


- Home /
- Publicaciones de patentes /
- DISPOSITIVO PARA NAVEGACIÓN 3D INTEGRADO EN UN ROBOT QUIRÚRGICO
Patente nacional por "DISPOSITIVO PARA NAVEGACIÓN 3D INTEGRADO EN UN ROBOT QUIRÚRGICO"
Este registro ha sido solicitado por
CELLA MEDICAL SOLUTIONS S.L.
a través del representanteMARIA DESAMPARADOS DIAZ PACHECO
Contacto
- Estado: Vigente
- País:
- España
- Fecha solicitud:
- 26/08/2022
- Número solicitud:
-
P202230768
- Número publicación:
-
ES2963243
- Fecha de concesión:
-
- Inventores:
-
Persona física
- Datos del titular:
-
CELLA MEDICAL SOLUTIONS S.L.
- Datos del representante:
-
MARIA DESAMPARADOS DIAZ PACHECO
- Clasificación Internacional de Patentes:
- A61B 34/37
- Clasificación Internacional de Patentes de la publicación:
- A61B 34/37
- Fecha de vencimiento:
Quiero registrar una patente

Reivindicaciones:
+ ES-2963243_A11.- Dispositivo para navegación 3D integrado en un robot quirúrgico (1) que, comprendiendo: - una consola (2) que, a su vez, comprende: un visor (4) con una pantalla (5) interior protegida por una carcasa (6) envolvente; y unos mandos de manejo manual (7) y pedales (8) como controles del cirujano para manejar distancia un endoscopio (9) y otros instrumentos (10) mostrando la pantalla (5) , entre otra información, la imagen que capta el endoscopio (9) de la zona de intervención; - un carro quirúrgico (11) con brazos robóticos (13) que sostienen los instrumentos (10) y la cámara del endoscopio (9) sobre el paciente; y - una torre de visión (14) que aloja un equipo de visualización, con monitores (15) y una unidad de procesamiento central (16) ; está caracterizado por comprender además un dispositivo para navegación 3D (19) , de modelos de planificación tridimensionales de la estructura o estructuras anatómicas del paciente a intervenir, el cual dispositivo (19) se encuentra integrado en la consola (2) de manejo del robot (1) , de modo que forma parte adicional de la misma; porque dicho dispositivo (19) cuenta, al menos, con una interfaz (20) de usuario que se encuentra incorporada junto a la carcasa (6) del visor (4) de la consola (2) siendo fácilmente accesible para que el cirujano que maneja dicha consola (2) ; y porque el procesador de dicho dispositivo (19) está conectado a la unidad de procesamiento central (16) del robot (1) con un software apto para que la imagen del modelo en 3D (I) se replique en la pantalla (5) del visor (4) de la consola (2) . 2.- Dispositivo para navegación 3D integrado en un robot quirúrgico, según a reivindicación 1, caracterizado porque la interfaz (20) del dispositivo para navegación 3D (19) es una pantalla táctil. 3. - Dispositivo para navegación 3D integrado en un robot quirúrgico, según la reivindicación 1, caracterizado porque la interfaz (20) del dispositivo para navegación 3D (19) es una botonera. 4.- Dispositivo para navegación 3D integrado en un robot quirúrgico, según cualquiera de las reivindicaciones anteriores, caracterizado porque la interfaz (20) del dispositivo para navegación 3D (19) es está incorporada a la consola (2) mediante un soporte regulable (21) . 5.- Dispositivo para navegación 3D integrado en un robot quirúrgico, según la reivindicación 5, caracterizado porque el soporte regulable es un brazo articulado (21) que se acopla a un lateral de la carcasa (5) del visor (4) . 6.- Dispositivo para navegación 3D integrado en un robot quirúrgico, según la reivindicación 5, caracterizado porque el brazo articulado (21) se acopla, a través de un anclaje (22) deslizable, a una guía (23) prevista horizontalmente junto a la carcasa (5) . 7.- Dispositivo para navegación 3D integrado en un robot quirúrgico, según la reivindicación 6, caracterizado porque el anclaje (22) es desmontable. 8.- Dispositivo para navegación 3D integrado en un robot quirúrgico, según cualquiera de las reivindicaciones anteriores, caracterizado porque es controlado mediante comandos de voz.
