


- Home /
- Publicaciones de patentes /
- MÉTODO PARA LA REALIZACIÓN DE TAREAS EN UN OBJETO Y SISTEMA DE VEHÍCULOS NO TRIPULADOS
Patente nacional por "MÉTODO PARA LA REALIZACIÓN DE TAREAS EN UN OBJETO Y SISTEMA DE VEHÍCULOS NO TRIPULADOS"
Este registro ha sido solicitado por
ARBOREA INTELLBIRD S.L.
Contacto
- Estado: Vigente
- País:
- España
- Fecha solicitud:
- 05/07/2022
- Número solicitud:
-
P202230607
- Número publicación:
-
ES2958408
- Fecha de concesión:
-
- Inventores:
-
Persona física
- Datos del titular:
-
ARBOREA INTELLBIRD S.L.
- Datos del representante:
-
- Clasificación Internacional de Patentes:
- ,G05D 1/00,G05D 1/10,B64F 5/60,G08G 1/0968,G08G 5/00,G08G 7/00,B60W 60/00,G06V 10/40,G06V 10/74,G06T 19/00,G05D 1/628,G05D 1/646,G05D 1/648,G05D 1/661,G05D 1/678,G05D 1/689,G05D 1/692,B64U 10/60,B64U 50/34,B64U 80/25,B64U 80/30
- Clasificación Internacional de Patentes de la publicación:
- ,G05D 1/00,G05D 1/10,B64F 5/60,G08G 1/0968,G08G 5/00,G08G 7/00,B60W 60/00,G06V 10/40,G06V 10/74,G06T 19/00,G05D 1/628,G05D 1/646,G05D 1/648,G05D 1/661,G05D 1/678,G05D 1/689,G05D 1/692,B64U 10/60,B64U 50/34,B64U 80/25,B64U 80/30
- Fecha de vencimiento:
Quiero registrar una patente

Reivindicaciones:
+ ES-2958408_A11. Método para la realización de tareas en un objeto (1) , que se realiza mediante un sistema de vehículos no tripulados (2, 3) que comprende un vehículo base de desplazamiento en superficie (2) y al menos un vehículo huésped de tipo aéreo (3) materialmente conectados por medios para la transmisión de energía eléctrica (9, 10) , comprendiendo el método las siguientes etapas: a. Desplazarse el vehículo base (2) por una ruta sustancialmente definida por el área que ocupa el objeto (1) sobre la superficie en que esté ubicado. b. Despegar el al menos un vehículo huésped (3) desde el vehículo base (2) para la realización de una ruta aérea, que incluye el efectuar al menos una tarea en relación con el objeto (1) . 2. Método para la realización de tareas en un objeto (1) según la reivindicación 1, caracterizado porque el al menos un vehículo huésped (3) opera en modo autónomo conforme a una ruta programada, comprendiendo el método las etapas adicionales de programar la ruta que ha de realizar el al menos un vehículo huésped (3) y, previamente al despegue, transmitir el vehículo base (2) al al menos un vehículo huésped (3) la ruta aérea que este ha de realizar. 3. Método para la realización de tareas en un objeto (1) según la reivindicación 2, caracterizado porque la ruta programada para el al menos un vehículo huésped (3) queda alojada en un sistema de computación externo al vehículo base (2) , comprendiendo el método la etapa de transmitir dicha ruta al vehículo base (2) . 4. Método para la realización de tareas en un objeto (1) según la reivindicación 2, caracterizado porque se ejecuta respecto de un objeto (1) de posición y forma conocidas. 5. Método para la realización de tareas en un objeto (1) según la reivindicación 4, caracterizado porque la ruta que ha de realizar el al menos un vehículo huésped (3) para la inspección de un objeto (1) de posición y forma conocidas ha sido precedentemente diseñada a partir de un modelo tridimensional del mismo objeto (1) o de un objeto idéntico. 6. Método para la realización de tareas en un objeto (1) según la reivindicación 4, caracterizado porque comprende la etapa adicional de ubicar el objeto (1) en una posición predeterminada en el lugar donde se va a ejecutar la inspección. 7. Método para la realización de tareas en un objeto (1) según la reivindicación 4, caracterizado porque comprende la etapa adicional de marcar en el objeto (1) al menos un punto con respecto al cual se ubique espacialmente el al menos un vehículo huésped (3) . 8. Método para la realización de tareas en un objeto (1) según la reivindicación 1, caracterizado porque comprende la etapa adicional de recibir el vehículo base (2) los datos adquiridos por el al menos un vehículo huésped (3) durante la realización de su ruta aérea. 9. Método para la realización de tareas en un objeto (1) según la reivindicación 8, caracterizado porque comprende la etapa adicional de procesar el vehículo base (2) los datos adquiridos por el al menos un vehículo huésped (3) . 10. Método para la realización de tareas en un objeto (1) según la reivindicación 9, caracterizado porque comprende la etapa adicional de que el vehículo base (2) transmite a un sistema de computación externo los datos resultantes del procesamiento de los datos que ha recibido del al menos un vehículo huésped (3) . 11. Sistema de vehículos no tripulados (2, 3) que comprende un vehículo base de desplazamiento en superficie (2) y al menos un vehículo huésped de tipo aéreo (3) , caracterizado porque ambos vehículos (2, 3) están materialmente conectados por medios para la transmisión de energía eléctrica (9, 10) . 12. Sistema de vehículos no tripulados (2, 3) según la reivindicación 11, caracterizado porque está configurado para ejecutar las etapas del método de la reivindicación 1. 13. Sistema de vehículos no tripulados (2, 3) según la reivindicación 11, caracterizado porque ambos vehículos están además materialmente conectados por medios para la transmisión de datos. 14. Sistema de vehículos no tripulados (2, 3) según la reivindicación 13, caracterizado porque está configurado para ejecutar las etapas del método de las reivindicaciones 1 a 10. 15. Sistema de vehículos no tripulados (2, 3) según la reivindicación 13, caracterizado porque comprende un sistema de computación externo al vehículo base (2) , estando el sistema de computación configurado para comunicarse con el vehículo base (2) . 16. Conjunto de software que contiene un sistema operativo y un programa de ordenador que comprende instrucciones para que el sistema de vehículos (2, 3) de la reivindicación 11 ejecute las etapas del método de la reivindicación 1 o para que el sistema de vehículos (2, 3) de la reivindicación 13 ejecute las etapas del método de las reivindicaciones 1 a 10. 17. Medio legible por ordenador que tiene almacenado el programa de ordenador de la reivindicación 16.
Los productos y servicios protegidos por este registro son:
- G05D 1/00 - G05D 1/10 - B64F 5/60 - G08G 1/0968 - G08G 5/00 - G08G 7/00 - B60W 60/00 - G06V 10/40 - G06V 10/74 - G06T 19/00 - G05D 1/628 - G05D 1/646 - G05D 1/648 - G05D 1/661 - G05D 1/678 - G05D 1/689 - G05D 1/692 - B64U 10/60 - B64U 50/34 - B64U 80/25 - B64U 80/30
Descripciones:
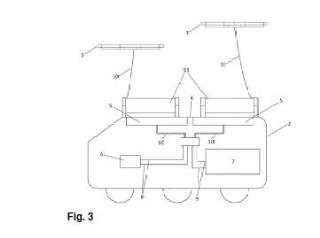
+ ES-2958408_A1 MÉTODO PARA LA REALIZACIÓN DE TAREAS EN UN OBJETO Y SISTEMA DE VEHÍCULOS NO TRIPULADOS SECTOR DE LA TÉCNICA La invención pertenece al sector de los vehículos no tripulados y se refiere a un método para la realización de tareas en un objeto (1) , que se pone en práctica mediante un sistema que comprende un vehículo base no tripulado de desplazamiento en superficie (2) y al menos un vehículo huésped no tripulado de tipo aéreo (3) , materialmente conectado al vehículo base (2) . ANTECEDENTES DE LA INVENCIÓN Los vehículos aéreos no tripulados (también denominados drones o UAV, del inglés Unmanned Aerial Vehicle) pueden ser de muy variadas configuraciones. El más común para usos no militares es el dron de tipo multirrotor, es decir, con varios brazos propulsores. Debido a su capacidad de vuelo estacionario, este es el tipo empleado en determinadas tareas, por ejemplo, de inspección, tal como la inspección de infraestructuras para la detección de defectos materiales. Incluso si las tareas se realizan en ámbitos espaciales reducidos, los drones presentan el problema de su limitada autonomía, debido a que la aeronave ha de efectuar complejas maniobras, mantenerse en vuelo estático, captar datos (por ejemplo, fotografías o vídeo) , o en ocasiones procesarlos a bordo, todo lo cual consume mucha energía. Se han descrito soluciones consistentes en que una aeronave no tripulada aloje a otras más pequeñas, sirviéndoles de plataforma de lanzamiento o prestándoles algún tipo de apoyo logístico, de modo que los vehículos auxiliares realizarán vuelos más cortos o requerirán de menos equipamiento a bordo, todo lo cual les proporciona un ahorro energético. Así por ejemplo en US2019112049A1 Sistema de lanzamiento portátil (TOP FLIGHT TECHNOLOGIES, INC.) , 18.04.2019, cuyo objeto es una primera aeronave que aloja a una segunda aeronave, ambas no tripuladas, siendo la segunda aeronave lanzada para realizar tareas de toma de datos meteorológicos una vez la primera aeronave ha alcanzado un determinado punto durante su vuelo. En los ejemplos conocidos en el estado de la técnica, el vehículo base es también una aeronave no tripulada, por lo que sigue planteándose el problema de la limitada autonomía operativa. Como solución a lo anterior, la presente patente propone un método de realización de tareas en un objeto (1) y un sistema de vehículos no tripulados (2, 3) configurado para la ejecución del método. El sistema de vehículos no tripulados (2, 3) comprende un vehículo base (2) , que se desplaza en superficie y que puede dotarse de una gran capacidad de baterías. El vehículo base (2) está conectado materialmente, mediante cableado (10) , a al menos un vehículo huésped (3) , que es un vehículo no tripulado de tipo aéreo (UAV, Unmanned Aerial Vehicle) (3) cuya alimentación proviene de la batería (7) del vehículo base (2) , lo cual permite aumentar extraordinariamente su autonomía operativa. La vinculación material por medio de cable (10) entre ambos hace que el al menos un vehículo huésped (3) pueda ser considerado un brazo operativo del vehículo base (2) , más que una aeronave con autonomía propia, de modo que la suma de ambos vehículos (2, 3) produce una sinergia que aumenta la autonomía de funcionamiento de la al menos una aeronave no tripulada (3) , su movilidad en áreas complejas, su capacidad de carga de sensores y actuadores y su capacidad de procesado de datos digitales. EXPLICACIÓN DE LA INVENCIÓN En un primer aspecto, la invención se refiere a un método para la realización de tareas en un objeto (1) , método que se pone en práctica mediante un conjunto de vehículos no tripulados (2, 3) que comprende un vehículo base de desplazamiento en superficie (2) y al menos un vehículo huésped de tipo aéreo (3) , comprendiendo el método las etapas definidas en la reivindicación 1. Otros modos de realización preferente se definen en las reivindicaciones dependientes. Debe entenderse por tarea cualquier actuación que realice el sistema de vehículos (2, 3) con respecto al objeto (1) sobre el que se implemente el método. Las tareas pueden estar relacionadas, por ejemplo, con la inspección del objeto (1) , entendiéndose por tal la verificación de su estado, por ejemplo, para la detección de defectos del material (tales como grietas en el fuselaje de un avión o en placas solares de un parque fotovoltaico) , o para controlar su estado (así, controlar el grado de crecimiento de un ultivo vertical o las existencias de un almacén) . Otro propósito de las tareas puede ser alterar el estado físico del objeto (1) , por ejemplo, tareas de reparación o de limpieza. En una primera etapa, el método comprende que el vehículo no tripulado base (2) se desplace por una ruta sustancialmente definida por el área que ocupa el objeto (1) sobre la superficie en que esté ubicado. Así, si se trata de una tarea de inspección que tiene por objeto un avión (1) , el vehículo base (2) se desplazará sustancialmente dentro del área que ocupa el avión (1) sobre el suelo en que esté estacionado, lo que puede incluir tanto seguir su contorno lateral como adentrarse en zonas que quedan debajo del fuselaje y alas. En el ejemplo de tareas de inspección para detectar defectos en placas solares en un parque fotovoltaico, o en tareas de limpieza o reparación de tales placas, el vehículo base (2) se desplazará por los pasillos del parque fotovoltaico, que delimitan el área en la que se ubican los paneles sobre el suelo, pudiendo asimismo adentrarse en zonas por debajo de dichos paneles. O si, en otro de los ejemplos mencionados, la tarea consiste en controlar existencias en un almacén, la ruta del vehículo base (2) se hará sustancialmente a lo largo de los pasillos del almacén. El vehículo base (2) puede tener su ruta programada con antelación, por lo que operaría en modo autónomo. La programación de esta ruta es convencional, máxime teniendo en cuenta que, por lo general, el recorrido terrestre del vehículo base (2) estará compuesto de distintas trayectorias predecibles. Cabe también que un operador conduzca el vehículo base (2) presencialmente mediante un dispositivo de control remoto. En ambos casos, debe entenderse que el desplazamiento del vehículo base (2) puede