


- Home /
- Publicaciones de patentes /
- SISTEMA AÉREO NO TRIPULADO DE ENTREGA Y RETIRADA DE PRODUCTOS DE FORMA AUTÓNOMA
Patente nacional por "SISTEMA AÉREO NO TRIPULADO DE ENTREGA Y RETIRADA DE PRODUCTOS DE FORMA AUTÓNOMA"
Este registro ha sido solicitado por
Persona física
a través del representanteJOSÉ LUIS LAHIDALGA DE CAREAGA
Contacto
- Estado: Vigente
- País:
- España
- Fecha solicitud:
- 13/07/2022
- Número solicitud:
-
P202230642
- Número publicación:
-
ES2958407
- Fecha de concesión:
-
- Inventores:
-
Persona física
- Datos del titular:
-
Persona física
- Datos del representante:
-
José Luis Lahidalga de Careaga
- Clasificación Internacional de Patentes:
- G06Q 10/08,B64D 1/08,B64D 1/22,B64F 1/32,B64U 70/90,A47G 29/14,B65G 57/30,B65G 59/06,B65D 1/34,B65D 43/02,B64U 101/64
- Clasificación Internacional de Patentes de la publicación:
- G06Q 10/08,B64D 1/08,B64D 1/22,B64F 1/32,B64U 70/90,A47G 29/14,B65G 57/30,B65G 59/06,B65D 1/34,B65D 43/02,B64U 101/64
- Fecha de vencimiento:
Quiero registrar una patente

Reivindicaciones:
+ ES-2958407_A11a.- Sistema aéreo no tripulada de entrega y recogida de productos de forma autónoma caracterizado porque el sistema se encuentra constituido por al menos tres equipos interconectados: 1.- Equipo aéreo de distribución y retirada de devoluciones, 2.- Equipo de carga 3.- Equipo de recepción y retirada de devoluciones. Y donde el equipo aéreo de distribución y retirada de devoluciones 1 se encuentra constituido por un grupo de drones situados en las instalaciones de un operador logístico, portando cada dron un eje de fijación. (21) para el transporte de cargas. . Y donde el equipo de carga 2 con el que el dron distribuirá los productos y retirará los productos de devolución y/o los envases reutilizables (30) vacíos, se encuentra constituido por una percha de carga (22) de dos brazos (22.1) y (22.2) que permite que cualquier dron lo pueda transportar mediante el eje (21) enganchado a un soporte de apertura/cierre automática (20) , situándose en los extremos de las perchas de carga (22.1) y (22.1) unos ejes automáticos de fijación (25) para el soporte de los dispositivos de entrega (30) y recogida (26) que portarán los envases de transporte reutilizables (33) estando todas las funciones del equipo controladas y monitorizas por medio de una CPU de control (23) , ayudada por una cámara (24) incorporada que contará con visión diurna/nocturna y video/fotografía y el dispositivo de entrega (30) se posicione correctamente sobre la cesta de recepción (49) , con ayuda de sendos sensores de posición (60) y (63) colocados en el perímetro de la parte inferior del dispositivo de entrega (30) y en marco de soporte de la cesta de recogida (51) . Y donde el equipo de recepción y retirada de devoluciones se encuentra constituido por un elemento principal que consiste en una columna de soporte cilíndrica (40) , que albergará todos los elementos necesarios para el trabajo de recepción de productos y retirada tanto de devoluciones como de los envases de transporte reutilizables (33) vacíos, para lo que presenta sendas bases (41) tanto en su parte superior como inferior que servirán de sujeción por presión, presión obtenida por un dispositivo de ajuste en altura (42) de tipo mecánico o hidráulico presentando en su parte media y por el exterior, una pieza .cilíndrica (52) con movimiento circular de 360° y freno interior (53) , que comporta solidariamente un brazo soporte extensible (45) en dos piezas (45.1) y (45.2) estando todos los mecanismos de la columna de soporte (40) controlados por una CPU de control (44) y un sensor eolocalizable (43) que al detectar la llegada del dron, desplegará la pieza alargada (45.2) por medio del motor eléctrico (50) dejando el conjunto en disposición de uso. 2a.- Sistema aéreo no tripulado de entrega y recogida de productos de forma autónoma de acuerdo con la ia reivindicación caracterizado porque la base de drones se encuentran en las instalaciones de un operador logístico que cuenta con las plataformas de despegue y aterrizaje de los mismos y las instalaciones de almacenamiento y distribución interna de las mercancías. 3a.- Sistema aéreo no tripulado de entrega y recogida de productos de forma autónoma de acuerdo con la ia reivindicación y caracterizado porque el dispositivo de entrega (30) está constituido por un contenedor cúbico que presenta en sus paredes laterales un juego de pestañas de retención (31) controladas y accionadas por unos sensores de movimiento (32) ., de forma que para depositar los envases de transporte reutilizables (33) en el depósito del usuario el sistema de control activa el sensor (32) que abre la pestaña (27) y por gravedad la caja de transporte se deposita en el receptáculo apropiado y con el fin de que los envases de transporte reutilizables (33) no se muevan durante los desplazamientos se han previsto unas barras de fijación verticales (34) que atraviesan los envases de transporte reutilizables (33) por los taladros pasantes (37) ubicados en el reborde perimetral exterior de los mismos y con el fin de que el dispositivo de entrega (30) se posicione correctamente sobre la cesta de recepción (49) , se han posicionado sendos sensores de posición (60) y (63) en el perímetro de la parte inferior del dispositivo de entrega (30) y en marco de soporte de la cesta de recogida (51) . 4a.- Sistema aéreo no tripulado de entrega y recogida de productos de forma autónoma de acuerdo con la 1ª reivindicación y caracterizado porque el dispositivo de recogida (26) está constituido por un contenedor rectangular que en su parte inferior cuenta con unos brazos de captura (29) en forma de ganchos y articulados por la parte inferior del contenedor de recogida (26) por medio de un eje de giro (39) y donde estos brazos de captura (29) cuando llegan al equipo de recepción del usuario 2, aprisionan el envase de transporte reutilizable (33) por medio de los brazos de captura (29) y la introducen en el contenedor por la parte inferior almacenando se consecutivamente los envases de transporte reutilizables (33) hasta llenar totalmente el dispositivo de recogida (26) , con el fin de que el dispositivo de recogida (26) se posicione correctamente sobre la muesca de cesta de recepción (49) , se han posicionado sendos sensores de posición (61) y (62) en el perímetro de la parte inferior del ispositivo de recogida (26) y en la muesca (48) de los envases de transporte reciclables, usados o devueltos. 5a.- Sistema aéreo no tripulado de entrega y recogida de productos de forma autónoma de acuerdo con la ia reivindicación y caracterizado porque los envases de transporte reutilizables (33) consisten en un envase con un recipiente inferior (36) y una tapa superior (35) retenidas entre sí por un cierre magnético (38) s de un material ecológico y reutilizable que cuenta con un reborde perimetral exterior con dos taladros pasantes (37) para el paso de unas barras de fijación (34) que mantendrán los envases de transporte (33) perfectamente estibados dentro del contenedor de entrega (30) . 6a.- Sistema aéreo no tripulado de entrega y recogida de productos de forma autónoma de acuerdo con la ia reivindicación y caracterizado porque el brazo soporte extensible (45) tiene una primera pieza (45.1) solidaria con la pieza cilindrica (52) y bajo ella otra pieza alargada (45.2) y que por medio de una articulación (46) se despliega hacia el exterior y donde la pieza extensible (45.1) presenta en su superficie una muesca (48) donde encaja un envase de transporte reutilizable (33) que puede ser vacío para reutilizar o para devolver y donde la pieza extensible (45.2) extendida por medio de la articulación (46) cuenta con un marco rígido (51) que comporta una cesta (49) donde el dron correspondiente depositará la mercancía a entregar.