Los productos y servicios protegidos por este registro son:
A61B 34/37
Descripciones:
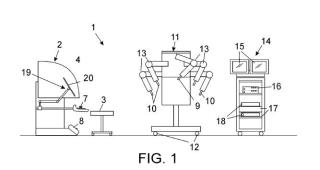
+ ES-2963243_A1 DISPOSITIVO PARA NAVEGACIÓN 3D INTEGRADO EN UN ROBOT QUIRÚRGICO OBJETO DE LA INVENCIÓN La invención, tal como expresa el enunciado de la presente memoria descriptiva, se refiere a un dispositivo para navegación 3D integrado en un robot quirúrgico, aportando, a la función a que se destina, ventajas y características, que se describen en detalle más adelante, que suponen una mejora del estado actual de la técnica. El objeto de la presente invención recae en un dispositivo para navegación 3D integrado en un robot quirúrgico, por ejemplo en un equipo de cirugía robótica del tipo denominado DaVinci que, básicamente, es manejado por el cirujano desde una consola ergonómica con la que controla de modo remoto, aunque normalmente desde la misma sala, un carro con brazos robóticos en cuyos extremos se acoplan las herramientas quirúrgicas, facilitando un enfoque mínimamente invasivo en cirugías complejas que permite superar las limitaciones propias de la cirugía abierta y laparoscópica. En concreto, el dispositivo para navegación 3D integrado en un robot quirúrgico se distingue estar integrar en la consola del robot quirúrgico, un dispositivo para la navegación en modelos de planificación 3D de estructuras anatómicas previamente obtenidos con una interfaz de usuario, que de preferencia consiste en una pantalla táctil, la cual se encuentra incorporada junto a la carcasa de la consola de modo que es fácilmente accesible para el cirujano y cuya imagen se replica en el visor de la misma. CAMPO DE APLICACIÓN DE LA INVENCIÓN El campo de aplicación de la presente invención se enmarca dentro del sector de la industria dedicada a la fabricación de aparatos y equipos médicos, centrándose particularmente en el ámbito de los robots quirúrgicos, abarcando al mismo tiempo el ámbito de los dispositivos para navegación en modelos 3D. ANTECEDENTES DE LA INVENCIÓN Como es sabido, la tecnología tridimensional (3D) está transformando la atención médica y la práctica clínica permitiendo una atención más personalizada. En el área de la cirugía el progreso en los dispositivos digitales ha mejorado significativamente y los actuales sistemas de reconstrucción 3D de última generación permiten una representación especialmente precisa de la anatomía. Por ejemplo, en cirugía hepática supone una herramienta de gran utilidad en las diferentes etapas de un procedimiento quirúrgico complejo. Tanto desde las fases previas a la intervención para la planificación quirúrgica, como durante la intervención al poder utilizarse como guía durante la cirugía. A partir de las imágenes médicas del paciente (TAC (tomografía axial computarizada) , RMN (resonancia magnética nuclear) , PET (tomografía de emisión de positrones) o combinación de ellos) , se realiza un proceso de segmentación computarizada de las estructuras anatómicas, esto da como resultado un modelo 3D de las diferentes estructuras anatómicas. Por otra parte, en la última década ha existido una gran evolución de la cirugía mínimamente invasiva en general y de la cirugía hepática en particular mediante equipos robotizados. El abordaje laparoscópico es el ás utilizado dentro de la mayoría de los cirujanos hepatobiliares, aunque se espera que en los próximos años la cirugía robótica cobre un mayor protagonismo. Entre las ventajas de la robótica sobre la hepatectomía laparoscópica se encuentran el aumento de los grados de libertad de movimientos de los instrumentos, la supresión del temblor fisiológico de la mano, la visión en 3 dimensiones o la disminución de la fatiga del cirujano. También permite un mejor acceso a los segmentos posteriores o las venas hepáticas al facilitar la disección retrohepática y reduce la complejidad de la sutura intracorpórea en lugares de difícil acceso. El sistema quirúrgico Da Vinci es un equipo de cirugía robótica idóneo que se suele emplear mayormente para este tipo de intervenciones. Se trata de un dispositivo desarrollado por la empresa norteamericana Intuitive Surgical y aprobado, en el año 2000, por la Administración de Alimentos y Medicamentos (FDA) de los Estados Unidos, que se utiliza para múltiples procedimientos quirúrgicos y que, básicamente, está controlado por un cirujano que opera desde una consola Más específicamente, el robot quirúrgico se compone, esencialmente, de una consola ergonómica desde la que el cirujano opera sentado y que, normalmente, se encuentra en el mismo quirófano; una torre de visión (formada por controladores, vídeo, audio y proceso de imagen) ; y un carro quirúrgico, que se sitúa al lado del paciente y que incorpora varios brazos robóticos interactivos controlados desde la consola, en el extremo de los cuales se encuentran acopladas las distintas herramientas que el médico necesita para operar, tales como endoscopio, bisturís, tijeras, unipolar, etc. Así pues, actualmente nos encontramos en una nueva era donde el modo tradicional de diagnóstico y tratamiento en cirugía, y especialmente en cirugía hepática, está cambiando debido al desarrollo en la tecnología de imágenes médicas digitales y la aplicación de tecnología inteligente con la isualización tridimensional y cirugía de simulación virtual, la realidad virtual, la inteligencia artificial o la tecnología de navegación en cirugía abdominal. Dentro de este marco de avances tecnológicos sería deseable integrar las imágenes de los pacientes de forma simultánea con la cirugía. El problema es que, el cirujano que maneja el robot, debe permanecer con la cabeza metida en la carcasa de la consola donde se aloja el visor que le permite visualizar la zona de intervención y, cuando desea o necesita atender y manipular la imagen del modelo en 3D en el navegador, que es un equipo independiente, debe sacar la cabeza de la carcasa y abandonar la consola para acceder a los mandos de dicho navegador y, por tanto, perder de vista el visor e, incluso, dejar de sujetar los mandos de la consola, lo cual puede suponer un riesgo para la operación y para el paciente y, en todo caso, un engorro y pérdida de tiempo para el cirujano. El objetivo de la presente invención es, pues, el desarrollo de un dispositivo para navegación 3D integrado en un robot quirúrgico que permita que el modelo 3D del órgano anatómico que se está operando esté integrado en el robot de tal modo que la imagen o "planner" de dicho modelo se pueda trasladar a la propia pantalla o visor del interior de la consola que maneja el cirujano durante la intervención y, además, pueda manejarlo sin necesidad de moverse de la consola, de tal modo que se evita cualquier riesgo y se facilita el trabajo y comodidad del cirujano. Por otra parte, y como referencia al estado actual de la técnica, cabe señalar que, si bien son conocidos, tanto los robots quirúrgicos como los dispositivos para navegación en modelos 3D de estructuras anatómicas, al menos por parte del solicitante, se desconoce la existencia de ningún otro robot quirúrgico que integre uno de dichos dispositivos en el mismo ni que presente unas características técnicas y estructurales iguales o semejantes las que presenta el que aquí se reivindica. EXPLICACIÓN DE LA