ser continuo, o puede incluir paradas a lo largo de su ruta, previamente programadas o a discreción del piloto humano. Una segunda etapa comprende que el al menos un vehículo huésped de tipo aéreo (3) , despegue desde el vehículo base (2) para la realización de una ruta aérea, efectuando durante el transcurso de la ruta al menos una tarea en relación con el objeto (1) , por ejemplo, cuando se trate de una inspección efectuará el menos una tarea de toma de datos. El al menos un vehículo aéreo (3) puede ser pilotado presencialmente, mediante un piloto humano que, provisto de un dispositivo de control remoto, se halla en el lugar y que puede ser el mismo que esté a cargo de dirigir presencialmente el vehículo base (2) . El pilotaje presencial tiene los inconvenientes de su mayor coste y del riesgo de colisión por error humano con el objeto inspeccionado, lo que puede ser muy dañino si se trata, por ejemplo, del fuselaje de un avión (1) . Para salvar los mencionados inconvenientes, en un modo de realización el al menos un vehículo aéreo (3) no es pilotado presencialmente, sino que opera en modo autónomo. En un modo de realización de esta operación en modo autónomo, al vehículo aéreo (3) se le irán transmitiendo las órdenes para su adecuado posicionamiento espacial, según técnicas conocidas. Esta transmisión se efectuará desde el vehículo base (2) o desde un sistema de computación externo al vehículo base (2) . En otro modo de realización, el vuelo en modo autónomo se efectúa conforme a una ruta programada con antelación, lo que es conocido en la técnica. En un ejemplo, la ruta programada para el al menos un vehículo huésped (3) queda alojada en un sistema de computación a bordo del vehículo base (2) , desde donde se transmite la ruta al al menos un vehículo huésped (3) . En un modo de realización alternativo, la ruta programada para el al menos un vehículo huésped (3) queda alojada en un sistema de computación externo al vehículo base (2) , normalmente bajo control de la entidad a cargo de las tareas. En este supuesto, el método comprende la etapa de transmitir dicha ruta al vehículo base (2) , para que este a su vez pueda transmitirla al al menos un vehículo huésped (3) . La operativa de drones (3) en vuelo autónomo conforme a una ruta preprogramada plantea problemas, derivados de que, como en la ruta se pueden presentar obstáculos de todo tipo, la aeronave (3) normalmente deberá estar equipada con componentes electrónicos que le doten de capacidades del tipo detectar-evitar obstáculos autónomamente y detectar-actuar, esto es, detectar los puntos o elementos en los que se requiera llevar a cabo una actuación (por ejemplo, captación de imágenes) . Estos componentes, por un lado, incrementan el consumo de energía del dron (3) , lo que, en la presente invención, queda paliado por la conexión de alimentación eléctrica (9, 10) entre el vehículo base (2) y el vehículo aéreo (3) y por otro, aumentan el peso y tamaño del dron (3) , lo que dificulta su maniobrabilidad. Para solventar el problema planteado, en un modo de realización el método se implementa en un objeto de posición y forma conocidas. Por "objeto de posición y forma onocidas" debe entenderse un objeto cuya ubicación y diseño espacial son únicos. Puede tratarse de un objeto de ubicación fija e inamovible, por ejemplo, una infraestructura, como un gasoducto o un parque fotovoltaico concretos, que no pueden variar de ubicación. Puede asimismo tratarse de un objeto móvil, como un determinado modelo de avión (1) , pues al ser producidos en serie, todos los modelos serán idénticos, por lo que la forma del objeto será conocida. Para conseguir que la posición de estos objetos también sea conocida, cuando el método se implemente sobre ellos, una etapa del método consistirá en ubicarlo en una localización predeterminada en el lugar en que vayan a realizarse las tareas. En este mismo supuesto de objeto (1) de forma conocida pero de posición móvil, alternativamente se puede lograr que su posición sea conocida estableciendo en el objeto (1) uno o más puntos de localización con respecto a los cuales se ubique espacialmente el al menos un vehículo huésped. Igualmente, se considerará que son objetos de posición y forma conocidas determinadas estructuras ubicadas en el interior de lugares de producción, por ejemplo, las paredes dedicadas a cultivos verticales dentro de una determinada explotación agraria. También se considerará un objeto de posición y forma conocidas el volumen predeterminado que, dentro de un almacén, es susceptible de ser ocupado por las cajas donde se almacenan existencias de materia prima o de productos fabricados. Esto es así porque, si bien el número de cajas puede variar, el volumen que puedan ocupar todas ellas es conocido de antemano. En este modo de realización, la invención propone diseñar la ruta tomando en consideración la mencionada circunstancia de que la ruta se realizará respecto a un objeto de posición y forma conocidas. En un modo de diseñar una ruta, en primer lugar, se obtiene un modelo tridimensional del objeto a inspeccionar, para lo cual una posibilidad conocida en la técnica es escanear un objeto de referencia (por ejemplo, un avión del mismo modelo, o la estructura específica de que se trate) con dispositivos como un sensor LIDAR, sensores o cámaras fotogramétricas. De la operación de escaneo resulta una nube de puntos a partir de la cual se genera el modelo en tres dimensiones del objeto. Dicho modelo tridimensional es el que se tomará como base para configurar la ruta, mediante pasos consistentes en detectar el objeto a partir de la nube de puntos, calcular unos puntos de parada del vehículo huésped (3) en puntos de la nube de puntos asociados a elementos del objeto, convertir los puntos de parada en una secuencia de puntos espaciales de posicionamiento o waypoints y programar tareas (por ejemplo, de captación de datos) asociadas a todos o algunos de los waypoints, onfigurando así una ruta programable. Convenientemente, la ruta podrá emplearse cuantas veces sea necesario inspeccionar el mismo objeto (por ejemplo, para sucesivos mantenimientos de la misma infraestructura, o del mismo modelo de avión que haya servido de base para el diseño de la ruta) . El documento de patente WO2022/023594 "Sistema y procedimiento de inspección de infraestructuras" (ARBOREA INTELLBIRD, S.L.) , 03/02/2022, describe cómo obtener una ruta de navegación para una aeronave no tripulada operando en modo autónomo tomando como referencia una infraestructura, lo cual es aplicable a la presente patente, en tanto una infraestructura es un objeto de posición y forma conocidas. En un modo de realización, el método comprende la etapa adicional de recibir el vehículo base (2) los datos adquiridos por el al menos un vehículo huésped (3) durante la realización de su ruta aérea. En un modo de realización, el método comprende la etapa adicional de procesar el vehículo base (2) los datos adquiridos por el al menos un vehículo huésped (3) . La concentración de las capacidades de procesamiento en el vehículo base (2) permite liberar al dron (3) de los complejos dispositivos electrónicos que se requerirían si hubiera de estar dotado de capacidad de procesamiento a bordo. En un modo de realización, el método comprende la etapa adicional de que el vehículo base (2) transmita a un sistema de computación externo los datos resultantes del procesamiento de los datos que ha recibido del al menos un vehículo huésped (3) . En un segundo aspecto, la invención tiene por objeto un sistema de vehículos no tripulados (2, 3) que comprende un vehículo base de desplazamiento en superficie (2) y al menos un vehículo huésped de tipo aéreo (3) . Son vehículos no tripulados los que no llevan un piloto humano a bordo. Estos vehículos pueden ser pilotados por un piloto humano presencialmente, el cual tiene al vehículo en su campo visual (pilotaje VLOS, del inglés Visual Line of Sight) , sin perjuicio de que sea ayudado por sensores a bordo del vehículo que le permitan mantener una consciencia situacional de la aeronave en los momentos en que esta pueda quedar fuera de su campo de visión. Los vehículos no tripulados asimismo pueden pilotarse por un piloto humano situado remotamente respecto al vehículo, operación que se efectúa a través e las imágenes y datos de posicionamiento que transmite el vehículo; o pueden operar autónomamente. Por vehículo base de desplazamiento en superficie (2) debe entenderse tanto un vehículo no tripulado terrestre (2) (conocidos como UGV, del inglés Unmanned Ground Vehicle o vehículo terrestre no tripulado) , como un vehículo acuático de superficie (USV, del inglés Unmanned Surface Vehicle o vehículo no tripulado de superficie acuática, por oposición al denominado UUV, Unmanned Underwater Vehicle o vehículo no tripulado subacuático, no incluido en esta patente) . Ambos tipos de vehículos son aptos para integrarse en el sistema de vehículos no tripulados (2, 3) de la patente, en tanto se puede habilitar en ellos una plataforma superior (4) que pueda servir de base al al menos un vehículo no tripulado aéreo (3) . El vehículo base (2) y el al menos un vehículo aéreo (3) mantienen una relación de dependencia que, en un modo de realización, se concreta en una conexión material mediante medios para la transmisión de energía eléctrica (9, 10) . De este modo, el al menos un vehículo huésped (3) recibe su alimentación desde el vehículo base (2) , por lo que no necesita una instalación de batería, lo cual permite simplificar su construcción y disminuir su tamaño. Este sistema de vehículos está configurado para ejecutar las etapas del método de la reivindicación 1. En otro modo de realización, la conexión entre ambos tipos de vehículos (2, 3) incluye además medios para la transmisión de datos (8, 10) , con lo cual el al menos un vehículo huésped recibe (3) y transmite datos a través de la conexión directa (10) con el vehículo base (2) , por lo que los vehículos (2, 3) no necesitan operar en entornos en que haya conexión Wifi y ni siquiera necesitan estar conectados mediante radio. Este sistema de vehículos (2, 3) está configurado para ejecutar las etapas del método de las reivindicaciones 1 a 10. En un modo de realización, el sistema de vehículos no tripulados (2, 3) dotado de doble conexión de alimentación y datos (10) comprende un sistema de computación externo al vehículo base (2) , configurado para comunicarse con el vehículo base (2) . Dicho sistema de computación puede ser un dispositivo portátil de telecomunicación, esto es, un teléfono móvil inteligente (smartphone) , tableta, ordenador portátil o ualquier otro tipo de dispositivo portátil que permita la comunicación telemática, incluida vía Wifi o por redes inalámbricas de área personal (WPAN) con arreglo al estándar Bluetooth® u otros sistemas de comunicación radio. Asimismo, el sistema de computación externo al vehículo base puede ser un servidor remoto con capacidad de comunicación telemática. Este sistema puede estar configurado para comunicarse directamente con el vehículo base (2) , con el dispositivo portátil de telecomunicación o con ambos. Finalmente, la presente invención se refiere a un conjunto de software que contiene un sistema operativo y un programa de ordenador que comprende instrucciones para que el sistema de vehículos (2, 3) ejecute el método reivindicado. Otro objeto de la invención es un medio legible por ordenador que tiene almacenado dicho programa de ordenador. La invención aquí descrita permite un desdoblamiento de tareas complementarias entre el vehículo base de desplazamiento en superficie (2) y el al menos un vehículo huésped de tipo aéreo (3) , que refuerza la eficiencia del conjunto cuando, como aquí se propone, se emplea para la realización de tareas en objetos (1) : los recorridos del vehículo base (2) consumen relativamente poca energía, al ser realizados en superficie, sea terrestre o acuática, en vez de por el aire. No habiendo limitaciones significativas de tamaño, puede escogerse un vehículo base (2) dotado del número o potencia de baterías (7) que le confieran una autonomía operativa, y consiguiente capacidad de alimentación del al menos un vehículo huésped (3) , tan grande como se desee. Por otra parte, al tomar su alimentación, y, en un modo de realización, poder recibir los datos directamente del vehículo base (2) , el al menos un vehículo huésped (3) no necesitará baterías ni sensores complejos de posicionamiento y su unidad de control será más pequeña y sencilla que la de un vehículo que hubiera de ser empleado en tales tareas sin el auxilio de un vehículo base. Esto permite utilizar vehículos huéspedes (3) de pequeño tamaño, con mayor capacidad de maniobra y menor riesgo de daños en el objeto de inspección en caso de contacto accidental. Además, se podrá dotar al vehículo aéreo (3) de un amplio rango de sensores para la realización de las tareas encomendadas, sin menoscabar por ello su autonomía operacional, porque la alimentación extra que ello suponga la tomará del vehículo base (2) . La vinculación material entre ambos tipos de vehículos (2, 3) y su capacidad para operar en movimiento simultáneo limitan el radio de acción de los drones (3) a la longitud del cable que los una al vehículo base (2) , que debido a la combinación de movimientos simultáneos de ambos vehículos (2, 3) , puede er de extensión muy contenida con lo cual no se plantean problemas de riesgo para el tráfico aéreo. BREVE DESCRIPCIÓN DE LOS DIBUJOS Para complementar la descripción se acompaña un juego de dibujos, que con carácter ilustrativo y no limitativo representan lo siguiente: Figura 1.