


- Home /
- Publicaciones de patentes /
- APARATO DE MASAJE CORPORAL
Patente nacional por "APARATO DE MASAJE CORPORAL"
Este registro ha sido solicitado por
TERMOSALUD, S.L.
a través del representanteISABEL CARVAJAL Y URQUIJO
Contacto
- Estado: A punto de caducar
- País:
- España
- Fecha solicitud:
- 27/04/2020
- Número solicitud:
-
P202030355
- Número publicación:
-
ES2798315
- Fecha de concesión:
-
11/05/2021
- Inventores:
-
Persona física
- Datos del titular:
-
Termosalud, S.L.
- Datos del representante:
-
Isabel Carvajal y Urquijo
- Clasificación Internacional de Patentes:
- A61H 15/00,A61H 15/02
- Clasificación Internacional de Patentes de la publicación:
- A61H 15/00,A61H 15/02
- Fecha de vencimiento:
Quiero registrar una patente

Reivindicaciones:
+ ES-2798315_B21 Aparato de masaje corporal que comprende: un man�pulo (10) que comprende una pluralidad de cabezales m�viles (2) para aplicar fuerza sobre el cuerpo de un paciente y un brazo de masaje (1) conectado con los cabezales m�viles (2) ; un motor (4) acoplado mec�nicamente con la pluralidad de cabezales m�viles (2) para impartirles movimiento; caracterizado por que el aparato comprende adem�s: unos medios de medici�n que comprenden un sensor de fuerza vertical (15) configurado para medir la fuerza aplicada perpendicularmente sobre el cuerpo del paciente, y un sensor de par de torsi�n (14) configurado para medir la resistencia al giro de los cabezales m�viles (2) sobre el cuerpo del paciente; un generador de radiaci�n electromagn�tica (12) configurado para generar radiaci�n electromagn�tica con una frecuencia y con una intensidad fijadas, donde los cabezales m�viles (2) est�n conectados el�ctricamente con el generador de radiaci�n electromagn�tica (12) para recibir la radiaci�n electromagn�tica y aplicarla sobre el cuerpo del paciente; una unidad de proceso (13) configurada para recibir informaci�n de los medios de medici�n y estimar la profundidad efectiva del tratamiento en el cuerpo del paciente; donde la unidad de proceso (13) est� configurada para determinar en tiempo real, si, para la profundidad efectiva, la fuerza vertical aplicada es adecuada. 2.- Aparato de masaje seg�n la reivindicaci�n 1, donde los medios de medici�n comprenden adem�s un sensor de temperatura (8) , de forma que la unidad de proceso (13) determina si la temperatura es adecuada cuando est� dentro de un rango prefijado. 3.- Aparato de masaje seg�n la reivindicaci�n 1 o 2, que comprende adem�s un indicador (17) para avisar si la fuerza vertical, la torsi�n y/o la temperatura es adecuada. 4.- Aparato de masaje seg�n la reivindicaci�n 3, donde la unidad de proceso (13) est� configurada para actuar sobre el motor (4) si la fuerza vertical o la torsi�n no es adecuada. 5.- Aparato de masaje seg�n una cualquiera de las reivindicaciones anteriores 2 a 4, donde la unidad de proceso (13) est� configurada para actuar sobre el generador de radiaci�n electromagn�tica (12) si temperatura no es adecuada. 6.- Aparato de masaje seg�n una cualquiera de las reivindicaciones anteriores, que comprende adem�s una interfaz (16) para fijar valores al menos para el par de torsi�n, frecuencia y la intensidad de la radiaci�n electromagn�tica. 7.- Aparato de masaje seg�n una cualquiera de las reivindicaciones anteriores, donde la radiaci�n electromagn�tica generada es una onda modulada a una frecuencia de valor comprendido entre 10 Hz y 40 KHz. 8.- Aparato de masaje seg�n la reivindicaci�n 7, donde la modulaci�n es por ancho de pulso. 9.- Aparato de masaje seg�n una cualquiera de las reivindicaciones anteriores, en el que los cabezales (2) tienen forma esf�rica. 10.- Aparato de masaje seg�n una cualquiera de las reivindicaciones anteriores, que comprende adem�s una fuente de alimentaci�n (12) configurada para suministrar energ�a a los medios de generaci�n de radiaci�n electromagn�tica (12) y al motor (4) . 11.- Aparato de masaje seg�n la reivindicaci�n 10, donde la fuente de alimentaci�n (12) est� alojada junto con separadamente del man�pulo (10) . 12.- Aparato de masaje seg�n una cualquiera de las reivindicaciones anteriores, donde para estimar la profundidad efectiva del tratamiento, la unidad de proceso (13) comprende un registro que almacena al menos valores de fuerza vertical, par de torsi�n y los relaciona con un valor de profundidad efectiva para el paciente.
+ ES-2798315_A11 Aparato de masaje corporal que comprende: un man�pulo (10) que comprende una pluralidad de cabezales m�viles (2) para aplicar fuerza sobre el cuerpo de un paciente y un brazo de masaje (1) conectado con los cabezales m�viles (2) ; un motor (4) acoplado mec�nicamente con la pluralidad de cabezales m�viles (2) para impartirles movimiento; caracterizado por que el aparato comprende adem�s: unos medios de medici�n que comprenden un sensor de fuerza vertical (15) configurado para medir la fuerza aplicada perpendicularmente sobre el cuerpo del paciente, y un sensor de par de torsi�n (14) configurado para medir la resistencia al giro de los cabezales m�viles (2) sobre el cuerpo del paciente; un generador de radiaci�n electromagn�tica (12) configurado para generar radiaci�n electromagn�tica con una frecuencia y con una intensidad fijadas, donde los cabezales m�viles (2) est�n conectados el�ctricamente con el generador de radiaci�n electromagn�tica (12) para recibir la radiaci�n electromagn�tica y aplicarla sobre el cuerpo del paciente; una unidad de proceso (13) configurada para recibir informaci�n de los medios de medici�n y estimar la profundidad efectiva del tratamiento en el cuerpo del paciente; donde la unidad de proceso (13) est� configurada para determinar en tiempo real, si, para la profundidad efectiva, la fuerza vertical aplicada es adecuada. 2.- Aparato de masaje seg�n la reivindicaci�n 1, donde los medios de medici�n comprenden adem�s un sensor de temperatura (8) , de forma que la unidad de proceso (13) determina si la temperatura es adecuada cuando est� dentro de un rango prefijado. 3.- Aparato de masaje seg�n la reivindicaci�n 1 o 2, que comprende adem�s un indicador (17) para avisar si la fuerza vertical, la torsi�n y/o la temperatura es adecuada. 4.- Aparato de masaje seg�n la reivindicaci�n 3, donde la unidad de proceso (13) est� configurada para actuar sobre el motor (4) si la fuerza vertical o la torsi�n no es adecuada. 5.- Aparato de masaje seg�n una cualquiera de las reivindicaciones anteriores 2 a 4, donde la unidad de proceso (13) est� configurada para actuar sobre el generador de radiaci�n electromagn�tica (12) si temperatura no es adecuada. 6.- Aparato de masaje seg�n una cualquiera de las reivindicaciones anteriores, que comprende adem�s una interfaz (16) para fijar valores al menos para el par de torsi�n, frecuencia y la intensidad de la radiaci�n electromagn�tica. 7.- Aparato de masaje seg�n una cualquiera de las reivindicaciones anteriores, donde la radiaci�n electromagn�tica generada es una onda modulada a una frecuencia de valor comprendido entre 10 Hz y 40 KHz. 8.- Aparato de masaje seg�n la reivindicaci�n 7, donde la modulaci�n es por ancho de pulso. 9.- Aparato de masaje seg�n una cualquiera de las reivindicaciones anteriores, en el que los cabezales (2) tienen forma esf�rica. 10.- Aparato de masaje seg�n una cualquiera de las reivindicaciones anteriores, que comprende adem�s una fuente de alimentaci�n (12) configurada para suministrar energ�a a los medios de generaci�n de radiaci�n electromagn�tica (12) y al motor (4) . 11.- Aparato de masaje seg�n la reivindicaci�n 10, donde la fuente de alimentaci�n (12) est� alojada junto con separadamente del man�pulo (10) . 12.- Aparato de masaje seg�n una cualquiera de las reivindicaciones anteriores, donde para estimar la profundidad efectiva del tratamiento, la unidad de proceso (13) comprende un registro que almacena al menos valores de fuerza vertical, par de torsi�n y los relaciona con un valor de profundidad efectiva para el paciente.
Los productos y servicios protegidos por este registro son:
A61H 15/00 - A61H 15/02
Descripciones:
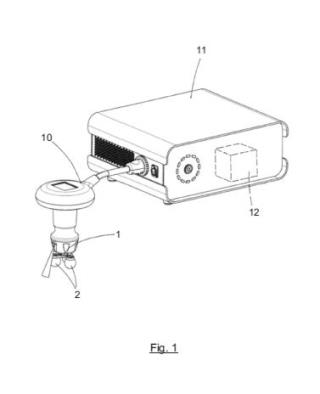
+ ES-2798315_B2 APARATO DE MASAJE CORPORAL CAMPO DE LA INVENCI�N La presente invenci�n se enmarca dentro de los aparatos que se utilizan para dar masajes a los pacientes, especialmente aquellos que disponen de una fuente adicional de energ�a para mejorar el efecto de dichos masajes, e incorporando la monitorizaci�n de la profundidad efectiva del tratamiento. ANTECEDENTES DE LA INVENCI�N Existen numerosos aparatos de masajes, que proporcionan al usuario la capacidad de aplicar un masaje de manera homog�nea y sin provocar cansancio en el terapeuta. Algunos aparatos de masaje que emplean escobillas, engranajes, cadenas de transmisi�n generan un rozamiento excesivo que afecta negativamente en la eficacia del masaje. Otros aparatos comprenden un man�pulo, es decir un soporte para usar con la mano del terapeuta que dispone de una serie de elementos esf�ricos (tambi�n llamados cabezales) que presionan el cuerpo del paciente cuando se realiza el masaje. Este man�pulo termina en un brazo de masaje que comprende los elementos esf�ricos, que pueden rotar mientras se desplazan por el cuerpo del paciente, mejorando el efecto del masaje. En ocasiones, existen sensores para la fuerza vertical aplicada. Recientemente, han aparecido aparatos de masaje que utilizan una fuente de calor para acompa�arlos movimientos del masaje. Esta fuente de calor suele ser en forma de radiaci�n infrarroja o corrientes por efecto Joule. Debido a este calor, se mejora el efecto del masaje, ya que se consigue una mejor preparaci�n del tejido conectivo. DESCRIPCI�N BREVE DE LA INVENCI�N A pesar de los avances mencionados, hay lugar para la mejora en los aparatos existentes. Los aparatos existentes omiten par�metros importantes para el tratamiento incluso aquellos que combinan masaje rotativo y radiaci�n electromagn�tica. Los cabezales m�viles aplican un masaje rotativo con mucho menor esfuerzo del terapeuta, incluso manteniendo est�tico el man�pulo del aparato de masaje. La presente invenci�n aplica masaje rotativo y hace uso del par�metro profundidad efectiva, que se entiende como la distancia a la que es conveniente llegar con el masaje. Determinar la profundidad efectiva no es trivial. Aunque existen soluciones capaces de detectar la fuerza vertical aplicada en un tratamiento, esta informaci�n por s� sola no permite identificarla profundidad efectiva. Seg�n las caracter�sticas del paciente (por ejemplo, grueso o delgado) y tambi�n de la zona concreta del cuerpo, la profundidad efectiva var�a. La capa de grasa que hay bajo la piel es el principal factor en la profundidad efectiva, aunque no el �nico. Se ha encontrado que la profundidad efectiva est� condicionada adem�s por factores como la elasticidad de la piel, hidrataci�n o rozamiento del cabezal sobre la zona a aplicar. En suma, el terapeuta seg�n su experiencia subjetiva debe juzgar si el masaje se realiza a profundidad y/o presi�n apropiadas. Para atender a las limitaciones identificadas, se plantea la presente invenci�n que propone un aparato de masaje corporal que monitoriza la efectividad del tratamiento mediante las caracter�sticas t�cnicas de la reivindicaci�n principal. El aparato de masaje dispone de un man�pulo que comprende una pluralidad de cabezales m�viles para aplicar fuerza sobre el cuerpo de un paciente y un brazo de masaje conectado con los cabezales m�viles. Incluye un motor acoplado mec�nicamente con los cabezales m�viles para impartirles movimiento. Incluye unos medios de medici�n que comprenden un sensor de fuerza vertical para medir la fuerza aplicada perpendicularmente sobre el cuerpo del paciente, y un sensor de par de torsi�n para medir la resistencia al giro de los cabezales m�viles sobre el cuerpo del paciente. Opcionalmente, puede incorporar un term�metro para tomar la temperatura de la zona del cuerpo del paciente donde se aplican los cabezales. Incluye un generador de radiaci�n electromagn�tica para generar radiaci�n electromagn�tica con una frecuencia y con una intensidad fijadas, y aplicarla sobre el cuerpo del paciente a trav�s de los cabezales m�viles. Incluye una unidad de proceso que, con la informaci�n de los medios de medici�n, estima la profundidad efectiva del tratamiento en el cuerpo del paciente. La unidad de proceso determina en tiempo real, si, para la profundidad efectiva estimada, la fuerza aplicada es adecuada. A menos que se defina de otra manera, todos los t�rminos (tanto los cient�ficos como los t�cnicos) que se usan en este documento han de ser interpretados como lo har�a un experto en la materia. Se entender�, por tanto, que los t�rminos de uso com�n deben ser interpretados de la manera que lo har�a un conocedor de la materia, y no de un modo idealizado o estrictamente formal. A lo largo del texto, la palabra "comprende" (y sus derivados, como "comprendiendo") no deben ser