , una componente integral (14.2) y una componente derivativa (14.3) ; - La perfusión de eRCN (15.3) se calcula mediante la suma de: 1) un controlador SISO-PID (27.1) que relaciona una parte de la perfusión de control del eRCN con el vector del error de control del monitor eBIS (12) , formado por una componente proporcional (12.1) , una componente integral (12.2) y una componente derivativa (12.3) ; 2) un controlador SISO-PID (27.2) que relaciona una parte de la perfusión de control del eRCN con el vector de error de control del monitor eNOX (13) , formado por una componente proporcional (13.1) , una componente integral (13.2) y una componente derivativa (13.3) ; y 3) un controlador SISO-PID (27.3) que relaciona una parte de la perfusión de control del eRCN con el vector de error de control del monitor eNMB (14) , formado por una componente proporcional (14.1) , una componente integral (14.2) y una componente derivativa (14.3) ; - El sistema de control SynPlD (24) utiliza 9 controladores SISO-PID, agrupados en tres subsistemas de control MISO-PID (figuras 5, 6 y 7) , cada controlador SISO-PID (C¡j ) (figura 8) utiliza para calcular la perfusión del fármaco i (15.i) : - Un sistema de acción proporcional (i.j.1) que define a su salida la acción de perfusión proporcional (15.i.1) , a partir de su entrada que es el error asimétrico proporcional de control (E1) . - Un sistema de acción integral (i.j.2) que define a su salida la acción de perfusión integral (15.i.2) , a partir de su entrada que es el error simétrico integral de control (E2) . - Un sistema de acción derivativa (/'._/'.3) que define a su salida la acción de perfusión derivativa (15.i.3) , a partir de su entrada que es el error asimétrico derivativo de control (E3) . - El sistema de control SynPID (24) utiliza un sistema corrector de perfusiones (17) , que compensa el vector de perfusiones de control (15) con el vector de corrección (18) que están definidas por las desviaciones del vector de variables filtradas de monitorización (10) respecto de unos vectores de umbrales superior e inferior. Estas desviaciones consideradas no han podido ser corregidas por el control multivariable basado en PIDs (24) . - El sistema de control SynPID (24) utiliza un sistema de seguridad (19) , que condiciona el vector de perfusiones de control (15) compensado por el vector de corrección (18) para conducir al vector de control fiable (20) , lo que evita la sobreperfusión e infraperfusión, con ello se consigue evitar periodos de anestesia general profunda que compromete la vida del paciente o periodos de sedación lo que puede ocasionar despertares intraoperatorios. Para evitar la sobreperfusión se aplican las restricciones con el sistema de seguridad (19) para suspender el sistema de bombas de perfusión (2) y para evitar la infraperfusión se aplica el vector de corrección (18) . - El sistema de control SynPID (24) utiliza un sistema cuantificador (21) para que el vector de control fiable (20) sea interpretable por el sistema de bombas de perfusión (2) , que a través de varios catéteres infunden los fármacos vía IV entro del cuerpo del paciente (1) que modificará su estado anestésico y que posteriormente, esas modificaciones serán recogidas por los equipos de monitorización (3) mediante el vector de variables de monitorización (6) . Los pasos para la multi-perfusión de fármacos anestésicos con sinergia mediante control en CL MIMO-PID (SynPlD) aplicado en actos anestésicos vía IV para la perfusión automática, ejecutables en un dispositivo electrónico, son los siguientes para cada momento de actuación: Paso 1: Medir el valor del vector de los monitores eBIS (6.1) , eNOX (6.2) y eNMB (6.3) que depende principalmente del vector de perfusión de los fármacos anestésicos ePPF (5.1) , eRMF (5.2) y eRCN (5.3) . Los fármacos anestésicos se administran al paciente (1) mediante un sistema de bombas de perfusión (2) . Los equipos de monitorización (3) recogen sobre el paciente los efectos de los fármacos anestésicos y del vector de actuaciones quirúrgicas (7) del médico cirujano en una intervención a través del vector de variables de monitorización (6) ; también otros factores pueden influir en el valor del vector de monitorización; la información del vector de variables de monitorización (6) y la decisión tomada sobre el valor del vector de perfusión de fármacos anestésicos (5) se almacena en una memoria; Paso 2: Calcular el vector de perfusión de los fármacos anestésicos ePPF (5.1) , eRMF (5.2) y eRCN (5.3) mediante un sistema de control SynPlD (24) a partir de la realimentación del valor del vector de los monitores eBIS (6.1) , eNOX (6.2) y eNMB (6.3) , del vector de perfusiones del protocolo manual relativas al ePPF (4.1) , al eRMF (4.2) y al eRCN (4.3) y del vector de los valores objetivo de variables monitorizadas relativas al eBIS (8.1) , al eNOX (8.2) y al eNMB (8.3) ; Paso 3: Proceder a la limpieza de ruido y artefactos del vector de los monitores eBIS (6.1) , eNOX (6.2) y eNMB (6.3) , mediante un sistema de limpieza y filtrado para el eBIS (9.1) , un sistema de limpieza y filtrado para el eNOX (9.2) y un sistema de limpieza y filtrado para el eNMB (9.3) , para obtener un vector de variables de monitorización filtrada del eBIS (10.1) , eNOX (10.2) y eNMB (10.3) ; Paso4: Calcular unos vectores de errores de control de los monitores al eBIS (12) , eNOX (13) y al eNMB (14) . El vector de error de control eBIS tiene tres omponentes un error asimétrico proporcional eBIS (12.1) , un error simétrico integral eBIS (12.2) y un error asimétrico derivativo eBIS (12.3) . El vector de error de control eNOX tiene tres componentes un error asimétrico proporcional eNOX (13.1) , un error simétrico integral eNOX (13.2) y un error asimétrico derivativo eNOX (13.3) . El vector de error de control eNMB tiene tres componentes un error asimétrico proporcional eNMB (14.1) , un error simétrico integral eNMB (14.2) y un error asimétrico derivativo eNMB (14.3) . Los vectores de los errores de control (12, 13, 14) se obtienen mediante un generador de errores de control (11) compuesto por un generador de error de la DoH (28) , un generador de error de la ANG (29) y un generador de error de la MRX (30) . El generador de error de la DoH (28) obtiene las tres componentes de error asimétrico proporcional eBIS (12.1) , simétrico integral eBIS (12.2) y asimétrico derivativo eBIS (12.3) a partir de la variable de monitorización filtrada del eBIS (10.1) y del valor objetivo del eBIS (8.1) . El generador de error de la ANG (29) obtiene las tres componentes de error asimétrico proporcional eNOX (13.1) , simétrico integral eNOX (13.2) y asimétrico derivativo eNOX (13.3) a partir de la variable de monitorización filtrada del eNOX (10.2) y del valor objetivo del eNOX (8.2) . El generador de error de la MRX (30) obtiene las tres componentes de error asimétrico proporcional eNMB (14.1) , simétrico integral eNMB (14.2) y asimétrico derivativo eNMB (14.3) a partir de la variable de monitorización filtrada del eNMB (10.3) y del valor objetivo del eNMB (8.3) . Los errores indicarán en el momento de su evaluación la desviación del vector de variables de monitorización (6) respecto del vector de objetivos de las variables monitorizadas (8) . Paso 5: Calcular un vector de perfusiones de control de fármacos de ePPF (15.1) , de eRMF (15.2) y de eRCN (15.3) mediante un controlador multivariable y con sinergia MIMO-PID (16) que presenta como entradas los vectores de errores de control (12, 13, 14) y el vector de perfusiones del protocolo manual (4) . El controlador multivariable y con sinergia MIMO-PID (16) está formado por tres subsistemas de control MISO-PID (25, 26, 27) , que a su vez cada uno está formado por tres controladores SISO-PID: 1) para obtener la perfusión de control del ePPF (15.1) se usan los controladores SISO-PID (25.1, 25.2, 25.3) ; 2) para obtener la perfusión de control del eRMF (15.2) se usan los controladores SISO-PID (26.1, 26.2, 26.3) ; y 3) para obtener la perfusión de control del eRCN (15.3) se usan los controladores SISO-PID (27.1, 27.2, 27.3) . Paso6: Calcular un vector de corrección (18) formado por la perfusión correctora de ePPF (18.1) , la perfusión correctora de eRMF (18.2) y la perfusión correctora de eRCN (18.3) mediante un sistema corrector de perfusiones (17) que está formado por un subsistema de corrección de la perfusión del ePPF (17.1) , un subsistema de corrección de la perfusión del eRMF (17.2) y un subsistema de corrección de la perfusión del eRCN (17.3) a partir del vector de variables filtradas de monitorización (10) compuesto por la monitorización filtrada del eBIS (10.1) , la monitorización filtrada del eNOX (10.2) y la monitorización filtrada del eNMB (10.3) ; el vector de corrección (18) trata de compensar el vector de perfusiones de control (15) con el fin de evitar la infraperfusión para mitigar el efecto de la disminución de la DoH, ANG y MRX; el vector de corrección (18) se calcula en base a un vector de umbrales superior e inferior sobre el vector de variables filtradas de monitorización (10) ; Paso 7: Calcular un vector de control fiable (20) formado por la perfusión fiable de ePPF (20.1) , la perfusión fiable de eRMF (20.2) y la perfusión fiable de eRCN (20.3) mediante un sistema de seguridad (19) que está formado por un subsistema de seguridad de la perfusión del ePPF (19.1) , un subsistema de seguridad de la perfusión del eRMF (19.2) y un subsistema de seguridad de la perfusión del eRCN (19.3) a partir del vector de perfusiones de control (15) formado por la perfusión de control del ePPF (15.1) , la perfusión de control del eRMF (15.2) y la perfusión de control del eRCN (15.3) y a partir del vector de corrección (18) formado por la perfusión correctora de ePPF (18.1) , la perfusión correctora de eRMF (18.2) y la perfusión correctora de eRCN (18.3) ; el sistema de seguridad (19) trata de compensar el vector de perfusiones de control (15) para conducir al vector de control fiable (20) a un valor fiable para el paciente (1) y fiable para causar el efecto deseado en el paciente (1) , lo que evita la sobreperfusión e infraperfusión, con ello se consigue evitar periodos de anestesia general profunda que compromete la vida del paciente o periodos de sedación lo que puede ocasionar despertares intraoperatorios; para evitar la sobreperfusión se aplican unos vectores de restricción de suspensión del sistema de bombas de perfusión (2) y para evitar la infraperfusión se aplica el vector de corrección (18) ; Paso 8: Calcular un vector de perfusiones automáticas (22) formado por la perfusión automática de ePPF (22.1) , la perfusión automática de eRMF (22.2) y la perfusión automática de eRCN (22.3) mediante un sistema cuantificador (21) que está formado por un subsistema de cuantificación de la perfusión del ePPF (21.1) , un subsistema de cuantificación de la perfusión del eRMF (21.2) y un subsistema de cuantificación de la perfusión del eRCN (21.3) a partir de un vector de control fiable (20) formado por la perfusión fiable de ePPF (20.1) , la perfusión fiable de eRMF (20.2) y la perfusión fiable de eRCN (20.3) ; el sistema cuantificador (21) modifica las perfusiones para que el vector de control fiable (20) sean interpretable por el sistema de bombas de perfusión (2) , compuesto por la bomba de ePPF (2.1) , la bomba de eRMF (2.2) y la bomba de eRCN (2.3) , que a través de varios catéteres infunden los fármacos vía IV dentro del cuerpo del paciente (1) ; Paso9: Definir el vector de perfusión de fármacos anestésicos (5) compuesto por la perfusión de ePPF (5.1) , la perfusión de eRMF (5.2) y la perfusión de eRCN (5.3) mediante un sistema de conmutación (23) para controlar el tiempo transcurrido en la IPh, el tiempo en la MPh y el tiempo en la RPh; en la IPh el vector de perfusión de fármacos anestésicos (5) es el mismo que el vector de perfusiones del protocolo manual (4) ; en la MPh el vector de perfusión de fármacos anestésicos (5) es el mismo que el vector de perfusiones automáticas (22) ; y en la RPh se activa la suspensión del sistema de bombas de perfusión (2) ; Paso 10: Calcular la perfusión de control del fármaco ePPF (15.1) a partir del subsistema de control MISO-PID-ePPF Ci (25) , que a su vez está formado por tres controladores SISO-PID (C11, C12, C13) (25.1, 25.2, 25.3) , cada controlador SISO-PID está formado a su vez por tres acciones de control de fármacos que se detallan a continuación: 1) el controlador SISO-PID C11 (25.1) que calcula la contribución a la perfusión de la perfusión de fármaco ePPF (15.1.1) aportada por el vector de error de control del monitor eBIS (12) , está formado por una acción proporcional que relaciona la perfusión parcial de ePPF (15.1.1.1) con el error asimétrico de control proporcional relativo al eBIS (12.1) , por una acción integral que relaciona la perfusión parcial de ePPF (15.1.1.2) con el error simétrico de control integral relativo al eBIS (12.2) y por una acción derivativa que relacional la perfusión parcial de ePPF (15.1.1.3) con el error asimétrico erivativo relativo al eBIS (12.3) ; 2) el controlador SISO-PID C12 (25.2) que calcula la contribución a la perfusión de control de la perfusión de fármaco ePPF (15.1.2) aportada por el vector de error de control del monitor eNOX (13) , está formado por una acción proporcional que relaciona la perfusión parcial de ePPF (15.1.2.1) con el error asimétrico de control proporcional relativo al eNOX (13.1) , por una acción integral que relaciona la perfusión parcial de ePPF (15.1.2.2) con el error simétrico de control integral relativo al eNOX (13.2) y por una acción derivativa que relaciona la perfusión parcial de ePPF (15.1.2.3) con el error asimétrico derivativo relativo al eNOX (13.3) ; 3) el controlador SISO-PID C13 (25.3) que calcula la contribución a la perfusión de control de la perfusión de fármaco ePPF (15.1.3) aportada por el vector de error de control del monitor eNMB (14) , está formado por una acción proporcional que relaciona la perfusión parcial de ePPF (15.1.3.1) con el error asimétrico de control proporcional relativo al eNMB (14.1) , por una acción integral que relaciona la perfusión parcial de ePPF (15.1.3.2) con el error simétrico de control integral relativo al eNMB (14.2) y por una acción derivativa que relaciona la perfusión parcial de ePPF (15.1.3.3) con el error asimétrico derivativo relativo al eNMB (14.3) ; Paso11: Calcular la perfusión de control del fármaco eRMF (15.2) a partir del subsistema de control MISO-PID-eRMF C2 (26) , que a su vez está formado por tres controladores SISO-PID (C21, C22, C23) (26.1, 26.2, 26.3) , cada controlador SISO-PID está formado a su vez por tres acciones de control de fármacos que se detallan a continuación: 1) el controlador SISO-PID C21 (26.1) que calcula la contribución a la perfusión de control de la perfusión de fármaco eRMF (15.2.1) aportada por el vector de error de control del monitor eBIS (12) , está formado por una acción proporcional que relaciona la perfusión parcial de ePPF (15.2.1.1) con el error asimétrico de control proporcional relativo al eBIS (12.1) , por una acción integral que relaciona la perfusión parcial de eRMF (15.2.1.2) con el error simétrico de control integral relativo al eBIS (12.2) y por una acción derivativa que relacional la perfusión parcial de eRMF (15.2.1.3) con el error asimétrico derivativo relativo al eBIS (12.3) ; 2) el controlador SISO-PID C22 (26.2) que calcula la contribución a la perfusión de control de la perfusión de fármaco eRMF (15.2.2) aportada por el vector de error de control del monitor eNOX (13) , está formado por una acción proporcional que relaciona la perfusión parcial de eRMF (15.2.2.1) con el error asimétrico de control roporcional relativo al eNOX (13.1) , por una acción integral que relaciona la perfusión parcial de eRMF (15.2.2.2) con el error simétrico de control integral relativo al eNOX (13.2) y por una acción derivativa que relaciona la perfusión parcial de eRMF (15.2.2.3) con el error asimétrico derivativo relativo al eNOX (13.3) ; 3) el controlador SISO-PID C23 (26.3) que calcula la contribución a la perfusión de control de la perfusión de fármaco eRMF (15.2.3) aportada por el vector de error de control del monitor eNMB (14) , está formado por una acción proporcional que relaciona la perfusión parcial de eRMF (15.2.3.1) con el error asimétrico de control proporcional relativo al eNMB (14.1) , por una acción integral que relaciona la perfusión parcial de eRMF (15.2.3.2) con el error simétrico de control integral relativo al eNMB (14.2) y por una acción derivativa que relaciona la perfusión parcial de eRMF (15.2.3.3) con el error asimétrico derivativo relativo al eNMB (14.3) ; Paso12: Calcular la perfusión de control del fármaco eRCN (15.3) a partir del subsistema de control MISO-PID-eNMB C3 (27) , que a su vez está formado por tres controladores SISO-PID (C31, C32, C33) (27.1, 27.2, 27.3) , cada controlador SISO-PID está formado a su vez por tres acciones de control de fármacos que se detallan a continuación: 1) el controlador SISO-PID C31 (27.1) que calcula la contribución a la perfusión de control de la perfusión de fármaco eRCN (15.3.1) aportada por el vector de error de control relativo al eBIS (12) , está formado por una acción proporcional que relaciona la perfusión parcial de eRCN (15.3.1.1) con el error asimétrico de control proporcional relativo al eBIS (12.1) , por una acción integral que relaciona la perfusión parcial de eRCN (15.3.1.2) con el error simétrico de control integral relativo al eBIS (12.2) y por una acción derivativa que relaciona la perfusión parcial de eRCN (15.3.1.3) con el error asimétrico derivativo relativo al eBIS (12.3) ; 2) el controlador SISO-PID C32 (27.2) que calcula la contribución a la perfusión de control de la perfusión de fármaco eRCN (15.3.2) aportada por el vector de error de control del m onitor eNOX (13) , está formado por una acción proporcional que relaciona la perfusión parcial de eRCN (15.3.2.1) con el error asimétrico de control proporcional relativo al eNOX (13.1) , por una acción integral que relaciona la perfusión parcial de eRCN (15.3.2.2) con el error simétrico de control integral relativo al eNOX (13.2) y por una acción derivativa que relaciona la perfusión parcial de eRCN (15.3.2.3) con el error asimétrico derivativo relativo al eNOX (13.3) ; 3) el controlador SISO-PID C33 (27.3) que calcula la contribución a la erfusión de control de la perfusión de fármaco eRCN (15.3.3) aportada por el vector de error de control relativo al eNMB (14) , está formado por una acción proporcional que relaciona la perfusión parcial de eRMF (15.3.3.1) con el error asimétrico de control proporcional relativo al eNMB (14.1) , por una acción integral que relaciona la perfusión parcial de eRCN (15.3.3.2) con el error simétrico de control integral relativo al eNMB (14.2) y por una acción derivativa que relaciona la perfusión parcial de eRCN (15.3.3.3) con el error asimétrico derivativo relativo al eNMB (14.3) ; A continuación, se expresan las ecuaciones que definen el sistema de control SynPlD que, haciendo uso del vector de perfusiones del protocolo manual (4) , del vector de variables de monitorización (6) , del vector de objetivos de las variables monitorizadas (8) , de los vectores de los errores de control (12, 13, 14) , del vector de corrección (18) y del vector de control fiable (20) , obtiene un vector de perfusión de fármacos anestésicos (5) que mantendrá al paciente (1) en un estado anestésico satisfactorio a pesar de la cirugía. Los fármacos considerados son ePPF, eRMF y eRCN y los monitores considerados son eBIS, eNOX y eNMB, por lo que el orden de los vectores se fija en 3x1 y el orden de las matrices en 3x3, en este ejemplo de realización de la invención. Resaltar que la presente invención no hace uso de modelos fármacocinéticos o fármacodinamicos para su diseño ni para la personalización a cada paciente (1) . Antes de detallar el método y en aras de clarificar las variables que aparecen en las ecuaciones, se relacionan a continuación las más importantes agrupadas por sus unidades físicas y características comunes: 1) Las dimensiones del sistema multivariable son de 3x3, relativo al vector de variables de monitorización (6) r=3, donde 1 hace referencia al eBIS, 2 hace referencia al eNOX y 3 hace referencia al eNMB; y relativo al vector de perfusión de fármacos anestésicos (5) s=3, donde 1 hace referencia al ePPF, 2 hace referencia al eRMF y 3 hace referencia al eRCN; 2) El tiempo discretizado se representa con el número entero k, de tal forma que un tiempo real t, se puede mostrar como: t=k-Ts; donde Ts es el periodo de perfusión; el tiempo de inicio de la IPh es t, el tiempo de inicio de la MPh es tm y el inicio del tiempo de la RPh es tr; 3) Vectores que hacen referencia a las perfusiones de fármacos, unidades de perfusión por peso del paciente [pg/ (min-kg) j, ecuación general: U X = [«x1 Mx2 Mx3 T Donde ux hace referencia al vector columna de perfusiones con dimensión (3x1) ; ux1 es la perfusión del ePPF; ux2 es la perfusión del eRMF; ux3 es la perfusión del eRCN; T indica la transposición del vector. El listado de variables de perfusión es el siguiente: x Ref. Vector de perfusiones Símbolo Ecuac. x: hace referencia al subíndice del vector considerado; Ref. indica el número que aparece en las figuras; Símbolo: Identifica la variable por su nombre; Ecuac. indica la ecuación de la descripción general donde ha sido definida. ) Vectores que hacen referencia a las variables de monitorización, unidades de monitorización (UM) y el rango de variación es de 0 a 100; ecuación general: y z = [y 2 i yz2 yz3 ]T, Donde yz hace referencia al vector columna variables de monitorización (3x1) ; yz1 es la monitorización del eBIS; yz2 es la monitorización del eNOX; yz3 es la monitorización del eNMB; T indica la transposición del vector. El listado de variables de monitorización y sus variantes es el siguiente: z Ref. Descripción del vector de Símbolo Ecuac. 6 variables de monitorización medidas y [2. 1] T 8 valores objetivo de las variables monit yT [2. 6] f 10 variables de monitorización filtradas yf [3. 1] HI umbrales superiores de activación de yHI [6. 3] LO umbrales inferiores de activación de l yLO [6. 4] z: hace referencia al subíndice del vector considerado; Ref. indica el número que aparece en las figuras; Símbolo: Identifica la variable por su nombre; Ecuac. indica la ecuación de la descripción general donde ha sido definida. ) Vectores que hacen referencia a los vectores de los errores de control (12, 13, 14) , con rango de variación ±200 UM; ecuación general: e j = \_e P j e i j e F j \ ' Donde ej hace referencia al vector columna de errores de control (3x1) ; e1 es el vector de error de control relativo al eBIS; e2 es el vector de error de control relativo al eNOX; e3 es el vector de error de control relativo al eNMB; eP¡ es el vector de error asimétrico de control proporcional relativo al monitor¡; e¡ es el vector de error simétrico de control integral relativo al monitor ¡; y eF¡ es el vector de error asimétrico y filtrado de control derivativo relativo al monitor¡; T indica la transposición del vector. El listado de variables de error y sus variantes es el siguiente: j Ref. Descripción del error de control Símbolo Ecuac. j: hace referencia al subíndice del vector considerado; Ref. indica el número que aparece en las figuras; Símbolo: Identifica la variable por su nombre; Ecuac. indica la ecuación de la descripción general donde ha sido definida. ) Variables que hacen referencia al controlador multivariable y con sinergia MIMO-PID (16) ; a los subsistemas de control MISO-PID (25, 26, 27) y a los controladores SISO-PID. Donde [PID] es la matriz de controladores PID que componen el controlador multivariable y con sinergia MIMO-PID (16) ; C-i es el vector de controladores PID que componen el subsistema de control MISO-PID-ePPF (25) ; C2 es el vector de controladores PID que componen el subsistema de control MISO-PID-eRMF (26) ; C3 es el vector de controladores PID que componen el subsistema de control MISO-PID-eNMB (27) ; Cj es el controlador SISO-PID que relaciona el error asociado al monitor i con el fármaco j. b j Ref. Descripción del controlador PID Símbolo Ecuac. ica el número que aparece en las figuras; Símbolo: Identifica la variable por su nombre; Ecuac. indica la ecuación de la descripción general donde ha sido definida. El sistema de la presente invención se actualiza cada Ts segundos, tiempo asociado al periodo de muestreo. El sistema se inicia en el tiempo t¡ con la IPh. A partir del instante de conmutación para pasar de la IPh a la MPh (tm) los valores son actualizados cada periodo de ejecución del método (Ts) según las ecuaciones 2 a 13, según se detalla a continuación: Ecuación 2: M e d i r e l v e c t o r d e v a r i a b l e s d e m o n i t o r i z a c i ó n ( 6 ) ; d e f i n i r y c a l c u l a r e l v e c t o r d e p e r f u s i o n e s d e l p r o t o c o l o m a n u a l ( 4 ) ; y f i j a r e l v e c t o r d e o b je t i v o s d e l a s v a r i a b l e s m o n i t o r i z a d a s ( 8 ) . E s t o s s o n l o s r e s u l t a d o s o b t e n i d o s e n e l p a s o 2. . R e f . i n d i c a e l n ú m e r o q u e a p a r e c e e n l a s f i g u r a s ; E c u a c . i n d i c a la e c u a c i ó n d e la d e s c r i p c i ó n g e n e r a l d o n d e h a s i d o d e f i n i d a, p a r t i c u l a r i z a d a p a r a s = r = 3 . Ecuación 3: C a l c u l a r e l v e c t o r d e v a r i a b l e s f i l t r a d a s d e m o n i t o r i z a c i ó n ( 1 0 ) , d e f i n i r u n b a n c o d e f i l t r o s ( 9 ) , b a s a d o s e n f i l t r o s p a s o b a jo d e o r d e n 1 ; y d e f i n i r u n v e c t o r d e f r e c u e n c i a s d e c o r t e . E l r e s u l t a d o d e l p a s o 3 e s e l v e c t o r d e v a r i a b l e s f i l t r a d a s d e R e f . i n d i c a e l n ú m e r o q u e a p a r e c e e n l a s f i g u r a s ; E c u a c . i n d i c a la e c u a c i ó n d e la d e s c r i p c i ó n g e n e r a l d o n d e h a s i d o d e f i n i d a, p a r t i c u l a r i z a d a p a r a s = r = 3 . Ecuación 4: C a l c u l a r e l v e c t o r d e e r r o r d e c o n t r o l d e l m o n i t o r e B I S e i ( 1 2 ) c o n e l g e n e r a d o r d e e r r o r d e la D o H ( 2 8 ) , e l v e c t o r d e e r r o r d e c o n t r o l d e l m o n i t o r e N O X e2 ( 1 3 ) c o n e l g e n e r a d o r d e e r r o r d e la A N G ( 29 ) , y e l v e c t o r d e e r r o r d e c o n t r o l d e l m o n i t o r e N M B e3 ( 1 4 ) c o n e l g e n e r a d o r d e e r r o r d e la R M X ( 3 0 ) , c a d a u n o c o n s u s c o m p o n e n t e s p r o p o r c i o n a l, i n t e g r a l y d e r i v a t i v a ( 12 .1, 12 .2, 12 .3 ) , ( 13 .1, 13.2, 13 .3 ) y ( 14 .1, 14.2, 14.3 ) ; c a l c u l a r lo s e r r o r e s a s i m é t r i c o p r o p o r c i o n a l ( 12 .1, 13 .1, 14 .1 ) , s i m é t r i c o i n t e g r a l ( 12 .2, . L o s v e c t o r d e o b j e t i v o s d e l a s v a r i a b l e s m o n i t o r i z a d a s ( 8 ) e s t á p o n d e r a d o p o r u n a m a t r i z d e c o e f i c i e n t e s [B] e n la a c c i ó n p r o p o r c i o n a l y u n a m a t r i z d e c o e f i c i e n t e s [G] e n la a c c i ó n d e r i v a t i v a, s i e n d o u n i t a r i o e l v a l o r d e p o n d e r a c i ó n d e la a c c i ó n i n t e g r a l . E l s i s t e m a d e c o n t r o l S y n P l D d e la p r e s e n t e i n v e n c i ó n s e d e f i n e n t a n t o [B] c o m o [G] d e p e n d i e n t e s d e l v e c t o r d e v a r i a b l e s d e m o n i t o r i z a c i ó n ( 6 ) y d e l v e c t o r d e o b je t i v o s d e l a s v a r i a b l e s m o n i t o r i z a d a s ( 8 ) . L o s r e s u l t a d o s d e l p a s o 4 s o n l o s v e c t o r e s d e l o s e r r o r e s d e c o n t r o l Ref. Definición matemática Ecuac. Ref. indica el número que aparece en las figuras; Ecuac. indica la ecuación de la descripción general donde ha sido definida, particularizada para s=r=3. Ecuación 5: Calcular el vector de perfusiones de control (15) mediante un controlador multivariable y con sinergia MIMO-PID (16) , los vectores de los errores de control del monitor eBIS (12) , eNOX (13) y eNMB (14) y el vector de perfusiones del protocolo manual (4) ; definir la matriz [PID] de controladores SISO-PID que componen el controlador multivariable y con sinergia MIMO-PID (16) ; definir los controladores SISO-PID C¡j relativos al monitor j y al fármaco /; definir las acciones de control proporcional, integral y derivativa de los controladores SISO-PID cuya suma define la acción de control total de cada controlador SISO-PID; definir las matrices de ganancias relativas a los controladores SISO-PID; definir la matriz de sinergia de fármacos; definir el vector Ko de ganancias sobre el vector de perfusiones del protocolo manual (4) ; definir los subsistemas de control MISO-PID (25, 26, 27) . El resultado del Paso 5 es el vector de perfusiones de control (15) . Ref. Definición matemática Ecuac. 15 Upid = [M1 U 2 U3 ] [5. 1] Ref. Definición matemática Ecuac. Ref. indica el número que aparece en las figuras; Ecuac. indica la ecuación de la descripción general donde ha sido definida, particularizada para s=r=3. Ecuación 6: Definir y calcular unas perfusiones correctoras de fármacos (18) a partir del vector de variables filtradas de monitorización (10) ; definir los vectores de umbrales superiores e inferiores de activación de la corrección. El resultado del paso 6 es el vector de corrección (18) . Ref. Definición matemática Ecuac. Ref. Definición matemática Ecuac. Ref. indica el número que aparece en las figuras; Ecuac. indica la ecuación de la descripción general donde ha sido definida, particularizada para s=r=3. Ecuación 7: Definir y calcular el vector de control fiable (20) , para evitar la hiper/infra dosificación de fármacos, a partir del vector de perfusiones de control (15) y del vector de corrección (18) ; definir los vectores de limites superiores e inferiores de la perfusión de fármacos atendiendo a dos conceptos: 1 ) sólo se puede aplicar perfusiones positivas al paciente (1 ) , por tanto, el sistema de bombas de perfusión (2 ) queda suspendido (perfusión nula) cuando el vector de perfusiones de control (15) más el vector de corrección (18) da como resultado perfusiones negativas o nulas; y 2 ) los límites máximos de las perfusiones deben de evitar las sobredosis de fármacos para evitar los niveles de toxicidad. El resultado del paso 7 es el vector de control fiable (20) . Ref. Definición matemática Ecuac. Ref. Definición matemática Ecuac. Ref. indica el número que aparece en las figuras; Ecuac. indica la ecuación de la descripción general donde ha sido definida, particularizada para s=r=3. Ecuación 8: Definir y calcular el vector de perfusiones automáticas (22) a partir del vector de control fiable (20 ) ; definir el vector de resoluciones de cada bomba de perfusión de fármacos; el vector de control fiable (20 ) se acomoda a la resolución del sistema de bombas de perfusión continua (2 ) para obtener así el vector de perfusiones automáticas (22) que se dispensan al paciente (1) . El resultado del paso 8 es el vector de perfusiones automáticas (2 2 ) . Ref. Definición matemática Ecuac. Ref. indica el número que aparece en las figuras; Ecuac. indica la ecuación de la descripción general donde ha sido definida, particularizada para s=r=3. Ecuación 9: Definir y calcular el vector de perfusión de fármacos anestésicos (5) a partir del vector de perfusiones del protocolo manual (4) y el vector de perfusiones automáticas (22) a partir de un sistema de conmutación (23) . El resultado del paso 9 es el vector de perfusiones de fármacos anestésicos (5) . Ref. Definición matemática Ecuac. Ref. indica el número que aparece en las figuras; Ecuac. indica la ecuación de la descripción general donde ha sido definida, particularizada para s=r=3. Ecuación 10: Definir el subsistema de control MISO-PID-ePPF (25) como un conjunto de controladores SISO-PID; calcular la perfusión de control del ePPF (15.1) ; a partir de los controladores SISO-PID (25.1, 25, .2, 25.3) , de los vectores de los errores de control (12, 13, 14) y de la perfusión de ePPF del protocolo manual (4.1) . El resultado del paso 10 es la perfusión de control del ePPF (15.1) . Ref. Definición matemática Ecuac. U * oii muoli 15.1 1 ~ C 1 ^ i + [10.2] U1 ~ Cn *^n + C12 '^12 + C13 '^13 + * 011 Uol1 Ref. indica el número que aparece en las figuras; Ecuac. indica la ecuación de la descripción general donde ha sido definida, particularizada para s=r=3. Ecuación 11: Definir el subsistema de control MISO-PID-eRMF (26) como un conjunto de controladores SISO-PID; calcular la perfusión de control del eRMF (15.2) ; a partir de los controladores SISO-PID (26.1, 26, .2, 26.3) , de los vectores de los errores de control (12, 13, 14) y de la perfusión de ePPF del protocolo manual (4.2) . El resultado del paso 11 es la perfusión de control del eRMF (15.2) . Ref. Definición matemática Ecuac. Ref. Definición matemática Ecuac. Ref. indica el número que aparece en las figuras; Ecuac. indica la ecuación de la descripción general donde ha sido definida, particularizada para s=r=3. Ecuación 12: Definir el subsistema de control MISO-PID-eNMB (27) como un conjunto de controladores SISO-PID; calcular la perfusión de control del eRCN (15.3) ; a partir de los controladores SISO-PID (27.1, 27, .2, 27.3) , de los vectores de los errores de control (12, 13, 14) y de la perfusión de eRCN del protocolo manual (4.3) . El resultado del paso 11 es la perfusión de control del eRCN (15.3) . Ref. Definición matemática Ecuac. U3 C 3 -S, + Kol3 'Ug¡3 15.3 [12.2] U3 C3l'$31 + C32 '^ 32 + C33 '$33 + Kol3 'Uol3 Ref. indica el número que aparece en las figuras; Ecuac. indica la ecuación de la descripción general donde ha sido definida, particularizada para s=r=3. Ecuación 13: Se formula para la reivindicación de nuevos fármacos y monitores. Ref. Definición matemática Ecuac. Ref. indica el número que aparece en las figuras; Ecuac. indica la ecuación de la descripción general donde ha sido definida, particularizada para s=r=3. Ecuación 14: Ajuste de los parámetros del sistema de control SynPID a cada paciente para absorber la variabilidad inter/intrapaciente. El ajuste involucra al paso 3 y al paso 5 de la invención. En el paso 3 se han de ajustar las frecuencias de corte de los filtros xpresadas en las ecuaciones [3. 5] y [3. 6]. En el paso 5 se han de ajustar las matrices de ganancias del controlador multivariable y con sinergia MIMO-PID (16) expresadas en las ecuaciones [5. 16], [5. 17] y [5. 18]. La información necesaria para el ajuste se extrae en la IPh donde al paciente (1) se le somete únicamente al vector de perfusiones del protocolo manual (4) . Por tanto, desde t¡ hasta tm se almacenan en una memoria las ejecuciones del método y justo en el tiempo tm se aplica una variante del método de Cohen-Coon de ajuste empírico de PIDs y en ese instante el sistema de conmutación (23) el vector de perfusión de fármacos anestésicos (5) es el resultado del sistema de control SynPlD (24) según el vector de perfusiones automáticas (22) . Las ganancias relativas a la matriz de ganancias proporcional [5. 