- Vista superior de un sistema compuesto por un vehículo base de desplazamiento en superficie terrestre y dos vehículos huéspedes de tipo aéreo efectuando tareas relacionadas con la inspección de un avión. Figura 2.- Mismos sistema y objeto de la figura anterior, en una vista lateral. Figura 3.- Corte en sección longitudinal de un sistema compuesto por un vehículo no tripulado base de desplazamiento en superficie terrestre, con dos vehículos huéspedes de tipo aéreo representados en vuelo. Figura 4.- Vehículo base de desplazamiento en superficie terrestre con dos vehículos huéspedes de tipo aéreo acoplados en sus correspondientes cavidades. REALIZACIÓN PREFERENTE DE LA INVENCIÓN En un primer aspecto, la presente invención tiene por objeto un método para la realización de tareas en un objeto (1) , que se implementa mediante un sistema de vehículos no tripulados (2, 3) que comprende un vehículo base de desplazamiento en superficie (2) y al menos un vehículo huésped de tipo aéreo (3) . El método puede realizarse sobre objetos del tipo de los que ejemplificativamente se han descrito en el apartado precedente, entre ellos, las aeronaves tripuladas convencionales, sean de pasajeros, de carga o militares. Estas aeronaves están sujetas a exhaustivos programas de mantenimiento, los cuales incluyen inspecciones visuales de su fuselaje y alas llevadas a cabo por inspectores certificados, aparte de las inspecciones adicionales que los mecánicos de la operadora de la aeronave puedan realizar. Estas tareas son muy onerosas para las compañías, por el coste del personal specializado y por el tiempo en que las aeronaves han de permanecer inoperativas. A este tipo de tareas se le puede aplicar ventajosamente la presente invención. Así, en un modo de realización preferente, que se ilustra esquemáticamente en las Figuras 1 y 2, las tareas que forman parte del método son tareas de inspección y el objeto en el que se realizan es un avión (1) de línea comercial de un determinado fabricante y modelo. Dado que todos los ejemplares del mismo modelo serán idénticos, se trata de un objeto (1) de forma conocida, en el sentido dado a esta expresión en la presente patente. No obstante, al ser un objeto (1) móvil, su ubicación espacial no será siempre la misma. Para que el ejemplar de avión (1) específico sobre el que se va a implementar el método sea un objeto (1) de posición conocida, el avión (1) se ubicará en una posición preestablecida en el lugar donde se realice la inspección, a cuyo fin se habrán practicado unas marcas en el suelo que señalen la posición que deban ocupar sus ruedas delanteras y traseras. Todas las inspecciones que se realicen sobre ese mismo avión (1) o sobre otras unidades del mismo modelo, requerirán que el avión (1) quede estacionado en la misma posición en el mismo lugar de inspección. Alternativamente, cuando las operaciones no se vayan a realizar en dicho punto de estacionamiento fijo, se marcarán en el avión (1) dos puntos, en el morro y en el extremo de un ala, configurados para que los drones puedan ubicarse espacialmente respecto a ellos. Esta operación de marcado se realiza por medios conocidos, como un sensor (por ejemplo, láser LIDAR de medición puntual) , o bien practicando en los mencionados puntos, a los solos fines de la inspección, sendas marcas visuales detectables mediante visión computerizada (por ejemplo, adhesivos removibles que contengan un código QR) . En un momento anterior en el tiempo, sobre la misma u otra unidad del mismo modelo de avión (1) se habrán llevado a cabo las operaciones necesarias para diseñar una ruta adaptada a la forma específica de ese modelo de avión (1) , operaciones que han sido explicadas precedentemente en este documento. Por ello, la ruta que los vehículos aéreos huéspedes (3) van a realizar ya está programada con antelación a la ejecución de las tareas. En un modo de realización, el método de inspección se realiza mediante un sistema de vehículos no tripulados (2, 3) que comprende un vehículo base de desplazamiento en superficie, en concreto, un vehículo no tripulado terrestre (UGV) (2) . De este vehículo base (2) dependen dos vehículos huéspedes de tipo aéreo (3) . Este conjunto de ehículos huéspedes de tipo aéreo (3) operaría de manera coordinada, lo que en el estado de la técnica se conoce como vuelo en enjambre. El emplear varios vehículos aéreos (3) permite repartir entre ellos las tareas, dotándoles de distintos tipos de sensores. En función del volumen del objeto (1) en el que se realicen las tareas o por necesidades logísticas, con respecto al mismo objeto (1) se podrán emplear dos o más sistemas de vehículos no tripulados (2, 3) . A los efectos de esta patente, por "sistema de vehículos no tripulados" (2, 3) debe entenderse un vehículo base de desplazamiento en superficie (2) al que esté conectado al menos un vehículo huésped de tipo aéreo (2) . El empleo de vehículos base (2) adicionales, con cualquier número de vehículos huéspedes (3) conectados a ellos, no significará que ha variado la configuración del sistema de vehículos (2, 3) , sino que se están empleando varios sistemas (2, 3) simultáneamente. En el modo de realización que aquí se ejemplifica, el vehículo base (2) opera en modo autónomo conforme a una ruta que se le ha introducido en su unidad de control con anterioridad y que ha sido diseñada en el modo ejemplificativamente descrito. En otro modo de realización, el vehículo base (2) puede ser dirigido presencialmente mediante un control remoto o por cable. La ruta a realizar por los vehículos de tipo aéreo (3) puede estar alojada en la unidad de control del vehículo base (2) . Así, llegado el momento en que deban dar comienzo las operaciones de inspección, dicha ruta será transmitida a los vehículos huéspedes (3) por el vehículo base (2) . En otro ejemplo de realización, la ruta de inspección puede está alojada en un sistema de computación externo al vehículo base (2) , bajo control de la entidad responsable del mantenimiento del avión (1) , en cuyo caso, llegado el momento de comienzo de las operaciones, la ruta será transmitida al vehículo base (2) desde el sistema de computación, vía Wifi o radio. Una vez que el avión (1) está ubicado en el lugar donde va a llevarse a cabo la inspección, el operador de la entidad de mantenimiento determinará el momento en que debe comenzar la ejecución del método. Una vez da comienzo, se producirán dos tipos de desplazamiento del sistema de vehículos no tripulados (2, 3) : por un lado, el vehículo base (2) se desplazará por una ruta en superficie, en este caso terrestre, sustancialmente dentro del área que ocupa el avión (1) sobre el suelo en que esté estacionado, lo que puede incluir tanto seguir su contorno lateral como adentrarse en onas que quedan debajo del fuselaje y alas. Y los vehículos huéspedes aéreos (3) despegarán desde el vehículo base (2) para la realización de su correspondiente ruta aérea en el entorno del avión (1) . Ambos tipos de desplazamientos pueden ser simultáneos, de modo que, al tiempo que el vehículo base (2) se desplaza, los vehículos huéspedes (3) despegan y efectúan su ruta. O pueden realizarse en momentos sucesivos, de modo que, mientras el vehículo base (2) se desplaza hasta un punto intermedio de su ruta, los vehículos huéspedes (3) se mantienen estáticos en el vehículo base (2) , del que despegan cuando el vehículo base (2) se para en los puntos intermedios. Los datos que los vehículos huéspedes (3) van adquiriendo a medida que realizan su ruta son recibidos en el vehículo base (2) . En un ejemplo de realización, esta transmisión-recepción es en tiempo real. En otros modos de realización, se puede realizar por volcado de datos una vez los vehículos huéspedes (3) hayan retornado al vehículo base (2) . En un modo de realización, el vehículo base (2) realiza a bordo tareas de procesamiento de los datos recibidos de los vehículos huéspedes (3) . El grado de procesamiento del material recibido será mayor o menor en función de las preferencias del responsable del servicio. Así, el vehículo base (2) puede emitir un informe completo o realizar un preprocesado de la información. En un modo de realización, el resultado de las tareas de procesamiento y análisis se recoge en un archivo codificado estableciendo alertas y posiciones de las anomalías detectadas. Concluido el procesamiento asignado al vehículo base (2) , el archivo codificado se transmite al sistema de computación externo. De este modo, se evita tener que enviar a dicho sistema de computación todos los datos adquiridos por los vehículos huéspedes (3) , lo que supondría un ingente volumen de información. El método descrito puede implementarse para la realización de cualesquiera tareas que se realicen respecto de un objeto. Así, el método es susceptible de aplicación en tareas de inspección y mantenimiento de bandejas de cultivo en cultivos verticales, por lo cual se trataría de un ejemplo de realización de tareas en relación con un objeto de posición y forma conocidas. En un modo de implementación del método para este tipo de tarea, el vehículo base de desplazamiento en superficie es un UGV, que se desplaza por una ruta preprogramada por los pasillos entre las estructuras de soporte de las bandejas. Dos aeronaves no tripuladas despegan del UGV para la realización de rutas preprogramadas, incluyendo sus tareas el desplazamiento por el contorno de las sucesivas bandejas verticales para, con la ayuda de sensores específicos como cámaras multiespectrales, verificar el estado tanto de los cultivos como de los elementos estructurales. Los datos recabados son transmitidos a través del cable al vehículo base, que los procesa y transmite a un sistema de computación externo localizado en la planta de producción. En otro ejemplo, el método se implementa en relación con tareas de control de existencias en un almacén logístico. El control a cargo de personas es costoso y limita las posibilidades de almacenamiento en altura de las cajas que contienen las existencias. Mediante el método reivindicado, el vehículo base de desplazamiento en superficie sería igualmente un UGV, que se desplaza por una ruta preprogramada por los pasillos a lo largo de los cuales se alinean las estructuras de apilamiento de las cajas. Dos drones despegan del UGV para la realización de sendas rutas preprogramadas, incluyendo sus tareas el desplazamiento por el contorno de las estructuras para, con la ayuda de sensores específicos, como lectores de códigos de barras o QR, leer los códigos de las cajas. La realización de la tarea mediante el sistema propuesto permite solventar limitaciones de altura de las cajas, sin más que disponer cables de alimentación de los drones con la longitud necesaria. Los datos recabados son transmitidos a través del cable al vehículo base, que los procesa, generando listados de inventario que transmite a un sistema de computación localizado en las oficinas del almacén logístico. De modo sustancialmente idéntico, el método puede implementarse para la realización de tareas de inspección en plantas solares térmicas y fotovoltaicas. En este modo de realización, el vehículo base de desplazamiento en superficie sería igualmente un UGV, que se desplaza por una ruta preprogramada por los pasillos definidos por las hileras de paneles. Dos drones despegan del vehículo base con la tarea de desplazarse respectivamente por la parte inferior y superior de los paneles, barriéndolas con sensores termográfico-radiométricos y con un sensor visible. Los datos adquiridos y sus metadatos de posición asociados son transmitidos al vehículo base donde son procesados en tiempo real mediante software para detectar anomalías y crear alertas que son remitidas a un sistema de computación localizado en la estación de