Los productos y servicios protegidos por este registro son:
G06Q 10/08 - B64D 1/08 - B64D 1/22 - B64F 1/32 - B64U 70/90 - A47G 29/14 - B65G 57/30 - B65G 59/06 - B65D 1/34 - B65D 43/02 - B64U 101/64
Descripciones:
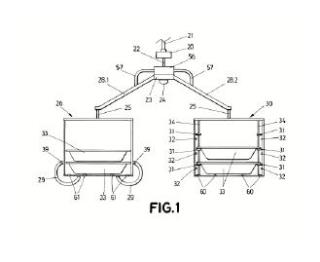
+ ES-2958407_A1 SISTEMA AEREO NO TRIPULADO DE ENTREGA Y RETIRADA DE PRODUCTOS DE FORMA AUTONOMA OBJETO DE LA INVENCIÓN La invención a la que se refiere la presente memoria se refiere a un sistema aéreo no tripulada de entrega y recogida de productos de forma autónoma, es decir que el sistema no necesita de la manipulación de operarios o usuarios para desarrollar su función. El sistema está concebido principalmente para optimizar las entregas capilares a los destinatarios finales de los productos y mercancías. Las principales ventajas que aporta la presente invención pueden resumirse en: -Gran celeridad en las entregas -Proceso totalmente automatizado entre la empresa logística y el cliente -Reducción total de embalajes desechables -Comodidad a los destinatarios de no tener que estar en casa para recoger el producto -Reducción importante en costes logísticos, -Reducción de hasta el 50% de emisiones de CO2 a la atmósfera comparado con el actual sistema de distribución capilar con motores de combustión CAMPO DE LA INVENCIÓN. El campo de la invención se encuentra dentro de la industria de la logística, especialmente de la conocida como logística de última milla ANTECEDENTES DE LA INVENCIÓN Existen algunos antecedentes aislados e independientes sobre sistemas que cumplen con algunos de los parámetros de la invención que preconizamos. Entre ello hemos detectado la invención de la compañía The SkyLife INC (USA) , que en resumen comprende "un sistema de distribución aérea para desplegar ítems, que comprende un contenedor para envío a granel de una pluralidad de cajas (4000, 4100) de despliege dentro del contenedor de envío a granel, conteniendo cada caja de despliegue al enos al menos un ítem, caracterizado porque el sistema de distribución aérea comprende a la vez una pluralidad de cuerdas (4020) , cada cuerda acoplada a una caja de despliege del contenedor de envío a granel y un dispositivo de retardo de caída libre acoplado al contenedor de envío a granel, en donde durante la caída libre retardada cada una de la pluralidad de cajas de despliegue se despliega del contenedor de envío a granel y despliega al menos un ítem contenido dentro de la caja de despliegue. Consideramos este expediente como un antecedente remoto sin que ninguno de sus desarrollos pueda ser considerado como antecedente reseñable.. Expediente de patente en China P CN201711255909. De fecha de solicitud 2017-12-03 Application filed by China Helicopter Research and Development Institute For "Cargo distribution system and method based on unmanned aerial vehicle" Abstract The invention relates to the technical field of unmanned aerial vehicle application, in particular to a cargo distribution system and a cargo distribution method based on an unmanned aerial vehicle; the deliver y system includes: the order generating module is used for generating an order according to the order placing requirement of the user, and the order at least comprises commodity information and user address information; the goods receiving station is configured to receive goods to be delivered and the unmanned aerial vehicle, which are borne by the unmanned aerial vehicle; the route configuration module is used for selecting the address of the cargo receiving station closest to the address of the user according to the order information and then generating deliver y route information for the unmanned aerial vehicle; the unmanned aerial vehicle is used for bearing goods to be delivered and flying according to the control command; and the unmanned aerial vehicle flight control module is used for sending a control instruction for controlling the unmanned aerial vehicle to fly according to the deliver y route information. The cargo distribution system and the distribution method based on the unmanned aerial vehicle have the advantages that the cargo distribution efficiency is higher, the distribution cost is lower, and the distribution punctuality can be ensured. Este expediente se refiere a un Sistema general de distribución pero en ningún momento aporta los elementos directos de la logística que la invención preconizada aporta. Por parte del inventor no se conoce ninguna anterioridad que incorpore las disposiciones que presenta la actual invención, ni las ventajas que conlleva dicha disposición. DESCRIPCIÓN DE LA INVENCIÓN El sistema reivindicado que denominamos SADUM ( Sistema Aéreo De Ultima Milla ) está concebido principalmente para optimizar las entregas capilares a los destinatarios finales de los productos y mercancías y por otro lado, reducir drásticamente el residuo desechable de embalajes en el proceso actual ( estuches y cajas de cartón, retractilados, papeles envoltorios, etc ) Objetivos y ventajas: - A continuación se detallan los principales : Gran celeridad en las entregas, Proceso totalmente automatizado entre la empresa logística y el cliente, Reducción total de embalajes desechables, Comodidad a los destinatarios de no tener que estar en casa para recoger el producto, Reducción importante en costes logísticos. - Componentes KAT (Kit de Aterrizaje) es el componente que el destinatario dispone en su domicilio totalmente automatizado y que se posiciona exclusivamente cuando el producto llega a entregarse. KAS (Kit Aéreo de Suministro) se corresponde con el componente que va fijado en el equipo aéreo que entrega el producto. UDER (Unidad De Envío Reutilizable) , es un envase unificado y reutilizable con tapa que se adapta al KAS para las operaciones de entrega de producto y retirada del envase vacío. - Infraestructura: el sistema puede operar hasta con 4 componentes : PLA (Plataformas de lanzamiento Aéreo) EAP (Equipos aéreos primarios) EAS (Equipos aéreos secundarios) KAT (Kit de aterrizaje) - Aplicabilidad: El sistema SADUM puede aplicarse a todo tipo de productos, se citan algunos de ellos: : Compras e-commerce Compras de todo tipo de comida (menús a la carta, pizzas, hamburguesas, etc.) Compras de medicamentos, productos farmacéuticos en general, herbolarios, etc. Entrega de componentes industriales más pesados entre empresas. - Funcionamiento: El funcionamiento del sistema SADUM está concebido para que resulte lo más fácil posible para todos los operadores componentes en el proceso. Podemos dividirlo en 4 fases principales: Fase de llenado y carga en almacén logístico, Fase de parking de espera en PLA plataforma de lanzamiento aérea fija (existiendo en todas las ciudades con radios de acción de unos 5000 m. En esta fase se cargan los EAP (Equipos aéreos primarios) , con EAS (equipos aéreos secundarios) en los destinos que por mayor distancia lo requieran. Fase de entrega directa entre PLA y KAT con EAS (Equipo Aéreo Secundario) Fase de aterrizaje en KAT totalmente automatizado y coordinado entre la terminal KAT y EAS En la fase de llenado de UDER y carga en EAS en las instalaciones del operador logístico, este dispone de las mercancías procedentes de los diferentes proveedores que venden ON LINE, paletizadas y retractiladas sin necesidad de empaquetar cada unidad en envases de cartón, etc., evitando así más residuos de embalajes en el proceso. Para la óptima funcionalidad del sistema SADUM, los KAT'S llevan una placa con código QR o similar de localización por GPS para realizar la ruta más óptima posible y de manera totalmente automática, 10 segundos antes de que llegue el EAS al destino, este envía una señal al KAT para que se abra y se posicione y prepare para la fase de aterrizaje . Una vez haya aterrizado el EAS en el KAT, se descarga el UDER con el producto comprado y paralelamente, recoge el UDER vacío para su retorno a origen. Para el caso de las compras de menor volumen y peso por unidad, se ha diseñado un KAS (Kit Aéreo de Suministro) que permite varias entregas de productos (y sus correspondientes ecogidas de UDER'S vacíos) en diferentes destinos, aumentando exponencialmente el tiempo de entrega de los productos en cada destino desde la realización del pedido. DESCRIPCIÓN DE LOS DIBUJOS Para una mejor comprensión de la invención se adjunta una hoja de planos en la que se aprecian las siguientes figuras: FIGURA 1.