


- Home /
- Publicaciones de patentes /
- MÉTODO Y SISTEMA DE SIMULACIÓN DE OPERACIONES DE SOLDADURA
Patente nacional por "MÉTODO Y SISTEMA DE SIMULACIÓN DE OPERACIONES DE SOLDADURA"
Este registro ha sido solicitado por
SEABERY SOLUCIONES, S.L.
a través del representanteNICOLÁS E. ESCUDERO PRIETO
Contacto
- Estado: Vigente
- País:
- España
- Fecha solicitud:
- 06/07/2022
- Número solicitud:
-
P202230616
- Número publicación:
-
ES2958167
- Fecha de concesión:
-
- Inventores:
-
Persona física
- Datos del titular:
-
SEABERY SOLUCIONES, S.L.
- Datos del representante:
-
Nicolás E. ESCUDERO PRIETO
- Clasificación Internacional de Patentes:
- G09B 9/00
- Clasificación Internacional de Patentes de la publicación:
- G09B 9/00
- Fecha de vencimiento:
Quiero registrar una patente

Reivindicaciones:
+ ES-2958167_A11.- Método de simulación de una operación de soldadura, donde dicha operación de soldadura representa la aplicación de una o más pasadas (3, 3, 3) de material de soldadura sobre una pieza (1) de trabajo física, y donde dichas pasadas (3, 3, 3) de material de soldadura configuran un cordón (4) de soldadura; donde dicho método comprende la operación de: - una herramienta (2) física operable por un usuario; y - un equipo (5) de simulación conectado a la herramienta (2) física, donde dicho equipo (5) de simulación está adaptado con medios hardware y software que comprenden un detector de parámetros de soldadura (6) , un calculador (7) de soldadura, un renderizador (8) y un visualizador (9) ; donde dicho método comprende la realización de los siguientes pasos, con el equipo (5) de simulación: - renderizar, con el renderizador (6) , al menos un dominio de simulación en el que se representa el cordón (4) de soldadura dentro de un espacio de soldadura tridimensional; y al menos una de entre una pieza (1) de trabajo simulada y una herramienta (2) de soldadura simulada que representan, respectivamente, una pieza (1) de trabajo física y una herramienta (2) física dentro del espacio de soldadura tridimensional; - detectar, con el detector (7) de soldadura, uno o más parámetros de soldadura de entrada que caracterizan una operación de soldadura para una o más pasadas (3, 3, 3) de material de soldadura, donde dichos parámetros de soldadura de entrada comprenden, al menos, uno de los siguientes: volumen de material depositado, superficie de material depositado, composición del material depositado, tipo de proceso de soldadura, voltaje de soldadura, corriente de soldadura, velocidad de alimentación de hilo, tipo de electrodo, composición del electrodo, tipo de gas de soldadura, caudal de gas de soldadura; y donde el método está caracterizado por que comprende, adicionalmente, los siguientes pasos: - resolver, con el calculador (8) , la forma y el volumen del cordón (4) de soldadura a partir de los parámetros de soldadura de entrada para cada una de las pasadas (3, 3, 3) , donde dicha forma y volumen se calculan como una sucesión de cortes (10) transversales interconectados que, en conjunto, configuran el cordón (4) de soldadura; - renderizar, con el renderizador (8) , el cordón (4) de soldadura en el dominio de simulación; - calcular, con el calculador (8) , el plano (11) de garganta asociado a los cortes (10) transversales del cordón de soldadura (4) , para cada pasada (3, 3, 3) y, a partir de dicho plano (11) de garganta, calcular una o más propiedades mecánicas del cordón (4) de soldadura para dichos cortes (10) transversales; - representar, con el visualizador (9) , el cordón (4) de soldadura renderizado junto con información relativa al plano (11) de garganta y/o a las propiedades mecánicas calculadas de dicho cordón (4) de soldadura para los cortes (10) transversales en el dominio de simulación, y para una o más pasadas (3, 3, 3) de material de soldadura. 2.- Método según la reivindicación anterior, donde la información relativa a las propiedades mecánicas del cordón (4) de soldadura comprende una representación, en el visualizador (9) , de información en forma de escala de color a lo largo del cordón (4) de soldadura. 3.- Método según cualquiera de las reivindicaciones anteriores, donde la información relativa a las propiedades mecánicas del cordón (4) de soldadura comprende el valor de la resistencia mecánica del cordón (4) de soldadura, obtenida a partir del plano (11) de garganta en los cortes (10) transversales. 4.- Método según cualquiera de las reivindicaciones anteriores, donde la información relativa a las propiedades mecánicas del cordón (4) de soldadura comprende uno o más valores relativos la resistencia mecánica del cordón (4) de soldadura, obtenidos a partir del plano (11) de garganta de los cortes (10) transversales. 5.- Método según la reivindicación anterior, donde los valores relativos a la resistencia mecánica del cordón (4) de soldadura comprenden el esfuerzo a compresión, el esfuerzo a tracción, y/o el esfuerzo a torsión. 6.- Método según cualquiera de las reivindicaciones anteriores, donde la información relativa al plano (11) de garganta comprende una representación de las pasadas (3, 3, 3) a lo largo del cordón (4) de soldadura y/o de sus propiedades mecánicas correspondientes. 7.- Método según cualquiera de las reivindicaciones anteriores, donde los parámetros de entrada detectados por el detector (6) de soldadura comprenden información correspondiente a una operación de soldadura real. 8.- Método según cualquiera de las reivindicaciones anteriores, donde el usuario es un usuario humano, robótico o computerizado, y donde la herramienta (2) física se opera de forma directa, o de forma indirecta a partir de una interfaz o medio de control. 9.- Método según cualquiera de las reivindicaciones anteriores, donde la pieza (1) de trabajo física y/o la herramienta (2) física comprende al menos un indicador (15) de posición, y donde se disponen adicionalmente, al menos un detector (16) de posición, adaptado para recibir información correspondiente a la posición de la pieza (1) de trabajo y/o de la herramienta (2) física por medio del indicador (15) de posición; y donde el método comprende, además, la realización de los siguientes pasos: - obtener, con el detector (16) de posición, información correspondiente a la localización de la pieza (1) de trabajo física y/o de la herramienta (2) física por medio del indicador (15) ; - determinar, con el detector (16) de posición, la posición y la orientación de la pieza (1) de trabajo física y/o de la herramienta (2) física, obteniendo información sobre al menos uno de los siguientes elementos: una parte la pieza (1) de trabajo física y/o de la herramienta (2) física que son visibles en un campo de visión; la distancia entre el detector (16) de posición y la pieza (1) de trabajo física y/o la herramienta (2) física, la ubicación y orientación de herramienta (2) física con relación a la pieza (1) de trabajo física; la orientación de la pieza (1) de trabajo física a partir de la información del detector (16) ; y - representar, con el visualizador (9) , el dominio de simulación, basado en el mapeo del indicador (15) de posición a posiciones en una pieza (1) de trabajo simulada y/o una herramienta (2) de soldadura simulada. 10.- Método según la reivindicación anterior, donde el paso de determinar, con el detector (16) , la posición y la orientación de la pieza (1) de trabajo física y/o de la herramienta (2) física comprende la obtención de información sobre, al menos, uno de los siguientes: ángulo de trabajo, ángulo de desplazamiento, velocidad de desplazamiento, distancia de trabajo entre la pieza (1) de trabajo física y/o de la herramienta (2) física. 11.- Sistema de simulación de una operación de soldadura, donde dicha operación de soldadura representa la aplicación de una o más pasadas (3, 3, 3) de material de soldadura sobre una pieza (1) de trabajo física, y donde dichas pasadas (3, 3, 3) de material de soldadura configuran un cordón (4) de soldadura; donde dicho sistema comprende: - una herramienta (2) física operable por un usuario; y - un equipo (5) de simulación conectado a la herramienta (2) física, donde dicho equipo (5) de simulación está adaptado con medios hardware y/o software que comprenden un detector (6) de parámetros de soldadura, un calculador (7) de soldadura, un renderizador (8) y un visualizador (9) ; caracterizado por que los medios hardware y/o software del equipo (5) de simulación está adaptados para realizar los pasos de un método según cualquiera de las reivindicaciones anteriores. 12.- Sistema según la reivindicación anterior, donde la herramienta (2) física comprende: - una herramienta de soldadura real, y/o - una herramienta de entrenamiento. 13.- Sistema según cualquiera de las reivindicaciones 11-12, donde la herramienta (2) física comprende un brazo robótico. 14.- Sistema según cualquiera de las reivindicaciones 11-13, que comprende: - al menos un indicador (15) de posición de una pieza (1) de trabajo física y/o de la herramienta (2) física y, adicionalmente, - al menos un detector (16) de posición, adaptado para recibir información correspondiente a la posición de la pieza (1) de trabajo y/o de la herramienta (2) física por medio del indicador (15) de posición. 15.- Sistema según las reivindicaciones 11-14, donde el indicador (15) de posición comprende uno o más de los siguientes: marcadores ópticos, marcadores impresos y/o marcadores naturales. 16.- Sistema según las reivindicaciones 11-15, donde el detector (16) de posición comprende uno o más de los siguientes: cámaras, sensores inerciales, sensores hápticos, sensores térmicos, sensores mecánicos, sensores electromagnéticos.
Los productos y servicios protegidos por este registro son:
G09B 9/00
Descripciones:
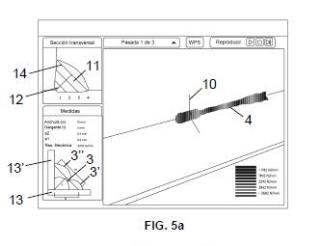
+ ES-2958167_A1 MÉTODO Y SISTEMA DE SIMULACIÓN DE OPERACIONES DE SOLDADURA CAMPO DE LA INVENCIÓN La presente invención se refiere, con carácter general, al campo del aprendizaje mediante técnicas de realidad aumentada y, más concretamente, a métodos y a sistemas para simular operaciones de soldadura por ordenador, preferentemente mediante procedimientos de realidad aumentada. En el ámbito de la presente invención, el término "realidad aumentada" se entenderá referido, además, a cualesquiera otras técnicas de representación visual mediante realidad virtual o mediante realidad mixta. ANTECEDENTES DE LA INVENCIÓN Los sistemas y métodos conocidos para simular operaciones de unión mediante deposición de material, tales como las operaciones de soldadura, requieren un uso intensivo de recursos de procesamiento gráfico para realizar las simulaciones. Así, en los sistemas de simulación de soldadura convencionales, los cálculos y la representación del cordón de soldadura simulada (esto es, el hilo de material de soldadura depositado en la interfaz de las superficies soldadas) requieren una potencia computacional considerable. Ello limita de manera efectiva los equipos en los que dicha simulación puede implementarse, quedando por lo general limitados a ordenadores con unidades de procesamiento gráfico dedicadas. A modo de ejemplo, los dispositivos móviles y/o los navegadores web no permiten, con carácter general, implementar las técnicas de simulación de soldadura convencionales. Además, dichos sistemas y métodos convencionales son engorrosos de implementar y presentan dificultades para el desarrollo de nuevas características y funcionalidades, tales como la implementación de formas de soldadura complejas y/o de simulación de diferentes materiales de soldadura. En las técnicas de simulación de soldadura conocidas, la cantidad de material transferido desde la herramienta de soldadura utilizada (por ejemplo, una antorcha de soldadura, un electrodo de soldadura, un brazo robótico de soldadura, etc.) hasta el cordón de soldadura no se puede modelar con gran precisión, como consecuencia de as limitaciones computacionales mencionadas. A pesar ello, obtener un modelado preciso del cordón de soldadura resulta crucial, en este campo, para simular de forma realista las pasadas sucesivas de material depositado que se realizan en cada operación de soldadura. Con el objetivo de mejorar las técnicas de simulación de soldadura convencionales, en los últimos años se han desarrollado diversas soluciones que permiten reducir sustancialmente los requisitos computacionales de las operaciones de simulación, manteniendo a la vez resultados de visualización realistas e, incluso, fotorrealistas, obteniéndose imágenes de simulación equiparables a los resultados de una soldadura real. Un ejemplo de estas técnicas se describe en la solicitud de patente WO 2019/171172 A1. Dicho documento describe un procedimiento de simulación de un cordón de soldadura mediante una segmentación de dicho cordón en una pluralidad de cortes transversales, lo que facilita su cálculo y posterior renderización en un entorno de simulación, al precisar de menores recursos computacionales que otras alternativas conocidas del estado de la técnica. Como consecuencia del reciente perfeccionamiento de las técnicas de simulación de operaciones de soldadura, resultaría deseable desarrollar procedimientos de cálculo realista de las propiedades mecánicas del cordón de soldadura, que puedan utilizarse como indicadores de la calidad de la soldadura alcanzada en cada operación, a través de la herramienta utilizada (antorcha de soldadura, brazo robótico, etc.) . Disponer de estos indicadores resulta de gran valor en el ámbito de las tecnologías de entrenamiento y de aprendizaje de habilidades de soldadura ya que, con ello, las personas que se encuentran aprendiendo, así como sus profesores, pueden obtener información cuantitativa acerca de la calidad de una determinada operación. Por su parte, en el ámbito de la soldadura robótica, esta capacidad permitiría refinar los procedimientos de aprendizaje de los robots de soldadura. Es importante aclarar que, hasta la fecha, no existen