entendidos de un modo excluyente, sino que deben ser entendidos en el sentido en que admiten la posibilidad de que lo definido pueda incluir elementos o etapas adicionales. DESCRIPCI�N DE LAS FIGURAS A continuaci�n, se presenta una descripci�n breve de cada una de las figuras usadas para completar la descripci�n de la invenci�n que sigue. Dichas figuras se relacionan con realizaciones de la invenci�n, que se presentan como ejemplos no limitativos de la misma. La FIG.1 muestra una vista general de un aparato de masaje de acuerdo con la invenci�n. La FIG.2 comprende una vista en secci�n del man�pulo mostrado en la figura anterior, para una mejor comprensi�n de su funcionamiento. La FIG. 3 es un diagrama de bloques de la invenci�n. La FIG. 4 ilustra una gr�fica que sirve para relacionar variables Referencias num�ricas utilizadas en las figuras 1 Brazo de masaje 2 Cabezales m�viles 3 Cable conductor 4 Motorreductor 5 Aislante el�ctrico 6 Elemento est�tico del conjunto de transmisi�n (corona) 7a Rodamiento del elemento din�mico del conjunto de transmisi�n 7b Pieza de acople del elemento din�mico del conjunto de transmisi�n 8 Sensor de temperatura 9 Im�n de fijaci�n 10 Man�pulo 11 Fuente de alimentaci�n 12 Unidad generadora de radiaci�n electromagn�tica 13 Unidad de proceso 14 Sensor de par de torsi�n 15 Sensor de fuerza vertical 16 Interfaz 17 Indicador 18 Panel de mando DESCRIPCI�N DETALLADA DE LA INVENCI�N Se procede a continuaci�n a describir distintos aspectos de un ejemplo de realizaci�n de la presente invenci�n, con fines meramente ilustrativos y no limitativos. La FIG. 1 muestra una vista general de un aparato de masaje, que incluye una fuente de alimentaci�n 11, que comprende una unidad generadora de ondas electromagn�ticas 12, un man�pulo 10, que est� conectado a la fuente de alimentaci�n 11. Este man�pulo 10, sirve de apoyo para que el terapeuta pueda realizar un masaje sobre un paciente. El man�pulo 10 comprende a su vez diversos elementos que contribuyen al fin de la invenci�n. En esta figura general, se observa un brazo de masaje 1 con una serie de cabezales 2 aplicadores de masaje. Estos cabezales 2 est�n destinados a presionar el cuerpo del paciente, para lo cual comprenden una superficie esf�rica, de modo que se favorezca el contacto. Adem�s de presionar, por los cabezales 2 reciben energ�a en ondas de radiaci�n electromagn�tica que es emitida directamente sobre el cuerpo del paciente. El hecho de que dicha radiaci�n electromagn�tica sea emitida directamente por los cabezales 2 m�viles, en lugar de por un soporte est�tico tiene un efecto muy ventajoso sobre el tratamiento, logrando una sinergia terap�utica que potencia los resultados de cada efecto por separado. Por un lado, se potencia la activaci�n mec�nica de distintas c�lulas y tejidos y por otro se mejora el flujo perif�rico y linf�tico debido a la aplicaci�n de calor exactamente en la regi�n en la que se est� produciendo la activaci�n mec�nica. Al mismo tiempo, el efecto el�ctrico del paso de ondas electromagn�ticas por la piel produce una estimulaci�n bioqu�mica que favorece la eliminaci�n de las grasas e inhibe su acumulaci�n. Adem�s, estimula las c�lulas productoras de fibras el�sticas. En realizaciones particulares, la fuente de ondas electromagn�ticas se modula con una se�al moduladora de baja frecuencia (10Hz a 40KHz) . Esta modulaci�n puede hacerse mediante el control de ancho de pulso. Fisiol�gicamente, la modulaci�n de la se�al portadora de ondas electromagn�ticas genera un aumento de la permeabilidad de las membranas plasm�ticas celulares. Por un lado, se favorece la correcta difusi�n de sustancias entre los espacios extracelulares y las propias c�lulas; y por otro lado, se mejora la capacidad de intercambio de los capilares linf�ticos. Estos dos efectos facilitan los procesos de captaci�n de nutrientes y ox�geno y los procesos de excreci�n de sustancias de desecho al medio extracelular. Un aumento de la permeabilidad celular en los capilares linf�ticos facilita retirar de manera m�s eficaz los etabolitos excretados al espacio intersticial, reduciendo la inflamaci�n y sus consecuencias. La FIG. 2 comprende una vista en secci�n de una realizaci�n particular del man�pulo 10 mostrado en la figura anterior, para una mejor comprensi�n de su funcionamiento mec�nico y el�ctrico. En primer lugar, se analiza la conexi�n mec�nica que posibilita el giro de los cabezales m�viles 2. El man�pulo 10 comprende un motor, motorreductor el�ctrico 4, que se alimenta el�ctricamente a la m�quina. Este motorreductor el�ctrico 4 tiene un eje de salida cubierto por un aislante el�ctrico 5, que a su vez encaja en un elemento din�mico de transmisi�n. Este elemento din�mico de transmisi�n tiene la misi�n de transmitir el movimiento del motorreductor el�ctrico 4 al brazo de masaje 1, y est� formado por un rodamiento 7a y la pieza de acople al brazo de masaje 7b. Este rodamiento asegura el giro estable del brazo de masaje 1, mediante el apoyo sobre un elemento est�tico 6, que en este caso es una corona fijada a la parte inferior del man�pulo 10. En segundo lugar, se analizar� la conexi�n el�ctrica entre los elementos. La fuente de alimentaci�n 11 proporciona energ�a a un generador de ondas electromagn�ticas 12, capaz de modular convenientemente la portadora, y dicha onda es transmitida a lo largo de un cable conductor 3. Ventajosamente, el generador de ondas electromagn�ticas puede estar alojado en una m�quina separada del man�pulo 10. El cable conductor 3 discurre por la conexi�n entre la fuente de alimentaci�n 11, generador de ondas electromagn�ticas 12 y el man�pulo 10 hasta hacer contacto el�ctrico con un elemento est�tico la corona 6. Por lo tanto, el cable conductor 3 se encuentra libre de movimientos de rotaci�n, ya que ha discurrido por la parte est�tica del elemento actuador hasta hacer contacto con la corona 6. De este modo, se consigue la conexi�n el�ctrica entre el generador de ondas electromagn�ticas12 de la fuente de alimentaci�n 11 y la corona 6 del man�pulo 10. Tanto la corona 6 como el rodamiento 7a y la pieza de acople elementos actuadores de masaje 7b est�n fabricados en material conductor. Adem�s, los cabezales m�viles 2 est�n fabricados tambi�n en material conductor, por lo que se consigue que las ondas electromagn�ticas se transmitan hasta los mismos aplicadores de masaje 2. El brazo de masaje 1 que contiene a los cabezales m�viles 2 se fija a la pieza acople 7b por medio de un im�n 9. El sensor de par de torsi�n 14, mide la resistencia al giro, en una realizaci�n se realiza con un sensor de corriente incorporado en la placa electr�nica de control, que funciona tambi�n como una unidad de proceso 13. Combin�ndolo con el sensor de fuerza vertical 15 se computa, a trav�s de un algoritmo que se describe m�s adelante, para monitorizar de forma continua la profundidad efectiva en un interfaz de usuario para la interacci�n del terapeuta. La unidad de proceso 13, adem�s de aplicar la l�gica de control precisa, permite la interacci�n con el terapeuta a trav�s del interfaz 16, que contiene un panel de mando 18 para recibir la consigna de trabajo y monitorizar los par�metros de la sesi�n. Incluye un indicador 17, que mediante un pitido informa al terapeuta de errores o avisos que requieran su atenci�n durante el tratamiento. Por �ltimo, el man�pulo 10 tambi�n comprende un sensor de temperatura 8, que mide de forma continua la evoluci�n de la temperatura de la zona tratada del paciente, reflej�ndose en el interfaz 16 para ser consultada por el terapeuta. Esta temperatura debe estar comprendida en un rango establecido, generalmente, entre 42 �C y 45 �C para facilitar la correcta movilizaci�n de la grasa. La monitorizaci�n de la temperatura permite al terapeuta controlar que el tratamiento se realiza adecuadamente y con seguridad. Una temperatura superior a 45 �C puede ocasionar quemaduras. Una inferior a 42 �C no genera ning�n efecto sobre la grasa corporal. La FIG. 3 ilustra esquem�ticamente un diagrama de bloques de un aparato de masaje para mostrar las relaciones funcionales entre diferentes elementos. Se muestra un motor o motorreductor 4 que aplica movimiento de giro sobre los cabezales m�viles 2. Un conjunto de sensores que incluye el sensor de temperatura 8, el sensor de fuerza vertical 15 (fuerza vertical que ejerce el terapeuta) y el sensor de parde torsi�n 14. Estos sensores efect�an mediciones para conocer la fuerza vertical y par de torsi�n que imparten los cabezales m�viles 2 en el paciente. Estas mediciones son proporcionadas a la unidad de proceso 13. De otra parte, el generador de radiaci�n electromagn�tica 12 genera radiaci�n electromagn�tica con una frecuencia y con una intensidad seleccionadas previamente por el terapeuta seg�n el tipo de masaje, por ejemplo, con la interfaz 16. Las caracter�sticas de la radiaci�n generada se proporcionan a la unidad de proceso 13. Esta adiaci�n llega al paciente a trav�s de los cabezales m�viles 2. La unidad de proceso 13 analiza la informaci�n y establece si el masaje se est� aplicando adecuadamente al paciente. Para este fin, la unidad de proceso 13 calcula el mencionado par�metro denominado profundidad efectiva que informa de la profundidad del tratamiento. Este par�metro tiene un valor que es funci�n principalmente de la fuerza vertical aplicada, del par de torsi�n y de lacantidad de grasa. Tambi�n depende secundariamente de otras caracter�sticas del paciente, tales como hidrataci�n y firmeza de la piel. La unidad de proceso 13 se programa para controlar si la fuerza vertical que aplica el terapeuta es suficiente para llegar a la capa grasa del paciente. Una profundidad menor hace que no se alcance efectivamente la zona objeto donde est� la grasa, con lo que la grasa se lic�a con la radiaci�n electromagn�tica pero no se moviliza convenientemente. Una profundidad mayor hace que llegue a la zona muscular lo que no es adecuado, es doloroso e incluso peligroso. Dados los factores de los que dependen, la profundidad efectiva var�a mucho entre pacientes, por lo que la simple medida de fuerza vertical aplicada no es suficiente para determinar si se llega a la zona objeto. Por esto, para estimar esta profundidad efectiva, en una de las realizaciones se implementa un algoritmo desarrollado que relaciona diferentes variables tomando de forma emp�rica los valores. Para obtener la relaci�n entre los dos par�metros medidos, un terapeuta experimentado aplica el equipo a un paciente y determina cu�ndo est� en un rango de profundidad efectiva adecuada y con qu� medidas de fuerza vertical y resistencia al giro, obteniendo la siguiente tabla (columna: fuerza vertical, filas: par de torsi�n, resultado: profundidad efectiva en mm) : Esta tabla se puede complementar con m�s consideraciones, por ejemplo, caracter�sticas del paciente como edad, sexo, etc. para conseguir mayor selectividad. Mediante la determinaci�n de la profundidad efectiva, se evita incorporar un plic�metro para medir la grasa corporal, reduciendo la posibilidad de error en el proceso, al ser autom�ticamente generado por el sistema sin depender del terapeuta. La FIG. 4 ilustra una gr�fica que sirve para relacionarlas variables fuerza vertical, par de torsi�n y profundidad efectiva, correspondiente con los valores de la tabla. Observar que los valores de torsi�n y fuerza vertical son adimensionales, pues corresponden son porcentajes sobre el valor directo del sensor implementado en el equipo a partir del cual se tom� la tabla de forma emp�rica. Habitualmente, las realizaciones de la invenci�n permiten seleccionar la radiaci�n que va a ser aplicada en funci�n del tipo de paciente y/o tratamiento. Se monitoriza, durante la aplicaci�n del masaje, que el par de torsi�n sea el adecuado. En caso contrario, en algunas realizaciones se emite una se�al de aviso al terapeuta. Adicionalmente, se pueden definir tipos de pacientes seg�n su masa corporal: grueso, normal, delgado. Adicionalmente, se pueden definir zonas corporales donde se va a efectuar el tratamiento. Ciertas zonas tienen una mayor o menor tendencia a acumular grasa. Los anteriores son ejemplos para personalizar de una forma sencilla el tratamiento. En otras realizaciones, se puede implementar la relaci�n emp�rica anterior mediante f�rmulas equivalentes que asocien valores de fuerza vertical y par de torsi�n con la profundidad. En las realizaciones comentadas, el terapeuta es el que decide aplicar m�s o menos fuerza asistido por el aparato de masaje. En otras realizaciones se puede regular la fuerza de giro para controlar el par y as� mantener la profundidad efectiva del tratamiento independiente de la fuerza aplicada por el terapeuta, aunque en un rango de trabajo razonable, dando un aviso si no est� fuera del rango adecuado. En otras realizaciones m�s automatizadas se puede implementar un control de la fuerza vertical, aunque complicar�a el sistema mec�nico.