19] está relacionada con el peso del paciente y el vector de perfusiones del protocolo manual (4) están relacionadas con el peso, altura, género y masa muscular del paciente. La ecuación 14 involucra a todos los pasos definidos para la invención propuesta, pero de forma directa involucra especialmente a los pasos 3, 5 y 6. Una vez calculadas las ganancias en el tiempo tm, estas permanecerán constantes hasta el tiempo de recuperación tr. Los sistemas que necesitan ajuste son: - Banco de filtros (9) : es necesario ajustar los tres parámetros que hacen referencia a la frecuencia de corte. - Controlador multivariable y con sinergia MIMO-PID (16) : es necesario ajustar 18 parámetros, por cada controlador SISO-PID hay que ajusta una ganancia proporcional, una integral y una derivativa. - Sistema corrector de perfusiones (17) : que utiliza las ganancias proporcionales del controlador multivariable y con sinergia MIMO-PID (16) . Ref. Definición matemática Ecuac. Ref. indica el número que aparece en las figuras; Ecuac. indica la ecuación de la descripción general donde ha sido definida, particularizada para s=r=3. "x " identifica el producto elemento a elemento (producto Schur) . Donde K es una ganancia universal [ (¡ig/ (min) ) /UM]; [KP] es la matriz de ganancias proporcionales [ (pg/ (min-kg) ) /UM]; [K |] es la matriz de ganancias integrales [ (pg/ (min-kg) ) / (UM-min) ]; [T|] es la matriz de tiempos de acción integral [min]; [KD] es la matriz de ganancias derivativas [ (pg/kg) /UM]; [TD] es la matriz de tiempos de acción derivativo [min]. Ecuación 15: Ajuste de otros parámetros del sistema de control SynPÍD que son universales y comunes a todos los pacientes (común a la variabilidad inter/intrapaciente) . Estos parámetros son en general constantes, pero pueden ser ajustados de forma explícita y generalizada por sexo, grupos de población (diabéticos, obesos...) , tipos de irugía, por territorios y/o edades. A continuación, se relacionan los parámetros considerados y las ecuaciones en las que aparecen: Parámetro Tipo Definición Ecuac. Parámetro Tipo Definición Ecuac. APLICACIÓN INDUSTRIAL Respecto de la implementación del sistema de multi-perfusión de fármacos con sinergia mediante control en CL MIMO-PID (SynPlD) aplicado en actos anestésicos vía IV de la presente invención, una de las realizaciones contempla su ejecución en código interpretable por dispositivos Android, IOS, Arduino, Raspberr y -PI, ordenador personal, bombas de perfusión comerciales o hardware específico. El sistema de control SynPID se ejecuta de forma iterativa cada Ts segundos y consta de las siguientes fases: 1) Puesta en servicio en t¡ donde existen N¡ iteraciones del método; 2) IPh, desde t¡ hasta tm, donde existen Nm-N¡ iteraciones del método; 3) MPh, desde tm hasta tr; y 4) RPh, a partir de tr, donde existen Nr-Nm iteraciones del método. El resultado de cada iteración es obtener el vector de perfusión de fármacos anestésicos (5) que se ha de administrar al paciente (1) con el sistema de bombas de perfusión (2) para que el vector de variables de monitorización (6) sea conducido al vector de objetivos de las variables monitorizadas (8) a pesar del vector de actuaciones quirúrgicas (7) . Las acciones a tomar en cada una de las fases de aplicación del método SynPID implementado en cualquiera de los dispositivos antes indicados son: 1) Antes de la puesta en servicio se deben de obtener los siguientes datos: 1) del paciente (1) el peso, edad, sexo, altura y masa muscular para ajustar vector de perfusiones del protocolo manual (4) del que derivarán los valores de los vectores de las ecuaciones [2.4] y [2.5]; 2) del sistema de bombas de perfusión (2) su resolución para ajustar el vector de la ecuación [8. 3]; 3) del sistema S y n P l D ( 24 ) s u p e r i o d o d e e j e c u c i ó n m o s t r a d o e n la e c u a c i ó n [ 2. 4 ] ; la m a t r i z d e s i n e r g i a d e f á r m a c o s m o s t r a d a e n la e c u a c i ó n [ 5. 10 ] ; l a s m a t r i c e s d e a s i m e t r í a d e l o s e r r o r e s d e c o n t r o l m o s t r a d o s e n l a s e c u a c i o n e s [ 4. 3 ] y [ 4. 5 ] y e n g e n e r a l d e t o d o s l o s p a r á m e t r o s m o s t r a d o s e n la E c u a c i ó n 15. 2 ) E n la I P h e l v e c t o r d e p e r f u s i ó n d e f á r m a c o s a n e s t é s i c o s ( 5 ) q u e s e a d m i n i s t r a a l p a c i e n t e ( 1 ) s e c o r r e s p o n d e c o n e l v e c t o r d e p e r f u s i o n e s d e l p r o t o c o lo m a n u a l ( 4 ) t a l y c o m o s e m o s t r ó e n la e c u a c i ó n [ 2. 3 ] . 3 ) A l f i n a l d e la I P h s e r e a l i z a e l a j u s t e d e l a s m a t r i c e s d e g a n a n c i a s m o s t r a d a s e n l a s e c u a c i o n e s [ 5. 4 ], [ 5. 5 ] y [ 5. 6 ] y e n g e n e r a l d e t o d o s l o s p a r á m e t r o s m o s t r a d o s e n la E c u a c i ó n 14. 4 ) E n la M P h e l v e c t o r d e p e r f u s i ó n d e f á r m a c o s a n e s t é s i c o s ( 5 ) q u e s e a d m i n i s t r a a l p a c i e n t e ( 1 ) s e c o r r e s p o n d e c o n e l v e c t o r d e p e r f u s i o n e s a u t o m á t i c a s ( 22 ) . 5 ) E n la R P h e l v e c t o r d e p e r f u s i ó n d e f á r m a c o s a n e s t é s i c o s ( 5 ) q u e s e a d m i n i s t r a a l p a c i e n t e ( 1 ) s e a n u l a . E n u n a i t e r a c i ó n i n d e t e r m i n a d a d e l s i s t e m a d e c o n t r o l S y n P l D s e d e b e n d e s e g u i r l a s s i g u i e n t e s a c t u a c i o n e s y e n e l o r d e n i n d i c a d o : 1. H a y q u e c o m e n z a r p o r a d q u i r i r la i n f o r m a c i ó n d e l v e c t o r d e v a r i a b l e s d e m o n i t o r i z a c i ó n ( 6 ) u t i l i z a n d o l o s e q u i p o s d e m o n i t o r i z a c i ó n ( 3 ) , la i n f o r m a c i ó n a d q u i r i d a e n la i t e r a c i ó n a c t u a l y e n l a s i t e r a c i o n e s p a s a d a s s e a l m a c e n a n e n u n a m e m o r i a p a r a s u p o s t e r i o r u t i l i z a c i ó n ; la i n f o r m a c i ó n o b t e n i d a e n e s t a a c t u a c i ó n s e r v i r á p a r a la r e a l i m e n t a c i ó n d e l s i s t e m a d e c o n t r o l e n C L ; 2. H a y q u e f i j a r e l v e c t o r d e o b j e t i v o s d e l a s v a r i a b l e s m o n i t o r i z a d a s ( 8 ) ; e l r e s u l t a d o d e la i t e r a c i ó n a c t u a l y d e l a s i t e r a c i o n e s p a s a d a s s e a l m a c e n a n e n u n a m e m o r i a p a r a s u p o s t e r i o r u t i l i z a c i ó n ; 3. H a y q u e p r o c e d e r a la l i m p i e z a d e r u id o y a r t e f a c t o s d e l v e c t o r d e v a r i a b l e s d e m o n i t o r i z a c i ó n ( 6 ) m e d i a n t e u n b a n c o d e f i l t r o s ( 9 ) p a r a o b t e n e r e l v e c t o r d e v a r i a b l e s f i l t r a d a s d e m o n i t o r i z a c i ó n ( 10 ) ; e l r e s u l t a d o d e la i t e r a c i ó n a c t u a l y d e l a s i t e r a c i o n e s p a s a d a s s e a l m a c e n a n e n u n a m e m o r i a p a r a s u p o s t e r i o r u t i l i z a c i ó n ; 4. H a y q u e c a l c u l a r l o s v e c t o r e s d e lo s e r r o r e s d e c o n t r o l ( 12, 13, 14 ) m e d i a n t e u n g e n e r a d o r d e e r r o r e s d e c o n t r o l ( 11 ) ; c a d a v e c t o r d e e r r o r d e c o n t r o l e s t á f o r m a d o p o r n e r r o r a s i m é t r i c o p r o p o r c i o n a l, u n e r r o r s i m é t r i c o i n t e g r a l y u n e r r o r a s i m é t r i c o d e r i v a t i v o ; u t i l i z a n d o l o s i n s t a n t e s a c t u a l e s d e l v e c t o r d e o b j e t i v o s d e l a s v a r i a b l e s m o n i t o r i z a d a s ( 8 ) y d e l v e c t o r d e v a r i a b l e s f i l t r a d a s d e m o n i t o r i z a c i ó n ( 10 ) ; e l r e s u l t a d o d e la i t e r a c i ó n a c t u a l y d e l a s i t e r a c i o n e s p a s a d a s s e a l m a c e n a n e n u n a m e m o r i a p a r a s u p o s t e r i o r u t i l i z a c i ó n ; . H a y q u e c a l c u l a r e l v e c t o r d e p e r f u s i o n e s d e c o n t r o l ( 15 ) m e d i a n t e u n c o n t r o l a d o r m u l t i v a r i a b l e y c o n s i n e r g i a M I M O - P I D ( 16 ) q u e p r e s e n t a c o m o e n t r a d a s l o s v e c t o r e s d e l o s e r r o r e s d e c o n t r o l ( 12, 13, 14 ) y e l v e c t o r d e p e r f u s i o n e s d e l p r o t o c o l o m a n u a l ( 4 ) ; d e c a d a c o n t r o l a d o r S I S O - P I D s e o b t i e n e la c o n t r i b u c i ó n a c a d a f á r m a c o d e c a d a e r r o r d e c o n t r o l d i s t r i b u i d a e n u n a a c c i ó n p r o p o r c i o n a l q u e h a c e u s o d e la i t e r a c i ó n a c t u a l, u n a a c c i ó n i n t e g r a l q u e h a c e u s o d e la i t e r a c i ó n a c t u a l y t o d a s l a s p a s a d a s y u n a a c c i ó n d e r i v a t i v a q u e h a c e u s o d e la i t e r a c i ó n a c t u a l y d e la a n t e r i o r ; e l r e s u l t a d o d e la i t e r a c i ó n a c t u a l y d e la s i t e r a c i o n e s p a s a d a s s e a l m a c e n a n e n u n a m e m o r i a p a r a s u p o s t e r i o r u t i l i z a c i ó n ; . H a y q u e c a l c u l a r u n v e c t o r d e c o r r e c c i ó n ( 18 ) m e d i a n t e u n s i s t e m a c o r r e c t o r d e p e r f u s i o n e s ( 17 ) q u e p r e s e n t a a s u e n t r a d a e l v e c t o r d e v a r i a b l e s f i l t r a d a s d e m o n i t o r i z a c i ó n ( 10 ) d e la i t e r a c i ó n a c t u a l ; e l r e s u l t a d o d e la i t e r a c i ó n a c t u a l y d e la s i t e r a c i o n e s p a s a d a s s e a l m a c e n a n e n u n a m e m o r i a p a r a s u p o s t e r i o r u t i l i z a c i ó n ; . H a y q u e c a l c u l a r u n v e c t o r d e c o n t r o l f i a b l e ( 20 ) m e d i a n t e u n s i s t e m a d e s e g u r i d a d ( 19 ) q u e p r e s e n t a a s u e n t r a d a la i t e r a c i ó n a c t u a l d e l v e c t o r d e p e r f u s i o n e s d e c o n t r o l ( 15 ) y d e l v e c t o r d e c o r r e c c i ó n ( 18 ) ; e l r e s u l t a d o d e la i t e r a c i ó n a c t u a l y d e l a s i t e r a c i o n e s p a s a d a s s e a l m a c e n a n e n u n a m e m o r i a p a r a s u p o s t e r i o r u t i l i z a c i ó n ; . H a y q u e c a l c u l a r u n v e c t o r d e p e r f u s i o n e s a u t o m á t i c a s ( 22 ) m e d i a n t e u n s i s t e m a c u a n t i f i c a d o r ( 21 ) q u e p r e s e n t a a s u e n t r a d a la i t e r a c i ó n a c t u a l d e l v e c t o r d e c o n t r o l f i a b l e ( 20 ) ; e l r e s u l t a d o d e la i t e r a c i ó n a c t u a l y d e l a s i t e r a c i o n e s p a s a d a s s e a l m a c e n a n e n u n a m e m o r i a p a r a s u p o s t e r i o r u t i l i z a c i ó n ; . H a y q u e d e f i n i r e l v e c t o r d e p e r f u s i ó n d e f á r m a c o s a n e s t é s i c o s ( 5 ) m e d i a n t e u n s i s t e m a d e c o n m u t a c i ó n ( 23 ) q u e p r e s e n t a c o m o e n t r a d a s la i t e r a c i ó n a c t u a l d e l v e c t o r d e p e r f u s i o n e s d e c o n t r o l ( 15 ) , d e l v e c t o r d e p e r f u s i o n e s d e l p r o t o c o l o m a n u a l ( 4 ) y d e u n v e c t o r d e c e r o s ; e l r e s u l t a d o d e la i t e r a c i ó n a c t u a l y d e l a s i t e r a c i o n e s p a s a d a s s e a l m a c e n a n e n u n a m e m o r i a p a r a s u p o s t e r i o r u t i l i z a c i ó n ; 0. U n a v e z q u e s e h a o b t e n i d o e l v e c t o r d e p e r f u s i ó n d e f á r m a c o s a n e s t é s i c o s ( 5 ) s e c o m i e n z a u n a n u e v a i t e r a c i ó n, v o l v i e n d o a l p u n t o u n o d e e s t a l i s t a e i n c r e m e n t a n d o d e l n ú m e r o d e la i t e r a c i ó n . E l s i s t e m a d e m u l t i - p e r f u s i ó n d e f á r m a c o s a n e s t é s i c o s c o n s i n e r g i a m e d i a n t e c o n t r o l e n C L M I M O - P I D ( S y n P l D ) a p l i c a d o e n a c t o s a n e s t é s i c o s v í a I V d e la p r e s e n t e i n v e n c i ó n, e s t á p r e p a r a d o p a r a s u i n s t a la c i ó n e n b o m b a s d e p e r f u s i ó n i n t e l i g e n t e s q u e h a c e n u s o d e u n c i r c u i t o e l e c t r ó n i c o b a s a d o e n u n m i c r o p r o c e s a d o r c o n m e m o r i a, c o n f i g u r a d o p a r a d e t e r m i n a r e l v e c t o r d e p e r f u s i ó n d e f á r m a c o s a n e s t é s i c o s ( 5 ) p a r a a d m i n i s t r a r a l p a c i e n t e ( 1 ) p o r v í a I V e n u n a c t o q u i r ú r g i c o, c a d a p e r i o d o d e i t e r a c i ó n T s e s c o n f i g u r a b l e e n t r e 1 y 30 s e g u n d o s . E l v e c t o r d e p e r f u s i ó n d e f á r m a c o s a n e s t é s i c o s ( 5 ) t i e n e c o m o m i s i ó n o b t e n e r u n e s t a d o a n e s t é s i c o s a t i s f a c t o r i o d a d o p o r e l v e c t o r d e o b j e t i v o s d e la s v a r i a b l e s m o n i t o r i z a d a s ( 8 ) . E l s i s t e m a d e c o n t r o l S y n P l D e s t á c o n f i g u r a d o p a r a l l e v a r a c a b o e l m é t o d o p r e s e n t a d o e n la i n v e n c i ó n q u e s e r e p i t e c a d a T s s e g u n d o s, e l s i s t e m a c o m p r e n d e la e j e c u c i ó n d e l o s s i g u i e n t e s b l o q u e s : 1. Memoria : U n a m e m o r i z a c i ó n d e l h i s t ó r i c o d e d a t o s d e la i n f o r m a c i ó n p r o c e d e n t e d e lo s e q u i p o s d e m o n i t o r i z a c i ó n ( 3 ) , e l v e c t o r d e o b je t i v o s d e l a s v a r i a b l e s m o n i t o r i z a d a s ( 8 ) , v e c t o r d e v a r i a b l e s f i l t r a d a s d e m o n i t o r i z a c i ó n ( 10 ) , v e c t o r e s d e lo s e r r o r e s d e c o n t r o l ( 12, 13, 14 ) , v e c t o r d e p e r f u s i o n e s d e c o n t r o l ( 15 ) , v e c t o r d e c o r r e c c i ó n ( 18 ) , v e c t o r d e c o n t r o l f i a b l e ( 20 ) y v e c t o r d e p e r f u s i ó n d e f á r m a c o s a n e s t é s i c o s ( 5 ) r e a l i z a d a s p o r e l s i s t e m a d e b o m b a s d e p e r f u s i ó n ( 2 ) y d e l c ó d ig o i n f o r m á t i c o b a s a d o e n l a s i n s t r u c c i o n e s n e c e s a r i a s p a r a e j e c u t a r e l m é t o d o S y n P l D e n u n p r o c e s a d o r ; 2 . C ontador : U n c o n t a d o r d e t i e m p o s e l e c t r ó n i c o p a r a d e t e r m i n a r l a s f a s e s I P h, M P h y R P h, e s t i m a n d o q u e la I P h d u r a e n t r e 5 y 10 m i n u t o s, q u e la M P h e s m u y v a r i a b l e e n d u r a c i ó n e n f u n c i ó n d e la c i r u g í a y q u e la R P h d u r a e n t r e 10 y 20 m i n u t o s ; e s t e c o n t a d o r i m p l e m e n t a e l s i s t e m a d e c o n m u t a c i ó n ( 23 ) e n f o r m a d e c ó d i g o i n f o r m á t i c o y l a s i n s t r u c c i o n e s p e r t i n e n t e s p a r a e j e c u t a r l a s e n e l p r o c e s a d o r ; 3 . A juste : U n a r u t i n a s o f t w a r e q u e s e e j e c u t a e n e l t i e m p o tm p a r a a j u s t a r lo s p a r á m e t r o s d e l s i s t e m a d e c o n t r o l S y n P I D a c a d a p a c i e n t e ( 1 ) h a c ie n d o u s o d e l a s a c c i o n e s m o s t r a d a s e n la E c u a c i ó n 14 y d e la m e m o r i a d e l s i s t e m a ; 4 . Rutina 1 : R u t i n a s o f t w a r e r e u t i l i z a b l e p a r a la i m p l e m e n t a c i ó n d e l b a n c o d e f i l t r o s ( 9 ) h a c i e n d o u s o d e la m a t r i z d e g a n a n c i a s [KD] m o s t r a d a e n la e c u a c i ó n [ 5 . 6 ] y d e l c o e f i c i e n t e d e f i l t r a d o N p r e s e n t a d o e n la e c u a c i ó n [ 3. 4 ] ; la r u t i n a p u e d e s e r e j e c u t a d a v a r i a s v e c e s c o n p a r á m e t r o s d e e n t r a d a m o d i f i c a b l e s, la r u t i n a h a c e u s o d e la i n f o r m a c i ó n a l m a c e n a d a e n la m e m o r i a ; . Rutina 2 : R u t i n a s o f t w a r e r e u t i l i z a b l e p a r a la i m p l e m e n t a c i ó n d e l g e n e r a d o r d e e r r o r e s d e c o n t r o l ( 1 1 ) h a c i e n d o u s o d e l o s e l e m e n t o s d e l a s m a t r i c e s [B] y [G] d a d a s e n l a s e c u a c i o n e s [ 4. 3 ] y [ 4 . 5 ], c u y o s v a l o r e s e s t á n c o m p r e n d i d o s e n t r e 1 y 2 ; s e i m p l e m e n t a u n a s o l a r u t i n a c o n e l c ó d i g o d e o b t e n c i ó n d e l o s v e c t o r e s d e l o s e r r o r e s d e c o n t r o l ( 12, 13, 14 ) , la r u t i n a p u e d e s e r e j e c u t a d a v a r i a s v e c e s c o n p a r á m e t r o s d e e n t r a d a m o d i f i c a b l e s, la r u t i n a h a c e u s o d e la i n f o r m a c i ó n a l m a c e n a d a e n la m e m o r i a ; . Rutina 3 : R u t i n a s o f t w a r e r e u t i l i z a b l e p a r a la i m p l e m e n t a c i ó n d e l c o n t r o l a d o r m u l t i v a r i a b l e y c o n s i n e r g i a M I M O - P I D ( 16 ) h a c ie n d o u s o d e l o s c o n t r o l a d o r e s S I S O -P I D d e f i n i d o s e n l a s e c u a c i o n e s [ 5 . 14 ] y [ 5. 15 ] ; s e i m p l e m e n t a u n a s o l a r u t i n a c o n e l c ó d i g o d e e j e c u c i ó n d e c a d a c o n t r o l a d o r S I S O - P I D q u e f o r m a n l o s t r e s s u b s i s t e m a s d e c o n t r o l M I S O - P I D ( 25, 26, 27 ) y q u e a s u v e z f o r m a n e l c o n t r o l a d o r m u l t i v a r i a b l e y c o n s i n e r g i a M I M O - P I D ( 16 ) , la r u t i n a p u e d e s e r e j e c u t a d a v a r i a s v e c e s c o n p a r á m e t r o s d e e n t r a d a m o d i f i c a b l e s, la r u t i n a h a c e u s o d e la i n f o r m a c i ó n a l m a c e n a d a e n la m e m o r i a ; . Rutina 4 : R u t i n a s o f t w a r e q u e c a l c u l e e l v e c t o r d e p e r f u s i o n e s d e c o n t r o l ( 1 5 ) c o n l o s r e s u l t a d o s o b t e n i d o s d e a p l i c a r la R u t i n a 3 r e la t i v a a l o s r e s u l t a d o s d e l o s c o n t r o l a d o r e s S I S O - P I D y d e l v e c t o r d e p e r f u s i o n e s d e l p r o t o c o l o m a n u a l ( 4 ) , m o s t r a d o s e n la s e c u a c i o n e s [ 5. 14 ] y [ 2. 4 ] [ 2. 5 ] ; s e i m p l e m e n t a u n a s o l a r u t i n a c o n e l c ó d i g o d e e j e c u c i ó n d e o b t e n e r e l v e c t o r d e p e r f u s i o n e s d e c o n t r o l ( 15 ) , la r u t i n a h a c e u s o d e la i n f o r m a c i ó n a l m a c e n a d a e n la m e m o r i a ; . Rutina 5 : R u t i n a s o f t w a r e r e u t i l i z a b l e p a r a la i m p l e m e n t a c i ó n d e l s i s t e m a c o r r e c t o r d e p e r f u s i o n e s ( 17 ) h a c i e n d o u s o d e l v e c t o r d e v a r i a b l e s f i l t r a d a s d e m o n i t o r i z a c i ó n ( 10 ) m o s t r a d o e n la e c u a c i ó n [ 3. 2 ], h a c i e n d o u s o d e l a s f r e c u e n c i a s d e c o r t e d e f i n i d a s e n la s e c u a c i o n e s [ 3. 3 ] y [ 3. 4 ] ; s e i m p l e m e n t a u n a s o l a r u t i n a c o n e l c ó d i g o d e e j e c u c i ó n d e l s i s t e m a c o r r e c t o r d e p e r f u s i o n e s ( 17 ) , la r u t i n a p u e d e s e r e j e c u t a d a v a r i a s v e c e s c o n p a r á m e t r o s d e e n t r a d a m o d i f i c a b l e s, la r u t i n a h a c e u s o d e la i n f o r m a c i ó n a l m a c e n a d a e n la m e m o r i a ; . Rutina 6 : R u t i n a s o f t w a r e r e u t i l i z a b l e p a r a la i m p l e m e n t a c i ó n d e l s i s t e m a d e s e g u r i d a d ( 19 ) h a c i e n d o u s o d e l v e c t o r d e p e r f u s i o n e s d e c o n t r o l ( 15 ) m o s t r a d o e n la s e c u a c i o n e s [ 6. 1 ] y [ 6 . 2 ], s e i m p l e m e n t a u n a s o l a r u t i n a c o n e l c ó d i g o d e e j e c u c i ó n d e l s i s t e m a d e s e g u r i d a d ( 19 ) , la r u t i n a p u e d e s e r e j e c u t a d a v a r i a s v e c e s c o n p a r á m e t r o s d e e n t r a d a m o d i f i c a b l e s, la r u t i n a h a c e u s o d e la i n f o r m a c i ó n a l m a c e n a d a e n la m e m o r i a ; 0 . Rutina 7 : R u t i n a s o f t w a r e r e u t i l i z a b l e p a r a la i m p l e m e n t a c i ó n d e l s i s t e m a c u a n t i f i c a d o r ( 21 ) h a c i e n d o u s o d e l v e c t o r d e c o n t r o l f i a b l e ( 20 ) m o s t r a d o s e n l a s e c u a c i o n e s [ 7. 1 ] y [ 7 . 2 ], s e i m p l e m e n t a u n a s o l a r u t i n a c o n e l c ó d i g o d e e j e c u c i ó n e l s i s t e m a c u a n t i f i c a d o r ( 21 ) , la r u t i n a p u e d e s e r e j e c u t a d a v a r i a s v e c e s c o n p a r á m e t r o s d e e n t r a d a m o d i f i c a b l e s, la r u t i n a h a c e u s o d e la i n f o r m a c i ó n a l m a c e n a d a e n la m e m o r i a .
Publicaciones:
ES2808969 (02/03/2021) - A1 Solicitud de patente con informe sobre el estado de la técnica
ES2808969 (11/10/2022) - B2 Patente de invención con examen
Eventos:
En fecha 23/04/2020 se realizó Registro Instancia de Solicitud
En fecha 23/04/2020 se realizó PETEX_Petición de examen sustantivo
En fecha 23/04/2020 se realizó Admisión a Trámite
En fecha 23/04/2020 se realizó Aceptación Tramitación CAP
En fecha 23/04/2020 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 27/04/2020 se realizó Superado examen de oficio
En fecha 16/02/2021 se realizó Realizado IET
En fecha 23/02/2021 se realizó 1109P_Comunicación Traslado del IET
En fecha 02/03/2021 se realizó Publicación Solicitud
En fecha 02/03/2021 se realizó Publicación Folleto Solicitud con IET (A1)
En fecha 27/05/2021 se realizó Registro Documentación no Identificada
En fecha 27/05/2021 se realizó 5215P_Observaciones del solicitante al IET, Opinión Escrita y/o alegaciones a observaciones de terceros
En fecha 17/06/2021 se realizó Validación petición y/o pago de examen sustantivo conforme
En fecha 27/01/2022 se realizó 3411X_Alta Mandatarios
En fecha 27/01/2022 se realizó Alta mandatario
En fecha 01/04/2022 se realizó El solicitante ha contestado pero existen nuevas objeciones a la concesión de la solicitud
En fecha 01/04/2022 se realizó Elaboración de examen sustantivo
En fecha 01/04/2022 se realizó 6120P_Notificación de examen sustantivo
En fecha 07/04/2022 se realizó Publicación de examen sustantivo
En fecha 06/06/2022 se realizó 5127P_Subsanación a defectos en examen sustantivo
En fecha 24/09/2022 se realizó Designación de Comisión de Expertos
En fecha 27/09/2022 se realizó Finalización de Examen Sustantivo
En fecha 27/09/2022 se realizó 6121P_Comunicación finalización de examen sustantivo
En fecha 03/10/2022 se realizó Publicación finalización de examen sustantivo
En fecha 04/10/2022 se realizó Concesión con examen sustantivo
En fecha 04/10/2022 se realizó Entrega título
En fecha 04/10/2022 se realizó 6125P_Notificación de concesión con examen sustantivo
En fecha 11/10/2022 se realizó Publicación concesión Patente
En fecha 11/10/2022 se realizó Publicación Folleto Concesión
En fecha 11/04/2023 se realizó Plazo expirado presentación de oposiciones contra la concesión de la Patente
Pagos:
23/04/2020 - Pago Tasas IET
21/10/2022 - Pago 03 Anualidad
18/05/2023 - Pago 04 Anualidad
+ ES-2808969_A11. Sistema para la multi-perfusión automática de fármacos con sinergia a pacientes por vía intravenosa, caracterizado por que comprende: - un subsistema de bombas de perfusión (2) , configurado para suministrar al paciente (1) una cantidad de fármacos; - un subsistema de monitorización (3) , configurado para medir un conjunto de variables fisiológicas con información del estado del paciente; - un subsistema de control (24) , configurado para adaptar la cantidad suministrada de cada fármaco (5) por el subsistema de bombas de perfusión (2) , basado en una cantidad de perfusión inicial predeterminada (4) , unos valores objetivo de monitorización (8) , una realimentación (6) de las variables fisiológicas medidas y una sinergia entre los fármacos, donde el subsistema de control comprende: o un módulo generador de errores de control (11) configurado para calcular errores (12, 13, 14) basado en los valores objetivo de monitorización (8) y la realimentación de las variables fisiológicas medidas; o un controlador (16) configurado para determinar una perfusión de control (15) para cada uno de los fármacos basada en los errores (12, 13, 14) calculados por el módulo generador de errores de control (11) y la cantidad de perfusión inicial predeterminada (4) ; o un módulo de corrección (17) configurado para recibir las medidas del conjunto de variables fisiológicas desde el subsistema de monitorización (3) y modificar la perfusión de control (15) del controlador (16) , incrementando en función de un umbral superior o disminuyendo en función de un umbral inferior, dicha perfusión para conducir las variables fisiólogicas a un rango seguro preestablecido para las variables fisiológicas; y o un módulo de seguridad (19) configurado para recibir la perfusión de control (15) de cada fármaco y modificar dicha perfusión limitándola entre dos valores de perfusión, un límite inferior y otro límite superior, que aseguran la no hipermedicación para cada fármaco. 2. Sistema de acuerdo a la reivindicación 1 donde el módulo generador de errores de control (11) está configurado para generar, por cada una de las variables del conjunto de ariables fisiológicas con información del estado del paciente a medir por el subsistema de monitorización (3) , un vector de control (12, 13, 14) y donde el controlador es de carácter multivariable tipo MIMO y comprende un subsistema de control MISO para cada fármaco, que a su vez comprende controladores SISO configurados para recibir los errores de control y determinar un vector de perfusión de control (15) para cada fármaco. 3. Sistema de acuerdo a cualquiera de las reivindicaciones anteriores que además comprende un módulo cuantificador conectado entre el módulo de seguridad (19) y el subsistema de bombas de perfusión (2) , donde el módulo cuantificador está configurado para adaptar el vector de salida del módulo de seguridad de manera que sea interpretable por las bombas de perfusión (2) . 4. Sistema de acuerdo a cualquiera de las reivindicaciones anteriores, donde el subsistema de control (24) además comprende un banco de filtros (9) configurado para recibir las señales de realimentación (6) enviada por el subsistema de monitorización (3) . 5. Sistema de acuerdo a cualquiera de las reivindicaciones anteriores donde el módulo generador de errores de control (11) comprende varios submódulos de generador de errores para cada una de las variables del conjunto de variables monitorizadas con información del estado del paciente a medir por el subsistema de monitorización (3) . 6. Sistema de acuerdo a cualquiera de las reivindicaciones anteriores, donde los fármacos son fármacos anestésicos que inducen al paciente a un estado anestésico y donde el conjunto de variables fisiológicas que mide el subsistema de monitorización tienen información de dicho estado anestésico del paciente. 7. Sistema de acuerdo a la reivindicación 6 donde el conjunto de variables con información del estado anestésico del paciente comprenden eBIS, eNOX y eNMB o monitores equivalentes de hipnosis, nocicepción o relajación muscular, respectivamente. 8. Sistema de acuerdo a la reivindicación 7 donde el subsistema de bombas de perfusión (2) comprende: una primera bomba de perfusión de un fármaco con propiedades hipnóticas, una segunda bomba de perfusión de un fármaco con propiedades analgésicas y una tercera bomba de perfusión de un fármaco con propiedades de relajación muscular. 9. Sistema de acuerdo a la reivindicación 8 donde el fármaco con propiedades hipnóticas es propofol, el fármaco con propiedades analgésicas es remifentanilo y el fármaco con propiedades de relajación muscular es rocuronio. 10. Sistema de acuerdo a cualquiera de las reivindicaciones 8 o 9, que además comprende unas bombas adicionales para la perfusión de otros fármacos que alteren el estado anestésico o constantes vitales del paciente. 11. Sistema de acuerdo a cualquiera de las reivindicaciones anteriores donde el subsistema de control (24) está personalizado específicamente para el paciente basándose en métodos de sintonía del controlador a través de las varias ganancias relativas a cada controlador SISO y de al menos uno de los siguientes parámetros fisiológicos propios del paciente: peso, altura, sexo, masa muscular e historial clínico. 12. Sistema de acuerdo a cualquiera de las reivindicaciones 2-11 donde el controlador MIMO es un controlador multivariable MIMO-PID, los subsistemas de control MISO son subsistemas de control de tipo MISO-PID y los controladores SISO son de tipo SISO-PID. 13.Sistema de acuerdo a la reivindicación 12 donde el vector de control (12.13.14) del módulo generador de errores de control (11) , tiene una componente de error asimétrico proporcional (12.1, 13.1, 14.1) , una componente de error simétrico integral (12.2, 13.2, 14.2) , una componente de error asimétrico derivativo (12.3, 13.3, 14.3) y componentes de error adicionales, y donde los controladores SISO-PID (25.1, 25.2, 25.3, 26.1, 26.2, 26.3, 27.1, 27.2, 27.3) están configurados para recibir respectivamente la componente de error asimétrico proporcional, la componente de error simétrico integral y la componente de error asimétrico derivativo de cada vector de control y determinar el vector de perfusión de control (15) para cada fármaco. 14. Sistema de acuerdo a cualquiera de las reivindicaciones anteriores donde el subsistema de control (24) está además configurado para el control de la glucosa de pacientes enfermos de diabetes tipo 1, donde el subsistema de monitorización además está configurado para medir la glucosa del paciente y donde el subsistema de perfusión está además configurado para suministrar al paciente una cantidad continua y controlada de insulina y glucagón.
+ ES-2808969_B21. S i s t e m a p a r a l a m u l t i - p e r f u s i ó n a u t o m á t i c a d e f á r m a c o s c o n s i n e r g i a a p a c i e n t e s p o r v í a i n t r a v e n o s a, c a r a c t e r i z a d o p o r q u e c o m p r e n d e : - u n s u b s i s t e m a d e b o m b a s d e p e r f u s i ó n ( 2 ) , c o n f i g u r a d o p a r a s u m i n i s t r a r a l p a c ie n t e ( 1 ) u n a c a n t i d a d d e f á r m a c o s ; - u n s u b s i s t e m a d e m o n i t o r i z a c i ó n ( 3 ) , c o n f i g u r a d o p a r a m e d i r u n c o n j u n t o d e v a r i a b l e s f i s i o l ó g i c a s c o n i n f o r m a c i ó n d e l e s t a d o d e l p a c ie n t e ; - u n s u b s i s t e m a d e c o n t r o l ( 24 ) , c o n f i g u r a d o p a r a a d a p t a r la c a n t i d a d s u m i n i s t r a d a d e c a d a f á r m a c o ( 5 ) p o r e l s u b s i s t e m a d e b o m b a s d e p e r f u s i ó n ( 2 ) , b a s a d o e n u n a c a n t i d a d d e p e r f u s i ó n i n i c i a l p r e d e t e r m i n a d a ( 4 ) , u n o s v a l o r e s o b j e t i v o d e m o n i t o r i z a c i ó n ( 8 ) , u n a r e a l i m e n t a c i ó n ( 6 ) d e l a s v a r i a b l e s f i s i o l ó g i c a s m e d i d a s y u n a s i n e r g i a e n t r e lo s f á r m a c o s, d o n d e e l s u b s i s t e m a d e c o n t r o l c o m p r e n d e : o u n m ó d u l o g e n e r a d o r d e e r r o r e s d e c o n t r o l ( 1 1 ) c o n f i g u r a d o p a r a c a l c u l a r e r r o r e s ( 12, 13, 14 ) b a s a d o e n l o s v a l o r e s o b j e t i v o d e m o n i t o r i z a c i ó n ( 8 ) y la r e a l i m e n t a c i ó n d e l a s v a r i a b l e s f i s i o l ó g i c a s m e d i d a s ; o u n c o n t r o l a d o r ( 1 6 ) c o n f i g u r a d o p a r a d e t e r m i n a r u n a p e r f u s i ó n d e c o n t r o l ( 1 5 ) p a r a c a d a u n o d e l o s f á r m a c o s b a s a d a e n l o s e r r o r e s ( 12, 13, 14 ) c a l c u l a d o s p o r e l m ó d u l o g e n e r a d o r d e e r r o r e s d e c o n t r o l ( 11 ) y la c a n t i d a d d e p e r f u s i ó n i n i c i a l p r e d e t e r m i n a d a ( 4 ) ; o u n m ó d u l o d e c o r r e c c i ó n ( 1 7 ) c o n f i g u r a d o p a r a r e c i b i r l a s m e d i d a s d e l c o n j u n t o d e v a r i a b l e s f i s i o l ó g i c a s d e s d e e l s u b s i s t e m a d e m o n i t o r i z a c i ó n ( 3 ) y m o d i f i c a r l a p e r f u s i ó n d e c o n t r o l ( 15 ) d e l c o n t r o l a d o r ( 16 ) , i n c r e m e n t a n d o e n f u n c i ó n d e u n u m b r a l s u p e r i o r o d i s m i n u y e n d o e n f u n c i ó n d e u n u m b r a l i n f e r i o r, d i c h a p e r f u s i ó n p a r a c o n d u c i r l a s v a r i a b l e s f i s i o l ó g i c a s a u n r a n g o s e g u r o p r e e s t a b l e c i d o p a r a l a s v a r i a b l e s f i s i o l ó g i c a s ; y o u n m ó d u l o d e s e g u r i d a d ( 1 9 ) c o n f i g u r a d o p a r a r e c ib i r l a p e r f u s i ó n d e c o n t r o l ( 15 ) d e c a d a f á r m a c o y m o d i f i c a r d i c h a p e r f u s i ó n l i m i t á n d o l a e n t r e d o s v a l o r e s d e p e r f u s i ó n, u n l í m i t e i n f e r i o r y o t r o l í m i t e s u p e r i o r, q u e a s e g u r a n l a n o h i p e r m e d i c a c i ó n p a r a c a d a f á r m a c o . s i e n d o e l e r r o r a s i m é t r i c o p r o p o r c i o n a l e v : e p = - B - y T + y f s i e n d o e l e r r o r a s i m é t r i c o d e r i v a t i v o e D : e D = - G • y T + y f s i e n d o y T u n v e c t o r d e o b je t i v o s d e l a s v a r i a b l e s f i s i o l ó g i c a s ; s i e n d o y f u n v e c t o r d e l a s v a r i a b l e s f i s i o l ó g i c a s f i l t r a d a s ; s i e n d o B u n a m a t r i z d i a g o n a l d e a s i m e t r í a e n e l e r r o r p r o p o r c i o n a l, t a l q u e : T d o n d e y t h b e s u n v e c t o r d e u m b r a l e s q u e d e t e r m i n a n e l v a l o r m á x im o d e d i a g { B ) ; s i e n d o G u n a m a t r i z d i a g o n a l d e a s i m e t r í a e n e l e r r o r d e r i v a t i v o, t a l q u e : d o n d e y t h g e s u n v e c t o r d e u m b r a l e s q u e d e t e r m i n a n e l v a l o r m á x im o d e d . i a g { G ) . 2. S i s t e m a d e a c u e r d o a c u a l q u i e r a d e l a s r e i v i n d i c a c i o n e s a n t e r i o r e s q u e a d e m á s c o m p r e n d e u n m ó d u l o c u a n t i f i c a d o r c o n e c t a d o e n t r e e l m ó d u l o d e s e g u r i d a d ( 19 ) y e l s u b s i s t e m a d e b o m b a s d e p e r f u s i ó n ( 2 ) , d o n d e e l m ó d u l o c u a n t i f i c a d o r e s t á c o n f i g u r a d o p a r a a d a p t a r e l v e c t o r d e s a l i d a d e l m ó d u l o d e s e g u r i d a d d e m a n e r a q u e s e a i n t e r p r e t a b l e p o r l a s b o m b a s d e p e r f u s i ó n ( 2 ) . 3. S i s t e m a d e a c u e r d o a c u a l q u i e r a d e l a s r e i v i n d i c a c i o n e s a n t e r i o r e s, d o n d e e l s u b s i s t e m a d e c o n t r o l ( 24 ) a d e m á s c o m p r e n d e u n b a n c o d e f i l t r o s ( 9 ) c o n f i g u r a d o p a r a r e c ib i r l a s s e ñ a l e s d e r e a l i m e n t a c i ó n ( 6 ) e n v i a d a p o r e l s u b s i s t e m a d e m o n i t o r i z a c i ó n ( 3 ) . 4. S i s t e m a d e a c u e r d o a c u a l q u i e r a d e l a s r e i v i n d i c a c i o n e s a n t e r i o r e s d o n d e e l m ó d u l o g e n e r a d o r d e e r r o r e s d e c o n t r o l ( 11 ) c o m p r e n d e v a r i o s s u b m ó d u l o s d e g e n e r a d o r d e e r r o r e s p a r a c a d a u n a d e l a s v a r i a b l e s d e l c o n j u n t o d e v a r i a b l e s m o n i t o r i z a d a s c o n i n f o r m a c i ó n d e l e s t a d o d e l p a c i e n t e a m e d i r p o r e l s u b s i s t e m a d e m o n i t o r i z a c i ó n ( 3 ) . 5. S i s t e m a d e a c u e r d o a c u a l q u i e r a d e l a s r e i v i n d i c a c i o n e s a n t e r i o r e s, d o n d e l o s f á r m a c o s s o n f á r m a c o s a n e s t é s i c o s q u e i n d u c e n a l p a c i e n t e a u n e s t a d o a n e s t é s i c o y d o n d e e l c o n j u n t o d e v a r i a b l e s f i s i o l ó g i c a s q u e m i d e e l s u b s i s t e m a d e m o n i t o r i z a c i ó n t i e n e n i n f o r m a c i ó n d e d i c h o e s t a d o a n e s t é s i c o d e l p a c ie n t e . 7. S i s t e m a d e a c u e r d o a la r e i v i n d i c a c i ó n 6 d o n d e e l s u b s i s t e m a d e b o m b a s d e p e r f u s i ó n ( 2 ) c o m p r e n d e : u n a p r i m e r a b o m b a d e p e r f u s i ó n d e u n f á r m a c o c o n p r o p i e d a d e s h i p n ó t i c a s, u n a s e g u n d a b o m b a d e p e r f u s i ó n d e u n f á r m a c o c o n p r o p i e d a d e s a n a l g é s i c a s y u n a t e r c e r a b o m b a d e p e r f u s i ó n d e u n f á r m a c o c o n p r o p i e d a d e s d e r e la j a c i ó n m u s c u l a r . 8. S i s t e m a d e a c u e r d o a l a r e i v i n d i c a c i ó n 7 d o n d e e l f á r m a c o c o n p r o p i e d a d e s h i p n ó t i c a s e s p r o p o f o l, e l f á r m a c o c o n p r o p i e d a d e s a n a l g é s i c a s e s r e m i f e n t a n i l o y e l f á r m a c o c o n p r o p i e d a d e s d e r e la j a c i ó n m u s c u l a r e s r o c u r o n i o . 9. S i s t e m a d e a c u e r d o a c u a l q u i e r a d e l a s r e i v i n d i c a c i o n e s 7 o 8, q u e a d e m á s c o m p r e n d e u n a s b o m b a s a d i c i o n a l e s p a r a l a p e r f u s i ó n d e o t r o s f á r m a c o s q u e a l t e r e n e l e s t a d o a n e s t é s i c o o c o n s t a n t e s v i t a l e s d e l p a c ie n t e . 10. S i s t e m a d e a c u e r d o a c u a l q u i e r a d e l a s r e i v i n d i c a c i o n e s a n t e r i o r e s d o n d e e l s u b s i s t e m a d e c o n t r o l ( 24 ) e s t á a d e m á s c o n f i g u r a d o p a r a e l c o n t r o l d e l a g l u c o s a d e p a c i e n t e s e n f e r m o s d e d i a b e t e s t i p o 1, d o n d e e l s u b s i s t e m a d e m o n i t o r i z a c i ó n a d e m á s e s t á c o n f i g u r a d o p a r a m e d i r l a g l u c o s a d e l p a c i e n t e y d o n d e e l s u b s i s t e m a d e p e r f u s i ó n e s t á a d e m á s c o n f i g u r a d o p a r a s u m i n i s t r a r a l p a c i e n t e u n a c a n t i d a d c o n t i n u a y c o n t r o l a d a d e i n s u l i n a y g l u c a g ó n .
