


- Home /
- Publicaciones de patentes /
- Sistema de bajo ruido para la adquisición sincronizada e inalámbrica de señales de ruido ambiente en redes de sensores sísmicos
Patente nacional por "Sistema de bajo ruido para la adquisición sincronizada e inalámbrica de señales de ruido ambiente en redes de sensores sísmicos"
Este registro ha sido solicitado por
Persona física
Contacto
- Estado: Vigente
- País:
- España
- Fecha solicitud:
- 29/07/2022
- Número solicitud:
-
P202230702
- Número publicación:
-
ES2959543
- Fecha de concesión:
-
- Inventores:
-
Persona física
- Datos del titular:
-
Persona física
- Datos del representante:
-
- Clasificación Internacional de Patentes:
- G01V 1/18,G01V 1/24
- Clasificación Internacional de Patentes de la publicación:
- G01V 1/18,G01V 1/24
- Fecha de vencimiento:
Quiero registrar una patente

Reivindicaciones:
+ ES-2959543_A11- Sistema de bajo ruido para la adquisición sincronizada e inalámbrica de señales de ruido ambiente en redes de sensores sísmicos, señales para la determinación de la curva de dispersión de las ondas Rayleigh, donde el sistema es del tipo formado por una serie de nodos (12) con sensores sísmicos (11) de toma de muestras y conectados a un servidor (3) central, caracterizado por que cada nodo (12) : comprende un microcontrolador (25) ; está conectado de forma inalámbrica con el servidor (13) , disponiendo de ventanas deslizantes para el envío de las muestras; comprende un circuito de acondicionamiento (27) de la señal formado por: un módulo de conversión de tensión (18) ; un amplificador de instrumentación (17) que convierte la señal diferencial de cada sensor sísmico (11) en una señal amplificada y referenciada a masa, de forma que la señal de referencia está fijada a la mitad de la máxima tensión de alimentación aportada por el módulo de conversión de tensión (18) ; y un filtro antisolapamiento (20) paso-bajo, con frecuencia de corte controlada por una señal de reloj emitida por el microcontrolador (25) . 2- Sistema de bajo ruido para la adquisición sincronizada e inalámbrica de señales de ruido ambiente en redes de sensores sísmicos, según la reivindicación 1, caracterizado por que el amplificador de instrumentación (17) tiene una ganancia de entre 1000 y 10.000 mediante un amplificador operacional de bajo ruido (19) . 3- Sistema de bajo ruido para la adquisición sincronizada e inalámbrica de señales de ruido ambiente en redes de sensores sísmicos, según la reivindicación 1, caracterizado por que comprende un protocolo de sincronización entre todos los nodos (12) y de control de la desviación o deriva entre cada uno de ellos y el servidor (13) .
Los productos y servicios protegidos por este registro son:
G01V 1/18 - G01V 1/24
Descripciones:
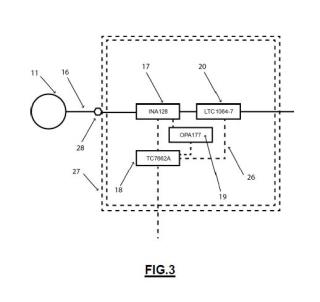
+ ES-2959543_A1 SISTEMA DE BAJO RUIDO PARA LA ADQUISICIÓN SINCRONIZADA E INALÁMBRICA DE SEÑALES DE RUIDO AMBIENTE EN REDES DE SENSORES SÍSMICOS Campo de la invención La presente invención se enmarca en el sector de la exploración geofísica, y más concretamente en el campo de la microzonación sísmica mediante medidas simultáneas de varios sensores sísmicos (matriz de sensores) . El registro sincronizado y simultáneo de las vibraciones ambientales (también conocido como ruido ambiente o ruido sísmico) por parte de una matriz de sensores, permite posteriormente, mediante el correspondiente análisis, la obtención de la curva de dispersión de las ondas superficiales o Rayleigh, y por tanto, la caracterización del tipo de suelo. Antecedentes de la invención Estudios recientes en todo el mundo han demostrado la importancia de la geología local en los desastres sísmicos y sus consecuencias. El movimiento del suelo puede amplificarse drásticamente, dependiendo de las características particulares del subsuelo, aumentando los efectos sísmicos. Por lo tanto, la caracterización del suelo se convierte en un tema crucial en los estudios de riesgo sísmico, particularmente en áreas urbanas ubicadas sobre sedimentos blandos. Esta caracterización se puede realizar a través de diferentes métodos, básicamente clasificados en técnicas geotécnicas y geofísicas. Dentro del segundo grupo, los métodos de sísmica pasiva basados en mediciones de ruido sísmico se han vuelto muy populares en las últimas décadas, ya que constituyen una herramienta no invasiva y de menor coste, especialmente adecuada para áreas urbanas. El ruido sísmico ambiental corresponde a las vibraciones en la superficie terrestre debidas a diferentes causas naturales y artificiales. Estas vibraciones son imperceptibles para el ser humano, pero no para los sensores sísmicos. Por lo que su registro y análisis brinda información valiosa sobre las propiedades del medio que atraviesa, esto es, las características del suelo. El cálculo de los perfiles de velocidad de las ondas de cizalla u ondas S proporciona nformación valiosa para predecir la respuesta del suelo en caso de un terremoto. Una de las técnicas más comunes utilizadas para la caracterización del suelo es el método de relación espectral horizontal a vertical (H/V) . En este caso, se requiere un solo sensor de tres componentes. La relación entre el componente vertical y el promedio de los dos componentes horizontales proporciona información sobre la frecuencia de resonancia del suelo en estudio. Si alguna de las frecuencias de las ondas sísmicas coincide con la frecuencia de resonancia del suelo, entonces, su amplitud se verá drásticamente amplificada, aumentando dramáticamente los efectos del sismo asociado. Las técnicas de matriz basadas en mediciones de ruido sísmico constituyen también una herramienta notable para la caracterización del suelo. Estas técnicas requieren varios sensores verticales registrando simultáneamente. Después de eso, se pueden aplicar diferentes técnicas para el análisis de los datos. Tres de los métodos más utilizados son la técnica de autocorrelación espacial (SPAC) , el método de autocorrelación espacial extendida (ESAC) y el método de frecuencia-número de onda (F-K) . La aplicación de cualquiera de estos métodos permite obtener la velocidad de propagación de las ondas a través del medio en función de la frecuencia, lo que se conoce como curvas de dispersión. Una vez que se obtiene la curva de dispersión, mediante un proceso de inversión se puede estimar el perfil de velocidad de la onda S correspondiente, y caracterizar el tipo de suelo, lo cual es de gran importancia para conocer como un terremoto puede afectar en mayor o menor medida a la zona bajo estudio. La presente invención se enmarca en este segundo tipo de medidas, en matriz, donde se requiere el registro simultáneo de varios sensores sísmicos y donde la sincronización entre todas las medidas es crucial para el posterior análisis de las señales registradas. Desde el punto de vista de su implementación y de los recursos necesarios, todas estas técnicas requieren de varios sensores y un digitalizador multicanal para registrar varias señales simultáneamente. La adquisición de estos digitalizadores, junto con los sensores correspondientes supone un importante desembolso económico que no está al alcance de todos los grupos de investigación. Por ello, los avances en las investigaciones relacionadas con la caracterización del subsuelo o la amenaza sísmica suelen verse limitados por el excesivo coste de la instrumentación necesaria. En el caso de medidas de ruido sísmico o ruido ambiente, las vibraciones que se desea detectar presentan una amplitud muy pequeña, alrededor de 10-10 a 10-2 m/s, y un ancho de banda entre 0, 001 y 50 Hz. El sensor sísmico, de forma general, actúa como un transductor de velocidad, desplazamiento o aceleración a la señal eléctrica, aunque para el caso de aplicación de la invención, suelen ser sensores de velocidad. Los instrumentos típicos utilizados para ruido sísmico son sensores de período corto, que presentan un comportamiento paso alto con frecuencia de corte entre 0, 2 y 4, 5 Hz, o sensores de banda ancha, que presentan una respuesta plana de aproximadamente 0, 01 a 50 Hz. La sensibilidad de estos sensores está comprendida entre 100 y 400 V/m/s, para los sensores de periodo corto, o entre 800 y 2000 V/m/s para los de banda ancha. Comercialmente, existen equipos de adquisición de señales sísmicas de uno o tres componentes que se pueden registrar como estaciones autónomas, grabar los datos de forma local en cada equipo y/o transmitirlos mediante cable o de forma inalámbrica a un equipo central. Sin embargo, esto requiere de varios conjuntos sensor-sistema de adquisición, lo cual aún encarece más el coste. Y, sobre todo, no es un sistema optimizado y preparado para medidas en red o matriz de sensores sísmicos. Sí que existen otros equipos comerciales que disponen de un sistema de adquisición multicanal al que se le pueden conectar varios sensores y cuyo objeto principal es la medida simultánea en red de varios geófonos o sensores sísmicos. La mayoría de estos equipos son cableados, lo que dificulta su implementación en ciertos entornos urbanos, donde la disposición de los geófonos debe adaptarse a los espacios libres disponibles y sus geometrías. Todo ello, junto con el creciente desarrollo de microcontroladores y plataformas electrónicas de código abierto, ha llevado al desarrollo de registradores sísmicos ad-hoc por parte de algunos investigadores. Muchos de ellos están enfocados a medidas de un sensor vertical, medidas de tres componentes para posterior análisis H/V, exploración geofísica, monitorización sísmica en edificios, etc. En el caso concreto de medidas en matriz, la adquisición de las señales de cada sensor debe ealizarse de forma sincronizada y coordinada, actuando como un conjunto en sí y no cada una de forma individual. A continuación, se citan algunos de los trabajos desarrollados para la toma de medidas en matriz o red de sensores: a) Picozzi et al (https://doi.org/10.3390/s100403280) han desarrollado un sistema inalámbrico para medidas en matriz de ruido sísmico. En este caso, la señal del sensor sísmico va directamente conectada al conversor analógico-digital, el cual incorpora un filtro antisolapamiento pero ningún otro tipo de acondicionamiento de la señal. La sincronización del sistema, así como la estabilidad temporal, están asociadas a la precisión del GPS. b) En el trabajo de Soler-Llorens et al. (https://doi.org/10.3390/s19194087) se establece una red de sensores (o nodos) inalámbrica mediante el protocolo de comunicación Zigbee para la gestión de la adquisición de las señales sísmicas y la sincronización entre las medidas de cada sensor. Los datos se recogen localmente en cada nodo, por lo que el principal inconveniente es que hay que quitar las tarjetas de memoria de cada nodo y acceder a los archivos uno por uno. Además, este sistema no permite la visualización de las señales en tiempo real, lo que impide detectar en el campo los problemas asociados al mal funcionamiento de un geófono o errores en las conexiones. c) En el trabajo de Yin Zhiyuan (https://doi.org/10.3390/s20041018) se presenta un sistema de varias matrices o redes de sensores que utilizan conexión WiFi para la comunicación entre sensores y tecnología LTE para la comunicación entre los diferentes grupos o matrices. En este caso, el objeto del trabajo no es estrictamente en el campo de la microzonación sísmica. La sincronización del sistema y la estabilidad temporal están asociadas a la precisión de la señal de GPS. Estos sistemas presentan ciertos inconvenientes: • Las señales sísmicas están conectadas directamente al conversor analógico-digital o a un circuito de adquisición de relativamente baja relación señal-ruido (SNR) . Esto los hace aptos para señales de relativamente alta amplitud, pero no tanto para ruido sísmico. • La sincronización