+ ES-2798315_A1 APARATO DE MASAJE CORPORAL CAMPO DE LA INVENCI�N La presente invenci�n se enmarca dentro de los aparatos que se utilizan para dar masajes a los pacientes, especialmente aquellos que disponen de una fuente adicional de energ�a para mejorar el efecto de dichos masajes, e incorporando la monitorizaci�n de la profundidad efectiva del tratamiento. ANTECEDENTES DE LA INVENCI�N Existen numerosos aparatos de masajes, que proporcionan al usuario la capacidad de aplicar un masaje de manera homog�nea y sin provocar cansancio en el terapeuta. Algunos aparatos de masaje que emplean escobillas, engranajes, cadenas de transmisi�n generan un rozamiento excesivo que afecta negativamente en la eficacia del masaje. Otros aparatos comprenden un man�pulo, es decir un soporte para usar con la mano del terapeuta que dispone de una serie de elementos esf�ricos (tambi�n llamados cabezales) que presionan el cuerpo del paciente cuando se realiza el masaje. Este man�pulo termina en un brazo de masaje que comprende los elementos esf�ricos, que pueden rotar mientras se desplazan por el cuerpo del paciente, mejorando el efecto del masaje. En ocasiones, existen sensores para la fuerza vertical aplicada. Recientemente, han aparecido aparatos de masaje que utilizan una fuente de calor para acompa�arlos movimientos del masaje. Esta fuente de calor suele ser en forma de radiaci�n infrarroja o corrientes por efecto Joule. Debido a este calor, se mejora el efecto del masaje, ya que se consigue una mejor preparaci�n del tejido conectivo. DESCRIPCI�N BREVE DE LA INVENCI�N A pesar de los avances mencionados, hay lugar para la mejora en los aparatos existentes. Los aparatos existentes omiten par�metros importantes para el tratamiento incluso aquellos que combinan masaje rotativo y radiaci�n electromagn�tica. Los cabezales m�viles aplican un masaje rotativo con mucho menor esfuerzo del terapeuta, incluso manteniendo est�tico el man�pulo del aparato de masaje. La presente invenci�n aplica masaje rotativo y hace uso del par�metro profundidad efectiva, que se entiende como la distancia a la que es conveniente llegar con el masaje. Determinar la profundidad efectiva no es trivial. Aunque existen soluciones capaces de detectar la fuerza vertical aplicada en un tratamiento, esta informaci�n por s� sola no permite identificarla profundidad efectiva. Seg�n las caracter�sticas del paciente (por ejemplo, grueso o delgado) y tambi�n de la zona concreta del cuerpo, la profundidad efectiva var�a. La capa de grasa que hay bajo la piel es el principal factor en la profundidad efectiva, aunque no el �nico. Se ha encontrado que la profundidad efectiva est� condicionada adem�s por factores como la elasticidad de la piel, hidrataci�n o rozamiento del cabezal sobre la zona a aplicar. En suma, el terapeuta seg�n su experiencia subjetiva debe juzgar si el masaje se realiza a profundidad y/o presi�n apropiadas. Para atender a las limitaciones identificadas, se plantea la presente invenci�n que propone un aparato de masaje corporal que monitoriza la efectividad del tratamiento mediante las caracter�sticas t�cnicas de la reivindicaci�n principal. El aparato de masaje dispone de un man�pulo que comprende una pluralidad de cabezales m�viles para aplicar fuerza sobre el cuerpo de un paciente y un brazo de masaje conectado con los cabezales m�viles. Incluye un motor acoplado mec�nicamente con los cabezales m�viles para impartirles movimiento. Incluye unos medios de medici�n que comprenden un sensor de fuerza vertical para medir la fuerza aplicada perpendicularmente sobre el cuerpo del paciente, y un sensor de par de torsi�n para medir la resistencia al giro de los cabezales m�viles sobre el cuerpo del paciente. Opcionalmente, puede incorporar un term�metro para tomar la temperatura de la zona del cuerpo del paciente donde se aplican los cabezales. Incluye un generador de radiaci�n electromagn�tica para generar radiaci�n electromagn�tica con una frecuencia y con una intensidad fijadas, y aplicarla sobre el cuerpo del paciente a trav�s de los cabezales m�viles. Incluye una unidad de proceso que, con la informaci�n de los medios de medici�n, estima la profundidad efectiva del tratamiento en el cuerpo del paciente. La unidad de proceso determina en tiempo real, si, para la profundidad efectiva estimada, la fuerza aplicada es adecuada. A menos que se defina de otra manera, todos los t�rminos (tanto los cient�ficos como los t�cnicos) que se usan en este documento han de ser interpretados como lo har�a un experto en la materia. Se entender�, por tanto, que los t�rminos de uso com�n deben ser interpretados de la manera que lo har�a un conocedor de la materia, y no de un modo idealizado o estrictamente formal. A lo largo del texto, la palabra "comprende" (y sus derivados, como "comprendiendo") no deben ser entendidos de un modo excluyente, sino que deben ser entendidos en el sentido en que admiten la posibilidad de que lo definido pueda incluir elementos o etapas adicionales. DESCRIPCI�N DE LAS FIGURAS A continuaci�n, se presenta una descripci�n breve de cada una de las figuras usadas para completar la descripci�n de la invenci�n que sigue. Dichas figuras se relacionan con realizaciones de la invenci�n, que se presentan como ejemplos no limitativos de la misma. La FIG.1 muestra una vista general de un aparato de masaje de acuerdo con la invenci�n. La FIG.2 comprende una vista en secci�n del man�pulo mostrado en la figura anterior, para una mejor comprensi�n de su funcionamiento. La FIG. 3 es un diagrama de bloques de la invenci�n. La FIG. 4 ilustra una gr�fica que sirve para relacionar variables Referencias num�ricas utilizadas en las figuras 1 Brazo de masaje 2 Cabezales m�viles 3 Cable conductor 4 Motorreductor 5 Aislante el�ctrico 6 Elemento est�tico del conjunto de transmisi�n (corona) 7a Rodamiento del elemento din�mico del conjunto de transmisi�n 7b Pieza de acople del elemento din�mico del conjunto de transmisi�n 8 Sensor de temperatura 9 Im�n de fijaci�n 10 Man�pulo 11 Fuente de alimentaci�n 12 Unidad generadora de radiaci�n electromagn�tica 13 Unidad de proceso 14 Sensor de par de torsi�n 15 Sensor de fuerza vertical 16 Interfaz 17 Indicador 18 Panel de mando DESCRIPCI�N DETALLADA DE LA INVENCI�N Se procede a continuaci�n a describir distintos aspectos de un ejemplo de realizaci�n de la presente invenci�n, con fines meramente ilustrativos y no limitativos. La FIG. 1 muestra una vista general de un aparato de masaje, que incluye una fuente de alimentaci�n 11, que comprende una unidad generadora de ondas electromagn�ticas 12, un man�pulo 10, que est� conectado a la fuente de alimentaci�n 11. Este man�pulo 10, sirve de apoyo para que el terapeuta pueda realizar un masaje sobre un paciente. El man�pulo 10 comprende a su vez diversos elementos que contribuyen al fin de la invenci�n. En esta figura general, se observa un brazo de masaje 1 con una serie de cabezales 2 aplicadores de masaje. Estos cabezales 2 est�n destinados a presionar el cuerpo del paciente, para lo cual comprenden una superficie esf�rica, de modo que se favorezca el contacto. Adem�s de presionar, por los cabezales 2 reciben energ�a en ondas de radiaci�n electromagn�tica que es emitida directamente sobre el cuerpo del paciente. El hecho de que dicha radiaci�n electromagn�tica sea emitida directamente por los cabezales 2 m�viles, en lugar de por un soporte est�tico tiene un efecto muy ventajoso sobre el tratamiento, logrando una sinergia terap�utica que potencia los resultados de cada efecto por separado. Por un lado, se potencia la activaci�n mec�nica de distintas c�lulas y tejidos y por otro se mejora el flujo perif�rico y linf�tico debido a la aplicaci�n de calor exactamente en la regi�n en la que se est� produciendo la activaci�n mec�nica. Al mismo tiempo, el efecto el�ctrico del paso de ondas electromagn�ticas por la piel produce una estimulaci�n bioqu�mica que favorece la eliminaci�n de las grasas e inhibe su acumulaci�n. Adem�s, estimula las c�lulas productoras de fibras el�sticas. En realizaciones particulares, la fuente de ondas electromagn�ticas se modula con una se�al moduladora de baja frecuencia (10Hz a 40KHz) . Esta modulaci�n puede hacerse mediante el control de ancho de pulso. Fisiol�gicamente, la modulaci�n de la se�al portadora de ondas electromagn�ticas genera un aumento de la permeabilidad de las membranas plasm�ticas celulares. Por un lado, se favorece la correcta difusi�n de sustancias entre los espacios extracelulares y las propias c�lulas; y por otro lado, se mejora la capacidad de intercambio de los capilares linf�ticos. Estos dos efectos facilitan los procesos de captaci�n de nutrientes y ox�geno y los procesos de excreci�n de sustancias de desecho al medio extracelular. Un aumento de la permeabilidad celular en los capilares linf�ticos facilita retirar de manera m�s eficaz los etabolitos excretados al espacio intersticial, reduciendo la inflamaci�n y sus consecuencias. La FIG. 2 comprende una vista en secci�n de una realizaci�n particular del man�pulo 10 mostrado en la figura anterior, para una mejor comprensi�n de su funcionamiento mec�nico y el�ctrico. En primer lugar, se analiza la conexi�n mec�nica que posibilita el giro de los cabezales m�viles 2. El man�pulo 10 comprende un motor, motorreductor el�ctrico 4, que se alimenta el�ctricamente a la m�quina. Este motorreductor el�ctrico 4 tiene un eje de salida cubierto por un aislante el�ctrico 5, que a su vez encaja en un elemento din�mico de transmisi�n. Este elemento din�mico de transmisi�n tiene la misi�n de transmitir el movimiento del motorreductor el�ctrico 4 al brazo de masaje 1, y est� formado por un rodamiento 7a y la pieza de acople al brazo de masaje 7b. Este rodamiento asegura el giro estable del brazo de masaje 1, mediante el apoyo sobre un elemento est�tico 6, que en este caso es una corona fijada a la parte inferior del man�pulo 10. En segundo lugar, se analizar� la conexi�n el�ctrica entre los elementos. La fuente de alimentaci�n 11 proporciona energ�a a un generador de ondas electromagn�ticas 12, capaz de modular convenientemente la portadora, y dicha onda es transmitida a lo largo de un cable conductor 3. Ventajosamente, el generador de ondas electromagn�ticas puede estar alojado en una m�quina separada del man�pulo 10. El cable conductor 3 discurre por la conexi�n entre la fuente de alimentaci�n 11, generador de ondas electromagn�ticas 12 y el man�pulo 10 hasta hacer contacto el�ctrico con un elemento est�tico la corona 6. Por lo tanto, el cable conductor 3 se encuentra libre de movimientos de rotaci�n, ya que ha discurrido por la parte est�tica del elemento actuador hasta hacer contacto con la corona 6. De este modo, se consigue la conexi�n el�ctrica entre el generador de ondas electromagn�ticas12 de la fuente de alimentaci�n 11 y la corona 6 del man�pulo 10. Tanto la corona 6 como el rodamiento 7a y la pieza de acople elementos actuadores de masaje 7b est�n fabricados en material conductor. Adem�s, los cabezales m�viles 2 est�n fabricados tambi�n en material conductor, por lo que se consigue que las ondas electromagn�ticas se transmitan hasta los mismos aplicadores de masaje 2. El brazo de masaje 1 que contiene a los cabezales m�viles 2 se fija a la pieza acople 7b por medio de un im�n 9. El sensor de par de torsi�n 14, mide la resistencia al giro, en una realizaci�n se realiza con un sensor de corriente incorporado en la placa electr�nica de control, que funciona tambi�n como una unidad de proceso 13. Combin�ndolo con el sensor de fuerza vertical 15 se computa, a trav�s de un algoritmo que se describe m�s adelante, para monitorizar de