técnicas maduras para calcular las propiedades mecánicas de los cordones de soldadura simulados, que resulten además asumibles en términos de exigencia de recursos computacionales. Así pues, la única alternativa realista a esta posibilidad, actualmente, es la realización de ensayos de soldadura real, lo que requiere el consumo de importantes recursos materiales, principalmente en forma de piezas y material de soldadura, con el consiguiente impacto mbiental, y supone un riesgo mayor de accidente para los usuarios con menos experiencia, lo que impone necesariamente además una mayor necesidad de supervisión humana. En este contexto, la obtención de los citados procedimientos de simulación de propiedades mecánicas resultaría, adicionalmente, muy valioso para poder simular una gran variedad de ensayos de soldadura, tanto de tipo destructivo (tracción, torsión o compresión de la pieza soldada para verificar sus propiedades mecánicas y su resistencia, así como la posible existencia de defectos de soldadura) como no destructivo (por ejemplo, ensayos de tipo óptico o acústico) . De nuevo, la obtención de información realista sobre estas propiedades mediante simulación supondría un importante ahorro de materiales y costes humanos, con el correspondiente beneficio en seguridad e impacto medioambiental. Por otra parte, disponer de técnicas de cálculo por simulación de propiedades mecánicas de soldadura puede resultar beneficioso, además, en las operaciones de soldadura real. En este contexto, la simulación realista de las propiedades mecánicas de un cordón de soldadura simulado, a partir de las características de un cordón real, puede sustituir, ventajosamente, a las técnicas tradicionales basadas en ensayos destructivos y no destructivos, cuyo coste y necesidad de especialización son muy elevados. La presente invención está orientada a resolver los problemas y limitaciones anteriores, mediante un novedoso método de simulación de operaciones de soldadura, y de un sistema que implementa dicho método. DESCRIPCIÓN BREVE DE LA INVENCIÓN El método y el sistema de la invención tienen por objeto, preferentemente, la simulación de operaciones de unión por soldadura según se representa y se describe, respectivamente, en relación con la descripción, las figuras y las reivindicaciones del presente documento. Más concretamente, un primer objeto de la invención se refiere, de forma general, a un método y a un sistema adaptados para proporcionar entorno de simulación mediante ealidad aumentada, que comprenden medios hardware/software adaptados para soportar el cálculo, renderizado y visualización de gráficos preferentemente tridimensionales (3D) , así como de medios de comunicación entre usuarios de un software de simulación, junto con una implementación de métodos matemáticos y/o algoritmos que simulan procesos de soldadura en 3D. El método y el sistema de la invención se implementan, en una realización preferente de la misma, por medio de un software que puede utilizarse, por ejemplo, para administrar un aula virtual destinada al aprendizaje de técnicas de soldadura, y de una aplicación de realidad aumentada que simula un proceso de soldadura en un entorno real. Así pues, mediante el uso de técnicas de realidad aumentada, las imágenes virtuales correspondientes a las operaciones de soldadura, generadas por ordenador, se superponen o transponen a entornos reales para definir y/o crear una realidad aumentada, virtual o mixta que proporciona a los usuarios una herramienta para aprender diferentes técnicas de soldadura. En algunos ejemplos de la invención, el usuario (por ejemplo, un soldador o un aprendiz de soldadura) utiliza una pantalla, gafas de vídeo y/o cualquier otro dispositivo de visualización adaptado al efecto. La pantalla o las gafas pueden, a su vez, integrarse en una máscara de soldadura comercial y presentan la realidad mixta a un usuario que usa la máscara de soldadura. De ese modo, se consigue una simulación realista de las condiciones de la soldadura real. Si bien la presente invención se refiere habitualmente a las operaciones realizadas por un usuario, dicho usuario se entenderá, con carácter genérico, no sólo como un usuario humano, sino como cualquier elemento robótico que realice o ensaye las operaciones de soldadura. Las realizaciones de los sistemas y métodos descritos como ejemplo de la invención proporcionan, preferentemente, una representación visual simulada de piezas de trabajo de soldadura (generalmente denominadas como "cupones") . No obstante, dichas piezas de trabajo se entenderán, en el ámbito de la invención, como cualesquiera elementos, reales o simulados, que comprendan las regiones que son soldadas. Así, por ejemplo, además de los cupones, una pieza de trabajo puede entenderse como una pieza industrial, un vehículo, un elemento constructivo, o un elemento de ingeniería, real o simulado, sobre el que se desea realizar la operación de soldadura. Por su parte, los cordones de soldadura obtenidos con el método y el sistema de simulación de la invención representan, de manera realista, las deposiciones típicamente longitudinales de material de soldadura, en una o varias pasadas, dependiendo del tipo de operación de soldadura ejecutada. En diferentes realizaciones de la invención, dicho método y sistema pueden utilizarse para reproducir de forma realista la generación de defectos en el cordón de soldadura, de tal manera que un usuario pueda visualizarlos y comprender mejor cómo y por qué han ocurrido, aprendiendo a evitarlos en operaciones sucesivas. En otras realizaciones, los sistemas y métodos de la invención pueden distinguir entre diferentes técnicas utilizadas para formar una soldadura y representarla, de manera realista, bajo formatos diferentes en el medio de visualización elegido para representar la simulación. En relación con la simulación convencional de operaciones de soldadura, los sistemas y métodos descritos por la invención permiten calcular correctamente la cantidad de material transferido desde una herramienta de soldadura hasta una pieza de trabajo, ajustando la concavidad o convexidad de la geometría del cordón para mejorar la precisión de la interacción entre diferentes pasadas, mejorando la representación de las soldaduras formadas. De este modo, es posible controlar el crecimiento no natural resultante de la falta de movimiento de la herramienta de soldadura, proporcionando una transición precisa entre la pieza de trabajo y el cordón de soldadura, y simulando con precisión la fusión de las piezas de trabajo y los materiales de soldadura subyacentes, entre otras muchas ventajas. En comparación con los métodos y sistemas conocidos la invención permite, además, calcular de forma realista las propiedades mecánicas de los cordones de soldadura obtenidos, mostrándolos al usuario de forma detallada a lo largo del cordón, para cada pasada sucesiva de material depositado. Esta capacidad mejorada no puede obtenerse en operaciones de soldadura real ya que, en ellas, el cordón de soldadura se forma de modo no reversible, a medida que las pasadas sucesivas de material se depositan unas sobre otras. Adicionalmente, las realizaciones de los sistemas y métodos de la invención se basan, esencialmente, en el cálculo de las secciones transversales del cordón de soldadura, con el objetivo de calcular las propiedades mecánicas de dicho cordón a lo largo de su extensión. De ese modo, la invención permite representar las citadas propiedades mecánicas del cordón de soldadura en cualquier ubicación de corte, lo que permite indicar al usuario, entre otras ventajas, en qué puntos del cordón la soldadura se ha ealizado con menor o mayor resistencia, dónde se han realizado pasadas que mejoran o no dichas propiedades, etc. Esta capacidad no se puede obtener con las técnicas tradicionales. Para calcular las propiedades mecánicas del cordón de soldadura, la presente invención se basa en incorporar el cálculo para los cortes transversales del cordón, del valor del plano de garganta de soldadura generado. Esta magnitud se define, en teoría de soldadura, como el área máxima contenida en un corte transversal del cordón de soldadura, estando delimitada dicha área por una línea recta perpendicular a la bisectriz trazada entre los dos elementos a soldar (típicamente, dos piezas de trabajo, o dos porciones de una pieza de trabajo que se desea soldar) . El valor del plano de garganta puede relacionarse de forma directa con la resistencia mecánica del cordón en un determinado corte, conociendo el material de soldadura. Si bien esta relación entre el plano de garganta y el material de soldadura es, con carácter general, conocida en el estado de la técnica, su aplicación a técnicas de soldadura simulada resulta novedosa frente a los métodos conocidos en la presente invención. Además, según se ha mencionado previamente, la aplicación del cálculo del plano de garganta a cordones de soldadura simulados permite conocer la resistencia mecánica con cada pasada sucesiva de material, lo que no resulta posible, como se ha mencionado, en soldadura real. Más concretamente, un primer objeto de la invención se refiere a un método de simulación de una operación de soldadura, donde dicha operación de soldadura representa la aplicación de una o más pasadas de material de soldadura sobre una pieza de trabajo física, y donde dichas pasadas de material de soldadura configuran un cordón de soldadura, donde dicho método comprende la operación de: - una herramienta física operable por un usuario, siendo dicho usuario humano o un componente robótico; y - un equipo de simulación conectado a la herramienta física; donde dicho equipo de simulación está adaptado con medios hardware y software que comprenden un detector de parámetros de soldadura, un calculador de soldadura, un renderizador y un visualizador; donde dicho método comprende la realización de los siguientes pasos, con el equipo de simulación: - renderizar, con el renderizador, al menos un dominio de simulación en el que se representa el cordón de soldadura dentro de un espacio de soldadura tridimensional; y al menos una de entre una pieza de trabajo simulada y una herramienta de soldadura simulada que representan, respectivamente, la pieza de trabajo física y la herramienta física dentro del espacio de soldadura tridimensional; y - detectar, con el detector de soldadura, uno o más parámetros de soldadura de entrada que caracterizan una operación de soldadura realizada por un usuario con la herramienta física, para una o más pasadas de material de soldadura, donde dichos parámetros de soldadura de entrada comprenden, al menos, uno de los siguientes: volumen de material depositado, superficie de material depositado, composición del material depositado, tipo de proceso de soldadura, voltaje de soldadura, corriente de soldadura, velocidad de alimentación de hilo, tipo de electrodo, composición del electrodo, tipo de gas de soldadura, caudal de gas de soldadura. Ventajosamente, el método de la invención comprende, adicionalmente, los siguientes pasos: - resolver, con el calculador, la forma y el volumen del cordón de soldadura a partir de los parámetros de soldadura de entrada para cada una de las pasadas, donde dicha forma y volumen se calculan como una sucesión de cortes transversales interconectados que, en conjunto, configuran el cordón de soldadura; - renderizar, con el renderizador, el cordón de soldadura en el dominio de simulación; - calcular, con el calculador, el plano de garganta asociado a los cortes transversales del cordón de soldadura, para cada pasada y, a partir de dicho plano de garganta, calcular una o más propiedades mecánicas del cordón de soldadura para dichos cortes transversales; - representar, con el visualizador, el cordón de soldadura renderizado junto con información relativa al plano de garganta y/o a las propiedades mecánicas calculadas de dicho cordón de soldadura para los cortes transversales en el dominio de simulación, y para una o más pasadas de material de soldadura. En una realización preferente del método de la invención, la información relativa a las propiedades mecánicas del cordón de soldadura comprende una representación, en el visualizador, de información en forma de una escala de color a lo largo del cordón de soldadura. Más preferentemente, la información relativa a las propiedades mecánicas el cordón de soldadura comprende el valor de la resistencia mecánica del cordón de soldadura, obtenida a partir del plano de garganta en los cortes transversales. En otra realización preferente de la invención, la información relativa a las propiedades mecánicas del cordón de soldadura comprende uno o más valores relativos a la resistencia mecánica del cordón de soldadura, obtenidos a partir del plano de garganta de los cortes transversales. Más preferentemente, los valores relativos a la resistencia mecánica del cordón de soldadura comprenden el esfuerzo a compresión, el esfuerzo a tracción, y/o el esfuerzo a torsión. En otra realización preferente de la invención, la información relativa al plano de garganta comprende una representación de las pasadas a lo largo del cordón de soldadura. En otra realización preferente de la invención, los parámetros de entrada detectados por el detector de soldadura comprenden el volumen de material depositado, la superficie de material depositado, la composición del material depositado, el tipo de proceso de soldadura, voltaje de soldadura, corriente de soldadura, velocidad de alimentación de hilo, tipo de electrodo, composición del electrodo, tipo de gas de soldadura y/o el caudal de gas de soldadura correspondientes a una operación de soldadura real. En otra realización preferente de la invención, la pieza de trabajo física y/o la herramienta física comprenden al menos un indicador de posición, donde el método comprende, adicionalmente, una etapa en la que se dispone al menos un detector