


- Home /
- Publicaciones de patentes /
- CONVERTIDOR DE PAR INERCIAL Y MECANISMO DE TRANSMISIÓN VARIABLE CONTINUA
Patente nacional por "CONVERTIDOR DE PAR INERCIAL Y MECANISMO DE TRANSMISIÓN VARIABLE CONTINUA"
Este registro ha sido solicitado por
Persona física
a través del representanteYAHEL CONTRERAS PÉREZ
Contacto
- Estado: Vigente
- País:
- España
- Fecha solicitud:
- 13/07/2022
- Número solicitud:
-
P202230645
- Número publicación:
-
ES2958386
- Fecha de concesión:
-
- Inventores:
-
Persona física
- Datos del titular:
-
Persona física
- Datos del representante:
-
Yahel Contreras Pérez
- Clasificación Internacional de Patentes:
- F16H 33/18
- Clasificación Internacional de Patentes de la publicación:
- F16H 33/18
- Fecha de vencimiento:
Quiero registrar una patente

Reivindicaciones:
+ ES-2958386_A11. Convertidor de par (100) para la transmisión de potencia entre un eje de accionamiento (1) y un eje accionado (6) dispuestos para girar respecto a una bancada (20) , comprendiendo el convertidor de par (100) : - por lo menos un grupo de engranajes satélites (2) , presentando cada engranaje satélite (2) una masa excéntrica (16) ; - por lo menos un elemento porta-satélite (15) solidario del eje de accionamiento (1) que soporta de manera giratoria dicho grupo de engranajes satélites (2) ; - por lo menos un engranaje planetario (3) que engrana con dichos engranajes del grupo de engranajes satélites (2) ; - una primera rueda libre (RO) asociada al engranaje planetario (3) y al eje accionado (6) ; y - una segunda rueda libre (RS) asociada al engranaje planetario (3) estando configuradas las ruedas libres (RO, RS) para girar libremente en un sentido y transmitir potencia en sentido contrario, estando adaptada la primera rueda libre (RO) para: - conectar permanentemente el engranaje planetario (3) y el eje accionado (6) permitiendo un régimen de funcionamiento sincronizado en el que la velocidad del eje de accionamiento (1) y la velocidad del eje accionado (6) son iguales, y - engranar alternativamente con la segunda rueda libre (RS) permitiendo un régimen de funcionamiento no sincronizado en el que la velocidad del eje accionado (6) es menor que la velocidad del eje de accionamiento (1) siendo el par del eje accionado (6) mayor que el par del eje de accionamiento (1) . 2. Convertidor de par (100) de acuerdo con la reivindicación 1, caracterizado por el hecho de que incluye una tercera rueda libre (RB) configurada para girar libremente en un sentido y transmitir potencia en sentido contrario, y para conectar el eje de accionamiento (1) y el eje accionado (6) impidiendo que el eje accionado (6) gire a mayor velocidad que el eje de accionamiento (1) . 3. Convertidor de par (100) de acuerdo con la reivindicación 1º 2, caracterizado por el hecho de que la segunda rueda libre (RS) conecta el engranaje planetario (3) y la bancada (20) . 4. Convertidor de par (100) de acuerdo con la reivindicación 1º 2, caracterizado por el hecho de que incluye un primer engranaje inversor (4) solidario de la segunda rueda libre (RS) el cual engrana con un segundo engranaje inversor (5) que, a su vez, engrana con un engranaje (6a) solidario del eje accionado (6) . 5. Convertidor de par (100) de acuerdo con la reivindicación 1º 2, caracterizado por el hecho de que comprende un tercer engranaje inversor (7) coaxial con el segundo engranaje inversor (5) el cual engrana con un cuarto engranaje inversor (8) que, a su vez, engrana con un quinto engranaje inversor (10) solidario del eje accionado (6) . 6. Convertidor de par (100) de acuerdo con cualquiera de las reivindicaciones anteriores, caracterizado por el hecho de que incluye un mecanismo para modificar la velocidad del engranaje planetario (3) que comprende un engranaje de accionamiento (9) solidario del eje de accionamiento (1) y un engranaje accionado (13) conectado al engranaje planetario (3) a través de una cuarta rueda libre (RS) , disponiéndose un eje de cambio (17) provisto de un primer engranaje de cambio (11) solidario de dicho eje de cambio (17) y que engrana con el engranaje de accionamiento (9) a través de un sexto engranaje inversor (22) y un segundo engranaje de cambio (12) solidario del eje de cambio (17) y que engrana con el engranaje accionado (13) . 7. Convertidor de par (100) de acuerdo con cualquiera de las reivindicaciones anteriores, caracterizado por el hecho de que cada grupo de engranajes satélites comprende cuatro engranajes satélites (2) . 8. Convertidor de par (100) de acuerdo con la reivindicación 6 o 7, caracterizado por el hecho de que comprende un engranaje planetario adicional (19) solidario del eje accionado (6) que engrana con un grupo adicional de engranajes satélites (21) los cuales, a su vez, engranan con una corona dentada (14) que, a su vez, engrana con el segundo engranaje de cambio (12) . 9. Convertidor de par (100) de acuerdo la reivindicación 8, caracterizado por el hecho de que la corona dentada (14) está conectada, a través de la cuarta rueda libre (RS) , a un elemento porta-satélite (18) solidario del eje de accionamiento (1) que soporta de manera giratoria el grupo adicional de engranajes satélites (21) . 10. Mecanismo de transmisión variable continua que comprende por lo menos un convertidor de par (100) de acuerdo con cualquiera de las reivindicaciones anteriores conectado al eje accionado (6) del mismo. 11. Mecanismo de acuerdo la reivindicación 10, caracterizado por el hecho de que comprende por lo menos dos convertidores de par (100) en el que la masa excéntrica (16) de un grupo de engranajes satélites (2) está desfasada angularmente 180° respecto a la masa excéntrica (16) de un grupo de engranajes satélites (2) contiguo. 12. Mecanismo de acuerdo la reivindicación 11, caracterizado por el hecho de que comprende medios elásticos que conectan engranajes planetarios contiguos (3, 3) para mantener el desfase angular de la masa excéntrica (16) de correspondientes grupos de engranajes satélites contiguos (2, 2) . 13. Mecanismo de acuerdo con cualquiera de las reivindicaciones 10-12, caracterizado por el hecho de que incluye un sistema de transmisión variable (30) conectado al eje accionado (6) .
Los productos y servicios protegidos por este registro son:
F16H 33/18
Descripciones:
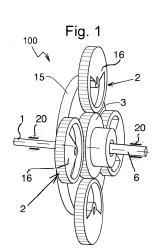
+ ES-2958386_A1 Se describe, a continuación, un convertidor de par para la transmisión de potencia entre un eje de accionamiento y un eje accionado dispuestos para girar respecto a una bancada. El presente convertidor de par comprende por lo menos un grupo de engranajes satélites. Cada grupo de engranajes satélites comprende una pluralidad de engranajes satélites, cada uno de los cuales presenta una masa excéntrica. Por lo tanto, el centro de masas de un engranaje satélite no coincide con el centro geométrico del engranaje satélite. En un ejemplo no limitativo, cada grupo de engranajes satélites comprende cuatro engranajes satélites. Sin embargo, éste puede comprender un número distinto de engranajes satélites en función de los requerimientos. Las fuerzas inerciales generadas por la excentricidad de la masa de los engranajes satélites permiten transmitir adecuadamente el par al eje accionado. El convertidor de par que se describe comprende también por lo menos un engranaje planetario que engrana con los engranajes satélites y por lo menos un elemento porta-satélite que es solidario del eje de accionamiento y que soporta de manera giratoria dicho grupo de engranajes satélites. En esta descripción, la referencia a un elemento solidario incluye la unión directa de dicho elemento a otro elemento, la formación de dicho elemento a otro elemento como una sola pieza, o la unión indirecta de dicho elemento a otro elemento, por ejemplo, a través de otros elementos. El presente convertidor de par comprende también una primera rueda libre asociada al engranaje planetario y al eje accionado, y una segunda rueda libre asociada al engranaje planetario. La segunda rueda libre puede conectar el engranaje planetario y la bancada. Ambas ruedas libres están configuradas para girar libremente en un sentido y transmitir potencia en sentido contrario. La primera rueda libre está adaptada para conectar permanentemente el engranaje planetario y el eje accionado permitiendo un régimen de funcionamiento sincronizado en el que la elocidad del eje de accionamiento y la velocidad del eje accionado son iguales, y engranar alternativamente con la segunda rueda libre permitiendo un régimen de funcionamiento no sincronizado en el que la velocidad del eje accionado es menor que la velocidad del eje de accionamiento siendo el par del eje accionado mayor que el par del eje de accionamiento. Opcionalmente, puede disponerse una tercera rueda libre también configurada para girar libremente en un sentido y transmitir potencia en sentido contrario. Dicha tercera rueda libre está configurada para conectar el eje de accionamiento y el eje accionado impidiendo que el eje accionado gire a mayor velocidad que el eje de accionamiento. En algunos ejemplos, el presente convertidor de par puede incluir un primer engranaje inversor solidario de la segunda rueda libre. Dicho primer engranaje inversor engrana con un segundo engranaje inversor que, a su vez, engrana con un engranaje solidario del eje accionado. Puede disponerse un tercer engranaje inversor, coaxial con dicho segundo engranaje inversor, que engrane con un cuarto engranaje inversor. Dicho cuarto engranaje inversor engrana, a su vez, con un quinto engranaje inversor solidario del eje accionado. También se prevé que pueda incorporarse un mecanismo para modificar la velocidad del engranaje planetario. Si se incluye, dicho mecanismo para modificar la velocidad del engranaje planetario comprende un engranaje de accionamiento solidario del eje de accionamiento y un engranaje accionado conectado al engranaje planetario a través de una cuarta rueda libre. Dicho mecanismo para modificar la velocidad del engranaje planetario incluye también un eje de cambio provisto de un primer engranaje de cambio solidario de dicho eje de cambio y que engrana con dicho engranaje de accionamiento a través de un sexto engranaje inversor y un segundo engranaje de cambio solidario del eje de cambio y que engrana con el engranaje accionado. Se contempla también el caso en que el convertidor de par comprende un engranaje planetario adicional