forma continua la profundidad efectiva en un interfaz de usuario para la interacci�n del terapeuta. La unidad de proceso 13, adem�s de aplicar la l�gica de control precisa, permite la interacci�n con el terapeuta a trav�s del interfaz 16, que contiene un panel de mando 18 para recibir la consigna de trabajo y monitorizar los par�metros de la sesi�n. Incluye un indicador 17, que mediante un pitido informa al terapeuta de errores o avisos que requieran su atenci�n durante el tratamiento. Por �ltimo, el man�pulo 10 tambi�n comprende un sensor de temperatura 8, que mide de forma continua la evoluci�n de la temperatura de la zona tratada del paciente, reflej�ndose en el interfaz 16 para ser consultada por el terapeuta. Esta temperatura debe estar comprendida en un rango establecido, generalmente, entre 42 �C y 45 �C para facilitar la correcta movilizaci�n de la grasa. La monitorizaci�n de la temperatura permite al terapeuta controlar que el tratamiento se realiza adecuadamente y con seguridad. Una temperatura superior a 45 �C puede ocasionar quemaduras. Una inferior a 42 �C no genera ning�n efecto sobre la grasa corporal. La FIG. 3 ilustra esquem�ticamente un diagrama de bloques de un aparato de masaje para mostrar las relaciones funcionales entre diferentes elementos. Se muestra un motor o motorreductor 4 que aplica movimiento de giro sobre los cabezales m�viles 2. Un conjunto de sensores que incluye el sensor de temperatura 8, el sensor de fuerza vertical 15 (fuerza vertical que ejerce el terapeuta) y el sensor de parde torsi�n 14. Estos sensores efect�an mediciones para conocer la fuerza vertical y par de torsi�n que imparten los cabezales m�viles 2 en el paciente. Estas mediciones son proporcionadas a la unidad de proceso 13. De otra parte, el generador de radiaci�n electromagn�tica 12 genera radiaci�n electromagn�tica con una frecuencia y con una intensidad seleccionadas previamente por el terapeuta seg�n el tipo de masaje, por ejemplo, con la interfaz 16. Las caracter�sticas de la radiaci�n generada se proporcionan a la unidad de proceso 13. Esta adiaci�n llega al paciente a trav�s de los cabezales m�viles 2. La unidad de proceso 13 analiza la informaci�n y establece si el masaje se est� aplicando adecuadamente al paciente. Para este fin, la unidad de proceso 13 calcula el mencionado par�metro denominado profundidad efectiva que informa de la profundidad del tratamiento. Este par�metro tiene un valor que es funci�n principalmente de la fuerza vertical aplicada, del par de torsi�n y de lacantidad de grasa. Tambi�n depende secundariamente de otras caracter�sticas del paciente, tales como hidrataci�n y firmeza de la piel. La unidad de proceso 13 se programa para controlar si la fuerza vertical que aplica el terapeuta es suficiente para llegar a la capa grasa del paciente. Una profundidad menor hace que no se alcance efectivamente la zona objeto donde est� la grasa, con lo que la grasa se lic�a con la radiaci�n electromagn�tica pero no se moviliza convenientemente. Una profundidad mayor hace que llegue a la zona muscular lo que no es adecuado, es doloroso e incluso peligroso. Dados los factores de los que dependen, la profundidad efectiva var�a mucho entre pacientes, por lo que la simple medida de fuerza vertical aplicada no es suficiente para determinar si se llega a la zona objeto. Por esto, para estimar esta profundidad efectiva, en una de las realizaciones se implementa un algoritmo desarrollado que relaciona diferentes variables tomando de forma emp�rica los valores. Para obtener la relaci�n entre los dos par�metros medidos, un terapeuta experimentado aplica el equipo a un paciente y determina cu�ndo est� en un rango de profundidad efectiva adecuada y con qu� medidas de fuerza vertical y resistencia al giro, obteniendo la siguiente tabla (columna: fuerza vertical, filas: par de torsi�n, resultado: profundidad efectiva en mm) : Esta tabla se puede complementar con m�s consideraciones, por ejemplo, caracter�sticas del paciente como edad, sexo, etc. para conseguir mayor selectividad. Mediante la determinaci�n de la profundidad efectiva, se evita incorporar un plic�metro para medir la grasa corporal, reduciendo la posibilidad de error en el proceso, al ser autom�ticamente generado por el sistema sin depender del terapeuta. La FIG. 4 ilustra una gr�fica que sirve para relacionarlas variables fuerza vertical, par de torsi�n y profundidad efectiva, correspondiente con los valores de la tabla. Observar que los valores de torsi�n y fuerza vertical son adimensionales, pues corresponden son porcentajes sobre el valor directo del sensor implementado en el equipo a partir del cual se tom� la tabla de forma emp�rica. Habitualmente, las realizaciones de la invenci�n permiten seleccionar la radiaci�n que va a ser aplicada en funci�n del tipo de paciente y/o tratamiento. Se monitoriza, durante la aplicaci�n del masaje, que el par de torsi�n sea el adecuado. En caso contrario, en algunas realizaciones se emite una se�al de aviso al terapeuta. Adicionalmente, se pueden definir tipos de pacientes seg�n su masa corporal: grueso, normal, delgado. Adicionalmente, se pueden definir zonas corporales donde se va a efectuar el tratamiento. Ciertas zonas tienen una mayor o menor tendencia a acumular grasa. Los anteriores son ejemplos para personalizar de una forma sencilla el tratamiento. En otras realizaciones, se puede implementar la relaci�n emp�rica anterior mediante f�rmulas equivalentes que asocien valores de fuerza vertical y par de torsi�n con la profundidad. En las realizaciones comentadas, el terapeuta es el que decide aplicar m�s o menos fuerza asistido por el aparato de masaje. En otras realizaciones se puede regular la fuerza de giro para controlar el par y as� mantener la profundidad efectiva del tratamiento independiente de la fuerza aplicada por el terapeuta, aunque en un rango de trabajo razonable, dando un aviso si no est� fuera del rango adecuado. En otras realizaciones m�s automatizadas se puede implementar un control de la fuerza vertical, aunque complicar�a el sistema mec�nico.
Publicaciones:
ES2798315 (10/12/2020) - A1 Solicitud de patente con informe sobre el estado de la técnica
ES2798315 (18/05/2021) - B2 Patente de invención con examen
Eventos:
En fecha 27/04/2020 se realizó Registro Instancia de Solicitud
En fecha 27/04/2020 se realizó Admisión a Trámite
En fecha 27/04/2020 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 29/04/2020 se realizó Superado examen de oficio
En fecha 24/11/2020 se realizó Realizado IET
En fecha 25/11/2020 se realizó 1109P_Comunicación Traslado del IET
En fecha 30/11/2020 se realizó 3103P_Registro Solicitud Publicación Anticipada
En fecha 30/11/2020 se realizó PETEX_Petición de examen sustantivo
En fecha 30/11/2020 se realizó Concesión Publicación anticipada
En fecha 03/12/2020 se realizó 5215P_Observaciones del solicitante al IET, Opinión Escrita y/o alegaciones a observaciones de terceros
En fecha 04/12/2020 se realizó Publicación Concesión Publicación Anticipada
En fecha 10/12/2020 se realizó Publicación Solicitud
En fecha 10/12/2020 se realizó Publicación Folleto Solicitud con IET (A1)
En fecha 25/03/2021 se realizó Validación petición y/o pago de examen sustantivo conforme
En fecha 04/05/2021 se realizó No existen objeciones a la concesión de la solicitud
En fecha 04/05/2021 se realizó Finalización de Examen Sustantivo
En fecha 04/05/2021 se realizó 6121P_Comunicación finalización de examen sustantivo
En fecha 10/05/2021 se realizó Publicación finalización de examen sustantivo
En fecha 11/05/2021 se realizó Concesión con examen sustantivo
En fecha 11/05/2021 se realizó Entrega título
En fecha 11/05/2021 se realizó 6125P_Notificación de concesión con examen sustantivo
En fecha 18/05/2021 se realizó Publicación concesión Patente
En fecha 18/05/2021 se realizó Publicación Folleto Concesión
En fecha 18/11/2021 se realizó Plazo expirado presentación de oposiciones contra la concesión de la Patente
Pagos:
27/04/2020 - Pago Tasas IET
05/05/2022 - Pago 03 Anualidad
06/07/2023 - Pago 04 Anualidad
+ ES-2798315_B21 Aparato de masaje corporal que comprende: un man�pulo (10) que comprende una pluralidad de cabezales m�viles (2) para aplicar fuerza sobre el cuerpo de un paciente y un brazo de masaje (1) conectado con los cabezales m�viles (2) ; un motor (4) acoplado mec�nicamente con la pluralidad de cabezales m�viles (2) para impartirles movimiento; caracterizado por que el aparato comprende adem�s: unos medios de medici�n que comprenden un sensor de fuerza vertical (15) configurado para medir la fuerza aplicada perpendicularmente sobre el cuerpo del paciente, y un sensor de par de torsi�n (14) configurado para medir la resistencia al giro de los cabezales m�viles (2) sobre el cuerpo del paciente; un generador de radiaci�n electromagn�tica (12) configurado para generar radiaci�n electromagn�tica con una frecuencia y con una intensidad fijadas, donde los cabezales m�viles (2) est�n conectados el�ctricamente con el generador de radiaci�n electromagn�tica (12) para recibir la radiaci�n electromagn�tica y aplicarla sobre el cuerpo del paciente; una unidad de proceso (13) configurada para recibir informaci�n de los medios de medici�n y estimar la profundidad efectiva del tratamiento en el cuerpo del paciente; donde la unidad de proceso (13) est� configurada para determinar en tiempo real, si, para la profundidad efectiva, la fuerza vertical aplicada es adecuada. 2.- Aparato de masaje seg�n la reivindicaci�n 1, donde los medios de medici�n comprenden adem�s un sensor de temperatura (8) , de forma que la unidad de proceso (13) determina si la temperatura es adecuada cuando est� dentro de un rango prefijado. 3.- Aparato de masaje seg�n la reivindicaci�n 1 o 2, que comprende adem�s un indicador (17) para avisar si la fuerza vertical, la torsi�n y/o la temperatura es adecuada. 4.- Aparato de masaje seg�n la reivindicaci�n 3, donde la unidad de proceso (13) est� configurada para actuar sobre el motor (4) si la fuerza vertical o la torsi�n no es adecuada. 5.- Aparato de masaje seg�n una cualquiera de las reivindicaciones anteriores 2 a 4, donde la unidad de proceso (13) est� configurada para actuar sobre el generador de radiaci�n electromagn�tica (12) si temperatura no es adecuada. 6.- Aparato de masaje seg�n una cualquiera de las reivindicaciones anteriores, que comprende adem�s una interfaz (16) para fijar valores al menos para el par de torsi�n, frecuencia y la intensidad de la radiaci�n electromagn�tica. 7.- Aparato de masaje seg�n una cualquiera de las reivindicaciones anteriores, donde la radiaci�n electromagn�tica generada es una onda modulada a una frecuencia de valor comprendido entre 10 Hz y 40 KHz. 8.- Aparato de masaje seg�n la reivindicaci�n 7, donde la modulaci�n es por ancho de pulso. 9.- Aparato de masaje seg�n una cualquiera de las reivindicaciones anteriores, en el que los cabezales (2) tienen forma esf�rica. 10.- Aparato de masaje seg�n una cualquiera de las reivindicaciones anteriores, que comprende adem�s una fuente de alimentaci�n (12) configurada para suministrar energ�a a los medios de generaci�n de radiaci�n electromagn�tica (12) y al motor (4) . 11.- Aparato de masaje seg�n la reivindicaci�n 10, donde la fuente de alimentaci�n (12) est� alojada junto con separadamente del man�pulo (10) . 12.- Aparato de masaje seg�n una cualquiera de las reivindicaciones anteriores, donde para estimar la profundidad efectiva del tratamiento, la unidad de proceso (13) comprende un registro que almacena al menos valores de fuerza vertical, par de torsi�n y los relaciona con un valor de profundidad efectiva para el paciente.