INVENCIÓN El dispositivo para navegación 3D integrado en un robot quirúrgico que la invención propone se configura como una solución idónea al objetivo anteriormente señalado que, a su vez, supone una mejora del estado actual de la técnica, estando los detalles caracterizadores que lo hacen posible y que lo distinguen convenientemente recogidos en las reivindicaciones finales que acompañan a la presente descripción. Concretamente, lo que la invención propone, como se ha apuntado anteriormente, es dispositivo para navegación 3D integrado en un robot quirúrgico, por ejemplo uno del tipo consistente en un equipo de cirugía robótica, como el denominado Da Vinci, que, básicamente, comprende una consola ergonómica con la que el cirujano controla de modo remoto, normalmente en la misma sala de operaciones, los brazos robóticos de un carro quirúrgico ubicado junto al paciente y en cuyos extremos se acoplan las herramientas quirúrgicas. El dispositivo para navegación 3D integrado en un robot quirúrgico se distingue por comprender, integrado en la propia consola de manejo del robot, un dispositivo para la navegación en modelos 3D, normalmente modelos de planificación tridimensionales de estructuras anatómicas del paciente a intervenir previamente obtenidos, el cual dispositivo cuenta, al menos, con una interfaz de usuario que se encuentra incorporada junto a la carcasa del visor de la consola, de modo que es fácilmente accesible para el cirujano, y en que la imagen del modelo en 3D se replica en la pantalla de dicho visor de la consola. De este modo, el cirujano, sin necesidad de abandonar la consola ni apartar a vista del visor, puede navegar con el dispositivo a través del modelo planificado en 3D del órgano en cuestión, manejando la interfaz de usuario con una mano, para interactuar con el modelo 3D y enfocarlo, ampliarlo, girarlo, etc., y viendo la imagen de dicho modelo 3D en la propia pantalla del visor de la consola, junto a la imagen de la zona de intervención que, al mismo tiempo, le estará proporcionando la torre de visión del robot y que podrá seguir manejando, al menos con la otra mano y con los pies, a través de los mandos y pedales de la consola. De preferencia, la interfaz del dispositivo navegador que incorpora el robot integrado en la consola consiste en una pantalla táctil, si bien, no se descartan otras forma de realización en que dicha interfaz pueda consistir en una botonera, en un joystick o en algún otro instrumento apto para la función que requiere. No obstante, la opción de la pantalla táctil es la preferida, al permitir que, siempre que el operador lo desee, también podrá ver la imagen del modelo 3D a través de la misma, así como cualquier otra persona integrante del equipo de profesionales que suelen acompañar al cirujano en las intervenciones y manejo del robot. En cualquier caso, de preferencia, dicha interfaz está incorporada en un soporte regulable, de preferencia un brazo articulado, que se acopla lateralmente a la carcasa de la consola, de manera que queda cerca del cirujano que maneja el robot y, a su vez, este la puede mover con facilidad para situarla en cualquier posición que mejor le convenga para su manipulación sin verla. En cualquier caso, de preferencia, el dispositivo para navegación 3D integrado en un robot quirúrgico puede ser controlado mediante comandos de voz. Lógicamente, el dispositivo de navegación 3D contará con un software y ardware compatibles para su vinculación al software y hardware del equipo quirúrgico robotizado, de tal modo que en el visor sea posible reproducir la réplica de la imagen del modelo 3D en diferentes posiciones y tamaños y sin que afecte a la imagen que proporciona la torre de visión sobre la zona de intervención de los brazos robóticos y/o al acceso a los menús de navegación del robot. Entre otras funcionalidades que puede realizar el sofware que reproduce la réplica de la imagen del modelo 3D destacan las siguientes: Mostrar línea de cortes para resecciones regladas. Trasladar planos de corte de resecciones no regladas. Visualizador DICOM Visualizador Informe. Tiempo, cronómetro, cuenta atrás. Vistas guardadas Perspectiva de visualización (desde cámara endoscopia) Colocación trócares. DESCRIPCIÓN DE LOS DIBUJOS Para complementar la descripción que se está realizando y con objeto de ayudar a una mejor comprensión de las características de la invención, se acompaña a la presente memoria descriptiva, como parte integrante de la misma, un plano en el que con carácter ilustrativo y no limitativo se ha representado lo siguiente: La figura número 1.- Muestra una vista esquemática en alzado de un ejemplo de realización del dispositivo para navegación 3D integrado en un robot quirúrgico objeto de la invención, apreciándose las principales partes y elementos que comprende, así como la configuración y disposición de las ismas; las figuras número 2 y 3.- Muestran sendas vistas esquemáticas, en alzado lateral y frontal respectivamente, de la consola que comprende el dispositivo para navegación 3D integrado en un robot quirúrgico de la invención, apreciándose la disposición del dispositivo para navegación 3D que incorpora junto a la carcasa del visor con la réplica de imagen en su pantalla; y la figura número 4.- Muestra una representación esquemática de la réplica del modelo 3D del navegador que muestra la pantalla del visor de la consola del dispositivo para navegación 3D integrado en un robot quirúrgico de la invención. REALIZACIÓN PREFERENTE DE LA INVENCIÓN A la vista de las descritas figuras, y de acuerdo con la numeración adoptada, se puede observar en ellas un ejemplo de realización no limitativa del dispositivo para navegación 3D integrado en un robot quirúrgico de la invención, el cual comprende lo que se describe en detalle a continuación. Así, tal como se observa en la representación esquemática de la figura 1, el dispositivo para navegación 3D integrado en un robot quirúrgico (1) de los que comprende, esencialmente: - Una consola (2) de manejo, frente a la que se coloca una silla (3) donde se sienta el cirujano fuera del campo estéril, la cual, a su vez, comprende: - un visor (4) con una pantalla (5) interior protegida por una carcasa (6) envolvente donde el cirujano puede meter la cabeza; - unos mandos de manejo manual (7) ; y - unos pedales (8) ; tal que mediante dichos controles (7, 8) el cirujano maneja a distancia un endoscopio (9) y otros instrumentos (10) y el sistema interpreta sus movimientos y los traduce a escala con movimientos precisos a la vez que se muestra en la pantalla (5) del visor (4) , entre otra información, la imagen que capta el endoscopio (9) de la zona de intervención. - Un carro quirúrgico (11) , conformado por una estructura de soporte, preferentemente dotada de ruedas (12) para facilitar su traslado, en la que se incorporan una serie de brazos robóticos (13) , entre tres o cuatro o incluso más, que sostienen los instrumentos (10) y la cámara del endoscopio (9) sobre la mesa de operaciones en que se sitúa el paciente, estando vinculados a un centro de control, que es un punto fijo alrededor del cual se mueven dichos brazos (12) , que permite que el sistema los mueva en la zona de la operación, ejerciendo la mínima presión en la pared del