solidario del eje accionado que engrana con un grupo adicional de engranajes satélites. El grupo adicional de engranajes satélites engranan con una corona dentada que, a su vez, engrana con el citado segundo engranaje de cambio. Dicha corona dentada puede estar conectada, a través dicha cuarta rueda libre, a un elemento porta-satélite que es solidario del eje de accionamiento y que soporta de manera giratoria el grupo adicional de engranajes satélites. Se describe también un mecanismo de transmisión variable continua que comprende por lo menos un convertidor de par como el descrito anteriormente conectado al eje accionado del mismo. Dicho mecanismo de transmisión variable continua puede comprender una pluralidad de convertidores de par, por ejemplo, dos o más. En este caso, la masa excéntrica de un grupo de engranajes satélites estaría desfasada angularmente 180° respecto a la masa excéntrica de un grupo de engranajes satélites contiguo. En dicho mecanismo de transmisión variable continua pueden incorporarse medios elásticos para conectar engranajes planetarios contiguos de modo que se mantenga el citado desfase angular de la masa excéntrica de correspondientes grupos de engranajes satélites contiguos. El mecanismo de transmisión variable continua puede conectarse a un sistema de transmisión variable conectado al eje accionado. Con un mecanismo de transmisión como el descrito, que incluye el citado convertidor de par basado en un sistema inercial y ruedas libres que transmiten par en un sentido, es posible regular automáticamente y de manera efectiva la relación de transmisión entre un eje de accionamiento y un eje accionado en función de la velocidad y el par aplicados a ellos, de modo que sus velocidades se sincronizan de manera automática sin el uso de un embrague. Al tratarse de un sistema mecánico, se evitan pérdidas asociadas al movimiento de un fluido, como ocurre con los convertidores hidrodinámicos conocidos. Con el mecanismo de transmisión descrito, se mejora el rendimiento, se reducen las dimensiones, y también los costes. Además, en el presente convertidor de par, una sobrecarga no frenará el eje de accionamiento, aumentando el rendimiento y la durabilidad del motor. El presente convertidor de par puede aplicarse en infinidad de escenarios, por ejemplo, para modificar la respuesta de motores eléctricos de inducción y, en general, en escenarios donde los convertidores hidrodinámicos no son aplicables debido a las dimensiones o el coste. Otras ventajas y características de realizaciones del presente mecanismo de transmisión se pondrán de manifiesto para el experto en la materia a partir de la siguiente descripción de ejemplos, o podrán derivarse al poner en práctica la descripción. Breve descripción de los dibujos A continuación, se describirán unos ejemplos particulares no limitativos del presente mecanismo de transmisión, con referencia a los dibujos adjuntos. En los dibujos: La figura 1 es una vista esquemática en perspectiva de un primer ejemplo del presente convertidor de par en una configuración básica; La figura 2 es una vista en alzado en sección del primer ejemplo del convertidor de par de la figura 1; La figura 3 es una vista esquemática en perspectiva de despiece de un segundo ejemplo del presente convertidor de par, en una configuración en que se incluye un mecanismo inversor; La figura 4 es una vista frontal del segundo ejemplo del presente convertidor de par de la figura 3; La figura 5 es una vista en alzado en sección del segundo ejemplo del convertidor de par de las figuras 3 y 4; La figura 6 es una vista esquemática en perspectiva de despiece de un tercer ejemplo del presente convertidor de par en una configuración en que se dispone un mecanismo inversor; La figura 7 es una vista en alzado en sección del tercer ejemplo del convertidor de par de la figura 6; La figura 8 es una vista esquemática en perspectiva de despiece de un cuarto ejemplo del presente convertidor de par en una configuración en que se disponen engranajes de cambio para variar la relación de cambio; La figura 9 es una vista en alzado en sección del cuarto ejemplo del convertidor de par de la figura 8; La figura 10 es una vista esquemática en perspectiva de despiece de un quinto ejemplo del presente convertidor de par en una configuración en que se utiliza un segundo grupo de engranajes satélites; La figura 11 es una vista en alzado en sección del quinto ejemplo del convertidor de par de la figura 10; La figura 12 es una vista esquemática en perspectiva de despiece de un sexto ejemplo del presente convertidor de par en una configuración en que se utilizan dos grupos de engranajes satélites contiguos; La figura 13 es una vista en alzado en sección del sexto ejemplo del convertidor de par de la figura 12; La figura 14 es una vista esquemática en perspectiva de despiece de un mecanismo de transmisión que comprende tres convertidores de par conectados entre sí, de acuerdo con el segundo ejemplo de la figura 3; La figura 15 es una vista esquemática en perspectiva de un divisor de potencia destinado a conectarse al convertidor de par de las figuras 1 y 2; La figura 16 es una vista esquemática en perspectiva de despiece de un ejemplo de un convertidor de par conectado a un mecanismo de transmisión continuamente variable de polea y cadena; La figura 17 es una vista esquemática en perspectiva de despiece de una variante del tercer ejemplo del convertidor de par representado en la figura 6 donde los engranajes inversores se han sustituido por un mecanismo de transmisión continuamente variable de polea y cadena como el del ejemplo ilustrado en la figura 16; La figura 18 es una vista frontal de un séptimo ejemplo del presente convertidor de par; La figura 19 es una vista en alzado en sección del séptimo ejemplo del convertidor de par; La figura 20 es una gráfica que muestra la respuesta del eje accionado a la aplicación de una curva de par/velocidad angular al eje de accionamiento en el convertidor de par; Las figuras 21a, 21b y 21c muestran esquemáticamente parámetros relacionados con la mecánica del presente convertidor de par que permiten apreciar la influencia de la excentricidad del centro de masas de los engranajes satélites; La figura 22 ilustra esquemáticamente regiones de funcionamiento en rotación del convertidor de par para un régimen no sincronizado en que la velocidad del eje accionado no es nula; La figura 23 es una gráfica que muestra el par de entrada y el par de salida frente a la excentricidad del centro de masas del engranaje satélite; y La figura 24 es una gráfica que muestra el par de entrada y el par de salida y frente al tiempo del ciclo de funcionamiento en rotación del convertidor de par. Descripción detallada de ejemplos Los ejemplos no limitativos que se describen a continuación y se ilustran en las figuras de los dibujos corresponden a mecanismos mecánicos para la transmisión de potencia de una fuente de movimiento angular que proviene de un eje de accionamiento 1 a un eje accionado 6 que trabajan a una velocidad y a un par diferentes. El eje de accionamiento 1 y el eje accionado están dispuestos para girar respecto a una bancada 20, por ejemplo, de un motor de un vehículo. En los ejemplos que se describen de acuerdo con las figuras, los mecanismos de transmisión comprenden un convertidor de par de tipo inercial, designado en conjunto por la referencia 100 en las figuras. De manera general para los ejemplos descritos, el eje de accionamiento 1 es solidario de un elemento porta-satélite 15 que soporta de manera giratoria un grupo de engranajes satélites 2, tal como cuatro en el ejemplo de las figuras que se incluyen en los dibujos. Cada engranaje satélite 2 incorpora una masa excéntrica 16 de manera que, como se ilustra en la figura 4, el centro de masas 16a de cada engranaje satélite 2 no coincide con el centro del mismo, sino que está desplazado un ángulo de excentricidad a representado en la figura 4 de los dibujos. Cuando el convertidor de par 100 trabaja de acuerdo con un régimen de funcionamiento sincronizado en el que la velocidad angular del eje de accionamiento 1 es igual que la velocidad angular del eje accionado 6, el ángulo de excentricidad a definido entre el eje de accionamiento 1 y el centro de masas 16a del engranaje satélite 2 tiene un valor constante comprendido entre 0° y 180°. Cuando el convertidor de par 100 trabaja de acuerdo con un régimen de funcionamiento no sincronizado en el que la velocidad angular del eje de accionamiento 1 y la del eje accionado 6 no son iguales, dicho ángulo de excentricidad a varía entre 0° y 360°. Los engranajes satélites 2 engranan con un engranaje planetario 3. El engranaje planetario 3 está conectado al eje accionado 6 mediante una primera rueda libre RO. Se dispone también una segunda rueda libre RS que gira en sentido contrario a la primera rueda libre RO y que conecta el engranaje planetario 3 a una bancada 20. La primera rueda libre RO y la segunda rueda libre RS están configuradas para girar libremente en un sentido y transmitir potencia en sentido contrario. La primera rueda libre RO está adaptada para conectar permanentemente el engranaje planetario 3 y el eje accionado 6 permitiendo un régimen de funcionamiento sincronizado en el que la velocidad del eje de accionamiento 1 y la velocidad del eje accionado 6 son iguales, y engranar alternativamente con la segunda rueda libre RS permitiendo un régimen de funcionamiento no sincronizado en el que la velocidad del eje accionado 6 es menor que la velocidad del eje de accionamiento 1 y el par del eje accionado 6 es mayor que el par del eje de accionamiento 1. En las figuras 1 y 2 se muestra un primer ejemplo particular del presente convertidor de par 100 en una configuración básica que comprende un grupo de cuatro engranajes satélites 2, cada uno con una masa excéntrica 16, soportados de manera giratoria por un elemento portasatélite 15 que es solidario del eje de accionamiento 1. Los engranajes satélites 2 engranan con un engranaje planetario 3 conectado al eje accionado 6 a través de la primera rueda libre RO y conectado a la bancada 20 a través de la segunda rueda libre RS. Tal como se ha indicado anteriormente, las ruedas libres RO, RS pueden girar libremente en un sentido, mientras que, en sentido contrario, dichas ruedas libres RO, RS transmiten par. La primera rueda libre RO permite conectar