control de la planta solar. Un tercer dron dependiente del mismo vehículo base realiza tareas de impieza de la cara superior de los paneles, a cuyo efecto está provisto de cepillos giratorios. En un segundo aspecto, la presente invención tiene por objeto un sistema de vehículos no tripulados (2, 3) que comprende un vehículo base de desplazamiento en superficie (2) y al menos un vehículo huésped de tipo aéreo (3) . Para ejemplificar un modo de realización del sistema de vehículos, la Fig. 3 representa, en un corte de sección longitudinal, un vehículo base de tipo terrestre (2) conectado a dos aeronaves no tripuladas (3) . Como vehículo de tipo terrestre (2) puede usarse un UGV convencional, movido por al menos un motor eléctrico o térmico que transmite su energía a unas ruedas. La configuración del vehículo (2) para adaptarlo convenientemente a la realización del tipo de tareas de que se trate puede ser realizada por el experto en la materia. En un modo de realización del UGV (2) , en su parte superior se dispone una plataforma (4) , que sirve de base de despegue y aterrizaje a las aeronaves huéspedes (3) . La plataforma (4) presenta dos cavidades (5) configuradas para albergar sendos vehículos huéspedes de tipo aéreo (3) . El UGV (2) está dotado de una unidad de control (6) con un dispositivo de procesamiento informático, que comprende un microcontrolador estándar, el cual gestiona el funcionamiento del motor del vehículo. En un modo de realización, la unidad de control del vehículo base comprende un sistema de procesado y computación en tiempo real que le permita analizar las imágenes y datos transmitidos por las aeronaves huéspedes (3) , mediante recursos de inteligencia artificial, por ejemplo, de visión computarizada y análisis de nubes de puntos LIDAR y fotogramétricas. El vehículo base (2) está equipado con una o más baterías (7) , cuya capacidad se seleccionará en función de criterios como el nivel de procesamiento que la unidad de control vaya a realizar o la previsible duración de las tareas a las que se vaya a dedicar habitualmente el vehículo base (2) . En un modo preferido de realización, el vehículo base de tipo terrestre (2) está materialmente conectado a los dos vehículos aéreos (3) por medios tanto para la transmisión de energía eléctrica (9, 10) como para la transmisión de datos (8, 10) . A tal in, de la unidad de control (6) emergen dos cables de fibra óptica (8) y de la batería (7) , dos cables eléctricos (9) . Cada par de cables (8, 9) confluye y se une en un único cable (10) que incluye conductos separados y aislados para la corriente eléctrica y para la fibra óptica. Cada uno de estos dos cables dobles (10) se conecta con una aeronave (3) , a través de sendos orificios practicados en la base de las cavidades (5) . La longitud del cable de conexión (10) entre el vehículo base (2) y cada vehículo aéreo (3) se escogerá en función de factores como la altura del objeto (1) en el que se realicen las tareas o la extensión del área que los drones (3) hayan de cubrir. Para el manejo de los cables (10) , se disponen en la plataforma sendos dispositivos de enrollado (11) , conocidos en el estado de la técnica, que permiten el despliegue y recogida de los cables (10) a medida que las aeronaves (3) se alejen o acerquen al vehículo base (2) . La Fig. 4 muestra el mismo sistema de vehículos (2, 3) que se ha descrito, en una vista de tres cuartos que muestra a los dos vehículos huéspedes de tipo aéreo (3) acoplados en sus correspondientes cavidades (5) de la plataforma superior (4) del vehículo base (2) , con los dispositivos de enrollado de cable (11) sobre dicha plataforma (4) . En el modo de realización que se propone, los vehículos huéspedes de tipo aéreo (3) son drones del tipo multirrotor, esto es, de los que comprenden varios rotores asociados a sendos motores de propulsión. Este tipo de configuración permite aterrizajes y despegues verticales y el vuelo estacionario, por lo que este tipo es el más apto para la realización de las tareas propias del método reivindicado. Estas aeronaves (3) estarán equipadas con unos u otros dispositivos de navegación y adquisición de datos según sea la índole de la tarea asignada, siendo esta una operación conocida por el experto en la materia. Ejemplificativamente, en cuando a dispositivos de navegación las aeronaves (3) están equipadas con un sistema de posicionamiento por satélite capaz de conectarse a varias redes satélites, como GPS, GLONASS, BeiDou o GALILEO. Asimismo, estarían dotadas de un sensor básico de detección y evitación de obstáculos. Adicionalmente, el UAV está dotado de un sistema de posicionamiento de alta precisión, por ejemplo, un sistema del tipo RTK (Real-Time Kinematics) . Cuando las tareas se ejecuten en un recinto, los sistemas de posicionamiento de las aeronaves no tripuladas se pueden conjugar con unas balizas de posicionamiento que se ubicarán en el recinto. Para los fines de adquisición de datos, las aeronaves (3) están dotadas de dispositivos periféricos, que en el ejemplo de realización que se está describiendo pueden omprender una cámara visible de alta resolución, una cámara termográfica (cuando se trate de inspecciones sobre fuselajes de composite) , un sensor láser para detectar abolladuras, cámaras fotográficas o de vídeo, cámaras de espectro térmico por infrarrojos o sensores LIDAR de barrido, láser para el contrastado visible de irregularidades, y un sensor tipo palpador como los que lleva a bordo la aeronave del documento patente EP3392652 A1 (ARBOREA INTELLBIRD SL) , 24/10/2018 Método para inspeccionar materiales y aeronave para implementar dicho método, [0023], o de tipo ultrasónico. En un modo de realización, el sistema de vehículos (2, 3) comprende un sistema de computación externo al vehículo base (2) . Este sistema de computación puede ser un dispositivo portátil de telecomunicación, sea un teléfono móvil inteligente (smartphone) , tableta, ordenador portátil. En otro modo de realización, puede ser un servidor remoto, que según un ejemplo de realización, comprende los siguientes componentes: al menos un circuito que integra procesadores multinúcleo, una placa base, unidades de memoria RAM, medios de almacenamiento, una tarjeta gráfica configurada para procesar gran volumen de información en forma de imágenes; fuente de alimentación, medios de refrigeración y tarjeta de red y de comunicaciones, por ejemplo un sistema basado en comunicación tipo router con tarjeta SIM. En experto en la materia, en función de las necesidades previsibles, podrá configurar dicho servidor remoto con equipamientos de más o menos capacidad de entre los disponibles en el estado de la técnica. En otro modo de realización, el sistema de computación combina los mencionados dispositivo portátil de comunicación y servidor remoto. El sistema de computación externo al vehículo base (2) está configurado para comunicarse con el vehículo base (2) . Esta comunicación bidireccional puede efectuarse mediante Wifi, por redes inalámbricas de área personal (WPAN) con arreglo al estándar Bluetooth® o en tiempo real mediante un protocolo de comunicación de baja latencia, por ejemplo, un protocolo de comunicación 5G.
Publicaciones:
ES2958408 (08/02/2024) - A1 Solicitud de patente con informe sobre el estado de la técnica
Eventos:
En fecha 05/07/2022 se realizó Registro Instancia de Solicitud
En fecha 05/07/2022 se realizó Admisión a Trámite
En fecha 05/07/2022 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 21/07/2022 se realizó Superado examen de oficio
En fecha 03/10/2022 se realizó Realizado IET
En fecha 05/10/2022 se realizó 1109P_Comunicación Traslado del IET
En fecha 08/02/2024 se realizó Publicación Solicitud
En fecha 08/02/2024 se realizó Publicación Folleto Solicitud con IET (A1)
Pagos:
05/07/2022 - Pago Tasas IET
+ ES-2958408_A11. Método para la realización de tareas en un objeto (1) , que se realiza mediante un sistema de vehículos no tripulados (2, 3) que comprende un vehículo base de desplazamiento en superficie (2) y al menos un vehículo huésped de tipo aéreo (3) materialmente conectados por medios para la transmisión de energía eléctrica (9, 10) , comprendiendo el método las siguientes etapas: a. Desplazarse el vehículo base (2) por una ruta sustancialmente definida por el área que ocupa el objeto (1) sobre la superficie en que esté ubicado. b. Despegar el al menos un vehículo huésped (3) desde el vehículo base (2) para la realización de una ruta aérea, que incluye el efectuar al menos una tarea en relación con el objeto (1) . 2. Método para la realización de tareas en un objeto (1) según la reivindicación 1, caracterizado porque el al menos un vehículo huésped (3) opera en modo autónomo conforme a una ruta programada, comprendiendo el método las etapas adicionales de programar la ruta que ha de realizar el al menos un vehículo huésped (3) y, previamente al despegue, transmitir el vehículo base (2) al al menos un vehículo huésped (3) la ruta aérea que este ha de realizar. 3. Método para la realización de tareas en un objeto (1) según la reivindicación 2, caracterizado porque la ruta programada para el al menos un vehículo huésped (3) queda alojada en un sistema de computación externo al vehículo base (2) , comprendiendo el método la etapa de transmitir dicha ruta al vehículo base (2) . 4. Método para la realización de tareas en un objeto (1) según la reivindicación 2, caracterizado porque se ejecuta respecto de un objeto (1) de posición y forma conocidas. 5. Método para la realización de tareas en un objeto (1) según la reivindicación 4, caracterizado porque la ruta que ha de realizar el al menos un vehículo huésped (3) para la inspección de un objeto (1) de posición y forma conocidas ha sido precedentemente diseñada a partir de un modelo tridimensional del mismo objeto (1) o de un objeto idéntico. 6. Método para la realización de tareas en un objeto (1) según la reivindicación 4, caracterizado porque comprende la etapa adicional de ubicar el objeto (1) en una posición predeterminada en el lugar donde se va a ejecutar la inspección. 7. Método para la realización de tareas en un objeto (1) según la reivindicación 4, caracterizado porque comprende la etapa adicional de marcar en el objeto (1) al menos un punto con respecto al cual se ubique espacialmente el al menos un vehículo huésped (3) . 8. Método para la realización de tareas en un objeto (1) según la reivindicación 1, caracterizado porque comprende la etapa adicional de recibir el vehículo base (2) los datos adquiridos por el al menos un vehículo huésped (3) durante la realización de su ruta aérea. 9. Método para la realización de tareas en un objeto (1) según la reivindicación 8, caracterizado porque comprende la etapa adicional de procesar el vehículo base (2) los datos adquiridos por el al menos un vehículo huésped (3) . 10. Método para la realización de tareas en un objeto (1) según la reivindicación 9, caracterizado porque comprende la etapa adicional de que el vehículo base (2) transmite a un sistema de computación externo los datos resultantes del procesamiento de los datos que ha recibido del al menos un vehículo huésped (3) . 11. Sistema de vehículos no tripulados (2, 3) que comprende un vehículo base de desplazamiento en superficie (2) y al menos un vehículo huésped de tipo aéreo (3) , caracterizado porque ambos vehículos (2, 3) están materialmente conectados por medios para la transmisión de energía eléctrica (9, 10) . 12. Sistema de vehículos no tripulados (2, 3) según la reivindicación 11, caracterizado porque está configurado para ejecutar las etapas del método de la reivindicación 1. 13. Sistema de vehículos no tripulados (2, 3) según la reivindicación 11, caracterizado porque ambos vehículos están además materialmente conectados por medios para la transmisión de datos. 14. Sistema de vehículos no tripulados (2, 3) según la reivindicación 13, caracterizado porque está configurado para ejecutar las etapas del método de las reivindicaciones 1 a 10. 15. Sistema de vehículos no tripulados (2, 3) según la reivindicación 13, caracterizado porque comprende un sistema de computación externo al vehículo base (2) , estando el sistema de computación configurado para comunicarse con el vehículo base (2) . 16. Conjunto de software que contiene un sistema operativo y un programa de ordenador que comprende instrucciones para que el sistema de vehículos (2, 3) de la reivindicación 11 ejecute las etapas del método de la reivindicación 1 o para que el sistema de vehículos (2, 3) de la reivindicación 13 ejecute las etapas del método de las reivindicaciones 1 a 10. 17. Medio legible por ordenador que tiene almacenado el programa de ordenador de la reivindicación 16.