cuerpo del paciente. - Y una torre de visión (14) que, preferentemente diseñada también a modo de estructura móvil, aloja un equipo de visualización, formado por uno o dos monitores (15) y una unidad de procesamiento central (16) del robot (1) a la que están conectados el resto de elementos de modo inalámbrico. Opcionalmente, la torre de visión (14) cuenta además con estantes regulables (17) para incorporar otros instrumentos quirúrgicos auxiliares opcionales (18) , como unidades electroquirúrgicas (ESU) e insufladores. Y, a partir de dicha configuración ya conocida, el dispositivo para navegación 3D integrado en un robot quirúrgico (1) de la invención se distingue por comprender además un dispositivo para navegación 3D (19) , más específicamente para navegación de modelos de planificación ridimensionales de la estructura o estructuras anatómicas del paciente a intervenir, obtenidos previamente a partir de imágenes médicas del paciente tales como TAC, RMN, PET o combinación de ellas, el cual dispositivo (19) se encuentra integrado en la propia consola (2) de manejo del robot (1) , de modo que forma parte adicional de la misma, y donde dicho dispositivo (19) cuenta, al menos, con una interfaz (20) de usuario que se encuentra incorporada junto a la carcasa (6) del visor (4) de la consola (2) siendo fácilmente accesible para que el cirujano que maneja dicha consola (2) pueda manipular dicha interfaz (20) sin moverse de la silla (3) de la consola (2) , y donde el procesador de dicho dispositivo (19) está conectado a la unidad de procesamiento central (16) del robot (1) con un software apto para que la imagen del modelo en 3D (I) se replique en la pantalla (5) del visor (4) de la consola (2) en paralelo o no con otra información y/o con la imagen que capta el endoscopio (9) de la zona de intervención. En la figura 4 se ha representado esquemáticamente dicha pantalla (5) del visor (4) con los dos tipos de imágenes mostradas simultáneamente. Atendiendo a las figuras 2 y 3, se observa cómo, en una forma de realización preferida de la invención, la interfaz (20) del dispositivo para navegación 3D (19) es una pantalla táctil. No obstante, en otras formas de realización no representadas, la interfaz (20) puede consistir en una botonera, en un joystick o en algún otro instrumento similar. Por otra parte, de preferencia, la interfaz (20) del dispositivo (19) está incorporada a la consola (2) mediante un soporte regulable (21) que permite posicionarla según convenga al cirujano en cada caso. De preferencia, dicho soporte regulable (21) , es un brazo articulado, que se acopla a un lateral de la carcasa (5) del visor (4) . De preferencia, dicho brazo articulado (21) se acopla, a través de un anclaje (22) deslizable, a una guía (23) prevista horizontalmente junto a la carcasa (5) , tal que el conjunto se puede desplazar en cualquiera de los tres ejes de espacio en un amplio radio de traslación. De preferencia, el anclaje (22) es fácilmente desmontable para poder incorporar o no el brazo (21) con el dispositivo (19) al robot (1) , según las necesidades de cada caso o para facilitar su sustitución y almacenaje. En cualquier caso, de preferencia, el dispositivo para navegación 3D integrado en un robot quirúrgico puede ser controlado mediante comandos de voz. Descrita suficientemente la naturaleza de la presente invención, así como la manera de ponerla en práctica, no se considera necesario hacer más extensa su explicación para que cualquier experto en la materia comprenda su alcance y las ventajas que de ella se derivan.
Publicaciones:
ES2963243 (25/03/2024) - A1 Solicitud de patente con informe sobre el estado de la técnica
Eventos:
En fecha 26/08/2022 se realizó Registro Instancia de Solicitud
En fecha 26/08/2022 se realizó Admisión a Trámite
En fecha 26/08/2022 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 29/08/2022 se realizó Superado examen de oficio
En fecha 01/12/2023 se realizó Realizado IET
En fecha 07/12/2023 se realizó 1109P_Comunicación Traslado del IET
En fecha 25/03/2024 se realizó Publicación Solicitud
En fecha 25/03/2024 se realizó Publicación Folleto Solicitud con IET (A1)
Pagos:
25/08/2022 - Pago Tasas IET
+ ES-2963243_A11.- Dispositivo para navegación 3D integrado en un robot quirúrgico (1) que, comprendiendo: - una consola (2) que, a su vez, comprende: un visor (4) con una pantalla (5) interior protegida por una carcasa (6) envolvente; y unos mandos de manejo manual (7) y pedales (8) como controles del cirujano para manejar distancia un endoscopio (9) y otros instrumentos (10) mostrando la pantalla (5) , entre otra información, la imagen que capta el endoscopio (9) de la zona de intervención; - un carro quirúrgico (11) con brazos robóticos (13) que sostienen los instrumentos (10) y la cámara del endoscopio (9) sobre el paciente; y - una torre de visión (14) que aloja un equipo de visualización, con monitores (15) y una unidad de procesamiento central (16) ; está caracterizado por comprender además un dispositivo para navegación 3D (19) , de modelos de planificación tridimensionales de la estructura o estructuras anatómicas del paciente a intervenir, el cual dispositivo (19) se encuentra integrado en la consola (2) de manejo del robot (1) , de modo que forma parte adicional de la misma; porque dicho dispositivo (19) cuenta, al menos, con una interfaz (20) de usuario que se encuentra incorporada junto a la carcasa (6) del visor (4) de la consola (2) siendo fácilmente accesible para que el cirujano que maneja dicha consola (2) ; y porque el procesador de dicho dispositivo (19) está conectado a la unidad de procesamiento central (16) del robot (1) con un software apto para que la imagen del modelo en 3D (I) se replique en la pantalla (5) del visor (4) de la consola (2) . 2.- Dispositivo para navegación 3D integrado en un robot quirúrgico, según a reivindicación 1, caracterizado porque la interfaz (20) del dispositivo para navegación 3D (19) es una pantalla táctil. 3. - Dispositivo para navegación 3D integrado en un robot quirúrgico, según la reivindicación 1, caracterizado porque la interfaz (20) del dispositivo para navegación 3D (19) es una botonera. 4.- Dispositivo para navegación 3D integrado en un robot quirúrgico, según cualquiera de las reivindicaciones anteriores, caracterizado porque la interfaz (20) del dispositivo para navegación 3D (19) es está incorporada a la consola (2) mediante un soporte regulable (21) . 5.- Dispositivo para navegación 3D integrado en un robot quirúrgico, según la reivindicación 5, caracterizado porque el soporte regulable es un brazo articulado (21) que se acopla a un lateral de la carcasa (5) del visor (4) . 6.- Dispositivo para navegación 3D integrado en un robot quirúrgico, según la reivindicación 5, caracterizado porque el brazo articulado (21) se acopla, a través de un anclaje (22) deslizable, a una guía (23) prevista horizontalmente junto a la carcasa (5) . 7.- Dispositivo para navegación 3D integrado en un robot quirúrgico, según la reivindicación 6, caracterizado porque el anclaje (22) es desmontable. 8.- Dispositivo para navegación 3D integrado en un robot quirúrgico, según cualquiera de las reivindicaciones anteriores, caracterizado porque es controlado mediante comandos de voz.