+ ES-2798315_A11 Aparato de masaje corporal que comprende: un man�pulo (10) que comprende una pluralidad de cabezales m�viles (2) para aplicar fuerza sobre el cuerpo de un paciente y un brazo de masaje (1) conectado con los cabezales m�viles (2) ; un motor (4) acoplado mec�nicamente con la pluralidad de cabezales m�viles (2) para impartirles movimiento; caracterizado por que el aparato comprende adem�s: unos medios de medici�n que comprenden un sensor de fuerza vertical (15) configurado para medir la fuerza aplicada perpendicularmente sobre el cuerpo del paciente, y un sensor de par de torsi�n (14) configurado para medir la resistencia al giro de los cabezales m�viles (2) sobre el cuerpo del paciente; un generador de radiaci�n electromagn�tica (12) configurado para generar radiaci�n electromagn�tica con una frecuencia y con una intensidad fijadas, donde los cabezales m�viles (2) est�n conectados el�ctricamente con el generador de radiaci�n electromagn�tica (12) para recibir la radiaci�n electromagn�tica y aplicarla sobre el cuerpo del paciente; una unidad de proceso (13) configurada para recibir informaci�n de los medios de medici�n y estimar la profundidad efectiva del tratamiento en el cuerpo del paciente; donde la unidad de proceso (13) est� configurada para determinar en tiempo real, si, para la profundidad efectiva, la fuerza vertical aplicada es adecuada. 2.- Aparato de masaje seg�n la reivindicaci�n 1, donde los medios de medici�n comprenden adem�s un sensor de temperatura (8) , de forma que la unidad de proceso (13) determina si la temperatura es adecuada cuando est� dentro de un rango prefijado. 3.- Aparato de masaje seg�n la reivindicaci�n 1 o 2, que comprende adem�s un indicador (17) para avisar si la fuerza vertical, la torsi�n y/o la temperatura es adecuada. 4.- Aparato de masaje seg�n la reivindicaci�n 3, donde la unidad de proceso (13) est� configurada para actuar sobre el motor (4) si la fuerza vertical o la torsi�n no es adecuada. 5.- Aparato de masaje seg�n una cualquiera de las reivindicaciones anteriores 2 a 4, donde la unidad de proceso (13) est� configurada para actuar sobre el generador de radiaci�n electromagn�tica (12) si temperatura no es adecuada. 6.- Aparato de masaje seg�n una cualquiera de las reivindicaciones anteriores, que comprende adem�s una interfaz (16) para fijar valores al menos para el par de torsi�n, frecuencia y la intensidad de la radiaci�n electromagn�tica. 7.- Aparato de masaje seg�n una cualquiera de las reivindicaciones anteriores, donde la radiaci�n electromagn�tica generada es una onda modulada a una frecuencia de valor comprendido entre 10 Hz y 40 KHz. 8.- Aparato de masaje seg�n la reivindicaci�n 7, donde la modulaci�n es por ancho de pulso. 9.- Aparato de masaje seg�n una cualquiera de las reivindicaciones anteriores, en el que los cabezales (2) tienen forma esf�rica. 10.- Aparato de masaje seg�n una cualquiera de las reivindicaciones anteriores, que comprende adem�s una fuente de alimentaci�n (12) configurada para suministrar energ�a a los medios de generaci�n de radiaci�n electromagn�tica (12) y al motor (4) . 11.- Aparato de masaje seg�n la reivindicaci�n 10, donde la fuente de alimentaci�n (12) est� alojada junto con separadamente del man�pulo (10) . 12.- Aparato de masaje seg�n una cualquiera de las reivindicaciones anteriores, donde para estimar la profundidad efectiva del tratamiento, la unidad de proceso (13) comprende un registro que almacena al menos valores de fuerza vertical, par de torsi�n y los relaciona con un valor de profundidad efectiva para el paciente.
Los productos y servicios protegidos por este registro son:
A61H 15/00 - A61H 15/02
Descripciones:
+ ES-2798315_B2 APARATO DE MASAJE CORPORAL CAMPO DE LA INVENCI�N La presente invenci�n se enmarca dentro de los aparatos que se utilizan para dar masajes a los pacientes, especialmente aquellos que disponen de una fuente adicional de energ�a para mejorar el efecto de dichos masajes, e incorporando la monitorizaci�n de la profundidad efectiva del tratamiento. ANTECEDENTES DE LA INVENCI�N Existen numerosos aparatos de masajes, que proporcionan al usuario la capacidad de aplicar un masaje de manera homog�nea y sin provocar cansancio en el terapeuta. Algunos aparatos de masaje que emplean escobillas, engranajes, cadenas de transmisi�n generan un rozamiento excesivo que afecta negativamente en la eficacia del masaje. Otros aparatos comprenden un man�pulo, es decir un soporte para usar con la mano del terapeuta que dispone de una serie de elementos esf�ricos (tambi�n llamados cabezales) que presionan el cuerpo del paciente cuando se realiza el masaje. Este man�pulo termina en un brazo de masaje que comprende los elementos esf�ricos, que pueden rotar mientras se desplazan por el cuerpo del paciente, mejorando el efecto del masaje. En ocasiones, existen sensores para la fuerza vertical aplicada. Recientemente, han aparecido aparatos de masaje que utilizan una fuente de calor para acompa�arlos movimientos del masaje. Esta fuente de calor suele ser en forma de radiaci�n infrarroja o corrientes por efecto Joule. Debido a este calor, se mejora el efecto del masaje, ya que se consigue una mejor preparaci�n del tejido conectivo. DESCRIPCI�N BREVE DE LA INVENCI�N A pesar de los avances mencionados, hay lugar para la mejora en los aparatos existentes. Los aparatos existentes omiten par�metros importantes para el tratamiento incluso aquellos que combinan masaje rotativo y radiaci�n electromagn�tica. Los cabezales m�viles aplican un masaje rotativo con mucho menor esfuerzo del terapeuta, incluso manteniendo est�tico el man�pulo del aparato de masaje. La presente invenci�n aplica masaje rotativo y hace uso del par�metro profundidad efectiva, que se entiende como la distancia a la que es conveniente llegar con el masaje. Determinar la profundidad efectiva no es trivial. Aunque existen soluciones capaces de detectar la fuerza vertical aplicada en un tratamiento, esta informaci�n por s� sola no permite identificarla profundidad efectiva. Seg�n las caracter�sticas del paciente (por ejemplo, grueso o delgado) y tambi�n de la zona concreta del cuerpo, la profundidad efectiva var�a. La capa de grasa que hay bajo la piel es el principal factor en la profundidad efectiva, aunque no el �nico. Se ha encontrado que la profundidad efectiva est� condicionada adem�s por factores como la elasticidad de la piel, hidrataci�n o rozamiento del cabezal sobre la zona a aplicar. En suma, el terapeuta seg�n su experiencia subjetiva debe juzgar si el masaje se realiza a profundidad y/o presi�n apropiadas. Para atender a las limitaciones identificadas, se plantea la presente invenci�n que propone un aparato de masaje corporal que monitoriza la efectividad del tratamiento mediante las caracter�sticas t�cnicas de la reivindicaci�n principal. El aparato de masaje dispone de un man�pulo que comprende una pluralidad de cabezales m�viles para aplicar fuerza sobre el cuerpo de un paciente y un brazo de masaje conectado con los cabezales m�viles. Incluye un motor acoplado mec�nicamente con los cabezales m�viles para impartirles movimiento. Incluye unos medios de medici�n que comprenden un sensor de fuerza vertical para medir la fuerza aplicada perpendicularmente sobre el cuerpo del paciente, y un sensor de par de torsi�n para medir la resistencia al giro de los cabezales m�viles sobre el cuerpo del paciente. Opcionalmente, puede incorporar un term�metro para tomar la temperatura de la zona del cuerpo del paciente donde se aplican los cabezales. Incluye un generador de radiaci�n electromagn�tica para generar radiaci�n electromagn�tica con una frecuencia y con una intensidad fijadas, y aplicarla sobre el cuerpo del paciente a trav�s de los cabezales m�viles. Incluye una unidad de proceso que, con la informaci�n de los medios de medici�n, estima la profundidad efectiva del tratamiento en el cuerpo del paciente. La unidad de proceso determina en tiempo real, si, para la profundidad efectiva estimada, la fuerza aplicada es adecuada. A menos que se defina de otra manera, todos los t�rminos (tanto los cient�ficos como los t�cnicos) que se usan en este documento han de ser interpretados como lo har�a un experto en la materia. Se entender�, por tanto, que los t�rminos de uso com�n deben ser interpretados de la manera que lo har�a un conocedor de la materia, y no de un modo idealizado o estrictamente formal. A lo largo del texto, la palabra "comprende" (y sus derivados, como "comprendiendo") no deben ser entendidos de un modo excluyente, sino que deben ser entendidos en el sentido en que admiten la posibilidad de que lo definido pueda incluir elementos o etapas adicionales. DESCRIPCI�N DE LAS FIGURAS A continuaci�n, se presenta una descripci�n breve de cada una de las figuras usadas para completar la descripci�n de la invenci�n que sigue. Dichas figuras se relacionan con realizaciones de la invenci�n, que se presentan como ejemplos no limitativos de la misma. La FIG.1 muestra una vista general de un aparato de masaje de acuerdo con la invenci�n. La FIG.2 comprende una vista en secci�n del man�pulo mostrado en la figura anterior, para una mejor comprensi�n de su funcionamiento. La FIG. 3 es un diagrama de bloques de la invenci�n. La FIG. 4 ilustra una gr�fica que sirve para relacionar variables Referencias num�ricas utilizadas en las figuras 1 Brazo de masaje 2 Cabezales m�viles 3 Cable conductor 4 Motorreductor 5 Aislante el�ctrico 6 Elemento est�tico del conjunto de transmisi�n (corona) 7a Rodamiento del elemento din�mico del conjunto de transmisi�n 7b Pieza de acople del elemento din�mico del conjunto de transmisi�n 8 Sensor de temperatura 9 Im�n de fijaci�n 10 Man�pulo 11 Fuente de alimentaci�n 12 Unidad generadora de radiaci�n electromagn�tica 13 Unidad de proceso 14 Sensor de par de torsi�n 15 Sensor de fuerza vertical 16 Interfaz 17 Indicador 18 Panel de mando DESCRIPCI�N DETALLADA DE LA INVENCI�N Se procede a continuaci�n a describir distintos aspectos de un ejemplo de realizaci�n de la presente invenci�n, con fines meramente ilustrativos y no limitativos. La FIG. 1 muestra una vista general de un aparato de masaje, que incluye una fuente de alimentaci�n 11, que comprende una unidad generadora de ondas electromagn�ticas 12, un man�pulo 10, que est� conectado a la fuente de alimentaci�n 11. Este man�pulo 10, sirve de apoyo para que el terapeuta pueda realizar un masaje sobre un paciente. El man�pulo 10 comprende a su vez diversos elementos que contribuyen al fin de la invenci�n. En esta figura general, se observa un brazo de masaje 1 con una serie de cabezales 2 aplicadores de masaje. Estos cabezales 2 est�n destinados a presionar el cuerpo del paciente, para