permanentemente el engranaje planetario 3 y el eje accionado 6 permitiendo un régimen de funcionamiento sincronizado en el que la velocidad del eje de accionamiento 1 y la velocidad del eje accionado 6 son iguales, y engranar alternativamente con la segunda rueda libre RS permitiendo un régimen de funcionamiento no sincronizado en el que la velocidad del eje accionado 6 es menor que la velocidad del eje de accionamiento 1, siendo el par del eje accionado 6 mayor que el par del eje de accionamiento 1. Se hace referencia ahora a las figuras 21a-21c a 24. De acuerdo con la figura 21a, la aceleración del centro de masas 16a se descompone en una parte debida al movimiento del eje de accionamiento 1 y una parte debida a la rotación del engranaje satélite 2. En particular, la velocidad angular 02 del engranaje satélite 2 puede determinarse como: 02 = 01 (1+R/r) - 03 ^R/r, en el que: 01 es la velocidad angular del eje de accionamiento 1 ; 03 es la velocidad angular del engranaje planetario 3; R es el radio del engranaje planetario 3; y res el radio del engranaje satélite 2. En el funcionamiento sincronizado, cuando la velocidad angular del eje de accionamiento 1 y del eje accionado 6 son iguales, la primera rueda libre RO está conectada, es decir, transmite par. El ángulo a tiene un valor constante entre 0 y 180°. En este caso la velocidad angular 02 del engranaje satélite 2 es igual que la velocidad angular 01 del eje de accionamiento 1. Analizando las fuerzas inerciales que actúan sobre el engranaje satélite 2, con un equilibrio de momento angular respecto a su eje, se tiene que: FD-r = m- (R+r) -ra2i5-e-sin a en el que: Fd es la fuerza que transmite el engranaje satélite 2 al engranaje planetario 3; e es la excentricidad del centro de masas 16a del engranaje satélite 2; a es el ángulo de excentricidad entre el eje de accionamiento 1 y el centro de masas 16a del engranaje satélite 2; R es el radio del engranaje planetario 3; r es el radio del engranaje satélite 2; y 015 es la velocidad angular del elemento porta-satélites 15, que corresponde a la velocidad angular del eje de accionamiento 1. Por lo tanto, el par Md que transmite el engranaje satélite 2 al engranaje planetario 3 para una velocidad angular de accionamiento 015 del elemento porta-satélites 15 determinada es: Md = R /r (R +r) -o215-e-sin a. Se aprecia, por lo tanto, que la excentricidad e de los engranajes satélites 2 es clave para poder transmitir el par al eje accionado 6. En el funcionamiento no sincronizado, cuando la velocidad angular 01 del eje de accionamiento 1, que corresponde a la velocidad angular 015 del elemento porta-satélites 15, es mayor que la velocidad angular 03 del eje de eje accionado 6, el ángulo a varía de acuerdo con la expresión: da/dt = (01.- 03) R/r. Si, en dicho funcionamiento no sincronizado, la velocidad angular 03 y la velocidad lineal del punto de contacto entre el engranaje planetario 3 y el engranaje satélite 2 son iguales, cuando el ángulo a es menor de 180°, el par Md = Fd R se transmite al eje accionado 6 a partir de la primera rueda libre RO. Si el ángulo a es mayor de 180°, el signo de la fuerza Fd varía y la segunda rueda libre RS se conecta, es decir, transmite par al eje accionado 6. Se hace referencia ahora a las gráficas de las figuras 23 y 24 que muestran, en línea continua, el par de entrada y, en línea discontinua, el par de salida cuando la velocidad del eje accionado 6 es la mitad de la velocidad del eje de accionamiento 1. En la figura 23, el eje de abscisas corresponde al valor del ángulo a en radianes y en la figura 24 corresponde el tiempo del ciclo, siendo x el tiempo total del ciclo. En el funcionamiento no sincronizado, si la velocidad angular 03 del engranaje planetario 3 no es nula, se determinan cuatro regiones de funcionamiento en rotación según los puntos A, B, D, E representados en la figura 22. Dos regiones de funcionamiento corresponden al caso en que ni la primera rueda libre RO ni la segunda rueda libre RS están conectadas, lo cual ocurre cuando el centro de masas 16a se encuentra en la región de funcionamiento del punto A a B y en la región de funcionamiento del punto D a E, otra región de funcionamiento del punto B a D, cuando la primera rueda libre RO está conectada, es decir, transmite par, y otra región de funcionamiento del punto E a A cuando la segunda rueda libre RS está conectada, es decir, transmite par. Partiendo de la posición de acuerdo con el punto A, la segunda rueda libre RS está conectada, es decir, transmite par, de manera que, en la configuración de la figura 1, la velocidad angular en el punto D es 0 y, en la configuración de la figura 3 o 6, la velocidad angular en el punto D es igual a la velocidad angular del engranaje 4. Entre el punto A y el punto B, la fuerza inercial provoca un aumento de la velocidad del punto D y, por lo tanto, un aumento de la velocidad angular 03 del engranaje planetario 3. Cuando la velocidad angular 03 del engranaje planetario 3 es igual a la velocidad angular del eje accionado 6 (punto B) , la primera rueda libre RO se conecta de modo que transmite par de acuerdo con la expresión indicada anteriormente Md = R/r (R+r) o2i5 e sin a. Cuando el centro de masas 16a sobrepasa el punto D, la fuerza inercial tiende a reducir la velocidad del punto D, la primera rueda libre RO se desconecta, es decir, gira libremente, y el convertidor de par 100 reduce su velocidad hasta que la velocidad del punto D es cero o igual a la velocidad del engranaje 4, tal como se ha indicado anteriormente (punto E) . Entre el punto E y el punto A, la segunda rueda libre RS se conecta transmitiendo par. Tal como puede apreciarse en la figura 24, el tiempo en la región de funcionamiento del punto B al punto D es mayor que el tiempo en las otras regiones de funcionamiento. Este tiempo, durante el cual la primera rueda libre RO está conectada, aumenta a medida que la velocidad del eje accionado 6 tiende a la velocidad del eje de accionamiento 1. Cuando la diferencia de velocidades tiende a cero, el tiempo en esta región tiende a infinito y el convertidor de par 100 funciona en un régimen sincronizado. Volviendo al primer ejemplo del presente convertidor de par 100 de las figuras 1 y 2, se incluye también una tercera rueda libre RB, igualmente configurada para girar libremente en un sentido y transmitir potencia en sentido contrario. La tercera rueda libre RB permite conectar el eje de accionamiento 1 y el eje accionado 6 impidiendo que el eje accionado 6 gire a mayor velocidad que el eje de accionamiento 1. Se puede hacer uso, en este caso, del freno motor. En las figuras 3-5 se muestra un segundo ejemplo del presente convertidor de par 100 en una configuración en que se incluye un mecanismo inversor 4-5. Este segundo ejemplo del presente convertidor de par 100 presenta una configuración equivalente a la configuración del primer ejemplo del presente convertidor de par 100 de las figuras 1 y 2 con la adición de dicho mecanismo inversor 4-5 constituido por un primer engranaje inversor 4, que es solidario de la segunda rueda libre RS y un segundo engranaje inversor 5 que engrana con el primer engranaje inversor 4. El segundo engranaje inversor 5, a su vez, engrana con un engranaje 6a que es solidario del eje accionado 6. Pueden conectarse entre sí diversos convertidores de par 100, por ejemplo, tres convertidores de par 100 de acuerdo con el segundo ejemplo, tal como se ha ilustrado en la figura 14. En este caso, el eje de accionamiento 1 lleva montados solidarios unos engranajes de accionamiento 45, 45, 45" que engranan con correspondientes elementos porta-satélites 15, 15', 15". Cada elemento porta-satélites 15, 15', 15" mueve un grupo de cuatro engranajes satélites 2, 2, 2" con una masa excéntrica 16, 16, 16" correspondiente. Los engranajes satélites 2, 2, 2" tienen sus masas 16, 16, 16" desfasadas un ángulo medio de 360°/N siendo N el número de convertidores de par 100, en este ejemplo, tres, tal como se ha indicado anteriormente. Este desfase se mantiene a través de una serie de muelles de torsión, no mostrados, que conectan el engranaje planetario 3 con el engranaje planetario 3, y el engranaje planetario 3 con el engranaje planetario 3". Los engranajes satélites 2, 2, 2" engranan con un engranaje planetario 3, 3, 3" correspondiente. Cada engranaje planetario 3, 3, 3" correspondiente está conectado al eje accionado 6 a través de correspondientes primeras ruedas libres, no mostradas. Se disponen también segundas ruedas libres correspondientes, no mostradas, que giran en sentido contrario a las citadas primeras ruedas libres, que conectan cada engranaje planetario 3, 3, 3" a correspondientes engranajes inversores 4, 4, 4", que engranan con correspondientes engranajes inversores 46, 46, 46" solidarios de un eje inversor 26, tal como se muestra en icha figura 14. En funcionamiento, los engranajes inversores 4, 4, 4" hacen girar el eje accionado 6 a una velocidad proporcional a la del eje inversor 26 por medio del inversor 7-10 formado por los engranajes 7, 8 y 10, equivalente al mecanismo inversor 7-10 del tercer ejemplo que se describe a continuación de acuerdo con las figuras 6 y 7. En dichas figuras 6 y 7 se muestra un tercer ejemplo del presente convertidor de par 100 en una configuración que incluye, además, otro mecanismo inversor 4-5, equivalente al mecanismo inversor 4-5 del segundo ejemplo de las figuras 3-5 de los dibujos. Este tercer ejemplo del presente convertidor de par 100 presenta una configuración equivalente a la configuración del primer ejemplo del presente convertidor de par 100 con la adición de todavía otro mecanismo inversor 7-10 que comprende un tercer engranaje inversor 7 montado solidario del mismo eje 23 donde va montado el segundo engranaje inversor 5, tal como se muestra en la figura 6. El tercer engranaje inversor 7 engrana con un cuarto engranaje inversor 8 que, a su vez, engrana con un quinto engranaje inversor 10 montado solidario del eje accionado 6. Este inversor es equivalente al inversor del ejemplo representado en la figura 14. En las figuras 8 y 9 se muestra un cuarto ejemplo del presente convertidor de par 100. Este cuarto ejemplo del presente convertidor de par 100 presenta una configuración equivalente a la configuración del primer ejemplo del presente convertidor de par 100 con la adición de un mecanismo 24 destinado a obtener una