Los productos y servicios protegidos por este registro son:
A61B 34/37
Descripciones:
+ ES-2963243_A1 DISPOSITIVO PARA NAVEGACIÓN 3D INTEGRADO EN UN ROBOT QUIRÚRGICO OBJETO DE LA INVENCIÓN La invención, tal como expresa el enunciado de la presente memoria descriptiva, se refiere a un dispositivo para navegación 3D integrado en un robot quirúrgico, aportando, a la función a que se destina, ventajas y características, que se describen en detalle más adelante, que suponen una mejora del estado actual de la técnica. El objeto de la presente invención recae en un dispositivo para navegación 3D integrado en un robot quirúrgico, por ejemplo en un equipo de cirugía robótica del tipo denominado DaVinci que, básicamente, es manejado por el cirujano desde una consola ergonómica con la que controla de modo remoto, aunque normalmente desde la misma sala, un carro con brazos robóticos en cuyos extremos se acoplan las herramientas quirúrgicas, facilitando un enfoque mínimamente invasivo en cirugías complejas que permite superar las limitaciones propias de la cirugía abierta y laparoscópica. En concreto, el dispositivo para navegación 3D integrado en un robot quirúrgico se distingue estar integrar en la consola del robot quirúrgico, un dispositivo para la navegación en modelos de planificación 3D de estructuras anatómicas previamente obtenidos con una interfaz de usuario, que de preferencia consiste en una pantalla táctil, la cual se encuentra incorporada junto a la carcasa de la consola de modo que es fácilmente accesible para el cirujano y cuya imagen se replica en el visor de la misma. CAMPO DE APLICACIÓN DE LA INVENCIÓN El campo de aplicación de la presente invención se enmarca dentro del sector de la industria dedicada a la fabricación de aparatos y equipos médicos, centrándose particularmente en el ámbito de los robots quirúrgicos, abarcando al mismo tiempo el ámbito de los dispositivos para navegación en modelos 3D. ANTECEDENTES DE LA INVENCIÓN Como es sabido, la tecnología tridimensional (3D) está transformando la atención médica y la práctica clínica permitiendo una atención más personalizada. En el área de la cirugía el progreso en los dispositivos digitales ha mejorado significativamente y los actuales sistemas de reconstrucción 3D de última generación permiten una representación especialmente precisa de la anatomía. Por ejemplo, en cirugía hepática supone una herramienta de gran utilidad en las diferentes etapas de un procedimiento quirúrgico complejo. Tanto desde las fases previas a la intervención para la planificación quirúrgica, como durante la intervención al poder utilizarse como guía durante la cirugía. A partir de las imágenes médicas del paciente (TAC (tomografía axial computarizada) , RMN (resonancia magnética nuclear) , PET (tomografía de emisión de positrones) o combinación de ellos) , se realiza un proceso de segmentación computarizada de las estructuras anatómicas, esto da como resultado un modelo 3D de las diferentes estructuras anatómicas. Por otra parte, en la última década ha existido una gran evolución de la cirugía mínimamente invasiva en general y de la cirugía hepática en particular mediante equipos robotizados. El abordaje laparoscópico es el ás utilizado dentro de la mayoría de los cirujanos hepatobiliares, aunque se espera que en los próximos años la cirugía robótica cobre un mayor protagonismo. Entre las ventajas de la robótica sobre la hepatectomía laparoscópica se encuentran el aumento de los grados de libertad de movimientos de los instrumentos, la supresión del temblor fisiológico de la mano, la visión en 3 dimensiones o la disminución de la fatiga del cirujano. También permite un mejor acceso a los segmentos posteriores o las venas hepáticas al facilitar la disección retrohepática y reduce la complejidad de la sutura intracorpórea en lugares de difícil acceso. El sistema quirúrgico Da Vinci es un equipo de cirugía robótica idóneo que se suele emplear mayormente para este tipo de intervenciones. Se trata de un dispositivo desarrollado por la empresa norteamericana Intuitive Surgical y aprobado, en el año 2000, por la Administración de Alimentos y Medicamentos (FDA) de los Estados Unidos, que se utiliza para múltiples procedimientos quirúrgicos y que, básicamente, está controlado por un cirujano que opera desde una consola Más específicamente, el robot quirúrgico se compone, esencialmente, de una consola ergonómica desde la que el cirujano opera sentado y que, normalmente, se encuentra en el mismo quirófano; una torre de visión (formada por controladores, vídeo, audio y proceso de imagen) ; y un carro quirúrgico, que se sitúa al lado del paciente y que incorpora varios brazos robóticos interactivos controlados desde la consola, en el extremo de los cuales se encuentran acopladas las distintas herramientas que el médico necesita para operar, tales como endoscopio, bisturís, tijeras, unipolar, etc. Así pues, actualmente nos encontramos en una nueva era donde el modo tradicional de diagnóstico y tratamiento en cirugía, y especialmente en cirugía hepática, está cambiando debido al desarrollo en la tecnología de imágenes médicas digitales y la aplicación de tecnología inteligente con la isualización tridimensional y cirugía de simulación virtual, la realidad virtual, la inteligencia artificial o la tecnología de navegación en cirugía abdominal. Dentro de este marco de avances tecnológicos sería deseable integrar las imágenes de los pacientes de forma simultánea con la cirugía. El problema es que, el cirujano que maneja el robot, debe permanecer con la cabeza metida en la carcasa de la consola donde se aloja el visor que le permite visualizar la zona de intervención y, cuando desea o necesita atender y manipular la imagen del modelo en 3D en el navegador, que es un equipo independiente, debe sacar la cabeza de la carcasa y abandonar la consola para acceder a los mandos de dicho navegador y, por tanto, perder de vista el visor e, incluso, dejar de sujetar los mandos de la consola, lo