de posición, adaptado para recibir información correspondiente a la posición de la pieza de trabajo y/o de la herramienta física, por medio del indicador de posición; y donde el método comprende, además, la realización de los siguientes pasos: - obtener, con el detector de posición, información correspondiente a la localización de la pieza de trabajo física y/o de la herramienta física por medio del indicador; - determinar, con el detector de posición, la posición y la orientación de la pieza de trabajo física y/o de la herramienta física, obteniendo información sobre al menos uno de los siguientes elementos: una parte la pieza de trabajo física y/o de la herramienta física que son visibles en un campo de visión; la distancia entre el detector de posición y la pieza de trabajo física y/o la herramienta física, la ubicación y orientación e herramienta física con relación a la pieza de trabajo física; la orientación de la pieza de trabajo física a partir de la información del detector; y - representar, con el visualizador, el dominio de simulación, basado en el mapeo del indicador de posición a posiciones en una pieza de trabajo simulada y/o una herramienta de soldadura simulada. En otra realización preferente del método de la invención, el paso de determinar, con el detector, la posición y la orientación de la pieza de trabajo física y/o de la herramienta física comprende la obtención de información sobre, al menos, uno de los siguientes: ángulo de trabajo, ángulo de desplazamiento, velocidad de desplazamiento, distancia de trabajo entre la pieza de trabajo física y/o de la herramienta física. Un segundo objeto de la invención se refiere a un sistema de simulación de una operación de soldadura, donde dicha operación de soldadura representa la aplicación de una o más pasadas de material de soldadura sobre una pieza de trabajo física, y donde dichas pasadas de material de soldadura configuran un cordón de soldadura; donde dicho sistema comprende: - una herramienta física operable por un usuario, siendo dicho usuario humano o un componente robótico; y - un equipo de simulación conectado a la herramienta física (entendiéndose dicha conexión como cualquier medio que permita intercambiar información entre el equipo de simulación y la herramienta física, o de uno respecto al otro) , donde dicho equipo de simulación está adaptado con medios hardware y software que comprenden un detector de parámetros de soldadura, un calculador de soldadura, un renderizador y un visualizador; y donde, ventajosamente, el equipo de simulación está adaptado para realizar los pasos de un método según cualquiera de las realizaciones descritas en el presente documento. En una realización preferente del sistema de la invención, la herramienta física comprende una herramienta de soldadura real, una herramienta de entrenamiento y/o una herramienta de inspección de soldadura real. En otra realización preferente del sistema de la invención, la herramienta física comprende un brazo robótico o una herramienta robótica. En otra realización preferente de la invención, el sistema comprende al menos un indicador de posición de una pieza de trabajo física y/o de la herramienta física y, adicionalmente, comprende al menos un detector de posición, adaptado para recibir información correspondiente a la posición de la pieza de trabajo y/o de la herramienta física por medio del indicador de posición. En otra realización preferente del sistema de la invención, el indicador de posición comprende uno o más de los siguientes: marcadores ópticos, marcadores impresos y/o marcadores naturales. En otra realización preferente del sistema de la invención, donde el detector de posición comprende uno o más de los siguientes: cámaras, sensores inerciales, sensores hápticos, sensores térmicos, sensores mecánicos, sensores electromagnéticos. DESCRIPCIÓN DE LOS DIBUJOS Las características, aspectos y ventajas de la presente invención se entenderán con mayor detalle a partir de la descripción detallada que se acompaña a continuación, con referencia a los dibujos adjuntos en los que los caracteres similares representan partes similares a lo largo de las figuras, en las que: La Figura 1 muestra una vista en perspectiva de los elementos principales simulados con el método de la invención, en una realización preferente de la misma, donde se muestra un cordón de soldadura simulado formado por tres pasadas de material simuladas (diferenciadas en la figura por tres patrones de relleno) , donde dicho cordón simulado se deposita sobre una pieza de trabajo simulada, por medio de una herramienta de soldadura simulada que, para dicha realización, representa una antorcha de soldadura. La Figura 2 representa, esquemáticamente, los elementos principales del equipo de simulación de la invención, en una realización preferente de la misma. La Figura 3 muestra una vista en perspectiva del cordón de soldadura obtenido a partir del método de la invención, donde la forma y el volumen de dicho cordón de soldadura e calculan como una sucesión de cortes transversales interconectados, que en conjunto corresponden a una o más pasadas simuladas de material de soldadura. En la parte izquierda de la figura se representa, asimismo, una vista de perfil ampliada de las pasadas de material de soldadura simulada, para uno de dichos cortes, depositadas sobre una pieza de trabajo simulada. La Figura 4 ilustra, a modo de ejemplo, la obtención del valor del plano de garganta mediante el tazado de dos líneas rectas, a partir de la bisectriz correspondiente a un cordón de soldadura que comprende tres pasadas de material, dispuestas entre dos elementos soldados en una unión con forma de "T". En este ejemplo, una línea de las dos trazadas es la que define un área mayor en el corte transversal y, en consecuencia, la que determina el plano de garganta del cordón de soldadura, para cada sección transversal del mismo. Las Figuras 5a-5c muestran un ejemplo de representación, mediante el método de la invención, de la información relativa a las propiedades mecánicas del cordón de soldadura, en forma de escala de color a lo largo de dicho cordón, para una realización de la invención basada en tres pasadas de material de soldadura simulado. Así pues, en cada una da dichas figuras, se representa la citada información, para cada pasada de forma incremental. La Figura 6 ilustra una realización preferente de la invención, donde la pieza de trabajo y/o la herramienta comprenden uno o más indicadores de posición, así como uno o más detectores de posición adaptados para recibir información correspondiente a la posición de la pieza de trabajo y/o de la herramienta. Referencias numéricas utilizadas en la descripción (1) Pieza de trabajo simulada (1') Pieza de trabajo física (2) Herramienta de soldadura simulada (2') Herramienta física (3, 3', 3'') Pasadas de material de soldadura simuladas (4) Cordón de soldadura simulado (5) Equipo de simulación (6) Detector de parámetros de soldadura (7) Calculador de soldadura (8) Renderizador (9) Visualizador (10) Cortes transversales del cordón de soldadura (11) Plano de garganta del corte transversal (12) Bisectriz que define el plano de garganta (13, 13) Elementos soldados en una pieza o piezas de trabajo (14, 14) Rectas trazadas a partir de la bisectriz para definir el plano de garganta (15) Indicadores de posición de la pieza de trabajo física o de la herramienta física (16) Detectores de posición de los indicadores DESCRIPCIÓN DETALLADA DE LA INVENCIÓN Las Figuras 1-6 del presente documento describen una serie de realizaciones preferentes de la invención, que se incorporan con fines ilustrativos y, por tanto, no limitativos del alcance de protección de las reivindicaciones. Tal y como se ha descrito en las secciones previas, un primer objeto de la invención se refiere a un método de simulación de una operación de soldadura, donde dicha simulación se realiza, preferentemente, en un entorno de realidad aumentada, de realidad virtual o de realidad mixta. En este entorno, tal y como se muestra en la Figura 1, la operación de soldadura simulada representa, preferentemente, la aplicación de un material de soldadura simulado sobre una pieza (1) de trabajo simulada, donde la citada aplicación de material se realiza mediante una herramienta (2) de soldadura simulada (pudiendo dicha herramienta (2) ser, por ejemplo, una antorcha de soldadura simulada, un electrodo de soldadura simulado, un brazo robótico de soldadura simulado, una herramienta de inspección de soldadura simulada, etc.) . Bajo esta representación, el material de soldadura simulado se deposita como una o más pasadas (3, 3, 3) simuladas (entendidas como extensiones de material de soldadura simulado sustancialmente longitudinales, que pueden disponerse unas sobre otras, en superposición total o parcial entre ellas a medida que se van generando) , y donde el conjunto formado por dichas pasadas (3, 3. 3) simuladas configura un cordón (4) de oldadura simulado. Las pasadas (3, 3, 3) simuladas representan, por tanto, las pasadas de material que conforman, típicamente, los cordones de soldadura reales. En función de que la aplicación de la invención se refiera a realidad virtual, aumentada o mixta, determinados elementos simulados a través del método descrito (por ejemplo, la pieza (1) de trabajo simulada, la herramienta (2) de soldadura simulada, etc.) pueden generarse con relación a elementos reales correspondientes, tales como una pieza (1) de trabajo física o una herramienta (2) física, pudiendo ser esta última, en diferentes realizaciones, una herramienta de soldadura real (es decir, adaptada para la deposición de material de soldadura real) o una herramienta de entrenamiento (cuyas dimensiones, peso u otras propiedades sean similares a las de una herramienta de soldadura real, pero sin capacidad de depositar material de soldadura real) . En otras realizaciones de la invención, la herramienta (2) física puede comprender una herramienta de inspección de soldadura real, configurada para obtener, por ejemplo, información sobre la superficie, volumen, forma o composición de material correspondiente a un cordón de soldadura real, a partir de la cual se puede generar la simulación del cordón (4) de soldadura. La herramienta (2) física puede estar operada por un usuario humano, robótico o computerizado, tanto de forma directa como de forma indirecta, a partir de una interfaz o medio de control correspondiente. Así pues, a modo de ejemplo no limitativo, en un entorno de realidad aumentada, el método de la invención puede comprender la representación de una pieza (1) de trabajo simulada y de una herramienta (2) de soldadura simulada sobre una pieza (1) de trabajo física y una herramienta (2) física, respectivamente (dichos elementos físicos se representan en la Figura 2 del presente documento) . Tal y como se ha mencionado previamente, en diferentes realizaciones de la invención, una pieza (1) de trabajo física puede entenderse como una pieza industrial, un vehículo, un elemento constructivo, un elemento de ingeniería, o una parte de los mismos, sobre la que se desea realizar la operación de soldadura y/o su simulación correspondiente. En una realización preferente de la invención, tal y como se ilustra en la Figura 2, el método de la invención comprende la operación de un equipo (5) de simulación, donde dicho equipo (5) de simulación está adaptado con medios hardware y software que comprenden un detector (6) de parámetros de soldadura, un calculador (7) de soldadura, un renderizador (8) y un visualizador (9) . Si bien, en una realización preferente de la invención, dicho equipo (5) de simulación puede utilizarse conectado a una herramienta (2) física, en otras realizaciones puede utilizarse de forma independiente a dicha herramienta (2) . No obstante, en general el equipo (5) de simulación estará adaptado para recibir información obtenida de la operación de la citada herramienta (2) física, por ejemplo a partir de su interacción con un usuario humano, robótico o computerizado, y/o con una pieza (1) de trabajo física, lo que genera datos relativos a la operación de soldadura simulada que pueden ser analizados por el detector (6) . En diferentes realizaciones de la invención, la conexión entre el equipo (5) de simulación y la herramienta (2) física puede producirse mediante una conexión material (por ejemplo, a través de un cable y/o puerto de información) o de forma inalámbrica, y tanto de forma directa como a través de elementos intermediarios, adaptados para el intercambio de dichos datos entre el equipo (5) de simulación y la herramienta (2) física, o para proporcionar información de uno respecto del otro. Típicamente, el equipo (5) de simulación puede comprender cualquier tipo de ordenador o un dispositivo móvil (por ejemplo, un teléfono móvil, una tableta, etc.) . Por su parte, como se ha mencionado, el detector (6) de parámetros de soldadura está adaptado para recibir y procesar información relativa a uno o más de los siguientes parámetros relativos al material o tipo de soldadura: volumen de material depositado, superficie de material depositado, composición del material depositado, tipo de proceso de soldadura, voltaje de soldadura, corriente de soldadura, velocidad de alimentación de hilo, tipo de electrodo, composición del electrodo, tipo de gas de soldadura, caudal de gas de soldadura. De este modo, las simulaciones de las operaciones de soldadura se basan, principalmente, en la información de entrada que recibe el equipo (5) de simulación sobre las propiedades del material o tipo de soldadura, según los parámetros mencionados. Asimismo, en diferentes realizaciones de la invención, la información de entrada puede generarse de forma artificial (por ejemplo, mediante parametrizaciones de simulación, redes neuronales, herramientas de inteligencia artificial) o de forma real, a través del análisis de información