relación de cambio para obtener una velocidad determinada del engranaje planetario 3. En particular, dicho mecanismo 24 comprende un engranaje de accionamiento 9 solidario del eje de accionamiento 1 y un engranaje accionado 13 conectado al engranaje planetario 3 a través de una cuarta rueda libre RS, tal como se muestra en la figura 9. El mecanismo 24 comprende también un eje de cambio 17 en el cual va montado solidario del mismo un engranaje de cambio 11, que engrana con el citado engranaje de accionamiento 9 a través de un engranaje inversor 22. En el eje de cambio 17 va montado, también solidario del mismo, un engranaje de cambio 12 que engrana con el engranaje accionado 13 mencionado anteriormente. Esta configuración permite obtener una relación de velocidades adecuada entre el eje de accionamiento 1 y el engranaje accionado 13. En este caso, la segunda rueda libre RS transmite el movimiento al eje accionado 6 si la relación de velocidades entre el eje de accionamiento 1 y el eje accionado 6 es pequeña. A partir de un determinado valor de dicha relación de velocidades entre el eje de accionamiento 1 y el eje accionado 6, el movimiento se transmite al eje accionado 6 a través de la cuarta rueda libre RS. En las figuras 10 y 11 se muestra un quinto ejemplo del presente convertidor de par 100 en una configuración en que se utiliza un segundo grupo de engranajes satélites 21. Este quinto ejemplo del presente convertidor de par 100 es una variante del cuarto ejemplo anterior representado en las figuras 8 y 9. En este caso, se dispone un engranaje planetario adicional 19 que es solidario del eje accionado 6. El engranaje planetario adicional 19 engrana con dicho segundo grupo de engranajes satélites 21 los cuales, a su vez, engranan con una corona dentada 14. La corona dentada 14 presenta un dentado en su periferia exterior que engrana con el segundo engranaje de cambio 12 mencionado anteriormente para el ejemplo anterior de las figuras 8 y 9, solidario del eje de cambio 17. La corona dentada 14 está conectada, a través de la cuarta rueda libre RS mencionada anteriormente, a otro elemento porta-satélite 18 solidario del eje de accionamiento 1. Este otro elemento porta-satélite 18 soporta de manera giratoria el citado segundo grupo de engranajes satélites 21. Los engranajes satélites 21 engranan con dientes interiores de la corona dentada 14. En un sexto ejemplo del presente convertidor de par 100 que se muestra en las figuras 12 y 13 de los dibujos, se utilizan dos grupos de engranajes satélites 2, 2 dispuestos contiguos entre sí y solidarios del elemento porta-satélite 15. En este ejemplo, la masa excéntrica 16 de un grupo de engranajes satélites 2 está desfasada angularmente 180° respecto a la masa excéntrica 16 de un grupo de engranajes satélites 2 contiguo. Los engranajes satélites 2, 2 engranan con correspondientes engranajes planetarios 3, 3. El engranaje planetario 3 está conectado al eje accionado 6 a través de la primera rueda libre RO, tal como se muestra en la figura 13, y el engranaje planetario 3 está conectado, a través de una quinta rueda libre RO, a un engranaje 5a que engrana con el engranaje inversor 5 montado solidario de un eje inversor 25, tal como se muestra en las figuras 12 y 13. En este sexto ejemplo, en el eje inversor 25 va también montado solidario del mismo un engranaje inversor adicional 5, que engrana con un engranaje inversor 5a correspondiente. En dicho eje inversor 25 va montado también, solidario del mismo, el tercer engranaje inversor 7 que engrana con el cuarto engranaje inversor 8 que, a su vez, engrana con el engranaje inversor 10. En la figura 15 se muestra una vista en perspectiva de un divisor de potencia 27. El divisor de potencia 27 está configurado para conectarse al convertidor de par 100 de cualquier ejemplo de las figuras 1-14 y 16-19 descritas anteriormente. La entrada de potencia al divisor de potencia 27 se realiza por el eje de accionamiento 28, que es solidario de un elemento portasatélite 29. El elemento porta-satélite 29 soporta de manera giratoria un grupo de engranajes atélites 29a. Los engranajes satélites 29a, a su vez, engranan con una corona 29c y con un engranaje planetario 29b. La corona 29c puede conectarse al eje de accionamiento 1 y el engranaje planetario 29b puede conectarse al eje accionado 6. En las figuras 16 y 17 se muestran ejemplos de un convertidor de par 100 conectado a un mecanismo de transmisión continuamente variable (CVT) 31 de polea y cadena. La figura 17 muestra una vista en perspectiva de una variante del tercer ejemplo del convertidor de par 100 ilustrado en las figuras 6 y 7 de los dibujos en la que los engranajes inversores se han sustituido por un CVT 31 de polea y cadena como el ilustrado en la figura 16. En el ejemplo particular de la figura 16, el CVT 31 comprende una primera polea 32 que está montada solidaria de un eje 33 montado giratorio respecto a la bancada 20, y una segunda polea 34 solidaria del eje accionado 6 y, por lo tanto, del engranaje 6a, tal como se muestra en la figura 16. Una cadena de transmisión 35 de longitud constante montada alrededor de la primera polea 32 y la segunda polea 34 permite transmitir el movimiento de giro de una polea a otra y, por lo tanto, al eje accionado 6. En el ejemplo de la figura 17, el CVT 31 comprende una primera polea 32 solidaria del eje inversor 23 donde va montado el engranaje inversor 5 tal como se ha descrito anteriormente para el tercer ejemplo del convertidor de par 100 ilustrado en las figuras 6 y 7 de los dibujos. El eje inversor 23 está montado giratorio respecto a la bancada 20. En dicho ejemplo de la figura 17, el CVT 31 comprende también una segunda polea 34 solidaria del eje accionado 6 asociado al engranaje inversor 4. Se dispone también, en este caso, una cadena de transmisión 35 de longitud constante montada alrededor de la primera polea 32 y la segunda polea 34 para transmitir el movimiento de giro de una polea a otra y, por lo tanto, al eje accionado 6. En ambos ejemplos de las figuras 16 y 17, el diámetro efectivo de la primera polea 32 y la segunda polea 34 varía progresivamente, de manera que, mientras uno aumenta, el otro disminuye, y viceversa. De este modo, se obtiene un CVT 31 con relaciones de transmisión que pueden variar progresivamente dentro de una determinada gama de relaciones posibles. De este modo, el mecanismo permite que un vehículo tenga el motor trabajando en un régimen de revoluciones óptimo a pesar de los cambios de velocidad y par requeridos en las ruedas motrices durante el funcionamiento. Las figuras 18 y 19 muestran todavía un séptimo ejemplo del convertidor de par 100 con dos grupos de engranajes satélites 2 y 2 conectados a través de respectivos elementos portasatélites 15 y 15 que incluyen correspondientes engranajes planetarios 3. Tal como se muestra en la figura 19, el eje de accionamiento 1 mueve un engranaje planetario 42 que engrana con unos engranajes satélites 40 que, a su vez, engranan con una corona 41 fija a la bancada 20. Se dispone también otro conjunto de engranajes satélites 42 que conectan con un engranaje planetario 43 que mueve el elemento porta-satélites 15. Los engranajes satélites 42 engranan también con una corona 44 que puede accionarse para variar el ángulo entre los elementos porta-satélite 15 y 15 y, en consecuencia, modificar la disposición angular de las masas excéntricas 16, 16 de los engranajes satélites 2 y 2. El resto de la configuración del convertidor de par 100 presenta la misma configuración mostrada en el ejemplo de las figuras 3 y 5. La gráfica de la figura 20 representa la respuesta de par T respecto a la velocidad angular w. Al aplicar al eje de accionamiento 1 un par T a una velocidad angular w según una curva A, tal como se muestra en la gráfica de la figura 20, en las configuraciones del convertidor de par 100 de los ejemplos descritos, la respuesta del eje accionado 6 es la ilustrada de acuerdo con la curva B, tal como se muestra en dicha gráfica de la figura 20. El convertidor de par 100 descrito es capaz de funcionar en dos regímenes de funcionamiento claramente diferenciados. El convertidor de par 100 puede funcionar en un régimen de funcionamiento sincronizado, de acuerdo con la zona S de la derecha de la gráfica de la figura 20, en que la velocidad del eje de accionamiento 1 es igual la velocidad del eje accionado 6 y la rueda libre RO conecta permanentemente el engranaje planetario 3 con el eje accionado 6. El convertidor de par 100 puede funcionar también en un régimen de funcionamiento no sincronizado, de acuerdo con la zona DS de la izquierda de la gráfica de la figura 20. En este caso, la primera rueda libre RO y la segunda rueda libre RS engranan alternativamente, y la velocidad del eje accionado 6 es menor que la velocidad del eje de accionamiento 1 siendo el par del eje accionado 6 mayor que el del eje de accionamiento 1, trabajando así como reductor. Los inventores han diseñado un prototipo correspondiente al segundo ejemplo de la figura 3 donde se ha conectado un motor eléctrico de una potencia nominal de 0, 09 KW y una velocidad nominal de 1350 rpm con el que ha comprobado que hay una notable mejora en el rendimiento, una reducción de las dimensiones y de los costes. A pesar de que se han descrito aquí sólo algunos ejemplos particulares de la descripción, el experto en la materia comprenderá que son posibles otras realizaciones alternativas y/o usos, así como modificaciones obvias y elementos equivalentes. Por ejemplo, el elemento portasatélite 15 puede soportar un número diferente de engranajes satélites 2. Por otra parte, aunque se han mostrado mecanismos de transmisión continuamente variable de polea y cadena, cualquier mecanismo de transmisión variable, continua o no, puede conectarse al eje accionado 6. La presente descripción, por lo tanto, abarca todas las posibles combinaciones de las realizaciones concretas que se han descrito. Los signos numéricos relativos a los dibujos y colocados entre paréntesis en una reivindicación son solamente para intentar aumentar la comprensión de la reivindicación, y no deben ser interpretados como limitantes del alcance de la protección de la reivindicación. El alcance de esta descripción no debe limitarse a realizaciones concretas, sino que debe ser determinado únicamente por una lectura apropiada de las reivindicaciones adjuntas.