lo cual comprenden una superficie esf�rica, de modo que se favorezca el contacto. Adem�s de presionar, por los cabezales 2 reciben energ�a en ondas de radiaci�n electromagn�tica que es emitida directamente sobre el cuerpo del paciente. El hecho de que dicha radiaci�n electromagn�tica sea emitida directamente por los cabezales 2 m�viles, en lugar de por un soporte est�tico tiene un efecto muy ventajoso sobre el tratamiento, logrando una sinergia terap�utica que potencia los resultados de cada efecto por separado. Por un lado, se potencia la activaci�n mec�nica de distintas c�lulas y tejidos y por otro se mejora el flujo perif�rico y linf�tico debido a la aplicaci�n de calor exactamente en la regi�n en la que se est� produciendo la activaci�n mec�nica. Al mismo tiempo, el efecto el�ctrico del paso de ondas electromagn�ticas por la piel produce una estimulaci�n bioqu�mica que favorece la eliminaci�n de las grasas e inhibe su acumulaci�n. Adem�s, estimula las c�lulas productoras de fibras el�sticas. En realizaciones particulares, la fuente de ondas electromagn�ticas se modula con una se�al moduladora de baja frecuencia (10Hz a 40KHz) . Esta modulaci�n puede hacerse mediante el control de ancho de pulso. Fisiol�gicamente, la modulaci�n de la se�al portadora de ondas electromagn�ticas genera un aumento de la permeabilidad de las membranas plasm�ticas celulares. Por un lado, se favorece la correcta difusi�n de sustancias entre los espacios extracelulares y las propias c�lulas; y por otro lado, se mejora la capacidad de intercambio de los capilares linf�ticos. Estos dos efectos facilitan los procesos de captaci�n de nutrientes y ox�geno y los procesos de excreci�n de sustancias de desecho al medio extracelular. Un aumento de la permeabilidad celular en los capilares linf�ticos facilita retirar de manera m�s eficaz los etabolitos excretados al espacio intersticial, reduciendo la inflamaci�n y sus consecuencias. La FIG. 2 comprende una vista en secci�n de una realizaci�n particular del man�pulo 10 mostrado en la figura anterior, para una mejor comprensi�n de su funcionamiento mec�nico y el�ctrico. En primer lugar, se analiza la conexi�n mec�nica que posibilita el giro de los cabezales m�viles 2. El man�pulo 10 comprende un motor, motorreductor el�ctrico 4, que se alimenta el�ctricamente a la m�quina. Este motorreductor el�ctrico 4 tiene un eje de salida cubierto por un aislante el�ctrico 5, que a su vez encaja en un elemento din�mico de transmisi�n. Este elemento din�mico de transmisi�n tiene la misi�n de transmitir el movimiento del motorreductor el�ctrico 4 al brazo de masaje 1, y est� formado por un rodamiento 7a y la pieza de acople al brazo de masaje 7b. Este rodamiento asegura el giro estable del brazo de masaje 1, mediante el apoyo sobre un elemento est�tico 6, que en este caso es una corona fijada a la parte inferior del man�pulo 10. En segundo lugar, se analizar� la conexi�n el�ctrica entre los elementos. La fuente de alimentaci�n 11 proporciona energ�a a un generador de ondas electromagn�ticas 12, capaz de modular convenientemente la portadora, y dicha onda es transmitida a lo largo de un cable conductor 3. Ventajosamente, el generador de ondas electromagn�ticas puede estar alojado en una m�quina separada del man�pulo 10. El cable conductor 3 discurre por la conexi�n entre la fuente de alimentaci�n 11, generador de ondas electromagn�ticas 12 y el man�pulo 10 hasta hacer contacto el�ctrico con un elemento est�tico la corona 6. Por lo tanto, el cable conductor 3 se encuentra libre de movimientos de rotaci�n, ya que ha discurrido por la parte est�tica del elemento actuador hasta hacer contacto con la corona 6. De este modo, se consigue la conexi�n el�ctrica entre el generador de ondas electromagn�ticas12 de la fuente de alimentaci�n 11 y la corona 6 del man�pulo 10. Tanto la corona 6 como el rodamiento 7a y la pieza de acople elementos actuadores de masaje 7b est�n fabricados en material conductor. Adem�s, los cabezales m�viles 2 est�n fabricados tambi�n en material conductor, por lo que se consigue que las ondas electromagn�ticas se transmitan hasta los mismos aplicadores de masaje 2. El brazo de masaje 1 que contiene a los cabezales m�viles 2 se fija a la pieza acople 7b por medio de un im�n 9. El sensor de par de torsi�n 14, mide la resistencia al giro, en una realizaci�n se realiza con un sensor de corriente incorporado en la placa electr�nica de control, que funciona tambi�n como una unidad de proceso 13. Combin�ndolo con el sensor de fuerza vertical 15 se computa, a trav�s de un algoritmo que se describe m�s adelante, para monitorizar de forma continua la profundidad efectiva en un interfaz de usuario para la interacci�n del terapeuta. La unidad de proceso 13, adem�s de aplicar la l�gica de control precisa, permite la interacci�n con el terapeuta a trav�s del interfaz 16, que contiene un panel de mando 18 para recibir la consigna de trabajo y monitorizar los par�metros de la sesi�n. Incluye un indicador 17, que mediante un pitido informa al terapeuta de errores o avisos que requieran su atenci�n durante el tratamiento. Por �ltimo, el man�pulo 10 tambi�n comprende un sensor de temperatura 8, que mide de forma continua la evoluci�n de la temperatura de la zona tratada del paciente, reflej�ndose en el interfaz 16 para ser consultada por el terapeuta. Esta temperatura debe estar comprendida en un rango establecido, generalmente, entre 42 �C y 45 �C para facilitar la correcta movilizaci�n de la grasa. La monitorizaci�n de la temperatura permite al terapeuta controlar que el tratamiento se realiza adecuadamente y con seguridad. Una temperatura superior a 45 �C puede ocasionar quemaduras. Una inferior a 42 �C no genera ning�n efecto sobre la grasa corporal. La FIG. 3 ilustra esquem�ticamente un diagrama de bloques de un aparato de masaje para mostrar las relaciones funcionales entre diferentes elementos. Se muestra un motor o motorreductor 4 que aplica movimiento de giro sobre los cabezales m�viles 2. Un conjunto de sensores que incluye el sensor de temperatura 8, el sensor de fuerza vertical 15 (fuerza vertical que ejerce el terapeuta) y el sensor de parde torsi�n 14. Estos sensores efect�an mediciones para conocer la fuerza vertical y par de torsi�n que imparten los cabezales m�viles 2 en el paciente. Estas mediciones son proporcionadas a la unidad de proceso 13. De otra parte, el generador de radiaci�n electromagn�tica 12 genera radiaci�n electromagn�tica con una frecuencia y con una intensidad seleccionadas previamente por el terapeuta seg�n el tipo de masaje, por ejemplo, con la interfaz 16. Las caracter�sticas de la radiaci�n generada se proporcionan a la unidad de proceso 13. Esta adiaci�n llega al paciente a trav�s de los cabezales m�viles 2. La unidad de proceso 13 analiza la informaci�n y establece si el masaje se est� aplicando adecuadamente al paciente. Para este fin, la unidad de proceso 13 calcula el mencionado par�metro denominado profundidad efectiva que informa de la profundidad del tratamiento. Este par�metro tiene un valor que es funci�n principalmente de la fuerza vertical aplicada, del par de torsi�n y de lacantidad de grasa. Tambi�n depende secundariamente de otras caracter�sticas del paciente, tales como hidrataci�n y firmeza de la piel. La unidad de proceso 13 se programa para controlar si la fuerza vertical que aplica el terapeuta es suficiente para llegar a la capa grasa del paciente. Una profundidad menor hace que no se alcance efectivamente la zona objeto donde est� la grasa, con lo que la grasa se lic�a con la radiaci�n electromagn�tica pero no se moviliza convenientemente. Una profundidad mayor hace que llegue a la zona muscular lo que no es adecuado, es doloroso e incluso peligroso. Dados los factores de los que dependen, la profundidad efectiva var�a mucho entre pacientes, por lo que la simple medida de fuerza vertical aplicada no es suficiente para determinar si se llega a la zona objeto. Por esto, para estimar esta profundidad efectiva, en una de las realizaciones se implementa un algoritmo desarrollado que relaciona diferentes variables tomando de forma emp�rica los valores. Para obtener la relaci�n entre los dos par�metros medidos, un terapeuta experimentado aplica el equipo a un paciente y determina cu�ndo est� en un rango de profundidad efectiva adecuada y con qu� medidas de fuerza vertical y resistencia al giro, obteniendo la siguiente tabla (columna: fuerza vertical, filas: par de torsi�n, resultado: profundidad efectiva en mm) : Esta tabla se puede complementar con m�s consideraciones, por ejemplo, caracter�sticas del paciente como edad, sexo, etc. para conseguir mayor selectividad. Mediante la determinaci�n de la profundidad efectiva, se evita incorporar un plic�metro para medir la grasa corporal, reduciendo la posibilidad de error en el proceso, al ser autom�ticamente generado por el sistema sin depender del terapeuta. La FIG. 4 ilustra una gr�fica que sirve para relacionarlas variables fuerza vertical, par de torsi�n y profundidad efectiva, correspondiente con los valores de la tabla. Observar que los valores de torsi�n y fuerza vertical son adimensionales, pues corresponden son porcentajes sobre el valor directo del sensor implementado en el equipo a partir del cual se tom� la tabla de forma emp�rica. Habitualmente, las realizaciones de la invenci�n permiten seleccionar la radiaci�n que va a ser aplicada en funci�n del tipo de paciente y/o tratamiento. Se monitoriza, durante la aplicaci�n del masaje, que el par de torsi�n sea el adecuado. En caso contrario, en algunas realizaciones se emite una se�al de aviso al terapeuta. Adicionalmente, se pueden definir tipos de pacientes seg�n su masa corporal: grueso, normal, delgado. Adicionalmente, se pueden definir zonas corporales donde se va a efectuar el tratamiento. Ciertas zonas tienen una mayor o menor tendencia a acumular grasa. Los anteriores son ejemplos para personalizar de una forma sencilla el tratamiento. En otras realizaciones, se puede implementar la relaci�n emp�rica anterior mediante f�rmulas equivalentes que asocien valores de fuerza vertical y par de torsi�n con la profundidad. En las realizaciones comentadas, el terapeuta es el que decide aplicar m�s o menos fuerza asistido por el aparato de masaje. En otras realizaciones se puede regular la fuerza de giro para controlar el par y as� mantener la profundidad efectiva del tratamiento independiente de la fuerza aplicada por el terapeuta, aunque en un rango de trabajo razonable, dando un aviso si no est� fuera del rango adecuado. En otras realizaciones m�s automatizadas se puede implementar un control de la fuerza vertical, aunque complicar�a el sistema mec�nico.