entre las estaciones está asociada a la precisión de la señal de GPS. • No se tiene en cuenta la posible deriva temporal debida al reloj interno de los microprocesadores. Para medidas de varias horas, esta deriva puede introducir rrores notables en el análisis posterior de las señales. • En algunos casos, la grabación de los datos se realiza de forma local en cada uno de los nodos de la red de sensores. • En algunos sistemas no es posible la visualización de datos en tiempo real, lo que impide la detección de errores en el campo, con el coste económico que conlleva tener que desplazarse de nuevo y repetir la medida. Para ello, la presente invención se centra en una propuesta de un sistema integral, viable económica y técnicamente, basado en la adquisición mediante una red de sensores sísmicos de ruido ambiente, y que permite dar solución a los problemas técnicos comentados anteriormente. Explicación de la invención La invención es un sistema de bajo ruido para la adquisición sincronizada e inalámbrica de señales de ruido ambiente en redes de sensores sísmicos según la reivindicación independiente. Sus variantes se definen en las demás reivindicaciones y se describen en el resto de la memoria. El sistema de la invención permite registrar de forma inalámbrica en un solo servidor todas las medidas obtenidas desde los diferentes geófonos o sensores sísmicos. El análisis directo de estas señales permite obtener la curva de dispersión de las ondas Rayleigh (velocidad de las ondas en función de la frecuencia) y a partir de ahí, la estimación del perfil de velocidad de las ondas de cizalla en el área bajo estudio (caracterización del tipo de suelo) . Para la consecución del objeto de la invención se ha desarrollado un sistema compuesto por una serie de nodos conectados a un geófono o sensor sísmico que miden al menos la componente vertical del movimiento del suelo y a un servidor central que recogerá las muestras de cada nodo vía Wi-Fi y las irá mostrando y guardando en ficheros localmente. La disposición de los nodos normalmente será alrededor del servidor, con una apertura que depende de la profundidad de los sedimentos que se vayan a analizar. El área que se puede medir con el sistema desarrollado es hasta unos 250 metros de diámetro en campo abierto y libre de interferencias. El número máximo de nodos permitidos en el sistema es de 10 y se componen de un circuito daptador diseñado específicamente para el geófono o sensor sísmico, un conversor analógico digital (ADC) de 8 canales de 24 bits y un microcontrolador CC3200 que se encarga de gestionar la toma de muestras, las comunicaciones y la sincronización con el servidor. El servidor preferido está compuesto por una Raspberr y Pi modelo 4B al cual se le conecta una tarjeta W i-Fi-USB de alta potencia. Al servidor se le conectará un portátil para poder acceder a la interfaz de usuario por medio de un navegador web. Se ha diseñado una interfaz donde se puede interactuar con el sistema, iniciando y finalizando los registros, sincronizando los nodos, y además se visualiza las señales de los nodos en tiempo real. Alguna de las características diferentes que aporta la invención desarrollada son: - Circuito de acondicionamiento de la señal de bajo ruido en cada nodo. Permite adaptar la baja amplitud del ruido sísmico a una señal de voltios adaptada al rango dinámico del conversor analógico digital. - Comunicación entre nodos y servidor mediante un protocolo propio exclusivo a través de UDP. Esto ha implicado la invención e implementación de un sistema propio que controle el flujo ordenado de los paquetes que contienen las muestras y del control de errores y recuperación. - Creación de una red Wi-Fi para la comunicación entre nodos y servidor. El hecho de que los nodos estén en la misma red Wi-Fi ha llevado a implementar un mecanismo exclusivo basado en slots de tiempo de transmisión para que transmita cada nodo sin que se produzca una colisión ya que el medio es compartido y los nodos comienzan a muestrear a la misma vez. El mecanismo de retransmisión de tramas perdidas también está supeditado a los slots de tiempo de transmisión. - Protocolo propio de sincronización entre todos los nodos, y control de la desviación o deriva entre cada uno de ellos y el servidor. Este aspecto es fundamental para el posterior correcto análisis de las señales registradas. - Rápido y fácil despliegue de todo el sistema para realizar una serie de medidas, ahorrando en tiempo ya que no se tienen que desplegar ningún tipo de cableado hasta los nodos. - Visualización de cada una de las señales muestreadas por cada nodo en tiempo real. De esta manera se pueden detectar si se está midiendo correctamente o hay algún problema con algún nodo. - Centralización de las muestras de los sensores y disponibilidad del registro en formato estándar nada más finalizar el registro. En base a la señal captada y las capacidades de los sensores sísmicos, la señal de tensión proporcionada por el geófono o el sensor sísmico, en el caso de medidas de ruido ambiente, es de muy baja amplitud y su conexión directa al conversor analógico digital solo proporciona una señal de muy baja resolución y que no serviría para los propósitos de caracterización del tipo del suelo. Por ese motivo es necesario un circuito de acondicionamiento que transforme la señal registrada por el sensor sísmico a unos niveles de tensión y a un rango de frecuencias que se ajusten al rango dinámico del conversor analógico digital utilizado. No obstante, dada la baja amplitud de las señales registradas, la simple amplificación y filtrado de la señal puede llegar a no ser suficiente. Es importante que el ruido interno del circuito diseñado esté por debajo de los mínimos niveles de ruido sísmico que se puedan registrar. De otro modo, la señal de interés quedaría enmascarada por el ruido del propio circuito. En la presente invención se ha desarrollado un circuito de acondicionamiento de la señal de bajo ruido interno, adaptado a los objetivos de la propia invención. El circuito de acondicionamiento se compone básicamente de los siguientes módulos: 1. Módulo de conversión de tensión (por ejemplo el TC7662A) . Proporciona la tensión de alimentación necesaria para cada uno de los integrados del circuito. Es capaz de proporcionar una tensión simétrica. En este caso los integrados trabajan con tensiones de 5V y +-5V-. 2. Amplificador de instrumentación. Convierte la señal diferencial del geófono en una señal amplificada y referenciada a masa. La ganancia del sistema se controla mediante una resistencia externa. Dada la baja amplitud del ruido sísmico, la resistencia seleccionada es tal que sea capaz de proporcionar una ganancia de 1000 o 10000. La elección de la ganancia depende del tipo de emplazamiento seleccionado. En sitios relativamente tranquilos, la ganancia de 10000 puede ser la más apropiada. En lugares urbanos, con un mayor nivel de ruido ambiente, se recomienda una ganancia de 1000, pues la ganancia de 10000 puede llegar en ocasiones a saturar la señal. La ganancia es seleccionable por una resistencia que preferiblemente se selecciona de 5Q para conseguir el máximo de ganancia y así conseguir que la señal sísmica se ajuste perfectamente al rango dinámico del conversor de 23 bits. Como se ha comentado anteriormente, la amplitud del ruido interno del circuito en general y de los integrados en particular, es crucial para el correcto funcionamiento del sistema. En este caso, el amplificador de instrumentación se caracteriza por un bajo ruido del orden de 0.2uVpp. La señal de referencia, conectada al terminal 5, se fija a la mitad de la máxima tensión de alimentación, esto es a 2.5V. Para ello se utiliza un amplificador operacional de bajo ruido que actúa como seguidor de tensión con una muy baja impedancia de salida. 3. Filtro antisolapamiento. Se trata de un filtro paso-bajo, de orden 8, de capacidades conmutadas cuya frecuencia de corte se controla mediante una señal de reloj externa. La señal cuadrada de reloj es proporcionada por el propio microcontrolador del nodo y de este modo, vía software, se escoge la frecuencia de corte deseada. En el sistema de la invención, la frecuencia de muestreo es normalmente de 100Hz y la frecuencia de corte del filtro se ha seleccionado en 15Hz. Esta frecuencia de corte asegura una atenuación suficiente a la frecuencia de Nyquist (evitando posibles solapamientos) y a la vez incluye el rango de frecuencias de interés en los estudios de caracterización del terreno. La comunicación entre el conversor analógico digital y el microcontrolador se realiza mediante el bus de comunicación SPI. A través de la interfaz SPI, los datos digitalizados son enviados al microcontrolador para poder ser guardados y transmitidos al servidor. Es importante destacar que el circuito de acondicionamiento y el conversor analógico digital se alimentan con su propia fuente de alimentación o batería, independiente de la utilizada para alimentar al microcontrolador. Esto evita posibles interferencias que pudieran propagarse entre los dos sistemas a través de las conexiones de alimentación. Como microcontrolador preferido se escoge la plataforma TI LaunchPad CC3200 por su bajo consumo y porque en ella se integra la interfaz Wi-Fi y sus librerías. Los nodos realizan la toma de muestras y su conversión, conectan con el servidor por una red inalámbrica, calculando el tiempo de retardo y de deriva. Los nodos configuran los temporizadores para ser sincronizado con el servidor NTP mediante un temporizador Heartbeat. En paralelo, reciben las tramas y envían paquetes al servidor por UDP (protocolo de datagramas de usuario) y los acuses de recibo (ACK) . Las muestras se toman con un periodo fijado, por ejemplo de 10 ms. Cada momento lee el valor del tiempo y de los canales, y agrupa las muestras en paquetes, por ejemplo de 100 muestras que corresponden a un segundo, para enviarlas al servidor. La información del tiempo permite asegurar que la frecuencia de muestreo se mantiene estable, dando tiempo para ejecutar todos los pasos entre cada par de muestras. Es importante asegurar la sincronización de los nodos, entre ellos y con el servidor, para que los momentos de cada muestreo sean idénticos y puedan extraerse los datos buscados. Para ello cada nodo se conecta al servidor por una trama de tipo Helio y le solicita el tiempo de la red (NTP) . A partir de ahí se sincroniza en dos fases. Una primera mediante intercambio de tramas entre servidor y nodo, en el cuál ambos guardan el tiempo de cada trama en cada punto (Sti, Nt2, Nía, St4...) . A partir de esos tiempos se calculará el desfase y la deriva entre ambos. La fórmula utilizada, para la secuencia de cuarenta tramas, es: T di + d2 + di Donde Ti es el tiempo total que tarda una única secuencia de tramas de sincronización y sus respuestas, d i es el tiempo que tarda en viajar una trama desde el servidor hasta el nodo, d2 es el tiempo de procesamiento invertido en el nodo hasta que envía una respuesta, y d3 es el tiempo que se tarda en transmitir la respuesta al nodo. TTi es el tiempo invertido en la transmisión de ida y vuelta, es decir d i y d3 , sin contar con el tiempo de procesamiento, STi es la estampa de tiempo (TimeStamp) del servidor en el instante i, NTi es el TimeStamp del nodo. El drifti es la diferencia de tiempos entre server y nodo de la secuencia i. Estableceremos como el tiempo de transmisión total (TTTota) al valor mínimo obtenido en la secuencia de 40 tramas, y la diferencia total (DriftTota) a la media de los valores de diferencia dados en la secuencia de 40 tramas. En la segunda fase se utilizarán las tramas tipo Helio. En ellas cada nodo guardará su tiempo usto antes de enviar el Helio. Para que no se produzcan colisiones de las tramas en la