Los productos y servicios protegidos por este registro son:
- G05D 1/00 - G05D 1/10 - B64F 5/60 - G08G 1/0968 - G08G 5/00 - G08G 7/00 - B60W 60/00 - G06V 10/40 - G06V 10/74 - G06T 19/00 - G05D 1/628 - G05D 1/646 - G05D 1/648 - G05D 1/661 - G05D 1/678 - G05D 1/689 - G05D 1/692 - B64U 10/60 - B64U 50/34 - B64U 80/25 - B64U 80/30
Descripciones:
+ ES-2958408_A1 MÉTODO PARA LA REALIZACIÓN DE TAREAS EN UN OBJETO Y SISTEMA DE VEHÍCULOS NO TRIPULADOS SECTOR DE LA TÉCNICA La invención pertenece al sector de los vehículos no tripulados y se refiere a un método para la realización de tareas en un objeto (1) , que se pone en práctica mediante un sistema que comprende un vehículo base no tripulado de desplazamiento en superficie (2) y al menos un vehículo huésped no tripulado de tipo aéreo (3) , materialmente conectado al vehículo base (2) . ANTECEDENTES DE LA INVENCIÓN Los vehículos aéreos no tripulados (también denominados drones o UAV, del inglés Unmanned Aerial Vehicle) pueden ser de muy variadas configuraciones. El más común para usos no militares es el dron de tipo multirrotor, es decir, con varios brazos propulsores. Debido a su capacidad de vuelo estacionario, este es el tipo empleado en determinadas tareas, por ejemplo, de inspección, tal como la inspección de infraestructuras para la detección de defectos materiales. Incluso si las tareas se realizan en ámbitos espaciales reducidos, los drones presentan el problema de su limitada autonomía, debido a que la aeronave ha de efectuar complejas maniobras, mantenerse en vuelo estático, captar datos (por ejemplo, fotografías o vídeo) , o en ocasiones procesarlos a bordo, todo lo cual consume mucha energía. Se han descrito soluciones consistentes en que una aeronave no tripulada aloje a otras más pequeñas, sirviéndoles de plataforma de lanzamiento o prestándoles algún tipo de apoyo logístico, de modo que los vehículos auxiliares realizarán vuelos más cortos o requerirán de menos equipamiento a bordo, todo lo cual les proporciona un ahorro energético. Así por ejemplo en US2019112049A1 Sistema de lanzamiento portátil (TOP FLIGHT TECHNOLOGIES, INC.) , 18.04.2019, cuyo objeto es una primera aeronave que aloja a una segunda aeronave, ambas no tripuladas, siendo la segunda aeronave lanzada para realizar tareas de toma de datos meteorológicos una vez la primera aeronave ha alcanzado un determinado punto durante su vuelo. En los ejemplos conocidos en el estado de la técnica, el vehículo base es también una aeronave no tripulada, por lo que sigue planteándose el problema de la limitada autonomía operativa. Como solución a lo anterior, la presente patente propone un método de realización de tareas en un objeto (1) y un sistema de vehículos no tripulados (2, 3) configurado para la ejecución del método. El sistema de vehículos no tripulados (2, 3) comprende un vehículo base (2) , que se desplaza en superficie y que puede dotarse de una gran capacidad de baterías. El vehículo base (2) está conectado materialmente, mediante cableado (10) , a al menos un vehículo huésped (3) , que es un vehículo no tripulado de tipo aéreo (UAV, Unmanned Aerial Vehicle) (3) cuya alimentación proviene de la batería (7) del vehículo base (2) , lo cual permite aumentar extraordinariamente su autonomía operativa. La vinculación material por medio de cable (10) entre ambos hace que el al menos un vehículo huésped (3) pueda ser considerado un brazo operativo del vehículo base (2) , más que una aeronave con autonomía propia, de modo que la suma de ambos vehículos (2, 3) produce una sinergia que aumenta la autonomía de funcionamiento de la al menos una aeronave no tripulada (3) , su movilidad en áreas complejas, su capacidad de carga de sensores y actuadores y su capacidad de procesado de datos digitales. EXPLICACIÓN DE LA INVENCIÓN En un primer aspecto, la invención se refiere a un método para la realización de tareas en un objeto (1) , método que se pone en práctica mediante un conjunto de vehículos no tripulados (2, 3) que comprende un vehículo base de desplazamiento en superficie (2) y al menos un vehículo huésped de tipo aéreo (3) , comprendiendo el método las etapas definidas en la reivindicación 1. Otros modos de realización preferente se definen en las reivindicaciones dependientes. Debe entenderse por tarea cualquier actuación que realice el sistema de vehículos (2, 3) con respecto al objeto (1) sobre el que se implemente el método. Las tareas pueden estar relacionadas, por ejemplo, con la inspección del objeto (1) , entendiéndose por tal la verificación de su estado, por ejemplo, para la detección de defectos del material (tales como grietas en el fuselaje de un avión o en placas solares de un parque fotovoltaico) , o para controlar su estado (así, controlar el grado de crecimiento de un ultivo vertical o las existencias de un almacén) . Otro propósito de las tareas puede ser alterar el estado físico del objeto (1) , por ejemplo, tareas de reparación o de limpieza. En una primera etapa, el método comprende que el vehículo no tripulado base (2) se desplace por una ruta sustancialmente definida por el área que ocupa el objeto (1) sobre la superficie en que esté ubicado. Así, si se trata de una tarea de inspección que tiene por objeto un avión (1) , el vehículo base (2) se desplazará sustancialmente dentro del área que ocupa el avión (1) sobre el suelo en que esté estacionado, lo que puede incluir tanto seguir su contorno lateral como adentrarse en zonas que quedan debajo del fuselaje y alas. En el ejemplo de tareas de inspección para detectar defectos en placas solares en un parque fotovoltaico, o en tareas de limpieza o reparación de tales placas, el vehículo base (2) se desplazará por los pasillos del parque fotovoltaico, que delimitan el área en la que se ubican los paneles sobre el suelo, pudiendo asimismo adentrarse en zonas por debajo de dichos paneles. O si, en otro de los ejemplos mencionados, la tarea consiste en controlar existencias en un almacén, la ruta del vehículo base (2) se hará sustancialmente a lo largo de los pasillos del almacén. El vehículo base (2) puede tener su ruta programada con antelación, por lo que operaría en modo autónomo. La programación de esta ruta es convencional, máxime teniendo en cuenta que, por lo general, el recorrido terrestre del vehículo base (2) estará compuesto de distintas trayectorias predecibles. Cabe también que un operador conduzca el vehículo base (2) presencialmente mediante un dispositivo de control remoto. En ambos casos, debe entenderse que el desplazamiento del vehículo base (2) puede ser continuo, o puede incluir paradas a lo largo de su ruta, previamente programadas o a discreción del piloto humano. Una segunda etapa comprende que el al menos un vehículo huésped de tipo aéreo (3) , despegue desde el vehículo base (2) para la realización de una ruta aérea, efectuando durante el transcurso de la ruta al menos una tarea en relación con el objeto (1) , por ejemplo, cuando se trate de una inspección efectuará el menos una tarea de toma de datos. El al menos un vehículo aéreo (3) puede ser pilotado presencialmente, mediante un piloto humano que, provisto de un dispositivo de control remoto, se halla en el lugar y que puede ser el mismo que esté a cargo de dirigir presencialmente el vehículo base (2) . El pilotaje presencial tiene los inconvenientes de su mayor coste y del riesgo de colisión por error humano con el objeto inspeccionado, lo que puede ser muy dañino si se trata, por ejemplo, del fuselaje de un avión (1) . Para salvar los mencionados inconvenientes, en un modo de realización el al menos un vehículo aéreo (3) no es pilotado presencialmente, sino que opera en modo autónomo. En un modo de realización de esta operación en modo autónomo, al vehículo aéreo (3) se le irán transmitiendo las órdenes para su adecuado posicionamiento espacial, según técnicas conocidas. Esta transmisión se efectuará desde el vehículo base (2) o desde un sistema de computación externo al vehículo base (2) . En otro modo de realización, el vuelo en modo autónomo se efectúa conforme a una ruta programada con antelación, lo que es conocido en la técnica. En un ejemplo, la ruta programada para el al menos un vehículo huésped (3) queda alojada en un sistema de computación a bordo del vehículo base (2) , desde donde se transmite la ruta al al menos un vehículo huésped (3) . En un modo de realización alternativo, la ruta programada para el al menos un vehículo huésped (3) queda alojada en un sistema de computación externo al vehículo base (2) , normalmente bajo control de la entidad a cargo de las tareas. En este supuesto, el método comprende la etapa de transmitir dicha ruta al vehículo base (2) , para que este a su vez pueda transmitirla al al menos un vehículo huésped (3) . La operativa de drones (3) en vuelo autónomo conforme a una ruta preprogramada plantea problemas, derivados de que, como en la ruta se pueden presentar obstáculos de todo tipo, la aeronave (3) normalmente deberá estar equipada con componentes electrónicos que le doten de capacidades del tipo detectar-evitar obstáculos autónomamente y detectar-actuar, esto es, detectar los puntos o elementos en los que se requiera llevar a cabo una actuación (por ejemplo, captación de imágenes) . Estos componentes, por un lado, incrementan el consumo de energía del dron (3) , lo que, en la presente invención, queda paliado por la conexión de alimentación eléctrica (9, 10) entre el vehículo base (2) y el vehículo aéreo (3) y por otro, aumentan el peso y tamaño del dron (3) , lo que dificulta su maniobrabilidad. Para solventar el problema planteado, en un modo de realización el método se implementa en un objeto de posición y forma conocidas. Por "objeto de posición y forma onocidas" debe entenderse un objeto cuya ubicación y diseño espacial son únicos. Puede tratarse de un objeto de ubicación fija e inamovible, por ejemplo, una infraestructura, como un gasoducto o un parque fotovoltaico concretos, que no pueden variar de ubicación. Puede asimismo tratarse de un objeto móvil, como un determinado modelo de avión (1) , pues al ser producidos en serie, todos los modelos serán idénticos, por lo que la forma del objeto será conocida. Para conseguir que la posición de estos objetos también sea conocida, cuando el método se implemente sobre ellos, una etapa del método consistirá en ubicarlo en una localización predeterminada en el lugar en que vayan a realizarse las tareas. En este mismo supuesto de objeto (1) de forma conocida pero de posición móvil, alternativamente se puede lograr que su posición sea conocida estableciendo en el objeto (1) uno o más puntos de localización con respecto a los cuales se ubique espacialmente el al menos un vehículo huésped. Igualmente, se considerará que son objetos de posición y forma conocidas determinadas estructuras ubicadas en el interior de lugares de producción, por ejemplo, las paredes dedicadas a cultivos verticales dentro de una determinada explotación agraria. También se considerará un objeto de posición y forma conocidas el volumen predeterminado que, dentro de un almacén, es susceptible de ser ocupado por las cajas donde se almacenan existencias de materia prima o de productos fabricados. Esto es así porque, si bien el número de cajas puede variar, el volumen que puedan ocupar todas ellas es conocido de antemano. En este modo de realización, la invención propone diseñar la ruta tomando en consideración la mencionada circunstancia de que la ruta se realizará respecto a un objeto de posición y forma conocidas. En un modo de diseñar una ruta, en primer lugar, se obtiene un modelo tridimensional del objeto a inspeccionar, para lo cual una posibilidad conocida en la técnica es escanear un objeto de referencia (por ejemplo, un avión del mismo modelo, o la estructura específica de que se trate) con dispositivos como un sensor LIDAR, sensores o cámaras fotogramétricas. De la operación de escaneo resulta una nube de puntos a partir de la cual se genera el modelo en tres dimensiones del objeto. Dicho modelo tridimensional es el que se tomará como base para configurar la ruta, mediante pasos consistentes en detectar el objeto a partir de la nube de puntos, calcular unos puntos de parada del vehículo huésped (3) en puntos de la nube de puntos asociados a elementos del objeto, convertir los puntos de parada en una secuencia de puntos espaciales de posicionamiento o waypoints y programar tareas (por ejemplo, de captación de datos) asociadas a todos o algunos de los waypoints, onfigurando así una ruta programable. Convenientemente, la ruta podrá emplearse cuantas veces sea necesario inspeccionar el mismo objeto (por ejemplo, para sucesivos mantenimientos de la misma infraestructura, o del mismo modelo de avión que haya servido de base para el diseño de la ruta) . El documento de patente WO2022/023594 "Sistema y procedimiento de inspección de infraestructuras" (ARBOREA INTELLBIRD, S.L.) , 03/02/2022, describe cómo obtener una ruta de navegación para una aeronave no tripulada operando en modo autónomo tomando