-Vista esquemática en sección del equipo de carga 2. FIGURA 2.-Vista esquemática en sección de un modelo de contenedor reciclable. FIGURA 2.1. Vista esquemática en sección de detalle de unión de la tapa con el fondo del contenedor reciclable FIGURA 3.-Vista esquemática en sección del equipo de recepción 3 en estado de reposo FIGURA 4.-Vista esquemática en sección del equipo de recepción 3 poniendo se en marcha y preparando el brazo de recepción. FIGURA 5 Vista esquemática en sección del equipo de recepción 3 en estado trabajo esperando la llegada del dron con las mercancías y el contenedor de retirada en su posición. Y en dichas figuras, con la misma referencia se denominan idénticos elementos, entre los que distinguimos: (20) .- soporte de apertura/cierre automático que permite que cualquier dron lo pueda transportar. (21) .- eje de fijación al dron, (22) .- percha de carga, (22.1) y (22.2) .- brazos de la percha de carga, (23) .-CPU de control y guiado de todo el equipo. (24) .- cámara de visión nocturna con sensor de aproximación y video. (25) .- ejes automáticos de fijación de los dispositivos de entrega y recepción, (26) .- dispositivo de recogida, (29) .- brazos de captura de los contenedores, (30) .- dispositivo de entrega, (31) .- pestañas de retención para los contenedores de entrega, (32) .- sensores de control y accionamiento de las pestañas de retención de los contenedores de entrega, (33) .- envases de transporte reutilizables, (34) .- barras de inmovilización de los envases de transporte, (35) .- tapa de los envases de transporte, (36) .- recipiente inferior del envase de transporte, (37) .- taladros pasantes de los envases de transporte, (38) .- dispositivo de cierre/apertura de los envases de transporte (39) .- eje de giro (40) .- columna de soporte, elemento cilíndrico que albergará el resto de los elementos necesarios para el trabajo de recepción y retirada de devoluciones, (41) .- base superior e inferior de la columna de soporte, (42) .- Dispositivo hidráulico de ajuste en altura de la columna de soporte, (43) .- sensor de presencia, localización y activación del equipo de recepción y retirada de devoluciones, (44) .- CPU de control del equipo, (45) .- brazo soporte extensible del equipo, (46) .- articulación de apertura del brazo extensible, (47) .- brazo soporte de la entrega y recogida de mercancías, (48) .- muesca para dejar los envases de transporte reciclables, usados o devueltos, (49) .- cesta de recogida de las entregas, (50) .- motor eléctrico de apertura y despliegue del brazo soporte del equipo; (51) .- marco de soporte de la cesta de recogida. (52) .- pieza cilíndrica, (53) .- freno interior, (55) .- muesca de la tapa del contenedor reciclable, (56) .- dispositivo hidráulico de equilibrio, (57) .- brazos del dispositivo hidráulico de equilibrio, (60) .- sensores de posición del dispositivo de entrega (30) , (61) .- sensores de posición del dispositivo de recogida (26) , (62) .- sensores de posición de la muesca de devolución (48) , (63) .- sensores de posición del marco de soporte de la cesta de recogida (51) , REALIZACIÓN PREFERENTE DE LA INVENCIÓN. La invención a la que se describe en la presente memoria se refiere a un sistema aéreo no tripulada de entrega y recogida de productos de forma autónoma, es decir que el sistema no necesita de la manipulación de operarios o usuarios para desarrollar su función. El sistema está concebido principalmente para optimizar las entregas capilares a los destinatarios finales de los productos y mercancías. En una realización preferente el sistema se encuentra constituido por al menos tres equipos. 1.- Equipo aéreo de distribución y retirada de devoluciones, 2.- Equipo de carga 3.- Equipo de recepción y retirada de devoluciones. Todas estas gestiones se realizarán de forma autónoma sin necesidad de que ningún usuario necesite manipular el sistema en ningún momento y tampoco es necesaria la presencia del usuario para la recogida de la mercancía. 1.- El equipo aéreo de distribución y retirada de devoluciones se encuentra constituido a base de drones, entendiéndose por dron, un vehículo aéreo no tripulado capaz de mantener de manera autónoma un nivel de vuelo controlado y sostenido. Esta primera fase de llenado y carga de las mercancías se realizan en las instalaciones del operador logístico, que cuenta con la base de drones, las plataformas de despegue y aterrizaje de los mismos y las instalaciones de almacenamiento y distribución interna de las mercancías. Este dispone de las mercancías procedentes de los diferentes proveedores que venden ON LINE, paletizadas y retractiladas sin necesidad de empaquetar cada unidad en envases individuales de cartón, plástico etc, evitando así más residuos de embalajes en el proceso 2.- El equipo de carga con el que el dron distribuirá los productos y retirará los productos de devolución y/o los envases reutilizables (30) vacíos, se encuentra constituido por los siguientes elementos contenidos en las figuras 1 y 2. - Percha de carga (22) de dos brazos (22.1) y (22.2) que permite que cualquier dron lo pueda transportar y que al menos lo constituyen los siguiente elementos, tal y como se representan en las figuras 3, 4 y 5. La percha de carga (22) lleva un soporte de apertura/cierre automática (20) que permite que cualquier dron lo pueda transportar y que las operaciones de carga/descarga se puedan automatizar, de forma que en una línea de perchas preparadas para la distribución, el dron por medio del eje de fijación (21) recoge la mercancía a distribuir o deja la mercancía de vuelta para su tratamiento. En los extremos de los Brazos (22.1) y (22.2) de la percha de carga (22) se sitúan unos ejes automáticos de fijación (25) para el soporte de los dispositivos de entrega (30) y recogida (26) . El dispositivo de entrega (30) está constituido por un contenedor preferentemente cúbico que presenta en sus paredes laterales un juego de pestañas de retención (31) controladas y accionadas por unos sensores de movimiento (32) de forma que para depositar los envases de transporte reutilizables (33) en el depósito del usuario el sistema de control activa el sensor (32) que abre la pestaña (31) y por gravedad la caja de transporte se deposita en el receptáculo apropiado. Con el fin de que las cajas de transporte (33) no se muevan durante los desplazamientos se han previsto unas barras de fijación verticales (34) que atraviesan los envases de transporte reutilizables (33) por los taladros (37) , y con el fin de que el dispositivo de entrega (30) se posicione correctamente sobre la cesta de recepción (49) , se han posicionado sendos sensores de posición (60) y (63) en el perímetro de la parte inferior del dispositivo de entrega (30) y en marco de soporte de la cesta de recogida (51) . El dispositivo de recogida (26) está constituido por un contenedor preferentemente cúbico que presenta en su parte inferior unos brazos de captura (29) en forma de ganchos y articulados por la parte inferior del contenedor de recogida (26) por medio de un eje de giro (39) . Estos brazos de captura (29) cuando llegan al equipo de recepción del usuario 2, aprisionan el envase de transporte reutilizable (33) por medio de los brazos de captura (29) y la introducen en el contenedor por la parte inferior. De esta forma se pueden ir almacenando consecutivamente los envases de transporte reutilizables (33) hasta llenar totalmente el dispositivo de recogida (26) . Con el fin de que el dispositivo de recogida (26) se posicione correctamente sobre la muesca de cesta de recepción (49) , se han posicionado sendos sensores de posición (61) y (62) en el perímetro de la parte inferior del dispositivo de recogida (26) y en la muesca (48) de los envases de transporte reciclables, usados o devueltos. Todas las funciones del equipo están controladas y monitorizas por medio de una CPU de control (23) , ayudada por una cámara (24) incorporada que contará con visión diurna/nocturna y video/fotografía. Los envases de transporte reutilizables (33) consisten en un envase con un recipiente inferior (36) y una tapa superior (35) de un material ecológico y reutilizable y donde el recipiente inferior (36) cuenta con un reborde perimetral exterior con dos taladros pasantes (37) para el paso de unas barras de fijación (34) que mantendrán los envases de transporte (33) perfectamente estibados dentro del contenedor de entrega (30) y además con dos muescas opuestas (55) en su perímetro exterior para poder retirar la tapa superior (35) . 