Wi-Fi, ya que es un medio compartido, cada Nodo envía su trama Helio con un desfase respecto de las anteriores (1 segundo, por ejemplo) y de forma secuencial varias veces. El servidor irá guardando los dos instantes de tiempo del Helio: el registrado por el nodo y cuando el servidor lo ha recibido. Cuando tenga los instantes de tiempo de varias tramas Helio de cada nodo, el servidor calculará el desfase de tiempo que hay para cada trama Hello de la siguiente manera (para 10 tramas) : Donde driftHi es la diferencia de tiempos entre el servidor y el nodo de una trama obtenida del envío de una trama, y DriftHTotal es la media de las últimas 10 tramas recibidas. El desfase total del nodo (DriftHTotai) será la media de los valores. A continuación, el servidor enviará una indicación al nodo para que adelante o atrase su tiempo X milisegundos si el desfase total es mayor de 5ms. Se ha establecido el umbral de 5ms porque tiene que ser menor que el periodo de muestreo (10ms) , de esta manera nos aseguramos de que la diferencia de tiempos no llegue a ser de 1 muestra. El buffer encargado de almacenar los tiempos de las tramas Hello siempre guardará el tiempo de las últimas, excepto cuando se realice un ajuste del tiempo, en donde se reseteará a cero y habrá que esperar a recibir otras tramas. Finalizada la fase 2, los nodos ya estarán sincronizados y se mantendrán con una diferencia de 5ms como máximo. En este momento el sistema ya estará preparado para realizar una medida. Durante el registro, los nodos tenderán a desfasarse entre ellos en función de la duración del registro, cuanto más largo más desviación. Para evitar esta situación se ha desarrollado un método de sincronización. En la trama donde se envía un alto número de muestras, se guarda el tiempo del nodo justo antes de enviarse la trama, que será con una frecuencia conocida. El servidor, a la vez que recibe las muestras, recibe el tiempo del nodo volverá a aplicar el ecanismo de la fase 2, es decir, almacenará en el buffer los valores de los últimos tiempos de envío y recepción, calculará la media del desfase de tiempo y si es mayor de 5ms enviará una orden para que se reajuste el nodo. Otra parte importante es el protocolo desarrollado para la transmisión de las muestras a través de UDP y que garantiza la entrega de las muestras de manera secuencial y sin errores. En el caso de producirse pérdidas de paquetes de muestras, el sistema es capaz de reenviarlas soportando cortes de transmisión ya que los nodos poseen un buffer capaz de almacenarlas. Se han definido los siguientes tipos de tramas con sus correspondientes campos para la realización preferida: Tabla 4. Tipos de mensajes Los mensajes Tipo 1 (SO, Sampling Order) se utilizan para enviar las órdenes de START/STOP de los registros de acuerdo con el valor del campo Código: • Código = 1: Indica que el Nodo comenzará a muestrear inmediatamente después de recibir esta trama y enviará al Servidor las muestras. • Código = 2: Indica que el Nodo finalizará el muestreo inmediatamente después de recibir esta trama y enviará las muestras que hayan quedado pendientes. • Código = 3: Indica que el Nodo comenzará a muestrear inmediatamente después de recibir esta trama y no enviará al Servidor ninguna muestra. • Código = 5: Indica que el Nodo comenzará a muestrear en el siguiente segundo después de recibir esta trama y enviará al Servidor las muestras. Los mensajes Tipo 2 (SR, Samples Reply) están relacionados con el envío y recepción de las muestras. • Código = 1: contiene el valor de 100 instantes de muestras. Cada instante de muestras está formado por una marca que se corresponde con el valor de los milisegundos del instante de tiempo en que se tomaron las muestras (2 Bytes) , el valor del canal 1 del ADC que se corresponde con el eje X (3 Bytes) , el valor del canal 2 del ADC correspondiente al eje Y (3 Bytes) , y por último el valor del canal 3 del ADC correspondiente al eje Z (3 Bytes) . Aunque la utilización generalizada del sistema de invención es con geófonos verticales, con una sola componente, el sistema está preparado para trabajar también con sensores sísmicos triaxiales, lo que proporcionaría el movimiento del suelo en la componente vertical (Z) así como en las dos componentes horizontales (X e Y) . • Código = 2: Confirma al Nodo de la correcta recepción de las muestras hasta el número de secuencia indicado. El mensaje Tipo 5 se corresponde a la trama Helio donde en el campo UTC System Time se guarda el valor del tiempo UTC en formato segundos, y en el campo Millisecs System Time se guarda el valor de los milisegundos. Los mensajes Tipo 6 (ST, Set Timer) están relacionados con el ajuste del tiempo y el reloj de los nodos. • Código = 1: configura y establece el valor del contador del Timer que controla el tiempo e muestreo que es de 10ms. Con este campo controlamos la deriva del reloj interno del microcontrolador CC3200. • Código = 2: el Nodo confirma que ha configurado el nuevo valor en el registro del Timer. • Código = 5: valor en milisegundos del retraso/adelanto que tiene que aplicar en el RTC interno del microcontrolador. • Código = 6: el Nodo confirma que ha aplicado el retraso/adelanto en el valor del RTC. Los mensajes Tipo 7 (TS, TimeStamp) se utilizan para marcar el tiempo tanto del comienzo del muestreo (tiempo cuando se va a producir la primera muestra del registro) , como la finalización de la última muestra del registro en cada Nodo. Estas tramas sirven como marcas calculándose con exactitud el tiempo invertido en el registro y si falta ajustar el reloj de algún nodo. • Código = 1: TimeStamp del inicio del registro al producirse la primera muestra • Código = 2: indica al Servidor que el Nodo ha llegado a la muestra marcada para resincronizar con el método Stop&Go. • Código = 3: TimeStamp del final del registro al producirse la última muestra Los mensajes Tipo 9 (SC, Sync CLK) se utilizan en la fase 1 de la sincronización para el cálculo del desfase y la deriva. Se utiliza un proceso de tres vías. • Código = 1: el Servidor inicia la trama marcando su tiempo. • Código = 2: el Nodo devuelve la trama marcando su tiempo en el que la recibió del Servidor y también marcando el tiempo cuando va a enviarla de vuelta al Servidor. • Código = 3: El Servidor devuelve al Nodo la trama completa con los cuatro tiempos para que pueda calcular el desfase y la deriva. Para garantizar la recepción de las muestras de forma ordenada se ha implementado un mecanismo de ventana deslizante aplicado a slots de tiempo para la retransmisión. Para evitar la colisión de las tramas que contienen las muestras, se ha definido slots de transmisión para cada nodo. Para conseguir esto, la primera trama de cada nodo comprenderá un número diferente de muestras. Así se genera directamente una separación en los envíos siguientes, todos iguales en número de muestras. Por ejemplo, para diez nodos, el primer envío del primer nodo será de 10 muestras. El segundo enviará 20... de forma que cada nodo termina de preparar su trama y la envía en momentos diferentes. A partir de ese omento todos enviarán grupos iguales de muestras. Se ha desarrollado un mecanismo de acuse de recibo cada número de tramas. El servidor y el nodo irán almacenando las últimas tramas recibidas/enviadas. Si el servidor si recibe las tramas y detecta que las muestras son consecutivas, observando el tiempo o el número de secuencia, entonces enviará una trama de acuse de recibo ara indicarle al nodo de que las ha recibido correctamente. En este instante el servidor y el nodo vaciarán su buffer a la espera de las siguientes. Si en el transcurso de la recepción de dichas tramas se pierde alguna, el servidor enviará un acuse de recibo incluyendo la última muestra correcta recibida. El nodo calculará cuántas tramas debe reenviar y cuando le toque su ventana de transmisión enviará todas las tramas seguidas que pueda durante el tiempo de ventana. Si quedaran tramas pendientes de enviar, el nodo se esperará al siguiente slot para transmitirlas, así hasta que las haya transmitido todas. Gracias a la implementación de este método de recuperación de tramas perdidas se ha podido incrementar el área a medir considerablemente, pasando de 20-30 metros de diámetro a una distancia sobre los 250 metros de diámetro. Otras realizaciones se describirán más adelante. Se ha de tener en cuenta que, a lo largo de la descripción y las reivindicaciones, el término "comprende" y sus variantes no pretenden excluir otras características técnicas o elementos adicionales. Breve descripción de las figuras Para complementar la descripción que se está realizando y con objeto de ayudar a una mejor comprensión de las características de la invención, se acompaña como parte integrante de dicha descripción, un juego de dibujos en donde con carácter ilustrativo y no limitativo, se ha representado lo siguiente: En la figura 1 se muestra un dibujo de la caja externa de la invención, indicando cada una de las conexiones, botones, etc. En la figura 2 se muestra un diagrama de bloques con los componentes que integran cada no de los nodos. En la figura 3 se muestra esquemáticamente el diagrama de bloques del circuito de acondicionamiento. En la figura 4 se muestra a modo de ejemplo una posible distribución de los geófonos y nodos, donde el servidor se encuentra en el centro y los nodos distribuidos a lo largo de una circunferencia exterior. En la figura 5 se muestra el resultado obtenido para el caso de ejemplo. Exposición detallada de unos modos de realización Se describe a continuación una serie de formas de realizar la invención, como ejemplos descriptivos pero que no buscan limitar la invención. La realización de la invención que se describe con apoyo de las figuras 1 a 4 consta de varios nodos (12) conectados a sendos geófonos o sensores sísmicos (11) . Todos los nodos (12) se conectan de forma inalámbrica a un servidor (13) , en cual se encarga del control de las comunicaciones y del registro de todos los datos. Para la configuración de la adquisición y visualización en tiempo real de las señales registradas, se conecta el servidor (13) con un ordenador portátil (15) u otro sistema de computación mediante cable (14) Ethernet y se opera a través de un explorador web. Cada uno de los nodos (12) de la invención realizada se compone internamente de los elementos que se muestran en las figuras 2 y 3. Los nodos (12) se pueden configurar mediante un puente para muestrear sensores sísmicos (11) de un solo canal o sensores de tres componentes (tres canales) . Por lo tanto, la matriz que se implementa en el campo puede ser híbrida. El servidor web se configura solo y muestra el gráfico de un canal o de tres canales para cada sensor sísmico (11) . Cada nodo del sistema posee un circuito de acondicionamiento (27) formado internamente por los siguientes bloques: • Módulo de conversión de tensión (18) . Proporciona la tensión de alimentación ecesaria para cada uno de los demás elementos del circuito. Es capaz de proporcionar una tensión simétrica. En este caso los integrados trabajan con tensiones de 5V y ±5V. • Amplificador de instrumentación (17) . Convierte la señal diferencial de cada sensor sísmico (11) en una señal amplificada y referenciada a masa. La ganancia del amplificador de instrumentación (17) se controla mediante una resistencia externa, la cual se puede configurar para proporcionar ganancias crecientes, por ejemplo de 1000 o 10000, según sea necesario. La señal de referencia de este amplificador de instrumentación (17) se fija a la mitad de la máxima tensión de alimentación, esto es a 2, 5V. • Amplificador operacional de bajo ruido (19) que actúa como seguidor de tensión con una muy baja impedancia. • Filtro antisolapamiento (20) . Se trata de un filtro paso-bajo, de orden