Los productos y servicios protegidos por este registro son:
A61B 5/00 - A61M 5/172 - G16H 20/17
Descripciones:
+ ES-2808969_A1 SISTEMA DE PERFUSIÓN DE FÁRMACOS EN LAZO CERRADO CON CONTROL SINÉRGICO SECTOR DE LA TÉCNICA La presente invención se encuadra en el campo del control en lazo cerrado (closed-loop, CL) para la perfusión automática de fármacos, por ejemplo en actos de anestesia administrada por vía intravenosa (IV) , utilizando para ello un banco de algoritmos de control basados en variantes del controlador PID (proporcional-integral-derivativo) . La presente invención se enmarca en el sector de control automático de sistemas biológicos y presenta como principal campo de aplicación el multicontrol automatizado de las perfusiones de fármacos por vía IV en actos anestésicos. Pero puede ser empleado en el control de enfermedades agudas o crónicas en las que el paciente requiera de una monitorización múltiple con la perfusión de varios fármacos. Una aplicación directa de esta invención sería la aplicación en el páncreas artificial para el control de la diabetes tipo 1 con monitorización de la glucosa y con la infusión continua exógena de insulina y glucagón (Peters, T. M., and A. Haidar. "Dualnhormone artificial páncreas: benefits and limitations compared with singleDhormone systems." Diabetic Medicine 35.4 (2018) : 450 459.) . De igual modo y con la misma idea se puede aplicar al sector veterinario para la dispensación simultánea de varios fármacos a los animales, con el fin de aplicarles anestesia. También podría ser usado para controlar patologías agudas o crónicas en las que se necesite monitorizar varias variables fisiológicas del animal y admistrarle varios fármacos de forma simultánea. ANTECEDENTES DE LA INVENCIÓN La definición de anestesiología, proporcionada por la American Board ofanaesthesiology, afirma que la anestesiología es la práctica de la medicina que proporciona insensibilidad al dolor durante procedimientos quirúrgicos, obstétricos, terapéuticos y de diagnóstico. Los anestesiólogos administran los fármacos por diferentes accesos del cuerpo humano ara establecer un estado en el que se puede realizar una cirugía no traumática para el paciente. Las técnicas actuales de anestesia general establecen tres objetivos principales que deben cumplirse: 1) profundidad de la hipnosis (en inglés, Depth of Hypnosis, DoH) ; 2) analgesia (ANG) y 3) relajación muscular (en inglés, Muscle Relaxation, MRX) . Existen métodos para estimar estas variables (en esta descripción se referirá a estas variables como monitores) , respectivamente: 1) el índice biespectral (BIS) es una medida de electroencefalograma multifactorial derivada empíricamente, cuyo índice dado se correlaciona con la DoH del paciente (G. Schneider et al., Detection of awareness in surgical patients with eeg-based indicesbispectral index and patient state index, British journal of anaesthesia 91 (3) (2003) 329-335) ; 2) el índice de respuesta de estimulación nociceptiva (NOX) es un índice univariante calculado a partir de las concentraciones ponderadas del fármaco empleado, propuesto para predecir la probabilidad de respuesta a un estímulo nociceptivo durante la anestesia (P. Schumacher et al., Time-based online display of a noxious stimulus response index base on pharmacological data, in: Annual Meeting of the American Society of Anesthesiologists. San Francisco, California. Anesthesiology, Vol. 107, 2007, p. A17) ; y 3) el relajante muscular se administra con el fin de mantener el nivel deseado de bloqueo neuromuscular (NMB) durante la cirugía (Á. Miranda et al., Optimal time for constant drug infusion initialization in neuromuscular blockade control, in: 2014 IEEE International Symposium on Medical Measurements and Applications (MeMeA) , IEEE, 2014, pp. 1-6) . Adicionalmente, existen otras variables fisiológicas objeto de monitorización y de mucho interés para el especialista como son la cardiografía, la presión arterial, la oxigenación en sangre o la capnografía. El proceso de anestesia general IV generalmente conocido como anestesia IV total, se desarrolla en un escenario clínico que se presenta generalmente en tres fases: 1) fase de inducción (en inglés induction phase, IPh) , los fármacos se administran mediante bolo y perfusión constante; el paciente es conducido al estado anestésico deseado, tratando de obtener los valores deseados de DoH, ANG y MRX lo más rápidamente posible; 2) fase de mantenimiento (en inglés, maintenance phase, MPh) , comienza el procedimiento quirúrgico, y se realiza una perfusión de diferentes fármacos modificados convenientemente por el anestesiólogo para mantener el estado anestésico deseado; los fármacos utilizados de forma simultánea pueden presentar un efecto sinérgico; el objetivo en esta fase es mantener el estado anestésico cercano a los valores objetivo; y 3) fase de recuperación (en inglés, recover y phase, RPh) , se detiene la administración de los ármacos para recuperar la consciencia, para eliminar ANG y MRX (F. Padula, C. lonescu, N. Latronico, M. Paltenghi, A. Visioli, G. Vivacqua, Optimized PID control of depth of hypnosis in anesthesia, Computer methods and programs in biomedicine 144 (2017) 21-35) . En la actualidad, los protocolos más utilizados en IV son las perfusiones controladas manualmente y el método Target Control Infusion (TCI) , que consiste en administrar una perfusión constante de los fármacos también durante la MPh, calculada adecuadamente a partir de un valor de referencia deseado de perfusión (Á. Miranda et al., Optimal time for constant drug infusion initialization in neuromuscular blockade control, in: 2014 IEEE International Symposium on Medical Measurements and Applications (MeMeA) , IEEE, 2014, pp. 1-6) . La administración de fármacos IV por perfusión ofrece múltiples ventajas (M. C. van den Nieuwenhuyzen et al., Burm Target-controlled infusion systems, Clinical pharmacokinetics 38 (2) (2000) 181-190) . Sin embargo, varios factores no hacen tan evidente el uso de TCI en la práctica clínica, como la experiencia del anestesista, la preferencia personal, la variabilidad clínica farmacocinética interindividual y la comprensión de los principios de la TCI. En consecuencia, TCI se ha convertido en el puente entre la investigación en curso y la práctica clínica actual, abriendo la posibilidad de diseñar sofisticados sistemas de automatización. La aplicación del control con realimentación sobre los fármacos de perfusión en anestesia ha sido ampliamente investigado ya que el control automático en CL presenta una serie de ventajas socio-económicas, como son: 1) la reducción de costes tanto para el paciente como para el sistema sanitario, al igual que la reducción de la carga de trabajo del anestesiólogo; 2) la reducción de la dosis utilizada, lo que implica un tiempo de recuperación más rápido y, en consecuencia, una mejor recuperación del paciente en el postoperatorio; y 3) un rendimiento más robusto con menos episodios de sobre/infradosificación. En resumen, esto se traduce en una mayor seguridad clínica para el paciente (F. Padula et al., Optimized PID control of depth of hypnosis in anesthesia, Computer methods and programs in biomedicine 144 (2017) 21-35) . Sin embargo, aunque se han desarrollado varios sistemas en las últimas décadas, todos ellos siguen siendo prototipos sin marca CE ni aprobación de la FDA para su uso clínico. El control automático en anestesia pretende mantener un estado anestésico satisfactorio cercano a los valores objetivo de las variables de monitorización deseadas además de un alto rechazo a las perturbaciones consideradas como las modificaciones en el estado nestésico ocasionadas por la actuación del cirujano (F. Padula et al, Optimized PID control of depth of hypnosis in anesthesia, Computer methods and programs in biomedicine 144 (2017) 21-35) . Kai Kuck, en su artículo "The Three Laws of Autonomous and Closed-Loop Systems in anaesthesia" (Kuck, K., & Johnson, K. B. The three laws of autonomous and closed-loop systems in anesthesia. Anesthesia & Analgesia 124 (2017) 377-380) , postula tres leyes a las cuales los sistemas autónomos de anestesia deben estar sujetos: 1) no hacer daño, el sistema debe ser seguro para el paciente y en caso de fallo, debe fallar ligeramente, descartando cualquier tipo de peligro; 2) ser transparente, esto es, el sistema debe ejecutar los objetivos establecidos de forma fiable y comprensible, permitiendo al anestesiólogo predecir su comportamiento; y 3) reducir la carga de trabajo, el sistema en sí no debe requerir una atención excesiva para mantener una función adecuada, permitiendo que el anestesiólogo se centre en otras tareas más importantes. Los algoritmos de control más comunes utilizados en CL en anestesia son: modelo de control interno, modelo de control predictivo, control proporcional integral y derivativo (PID) y control basado en inteligencia artificial (F. Padula et al, Optimized PID control of depth of hypnosis in anesthesia, Computer methods and programs in biomedicine 144 (2017) 21-35) . Aun así, la opción más eficaz sigue siendo el control mediante PID, objeto de propuestas recientes y variadas. Además, se ha demostrado cómo el rendimiento alcanzado por un controlador PID correctamente ajustado aplicado en anestesia, tiene el mismo o mejor rendimiento que cualquier otro controlador, independientemente de su complejidad (L. Merigo et al, Event based control of propofol and remifentanil coadministration during clinical anesthesia, in: 2017 3rd International Conference on Event-Based Control, Communication and Signal Processing, IEEE, 2017, pp. 1-8) . Los controladores PID han sido utilizados mediante diferentes enfoques de diseño para abordar el problema de automaticación del acto anestésico. Existen propuestas primarias para la coadministración de PPF y RMF guiadas por BIS (N. Liu et al., Closed-loop coadministration of propofol and remifentanil guided by bispectral index: a randomized multicenter study, Anesthesia & Analgesia 112 (3) (2011) 546- 557) , pero también se presenta un enfoque de diseño más complejos (K. van Heusden et al., Robust miso control of propofol-remifentanil anesthesia guided by the neurosense monitor, IEEE Transactions on Control Systems Technology 26 (5) (2018) 1758-1770) , ofreciendo un controlador de salida única multientrada (MISO) para anestesia PPF-RMF guiado por la retroalimentación de una medida de DoH. Se han implementado otros enfoques basados en controladores PID para regular la DoH en anestesia utilizando la administración de PPF y el BIS como una variable controlada, con la diferencia de que Padula y su equipo (F. Padula et al., Optimized PID control of depth of hypnosis in anesthesia, Computer methods and programs in biomedicine 144 (2017) 21-35) establecen un conjunto de doce pacientes virtuales (VPs) representativos de una varianza poblacional relativamente grande que se utiliza para probar la robustez del controlador; y Merigo (L. Merigo et al., Event based control of propofol and remifentanil coadministration during clinical anesthesia, in: 2017 3rd International Conference on Event-Based Control, Communication and Signal Processing (EBCCSP) IEEE, 2017, pp. 1-8) propone un nuevo generador de eventos con altas propiedades de filtrado de ruido, además de un controlador PIDPlus, donde la acción de control se actualiza sólo cuando ocurre un evento. Por último, Merigo y su equipo (L. Merigo et al., A model-based control scheme for depth of hypnosis in anesthesia, Biomedical Signal Processing and Control 42 (2018) 216-229) realizaron un algoritmo de control PID basado en el modelo farmacocinético y farmacodinámico del paciente para la administración de PPF, cuya concentración estimada en el lugar de efecto se utiliza como señal de retroalimentación. Algunos de los trabajos más recientes ofrecen diferentes arquitecturas de esquemas de control PID, como Pawlowski y su equipo (A. Pawlowski et al, Two-degreeof-freedom control scheme for depth of hypnosis in anesthesia, IFACPapersOnLine 51 (4) (2018) 72 77) , que presentan un PID de dos grados de libertad para DoH, utilizando BIS como variable controlada. Presentan dos filtros, uno de primer orden y otro de segundo orden paso bajo, para obtener una respuesta adecuada a los cambios de producidos en la señal de referencia. Otro enfoque destacable es el presentado recientemente por Merigo (L. Merigo et al., Optimized pid control of propofol and remifentanil coadministration for general anesthesia, Communications in Nonlinear Science and Numerical Simulation 72 (2019) 194-212) , donde se propone un sistema optimizado en CL basado en PID para DoH mediante el uso de PPF-RMF y BIS. En este trabajo, el sintonizado se ha realizado mediante la aplicación de PSO (Particle Swarm Optimization) a una cohorte de 13 VPs. Se han identificado una serie de dificultades relacionadas con los problemas en el control en CL del acto anestésico que deben ser abordadas: 1) el control unilateral, debido a la o consideración de fármacos antagonistas; 2) los retardos, las oscilaciones en CL y las inestabilidades aumentan a causa de los retardos; 3) las variables a controlar no son las variables procedentes de los monitores (las mediciones) ; 4) los fármacos presentan un efecto de memoria cuando se administran al paciente; y 5) la sinergia que pueden presentar los distintos fármacos a administrar. Además, en el estado del arte se han podido detectar ciertas limitaciones en la aplicación del control en CL en anestesia, estas son: 1) no existe una propuesta formal que combine los principales estados anestésicos (DoH, ANG y MRX) ; y 2) aunque los algoritmos basados en PID son efectivos para resolver el problema de control, éste no ha sido utilizado de forma multivariable para la perfusión de múltiples fármacos utilizando múltiples variables fisiológicas. En relación con la presente invención se han encontrado los siguientes documentos del estado de la técnica: - ES2297940T3 (2001) , Aparato para proporcionar a un paciente consciente alivio del dolor y la ansiedad asociados con procedimientos médicos o quirúrgicos. Se reivindica un sistema para proporcionar, a través de una gestión conservadora de equipo lógico informático, la entrega de uno o más fármacos amnésicos, analgésicos o sedantes con la monitorización electrónica de una o más condiciones fisiológicas del paciente. - CN1561241B (2002) , Apparatuses and methods for titrating drug deliver y . Se reivindica un sistema de suministro de fármacos a un paciente, en el que dicho sistema comprende: una interfaz de usuario para recibir información del usuario, un dispositivo de suministro de fármacos y un monitor fisiológico regulado por un algoritmo. - US8998808B2 (2004) , System for identifying patient response to anesthesia infusion. Se reivindica un aparato para la asistencia a un profesional durante la administración de un fármaco para la anestesia en un paciente, que comprende: un sistema de procesamiento que recibe los datos correspondientes, una memoria que almacena los datos, un procesador que resuelve la fórmula y una pantalla que muestra los datos resultantes al especialista anestesista. - ES2293366T3 (2006) , Sistema de suministro de fármaco intravenoso controlado por ordenador. Se reivindica un aparato para controlar y dirigir una anestesia IV /o la aplicación de otros fármacos IVs a un paciente. Además, almacena los datos del experto beneficiario del sistema, siendo estos recuperables. - ES2267767 (2007) , System and method of adaptative drug deliver y . Se reivindica un Sistema para determinar y mantener un nivel de concentración de fármaco deseado en un paciente para determinar y mantener un efecto deseado sobre ese paciente. El sistema comprende un conjunto de sensores, una unidad de suministro de fármaco y un controlador en CL de suministro con una entrada acoplada a dicho conjunto y una salida acoplada a dicha unidad de suministro. - JP5792629B2 (2009) , System for controlling the means for injection of anesthetic or sedative agents. Se reivindica un sistema de control de anestesia IV para la inducción y mantenimiento de la sedación, el cual contiene los medios para la adquisición y análisis de la señal de control. - ES2429688 (2013) , Apparatuses and methods for titrating drug deliver y . Se reivindica un Sistema para proporcionar la entrega de fármaco a un paciente. Dicho Sistema comprende una interfaz de usuario, un dispositivo de entrega del fármaco, múltiples monitores fisiológicos y un procesador que integra la interfaz del usuario. - CN103212119B (2013) , Based on target-controlled infusion pump bis anesthesia feedback controller. Se reivindica un sistema de control en lazo cerrazo basado en BIS el cual contiene un algoritmo de control PID borroso. - CN106859592A (2015) , TCI-based (target controlled infusion based) anesthesia depth intelligent control system. Se reivindica un sistema de control TCI inteligente basado en la monitorización del BIS en anestesia. - US20180296759A1 (2016) , Methods and systems for closed-loop control of drug administration. Se reivindica un sistema de control en circuito cerrado para la administración de al menos un fármaco a un paciente, el sistema de control que contiene: un actuador que administra el fármaco, uno o más monitores fisiológicos y un procesador que determina la señal de control. Referente a lo anteriormente expuesto, se pueden encontrar invenciones que reivindican sistemas de control basados en un solo monitor, concretamente, BIS (CN103212119B y CN106859592A) ; otras, de entre los diferentes principales estados anestésicos se refieren únicamente a la sedación (JP5792629B2) . Una de las patentes más avanzadas reivindica un sistema para la perfusión de al menos un fármaco en base a uno o más monitores fisiológicos; sin embargo, dicha invención basa su control en el uso de un controlador de modelos predictivos (en inglés, Model Predictive Controller, MPC) en los que tampoco consta la atención a la sinergia que pueden presentar los fármacos empleados. No existe indicio alguno de que en la actualidad haya un sistema de bombas de perfusión que integre el método de multi-perfusión de fármacos anestésicos con control MIMO-PID aplicado en actos anestésicos vía IV, configurable a la cantidad de fármacos utilizados, a la cantidad de variables de monitorización que se utilicen y que considere la relación sinérgica existente entre los diferentes fármacos empleados. Adicionalmente, no existe indicio alguno de un método que contemple la multi-perfusión de otros tipos de fármacos diferentes a los empleados en anestesia. DESCRIPCIÓN DE LA INVENCIÓN Para ayudar a comprender el método que se ejecuta en un sistema electrónico, inicialmente se presentan los listados con los nombres y su significado de abreviaturas, variables y sistemas. Con las abreviaturas se simplifican nombres largos que aparecen con mucha frecuencia en el texto, con este listado se favorece la comprensión de la lectura hasta la familiarización de los conceptos por parte del lector (si el acrónimo refiere a un nombre en plural este terminará con "s", por ejemplo "IV" se refiere a intravenoso e "IVs" se refiere a intravenosos) . A continuación, se relacionan las abreviaturas por orden alfabético: Abreviatura Significado A Analgesia C (Closed-loop) lazo cerrado D Derivativo D (Depth ofHypnosis) profundidad hipnótica e (Bispectral Index) índice biespectral o monitor equivalente de hipnosis e (Neuromuscular Blockade Index) o monitor equivalente de relajación muscular e (Noxious Stimulation Response Index) o monitor equivalente de nocicepción e Propofol o fármaco equivalente con propiedades hipnóticas e Rocuronio o fármaco equivalente con propiedades de bloqueo muscular e Remifentanilo o fármaco equivalente con propiedades analgésicas I Integral IP (Induction phase) fase de inducción IV Intravenoso o Intravenosa MI Sistema controlador PID de múltiple entrada y múltiple salida MI Sistema controlador PID de múltiple entrada y salida única M (Maintenance phase) fase de mantenimiento M (Muscle relaxation) relajación muscular O (Open- loop) lazo abierto P Proporcional PI Sistema controlador Proporcional, Integral y Derivativo R (Recover y phase) fase de recuperación SI Controlador PID de simple entrada y simple salida S Controlador MIMO-PID con sinergia Con el listado de variables se pretende que el lector tenga una rápida y fácil familiarización con sus nombres, conceptos que definen y su ubicación en las figuras. Las variables referenciadas en negrita y entre [corchetes] definen matrices, las referenciadas solo en n egrita definen vectores columna (se realiza una transposición para facilitar su escritura e interpretación) , las referenciadas en itática y sin negrita definen variables escalares . A continuación, se relacionan las más importantes según el orden de aparición en la desc cripción: Nombre Definición de la variable y Vector de variables de monitorización (6) yi Monitor eBIS (6.1) Y2 Monitor eNOX (6.2) ys Monitor eNMB (6.3) Upt Vector de perfusión continua de fármacos anestésicos (5) Uptl Perfusión continua del ePPF (5.1) Upt2 Perfusión continua del eRMF (5.2) Upt3 Perfusión continua del eRCN (5.3) dsur Vector de actuaciones quirúrgicas (7) Uol Vector de perfusiones del protocolo manual (4) u0n Perfusión manual del ePPF (4.1) Uoí2 Perfusión manual del eRMF (4.2) Uol3 Perfusión manual del eRCN (4.3) d Vector de bolos manuales al inicio di Bolo manual ePPF Ó2 Bolo manual eRMF ds Bolo manual eRCN D Vector que contiene los bolos por unidad de masa de inducción Di Dosis ePPF D2 Dosis eRMF Ds Dosis eRCN rol Vector de perfusión de la IPh r0ti Perfusión de inducción de ePPF r0i2 Perfusión de inducción de eRMF r0i3 Perfusión de inducción de eRCN R Vector de perfusión constante en IPh Ri Perfusión constante de ePPF r 2 Perfusión eonstante de eRMF r 3 Perfusión eonstante de eRCN p Veetor de la disminueión de la perfusión en MPh Pl Disminueión de perfusión ePPF P2 Disminueión de perfusión eRMF P3 Disminueión de perfusión eRCN w Peso del paeiente yx Veetor de objetivos de las variables monitorizadas (8) Yti Objetivo sobre el eBIS (8.1) Yt2 Objetivo sobre el eNOX (8.2) Yt3 Objetivo sobre el eNMB (8.3) yf Veetor de variables filtradas de monitorizaeión (10) Yfi Filtrado del eBIS (10.1) Yf2 Filtrado del eNOX (10.2) Yf3 Filtrado del eNMB (10.3) fe Veetor de freeueneias de eorte fl Freeueneia de eorte del filtro eBIS f2 Freeueneia de eorte del filtro eNOX f3 Freeueneia de eorte del filtro eNMB N Coefieiente de filtrado PID ei Veetor de error de eontrol del eBIS (12) epi eBIS proporeional (12.1) 6/í eBIS integral (12.2) eD1 eBIS derivativo eF1 eBIS derivativo filtrado (12.3) e2 Veetor de error de eontrol del eNOX (13) eP2 eNOX proporeional (13.1) e /2 eNOX integral (13.2) eD2 eNOX derivativo eF2 eNOX derivativo filtrado (13.3) e3 Veetor de error de eontrol del eNMB (14) eP3 eNMB proporeional (14.1) e/3 eNMB integral (14.2) eD3 eNMB derivativo eF3 eNMB derivativo filtrado (14.3) ep Veetor de errores asimétrieos proporeionales epi eBIS proporcional (12.1) ep2 eNOX proporcional (13.1) ep3 eNMB proporcional (14.1) ei Vector de errores simétricos integrales en eBIS integral (12.2) el2 eNOX integral (13.2) el3 eNMB integral (14.2) eo Vector de errores asimétricos derivativos eD1 eBIS derivativo eD2 eNOX derivativo eD3 eNMB derivativo eF Vector de errores asimétricos derivativos filtrados eFi eBIS derivativo filtrado (12.3) eF2 eNOX derivativo filtrado (13.3) eF3 eNMB derivativo filtrado (14.3) [B] Matriz de asimetría en la acción proporcional P Vector de asimetría en la acción proporcional Pii Ponderación eBIS P22 Ponderación eNOX P33 Ponderación eNMB ythb Vector de umbrales que determinan el valor máximo de p ythbl Umbral p eBIS ythb2 Umbral p eNOX ythb3 Umbral p eNMB [G] Matriz de asimetría en la acción derivativa 1 Vector de asimetría en la acción derivativa 7ii Ponderación eBIS Y22 Ponderación eNOX /33 Ponderación eNMB ythg Vector de umbrales que determinan el valor máximo de 1 ythg1 Umbral 1 eBIS ythg2 Umbral 1 eNOX ythg3 Umbral 1 eNMB Up¡d Vector de perfusiones de control (15) Ui Perfusión de control de ePPF (15.1) u2 Perfusión de control de eRMF (15.2) U3 Perfusión de control de eRCN (15.3) [KP] Matriz de ganancias proporcionales KP Vector de ganancias proporcionales directas Kp¡ Vector de ganancias proporcionales relativo al fármaco i Kpu Ganancia proporcional relativa monitor j y al fármaco i [K, ] Matriz de ganancias integrales K, Vector de ganancias integrales directas K, ¡ Vector de ganancias integrales relativo al fármaco i Km Ganancia integral relativa monitor j y al fármaco j y monitor j [T, ] Matriz de tiempos de acción integral T, Vector de tiempos de acción integral directos T, ¡ Vector de tiempos de acción integral relativo al fármaco i T, j Tiempo de acción integral relativa monitor j y al fármaco i [Kd ] Matriz de ganancias derivativas k d Vector de ganancias derivativas directas Kd ¡ Vector de ganancias derivativas relativo al fármaco i Kdij Ganancia derivativa relativa monitor j y al fármaco i [Td ] Matriz de tiempos de acción derivativa Td Vector de tiempos de acción derivativa directos Td ¡ Vector de tiempos de acción derivativa relativo al fármaco i Tdíj Tiempo de acción derivativa relativa monitor j y al fármaco i [SYN] Matriz de sinergia de fármacos s¡ Vector de sinergias relativa al fármaco i Su Sinergia relativa al controlador C K0i Vector de ganancias sobre el vector de perfusiones del protocolo manual Km Ganancia que modula la perfusión del protocolo manual relativa al ePPF KoI2 Ganancia que modula la perfusión del protocolo manualrelativa al eRMF Koí3 Ganancia que modula la perfusión del protocolo manualrelativa al eRCN Ucr Vector de corrección (18) UCr1 Perfusión correctora del ePPF (18.1) UCr2 Perfusión correctora del eRMF (18.2) Ucr3 Perfusión correctora del ePPF (18.3) Yl o Vector de umbrales inferiores de activación de la corrección Li Umbral inferior relativo al eBIS - 2 Umbral inferior relativo al eNOX L3 Umbral inferior relativo al eNMB Yhi Vector de umbrales superiores de activación de la corrección H1 Umbral superior relativo al eBÍS h 2 Umbral superior relativo al eNOX H3 Umbral superior relativo al eNMB Usf Vector de control fiable (20) Usf1 Perfusión fiable del ePPF (20.1) Usf2 Perfusión fiable del eRMF (20.2) Usf3 Perfusión fiable del eRCN (20.3) Ulo Vector de límites inferiores de la perfusión de fármacos UL1 Límite inferior relativa al ePPF U¡_2 Límite inferior relativa al eRMF UL3 Límite inferior relativa al eRCN Uhi Vector de límites superiores de la perfusión de fármacos UH1 Límite superior relativa al ePPF UH2 Límite superior relativa al eRMF UH3 Límite superior relativa al eRCN Uc| Vector de perfusiones automáticas (22) UC\1 Perfusión automática del ePPF (22.1) UcI2 Perfusión automática del eRMF (22.2) UC\3 Perfusión automática del eRCN (22.3) umn Vector de resoluciones del sistema de bombas de perfusión continua Umn1 Resolución de la bomba del ePPF Umn2 Resolución de la bomba del eRMF Umn3 Resolución de la bomba del eRCN ti Tiempo de inicio de la ÍPh tm Tiempo de inicio de la Mph tr Tiempo de comienzo de la RPh Ts Tiempo de ejecución del método [ ]' Trasposición de vectores y matrices Con el listado de sistemas se pretende una rápida y fácil ubicación de los mismos tanto en las figuras como en su descripción. A continuación, se relacionan según el orden de aparición en la descripción: Sistema Subsistema (1) paciente (2.1) bomba de perfusión del fármaco hipnótico (ePPF) (2) sistema de bombas (2.2) bomba de perfusión del fármaco analgésico (eRMF) de perfusión (2.3) bomba de perfusión del fármaco relajante (eRCN) (3.1) monitor de la DOH (eBIS) (3) equipos de (3.2) monitor de la ANG (eNOX) monitorización (3.3) monitor de la MRX (eNMB) (24) sistema de control multi-PID con sinergia (SynPlD) (9.1) filtro de la hipnosis (9) banco de filtros (9.2) filtro de la nocicepción (9.3) filtro de la relajación muscular 28: generador de error de la DoH (11) generador de 29: generador de error de la ANG errores de control 30: generador de error de la MRX (16) controlador multivaria ble y con sinergia MIMO-PID, denotado por la matriz [PID] (25) subsistema de (25.1) SISO-PID eBIS-ePPF, denotado por la variable C11 control MISO-PID-ePPF, (25.2) SISO-PID eNOX-ePPF, denotado por la variable C12 denotado por el vector (25.3) SISO-PID eNMB-ePPF, denotado por la variable C13 Cl (26) subsistema de (26.1) SISO-PID eBIS-eRMF, denotado por la variable C2i control MISO-PID-eRMF, (26.2) SISO-PID eNOX-eRMF, denotado por la variable C22 denotado por el vector (26.3) SISO-PID eNMB-eRMF, denotado por la variable C23 C2 (27) subsistema de (27.1) SISO-PID eBIS-eRCN, denotado por la variable C31 control MISO-PID-eNMB, (27.2) SISO-PID eNOX-eRCN, denotado por la variable C32 denotado por el vector (27.3) SISO-PID eNMB-eRCN, denotado por la variable C33 C3 (19.1) subsistema de seguridad de la infusion del ePPF (19) sistema de (19.2) subsistema de seguridad de la infusion del eRMF seguridad (19.3) subsistema de seguridad de la infusion del eRCN (21.1) subsistema cuantificador de la infusion del ePPF (21) sistema (21.2) subsistema cuantificador de la infusion del eRMF cuantificador (21.3) subsistema cuantificador de la infusion del eRCN (23) sistema de conmutación La presente invención se refiere a un sistema para la multi-perfusión automática de fármacos con sinergia a pacientes por IV, que comprende: - un subsistema de bombas de perfusión (2) , configurado para suministrar al paciente (1) una cantidad de fármacos; - un subsistema de monitorización (3) , configurado para medir un conjunto de variables fisiológicas con información del estado del paciente; - un subsistema de control (24) , configurado para adaptar la cantidad suministrada de cada fármaco (5) por el subsistema de bombas de perfusión (2) , basado en una cantidad de perfusión inicial predeterminada (4) , unos valores objetivo de monitorización (8) , una realimentación (6) de las variables fisiológicas medidas y una sinergia entre los fármacos, donde el subsistema de control comprende: o un módulo generador de errores de control (11) configurado para calcular errores (12, 13, 14) basado en los valores objetivo de monitorización (8) y la realimentación de las variables fisiológicas medidas; o un controlador (16) configurado para determinar una perfusión de control (15) para cada uno de los fármacos basada en los errores (12, 13, 14) calculados por el módulo generador de errores de control (11) y la cantidad de perfusión inicial predeterminada (4) ; o un módulo de corrección (17) configurado para recibir las medidas del conjunto de variables fisiológicas desde el subsistema de monitorización (3) y modificar la perfusión de control (15) del controlador (16) , incrementando en función de un umbral superior o disminuyendo en función de un umbral inferior, dicha perfusión para conducir las variables fisiólogicas a un rango seguro preestablecido para las variables fisiológicas; y o un módulo de seguridad (19) configurado para recibir la perfusión de control (15) de cada fármaco y modificar dicha perfusión limitándola entre dos valores de perfusión, un límite inferior y otro límite superior, que aseguran la no hipermedicación para cada fármaco, lo que permite trabajar a las variables fisiológicas en un rango serguro. Adicionalmente, se contemplan en el subsistema de control unos modulos de protección frente a sobredosificación o infradosificación con los módulos de seguridad (19) y corrección (17) configurados para mantener la perfusión de fármacos en unos valores seguros. En una de las realizaciones de la invención, se divulga un sistema de multi-perfusión con sinergia de fármacos anestésicos con sinergia mediante control en CL MIMO-PID (SynPlD) aplicado en actos anestésicos vía IV, este sistema es multidimensional configurable a la cantidad de fármacos utilizados y configurable a la cantidad de variables de monitorización que se utilicen. El sistema se implementa en un dispositivo electrónico, donde se ejecutan los siguientes pasos: paso 1.- obtener un vector de variables de monitorización de hipnosis (DoH) , analgesia (ANG) y relajación muscular (MRX) , adicionalmente otras variables de monitorización pueden ser usadas. De ahora en adelante se refiere a ellos como vector de variables de monitorización (6) que pueden ser el BIS, NOX y NMB u otros monitores equivalentes denotados como eBIS, eNOX y eNMB, de la DoH, ANG y MRX, respectivamente. El valor del vector de variables de monitorización (6) depende principalmente de la perfusión de los fármacos con propiedades hipnóticas, analgésicas y /o bloqueantes musculares, como son el propofol (PPF) , el remifentanilo (RMF) y el rocuronio (RCN) , aunque fármacos equivalentes pueden ser usados denotados como ePPF, eRMF y eRCN, adicionalmente otros fármacos anestésicos pueden ser usados. De ahora en adelante se refiere a ellos como como fármacos o drogas anestésicas que se infusionan al paciente vía IV; estos conforman el vector de perfusión de fármacos anetstésicos (5) . El vector de perfusión de fármacos anestésicos (5) se administra al paciente (1) mediante un sistema de bombas de perfusión (2) . Los equipos de monitorización (3) recogen sobre el paciente (1) los efectos de los fármacos anestésicos y el vector de actuaciones quirúrgicas (7) del médico cirujano en una intervención; paso 2.- para los fármacos anestésicos considerados, calcular el vector de perfusión de fármacos anestésicos (5) mediante un sistema de control MIMO-PID on sinergia (SynPlD) (24) a partir del vector de variables de monitorización (6) , del vector de perfusiones del protocolo manual (4) y del vector de objetivos de las variables monitorizadas (8) ; paso 3.- proceder a la limpieza de ruido y artefactos del vector de variables de monitorización (6) mediante un banco de filtros (9) para obtener un vector de variables filtradas de monitorización (10) ; paso 4.- calcular los vectores de errores de control (12, 13, 14) mediante un generador de errores de control (11) a partir del vector de variables filtradas de monitorización (10) y del vector de objetivos de las variables monitorizadas (8) ; particularmente consiste en calcular el vector de error de control del monitor eBIS (12) mediante un generador de error de la DoH (28) a partir de la monitorización filtrada de la hipnosis mediante el monitor eBIS (10.1) y de su valor objetivo (8.1) ; calcular el vector de error de control del monitor eNOX (13) mediante un generador de error de la ANG (29) a partir de la monitorización filtrada de la ANG mediante el monitor eNOX (10.2) y de su valor objetivo (8.2) ; calcular el vector de error de control del monitor eNMB (14) mediante un generador de error de la RMX (30) a partir de la monitorización filtrada de la MRX mediante el monitor eNMB (10.3) y de su valor objetivo (8.3) ; paso 5.- calcular un vector de perfusiones de control (15) mediante un controlador multivariable y con sinergia MIMO-PID (16) , compuesto por tres subsistemas de control MISO-PID (25, 26, 27) a partir de los vectores de errores de control (12, 13, 14) y del vector de perfusiones del protocolo manual (4) . Cada perfusión de control PID está formada por la suma de una perfusión proporcional, una perfusión integral y una perfusión derivativa. paso 6.- calcular un vector de corrección (18) mediante un sistema corrector de perfusiones (17) a partir del vector de variables filtradas de monitorización (10) ; paso 7.- calcular un vector de control fiable (20) mediante un sistema de seguridad (19) a partir del vector de perfusiones de control (15) y del vector de corrección (18) ; paso 8.- calcular un vector de perfusiones automáticas (22) mediante un sistema cuantificador (21) a partir del vector de control fiable (20) ; paso 9.- definir el vector de perfusión de fármacos anestésicos (5) aplicado al paciente (1) mediante un sistema de conmutación (23) a partir del vector de perfusiones del protocolo manual (4) y del vector de perfusiones automáticas (22) calculadas por el sistema de control SynPID (24) ; paso 10.- calcular la perfusión de control del fármaco ePPF (15.1) mediante un subsistema de control MISO-PID-ePPF (25) compuesto de tres controladores SISO-PID (25.1, 25.2, 25.3) que relacionan la perfusión del fármaco ePPF con los vectores de errores de control (12, 13, 14) ; paso 11.- calcular la perfusión de control del fármaco eRMF (15.2) mediante un subsistema de control MISO-PID-eRMF (26) compuesto de tres controladores SISO-PID (26.1, 26.2, 26.3) que relacionan la perfusión del fármaco eRMF con los vectores de los errores de control (12, 13, 14) ; paso 12.- calcular la perfusión de control del fármaco eRCN (15.3) mediante un subsistema de control MISO-PID-eNMB (27) compuesto de tres controladores SISO-PID (27.1, 27.2, 27.3) que relacionan la perfusión del fármaco eRCN con los vectores de los errores de control (12, 13, 14) . El sistema de multi-perfusión de fármacos anestésicos con sinergia mediante control en CL MIMO-PID aplicado en actos anestésicos vía IV es denominado sistema de control SynPID. SynPID necesita varios tipos de información para obtener el vector de perfusión de fármacos anestésicos (5) sobre los pacientes, a continuación se detallan las acciones y cálculos que hay que hacer en cada paso descrito anteriormente. El paso 2) ejecutado por el sistema de control SynPID adicionalmente comprende adquirir la información: 2.1.- Medir el vector de variables de monitorización (6) , Donde y es el vector de variables de monitorización (6) ; y? es el monitor eBIS; y2 es el monitor eNOX; y3 es el monitor eNMB y el resto de componentes del vector desde y4 a yr son otras posibles incorporaciones de monitores. El superíndice T significa transposición del vector. 2.2.- Definir el vector de perfusiones del protocolo manual (4) conocido como protocolo médico manual en lazo abierto (OP) , Donde uo es el vector de perfusiones del protocolo manual (4) ; uol? es la perfusión del protocolo manual para el ePPF; uol2 es la perfusión del protocolo manual para el eRMF; uol3 es la perfusión del protocolo manual para el eRCN y el resto de componentes del vector desde uol4 a uols son otras posibles decisiones de otros fármacos incorporados al sistema. 2.3.- Calcular el vector de perfusiones del protocolo manual (4) en OP, uol (0 = d (t, -) + rol ( / ) , [2. 3] 2.3.1.- Donde d es el vector de bolos manuales en el momento de iniciarse el IPh en el tiempo t, D = [A D2 ... Ds] \ Donde D es el vector que contiene los bolos por unidad de masa de cada fármaco; W es el peso del paciente y Ts es el periodo de ejecución. 2.3.2.- Donde ro es el vector de perfusión de los fármacos anestésicos en IPh, r nx [2. 5] R = K r 2 - RA p = [^i r 2 - p.Y ' Donde R es el vector de perfusión constante en IPh, desde t¡ donde comienza la IPh hasta tm donde comienza la MPh de la anestesia; P es el vector de la disminución de la perfusión en MPh; y W es el peso del paciente. 2.4.- Fijar el vector de objetivos de las variables monitorizadas (8) , Donde yT es el vector de objetivos de las variables monitorizadas (8) ; yT1 es el objetivo sobre el monitor eBIS; y2 es el objetivo sobre el monitor eNOX; y3 es el objetivo sobre el monitor eNMB y el resto de componentes del vector desde y4 a yr son otros posibles objetivos sobre las nuevas incorporaciones de monitores al método. El paso 3) ejecutado en el sistema de control SynPID adicionalmente comprende un banco de filtros (9) para: 3.1.- Calcular el vector de variables filtradas de monitorización (10) , Donde yf es el vector de variables filtradas de monitorización; yf1 es el filtrado del monitor eBIS; yf2 es el filtrado del monitor eNOX; yf3 es el filtrado del monitor eNMB y el resto de componentes del vector desde yf4 a yfr son los filtrados sobre las nuevas incorporaciones de monitores al sistema. 3.2.- Definir un banco de filtros (9) , basados en filtros paso bajo de orden nH, Donde y es el vector de variables de monitorización (6) ; yf es el vector de variables filtradas de monitorización (10) ; nH es el orden del filtro; fc es el vector de frecuencias de corte del banco de filtros (9) dada por, [3. 3] fc = [ f l f2 f r ] Donde fc es el vector de frecuencias de corte; f1 es la frecuencia de corte del filtro eBIS; f2 es la frecuencia de corte del filtro eNOX; f3 es la frecuencia de corte del filtro eNMB y el resto de componentes del vector desde f4 a fr son las frecuencias de corte del sistema de limpieza sobre las nuevas incorporaciones de filtros al sistema. El vector fc se calcula mediante la ecuación, fC = - r y üí .. [3. 4] A r-\ Donde N es el coeficiente de filtrado PID; y TD es el vector de tiempos de acción derivativa directo. El paso 4) ejecutado en el sistema de control SynPlD adicionalmente comprende un generador de errores de control (11) para: 4.1.- Calcular un vector de error de control del monitor eBIS e1 (12) con el generador de error de la DoH (28) , un vector de error de control del monitor eNOX e2 (13) con el generador de error de la ANG (29) , y un vector de error de control del monitor eNMB e3 (14) con el generador de error de la RMX (30) , cada uno con sus componentes proporcional, integral y derivativa (12.1, 12.2, 12.3) , (13.1, 13.2, 13.3) y (14.1, 14.2, 14.3) . Los errores correspondientes desde e4 a er son los relativos a los nuevos monitores incorporados al sistema de control, e1 [ep1 e j 1 e F1 ]T [4. 1] el 2 eF 2 ] er [e Pi eír e» ]T Donde eP¡ se refiere al error asimétrico proporcional del PID; e¡¡ se refiere al error simétrico integral del PID; eF¡ se refiere al error derivativo filtrado del PID; y ¡ se refiere a un número entero comprendido entre 1 y r, para referenciar a la variable monitorizada. 4.2.- Calcular los errores asimétrico proporcional, simétrico integral y asimétrico derivativo de cada controlador SISO-PID, utilizando el vector yf de variables filtradas de monitorización (10) y el vector yT de objetivos de las variables monitorizadas (8) , Donde yT es el vector de objetivos de las variables monitorizadas (8) ; yf es el vector de variables filtradas de monitorización (10) ; I es la matriz identidad; Td es el vector de tiempos de acción derivativa directo y N es el coeficiente de filtrado PID. 4.2.1.-[B] es la matriz con la influencia del "weighting set point en la acción proporcional de los PIDs, se conoce también como la asimetría en el error proporcional, Donde f3¡¡ es el peso sobre el target de la acción proporcional j, [4. 4] Donde ythb es un vector de umbrales que determinan el valor máximo de p. 4.2.2.- G es la matriz con la influencia del "weighting set point en la acción derivativa de los PIDs; se conoce también como la asimetría en el error derivativo, Donde y¡¡ es el peso sobre el target de la acción derivativa j, [4. 6] Donde ythg es un vector de umbrales que determinan el valor máximo de y. 4.3.- Calcular el vector de error de control del monitor eBIS (12) mediante un generador de error de la DoH (28) a partir de la monitorización filtrada de la DoH mediante el monitor eBIS (10.1) y de su valor objetivo (8.1) , [4. 7] 4.4.- Calcular el error de control del monitor eNOX (13) mediante un generador de error de la ANG (29) a partir de la monitorización filtrada de la ANG mediante el monitor eNOX (10.2) y de su valor objetivo (8.2) , [4. 8] 4.5.