Publicaciones:
ES2958386 (08/02/2024) - A1 Solicitud de patente con informe sobre el estado de la técnica
Eventos:
En fecha 13/07/2022 se realizó Registro Instancia de Solicitud
En fecha 13/07/2022 se realizó Admisión a Trámite
En fecha 13/07/2022 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 21/07/2022 se realizó Superado examen de oficio
En fecha 27/04/2023 se realizó Realizado IET
En fecha 03/05/2023 se realizó 1109P_Comunicación Traslado del IET
En fecha 08/02/2024 se realizó Publicación Solicitud
En fecha 08/02/2024 se realizó Publicación Folleto Solicitud con IET (A1)
Pagos:
13/07/2022 - Pago Tasas IET
+ ES-2958386_A11. Convertidor de par (100) para la transmisión de potencia entre un eje de accionamiento (1) y un eje accionado (6) dispuestos para girar respecto a una bancada (20) , comprendiendo el convertidor de par (100) : - por lo menos un grupo de engranajes satélites (2) , presentando cada engranaje satélite (2) una masa excéntrica (16) ; - por lo menos un elemento porta-satélite (15) solidario del eje de accionamiento (1) que soporta de manera giratoria dicho grupo de engranajes satélites (2) ; - por lo menos un engranaje planetario (3) que engrana con dichos engranajes del grupo de engranajes satélites (2) ; - una primera rueda libre (RO) asociada al engranaje planetario (3) y al eje accionado (6) ; y - una segunda rueda libre (RS) asociada al engranaje planetario (3) estando configuradas las ruedas libres (RO, RS) para girar libremente en un sentido y transmitir potencia en sentido contrario, estando adaptada la primera rueda libre (RO) para: - conectar permanentemente el engranaje planetario (3) y el eje accionado (6) permitiendo un régimen de funcionamiento sincronizado en el que la velocidad del eje de accionamiento (1) y la velocidad del eje accionado (6) son iguales, y - engranar alternativamente con la segunda rueda libre (RS) permitiendo un régimen de funcionamiento no sincronizado en el que la velocidad del eje accionado (6) es menor que la velocidad del eje de accionamiento (1) siendo el par del eje accionado (6) mayor que el par del eje de accionamiento (1) . 2. Convertidor de par (100) de acuerdo con la reivindicación 1, caracterizado por el hecho de que incluye una tercera rueda libre (RB) configurada para girar libremente en un sentido y transmitir potencia en sentido contrario, y para conectar el eje de accionamiento (1) y el eje accionado (6) impidiendo que el eje accionado (6) gire a mayor velocidad que el eje de accionamiento (1) . 3. Convertidor de par (100) de acuerdo con la reivindicación 1º 2, caracterizado por el hecho de que la segunda rueda libre (RS) conecta el engranaje planetario (3) y la bancada (20) . 4. Convertidor de par (100) de acuerdo con la reivindicación 1º 2, caracterizado por el hecho de que incluye un primer engranaje inversor (4) solidario de la segunda rueda libre (RS) el cual engrana con un segundo engranaje inversor (5) que, a su vez, engrana con un engranaje (6a) solidario del eje accionado (6) . 5. Convertidor de par (100) de acuerdo con la reivindicación 1º 2, caracterizado por el hecho de que comprende un tercer engranaje inversor (7) coaxial con el segundo engranaje inversor (5) el cual engrana con un cuarto engranaje inversor (8) que, a su vez, engrana con un quinto engranaje inversor (10) solidario del eje accionado (6) . 6. Convertidor de par (100) de acuerdo con cualquiera de las reivindicaciones anteriores, caracterizado por el hecho de que incluye un mecanismo para modificar la velocidad del engranaje planetario (3) que comprende un engranaje de accionamiento (9) solidario del eje de accionamiento (1) y un engranaje accionado (13) conectado al engranaje planetario (3) a través de una cuarta rueda libre (RS) , disponiéndose un eje de cambio (17) provisto de un primer engranaje de cambio (11) solidario de dicho eje de cambio (17) y que engrana con el engranaje de accionamiento (9) a través de un sexto engranaje inversor (22) y un segundo engranaje de cambio (12) solidario del eje de cambio (17) y que engrana con el engranaje accionado (13) . 7. Convertidor de par (100) de acuerdo con cualquiera de las reivindicaciones anteriores, caracterizado por el hecho de que cada grupo de engranajes satélites comprende cuatro engranajes satélites (2) . 8. Convertidor de par (100) de acuerdo con la reivindicación 6 o 7, caracterizado por el hecho de que comprende un engranaje planetario adicional (19) solidario del eje accionado (6) que engrana con un grupo adicional de engranajes satélites (21) los cuales, a su vez, engranan con una corona dentada (14) que, a su vez, engrana con el segundo engranaje de cambio (12) . 9. Convertidor de par (100) de acuerdo la reivindicación 8, caracterizado por el hecho de que la corona dentada (14) está conectada, a través de la cuarta rueda libre (RS) , a un elemento porta-satélite (18) solidario del eje de accionamiento (1) que soporta de manera giratoria el grupo adicional de engranajes satélites (21) . 10. Mecanismo de transmisión variable continua que comprende por lo menos un convertidor de par (100) de acuerdo con cualquiera de las reivindicaciones anteriores conectado al eje accionado (6) del mismo. 11. Mecanismo de acuerdo la reivindicación 10, caracterizado por el hecho de que comprende por lo menos dos convertidores de par (100) en el que la masa excéntrica (16) de un grupo de engranajes satélites (2) está desfasada angularmente 180° respecto a la masa excéntrica (16) de un grupo de engranajes satélites (2) contiguo. 12. Mecanismo de acuerdo la reivindicación 11, caracterizado por el hecho de que comprende medios elásticos que conectan engranajes planetarios contiguos (3, 3) para mantener el desfase angular de la masa excéntrica (16) de correspondientes grupos de engranajes satélites contiguos (2, 2) . 13. Mecanismo de acuerdo con cualquiera de las reivindicaciones 10-12, caracterizado por el hecho de que incluye un sistema de transmisión variable (30) conectado al eje accionado (6) .
Los productos y servicios protegidos por este registro son:
F16H 33/18
Descripciones:
+ ES-2958386_A1 Se describe, a continuación, un convertidor de par para la transmisión de potencia entre un eje de accionamiento y un eje accionado dispuestos para girar respecto a una bancada. El presente convertidor de par comprende por lo menos un grupo de engranajes satélites. Cada grupo de engranajes satélites comprende una pluralidad de engranajes satélites, cada uno de los cuales presenta una masa excéntrica. Por lo tanto, el centro de masas de un engranaje satélite no coincide con el centro geométrico del engranaje satélite. En un ejemplo no limitativo, cada grupo de engranajes satélites comprende cuatro engranajes satélites. Sin embargo, éste puede comprender un número distinto de engranajes satélites en función de los requerimientos. Las fuerzas inerciales generadas por la excentricidad de la masa de los engranajes satélites permiten transmitir adecuadamente el par al eje accionado. El convertidor de par que se describe comprende también por lo menos un engranaje planetario que engrana con los engranajes satélites y por lo menos un elemento porta-satélite que es solidario del eje de accionamiento y que soporta de manera giratoria dicho grupo de engranajes satélites. En esta descripción, la referencia a un elemento solidario incluye la unión directa de dicho elemento a otro elemento, la formación de dicho elemento a otro elemento como una sola pieza, o la unión indirecta de dicho elemento a otro elemento, por ejemplo, a través de otros elementos. El presente convertidor de par comprende también una primera rueda libre asociada al engranaje planetario y al eje accionado, y una segunda rueda libre asociada al engranaje planetario. La segunda rueda libre puede conectar el engranaje planetario y la bancada. Ambas ruedas libres están configuradas para girar libremente en un sentido y transmitir potencia en sentido contrario. La primera rueda libre está adaptada para conectar permanentemente el engranaje planetario y el eje accionado permitiendo un régimen de funcionamiento sincronizado en el que la elocidad del eje de accionamiento y la velocidad del eje accionado son iguales, y engranar alternativamente con la segunda rueda libre permitiendo un régimen de funcionamiento no sincronizado en el que la velocidad del eje accionado es menor que la velocidad del eje de accionamiento siendo el par del eje accionado mayor que el par del eje de accionamiento. Opcionalmente, puede disponerse una tercera rueda libre también configurada para girar libremente en un sentido y transmitir potencia en sentido contrario. Dicha tercera rueda libre está configurada para conectar el eje de accionamiento y el eje accionado impidiendo que el eje accionado gire a mayor velocidad que el eje de accionamiento. En algunos ejemplos, el presente convertidor de par puede incluir un primer engranaje inversor solidario de la segunda rueda libre. Dicho primer engranaje inversor engrana con un segundo engranaje inversor que, a su vez, engrana con un engranaje solidario del eje accionado. Puede disponerse un tercer engranaje inversor, coaxial con dicho segundo engranaje inversor, que engrane con un cuarto engranaje inversor. Dicho cuarto engranaje inversor engrana, a su vez, con un quinto engranaje inversor solidario del eje accionado. También se prevé que pueda incorporarse un mecanismo para modificar la velocidad del engranaje planetario. Si se incluye, dicho mecanismo para modificar la velocidad del engranaje planetario comprende un engranaje de accionamiento solidario del eje de accionamiento y un engranaje accionado conectado al engranaje planetario a través de una cuarta rueda libre. Dicho mecanismo para modificar la velocidad del engranaje planetario incluye también un eje de cambio provisto de un primer engranaje de cambio solidario de dicho eje de cambio y que engrana con dicho engranaje de accionamiento a través de un sexto engranaje inversor y un segundo engranaje de cambio solidario del eje de cambio y que engrana con el engranaje accionado. Se contempla también el caso en que el convertidor de par comprende un engranaje planetario adicional solidario del eje accionado que engrana con un grupo adicional de engranajes satélites. El grupo adicional de engranajes satélites engranan con una corona dentada que, a su vez, engrana con el citado segundo engranaje de cambio. Dicha corona dentada puede estar conectada, a través dicha cuarta rueda libre, a un elemento porta-satélite que es solidario del eje de accionamiento y que soporta de manera giratoria el grupo adicional de engranajes satélites. Se describe también un mecanismo de transmisión variable continua que comprende por lo menos un convertidor de par como el descrito anteriormente conectado al eje accionado del mismo. Dicho mecanismo de transmisión variable continua puede comprender una pluralidad de convertidores de par, por ejemplo, dos o más. En este caso, la masa excéntrica de un grupo de engranajes satélites estaría desfasada angularmente 180° respecto a la masa excéntrica de un grupo de engranajes satélites contiguo. En dicho mecanismo de transmisión variable continua pueden incorporarse medios elásticos para conectar engranajes planetarios contiguos de modo que se mantenga el citado desfase angular de la masa excéntrica de correspondientes grupos de engranajes satélites contiguos. El mecanismo de transmisión variable continua puede conectarse a un sistema de transmisión variable conectado al eje