+ ES-2798315_A1 APARATO DE MASAJE CORPORAL CAMPO DE LA INVENCI�N La presente invenci�n se enmarca dentro de los aparatos que se utilizan para dar masajes a los pacientes, especialmente aquellos que disponen de una fuente adicional de energ�a para mejorar el efecto de dichos masajes, e incorporando la monitorizaci�n de la profundidad efectiva del tratamiento. ANTECEDENTES DE LA INVENCI�N Existen numerosos aparatos de masajes, que proporcionan al usuario la capacidad de aplicar un masaje de manera homog�nea y sin provocar cansancio en el terapeuta. Algunos aparatos de masaje que emplean escobillas, engranajes, cadenas de transmisi�n generan un rozamiento excesivo que afecta negativamente en la eficacia del masaje. Otros aparatos comprenden un man�pulo, es decir un soporte para usar con la mano del terapeuta que dispone de una serie de elementos esf�ricos (tambi�n llamados cabezales) que presionan el cuerpo del paciente cuando se realiza el masaje. Este man�pulo termina en un brazo de masaje que comprende los elementos esf�ricos, que pueden rotar mientras se desplazan por el cuerpo del paciente, mejorando el efecto del masaje. En ocasiones, existen sensores para la fuerza vertical aplicada. Recientemente, han aparecido aparatos de masaje que utilizan una fuente de calor para acompa�arlos movimientos del masaje. Esta fuente de calor suele ser en forma de radiaci�n infrarroja o corrientes por efecto Joule. Debido a este calor, se mejora el efecto del masaje, ya que se consigue una mejor preparaci�n del tejido conectivo. DESCRIPCI�N BREVE DE LA INVENCI�N A pesar de los avances mencionados, hay lugar para la mejora en los aparatos existentes. Los aparatos existentes omiten par�metros importantes para el tratamiento incluso aquellos que combinan masaje rotativo y radiaci�n electromagn�tica. Los cabezales m�viles aplican un masaje rotativo con mucho menor esfuerzo del terapeuta, incluso manteniendo est�tico el man�pulo del aparato de masaje. La presente invenci�n aplica masaje rotativo y hace uso del par�metro profundidad efectiva, que se entiende como la distancia a la que es conveniente llegar con el masaje. Determinar la profundidad efectiva no es trivial. Aunque existen soluciones capaces de detectar la fuerza vertical aplicada en un tratamiento, esta informaci�n por s� sola no permite identificarla profundidad efectiva. Seg�n las caracter�sticas del paciente (por ejemplo, grueso o delgado) y tambi�n de la zona concreta del cuerpo, la profundidad efectiva var�a. La capa de grasa que hay bajo la piel es el principal factor en la profundidad efectiva, aunque no el �nico. Se ha encontrado que la profundidad efectiva est� condicionada adem�s por factores como la elasticidad de la piel, hidrataci�n o rozamiento del cabezal sobre la zona a aplicar. En suma, el terapeuta seg�n su experiencia subjetiva debe juzgar si el masaje se realiza a profundidad y/o presi�n apropiadas. Para atender a las limitaciones identificadas, se plantea la presente invenci�n que propone un aparato de masaje corporal que monitoriza la efectividad del tratamiento mediante las caracter�sticas t�cnicas de la reivindicaci�n principal. El aparato de masaje dispone de un man�pulo que comprende una pluralidad de cabezales m�viles para aplicar fuerza sobre el cuerpo de un paciente y un brazo de masaje conectado con los cabezales m�viles. Incluye un motor acoplado mec�nicamente con los cabezales m�viles para impartirles movimiento. Incluye unos medios de medici�n que comprenden un sensor de fuerza vertical para medir la fuerza aplicada perpendicularmente sobre el cuerpo del paciente, y un sensor de par de torsi�n para medir la resistencia al giro de los cabezales m�viles sobre el cuerpo del paciente. Opcionalmente, puede incorporar un term�metro para tomar la temperatura de la zona del cuerpo del paciente donde se aplican los cabezales. Incluye un generador de radiaci�n electromagn�tica para generar radiaci�n electromagn�tica con una frecuencia y con una intensidad fijadas, y aplicarla sobre el cuerpo del paciente a trav�s de los cabezales m�viles. Incluye una unidad de proceso que, con la informaci�n de los medios de medici�n, estima la profundidad efectiva del tratamiento en el cuerpo del paciente. La unidad de proceso determina en tiempo real, si, para la profundidad efectiva estimada, la fuerza aplicada es adecuada. A menos que se defina de otra manera, todos los t�rminos (tanto los cient�ficos como los t�cnicos) que se usan en este documento han de ser interpretados como lo har�a un experto en la materia. Se entender�, por tanto, que los t�rminos de uso com�n deben ser interpretados de la manera que lo har�a un conocedor de la materia, y no de un modo idealizado o estrictamente formal. A lo largo del texto, la palabra "comprende" (y sus derivados, como "comprendiendo") no deben ser entendidos de un modo excluyente, sino que deben ser entendidos en el sentido en que admiten la posibilidad de que lo definido pueda incluir elementos o etapas adicionales. DESCRIPCI�N DE LAS FIGURAS A continuaci�n, se presenta una descripci�n breve de cada una de las figuras usadas para completar la descripci�n de la invenci�n que sigue. Dichas figuras se relacionan con realizaciones de la invenci�n, que se presentan como ejemplos no limitativos de la misma. La FIG.1 muestra una vista general de un aparato de masaje de acuerdo con la invenci�n. La FIG.2 comprende una vista en secci�n del man�pulo mostrado en la figura anterior, para una mejor comprensi�n de su funcionamiento. La FIG. 3 es un diagrama de bloques de la invenci�n. La FIG. 4 ilustra una gr�fica que sirve para relacionar variables Referencias num�ricas utilizadas en las figuras 1 Brazo de masaje 2 Cabezales m�viles 3 Cable conductor 4 Motorreductor 5 Aislante el�ctrico 6 Elemento est�tico del conjunto de transmisi�n (corona) 7a Rodamiento del elemento din�mico del conjunto de transmisi�n 7b Pieza de acople del elemento din�mico del conjunto de transmisi�n 8 Sensor de temperatura 9 Im�n de fijaci�n 10 Man�pulo 11 Fuente de alimentaci�n 12 Unidad generadora de radiaci�n electromagn�tica 13 Unidad de proceso 14 Sensor de par de torsi�n 15 Sensor de fuerza vertical 16 Interfaz 17 Indicador 18 Panel de mando DESCRIPCI�N DETALLADA DE LA INVENCI�N Se procede a continuaci�n a describir distintos aspectos de un ejemplo de realizaci�n de la presente invenci�n, con fines meramente ilustrativos y no limitativos. La FIG. 1 muestra una vista general de un aparato de masaje, que incluye una fuente de alimentaci�n 11, que comprende una unidad generadora de ondas electromagn�ticas 12, un man�pulo 10, que est� conectado a la fuente de alimentaci�n 11. Este man�pulo 10, sirve de apoyo para que el terapeuta pueda realizar un masaje sobre un paciente. El man�pulo 10 comprende a su vez diversos elementos que contribuyen al fin de la invenci�n. En esta figura general, se observa un brazo de masaje 1 con una serie de cabezales 2 aplicadores de masaje. Estos cabezales 2 est�n destinados a presionar el cuerpo del paciente, para lo cual comprenden una superficie esf�rica, de modo que se favorezca el contacto. Adem�s de presionar, por los cabezales 2 reciben energ�a en ondas de radiaci�n electromagn�tica que es emitida directamente sobre el cuerpo del paciente. El hecho de que dicha radiaci�n electromagn�tica sea emitida directamente por los cabezales 2 m�viles, en lugar de por un soporte est�tico tiene un efecto muy ventajoso sobre el tratamiento, logrando una sinergia terap�utica que potencia los resultados de cada efecto por separado. Por un lado, se potencia la activaci�n mec�nica de distintas c�lulas y tejidos y por otro se mejora el flujo perif�rico y linf�tico debido a la aplicaci�n de calor exactamente en la regi�n en la que se est� produciendo la activaci�n mec�nica. Al mismo tiempo, el efecto el�ctrico del paso de ondas electromagn�ticas por la piel produce una estimulaci�n bioqu�mica que favorece la eliminaci�n de las grasas e inhibe su acumulaci�n. Adem�s, estimula las c�lulas productoras de fibras el�sticas. En realizaciones particulares, la fuente de ondas electromagn�ticas se modula con una se�al moduladora de baja frecuencia (10Hz a 40KHz) . Esta modulaci�n puede hacerse mediante el control de ancho de pulso. Fisiol�gicamente, la modulaci�n de la se�al portadora de ondas electromagn�ticas genera un aumento de la permeabilidad de las membranas plasm�ticas celulares. Por un lado, se favorece la correcta difusi�n de sustancias entre los espacios extracelulares y las propias c�lulas; y por otro lado, se mejora la capacidad de intercambio de los capilares linf�ticos. Estos dos efectos facilitan los procesos de captaci�n de nutrientes y ox�geno y los procesos de excreci�n de sustancias de desecho al medio extracelular. Un aumento de la permeabilidad celular en los capilares linf�ticos facilita retirar de manera m�s eficaz los etabolitos excretados al espacio intersticial, reduciendo la inflamaci�n y sus consecuencias. La FIG. 2 comprende una vista en secci�n de una realizaci�n particular del man�pulo 10 mostrado en la figura anterior, para una mejor comprensi�n de su funcionamiento mec�nico y el�ctrico. En primer lugar, se analiza la conexi�n mec�nica que posibilita el giro de los cabezales m�viles 2. El man�pulo 10 comprende un motor, motorreductor el�ctrico 4, que se alimenta el�ctricamente a la m�quina. Este motorreductor el�ctrico 4 tiene un eje de salida cubierto por un aislante el�ctrico 5, que a su vez encaja en un elemento din�mico de transmisi�n. Este elemento din�mico de transmisi�n tiene la misi�n de transmitir el movimiento del motorreductor el�ctrico 4 al brazo de masaje 1, y est� formado por un rodamiento 7a y la pieza de acople al brazo de masaje 7b. Este rodamiento asegura el giro estable del brazo de masaje 1, mediante el apoyo sobre un elemento est�tico 6, que en este caso es una corona fijada a la parte inferior del man�pulo 10. En segundo lugar, se analizar� la conexi�n el�ctrica entre los elementos. La fuente de alimentaci�n 11 proporciona energ�a a un generador de ondas electromagn�ticas 12, capaz de modular convenientemente la portadora, y dicha onda es transmitida a lo largo de un cable conductor 3. Ventajosamente, el generador de ondas electromagn�ticas puede estar alojado en una m�quina separada del man�pulo 10. El cable conductor 3 discurre por la conexi�n entre la fuente de alimentaci�n 11, generador de ondas electromagn�ticas 12 y el man�pulo 10 hasta hacer contacto el�ctrico con un elemento est�tico la corona 6. Por lo tanto, el cable conductor 3 se encuentra libre de movimientos de rotaci�n, ya que ha discurrido por la parte est�tica del elemento actuador hasta hacer contacto con la corona 6. De este modo, se consigue la conexi�n el�ctrica entre el generador de ondas electromagn�ticas12 de la fuente de alimentaci�n 11 y la corona 6 del man�pulo 10. Tanto la corona 6 como el rodamiento 7a y la pieza de acople elementos actuadores de masaje 7b est�n fabricados en material conductor. Adem�s, los cabezales m�viles 2 est�n fabricados tambi�n en material conductor, por lo que se consigue que las ondas electromagn�ticas se transmitan hasta los mismos aplicadores de masaje 2. El brazo de masaje 1 que contiene a los cabezales m�viles 2 se fija a la pieza acople 7b por medio de un im�n 9. El sensor de par de torsi�n 14, mide la resistencia al giro, en una realizaci�n se realiza con un sensor de corriente incorporado en la placa electr�nica de control, que funciona tambi�n como una unidad de proceso 13. Combin�ndolo con el sensor de fuerza vertical 15 se computa, a trav�s de un algoritmo que se describe m�s adelante, para monitorizar de forma continua la profundidad efectiva en un interfaz de usuario para la interacci�n del terapeuta. La unidad de proceso 13, adem�s de aplicar la l�gica de control precisa, permite la interacci�n con el terapeuta a trav�s del interfaz 16, que contiene un panel