como referencia una infraestructura, lo cual es aplicable a la presente patente, en tanto una infraestructura es un objeto de posición y forma conocidas. En un modo de realización, el método comprende la etapa adicional de recibir el vehículo base (2) los datos adquiridos por el al menos un vehículo huésped (3) durante la realización de su ruta aérea. En un modo de realización, el método comprende la etapa adicional de procesar el vehículo base (2) los datos adquiridos por el al menos un vehículo huésped (3) . La concentración de las capacidades de procesamiento en el vehículo base (2) permite liberar al dron (3) de los complejos dispositivos electrónicos que se requerirían si hubiera de estar dotado de capacidad de procesamiento a bordo. En un modo de realización, el método comprende la etapa adicional de que el vehículo base (2) transmita a un sistema de computación externo los datos resultantes del procesamiento de los datos que ha recibido del al menos un vehículo huésped (3) . En un segundo aspecto, la invención tiene por objeto un sistema de vehículos no tripulados (2, 3) que comprende un vehículo base de desplazamiento en superficie (2) y al menos un vehículo huésped de tipo aéreo (3) . Son vehículos no tripulados los que no llevan un piloto humano a bordo. Estos vehículos pueden ser pilotados por un piloto humano presencialmente, el cual tiene al vehículo en su campo visual (pilotaje VLOS, del inglés Visual Line of Sight) , sin perjuicio de que sea ayudado por sensores a bordo del vehículo que le permitan mantener una consciencia situacional de la aeronave en los momentos en que esta pueda quedar fuera de su campo de visión. Los vehículos no tripulados asimismo pueden pilotarse por un piloto humano situado remotamente respecto al vehículo, operación que se efectúa a través e las imágenes y datos de posicionamiento que transmite el vehículo; o pueden operar autónomamente. Por vehículo base de desplazamiento en superficie (2) debe entenderse tanto un vehículo no tripulado terrestre (2) (conocidos como UGV, del inglés Unmanned Ground Vehicle o vehículo terrestre no tripulado) , como un vehículo acuático de superficie (USV, del inglés Unmanned Surface Vehicle o vehículo no tripulado de superficie acuática, por oposición al denominado UUV, Unmanned Underwater Vehicle o vehículo no tripulado subacuático, no incluido en esta patente) . Ambos tipos de vehículos son aptos para integrarse en el sistema de vehículos no tripulados (2, 3) de la patente, en tanto se puede habilitar en ellos una plataforma superior (4) que pueda servir de base al al menos un vehículo no tripulado aéreo (3) . El vehículo base (2) y el al menos un vehículo aéreo (3) mantienen una relación de dependencia que, en un modo de realización, se concreta en una conexión material mediante medios para la transmisión de energía eléctrica (9, 10) . De este modo, el al menos un vehículo huésped (3) recibe su alimentación desde el vehículo base (2) , por lo que no necesita una instalación de batería, lo cual permite simplificar su construcción y disminuir su tamaño. Este sistema de vehículos está configurado para ejecutar las etapas del método de la reivindicación 1. En otro modo de realización, la conexión entre ambos tipos de vehículos (2, 3) incluye además medios para la transmisión de datos (8, 10) , con lo cual el al menos un vehículo huésped recibe (3) y transmite datos a través de la conexión directa (10) con el vehículo base (2) , por lo que los vehículos (2, 3) no necesitan operar en entornos en que haya conexión Wifi y ni siquiera necesitan estar conectados mediante radio. Este sistema de vehículos (2, 3) está configurado para ejecutar las etapas del método de las reivindicaciones 1 a 10. En un modo de realización, el sistema de vehículos no tripulados (2, 3) dotado de doble conexión de alimentación y datos (10) comprende un sistema de computación externo al vehículo base (2) , configurado para comunicarse con el vehículo base (2) . Dicho sistema de computación puede ser un dispositivo portátil de telecomunicación, esto es, un teléfono móvil inteligente (smartphone) , tableta, ordenador portátil o ualquier otro tipo de dispositivo portátil que permita la comunicación telemática, incluida vía Wifi o por redes inalámbricas de área personal (WPAN) con arreglo al estándar Bluetooth® u otros sistemas de comunicación radio. Asimismo, el sistema de computación externo al vehículo base puede ser un servidor remoto con capacidad de comunicación telemática. Este sistema puede estar configurado para comunicarse directamente con el vehículo base (2) , con el dispositivo portátil de telecomunicación o con ambos. Finalmente, la presente invención se refiere a un conjunto de software que contiene un sistema operativo y un programa de ordenador que comprende instrucciones para que el sistema de vehículos (2, 3) ejecute el método reivindicado. Otro objeto de la invención es un medio legible por ordenador que tiene almacenado dicho programa de ordenador. La invención aquí descrita permite un desdoblamiento de tareas complementarias entre el vehículo base de desplazamiento en superficie (2) y el al menos un vehículo huésped de tipo aéreo (3) , que refuerza la eficiencia del conjunto cuando, como aquí se propone, se emplea para la realización de tareas en objetos (1) : los recorridos del vehículo base (2) consumen relativamente poca energía, al ser realizados en superficie, sea terrestre o acuática, en vez de por el aire. No habiendo limitaciones significativas de tamaño, puede escogerse un vehículo base (2) dotado del número o potencia de baterías (7) que le confieran una autonomía operativa, y consiguiente capacidad de alimentación del al menos un vehículo huésped (3) , tan grande como se desee. Por otra parte, al tomar su alimentación, y, en un modo de realización, poder recibir los datos directamente del vehículo base (2) , el al menos un vehículo huésped (3) no necesitará baterías ni sensores complejos de posicionamiento y su unidad de control será más pequeña y sencilla que la de un vehículo que hubiera de ser empleado en tales tareas sin el auxilio de un vehículo base. Esto permite utilizar vehículos huéspedes (3) de pequeño tamaño, con mayor capacidad de maniobra y menor riesgo de daños en el objeto de inspección en caso de contacto accidental. Además, se podrá dotar al vehículo aéreo (3) de un amplio rango de sensores para la realización de las tareas encomendadas, sin menoscabar por ello su autonomía operacional, porque la alimentación extra que ello suponga la tomará del vehículo base (2) . La vinculación material entre ambos tipos de vehículos (2, 3) y su capacidad para operar en movimiento simultáneo limitan el radio de acción de los drones (3) a la longitud del cable que los una al vehículo base (2) , que debido a la combinación de movimientos simultáneos de ambos vehículos (2, 3) , puede er de extensión muy contenida con lo cual no se plantean problemas de riesgo para el tráfico aéreo. BREVE DESCRIPCIÓN DE LOS DIBUJOS Para complementar la descripción se acompaña un juego de dibujos, que con carácter ilustrativo y no limitativo representan lo siguiente: Figura 1.- Vista superior de un sistema compuesto por un vehículo base de desplazamiento en superficie terrestre y dos vehículos huéspedes de tipo aéreo efectuando tareas relacionadas con la inspección de un avión. Figura 2.- Mismos sistema y objeto de la figura anterior, en una vista lateral. Figura 3.- Corte en sección longitudinal de un sistema compuesto por un vehículo no tripulado base de desplazamiento en superficie terrestre, con dos vehículos huéspedes de tipo aéreo representados en vuelo. Figura 4.- Vehículo base de desplazamiento en superficie terrestre con dos vehículos huéspedes de tipo aéreo acoplados en sus correspondientes cavidades. REALIZACIÓN PREFERENTE DE LA INVENCIÓN En un primer aspecto, la presente invención tiene por objeto un método para la realización de tareas en un objeto (1) , que se implementa mediante un sistema de vehículos no tripulados (2, 3) que comprende un vehículo base de desplazamiento en superficie (2) y al menos un vehículo huésped de tipo aéreo (3) . El método puede realizarse sobre objetos del tipo de los que ejemplificativamente se han descrito en el apartado precedente, entre ellos, las aeronaves tripuladas convencionales, sean de pasajeros, de carga o militares. Estas aeronaves están sujetas a exhaustivos programas de mantenimiento, los cuales incluyen inspecciones visuales de su fuselaje y alas llevadas a cabo por inspectores certificados, aparte de las inspecciones adicionales que los mecánicos de la operadora de la aeronave puedan realizar. Estas tareas son muy onerosas para las compañías, por el coste del personal specializado y por el tiempo en que las aeronaves han de permanecer inoperativas. A este tipo de tareas se le puede aplicar ventajosamente la presente invención. Así, en un modo de realización preferente, que se ilustra esquemáticamente en las Figuras 1 y 2, las tareas que forman parte del método son tareas de inspección y el objeto en el que se realizan es un avión (1) de línea comercial de un determinado fabricante y modelo. Dado que todos los ejemplares del mismo modelo serán idénticos, se trata de un objeto (1) de forma conocida, en el sentido dado a esta expresión en la presente patente. No obstante, al ser un objeto (1) móvil, su ubicación espacial no será siempre la misma. Para que el ejemplar de avión (1) específico sobre el que se va a implementar el método sea un objeto (1) de posición conocida, el avión (1) se ubicará en una posición preestablecida en el lugar donde se realice la inspección, a cuyo fin se habrán practicado unas marcas en el suelo que señalen la posición que deban ocupar sus ruedas delanteras y traseras. Todas las inspecciones que se realicen sobre ese mismo avión (1) o sobre otras unidades del mismo modelo, requerirán que el avión (1) quede estacionado en la misma posición en el mismo lugar de inspección. Alternativamente, cuando las operaciones no se vayan a realizar en dicho punto de estacionamiento fijo, se marcarán en el avión (1) dos puntos, en el morro y en el extremo de un ala, configurados para que los drones puedan ubicarse espacialmente respecto a ellos. Esta operación de marcado se realiza por medios conocidos, como un sensor (por ejemplo, láser LIDAR de medición puntual) , o bien practicando en los mencionados puntos, a los solos fines de la inspección, sendas marcas visuales detectables mediante visión computerizada (por ejemplo, adhesivos removibles que contengan un código QR) . En un momento anterior en el tiempo, sobre la misma u otra unidad del mismo modelo de avión (1) se habrán llevado a cabo las operaciones necesarias para diseñar una ruta adaptada a la forma específica de ese modelo de avión (1) , operaciones que han sido explicadas precedentemente en este documento. Por ello, la ruta que los vehículos aéreos huéspedes (3) van a realizar ya está programada con antelación a la ejecución de las tareas. En un modo de realización, el método de inspección se realiza mediante un sistema de vehículos no tripulados (2, 3) que comprende un vehículo base de desplazamiento en superficie, en concreto, un vehículo no tripulado terrestre (UGV) (2) . De este vehículo base (2) dependen dos vehículos huéspedes de tipo aéreo (3) . Este conjunto de ehículos huéspedes de tipo aéreo (3) operaría de manera coordinada, lo que en el estado de la técnica se conoce como vuelo en enjambre. El emplear varios vehículos aéreos (3) permite repartir entre ellos las tareas, dotándoles de distintos tipos de sensores. En función del volumen del objeto (1) en el que se realicen las tareas o por necesidades logísticas, con respecto al mismo objeto (1) se podrán emplear dos o más sistemas de vehículos no tripulados (2, 3) . A los efectos de esta patente, por "sistema de vehículos no tripulados" (2, 3) debe entenderse un vehículo base de desplazamiento en superficie (2) al que esté conectado al menos un vehículo huésped de tipo aéreo (2) . El empleo de vehículos base (2) adicionales, con cualquier número de vehículos huéspedes (3) conectados a ellos, no significará que ha variado la configuración del sistema de vehículos (2, 3) , sino que se están empleando varios sistemas (2, 3) simultáneamente. En el modo de realización que aquí se ejemplifica, el vehículo base (2) opera en modo autónomo conforme a una ruta que se le ha introducido en su unidad de control con anterioridad y que ha sido diseñada en el modo ejemplificativamente descrito. En otro modo de realización, el vehículo base (2) puede ser dirigido presencialmente mediante un control remoto o por cable. La ruta a realizar por los vehículos de tipo aéreo (3) puede estar alojada en la unidad de control del vehículo base (2) . Así, llegado el momento en que deban dar comienzo las operaciones de inspección, dicha ruta será transmitida a los vehículos huéspedes (3) por el vehículo base (2) . En otro ejemplo de realización, la ruta de inspección puede está alojada en un sistema de computación