3.- Equipo de recepción y retirada de devoluciones. Este equipo se encuentra constituido por un elemento principal que consiste en una columna de soporte (40) , preferentemente cilindrica que albergará todos los elementos necesarios para el trabajo de recepción de productos y retirada tanto de devoluciones como de los envases de transporte reutilizables (33) vacíos. La columna de soporte (40) presenta sendas bases (41) tanto en su parte superior como inferior que servirán de sujeción por presión, presión obtenida por un dispositivo de ajuste en altura (42) de tipo mecánico o hidráulico. La columna de soporte (40) presenta en su parte media y por el exterior, una pieza cilindrica (52) con movimiento circular de 360° y freno interior (53) , que comporta solidariamente un brazo soporte extensible (45) en dos piezas (45.1) y (45.2) . Este brazo soporte extensible (45) tiene una primera pieza (45.1) solidaria con la pieza cilindrica (52) y bajo ella otra pieza alargada (45.2) plegada sobre la anterior y que por medio de una articulación (46) gira y se despliega hacia el exterior. La pieza extensible (45.1) presenta en su superficie una muesca (48) donde encaja un envase de transporte reutilizable (33) que puede ser vacio para reutilizar o lleno para devolver. Más hacia el extremo exterior de esta pieza se encuentra un marco rígido (51) con una cesta (49) donde el dron correspondiente depositará la mercancía a entregar. Todos los mecanismos de la columna de soporte (40) se encuentran controlados por una CPU de control (44) y para ayudar a la localización, acercamiento y posicionamiento del dron, la columna soporte (40) cuenta con un sensor geolocalizable (43) que al detectar la llegada del dron, girará la pieza circular (50) y desplegará las piezas alargadas (45.1) y (45.2) (45.2) por medio del motor eléctrico (50) dejando el conjunto en disposición de uso. Descrita suficientemente la naturaleza de la invención, asi como la manera de llevarse a la práctica, debe hacerse constar que las disposiciones anteriormente indicadas y representadas en los dibujos adjuntos son susceptibles de modificaciones e en cuanto no alteren sus principios fundamentales, establecidos en los párrafos anteriores y resumidos en las siguientes reivindicaciones.
Publicaciones:
ES2958407 (08/02/2024) - A1 Solicitud de patente con informe sobre el estado de la técnica
Eventos:
En fecha 13/07/2022 se realizó Registro Instancia de Solicitud
En fecha 13/07/2022 se realizó Admisión a Trámite
En fecha 13/07/2022 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 22/07/2022 se realizó Concesión solicitud de reducción de tasas
En fecha 29/07/2022 se realizó Publicación concesión reducción de tasas
En fecha 07/09/2022 se realizó Superado examen de oficio
En fecha 24/10/2022 se realizó Realizado IET
En fecha 27/10/2022 se realizó 1109P_Comunicación Traslado del IET
En fecha 08/02/2024 se realizó Publicación Solicitud
En fecha 08/02/2024 se realizó Publicación Folleto Solicitud con IET (A1)
En fecha 15/02/2024 se realizó PETEX_Petición de examen sustantivo
Pagos:
13/07/2022 - Pago Tasas IET
+ ES-2958407_A11a.- Sistema aéreo no tripulada de entrega y recogida de productos de forma autónoma caracterizado porque el sistema se encuentra constituido por al menos tres equipos interconectados: 1.- Equipo aéreo de distribución y retirada de devoluciones, 2.- Equipo de carga 3.- Equipo de recepción y retirada de devoluciones. Y donde el equipo aéreo de distribución y retirada de devoluciones 1 se encuentra constituido por un grupo de drones situados en las instalaciones de un operador logístico, portando cada dron un eje de fijación. (21) para el transporte de cargas. . Y donde el equipo de carga 2 con el que el dron distribuirá los productos y retirará los productos de devolución y/o los envases reutilizables (30) vacíos, se encuentra constituido por una percha de carga (22) de dos brazos (22.1) y (22.2) que permite que cualquier dron lo pueda transportar mediante el eje (21) enganchado a un soporte de apertura/cierre automática (20) , situándose en los extremos de las perchas de carga (22.1) y (22.1) unos ejes automáticos de fijación (25) para el soporte de los dispositivos de entrega (30) y recogida (26) que portarán los envases de transporte reutilizables (33) estando todas las funciones del equipo controladas y monitorizas por medio de una CPU de control (23) , ayudada por una cámara (24) incorporada que contará con visión diurna/nocturna y video/fotografía y el dispositivo de entrega (30) se posicione correctamente sobre la cesta de recepción (49) , con ayuda de sendos sensores de posición (60) y (63) colocados en el perímetro de la parte inferior del dispositivo de entrega (30) y en marco de soporte de la cesta de recogida (51) . Y donde el equipo de recepción y retirada de devoluciones se encuentra constituido por un elemento principal que consiste en una columna de soporte cilíndrica (40) , que albergará todos los elementos necesarios para el trabajo de recepción de productos y retirada tanto de devoluciones como de los envases de transporte reutilizables (33) vacíos, para lo que presenta sendas bases (41) tanto en su parte superior como inferior que servirán de sujeción por presión, presión obtenida por un dispositivo de ajuste en altura (42) de tipo mecánico o hidráulico presentando en su parte media y por el exterior, una pieza .cilíndrica (52) con movimiento circular de 360° y freno interior (53) , que comporta solidariamente un brazo soporte extensible (45) en dos piezas (45.1) y (45.2) estando todos los mecanismos de la columna de soporte (40) controlados por una CPU de control (44) y un sensor eolocalizable (43) que al detectar la llegada del dron, desplegará la pieza alargada (45.2) por medio del motor eléctrico (50) dejando el conjunto en disposición de uso. 2a.- Sistema aéreo no tripulado de entrega y recogida de productos de forma autónoma de acuerdo con la ia reivindicación caracterizado porque la base de drones se encuentran en las instalaciones de un operador logístico que cuenta con las plataformas de despegue y aterrizaje de los mismos y las instalaciones de almacenamiento y distribución interna de las mercancías. 3a.- Sistema aéreo no tripulado de entrega y recogida de productos de forma autónoma de acuerdo con la ia reivindicación y caracterizado porque el dispositivo de entrega (30) está constituido por un contenedor cúbico que presenta en sus paredes laterales un juego de pestañas de retención (31) controladas y accionadas por unos sensores de movimiento (32) ., de forma que para depositar los envases de transporte reutilizables (33) en el depósito del usuario el sistema de control activa el sensor (32) que abre la pestaña (27) y por gravedad la caja de transporte se deposita en el receptáculo apropiado y con el fin de que los envases de transporte reutilizables (33) no se muevan durante los desplazamientos se han previsto unas barras de fijación verticales (34) que atraviesan los envases de transporte reutilizables (33) por los taladros pasantes (37) ubicados en el reborde perimetral exterior de los mismos y con el fin de que el dispositivo de entrega (30) se posicione correctamente sobre la cesta de recepción (49) , se han posicionado sendos sensores de posición (60) y (63) en el perímetro de la parte inferior del dispositivo de entrega (30) y en marco de soporte de la cesta de recogida (51) . 