accionado. Con un mecanismo de transmisión como el descrito, que incluye el citado convertidor de par basado en un sistema inercial y ruedas libres que transmiten par en un sentido, es posible regular automáticamente y de manera efectiva la relación de transmisión entre un eje de accionamiento y un eje accionado en función de la velocidad y el par aplicados a ellos, de modo que sus velocidades se sincronizan de manera automática sin el uso de un embrague. Al tratarse de un sistema mecánico, se evitan pérdidas asociadas al movimiento de un fluido, como ocurre con los convertidores hidrodinámicos conocidos. Con el mecanismo de transmisión descrito, se mejora el rendimiento, se reducen las dimensiones, y también los costes. Además, en el presente convertidor de par, una sobrecarga no frenará el eje de accionamiento, aumentando el rendimiento y la durabilidad del motor. El presente convertidor de par puede aplicarse en infinidad de escenarios, por ejemplo, para modificar la respuesta de motores eléctricos de inducción y, en general, en escenarios donde los convertidores hidrodinámicos no son aplicables debido a las dimensiones o el coste. Otras ventajas y características de realizaciones del presente mecanismo de transmisión se pondrán de manifiesto para el experto en la materia a partir de la siguiente descripción de ejemplos, o podrán derivarse al poner en práctica la descripción. Breve descripción de los dibujos A continuación, se describirán unos ejemplos particulares no limitativos del presente mecanismo de transmisión, con referencia a los dibujos adjuntos. En los dibujos: La figura 1 es una vista esquemática en perspectiva de un primer ejemplo del presente convertidor de par en una configuración básica; La figura 2 es una vista en alzado en sección del primer ejemplo del convertidor de par de la figura 1; La figura 3 es una vista esquemática en perspectiva de despiece de un segundo ejemplo del presente convertidor de par, en una configuración en que se incluye un mecanismo inversor; La figura 4 es una vista frontal del segundo ejemplo del presente convertidor de par de la figura 3; La figura 5 es una vista en alzado en sección del segundo ejemplo del convertidor de par de las figuras 3 y 4; La figura 6 es una vista esquemática en perspectiva de despiece de un tercer ejemplo del presente convertidor de par en una configuración en que se dispone un mecanismo inversor; La figura 7 es una vista en alzado en sección del tercer ejemplo del convertidor de par de la figura 6; La figura 8 es una vista esquemática en perspectiva de despiece de un cuarto ejemplo del presente convertidor de par en una configuración en que se disponen engranajes de cambio para variar la relación de cambio; La figura 9 es una vista en alzado en sección del cuarto ejemplo del convertidor de par de la figura 8; La figura 10 es una vista esquemática en perspectiva de despiece de un quinto ejemplo del presente convertidor de par en una configuración en que se utiliza un segundo grupo de engranajes satélites; La figura 11 es una vista en alzado en sección del quinto ejemplo del convertidor de par de la figura 10; La figura 12 es una vista esquemática en perspectiva de despiece de un sexto ejemplo del presente convertidor de par en una configuración en que se utilizan dos grupos de engranajes satélites contiguos; La figura 13 es una vista en alzado en sección del sexto ejemplo del convertidor de par de la figura 12; La figura 14 es una vista esquemática en perspectiva de despiece de un mecanismo de transmisión que comprende tres convertidores de par conectados entre sí, de acuerdo con el segundo ejemplo de la figura 3; La figura 15 es una vista esquemática en perspectiva de un divisor de potencia destinado a conectarse al convertidor de par de las figuras 1 y 2; La figura 16 es una vista esquemática en perspectiva de despiece de un ejemplo de un convertidor de par conectado a un mecanismo de transmisión continuamente variable de polea y cadena; La figura 17 es una vista esquemática en perspectiva de despiece de una variante del tercer ejemplo del convertidor de par representado en la figura 6 donde los engranajes inversores se han sustituido por un mecanismo de transmisión continuamente variable de polea y cadena como el del ejemplo ilustrado en la figura 16; La figura 18 es una vista frontal de un séptimo ejemplo del presente convertidor de par; La figura 19 es una vista en alzado en sección del séptimo ejemplo del convertidor de par; La figura 20 es una gráfica que muestra la respuesta del eje accionado a la aplicación de una curva de par/velocidad angular al eje de accionamiento en el convertidor de par; Las figuras 21a, 21b y 21c muestran esquemáticamente parámetros relacionados con la mecánica del presente convertidor de par que permiten apreciar la influencia de la excentricidad del centro de masas de los engranajes satélites; La figura 22 ilustra esquemáticamente regiones de funcionamiento en rotación del convertidor de par para un régimen no sincronizado en que la velocidad del eje accionado no es nula; La figura 23 es una gráfica que muestra el par de entrada y el par de salida frente a la excentricidad del centro de masas del engranaje satélite; y La figura 24 es una gráfica que muestra el par de entrada y el par de salida y frente al tiempo del ciclo de funcionamiento en rotación del convertidor de par. Descripción detallada de ejemplos Los ejemplos no limitativos que se describen a continuación y se ilustran en las figuras de los dibujos corresponden a mecanismos mecánicos para la transmisión de potencia de una fuente de movimiento angular que proviene de un eje de accionamiento 1 a un eje accionado 6 que trabajan a una velocidad y a un par diferentes. El eje de accionamiento 1 y el eje accionado están dispuestos para girar respecto a una bancada 20, por ejemplo, de un motor de un vehículo. En los ejemplos que se describen de acuerdo con las figuras, los mecanismos de transmisión comprenden un convertidor de par de tipo inercial, designado en conjunto por la referencia 100 en las figuras. De manera general para los ejemplos descritos, el eje de accionamiento 1 es solidario de un elemento porta-satélite 15 que soporta de manera giratoria un grupo de engranajes satélites 2, tal como cuatro en el ejemplo de las figuras que se incluyen en los dibujos. Cada engranaje satélite 2 incorpora una masa excéntrica 16 de manera que, como se ilustra en la figura 4, el centro de masas 16a de cada engranaje satélite 2 no coincide con el centro del mismo, sino que está desplazado un ángulo de excentricidad a representado en la figura 4 de los dibujos. Cuando el convertidor de par 100 trabaja de acuerdo con un régimen de funcionamiento sincronizado en el que la velocidad angular del eje de accionamiento 1 es igual que la velocidad angular del eje accionado 6, el ángulo de excentricidad a definido entre el eje de accionamiento 1 y el centro de masas 16a del engranaje satélite 2 tiene un valor constante comprendido entre 0° y 180°. Cuando el convertidor de par 100 trabaja de acuerdo con un régimen de funcionamiento no sincronizado en el que la velocidad angular del eje de accionamiento 1 y la del eje accionado 6 no son iguales, dicho ángulo de excentricidad a varía entre 0° y 360°. Los engranajes satélites 2 engranan con un engranaje planetario 3. El engranaje planetario 3 está conectado al eje accionado 6 mediante una primera rueda libre RO. Se dispone también una segunda rueda libre RS que gira en sentido contrario a la primera rueda libre RO y que conecta el engranaje planetario 3 a una bancada 20. La primera rueda libre RO y la segunda rueda libre RS están configuradas para girar libremente en un sentido y transmitir potencia en sentido contrario. La primera rueda libre RO está adaptada para conectar permanentemente el engranaje planetario 3 y el eje accionado 6 permitiendo un régimen de funcionamiento sincronizado en el que la velocidad del eje de accionamiento 1 y la velocidad del eje accionado 6 son iguales, y engranar alternativamente con la segunda rueda libre RS permitiendo un régimen de funcionamiento no sincronizado en el que la velocidad del eje accionado 6 es menor que la velocidad del eje de accionamiento 1 y el par del eje accionado 6 es mayor que el par del eje de accionamiento 1. En las figuras 1 y 2 se muestra un primer ejemplo particular del presente convertidor de par 100 en una configuración básica que comprende un grupo de cuatro engranajes satélites 2, cada uno con una masa excéntrica 16, soportados de manera giratoria por un elemento portasatélite 15 que es solidario del eje de accionamiento 1. Los engranajes satélites 2 engranan con un engranaje planetario 3 conectado al eje accionado 6 a través de la primera rueda libre RO y conectado a la bancada 20 a través de la segunda rueda libre RS. Tal como se ha indicado anteriormente, las ruedas libres RO, RS pueden girar libremente en un sentido, mientras que, en sentido contrario, dichas ruedas libres RO, RS transmiten par. La primera rueda libre RO permite conectar permanentemente el engranaje planetario 3 y el eje accionado 6 permitiendo un régimen de funcionamiento sincronizado en el que la velocidad del eje de accionamiento 1 y la velocidad del eje accionado 6 son iguales, y engranar alternativamente con la segunda rueda libre RS permitiendo un régimen de funcionamiento no sincronizado en el que la velocidad del eje accionado 6 es menor que la velocidad del eje de accionamiento 1, siendo el par del eje accionado 6 mayor que el par del eje de accionamiento 1. Se hace referencia ahora a las figuras 21a-21c a 24. De acuerdo con la figura 21a, la aceleración del centro de masas 16a se descompone en una parte debida al movimiento del eje de accionamiento 1 y una parte debida a la rotación del engranaje satélite 2. En particular, la velocidad angular 02 del engranaje satélite 2 puede determinarse como: 02 = 01 (1+R/r) - 03 ^R/r, en el que: 01 es la velocidad angular del eje de accionamiento 1 ; 03 es la velocidad angular del engranaje planetario 3; R es el radio del engranaje planetario 3; y res el radio del engranaje satélite 2. En el funcionamiento sincronizado, cuando la velocidad angular del eje de accionamiento 1 y del eje accionado 6 son iguales, la primera rueda libre RO está conectada, es decir, transmite par. El ángulo a tiene un valor constante entre 0 y 180°. En este caso la velocidad angular 02 del engranaje satélite 2 es igual que la velocidad angular 01 del eje de accionamiento 1. Analizando las fuerzas inerciales que actúan sobre el engranaje satélite 2, con un equilibrio de momento angular respecto a su eje, se tiene que: FD-r = m- (R+r) -ra2i5-e-sin a en el que: Fd es la fuerza que transmite el engranaje satélite 2 al engranaje planetario 3; e es la excentricidad del centro de masas 16a del engranaje satélite 2; a es el ángulo de excentricidad entre el eje de accionamiento 1 y el centro de masas 16a del engranaje satélite 2; R es el radio del engranaje planetario 3; r es el radio del engranaje satélite 2; y 015 es la velocidad angular del elemento porta-satélites 15, que corresponde a la velocidad angular del eje de accionamiento 1. Por lo tanto, el par Md que transmite el engranaje satélite 2 al engranaje planetario 3 para una velocidad angular de accionamiento 015 del elemento porta-satélites 15 determinada es: Md = R /r (R +r) -o215-e-sin a. Se aprecia, por lo tanto, que la excentricidad e de los engranajes satélites 2 es clave para poder transmitir el par al eje accionado 6. En el funcionamiento no sincronizado, cuando la velocidad angular 01 del eje de accionamiento 1, que corresponde a la velocidad angular 015 del elemento porta-satélites 15, es mayor que la velocidad angular 03 del eje de eje accionado 6, el ángulo a varía de acuerdo con la expresión: da/dt = (01.