cual puede suponer un riesgo para la operación y para el paciente y, en todo caso, un engorro y pérdida de tiempo para el cirujano. El objetivo de la presente invención es, pues, el desarrollo de un dispositivo para navegación 3D integrado en un robot quirúrgico que permita que el modelo 3D del órgano anatómico que se está operando esté integrado en el robot de tal modo que la imagen o "planner" de dicho modelo se pueda trasladar a la propia pantalla o visor del interior de la consola que maneja el cirujano durante la intervención y, además, pueda manejarlo sin necesidad de moverse de la consola, de tal modo que se evita cualquier riesgo y se facilita el trabajo y comodidad del cirujano. Por otra parte, y como referencia al estado actual de la técnica, cabe señalar que, si bien son conocidos, tanto los robots quirúrgicos como los dispositivos para navegación en modelos 3D de estructuras anatómicas, al menos por parte del solicitante, se desconoce la existencia de ningún otro robot quirúrgico que integre uno de dichos dispositivos en el mismo ni que presente unas características técnicas y estructurales iguales o semejantes las que presenta el que aquí se reivindica. EXPLICACIÓN DE LA INVENCIÓN El dispositivo para navegación 3D integrado en un robot quirúrgico que la invención propone se configura como una solución idónea al objetivo anteriormente señalado que, a su vez, supone una mejora del estado actual de la técnica, estando los detalles caracterizadores que lo hacen posible y que lo distinguen convenientemente recogidos en las reivindicaciones finales que acompañan a la presente descripción. Concretamente, lo que la invención propone, como se ha apuntado anteriormente, es dispositivo para navegación 3D integrado en un robot quirúrgico, por ejemplo uno del tipo consistente en un equipo de cirugía robótica, como el denominado Da Vinci, que, básicamente, comprende una consola ergonómica con la que el cirujano controla de modo remoto, normalmente en la misma sala de operaciones, los brazos robóticos de un carro quirúrgico ubicado junto al paciente y en cuyos extremos se acoplan las herramientas quirúrgicas. El dispositivo para navegación 3D integrado en un robot quirúrgico se distingue por comprender, integrado en la propia consola de manejo del robot, un dispositivo para la navegación en modelos 3D, normalmente modelos de planificación tridimensionales de estructuras anatómicas del paciente a intervenir previamente obtenidos, el cual dispositivo cuenta, al menos, con una interfaz de usuario que se encuentra incorporada junto a la carcasa del visor de la consola, de modo que es fácilmente accesible para el cirujano, y en que la imagen del modelo en 3D se replica en la pantalla de dicho visor de la consola. De este modo, el cirujano, sin necesidad de abandonar la consola ni apartar a vista del visor, puede navegar con el dispositivo a través del modelo planificado en 3D del órgano en cuestión, manejando la interfaz de usuario con una mano, para interactuar con el modelo 3D y enfocarlo, ampliarlo, girarlo, etc., y viendo la imagen de dicho modelo 3D en la propia pantalla del visor de la consola, junto a la imagen de la zona de intervención que, al mismo tiempo, le estará proporcionando la torre de visión del robot y que podrá seguir manejando, al menos con la otra mano y con los pies, a través de los mandos y pedales de la consola. De preferencia, la interfaz del dispositivo navegador que incorpora el robot integrado en la consola consiste en una pantalla táctil, si bien, no se descartan otras forma de realización en que dicha interfaz pueda consistir en una botonera, en un joystick o en algún otro instrumento apto para la función que requiere. No obstante, la opción de la pantalla táctil es la preferida, al permitir que, siempre que el operador lo desee, también podrá ver la imagen del modelo 3D a través de la misma, así como cualquier otra persona integrante del equipo de profesionales que suelen acompañar al cirujano en las intervenciones y manejo del robot. En cualquier caso, de preferencia, dicha interfaz está incorporada en un soporte regulable, de preferencia un brazo articulado, que se acopla lateralmente a la carcasa de la consola, de manera que queda cerca del cirujano que maneja el robot y, a su vez, este la puede mover con facilidad para situarla en cualquier posición que mejor le convenga para su manipulación sin verla. En cualquier caso, de preferencia, el dispositivo para navegación 3D integrado en un robot quirúrgico puede ser controlado mediante comandos de voz. Lógicamente, el dispositivo de navegación 3D contará con un software y ardware compatibles para su vinculación al software y hardware del equipo quirúrgico robotizado, de tal modo que en el visor sea posible reproducir la réplica de la imagen del modelo 3D en diferentes posiciones y tamaños y sin que afecte a la imagen que proporciona la torre de visión sobre la zona de intervención de los brazos robóticos y/o al acceso a los menús de navegación del robot. Entre otras funcionalidades que puede realizar el sofware que reproduce la réplica de la imagen del modelo 3D destacan las siguientes: Mostrar línea de cortes para resecciones regladas. Trasladar planos de corte de resecciones no regladas. Visualizador DICOM Visualizador Informe. Tiempo, cronómetro, cuenta atrás. Vistas guardadas Perspectiva de visualización (desde cámara endoscopia) Colocación trócares. DESCRIPCIÓN DE LOS DIBUJOS Para complementar la descripción que se está realizando y con objeto de ayudar a una mejor comprensión de las características de la invención, se acompaña a la presente memoria descriptiva, como parte integrante de la misma, un plano en el que con carácter ilustrativo y no limitativo se ha representado lo siguiente: La figura número 1.- Muestra una vista esquemática en alzado de un ejemplo de realización del dispositivo para navegación 3D integrado en un robot quirúrgico objeto de la invención, apreciándose las principales partes y elementos que comprende, así como la configuración y disposición de las ismas; las figuras número 2 y 3.