4a.- Sistema aéreo no tripulado de entrega y recogida de productos de forma autónoma de acuerdo con la 1ª reivindicación y caracterizado porque el dispositivo de recogida (26) está constituido por un contenedor rectangular que en su parte inferior cuenta con unos brazos de captura (29) en forma de ganchos y articulados por la parte inferior del contenedor de recogida (26) por medio de un eje de giro (39) y donde estos brazos de captura (29) cuando llegan al equipo de recepción del usuario 2, aprisionan el envase de transporte reutilizable (33) por medio de los brazos de captura (29) y la introducen en el contenedor por la parte inferior almacenando se consecutivamente los envases de transporte reutilizables (33) hasta llenar totalmente el dispositivo de recogida (26) , con el fin de que el dispositivo de recogida (26) se posicione correctamente sobre la muesca de cesta de recepción (49) , se han posicionado sendos sensores de posición (61) y (62) en el perímetro de la parte inferior del ispositivo de recogida (26) y en la muesca (48) de los envases de transporte reciclables, usados o devueltos. 5a.- Sistema aéreo no tripulado de entrega y recogida de productos de forma autónoma de acuerdo con la ia reivindicación y caracterizado porque los envases de transporte reutilizables (33) consisten en un envase con un recipiente inferior (36) y una tapa superior (35) retenidas entre sí por un cierre magnético (38) s de un material ecológico y reutilizable que cuenta con un reborde perimetral exterior con dos taladros pasantes (37) para el paso de unas barras de fijación (34) que mantendrán los envases de transporte (33) perfectamente estibados dentro del contenedor de entrega (30) . 6a.- Sistema aéreo no tripulado de entrega y recogida de productos de forma autónoma de acuerdo con la ia reivindicación y caracterizado porque el brazo soporte extensible (45) tiene una primera pieza (45.1) solidaria con la pieza cilindrica (52) y bajo ella otra pieza alargada (45.2) y que por medio de una articulación (46) se despliega hacia el exterior y donde la pieza extensible (45.1) presenta en su superficie una muesca (48) donde encaja un envase de transporte reutilizable (33) que puede ser vacío para reutilizar o para devolver y donde la pieza extensible (45.2) extendida por medio de la articulación (46) cuenta con un marco rígido (51) que comporta una cesta (49) donde el dron correspondiente depositará la mercancía a entregar.
Los productos y servicios protegidos por este registro son:
G06Q 10/08 - B64D 1/08 - B64D 1/22 - B64F 1/32 - B64U 70/90 - A47G 29/14 - B65G 57/30 - B65G 59/06 - B65D 1/34 - B65D 43/02 - B64U 101/64
Descripciones:
+ ES-2958407_A1 SISTEMA AEREO NO TRIPULADO DE ENTREGA Y RETIRADA DE PRODUCTOS DE FORMA AUTONOMA OBJETO DE LA INVENCIÓN La invención a la que se refiere la presente memoria se refiere a un sistema aéreo no tripulada de entrega y recogida de productos de forma autónoma, es decir que el sistema no necesita de la manipulación de operarios o usuarios para desarrollar su función. El sistema está concebido principalmente para optimizar las entregas capilares a los destinatarios finales de los productos y mercancías. Las principales ventajas que aporta la presente invención pueden resumirse en: -Gran celeridad en las entregas -Proceso totalmente automatizado entre la empresa logística y el cliente -Reducción total de embalajes desechables -Comodidad a los destinatarios de no tener que estar en casa para recoger el producto -Reducción importante en costes logísticos, -Reducción de hasta el 50% de emisiones de CO2 a la atmósfera comparado con el actual sistema de distribución capilar con motores de combustión CAMPO DE LA INVENCIÓN. El campo de la invención se encuentra dentro de la industria de la logística, especialmente de la conocida como logística de última milla ANTECEDENTES DE LA INVENCIÓN Existen algunos antecedentes aislados e independientes sobre sistemas que cumplen con algunos de los parámetros de la invención que preconizamos. Entre ello hemos detectado la invención de la compañía The SkyLife INC (USA) , que en resumen comprende "un sistema de distribución aérea para desplegar ítems, que comprende un contenedor para envío a granel de una pluralidad de cajas (4000, 4100) de despliege dentro del contenedor de envío a granel, conteniendo cada caja de despliegue al enos al menos un ítem, caracterizado porque el sistema de distribución aérea comprende a la vez una pluralidad de cuerdas (4020) , cada cuerda acoplada a una caja de despliege del contenedor de envío a granel y un dispositivo de retardo de caída libre acoplado al contenedor de envío a granel, en donde durante la caída libre retardada cada una de la pluralidad de cajas de despliegue se despliega del contenedor de envío a granel y despliega al menos un ítem contenido dentro de la caja de despliegue. Consideramos este expediente como un antecedente remoto sin que ninguno de sus desarrollos pueda ser considerado como antecedente reseñable.. Expediente de patente en China P CN201711255909. De fecha de solicitud 2017-12-03 Application filed by China Helicopter Research and Development Institute For "Cargo distribution system and method based on unmanned aerial vehicle" Abstract The invention relates to the technical field of unmanned aerial vehicle application, in particular to a cargo distribution system and a cargo distribution method based on an unmanned aerial vehicle; the deliver y system includes: the order generating module is used for generating an order according to the order placing requirement of the user, and the order at least comprises commodity information and user address information; the goods receiving station is configured to receive goods to be delivered and the unmanned aerial vehicle, which are borne by the unmanned aerial vehicle; the route configuration module is used for selecting the address of the cargo receiving station closest to the address of the user according to the order information and then generating deliver y route information for the unmanned aerial vehicle; the unmanned aerial vehicle is used for bearing goods to be delivered and flying according to the control command; and the unmanned aerial vehicle flight control module is used for sending a control instruction for controlling the unmanned aerial vehicle to fly according to the deliver y route information. The cargo distribution system and the distribution method based on the unmanned aerial vehicle have the advantages that the cargo distribution efficiency is higher, the distribution cost is lower, and the distribution punctuality can be ensured. Este expediente se refiere a un Sistema general de distribución pero en ningún momento aporta los elementos directos de la logística que la invención preconizada aporta. Por parte del inventor no se conoce ninguna anterioridad que incorpore las disposiciones que presenta la actual invención, ni las ventajas que conlleva dicha disposición. DESCRIPCIÓN DE LA INVENCIÓN El sistema reivindicado que denominamos SADUM ( Sistema Aéreo De Ultima Milla ) está concebido principalmente para optimizar las entregas capilares a los destinatarios finales de los productos y mercancías y por otro lado, reducir drásticamente el residuo desechable de embalajes en el proceso actual ( estuches y cajas de cartón, retractilados, papeles envoltorios, etc ) Objetivos y ventajas: - A continuación se detallan los principales : Gran celeridad en las entregas, Proceso totalmente automatizado entre la empresa logística y el cliente, Reducción total de embalajes desechables, Comodidad a los destinatarios de no tener que estar en casa para recoger el producto, Reducción importante en costes logísticos. - Componentes KAT (Kit de Aterrizaje) es el componente que el destinatario dispone en su domicilio totalmente automatizado y que se posiciona exclusivamente cuando