ocho, de capacidades conmutadas cuya frecuencia de corte se controla mediante una señal de reloj externa. La señal cuadrada de reloj es proporcionada por un microcontrolador (25) y de este modo, vía software, se escoge la frecuencia de corte deseada. En el sistema de esta realización, la frecuencia de muestreo es de 100 Hz y la frecuencia de corte del filtro se ha seleccionado en 15 Hz. Esta frecuencia de corte asegura una atenuación suficiente a la frecuencia de Nyquist (evitando posibles solapamientos) y a la vez incluye el rango de frecuencias de interés en los estudios de caracterización del terreno, siendo entre 0-50Hz. Para la realización de registros de ruido sísmico es requisito indispensable tener la máxima ganancia posible con el menor ruido interno posible para así detectar con mayor relación señal-ruido la señal sísmica. Este requisito nos lleva a elegir componentes de muy bajo ruido y bajo consumo como es el caso del INA128 como amplificador de instrumentación (17) y OPA177 como amplificador operacional (19) que se ajustan a nuestros requerimientos. Los requisitos necesarios en la realización preferida son: - Módulo de conversión de tensión (18) : o Rango de operación entre 3V-18V o Corriente de salida de 40mA o Baja impedancia, 40 Q o Potencia de disipación superior a 700mW - Amplificador de instrumentación (17) : o Rango de operación entre 3V-18V o Bajo voltaje offset, máximo 50^V o Baja deriva, máximo 0, 5^V/°C o Corriente Bias de entrada 5nA o Corriente menor de 750^A - Amplificador operacional (19) : o Rango de operación entre 3V-18V o Bajo voltaje offset, máximo 25^V o Baja deriva, máximo 0, 3^V/°C o Corriente típica máxima de 1.5mA - Filtro antisolapamiento (20) : o Rango de operación entre 3V-16V o Frecuencia de corte hasta 100Hz o Troughput minimo 72dB La señal de salida del circuito de acondicionamiento (27) , amplificada y filtrada, se conecta directamente a un conversor analógico digital (23) . Por ejemplo, el conversor ADS1256, que permite digitalizar hasta un máximo de 8 canales a 24 bits (23 bits efectivos) . En el sistema de la realización se utiliza un canal, correspondiente a la componente vertical del sensor sísmico (11) , pero el sistema puede digitalizar, si fuera necesario, los tres canales correspondientes a un sensor triaxial. La señal digitalizada se envía mediante el bus SPI (24) al microcontrolador (25) , en este caso CC3200, donde la señal no sólo se guarda temporalmente de forma local, sino que también se envía vía Wi-Fi al servidor (13) . Para alimentar el sistema se utilizan dos baterías externas (21, 22) . La primera batería (21) se encarga de suministrar la tensión y corriente necesarias para el circuito de acondicionamiento (27) y para el conversor analógico digital (23) . La segunda batería (22) se encarga de alimentar el microcontrolador (25) . Ambas baterías (21, 22) son de idénticas características y en la realización se ha optado por baterías de 5V, 1A con capacidad de 4000mAh. De ese modo, al alimentarse de forma independiente, se evitan posibles interferencias ante picos de demanda de corriente que podrían producirse en la transmisión vía Wi-Fi por parte del microcontrolador (25) . Los cables (26) a través de los cuales se proporciona la tensión continua se muestran mediante línea discontinua en las figuras 2 y 3. La selección de los diferentes elementos del circuito de acondicionamiento (27) se ha realizado teniendo siempre en cuenta el nivel de ruido interno de los mismos, a fin de lograr un muy bajo ruido. La amplitud del ruido interno del circuito de acondicionamiento (27) en general y de los integrados (amplificador de instrumentación (17) , amplificador operacional de bajo ruido (19) y filtro antisolapamiento (20) en particular es crucial para el correcto uncionamiento del sistema. En el caso del módulo de conversión de tensión (18) , no solo se ha tenido en cuenta el nivel de ruido interno, sino también que sea capaz de proporcionar la corriente máxima necesaria para el correcto funcionamiento del resto de los integrados citados. La corriente típica calculada para los tres chips según los datasheets es de 16 mA, siendo 0, 7 mA del amplificador de instrumentación (17) , 1, 3 mA del amplificador operacional de bajo ruido (19) , 14 mA del filtro antisolapamiento (20) , y la corriente máxima es de 30, 75 mA. El módulo de conversión de tensión (18) es capaz de proporcionar un total de 40mA por lo que tenemos más de un 100% de corriente disponible si tenemos en cuenta el consumo normal, y de un 30% superior si tenemos en cuenta el consumo máximo. En la figura 1 se muestra el aspecto externo de cada uno de los nodos (12) , apreciándose el exterior de la carcasa o caja (9) . Esta caja (9) tiene ranuras (1, 4) para introducir las baterías (21, 22) en la caja. Estas ranuras (1, 4) permiten sustituir las baterías (21, 22) desde el exterior de la caja. Posee igualmente un conector (5) preparado para recibir un cable adaptador (16) por medio de un cabezal (28) . El conector (5) es generalmente macho, del tipo 3-Pole MiniPL SPEC comercializado por Pak, para exteriores. La caja (9) comprende una serie de pilotos (2, 8) , LED, para indicar la conexión correcta de las baterías (21, 22) y cualquier otra indicación necesaria. También comprende un botón de reset (3) del nodo (12) y un botón de conexión (6) que envía una trama "hello" al servidor (13) . Otros botones (7) tienen funciones menos relevantes o futuras. La caja (9) posee una antena (10) , por ejemplo para WiFi que facilita la transmisión inalámbrica y permite alcanzar mayores distancias de comunicación. Los pasos para el manejo del sistema son los siguientes: a) En el área seleccionada a medir se desplegarán e instalarán los sensores sísmicos (11) , identificándolos con un número y tomando nota de las posiciones relativas entre cada uno de ellos, Como ejemplo, en la figura 4 se muestra una disposición circular con el servidor (13) y el ordenador portátil (15) en el centro, y seis sensores sísmicos (11) con sus respectivos nodos (12) distribuidos uniformemente a lo largo de una circunferencia de radio igual a 20 metros. b) Una vez insertados los sensores sísmicos (11) en el suelo y conectados a sus correspondientes nodos (12) , se encenderá el servidor (13) y se irá encendiendo cada nodo (12) y comprobando en los pilotos del nodo (8) que se conecta a la red Wi-Fi del servidor (13) . c) Una vez se haya iniciado el nodo (12) , aparecerá en la interfaz web el indicador del correspondiente nodo (12) , indicando que tiene comunicación con el nodo (12) . d) Tras establecer comunicación un nodo (12) , el servidor (13) iniciará el proceso de sincronización con cada nodo (12) , empezando por el primero. Los pilotos del nodo (8) irán indicando la evolución de ese nodo (12) hasta que se encuentra listo para un registro. e) A continuación, se realizará una comprobación de que los nodos (12) se han conectado correctamente al sensor sísmico (11) y todo está listo. La prueba consistirá en iniciar un registro para visualizar la señal en el explorador web e ir recorriendo cada nodo (12) , empezando por el primero, y dando unos golpecitos al sensor sísmico (11) para que aparezca en la gráfica del interfaz del usuario. Si al dar los golpecitos no aparecieran dichos picos en la gráfica, indicaría que hay algún error. f) Una vez comprobados los nodos (12) , se detendrá el registro y se esperaran a que vuelvan a sincronizar todos los nodos (12) , realizando el envío de una serie de tramas y detectando el tiempo de envío. g) A partir de ese momento se iniciará el registro en el servidor (13) y se definirá la duración del registro, bien por tiempo en minutos o bien por número total de muestras a capturar. h) El registro se iniciará desde la interfaz de usuario. A partir de ese momento se empezarán a recibir las muestras y a visualizar la señal de cada nodo en la pantalla del interfaz de usuario. En el panel gráfico se mostrarán las últimas muestras recibidas. i) Una vez se ha finalizado el registro, el servidor (13) generará tres ficheros de datos: un primero con los valores absolutos de la señal, un segundo con los valores absolutos de la señal menos el valor medio, y un tercero con los valores de la señal expresados en voltios. j) A partir de este momento, ya se podrá acceder al sistema de archivos del servidor (13) mediante un programa de transferencia de archivos seguro (SCP, Secure Copy Protocol) . Como ejemplo, en la figura 5 se muestran las señales registradas (30) por los seis nodos (12) y el resultado del análisis de frecuencia-número de onda, que proporciona la curva de dispersión de las ondas Rayleigh (31) . Para la comunicación vía Wi-Fi, el sistema posee un mecanismo exclusivo basado en slots de tiempo de transmisión para que transmita cada nodo (12) sin que se produzca una colisión ya que el medio es compartido y los nodos (12) comienzan a muestrear a la misma vez. El mecanismo de retransmisión de tramas perdidas también está supeditado a los slots de tiempo de transmisión. El sistema también se caracteriza por un protocolo propio de sincronización entre todos los nodos (12) , y control de la desviación o deriva entre cada uno de ellos y el servidor (13) . Este aspecto es importante para el posterior correcto análisis de las señales registradas.
Publicaciones:
ES2959543 (26/02/2024) - A1 Solicitud de patente con informe sobre el estado de la técnica
Eventos:
En fecha 29/07/2022 se realizó Registro Instancia de Solicitud
En fecha 29/07/2022 se realizó Admisión a Trámite
En fecha 29/07/2022 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 01/08/2022 se realizó Superado examen de oficio
En fecha 18/05/2023 se realizó Realizado IET
En fecha 22/05/2023 se realizó 1109P_Comunicación Traslado del IET
En fecha 26/02/2024 se realizó Publicación Solicitud
En fecha 26/02/2024 se realizó Publicación Folleto Solicitud con IET (A1)
En fecha 23/04/2024 se realizó PETEX_Petición de examen sustantivo
Pagos:
16/06/2022 - Pago Tasas IET
+ ES-2959543_A11- Sistema de bajo ruido para la adquisición sincronizada e inalámbrica de señales de ruido ambiente en redes de sensores sísmicos, señales para la determinación de la curva de dispersión de las ondas Rayleigh, donde el sistema es del tipo formado por una serie de nodos (12) con sensores sísmicos (11) de toma de muestras y conectados a un servidor (3) central, caracterizado por que cada nodo (12) : comprende un microcontrolador (25) ; está conectado de forma inalámbrica con el servidor (13) , disponiendo de ventanas deslizantes para el envío de las muestras; comprende un circuito de acondicionamiento (27) de la señal formado por: un módulo de conversión de tensión (18) ; un amplificador de instrumentación (17) que convierte la señal diferencial de cada sensor sísmico (11) en una señal amplificada y referenciada a masa, de forma que la señal de referencia está fijada a la mitad de la máxima tensión de alimentación aportada por el módulo de conversión de tensión (18) ; y un filtro antisolapamiento (20) paso-bajo, con frecuencia de corte controlada por una señal de reloj emitida por el microcontrolador (25) . 2- Sistema de bajo ruido para la adquisición sincronizada e inalámbrica de señales de ruido ambiente en redes de sensores sísmicos, según la reivindicación 1, caracterizado por que el amplificador de instrumentación (17) tiene una ganancia de entre 1000 y 10.000 mediante un amplificador operacional de bajo ruido (19) . 3- Sistema de bajo ruido para la adquisición sincronizada e inalámbrica de señales de ruido ambiente en redes de sensores sísmicos, según la reivindicación 1, caracterizado por que comprende un protocolo de sincronización entre todos los nodos (12) y de control de la desviación o deriva entre cada uno de ellos y el servidor (13) .