correspondiente a la deposición de un material de soldadura real, por ejemplo y de forma no limitativa, mediante el análisis de las propiedades de forma, volumen o composición de un cordón (4) de soldadura real depositado, en una o varias pasadas de forma sucesiva, sobre una pieza (1) de trabajo física. Otros parámetros detectados por el detector (6) pueden comprender, en otras realizaciones preferentes de la invención, información relativa a la posición o el ovimiento de la herramienta (1) física (tal como, por ejemplo, el ángulo de trabajo, el ángulo de desplazamiento, la velocidad de desplazamiento, o la distancia de trabajo existente entre la herramienta (1) física y la pieza (2) de trabajo física) , y/o de sus correspondientes elementos simulados. El calculador (7) de soldadura está configurado, por su parte, para calcular la forma y el volumen del cordón (4) de soldadura a partir de los parámetros de soldadura de entrada procesados por el detector (6) . Preferentemente, dicho cálculo se realiza para cada pasada (3, 3, 3) de material de soldadura simulada. En general, las técnicas de cálculo asociadas a la determinación de la forma y el volumen del cordón (4) de soldadura a partir de parámetros de soldadura son conocidas y se detallan, a modo de ejemplo no limitativo de la invención, en la solicitud de patente WO 2019/171172 A1. El renderizador (8) está configurado para generar información de imágenes realistas o fotorrealistas a partir de modelos bidimensionales (2D) o tridimensionales (3D) en un entorno de simulación. Las técnicas de renderización 2D o 3D a partir de modelos son, con carácter general, conocidas en el estado de la técnica. El visualizador (9) está configurado para representar y visualizar la información de imágenes generada por el renderizador (8) . Para ello, el visualizador (9) puede comprender, en diferentes realizaciones de la invención, un monitor o una pantalla, opcionalmente táctil. Para las diferentes realizaciones preferentes antes descritas, el método de la invención comprende la realización, con el equipo (5) de simulación, de los siguientes pasos, en cualquier orden técnicamente posible: i) Renderizar, con el renderizador (8) , al menos un dominio de simulación en el que se representa el cordón (4) de soldadura simulado en un espacio de soldadura tridimensional, y al menos una de entre una pieza (1) de trabajo simulada y una herramienta (2) de soldadura simulada que representan, respectivamente, la pieza (1) de trabajo física y la herramienta (2) física dentro del citado espacio de soldadura tridimensional. ii) Detectar, con el detector (6) de soldadura, uno o más parámetros de soldadura de entrada que caracterizan la operación realizada por un usuario con la herramienta (2) física, donde dichos parámetros comprenden al menos uno de los siguientes: volumen de material depositado, superficie de material depositado, composición del material depositado, tipo de proceso de soldadura, voltaje de soldadura, corriente de soldadura, velocidad de alimentación de hilo, tipo de electrodo, composición del electrodo, tipo de gas de soldadura, caudal de gas de soldadura iii) Resolver, con el calculador (7) , la forma y el volumen del cordón (4) de soldadura a partir de los parámetros de soldadura de entrada, donde dicha forma y volumen se calculan como una sucesión de cortes (10) transversales interconectados, que en conjunto corresponden a una o más pasadas (3, 3, 3) simuladas de material de soldadura (ver Figura 3) . Así pues, cada uno de los citados cortes (10) corresponde, sustancialmente, a diferentes secciones transversales del cordón (4) de soldadura, conformado por la superposición total o parcial de las pasadas (3, 3, 3) comprendidas en dicho cordón (4) . iv) Renderizar, con el renderizador (8) , el cordón (4) de soldadura en el dominio de simulación. Ventajosamente, el método de la invención comprende, además, los siguientes pasos: v) Calcular, con el calculador (7) , el plano (11) de garganta asociado a los parámetros de soldadura detectados para cada uno de los cortes (10) transversales del dominio de simulación y, a partir de dicho plano (11) de garganta, calcular una o más propiedades mecánicas del cordón (4) de soldadura para cada uno de dichos cortes (10) transversales. Como se ha descrito previamente, el plano (11) de garganta corresponde, en teoría de soldadura, al área máxima contenida en un corte (10) transversal del cordón (4) de soldadura, estando definida dicha área por una línea recta perpendicular a la bisectriz (12) trazada entre las dos piezas o elementos (13, 13) a soldar, tal y como se ilustra en la Figura 4. En dicha figura, se representa el trazado de dos líneas (14, 14) rectas (definidas como líneas discontinuas) a partir de la bisectriz (12) (definida como una línea discontinua con puntos) correspondiente a un cordón (4) de soldadura que comprende res pasadas (3, 3, 3) de material, dispuestas entre dos elementos (13, 13) soldados en "T". En este ejemplo, una línea (14) de las dos trazadas es la que define un área mayor en el corte (10) transversal y, en consecuencia, la que determina el plano (11) de garganta (representado como la región que ocupa la trama de rayas de la Figura 4) . La determinación de dicho plano (11) de garganta, junto con la información sobre la composición del material de soldadura, permite determinar unívocamente (típicamente, mediante parametrización previa) la resistencia mecánica del cordón (4) de soldadura en cada corte (10) y, en consecuencia, determinar una o más propiedades mecánicas de dicho cordón (4) a partir del valor de resistencia mecánica calculado. vi) Representar, con el visualizador (9) , el cordón (4) de soldadura renderizado junto con información relativa al plano (11) de garganta y/o a las propiedades mecánicas de dicho cordón (4) de soldadura, para cada uno de los cortes (10) transversales del dominio de simulación en una o más pasadas (3, 3, 3) de soldadura. De forma ventajosa en la invención, a lo largo de una operación de soldadura simulada es posible calcular las propiedades mecánicas del cordón (4) de soldadura de forma incremental con cada pasada (3, 3, 3) . De este modo, es posible verificar cómo varían dichas propiedades con pasadas (3, 3, 3) sucesivas, lo cual no es posible en una operación de soldadura real. Esta capacidad es sumamente importante y valiosa para los procesos de entrenamiento de habilidades de soldadura, ya que el aumento de pasadas (3, 3, 3) no mejora, necesariamente, la resistencia mecánica del cordón (4) de soldadura. En este sentido la invención mejora sustancialmente la capacidad de análisis de propiedades mecánicas del cordón (4) respecto a otras técnicas conocidas, incluidas las de análisis de soldadura real. Así pues, en diferentes realizaciones preferentes de la invención, es posible mostrar la información relativa al plano (11) de garganta para cada pasada (3, 3, 3) sucesiva a lo largo del cordón (4) de soldadura. En una realización preferente de la invención, la información relativa a las propiedades mecánicas del cordón (4) de soldadura puede comprender una representación en forma de escala de color a lo largo del cordón (4) , para cada pasada (3, 3, 3) de material de soldadura simulada. Un ejemplo de este tipo de representación se muestra en la Figuras 5a-5c del presente documento. En ellas, se observa cómo, a partir de los valores de anchura (w) , garganta (t) (obtenida a partir de la bisectriz (12) ) y longitudes (a1, a2) eficaces soldadas en cada elemento (13, 13) de la pieza o piezas de trabajo, es posible alcular el plano de garganta (11) para cada pasada (3) en las secciones (10) del cordón (4) de soldadura. Y, a partir del valor del plano de garganta (11) , es posible calcular, por ejemplo, el valor de la resistencia mecánica a lo largo del cordón (4) . En las Figuras 5a-5c, se representa un ejemplo de soldadura basado en tres pasadas (3, 3, 3) de material de soldadura simulada, donde la información sobre el valor de resistencia mecánica (mostrado como una escala de color) se representa para cada pasada (3, 3, 3) sucesiva, respectivamente. Esta información puede mostrarse, en una realización preferente de la invención, en el visualizador (9) del equipo de soldadura o bajo cualquier otro medio de representación de información donde, por ejemplo, pueden representarse de forma conjunta el cordón (4) de soldadura simulado, las pasadas (3, 3, 3) aplicadas, y el plano de garganta (11) asociado a mismas, para cada sección (10) transversal del cordón (4) de soldadura. Dicha información puede representarse, en diferentes realizaciones de la invención, de forma estática en una determinada sección (10) , o de forma dinámica, mediante una funcionalidad de reproducción que muestre los valores obtenidos desplazándose a lo largo del cordón (4) de soldadura, por ejemplo a medida que se va depositando el material de soldadura simulada durante la aplicación de cada pasada (3, 3, 3) , o cuando se ha terminado de realizar la operación de soldadura para cada pasada (3, 3, 3) . Dicha funcionalidad de reproducción puede, en diferentes realizaciones, configurarse para recorrer, en avance o en retroceso, el cordón (4) de soldadura tanto en tiempo como en espacio, bien durante la operación de soldadura, a medida que el cordón (4) de soldadura se va conformando con cada pasada (3, 3, 3) , o bien cuando dicha operación de soldadura ya ha finalizado. Adicionalmente, a partir del valor de la resistencia mecánica en cada corte (10) transversal, es posible calcular otras propiedades mecánicas obtenidas a partir del mismo, tales como el esfuerzo a compresión, el esfuerzo a tracción, y/o el esfuerzo a torsión del cordón (4) de soldadura simulado. Es importante remarcar, una vez más, que los resultados obtenidos a partir del método de la invención proporcionan información de detalle para cada corte (10) definido, lo que permite conocer, de forma realista, las propiedades mecánicas del cordón (4) de soldadura a escala milimétrica o micrométrica, a lo largo de cada una de sus pasadas (3) sucesivas. En otra realización preferente de la invención, el método de simulación comprende la operación de una pieza (1) de trabajo física y/o de una herramienta (2) física, donde dicha pieza (1) de trabajo y/o dicha herramienta (2) comprenden uno o más indicadores (15) de posición (ver Figura 6) , pudiendo dichos indicadores (15) comprender, por ejemplo, marcadores ópticos tales como LEDs, códigos QR, códigos de barras, esferas retrorreflectivas, y/o marcadores impresos; así como marcadores naturales tales como puntos característicos de la pieza (1) de trabajo y/o de la herramienta (2) (por ejemplo, las esquinas de dichos elementos pueden ser empleados como puntos característicos, sin necesidad de disponer elementos externos de marcaje o identificación sobre los mismos) . En estas realizaciones, es posible incorporar uno o más detectores (16) de posición adaptados para recibir información correspondiente a la posición de la pieza (1) de trabajo y/o de la herramienta (2) . Dichos detectores (16) de posición pueden comprender, a modo de ejemplo no limitativo, una o varias cámaras y/o, en otras realizaciones, otros medios de detección tales como sensores inerciales, hápticos, térmicos, mecánicos, electromagnéticos, etc. En la realización anterior, basada en indicadores (15) y detectores (16) de posición, el método de la invención comprende, adicionalmente, la realización de los siguientes pasos: - obtener, con los detectores (16) , información correspondiente a la localización de la pieza (1) de trabajo física y/o de la herramienta (2) física por medio de la identificación de los indicadores (15) de posición; - determinar, con los detectores (16) , la posición y la orientación de la pieza (1) de trabajo física y/o de la herramienta (2) física, obteniendo información sobre al menos uno de los siguientes elementos: una parte la pieza (1) de trabajo física y/o de la herramienta (2) física que son visibles en un campo de visión; la distancia entre los detectores (16) y la pieza (1) de trabajo física y/o la herramienta (2) física, la ubicación y orientación de herramienta (2) física con relación a la pieza (1) de trabajo física; la orientación de la pieza (1) de trabajo física a partir de la información de los detectores (16) ; y - representar, con el visualizador (9) , el dominio de simulación, basado en el mapeo de los indicadores (15) de posición a posiciones en una pieza (1) de trabajo simulada y/o una herramienta (2) de soldadura simulada. Según el método anterior, el paso de determinar, con los detectores (16) , la posición y la orientación de la pieza (1) de trabajo física y/o de la herramienta (2) física comprende, preferentemente, la obtención de información sobre, al menos, uno de los siguientes: ángulo de trabajo, ángulo de desplazamiento, velocidad de desplazamiento, distancia de trabajo entre la pieza (1) de trabajo física y/o de la herramienta (2) física. Un segundo aspecto de la invención se refiere a un sistema de simulación de una operación de soldadura, donde dicha operación de soldadura representa la aplicación de una o más pasadas (3, 3, 3) de material de soldadura sobre una pieza (1) de trabajo física, y donde dichas pasadas (3, 3, 3) de material de soldadura configuran un cordón (4) de soldadura; donde dicho sistema comprende: - una herramienta (2) física operable por un usuario; y - un equipo (5) de simulación conectado a la herramienta (2) física, donde dicho equipo (5) de simulación está adaptado con medios hardware y software que comprenden un detector (6) de parámetros de soldadura, un calculador (7) de soldadura, un renderizador (8) y un visualizador (9) ; y donde, ventajosamente, los medios hardware/software del equipo (5) de simulación está adaptado para realizar los pasos de un método según cualquiera de las realizaciones descritas en el presente documento.