- Calcular el vector de error de control del monitor eNMB (14) mediante un generador de error de la MRX (30) a partir de la monitorización filtrada de la RMX mediante el monitor eNMB (10.3) y de su valor objetivo (8.3) , [4. 9] El paso 5) ejecutado por el sistema de control SynPlD adicionalmente comprende un controlador multivariable y con sinergia MIMO-PID (16) para: 5.1.- Definir el vector de perfusiones de control (15) , [5' 1] Donde u1 es la perfusión de control del ePPF (15.1) ; u2 es la perfusión de control del eRMF (15.2) ; u3 es la perfusión de control del eRCN (15.3) y desde u4 a us las perfusiones de los nuevos fármacos que puedan incorporarse al sistema de control. 5.2.- Calcular el vector de perfusiones de control (15) mediante un controlador multivariable y con sinergia MIMO-PID (16) , los vectores de error de control de los monitores eBIS (12) , eNOX (13) y eNMB (14) y el vector de perfusiones del protocolo manual (4) , Up¡d = [ H D ]{S Y N ]+ K ol-uol, [5- 2] Donde: 5.2.1.- [PID] es la matriz de controladores SISO-PID que componen el controlador multivariable y con sinergia MIMO-PID (16) , Donde C¡¡ es el controlador SISO-PID relativo al monitor j y al fármaco /; Ci es el subsistema de control MISO-PID-ePPF; C2 es el subsistema de control MISO-PID-eRMF; y C3 es el subsistema de control MISO-PID-eNMB. Los C¡j están definidos por la matriz de ganancias proporcionales [KP]; la matriz de ganancias integrales [K|] y la matriz de ganancias derivativas [KD]: K p = diag ( [K p ]) [5. 7] K j = diag ( [K j ]) [5. 8] K D = diag ([K D ]) [5. 9] Donde KP¡¡ es la ganancia proporcional relativa monitor j y al fármaco /; K\¡¡ es la ganancia integral relativa monitor j y al fármaco /; y KD¡¡ es la ganancia derivativa relativa monitor j y al fármaco /; KPi es el vector de ganancias proporcionales relativas al fármaco /; KIi es el vector de ganancias integrales relativas al fármaco /; KDi es el vector de ganancias derivativas relativas al fármaco /; KP es el vector de ganancias proporcionales directas relativas al fármaco j y al monitor j; KI es el vector de ganancias integrales directas relativas al fármaco j y l monitor j; y KD es el vector de ganancias derivativas directas relativas al fármaco j y al monitor _/'. 5.2.2.-[SYN] es la matriz de sinergia de fármacos: Donde S, y es la sinergia relativa al controlador Q; S¡ es el vector de sinergias relativa al fármaco /. 5.2.3.- Koi es un vector de ganancias sobre el vector de perfusiones del protocolo manual (4) , [5. 11] Donde K0/1 es la ganancia que modula la perfusión del protocolo manual del ePPF (4.1) ; K0/2 es la ganancia que modula la perfusión del protocolo manual del eRMF (4.2) ; K0/3 es la ganancia que modula la perfusión del protocolo manual del eRCN (4.3) y desde Ka/4 a Ka/S son las ganancias que modulan las perfusiones del protocolo manual de los nuevos fármacos que puedan incorporarse al sistema de control; Donde yT es el vector de objetivos de las variables monitorizadas (8) ; yf es el vector de variables filtradas de monitorización (10) e yLO es el vector de umbrales inferiores de activación de la corrección. 5.3.- Definir los subsistemas de control MISO-PID (25, 26, 27) a partir de los vectores de los errores de control (12, 13, 14) y del vector de perfusiones del protocolo manual (4) , -| 3] Donde C¡¡ es el controlador PID relativo al monitor ¡ y al fármaco /; S¡¡ es la sinergia relativa al controlador C¡¡; y K0u es la ganancia aplicada a las perfusiones del protocolo manual del fármaco u0/i. 5.3.1.- Definir cada controlador SISO-PID (25.1....... 27.3) mediante los vectores de los errores de control (12, 13, 14) y las ganancias definidas en el paso 5.2.1, C = P + 1.. + D.. [5. 14] y y y y Donde / identifica el fármaco (15.i) y ¡ identifica el monitor (10.j) ; P¡¡ es la acción proporcional, l¡¡ es la acción integral y D¡¡ es la acción derivativa. 5.3.2.- Calcular la acción proporcional, integral y derivativa; P y ~ K Pij 'e Pj íy = K n j\e, jdT, [5. 15] deFj D = K Dy di Donde KP¡¡ es la ganancia proporcional asociada al medicamento / y al monitor¡; eP¡ el error proporcional relativo al monitor¡; K¡¡ la ganancia integral asociada al medicamento / y al monitor; e¡ el error integral relativo al monitor ¡; Kd¡¡ la ganancia derivativa asociada al medicamento / y al monitor; y eF¡ el error derivativo filtrado relativo al monitor ¡. El paso 6) ejecutado por el sistema de control SynPlD adicionalmente comprende un sistema corrector de perfusiones (17) para: 6.1.- Definir el vector de corrección (18) , ucr = \ Lu cr , 1 u cr .2 ... u crs 1 JT, [6-1] Donde ucr1 es la perfusión correctora del fármaco ePPF (18.1) ; ucr2 es la perfusión correctora del fármaco eRMF (18.2) ; ucr3 es la perfusión correctora del fármaco eRCN (18.3) ; y el resto de componentes del vector desde ucr4 a ucrs son otras posibles correcciones de otros fármacos incorporados al sistema. 6.2.- Calcular el vector de corrección (18) a partir del vector de variables filtradas de monitorización (10) , Donde [KP] es la matriz de ganancias proporcionales, ecuación [5. 4]; [SYN] es la matriz de sinergia, ecuación [5. 10]; yf es el vector de variables filtradas de monitorización (10) . 6.2.1.- yHi es el vector de umbrales superiores de activación de la corrección, H 2 ... H r f [6.3] Donde H1 es el umbral superior relativo al monitor eBIS; H2 es el umbral superior relativo al monitor eNOX; H3 es el umbral superior relativo al monitor eNMB; y el resto de componentes de los vectores desde H4 hasta Hr son los umbrales superiores de otras posibles incorporaciones de monitores al sistema. 6.2.2.- yLO es el vector de umbrales inferiores de activación de la corrección, y lo = [A h ... l , ] 1 I6- 4! Donde L1 es el umbral inferior relativo al monitor eBIS; L2 es el umbral inferior relativo al monitor eNOX; L3 es el umbral inferior relativo al monitor eNMB; y el resto de componentes de los vectores desde L4 hasta Lr son los umbrales inferiores de otras posibles incorporaciones de monitores al sistema. El paso 7) del sistema de control SynPlD adicionalmente comprende de un sistema de seguridad (19) para: 7.1.- Definir el vector de control fiable (20) , Donde usf1 es la perfusión fiable del fármaco ePPF (20.1) ; usf2 es la perfusión fiable del fármaco eRMF (20.2) ; usf3 es la perfusión fiable del fármaco eRCN (20.3) ; y el resto de componentes del vector desde usf4 a usfs son otras posibles perfusiones fiables de otros fármacos incorporados al sistema. 7.2.- Calcular el vector de control fiable (20) a partir del vector de perfusiones de control (15) y del vector de corrección (18) , UHI Upid + Ucr ^ UHI u u pid ^ U cr ? U LO < U pid + U cr ^ U H1 [1] [7.2] ULO Upid + Ucr ^ ULO Donde ucr es el vector de corrección (18) y up¡d es el vector de perfusiones de control (15) . 7.2.1.- uHi es el vector de límites superiores de la perfusión de fármacos, Donde uH1 es límite superior de la perfusión relativa al fármaco ePPF; uH 2 e límite superior de la perfusión relativa al fármaco eRMF; uH3 es límite superior de la perfusión relativa al fármaco eRCN; y el resto de componentes de los vectores desde uH4 hasta uHs son los límites superiores de las perfusiones relativas a otras posibles incorporaciones de fármacos al sistema. 7.2.2.- Ulo es el vector de límites inferiores de la perfusión de fármacos, Donde uL1 es el límite inferior de la perfusión relativa al fármaco ePPF; uL2 es el límite inferior de la perfusión relativa al fármaco eRMF; uL3 es el límite inferior de la perfusión relativa al fármaco eRCN; y el resto de componentes de los vectores desde uL4 hasta uLs son los límites inferiores de las perfusiones relativas a otras posibles incorporaciones de fármacos al sistema. El paso 8) ejecutado por el sistema de control SynPiD adicionalmente comprende un sistema cuantificador (21) para: 8.1.- Definir el vector de perfusiones automáticas (22) , Ucl=k/1 Ucl2 ••• UclS Í> [8' 1] Donde uc11 es la perfusión automática del fármaco ePPF (22.1) ; uc2 es la perfusión automática del fármaco eRMF (22.2) ; uc3 es la perfusión automática del fármaco eRCN (22.3) ; y el resto de componentes del vector desde uc4 a ucs son otras posibles perfusiones automáticas en CL de otros fármacos incorporados al sistema. 8.2.- Calcular el vector de perfusiones automáticas (22) a partir del vector de control fiable (20) , ucl = round f « » f ^ u [8. 2] V Umn y Donde usf es el vector de control fiable (20) y umn es el vector de resoluciones del sistema de bombas de perfusión continua (2) ; 8.2.1.- umin es el vector de resoluciones de cada bomba de perfusión de fármacos; Donde umn1 es resolución bomba de perfusión ePPF; umn2 es resolución bomba de perfusión eRMF; umn3 es la resolución bomba de perfusión eRCN; y el resto de componentes del vector desde umn4 a umns son las resoluciones de otras posibles bombas de perfusión de nuevos fármacos incorporados al sistema de control. El paso 9) ejecutado por el sistema de control SynPlD adicionalmente comprende un sistema de conmutación (23) para: 9.1.- Definir el vector de perfusión de fármacos anestésicos (5) , Donde uptí es la perfusión del fármaco ePPF (5.1) ; upt2 es la perfusión continua del fármaco eRMF (5.2) ; upt3 es la perfusión del fármaco eRCN (5.3) ; y el resto de componentes del vector desde upt4 a upts son otras posibles perfusiones de nuevos fármacos incorporados al sistema de control. 9.2.- Calcular el vector de perfusión de fármacos anestésicos (5) a partir del vector de perfusiones del protocolo manual (4) y el vector de perfusiones automáticas (22) , Donde uo es el vector de perfusiones del protocolo manual (4) ; ud es el vector de perfusiones automáticas (22) ; t¡ es el tiempo de inicio de la lPh; tm es el tiempo de inicio de la MPh; y tr es el tiempo de comienzo de la RPh. El paso 10) ejecutado por el sistema de control SynPlD adicionalmente comprende de un subsistema de control MlSO-PlD-ePPF (25) para: 10.1.- Definir el subsistema de control MlSO-PlD-ePPF (25) como un conjunto de controladores 10.2.- Calcular la perfusión de control del ePPF (15.1) ; a partir de los controladores SlSO-PlD (25.1, 25, .2, 25.3) , de los vectores de los errores de control (12, 13, 14) y de la perfusión de ePPF del protocolo manual (4.1) , u i Ci ^ i + K 0i i 'U0ii [10. ul Cu mSl ¡ + C12 'Sl2 + • • • + Clr -Slr + K oñ uoll 2] Donde Si es un vector formado por la primera fila de [SYN]; Cy es el controlador PlD relativo al monitor ¡ y al fármaco ePPF; Sy es un vector formado por la sinergia relativa al controlador Cy; y Koy es la ganancia aplicada a la perfusión del protocolo manual del ePPF. El paso 11) ejecutado por el sistema de control SynPlD adicionalmente comprende de un subsistema de control MlSO-PlD-eRMF (26) para: 11.1.- Definir el subsistema de control MlSO-PlD-eRMF (26) como un conjunto de controladores 11.2.- Calcular la perfusión de control del eRMF (15.2) ; a partir de los controladores SlSO-PlD (26.1, 26, .2, 26.3) , de los vectores de los errores de control (12, 13, 14) y de la perfusión de eRMF del protocolo manual (4.2) , Donde S2 es un vector formado por la segunda fila de [SYN]; C2¡ es el controlador PlD relativo al monitor j y al fármaco eRMF; S2y es un vector formado por la sinergia relativa al controlador C2¡; y K02 es la ganancia aplicada a la perfusión del protocolo manual del eRMF. El paso 12) ejecutado por el sistema de control SynPlD adicionalmente comprende de un subsistema de control MlSO-PlD-eNMB (27) para: 10.1.- Definir el subsistema de control MlSO-PlD-eNMB (27) como un conjunto de controladores SlSO-PlD, 12.2.- Calcular la perfusión de control del eRCN (15.3) ; a partir de los controladores SISO-PID (27.1, 27, .2, 27.3) , de los vectores de los errores de control (12, 13, 14) y de la perfusión de eRCN del protocolo manual (4.3) , U3 C3 '83 + K 0¡ 3 'Uol 3 [12.2] u3 = C31 ~S3l + C32 'S32 + ... + C3.- S3r + K 0¡3 nol3 Donde S3 es un vector formado por la tercera fila de [SYN]; C3¡ es el controlador PID relativo al monitor j y al fármaco eRCN; S3¡ es la sinergia relativa al controlador C3; y K03 es la ganancia aplicada a la perfusión del protocolo manual del eRCN. El paso 13) ejecutado por el sistema de control SynPlD adicionalmente puede comprender de varios controladores MISO-PID para nuevos fármacos: 13.1.- Definir el controlador MISO-PID para el fármaco i como un conjunto de controladores SISO-PID, Donde i=4...s, identifica los nuevos fármacos; y r identifica el número de monitores. 13.2.- Calcular la perfusión de control del fármaco i; a partir de los controladores SISO-PID, de los errores de control y de la perfusión del fármaco i del protocolo manual (4.i) , [13.2 ] U C 8 + K iliU, En otro aspecto de la invención, se divulga un dispositivo de multi-perfusión de fármacos anestésicos con sinergia mediante control en CL MIMO-PID (SynPID) aplicado en actos anestésicos vía IV, este método es multidimensional configurable a la cantidad de fármacos utilizados y a la cantidad de variables de monitorización que se utilicen, en una cualquiera de las realizaciones del primer aspecto de la invención. El dispositivo de multi-perfusión de fármacos anestésicos con sinergia mediante control en CL MIMO-PID (SynPID) aplicado en actos anestésicos vía IV comprende al menos un banco de filtros (9) ; un generador de errores de control (11) ; un controlador multivariable y con sinergia MIMO-PID (16) ; un sistema corrector de perfusiones (17) ; un sistema de seguridad (19) ; un sistema cuantificador (21) ; y un sistema de conmutación (23) . El dispositivo de multi-perfusión de fármacos anestésicos con sinergia mediante control en CL MIMO-PID (SynPlD) aplicado en actos anestésicos vía IV puede ser un dispositivo electrónico o electromecánico. BREVE DESCRIPCIÓN DE LOS DIBUJOS Figura 1.- Muestra la topología del sistema de control SynPlD (24) en su forma más general en la que se detalla el paciente (1) , al que se le suministra el vector de perfusión de fármacos anestésicos (5) a través de un sistema de bombas de perfusión (2) y del que se extraen las medidas del vector de variables de monitorización (6) a través de los equipos de monitorización (3) . Las bombas de perfusión controlan los fármacos ePPF (2.1) , eRMF (2.2) y eRCN (2.3) . Los equipos de monitorización (3) recogen información de las siguientes variables: 1) DoH (3.1) mediante el monitor eBIS (6.1) ; 2) ANG (3.2) mediante el monitor eNOX (6.2) ; y 3) MRX (3.3) mediante el monitor eNMB (6.3) . El vector de variables de monitorización (6) es la base de realimentación del sistema de control SynPlD (24) , que además utiliza la información sobre: 1) el vector de objetivos de las variables monitorizadas (8) : target del eBIS (8.1) , target del eNOX (8.2) y target del eNMB (8.3) ; y 2) el vector de perfusiones del protocolo manual (4) : protocolo manual del ePPF (4.1) , protocolo manual del eRMF (4.2) y protocolo manual del eRCN (4.3) . Figura 2.- Muestra un detalle pormenorizado del sistema de control SynPID (24) que presenta como entradas los vectores de: 1) el vector de perfusiones del protocolo manual (4) ; 2) el vector de objetivos de las variables monitorizadas (8) ; y 3) los valores del vector de variables de monitorización (6) . El sistema de control SynPID (24) está compuesto por: 1) un banco de filtros (9) para obtener un vector de variables filtradas de monitorización (10) a partir del vector de variables de monitorización (6) ; el banco de filtros (9) está compuesto por tres filtros uno para limpiar y filtrar el eBIS (9.1) , otro para limpiar y filtrar el eNOX (9.2) y otro para limpiar y filtrar el eNMB (9.3) ; 2) un generador de errores de control (11) para obtener los vectores de los errores de control (12, 13, 14) a partir del vector de variables filtradas de monitorización (10) y del vector de objetivos de las variables monitorizadas (8) ; particularmente consiste en obtener el vector de error de control del monitor eBIS (12) ; obtener el vector de error de control del monitor eNOX (13) y obtener el vector de error de control del monitor eNMB (14) ; 3) un controlador multivariable y con sinergia MIMO-PID (16) para obtener un vector de perfusiones de control (15) a partir de los vectores de los errores de control (12, 13, 14) y del vector de perfusiones del protocolo manual (4) ; 4) un sistema corrector de perfusiones (17) para obtener un vector de corrección (18) a partir del vector de variables filtradas de onitorización (10) ; 5) un sistema de seguridad (19) obtener un vector de control fiable (20) a partir del vector de perfusiones de control (15) y del vector de corrección (18) ; 6) un cuantificador (21) para obtener un vector de perfusiones automáticas (22) a partir del vector de control fiable (20) ; y 7) un sistema de conmutación (23) para obtener el vector de perfusión de fármacos anestésicos (5) a partir del vector de perfusiones del protocolo manual (4) y del vector de perfusiones automáticas (22) . Figura 3.- Muestra un detalle pormenorizado del generador de errores de control (11) que presenta como entradas los vectores de: 1) el vector de objetivos de las variables monitorizadas (8) ; y 2) el vector de variables filtradas de monitorización (10) . El generador de errores de control (11) está compuesto por: 1) un generador de error de la DoH (28) donde se obtiene el vector de error de control del monitor eBIS (12) , donde se explicitan el error proporcional eBIS (12.1) , el error integral eBIS (12.2) y el error derivativo eBIS (12.3) , a partir de la monitorización filtrada de la DoH mediante el monitor eBIS (10.1) y de su valor objetivo (8.1) ; 2) un generador de error de la ANG (29) donde se obtiene el vector de error de control del monitor eNOX (13) , donde se explicitan el error proporcional eNOX (13.1) , el error integral eNOX (13.2) y el error derivativo eNOX (13.3) , a partir de la monitorización filtrada de la ANG mediante el monitor eNOX (10.2) y de su valor objetivo (8.2) ; y 3) un generador de error de la MRX (30) donde se obtiene el vector de error de control del monitor eNMB (14) , donde se explicitan el error proporcional eNMB (14.1) , el error integral eNMB (14.2) y el error derivativo eNMB (14.3) , a partir de la monitorización filtrada de la MRX mediante el monitor eNMB (10.3) y de su valor objetivo (8.3) . Figura 4.- Muestra un detalle pormenorizado del controlador multivariable y con sinergia MIMO-PID (16) que presentan como entradas los vectores de los errores de control (12, 13, 14) y del vector de perfusiones del protocolo manual (4) . El controlador multivariable y con sinergia MIMO-PID (16) está compuesto por varios subsistemas de control MISO-PID (25, 26, 27) que relacionan los vectores de los errores de control (12, 13, 14) con el vector de perfusiones de control (15) . Figura 5.- Muestra un detalle pormenorizado del controlador MISO-PID (25) relacionado con la perfusión del fármaco ePPF (15.1) que presenta como entradas los vectores de los errores de control (12, 13, 14) . El subsistema de control MISO-PID-ePPF (25) está compuesto por tres controladores SISO-PID que relacionan la perfusión del fármaco ePPF con: 1) el vector del error de control relativo al eBIS (12) mediante un controlador PID eBIS-ePPF (25.1) ; 2) el vector del error de control relativo al eNOX (13) mediante un controlador PID eNOX-ePPF (25.2) ; y 3) el vector del error de control relativo al eNMB (14) mediante un controlador PID eNMB-ePPF (25.3) . Figura 6.- Muestra un detalle pormenorizado del subsistema de control MISO-PID-eRMF (26) relacionado con la perfusión del fármaco eRMF (15.2) que presenta como entradas los vectores de los errores de control (12, 13, 14) . El subsistema de control MISO-PID-eRMF (26) está compuesto por tres controladores SISO-PID que relacionan la perfusión del fármaco eRMF con: 1) el vector del error de control relativo al eBIS (12) mediante un controlador PID eBIS-eRMF (26.1) ; 2) el vector del error de control relativo al eNOX (13) mediante un controlador PID eNOX-eRMF (26.2) ; y 3) el vector del error de control relativo al eNMB (14) mediante un controlador PID eNMB-ePPF (26.3) . Figura 7.- Muestra un detalle pormenorizado del subsistema de control MISO-PID-eNMB (27) relacionado con la perfusión del fármaco eRCN (15.3) que presenta como entradas los vectores de los errores de control (12, 13, 14) . El subsistema de control MISO-PID-eNMB (27) está compuesto por tres controladores SISO-PID que relacionan la perfusión del fármaco eRCN con: 1) el vector del error de control relativo al eBIS (12) mediante un controlador PID eBIS-eRCN (27.1) ; 2) el vector del error de control relativo al eNOX (13) mediante un controlador PID eNOX-eRCN (27.2) ; y 3) el vector del error de control relativo al eNMB (14) mediante un controlador PID eNMB-eRCN (27.3) . Figura 8.- Muestra un detalle pormenorizado de uno de los 9 controladores SISO-PID (C¡j) que componen el sistema de control SynPID (24) , cada controlador SISO-PID presenta como entradas los correspondientes errores proporcional (k.1) , integral (k.2 ) y derivativo (k.3) , relativo a cada componente de cada vector de error de control (ey) . Cada controlador SISO-PID se identifica con los subíndices ¡ que identifica el fármaco al que se está calculado la perfusión parcial, y j que identifica la procedencia del monitor. Así ¡'=1 identifica el PPF, ¡=2 el RMF e ¡=3 el RCN, j'=1 identifica el monitor BIS, j=2 el NOX y j'=3 el NMB, k=12 identifica el vector de error relativo al monitor BIS, k=13 el relativo al NOX y k=14 al NMB. DESCRIPCIÓN DETALLADA DE LA INVENCIÓN La presente invención aporta a la técnica varias estrategias de complemento al controlador PID en CL para que sea efectivo en el control en CL de la inducción y mantenimiento de la anestesia general, calculando la dosis de los fármacos ePPF, eRMF y eRCN en base a un vector de errores de control. El control en CL es obtenido de forma novedosa por la consideración de la sinergia de los fármacos en el acto anestésico y por la realimentación de la información de monitorización de la DoH, ANG y MRX (otras variables pueden ser consideradas) mediante los monitores eBIS, eNOX y eNMB respectivamente (otros monitores pueden ser considerados) . Los cambios en los valores de los monitores son originados principalmente por el efecto de los fármacos y las actuaciones de la cirugía. Además, las perfusiones de los fármacos están condicionadas por un sistema de seguridad para salvaguardar la integridad física del paciente y están complementadas por un sistema de corrección de perfusiones que el PID clásico no posee. Presenta entre sus novedades la consideración de la sinergia entre los fármacos en un multicontrolador PID, asimetría en los errores de control, corrección de la perfusión por niveles excepcionalmente bajos o altos en los monitores, seguridad ante la sobreperfusión mediante limites fijos o variables de la perfusión de fármacos y mediante suspensión de las bombas, seguridad ante infraperfusión por condicionantes relacionados con la experiencia manual del anestesiólogo (protocolo manual OL) . Finalmente, la decisión final sobre las perfusiones se condiciona con un cuantificador para adecuar las perfusiones a las resoluciones de las bombas electromecánicas de perfusión. El objetivo final es realizar un cálculo automático de las perfusiones de ePPF, eRMF y eRCN que se aplicaría directamente a un paciente bajo cirugía con anestesia general, que sería el usuario final de la presente invención. La invención que se propone tiene entre sus novedades la definición de un nuevo sistema de perfusión de fármacos anestésicos con un sistema de control SynPlD, formado por un banco de filtros, un generador de errores asimétricos de control, un controlador MIMO-PID, un sistema de corrección, un sistema de seguridad y un sistema de cuantificación que pueda aplicarse al paciente bajo cirugía, pues tiene en cuenta: 1) la monitorización de la DoH, ANG y MRX mediante monitores eBIS, eNOX y eNMB; 2) las bombas de perfusión de los fármacos ePPF, eRMF y eRCN; y 3) el uso de un dispositivo electrónico que utilice un microprocesador y una memoria de almacenamiento. Adicionalmente, para estimar las perfusiones automáticas sobre el paciente el sistema de control en CL considera las perfusiones de fármacos previas en el momento de actuación y considera las medidas sobre los monitores actuales y pasadas. El sistema de perfusión continua de fármacos ePPF, eRMF y eRCN con sistema de control SynPlD es un método de control que requiere de la experiencia manual del anestesiólogo (protocolo manual OL) y está personalizado para cada paciente utilizando una variante del método empírico de ajuste de Cohen-Coon a través de las ganancias proporcional, integral y derivativa de cada controlador SISO-PID, del peso del paciente (W) , de su altura (H) , de su sexo (G) y de su masa muscular (MB) . El método de personalización se aplica durante la IPh de la anestesia general. El sistema de control SynPlD (24) propone el vector de perfusión de fármacos anestésicos (5) , como resultado de la aplicación del sistema de conmutación (23) , que inicialmente aplica el vector de perfusiones del protocolo manual (4) en la IPh, para conmutar al vector de perfusiones automáticas (22) en MPh y anular la perfusión en RPh. El sistema de control SynPlD (24) tiene como objetivo principal conducir al paciente (1) a un estado anestésico satisfactorio y fiable en función de: 1) el estado anestésico actual; 2) el vector de variables de monitorización (6) actual y/o pasados (histórico almacenado en la memoria) ; y 3) el vector de perfusión de fármacos anestésicos (5) de instantes pasados (histórico almacenado en la memoria) . La invención consiste en la propuesta de un sistema electrónico en el se ejecute un algoritmo de control realimentado definido por un sistema de control SynPlD (24) basado en un controlador multivariable y con sinergia MIMO-PID (16) que define el sistema de control multivariable para realizar el control de un estado anestésico fiable en pacientes (1) sometidos a cirugía bajo anestesia general. El sistema de control SynPID se implementa en un sistema basado en microprocesador con memoria seleccionado entre: "smartphones", "tablets", ordenadores personales, arduino, raspberr y -PI y un hardware específico para la ejecución del método o emplear el hardware propio de las bombas de perfusión para ejecutar la secuencia de instrucciones que implementarían el método de perfusión de fármacos en un sistema de control SynPID descrito en la presente invención. El sistema de perfusión de fármacos con sinergia mediante control en CL MIMO-PID (SynPID) aplicado en actos anestésicos vía IV de la presente invención difiere de los métodos del estado de la técnica basados en PIDs clásicos en al menos los siguientes aspectos: - El sistema de control SynPID utiliza tres fases de control controladas por el sistema de conmutación (23) : 1) IPh, eta fase correspondiente al inicio del acto nestésico y dura hasta conseguir un estado anestésico satisfactorio, durante este periodo solo el vector de perfusiones del protocolo manual (4) está aplicado al paciente (1) , el final de este periodo se utiliza para la personalización del sistema de control SynPlD (24) al paciente (1) ; 2) MPh, en esta fase es donde ocurre la cirugía y el objetivo del sistema de control SynPlD es mantener el estado anestésico satisfactorio, a pesar de los actos quirúrgicos; y 3) RPh, en esta fase se retiran las perfusiones de los fármacos para conseguir reanimar al paciente. - El sistema de control SynPlD utiliza un banco de filtros (9) para eliminar el ruido y los artefactos del vector de variables de monitorización (6) y obtener el vector de monitorización filtrado. El banco de filtros (9) está basado en una limpieza espectral y en la toma de decisiones en función de unas condiciones de monitorización. - El sistema de control SynPlD utiliza un generador de errores de control (11) relativos a los monitores eBIS, eNOX y eNMB que componen el vector de variables de monitorización (6) , los errores son asimétricos y están definidos por una modulación del vector de objetivos de las variables monitorizadas (8) y el vector de variables filtradas de monitorización (10) . El vector de actuaciones quirúrgicas (7) se reflejan en el paciente (1) a través de variaciones en el vector de variables de monitorización (6) . - El sistema de control SynPlD utiliza un vector de perfusiones de control (15) formado por perfusiones de los fármacos ePPF (15.1) , eRMF (15.2) y eRCN (15.3) . Cada perfusión de fármacos está definida por la acción de un sistema de control MlSO-PlD compuesta por la suma de tres acciones de control relativas a tres controladores SlSO-PlD. - La perfusión de ePPF (15.1) se calcula mediante la suma de: 1) un controlador SlSO-PlD (25.1) que relaciona una parte de la perfusión de control del ePPF con el vector de error de control del monitor eBlS (12) , formado por una componente proporcional (12.1) , una componente integral (12.2) y una componente derivativa (12.3) ; 2) un controlador SlSO-PlD (25.2) que relaciona una parte de la perfusión de control del ePPF con el vector de error de control del monitor eNOX (13) , formado por una componente proporcional (13.1) , una componente integral (13.2) y na componente derivativa (13.3) ; y 3) un controlador SISO-PID (25.3) que relaciona una parte de la perfusión de control del ePPF con el vector de error de control del monitor eNMB (14) , formado por una componente proporcional (14.1) , una componente integral (14.2) y una componente derivativa (14.3) ; - La perfusión de eRMF (15.2) se calcula mediante la suma de: 1) un controlador SISO-PID (26.1) que relaciona una parte de la perfusión de control del eRMF con el vector de error de control del monitor eBIS (12) , formado por una componente proporcional (12.1) , una componente integral (12.2) y una componente derivativa (12.3) ; 2) un controlador SISO-PID (26.2) que relaciona una parte de la perfusión de control del eRMF con el vector de error de control del monitor eNOX (13) , formado por una componente proporcional (13.1) , una componente integral (13.2) y una componente derivativa (13.3) ; y 3) un controlador SISO-PID (26.3) que relaciona una parte de la perfusión de control del eRMF con el vector de error de control del monitor eNMB (14) , formado por una componente proporcional (14.1) , una componente integral (14.2) y una componente derivativa (14.3) ; - La perfusión de eRCN (15.3) se calcula mediante la suma de: 1) un controlador SISO-PID (27.1) que relaciona una parte de la perfusión de control del eRCN con el vector del error de control del monitor eBIS (12) , formado por una componente proporcional (12.1) , una componente integral (12.2) y una componente derivativa (12.3) ; 2) un controlador SISO-PID (27.2) que relaciona una parte de la perfusión de control del eRCN con el vector de error de control del monitor eNOX (13) , formado por una componente proporcional (13.1) , una componente integral (13.2) y una componente derivativa (13.3) ; y 3) un controlador SISO-PID (27.3) que relaciona una parte de la perfusión de control del eRCN con el vector de error de control del monitor eNMB (14) , formado por una componente proporcional (14.1) , una componente integral (14.2) y una componente derivativa (14.3) ; - El sistema de control SynPlD (24) utiliza 9 controladores SISO-PID, agrupados en tres subsistemas de control MISO-PID (figuras 5, 6 y 7) , cada controlador SISO-PID (C¡j ) (figura 8 ) utiliza para calcular la perfusión del fármaco i (15.i) : - Un sistema de acción proporcional (i.j.1) que define a su salida la acción de perfusión proporcional (15.i.1) , a partir de su entrada que es el error asimétrico proporcional de control (fr.1) . - Un sistema de acción integral (i.j.2) que define a su salida la acción de perfusión integral (15.i.2) , a partir de su entrada que es el error simétrico integral de control ( .^2 ) . - Un sistema de acción derivativa (/'._/'.3) que define a su salida la acción de perfusión derivativa (15.i.3) , a partir de su entrada que es el error asimétrico derivativo de control ( .^3) . - El sistema de control SynPID (24) utiliza un sistema corrector de perfusiones (17) , que compensa el vector de perfusiones de control (15) con el vector de corrección (18) que están definidas por las desviaciones del vector de variables filtradas de monitorización (10 ) respecto de unos vectores de umbrales superior e inferior. Estas desviaciones consideradas no han podido ser corregidas por el control multivariable basado en PIDs (24) . - El sistema de control SynPID (24) utiliza un sistema de seguridad (19) , que condiciona el vector de perfusiones de control (15) compensado por el vector de corrección (18) para conducir al vector de control fiable (20 ) , lo que evita la sobreperfusión e infraperfusión, con ello se consigue evitar periodos de anestesia general profunda que compromete la vida del paciente o periodos de sedación lo que puede ocasionar despertares intraoperatorios. Para evitar la sobreperfusión se aplican las restricciones con el sistema de seguridad (19) para suspender el sistema de bombas de perfusión (2 ) y para evitar la infraperfusión se aplica el vector de corrección (18) . - El sistema de control SynPID (24) utiliza un sistema cuantificador (21) para que el vector de control fiable (20 ) sea interpretable por el sistema de bombas de perfusión (2) , que a través de varios catéteres infunden los fármacos vía IV dentro del cuerpo del paciente (1) que modificará su estado anestésico y que posteriormente, esas modificaciones serán recogidas por los equipos de monitorización (3) mediante el vector de variables de monitorización (6) . Los pasos para la multi-perfusión de fármacos anestésicos con sinergia mediante control en CL MIMO-PID (SynPlD) aplicado en actos anestésicos vía IV para la perfusión automática, ejecutables en un dispositivo electrónico, son los siguientes para cada momento de actuación: Paso 1: Medir el valor del vector de los monitores eBIS (6.1) , eNOX (6.2) y eNMB (6.3) que depende principalmente del vector de perfusión de los fármacos anestésicos ePPF (5.1) , eRMF (5.2) y eRCN (5.3) . Los fármacos anestésicos se administran al paciente (1) mediante un sistema de bombas de perfusión (2) . Los equipos de monitorización (3) recogen sobre el paciente los efectos de los fármacos anestésicos y del vector de actuaciones quirúrgicas (7) del médico cirujano en una intervención a través del vector de variables de monitorización (6) ; también otros factores pueden influir en el valor del vector de monitorización; la información del vector de variables de monitorización (6) y la decisión tomada sobre el valor del vector de perfusión de fármacos anestésicos (5) se almacena en una memoria; Paso 2: Calcular el vector de perfusión de los fármacos anestésicos ePPF (5.1) , eRMF (5.2) y eRCN (5.3) mediante un sistema de control SynPlD (24) a partir de la realimentación del valor del vector de los monitores eBIS (6.1) , eNOX (6.2) y eNMB (6.3) , del vector de perfusiones del protocolo manual relativas al ePPF (4.1) , al eRMF (4.2) y al eRCN (4.3) y del vector de los valores objetivo de variables monitorizadas relativas al eBIS (8.1) , al eNOX (8.2) y al eNMB (8.3) ; Paso 3: Proceder a la limpieza de ruido y artefactos del vector de los monitores eBIS (6.1) , eNOX (6.2) y eNMB (6.3) , mediante un sistema de limpieza y filtrado para el eBIS (9.1) , un sistema de limpieza y filtrado para el eNOX (9.2) y un sistema de limpieza y filtrado para el eNMB (9.3) , para obtener un vector de variables de monitorización filtrada del eBIS (10.1) , eNOX (10.2) y eNMB (10.3) ; Paso4: Calcular unos vectores de errores de control de los monitores al eBIS (12) , eNOX (13) y al eNMB (14) . El vector de error de control eBIS tiene tres omponentes un error asimétrico proporcional eBIS (12.1) , un error simétrico integral eBIS (12.2) y un error asimétrico derivativo eBIS (12.3) . El vector de error de control eNOX tiene tres componentes un error asimétrico proporcional eNOX (13.1) , un error simétrico integral eNOX (13.2) y un error asimétrico derivativo eNOX (13.3) . El vector de error de control eNMB tiene tres componentes un error asimétrico proporcional eNMB (14.1) , un error simétrico integral eNMB (14.2) y un error asimétrico derivativo eNMB (14.3) . Los vectores de los errores de control (12, 13, 14) se obtienen mediante un generador de errores de control (11) compuesto por un generador de error de la DoH (28) , un generador de error de la ANG (29) y un generador de error de la MRX (30) . El generador de error de la DoH (28) obtiene las tres componentes de error asimétrico proporcional eBIS (12.1) , simétrico integral eBIS (12.2) y asimétrico derivativo eBIS (12.3) a partir de la variable de monitorización filtrada del eBIS (10.1) y del valor objetivo del eBIS (8.1) . El generador de error de la ANG (29) obtiene las tres componentes de error asimétrico proporcional eNOX (13.1) , simétrico integral eNOX (13.2) y asimétrico derivativo eNOX (13.3) a partir de la variable de monitorización filtrada del eNOX (10.2) y del valor objetivo del eNOX (8.2) . El generador de error de la MRX (30) obtiene las tres componentes de error asimétrico proporcional eNMB (14.1) , simétrico integral eNMB (14.2) y asimétrico derivativo eNMB (14.3) a partir de la variable de monitorización filtrada del eNMB (10.3) y del valor objetivo del eNMB (8.3) . Los errores indicarán en el momento de su evaluación la desviación del vector de variables de monitorización (6) respecto del vector de objetivos de las variables monitorizadas (8) . Paso 5: Calcular un vector de perfusiones de control de fármacos de ePPF (15.1) , de eRMF (15.2) y de eRCN (15.3) mediante un controlador multivariable y con sinergia MIMO-PID (16) que presenta como entradas los vectores de errores de control (12, 13, 14) y el vector de perfusiones del protocolo manual (4) . El controlador multivariable y con sinergia MIMO-PID (16) está formado por tres subsistemas de control MISO-PID (25, 26, 27) , que a su vez cada uno está formado por tres controladores SISO-PID: 1) para obtener la perfusión de control del ePPF (15.1) se usan los controladores SISO-PID (25.1, 25.2, 25.3) ; 2) para obtener la perfusión de control del eRMF (15.2) se usan los controladores SISO-PID (26.1, 26.2, 26.3) ; y 3) para obtener la perfusión de control del eRCN (15.3) se usan los controladores SISO-PID (27.1, 27.2, 27.3) . Paso6 : Calcular un vector de corrección (18) formado por la perfusión correctora de ePPF (18.1) , la perfusión correctora de eRMF (18.2) y la perfusión correctora de eRCN (18.3) mediante un sistema corrector de perfusiones (17) que está formado por un subsistema de corrección de la perfusión del ePPF (17.1) , un subsistema de corrección de la perfusión del eRMF (17.2) y un subsistema de corrección de la perfusión del eRCN (17.3) a partir del vector de variables filtradas de monitorización (10) compuesto por la monitorización filtrada del eBIS (10.1) , la monitorización filtrada del eNOX (10.2) y la monitorización filtrada del eNMB (10.3) ; el vector de corrección (18) trata de compensar el vector de perfusiones de control (15) con el fin de evitar la infraperfusión para mitigar el efecto de la disminución de la DoH, ANG y MRX; el vector de corrección (18) se calcula en base a un vector de umbrales superior e inferior sobre el vector de variables filtradas de monitorización (10) ; Paso 7: Calcular un vector de control fiable (20) formado por la perfusión fiable de ePPF (20.1) , la perfusión fiable de eRMF (20.2) y la perfusión fiable de eRCN (20.3) mediante un sistema de seguridad (19) que está formado por un subsistema de seguridad de la perfusión del ePPF (19.1) , un subsistema de seguridad de la perfusión del eRMF (19.2) y un subsistema de seguridad de la perfusión del eRCN (19.3) a partir del vector de perfusiones de control (15) formado por la perfusión de control del ePPF (15.1) , la perfusión de control del eRMF (15.2) y la perfusión de control del eRCN (15.3) y a partir del vector de corrección (18) formado por la perfusión correctora de ePPF (18.1) , la perfusión correctora de eRMF (18.2) y la perfusión correctora de eRCN (18.3) ; el sistema de seguridad (19) trata de compensar el vector de perfusiones de control (15) para conducir al vector de control fiable (20) a un valor fiable para el paciente (1) y fiable para causar el efecto deseado en el paciente (1) , lo que evita la sobreperfusión e infraperfusión, con ello se consigue evitar periodos de anestesia general profunda que compromete la vida del paciente o periodos de sedación lo que puede ocasionar despertares intraoperatorios; para evitar la sobreperfusión se aplican unos vectores de restricción de suspensión del sistema de bombas de perfusión (2) y para evitar la infraperfusión se aplica el vector de corrección (18) ; Paso 8 : Calcular un vector de perfusiones automáticas (22) formado por la perfusión automática de ePPF (22.1) , la perfusión automática de eRMF (22.2) y la perfusión automática de eRCN (22.3) mediante un sistema cuantificador (21) que está formado por un subsistema de cuantificación de la perfusión del ePPF (21.1) , un subsistema de cuantificación de la perfusión del eRMF (21.2) y un subsistema de cuantificación de la perfusión del eRCN (21.3) a partir de un vector de control fiable (20) formado por la perfusión fiable de ePPF (20.1) , la perfusión fiable de eRMF (20.2) y la perfusión fiable de eRCN (20.3) ; el sistema cuantificador (21) modifica las perfusiones para que el vector de control fiable (20) sean interpretable por el sistema de bombas de perfusión (2) , compuesto por la bomba de ePPF (2.1) , la bomba de eRMF (2.2) y la bomba de eRCN (2.3) , que a través de varios catéteres infunden los fármacos vía IV dentro del cuerpo del paciente (1) ; Paso9: Definir el vector de perfusión de fármacos anestésicos (5) compuesto por la perfusión de ePPF (5.1) , la perfusión de eRMF (5.2) y la perfusión de eRCN (5.3) mediante un sistema de conmutación (23) para controlar el tiempo transcurrido en la IPh, el tiempo en la MPh y el tiempo en la RPh; en la IPh el vector de perfusión de fármacos anestésicos (5) es el mismo que el vector de perfusiones del protocolo manual (4) ; en la MPh el vector de perfusión de fármacos anestésicos (5) es el mismo que el vector de perfusiones automáticas (22) ; y en la RPh se activa la suspensión del sistema de bombas de perfusión (2) ; Paso 10: Calcular la perfusión de control del fármaco ePPF (15.1) a partir del subsistema de control MISO-PID-ePPF Ci (25) , que a su vez está formado por tres controladores SISO-PID (C11, C12, C13) (25.1, 25.2, 25.3) , cada controlador SISO-PID está formado a su vez por tres acciones de control de fármacos que se detallan a continuación: 1) el controlador SISO-PID C11 (25.1) que calcula la contribución a la perfusión de la perfusión de fármaco ePPF (15.1.1) aportada por el vector de error de control del monitor eBIS (12) , está formado por una acción proporcional que relaciona la perfusión parcial de ePPF (15.1.1.1) con el error asimétrico de control proporcional relativo al eBIS (12.1) , por una acción integral que relaciona la perfusión parcial de ePPF (15.1.1.2) con el error simétrico de control integral relativo al eBIS (12.2) y por una acción derivativa que relacional la perfusión parcial de ePPF (15.1.1.3) con el error asimétrico derivativo relativo al eBIS (12.3) ; 2) el controlador SISO-PID C12 (25.2) que calcula la contribución a la perfusión de control de la perfusión de fármaco ePPF (15.1.2) aportada por el vector de error de control del monitor eNOX (13) , está formado por una acción proporcional que relaciona la perfusión parcial de ePPF (15.1.2.1) con el error asimétrico de control proporcional relativo al eNOX (13.1) , por una acción integral que relaciona la perfusión parcial de ePPF (15.1.2.2) con el error simétrico de control integral relativo al eNOX (13.2) y por una acción derivativa que relaciona la perfusión parcial de ePPF (15.1.2.3) con el error asimétrico derivativo relativo al eNOX (13.3) ; 3) el controlador SISO-PID C13 (25.3) que calcula la contribución a la perfusión de control de la perfusión de fármaco ePPF (15.1.3) aportada por el vector de error de control del monitor eNMB (14) , está formado por una acción proporcional que relaciona la perfusión parcial de ePPF (15.1.3.1) con el error asimétrico de control proporcional relativo al eNMB (14.1) , por una acción integral que relaciona la perfusión parcial de ePPF (15.1.3.2) con el error simétrico de control integral relativo al eNMB (14.2) y por una acción derivativa que relaciona la perfusión parcial de ePPF (15.1.3.3) con el error asimétrico derivativo relativo al eNMB (14.3) ; Paso11: Calcular la perfusión de control del fármaco eRMF (15.2) a partir del subsistema de control MISO-PID-eRMF C2 (26) , que a su vez está formado por tres controladores SISO-PID (C21, C22, C23) (26.1, 26.2, 26.3) , cada controlador SISO-PID está formado a su vez por tres acciones de control de fármacos que se detallan a continuación: 1) el controlador SISO-PID C21 (26.1) que calcula la contribución a la perfusión de control de la perfusión de fármaco eRMF (15.2.1) aportada por el vector de error de control del monitor eBIS (12) , está formado por una acción proporcional que relaciona la perfusión parcial de ePPF (15.2.1.1) con el error asimétrico de control proporcional relativo al eBIS (12.1) , por una acción integral que relaciona la perfusión parcial de eRMF (15.2.1.2) con el error simétrico de control integral relativo al eBIS (12.2) y por una acción derivativa que relacional la perfusión parcial de eRMF (15.2.1.3) con el error asimétrico derivativo relativo al eBIS (12.3) ; 2) el controlador SISO-PID C22 (26.2) que calcula la contribución a la perfusión de control de la perfusión de fármaco eRMF (15.2.2) aportada por el vector de error de control del monitor eNOX (13) , está formado por una acción proporcional que relaciona la perfusión parcial de eRMF (15.2.2.1) con el error asimétrico de control proporcional relativo al eNOX (13.1) , por una acción integral que relaciona la perfusión parcial de eRMF (15.2.2.2) con el error simétrico de control integral relativo al eNOX (13.2) y por una acción derivativa que relaciona la perfusión parcial de eRMF (15.2.2.3) con el error asimétrico derivativo relativo al eNOX (13.3) ; 3) el controlador SISO-PID C23 (26.3) que calcula la contribución a la perfusión de control de la perfusión de fármaco eRMF (15.2.3) aportada por el vector de error de control del monitor eNMB (14) , está formado por una acción proporcional que relaciona la perfusión parcial de eRMF (15.2.3.1) con el error asimétrico de control proporcional relativo al eNMB (14.1) , por una acción integral que relaciona la perfusión parcial de eRMF (15.2.3.2) con el error simétrico de control integral relativo al eNMB (14.2) y por una acción derivativa que relaciona la perfusión parcial de eRMF (15.2.3.3) con el error asimétrico derivativo relativo al eNMB (14.3) ; Paso12: Calcular la perfusión de control del fármaco eRCN (15.3) a partir del subsistema de control MISO-PID-eNMB C3 (27) , que a su vez está formado por tres controladores SISO-PID (C31, C32, C33) (27.1, 27.2, 27.3) , cada controlador SISO-PID está formado a su vez por tres acciones de control de fármacos que se detallan a continuación: 1) el controlador SISO-PID C31 (27.1) que calcula la contribución a la perfusión de control de la perfusión de fármaco eRCN (15.3.1) aportada por el vector de error de control relativo al eBIS (12) , está formado por una acción proporcional que relaciona la perfusión parcial de eRCN (15.3.1.1) con el error asimétrico de control proporcional relativo al eBIS (12.1) , por una acción integral que relaciona la perfusión parcial de eRCN (15.3.1.2) con el error simétrico de control integral relativo al eBIS (12.2) y por una acción derivativa que relaciona la perfusión parcial de eRCN (15.3.1.3) con el error asimétrico derivativo relativo al eBIS (12.3) ; 2) el controlador SISO-PID C32 (27.2) que calcula la contribución a la perfusión de control de la perfusión de fármaco eRCN (15.3.2) aportada por el vector de error de control del m onitor eNOX (13) , está formado por una acción proporcional que relaciona la perfusión parcial de eRCN (15.3.2.1) con el error asimétrico de control proporcional relativo al eNOX (13.1) , por una acción integral que relaciona la perfusión parcial de eRCN (15.3.2.2) con el error simétrico de control integral relativo al eNOX (13.2) y por una acción derivativa que relaciona la perfusión parcial de eRCN (15.3.2.3) con el error asimétrico derivativo relativo al eNOX (13.3) ; 3) el controlador SISO-PID C33 (27.3) que calcula la contribución a la perfusión de control de la perfusión de fármaco eRCN (15.3.3) aportada por el vector de error de control relativo al eNMB (14) , está formado por una acción proporcional que relaciona la perfusión parcial de eRMF (15.3.3.1) con el error asimétrico de control proporcional relativo al eNMB (14.1) , por una acción integral que relaciona la perfusión parcial de eRCN (15.3.3.2) con el error simétrico de control integral relativo al eNMB (14.2) y por una acción derivativa que relaciona la perfusión parcial de eRCN (15.3.3.3) con el error asimétrico derivativo relativo al eNMB (14.3) ; A continuación, se expresan las ecuaciones que definen el sistema de control SynPlD que, haciendo uso del vector de perfusiones del protocolo manual (4) , del vector de variables de monitorización (6 ) , del vector de objetivos de las variables monitorizadas (8 ) , de los vectores de los errores de control (12, 13, 14) , del vector de corrección (18) y del vector de control fiable (20) , obtiene un vector de perfusión de fármacos anestésicos (5) que mantendrá al paciente (1) en un estado anestésico satisfactorio a pesar de la cirugía. Los fármacos considerados son ePPF, eRMF y eRCN y los monitores considerados son eBIS, eNOX y eNMB, por lo que el orden de los vectores se fija en 3x1 y el orden de las matrices en 3x3, en este ejemplo de realización de la invención. Resaltar que la presente invención no hace uso de modelos fármacocinéticos o fármacodinamicos para su diseño ni para la personalización a cada paciente (1) . Antes de detallar el método y en aras de clarificar las variables que aparecen en las ecuaciones, se relacionan a continuación las más importantes agrupadas por sus unidades físicas y características comunes: 1) Las dimensiones del sistema multivariable son de 3x3, relativo al vector de variables de monitorización (6 ) r=3, donde 1 hace referencia al eBIS, 2 hace referencia al eNOX y 3 hace referencia al eNMB; y relativo al vector de perfusión de fármacos anestésicos (5) s=3, donde 1 hace referencia al ePPF, 2 hace referencia al eRMF y 3 hace referencia al eRCN; 2) El tiempo discretizado se representa con el número entero k, de tal forma que un tiempo real t, se puede mostrar como: t=k-Ts; donde Ts es el periodo de perfusión; el tiempo de inicio de la IPh es t, el tiempo de inicio de la MPh es tm y el inicio del tiempo de la RPh es tr; 3) Vectores que hacen referencia a las perfusiones de fármacos, unidades de perfusión por peso del paciente [pg/ (min-kg) j, ecuación general: U X = [«x1 Mx2 Mx3 T Donde ux hace referencia al vector columna de perfusiones con dimensión (3x1) ; ux1 es la perfusión del ePPF; ux2 es la perfusión del eRMF; ux3 es la perfusión del eRCN; T indica la transposición del vector. El listado de variables de perfusión es el siguiente: x Ref. Vector de perfusiones Símbolo Ecuac. x: hace referencia al subíndice del vector considerado; Ref. indica el número que aparece en las figuras; Símbolo: Identifica la variable por su nombre; Ecuac. indica la ecuación de la descripción general donde ha sido definida. ) Vectores que hacen referencia a las variables de monitorización, unidades de monitorización (UM) y el rango de variación es de 0 a 100; ecuación general: yz = [y2i yz2 yz3 ]T, Donde yz hace referencia al vector columna variables de monitorización (3x1) ; yz1 es la monitorización del eBIS; yz2 es la monitorización del eNOX; yz3 es la monitorización del eNMB; T indica la transposición del vector. El listado de variables de monitorización y sus variantes es el siguiente: z Ref. Descripción del vector de Símbolo Ecuac. 6 variables de monitorización medidas y [2. 1] T 8 valores objetivo de las variables monit yT [2.6] f 10 variables de monitorización filtradas yf [3. 1] HI umbrales superiores de activación de yHI [6.3] LO umbrales inferiores de activación de l yLO [6. 4] z: hace referencia al subíndice del vector considerado; Ref. indica el número que aparece en las figuras; Símbolo: Identifica la variable por su nombre; Ecuac. indica la ecuación de la descripción general donde ha sido definida. ) Vectores que hacen referencia a los vectores de los errores de control (12, 13, 14) , con rango de variación ±200 UM; ecuación general: e j = \_e P j e i j e F j \ ' Donde ej hace referencia al vector columna de errores de control (3x1) ; e1 es el vector de error de control relativo al eBIS; e2 es el vector de error de control relativo al eNOX; e3 es el vector de error de control relativo al eNMB; eP¡ es el vector de error asimétrico de control proporcional relativo al monitor¡; e¡ es el vector de error simétrico de control integral relativo al monitor ¡; y eF¡ es el vector de error asimétrico y filtrado de control derivativo relativo al monitor¡; T indica la transposición del vector. El listado de variables de error y sus variantes es el siguiente: j Ref. Descripción del error de control Símbolo Ecuac. j: hace referencia al subíndice del vector considerado; Ref. indica el número que aparece en las figuras; Símbolo: Identifica la variable por su nombre; Ecuac. indica la ecuación de la descripción general donde ha sido definida. ) Variables que hacen referencia al controlador multivariable y con sinergia MIMO-PID (16) ; a los subsistemas de control MISO-PID (25, 26, 27) y a los controladores SISO-PID. Donde [PID] es la matriz de controladores PID que componen el controlador multivariable y con sinergia MIMO-PID (16) ; C-i es el vector de controladores PID que componen el subsistema de control MISO-PID-ePPF (25) ; C2 es el vector de controladores PID que componen el subsistema de control MISO-PID-eRMF (26) ; C3 es el vector de controladores PID que componen el subsistema de control MISO-PID-eNMB (27) ; Cj es el controlador SISO-PID que relaciona el error asociado al monitor i con el fármaco j. b j Ref. Descripción del controlador PID Símbolo Ecuac. , . i, j: hace referencia al subíndice/s del/los controlador/es considerado/s; Ref. indica el número que aparece en las figuras; Símbolo: Identifica la variable por su nombre; Ecuac. indica la ecuación de la descripción general donde ha sido definida. El sistema de la presente invención se actualiza cada Ts segundos, tiempo asociado al periodo de muestreo. El sistema se inicia en el tiempo t¡ con la IPh. A partir del instante de conmutación para pasar de la IPh a la MPh (tm) los valores son actualizados cada periodo de ejecución del método (Ts) según las ecuaciones 2 a 13, según se detalla a continuación: Ecuación 2: Medir el vector de variables de monitorización (6) ; definir y calcular el vector de perfusiones del protocolo manual (4) ; y fijar el vector de objetivos de las variables monitorizadas (8) . Estos son los resultados obtenidos en el paso 2. Ref. Definición matemática Ecuac. Ref. indica el número que aparece en las figuras; Ecuac. indica la ecuación de la descripción general donde ha sido definida, particularizada para s=r=3. Ecuación 3: Calcular el vector de variables filtradas de monitorización (10) , definir un banco de filtros (9) , basados en filtros paso bajo de orden 1; y definir un vector de frecuencias de corte. El resultado del paso 3 es el vector de variables filtradas de monitorización (10) . Ref. Definición matemática Ecuac. Ref. indica el número que aparece en las figuras; Ecuac. indica la ecuación de la descripción general donde ha sido definida, particularizada para s=r=3. Ecuación 4: Calcular el vector de error de control del monitor eBIS ei (12) con el generador de error de la DoH (28) , el vector de error de control del monitor eNOX e2 (13) con el generador de error de la ANG (29) , y el vector de error de control del monitor eNMB e3 (14) con el generador de error de la RMX (30) , cada uno con sus componentes proporcional, integral y derivativa (12.1, 12.2, 12.3) , (13.1, 13.2, 13.3) y (14.1, 14.2, 14.3) ; calcular los errores asimétrico proporcional (12.1, 13.1, 14.1) , simétrico integral (12.2, 13.2, 14.2) y asimétrico derivativo (12.3, 13.3, 14.3) , de cada controlador SISO-PID. Los errores asimétricos mostrados en la presente invención se calculan de tal forma que el vector de objetivos de las variables monitorizadas (8) está ponderado por una matriz de coeficientes [B] en la acción proporcional y una matriz de coeficientes [G] en la acción derivativa, siendo unitario el valor de ponderación de la acción integral. El sistema de control SynPlD de la presente invención se definen tanto [B] como [G] dependientes del vector de variables de monitorización (6) y del vector de objetivos de las variables monitorizadas (8) . Los resultados del paso 4 son los vectores de los errores de control (12, 13, 14) . Ref. Definición matemática Ecuac. Ref. Definición matemática Ecuac. Ref. indica el número que aparece en las figuras; Ecuac. indica la ecuación de la descripción general donde ha sido definida, particularizada para s=r=3. Ecuación 5: Calcular el vector de perfusiones de control (15) mediante un controlador multivariable y con sinergia MIMO-PID (16) , los vectores de los errores de control del monitor eBIS (12) , eNOX (13) y eNMB (14) y el vector de perfusiones del protocolo manual (4) ; definir la matriz [PID] de controladores SISO-PID que componen el controlador multivariable y con sinergia MIMO-PID (16) ; definir los controladores SISO-PID C¡j relativos al monitor j y al fármaco /; definir las acciones de control proporcional, integral y derivativa de los controladores SISO-PID cuya suma define la acción de control total de cada controlador SISO-PID; definir las matrices de ganancias relativas a los controladores SISO-PID; definir la matriz de sinergia de fármacos; definir el vector Ko de ganancias sobre el vector de perfusiones del protocolo manual (4) ; definir los subsistemas de control MISO-PID (25, 26, 27) . El resultado del Paso 5 es el vector de perfusiones de control (15) . Ref. Definición matemática Ecuac. 15 Upid = [M1 U2 U3 ] [5. 1] Ref. Definición matemática Ecuac. K oí = [ K on K ol 2 K ol 3 f [5. 11] Ref. Definición matemática Ecuac. Ref. indica el número que aparece en las figuras; Ecuac. indica la ecuación de la descripción general donde ha sido definida, particularizada para s=r=3. Ecuación 6 : Definir y calcular unas perfusiones correctoras de fármacos (18) a partir del vector de variables filtradas de monitorización (10) ; definir los vectores de umbrales superiores e inferiores de activación de la corrección. El resultado del paso 6 es el vector de corrección (18) . Ref. Definición matemática Ecuac. Ref. Definición matemática Ecuac. Ref. indica el número que aparece en las figuras; Ecuac. indica la ecuación de la descripción general donde ha sido definida, particularizada para s=r=3. Ecuación 7: Definir y calcular el vector de control fiable (20) , para evitar la hiper/infra dosificación de fármacos, a partir del vector de perfusiones de control (15) y del vector de corrección (18) ; definir los vectores de limites superiores e inferiores de la perfusión de fármacos atendiendo a dos conceptos: 1) sólo se puede aplicar perfusiones positivas al paciente (1) , por tanto, el sistema de bombas de perfusión (2) queda suspendido (perfusión nula) cuando el vector de perfusiones de control (15) más el vector de corrección (18) da como resultado perfusiones negativas o nulas; y 2) los límites máximos de las perfusiones deben de evitar las sobredosis de fármacos para evitar los niveles de toxicidad. El resultado del paso 7 es el vector de control fiable (20) . Ref. Definición matemática Ecuac. Ref. Definición matemática Ecuac. Ref. indica el número que aparece en las figuras; Ecuac. indica la ecuación de la descripción general donde ha sido definida, particularizada para s=r=3. Ecuación 8 : Definir y calcular el vector de perfusiones automáticas (22) a partir del vector de control fiable (20 ) ; definir el vector de resoluciones de cada bomba de perfusión de fármacos; el vector de control fiable (20 ) se acomoda a la resolución del sistema de bombas de perfusión continua (2 ) para obtener así el vector de perfusiones automáticas (22) que se dispensan al paciente (1) . El resultado del paso 8 es el vector de perfusiones automáticas (22 ) . Ref. Definición matemática Ecuac. Ref. indica el número que aparece en las figuras; Ecuac. indica la ecuación de la descripción general donde ha sido definida, particularizada para s=r=3. Ecuación 9: Definir y calcular el vector de perfusión de fármacos anestésicos (5) a partir del vector de perfusiones del protocolo manual (4) y el vector de perfusiones automáticas (22) a partir de un sistema de conmutación (23) . El resultado del paso 9 es el vector de perfusiones de fármacos anestésicos (5) . Ref. Definición matemática Ecuac. Ref. indica el número que aparece en las figuras; Ecuac. indica la ecuación de la descripción general donde ha sido definida, particularizada para s=r=3. Ecuación 10: Definir el subsistema de control MISO-PID-ePPF (25) como un conjunto de controladores SISO-PID; calcular la perfusión de control del ePPF (15.1) ; a partir de los controladores SISO-PID (25.1, 25, .2, 25.3) , de los vectores de los errores de control (12, 13, 14) y de la perfusión de ePPF del protocolo manual (4.1) . El resultado del paso 10 es la perfusión de control del ePPF (15.1) . Ref. Definición matemática Ecuac. Ref. indica el número que aparece en las figuras; Ecuac. indica la ecuación de la descripción general donde ha sido definida, particularizada para s=r=3. Ecuación 11: Definir el subsistema de control MISO-PID-eRMF (26) como un conjunto de controladores SISO-PID; calcular la perfusión de control del eRMF (15.2) ; a partir de los controladores SISO-PID (26.1, 26, .2, 26.3) , de los vectores de los errores de control (12, 13, 14) y de la perfusión de ePPF del protocolo manual (4.2) . El resultado del paso 11 es la perfusión de control del eRMF (15.2) . Ref. Definición matemática Ecuac. Ref. Definición matemática Ecuac. Ref. indica el número que aparece en las figuras; Ecuac. indica la ecuación de la descripción general donde ha sido definida, particularizada para s=r=3. Ecuación 12: Definir el subsistema de control MISO-PID-eNMB (27) como un conjunto de controladores SISO-PID; calcular la perfusión de control del eRCN (15.3) ; a partir de los controladores SISO-PID (27.1, 27, .2, 27.3) , de los vectores de los errores de control (12, 13, 14) y de la perfusión de eRCN del protocolo manual (4.3) . El resultado del paso 11 es la perfusión de control del eRCN (15.3) . Ref. Definición matemática Ecuac. U3 C3 -S, + K ol3 'Ug¡3 15.3 [12.2] U3 C3l'$31 + C32 '^ 32 + C33 '$33 + K ol3 'Uol3 Ref. indica el número que aparece en las figuras; Ecuac. indica la ecuación de la descripción general donde ha sido definida, particularizada para s=r=3. Ecuación 13: Se formula para la reivindicación de nuevos fármacos y monitores. Ref. Definición matemática Ecuac. Ref. indica el número que aparece en las figuras; Ecuac. indica la ecuación de la descripción general donde ha sido definida, particularizada para s=r=3. Ecuación 14: Ajuste de los parámetros del sistema de control SynPID a cada paciente para absorber la variabilidad inter/intrapaciente. El ajuste involucra al paso 3 y al paso 5 de la invención. En el paso 3 se han de ajustar las frecuencias de corte de los filtros expresadas en las ecuaciones [3. 5] y [3. 6 ]. En el paso 5 se han de ajustar las matrices de ganancias del controlador multivariable y con sinergia MIMO-PID (16) expresadas en las ecuaciones [5. 16], [5. 17] y [5. 18]. La información necesaria para el ajuste se extrae en la IPh donde al paciente (1) se le somete únicamente al vector de perfusiones del protocolo manual (4) . Por tanto, desde t¡ hasta tm se almacenan en una memoria las ejecuciones del método y justo en el tiempo tm se aplica una variante del método de Cohen-Coon de ajuste empírico de PIDs y en ese instante el sistema de conmutación (23) el vector de perfusión de fármacos anestésicos (5) es el resultado del sistema de control SynPlD (24) según el vector de perfusiones automáticas (22) . Las ganancias relativas a la matriz de ganancias proporcional [5. 19] está relacionada con el peso del paciente y el vector de perfusiones del protocolo manual (4) están relacionadas con el peso, altura, género y masa muscular del paciente. La ecuación 14 involucra a todos los pasos definidos para la invención propuesta, pero de forma directa involucra especialmente a los pasos 3, 5 y 6. Una vez calculadas las ganancias en el tiempo tm, estas permanecerán constantes hasta el tiempo de recuperación tr. Los sistemas que necesitan ajuste son: - Banco de filtros (9) : es necesario ajustar los tres parámetros que hacen referencia a la frecuencia de corte. - Controlador multivariable y con sinergia MIMO-PID (16) : es necesario ajustar 18 parámetros, por cada controlador SISO-PID hay que ajusta una ganancia proporcional, una integral y una derivativa. - Sistema corrector de perfusiones (17) : que utiliza las ganancias proporcionales del controlador multivariable y con sinergia MIMO-PID (16) . Ref. Definición matemática Ecuac. Ref. indica el número que aparece en las figuras; Ecuac. indica la ecuación de la descripción general donde ha sido definida, particularizada para s=r=3. "x" identifica el producto elemento a elemento (producto Schur) . Donde K es una ganancia universal [ (¡ig/ (min) ) /UM]; [KP] es la matriz de ganancias proporcionales [ (pg/ (min-kg) ) /UM]; [K|] es la matriz de ganancias integrales [ (pg/ (min-kg) ) / (UM-min) ]; [T|] es la matriz de tiempos de acción integral [min]; [KD] es la matriz de ganancias derivativas [ (pg/kg) /UM]; [TD] es la matriz de tiempos de acción derivativo [min]. Ecuación 15: Ajuste de otros parámetros del sistema de control SynPÍD que son universales y comunes a todos los pacientes (común a la variabilidad inter/intrapaciente) . Estos parámetros son en general constantes, pero pueden ser ajustados de forma explícita y generalizada por sexo, grupos de población (diabéticos, obesos...) , tipos de cirugía, por territorios y/o edades. A continuación, se relacionan los parámetros considerados y las ecuaciones en las que aparecen: Parámetro Tipo Definición Ecuac. Parámetro Tipo Definición Ecuac. APLICACIÓN INDUSTRIAL Respecto de la implementación del sistema de multi-perfusión de fármacos con sinergia mediante control en CL MIMO-PID (SynPlD) aplicado en actos anestésicos vía IV de la presente invención, una de las realizaciones contempla su ejecución en código interpretable por dispositivos Android, IOS, Arduino, Raspberr y -PI, ordenador personal, bombas de perfusión comerciales o hardware específico. El sistema de control SynPID se ejecuta de forma iterativa cada Ts segundos y consta de las siguientes fases: 1) Puesta en servicio en t¡ donde existen N¡ iteraciones del método; 2) IPh, desde t¡ hasta tm, donde existen Nm-N¡ iteraciones del método; 3) MPh, desde tm hasta tr; y 4) RPh, a partir de tr, donde existen Nr-Nm iteraciones del método. El resultado de cada iteración es obtener el vector de perfusión de fármacos anestésicos (5) que se ha de administrar al paciente (1) con el sistema de bombas de perfusión (2 ) para que el vector de variables de monitorización (6 ) sea conducido al vector de objetivos de las variables monitorizadas (8 ) a pesar del vector de actuaciones quirúrgicas (7) . Las acciones a tomar en cada una de las fases de aplicación del método SynPID implementado en cualquiera de los dispositivos antes indicados son: 1) Antes de la puesta en servicio se deben de obtener los siguientes datos: 1) del paciente (1) el peso, edad, sexo, altura y masa muscular para ajustar vector de perfusiones del protocolo manual (4) del que derivarán los valores de los vectores de las ecuaciones [2.4] y [2.5]; 2) del sistema de bombas de perfusión (2) su resolución para ajustar el vector de la ecuación [8. 3]; 3) del sistema SynPlD (24) su periodo de ejecución mostrado en la ecuación [2. 4]; la matriz de sinergia de fármacos mostrada en la ecuación [5. 10]; las matrices de asimetría de los errores de control mostrados en las ecuaciones [4. 3] y [4. 5] y en general de todos los parámetros mostrados en la Ecuación 15. 2) En la IPh el vector de perfusión de fármacos anestésicos (5) que se administra al paciente (1) se corresponde con el vector de perfusiones del protocolo manual (4) tal y como se mostró en la ecuación [2. 3]. 3) Al final de la IPh se realiza el ajuste de las matrices de ganancias mostradas en las ecuaciones [5. 4], [5. 5] y [5. 6] y en general de todos los parámetros mostrados en la Ecuación 14. 4) En la MPh el vector de perfusión de fármacos anestésicos (5) que se administra al paciente (1) se corresponde con el vector de perfusiones automáticas (22) . 5) En la RPh el vector de perfusión de fármacos anestésicos (5) que se administra al paciente (1) se anula. En una iteración indeterminada del sistema de control SynPlD se deben de seguir las siguientes actuaciones y en el orden indicado: 1. Hay que comenzar por adquirir la información del vector de variables de monitorización (6) utilizando los equipos de monitorización (3) , la información adquirida en la iteración actual y en las iteraciones pasadas se almacenan en una memoria para su posterior utilización; la información obtenida en esta actuación servirá para la realimentación del sistema de control en CL; 2. Hay que fijar el vector de objetivos de las variables monitorizadas (8) ; el resultado de la iteración actual y de las iteraciones pasadas se almacenan en una memoria para su posterior utilización; 3. Hay que proceder a la limpieza de ruido y artefactos del vector de variables de monitorización (6) mediante un banco de filtros (9) para obtener el vector de variables filtradas de monitorización (10) ; el resultado de la iteración actual y de las iteraciones pasadas se almacenan en una memoria para su posterior utilización; 4. Hay que calcular los vectores de los errores de control (12, 13, 14) mediante un generador de errores de control (11) ; cada vector de error de control está formado por un error asimétrico proporcional, un error simétrico integral y un error asimétrico derivativo; utilizando los instantes actuales del vector de objetivos de las variables monitorizadas (8) y del vector de variables filtradas de monitorización (10) ; el resultado de la iteración actual y de las iteraciones pasadas se almacenan en una memoria para su posterior utilización; Hay que calcular el vector de perfusiones de control (15) mediante un controlador multivariable y con sinergia MIMO-PID (16) que presenta como entradas los vectores de los errores de control (12, 13, 14) y el vector de perfusiones del protocolo manual (4) ; de cada controlador SISO-PID se obtiene la contribución a cada fármaco de cada error de control distribuida en una acción proporcional que hace uso de la iteración actual, una acción integral que hace uso de la iteración actual y todas las pasadas y una acción derivativa que hace uso de la iteración actual y de la anterior; el resultado de la iteración actual y de las iteraciones pasadas se almacenan en una memoria para su posterior utilización; Hay que calcular un vector de corrección (18) mediante un sistema corrector de perfusiones (17) que presenta a su entrada el vector de variables filtradas de monitorización (10) de la iteración actual; el resultado de la iteración actual y de las iteraciones pasadas se almacenan en una memoria para su posterior utilización; Hay que calcular un vector de control fiable (20) mediante un sistema de seguridad (19) que presenta a su entrada la iteración actual del vector de perfusiones de control (15) y del vector de corrección (18) ; el resultado de la iteración actual y de las iteraciones pasadas se almacenan en una memoria para su posterior utilización; Hay que calcular un vector de perfusiones automáticas (22) mediante un sistema cuantificador (21) que presenta a su entrada la iteración actual del vector de control fiable (20) ; el resultado de la iteración actual y de las iteraciones pasadas se almacenan en una memoria para su posterior utilización; Hay que definir el vector de perfusión de fármacos anestésicos (5) mediante un sistema de conmutación (23) que presenta como entradas la iteración actual del vector de perfusiones de control (15) , del vector de perfusiones del protocolo manual (4) y de un vector de ceros; el resultado de la iteración actual y de las iteraciones pasadas se almacenan en una memoria para su posterior utilización; Una vez que se ha obtenido el vector de perfusión de fármacos anestésicos (5) se comienza una nueva iteración, volviendo al punto uno de esta lista e incrementando del número de la iteración. El sistema de multi-perfusión de fármacos anestésicos con sinergia mediante control en CL MIMO-PID (SynPlD) aplicado en actos anestésicos vía IV de la presente invención, está preparado para su instalación en bombas de perfusión inteligentes que hacen uso de un circuito electrónico basado en un microprocesador con memoria, configurado para determinar el vector de perfusión de fármacos anestésicos (5) para administrar al paciente (1) por vía IV en un acto quirúrgico, cada periodo de iteración Tses configurable entre 1 y 30 segundos. El vector de perfusión de fármacos anestésicos (5) tiene como misión obtener un estado anestésico satisfactorio dado por el vector de objetivos de las variables monitorizadas (8) . El sistema de control SynPlD está configurado para llevar a cabo el método presentado en la invención que se repite cada Ts segundos, el sistema comprende la ejecución de los siguientes bloques: 1. Memoria: Una memorización del histórico de datos de la información procedente de los equipos de monitorización (3) , el vector de objetivos de las variables monitorizadas (8) , vector de variables filtradas de monitorización (10) , vectores de los errores de control (12, 13, 14) , vector de perfusiones de control (15) , vector de corrección (18) , vector de control fiable (20) y vector de perfusión de fármacos anestésicos (5) realizadas por el sistema de bombas de perfusión (2) y del código informático basado en las instrucciones necesarias para ejecutar el método SynPlD en un procesador; 2. Contador: Un contador de tiempos electrónico para determinar las fases IPh, MPh y RPh, estimando que la IPh dura entre 5 y 10 minutos, que la MPh es muy variable en duración en función de la cirugía y que la RPh dura entre 10 y 20 minutos; este contador implementa el sistema de conmutación (23) en forma de código informático y las instrucciones pertinentes para ejecutarlas en el procesador; 3. Ajuste: Una rutina software que se ejecuta en el tiempo tm para ajustar los parámetros del sistema de control SynPID a cada paciente (1) haciendo uso de las acciones mostradas en la Ecuación 14 y de la memoria del sistema; 4. Rutina 1: Rutina software reutilizable para la implementación del banco de filtros (9) haciendo uso de la matriz de ganancias [KD] mostrada en la ecuación [5. 6] y del coeficiente de filtrado N presentado en la ecuación [3. 4]; la rutina puede ser ejecutada varias veces con parámetros de entrada modificables, la rutina hace uso de la información almacenada en la memoria; Rutina 2: Rutina software reutilizable para la implementación del generador de errores de control (11) haciendo uso de los elementos de las matrices [B] y [G] dadas en las ecuaciones [4. 3] y [4. 5], cuyos valores están comprendidos entre 1 y 2; se implementa una sola rutina con el código de obtención de los vectores de los errores de control (12, 13, 14) , la rutina puede ser ejecutada varias veces con parámetros de entrada modificables, la rutina hace uso de la información almacenada en la memoria; Rutina 3: Rutina software reutilizable para la implementación del controlador multivariable y con sinergia MIMO-PID (16) haciendo uso de los controladores SISO-PID definidos en las ecuaciones [5. 14] y [5. 15]; se implementa una sola rutina con el código de ejecución de cada controlador SISO-PID que forman los tres subsistemas de control MISO-PID (25, 26, 27) y que a su vez forman el controlador multivariable y con sinergia MIMO-PID (16) , la rutina puede ser ejecutada varias veces con parámetros de entrada modificables, la rutina hace uso de la información almacenada en la memoria; Rutina 4: Rutina software que calcule el vector de perfusiones de control (15) con los resultados obtenidos de aplicar la Rutina 3 relativa a los resultados de los controladores SISO-PID y del vector de perfusiones del protocolo manual (4) , mostrados en las ecuaciones [5. 14] y [2. 4] [2. 5]; se implementa una sola rutina con el código de ejecución de obtener el vector de perfusiones de control (15) , la rutina hace uso de la información almacenada en la memoria; Rutina 5: Rutina software reutilizable para la implementación del sistema corrector de perfusiones (17) haciendo uso del vector de variables filtradas de monitorización (10) mostrado en la ecuación [3. 2], haciendo uso de las frecuencias de corte definidas en las ecuaciones [3. 3] y [3. 4]; se implementa una sola rutina con el código de ejecución del sistema corrector de perfusiones (17) , la rutina puede ser ejecutada varias veces con parámetros de entrada modificables, la rutina hace uso de la información almacenada en la memoria; Rutina 6: Rutina software reutilizable para la implementación del sistema de seguridad (19) haciendo uso del vector de perfusiones de control (15) mostrado en las ecuaciones [6. 1] y [6. 2], se implementa una sola rutina con el código de ejecución del sistema de seguridad (19) , la rutina puede ser ejecutada varias veces con parámetros de entrada modificables, la rutina hace uso de la información almacenada en la memoria; Rutina 7: Rutina software reutilizable para la implementación del sistema cuantificador (21) haciendo uso del vector de control fiable (20) mostrados en las ecuaciones [7. 1] y [7. 2], se implementa una sola rutina con el código de ejecución del sistema cuantificador (21) , la rutina puede ser ejecutada varias veces con parámetros de entrada modificables, la rutina hace uso de la información almacenada en la memoria.
+ ES-2808969_B2 SISTEMA DE PERFUSIÓN DE FÁRMACOS EN LAZO CERRADO CON CONTROL SINÉRGICO SECTOR DE LA TÉCNICA La presente invención se encuadra en el campo del control en lazo cerrado (closed-loop, CL) para la perfusión automática de fármacos, por ejemplo en actos de anestesia administrada por vía intravenosa (IV) , utilizando para ello un banco de algoritmos de control basados en variantes del controlador PID (proporcional-integral-derivativo) . La presente invención se enmarca en el sector de control automático de sistemas biológicos y presenta como principal campo de aplicación el multicontrol automatizado de las perfusiones de fármacos por vía IV en actos anestésicos. Pero puede ser empleado en el control de enfermedades agudas o crónicas en las que el paciente requiera de una monitorización múltiple con la perfusión de varios fármacos. Una aplicación directa de esta invención sería la aplicación en el páncreas artificial para el control de la diabetes tipo 1 con monitorización de la glucosa y con la infusión continua exógena de insulina y glucagón (Peters, T. M., and A. Haidar. "Dual- hormone artificial páncreas: benefits and limitations compared with single - hormone systems." Diabetic Medicine 35.4 (2018) : 450 459.) . De igual modo y con la misma idea se puede aplicar al sector veterinario para la dispensación simultánea de varios fármacos a los animales, con el fin de aplicarles anestesia. También podría ser usado para controlar patologías agudas o crónicas en las que se necesite monitorizar varias variables fisiológicas del animal y admistrarle varios fármacos de forma simultánea. ANTECEDENTES DE LA INVENCIÓN La definición de anestesiología, proporcionada por la American Board of anaesthesiology, afirma que la anestesiología es la práctica de la medicina que proporciona insensibilidad al dolor durante procedimientos quirúrgicos, obstétricos, terapéuticos y de diagnóstico. Los anestesiólogos administran los fármacos por diferentes accesos del cuerpo humano ara establecer un estado en el que se puede realizar una cirugía no traumática para el paciente. Las técnicas actuales de anestesia general establecen tres objetivos principales que deben cumplirse: 1) profundidad de la hipnosis (en inglés, Depth of Hypnosis, DoH) ; 2) analgesia (ANG) y 3) relajación muscular (en inglés, Muscle Relaxation, MRX) . Existen métodos para estimar estas variables (en esta descripción se referirá a estas variables como monitores) , respectivamente: 1) el índice biespectral (BIS) es una medida de electroencefalograma multifactorial derivada empíricamente, cuyo índice dado se correlaciona con la DoH del paciente (G. Schneider et al., Detection of awareness in surgical patients with eeg-based indicesbispectral index and patient state index, British journal of anaesthesia 91 (3) (2003) 329-335) ; 2) el índice de respuesta de estimulación nociceptiva (NOX) es un índice univariante calculado a partir de las concentraciones ponderadas del fármaco empleado, propuesto para predecir la probabilidad de respuesta a un estímulo nociceptivo durante la anestesia (P. Schumacher et al., Time-based online display of a noxious stimulus response index base on pharmacological data, in: Annual Meeting of the American Society of Anesthesiologists. San Francisco, California. Anesthesiology, Vol. 107, 2007, p. A17) ; y 3) el relajante muscular se administra con el fin de mantener el nivel deseado de bloqueo neuromuscular (NMB) durante la cirugía (Á. Miranda et al., Optimal time for constant drug infusion initialization in neuromuscular blockade control, in: 2014 IEEE International Symposium on Medical Measurements and Applications (MeMeA) , IEEE, 2014, pp. 1-6) . Adicionalmente, existen otras variables fisiológicas objeto de monitorización y de mucho interés para el especialista como son la cardiografía, la presión arterial, la oxigenación en sangre o la capnografía. El proceso de anestesia general IV generalmente conocido como anestesia IV total, se desarrolla en un escenario clínico que se presenta generalmente en tres fases: 1) fase de inducción (en inglés induction phase, IPh) , los fármacos se administran mediante bolo y perfusión constante; el paciente es conducido al estado anestésico deseado, tratando de obtener los valores deseados de DoH, ANG y MRX lo más rápidamente posible; 2) fase de mantenimiento (en inglés, maintenance phase, MPh) , comienza el procedimiento quirúrgico, y se realiza una perfusión de diferentes fármacos modificados convenientemente por el anestesiólogo para mantener el estado anestésico deseado; los fármacos utilizados de forma simultánea pueden presentar un efecto sinérgico; el objetivo en esta fase es mantener el estado anestésico cercano a los valores objetivo; y 3) fase de recuperación (en inglés, recover y phase, RPh) , se detiene la administración de los ármacos para recuperar la consciencia, para eliminar ANG y MRX (F. Padula, C. lonescu, N. Latronico, M. Paltenghi, A. Visioli, G. Vivacqua, Optimized PID control of depth of hypnosis in anesthesia, Computer methods and programs in biomedicine 144 (2017) 21-35) . En la actualidad, los protocolos más utilizados en IV son las perfusiones controladas manualmente y el método Target Control Infusion (TCI) , que consiste en administrar una perfusión constante de los fármacos también durante la MPh, calculada adecuadamente a partir de un valor de referencia deseado de perfusión (Á. Miranda et al., Optimal time for constant drug infusion initialization in neuromuscular blockade control, in: 2014 IEEE International Symposium on Medical Measurements and Applications (MeMeA) , IEEE, 2014, pp. 1-6) . La administración de fármacos IV por perfusión ofrece múltiples ventajas (M. C. van den Nieuwenhuyzen et al., Burm Target-controlled infusion systems, Clinical pharmacokinetics 38 (2) (2000) 181-190) . Sin embargo, varios factores no hacen tan evidente el uso de TCI en la práctica clínica, como la experiencia del anestesista, la preferencia personal, la variabilidad clínica farmacocinética interindividual y la comprensión de los principios de la TCI. En consecuencia, TCI se ha convertido en el puente entre la investigación en curso y la práctica clínica actual, abriendo la posibilidad de diseñar sofisticados sistemas de automatización. La aplicación del control con realimentación sobre los fármacos de perfusión en anestesia ha sido ampliamente investigado ya que el control automático en CL presenta una serie de ventajas socio-económicas, como son: 1) la reducción de costes tanto para el paciente como para el sistema sanitario, al igual que la reducción de la carga de trabajo del anestesiólogo; 2) la reducción de la dosis utilizada, lo que implica un tiempo de recuperación más rápido y, en consecuencia, una mejor recuperación del paciente en el postoperatorio; y 3) un rendimiento más robusto con menos episodios de sobre/infradosificación. En resumen, esto se traduce en una mayor seguridad clínica para el paciente (F. Padula et al., Optimized PID control of depth of hypnosis in anesthesia, Computer methods and programs in biomedicine 144 (2017) 21-35) . Sin embargo, aunque se han desarrollado varios sistemas en las últimas décadas, todos ellos siguen siendo prototipos sin marca CE ni aprobación de la FDA para su uso clínico. El control automático en anestesia pretende mantener un estado anestésico satisfactorio cercano a los valores objetivo de las variables de monitorización deseadas además de un alto rechazo a las perturbaciones consideradas como las modificaciones en el estado nestésico ocasionadas por la actuación del cirujano (F. Padula et al, Optimized PID control of depth of hypnosis in anesthesia, Computer methods and programs in biomedicine 144 (2017) 21-35) . Kai Kuck, en su artículo "The Three Laws of Autonomous and Closed-Loop Systems in anaesthesia" (Kuck, K., & Johnson, K. B. The three laws of autonomous and closed-loop systems in anesthesia. Anesthesia & Analgesia 124 (2017) 377-380) , postula tres leyes a las cuales los sistemas autónomos de anestesia deben estar sujetos: 1) no hacer daño, el sistema debe ser seguro para el paciente y en caso de fallo, debe fallar ligeramente, descartando cualquier tipo de peligro; 2) ser transparente, esto es, el sistema debe ejecutar los objetivos establecidos de forma fiable y comprensible, permitiendo al anestesiólogo predecir su comportamiento; y 3) reducir la carga de trabajo, el sistema en sí no debe requerir una atención excesiva para mantener una función adecuada, permitiendo que el anestesiólogo se centre en otras tareas más importantes. Los algoritmos de control más comunes utilizados en CL en anestesia son: modelo de control interno, modelo de control predictivo, control proporcional integral y derivativo (PID) y control basado en inteligencia artificial (F. Padula et al, Optimized PID control of depth of hypnosis in anesthesia, Computer methods and programs in biomedicine 144 (2017) 21-35) . Aun así, la opción más eficaz sigue siendo el control mediante PID, objeto de propuestas recientes y variadas. Además, se ha demostrado cómo el rendimiento alcanzado por un controlador PID correctamente ajustado aplicado en anestesia, tiene el mismo o mejor rendimiento que cualquier otro controlador, independientemente de su complejidad (L. Merigo et al, Event based control of propofol and remifentanil coadministration during clinical anesthesia, in: 2017 3rd International Conference on Event-Based Control, Communication and Signal Processing, IEEE, 2017, pp. 1-8) . Los controladores PID han sido utilizados mediante diferentes enfoques de diseño para abordar el problema de automaticación del acto anestésico. Existen propuestas primarias para la coadministración de PPF y RMF guiadas por BIS (N. Liu et al., Closed-loop coadministration of propofol and remifentanil guided by bispectral index: a randomized multicenter study, Anesthesia & Analgesia 112 (3) (2011) 546- 557) , pero también se presenta un enfoque de diseño más complejos (K. van Heusden et al., Robust miso control of propofol-remifentanil anesthesia guided by the neurosense monitor, IEEE Transactions on Control Systems Technology 26 (5) (2018) 1758-1770) , ofreciendo un ontrolador de salida única multientrada (MISO) para anestesia PPF-RMF guiado por la retroalimentación de una medida de DoH. Se han implementado otros enfoques basados en controladores PID para regular la DoH en anestesia utilizando la administración de PPF y el BIS como una variable controlada, con la diferencia de que Padula y su equipo (F. Padula et al., Optimized PID control of depth of hypnosis in anesthesia, Computer methods and programs in biomedicine 144 (2017) 21-35) establecen un conjunto de doce pacientes virtuales (VPs) representativos de una varianza poblacional relativamente grande que se utiliza para probar la robustez del controlador; y Merigo (L. Merigo et al., Event based control of propofol and remifentanil coadministration during clinical anesthesia, in: 2017 3rd International Conference on Event-Based Control, Communication and Signal Processing (EBCCSP) IEEE, 2017, pp. 1-8) propone un nuevo generador de eventos con altas propiedades de filtrado de ruido, además de un controlador PIDPlus, donde la acción de control se actualiza sólo cuando ocurre un evento. Por último, Merigo y su equipo (L. Merigo et al., A model-based control scheme for depth of hypnosis in anesthesia, Biomedical Signal Processing and Control 42 (2018) 216-229) realizaron un algoritmo de control PID basado en el modelo farmacocinético y farmacodinámico del paciente para la administración de PPF, cuya concentración estimada en el lugar de efecto se utiliza como señal de retroalimentación. Algunos de los trabajos más recientes ofrecen diferentes arquitecturas de esquemas de control PID, como Pawlowski y su equipo (A. Pawlowski et al, Two-degreeof-freedom control scheme for depth of hypnosis in anesthesia, IFACPapersOnLine 51 (4) (2018) 72 77) , que presentan un PID de dos grados de libertad para DoH, utilizando BIS como variable controlada. Presentan dos filtros, uno de primer orden y otro de segundo orden paso bajo, para obtener una respuesta adecuada a los cambios de producidos en la señal de referencia. Otro enfoque destacable es el presentado recientemente por Merigo (L. Merigo et al., Optimized pid control of propofol and remifentanil coadministration for general anesthesia, Communications in Nonlinear Science and Numerical Simulation 72 (2019) 194-212) , donde se propone un sistema optimizado en CL basado en PID para DoH mediante el uso de PPF-RMF y BIS. En este trabajo, el sintonizado se ha realizado mediante la aplicación de PSO (Particle Swarm Optimization) a una cohorte de 13 VPs. Se han identificado una serie de dificultades relacionadas con los problemas en el control en CL del acto anestésico que deben ser abordadas: 1) el control unilateral, debido a la o consideración de fármacos antagonistas; 2) los retardos, las oscilaciones en CL y las inestabilidades aumentan a causa de los retardos; 3) las variables a controlar no son las variables procedentes de los monitores (las mediciones) ; 4) los fármacos presentan un efecto de memoria cuando se administran al paciente; y 5) la sinergia que pueden presentar los distintos fármacos a administrar. Además, en el estado del arte se han podido detectar ciertas limitaciones en la aplicación del control en CL en anestesia, estas son: 1) no existe una propuesta formal que combine los principales estados anestésicos (DoH, ANG y MRX) ; y 2) aunque los algoritmos basados en PID son efectivos para resolver el problema de control, éste no ha sido utilizado de forma multivariable para la perfusión de múltiples fármacos utilizando múltiples variables fisiológicas. En relación con la presente invención se han encontrado los siguientes documentos del estado de la técnica: - ES2297940T3 (2001) , Aparato para proporcionar a un paciente consciente alivio del dolor y la ansiedad asociados con procedimientos médicos o quirúrgicos. Se reivindica un sistema para proporcionar, a través de una gestión conservadora de equipo lógico informático, la entrega de uno o más fármacos amnésicos, analgésicos o sedantes con la monitorización electrónica de una o más condiciones fisiológicas del paciente. - CN1561241B (2002) , Apparatuses and methods for titrating drug deliver y . Se reivindica un sistema de suministro de fármacos a un paciente, en el que dicho sistema comprende: una interfaz de usuario para recibir información del usuario, un dispositivo de suministro de fármacos y un monitor fisiológico regulado por un algoritmo. - US8998808B2 (2004) , System for identifying patient response to anesthesia infusion. Se reivindica un aparato para la asistencia a un profesional durante la administración de un fármaco para la anestesia en un paciente, que comprende: un sistema de procesamiento que recibe los datos correspondientes, una memoria que almacena los datos, un procesador que resuelve la fórmula y una pantalla que muestra los datos resultantes al especialista anestesista. - ES2293366T3 (2006) , Sistema de suministro de fármaco intravenoso controlado por ordenador. Se reivindica un aparato para controlar y dirigir una anestesia IV /o la aplicación de otros fármacos IVs a un paciente. Además, almacena los datos del experto beneficiario del sistema, siendo estos recuperables. - ES2267767 (2007) , System and method of adaptative drug deliver y . Se reivindica un Sistema para determinar y mantener un nivel de concentración de fármaco deseado en un paciente para determinar y mantener un efecto deseado sobre ese paciente. El sistema comprende un conjunto de sensores, una unidad de suministro de fármaco y un controlador en CL de suministro con una entrada acoplada a dicho conjunto y una salida acoplada a dicha unidad de suministro. - JP5792629B2 (2009) , System for controlling the means for injection of anesthetic or sedative agents. Se reivindica un sistema de control de anestesia IV para la inducción y mantenimiento de la sedación, el cual contiene los medios para la adquisición y análisis de la señal de control. - ES2429688 (2013) , Apparatuses and methods for titrating drug deliver y . Se reivindica un Sistema para proporcionar la entrega de fármaco a un paciente. Dicho Sistema comprende una interfaz de usuario, un dispositivo de entrega del fármaco, múltiples monitores fisiológicos y un procesador que integra la interfaz del usuario. - CN103212119B (2013) , Based on target-controlled infusion pump bis anesthesia feedback controller. Se reivindica un sistema de control en lazo cerrazo basado en BIS el cual contiene un algoritmo de control PID borroso. - CN106859592A (2015) , TCI-based (target controlled infusion based) anesthesia depth intelligent control system. Se reivindica un sistema de control TCI inteligente basado en la monitorización del BIS en anestesia. - US20180296759A1 (2016) , Methods and systems for closed-loop control of drug administration. Se reivindica un sistema de control en circuito cerrado para la administración de al menos un fármaco a un paciente, el sistema de control que contiene: un actuador que administra el fármaco, uno o más monitores fisiológicos y un procesador que determina la señal de control. Referente a lo anteriormente expuesto, se pueden encontrar invenciones que reivindican sistemas de control basados en un solo monitor, concretamente, BIS (CN103212119B y CN106859592A) ; otras, de entre los diferentes principales estados anestésicos se refieren únicamente a la sedación (JP5792629B2) . Una de las patentes más avanzadas reivindica un sistema para la perfusión de al menos un fármaco en base a uno o más monitores fisiológicos; sin embargo, dicha invención basa su control en el uso de un controlador de modelos predictivos (en inglés, Model Predictive Controller, MPC) en los que tampoco consta la atención a la sinergia que pueden presentar los fármacos empleados. No existe indicio alguno de que en la actualidad haya un sistema de bombas de perfusión que integre el método de multi-perfusión de fármacos anestésicos con control MIMO-PID aplicado en actos anestésicos vía IV, configurable a la cantidad de fármacos utilizados, a la cantidad de variables de monitorización que se utilicen y que considere la relación sinérgica existente entre los diferentes fármacos empleados. Adicionalmente, no existe indicio alguno de un método que contemple la multi-perfusión de otros tipos de fármacos diferentes a los empleados en anestesia. DESCRIPCIÓN DE LA INVENCIÓN Para ayudar a comprender el método que se ejecuta en un sistema electrónico, inicialmente se presentan los listados con los nombres y su significado de abreviaturas, variables y sistemas. Con las abreviaturas se simplifican nombres largos que aparecen con mucha frecuencia en el texto, con este listado se favorece la comprensión de la lectura hasta la familiarización de los conceptos por parte del lector (si el acrónimo refiere a un nombre en plural este terminará con "s", por ejemplo "IV" se refiere a intravenoso e "IVs" se refiere a intravenosos) . A continuación, se relacionan las abreviaturas por orden alfabético: Abreviatura Significado A Analgesia C (Closed-loop) lazo cerrado D Derivativo D (Depth ofHypnosis) profundidad hipnótica e (Bispectral Index) índice biespectral o monitor equivalente de hipnosis e (Neuromuscular Blockade Index) o monitor equivalente de relajación muscular e (Noxious Stimulation Response Index) o monitor equivalente de nocicepción e Propofol o fármaco equivalente con propiedades hipnóticas e Rocuronio o fármaco equivalente con propiedades de bloqueo muscular e Remifentanilo o fármaco equivalente con propiedades analgésicas I Integral IP (Induction phase) fase de inducción IV Intravenoso o Intravenosa M Sistema controlador PID de múltiple entrada y múltiple salida M Sistema controlador PID de múltiple entrada y salida única MPh (Maintenance phase) fase de mantenimiento MR (Muscle relaxation) relajación muscular OL (Open- loop) lazo abierto P Proporcional PID Sistema controlador Proporcional, Integral y Derivativo RPh (Recover y phase) fase de recuperación SIS Controlador PID de simple entrada y simple salida Syn Controlador MIMO-PID con sinergia Con el listado de variables se pretende que el lector tenga una rápida y fácil familiarización con sus nombres, conceptos que definen y su ubicación en las figuras. Las variables referenciadas en negrita y entre [corchetes] definen matrices, las referenciadas solo en n egrita definen vectores columna (se realiza una transposición para facilitar su escritura e interpretación) , las referenciadas en itática y sin negrita definen variables escalares . A continuación, se relacionan las más importantes según el orden de aparición en la desc cripción: Nombre Definición de la variable y Vector de variables de monitorización (6) yi Monitor eBIS (6.1) Y2 Monitor eNOX (6.2) ys Monitor eNMB (6.3) Upt Vector de perfusión continua de fármacos anestésicos (5) Uptl Perfusión continua del ePPF (5.1) Upt2 Perfusión continua del eRMF (5.2) Upt3 Perfusión continua del eRCN (5.3) dsur Vector de actuaciones quirúrgicas (7) Uol Vector de perfusiones del protocolo manual (4) u0n Perfusión manual del ePPF (4.1) Uoí2 Perfusión manual del eRMF (4.2) Uol3 Perfusión manual del eRCN (4.3) d Vector de bolos manuales al inicio di Bolo manual ePPF Ó2 Bolo manual eRMF ds Bolo manual eRCN D Vector que contiene los bolos por unidad de masa de inducción Di Dosis ePPF D2 Dosis eRMF Ds Dosis eRCN rol Vector de perfusión de la IPh r0ti Perfusión de inducción de ePPF r0i2 Perfusión de inducción de eRMF r0i3 Perfusión de inducción de eRCN R Vector de perfusión constante en IPh Ri Perfusión constante de ePPF r 2 Perfusión eonstante de eRMF r 3 Perfusión eonstante de eRCN p Veetor de la disminueión de la perfusión en MPh P l Disminueión de perfusión ePPF P 2 Disminueión de perfusión eRMF P 3 Disminueión de perfusión eRCN w Peso del paeiente yx Veetor de objetivos de las variables monitorizadas (8) Yt i Objetivo sobre el eBIS (8.1) Yt 2 Objetivo sobre el eNOX (8.2) Yt 3 Objetivo sobre el eNMB (8.3) yf Veetor de variables filtradas de monitorizaeión (10) Y f i Filtrado del eBIS (10.1) Y f 2 Filtrado del eNOX (10.2) Y f 3 Filtrado del eNMB (10.3) fe Veetor de freeueneias de eorte fl Freeueneia de eorte del filtro eBIS f 2 Freeueneia de eorte del filtro eNOX f 3 Freeueneia de eorte del filtro eNMB N Coefieiente de filtrado PID ei Veetor de error de eontrol del eBIS (12) e p i eBIS proporeional (12.1) 6/1 eBIS integral (12.2) e D 1 eBIS derivativo e F1 eBIS derivativo filtrado (12.3) e2 Veetor de error de eontrol del eNOX (13) e P 2 eNOX proporeional (13.1) e / 2 eNOX integral (13.2) e D 2 eNOX derivativo e F 2 eNOX derivativo filtrado (13.3) e3 Veetor de error de eontrol del eNMB (14) e P 3 eNMB proporeional (14.1) e /3 eNMB integral (14.2) e D 3 eNMB derivativo e F 3 eNMB derivativo filtrado (14.3) ep Veetor de errores asimétrieos proporeionales epi eBIS proporcional (12.1) ep2 eNOX proporcional (13.1) ep3 eNMB proporcional (14.1) ei Vector de errores simétricos integrales en eBIS integral (12.2) el2 eNOX integral (13.2) el3 eNMB integral (14.2) eo Vector de errores asimétricos derivativos eD1 eBIS derivativo eD2 eNOX derivativo eD3 eNMB derivativo eF Vector de errores asimétricos derivativos filtrados eFi eBIS derivativo filtrado (12.3) eF2 eNOX derivativo filtrado (13.3) eF3 eNMB derivativo filtrado (14.3) [B] Matriz de asimetría en la acción proporcional P Vector de asimetría en la acción proporcional Pii Ponderación eBIS P22 Ponderación eNOX P33 Ponderación eNMB ythb Vector de umbrales que determinan el valor máximo de p ythbl Umbral p eBIS ythb2 Umbral p eNOX ythb3 Umbral p eNMB [G] Matriz de asimetría en la acción derivativa 1 Vector de asimetría en la acción derivativa 7ii Ponderación eBIS Y22 Ponderación eNOX /33 Ponderación eNMB ythg Vector de umbrales que determinan el valor máximo de 1 ythg1 Umbral 1 eBIS ythg2 Umbral 1 eNOX ythg3 Umbral 1 eNMB Up¡d Vector de perfusiones de control (15) Ui Perfusión de control de ePPF (15.1) u2 Perfusión de control de eRMF (15.2) U3 Perfusión de control de eRCN (15.3) [KP] Matriz de ganancias proporcionales KP Vector de ganancias proporcionales directas Kp¡ Vector de ganancias proporcionales relativo al fármaco i Ganancia proporcional relativa monitor j y al fármaco i [K, ] Matriz de ganancias integrales K, Vector de ganancias integrales directas K, ¡ Vector de ganancias integrales relativo al fármaco i Km Ganancia integral relativa monitor j y al fármaco j y monitor j [T, ] Matriz de tiempos de acción integral T, Vector de tiempos de acción integral directos T, ¡ Vector de tiempos de acción integral relativo al fármaco i T, j Tiempo de acción integral relativa monitor j y al fármaco i [Kd ] Matriz de ganancias derivativas k d Vector de ganancias derivativas directas Kd ¡ Vector de ganancias derivativas relativo al fármaco i Ganancia derivativa relativa monitor j y al fármaco i [Td ] Matriz de tiempos de acción derivativa Td Vector de tiempos de acción derivativa directos Td ¡ Vector de tiempos de acción derivativa relativo al fármaco i Td íj Tiempo de acción derivativa relativa monitor j y al fármaco i [SYN] Matriz de sinergia de fármacos s¡ Vector de sinergias relativa al fármaco i Su Sinergia relativa al controlador C K0i Vector de ganancias sobre el vector de perfusiones del protocolo manual Km Ganancia que modula la perfusión del protocolo manual relativa al ePPF Ko I2 Ganancia que modula la perfusión del protocolo manualrelativa al eRMF Ko í3 Ganancia que modula la perfusión del protocolo manualrelativa al eRCN Ucr Vector de corrección (18) UCr1 Perfusión correctora del ePPF (18.1) UCr2 Perfusión correctora del eRMF (18.2) Uc r3 Perfusión correctora del ePPF (18.3) Yl o Vector de umbrales inferiores de activación de la corrección L i Umbral inferior relativo al eBIS - 2 Umbral inferior relativo al eNOX L3 Umbral inferior relativo al eNMB Yhi Vector de umbrales superiores de activación de la corrección Hi Umbral superior relativo al eBÍS h 2 Umbral superior relativo al eNOX H3 Umbral superior relativo al eNMB Usf Vector de control fiable (20) Usf1 Perfusión fiable del ePPF (20.1) Usf2 Perfusión fiable del eRMF (20.2) Usf3 Perfusión fiable del eRCN (20.3) Ulo Vector de límites inferiores de la perfusión de fármacos uLi Límite inferior relativa al ePPF U¡_2 Límite inferior relativa al eRMF UL3 Límite inferior relativa al eRCN Uhi Vector de límites superiores de la perfusión de fármacos UH1 Límite superior relativa al ePPF UH2 Límite superior relativa al eRMF UH3 Límite superior relativa al eRCN UC| Vector de perfusiones automáticas (22) UC\1 Perfusión automática del ePPF (22.1) UCI2 Perfusión automática del eRMF (22.2) Uc\3 Perfusión automática del eRCN (22.3) umn Vector de resoluciones del sistema de bombas de perfusión continua Umn1 Resolución de la bomba del ePPF Umn2 Resolución de la bomba del eRMF Umn3 Resolución de la bomba del eRCN ti Tiempo de inicio de la ÍPh tm Tiempo de inicio de la Mph tr Tiempo de comienzo de la RPh Ts Tiempo de ejecución del método [ ]' Trasposición de vectores y matrices Con el listado de sistemas se pretende una rápida y fácil ubicación de los mismos tanto en las figuras como en su descripción. A continuación, se relacionan según el orden de aparición en la descripción: Sistema Subsistema (1) paciente (2.1) bomba de perfusión del fármaco hipnótico (ePPF) (2) sistema de bombas (2.2) bomba de perfusión del fármaco analgésico (eRMF) de perfusión (2.3) bomba de perfusión del fármaco relajante (eRCN) (3.1) monitor de la DOH (eBIS) (3) equipos de (3.2) monitor de la ANG (eNOX) monitorización (3.3) monitor de la MRX (eNMB) (24) sistema de control multi-PID con sinergia (SynPlD) (9.1) filtro de la hipnosis (9) banco de filtros (9.2) filtro de la nocicepción (9.3) filtro de la relajación muscular 28: generador de error de la DoH (11) generador de 29: generador de error de la ANG errores de control 30: generador de error de la MRX (16) controlador multivaria ble y con sinergia MIMO-PID, denotado por la matriz [PID] (25) subsistema de (25.1) SISO-PID eBIS-ePPF, denotado por la variable C11 control MISO-PID-ePPF, (25.2) SISO-PID eNOX-ePPF, denotado por la variable C12 denotado por el vector (25.3) SISO-PID eNMB-ePPF, denotado por la variable C13 Cl (26) subsistema de (26.1) SISO-PID eBIS-eRMF, denotado por la variable C2i control MISO-PID-eRMF, (26.2) SISO-PID eNOX-eRMF, denotado por la variable C22 denotado por el vector (26.3) SISO-PID eNMB-eRMF, denotado por la variable C23 C2 (27) subsistema de (27.1) SISO-PID eBIS-eRCN, denotado por la variable C31 control MISO-PID-eNMB, (27.2) SISO-PID eNOX-eRCN, denotado por la variable C32 denotado por el vector (27.3) SISO-PID eNMB-eRCN, denotado por la variable C33 C3 (19.1) subsistema de seguridad de la infusion del ePPF (19) sistema de (19.2) subsistema de seguridad de la infusion del eRMF seguridad (19.3) subsistema de seguridad de la infusion del eRCN (21.1) subsistema cuantificador de la infusion del ePPF (21) sistema (21.2) subsistema cuantificador de la infusion del eRMF cuantificador (21.3) subsistema cuantificador de la infusion del eRCN (23) sistema de conmutación La presente invención se refiere a un sistema para la multi-perfusión automática de fármacos con sinergia a pacientes por IV, que comprende: - un subsistema de bombas de perfusión (2) , configurado para suministrar al paciente (1) una cantidad de fármacos; - un subsistema de monitorización (3) , configurado para medir un conjunto de variables fisiológicas con información del estado del paciente; - un subsistema de control (24) , configurado para adaptar la cantidad suministrada de cada fármaco (5) por el subsistema de bombas de perfusión (2) , basado en una cantidad de perfusión inicial predeterminada (4) , unos valores objetivo de monitorización (8) , una realimentación (6) de las variables fisiológicas medidas y una sinergia entre los fármacos, donde el subsistema de control comprende: o un módulo generador de errores de control (11) configurado para calcular errores (12, 13, 14) basado en los valores objetivo de monitorización (8) y la realimentación de las variables fisiológicas medidas; o un controlador (16) configurado para determinar una perfusión de control (15) para cada uno de los fármacos basada en los errores (12, 13, 14) calculados por el módulo generador de errores de control (11) y la cantidad de perfusión inicial predeterminada (4) ; o un módulo de corrección (17) configurado para recibir las medidas del conjunto de variables fisiológicas desde el subsistema de monitorización (3) y modificar la perfusión de control (15) del controlador (16) , incrementando en función de un umbral superior o disminuyendo en función de un umbral inferior, dicha perfusión para conducir las variables fisiólogicas a un rango seguro preestablecido para las variables fisiológicas; y o un módulo de seguridad (19) configurado para recibir la perfusión de control (15) de cada fármaco y modificar dicha perfusión limitándola entre dos valores de perfusión, un límite inferior y otro límite superior, que aseguran la no hipermedicación para cada fármaco, lo que permite trabajar a las variables fisiológicas en un rango serguro. Adicionalmente, se contemplan en el subsistema de control unos modulos de protección frente a sobredosificación o infradosificación con los módulos de seguridad (19) y corrección (17) configurados para mantener la perfusión de fármacos en unos valores seguros. En una de las realizaciones de la invención, se divulga un sistema de multi-perfusión con sinergia de fármacos anestésicos con sinergia mediante control en CL MIMO-PID (SynPlD) aplicado en actos anestésicos vía IV, este sistema es multidimensional configurable a la cantidad de fármacos utilizados y configurable a la cantidad de variables de monitorización que se utilicen. El sistema se implementa en un dispositivo electrónico, donde se ejecutan los siguientes pasos: paso 1.- obtener un vector de variables de monitorización de hipnosis (DoH) , analgesia (ANG) y relajación muscular (MRX) , adicionalmente otras variables de monitorización pueden ser usadas. De ahora en adelante se refiere a ellos como vector de variables de monitorización (6) que pueden ser el BIS, NOX y NMB u otros monitores equivalentes denotados como eBIS, eNOX y eNMB, de la DoH, ANG y MRX, respectivamente. El valor del vector de variables de monitorización (6) depende principalmente de la perfusión de los fármacos con propiedades hipnóticas, analgésicas y /o bloqueantes musculares, como son el propofol (PPF) , el remifentanilo (RMF) y el rocuronio (RCN) , aunque fármacos equivalentes pueden ser usados denotados como ePPF, eRMF y eRCN, adicionalmente otros fármacos anestésicos pueden ser usados. De ahora en adelante se refiere a ellos como como fármacos o drogas anestésicas que se infusionan al paciente vía IV; estos conforman el vector de perfusión de fármacos anetstésicos (5) . El vector de perfusión de fármacos anestésicos (5) se administra al paciente (1) mediante un sistema de bombas de perfusión (2) . Los equipos de monitorización (3) recogen sobre el paciente (1) los efectos de los fármacos anestésicos y el vector de actuaciones quirúrgicas (7) del médico cirujano en una intervención; paso 2.- para los fármacos anestésicos considerados, calcular el vector de perfusión de fármacos anestésicos (5) mediante un sistema de control MIMO-PID on sinergia (SynPlD) (24) a partir del vector de variables de monitorización (6) , del vector de perfusiones del protocolo manual (4) y del vector de objetivos de las variables monitorizadas (8) ; paso 3.- proceder a la limpieza de ruido y artefactos del vector de variables de monitorización (6) mediante un banco de filtros (9) para obtener un vector de variables filtradas de monitorización (10) ; paso 4.- calcular los vectores de errores de control (12, 13, 14) mediante un generador de errores de control (11) a partir del vector de variables filtradas de monitorización (10) y del vector de objetivos de las variables monitorizadas (8) ; particularmente consiste en calcular el vector de error de control del monitor eBIS (12) mediante un generador de error de la DoH (28) a partir de la monitorización filtrada de la hipnosis mediante el monitor eBIS (10.1) y de su valor objetivo (8.1) ; calcular el vector de error de control del monitor eNOX (13) mediante un generador de error de la ANG (29) a partir de la monitorización filtrada de la ANG mediante el monitor eNOX (10.2) y de su valor objetivo (8.2) ; calcular el vector de error de control del monitor eNMB (14) mediante un generador de error de la RMX (30) a partir de la monitorización filtrada de la MRX mediante el monitor eNMB (10.3) y de su valor objetivo (8.3) ; paso 5.- calcular un vector de perfusiones de control (15) mediante un controlador multivariable y con sinergia MIMO-PID (16) , compuesto por tres subsistemas de control MISO-PID (25, 26, 27) a partir de los vectores de errores de control (12, 13, 14) y del vector de perfusiones del protocolo manual (4) . Cada perfusión de control PID está formada por la suma de una perfusión proporcional, una perfusión integral y una perfusión derivativa. paso 6.- calcular un vector de corrección (18) mediante un sistema corrector de perfusiones (17) a partir del vector de variables filtradas de monitorización (10) ; paso 7.- calcular un vector de control fiable (20) mediante un sistema de seguridad (19) a partir del vector de perfusiones de control (15) y del vector de corrección (18) ; paso 8.- calcular un vector de perfusiones automáticas (22) mediante un sistema cuantificador (21) a partir del vector de control fiable (20) ; paso 9.- definir el vector de perfusión de fármacos anestésicos (5) aplicado al paciente (1) mediante un sistema de conmutación (23) a partir del vector de perfusiones del protocolo manual (4) y del vector de perfusiones automáticas (22) calculadas por el sistema de control SynPID (24) ; paso 10.- calcular la perfusión de control del fármaco ePPF (15.1) mediante un subsistema de control MISO-PID-ePPF (25) compuesto de tres controladores SISO-PID (25.1, 25.2, 25.3) que relacionan la perfusión del fármaco ePPF con los vectores de errores de control (12, 13, 14) ; paso 11.- calcular la perfusión de control del fármaco eRMF (15.2) mediante un subsistema de control MISO-PID-eRMF (26) compuesto de tres controladores SISO-PID (26.1, 26.2, 26.3) que relacionan la perfusión del fármaco eRMF con los vectores de los errores de control (12, 13, 14) ; paso 12.- calcular la perfusión de control del fármaco eRCN (15.3) mediante un subsistema de control MISO-PID-eNMB (27) compuesto de tres controladores SISO-PID (27.1, 27.2, 27.3) que relacionan la perfusión del fármaco eRCN con los vectores de los errores de control (12, 13, 14) . El sistema de multi-perfusión de fármacos anestésicos con sinergia mediante control en CL MIMO-PID aplicado en actos anestésicos vía IV es denominado sistema de control SynPID. SynPID necesita varios tipos de información para obtener el vector de perfusión de fármacos anestésicos (5) sobre los pacientes, a continuación se detallan las acciones y cálculos que hay que hacer en cada paso descrito anteriormente. El paso 2) ejecutado por el sistema de control SynPID adicionalmente comprende adquirir la información: 2.1.- Medir el vector de variables de monitorización (6) , Donde y es el vector de variables de monitorización (6) ; y? es el monitor eBIS; y2 es el monitor eNOX; y3 es el monitor eNMB y el resto de componentes del vector desde y4 a yr son otras posibles incorporaciones de monitores. El superíndice T significa transposición del vector. 2.2.- Definir el vector de perfusiones del protocolo manual (4) conocido como protocolo médico manual en lazo abierto (OP) , u =\u u u í [Z2] Donde uo es el vector de perfusiones del protocolo manual (4) ; uol? es la perfusión del protocolo manual para el ePPF; uol2 es la perfusión del protocolo manual para el eRMF; uol3 es la perfusión del protocolo manual para el eRCN y el resto de componentes del vector desde uol4 a uols son otras posibles decisiones de otros fármacos incorporados al sistema. 2.3.- Calcular el vector de perfusiones del protocolo manual (4) en OP, uol (0 = d (, -) + rol ( / ) , [2. 3] 2.3.1.- Donde d es el vector de bolos manuales en el momento de iniciarse el IPh en el tiempo t, D = [A D2 ... D, ] \ Donde D es el vector que contiene los bolos por unidad de masa de cada fármaco; W es el peso del paciente y Ts es el periodo de ejecución. 2.3.2.- Donde ro es el vector de perfusión de los fármacos anestésicos en IPh, r nx [2. 5] R = K r 2 - RA . p = [^i r 2 - p.Y ' Donde R es el vector de perfusión constante en IPh, desde t¡ donde comienza la IPh hasta tm donde comienza la MPh de la anestesia; P es el vector de la disminución de la perfusión en MPh; y W es el peso del paciente. 2.4.- Fijar el vector de objetivos de las variables monitorizadas (8) , y-r = [j-Vi y-n ••• Err] 1 ^ ^ Donde yT es el vector de objetivos de las variables monitorizadas (8) ; yT1 es el objetivo sobre el monitor eBIS; y2 es el objetivo sobre el monitor eNOX; y3 es el objetivo sobre el monitor eNMB y el resto de componentes del vector desde y4 a yr son otros posibles objetivos sobre las nuevas incorporaciones de monitores al método. El paso 3) ejecutado en el sistema de control SynPID adicionalmente comprende un banco de filtros (9) para: 3.1.- Calcular el vector de variables filtradas de monitorización (10) , Donde yf es el vector de variables filtradas de monitorización; yf1 es el filtrado del monitor eBIS; yf2 es el filtrado del monitor eNOX; yf3 es el filtrado del monitor eNMB y el resto de componentes del vector desde yf4 a yfr son los filtrados sobre las nuevas incorporaciones de monitores al sistema. 3.2.- Definir un banco de filtros (9) , basados en filtros paso bajo de orden nH, Donde y es el vector de variables de monitorización (6) ; yf es el vector de variables filtradas de monitorización (10) ; nH es el orden del filtro; fc es el vector de frecuencias de corte del banco de filtros (9) dada por, fc = [ /i Z2 /, f [3. 3] Donde fc es el vector de frecuencias de corte; f1 es la frecuencia de corte del filtro eBIS; f2 es la frecuencia de corte del filtro eNOX; f3 es la frecuencia de corte del filtro eNMB y el resto de componentes del vector desde f4 a fr son las frecuencias de corte del sistema de limpieza sobre las nuevas incorporaciones de filtros al sistema. El vector fc se calcula mediante la ecuación, fC = r *yíL . [3.4] A n Donde N es el coeficiente de filtrado PID; y TD es el vector de tiempos de acción derivativa directo. El paso 4) ejecutado en el sistema de control SynPlD adicionalmente comprende un generador de errores de control (11) para: 4.1.- Calcular un vector de error de control del monitor eBIS e1 (12) con el generador de error de la DoH (28) , un vector de error de control del monitor eNOX e2 (13) con el generador de error de la ANG (29) , y un vector de error de control del monitor eNMB e3 (14) con el generador de error de la RMX (30) , cada uno con sus componentes proporcional, integral y derivativa (12.1, 12.2, 12.3) , (13.1, 13.2, 13.3) y (14.1, 14.2, 14.3) . Los errores correspondientes desde e4 a er son los relativos a los nuevos monitores incorporados al sistema de control, e1 [ep1 ej 1 eF1 ]T [4. 1] el 2 eF 2 ] er [ePi eír e» ]T Donde eP¡ se refiere al error asimétrico proporcional del PID; e¡ se refiere al error simétrico integral del PID; eF¡ se refiere al error derivativo filtrado del PID; y ¡ se refiere a un número entero comprendido entre 1 y r, para referenciar a la variable monitorizada. 4.2.- Calcular los errores asimétrico proporcional, simétrico integral y asimétrico derivativo de cada controlador SISO-PID, utilizando el vector yf de variables filtradas de monitorización (10) y el vector yT de objetivos de las variables monitorizadas (8) , Donde yT es el vector de objetivos de las variables monitorizadas (8) ; yf es el vector de variables filtradas de monitorización (10) ; I es la matriz identidad; Td es el vector de tiempos de acción derivativa directo y N es el coeficiente de filtrado PID. 4.2.1.-[B] es la matriz con la influencia del "weighting set point en la acción proporcional de los PIDs, se conoce también como la asimetría en el error proporcional, Donde f3¡¡ es el peso sobre el target de la acción proporcional j, thb + 2, y f < y [4. 4] t y t - y thb i, y f ^ y t Donde ythb es un vector de umbrales que determinan el valor máximo de p. 4.2.2.- G es la matriz con la influencia del "weighting set point en la acción derivativa de los PIDs; se conoce también como la asimetría en el error derivativo, Donde y¡¡ es el peso sobre el target de la acción derivativa j, -y f - y % +2 yf < y [4. 6] hg t y = í y T-yt 1» y f ^ y t Donde ythg es un vector de umbrales que determinan el valor máximo de y. 4.3.- Calcular el vector de error de control del monitor eBIS (12) mediante un generador de error de la DoH (28) a partir de la monitorización filtrada de la DoH mediante el monitor eBIS (10.1) y de su valor objetivo (8.1) , ep\ = ~P \ i 'yYi+ y f\ e¡ i = - y T i + y f i [4. 7] e Di = ~ 7 n ' y n + y f l JD11 u CF1 e F1 ~ e D1 T de N dt 4.4.- Calcular el error de control del monitor eNOX (13) mediante un generador de error de la ANG (29) a partir de la monitorización filtrada de la ANG mediante el monitor eNOX (10.2) y de su valor objetivo (8.2) , 2 p 22-yT2 + y f 2 -12 _ yT2+ y/ 2 [4. 8] °D 2 Y 22 'Y t 2 Y f 2 T1 D 22 d ue CF 2 - F 2 ' e D 2 N dt 4.5.- Calcular el vector de error de control del monitor eNMB (14) mediante un generador de error de la MRX (30) a partir de la monitorización filtrada de la RMX mediante el monitor eNMB (10.3) y de su valor objetivo (8.3) , eP3= ~ A 3 y ti, + y f ?, ei 3 = "yT 3 + y/ 3 [4. 9] e D2 = _ ? 33 'y r 3 + y / 3 T1 D33 d ue CF 3 eF3 _ eD3 N dt El paso 5) ejecutado por el sistema de control SynPlD adicionalmente comprende un controlador multivariable y con sinergia MIMO-PID (16) para: 5.1.- Definir el vector de perfusiones de control (15) , Donde u1 es la perfusión de control del ePPF (15.1) ; u2 es la perfusión de control del eRMF (15.2) ; u3 es la perfusión de control del eRCN (15.3) y desde u4 a us las perfusiones de los nuevos fármacos que puedan incorporarse al sistema de control. 5.2.- Calcular el vector de perfusiones de control (15) mediante un controlador multivariable y con sinergia MIMO-PID (16) , los vectores de error de control de los monitores eBIS (12) , eNOX (13) y eNMB (14) y el vector de perfusiones del protocolo manual (4) , Up¡d = [ H D ]{S Y N ]+ K ol-uol, [5- 2] Donde: 5.2.1.- [PID] es la matriz de controladores SISO-PID que componen el controlador multivariable y con sinergia MIMO-PID (16) , Donde C¡¡ es el controlador SISO-PID relativo al monitor j y al fármaco /; Ci es el subsistema de control MISO-PID-ePPF; C2 es el subsistema de control MISO-PID-eRMF; y C3 es el subsistema de control MISO-PID-eNMB. Los C¡j están definidos por la matriz de ganancias proporcionales [KP]; la matriz de ganancias integrales [K|] y la matriz de ganancias derivativas [KD]: K p = diag ([Kp ]) [5. 7] K j = diag ([K j ]) [5. 8] K D = diag ([K D ]) [5. 9] Donde KP¡¡ es la ganancia proporcional relativa monitor j y al fármaco /; K\¡¡ es la ganancia integral relativa monitor j y al fármaco /; y KD¡¡ es la ganancia derivativa relativa monitor j y al fármaco /; KPi es el vector de ganancias proporcionales relativas al fármaco /; KIi es el vector de ganancias integrales relativas al fármaco /; KDi es el vector de ganancias derivativas relativas al fármaco /; KP es el vector de ganancias proporcionales directas relativas al fármaco j y al monitor j; KI es el vector de ganancias integrales directas relativas al fármaco j y l monitor j; y KD es el vector de ganancias derivativas directas relativas al fármaco j y al monitor _/'. 5.2.2.-[SYN] es la matriz de sinergia de fármacos: Donde S, y es la sinergia relativa al controlador Qf S¡ es el vector de sinergias relativa al fármaco /. 5.2.3.- Koi es un vector de ganancias sobre el vector de perfusiones del protocolo manual (4) , K , = [ K i Kn K ]T [5. 11] Donde K0/1 es la ganancia que modula la perfusión del protocolo manual del ePPF (4.1) ; K0/2 es la ganancia que modula la perfusión del protocolo manual del eRMF (4.2) ; K0/3 es la ganancia que modula la perfusión del protocolo manual del eRCN (4.3) y desde Ka/4 a Ka/S son las ganancias que modulan las perfusiones del protocolo manual de los nuevos fármacos que puedan incorporarse al sistema de control; Donde yT es el vector de objetivos de las variables monitorizadas (8) ; yf es el vector de variables filtradas de monitorización (10) e yLO es el vector de umbrales inferiores de activación de la corrección. 5.3.- Definir los subsistemas de control MISO-PID (25, 26, 27) a partir de los vectores de los errores de control (12, 13, 14) y del vector de perfusiones del protocolo manual (4) , «i Cn mSl! + Cn 'Sn + ... + Clr -Slr + Koñ -uon u2 C21 -S2l + C22~S22 +... + C2.- S2r + Ko¡2 -uol2 ^3] Donde C¡¡ es el controlador PID relativo al monitor ¡ y al fármaco /; S¡¡ es la sinergia relativa al controlador C¡¡; y K0u es la ganancia aplicada a las perfusiones del protocolo manual del fármaco u0/i. 5.3.1.- Definir cada controlador SISO-PID (25.1....... 27.3) mediante los vectores de los errores de control (12, 13, 14) y las ganancias definidas en el paso 5.2.1, Cy = P y + /. y. + D. y. ' [5. 14] Donde / identifica el fármaco (15.i) y ¡ identifica el monitor (10.j) ; P¡¡ es la acción proporcional, l¡¡ es la acción integral y D¡¡ es la acción derivativa. 5.3.2.- Calcular la acción proporcional, integral y derivativa; P y ~ K Pij 'e Pj íy = K n j\e, jdT, [5. 15] deFi D =^ D r - d f Donde KP¡¡ es la ganancia proporcional asociada al medicamento / y al monitor¡; eP¡ el error proporcional relativo al monitor¡; K¡¡ la ganancia integral asociada al medicamento / y al monitor; e¡ el error integral relativo al monitor ¡; Kd¡¡ la ganancia derivativa asociada al medicamento / y al monitor; y eF¡ el error derivativo filtrado relativo al monitor ¡. El paso 6) ejecutado por el sistema de control SynPlD adicionalmente comprende un sistema corrector de perfusiones (17) para: 6.1.- Definir el vector de corrección (18) , ucr = \ Lu cr , 1 u cr .2 ... u crs 1 JT, [6- 1] Donde ucr1 es la perfusión correctora del fármaco ePPF (18.1) ; ucr2 es la perfusión correctora del fármaco eRMF (18.2) ; ucr3 es la perfusión correctora del fármaco eRCN (18.3) ; y el resto de componentes del vector desde ucr4 a ucrs son otras posibles correcciones de otros fármacos incorporados al sistema. 6.2.- Calcular el vector de corrección (18) a partir del vector de variables filtradas de monitorización (10) , Donde [KP] es la matriz de ganancias proporcionales, ecuación [5. 4]; [SYN] es la matriz de sinergia, ecuación [5. 10]; yf es el vector de variables filtradas de monitorización (10) . 6.2.1.- yHi es el vector de umbrales superiores de activación de la corrección, H 2 ... H r f [6.3] Donde H1 es el umbral superior relativo al monitor eBIS; H2 es el umbral superior relativo al monitor eNOX; H3 es el umbral superior relativo al monitor eNMB; y el resto de componentes de los vectores desde H4 hasta Hr son los umbrales superiores de otras posibles incorporaciones de monitores al sistema. 6.2.2.- yLO es el vector de umbrales inferiores de activación de la corrección, y lo = [A h ... l , ] 1 I6- 4! Donde L1 es el umbral inferior relativo al monitor eBIS; L2 es el umbral inferior relativo al monitor eNOX; L3 es el umbral inferior relativo al monitor eNMB; y el resto de componentes de los vectores desde L4 hasta Lr son los umbrales inferiores de otras posibles incorporaciones de monitores al sistema. El paso 7) del sistema de control SynPlD adicionalmente comprende de un sistema de seguridad (19) para: 7.1.- Definir el vector de control fiable (20) , Donde usf1 es la perfusión fiable del fármaco ePPF (20.1) ; usf2 es la perfusión fiable del fármaco eRMF (20.2) ; usf3 es la perfusión fiable del fármaco eRCN (20.3) ; y el resto de componentes del vector desde usf4 a usfs son otras posibles perfusiones fiables de otros fármacos incorporados al sistema. 7.2.- Calcular el vector de control fiable (20) a partir del vector de perfusiones de control (15) y del vector de corrección (18) , UHI Upid + Ucr ^ UHI « s f = f u pid ^ U cr ? U LO < U pid + U cr ^ U HI [1] [7.2] ULO Upid + Ucr ^ ULO Donde ucr es el vector de corrección (18) y up¡d es el vector de perfusiones de control (15) . 7.2.1.- uHi es el vector de límites superiores de la perfusión de fármacos, Donde uH1 es límite superior de la perfusión relativa al fármaco ePPF; uH2 es límite superior de la perfusión relativa al fármaco eRMF; uH3 es límite superior de la perfusión relativa al fármaco eRCN; y el resto de componentes de los vectores desde uH4 hasta uHs son los límites superiores de las perfusiones relativas a otras posibles incorporaciones de fármacos al sistema. 7.2.2.- Ulo es el vector de límites inferiores de la perfusión de fármacos, ULO [«L1 *L2 «l r [1] [7. 