Los productos y servicios protegidos por este registro son:
G01V 1/18 - G01V 1/24
Descripciones:
+ ES-2959543_A1 SISTEMA DE BAJO RUIDO PARA LA ADQUISICIÓN SINCRONIZADA E INALÁMBRICA DE SEÑALES DE RUIDO AMBIENTE EN REDES DE SENSORES SÍSMICOS Campo de la invención La presente invención se enmarca en el sector de la exploración geofísica, y más concretamente en el campo de la microzonación sísmica mediante medidas simultáneas de varios sensores sísmicos (matriz de sensores) . El registro sincronizado y simultáneo de las vibraciones ambientales (también conocido como ruido ambiente o ruido sísmico) por parte de una matriz de sensores, permite posteriormente, mediante el correspondiente análisis, la obtención de la curva de dispersión de las ondas superficiales o Rayleigh, y por tanto, la caracterización del tipo de suelo. Antecedentes de la invención Estudios recientes en todo el mundo han demostrado la importancia de la geología local en los desastres sísmicos y sus consecuencias. El movimiento del suelo puede amplificarse drásticamente, dependiendo de las características particulares del subsuelo, aumentando los efectos sísmicos. Por lo tanto, la caracterización del suelo se convierte en un tema crucial en los estudios de riesgo sísmico, particularmente en áreas urbanas ubicadas sobre sedimentos blandos. Esta caracterización se puede realizar a través de diferentes métodos, básicamente clasificados en técnicas geotécnicas y geofísicas. Dentro del segundo grupo, los métodos de sísmica pasiva basados en mediciones de ruido sísmico se han vuelto muy populares en las últimas décadas, ya que constituyen una herramienta no invasiva y de menor coste, especialmente adecuada para áreas urbanas. El ruido sísmico ambiental corresponde a las vibraciones en la superficie terrestre debidas a diferentes causas naturales y artificiales. Estas vibraciones son imperceptibles para el ser humano, pero no para los sensores sísmicos. Por lo que su registro y análisis brinda información valiosa sobre las propiedades del medio que atraviesa, esto es, las características del suelo. El cálculo de los perfiles de velocidad de las ondas de cizalla u ondas S proporciona nformación valiosa para predecir la respuesta del suelo en caso de un terremoto. Una de las técnicas más comunes utilizadas para la caracterización del suelo es el método de relación espectral horizontal a vertical (H/V) . En este caso, se requiere un solo sensor de tres componentes. La relación entre el componente vertical y el promedio de los dos componentes horizontales proporciona información sobre la frecuencia de resonancia del suelo en estudio. Si alguna de las frecuencias de las ondas sísmicas coincide con la frecuencia de resonancia del suelo, entonces, su amplitud se verá drásticamente amplificada, aumentando dramáticamente los efectos del sismo asociado. Las técnicas de matriz basadas en mediciones de ruido sísmico constituyen también una herramienta notable para la caracterización del suelo. Estas técnicas requieren varios sensores verticales registrando simultáneamente. Después de eso, se pueden aplicar diferentes técnicas para el análisis de los datos. Tres de los métodos más utilizados son la técnica de autocorrelación espacial (SPAC) , el método de autocorrelación espacial extendida (ESAC) y el método de frecuencia-número de onda (F-K) . La aplicación de cualquiera de estos métodos permite obtener la velocidad de propagación de las ondas a través del medio en función de la frecuencia, lo que se conoce como curvas de dispersión. Una vez que se obtiene la curva de dispersión, mediante un proceso de inversión se puede estimar el perfil de velocidad de la onda S correspondiente, y caracterizar el tipo de suelo, lo cual es de gran importancia para conocer como un terremoto puede afectar en mayor o menor medida a la zona bajo estudio. La presente invención se enmarca en este segundo tipo de medidas, en matriz, donde se requiere el registro simultáneo de varios sensores sísmicos y donde la sincronización entre todas las medidas es crucial para el posterior análisis de las señales registradas. Desde el punto de vista de su implementación y de los recursos necesarios, todas estas técnicas requieren de varios sensores y un digitalizador multicanal para registrar varias señales simultáneamente. La adquisición de estos digitalizadores, junto con los sensores correspondientes supone un importante desembolso económico que no está al alcance de todos los grupos de investigación. Por ello, los avances en las investigaciones relacionadas con la caracterización del subsuelo o la amenaza sísmica suelen verse limitados por el excesivo coste de la instrumentación necesaria. En el caso de medidas de ruido sísmico o ruido ambiente, las vibraciones que se desea detectar presentan una amplitud muy pequeña, alrededor de 10-10 a 10-2 m/s, y un ancho de banda entre 0, 001 y 50 Hz. El sensor sísmico, de forma general, actúa como un transductor de velocidad, desplazamiento o aceleración a la señal eléctrica, aunque para el caso de aplicación de la invención, suelen ser sensores de velocidad. Los instrumentos típicos utilizados para ruido sísmico son sensores de período corto, que presentan un comportamiento paso alto con frecuencia de corte entre 0, 2 y 4, 5 Hz, o sensores de banda ancha, que presentan una respuesta plana de aproximadamente 0, 01 a 50 Hz. La sensibilidad de estos sensores está comprendida entre 100 y 400 V/m/s, para los sensores de periodo corto, o entre 800 y 2000 V/m/s para los de banda ancha. Comercialmente, existen equipos de adquisición de señales sísmicas de uno o tres componentes que se pueden registrar como estaciones autónomas, grabar los datos de forma local en cada equipo y/o transmitirlos mediante cable o de forma inalámbrica a un equipo central. Sin embargo, esto requiere de varios conjuntos sensor-sistema de adquisición, lo cual aún encarece más el coste. Y, sobre todo, no es un sistema optimizado y preparado para medidas en red o matriz de sensores sísmicos. Sí que existen otros equipos comerciales que disponen de un sistema de adquisición multicanal al que se le pueden conectar varios sensores y cuyo objeto principal es la medida simultánea en red de varios geófonos o sensores sísmicos. La mayoría de estos equipos son cableados, lo que dificulta su implementación en ciertos entornos urbanos, donde la disposición de los geófonos debe adaptarse a los espacios libres disponibles y sus geometrías. Todo ello, junto con el creciente desarrollo de microcontroladores y plataformas electrónicas de código abierto, ha llevado al desarrollo de registradores sísmicos ad-hoc por parte de algunos investigadores. Muchos de ellos están enfocados a medidas de un sensor vertical, medidas de tres componentes para posterior análisis H/V, exploración geofísica, monitorización sísmica en edificios, etc. En el caso concreto de medidas en matriz, la adquisición de las señales de cada sensor debe ealizarse de forma sincronizada y coordinada, actuando como un conjunto en sí y no cada una de forma individual. A continuación, se citan algunos de los trabajos desarrollados para la toma de medidas en matriz o red de sensores: a) Picozzi et al (https://doi.org/10.3390/s100403280) han desarrollado un sistema inalámbrico para medidas en matriz de ruido sísmico. En este caso, la señal del sensor sísmico va directamente conectada al conversor analógico-digital, el cual incorpora un filtro antisolapamiento pero ningún otro tipo de acondicionamiento de la señal. La sincronización del sistema, así como la estabilidad temporal, están asociadas a la precisión del GPS. b) En el trabajo de Soler-Llorens et al. (https://doi.org/10.3390/s19194087) se establece una red de sensores (o nodos) inalámbrica mediante el protocolo de comunicación Zigbee para la gestión de la adquisición de las señales sísmicas y la sincronización entre las medidas de cada sensor. Los datos se recogen localmente en cada nodo, por lo que el principal inconveniente es que hay que quitar las tarjetas de memoria de cada nodo y acceder a los archivos uno por uno. Además, este sistema no permite la visualización de las señales en tiempo real, lo que impide detectar en el campo los problemas asociados al mal funcionamiento de un geófono o errores en las conexiones. c) En el trabajo de Yin Zhiyuan (https://doi.org/10.3390/s20041018) se presenta un sistema de varias matrices o redes de sensores que utilizan conexión WiFi para la comunicación entre sensores y tecnología LTE para la comunicación entre los diferentes grupos o matrices. En este caso, el objeto del trabajo no es estrictamente en el campo de la microzonación sísmica. La sincronización del sistema y la estabilidad temporal están asociadas a la precisión de la señal de GPS. Estos sistemas presentan ciertos inconvenientes: • Las señales sísmicas están conectadas directamente al conversor analógico-digital o a un circuito de adquisición de relativamente baja relación señal-ruido (SNR) . Esto los hace aptos para señales de relativamente alta amplitud, pero no tanto para ruido sísmico. • La sincronización entre las estaciones está asociada a la precisión de la señal de GPS. • No se tiene en cuenta la posible deriva temporal debida al reloj interno de los microprocesadores. Para medidas de varias horas, esta deriva puede introducir rrores notables en el análisis posterior de las señales. • En algunos casos, la grabación de los datos se realiza de forma local en cada uno de los nodos de la red de sensores. • En algunos sistemas no es posible la visualización de datos en tiempo real, lo que impide la detección de errores en el campo, con el coste económico que conlleva tener que desplazarse de nuevo y repetir la medida. Para ello, la presente invención se centra en una propuesta de un sistema integral, viable económica y técnicamente, basado en la adquisición mediante una red de sensores sísmicos de ruido ambiente, y que permite dar solución a los problemas técnicos comentados anteriormente. Explicación de la invención La invención es un sistema de bajo ruido para la adquisición sincronizada e inalámbrica de señales de ruido ambiente en redes de sensores sísmicos según la reivindicación independiente. Sus variantes se definen en las demás reivindicaciones y se describen en el resto de la memoria. El sistema de la invención permite registrar de forma inalámbrica en un solo servidor todas las medidas obtenidas desde los diferentes geófonos o sensores sísmicos. El análisis directo de estas señales permite obtener la curva de dispersión de las ondas Rayleigh (velocidad de las ondas en función de la frecuencia) y a partir de ahí, la estimación del perfil de velocidad de las ondas de cizalla en el área bajo estudio (caracterización del tipo de suelo) . Para la consecución del objeto de la invención se ha desarrollado un sistema compuesto por una serie de nodos conectados a un geófono o sensor sísmico que miden al menos la componente vertical del movimiento del suelo y a un servidor central que recogerá las muestras de cada nodo vía Wi-Fi y las irá mostrando y guardando en ficheros localmente. La disposición de los nodos normalmente será alrededor del servidor, con una apertura que depende de la profundidad de los sedimentos que se vayan a analizar. El área que se puede medir con el sistema desarrollado es hasta unos 250 metros de diámetro en campo abierto y libre de interferencias. El número máximo de nodos permitidos en el sistema es de 10 y se componen de un circuito daptador diseñado específicamente para el geófono o sensor sísmico, un conversor analógico digital (ADC) de 8 canales de 24 bits y un microcontrolador CC3200 que se encarga de gestionar la toma de muestras, las comunicaciones