el producto llega a entregarse. KAS (Kit Aéreo de Suministro) se corresponde con el componente que va fijado en el equipo aéreo que entrega el producto. UDER (Unidad De Envío Reutilizable) , es un envase unificado y reutilizable con tapa que se adapta al KAS para las operaciones de entrega de producto y retirada del envase vacío. - Infraestructura: el sistema puede operar hasta con 4 componentes : PLA (Plataformas de lanzamiento Aéreo) EAP (Equipos aéreos primarios) EAS (Equipos aéreos secundarios) KAT (Kit de aterrizaje) - Aplicabilidad: El sistema SADUM puede aplicarse a todo tipo de productos, se citan algunos de ellos: : Compras e-commerce Compras de todo tipo de comida (menús a la carta, pizzas, hamburguesas, etc.) Compras de medicamentos, productos farmacéuticos en general, herbolarios, etc. Entrega de componentes industriales más pesados entre empresas. - Funcionamiento: El funcionamiento del sistema SADUM está concebido para que resulte lo más fácil posible para todos los operadores componentes en el proceso. Podemos dividirlo en 4 fases principales: Fase de llenado y carga en almacén logístico, Fase de parking de espera en PLA plataforma de lanzamiento aérea fija (existiendo en todas las ciudades con radios de acción de unos 5000 m. En esta fase se cargan los EAP (Equipos aéreos primarios) , con EAS (equipos aéreos secundarios) en los destinos que por mayor distancia lo requieran. Fase de entrega directa entre PLA y KAT con EAS (Equipo Aéreo Secundario) Fase de aterrizaje en KAT totalmente automatizado y coordinado entre la terminal KAT y EAS En la fase de llenado de UDER y carga en EAS en las instalaciones del operador logístico, este dispone de las mercancías procedentes de los diferentes proveedores que venden ON LINE, paletizadas y retractiladas sin necesidad de empaquetar cada unidad en envases de cartón, etc., evitando así más residuos de embalajes en el proceso. Para la óptima funcionalidad del sistema SADUM, los KAT'S llevan una placa con código QR o similar de localización por GPS para realizar la ruta más óptima posible y de manera totalmente automática, 10 segundos antes de que llegue el EAS al destino, este envía una señal al KAT para que se abra y se posicione y prepare para la fase de aterrizaje . Una vez haya aterrizado el EAS en el KAT, se descarga el UDER con el producto comprado y paralelamente, recoge el UDER vacío para su retorno a origen. Para el caso de las compras de menor volumen y peso por unidad, se ha diseñado un KAS (Kit Aéreo de Suministro) que permite varias entregas de productos (y sus correspondientes ecogidas de UDER'S vacíos) en diferentes destinos, aumentando exponencialmente el tiempo de entrega de los productos en cada destino desde la realización del pedido. DESCRIPCIÓN DE LOS DIBUJOS Para una mejor comprensión de la invención se adjunta una hoja de planos en la que se aprecian las siguientes figuras: FIGURA 1.-Vista esquemática en sección del equipo de carga 2. FIGURA 2.-Vista esquemática en sección de un modelo de contenedor reciclable. FIGURA 2.1. Vista esquemática en sección de detalle de unión de la tapa con el fondo del contenedor reciclable FIGURA 3.-Vista esquemática en sección del equipo de recepción 3 en estado de reposo FIGURA 4.-Vista esquemática en sección del equipo de recepción 3 poniendo se en marcha y preparando el brazo de recepción. FIGURA 5 Vista esquemática en sección del equipo de recepción 3 en estado trabajo esperando la llegada del dron con las mercancías y el contenedor de retirada en su posición. Y en dichas figuras, con la misma referencia se denominan idénticos elementos, entre los que distinguimos: (20) .- soporte de apertura/cierre automático que permite que cualquier dron lo pueda transportar. (21) .- eje de fijación al dron, (22) .- percha de carga, (22.1) y (22.2) .- brazos de la percha de carga, (23) .-CPU de control y guiado de todo el equipo. (24) .- cámara de visión nocturna con sensor de aproximación y video. (25) .- ejes automáticos de fijación de los dispositivos de entrega y recepción, (26) .- dispositivo de recogida, (29) .- brazos de captura de los contenedores, (30) .- dispositivo de entrega, (31) .- pestañas de retención para los contenedores de entrega, (32) .- sensores de control y accionamiento de las pestañas de retención de los contenedores de entrega, (33) .- envases de transporte reutilizables, (34) .- barras de inmovilización de los envases de transporte, (35) .- tapa de los envases de transporte, (36) .- recipiente inferior del envase de transporte, (37) .- taladros pasantes de los envases de transporte, (38) .- dispositivo de cierre/apertura de los envases de transporte (39) .- eje de giro (40) .- columna de soporte, elemento cilíndrico que albergará el resto de los elementos necesarios para el trabajo de recepción y retirada de devoluciones, (41) .- base superior e inferior de la columna de soporte, (42) .- Dispositivo hidráulico de ajuste en altura de la columna de soporte, (43) .- sensor de presencia, localización y activación del equipo de recepción y retirada de devoluciones, (44) .- CPU de control del equipo, (45) .- brazo soporte extensible del equipo, (46) .- articulación de apertura del brazo extensible, (47) .- brazo soporte de la entrega y recogida de mercancías, (48) .- muesca para dejar los envases de transporte reciclables, usados o devueltos, (49) .- cesta de recogida de las entregas, (50) .- motor eléctrico de apertura y despliegue del brazo soporte del equipo; (51) .- marco de soporte de la cesta de recogida. (52) .- pieza cilíndrica, (53) .- freno interior, (55) .- muesca de la tapa del contenedor reciclable, (56) .- dispositivo hidráulico de equilibrio, (57) .- brazos del dispositivo hidráulico de equilibrio, (60) .- sensores de posición del dispositivo de entrega (30) , (61) .- sensores de posición del dispositivo de recogida (26) , (62) .- sensores de posición de la muesca de devolución (48) , (63) .- sensores de posición del marco de soporte de la cesta de recogida (51) , REALIZACIÓN PREFERENTE DE LA INVENCIÓN. La invención a la que se describe en la presente memoria se refiere a un sistema aéreo no tripulada de entrega y recogida de productos de forma autónoma, es decir que el sistema no necesita de la manipulación de operarios o usuarios para desarrollar su función. El sistema está concebido principalmente para optimizar las entregas capilares a los destinatarios finales de los productos y mercancías. En una realización preferente el sistema se encuentra constituido por al menos tres equipos. 1.- Equipo aéreo de distribución y retirada de devoluciones, 2.- Equipo de carga 3.- Equipo de recepción y retirada de devoluciones. Todas estas gestiones se realizarán de forma autónoma sin necesidad de que ningún usuario necesite manipular el sistema en ningún momento y tampoco es necesaria la presencia del usuario para la recogida de la mercancía. 1.- El equipo aéreo de distribución y retirada de devoluciones se encuentra constituido a base de drones, entendiéndose por dron, un vehículo aéreo no tripulado capaz de mantener de manera autónoma un nivel de vuelo controlado y sostenido. Esta primera fase de llenado y carga de las mercancías se realizan en las instalaciones del operador logístico, que cuenta con la base de drones, las plataformas de despegue y aterrizaje de los mismos y las instalaciones de almacenamiento y distribución interna de las mercancías. Este dispone de las mercancías procedentes de los diferentes proveedores que venden ON LINE, paletizadas y retractiladas sin necesidad de empaquetar cada unidad en envases individuales de cartón, plástico etc, evitando así más residuos de embalajes en el proceso 2.