- 03) R/r. Si, en dicho funcionamiento no sincronizado, la velocidad angular 03 y la velocidad lineal del punto de contacto entre el engranaje planetario 3 y el engranaje satélite 2 son iguales, cuando el ángulo a es menor de 180°, el par Md = Fd R se transmite al eje accionado 6 a partir de la primera rueda libre RO. Si el ángulo a es mayor de 180°, el signo de la fuerza Fd varía y la segunda rueda libre RS se conecta, es decir, transmite par al eje accionado 6. Se hace referencia ahora a las gráficas de las figuras 23 y 24 que muestran, en línea continua, el par de entrada y, en línea discontinua, el par de salida cuando la velocidad del eje accionado 6 es la mitad de la velocidad del eje de accionamiento 1. En la figura 23, el eje de abscisas corresponde al valor del ángulo a en radianes y en la figura 24 corresponde el tiempo del ciclo, siendo x el tiempo total del ciclo. En el funcionamiento no sincronizado, si la velocidad angular 03 del engranaje planetario 3 no es nula, se determinan cuatro regiones de funcionamiento en rotación según los puntos A, B, D, E representados en la figura 22. Dos regiones de funcionamiento corresponden al caso en que ni la primera rueda libre RO ni la segunda rueda libre RS están conectadas, lo cual ocurre cuando el centro de masas 16a se encuentra en la región de funcionamiento del punto A a B y en la región de funcionamiento del punto D a E, otra región de funcionamiento del punto B a D, cuando la primera rueda libre RO está conectada, es decir, transmite par, y otra región de funcionamiento del punto E a A cuando la segunda rueda libre RS está conectada, es decir, transmite par. Partiendo de la posición de acuerdo con el punto A, la segunda rueda libre RS está conectada, es decir, transmite par, de manera que, en la configuración de la figura 1, la velocidad angular en el punto D es 0 y, en la configuración de la figura 3 o 6, la velocidad angular en el punto D es igual a la velocidad angular del engranaje 4. Entre el punto A y el punto B, la fuerza inercial provoca un aumento de la velocidad del punto D y, por lo tanto, un aumento de la velocidad angular 03 del engranaje planetario 3. Cuando la velocidad angular 03 del engranaje planetario 3 es igual a la velocidad angular del eje accionado 6 (punto B) , la primera rueda libre RO se conecta de modo que transmite par de acuerdo con la expresión indicada anteriormente Md = R/r (R+r) o2i5 e sin a. Cuando el centro de masas 16a sobrepasa el punto D, la fuerza inercial tiende a reducir la velocidad del punto D, la primera rueda libre RO se desconecta, es decir, gira libremente, y el convertidor de par 100 reduce su velocidad hasta que la velocidad del punto D es cero o igual a la velocidad del engranaje 4, tal como se ha indicado anteriormente (punto E) . Entre el punto E y el punto A, la segunda rueda libre RS se conecta transmitiendo par. Tal como puede apreciarse en la figura 24, el tiempo en la región de funcionamiento del punto B al punto D es mayor que el tiempo en las otras regiones de funcionamiento. Este tiempo, durante el cual la primera rueda libre RO está conectada, aumenta a medida que la velocidad del eje accionado 6 tiende a la velocidad del eje de accionamiento 1. Cuando la diferencia de velocidades tiende a cero, el tiempo en esta región tiende a infinito y el convertidor de par 100 funciona en un régimen sincronizado. Volviendo al primer ejemplo del presente convertidor de par 100 de las figuras 1 y 2, se incluye también una tercera rueda libre RB, igualmente configurada para girar libremente en un sentido y transmitir potencia en sentido contrario. La tercera rueda libre RB permite conectar el eje de accionamiento 1 y el eje accionado 6 impidiendo que el eje accionado 6 gire a mayor velocidad que el eje de accionamiento 1. Se puede hacer uso, en este caso, del freno motor. En las figuras 3-5 se muestra un segundo ejemplo del presente convertidor de par 100 en una configuración en que se incluye un mecanismo inversor 4-5. Este segundo ejemplo del presente convertidor de par 100 presenta una configuración equivalente a la configuración del primer ejemplo del presente convertidor de par 100 de las figuras 1 y 2 con la adición de dicho mecanismo inversor 4-5 constituido por un primer engranaje inversor 4, que es solidario de la segunda rueda libre RS y un segundo engranaje inversor 5 que engrana con el primer engranaje inversor 4. El segundo engranaje inversor 5, a su vez, engrana con un engranaje 6a que es solidario del eje accionado 6. Pueden conectarse entre sí diversos convertidores de par 100, por ejemplo, tres convertidores de par 100 de acuerdo con el segundo ejemplo, tal como se ha ilustrado en la figura 14. En este caso, el eje de accionamiento 1 lleva montados solidarios unos engranajes de accionamiento 45, 45, 45" que engranan con correspondientes elementos porta-satélites 15, 15', 15". Cada elemento porta-satélites 15, 15', 15" mueve un grupo de cuatro engranajes satélites 2, 2, 2" con una masa excéntrica 16, 16, 16" correspondiente. Los engranajes satélites 2, 2, 2" tienen sus masas 16, 16, 16" desfasadas un ángulo medio de 360°/N siendo N el número de convertidores de par 100, en este ejemplo, tres, tal como se ha indicado anteriormente. Este desfase se mantiene a través de una serie de muelles de torsión, no mostrados, que conectan el engranaje planetario 3 con el engranaje planetario 3, y el engranaje planetario 3 con el engranaje planetario 3". Los engranajes satélites 2, 2, 2" engranan con un engranaje planetario 3, 3, 3" correspondiente. Cada engranaje planetario 3, 3, 3" correspondiente está conectado al eje accionado 6 a través de correspondientes primeras ruedas libres, no mostradas. Se disponen también segundas ruedas libres correspondientes, no mostradas, que giran en sentido contrario a las citadas primeras ruedas libres, que conectan cada engranaje planetario 3, 3, 3" a correspondientes engranajes inversores 4, 4, 4", que engranan con correspondientes engranajes inversores 46, 46, 46" solidarios de un eje inversor 26, tal como se muestra en icha figura 14. En funcionamiento, los engranajes inversores 4, 4, 4" hacen girar el eje accionado 6 a una velocidad proporcional a la del eje inversor 26 por medio del inversor 7-10 formado por los engranajes 7, 8 y 10, equivalente al mecanismo inversor 7-10 del tercer ejemplo que se describe a continuación de acuerdo con las figuras 6 y 7. En dichas figuras 6 y 7 se muestra un tercer ejemplo del presente convertidor de par 100 en una configuración que incluye, además, otro mecanismo inversor 4-5, equivalente al mecanismo inversor 4-5 del segundo ejemplo de las figuras 3-5 de los dibujos. Este tercer ejemplo del presente convertidor de par 100 presenta una configuración equivalente a la configuración del primer ejemplo del presente convertidor de par 100 con la adición de todavía otro mecanismo inversor 7-10 que comprende un tercer engranaje inversor 7 montado solidario del mismo eje 23 donde va montado el segundo engranaje inversor 5, tal como se muestra en la figura 6. El tercer engranaje inversor 7 engrana con un cuarto engranaje inversor 8 que, a su vez, engrana con un quinto engranaje inversor 10 montado solidario del eje accionado 6. Este inversor es equivalente al inversor del ejemplo representado en la figura 14. En las figuras 8 y 9 se muestra un cuarto ejemplo del presente convertidor de par 100. Este cuarto ejemplo del presente convertidor de par 100 presenta una configuración equivalente a la configuración del primer ejemplo del presente convertidor de par 100 con la adición de un mecanismo 24 destinado a obtener una relación de cambio para obtener una velocidad determinada del engranaje planetario 3. En particular, dicho mecanismo 24 comprende un engranaje de accionamiento 9 solidario del eje de accionamiento 1 y un engranaje accionado 13 conectado al engranaje planetario 3 a través de una cuarta rueda libre RS, tal como se muestra en la figura 9. El mecanismo 24 comprende también un eje de cambio 17 en el cual va montado solidario del mismo un engranaje de cambio 11, que engrana con el citado engranaje de accionamiento 9 a través de un engranaje inversor 22. En el eje de cambio 17 va montado, también solidario del mismo, un engranaje de cambio 12 que engrana con el engranaje accionado 13 mencionado anteriormente. Esta configuración permite obtener una relación de velocidades adecuada entre el eje de accionamiento 1 y el engranaje accionado 13. En este caso, la segunda rueda libre RS transmite el movimiento al eje accionado 6 si la relación de velocidades entre el eje de accionamiento 1 y el eje accionado 6 es pequeña. A partir de un determinado valor de dicha relación de velocidades entre el eje de accionamiento 1 y el eje accionado 6, el movimiento se transmite al eje accionado 6 a través de la cuarta rueda libre RS. En las figuras 10 y 11 se muestra un quinto ejemplo del presente convertidor de par 100 en una configuración en que se utiliza un segundo grupo de engranajes satélites 21. Este quinto ejemplo del presente convertidor de par 100 es una variante del cuarto ejemplo anterior representado en las figuras 8 y 9. En este caso, se dispone un engranaje planetario adicional 19 que es solidario del eje accionado 6. El engranaje planetario adicional 19 engrana con dicho segundo grupo de engranajes satélites 21 los cuales, a su vez, engranan con una corona dentada 14. La corona dentada 14 presenta un dentado en su periferia exterior que engrana con el segundo engranaje de cambio 12 mencionado anteriormente para el ejemplo anterior de las figuras 8 y 9, solidario del eje de cambio 17. La corona dentada 14 está conectada, a través de la cuarta rueda libre RS mencionada anteriormente, a otro elemento porta-satélite 18 solidario del eje de accionamiento 1. Este otro elemento porta-satélite 18 soporta de manera giratoria el citado segundo grupo de engranajes satélites 21. Los engranajes satélites 21 engranan con dientes interiores de la corona dentada 14. En un sexto ejemplo del presente convertidor de par 100 que se muestra en las figuras 12 y 13 de los dibujos, se utilizan dos grupos de engranajes satélites 2, 2 dispuestos contiguos entre sí y solidarios del elemento porta-satélite 15. En este ejemplo, la masa excéntrica 16 de un grupo de engranajes satélites 2 está desfasada angularmente 180° respecto a la masa excéntrica 16 de un grupo de engranajes satélites 2 contiguo. Los engranajes satélites 2, 2 engranan con correspondientes engranajes planetarios 3, 3. El engranaje planetario 3 está conectado al eje accionado 6 a través de la primera rueda libre RO, tal como se muestra en la figura 13, y el engranaje planetario 3 está conectado, a través de una quinta rueda libre RO, a un engranaje 5a que engrana con el engranaje inversor 5 montado solidario de un eje inversor 25, tal como se muestra en las figuras 12 y 13. En este sexto ejemplo, en el eje inversor 25 va también montado solidario del mismo un engranaje inversor adicional 5, que engrana con un engranaje inversor 5a correspondiente. En dicho eje inversor 25 va montado también, solidario del mismo, el tercer engranaje inversor 7 que engrana con el cuarto engranaje inversor 8 que, a