y la sincronización con el servidor. El servidor preferido está compuesto por una Raspberr y Pi modelo 4B al cual se le conecta una tarjeta W i-Fi-USB de alta potencia. Al servidor se le conectará un portátil para poder acceder a la interfaz de usuario por medio de un navegador web. Se ha diseñado una interfaz donde se puede interactuar con el sistema, iniciando y finalizando los registros, sincronizando los nodos, y además se visualiza las señales de los nodos en tiempo real. Alguna de las características diferentes que aporta la invención desarrollada son: - Circuito de acondicionamiento de la señal de bajo ruido en cada nodo. Permite adaptar la baja amplitud del ruido sísmico a una señal de voltios adaptada al rango dinámico del conversor analógico digital. - Comunicación entre nodos y servidor mediante un protocolo propio exclusivo a través de UDP. Esto ha implicado la invención e implementación de un sistema propio que controle el flujo ordenado de los paquetes que contienen las muestras y del control de errores y recuperación. - Creación de una red Wi-Fi para la comunicación entre nodos y servidor. El hecho de que los nodos estén en la misma red Wi-Fi ha llevado a implementar un mecanismo exclusivo basado en slots de tiempo de transmisión para que transmita cada nodo sin que se produzca una colisión ya que el medio es compartido y los nodos comienzan a muestrear a la misma vez. El mecanismo de retransmisión de tramas perdidas también está supeditado a los slots de tiempo de transmisión. - Protocolo propio de sincronización entre todos los nodos, y control de la desviación o deriva entre cada uno de ellos y el servidor. Este aspecto es fundamental para el posterior correcto análisis de las señales registradas. - Rápido y fácil despliegue de todo el sistema para realizar una serie de medidas, ahorrando en tiempo ya que no se tienen que desplegar ningún tipo de cableado hasta los nodos. - Visualización de cada una de las señales muestreadas por cada nodo en tiempo real. De esta manera se pueden detectar si se está midiendo correctamente o hay algún problema con algún nodo. - Centralización de las muestras de los sensores y disponibilidad del registro en formato estándar nada más finalizar el registro. En base a la señal captada y las capacidades de los sensores sísmicos, la señal de tensión proporcionada por el geófono o el sensor sísmico, en el caso de medidas de ruido ambiente, es de muy baja amplitud y su conexión directa al conversor analógico digital solo proporciona una señal de muy baja resolución y que no serviría para los propósitos de caracterización del tipo del suelo. Por ese motivo es necesario un circuito de acondicionamiento que transforme la señal registrada por el sensor sísmico a unos niveles de tensión y a un rango de frecuencias que se ajusten al rango dinámico del conversor analógico digital utilizado. No obstante, dada la baja amplitud de las señales registradas, la simple amplificación y filtrado de la señal puede llegar a no ser suficiente. Es importante que el ruido interno del circuito diseñado esté por debajo de los mínimos niveles de ruido sísmico que se puedan registrar. De otro modo, la señal de interés quedaría enmascarada por el ruido del propio circuito. En la presente invención se ha desarrollado un circuito de acondicionamiento de la señal de bajo ruido interno, adaptado a los objetivos de la propia invención. El circuito de acondicionamiento se compone básicamente de los siguientes módulos: 1. Módulo de conversión de tensión (por ejemplo el TC7662A) . Proporciona la tensión de alimentación necesaria para cada uno de los integrados del circuito. Es capaz de proporcionar una tensión simétrica. En este caso los integrados trabajan con tensiones de 5V y +-5V-. 2. Amplificador de instrumentación. Convierte la señal diferencial del geófono en una señal amplificada y referenciada a masa. La ganancia del sistema se controla mediante una resistencia externa. Dada la baja amplitud del ruido sísmico, la resistencia seleccionada es tal que sea capaz de proporcionar una ganancia de 1000 o 10000. La elección de la ganancia depende del tipo de emplazamiento seleccionado. En sitios relativamente tranquilos, la ganancia de 10000 puede ser la más apropiada. En lugares urbanos, con un mayor nivel de ruido ambiente, se recomienda una ganancia de 1000, pues la ganancia de 10000 puede llegar en ocasiones a saturar la señal. La ganancia es seleccionable por una resistencia que preferiblemente se selecciona de 5Q para conseguir el máximo de ganancia y así conseguir que la señal sísmica se ajuste perfectamente al rango dinámico del conversor de 23 bits. Como se ha comentado anteriormente, la amplitud del ruido interno del circuito en general y de los integrados en particular, es crucial para el correcto funcionamiento del sistema. En este caso, el amplificador de instrumentación se caracteriza por un bajo ruido del orden de 0.2uVpp. La señal de referencia, conectada al terminal 5, se fija a la mitad de la máxima tensión de alimentación, esto es a 2.5V. Para ello se utiliza un amplificador operacional de bajo ruido que actúa como seguidor de tensión con una muy baja impedancia de salida. 3. Filtro antisolapamiento. Se trata de un filtro paso-bajo, de orden 8, de capacidades conmutadas cuya frecuencia de corte se controla mediante una señal de reloj externa. La señal cuadrada de reloj es proporcionada por el propio microcontrolador del nodo y de este modo, vía software, se escoge la frecuencia de corte deseada. En el sistema de la invención, la frecuencia de muestreo es normalmente de 100Hz y la frecuencia de corte del filtro se ha seleccionado en 15Hz. Esta frecuencia de corte asegura una atenuación suficiente a la frecuencia de Nyquist (evitando posibles solapamientos) y a la vez incluye el rango de frecuencias de interés en los estudios de caracterización del terreno. La comunicación entre el conversor analógico digital y el microcontrolador se realiza mediante el bus de comunicación SPI. A través de la interfaz SPI, los datos digitalizados son enviados al microcontrolador para poder ser guardados y transmitidos al servidor. Es importante destacar que el circuito de acondicionamiento y el conversor analógico digital se alimentan con su propia fuente de alimentación o batería, independiente de la utilizada para alimentar al microcontrolador. Esto evita posibles interferencias que pudieran propagarse entre los dos sistemas a través de las conexiones de alimentación. Como microcontrolador preferido se escoge la plataforma TI LaunchPad CC3200 por su bajo consumo y porque en ella se integra la interfaz Wi-Fi y sus librerías. Los nodos realizan la toma de muestras y su conversión, conectan con el servidor por una red inalámbrica, calculando el tiempo de retardo y de deriva. Los nodos configuran los temporizadores para ser sincronizado con el servidor NTP mediante un temporizador Heartbeat. En paralelo, reciben las tramas y envían paquetes al servidor por UDP (protocolo de datagramas de usuario) y los acuses de recibo (ACK) . Las muestras se toman con un periodo fijado, por ejemplo de 10 ms. Cada momento lee el valor del tiempo y de los canales, y agrupa las muestras en paquetes, por ejemplo de 100 muestras que corresponden a un segundo, para enviarlas al servidor. La información del tiempo permite asegurar que la frecuencia de muestreo se mantiene estable, dando tiempo para ejecutar todos los pasos entre cada par de muestras. Es importante asegurar la sincronización de los nodos, entre ellos y con el servidor, para que los momentos de cada muestreo sean idénticos y puedan extraerse los datos buscados. Para ello cada nodo se conecta al servidor por una trama de tipo Helio y le solicita el tiempo de la red (NTP) . A partir de ahí se sincroniza en dos fases. Una primera mediante intercambio de tramas entre servidor y nodo, en el cuál ambos guardan el tiempo de cada trama en cada punto (Sti, Nt2, Nía, St4...) . A partir de esos tiempos se calculará el desfase y la deriva entre ambos. La fórmula utilizada, para la secuencia de cuarenta tramas, es: T di + d2 + di Donde Ti es el tiempo total que tarda una única secuencia de tramas de sincronización y sus respuestas, d i es el tiempo que tarda en viajar una trama desde el servidor hasta el nodo, d2 es el tiempo de procesamiento invertido en el nodo hasta que envía una respuesta, y d3 es el tiempo que se tarda en transmitir la respuesta al nodo. TTi es el tiempo invertido en la transmisión de ida y vuelta, es decir d i y d3 , sin contar con el tiempo de procesamiento, STi es la estampa de tiempo (TimeStamp) del servidor en el instante i, NTi es el TimeStamp del nodo. El drifti es la diferencia de tiempos entre server y nodo de la secuencia i. Estableceremos como el tiempo de transmisión total (TTTota) al valor mínimo obtenido en la secuencia de 40 tramas, y la diferencia total (DriftTota) a la media de los valores de diferencia dados en la secuencia de 40 tramas. En la segunda fase se utilizarán las tramas tipo Helio. En ellas cada nodo guardará su tiempo usto antes de enviar el Helio. Para que no se produzcan colisiones de las tramas en la Wi-Fi, ya que es un medio compartido, cada Nodo envía su trama Helio con un desfase respecto de las anteriores (1 segundo, por ejemplo) y de forma secuencial varias veces. El servidor irá guardando los dos instantes de tiempo del Helio: el registrado por el nodo y cuando el servidor lo ha recibido. Cuando tenga los instantes de tiempo de varias tramas Helio de cada nodo, el servidor calculará el desfase de tiempo que hay para cada trama Hello de la siguiente manera (para 10 tramas) : Donde driftHi es la diferencia de tiempos entre el servidor y el nodo de una trama obtenida del envío de una trama, y DriftHTotal es la media de las últimas 10 tramas recibidas. El desfase total del nodo (DriftHTotai) será la media de los valores. A continuación, el servidor enviará una indicación al nodo para que adelante o atrase su tiempo X milisegundos si el desfase total es mayor de 5ms. Se ha establecido el umbral de 5ms porque tiene que ser menor que el periodo de muestreo (10ms) , de esta manera nos aseguramos de que la diferencia de tiempos no llegue a ser de 1 muestra. El buffer encargado de almacenar los tiempos de las tramas Hello siempre guardará el tiempo de las últimas, excepto cuando se realice un ajuste del tiempo, en donde se reseteará a cero y habrá que esperar a recibir otras tramas. Finalizada la fase 2, los nodos ya estarán sincronizados y se mantendrán con una diferencia de 5ms como máximo. En este momento el sistema ya estará preparado para realizar una medida. Durante el registro, los nodos tenderán a desfasarse entre ellos en función de la duración del registro, cuanto más largo más desviación. Para evitar esta situación se ha desarrollado un método de sincronización. En la trama donde se envía un alto número de muestras, se guarda el tiempo del nodo justo antes de enviarse la trama, que será con una frecuencia conocida. El servidor, a la vez que recibe las muestras, recibe el tiempo del nodo volverá a aplicar el ecanismo de la fase 2, es decir, almacenará en el buffer los valores de los últimos tiempos de envío y recepción, calculará la media del desfase de tiempo y si es mayor de 5ms enviará una orden para que se reajuste el nodo. Otra parte importante es el protocolo desarrollado para la transmisión de las muestras a través de UDP y que garantiza la entrega de las muestras de manera secuencial y sin errores. En el caso de producirse pérdidas de paquetes de muestras, el sistema es capaz de reenviarlas soportando cortes de transmisión ya que los nodos poseen un buffer capaz de almacenarlas. Se han definido los