de mando 18 para recibir la consigna de trabajo y monitorizar los par�metros de la sesi�n. Incluye un indicador 17, que mediante un pitido informa al terapeuta de errores o avisos que requieran su atenci�n durante el tratamiento. Por �ltimo, el man�pulo 10 tambi�n comprende un sensor de temperatura 8, que mide de forma continua la evoluci�n de la temperatura de la zona tratada del paciente, reflej�ndose en el interfaz 16 para ser consultada por el terapeuta. Esta temperatura debe estar comprendida en un rango establecido, generalmente, entre 42 �C y 45 �C para facilitar la correcta movilizaci�n de la grasa. La monitorizaci�n de la temperatura permite al terapeuta controlar que el tratamiento se realiza adecuadamente y con seguridad. Una temperatura superior a 45 �C puede ocasionar quemaduras. Una inferior a 42 �C no genera ning�n efecto sobre la grasa corporal. La FIG. 3 ilustra esquem�ticamente un diagrama de bloques de un aparato de masaje para mostrar las relaciones funcionales entre diferentes elementos. Se muestra un motor o motorreductor 4 que aplica movimiento de giro sobre los cabezales m�viles 2. Un conjunto de sensores que incluye el sensor de temperatura 8, el sensor de fuerza vertical 15 (fuerza vertical que ejerce el terapeuta) y el sensor de parde torsi�n 14. Estos sensores efect�an mediciones para conocer la fuerza vertical y par de torsi�n que imparten los cabezales m�viles 2 en el paciente. Estas mediciones son proporcionadas a la unidad de proceso 13. De otra parte, el generador de radiaci�n electromagn�tica 12 genera radiaci�n electromagn�tica con una frecuencia y con una intensidad seleccionadas previamente por el terapeuta seg�n el tipo de masaje, por ejemplo, con la interfaz 16. Las caracter�sticas de la radiaci�n generada se proporcionan a la unidad de proceso 13. Esta adiaci�n llega al paciente a trav�s de los cabezales m�viles 2. La unidad de proceso 13 analiza la informaci�n y establece si el masaje se est� aplicando adecuadamente al paciente. Para este fin, la unidad de proceso 13 calcula el mencionado par�metro denominado profundidad efectiva que informa de la profundidad del tratamiento. Este par�metro tiene un valor que es funci�n principalmente de la fuerza vertical aplicada, del par de torsi�n y de lacantidad de grasa. Tambi�n depende secundariamente de otras caracter�sticas del paciente, tales como hidrataci�n y firmeza de la piel. La unidad de proceso 13 se programa para controlar si la fuerza vertical que aplica el terapeuta es suficiente para llegar a la capa grasa del paciente. Una profundidad menor hace que no se alcance efectivamente la zona objeto donde est� la grasa, con lo que la grasa se lic�a con la radiaci�n electromagn�tica pero no se moviliza convenientemente. Una profundidad mayor hace que llegue a la zona muscular lo que no es adecuado, es doloroso e incluso peligroso. Dados los factores de los que dependen, la profundidad efectiva var�a mucho entre pacientes, por lo que la simple medida de fuerza vertical aplicada no es suficiente para determinar si se llega a la zona objeto. Por esto, para estimar esta profundidad efectiva, en una de las realizaciones se implementa un algoritmo desarrollado que relaciona diferentes variables tomando de forma emp�rica los valores. Para obtener la relaci�n entre los dos par�metros medidos, un terapeuta experimentado aplica el equipo a un paciente y determina cu�ndo est� en un rango de profundidad efectiva adecuada y con qu� medidas de fuerza vertical y resistencia al giro, obteniendo la siguiente tabla (columna: fuerza vertical, filas: par de torsi�n, resultado: profundidad efectiva en mm) : Esta tabla se puede complementar con m�s consideraciones, por ejemplo, caracter�sticas del paciente como edad, sexo, etc. para conseguir mayor selectividad. Mediante la determinaci�n de la profundidad efectiva, se evita incorporar un plic�metro para medir la grasa corporal, reduciendo la posibilidad de error en el proceso, al ser autom�ticamente generado por el sistema sin depender del terapeuta. La FIG. 4 ilustra una gr�fica que sirve para relacionarlas variables fuerza vertical, par de torsi�n y profundidad efectiva, correspondiente con los valores de la tabla. Observar que los valores de torsi�n y fuerza vertical son adimensionales, pues corresponden son porcentajes sobre el valor directo del sensor implementado en el equipo a partir del cual se tom� la tabla de forma emp�rica. Habitualmente, las realizaciones de la invenci�n permiten seleccionar la radiaci�n que va a ser aplicada en funci�n del tipo de paciente y/o tratamiento. Se monitoriza, durante la aplicaci�n del masaje, que el par de torsi�n sea el adecuado. En caso contrario, en algunas realizaciones se emite una se�al de aviso al terapeuta. Adicionalmente, se pueden definir tipos de pacientes seg�n su masa corporal: grueso, normal, delgado. Adicionalmente, se pueden definir zonas corporales donde se va a efectuar el tratamiento. Ciertas zonas tienen una mayor o menor tendencia a acumular grasa. Los anteriores son ejemplos para personalizar de una forma sencilla el tratamiento. En otras realizaciones, se puede implementar la relaci�n emp�rica anterior mediante f�rmulas equivalentes que asocien valores de fuerza vertical y par de torsi�n con la profundidad. En las realizaciones comentadas, el terapeuta es el que decide aplicar m�s o menos fuerza asistido por el aparato de masaje. En otras realizaciones se puede regular la fuerza de giro para controlar el par y as� mantener la profundidad efectiva del tratamiento independiente de la fuerza aplicada por el terapeuta, aunque en un rango de trabajo razonable, dando un aviso si no est� fuera del rango adecuado. En otras realizaciones m�s automatizadas se puede implementar un control de la fuerza vertical, aunque complicar�a el sistema mec�nico.
Publicaciones:
ES2798315 (10/12/2020) - A1 Solicitud de patente con informe sobre el estado de la técnica
ES2798315 (18/05/2021) - B2 Patente de invención con examen
Eventos:
En fecha 27/04/2020 se realizó Registro Instancia de Solicitud
En fecha 27/04/2020 se realizó Admisión a Trámite
En fecha 27/04/2020 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 29/04/2020 se realizó Superado examen de oficio
En fecha 24/11/2020 se realizó Realizado IET
En fecha 25/11/2020 se realizó 1109P_Comunicación Traslado del IET
En fecha 30/11/2020 se realizó 3103P_Registro Solicitud Publicación Anticipada
En fecha 30/11/2020 se realizó PETEX_Petición de examen sustantivo
En fecha 30/11/2020 se realizó Concesión Publicación anticipada
En fecha 03/12/2020 se realizó 5215P_Observaciones del solicitante al IET, Opinión Escrita y/o alegaciones a observaciones de terceros
En fecha 04/12/2020 se realizó Publicación Concesión Publicación Anticipada
En fecha 10/12/2020 se realizó Publicación Solicitud
En fecha 10/12/2020 se realizó Publicación Folleto Solicitud con IET (A1)
En fecha 25/03/2021 se realizó Validación petición y/o pago de examen sustantivo conforme
En fecha 04/05/2021 se realizó No existen objeciones a la concesión de la solicitud
En fecha 04/05/2021 se realizó Finalización de Examen Sustantivo
En fecha 04/05/2021 se realizó 6121P_Comunicación finalización de examen sustantivo
En fecha 10/05/2021 se realizó Publicación finalización de examen sustantivo
En fecha 11/05/2021 se realizó Concesión con examen sustantivo
En fecha 11/05/2021 se realizó Entrega título
En fecha 11/05/2021 se realizó 6125P_Notificación de concesión con examen sustantivo
En fecha 18/05/2021 se realizó Publicación concesión Patente
En fecha 18/05/2021 se realizó Publicación Folleto Concesión
En fecha 18/11/2021 se realizó Plazo expirado presentación de oposiciones contra la concesión de la Patente
Pagos:
27/04/2020 - Pago Tasas IET
05/05/2022 - Pago 03 Anualidad
06/07/2023 - Pago 04 Anualidad
Fuente de la información
Parte de la información aquí publicada es pública puesto que ha sido obtenida de la Oficina de Propiedad Industrial de los diferentes países el 23/04/2024 y por lo tanto puede ser que la información no esté actualizada.Parte de la información aquí mostrada ha sido calculada por nuestro sistema informático y puede no ser veraz.
Privacidad
Si considera que al información aquí publicada afecta a su privacidad y desea que eliminemos la información aquí publicada envíe un email a info@patentes-y-marcas.com o rellene el formulario que encontrará aquí.Información sobre el registro de patente nacional por APARATO DE MASAJE CORPORAL con el número P202030355
El registro de patente nacional por APARATO DE MASAJE CORPORAL con el número P202030355 fue solicitada el 27/04/2020. Se trata de un registro en España por lo que este registro no ofrece protección en el resto de países. El registro APARATO DE MASAJE CORPORAL con el número P202030355 fue solicitada por TERMOSALUD, S.L. mediante los servicios del agente Isabel Carvajal y Urquijo. El registro [modality] por APARATO DE MASAJE CORPORAL con el número P202030355 está clasificado como A61H 15/00,A61H 15/02 según la clasificación internacional de patentes.
Otras invenciones solicitadas por Termosalud, S.L.
Es posible conocer todas las invenciones solicitadas por Termosalud, S.L. entre las que se encuentra el registro de patente nacional por APARATO DE MASAJE CORPORAL con el número P202030355. Si se desean conocer más invenciones solicitadas por Termosalud, S.L. clicar aquí.Otras invenciones solicitadas en la clasificación internacional de patentes A61H 15/00,A61H 15/02.
Es posible conocer invenciones similares al campo de la técnica se refiere. El registro de patente nacional por APARATO DE MASAJE CORPORAL con el número P202030355 está clasificado con la clasificación A61H 15/00,A61H 15/02 por lo que si se desea conocer más registros con la clasificación A61H 15/00,A61H 15/02 clicar aquí.Otras invenciones solicitadas a través del representante ISABEL CARVAJAL Y URQUIJO
Es posible conocer todas las invenciones solicitadas a través del agente ISABEL CARVAJAL Y URQUIJO entre las que se encuentra el registro patente nacional por APARATO DE MASAJE CORPORAL con el número P202030355. Si se desean conocer más invenciones solicitadas a través del agente ISABEL CARVAJAL Y URQUIJO clicar aquí.Patentes en España
Es posible conocer todas las invenciones publicadas en España entre las que se encuentra el registro patente nacional por APARATO DE MASAJE CORPORAL. Nuestro portal www.patentes-y-marcas.com ofrece acceso a las publicaciones de patentes en España. Conocer las patentes registradas en un país es importante para saber las posibilidades de fabricar, vender o explotar una invención en España.Patentes registradas en la clase A
Es posible conocer todas las patentes registradas en la clase A (NECESIDADES CORRIENTES DE LA VIDA) entre las que se encuentra la patente APARATO DE MASAJE CORPORAL con el número P202030355. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase A61
Es posible conocer todas las patentes registradas en la clase A61 (CIENCIAS MEDICAS O VETERINARIAS; HIGIENE) entre las que se encuentra la patente APARATO DE MASAJE CORPORAL con el número P202030355. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase A61H
Es posible conocer todas las patentes registradas en la clase A61H (APARATOS DE FISIOTERAPIA, p. ej. DISPOSITIVOS PARA LOCALIZAR O ESTIMULAR LOS PUNTOS EN DONDE SE LOCA) entre las que se encuentra la patente APARATO DE MASAJE CORPORAL con el número P202030355. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.
¿Tienes alguna duda?
Escribe tu consulta y te responderemos rápida y gratuitamente.

Otras patentes similares
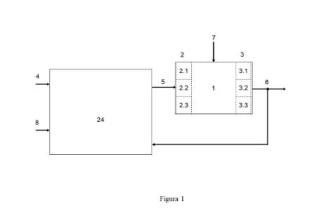
 P202030337
P202030337
SENSOR LUMINISCENTE PARA LA MONITORIZACIÓN DE RESIDUOS RADIACTIVOS Y USO DEL MISMO
P202030404Profesionales Recomendados
Barcelona
933182440
España
933182440
España

Barcelona
+34 93 362 16 97
España
+34 93 362 16 97
España

Barcelona
932 593 600
España
932 593 600
España