4] Donde uL1 es el límite inferior de la perfusión relativa al fármaco ePPF; uL2 es el límite inferior de la perfusión relativa al fármaco eRMF; uL3 es el límite inferior de la perfusión relativa al fármaco eRCN; y el resto de componentes de los vectores desde uL4 hasta uLs son los límites inferiores de las perfusiones relativas a otras posibles incorporaciones de fármacos al sistema. El paso 8) ejecutado por el sistema de control SynPiD adicionalmente comprende un sistema cuantificador (21) para: 8.1.- Definir el vector de perfusiones automáticas (22) , Ucl= k /1 Ucl2 ••• UclS Í> [8' 1] Donde uc11 es la perfusión automática del fármaco ePPF (22.1) ; uc2 es la perfusión automática del fármaco eRMF (22.2) ; uc3 es la perfusión automática del fármaco eRCN (22.3) ; y el resto de componentes del vector desde uc4 a ucs son otras posibles perfusiones automáticas en CL de otros fármacos incorporados al sistema. 8.2.- Calcular el vector de perfusiones automáticas (22) a partir del vector de control fiable (20) , Donde usf es el vector de control fiable (20) y umn es el vector de resoluciones del sistema de bombas de perfusión continua (2) ; 8.2.1.- umin es el vector de resoluciones de cada bomba de perfusión de fármacos; [8. 3] U mu \Umn 1 Donde umn1 es resolución bomba de perfusión ePPF; umn2 es resolución bomba de perfusión eRMF; umn3 es la resolución bomba de perfusión eRCN; y el resto de componentes del vector desde umn4 a umns son las resoluciones de otras posibles bombas de perfusión de nuevos fármacos incorporados al sistema de control. El paso 9) ejecutado por el sistema de control SynPlD adicionalmente comprende un sistema de conmutación (23) para: 9.1.- Definir el vector de perfusión de fármacos anestésicos (5) , U p t = [ * V l U P'2 • • • « J > [ 9 ' ^ Donde uptí es la perfusión del fármaco ePPF (5.1) ; upt2 es la perfusión continua del fármaco eRMF (5.2) ; upt3 es la perfusión del fármaco eRCN (5.3) ; y el resto de componentes del vector desde upt4 a upts son otras posibles perfusiones de nuevos fármacos incorporados al sistema de control. 9.2.- Calcular el vector de perfusión de fármacos anestésicos (5) a partir del vector de perfusiones del protocolo manual (4) y el vector de perfusiones automáticas (22) , Donde uo es el vector de perfusiones del protocolo manual (4) ; ud es el vector de perfusiones automáticas (22) ; t¡ es el tiempo de inicio de la lPh; tm es el tiempo de inicio de la MPh; y tr es el tiempo de comienzo de la RPh. El paso 10) ejecutado por el sistema de control SynPlD adicionalmente comprende de un subsistema de control MlSO-PlD-ePPF (25) para: 10.1.- Definir el subsistema de control MlSO-PlD-ePPF (25) como un conjunto de controladores 10.2.- Calcular la perfusión de control del ePPF (15.1) ; a partir de los controladores SlSO-PlD (25.1, 25, .2, 25.3) , de los vectores de los errores de control (12, 13, 14) y de la perfusión de ePPF del protocolo manual (4.1) , ui C i ^ i + K0ii'U0ii [10. ul Cu mSl ¡ + C12 'Sl2 + • • • + Clr -Slr + K oñ uoll 2] Donde Si es un vector formado por la primera fila de [SYN]; Cy es el controlador PlD relativo al monitor ¡ y al fármaco ePPF; Sy es un vector formado por la sinergia relativa al controlador Cy; y Koy es la ganancia aplicada a la perfusión del protocolo manual del ePPF. El paso 11) ejecutado por el sistema de control SynPlD adicionalmente comprende de un subsistema de control MlSO-PlD-eRMF (26) para: 11.1.- Definir el subsistema de control MlSO-PlD-eRMF (26) como un conjunto de controladores 11.2.- Calcular la perfusión de control del eRMF (15.2) ; a partir de los controladores SlSO-PlD (26.1, 26, .2, 26.3) , de los vectores de los errores de control (12, 13, 14) y de la perfusión de eRMF del protocolo manual (4.2) , U 2 ~ C 2 * ^ 2 + Koi2 'UoI2 [1 1 .2 ] «2 C2l'S2l + C22 'S22 +... + C2.- S2r + Ko¡2 -uol2 Donde S2 es un vector formado por la segunda fila de [SYN]; C2¡ es el controlador PlD relativo al monitor j y al fármaco eRMF; S2y es un vector formado por la sinergia relativa al controlador C2¡; y K0 2 es la ganancia aplicada a la perfusión del protocolo manual del eRMF. El paso 12) ejecutado por el sistema de control SynPlD adicionalmente comprende de un subsistema de control MlSO-PlD-eNMB (27) para: 10.1.- Definir el subsistema de control MlSO-PlD-eNMB (27) como un conjunto de controladores SlSO-PlD, C . 1]3 = [C31 c [12 32 12.2.- Calcular la perfusión de control del eRCN (15.3) ; a partir de los controladores SISO-PID (27.1, 27, .2, 27.3) , de los vectores de los errores de control (12, 13, 14) y de la perfusión de eRCN del protocolo manual (4.3) , U3 C3 '83 + K0¡ 3 'Uol 3 [12.2] «3 = C3l ~S3l + C32 ~S32 +... + C3r ~S3r + K0¡3 nol3 Donde S3 es un vector formado por la tercera fila de [SYN]; C3¡ es el controlador PID relativo al monitor j y al fármaco eRCN; S3¡ es la sinergia relativa al controlador C3; y K03 es la ganancia aplicada a la perfusión del protocolo manual del eRCN. El paso 13) ejecutado por el sistema de control SynPlD adicionalmente puede comprender de varios controladores MISO-PID para nuevos fármacos: 13.1.- Definir el controlador MISO-PID para el fármaco i como un conjunto de controladores SISO-PID, C, [C, 1 c, 2 C 1' [13. 1] Donde i=4...s, identifica los nuevos fármacos; y r identifica el número de monitores. 13.2.- Calcular la perfusión de control del fármaco i; a partir de los controladores SISO-PID, de los errores de control y de la perfusión del fármaco i del protocolo manual (4.i) , u q - s, . + K i i U i i [13.2] En otro aspecto de la invención, se divulga un dispositivo de multi-perfusión de fármacos anestésicos con sinergia mediante control en CL MIMO-PID (SynPID) aplicado en actos anestésicos vía IV, este método es multidimensional configurable a la cantidad de fármacos utilizados y a la cantidad de variables de monitorización que se utilicen, en una cualquiera de las realizaciones del primer aspecto de la invención. El dispositivo de multi-perfusión de fármacos anestésicos con sinergia mediante control en CL MIMO-PID (SynPID) aplicado en actos anestésicos vía IV comprende al menos un banco de filtros (9) ; un generador de errores de control (11) ; un controlador multivariable y con sinergia MIMO-PID (16) ; un sistema corrector de perfusiones (17) ; un sistema de seguridad (19) ; un sistema cuantificador (21) ; y un sistema de conmutación (23) . El dispositivo de multi-perfusión de fármacos anestésicos con sinergia mediante control en CL MIMO-PID (SynPlD) aplicado en actos anestésicos vía IV puede ser un dispositivo electrónico o electromecánico. BREVE DESCRIPCIÓN DE LOS DIBUJOS Figura 1.- Muestra la topología del sistema de control SynPlD (24) en su forma más general en la que se detalla el paciente (1) , al que se le suministra el vector de perfusión de fármacos anestésicos (5) a través de un sistema de bombas de perfusión (2) y del que se extraen las medidas del vector de variables de monitorización (6) a través de los equipos de monitorización (3) . Las bombas de perfusión controlan los fármacos ePPF (2.1) , eRMF (2.2) y eRCN (2.3) . Los equipos de monitorización (3) recogen información de las siguientes variables: 1) DoH (3.1) mediante el monitor eBIS (6.1) ; 2) ANG (3.2) mediante el monitor eNOX (6.2) ; y 3) MRX (3.3) mediante el monitor eNMB (6.3) . El vector de variables de monitorización (6) es la base de realimentación del sistema de control SynPlD (24) , que además utiliza la información sobre: 1) el vector de objetivos de las variables monitorizadas (8) : target del eBIS (8.1) , target del eNOX (8.2) y target del eNMB (8.3) ; y 2) el vector de perfusiones del protocolo manual (4) : protocolo manual del ePPF (4.1) , protocolo manual del eRMF (4.2) y protocolo manual del eRCN (4.3) . Figura 2.- Muestra un detalle pormenorizado del sistema de control SynPID (24) que presenta como entradas los vectores de: 1) el vector de perfusiones del protocolo manual (4) ; 2) el vector de objetivos de las variables monitorizadas (8) ; y 3) los valores del vector de variables de monitorización (6) . El sistema de control SynPID (24) está compuesto por: 1) un banco de filtros (9) para obtener un vector de variables filtradas de monitorización (10) a partir del vector de variables de monitorización (6) ; el banco de filtros (9) está compuesto por tres filtros uno para limpiar y filtrar el eBIS (9.1) , otro para limpiar y filtrar el eNOX (9.2) y otro para limpiar y filtrar el eNMB (9.3) ; 2) un generador de errores de control (11) para obtener los vectores de los errores de control (12, 13, 14) a partir del vector de variables filtradas de monitorización (10) y del vector de objetivos de las variables monitorizadas (8) ; particularmente consiste en obtener el vector de error de control del monitor eBIS (12) ; obtener el vector de error de control del monitor eNOX (13) y obtener el vector de error de control del monitor eNMB (14) ; 3) un controlador multivariable y con sinergia MIMO-PID (16) para obtener un vector de perfusiones de control (15) a partir de los vectores de los errores de control (12, 13, 14) y del vector de perfusiones del protocolo manual (4) ; 4) un sistema corrector de perfusiones (17) para obtener un vector de corrección (18) a partir del vector de variables filtradas de onitorización (10) ; 5) un sistema de seguridad (19) obtener un vector de control fiable (20) a partir del vector de perfusiones de control (15) y del vector de corrección (18) ; 6) un cuantificador (21) para obtener un vector de perfusiones automáticas (22) a partir del vector de control fiable (20) ; y 7) un sistema de conmutación (23) para obtener el vector de perfusión de fármacos anestésicos (5) a partir del vector de perfusiones del protocolo manual (4) y del vector de perfusiones automáticas (22) . Figura 3.- Muestra un detalle pormenorizado del generador de errores de control (11) que presenta como entradas los vectores de: 1) el vector de objetivos de las variables monitorizadas (8) ; y 2) el vector de variables filtradas de monitorización (10) . El generador de errores de control (11) está compuesto por: 1) un generador de error de la DoH (28) donde se obtiene el vector de error de control del monitor eBIS (12) , donde se explicitan el error proporcional eBIS (12.1) , el error integral eBIS (12.2) y el error derivativo eBIS (12.3) , a partir de la monitorización filtrada de la DoH mediante el monitor eBIS (10.1) y de su valor objetivo (8.1) ; 2) un generador de error de la ANG (29) donde se obtiene el vector de error de control del monitor eNOX (13) , donde se explicitan el error proporcional eNOX (13.1) , el error integral eNOX (13.2) y el error derivativo eNOX (13.3) , a partir de la monitorización filtrada de la ANG mediante el monitor eNOX (10.2) y de su valor objetivo (8.2) ; y 3) un generador de error de la MRX (30) donde se obtiene el vector de error de control del monitor eNMB (14) , donde se explicitan el error proporcional eNMB (14.1) , el error integral eNMB (14.2) y el error derivativo eNMB (14.3) , a partir de la monitorización filtrada de la MRX mediante el monitor eNMB (10.3) y de su valor objetivo (8.3) . Figura 4.- Muestra un detalle pormenorizado del controlador multivariable y con sinergia MIMO-PID (16) que presentan como entradas los vectores de los errores de control (12, 13, 14) y del vector de perfusiones del protocolo manual (4) . El controlador multivariable y con sinergia MIMO-PID (16) está compuesto por varios subsistemas de control MISO-PID (25, 26, 27) que relacionan los vectores de los errores de control (12, 13, 14) con el vector de perfusiones de control (15) . Figura 5.- Muestra un detalle pormenorizado del controlador MISO-PID (25) relacionado con la perfusión del fármaco ePPF (15.1) que presenta como entradas los vectores de los errores de control (12, 13, 14) . El subsistema de control MISO-PID-ePPF (25) está compuesto por tres controladores SISO-PID que relacionan la perfusión del fármaco ePPF con: 1) el vector del error de control relativo al eBIS (12) mediante un controlador PID eBIS-ePPF (25.1) ; 2) el vector del error de control relativo al eNOX (13) mediante un ontrolador PID eNOX-ePPF (25.2) ; y 3) el vector del error de control relativo al eNMB (14) mediante un controlador PID eNMB-ePPF (25.3) . Figura 6.- Muestra un detalle pormenorizado del subsistema de control MISO-PID-eRMF (26) relacionado con la perfusión del fármaco eRMF (15.2) que presenta como entradas los vectores de los errores de control (12, 13, 14) . El subsistema de control MISO-PID-eRMF (26) está compuesto por tres controladores SISO-PID que relacionan la perfusión del fármaco eRMF con: 1) el vector del error de control relativo al eBIS (12) mediante un controlador PID eBIS-eRMF (26.1) ; 2) el vector del error de control relativo al eNOX (13) mediante un controlador PID eNOX-eRMF (26.2) ; y 3) el vector del error de control relativo al eNMB (14) mediante un controlador PID eNMB-ePPF (26.3) . Figura 7.- Muestra un detalle pormenorizado del subsistema de control MISO-PID-eNMB (27) relacionado con la perfusión del fármaco eRCN (15.3) que presenta como entradas los vectores de los errores de control (12, 13, 14) . El subsistema de control MISO-PID-eNMB (27) está compuesto por tres controladores SISO-PID que relacionan la perfusión del fármaco eRCN con: 1) el vector del error de control relativo al eBIS (12) mediante un controlador PID eBIS-eRCN (27.1) ; 2) el vector del error de control relativo al eNOX (13) mediante un controlador PID eNOX-eRCN (27.2) ; y 3) el vector del error de control relativo al eNMB (14) mediante un controlador PID eNMB-eRCN (27.3) . Figura 8.- Muestra un detalle pormenorizado de uno de los 9 controladores SISO-PID (C¡j) que componen el sistema de control SynPID (24) , cada controlador SISO-PID presenta como entradas los correspondientes errores proporcional (k.1) , integral (k.2) y derivativo (k.3) , relativo a cada componente de cada vector de error de control (ey) . Cada controlador SISO-PID se identifica con los subíndices ¡ que identifica el fármaco al que se está calculado la perfusión parcial, y j que identifica la procedencia del monitor. Así ¡'=1 identifica el PPF, ¡=2 el RMF e ¡=3 el RCN, j'=1 identifica el monitor BIS, j=2 el NOX y j'=3 el NMB, k=12 identifica el vector de error relativo al monitor BIS, k=13 el relativo al NOX y k=14 al NMB. DESCRIPCIÓN DETALLADA DE LA INVENCIÓN La presente invención aporta a la técnica varias estrategias de complemento al controlador PID en CL para que sea efectivo en el control en CL de la inducción y mantenimiento de la anestesia general, calculando la dosis de los fármacos ePPF, eRMF eRCN en base a un vector de errores de control. El control en CL es obtenido de forma novedosa por la consideración de la sinergia de los fármacos en el acto anestésico y por la realimentación de la información de monitorización de la DoH, ANG y MRX (otras variables pueden ser consideradas) mediante los monitores eBIS, eNOX y eNMB respectivamente (otros monitores pueden ser considerados) . Los cambios en los valores de los monitores son originados principalmente por el efecto de los fármacos y las actuaciones de la cirugía. Además, las perfusiones de los fármacos están condicionadas por un sistema de seguridad para salvaguardar la integridad física del paciente y están complementadas por un sistema de corrección de perfusiones que el PID clásico no posee. Presenta entre sus novedades la consideración de la sinergia entre los fármacos en un multicontrolador PID, asimetría en los errores de control, corrección de la perfusión por niveles excepcionalmente bajos o altos en los monitores, seguridad ante la sobreperfusión mediante limites fijos o variables de la perfusión de fármacos y mediante suspensión de las bombas, seguridad ante infraperfusión por condicionantes relacionados con la experiencia manual del anestesiólogo (protocolo manual OL) . Finalmente, la decisión final sobre las perfusiones se condiciona con un cuantificador para adecuar las perfusiones a las resoluciones de las bombas electromecánicas de perfusión. El objetivo final es realizar un cálculo automático de las perfusiones de ePPF, eRMF y eRCN que se aplicaría directamente a un paciente bajo cirugía con anestesia general, que sería el usuario final de la presente invención. La invención que se propone tiene entre sus novedades la definición de un nuevo sistema de perfusión de fármacos anestésicos con un sistema de control SynPlD, formado por un banco de filtros, un generador de errores asimétricos de control, un controlador MIMO-PID, un sistema de corrección, un sistema de seguridad y un sistema de cuantificación que pueda aplicarse al paciente bajo cirugía, pues tiene en cuenta: 1) la monitorización de la DoH, ANG y MRX mediante monitores eBIS, eNOX y eNMB; 2) las bombas de perfusión de los fármacos ePPF, eRMF y eRCN; y 3) el uso de un dispositivo electrónico que utilice un microprocesador y una memoria de almacenamiento. Adicionalmente, para estimar las perfusiones automáticas sobre el paciente el sistema de control en CL considera las perfusiones de fármacos previas en el momento de actuación y considera las medidas sobre los monitores actuales y pasadas. El sistema de perfusión continua de fármacos ePPF, eRMF y eRCN con sistema de control SynPlD es un método de control que requiere de la experiencia manual del anestesiólogo (protocolo manual OL) y está personalizado para cada paciente utilizando una variante del método empírico de ajuste de Cohen-Coon a través de las ganancias proporcional, integral y derivativa de cada controlador SISO-PID, del peso del paciente (W) , de su altura (H) , de su sexo (G) y de su masa muscular (MB) . El método de personalización se aplica durante la IPh de la anestesia general. El sistema de control SynPlD (24) propone el vector de perfusión de fármacos anestésicos (5) , como resultado de la aplicación del sistema de conmutación (23) , que inicialmente aplica el vector de perfusiones del protocolo manual (4) en la IPh, para conmutar al vector de perfusiones automáticas (22) en MPh y anular la perfusión en RPh. El sistema de control SynPlD (24) tiene como objetivo principal conducir al paciente (1) a un estado anestésico satisfactorio y fiable en función de: 1) el estado anestésico actual; 2) el vector de variables de monitorización (6) actual y/o pasados (histórico almacenado en la memoria) ; y 3) el vector de perfusión de fármacos anestésicos (5) de instantes pasados (histórico almacenado en la memoria) . La invención consiste en la propuesta de un sistema electrónico en el se ejecute un algoritmo de control realimentado definido por un sistema de control SynPlD (24) basado en un controlador multivariable y con sinergia MIMO-PID (16) que define el sistema de control multivariable para realizar el control de un estado anestésico fiable en pacientes (1) sometidos a cirugía bajo anestesia general. El sistema de control SynPID se implementa en un sistema basado en microprocesador con memoria seleccionado entre: "smartphones", "tablets", ordenadores personales, arduino, raspberr y -PI y un hardware específico para la ejecución del método o emplear el hardware propio de las bombas de perfusión para ejecutar la secuencia de instrucciones que implementarían el método de perfusión de fármacos en un sistema de control SynPID descrito en la presente invención. El sistema de perfusión de fármacos con sinergia mediante control en CL MIMO-PID (SynPID) aplicado en actos anestésicos vía IV de la presente invención difiere de los métodos del estado de la técnica basados en PIDs clásicos en al menos los siguientes aspectos: - El sistema de control SynPID utiliza tres fases de control controladas por el sistema de conmutación (23) : 1) IPh, eta fase correspondiente al inicio del acto nestésico y dura hasta conseguir un estado anestésico satisfactorio, durante este periodo solo el vector de perfusiones del protocolo manual (4) está aplicado al paciente (1) , el final de este periodo se utiliza para la personalización del sistema de control SynPlD (24) al paciente (1) ; 2) MPh, en esta fase es donde ocurre la cirugía y el objetivo del sistema de control SynPlD es mantener el estado anestésico satisfactorio, a pesar de los actos quirúrgicos; y 3) RPh, en esta fase se retiran las perfusiones de los fármacos para conseguir reanimar al paciente. - El sistema de control SynPlD utiliza un banco de filtros (9) para eliminar el ruido y los artefactos del vector de variables de monitorización (6) y obtener el vector de monitorización filtrado. El banco de filtros (9) está basado en una limpieza espectral y en la toma de decisiones en función de unas condiciones de monitorización. - El sistema de control SynPlD utiliza un generador de errores de control (11) relativos a los monitores eBIS, eNOX y eNMB que componen el vector de variables de monitorización (6) , los errores son asimétricos y están definidos por una modulación del vector de objetivos de las variables monitorizadas (8) y el vector de variables filtradas de monitorización (10) . El vector de actuaciones quirúrgicas (7) se reflejan en el paciente (1) a través de variaciones en el vector de variables de monitorización (6) . - El sistema de control SynPlD utiliza un vector de perfusiones de control (15) formado por perfusiones de los fármacos ePPF (15.1) , eRMF (15.2) y eRCN (15.3) . Cada perfusión de fármacos está definida por la acción de un sistema de control MlSO-PlD compuesta por la suma de tres acciones de control relativas a tres controladores SlSO-PlD. - La perfusión de ePPF (15.1) se calcula mediante la suma de: 1) un controlador SlSO-PlD (25.1) que relaciona una parte de la perfusión de control del ePPF con el vector de error de control del monitor eBlS (12) , formado por una componente proporcional (12.1) , una componente integral (12.2) y una componente derivativa (12.3) ; 2) un controlador SlSO-PlD (25.2) que relaciona una parte de la perfusión de control del ePPF con el vector de error de control del monitor eNOX (13) , formado por una componente proporcional (13.1) , una componente integral (13.2) y na componente derivativa (13.3) ; y 3) un controlador SISO-PID (25.3) que relaciona una parte de la perfusión de control del ePPF con el vector de error de control del monitor eNMB (14) , formado por una componente proporcional (14.1) , una componente integral (14.2) y una componente derivativa (14.3) ; - La perfusión de eRMF (15.2) se calcula mediante la suma de: 1) un controlador SISO-PID (26.1) que relaciona una parte de la perfusión de control del eRMF con el vector de error de control del monitor eBIS (12) , formado por una componente proporcional (12.1) , una componente integral (12.2) y una componente derivativa (12.3) ; 2) un controlador SISO-PID (26.2) que relaciona una parte de la perfusión de control del eRMF con el vector de error de control del monitor eNOX (13) , formado por una componente proporcional (13.1) , una componente integral (13.2) y una componente derivativa (13.3) ; y 3) un controlador SISO-PID (26.3) que relaciona una parte de la perfusión de control del eRMF con el vector de error de control del monitor eNMB (14) , formado por una componente proporcional (14.1) , una componente integral (14.2) y una componente derivativa (14.3) ; - La perfusión de eRCN (15.3) se calcula mediante la suma de: 1) un controlador SISO-PID (27.1) que relaciona una parte de la perfusión de control del eRCN con el vector del error de control del monitor eBIS (12) , formado por una componente proporcional (12.1) , una componente integral (12.2) y una componente derivativa (12.3) ; 2) un controlador SISO-PID (27.2) que relaciona una parte de la perfusión de control del eRCN con el vector de error de control del monitor eNOX (13) , formado por una componente proporcional (13.1) , una componente integral (13.2) y una componente derivativa (13.3) ; y 3) un controlador SISO-PID (27.3) que relaciona una parte de la perfusión de control del eRCN con el vector de error de control del monitor eNMB (14) , formado por una componente proporcional (14.1) , una componente integral (14.2) y una componente derivativa (14.3) ; - El sistema de control SynPlD (24) utiliza 9 controladores SISO-PID, agrupados en tres subsistemas de control MISO-PID (figuras 5, 6 y 7) , cada controlador SISO-PID (C¡j ) (figura 8) utiliza para calcular la perfusión del fármaco i (15.i) : - Un sistema de acción proporcional (i.j.1) que define a su salida la acción de perfusión proporcional (15.i.1) , a partir de su entrada que es el error asimétrico proporcional de control (E1) . - Un sistema de acción integral (i.j.2) que define a su salida la acción de perfusión integral (15.i.2) , a partir de su entrada que es el error simétrico integral de control (E2) . - Un sistema de acción derivativa (/'._/'.3) que define a su salida la acción de perfusión derivativa (15.i.3) , a partir de su entrada que es el error asimétrico derivativo de control (E3) . - El sistema de control SynPID (24) utiliza un sistema corrector de perfusiones (17) , que compensa el vector de perfusiones de control (15) con el vector de corrección (18) que están definidas por las desviaciones del vector de variables filtradas de monitorización (10) respecto de unos vectores de umbrales superior e inferior. Estas desviaciones consideradas no han podido ser corregidas por el control multivariable basado en PIDs (24) . - El sistema de control SynPID (24) utiliza un sistema de seguridad (19) , que condiciona el vector de perfusiones de control (15) compensado por el vector de corrección (18) para conducir al vector de control fiable (20) , lo que evita la sobreperfusión e infraperfusión, con ello se consigue evitar periodos de anestesia general profunda que compromete la vida del paciente o periodos de sedación lo que puede ocasionar despertares intraoperatorios. Para evitar la sobreperfusión se aplican las restricciones con el sistema de seguridad (19) para suspender el sistema de bombas de perfusión (2) y para evitar la infraperfusión se aplica el vector de corrección (18) . - El sistema de control SynPID (24) utiliza un sistema cuantificador (21) para que el vector de control fiable (20) sea interpretable por el sistema de bombas de perfusión (2) , que a través de varios catéteres infunden los fármacos vía IV entro del cuerpo del paciente (1) que modificará su estado anestésico y que posteriormente, esas modificaciones serán recogidas por los equipos de monitorización (3) mediante el vector de variables de monitorización (6) . Los pasos para la multi-perfusión de fármacos anestésicos con sinergia mediante control en CL MIMO-PID (SynPlD) aplicado en actos anestésicos vía IV para la perfusión automática, ejecutables en un dispositivo electrónico, son los siguientes para cada momento de actuación: Paso 1: Medir el valor del vector de los monitores eBIS (6.1) , eNOX (6.2) y eNMB (6.3) que depende principalmente del vector de perfusión de los fármacos anestésicos ePPF (5.1) , eRMF (5.2) y eRCN (5.3) . Los fármacos anestésicos se administran al paciente (1) mediante un sistema de bombas de perfusión (2) . Los equipos de monitorización (3) recogen sobre el paciente los efectos de los fármacos anestésicos y del vector de actuaciones quirúrgicas (7) del médico cirujano en una intervención a través del vector de variables de monitorización (6) ; también otros factores pueden influir en el valor del vector de monitorización; la información del vector de variables de monitorización (6) y la decisión tomada sobre el valor del vector de perfusión de fármacos anestésicos (5) se almacena en una memoria; Paso 2: Calcular el vector de perfusión de los fármacos anestésicos ePPF (5.1) , eRMF (5.2) y eRCN (5.3) mediante un sistema de control SynPlD (24) a partir de la realimentación del valor del vector de los monitores eBIS (6.1) , eNOX (6.2) y eNMB (6.3) , del vector de perfusiones del protocolo manual relativas al ePPF (4.1) , al eRMF (4.2) y al eRCN (4.3) y del vector de los valores objetivo de variables monitorizadas relativas al eBIS (8.1) , al eNOX (8.2) y al eNMB (8.3) ; Paso 3: Proceder a la limpieza de ruido y artefactos del vector de los monitores eBIS (6.1) , eNOX (6.2) y eNMB (6.3) , mediante un sistema de limpieza y filtrado para el eBIS (9.1) , un sistema de limpieza y filtrado para el eNOX (9.2) y un sistema de limpieza y filtrado para el eNMB (9.3) , para obtener un vector de variables de monitorización filtrada del eBIS (10.1) , eNOX (10.2) y eNMB (10.3) ; Paso4: Calcular unos vectores de errores de control de los monitores al eBIS (12) , eNOX (13) y al eNMB (14) . El vector de error de control eBIS tiene tres omponentes un error asimétrico proporcional eBIS (12.1) , un error simétrico integral eBIS (12.2) y un error asimétrico derivativo eBIS (12.3) . El vector de error de control eNOX tiene tres componentes un error asimétrico proporcional eNOX (13.1) , un error simétrico integral eNOX (13.2) y un error asimétrico derivativo eNOX (13.3) . El vector de error de control eNMB tiene tres componentes un error asimétrico proporcional eNMB (14.1) , un error simétrico integral eNMB (14.2) y un error asimétrico derivativo eNMB (14.3) . Los vectores de los errores de control (12, 13, 14) se obtienen mediante un generador de errores de control (11) compuesto por un generador de error de la DoH (28) , un generador de error de la ANG (29) y un generador de error de la MRX (30) . El generador de error de la DoH (28) obtiene las tres componentes de error asimétrico proporcional eBIS (12.1) , simétrico integral eBIS (12.2) y asimétrico derivativo eBIS (12.3) a partir de la variable de monitorización filtrada del eBIS (10.1) y del valor objetivo del eBIS (8.1) . El generador de error de la ANG (29) obtiene las tres componentes de error asimétrico proporcional eNOX (13.1) , simétrico integral eNOX (13.2) y asimétrico derivativo eNOX (13.3) a partir de la variable de monitorización filtrada del eNOX (10.2) y del valor objetivo del eNOX (8.2) . El generador de error de la MRX (30) obtiene las tres componentes de error asimétrico proporcional eNMB (14.1) , simétrico integral eNMB (14.2) y asimétrico derivativo eNMB (14.3) a partir de la variable de monitorización filtrada del eNMB (10.3) y del valor objetivo del eNMB (8.3) . Los errores indicarán en el momento de su evaluación la desviación del vector de variables de monitorización (6) respecto del vector de objetivos de las variables monitorizadas (8) . Paso 5: Calcular un vector de perfusiones de control de fármacos de ePPF (15.1) , de eRMF (15.2) y de eRCN (15.3) mediante un controlador multivariable y con sinergia MIMO-PID (16) que presenta como entradas los vectores de errores de control (12, 13, 14) y el vector de perfusiones del protocolo manual (4) . El controlador multivariable y con sinergia MIMO-PID (16) está formado por tres subsistemas de control MISO-PID (25, 26, 27) , que a su vez cada uno está formado por tres controladores SISO-PID: 1) para obtener la perfusión de control del ePPF (15.1) se usan los controladores SISO-PID (25.1, 25.2, 25.3) ; 2) para obtener la perfusión de control del eRMF (15.2) se usan los controladores SISO-PID (26.1, 26.2, 26.3) ; y 3) para obtener la perfusión de control del eRCN (15.3) se usan los controladores SISO-PID (27.1, 27.2, 27.3) . Paso6: Calcular un vector de corrección (18) formado por la perfusión correctora de ePPF (18.1) , la perfusión correctora de eRMF (18.2) y la perfusión correctora de eRCN (18.3) mediante un sistema corrector de perfusiones (17) que está formado por un subsistema de corrección de la perfusión del ePPF (17.1) , un subsistema de corrección de la perfusión del eRMF (17.2) y un subsistema de corrección de la perfusión del eRCN (17.3) a partir del vector de variables filtradas de monitorización (10) compuesto por la monitorización filtrada del eBIS (10.1) , la monitorización filtrada del eNOX (10.2) y la monitorización filtrada del eNMB (10.3) ; el vector de corrección (18) trata de compensar el vector de perfusiones de control (15) con el fin de evitar la infraperfusión para mitigar el efecto de la disminución de la DoH, ANG y MRX; el vector de corrección (18) se calcula en base a un vector de umbrales superior e inferior sobre el vector de variables filtradas de monitorización (10) ; Paso 7: Calcular un vector de control fiable (20) formado por la perfusión fiable de ePPF (20.1) , la perfusión fiable de eRMF (20.2) y la perfusión fiable de eRCN (20.3) mediante un sistema de seguridad (19) que está formado por un subsistema de seguridad de la perfusión del ePPF (19.1) , un subsistema de seguridad de la perfusión del eRMF (19.2) y un subsistema de seguridad de la perfusión del eRCN (19.3) a partir del vector de perfusiones de control (15) formado por la perfusión de control del ePPF (15.1) , la perfusión de control del eRMF (15.2) y la perfusión de control del eRCN (15.3) y a partir del vector de corrección (18) formado por la perfusión correctora de ePPF (18.1) , la perfusión correctora de eRMF (18.2) y la perfusión correctora de eRCN (18.3) ; el sistema de seguridad (19) trata de compensar el vector de perfusiones de control (15) para conducir al vector de control fiable (20) a un valor fiable para el paciente (1) y fiable para causar el efecto deseado en el paciente (1) , lo que evita la sobreperfusión e infraperfusión, con ello se consigue evitar periodos de anestesia general profunda que compromete la vida del paciente o periodos de sedación lo que puede ocasionar despertares intraoperatorios; para evitar la sobreperfusión se aplican unos vectores de restricción de suspensión del sistema de bombas de perfusión (2) y para evitar la infraperfusión se aplica el vector de corrección (18) ; Paso 8: Calcular un vector de perfusiones automáticas (22) formado por la perfusión automática de ePPF (22.1) , la perfusión automática de eRMF (22.2) y la perfusión automática de eRCN (22.3) mediante un sistema cuantificador (21) que está formado por un subsistema de cuantificación de la perfusión del ePPF (21.1) , un subsistema de cuantificación de la perfusión del eRMF (21.2) y un subsistema de cuantificación de la perfusión del eRCN (21.3) a partir de un vector de control fiable (20) formado por la perfusión fiable de ePPF (20.1) , la perfusión fiable de eRMF (20.2) y la perfusión fiable de eRCN (20.3) ; el sistema cuantificador (21) modifica las perfusiones para que el vector de control fiable (20) sean interpretable por el sistema de bombas de perfusión (2) , compuesto por la bomba de ePPF (2.1) , la bomba de eRMF (2.2) y la bomba de eRCN (2.3) , que a través de varios catéteres infunden los fármacos vía IV dentro del cuerpo del paciente (1) ; Paso9: Definir el vector de perfusión de fármacos anestésicos (5) compuesto por la perfusión de ePPF (5.1) , la perfusión de eRMF (5.2) y la perfusión de eRCN (5.3) mediante un sistema de conmutación (23) para controlar el tiempo transcurrido en la IPh, el tiempo en la MPh y el tiempo en la RPh; en la IPh el vector de perfusión de fármacos anestésicos (5) es el mismo que el vector de perfusiones del protocolo manual (4) ; en la MPh el vector de perfusión de fármacos anestésicos (5) es el mismo que el vector de perfusiones automáticas (22) ; y en la RPh se activa la suspensión del sistema de bombas de perfusión (2) ; Paso 10: Calcular la perfusión de control del fármaco ePPF (15.1) a partir del subsistema de control MISO-PID-ePPF Ci (25) , que a su vez está formado por tres controladores SISO-PID (C11, C12, C13) (25.1, 25.2, 25.3) , cada controlador SISO-PID está formado a su vez por tres acciones de control de fármacos que se detallan a continuación: 1) el controlador SISO-PID C11 (25.1) que calcula la contribución a la perfusión de la perfusión de fármaco ePPF (15.1.1) aportada por el vector de error de control del monitor eBIS (12) , está formado por una acción proporcional que relaciona la perfusión parcial de ePPF (15.1.1.1) con el error asimétrico de control proporcional relativo al eBIS (12.1) , por una acción integral que relaciona la perfusión parcial de ePPF (15.1.1.2) con el error simétrico de control integral relativo al eBIS (12.2) y por una acción derivativa que relacional la perfusión parcial de ePPF (15.1.1.3) con el error asimétrico erivativo relativo al eBIS (12.3) ; 2) el controlador SISO-PID C12 (25.2) que calcula la contribución a la perfusión de control de la perfusión de fármaco ePPF (15.1.2) aportada por el vector de error de control del monitor eNOX (13) , está formado por una acción proporcional que relaciona la perfusión parcial de ePPF (15.1.2.1) con el error asimétrico de control proporcional relativo al eNOX (13.1) , por una acción integral que relaciona la perfusión parcial de ePPF (15.1.2.2) con el error simétrico de control integral relativo al eNOX (13.2) y por una acción derivativa que relaciona la perfusión parcial de ePPF (15.1.2.3) con el error asimétrico derivativo relativo al eNOX (13.3) ; 3) el controlador SISO-PID C13 (25.3) que calcula la contribución a la perfusión de control de la perfusión de fármaco ePPF (15.1.3) aportada por el vector de error de control del monitor eNMB (14) , está formado por una acción proporcional que relaciona la perfusión parcial de ePPF (15.1.3.1) con el error asimétrico de control proporcional relativo al eNMB (14.1) , por una acción integral que relaciona la perfusión parcial de ePPF (15.1.3.2) con el error simétrico de control integral relativo al eNMB (14.2) y por una acción derivativa que relaciona la perfusión parcial de ePPF (15.1.3.3) con el error asimétrico derivativo relativo al eNMB (14.3) ; Paso11: Calcular la perfusión de control del fármaco eRMF (15.2) a partir del subsistema de control MISO-PID-eRMF C2 (26) , que a su vez está formado por tres controladores SISO-PID (C21, C22, C23) (26.1, 26.2, 26.3) , cada controlador SISO-PID está formado a su vez por tres acciones de control de fármacos que se detallan a continuación: 1) el controlador SISO-PID C21 (26.1) que calcula la contribución a la perfusión de control de la perfusión de fármaco eRMF (15.2.1) aportada por el vector de error de control del monitor eBIS (12) , está formado por una acción proporcional que relaciona la perfusión parcial de ePPF (15.2.1.1) con el error asimétrico de control proporcional relativo al eBIS (12.1) , por una acción integral que relaciona la perfusión parcial de eRMF (15.2.1.2) con el error simétrico de control integral relativo al eBIS (12.2) y por una acción derivativa que relacional la perfusión parcial de eRMF (15.2.1.3) con el error asimétrico derivativo relativo al eBIS (12.3) ; 2) el controlador SISO-PID C22 (26.2) que calcula la contribución a la perfusión de control de la perfusión de fármaco eRMF (15.2.2) aportada por el vector de error de control del monitor eNOX (13) , está formado por una acción proporcional que relaciona la perfusión parcial de eRMF (15.2.2.1) con el error asimétrico de control roporcional relativo al eNOX (13.1) , por una acción integral que relaciona la perfusión parcial de eRMF (15.2.2.2) con el error simétrico de control integral relativo al eNOX (13.2) y por una acción derivativa que relaciona la perfusión parcial de eRMF (15.2.2.3) con el error asimétrico derivativo relativo al eNOX (13.3) ; 3) el controlador SISO-PID C23 (26.3) que calcula la contribución a la perfusión de control de la perfusión de fármaco eRMF (15.2.3) aportada por el vector de error de control del monitor eNMB (14) , está formado por una acción proporcional que relaciona la perfusión parcial de eRMF (15.2.3.1) con el error asimétrico de control proporcional relativo al eNMB (14.1) , por una acción integral que relaciona la perfusión parcial de eRMF (15.2.3.2) con el error simétrico de control integral relativo al eNMB (14.2) y por una acción derivativa que relaciona la perfusión parcial de eRMF (15.2.3.3) con el error asimétrico derivativo relativo al eNMB (14.3) ; Paso12: Calcular la perfusión de control del fármaco eRCN (15.3) a partir del subsistema de control MISO-PID-eNMB C3 (27) , que a su vez está formado por tres controladores SISO-PID (C31, C32, C33) (27.1, 27.2, 27.3) , cada controlador SISO-PID está formado a su vez por tres acciones de control de fármacos que se detallan a continuación: 1) el controlador SISO-PID C31 (27.1) que calcula la contribución a la perfusión de control de la perfusión de fármaco eRCN (15.3.1) aportada por el vector de error de control relativo al eBIS (12) , está formado por una acción proporcional que relaciona la perfusión parcial de eRCN (15.3.1.1) con el error asimétrico de control proporcional relativo al eBIS (12.1) , por una acción integral que relaciona la perfusión parcial de eRCN (15.3.1.2) con el error simétrico de control integral relativo al eBIS (12.2) y por una acción derivativa que relaciona la perfusión parcial de eRCN (15.3.1.3) con el error asimétrico derivativo relativo al eBIS (12.3) ; 2) el controlador SISO-PID C32 (27.2) que calcula la contribución a la perfusión de control de la perfusión de fármaco eRCN (15.3.2) aportada por el vector de error de control del m onitor eNOX (13) , está formado por una acción proporcional que relaciona la perfusión parcial de eRCN (15.3.2.1) con el error asimétrico de control proporcional relativo al eNOX (13.1) , por una acción integral que relaciona la perfusión parcial de eRCN (15.3.2.2) con el error simétrico de control integral relativo al eNOX (13.2) y por una acción derivativa que relaciona la perfusión parcial de eRCN (15.3.2.3) con el error asimétrico derivativo relativo al eNOX (13.3) ; 3) el controlador SISO-PID C33 (27.3) que calcula la contribución a la erfusión de control de la perfusión de fármaco eRCN (15.3.3) aportada por el vector de error de control relativo al eNMB (14) , está formado por una acción proporcional que relaciona la perfusión parcial de eRMF (15.3.3.1) con el error asimétrico de control proporcional relativo al eNMB (14.1) , por una acción integral que relaciona la perfusión parcial de eRCN (15.3.3.2) con el error simétrico de control integral relativo al eNMB (14.2) y por una acción derivativa que relaciona la perfusión parcial de eRCN (15.3.3.3) con el error asimétrico derivativo relativo al eNMB (14.3) ; A continuación, se expresan las ecuaciones que definen el sistema de control SynPlD que, haciendo uso del vector de perfusiones del protocolo manual (4) , del vector de variables de monitorización (6) , del vector de objetivos de las variables monitorizadas (8) , de los vectores de los errores de control (12, 13, 14) , del vector de corrección (18) y del vector de control fiable (20) , obtiene un vector de perfusión de fármacos anestésicos (5) que mantendrá al paciente (1) en un estado anestésico satisfactorio a pesar de la cirugía. Los fármacos considerados son ePPF, eRMF y eRCN y los monitores considerados son eBIS, eNOX y eNMB, por lo que el orden de los vectores se fija en 3x1 y el orden de las matrices en 3x3, en este ejemplo de realización de la invención. Resaltar que la presente invención no hace uso de modelos fármacocinéticos o fármacodinamicos para su diseño ni para la personalización a cada paciente (1) . Antes de detallar el método y en aras de clarificar las variables que aparecen en las ecuaciones, se relacionan a continuación las más importantes agrupadas por sus unidades físicas y características comunes: 1) Las dimensiones del sistema multivariable son de 3x3, relativo al vector de variables de monitorización (6) r=3, donde 1 hace referencia al eBIS, 2 hace referencia al eNOX y 3 hace referencia al eNMB; y relativo al vector de perfusión de fármacos anestésicos (5) s=3, donde 1 hace referencia al ePPF, 2 hace referencia al eRMF y 3 hace referencia al eRCN; 2) El tiempo discretizado se representa con el número entero k, de tal forma que un tiempo real t, se puede mostrar como: t=k-Ts; donde Ts es el periodo de perfusión; el tiempo de inicio de la IPh es t, el tiempo de inicio de la MPh es tm y el inicio del tiempo de la RPh es tr; 3) Vectores que hacen referencia a las perfusiones de fármacos, unidades de perfusión por peso del paciente [pg/ (min-kg) j, ecuación general: U X = [«x1 Mx2 Mx3 T Donde ux hace referencia al vector columna de perfusiones con dimensión (3x1) ; ux1 es la perfusión del ePPF; ux2 es la perfusión del eRMF; ux3 es la perfusión del eRCN; T indica la transposición del vector. El listado de variables de perfusión es el siguiente: x Ref. Vector de perfusiones Símbolo Ecuac. x: hace referencia al subíndice del vector considerado; Ref. indica el número que aparece en las figuras; Símbolo: Identifica la variable por su nombre; Ecuac. indica la ecuación de la descripción general donde ha sido definida. ) Vectores que hacen referencia a las variables de monitorización, unidades de monitorización (UM) y el rango de variación es de 0 a 100; ecuación general: y z = [y 2 i yz2 yz3 ]T, Donde yz hace referencia al vector columna variables de monitorización (3x1) ; yz1 es la monitorización del eBIS; yz2 es la monitorización del eNOX; yz3 es la monitorización del eNMB; T indica la transposición del vector. El listado de variables de monitorización y sus variantes es el siguiente: z Ref. Descripción del vector de Símbolo Ecuac. 