siguientes tipos de tramas con sus correspondientes campos para la realización preferida: Tabla 4. Tipos de mensajes Los mensajes Tipo 1 (SO, Sampling Order) se utilizan para enviar las órdenes de START/STOP de los registros de acuerdo con el valor del campo Código: • Código = 1: Indica que el Nodo comenzará a muestrear inmediatamente después de recibir esta trama y enviará al Servidor las muestras. • Código = 2: Indica que el Nodo finalizará el muestreo inmediatamente después de recibir esta trama y enviará las muestras que hayan quedado pendientes. • Código = 3: Indica que el Nodo comenzará a muestrear inmediatamente después de recibir esta trama y no enviará al Servidor ninguna muestra. • Código = 5: Indica que el Nodo comenzará a muestrear en el siguiente segundo después de recibir esta trama y enviará al Servidor las muestras. Los mensajes Tipo 2 (SR, Samples Reply) están relacionados con el envío y recepción de las muestras. • Código = 1: contiene el valor de 100 instantes de muestras. Cada instante de muestras está formado por una marca que se corresponde con el valor de los milisegundos del instante de tiempo en que se tomaron las muestras (2 Bytes) , el valor del canal 1 del ADC que se corresponde con el eje X (3 Bytes) , el valor del canal 2 del ADC correspondiente al eje Y (3 Bytes) , y por último el valor del canal 3 del ADC correspondiente al eje Z (3 Bytes) . Aunque la utilización generalizada del sistema de invención es con geófonos verticales, con una sola componente, el sistema está preparado para trabajar también con sensores sísmicos triaxiales, lo que proporcionaría el movimiento del suelo en la componente vertical (Z) así como en las dos componentes horizontales (X e Y) . • Código = 2: Confirma al Nodo de la correcta recepción de las muestras hasta el número de secuencia indicado. El mensaje Tipo 5 se corresponde a la trama Helio donde en el campo UTC System Time se guarda el valor del tiempo UTC en formato segundos, y en el campo Millisecs System Time se guarda el valor de los milisegundos. Los mensajes Tipo 6 (ST, Set Timer) están relacionados con el ajuste del tiempo y el reloj de los nodos. • Código = 1: configura y establece el valor del contador del Timer que controla el tiempo e muestreo que es de 10ms. Con este campo controlamos la deriva del reloj interno del microcontrolador CC3200. • Código = 2: el Nodo confirma que ha configurado el nuevo valor en el registro del Timer. • Código = 5: valor en milisegundos del retraso/adelanto que tiene que aplicar en el RTC interno del microcontrolador. • Código = 6: el Nodo confirma que ha aplicado el retraso/adelanto en el valor del RTC. Los mensajes Tipo 7 (TS, TimeStamp) se utilizan para marcar el tiempo tanto del comienzo del muestreo (tiempo cuando se va a producir la primera muestra del registro) , como la finalización de la última muestra del registro en cada Nodo. Estas tramas sirven como marcas calculándose con exactitud el tiempo invertido en el registro y si falta ajustar el reloj de algún nodo. • Código = 1: TimeStamp del inicio del registro al producirse la primera muestra • Código = 2: indica al Servidor que el Nodo ha llegado a la muestra marcada para resincronizar con el método Stop&Go. • Código = 3: TimeStamp del final del registro al producirse la última muestra Los mensajes Tipo 9 (SC, Sync CLK) se utilizan en la fase 1 de la sincronización para el cálculo del desfase y la deriva. Se utiliza un proceso de tres vías. • Código = 1: el Servidor inicia la trama marcando su tiempo. • Código = 2: el Nodo devuelve la trama marcando su tiempo en el que la recibió del Servidor y también marcando el tiempo cuando va a enviarla de vuelta al Servidor. • Código = 3: El Servidor devuelve al Nodo la trama completa con los cuatro tiempos para que pueda calcular el desfase y la deriva. Para garantizar la recepción de las muestras de forma ordenada se ha implementado un mecanismo de ventana deslizante aplicado a slots de tiempo para la retransmisión. Para evitar la colisión de las tramas que contienen las muestras, se ha definido slots de transmisión para cada nodo. Para conseguir esto, la primera trama de cada nodo comprenderá un número diferente de muestras. Así se genera directamente una separación en los envíos siguientes, todos iguales en número de muestras. Por ejemplo, para diez nodos, el primer envío del primer nodo será de 10 muestras. El segundo enviará 20... de forma que cada nodo termina de preparar su trama y la envía en momentos diferentes. A partir de ese omento todos enviarán grupos iguales de muestras. Se ha desarrollado un mecanismo de acuse de recibo cada número de tramas. El servidor y el nodo irán almacenando las últimas tramas recibidas/enviadas. Si el servidor si recibe las tramas y detecta que las muestras son consecutivas, observando el tiempo o el número de secuencia, entonces enviará una trama de acuse de recibo ara indicarle al nodo de que las ha recibido correctamente. En este instante el servidor y el nodo vaciarán su buffer a la espera de las siguientes. Si en el transcurso de la recepción de dichas tramas se pierde alguna, el servidor enviará un acuse de recibo incluyendo la última muestra correcta recibida. El nodo calculará cuántas tramas debe reenviar y cuando le toque su ventana de transmisión enviará todas las tramas seguidas que pueda durante el tiempo de ventana. Si quedaran tramas pendientes de enviar, el nodo se esperará al siguiente slot para transmitirlas, así hasta que las haya transmitido todas. Gracias a la implementación de este método de recuperación de tramas perdidas se ha podido incrementar el área a medir considerablemente, pasando de 20-30 metros de diámetro a una distancia sobre los 250 metros de diámetro. Otras realizaciones se describirán más adelante. Se ha de tener en cuenta que, a lo largo de la descripción y las reivindicaciones, el término "comprende" y sus variantes no pretenden excluir otras características técnicas o elementos adicionales. Breve descripción de las figuras Para complementar la descripción que se está realizando y con objeto de ayudar a una mejor comprensión de las características de la invención, se acompaña como parte integrante de dicha descripción, un juego de dibujos en donde con carácter ilustrativo y no limitativo, se ha representado lo siguiente: En la figura 1 se muestra un dibujo de la caja externa de la invención, indicando cada una de las conexiones, botones, etc. En la figura 2 se muestra un diagrama de bloques con los componentes que integran cada no de los nodos. En la figura 3 se muestra esquemáticamente el diagrama de bloques del circuito de acondicionamiento. En la figura 4 se muestra a modo de ejemplo una posible distribución de los geófonos y nodos, donde el servidor se encuentra en el centro y los nodos distribuidos a lo largo de una circunferencia exterior. En la figura 5 se muestra el resultado obtenido para el caso de ejemplo. Exposición detallada de unos modos de realización Se describe a continuación una serie de formas de realizar la invención, como ejemplos descriptivos pero que no buscan limitar la invención. La realización de la invención que se describe con apoyo de las figuras 1 a 4 consta de varios nodos (12) conectados a sendos geófonos o sensores sísmicos (11) . Todos los nodos (12) se conectan de forma inalámbrica a un servidor (13) , en cual se encarga del control de las comunicaciones y del registro de todos los datos. Para la configuración de la adquisición y visualización en tiempo real de las señales registradas, se conecta el servidor (13) con un ordenador portátil (15) u otro sistema de computación mediante cable (14) Ethernet y se opera a través de un explorador web. Cada uno de los nodos (12) de la invención realizada se compone internamente de los elementos que se muestran en las figuras 2 y 3. Los nodos (12) se pueden configurar mediante un puente para muestrear sensores sísmicos (11) de un solo canal o sensores de tres componentes (tres canales) . Por lo tanto, la matriz que se implementa en el campo puede ser híbrida. El servidor web se configura solo y muestra el gráfico de un canal o de tres canales para cada sensor sísmico (11) . Cada nodo del sistema posee un circuito de acondicionamiento (27) formado internamente por los siguientes bloques: • Módulo de conversión de tensión (18) . Proporciona la tensión de alimentación ecesaria para cada uno de los demás elementos del circuito. Es capaz de proporcionar una tensión simétrica. En este caso los integrados trabajan con tensiones de 5V y ±5V. • Amplificador de instrumentación (17) . Convierte la señal diferencial de cada sensor sísmico (11) en una señal amplificada y referenciada a masa. La ganancia del amplificador de instrumentación (17) se controla mediante una resistencia externa, la cual se puede configurar para proporcionar ganancias crecientes, por ejemplo de 1000 o 10000, según sea necesario. La señal de referencia de este amplificador de instrumentación (17) se fija a la mitad de la máxima tensión de alimentación, esto es a 2, 5V. • Amplificador operacional de bajo ruido (19) que actúa como seguidor de tensión con una muy baja impedancia. • Filtro antisolapamiento (20) . Se trata de un filtro paso-bajo, de orden ocho, de capacidades conmutadas cuya frecuencia de corte se controla mediante una señal de reloj externa. La señal cuadrada de reloj es proporcionada por un microcontrolador (25) y de este modo, vía software, se escoge la frecuencia de corte deseada. En el sistema de esta realización, la frecuencia de muestreo es de 100 Hz y la frecuencia de corte del filtro se ha seleccionado en 15 Hz. Esta frecuencia de corte asegura una atenuación suficiente a la frecuencia de Nyquist (evitando posibles solapamientos) y a la vez incluye el rango de frecuencias de interés en los estudios de caracterización del terreno, siendo entre 0-50Hz. Para la realización de registros de ruido sísmico es requisito indispensable tener la máxima ganancia posible con el menor ruido interno posible para así detectar con mayor relación señal-ruido la señal sísmica. Este requisito nos lleva a elegir componentes de muy bajo ruido y bajo consumo como es el caso del INA128 como amplificador de instrumentación (17) y OPA177 como amplificador operacional (19) que se ajustan a nuestros requerimientos. Los requisitos necesarios en la realización preferida son: - Módulo de conversión de tensión (18) : o Rango de operación entre 3V-18V o Corriente de salida de 40mA o Baja impedancia, 40 Q o Potencia de disipación superior a 700mW - Amplificador de instrumentación (17) : o Rango de operación entre 3V-18V o Bajo voltaje offset, máximo 50^V o Baja deriva, máximo 0, 5^V/°C o Corriente Bias de entrada 5nA o Corriente menor de 750^A - Amplificador operacional (19) : o Rango de operación entre 3V-18V o Bajo voltaje offset, máximo 25^V o Baja deriva, máximo 0, 3^V/°C o Corriente típica máxima de 1.5mA - Filtro antisolapamiento (20) : o Rango de operación entre 3V-16V o Frecuencia de corte hasta 100Hz o Troughput minimo 72dB La señal de salida del circuito de acondicionamiento (27) , amplificada y filtrada, se conecta directamente a un conversor analógico digital (23) . Por ejemplo, el conversor ADS1256, que permite digitalizar hasta un máximo de 8 canales a 24 bits (23 bits efectivos) . En el sistema de la realización se utiliza un canal, correspondiente a la componente vertical del sensor sísmico (11) , pero el sistema puede digitalizar, si fuera necesario, los tres canales correspondientes a un sensor triaxial. La señal digitalizada se envía mediante el bus SPI (24) al microcontrolador (25) , en este caso CC3200, donde la señal no sólo se guarda temporalmente de forma local, sino que también se