Publicaciones:
ES2958167 (02/02/2024) - A1 Solicitud de patente con informe sobre el estado de la técnica
Eventos:
En fecha 06/07/2022 se realizó Registro Instancia de Solicitud
En fecha 06/07/2022 se realizó Admisión a Trámite
En fecha 06/07/2022 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 22/07/2022 se realizó Concesión solicitud de reducción de tasas
En fecha 28/07/2022 se realizó Superado examen de oficio
En fecha 29/07/2022 se realizó Publicación concesión reducción de tasas
En fecha 31/10/2022 se realizó Realizado IET
En fecha 10/11/2022 se realizó 1109P_Comunicación Traslado del IET
En fecha 02/02/2024 se realizó Publicación Solicitud
En fecha 02/02/2024 se realizó Publicación Folleto Solicitud con IET (A1)
Pagos:
06/07/2022 - Pago Tasas IET
+ ES-2958167_A11.- Método de simulación de una operación de soldadura, donde dicha operación de soldadura representa la aplicación de una o más pasadas (3, 3, 3) de material de soldadura sobre una pieza (1) de trabajo física, y donde dichas pasadas (3, 3, 3) de material de soldadura configuran un cordón (4) de soldadura; donde dicho método comprende la operación de: - una herramienta (2) física operable por un usuario; y - un equipo (5) de simulación conectado a la herramienta (2) física, donde dicho equipo (5) de simulación está adaptado con medios hardware y software que comprenden un detector de parámetros de soldadura (6) , un calculador (7) de soldadura, un renderizador (8) y un visualizador (9) ; donde dicho método comprende la realización de los siguientes pasos, con el equipo (5) de simulación: - renderizar, con el renderizador (6) , al menos un dominio de simulación en el que se representa el cordón (4) de soldadura dentro de un espacio de soldadura tridimensional; y al menos una de entre una pieza (1) de trabajo simulada y una herramienta (2) de soldadura simulada que representan, respectivamente, una pieza (1) de trabajo física y una herramienta (2) física dentro del espacio de soldadura tridimensional; - detectar, con el detector (7) de soldadura, uno o más parámetros de soldadura de entrada que caracterizan una operación de soldadura para una o más pasadas (3, 3, 3) de material de soldadura, donde dichos parámetros de soldadura de entrada comprenden, al menos, uno de los siguientes: volumen de material depositado, superficie de material depositado, composición del material depositado, tipo de proceso de soldadura, voltaje de soldadura, corriente de soldadura, velocidad de alimentación de hilo, tipo de electrodo, composición del electrodo, tipo de gas de soldadura, caudal de gas de soldadura; y donde el método está caracterizado por que comprende, adicionalmente, los siguientes pasos: - resolver, con el calculador (8) , la forma y el volumen del cordón (4) de soldadura a partir de los parámetros de soldadura de entrada para cada una de las pasadas (3, 3, 3) , donde dicha forma y volumen se calculan como una sucesión de cortes (10) transversales interconectados que, en conjunto, configuran el cordón (4) de soldadura; - renderizar, con el renderizador (8) , el cordón (4) de soldadura en el dominio de simulación; - calcular, con el calculador (8) , el plano (11) de garganta asociado a los cortes (10) transversales del cordón de soldadura (4) , para cada pasada (3, 3, 3) y, a partir de dicho plano (11) de garganta, calcular una o más propiedades mecánicas del cordón (4) de soldadura para dichos cortes (10) transversales; - representar, con el visualizador (9) , el cordón (4) de soldadura renderizado junto con información relativa al plano (11) de garganta y/o a las propiedades mecánicas calculadas de dicho cordón (4) de soldadura para los cortes (10) transversales en el dominio de simulación, y para una o más pasadas (3, 3, 3) de material de soldadura. 2.- Método según la reivindicación anterior, donde la información relativa a las propiedades mecánicas del cordón (4) de soldadura comprende una representación, en el visualizador (9) , de información en forma de escala de color a lo largo del cordón (4) de soldadura. 3.- Método según cualquiera de las reivindicaciones anteriores, donde la información relativa a las propiedades mecánicas del cordón (4) de soldadura comprende el valor de la resistencia mecánica del cordón (4) de soldadura, obtenida a partir del plano (11) de garganta en los cortes (10) transversales. 4.- Método según cualquiera de las reivindicaciones anteriores, donde la información relativa a las propiedades mecánicas del cordón (4) de soldadura comprende uno o más valores relativos la resistencia mecánica del cordón (4) de soldadura, obtenidos a partir del plano (11) de garganta de los cortes (10) transversales. 5.- Método según la reivindicación anterior, donde los valores relativos a la resistencia mecánica del cordón (4) de soldadura comprenden el esfuerzo a compresión, el esfuerzo a tracción, y/o el esfuerzo a torsión. 6.- Método según cualquiera de las reivindicaciones anteriores, donde la información relativa al plano (11) de garganta comprende una representación de las pasadas (3, 3, 3) a lo largo del cordón (4) de soldadura y/o de sus propiedades mecánicas correspondientes. 7.- Método según cualquiera de las reivindicaciones anteriores, donde los parámetros de entrada detectados por el detector (6) de soldadura comprenden información correspondiente a una operación de soldadura real. 8.- Método según cualquiera de las reivindicaciones anteriores, donde el usuario es un usuario humano, robótico o computerizado, y donde la herramienta (2) física se opera de forma directa, o de forma indirecta a partir de una interfaz o medio de control. 9.- Método según cualquiera de las reivindicaciones anteriores, donde la pieza (1) de trabajo física y/o la herramienta (2) física comprende al menos un indicador (15) de posición, y donde se disponen adicionalmente, al menos un detector (16) de posición, adaptado para recibir información correspondiente a la posición de la pieza (1) de trabajo y/o de la herramienta (2) física por medio del indicador (15) de posición; y donde el método comprende, además, la realización de los siguientes pasos: - obtener, con el detector (16) de posición, información correspondiente a la localización de la pieza (1) de trabajo física y/o de la herramienta (2) física por medio del indicador (15) ; - determinar, con el detector (16) de posición, la posición y la orientación de la pieza (1) de trabajo física y/o de la herramienta (2) física, obteniendo información sobre al menos uno de los siguientes elementos: una parte la pieza (1) de trabajo física y/o de la herramienta (2) física que son visibles en un campo de visión; la distancia entre el detector (16) de posición y la pieza (1) de trabajo física y/o la herramienta (2) física, la ubicación y orientación de herramienta (2) física con relación a la pieza (1) de trabajo física; la orientación de la pieza (1) de trabajo física a partir de la información del detector (16) ; y - representar, con el visualizador (9) , el dominio de simulación, basado en el mapeo del indicador (15) de posición a posiciones en una pieza (1) de trabajo simulada y/o una herramienta (2) de soldadura simulada. 10.- Método según la reivindicación anterior, donde el paso de determinar, con el detector (16) , la posición y la orientación de la pieza (1) de trabajo física y/o de la herramienta (2) física comprende la obtención de información sobre, al menos, uno de los siguientes: ángulo de trabajo, ángulo de desplazamiento, velocidad de desplazamiento, distancia de trabajo entre la pieza (1) de trabajo física y/o de la herramienta (2) física. 11.- Sistema de simulación de una operación de soldadura, donde dicha operación de soldadura representa la aplicación de una o más pasadas (3, 3, 3) de material de soldadura sobre una pieza (1) de trabajo física, y donde dichas pasadas (3, 3, 3) de material de soldadura configuran un cordón (4) de soldadura; donde dicho sistema comprende: - una herramienta (2) física operable por un usuario; y - un equipo (5) de simulación conectado a la herramienta (2) física, donde dicho equipo (5) de simulación está adaptado con medios hardware y/o software que comprenden un detector (6) de parámetros de soldadura, un calculador (7) de soldadura, un renderizador (8) y un visualizador (9) ; caracterizado por que los medios hardware y/o software del equipo (5) de simulación está adaptados para realizar los pasos de un método según cualquiera de las reivindicaciones anteriores. 12.- Sistema según la reivindicación anterior, donde la herramienta (2) física comprende: - una herramienta de soldadura real, y/o - una herramienta de entrenamiento. 13.- Sistema según cualquiera de las reivindicaciones 11-12, donde la herramienta (2) física comprende un brazo robótico. 14.- Sistema según cualquiera de las reivindicaciones 11-13, que comprende: - al menos un indicador (15) de posición de una pieza (1) de trabajo física y/o de la herramienta (2) física y, adicionalmente, - al menos un detector (16) de posición, adaptado para recibir información correspondiente a la posición de la pieza (1) de trabajo y/o de la herramienta (2) física por medio del indicador (15) de posición. 15.- Sistema según las reivindicaciones 11-14, donde el indicador (15) de posición comprende uno o más de los siguientes: marcadores ópticos, marcadores impresos y/o marcadores naturales. 16.- Sistema según las reivindicaciones 11-15, donde el detector (16) de posición comprende uno o más de los siguientes: cámaras, sensores inerciales, sensores hápticos, sensores térmicos, sensores mecánicos, sensores electromagnéticos.
Los productos y servicios protegidos por este registro son:
G09B 9/00
Descripciones:
+ ES-2958167_A1 MÉTODO Y SISTEMA DE SIMULACIÓN DE OPERACIONES DE SOLDADURA CAMPO DE LA INVENCIÓN La presente invención se refiere, con carácter general, al campo del aprendizaje mediante técnicas de realidad aumentada y, más concretamente, a métodos y a sistemas para simular operaciones de soldadura por ordenador, preferentemente mediante procedimientos de realidad aumentada. En el ámbito de la presente invención, el término "realidad aumentada" se entenderá referido, además, a cualesquiera otras técnicas de representación visual mediante realidad virtual o mediante realidad mixta. ANTECEDENTES DE LA INVENCIÓN Los sistemas y métodos conocidos para simular operaciones de unión mediante deposición de material, tales como las operaciones de soldadura, requieren un uso intensivo de recursos de procesamiento gráfico para realizar las simulaciones. Así, en los sistemas de simulación de soldadura convencionales, los cálculos y la representación del cordón de soldadura simulada (esto es, el hilo de material de soldadura depositado en la interfaz de las superficies soldadas) requieren una potencia computacional considerable. Ello limita de manera efectiva los equipos en los que dicha simulación puede implementarse, quedando por lo general limitados a ordenadores con unidades de procesamiento gráfico dedicadas. A modo de ejemplo, los dispositivos móviles y/o los navegadores web no permiten, con carácter general, implementar las técnicas de simulación de soldadura convencionales. Además, dichos sistemas y métodos convencionales son engorrosos de implementar y presentan dificultades para el desarrollo de nuevas características y funcionalidades, tales como la implementación de formas de soldadura complejas y/o de simulación de diferentes materiales de soldadura. En las técnicas de simulación de soldadura conocidas, la cantidad de material transferido desde la herramienta de soldadura utilizada (por ejemplo, una antorcha de soldadura, un electrodo de soldadura, un brazo robótico de soldadura, etc.) hasta el cordón de soldadura no se puede modelar con gran precisión, como consecuencia de as limitaciones computacionales mencionadas. A pesar ello, obtener un modelado preciso del cordón de soldadura resulta crucial, en este campo, para simular de forma realista las pasadas sucesivas de material depositado que se realizan en cada operación de soldadura. Con el objetivo de mejorar las técnicas de simulación de soldadura convencionales, en los últimos años se han desarrollado diversas soluciones que permiten reducir sustancialmente los requisitos computacionales de las operaciones de simulación, manteniendo a la vez resultados de visualización realistas e, incluso, fotorrealistas, obteniéndose imágenes de simulación equiparables a los resultados de una soldadura real. Un ejemplo de estas técnicas se describe en la solicitud de patente WO 2019/171172 A1. Dicho documento describe un procedimiento de simulación de un cordón de soldadura mediante una segmentación de dicho cordón en una pluralidad de cortes transversales, lo que facilita su cálculo y posterior renderización en un entorno de simulación, al precisar de menores recursos computacionales que otras alternativas conocidas del estado de la técnica. Como consecuencia del reciente perfeccionamiento de las técnicas de simulación de operaciones de soldadura, resultaría deseable desarrollar procedimientos de cálculo realista de las propiedades mecánicas del cordón de soldadura, que puedan utilizarse como indicadores de la calidad de la soldadura alcanzada en cada operación, a través de la herramienta utilizada (antorcha de soldadura, brazo robótico, etc.) . Disponer de estos indicadores resulta de gran valor en el ámbito de las tecnologías de entrenamiento y de aprendizaje de habilidades de soldadura ya que, con ello, las personas que se encuentran aprendiendo, así como sus profesores, pueden obtener información cuantitativa acerca de la calidad de una determinada operación. Por su parte, en el ámbito de la soldadura robótica, esta capacidad permitiría refinar los procedimientos de aprendizaje de los robots de soldadura. Es importante aclarar que, hasta la fecha, no existen técnicas maduras para calcular las propiedades mecánicas de los cordones de soldadura simulados, que resulten además asumibles en términos de exigencia de recursos computacionales. Así pues, la única alternativa realista a esta posibilidad, actualmente, es la realización de ensayos de soldadura real, lo que requiere el consumo de importantes recursos materiales, principalmente en forma de piezas y material de soldadura, con el consiguiente impacto mbiental, y supone un riesgo mayor de accidente para los usuarios con menos experiencia, lo que impone necesariamente además una mayor necesidad de supervisión humana. En este contexto, la obtención de los citados procedimientos de simulación de propiedades mecánicas resultaría, adicionalmente, muy valioso para poder simular una gran variedad de ensayos de soldadura, tanto de tipo destructivo (tracción, torsión o compresión de la pieza soldada para verificar sus propiedades mecánicas y su resistencia, así como la posible existencia de defectos de soldadura) como no destructivo (por ejemplo, ensayos de tipo óptico o acústico) . De nuevo, la obtención de información realista sobre estas propiedades mediante simulación supondría un importante ahorro de materiales y costes humanos, con el correspondiente beneficio en seguridad e impacto medioambiental. Por otra parte, disponer de técnicas