- Muestran sendas vistas esquemáticas, en alzado lateral y frontal respectivamente, de la consola que comprende el dispositivo para navegación 3D integrado en un robot quirúrgico de la invención, apreciándose la disposición del dispositivo para navegación 3D que incorpora junto a la carcasa del visor con la réplica de imagen en su pantalla; y la figura número 4.- Muestra una representación esquemática de la réplica del modelo 3D del navegador que muestra la pantalla del visor de la consola del dispositivo para navegación 3D integrado en un robot quirúrgico de la invención. REALIZACIÓN PREFERENTE DE LA INVENCIÓN A la vista de las descritas figuras, y de acuerdo con la numeración adoptada, se puede observar en ellas un ejemplo de realización no limitativa del dispositivo para navegación 3D integrado en un robot quirúrgico de la invención, el cual comprende lo que se describe en detalle a continuación. Así, tal como se observa en la representación esquemática de la figura 1, el dispositivo para navegación 3D integrado en un robot quirúrgico (1) de los que comprende, esencialmente: - Una consola (2) de manejo, frente a la que se coloca una silla (3) donde se sienta el cirujano fuera del campo estéril, la cual, a su vez, comprende: - un visor (4) con una pantalla (5) interior protegida por una carcasa (6) envolvente donde el cirujano puede meter la cabeza; - unos mandos de manejo manual (7) ; y - unos pedales (8) ; tal que mediante dichos controles (7, 8) el cirujano maneja a distancia un endoscopio (9) y otros instrumentos (10) y el sistema interpreta sus movimientos y los traduce a escala con movimientos precisos a la vez que se muestra en la pantalla (5) del visor (4) , entre otra información, la imagen que capta el endoscopio (9) de la zona de intervención. - Un carro quirúrgico (11) , conformado por una estructura de soporte, preferentemente dotada de ruedas (12) para facilitar su traslado, en la que se incorporan una serie de brazos robóticos (13) , entre tres o cuatro o incluso más, que sostienen los instrumentos (10) y la cámara del endoscopio (9) sobre la mesa de operaciones en que se sitúa el paciente, estando vinculados a un centro de control, que es un punto fijo alrededor del cual se mueven dichos brazos (12) , que permite que el sistema los mueva en la zona de la operación, ejerciendo la mínima presión en la pared del cuerpo del paciente. - Y una torre de visión (14) que, preferentemente diseñada también a modo de estructura móvil, aloja un equipo de visualización, formado por uno o dos monitores (15) y una unidad de procesamiento central (16) del robot (1) a la que están conectados el resto de elementos de modo inalámbrico. Opcionalmente, la torre de visión (14) cuenta además con estantes regulables (17) para incorporar otros instrumentos quirúrgicos auxiliares opcionales (18) , como unidades electroquirúrgicas (ESU) e insufladores. Y, a partir de dicha configuración ya conocida, el dispositivo para navegación 3D integrado en un robot quirúrgico (1) de la invención se distingue por comprender además un dispositivo para navegación 3D (19) , más específicamente para navegación de modelos de planificación ridimensionales de la estructura o estructuras anatómicas del paciente a intervenir, obtenidos previamente a partir de imágenes médicas del paciente tales como TAC, RMN, PET o combinación de ellas, el cual dispositivo (19) se encuentra integrado en la propia consola (2) de manejo del robot (1) , de modo que forma parte adicional de la misma, y donde dicho dispositivo (19) cuenta, al menos, con una interfaz (20) de usuario que se encuentra incorporada junto a la carcasa (6) del visor (4) de la consola (2) siendo fácilmente accesible para que el cirujano que maneja dicha consola (2) pueda manipular dicha interfaz (20) sin moverse de la silla (3) de la consola (2) , y donde el procesador de dicho dispositivo (19) está conectado a la unidad de procesamiento central (16) del robot (1) con un software apto para que la imagen del modelo en 3D (I) se replique en la pantalla (5) del visor (4) de la consola (2) en paralelo o no con otra información y/o con la imagen que capta el endoscopio (9) de la zona de intervención. En la figura 4 se ha representado esquemáticamente dicha pantalla (5) del visor (4) con los dos tipos de imágenes mostradas simultáneamente. Atendiendo a las figuras 2 y 3, se observa cómo, en una forma de realización preferida de la invención, la interfaz (20) del dispositivo para navegación 3D (19) es una pantalla táctil. No obstante, en otras formas de realización no representadas, la interfaz (20) puede consistir en una botonera, en un joystick o en algún otro instrumento similar. Por otra parte, de preferencia, la interfaz (20) del dispositivo (19) está incorporada a la consola (2) mediante un soporte regulable (21) que permite posicionarla según convenga al cirujano en cada caso. De preferencia, dicho soporte regulable (21) , es un brazo articulado, que se acopla a un lateral de la carcasa (5) del visor (4) . De preferencia, dicho brazo articulado (21) se acopla, a través de un anclaje (22) deslizable, a una guía (23) prevista horizontalmente junto a la carcasa (5) , tal que el conjunto se puede desplazar en cualquiera de los tres ejes de espacio en un amplio radio de traslación. De preferencia, el anclaje (22) es fácilmente desmontable para poder incorporar o no el brazo (21) con el dispositivo (19) al robot (1) , según las necesidades de cada caso o para facilitar su sustitución y almacenaje. En cualquier caso, de preferencia, el dispositivo para navegación 3D integrado en un robot quirúrgico puede ser controlado mediante comandos de voz. Descrita suficientemente la naturaleza de la presente invención, así como la manera de ponerla en práctica, no se considera necesario hacer más extensa su explicación para que cualquier experto en la materia comprenda su alcance y las ventajas que de ella se derivan.