externo al vehículo base (2) , bajo control de la entidad responsable del mantenimiento del avión (1) , en cuyo caso, llegado el momento de comienzo de las operaciones, la ruta será transmitida al vehículo base (2) desde el sistema de computación, vía Wifi o radio. Una vez que el avión (1) está ubicado en el lugar donde va a llevarse a cabo la inspección, el operador de la entidad de mantenimiento determinará el momento en que debe comenzar la ejecución del método. Una vez da comienzo, se producirán dos tipos de desplazamiento del sistema de vehículos no tripulados (2, 3) : por un lado, el vehículo base (2) se desplazará por una ruta en superficie, en este caso terrestre, sustancialmente dentro del área que ocupa el avión (1) sobre el suelo en que esté estacionado, lo que puede incluir tanto seguir su contorno lateral como adentrarse en onas que quedan debajo del fuselaje y alas. Y los vehículos huéspedes aéreos (3) despegarán desde el vehículo base (2) para la realización de su correspondiente ruta aérea en el entorno del avión (1) . Ambos tipos de desplazamientos pueden ser simultáneos, de modo que, al tiempo que el vehículo base (2) se desplaza, los vehículos huéspedes (3) despegan y efectúan su ruta. O pueden realizarse en momentos sucesivos, de modo que, mientras el vehículo base (2) se desplaza hasta un punto intermedio de su ruta, los vehículos huéspedes (3) se mantienen estáticos en el vehículo base (2) , del que despegan cuando el vehículo base (2) se para en los puntos intermedios. Los datos que los vehículos huéspedes (3) van adquiriendo a medida que realizan su ruta son recibidos en el vehículo base (2) . En un ejemplo de realización, esta transmisión-recepción es en tiempo real. En otros modos de realización, se puede realizar por volcado de datos una vez los vehículos huéspedes (3) hayan retornado al vehículo base (2) . En un modo de realización, el vehículo base (2) realiza a bordo tareas de procesamiento de los datos recibidos de los vehículos huéspedes (3) . El grado de procesamiento del material recibido será mayor o menor en función de las preferencias del responsable del servicio. Así, el vehículo base (2) puede emitir un informe completo o realizar un preprocesado de la información. En un modo de realización, el resultado de las tareas de procesamiento y análisis se recoge en un archivo codificado estableciendo alertas y posiciones de las anomalías detectadas. Concluido el procesamiento asignado al vehículo base (2) , el archivo codificado se transmite al sistema de computación externo. De este modo, se evita tener que enviar a dicho sistema de computación todos los datos adquiridos por los vehículos huéspedes (3) , lo que supondría un ingente volumen de información. El método descrito puede implementarse para la realización de cualesquiera tareas que se realicen respecto de un objeto. Así, el método es susceptible de aplicación en tareas de inspección y mantenimiento de bandejas de cultivo en cultivos verticales, por lo cual se trataría de un ejemplo de realización de tareas en relación con un objeto de posición y forma conocidas. En un modo de implementación del método para este tipo de tarea, el vehículo base de desplazamiento en superficie es un UGV, que se desplaza por una ruta preprogramada por los pasillos entre las estructuras de soporte de las bandejas. Dos aeronaves no tripuladas despegan del UGV para la realización de rutas preprogramadas, incluyendo sus tareas el desplazamiento por el contorno de las sucesivas bandejas verticales para, con la ayuda de sensores específicos como cámaras multiespectrales, verificar el estado tanto de los cultivos como de los elementos estructurales. Los datos recabados son transmitidos a través del cable al vehículo base, que los procesa y transmite a un sistema de computación externo localizado en la planta de producción. En otro ejemplo, el método se implementa en relación con tareas de control de existencias en un almacén logístico. El control a cargo de personas es costoso y limita las posibilidades de almacenamiento en altura de las cajas que contienen las existencias. Mediante el método reivindicado, el vehículo base de desplazamiento en superficie sería igualmente un UGV, que se desplaza por una ruta preprogramada por los pasillos a lo largo de los cuales se alinean las estructuras de apilamiento de las cajas. Dos drones despegan del UGV para la realización de sendas rutas preprogramadas, incluyendo sus tareas el desplazamiento por el contorno de las estructuras para, con la ayuda de sensores específicos, como lectores de códigos de barras o QR, leer los códigos de las cajas. La realización de la tarea mediante el sistema propuesto permite solventar limitaciones de altura de las cajas, sin más que disponer cables de alimentación de los drones con la longitud necesaria. Los datos recabados son transmitidos a través del cable al vehículo base, que los procesa, generando listados de inventario que transmite a un sistema de computación localizado en las oficinas del almacén logístico. De modo sustancialmente idéntico, el método puede implementarse para la realización de tareas de inspección en plantas solares térmicas y fotovoltaicas. En este modo de realización, el vehículo base de desplazamiento en superficie sería igualmente un UGV, que se desplaza por una ruta preprogramada por los pasillos definidos por las hileras de paneles. Dos drones despegan del vehículo base con la tarea de desplazarse respectivamente por la parte inferior y superior de los paneles, barriéndolas con sensores termográfico-radiométricos y con un sensor visible. Los datos adquiridos y sus metadatos de posición asociados son transmitidos al vehículo base donde son procesados en tiempo real mediante software para detectar anomalías y crear alertas que son remitidas a un sistema de computación localizado en la estación de control de la planta solar. Un tercer dron dependiente del mismo vehículo base realiza tareas de impieza de la cara superior de los paneles, a cuyo efecto está provisto de cepillos giratorios. En un segundo aspecto, la presente invención tiene por objeto un sistema de vehículos no tripulados (2, 3) que comprende un vehículo base de desplazamiento en superficie (2) y al menos un vehículo huésped de tipo aéreo (3) . Para ejemplificar un modo de realización del sistema de vehículos, la Fig. 3 representa, en un corte de sección longitudinal, un vehículo base de tipo terrestre (2) conectado a dos aeronaves no tripuladas (3) . Como vehículo de tipo terrestre (2) puede usarse un UGV convencional, movido por al menos un motor eléctrico o térmico que transmite su energía a unas ruedas. La configuración del vehículo (2) para adaptarlo convenientemente a la realización del tipo de tareas de que se trate puede ser realizada por el experto en la materia. En un modo de realización del UGV (2) , en su parte superior se dispone una plataforma (4) , que sirve de base de despegue y aterrizaje a las aeronaves huéspedes (3) . La plataforma (4) presenta dos cavidades (5) configuradas para albergar sendos vehículos huéspedes de tipo aéreo (3) . El UGV (2) está dotado de una unidad de control (6) con un dispositivo de procesamiento informático, que comprende un microcontrolador estándar, el cual gestiona el funcionamiento del motor del vehículo. En un modo de realización, la unidad de control del vehículo base comprende un sistema de procesado y computación en tiempo real que le permita analizar las imágenes y datos transmitidos por las aeronaves huéspedes (3) , mediante recursos de inteligencia artificial, por ejemplo, de visión computarizada y análisis de nubes de puntos LIDAR y fotogramétricas. El vehículo base (2) está equipado con una o más baterías (7) , cuya capacidad se seleccionará en función de criterios como el nivel de procesamiento que la unidad de control vaya a realizar o la previsible duración de las tareas a las que se vaya a dedicar habitualmente el vehículo base (2) . En un modo preferido de realización, el vehículo base de tipo terrestre (2) está materialmente conectado a los dos vehículos aéreos (3) por medios tanto para la transmisión de energía eléctrica (9, 10) como para la transmisión de datos (8, 10) . A tal in, de la unidad de control (6) emergen dos cables de fibra óptica (8) y de la batería (7) , dos cables eléctricos (9) . Cada par de cables (8, 9) confluye y se une en un único cable (10) que incluye conductos separados y aislados para la corriente eléctrica y para la fibra óptica. Cada uno de estos dos cables dobles (10) se conecta con una aeronave (3) , a través de sendos orificios practicados en la base de las cavidades (5) . La longitud del cable de conexión (10) entre el vehículo base (2) y cada vehículo aéreo (3) se escogerá en función de factores como la altura del objeto (1) en el que se realicen las tareas o la extensión del área que los drones (3) hayan de cubrir. Para el manejo de los cables (10) , se disponen en la plataforma sendos dispositivos de enrollado (11) , conocidos en el estado de la técnica, que permiten el despliegue y recogida de los cables (10) a medida que las aeronaves (3) se alejen o acerquen al vehículo base (2) . La Fig. 4 muestra el mismo sistema de vehículos (2, 3) que se ha descrito, en una vista de tres cuartos que muestra a los dos vehículos huéspedes de tipo aéreo (3) acoplados en sus correspondientes cavidades (5) de la plataforma superior (4) del vehículo base (2) , con los dispositivos de enrollado de cable (11) sobre dicha plataforma (4) . En el modo de realización que se propone, los vehículos huéspedes de tipo aéreo (3) son drones del tipo multirrotor, esto es, de los que comprenden varios rotores asociados a sendos motores de propulsión. Este tipo de configuración permite aterrizajes y despegues verticales y el vuelo estacionario, por lo que este tipo es el más apto para la realización de las tareas propias del método reivindicado. Estas aeronaves (3) estarán equipadas con unos u otros dispositivos de navegación y adquisición de datos según sea la índole de la tarea asignada, siendo esta una operación conocida por el experto en la materia. Ejemplificativamente, en cuando a dispositivos de navegación las aeronaves (3) están equipadas con un sistema de posicionamiento por satélite capaz de conectarse a varias redes satélites, como GPS, GLONASS, BeiDou o GALILEO. Asimismo, estarían dotadas de un sensor básico de detección y evitación de obstáculos. Adicionalmente, el UAV está dotado de un sistema de posicionamiento de alta precisión, por ejemplo, un sistema del tipo RTK (Real-Time Kinematics) . Cuando las tareas se ejecuten en un recinto, los sistemas de posicionamiento de las aeronaves no tripuladas se pueden conjugar con unas balizas de posicionamiento que se ubicarán en el recinto. Para los fines de adquisición de datos, las aeronaves (3) están dotadas de dispositivos periféricos, que en el ejemplo de realización que se está describiendo pueden omprender una cámara visible de alta resolución, una cámara termográfica (cuando se trate de inspecciones sobre fuselajes de composite) , un sensor láser para detectar abolladuras, cámaras fotográficas o de vídeo, cámaras de espectro térmico por infrarrojos o sensores LIDAR de barrido, láser para el contrastado visible de irregularidades, y un sensor tipo palpador como los que lleva a bordo la aeronave del documento patente EP3392652 A1 (ARBOREA INTELLBIRD SL) , 24/10/2018 Método para inspeccionar materiales y aeronave para implementar dicho método, [0023], o de tipo ultrasónico. En un modo de realización, el sistema de vehículos (2, 3) comprende un sistema de computación externo al vehículo base (2) . Este sistema de computación puede ser un dispositivo portátil de telecomunicación, sea un teléfono móvil inteligente (smartphone) , tableta, ordenador portátil. En otro modo de realización, puede ser un servidor remoto, que según un ejemplo de realización, comprende los siguientes componentes: al menos un circuito que integra procesadores multinúcleo, una placa base, unidades de memoria RAM, medios de almacenamiento, una tarjeta gráfica configurada para procesar gran volumen de información en forma de imágenes; fuente de alimentación, medios de refrigeración y tarjeta de red y de comunicaciones, por ejemplo un sistema basado en comunicación tipo router con tarjeta SIM. En experto en la materia, en función de las necesidades previsibles, podrá configurar dicho servidor remoto con equipamientos de más o menos capacidad de entre los disponibles en el estado de la técnica. En otro modo de realización, el sistema de computación combina los mencionados dispositivo portátil de comunicación y servidor remoto. El sistema de computación externo al vehículo base (2) está configurado para comunicarse con el vehículo base (2) . Esta comunicación bidireccional puede efectuarse mediante Wifi, por redes inalámbricas de área personal (WPAN) con arreglo al estándar Bluetooth® o en tiempo real mediante un protocolo de comunicación de baja latencia, por ejemplo, un protocolo de comunicación 5G.