de cálculo por simulación de propiedades mecánicas de soldadura puede resultar beneficioso, además, en las operaciones de soldadura real. En este contexto, la simulación realista de las propiedades mecánicas de un cordón de soldadura simulado, a partir de las características de un cordón real, puede sustituir, ventajosamente, a las técnicas tradicionales basadas en ensayos destructivos y no destructivos, cuyo coste y necesidad de especialización son muy elevados. La presente invención está orientada a resolver los problemas y limitaciones anteriores, mediante un novedoso método de simulación de operaciones de soldadura, y de un sistema que implementa dicho método. DESCRIPCIÓN BREVE DE LA INVENCIÓN El método y el sistema de la invención tienen por objeto, preferentemente, la simulación de operaciones de unión por soldadura según se representa y se describe, respectivamente, en relación con la descripción, las figuras y las reivindicaciones del presente documento. Más concretamente, un primer objeto de la invención se refiere, de forma general, a un método y a un sistema adaptados para proporcionar entorno de simulación mediante ealidad aumentada, que comprenden medios hardware/software adaptados para soportar el cálculo, renderizado y visualización de gráficos preferentemente tridimensionales (3D) , así como de medios de comunicación entre usuarios de un software de simulación, junto con una implementación de métodos matemáticos y/o algoritmos que simulan procesos de soldadura en 3D. El método y el sistema de la invención se implementan, en una realización preferente de la misma, por medio de un software que puede utilizarse, por ejemplo, para administrar un aula virtual destinada al aprendizaje de técnicas de soldadura, y de una aplicación de realidad aumentada que simula un proceso de soldadura en un entorno real. Así pues, mediante el uso de técnicas de realidad aumentada, las imágenes virtuales correspondientes a las operaciones de soldadura, generadas por ordenador, se superponen o transponen a entornos reales para definir y/o crear una realidad aumentada, virtual o mixta que proporciona a los usuarios una herramienta para aprender diferentes técnicas de soldadura. En algunos ejemplos de la invención, el usuario (por ejemplo, un soldador o un aprendiz de soldadura) utiliza una pantalla, gafas de vídeo y/o cualquier otro dispositivo de visualización adaptado al efecto. La pantalla o las gafas pueden, a su vez, integrarse en una máscara de soldadura comercial y presentan la realidad mixta a un usuario que usa la máscara de soldadura. De ese modo, se consigue una simulación realista de las condiciones de la soldadura real. Si bien la presente invención se refiere habitualmente a las operaciones realizadas por un usuario, dicho usuario se entenderá, con carácter genérico, no sólo como un usuario humano, sino como cualquier elemento robótico que realice o ensaye las operaciones de soldadura. Las realizaciones de los sistemas y métodos descritos como ejemplo de la invención proporcionan, preferentemente, una representación visual simulada de piezas de trabajo de soldadura (generalmente denominadas como "cupones") . No obstante, dichas piezas de trabajo se entenderán, en el ámbito de la invención, como cualesquiera elementos, reales o simulados, que comprendan las regiones que son soldadas. Así, por ejemplo, además de los cupones, una pieza de trabajo puede entenderse como una pieza industrial, un vehículo, un elemento constructivo, o un elemento de ingeniería, real o simulado, sobre el que se desea realizar la operación de soldadura. Por su parte, los cordones de soldadura obtenidos con el método y el sistema de simulación de la invención representan, de manera realista, las deposiciones típicamente longitudinales de material de soldadura, en una o varias pasadas, dependiendo del tipo de operación de soldadura ejecutada. En diferentes realizaciones de la invención, dicho método y sistema pueden utilizarse para reproducir de forma realista la generación de defectos en el cordón de soldadura, de tal manera que un usuario pueda visualizarlos y comprender mejor cómo y por qué han ocurrido, aprendiendo a evitarlos en operaciones sucesivas. En otras realizaciones, los sistemas y métodos de la invención pueden distinguir entre diferentes técnicas utilizadas para formar una soldadura y representarla, de manera realista, bajo formatos diferentes en el medio de visualización elegido para representar la simulación. En relación con la simulación convencional de operaciones de soldadura, los sistemas y métodos descritos por la invención permiten calcular correctamente la cantidad de material transferido desde una herramienta de soldadura hasta una pieza de trabajo, ajustando la concavidad o convexidad de la geometría del cordón para mejorar la precisión de la interacción entre diferentes pasadas, mejorando la representación de las soldaduras formadas. De este modo, es posible controlar el crecimiento no natural resultante de la falta de movimiento de la herramienta de soldadura, proporcionando una transición precisa entre la pieza de trabajo y el cordón de soldadura, y simulando con precisión la fusión de las piezas de trabajo y los materiales de soldadura subyacentes, entre otras muchas ventajas. En comparación con los métodos y sistemas conocidos la invención permite, además, calcular de forma realista las propiedades mecánicas de los cordones de soldadura obtenidos, mostrándolos al usuario de forma detallada a lo largo del cordón, para cada pasada sucesiva de material depositado. Esta capacidad mejorada no puede obtenerse en operaciones de soldadura real ya que, en ellas, el cordón de soldadura se forma de modo no reversible, a medida que las pasadas sucesivas de material se depositan unas sobre otras. Adicionalmente, las realizaciones de los sistemas y métodos de la invención se basan, esencialmente, en el cálculo de las secciones transversales del cordón de soldadura, con el objetivo de calcular las propiedades mecánicas de dicho cordón a lo largo de su extensión. De ese modo, la invención permite representar las citadas propiedades mecánicas del cordón de soldadura en cualquier ubicación de corte, lo que permite indicar al usuario, entre otras ventajas, en qué puntos del cordón la soldadura se ha ealizado con menor o mayor resistencia, dónde se han realizado pasadas que mejoran o no dichas propiedades, etc. Esta capacidad no se puede obtener con las técnicas tradicionales. Para calcular las propiedades mecánicas del cordón de soldadura, la presente invención se basa en incorporar el cálculo para los cortes transversales del cordón, del valor del plano de garganta de soldadura generado. Esta magnitud se define, en teoría de soldadura, como el área máxima contenida en un corte transversal del cordón de soldadura, estando delimitada dicha área por una línea recta perpendicular a la bisectriz trazada entre los dos elementos a soldar (típicamente, dos piezas de trabajo, o dos porciones de una pieza de trabajo que se desea soldar) . El valor del plano de garganta puede relacionarse de forma directa con la resistencia mecánica del cordón en un determinado corte, conociendo el material de soldadura. Si bien esta relación entre el plano de garganta y el material de soldadura es, con carácter general, conocida en el estado de la técnica, su aplicación a técnicas de soldadura simulada resulta novedosa frente a los métodos conocidos en la presente invención. Además, según se ha mencionado previamente, la aplicación del cálculo del plano de garganta a cordones de soldadura simulados permite conocer la resistencia mecánica con cada pasada sucesiva de material, lo que no resulta posible, como se ha mencionado, en soldadura real. Más concretamente, un primer objeto de la invención se refiere a un método de simulación de una operación de soldadura, donde dicha operación de soldadura representa la aplicación de una o más pasadas de material de soldadura sobre una pieza de trabajo física, y donde dichas pasadas de material de soldadura configuran un cordón de soldadura, donde dicho método comprende la operación de: - una herramienta física operable por un usuario, siendo dicho usuario humano o un componente robótico; y - un equipo de simulación conectado a la herramienta física; donde dicho equipo de simulación está adaptado con medios hardware y software que comprenden un detector de parámetros de soldadura, un calculador de soldadura, un renderizador y un visualizador; donde dicho método comprende la realización de los siguientes pasos, con el equipo de simulación: - renderizar, con el renderizador, al menos un dominio de simulación en el que se representa el cordón de soldadura dentro de un espacio de soldadura tridimensional; y al menos una de entre una pieza de trabajo simulada y una herramienta de soldadura simulada que representan, respectivamente, la pieza de trabajo física y la herramienta física dentro del espacio de soldadura tridimensional; y - detectar, con el detector de soldadura, uno o más parámetros de soldadura de entrada que caracterizan una operación de soldadura realizada por un usuario con la herramienta física, para una o más pasadas de material de soldadura, donde dichos parámetros de soldadura de entrada comprenden, al menos, uno de los siguientes: volumen de material depositado, superficie de material depositado, composición del material depositado, tipo de proceso de soldadura, voltaje de soldadura, corriente de soldadura, velocidad de alimentación de hilo, tipo de electrodo, composición del electrodo, tipo de gas de soldadura, caudal de gas de soldadura. Ventajosamente, el método de la invención comprende, adicionalmente, los siguientes pasos: - resolver, con el calculador, la forma y el volumen del cordón de soldadura a partir de los parámetros de soldadura de entrada para cada una de las pasadas, donde dicha forma y volumen se calculan como una sucesión de cortes transversales interconectados que, en conjunto, configuran el cordón de soldadura; - renderizar, con el renderizador, el cordón de soldadura en el dominio de simulación; - calcular, con el calculador, el plano de garganta asociado a los cortes transversales del cordón de soldadura, para cada pasada y, a partir de dicho plano de garganta, calcular una o más propiedades mecánicas del cordón de soldadura para dichos cortes transversales; - representar, con el visualizador, el cordón de soldadura renderizado junto con información relativa al plano de garganta y/o a las propiedades mecánicas calculadas de dicho cordón de soldadura para los cortes transversales en el dominio de simulación, y para una o más pasadas de material de soldadura. En una realización preferente del método de la invención, la información relativa a las propiedades mecánicas del cordón de soldadura comprende una representación, en el visualizador, de información en forma de una escala de color a lo largo del cordón de soldadura. Más preferentemente, la información relativa a las propiedades mecánicas el cordón de soldadura comprende el valor de la resistencia mecánica del cordón de soldadura, obtenida a partir del plano de garganta en los cortes transversales. En otra realización preferente de la invención, la información relativa a las propiedades mecánicas del cordón de soldadura comprende uno o más valores relativos a la resistencia mecánica del cordón de soldadura, obtenidos a partir del plano de garganta de los cortes transversales. Más preferentemente, los valores relativos a la resistencia mecánica del cordón de soldadura comprenden el esfuerzo a compresión, el esfuerzo a tracción, y/o el esfuerzo a torsión. En otra realización preferente de la invención, la información relativa al plano de garganta comprende una representación de las pasadas a lo largo del cordón de soldadura. En otra realización preferente de la invención, los parámetros de entrada detectados por el detector de soldadura comprenden el volumen de material depositado, la superficie de material depositado, la composición del material depositado, el tipo de proceso de soldadura, voltaje de soldadura, corriente de soldadura, velocidad de alimentación de hilo, tipo de electrodo, composición del electrodo, tipo de gas de soldadura y/o el caudal de gas de soldadura correspondientes a una operación de soldadura real. En otra realización preferente de la invención, la pieza de trabajo física y/o la herramienta física comprenden al menos un indicador de posición, donde el método comprende, adicionalmente, una etapa en la que se dispone al menos un detector de posición, adaptado para recibir información correspondiente a la posición de la pieza de trabajo y/o de la herramienta física, por medio del indicador de posición; y donde el método comprende, además, la realización de los siguientes pasos: - obtener, con el detector de posición, información correspondiente a la localización de la pieza de trabajo física y/o de la herramienta física por medio del indicador; - determinar, con el detector de posición, la posición y la orientación de la pieza de trabajo física y/o de la herramienta física, obteniendo información sobre al menos uno de los siguientes elementos: una parte la pieza de trabajo física y/o de la herramienta física que son visibles en un campo de visión; la distancia entre el detector de posición y la pieza de trabajo física y/o la herramienta física, la ubicación y orientación e herramienta física con relación a la pieza de trabajo física; la orientación de la pieza de trabajo física a partir de la información del detector; y - representar, con el visualizador, el dominio de simulación, basado en el mapeo del indicador de posición a posiciones en una pieza de trabajo simulada y/o una herramienta de soldadura simulada. En otra realización preferente del método de la invención, el paso de determinar, con el detector, la posición y la orientación de la pieza de trabajo física y/o de la herramienta física comprende la obtención de información sobre, al menos, uno de los siguientes: ángulo de trabajo, ángulo de desplazamiento, velocidad de desplazamiento, distancia de trabajo entre la pieza de trabajo física y/o de la herramienta física. Un segundo objeto de la invención se refiere a un sistema de simulación de una operación de soldadura, donde dicha operación de soldadura representa la aplicación de una o más pasadas de material de soldadura sobre una pieza de trabajo física, y donde dichas pasadas de material de soldadura configuran un cordón de soldadura; donde dicho sistema comprende: - una herramienta física operable por un usuario, siendo dicho usuario humano o un componente robótico; y - un equipo de simulación conectado a la herramienta física (entendiéndose dicha conexión como cualquier medio que permita intercambiar información entre el equipo de simulación y la herramienta física, o de uno respecto al otro) , donde dicho equipo de simulación está adaptado con medios hardware y software que comprenden un detector de parámetros de soldadura, un calculador de soldadura, un renderizador y un visualizador; y donde, ventajosamente, el equipo de simulación está adaptado para realizar los pasos de un método según cualquiera