- El equipo de carga con el que el dron distribuirá los productos y retirará los productos de devolución y/o los envases reutilizables (30) vacíos, se encuentra constituido por los siguientes elementos contenidos en las figuras 1 y 2. - Percha de carga (22) de dos brazos (22.1) y (22.2) que permite que cualquier dron lo pueda transportar y que al menos lo constituyen los siguiente elementos, tal y como se representan en las figuras 3, 4 y 5. La percha de carga (22) lleva un soporte de apertura/cierre automática (20) que permite que cualquier dron lo pueda transportar y que las operaciones de carga/descarga se puedan automatizar, de forma que en una línea de perchas preparadas para la distribución, el dron por medio del eje de fijación (21) recoge la mercancía a distribuir o deja la mercancía de vuelta para su tratamiento. En los extremos de los Brazos (22.1) y (22.2) de la percha de carga (22) se sitúan unos ejes automáticos de fijación (25) para el soporte de los dispositivos de entrega (30) y recogida (26) . El dispositivo de entrega (30) está constituido por un contenedor preferentemente cúbico que presenta en sus paredes laterales un juego de pestañas de retención (31) controladas y accionadas por unos sensores de movimiento (32) de forma que para depositar los envases de transporte reutilizables (33) en el depósito del usuario el sistema de control activa el sensor (32) que abre la pestaña (31) y por gravedad la caja de transporte se deposita en el receptáculo apropiado. Con el fin de que las cajas de transporte (33) no se muevan durante los desplazamientos se han previsto unas barras de fijación verticales (34) que atraviesan los envases de transporte reutilizables (33) por los taladros (37) , y con el fin de que el dispositivo de entrega (30) se posicione correctamente sobre la cesta de recepción (49) , se han posicionado sendos sensores de posición (60) y (63) en el perímetro de la parte inferior del dispositivo de entrega (30) y en marco de soporte de la cesta de recogida (51) . El dispositivo de recogida (26) está constituido por un contenedor preferentemente cúbico que presenta en su parte inferior unos brazos de captura (29) en forma de ganchos y articulados por la parte inferior del contenedor de recogida (26) por medio de un eje de giro (39) . Estos brazos de captura (29) cuando llegan al equipo de recepción del usuario 2, aprisionan el envase de transporte reutilizable (33) por medio de los brazos de captura (29) y la introducen en el contenedor por la parte inferior. De esta forma se pueden ir almacenando consecutivamente los envases de transporte reutilizables (33) hasta llenar totalmente el dispositivo de recogida (26) . Con el fin de que el dispositivo de recogida (26) se posicione correctamente sobre la muesca de cesta de recepción (49) , se han posicionado sendos sensores de posición (61) y (62) en el perímetro de la parte inferior del dispositivo de recogida (26) y en la muesca (48) de los envases de transporte reciclables, usados o devueltos. Todas las funciones del equipo están controladas y monitorizas por medio de una CPU de control (23) , ayudada por una cámara (24) incorporada que contará con visión diurna/nocturna y video/fotografía. Los envases de transporte reutilizables (33) consisten en un envase con un recipiente inferior (36) y una tapa superior (35) de un material ecológico y reutilizable y donde el recipiente inferior (36) cuenta con un reborde perimetral exterior con dos taladros pasantes (37) para el paso de unas barras de fijación (34) que mantendrán los envases de transporte (33) perfectamente estibados dentro del contenedor de entrega (30) y además con dos muescas opuestas (55) en su perímetro exterior para poder retirar la tapa superior (35) . 3.- Equipo de recepción y retirada de devoluciones. Este equipo se encuentra constituido por un elemento principal que consiste en una columna de soporte (40) , preferentemente cilindrica que albergará todos los elementos necesarios para el trabajo de recepción de productos y retirada tanto de devoluciones como de los envases de transporte reutilizables (33) vacíos. La columna de soporte (40) presenta sendas bases (41) tanto en su parte superior como inferior que servirán de sujeción por presión, presión obtenida por un dispositivo de ajuste en altura (42) de tipo mecánico o hidráulico. La columna de soporte (40) presenta en su parte media y por el exterior, una pieza cilindrica (52) con movimiento circular de 360° y freno interior (53) , que comporta solidariamente un brazo soporte extensible (45) en dos piezas (45.1) y (45.2) . Este brazo soporte extensible (45) tiene una primera pieza (45.1) solidaria con la pieza cilindrica (52) y bajo ella otra pieza alargada (45.2) plegada sobre la anterior y que por medio de una articulación (46) gira y se despliega hacia el exterior. La pieza extensible (45.1) presenta en su superficie una muesca (48) donde encaja un envase de transporte reutilizable (33) que puede ser vacio para reutilizar o lleno para devolver. Más hacia el extremo exterior de esta pieza se encuentra un marco rígido (51) con una cesta (49) donde el dron correspondiente depositará la mercancía a entregar. Todos los mecanismos de la columna de soporte (40) se encuentran controlados por una CPU de control (44) y para ayudar a la localización, acercamiento y posicionamiento del dron, la columna soporte (40) cuenta con un sensor geolocalizable (43) que al detectar la llegada del dron, girará la pieza circular (50) y desplegará las piezas alargadas (45.1) y (45.2) (45.2) por medio del motor eléctrico (50) dejando el conjunto en disposición de uso. Descrita suficientemente la naturaleza de la invención, asi como la manera de llevarse a la práctica, debe hacerse constar que las disposiciones anteriormente indicadas y representadas en los dibujos adjuntos son susceptibles de modificaciones e en cuanto no alteren sus principios fundamentales, establecidos en los párrafos anteriores y resumidos en las siguientes reivindicaciones.
Publicaciones:
ES2958407 (08/02/2024) - A1 Solicitud de patente con informe sobre el estado de la técnica
Eventos:
En fecha 13/07/2022 se realizó Registro Instancia de Solicitud
En fecha 13/07/2022 se realizó Admisión a Trámite
En fecha 13/07/2022 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 22/07/2022 se realizó Concesión solicitud de reducción de tasas
En fecha 29/07/2022 se realizó Publicación concesión reducción de tasas
En fecha 07/09/2022 se realizó Superado examen de oficio
En fecha 24/10/2022 se realizó Realizado IET
En fecha 27/10/2022 se realizó 1109P_Comunicación Traslado del IET
En fecha 08/02/2024 se realizó Publicación Solicitud
En fecha 08/02/2024 se realizó Publicación Folleto Solicitud con IET (A1)
En fecha 15/02/2024 se realizó PETEX_Petición de examen sustantivo
Pagos:
13/07/2022 - Pago Tasas IET
Fuente de la información
Parte de la información aquí publicada es pública puesto que ha sido obtenida de la Oficina de Propiedad Industrial de los diferentes países el 29/04/2024 y por lo tanto puede ser que la información no esté actualizada.Parte de la información aquí mostrada ha sido calculada por nuestro sistema informático y puede no ser veraz.
Privacidad
Si considera que al información aquí publicada afecta a su privacidad y desea que eliminemos la información aquí publicada envíe un email a info@patentes-y-marcas.com o rellene el formulario que encontrará aquí.Información sobre el registro de patente nacional por SISTEMA AÉREO NO TRIPULADO DE ENTREGA Y RETIRADA DE PRODUCTOS DE FORMA AUTÓNOMA con el número P202230642
El registro de patente nacional por SISTEMA AÉREO NO TRIPULADO DE ENTREGA Y RETIRADA DE PRODUCTOS DE FORMA AUTÓNOMA con el número P202230642 fue solicitada el 13/07/2022. Se trata de un registro en España por lo que este registro no ofrece protección en el resto de países. El registro SISTEMA AÉREO NO TRIPULADO DE ENTREGA Y RETIRADA DE PRODUCTOS DE FORMA AUTÓNOMA con el número P202230642 fue solicitada por PEDRO GENOVÉS RAMIREZ mediante los servicios del agente José Luis Lahidalga de Careaga. El registro [modality] por SISTEMA AÉREO NO TRIPULADO DE ENTREGA Y RETIRADA DE PRODUCTOS DE FORMA AUTÓNOMA con el número P202230642 está clasificado como G06Q 10/08,B64D 1/08,B64D 1/22,B64F 1/32,B64U 70/90,A47G 29/14,B65G 57/30,B65G 59/06,B65D 1/34,B65D 43/02,B64U 101/64 según la clasificación internacional de patentes.