6 variables de monitorización medidas y [2. 1] T 8 valores objetivo de las variables monit yT [2. 6] f 10 variables de monitorización filtradas yf [3. 1] HI umbrales superiores de activación de yHI [6. 3] LO umbrales inferiores de activación de l yLO [6. 4] z: hace referencia al subíndice del vector considerado; Ref. indica el número que aparece en las figuras; Símbolo: Identifica la variable por su nombre; Ecuac. indica la ecuación de la descripción general donde ha sido definida. ) Vectores que hacen referencia a los vectores de los errores de control (12, 13, 14) , con rango de variación ±200 UM; ecuación general: e j = \_e P j e i j e F j \ ' Donde ej hace referencia al vector columna de errores de control (3x1) ; e1 es el vector de error de control relativo al eBIS; e2 es el vector de error de control relativo al eNOX; e3 es el vector de error de control relativo al eNMB; eP¡ es el vector de error asimétrico de control proporcional relativo al monitor¡; e¡ es el vector de error simétrico de control integral relativo al monitor ¡; y eF¡ es el vector de error asimétrico y filtrado de control derivativo relativo al monitor¡; T indica la transposición del vector. El listado de variables de error y sus variantes es el siguiente: j Ref. Descripción del error de control Símbolo Ecuac. j: hace referencia al subíndice del vector considerado; Ref. indica el número que aparece en las figuras; Símbolo: Identifica la variable por su nombre; Ecuac. indica la ecuación de la descripción general donde ha sido definida. ) Variables que hacen referencia al controlador multivariable y con sinergia MIMO-PID (16) ; a los subsistemas de control MISO-PID (25, 26, 27) y a los controladores SISO-PID. Donde [PID] es la matriz de controladores PID que componen el controlador multivariable y con sinergia MIMO-PID (16) ; C-i es el vector de controladores PID que componen el subsistema de control MISO-PID-ePPF (25) ; C2 es el vector de controladores PID que componen el subsistema de control MISO-PID-eRMF (26) ; C3 es el vector de controladores PID que componen el subsistema de control MISO-PID-eNMB (27) ; Cj es el controlador SISO-PID que relaciona el error asociado al monitor i con el fármaco j. b j Ref. Descripción del controlador PID Símbolo Ecuac. ica el número que aparece en las figuras; Símbolo: Identifica la variable por su nombre; Ecuac. indica la ecuación de la descripción general donde ha sido definida. El sistema de la presente invención se actualiza cada Ts segundos, tiempo asociado al periodo de muestreo. El sistema se inicia en el tiempo t¡ con la IPh. A partir del instante de conmutación para pasar de la IPh a la MPh (tm) los valores son actualizados cada periodo de ejecución del método (Ts) según las ecuaciones 2 a 13, según se detalla a continuación: Ecuación 2: M e d i r e l v e c t o r d e v a r i a b l e s d e m o n i t o r i z a c i ó n ( 6 ) ; d e f i n i r y c a l c u l a r e l v e c t o r d e p e r f u s i o n e s d e l p r o t o c o l o m a n u a l ( 4 ) ; y f i j a r e l v e c t o r d e o b je t i v o s d e l a s v a r i a b l e s m o n i t o r i z a d a s ( 8 ) . E s t o s s o n l o s r e s u l t a d o s o b t e n i d o s e n e l p a s o 2. . R e f . i n d i c a e l n ú m e r o q u e a p a r e c e e n l a s f i g u r a s ; E c u a c . i n d i c a la e c u a c i ó n d e la d e s c r i p c i ó n g e n e r a l d o n d e h a s i d o d e f i n i d a, p a r t i c u l a r i z a d a p a r a s = r = 3 . Ecuación 3: C a l c u l a r e l v e c t o r d e v a r i a b l e s f i l t r a d a s d e m o n i t o r i z a c i ó n ( 1 0 ) , d e f i n i r u n b a n c o d e f i l t r o s ( 9 ) , b a s a d o s e n f i l t r o s p a s o b a jo d e o r d e n 1 ; y d e f i n i r u n v e c t o r d e f r e c u e n c i a s d e c o r t e . E l r e s u l t a d o d e l p a s o 3 e s e l v e c t o r d e v a r i a b l e s f i l t r a d a s d e R e f . i n d i c a e l n ú m e r o q u e a p a r e c e e n l a s f i g u r a s ; E c u a c . i n d i c a la e c u a c i ó n d e la d e s c r i p c i ó n g e n e r a l d o n d e h a s i d o d e f i n i d a, p a r t i c u l a r i z a d a p a r a s = r = 3 . Ecuación 4: C a l c u l a r e l v e c t o r d e e r r o r d e c o n t r o l d e l m o n i t o r e B I S e i ( 1 2 ) c o n e l g e n e r a d o r d e e r r o r d e la D o H ( 2 8 ) , e l v e c t o r d e e r r o r d e c o n t r o l d e l m o n i t o r e N O X e2 ( 1 3 ) c o n e l g e n e r a d o r d e e r r o r d e la A N G ( 29 ) , y e l v e c t o r d e e r r o r d e c o n t r o l d e l m o n i t o r e N M B e3 ( 1 4 ) c o n e l g e n e r a d o r d e e r r o r d e la R M X ( 3 0 ) , c a d a u n o c o n s u s c o m p o n e n t e s p r o p o r c i o n a l, i n t e g r a l y d e r i v a t i v a ( 12 .1, 12 .2, 12 .3 ) , ( 13 .1, 13.2, 13 .3 ) y ( 14 .1, 14.2, 14.3 ) ; c a l c u l a r lo s e r r o r e s a s i m é t r i c o p r o p o r c i o n a l ( 12 .1, 13 .1, 14 .1 ) , s i m é t r i c o i n t e g r a l ( 12 .2, . L o s v e c t o r d e o b j e t i v o s d e l a s v a r i a b l e s m o n i t o r i z a d a s ( 8 ) e s t á p o n d e r a d o p o r u n a m a t r i z d e c o e f i c i e n t e s [B] e n la a c c i ó n p r o p o r c i o n a l y u n a m a t r i z d e c o e f i c i e n t e s [G] e n la a c c i ó n d e r i v a t i v a, s i e n d o u n i t a r i o e l v a l o r d e p o n d e r a c i ó n d e la a c c i ó n i n t e g r a l . E l s i s t e m a d e c o n t r o l S y n P l D d e la p r e s e n t e i n v e n c i ó n s e d e f i n e n t a n t o [B] c o m o [G] d e p e n d i e n t e s d e l v e c t o r d e v a r i a b l e s d e m o n i t o r i z a c i ó n ( 6 ) y d e l v e c t o r d e o b je t i v o s d e l a s v a r i a b l e s m o n i t o r i z a d a s ( 8 ) . L o s r e s u l t a d o s d e l p a s o 4 s o n l o s v e c t o r e s d e l o s e r r o r e s d e c o n t r o l Ref. Definición matemática Ecuac. Ref. indica el número que aparece en las figuras; Ecuac. indica la ecuación de la descripción general donde ha sido definida, particularizada para s=r=3. Ecuación 5: Calcular el vector de perfusiones de control (15) mediante un controlador multivariable y con sinergia MIMO-PID (16) , los vectores de los errores de control del monitor eBIS (12) , eNOX (13) y eNMB (14) y el vector de perfusiones del protocolo manual (4) ; definir la matriz [PID] de controladores SISO-PID que componen el controlador multivariable y con sinergia MIMO-PID (16) ; definir los controladores SISO-PID C¡j relativos al monitor j y al fármaco /; definir las acciones de control proporcional, integral y derivativa de los controladores SISO-PID cuya suma define la acción de control total de cada controlador SISO-PID; definir las matrices de ganancias relativas a los controladores SISO-PID; definir la matriz de sinergia de fármacos; definir el vector Ko de ganancias sobre el vector de perfusiones del protocolo manual (4) ; definir los subsistemas de control MISO-PID (25, 26, 27) . El resultado del Paso 5 es el vector de perfusiones de control (15) . Ref. Definición matemática Ecuac. 15 Upid = [M1 U 2 U3 ] [5. 1] Ref. Definición matemática Ecuac. Ref. indica el número que aparece en las figuras; Ecuac. indica la ecuación de la descripción general donde ha sido definida, particularizada para s=r=3. Ecuación 6: Definir y calcular unas perfusiones correctoras de fármacos (18) a partir del vector de variables filtradas de monitorización (10) ; definir los vectores de umbrales superiores e inferiores de activación de la corrección. El resultado del paso 6 es el vector de corrección (18) . Ref. Definición matemática Ecuac. Ref. Definición matemática Ecuac. Ref. indica el número que aparece en las figuras; Ecuac. indica la ecuación de la descripción general donde ha sido definida, particularizada para s=r=3. Ecuación 7: Definir y calcular el vector de control fiable (20) , para evitar la hiper/infra dosificación de fármacos, a partir del vector de perfusiones de control (15) y del vector de corrección (18) ; definir los vectores de limites superiores e inferiores de la perfusión de fármacos atendiendo a dos conceptos: 1 ) sólo se puede aplicar perfusiones positivas al paciente (1 ) , por tanto, el sistema de bombas de perfusión (2 ) queda suspendido (perfusión nula) cuando el vector de perfusiones de control (15) más el vector de corrección (18) da como resultado perfusiones negativas o nulas; y 2 ) los límites máximos de las perfusiones deben de evitar las sobredosis de fármacos para evitar los niveles de toxicidad. El resultado del paso 7 es el vector de control fiable (20) . Ref. Definición matemática Ecuac. Ref. Definición matemática Ecuac. Ref. indica el número que aparece en las figuras; Ecuac. indica la ecuación de la descripción general donde ha sido definida, particularizada para s=r=3. Ecuación 8: Definir y calcular el vector de perfusiones automáticas (22) a partir del vector de control fiable (20 ) ; definir el vector de resoluciones de cada bomba de perfusión de fármacos; el vector de control fiable (20 ) se acomoda a la resolución del sistema de bombas de perfusión continua (2 ) para obtener así el vector de perfusiones automáticas (22) que se dispensan al paciente (1) . El resultado del paso 8 es el vector de perfusiones automáticas (2 2 ) . Ref. Definición matemática Ecuac. Ref. indica el número que aparece en las figuras; Ecuac. indica la ecuación de la descripción general donde ha sido definida, particularizada para s=r=3. Ecuación 9: Definir y calcular el vector de perfusión de fármacos anestésicos (5) a partir del vector de perfusiones del protocolo manual (4) y el vector de perfusiones automáticas (22) a partir de un sistema de conmutación (23) . El resultado del paso 9 es el vector de perfusiones de fármacos anestésicos (5) . Ref. Definición matemática Ecuac. Ref. indica el número que aparece en las figuras; Ecuac. indica la ecuación de la descripción general donde ha sido definida, particularizada para s=r=3. Ecuación 10: Definir el subsistema de control MISO-PID-ePPF (25) como un conjunto de controladores SISO-PID; calcular la perfusión de control del ePPF (15.1) ; a partir de los controladores SISO-PID (25.1, 25, .2, 25.3) , de los vectores de los errores de control (12, 13, 14) y de la perfusión de ePPF del protocolo manual (4.1) . El resultado del paso 10 es la perfusión de control del ePPF (15.1) . Ref. Definición matemática Ecuac. U * oii muoli 15.1 1 ~ C 1 ^ i + [10.2] U1 ~ Cn *^n + C12 '^12 + C13 '^13 + * 011 Uol1 Ref. indica el número que aparece en las figuras; Ecuac. indica la ecuación de la descripción general donde ha sido definida, particularizada para s=r=3. Ecuación 11: Definir el subsistema de control MISO-PID-eRMF (26) como un conjunto de controladores SISO-PID; calcular la perfusión de control del eRMF (15.2) ; a partir de los controladores SISO-PID (26.1, 26, .2, 26.3) , de los vectores de los errores de control (12, 13, 14) y de la perfusión de ePPF del protocolo manual (4.2) . El resultado del paso 11 es la perfusión de control del eRMF (15.2) . Ref. Definición matemática Ecuac. Ref. Definición matemática Ecuac. Ref. indica el número que aparece en las figuras; Ecuac. indica la ecuación de la descripción general donde ha sido definida, particularizada para s=r=3. Ecuación 12: Definir el subsistema de control MISO-PID-eNMB (27) como un conjunto de controladores SISO-PID; calcular la perfusión de control del eRCN (15.3) ; a partir de los controladores SISO-PID (27.1, 27, .2, 27.3) , de los vectores de los errores de control (12, 13, 14) y de la perfusión de eRCN del protocolo manual (4.3) . El resultado del paso 11 es la perfusión de control del eRCN (15.3) . Ref. Definición matemática Ecuac. U3 C 3 -S, + Kol3 'Ug¡3 15.3 [12.2] U3 C3l'$31 + C32 '^ 32 + C33 '$33 + Kol3 'Uol3 Ref. indica el número que aparece en las figuras; Ecuac. indica la ecuación de la descripción general donde ha sido definida, particularizada para s=r=3. Ecuación 13: Se formula para la reivindicación de nuevos fármacos y monitores. Ref. Definición matemática Ecuac. Ref. indica el número que aparece en las figuras; Ecuac. indica la ecuación de la descripción general donde ha sido definida, particularizada para s=r=3. Ecuación 14: Ajuste de los parámetros del sistema de control SynPID a cada paciente para absorber la variabilidad inter/intrapaciente. El ajuste involucra al paso 3 y al paso 5 de la invención. En el paso 3 se han de ajustar las frecuencias de corte de los filtros xpresadas en las ecuaciones [3. 5] y [3. 6]. En el paso 5 se han de ajustar las matrices de ganancias del controlador multivariable y con sinergia MIMO-PID (16) expresadas en las ecuaciones [5. 16], [5. 17] y [5. 18]. La información necesaria para el ajuste se extrae en la IPh donde al paciente (1) se le somete únicamente al vector de perfusiones del protocolo manual (4) . Por tanto, desde t¡ hasta tm se almacenan en una memoria las ejecuciones del método y justo en el tiempo tm se aplica una variante del método de Cohen-Coon de ajuste empírico de PIDs y en ese instante el sistema de conmutación (23) el vector de perfusión de fármacos anestésicos (5) es el resultado del sistema de control SynPlD (24) según el vector de perfusiones automáticas (22) . Las ganancias relativas a la matriz de ganancias proporcional [5. 19] está relacionada con el peso del paciente y el vector de perfusiones del protocolo manual (4) están relacionadas con el peso, altura, género y masa muscular del paciente. La ecuación 14 involucra a todos los pasos definidos para la invención propuesta, pero de forma directa involucra especialmente a los pasos 3, 5 y 6. Una vez calculadas las ganancias en el tiempo tm, estas permanecerán constantes hasta el tiempo de recuperación tr. Los sistemas que necesitan ajuste son: - Banco de filtros (9) : es necesario ajustar los tres parámetros que hacen referencia a la frecuencia de corte. - Controlador multivariable y con sinergia MIMO-PID (16) : es necesario ajustar 18 parámetros, por cada controlador SISO-PID hay que ajusta una ganancia proporcional, una integral y una derivativa. - Sistema corrector de perfusiones (17) : que utiliza las ganancias proporcionales del controlador multivariable y con sinergia MIMO-PID (16) . Ref. Definición matemática Ecuac. Ref. indica el número que aparece en las figuras; Ecuac. indica la ecuación de la descripción general donde ha sido definida, particularizada para s=r=3. "x " identifica el producto elemento a elemento (producto Schur) . Donde K es una ganancia universal [ (¡ig/ (min) ) /UM]; [KP] es la matriz de ganancias proporcionales [ (pg/ (min-kg) ) /UM]; [K |] es la matriz de ganancias integrales [ (pg/ (min-kg) ) / (UM-min) ]; [T|] es la matriz de tiempos de acción integral [min]; [KD] es la matriz de ganancias derivativas [ (pg/kg) /UM]; [TD] es la matriz de tiempos de acción derivativo [min]. Ecuación 15: Ajuste de otros parámetros del sistema de control SynPÍD que son universales y comunes a todos los pacientes (común a la variabilidad inter/intrapaciente) . Estos parámetros son en general constantes, pero pueden ser ajustados de forma explícita y generalizada por sexo, grupos de población (diabéticos, obesos...) , tipos de irugía, por territorios y/o edades. A continuación, se relacionan los parámetros considerados y las ecuaciones en las que aparecen: Parámetro Tipo Definición Ecuac. Parámetro Tipo Definición Ecuac. APLICACIÓN INDUSTRIAL Respecto de la implementación del sistema de multi-perfusión de fármacos con sinergia mediante control en CL MIMO-PID (SynPlD) aplicado en actos anestésicos vía IV de la presente invención, una de las realizaciones contempla su ejecución en código interpretable por dispositivos Android, IOS, Arduino, Raspberr y -PI, ordenador personal, bombas de perfusión comerciales o hardware específico. El sistema de control SynPID se ejecuta de forma iterativa cada Ts segundos y consta de las siguientes fases: 1) Puesta en servicio en t¡ donde existen N¡ iteraciones del método; 2) IPh, desde t¡ hasta tm, donde existen Nm-N¡ iteraciones del método; 3) MPh, desde tm hasta tr; y 4) RPh, a partir de tr, donde existen Nr-Nm iteraciones del método. El resultado de cada iteración es obtener el vector de perfusión de fármacos anestésicos (5) que se ha de administrar al paciente (1) con el sistema de bombas de perfusión (2) para que el vector de variables de monitorización (6) sea conducido al vector de objetivos de las variables monitorizadas (8) a pesar del vector de actuaciones quirúrgicas (7) . Las acciones a tomar en cada una de las fases de aplicación del método SynPID implementado en cualquiera de los dispositivos antes indicados son: 1) Antes de la puesta en servicio se deben de obtener los siguientes datos: 1) del paciente (1) el peso, edad, sexo, altura y masa muscular para ajustar vector de perfusiones del protocolo manual (4) del que derivarán los valores de los vectores de las ecuaciones [2.4] y [2.5]; 2) del sistema de bombas de perfusión (2) su resolución para ajustar el vector de la ecuación [8. 3]; 3) del sistema S y n P l D ( 24 ) s u p e r i o d o d e e j e c u c i ó n m o s t r a d o e n la e c u a c i ó n [ 2. 4 ] ; la m a t r i z d e s i n e r g i a d e f á r m a c o s m o s t r a d a e n la e c u a c i ó n [ 5. 10 ] ; l a s m a t r i c e s d e a s i m e t r í a d e l o s e r r o r e s d e c o n t r o l m o s t r a d o s e n l a s e c u a c i o n e s [ 4. 3 ] y [ 4. 5 ] y e n g e n e r a l d e t o d o s l o s p a r á m e t r o s m o s t r a d o s e n la E c u a c i ó n 15. 2 ) E n la I P h e l v e c t o r d e p e r f u s i ó n d e f á r m a c o s a n e s t é s i c o s ( 5 ) q u e s e a d m i n i s t r a a l p a c i e n t e ( 1 ) s e c o r r e s p o n d e c o n e l v e c t o r d e p e r f u s i o n e s d e l p r o t o c o lo m a n u a l ( 4 ) t a l y c o m o s e m o s t r ó e n la e c u a c i ó n [ 2. 3 ] . 3 ) A l f i n a l d e la I P h s e r e a l i z a e l a j u s t e d e l a s m a t r i c e s d e g a n a n c i a s m o s t r a d a s e n l a s e c u a c i o n e s [ 5. 4 ], [ 5. 5 ] y [ 5. 6 ] y e n g e n e r a l d e t o d o s l o s p a r á m e t r o s m o s t r a d o s e n la E c u a c i ó n 14. 4 ) E n la M P h e l v e c t o r d e p e r f u s i ó n d e f á r m a c o s a n e s t é s i c o s ( 5 ) q u e s e a d m i n i s t r a a l p a c i e n t e ( 1 ) s e c o r r e s p o n d e c o n e l v e c t o r d e p e r f u s i o n e s a u t o m á t i c a s ( 22 ) . 5 ) E n la R P h e l v e c t o r d e p e r f u s i ó n d e f á r m a c o s a n e s t é s i c o s ( 5 ) q u e s e a d m i n i s t r a a l p a c i e n t e ( 1 ) s e a n u l a . E n u n a i t e r a c i ó n i n d e t e r m i n a d a d e l s i s t e m a d e c o n t r o l S y n P l D s e d e b e n d e s e g u i r l a s s i g u i e n t e s a c t u a c i o n e s y e n e l o r d e n i n d i c a d o : 1. H a y q u e c o m e n z a r p o r a d q u i r i r la i n f o r m a c i ó n d e l v e c t o r d e v a r i a b l e s d e m o n i t o r i z a c i ó n ( 6 ) u t i l i z a n d o l o s e q u i p o s d e m o n i t o r i z a c i ó n ( 3 ) , la i n f o r m a c i ó n a d q u i r i d a e n la i t e r a c i ó n a c t u a l y e n l a s i t e r a c i o n e s p a s a d a s s e a l m a c e n a n e n u n a m e m o r i a p a r a s u p o s t e r i o r u t i l i z a c i ó n ; la i n f o r m a c i ó n o b t e n i d a e n e s t a a c t u a c i ó n s e r v i r á p a r a la r e a l i m e n t a c i ó n d e l s i s t e m a d e c o n t r o l e n C L ; 2. H a y q u e f i j a r e l v e c t o r d e o b j e t i v o s d e l a s v a r i a b l e s m o n i t o r i z a d a s ( 8 ) ; e l r e s u l t a d o d e la i t e r a c i ó n a c t u a l y d e l a s i t e r a c i o n e s p a s a d a s s e a l m a c e n a n e n u n a m e m o r i a p a r a s u p o s t e r i o r u t i l i z a c i ó n ; 3. H a y q u e p r o c e d e r a la l i m p i e z a d e r u id o y a r t e f a c t o s d e l v e c t o r d e v a r i a b l e s d e m o n i t o r i z a c i ó n ( 6 ) m e d i a n t e u n b a n c o d e f i l t r o s ( 9 ) p a r a o b t e n e r e l v e c t o r d e v a r i a b l e s f i l t r a d a s d e m o n i t o r i z a c i ó n ( 10 ) ; e l r e s u l t a d o d e la i t e r a c i ó n a c t u a l y d e l a s i t e r a c i o n e s p a s a d a s s e a l m a c e n a n e n u n a m e m o r i a p a r a s u p o s t e r i o r u t i l i z a c i ó n ; 4. H a y q u e c a l c u l a r l o s v e c t o r e s d e lo s e r r o r e s d e c o n t r o l ( 12, 13, 14 ) m e d i a n t e u n g e n e r a d o r d e e r r o r e s d e c o n t r o l ( 11 ) ; c a d a v e c t o r d e e r r o r d e c o n t r o l e s t á f o r m a d o p o r n e r r o r a s i m é t r i c o p r o p o r c i o n a l, u n e r r o r s i m é t r i c o i n t e g r a l y u n e r r o r a s i m é t r i c o d e r i v a t i v o ; u t i l i z a n d o l o s i n s t a n t e s a c t u a l e s d e l v e c t o r d e o b j e t i v o s d e l a s v a r i a b l e s m o n i t o r i z a d a s ( 8 ) y d e l v e c t o r d e v a r i a b l e s f i l t r a d a s d e m o n i t o r i z a c i ó n ( 10 ) ; e l r e s u l t a d o d e la i t e r a c i ó n a c t u a l y d e l a s i t e r a c i o n e s p a s a d a s s e a l m a c e n a n e n u n a m e m o r i a p a r a s u p o s t e r i o r u t i l i z a c i ó n ; . H a y q u e c a l c u l a r e l v e c t o r d e p e r f u s i o n e s d e c o n t r o l ( 15 ) m e d i a n t e u n c o n t r o l a d o r m u l t i v a r i a b l e y c o n s i n e r g i a M I M O - P I D ( 16 ) q u e p r e s e n t a c o m o e n t r a d a s l o s v e c t o r e s d e l o s e r r o r e s d e c o n t r o l ( 12, 13, 14 ) y e l v e c t o r d e p e r f u s i o n e s d e l p r o t o c o l o m a n u a l ( 4 ) ; d e c a d a c o n t r o l a d o r S I S O - P I D s e o b t i e n e la c o n t r i b u c i ó n a c a d a f á r m a c o d e c a d a e r r o r d e c o n t r o l d i s t r i b u i d a e n u n a a c c i ó n p r o p o r c i o n a l q u e h a c e u s o d e la i t e r a c i ó n a c t u a l, u n a a c c i ó n i n t e g r a l q u e h a c e u s o d e la i t e r a c i ó n a c t u a l y t o d a s l a s p a s a d a s y u n a a c c i ó n d e r i v a t i v a q u e h a c e u s o d e la i t e r a c i ó n a c t u a l y d e la a n t e r i o r ; e l r e s u l t a d o d e la i t e r a c i ó n a c t u a l y d e la s i t e r a c i o n e s p a s a d a s s e a l m a c e n a n e n u n a m e m o r i a p a r a s u p o s t e r i o r u t i l i z a c i ó n ; . H a y q u e c a l c u l a r u n v e c t o r d e c o r r e c c i ó n ( 18 ) m e d i a n t e u n s i s t e m a c o r r e c t o r d e p e r f u s i o n e s ( 17 ) q u e p r e s e n t a a s u e n t r a d a e l v e c t o r d e v a r i a b l e s f i l t r a d a s d e m o n i t o r i z a c i ó n ( 10 ) d e la i t e r a c i ó n a c t u a l ; e l r e s u l t a d o d e la i t e r a c i ó n a c t u a l y d e la s i t e r a c i o n e s p a s a d a s s e a l m a c e n a n e n u n a m e m o r i a p a r a s u p o s t e r i o r u t i l i z a c i ó n ; . H a y q u e c a l c u l a r u n v e c t o r d e c o n t r o l f i a b l e ( 20 ) m e d i a n t e u n s i s t e m a d e s e g u r i d a d ( 19 ) q u e p r e s e n t a a s u e n t r a d a la i t e r a c i ó n a c t u a l d e l v e c t o r d e p e r f u s i o n e s d e c o n t r o l ( 15 ) y d e l v e c t o r d e c o r r e c c i ó n ( 18 ) ; e l r e s u l t a d o d e la i t e r a c i ó n a c t u a l y d e l a s i t e r a c i o n e s p a s a d a s s e a l m a c e n a n e n u n a m e m o r i a p a r a s u p o s t e r i o r u t i l i z a c i ó n ; . H a y q u e c a l c u l a r u n v e c t o r d e p e r f u s i o n e s a u t o m á t i c a s ( 22 ) m e d i a n t e u n s i s t e m a c u a n t i f i c a d o r ( 21 ) q u e p r e s e n t a a s u e n t r a d a la i t e r a c i ó n a c t u a l d e l v e c t o r d e c o n t r o l f i a b l e ( 20 ) ; e l r e s u l t a d o d e la i t e r a c i ó n a c t u a l y d e l a s i t e r a c i o n e s p a s a d a s s e a l m a c e n a n e n u n a m e m o r i a p a r a s u p o s t e r i o r u t i l i z a c i ó n ; . H a y q u e d e f i n i r e l v e c t o r d e p e r f u s i ó n d e f á r m a c o s a n e s t é s i c o s ( 5 ) m e d i a n t e u n s i s t e m a d e c o n m u t a c i ó n ( 23 ) q u e p r e s e n t a c o m o e n t r a d a s la i t e r a c i ó n a c t u a l d e l v e c t o r d e p e r f u s i o n e s d e c o n t r o l ( 15 ) , d e l v e c t o r d e p e r f u s i o n e s d e l p r o t o c o l o m a n u a l ( 4 ) y d e u n v e c t o r d e c e r o s ; e l r e s u l t a d o d e la i t e r a c i ó n a c t u a l y d e l a s i t e r a c i o n e s p a s a d a s s e a l m a c e n a n e n u n a m e m o r i a p a r a s u p o s t e r i o r u t i l i z a c i ó n ; 0. U n a v e z q u e s e h a o b t e n i d o e l v e c t o r d e p e r f u s i ó n d e f á r m a c o s a n e s t é s i c o s ( 5 ) s e c o m i e n z a u n a n u e v a i t e r a c i ó n, v o l v i e n d o a l p u n t o u n o d e e s t a l i s t a e i n c r e m e n t a n d o d e l n ú m e r o d e la i t e r a c i ó n . E l s i s t e m a d e m u l t i - p e r f u s i ó n d e f á r m a c o s a n e s t é s i c o s c o n s i n e r g i a m e d i a n t e c o n t r o l e n C L M I M O - P I D ( S y n P l D ) a p l i c a d o e n a c t o s a n e s t é s i c o s v í a I V d e la p r e s e n t e i n v e n c i ó n, e s t á p r e p a r a d o p a r a s u i n s t a la c i ó n e n b o m b a s d e p e r f u s i ó n i n t e l i g e n t e s q u e h a c e n u s o d e u n c i r c u i t o e l e c t r ó n i c o b a s a d o e n u n m i c r o p r o c e s a d o r c o n m e m o r i a, c o n f i g u r a d o p a r a d e t e r m i n a r e l v e c t o r d e p e r f u s i ó n d e f á r m a c o s a n e s t é s i c o s ( 5 ) p a r a a d m i n i s t r a r a l p a c i e n t e ( 1 ) p o r v í a I V e n u n a c t o q u i r ú r g i c o, c a d a p e r i o d o d e i t e r a c i ó n T s e s c o n f i g u r a b l e e n t r e 1 y 30 s e g u n d o s . E l v e c t o r d e p e r f u s i ó n d e f á r m a c o s a n e s t é s i c o s ( 5 ) t i e n e c o m o m i s i ó n o b t e n e r u n e s t a d o a n e s t é s i c o s a t i s f a c t o r i o d a d o p o r e l v e c t o r d e o b j e t i v o s d e la s v a r i a b l e s m o n i t o r i z a d a s ( 8 ) . E l s i s t e m a d e c o n t r o l S y n P l D e s t á c o n f i g u r a d o p a r a l l e v a r a c a b o e l m é t o d o p r e s e n t a d o e n la i n v e n c i ó n q u e s e r e p i t e c a d a T s s e g u n d o s, e l s i s t e m a c o m p r e n d e la e j e c u c i ó n d e l o s s i g u i e n t e s b l o q u e s : 1. Memoria : U n a m e m o r i z a c i ó n d e l h i s t ó r i c o d e d a t o s d e la i n f o r m a c i ó n p r o c e d e n t e d e lo s e q u i p o s d e m o n i t o r i z a c i ó n ( 3 ) , e l v e c t o r d e o b je t i v o s d e l a s v a r i a b l e s m o n i t o r i z a d a s ( 8 ) , v e c t o r d e v a r i a b l e s f i l t r a d a s d e m o n i t o r i z a c i ó n ( 10 ) , v e c t o r e s d e lo s e r r o r e s d e c o n t r o l ( 12, 13, 14 ) , v e c t o r d e p e r f u s i o n e s d e c o n t r o l ( 15 ) , v e c t o r d e c o r r e c c i ó n ( 18 ) , v e c t o r d e c o n t r o l f i a b l e ( 20 ) y v e c t o r d e p e r f u s i ó n d e f á r m a c o s a n e s t é s i c o s ( 5 ) r e a l i z a d a s p o r e l s i s t e m a d e b o m b a s d e p e r f u s i ó n ( 2 ) y d e l c ó d ig o i n f o r m á t i c o b a s a d o e n l a s i n s t r u c c i o n e s n e c e s a r i a s p a r a e j e c u t a r e l m é t o d o S y n P l D e n u n p r o c e s a d o r ; 2 . C ontador : U n c o n t a d o r d e t i e m p o s e l e c t r ó n i c o p a r a d e t e r m i n a r l a s f a s e s I P h, M P h y R P h, e s t i m a n d o q u e la I P h d u r a e n t r e 5 y 10 m i n u t o s, q u e la M P h e s m u y v a r i a b l e e n d u r a c i ó n e n f u n c i ó n d e la c i r u g í a y q u e la R P h d u r a e n t r e 10 y 20 m i n u t o s ; e s t e c o n t a d o r i m p l e m e n t a e l s i s t e m a d e c o n m u t a c i ó n ( 23 ) e n f o r m a d e c ó d i g o i n f o r m á t i c o y l a s i n s t r u c c i o n e s p e r t i n e n t e s p a r a e j e c u t a r l a s e n e l p r o c e s a d o r ; 3 . A juste : U n a r u t i n a s o f t w a r e q u e s e e j e c u t a e n e l t i e m p o tm p a r a a j u s t a r lo s p a r á m e t r o s d e l s i s t e m a d e c o n t r o l S y n P I D a c a d a p a c i e n t e ( 1 ) h a c ie n d o u s o d e l a s a c c i o n e s m o s t r a d a s e n la E c u a c i ó n 14 y d e la m e m o r i a d e l s i s t e m a ; 4 . Rutina 1 : R u t i n a s o f t w a r e r e u t i l i z a b l e p a r a la i m p l e m e n t a c i ó n d e l b a n c o d e f i l t r o s ( 9 ) h a c i e n d o u s o d e la m a t r i z d e g a n a n c i a s [KD] m o s t r a d a e n la e c u a c i ó n [ 5 . 6 ] y d e l c o e f i c i e n t e d e f i l t r a d o N p r e s e n t a d o e n la e c u a c i ó n [ 3. 4 ] ; la r u t i n a p u e d e s e r e j e c u t a d a v a r i a s v e c e s c o n p a r á m e t r o s d e e n t r a d a m o d i f i c a b l e s, la r u t i n a h a c e u s o d e la i n f o r m a c i ó n a l m a c e n a d a e n la m e m o r i a ; . Rutina 2 : R u t i n a s o f t w a r e r e u t i l i z a b l e p a r a la i m p l e m e n t a c i ó n d e l g e n e r a d o r d e e r r o r e s d e c o n t r o l ( 1 1 ) h a c i e n d o u s o d e l o s e l e m e n t o s d e l a s m a t r i c e s [B] y [G] d a d a s e n l a s e c u a c i o n e s [ 4. 3 ] y [ 4 . 5 ], c u y o s v a l o r e s e s t á n c o m p r e n d i d o s e n t r e 1 y 2 ; s e i m p l e m e n t a u n a s o l a r u t i n a c o n e l c ó d i g o d e o b t e n c i ó n d e l o s v e c t o r e s d e l o s e r r o r e s d e c o n t r o l ( 12, 13, 14 ) , la r u t i n a p u e d e s e r e j e c u t a d a v a r i a s v e c e s c o n p a r á m e t r o s d e e n t r a d a m o d i f i c a b l e s, la r u t i n a h a c e u s o d e la i n f o r m a c i ó n a l m a c e n a d a e n la m e m o r i a ; . Rutina 3 : R u t i n a s o f t w a r e r e u t i l i z a b l e p a r a la i m p l e m e n t a c i ó n d e l c o n t r o l a d o r m u l t i v a r i a b l e y c o n s i n e r g i a M I M O - P I D ( 16 ) h a c ie n d o u s o d e l o s c o n t r o l a d o r e s S I S O -P I D d e f i n i d o s e n l a s e c u a c i o n e s [ 5 . 14 ] y [ 5. 15 ] ; s e i m p l e m e n t a u n a s o l a r u t i n a c o n e l c ó d i g o d e e j e c u c i ó n d e c a d a c o n t r o l a d o r S I S O - P I D q u e f o r m a n l o s t r e s s u b s i s t e m a s d e c o n t r o l M I S O - P I D ( 25, 26, 27 ) y q u e a s u v e z f o r m a n e l c o n t r o l a d o r m u l t i v a r i a b l e y c o n s i n e r g i a M I M O - P I D ( 16 ) , la r u t i n a p u e d e s e r e j e c u t a d a v a r i a s v e c e s c o n p a r á m e t r o s d e e n t r a d a m o d i f i c a b l e s, la r u t i n a h a c e u s o d e la i n f o r m a c i ó n a l m a c e n a d a e n la m e m o r i a ; . Rutina 4 : R u t i n a s o f t w a r e q u e c a l c u l e e l v e c t o r d e p e r f u s i o n e s d e c o n t r o l ( 1 5 ) c o n l o s r e s u l t a d o s o b t e n i d o s d e a p l i c a r la R u t i n a 3 r e la t i v a a l o s r e s u l t a d o s d e l o s c o n t r o l a d o r e s S I S O - P I D y d e l v e c t o r d e p e r f u s i o n e s d e l p r o t o c o l o m a n u a l ( 4 ) , m o s t r a d o s e n la s e c u a c i o n e s [ 5. 14 ] y [ 2. 4 ] [ 2. 5 ] ; s e i m p l e m e n t a u n a s o l a r u t i n a c o n e l c ó d i g o d e e j e c u c i ó n d e o b t e n e r e l v e c t o r d e p e r f u s i o n e s d e c o n t r o l ( 15 ) , la r u t i n a h a c e u s o d e la i n f o r m a c i ó n a l m a c e n a d a e n la m e m o r i a ; . Rutina 5 : R u t i n a s o f t w a r e r e u t i l i z a b l e p a r a la i m p l e m e n t a c i ó n d e l s i s t e m a c o r r e c t o r d e p e r f u s i o n e s ( 17 ) h a c i e n d o u s o d e l v e c t o r d e v a r i a b l e s f i l t r a d a s d e m o n i t o r i z a c i ó n ( 10 ) m o s t r a d o e n la e c u a c i ó n [ 3. 2 ], h a c i e n d o u s o d e l a s f r e c u e n c i a s d e c o r t e d e f i n i d a s e n la s e c u a c i o n e s [ 3. 3 ] y [ 3. 4 ] ; s e i m p l e m e n t a u n a s o l a r u t i n a c o n e l c ó d i g o d e e j e c u c i ó n d e l s i s t e m a c o r r e c t o r d e p e r f u s i o n e s ( 17 ) , la r u t i n a p u e d e s e r e j e c u t a d a v a r i a s v e c e s c o n p a r á m e t r o s d e e n t r a d a m o d i f i c a b l e s, la r u t i n a h a c e u s o d e la i n f o r m a c i ó n a l m a c e n a d a e n la m e m o r i a ; . Rutina 6 : R u t i n a s o f t w a r e r e u t i l i z a b l e p a r a la i m p l e m e n t a c i ó n d e l s i s t e m a d e s e g u r i d a d ( 19 ) h a c i e n d o u s o d e l v e c t o r d e p e r f u s i o n e s d e c o n t r o l ( 15 ) m o s t r a d o e n la s e c u a c i o n e s [ 6. 1 ] y [ 6 . 2 ], s e i m p l e m e n t a u n a s o l a r u t i n a c o n e l c ó d i g o d e e j e c u c i ó n d e l s i s t e m a d e s e g u r i d a d ( 19 ) , la r u t i n a p u e d e s e r e j e c u t a d a v a r i a s v e c e s c o n p a r á m e t r o s d e e n t r a d a m o d i f i c a b l e s, la r u t i n a h a c e u s o d e la i n f o r m a c i ó n a l m a c e n a d a e n la m e m o r i a ; 0 . Rutina 7 : R u t i n a s o f t w a r e r e u t i l i z a b l e p a r a la i m p l e m e n t a c i ó n d e l s i s t e m a c u a n t i f i c a d o r ( 21 ) h a c i e n d o u s o d e l v e c t o r d e c o n t r o l f i a b l e ( 20 ) m o s t r a d o s e n l a s e c u a c i o n e s [ 7. 1 ] y [ 7 . 2 ], s e i m p l e m e n t a u n a s o l a r u t i n a c o n e l c ó d i g o d e e j e c u c i ó n e l s i s t e m a c u a n t i f i c a d o r ( 21 ) , la r u t i n a p u e d e s e r e j e c u t a d a v a r i a s v e c e s c o n p a r á m e t r o s d e e n t r a d a m o d i f i c a b l e s, la r u t i n a h a c e u s o d e la i n f o r m a c i ó n a l m a c e n a d a e n la m e m o r i a .
Publicaciones:
ES2808969 (02/03/2021) - A1 Solicitud de patente con informe sobre el estado de la técnica
ES2808969 (11/10/2022) - B2 Patente de invención con examen
Eventos:
En fecha 23/04/2020 se realizó Registro Instancia de Solicitud
En fecha 23/04/2020 se realizó PETEX_Petición de examen sustantivo
En fecha 23/04/2020 se realizó Admisión a Trámite
En fecha 23/04/2020 se realizó Aceptación Tramitación CAP
En fecha 23/04/2020 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 27/04/2020 se realizó Superado examen de oficio
En fecha 16/02/2021 se realizó Realizado IET
En fecha 23/02/2021 se realizó 1109P_Comunicación Traslado del IET
En fecha 02/03/2021 se realizó Publicación Solicitud
En fecha 02/03/2021 se realizó Publicación Folleto Solicitud con IET (A1)
En fecha 27/05/2021 se realizó Registro Documentación no Identificada
En fecha 27/05/2021 se realizó 5215P_Observaciones del solicitante al IET, Opinión Escrita y/o alegaciones a observaciones de terceros
En fecha 17/06/2021 se realizó Validación petición y/o pago de examen sustantivo conforme
En fecha 27/01/2022 se realizó 3411X_Alta Mandatarios
En fecha 27/01/2022 se realizó Alta mandatario
En fecha 01/04/2022 se realizó El solicitante ha contestado pero existen nuevas objeciones a la concesión de la solicitud
En fecha 01/04/2022 se realizó Elaboración de examen sustantivo
En fecha 01/04/2022 se realizó 6120P_Notificación de examen sustantivo
En fecha 07/04/2022 se realizó Publicación de examen sustantivo
En fecha 06/06/2022 se realizó 5127P_Subsanación a defectos en examen sustantivo
En fecha 24/09/2022 se realizó Designación de Comisión de Expertos
En fecha 27/09/2022 se realizó Finalización de Examen Sustantivo
En fecha 27/09/2022 se realizó 6121P_Comunicación finalización de examen sustantivo
En fecha 03/10/2022 se realizó Publicación finalización de examen sustantivo
En fecha 04/10/2022 se realizó Concesión con examen sustantivo
En fecha 04/10/2022 se realizó Entrega título
En fecha 04/10/2022 se realizó 6125P_Notificación de concesión con examen sustantivo
En fecha 11/10/2022 se realizó Publicación concesión Patente
En fecha 11/10/2022 se realizó Publicación Folleto Concesión
En fecha 11/04/2023 se realizó Plazo expirado presentación de oposiciones contra la concesión de la Patente
Pagos:
23/04/2020 - Pago Tasas IET
21/10/2022 - Pago 03 Anualidad
18/05/2023 - Pago 04 Anualidad
Fuente de la información
Parte de la información aquí publicada es pública puesto que ha sido obtenida de la Oficina de Propiedad Industrial de los diferentes países el 25/04/2024 y por lo tanto puede ser que la información no esté actualizada.Parte de la información aquí mostrada ha sido calculada por nuestro sistema informático y puede no ser veraz.
Privacidad
Si considera que al información aquí publicada afecta a su privacidad y desea que eliminemos la información aquí publicada envíe un email a info@patentes-y-marcas.com o rellene el formulario que encontrará aquí.Información sobre el registro de patente nacional por SISTEMA DE PERFUSIÓN DE FÁRMACOS EN LAZO CERRADO CON CONTROL SINÉRGICO con el número P202030337
El registro de patente nacional por SISTEMA DE PERFUSIÓN DE FÁRMACOS EN LAZO CERRADO CON CONTROL SINÉRGICO con el número P202030337 fue solicitada el 23/04/2020. Se trata de un registro en España por lo que este registro no ofrece protección en el resto de países. El registro SISTEMA DE PERFUSIÓN DE FÁRMACOS EN LAZO CERRADO CON CONTROL SINÉRGICO con el número P202030337 fue solicitada por UNIVERSIDAD POLITÉCNICA DE MADRID mediante los servicios del agente ELZABURU, S.L.P. El registro [modality] por SISTEMA DE PERFUSIÓN DE FÁRMACOS EN LAZO CERRADO CON CONTROL SINÉRGICO con el número P202030337 está clasificado como A61B 5/00,A61M 5/172,G16H 20/17 según la clasificación internacional de patentes.
Otras invenciones solicitadas en la clasificación internacional de patentes A61B 5/00,A61M 5/172,G16H 20/17.
Es posible conocer invenciones similares al campo de la técnica se refiere. El registro de patente nacional por SISTEMA DE PERFUSIÓN DE FÁRMACOS EN LAZO CERRADO CON CONTROL SINÉRGICO con el número P202030337 está clasificado con la clasificación A61B 5/00,A61M 5/172,G16H 20/17 por lo que si se desea conocer más registros con la clasificación A61B 5/00,A61M 5/172,G16H 20/17 clicar aquí.Otras invenciones solicitadas a través del representante ELZABURU, S.L.P
Es posible conocer todas las invenciones solicitadas a través del agente ELZABURU, S.L.P entre las que se encuentra el registro patente nacional por SISTEMA DE PERFUSIÓN DE FÁRMACOS EN LAZO CERRADO CON CONTROL SINÉRGICO con el número P202030337. Si se desean conocer más invenciones solicitadas a través del agente ELZABURU, S.L.P clicar aquí.Patentes en España
Es posible conocer todas las invenciones publicadas en España entre las que se encuentra el registro patente nacional por SISTEMA DE PERFUSIÓN DE FÁRMACOS EN LAZO CERRADO CON CONTROL SINÉRGICO. Nuestro portal www.patentes-y-marcas.com ofrece acceso a las publicaciones de patentes en España. Conocer las patentes registradas en un país es importante para saber las posibilidades de fabricar, vender o explotar una invención en España.Patentes registradas en la clase A
Es posible conocer todas las patentes registradas en la clase A (NECESIDADES CORRIENTES DE LA VIDA) entre las que se encuentra la patente SISTEMA DE PERFUSIÓN DE FÁRMACOS EN LAZO CERRADO CON CONTROL SINÉRGICO con el número P202030337. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase A61
Es posible conocer todas las patentes registradas en la clase A61 (CIENCIAS MEDICAS O VETERINARIAS; HIGIENE) entre las que se encuentra la patente SISTEMA DE PERFUSIÓN DE FÁRMACOS EN LAZO CERRADO CON CONTROL SINÉRGICO con el número P202030337. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase A61B
Es posible conocer todas las patentes registradas en la clase A61B (DIAGNOSTICO; CIRUGIA; IDENTIFICACION) entre las que se encuentra la patente SISTEMA DE PERFUSIÓN DE FÁRMACOS EN LAZO CERRADO CON CONTROL SINÉRGICO con el número P202030337. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase A61M
Es posible conocer todas las patentes registradas en la clase A61M (DISPOSITIVOS PARA INTRODUCIR AGENTES EN EL CUERPO O PARA DEPOSITARLOS SOBRE EL MISMO) entre las que se encuentra la patente SISTEMA DE PERFUSIÓN DE FÁRMACOS EN LAZO CERRADO CON CONTROL SINÉRGICO con el número P202030337. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase G
Es posible conocer todas las patentes registradas en la clase G (FISICA) entre las que se encuentra la patente SISTEMA DE PERFUSIÓN DE FÁRMACOS EN LAZO CERRADO CON CONTROL SINÉRGICO con el número P202030337. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase G16
Es posible conocer todas las patentes registradas en la clase G16 (TECNOLOGÍAS DE LA INFORMACIÓN Y DE LA COMUNICACIÓN [TIC] ESPECIALMENTE ADAPTADAS PARA ÁREAS DE APLIC) entre las que se encuentra la patente SISTEMA DE PERFUSIÓN DE FÁRMACOS EN LAZO CERRADO CON CONTROL SINÉRGICO con el número P202030337. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase G16H
Es posible conocer todas las patentes registradas en la clase G16H (INFORMÁTICA PARA LA ATENCIÓN SANITARIA, p. ej. TECNOLOGÍAS DE LA INFORMACIÓN Y DE LA COMUNICACIÓN [T) entre las que se encuentra la patente SISTEMA DE PERFUSIÓN DE FÁRMACOS EN LAZO CERRADO CON CONTROL SINÉRGICO con el número P202030337. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.
¿Tienes alguna duda?
Escribe tu consulta y te responderemos rápida y gratuitamente.

Otras patentes similares
 P202030328
P202030328
Uso de ésteres de (Z)-3-hexenilo y método para proteger plantas frente a plagas
P202030330
Profesionales Recomendados
Barcelona
933182440
España
933182440
España

Barcelona
+34 93 362 16 97
España
+34 93 362 16 97
España

Barcelona
932 593 600
España
932 593 600
España