de las realizaciones descritas en el presente documento. En una realización preferente del sistema de la invención, la herramienta física comprende una herramienta de soldadura real, una herramienta de entrenamiento y/o una herramienta de inspección de soldadura real. En otra realización preferente del sistema de la invención, la herramienta física comprende un brazo robótico o una herramienta robótica. En otra realización preferente de la invención, el sistema comprende al menos un indicador de posición de una pieza de trabajo física y/o de la herramienta física y, adicionalmente, comprende al menos un detector de posición, adaptado para recibir información correspondiente a la posición de la pieza de trabajo y/o de la herramienta física por medio del indicador de posición. En otra realización preferente del sistema de la invención, el indicador de posición comprende uno o más de los siguientes: marcadores ópticos, marcadores impresos y/o marcadores naturales. En otra realización preferente del sistema de la invención, donde el detector de posición comprende uno o más de los siguientes: cámaras, sensores inerciales, sensores hápticos, sensores térmicos, sensores mecánicos, sensores electromagnéticos. DESCRIPCIÓN DE LOS DIBUJOS Las características, aspectos y ventajas de la presente invención se entenderán con mayor detalle a partir de la descripción detallada que se acompaña a continuación, con referencia a los dibujos adjuntos en los que los caracteres similares representan partes similares a lo largo de las figuras, en las que: La Figura 1 muestra una vista en perspectiva de los elementos principales simulados con el método de la invención, en una realización preferente de la misma, donde se muestra un cordón de soldadura simulado formado por tres pasadas de material simuladas (diferenciadas en la figura por tres patrones de relleno) , donde dicho cordón simulado se deposita sobre una pieza de trabajo simulada, por medio de una herramienta de soldadura simulada que, para dicha realización, representa una antorcha de soldadura. La Figura 2 representa, esquemáticamente, los elementos principales del equipo de simulación de la invención, en una realización preferente de la misma. La Figura 3 muestra una vista en perspectiva del cordón de soldadura obtenido a partir del método de la invención, donde la forma y el volumen de dicho cordón de soldadura e calculan como una sucesión de cortes transversales interconectados, que en conjunto corresponden a una o más pasadas simuladas de material de soldadura. En la parte izquierda de la figura se representa, asimismo, una vista de perfil ampliada de las pasadas de material de soldadura simulada, para uno de dichos cortes, depositadas sobre una pieza de trabajo simulada. La Figura 4 ilustra, a modo de ejemplo, la obtención del valor del plano de garganta mediante el tazado de dos líneas rectas, a partir de la bisectriz correspondiente a un cordón de soldadura que comprende tres pasadas de material, dispuestas entre dos elementos soldados en una unión con forma de "T". En este ejemplo, una línea de las dos trazadas es la que define un área mayor en el corte transversal y, en consecuencia, la que determina el plano de garganta del cordón de soldadura, para cada sección transversal del mismo. Las Figuras 5a-5c muestran un ejemplo de representación, mediante el método de la invención, de la información relativa a las propiedades mecánicas del cordón de soldadura, en forma de escala de color a lo largo de dicho cordón, para una realización de la invención basada en tres pasadas de material de soldadura simulado. Así pues, en cada una da dichas figuras, se representa la citada información, para cada pasada de forma incremental. La Figura 6 ilustra una realización preferente de la invención, donde la pieza de trabajo y/o la herramienta comprenden uno o más indicadores de posición, así como uno o más detectores de posición adaptados para recibir información correspondiente a la posición de la pieza de trabajo y/o de la herramienta. Referencias numéricas utilizadas en la descripción (1) Pieza de trabajo simulada (1') Pieza de trabajo física (2) Herramienta de soldadura simulada (2') Herramienta física (3, 3', 3'') Pasadas de material de soldadura simuladas (4) Cordón de soldadura simulado (5) Equipo de simulación (6) Detector de parámetros de soldadura (7) Calculador de soldadura (8) Renderizador (9) Visualizador (10) Cortes transversales del cordón de soldadura (11) Plano de garganta del corte transversal (12) Bisectriz que define el plano de garganta (13, 13) Elementos soldados en una pieza o piezas de trabajo (14, 14) Rectas trazadas a partir de la bisectriz para definir el plano de garganta (15) Indicadores de posición de la pieza de trabajo física o de la herramienta física (16) Detectores de posición de los indicadores DESCRIPCIÓN DETALLADA DE LA INVENCIÓN Las Figuras 1-6 del presente documento describen una serie de realizaciones preferentes de la invención, que se incorporan con fines ilustrativos y, por tanto, no limitativos del alcance de protección de las reivindicaciones. Tal y como se ha descrito en las secciones previas, un primer objeto de la invención se refiere a un método de simulación de una operación de soldadura, donde dicha simulación se realiza, preferentemente, en un entorno de realidad aumentada, de realidad virtual o de realidad mixta. En este entorno, tal y como se muestra en la Figura 1, la operación de soldadura simulada representa, preferentemente, la aplicación de un material de soldadura simulado sobre una pieza (1) de trabajo simulada, donde la citada aplicación de material se realiza mediante una herramienta (2) de soldadura simulada (pudiendo dicha herramienta (2) ser, por ejemplo, una antorcha de soldadura simulada, un electrodo de soldadura simulado, un brazo robótico de soldadura simulado, una herramienta de inspección de soldadura simulada, etc.) . Bajo esta representación, el material de soldadura simulado se deposita como una o más pasadas (3, 3, 3) simuladas (entendidas como extensiones de material de soldadura simulado sustancialmente longitudinales, que pueden disponerse unas sobre otras, en superposición total o parcial entre ellas a medida que se van generando) , y donde el conjunto formado por dichas pasadas (3, 3. 3) simuladas configura un cordón (4) de oldadura simulado. Las pasadas (3, 3, 3) simuladas representan, por tanto, las pasadas de material que conforman, típicamente, los cordones de soldadura reales. En función de que la aplicación de la invención se refiera a realidad virtual, aumentada o mixta, determinados elementos simulados a través del método descrito (por ejemplo, la pieza (1) de trabajo simulada, la herramienta (2) de soldadura simulada, etc.) pueden generarse con relación a elementos reales correspondientes, tales como una pieza (1) de trabajo física o una herramienta (2) física, pudiendo ser esta última, en diferentes realizaciones, una herramienta de soldadura real (es decir, adaptada para la deposición de material de soldadura real) o una herramienta de entrenamiento (cuyas dimensiones, peso u otras propiedades sean similares a las de una herramienta de soldadura real, pero sin capacidad de depositar material de soldadura real) . En otras realizaciones de la invención, la herramienta (2) física puede comprender una herramienta de inspección de soldadura real, configurada para obtener, por ejemplo, información sobre la superficie, volumen, forma o composición de material correspondiente a un cordón de soldadura real, a partir de la cual se puede generar la simulación del cordón (4) de soldadura. La herramienta (2) física puede estar operada por un usuario humano, robótico o computerizado, tanto de forma directa como de forma indirecta, a partir de una interfaz o medio de control correspondiente. Así pues, a modo de ejemplo no limitativo, en un entorno de realidad aumentada, el método de la invención puede comprender la representación de una pieza (1) de trabajo simulada y de una herramienta (2) de soldadura simulada sobre una pieza (1) de trabajo física y una herramienta (2) física, respectivamente (dichos elementos físicos se representan en la Figura 2 del presente documento) . Tal y como se ha mencionado previamente, en diferentes realizaciones de la invención, una pieza (1) de trabajo física puede entenderse como una pieza industrial, un vehículo, un elemento constructivo, un elemento de ingeniería, o una parte de los mismos, sobre la que se desea realizar la operación de soldadura y/o su simulación correspondiente. En una realización preferente de la invención, tal y como se ilustra en la Figura 2, el método de la invención comprende la operación de un equipo (5) de simulación, donde dicho equipo (5) de simulación está adaptado con medios hardware y software que comprenden un detector (6) de parámetros de soldadura, un calculador (7) de soldadura, un renderizador (8) y un visualizador (9) . Si bien, en una realización preferente de la invención, dicho equipo (5) de simulación puede utilizarse conectado a una herramienta (2) física, en otras realizaciones puede utilizarse de forma independiente a dicha herramienta (2) . No obstante, en general el equipo (5) de simulación estará adaptado para recibir información obtenida de la operación de la citada herramienta (2) física, por ejemplo a partir de su interacción con un usuario humano, robótico o computerizado, y/o con una pieza (1) de trabajo física, lo que genera datos relativos a la operación de soldadura simulada que pueden ser analizados por el detector (6) . En diferentes realizaciones de la invención, la conexión entre el equipo (5) de simulación y la herramienta (2) física puede producirse mediante una conexión material (por ejemplo, a través de un cable y/o puerto de información) o de forma inalámbrica, y tanto de forma directa como a través de elementos intermediarios, adaptados para el intercambio de dichos datos entre el equipo (5) de simulación y la herramienta (2) física, o para proporcionar información de uno respecto del otro. Típicamente, el equipo (5) de simulación puede comprender cualquier tipo de ordenador o un dispositivo móvil (por ejemplo, un teléfono móvil, una tableta, etc.) . Por su parte, como se ha mencionado, el detector (6) de parámetros de soldadura está adaptado para recibir y procesar información relativa a uno o más de los siguientes parámetros relativos al material o tipo de soldadura: volumen de material depositado, superficie de material depositado, composición del material depositado, tipo de proceso de soldadura, voltaje de soldadura, corriente de soldadura, velocidad de alimentación de hilo, tipo de electrodo, composición del electrodo, tipo de gas de soldadura, caudal de gas de soldadura. De este modo, las simulaciones de las operaciones de soldadura se basan, principalmente, en la información de entrada que recibe el equipo (5) de simulación sobre las propiedades del material o tipo de soldadura, según los parámetros mencionados. Asimismo, en diferentes realizaciones de la invención, la información de entrada puede generarse de forma artificial (por ejemplo, mediante parametrizaciones de simulación, redes neuronales, herramientas de inteligencia artificial) o de forma real, a través del análisis de información correspondiente a la deposición de un material de soldadura real, por ejemplo y de forma no limitativa, mediante el análisis de las propiedades de forma, volumen o composición de un cordón (4) de soldadura real depositado, en una o varias pasadas de forma sucesiva, sobre una pieza (1) de trabajo física. Otros parámetros detectados por el detector (6) pueden comprender, en otras realizaciones preferentes de la invención, información relativa a la posición o el ovimiento de la herramienta (1) física (tal como, por ejemplo, el ángulo de trabajo, el ángulo de desplazamiento, la velocidad de desplazamiento, o la distancia de trabajo existente entre la herramienta (1) física y la pieza (2) de trabajo física) , y/o de sus correspondientes elementos simulados. El calculador (7) de soldadura está configurado, por su parte, para calcular la forma y el volumen del cordón (4) de soldadura a partir de los parámetros de soldadura de entrada procesados por el detector (6) . Preferentemente, dicho cálculo se realiza para cada pasada (3, 3, 3) de material de soldadura simulada. En general, las técnicas de cálculo asociadas a la determinación de la forma y el volumen del cordón (4) de soldadura a partir de parámetros de soldadura son conocidas y se detallan, a modo de ejemplo no limitativo de la invención, en la solicitud de patente WO 2019/171172 A1. El renderizador (8) está configurado para generar información de imágenes realistas o fotorrealistas a partir de modelos bidimensionales (2D) o tridimensionales (3D) en un entorno de simulación. Las técnicas de renderización 2D o 3D a partir de modelos son, con carácter general, conocidas en el estado de la técnica. El visualizador (9) está configurado para representar y visualizar la información de imágenes generada por el renderizador (8) . Para ello, el visualizador (9) puede comprender, en diferentes realizaciones de la invención, un monitor o una pantalla, opcionalmente táctil. Para las diferentes realizaciones preferentes antes descritas, el método de la invención comprende la realización, con el equipo (5) de simulación, de los siguientes pasos, en cualquier orden técnicamente posible: i) Renderizar, con el renderizador (8) , al menos un dominio de simulación en el que se representa el cordón (4) de soldadura simulado en un espacio de soldadura tridimensional, y al menos una de entre una pieza (1) de trabajo simulada y una herramienta (2) de soldadura simulada que representan, respectivamente, la pieza (1) de trabajo física y la herramienta (2) física dentro del citado espacio de soldadura tridimensional. ii) Detectar, con el detector (6) de soldadura, uno o más parámetros de soldadura de entrada que caracterizan la operación realizada por un usuario con la herramienta (2) física, donde dichos parámetros comprenden al menos uno de los siguientes: volumen de material depositado, superficie de material depositado, composición del material depositado, tipo de proceso de soldadura, voltaje de soldadura, corriente de soldadura, velocidad de alimentación de hilo, tipo de electrodo, composición del electrodo, tipo de gas de soldadura, caudal de gas de soldadura iii) Resolver, con el calculador (7) , la forma y el volumen del cordón (4) de soldadura a partir de los parámetros de soldadura de entrada, donde dicha forma y volumen se calculan como una sucesión de cortes (10) transversales interconectados, que en conjunto corresponden a una o más pasadas (3, 3, 3) simuladas de material de soldadura (ver Figura 3) . Así pues, cada uno de los citados cortes (10) corresponde, sustancialmente, a diferentes secciones transversales del cordón (4) de soldadura, conformado por la superposición total o parcial de las pasadas (3, 3, 3) comprendidas en dicho cordón (4) . iv) Renderizar, con el renderizador (8) , el cordón (4) de soldadura en el dominio de simulación. Ventajosamente, el método de la invención