su vez, engrana con el engranaje inversor 10. En la figura 15 se muestra una vista en perspectiva de un divisor de potencia 27. El divisor de potencia 27 está configurado para conectarse al convertidor de par 100 de cualquier ejemplo de las figuras 1-14 y 16-19 descritas anteriormente. La entrada de potencia al divisor de potencia 27 se realiza por el eje de accionamiento 28, que es solidario de un elemento portasatélite 29. El elemento porta-satélite 29 soporta de manera giratoria un grupo de engranajes atélites 29a. Los engranajes satélites 29a, a su vez, engranan con una corona 29c y con un engranaje planetario 29b. La corona 29c puede conectarse al eje de accionamiento 1 y el engranaje planetario 29b puede conectarse al eje accionado 6. En las figuras 16 y 17 se muestran ejemplos de un convertidor de par 100 conectado a un mecanismo de transmisión continuamente variable (CVT) 31 de polea y cadena. La figura 17 muestra una vista en perspectiva de una variante del tercer ejemplo del convertidor de par 100 ilustrado en las figuras 6 y 7 de los dibujos en la que los engranajes inversores se han sustituido por un CVT 31 de polea y cadena como el ilustrado en la figura 16. En el ejemplo particular de la figura 16, el CVT 31 comprende una primera polea 32 que está montada solidaria de un eje 33 montado giratorio respecto a la bancada 20, y una segunda polea 34 solidaria del eje accionado 6 y, por lo tanto, del engranaje 6a, tal como se muestra en la figura 16. Una cadena de transmisión 35 de longitud constante montada alrededor de la primera polea 32 y la segunda polea 34 permite transmitir el movimiento de giro de una polea a otra y, por lo tanto, al eje accionado 6. En el ejemplo de la figura 17, el CVT 31 comprende una primera polea 32 solidaria del eje inversor 23 donde va montado el engranaje inversor 5 tal como se ha descrito anteriormente para el tercer ejemplo del convertidor de par 100 ilustrado en las figuras 6 y 7 de los dibujos. El eje inversor 23 está montado giratorio respecto a la bancada 20. En dicho ejemplo de la figura 17, el CVT 31 comprende también una segunda polea 34 solidaria del eje accionado 6 asociado al engranaje inversor 4. Se dispone también, en este caso, una cadena de transmisión 35 de longitud constante montada alrededor de la primera polea 32 y la segunda polea 34 para transmitir el movimiento de giro de una polea a otra y, por lo tanto, al eje accionado 6. En ambos ejemplos de las figuras 16 y 17, el diámetro efectivo de la primera polea 32 y la segunda polea 34 varía progresivamente, de manera que, mientras uno aumenta, el otro disminuye, y viceversa. De este modo, se obtiene un CVT 31 con relaciones de transmisión que pueden variar progresivamente dentro de una determinada gama de relaciones posibles. De este modo, el mecanismo permite que un vehículo tenga el motor trabajando en un régimen de revoluciones óptimo a pesar de los cambios de velocidad y par requeridos en las ruedas motrices durante el funcionamiento. Las figuras 18 y 19 muestran todavía un séptimo ejemplo del convertidor de par 100 con dos grupos de engranajes satélites 2 y 2 conectados a través de respectivos elementos portasatélites 15 y 15 que incluyen correspondientes engranajes planetarios 3. Tal como se muestra en la figura 19, el eje de accionamiento 1 mueve un engranaje planetario 42 que engrana con unos engranajes satélites 40 que, a su vez, engranan con una corona 41 fija a la bancada 20. Se dispone también otro conjunto de engranajes satélites 42 que conectan con un engranaje planetario 43 que mueve el elemento porta-satélites 15. Los engranajes satélites 42 engranan también con una corona 44 que puede accionarse para variar el ángulo entre los elementos porta-satélite 15 y 15 y, en consecuencia, modificar la disposición angular de las masas excéntricas 16, 16 de los engranajes satélites 2 y 2. El resto de la configuración del convertidor de par 100 presenta la misma configuración mostrada en el ejemplo de las figuras 3 y 5. La gráfica de la figura 20 representa la respuesta de par T respecto a la velocidad angular w. Al aplicar al eje de accionamiento 1 un par T a una velocidad angular w según una curva A, tal como se muestra en la gráfica de la figura 20, en las configuraciones del convertidor de par 100 de los ejemplos descritos, la respuesta del eje accionado 6 es la ilustrada de acuerdo con la curva B, tal como se muestra en dicha gráfica de la figura 20. El convertidor de par 100 descrito es capaz de funcionar en dos regímenes de funcionamiento claramente diferenciados. El convertidor de par 100 puede funcionar en un régimen de funcionamiento sincronizado, de acuerdo con la zona S de la derecha de la gráfica de la figura 20, en que la velocidad del eje de accionamiento 1 es igual la velocidad del eje accionado 6 y la rueda libre RO conecta permanentemente el engranaje planetario 3 con el eje accionado 6. El convertidor de par 100 puede funcionar también en un régimen de funcionamiento no sincronizado, de acuerdo con la zona DS de la izquierda de la gráfica de la figura 20. En este caso, la primera rueda libre RO y la segunda rueda libre RS engranan alternativamente, y la velocidad del eje accionado 6 es menor que la velocidad del eje de accionamiento 1 siendo el par del eje accionado 6 mayor que el del eje de accionamiento 1, trabajando así como reductor. Los inventores han diseñado un prototipo correspondiente al segundo ejemplo de la figura 3 donde se ha conectado un motor eléctrico de una potencia nominal de 0, 09 KW y una velocidad nominal de 1350 rpm con el que ha comprobado que hay una notable mejora en el rendimiento, una reducción de las dimensiones y de los costes. A pesar de que se han descrito aquí sólo algunos ejemplos particulares de la descripción, el experto en la materia comprenderá que son posibles otras realizaciones alternativas y/o usos, así como modificaciones obvias y elementos equivalentes. Por ejemplo, el elemento portasatélite 15 puede soportar un número diferente de engranajes satélites 2. Por otra parte, aunque se han mostrado mecanismos de transmisión continuamente variable de polea y cadena, cualquier mecanismo de transmisión variable, continua o no, puede conectarse al eje accionado 6. La presente descripción, por lo tanto, abarca todas las posibles combinaciones de las realizaciones concretas que se han descrito. Los signos numéricos relativos a los dibujos y colocados entre paréntesis en una reivindicación son solamente para intentar aumentar la comprensión de la reivindicación, y no deben ser interpretados como limitantes del alcance de la protección de la reivindicación. El alcance de esta descripción no debe limitarse a realizaciones concretas, sino que debe ser determinado únicamente por una lectura apropiada de las reivindicaciones adjuntas.
Publicaciones:
ES2958386 (08/02/2024) - A1 Solicitud de patente con informe sobre el estado de la técnica
Eventos:
En fecha 13/07/2022 se realizó Registro Instancia de Solicitud
En fecha 13/07/2022 se realizó Admisión a Trámite
En fecha 13/07/2022 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 21/07/2022 se realizó Superado examen de oficio
En fecha 27/04/2023 se realizó Realizado IET
En fecha 03/05/2023 se realizó 1109P_Comunicación Traslado del IET
En fecha 08/02/2024 se realizó Publicación Solicitud
En fecha 08/02/2024 se realizó Publicación Folleto Solicitud con IET (A1)
Pagos:
13/07/2022 - Pago Tasas IET
Fuente de la información
Parte de la información aquí publicada es pública puesto que ha sido obtenida de la Oficina de Propiedad Industrial de los diferentes países el 29/04/2024 y por lo tanto puede ser que la información no esté actualizada.Parte de la información aquí mostrada ha sido calculada por nuestro sistema informático y puede no ser veraz.
Privacidad
Si considera que al información aquí publicada afecta a su privacidad y desea que eliminemos la información aquí publicada envíe un email a info@patentes-y-marcas.com o rellene el formulario que encontrará aquí.Información sobre el registro de patente nacional por CONVERTIDOR DE PAR INERCIAL Y MECANISMO DE TRANSMISIÓN VARIABLE CONTINUA con el número P202230645
El registro de patente nacional por CONVERTIDOR DE PAR INERCIAL Y MECANISMO DE TRANSMISIÓN VARIABLE CONTINUA con el número P202230645 fue solicitada el 13/07/2022. Se trata de un registro en España por lo que este registro no ofrece protección en el resto de países. El registro CONVERTIDOR DE PAR INERCIAL Y MECANISMO DE TRANSMISIÓN VARIABLE CONTINUA con el número P202230645 fue solicitada por UNIVERSITAT DE GIRONA mediante los servicios del agente Yahel Contreras Pérez. El registro [modality] por CONVERTIDOR DE PAR INERCIAL Y MECANISMO DE TRANSMISIÓN VARIABLE CONTINUA con el número P202230645 está clasificado como F16H 33/18 según la clasificación internacional de patentes.
Otras invenciones solicitadas en la clasificación internacional de patentes F16H 33/18.
Es posible conocer invenciones similares al campo de la técnica se refiere. El registro de patente nacional por CONVERTIDOR DE PAR INERCIAL Y MECANISMO DE TRANSMISIÓN VARIABLE CONTINUA con el número P202230645 está clasificado con la clasificación F16H 33/18 por lo que si se desea conocer más registros con la clasificación F16H 33/18 clicar aquí.Otras invenciones solicitadas a través del representante YAHEL CONTRERAS PÉREZ
Es posible conocer todas las invenciones solicitadas a través del agente YAHEL CONTRERAS PÉREZ entre las que se encuentra el registro patente nacional por CONVERTIDOR DE PAR INERCIAL Y MECANISMO DE TRANSMISIÓN VARIABLE CONTINUA con el número P202230645. Si se desean conocer más invenciones solicitadas a través del agente YAHEL CONTRERAS PÉREZ clicar aquí.Patentes en España
Es posible conocer todas las invenciones publicadas en España entre las que se encuentra el registro patente nacional por CONVERTIDOR DE PAR INERCIAL Y MECANISMO DE TRANSMISIÓN VARIABLE CONTINUA. Nuestro portal www.patentes-y-marcas.com ofrece acceso a las publicaciones de patentes en España. Conocer las patentes registradas en un país es importante para saber las posibilidades de fabricar, vender o explotar una invención en España.Patentes registradas en la clase F
Es posible conocer todas las patentes registradas en la clase F ( MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA) entre las que se encuentra la patente CONVERTIDOR DE PAR INERCIAL Y MECANISMO DE TRANSMISIÓN VARIABLE CONTINUA con el número P202230645. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase F16
Es posible conocer todas las patentes registradas en la clase F16 (ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS M) entre las que se encuentra la patente CONVERTIDOR DE PAR INERCIAL Y MECANISMO DE TRANSMISIÓN VARIABLE CONTINUA con el número P202230645. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase F16H
Es posible conocer todas las patentes registradas en la clase F16H (TRANSMISIONES) entre las que se encuentra la patente CONVERTIDOR DE PAR INERCIAL Y MECANISMO DE TRANSMISIÓN VARIABLE CONTINUA con el número P202230645. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.
¿Tienes alguna duda?
Escribe tu consulta y te responderemos rápida y gratuitamente.

Otras patentes similares
 P202230642
P202230642
El factor de splicing EIF4A3 cómo biomarcador en hepatocarcinoma
P202230647
Profesionales Recomendados
Barcelona
933182440
España
933182440
España

Barcelona
+34 93 362 16 97
España
+34 93 362 16 97
España

Barcelona
932 593 600
España
932 593 600
España