Publicaciones:
ES2958408 (08/02/2024) - A1 Solicitud de patente con informe sobre el estado de la técnica
Eventos:
En fecha 05/07/2022 se realizó Registro Instancia de Solicitud
En fecha 05/07/2022 se realizó Admisión a Trámite
En fecha 05/07/2022 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 21/07/2022 se realizó Superado examen de oficio
En fecha 03/10/2022 se realizó Realizado IET
En fecha 05/10/2022 se realizó 1109P_Comunicación Traslado del IET
En fecha 08/02/2024 se realizó Publicación Solicitud
En fecha 08/02/2024 se realizó Publicación Folleto Solicitud con IET (A1)
Pagos:
05/07/2022 - Pago Tasas IET
Fuente de la información
Parte de la información aquí publicada es pública puesto que ha sido obtenida de la Oficina de Propiedad Industrial de los diferentes países el 27/04/2024 y por lo tanto puede ser que la información no esté actualizada.Parte de la información aquí mostrada ha sido calculada por nuestro sistema informático y puede no ser veraz.
Privacidad
Si considera que al información aquí publicada afecta a su privacidad y desea que eliminemos la información aquí publicada envíe un email a info@patentes-y-marcas.com o rellene el formulario que encontrará aquí.Información sobre el registro de patente nacional por MÉTODO PARA LA REALIZACIÓN DE TAREAS EN UN OBJETO Y SISTEMA DE VEHÍCULOS NO TRIPULADOS con el número P202230607
El registro de patente nacional por MÉTODO PARA LA REALIZACIÓN DE TAREAS EN UN OBJETO Y SISTEMA DE VEHÍCULOS NO TRIPULADOS con el número P202230607 fue solicitada el 05/07/2022. Se trata de un registro en España por lo que este registro no ofrece protección en el resto de países. El registro MÉTODO PARA LA REALIZACIÓN DE TAREAS EN UN OBJETO Y SISTEMA DE VEHÍCULOS NO TRIPULADOS con el número P202230607 fue solicitada por ARBOREA INTELLBIRD S.L.. El registro [modality] por MÉTODO PARA LA REALIZACIÓN DE TAREAS EN UN OBJETO Y SISTEMA DE VEHÍCULOS NO TRIPULADOS con el número P202230607 está clasificado como ,G05D 1/00,G05D 1/10,B64F 5/60,G08G 1/0968,G08G 5/00,G08G 7/00,B60W 60/00,G06V 10/40,G06V 10/74,G06T 19/00,G05D 1/628,G05D 1/646,G05D 1/648,G05D 1/661,G05D 1/678,G05D 1/689,G05D 1/692,B64U 10/60,B64U 50/34,B64U 80/25,B64U 80/30 según la clasificación internacional de patentes.
Otras invenciones solicitadas por ARBOREA INTELLBIRD S.L.
Es posible conocer todas las invenciones solicitadas por ARBOREA INTELLBIRD S.L. entre las que se encuentra el registro de patente nacional por MÉTODO PARA LA REALIZACIÓN DE TAREAS EN UN OBJETO Y SISTEMA DE VEHÍCULOS NO TRIPULADOS con el número P202230607. Si se desean conocer más invenciones solicitadas por ARBOREA INTELLBIRD S.L. clicar aquí.Otras invenciones solicitadas en la clasificación internacional de patentes ,G05D 1/00,G05D 1/10,B64F 5/60,G08G 1/0968,G08G 5/00,G08G 7/00,B60W 60/00,G06V 10/40,G06V 10/74,G06T 19/00,G05D 1/628,G05D 1/646,G05D 1/648,G05D 1/661,G05D 1/678,G05D 1/689,G05D 1/692,B64U 10/60,B64U 50/34,B64U 80/25,B64U 80/30.
Es posible conocer invenciones similares al campo de la técnica se refiere. El registro de patente nacional por MÉTODO PARA LA REALIZACIÓN DE TAREAS EN UN OBJETO Y SISTEMA DE VEHÍCULOS NO TRIPULADOS con el número P202230607 está clasificado con la clasificación ,G05D 1/00,G05D 1/10,B64F 5/60,G08G 1/0968,G08G 5/00,G08G 7/00,B60W 60/00,G06V 10/40,G06V 10/74,G06T 19/00,G05D 1/628,G05D 1/646,G05D 1/648,G05D 1/661,G05D 1/678,G05D 1/689,G05D 1/692,B64U 10/60,B64U 50/34,B64U 80/25,B64U 80/30 por lo que si se desea conocer más registros con la clasificación ,G05D 1/00,G05D 1/10,B64F 5/60,G08G 1/0968,G08G 5/00,G08G 7/00,B60W 60/00,G06V 10/40,G06V 10/74,G06T 19/00,G05D 1/628,G05D 1/646,G05D 1/648,G05D 1/661,G05D 1/678,G05D 1/689,G05D 1/692,B64U 10/60,B64U 50/34,B64U 80/25,B64U 80/30 clicar aquí.Patentes en España
Es posible conocer todas las invenciones publicadas en España entre las que se encuentra el registro patente nacional por MÉTODO PARA LA REALIZACIÓN DE TAREAS EN UN OBJETO Y SISTEMA DE VEHÍCULOS NO TRIPULADOS. Nuestro portal www.patentes-y-marcas.com ofrece acceso a las publicaciones de patentes en España. Conocer las patentes registradas en un país es importante para saber las posibilidades de fabricar, vender o explotar una invención en España.Patentes registradas en la clase G
Es posible conocer todas las patentes registradas en la clase G (FISICA) entre las que se encuentra la patente MÉTODO PARA LA REALIZACIÓN DE TAREAS EN UN OBJETO Y SISTEMA DE VEHÍCULOS NO TRIPULADOS con el número P202230607. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase G05
Es posible conocer todas las patentes registradas en la clase G05 (CONTROL; REGULACION) entre las que se encuentra la patente MÉTODO PARA LA REALIZACIÓN DE TAREAS EN UN OBJETO Y SISTEMA DE VEHÍCULOS NO TRIPULADOS con el número P202230607. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase G05D
Es posible conocer todas las patentes registradas en la clase G05D (SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS) entre las que se encuentra la patente MÉTODO PARA LA REALIZACIÓN DE TAREAS EN UN OBJETO Y SISTEMA DE VEHÍCULOS NO TRIPULADOS con el número P202230607. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase B
Es posible conocer todas las patentes registradas en la clase B (TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTE ) entre las que se encuentra la patente MÉTODO PARA LA REALIZACIÓN DE TAREAS EN UN OBJETO Y SISTEMA DE VEHÍCULOS NO TRIPULADOS con el número P202230607. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase B64
Es posible conocer todas las patentes registradas en la clase B64 (AERONAVES; AVIACION; ASTRONAUTICA) entre las que se encuentra la patente MÉTODO PARA LA REALIZACIÓN DE TAREAS EN UN OBJETO Y SISTEMA DE VEHÍCULOS NO TRIPULADOS con el número P202230607. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase B64F
Es posible conocer todas las patentes registradas en la clase B64F (INSTALACIONES EN TIERRA O INSTALACIONES EN CUBIERTA DE PORTAAVIONES ESPECIALMENTE ADAPTADAS PARA SU ) entre las que se encuentra la patente MÉTODO PARA LA REALIZACIÓN DE TAREAS EN UN OBJETO Y SISTEMA DE VEHÍCULOS NO TRIPULADOS con el número P202230607. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase G08
Es posible conocer todas las patentes registradas en la clase G08 (SEÑALIZACION) entre las que se encuentra la patente MÉTODO PARA LA REALIZACIÓN DE TAREAS EN UN OBJETO Y SISTEMA DE VEHÍCULOS NO TRIPULADOS con el número P202230607. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase G08G
Es posible conocer todas las patentes registradas en la clase G08G (SISTEMAS DE CONTROL DE TRÁFICO) entre las que se encuentra la patente MÉTODO PARA LA REALIZACIÓN DE TAREAS EN UN OBJETO Y SISTEMA DE VEHÍCULOS NO TRIPULADOS con el número P202230607. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase B60
Es posible conocer todas las patentes registradas en la clase B60 (VEHICULOS EN GENERAL) entre las que se encuentra la patente MÉTODO PARA LA REALIZACIÓN DE TAREAS EN UN OBJETO Y SISTEMA DE VEHÍCULOS NO TRIPULADOS con el número P202230607. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase B60W
Es posible conocer todas las patentes registradas en la clase B60W (CONTROL CONJUGADO DE VARIAS SUBUNIDADES DE UN VEHICULO DE DIFERENTE TIPO O FUNCION; SISTEMAS DE CONT) entre las que se encuentra la patente MÉTODO PARA LA REALIZACIÓN DE TAREAS EN UN OBJETO Y SISTEMA DE VEHÍCULOS NO TRIPULADOS con el número P202230607. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase G06
Es posible conocer todas las patentes registradas en la clase G06 (COMPUTO; CALCULO; CONTEO) entre las que se encuentra la patente MÉTODO PARA LA REALIZACIÓN DE TAREAS EN UN OBJETO Y SISTEMA DE VEHÍCULOS NO TRIPULADOS con el número P202230607. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase G06V
Es posible conocer todas las patentes registradas en la clase G06V () entre las que se encuentra la patente MÉTODO PARA LA REALIZACIÓN DE TAREAS EN UN OBJETO Y SISTEMA DE VEHÍCULOS NO TRIPULADOS con el número P202230607. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase G06T
Es posible conocer todas las patentes registradas en la clase G06T (TRATAMIENTO O GENERACIÓN DE DATOS DE IMAGEN, EN GENERAL ) entre las que se encuentra la patente MÉTODO PARA LA REALIZACIÓN DE TAREAS EN UN OBJETO Y SISTEMA DE VEHÍCULOS NO TRIPULADOS con el número P202230607. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase B64U
Es posible conocer todas las patentes registradas en la clase B64U () entre las que se encuentra la patente MÉTODO PARA LA REALIZACIÓN DE TAREAS EN UN OBJETO Y SISTEMA DE VEHÍCULOS NO TRIPULADOS con el número P202230607. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.
¿Tienes alguna duda?
Escribe tu consulta y te responderemos rápida y gratuitamente.

Otras patentes similares
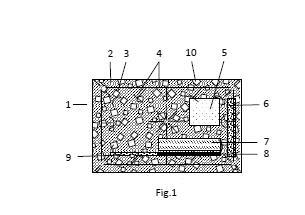
 P202230604
P202230604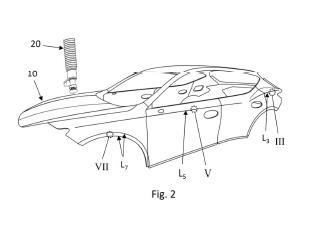 P202230605
P202230605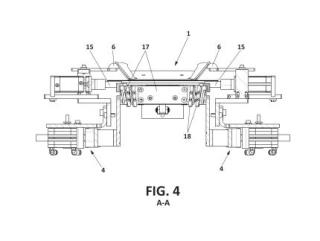
Profesionales Recomendados
Barcelona
933182440
España
933182440
España

Barcelona
+34 93 362 16 97
España
+34 93 362 16 97
España

Barcelona
932 593 600
España
932 593 600
España