envía vía Wi-Fi al servidor (13) . Para alimentar el sistema se utilizan dos baterías externas (21, 22) . La primera batería (21) se encarga de suministrar la tensión y corriente necesarias para el circuito de acondicionamiento (27) y para el conversor analógico digital (23) . La segunda batería (22) se encarga de alimentar el microcontrolador (25) . Ambas baterías (21, 22) son de idénticas características y en la realización se ha optado por baterías de 5V, 1A con capacidad de 4000mAh. De ese modo, al alimentarse de forma independiente, se evitan posibles interferencias ante picos de demanda de corriente que podrían producirse en la transmisión vía Wi-Fi por parte del microcontrolador (25) . Los cables (26) a través de los cuales se proporciona la tensión continua se muestran mediante línea discontinua en las figuras 2 y 3. La selección de los diferentes elementos del circuito de acondicionamiento (27) se ha realizado teniendo siempre en cuenta el nivel de ruido interno de los mismos, a fin de lograr un muy bajo ruido. La amplitud del ruido interno del circuito de acondicionamiento (27) en general y de los integrados (amplificador de instrumentación (17) , amplificador operacional de bajo ruido (19) y filtro antisolapamiento (20) en particular es crucial para el correcto uncionamiento del sistema. En el caso del módulo de conversión de tensión (18) , no solo se ha tenido en cuenta el nivel de ruido interno, sino también que sea capaz de proporcionar la corriente máxima necesaria para el correcto funcionamiento del resto de los integrados citados. La corriente típica calculada para los tres chips según los datasheets es de 16 mA, siendo 0, 7 mA del amplificador de instrumentación (17) , 1, 3 mA del amplificador operacional de bajo ruido (19) , 14 mA del filtro antisolapamiento (20) , y la corriente máxima es de 30, 75 mA. El módulo de conversión de tensión (18) es capaz de proporcionar un total de 40mA por lo que tenemos más de un 100% de corriente disponible si tenemos en cuenta el consumo normal, y de un 30% superior si tenemos en cuenta el consumo máximo. En la figura 1 se muestra el aspecto externo de cada uno de los nodos (12) , apreciándose el exterior de la carcasa o caja (9) . Esta caja (9) tiene ranuras (1, 4) para introducir las baterías (21, 22) en la caja. Estas ranuras (1, 4) permiten sustituir las baterías (21, 22) desde el exterior de la caja. Posee igualmente un conector (5) preparado para recibir un cable adaptador (16) por medio de un cabezal (28) . El conector (5) es generalmente macho, del tipo 3-Pole MiniPL SPEC comercializado por Pak, para exteriores. La caja (9) comprende una serie de pilotos (2, 8) , LED, para indicar la conexión correcta de las baterías (21, 22) y cualquier otra indicación necesaria. También comprende un botón de reset (3) del nodo (12) y un botón de conexión (6) que envía una trama "hello" al servidor (13) . Otros botones (7) tienen funciones menos relevantes o futuras. La caja (9) posee una antena (10) , por ejemplo para WiFi que facilita la transmisión inalámbrica y permite alcanzar mayores distancias de comunicación. Los pasos para el manejo del sistema son los siguientes: a) En el área seleccionada a medir se desplegarán e instalarán los sensores sísmicos (11) , identificándolos con un número y tomando nota de las posiciones relativas entre cada uno de ellos, Como ejemplo, en la figura 4 se muestra una disposición circular con el servidor (13) y el ordenador portátil (15) en el centro, y seis sensores sísmicos (11) con sus respectivos nodos (12) distribuidos uniformemente a lo largo de una circunferencia de radio igual a 20 metros. b) Una vez insertados los sensores sísmicos (11) en el suelo y conectados a sus correspondientes nodos (12) , se encenderá el servidor (13) y se irá encendiendo cada nodo (12) y comprobando en los pilotos del nodo (8) que se conecta a la red Wi-Fi del servidor (13) . c) Una vez se haya iniciado el nodo (12) , aparecerá en la interfaz web el indicador del correspondiente nodo (12) , indicando que tiene comunicación con el nodo (12) . d) Tras establecer comunicación un nodo (12) , el servidor (13) iniciará el proceso de sincronización con cada nodo (12) , empezando por el primero. Los pilotos del nodo (8) irán indicando la evolución de ese nodo (12) hasta que se encuentra listo para un registro. e) A continuación, se realizará una comprobación de que los nodos (12) se han conectado correctamente al sensor sísmico (11) y todo está listo. La prueba consistirá en iniciar un registro para visualizar la señal en el explorador web e ir recorriendo cada nodo (12) , empezando por el primero, y dando unos golpecitos al sensor sísmico (11) para que aparezca en la gráfica del interfaz del usuario. Si al dar los golpecitos no aparecieran dichos picos en la gráfica, indicaría que hay algún error. f) Una vez comprobados los nodos (12) , se detendrá el registro y se esperaran a que vuelvan a sincronizar todos los nodos (12) , realizando el envío de una serie de tramas y detectando el tiempo de envío. g) A partir de ese momento se iniciará el registro en el servidor (13) y se definirá la duración del registro, bien por tiempo en minutos o bien por número total de muestras a capturar. h) El registro se iniciará desde la interfaz de usuario. A partir de ese momento se empezarán a recibir las muestras y a visualizar la señal de cada nodo en la pantalla del interfaz de usuario. En el panel gráfico se mostrarán las últimas muestras recibidas. i) Una vez se ha finalizado el registro, el servidor (13) generará tres ficheros de datos: un primero con los valores absolutos de la señal, un segundo con los valores absolutos de la señal menos el valor medio, y un tercero con los valores de la señal expresados en voltios. j) A partir de este momento, ya se podrá acceder al sistema de archivos del servidor (13) mediante un programa de transferencia de archivos seguro (SCP, Secure Copy Protocol) . Como ejemplo, en la figura 5 se muestran las señales registradas (30) por los seis nodos (12) y el resultado del análisis de frecuencia-número de onda, que proporciona la curva de dispersión de las ondas Rayleigh (31) . Para la comunicación vía Wi-Fi, el sistema posee un mecanismo exclusivo basado en slots de tiempo de transmisión para que transmita cada nodo (12) sin que se produzca una colisión ya que el medio es compartido y los nodos (12) comienzan a muestrear a la misma vez. El mecanismo de retransmisión de tramas perdidas también está supeditado a los slots de tiempo de transmisión. El sistema también se caracteriza por un protocolo propio de sincronización entre todos los nodos (12) , y control de la desviación o deriva entre cada uno de ellos y el servidor (13) . Este aspecto es importante para el posterior correcto análisis de las señales registradas.
Publicaciones:
ES2959543 (26/02/2024) - A1 Solicitud de patente con informe sobre el estado de la técnica
Eventos:
En fecha 29/07/2022 se realizó Registro Instancia de Solicitud
En fecha 29/07/2022 se realizó Admisión a Trámite
En fecha 29/07/2022 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 01/08/2022 se realizó Superado examen de oficio
En fecha 18/05/2023 se realizó Realizado IET
En fecha 22/05/2023 se realizó 1109P_Comunicación Traslado del IET
En fecha 26/02/2024 se realizó Publicación Solicitud
En fecha 26/02/2024 se realizó Publicación Folleto Solicitud con IET (A1)
En fecha 23/04/2024 se realizó PETEX_Petición de examen sustantivo
Pagos:
16/06/2022 - Pago Tasas IET
Fuente de la información
Parte de la información aquí publicada es pública puesto que ha sido obtenida de la Oficina de Propiedad Industrial de los diferentes países el 29/04/2024 y por lo tanto puede ser que la información no esté actualizada.Parte de la información aquí mostrada ha sido calculada por nuestro sistema informático y puede no ser veraz.
Privacidad
Si considera que al información aquí publicada afecta a su privacidad y desea que eliminemos la información aquí publicada envíe un email a info@patentes-y-marcas.com o rellene el formulario que encontrará aquí.Información sobre el registro de patente nacional por Sistema de bajo ruido para la adquisición sincronizada e inalámbrica de señales de ruido ambiente en redes de sensores sísmicos con el número P202230702
El registro de patente nacional por Sistema de bajo ruido para la adquisición sincronizada e inalámbrica de señales de ruido ambiente en redes de sensores sísmicos con el número P202230702 fue solicitada el 29/07/2022. Se trata de un registro en España por lo que este registro no ofrece protección en el resto de países. El registro Sistema de bajo ruido para la adquisición sincronizada e inalámbrica de señales de ruido ambiente en redes de sensores sísmicos con el número P202230702 fue solicitada por UNIVERSITAT D'ALACANT / UNIVERSIDAD DE ALICANTE. El registro [modality] por Sistema de bajo ruido para la adquisición sincronizada e inalámbrica de señales de ruido ambiente en redes de sensores sísmicos con el número P202230702 está clasificado como G01V 1/18,G01V 1/24 según la clasificación internacional de patentes.
Otras invenciones solicitadas en la clasificación internacional de patentes G01V 1/18,G01V 1/24.
Es posible conocer invenciones similares al campo de la técnica se refiere. El registro de patente nacional por Sistema de bajo ruido para la adquisición sincronizada e inalámbrica de señales de ruido ambiente en redes de sensores sísmicos con el número P202230702 está clasificado con la clasificación G01V 1/18,G01V 1/24 por lo que si se desea conocer más registros con la clasificación G01V 1/18,G01V 1/24 clicar aquí.Patentes en España
Es posible conocer todas las invenciones publicadas en España entre las que se encuentra el registro patente nacional por Sistema de bajo ruido para la adquisición sincronizada e inalámbrica de señales de ruido ambiente en redes de sensores sísmicos. Nuestro portal www.patentes-y-marcas.com ofrece acceso a las publicaciones de patentes en España. Conocer las patentes registradas en un país es importante para saber las posibilidades de fabricar, vender o explotar una invención en España.Patentes registradas en la clase G
Es posible conocer todas las patentes registradas en la clase G (FISICA) entre las que se encuentra la patente Sistema de bajo ruido para la adquisición sincronizada e inalámbrica de señales de ruido ambiente en redes de sensores sísmicos con el número P202230702. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase G01
Es posible conocer todas las patentes registradas en la clase G01 (METROLOGIA; ENSAYOS) entre las que se encuentra la patente Sistema de bajo ruido para la adquisición sincronizada e inalámbrica de señales de ruido ambiente en redes de sensores sísmicos con el número P202230702. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase G01V
Es posible conocer todas las patentes registradas en la clase G01V (GEOFISICA; MEDIDA DE LA GRAVITACION; DETECCION DE MASAS U OBJETOS; MARCAS O ETIQUETAS DE IDENTIFICAC) entre las que se encuentra la patente Sistema de bajo ruido para la adquisición sincronizada e inalámbrica de señales de ruido ambiente en redes de sensores sísmicos con el número P202230702. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.
¿Tienes alguna duda?
Escribe tu consulta y te responderemos rápida y gratuitamente.

Otras patentes similares
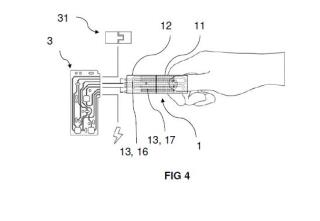
Nanopartículas mesoporosas de sílice y su uso en la captación de inmunoglobulinas
 P202230701
P202230701 P202230704
P202230704Profesionales Recomendados
Barcelona
933182440
España
933182440
España

Barcelona
+34 93 362 16 97
España
+34 93 362 16 97
España

Barcelona
932 593 600
España
932 593 600
España