comprende, además, los siguientes pasos: v) Calcular, con el calculador (7) , el plano (11) de garganta asociado a los parámetros de soldadura detectados para cada uno de los cortes (10) transversales del dominio de simulación y, a partir de dicho plano (11) de garganta, calcular una o más propiedades mecánicas del cordón (4) de soldadura para cada uno de dichos cortes (10) transversales. Como se ha descrito previamente, el plano (11) de garganta corresponde, en teoría de soldadura, al área máxima contenida en un corte (10) transversal del cordón (4) de soldadura, estando definida dicha área por una línea recta perpendicular a la bisectriz (12) trazada entre las dos piezas o elementos (13, 13) a soldar, tal y como se ilustra en la Figura 4. En dicha figura, se representa el trazado de dos líneas (14, 14) rectas (definidas como líneas discontinuas) a partir de la bisectriz (12) (definida como una línea discontinua con puntos) correspondiente a un cordón (4) de soldadura que comprende res pasadas (3, 3, 3) de material, dispuestas entre dos elementos (13, 13) soldados en "T". En este ejemplo, una línea (14) de las dos trazadas es la que define un área mayor en el corte (10) transversal y, en consecuencia, la que determina el plano (11) de garganta (representado como la región que ocupa la trama de rayas de la Figura 4) . La determinación de dicho plano (11) de garganta, junto con la información sobre la composición del material de soldadura, permite determinar unívocamente (típicamente, mediante parametrización previa) la resistencia mecánica del cordón (4) de soldadura en cada corte (10) y, en consecuencia, determinar una o más propiedades mecánicas de dicho cordón (4) a partir del valor de resistencia mecánica calculado. vi) Representar, con el visualizador (9) , el cordón (4) de soldadura renderizado junto con información relativa al plano (11) de garganta y/o a las propiedades mecánicas de dicho cordón (4) de soldadura, para cada uno de los cortes (10) transversales del dominio de simulación en una o más pasadas (3, 3, 3) de soldadura. De forma ventajosa en la invención, a lo largo de una operación de soldadura simulada es posible calcular las propiedades mecánicas del cordón (4) de soldadura de forma incremental con cada pasada (3, 3, 3) . De este modo, es posible verificar cómo varían dichas propiedades con pasadas (3, 3, 3) sucesivas, lo cual no es posible en una operación de soldadura real. Esta capacidad es sumamente importante y valiosa para los procesos de entrenamiento de habilidades de soldadura, ya que el aumento de pasadas (3, 3, 3) no mejora, necesariamente, la resistencia mecánica del cordón (4) de soldadura. En este sentido la invención mejora sustancialmente la capacidad de análisis de propiedades mecánicas del cordón (4) respecto a otras técnicas conocidas, incluidas las de análisis de soldadura real. Así pues, en diferentes realizaciones preferentes de la invención, es posible mostrar la información relativa al plano (11) de garganta para cada pasada (3, 3, 3) sucesiva a lo largo del cordón (4) de soldadura. En una realización preferente de la invención, la información relativa a las propiedades mecánicas del cordón (4) de soldadura puede comprender una representación en forma de escala de color a lo largo del cordón (4) , para cada pasada (3, 3, 3) de material de soldadura simulada. Un ejemplo de este tipo de representación se muestra en la Figuras 5a-5c del presente documento. En ellas, se observa cómo, a partir de los valores de anchura (w) , garganta (t) (obtenida a partir de la bisectriz (12) ) y longitudes (a1, a2) eficaces soldadas en cada elemento (13, 13) de la pieza o piezas de trabajo, es posible alcular el plano de garganta (11) para cada pasada (3) en las secciones (10) del cordón (4) de soldadura. Y, a partir del valor del plano de garganta (11) , es posible calcular, por ejemplo, el valor de la resistencia mecánica a lo largo del cordón (4) . En las Figuras 5a-5c, se representa un ejemplo de soldadura basado en tres pasadas (3, 3, 3) de material de soldadura simulada, donde la información sobre el valor de resistencia mecánica (mostrado como una escala de color) se representa para cada pasada (3, 3, 3) sucesiva, respectivamente. Esta información puede mostrarse, en una realización preferente de la invención, en el visualizador (9) del equipo de soldadura o bajo cualquier otro medio de representación de información donde, por ejemplo, pueden representarse de forma conjunta el cordón (4) de soldadura simulado, las pasadas (3, 3, 3) aplicadas, y el plano de garganta (11) asociado a mismas, para cada sección (10) transversal del cordón (4) de soldadura. Dicha información puede representarse, en diferentes realizaciones de la invención, de forma estática en una determinada sección (10) , o de forma dinámica, mediante una funcionalidad de reproducción que muestre los valores obtenidos desplazándose a lo largo del cordón (4) de soldadura, por ejemplo a medida que se va depositando el material de soldadura simulada durante la aplicación de cada pasada (3, 3, 3) , o cuando se ha terminado de realizar la operación de soldadura para cada pasada (3, 3, 3) . Dicha funcionalidad de reproducción puede, en diferentes realizaciones, configurarse para recorrer, en avance o en retroceso, el cordón (4) de soldadura tanto en tiempo como en espacio, bien durante la operación de soldadura, a medida que el cordón (4) de soldadura se va conformando con cada pasada (3, 3, 3) , o bien cuando dicha operación de soldadura ya ha finalizado. Adicionalmente, a partir del valor de la resistencia mecánica en cada corte (10) transversal, es posible calcular otras propiedades mecánicas obtenidas a partir del mismo, tales como el esfuerzo a compresión, el esfuerzo a tracción, y/o el esfuerzo a torsión del cordón (4) de soldadura simulado. Es importante remarcar, una vez más, que los resultados obtenidos a partir del método de la invención proporcionan información de detalle para cada corte (10) definido, lo que permite conocer, de forma realista, las propiedades mecánicas del cordón (4) de soldadura a escala milimétrica o micrométrica, a lo largo de cada una de sus pasadas (3) sucesivas. En otra realización preferente de la invención, el método de simulación comprende la operación de una pieza (1) de trabajo física y/o de una herramienta (2) física, donde dicha pieza (1) de trabajo y/o dicha herramienta (2) comprenden uno o más indicadores (15) de posición (ver Figura 6) , pudiendo dichos indicadores (15) comprender, por ejemplo, marcadores ópticos tales como LEDs, códigos QR, códigos de barras, esferas retrorreflectivas, y/o marcadores impresos; así como marcadores naturales tales como puntos característicos de la pieza (1) de trabajo y/o de la herramienta (2) (por ejemplo, las esquinas de dichos elementos pueden ser empleados como puntos característicos, sin necesidad de disponer elementos externos de marcaje o identificación sobre los mismos) . En estas realizaciones, es posible incorporar uno o más detectores (16) de posición adaptados para recibir información correspondiente a la posición de la pieza (1) de trabajo y/o de la herramienta (2) . Dichos detectores (16) de posición pueden comprender, a modo de ejemplo no limitativo, una o varias cámaras y/o, en otras realizaciones, otros medios de detección tales como sensores inerciales, hápticos, térmicos, mecánicos, electromagnéticos, etc. En la realización anterior, basada en indicadores (15) y detectores (16) de posición, el método de la invención comprende, adicionalmente, la realización de los siguientes pasos: - obtener, con los detectores (16) , información correspondiente a la localización de la pieza (1) de trabajo física y/o de la herramienta (2) física por medio de la identificación de los indicadores (15) de posición; - determinar, con los detectores (16) , la posición y la orientación de la pieza (1) de trabajo física y/o de la herramienta (2) física, obteniendo información sobre al menos uno de los siguientes elementos: una parte la pieza (1) de trabajo física y/o de la herramienta (2) física que son visibles en un campo de visión; la distancia entre los detectores (16) y la pieza (1) de trabajo física y/o la herramienta (2) física, la ubicación y orientación de herramienta (2) física con relación a la pieza (1) de trabajo física; la orientación de la pieza (1) de trabajo física a partir de la información de los detectores (16) ; y - representar, con el visualizador (9) , el dominio de simulación, basado en el mapeo de los indicadores (15) de posición a posiciones en una pieza (1) de trabajo simulada y/o una herramienta (2) de soldadura simulada. Según el método anterior, el paso de determinar, con los detectores (16) , la posición y la orientación de la pieza (1) de trabajo física y/o de la herramienta (2) física comprende, preferentemente, la obtención de información sobre, al menos, uno de los siguientes: ángulo de trabajo, ángulo de desplazamiento, velocidad de desplazamiento, distancia de trabajo entre la pieza (1) de trabajo física y/o de la herramienta (2) física. Un segundo aspecto de la invención se refiere a un sistema de simulación de una operación de soldadura, donde dicha operación de soldadura representa la aplicación de una o más pasadas (3, 3, 3) de material de soldadura sobre una pieza (1) de trabajo física, y donde dichas pasadas (3, 3, 3) de material de soldadura configuran un cordón (4) de soldadura; donde dicho sistema comprende: - una herramienta (2) física operable por un usuario; y - un equipo (5) de simulación conectado a la herramienta (2) física, donde dicho equipo (5) de simulación está adaptado con medios hardware y software que comprenden un detector (6) de parámetros de soldadura, un calculador (7) de soldadura, un renderizador (8) y un visualizador (9) ; y donde, ventajosamente, los medios hardware/software del equipo (5) de simulación está adaptado para realizar los pasos de un método según cualquiera de las realizaciones descritas en el presente documento.
Publicaciones:
ES2958167 (02/02/2024) - A1 Solicitud de patente con informe sobre el estado de la técnica
Eventos:
En fecha 06/07/2022 se realizó Registro Instancia de Solicitud
En fecha 06/07/2022 se realizó Admisión a Trámite
En fecha 06/07/2022 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 22/07/2022 se realizó Concesión solicitud de reducción de tasas
En fecha 28/07/2022 se realizó Superado examen de oficio
En fecha 29/07/2022 se realizó Publicación concesión reducción de tasas
En fecha 31/10/2022 se realizó Realizado IET
En fecha 10/11/2022 se realizó 1109P_Comunicación Traslado del IET
En fecha 02/02/2024 se realizó Publicación Solicitud
En fecha 02/02/2024 se realizó Publicación Folleto Solicitud con IET (A1)
Pagos:
06/07/2022 - Pago Tasas IET
Fuente de la información
Parte de la información aquí publicada es pública puesto que ha sido obtenida de la Oficina de Propiedad Industrial de los diferentes países el 29/04/2024 y por lo tanto puede ser que la información no esté actualizada.Parte de la información aquí mostrada ha sido calculada por nuestro sistema informático y puede no ser veraz.
Privacidad
Si considera que al información aquí publicada afecta a su privacidad y desea que eliminemos la información aquí publicada envíe un email a info@patentes-y-marcas.com o rellene el formulario que encontrará aquí.Información sobre el registro de patente nacional por MÉTODO Y SISTEMA DE SIMULACIÓN DE OPERACIONES DE SOLDADURA con el número P202230616
El registro de patente nacional por MÉTODO Y SISTEMA DE SIMULACIÓN DE OPERACIONES DE SOLDADURA con el número P202230616 fue solicitada el 06/07/2022. Se trata de un registro en España por lo que este registro no ofrece protección en el resto de países. El registro MÉTODO Y SISTEMA DE SIMULACIÓN DE OPERACIONES DE SOLDADURA con el número P202230616 fue solicitada por SEABERY SOLUCIONES, S.L. mediante los servicios del agente Nicolás E. ESCUDERO PRIETO. El registro [modality] por MÉTODO Y SISTEMA DE SIMULACIÓN DE OPERACIONES DE SOLDADURA con el número P202230616 está clasificado como G09B 9/00 según la clasificación internacional de patentes.
Otras invenciones solicitadas por SEABERY SOLUCIONES, S.L.
Es posible conocer todas las invenciones solicitadas por SEABERY SOLUCIONES, S.L. entre las que se encuentra el registro de patente nacional por MÉTODO Y SISTEMA DE SIMULACIÓN DE OPERACIONES DE SOLDADURA con el número P202230616. Si se desean conocer más invenciones solicitadas por SEABERY SOLUCIONES, S.L. clicar aquí.Otras invenciones solicitadas en la clasificación internacional de patentes G09B 9/00.
Es posible conocer invenciones similares al campo de la técnica se refiere. El registro de patente nacional por MÉTODO Y SISTEMA DE SIMULACIÓN DE OPERACIONES DE SOLDADURA con el número P202230616 está clasificado con la clasificación G09B 9/00 por lo que si se desea conocer más registros con la clasificación G09B 9/00 clicar aquí.Otras invenciones solicitadas a través del representante NICOLÁS E. ESCUDERO PRIETO
Es posible conocer todas las invenciones solicitadas a través del agente NICOLÁS E. ESCUDERO PRIETO entre las que se encuentra el registro patente nacional por MÉTODO Y SISTEMA DE SIMULACIÓN DE OPERACIONES DE SOLDADURA con el número P202230616. Si se desean conocer más invenciones solicitadas a través del agente NICOLÁS E. ESCUDERO PRIETO clicar aquí.Patentes en España
Es posible conocer todas las invenciones publicadas en España entre las que se encuentra el registro patente nacional por MÉTODO Y SISTEMA DE SIMULACIÓN DE OPERACIONES DE SOLDADURA. Nuestro portal www.patentes-y-marcas.com ofrece acceso a las publicaciones de patentes en España. Conocer las patentes registradas en un país es importante para saber las posibilidades de fabricar, vender o explotar una invención en España.Patentes registradas en la clase G
Es posible conocer todas las patentes registradas en la clase G (FISICA) entre las que se encuentra la patente MÉTODO Y SISTEMA DE SIMULACIÓN DE OPERACIONES DE SOLDADURA con el número P202230616. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase G09
Es posible conocer todas las patentes registradas en la clase G09 (ENSEÑANZA; CRIPTOGRAFIA; PRESENTACION; PUBLICIDAD; PRECINTOS) entre las que se encuentra la patente MÉTODO Y SISTEMA DE SIMULACIÓN DE OPERACIONES DE SOLDADURA con el número P202230616. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase G09B
Es posible conocer todas las patentes registradas en la clase G09B (MATERIAL EDUCATIVO O DE DEMOSTRACION; MEDIOS DE ENSEÑANZA O DE COMUNICACION DESTINADOS A LOS CIEGOS,) entre las que se encuentra la patente MÉTODO Y SISTEMA DE SIMULACIÓN DE OPERACIONES DE SOLDADURA con el número P202230616. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.
¿Tienes alguna duda?
Escribe tu consulta y te responderemos rápida y gratuitamente.

Otras patentes similares
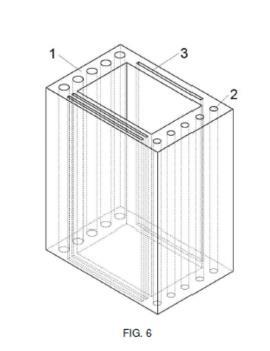
 P202230613
P202230613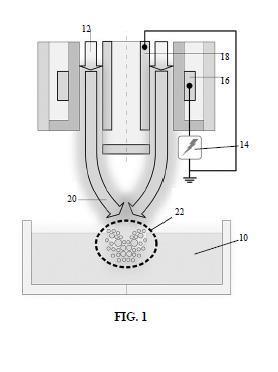 P202230615
P202230615Profesionales Recomendados
Barcelona
933182440
España
933182440
España

Barcelona
+34 93 362 16 97
España
+34 93 362 16 97
España

Barcelona
932 593 600
España
932 593 600
España