Publicaciones:
ES2963243 (25/03/2024) - A1 Solicitud de patente con informe sobre el estado de la técnica
Eventos:
En fecha 26/08/2022 se realizó Registro Instancia de Solicitud
En fecha 26/08/2022 se realizó Admisión a Trámite
En fecha 26/08/2022 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 29/08/2022 se realizó Superado examen de oficio
En fecha 01/12/2023 se realizó Realizado IET
En fecha 07/12/2023 se realizó 1109P_Comunicación Traslado del IET
En fecha 25/03/2024 se realizó Publicación Solicitud
En fecha 25/03/2024 se realizó Publicación Folleto Solicitud con IET (A1)
Pagos:
25/08/2022 - Pago Tasas IET
Fuente de la información
Parte de la información aquí publicada es pública puesto que ha sido obtenida de la Oficina de Propiedad Industrial de los diferentes países el 10/05/2024 y por lo tanto puede ser que la información no esté actualizada.Parte de la información aquí mostrada ha sido calculada por nuestro sistema informático y puede no ser veraz.
Privacidad
Si considera que al información aquí publicada afecta a su privacidad y desea que eliminemos la información aquí publicada envíe un email a info@patentes-y-marcas.com o rellene el formulario que encontrará aquí.Información sobre el registro de patente nacional por DISPOSITIVO PARA NAVEGACIÓN 3D INTEGRADO EN UN ROBOT QUIRÚRGICO con el número P202230768
El registro de patente nacional por DISPOSITIVO PARA NAVEGACIÓN 3D INTEGRADO EN UN ROBOT QUIRÚRGICO con el número P202230768 fue solicitada el 26/08/2022. Se trata de un registro en España por lo que este registro no ofrece protección en el resto de países. El registro DISPOSITIVO PARA NAVEGACIÓN 3D INTEGRADO EN UN ROBOT QUIRÚRGICO con el número P202230768 fue solicitada por CELLA MEDICAL SOLUTIONS S.L. mediante los servicios del agente MARIA DESAMPARADOS DIAZ PACHECO. El registro [modality] por DISPOSITIVO PARA NAVEGACIÓN 3D INTEGRADO EN UN ROBOT QUIRÚRGICO con el número P202230768 está clasificado como A61B 34/37 según la clasificación internacional de patentes.
Otras invenciones solicitadas por CELLA MEDICAL SOLUTIONS S.L.
Es posible conocer todas las invenciones solicitadas por CELLA MEDICAL SOLUTIONS S.L. entre las que se encuentra el registro de patente nacional por DISPOSITIVO PARA NAVEGACIÓN 3D INTEGRADO EN UN ROBOT QUIRÚRGICO con el número P202230768. Si se desean conocer más invenciones solicitadas por CELLA MEDICAL SOLUTIONS S.L. clicar aquí.Otras invenciones solicitadas en la clasificación internacional de patentes A61B 34/37.
Es posible conocer invenciones similares al campo de la técnica se refiere. El registro de patente nacional por DISPOSITIVO PARA NAVEGACIÓN 3D INTEGRADO EN UN ROBOT QUIRÚRGICO con el número P202230768 está clasificado con la clasificación A61B 34/37 por lo que si se desea conocer más registros con la clasificación A61B 34/37 clicar aquí.Otras invenciones solicitadas a través del representante MARIA DESAMPARADOS DIAZ PACHECO
Es posible conocer todas las invenciones solicitadas a través del agente MARIA DESAMPARADOS DIAZ PACHECO entre las que se encuentra el registro patente nacional por DISPOSITIVO PARA NAVEGACIÓN 3D INTEGRADO EN UN ROBOT QUIRÚRGICO con el número P202230768. Si se desean conocer más invenciones solicitadas a través del agente MARIA DESAMPARADOS DIAZ PACHECO clicar aquí.Patentes en España
Es posible conocer todas las invenciones publicadas en España entre las que se encuentra el registro patente nacional por DISPOSITIVO PARA NAVEGACIÓN 3D INTEGRADO EN UN ROBOT QUIRÚRGICO. Nuestro portal www.patentes-y-marcas.com ofrece acceso a las publicaciones de patentes en España. Conocer las patentes registradas en un país es importante para saber las posibilidades de fabricar, vender o explotar una invención en España.Patentes registradas en la clase A
Es posible conocer todas las patentes registradas en la clase A (NECESIDADES CORRIENTES DE LA VIDA) entre las que se encuentra la patente DISPOSITIVO PARA NAVEGACIÓN 3D INTEGRADO EN UN ROBOT QUIRÚRGICO con el número P202230768. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase A61
Es posible conocer todas las patentes registradas en la clase A61 (CIENCIAS MEDICAS O VETERINARIAS; HIGIENE) entre las que se encuentra la patente DISPOSITIVO PARA NAVEGACIÓN 3D INTEGRADO EN UN ROBOT QUIRÚRGICO con el número P202230768. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase A61B
Es posible conocer todas las patentes registradas en la clase A61B (DIAGNOSTICO; CIRUGIA; IDENTIFICACION) entre las que se encuentra la patente DISPOSITIVO PARA NAVEGACIÓN 3D INTEGRADO EN UN ROBOT QUIRÚRGICO con el número P202230768. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.
¿Tienes alguna duda?
Escribe tu consulta y te responderemos rápida y gratuitamente.

Otras patentes similares
 P202230765
P202230765 P202230766
P202230766
 P202230772
P202230772Profesionales Recomendados
Barcelona
933182440
España
933182440
España

Barcelona
+34 93 362 16 97
España
+34 93 362 16 97
España

Barcelona
932 593 600
España
932 593 600
España