Otras invenciones solicitadas en la clasificación internacional de patentes G06Q 10/08,B64D 1/08,B64D 1/22,B64F 1/32,B64U 70/90,A47G 29/14,B65G 57/30,B65G 59/06,B65D 1/34,B65D 43/02,B64U 101/64.
Es posible conocer invenciones similares al campo de la técnica se refiere. El registro de patente nacional por SISTEMA AÉREO NO TRIPULADO DE ENTREGA Y RETIRADA DE PRODUCTOS DE FORMA AUTÓNOMA con el número P202230642 está clasificado con la clasificación G06Q 10/08,B64D 1/08,B64D 1/22,B64F 1/32,B64U 70/90,A47G 29/14,B65G 57/30,B65G 59/06,B65D 1/34,B65D 43/02,B64U 101/64 por lo que si se desea conocer más registros con la clasificación G06Q 10/08,B64D 1/08,B64D 1/22,B64F 1/32,B64U 70/90,A47G 29/14,B65G 57/30,B65G 59/06,B65D 1/34,B65D 43/02,B64U 101/64 clicar aquí.Otras invenciones solicitadas a través del representante JOSÉ LUIS LAHIDALGA DE CAREAGA
Es posible conocer todas las invenciones solicitadas a través del agente JOSÉ LUIS LAHIDALGA DE CAREAGA entre las que se encuentra el registro patente nacional por SISTEMA AÉREO NO TRIPULADO DE ENTREGA Y RETIRADA DE PRODUCTOS DE FORMA AUTÓNOMA con el número P202230642. Si se desean conocer más invenciones solicitadas a través del agente JOSÉ LUIS LAHIDALGA DE CAREAGA clicar aquí.Patentes en España
Es posible conocer todas las invenciones publicadas en España entre las que se encuentra el registro patente nacional por SISTEMA AÉREO NO TRIPULADO DE ENTREGA Y RETIRADA DE PRODUCTOS DE FORMA AUTÓNOMA. Nuestro portal www.patentes-y-marcas.com ofrece acceso a las publicaciones de patentes en España. Conocer las patentes registradas en un país es importante para saber las posibilidades de fabricar, vender o explotar una invención en España.Patentes registradas en la clase G
Es posible conocer todas las patentes registradas en la clase G (FISICA) entre las que se encuentra la patente SISTEMA AÉREO NO TRIPULADO DE ENTREGA Y RETIRADA DE PRODUCTOS DE FORMA AUTÓNOMA con el número P202230642. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase G06
Es posible conocer todas las patentes registradas en la clase G06 (COMPUTO; CALCULO; CONTEO) entre las que se encuentra la patente SISTEMA AÉREO NO TRIPULADO DE ENTREGA Y RETIRADA DE PRODUCTOS DE FORMA AUTÓNOMA con el número P202230642. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase G06Q
Es posible conocer todas las patentes registradas en la clase G06Q (METODOS O SISTEMAS DE PROCESAMIENTO DE DATOS ESPECIALMENTE ADAPTADOS PARA FINES ADMINISTRATIVOS, COM) entre las que se encuentra la patente SISTEMA AÉREO NO TRIPULADO DE ENTREGA Y RETIRADA DE PRODUCTOS DE FORMA AUTÓNOMA con el número P202230642. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase B
Es posible conocer todas las patentes registradas en la clase B (TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTE ) entre las que se encuentra la patente SISTEMA AÉREO NO TRIPULADO DE ENTREGA Y RETIRADA DE PRODUCTOS DE FORMA AUTÓNOMA con el número P202230642. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase B64
Es posible conocer todas las patentes registradas en la clase B64 (AERONAVES; AVIACION; ASTRONAUTICA) entre las que se encuentra la patente SISTEMA AÉREO NO TRIPULADO DE ENTREGA Y RETIRADA DE PRODUCTOS DE FORMA AUTÓNOMA con el número P202230642. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase B64D
Es posible conocer todas las patentes registradas en la clase B64D (EQUIPAMIENTO INTERIOR O ACOPLABLE A AERONAVES; TRAJES DE VUELO; PARACAIDAS; DISPOSICIONES O MONTAJE ) entre las que se encuentra la patente SISTEMA AÉREO NO TRIPULADO DE ENTREGA Y RETIRADA DE PRODUCTOS DE FORMA AUTÓNOMA con el número P202230642. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase B64F
Es posible conocer todas las patentes registradas en la clase B64F (INSTALACIONES EN TIERRA O INSTALACIONES EN CUBIERTA DE PORTAAVIONES ESPECIALMENTE ADAPTADAS PARA SU ) entre las que se encuentra la patente SISTEMA AÉREO NO TRIPULADO DE ENTREGA Y RETIRADA DE PRODUCTOS DE FORMA AUTÓNOMA con el número P202230642. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase B64U
Es posible conocer todas las patentes registradas en la clase B64U () entre las que se encuentra la patente SISTEMA AÉREO NO TRIPULADO DE ENTREGA Y RETIRADA DE PRODUCTOS DE FORMA AUTÓNOMA con el número P202230642. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase A
Es posible conocer todas las patentes registradas en la clase A (NECESIDADES CORRIENTES DE LA VIDA) entre las que se encuentra la patente SISTEMA AÉREO NO TRIPULADO DE ENTREGA Y RETIRADA DE PRODUCTOS DE FORMA AUTÓNOMA con el número P202230642. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase A47
Es posible conocer todas las patentes registradas en la clase A47 (MOBILIARIO; ARTICULOS O APARATOS DE USO DOMESTICO; MOLINILLOS DE CAFE; MOLINILLOS DE ESPECIAS; ASPIR) entre las que se encuentra la patente SISTEMA AÉREO NO TRIPULADO DE ENTREGA Y RETIRADA DE PRODUCTOS DE FORMA AUTÓNOMA con el número P202230642. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase A47G
Es posible conocer todas las patentes registradas en la clase A47G (UTENSILIOS DE USO DOMESTICO O DE MESA) entre las que se encuentra la patente SISTEMA AÉREO NO TRIPULADO DE ENTREGA Y RETIRADA DE PRODUCTOS DE FORMA AUTÓNOMA con el número P202230642. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase B65
Es posible conocer todas las patentes registradas en la clase B65 (TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES) entre las que se encuentra la patente SISTEMA AÉREO NO TRIPULADO DE ENTREGA Y RETIRADA DE PRODUCTOS DE FORMA AUTÓNOMA con el número P202230642. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase B65G
Es posible conocer todas las patentes registradas en la clase B65G (DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRA) entre las que se encuentra la patente SISTEMA AÉREO NO TRIPULADO DE ENTREGA Y RETIRADA DE PRODUCTOS DE FORMA AUTÓNOMA con el número P202230642. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase B65D
Es posible conocer todas las patentes registradas en la clase B65D (RECIPIENTES PARA EL ALMACENAMIENTO O EL TRANSPORTE DE OBJETOS O MATERIALES, p. ej. SACOS, BARRILES, ) entre las que se encuentra la patente SISTEMA AÉREO NO TRIPULADO DE ENTREGA Y RETIRADA DE PRODUCTOS DE FORMA AUTÓNOMA con el número P202230642. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.
¿Tienes alguna duda?
Escribe tu consulta y te responderemos rápida y gratuitamente.

Otras patentes similares
 P202230641
P202230641
 P202230645
P202230645Profesionales Recomendados
Barcelona
933182440
España
933182440
España

Barcelona
+34 93 362 16 97
España
+34 93 362 16 97
España

Barcelona
932 593 600
España
932 593 600
España







