


- Home /
- Publicaciones de patentes /
- DISPOSITIVO DE SIMULACIÓN APTO PARA SU USO EN ENTORNOS DE REALIDAD AUMENTADA O REALIDAD VIRTUAL
Patente nacional por "DISPOSITIVO DE SIMULACIÓN APTO PARA SU USO EN ENTORNOS DE REALIDAD AUMENTADA O REALIDAD VIRTUAL"
Este registro ha sido solicitado por
SEABERY SOLUCIONES, S.L.
a través del representanteNICOLÁS ESCUDERO PRIETO
Contacto
- Estado: Vigente
- País:
- España
- Fecha solicitud:
- 18/02/2021
- Número solicitud:
-
P202130127
- Número publicación:
-
ES2921524
- Fecha de concesión:
-
01/09/2023
- Inventores:
-
Persona física
- Datos del titular:
-
SEABERY SOLUCIONES, S.L.
- Datos del representante:
-
Nicolás ESCUDERO PRIETO
- Clasificación Internacional de Patentes:
- G09B 9/00
- Clasificación Internacional de Patentes de la publicación:
- G09B 9/00
- Fecha de vencimiento:
Quiero registrar una patente

Reivindicaciones:
+ ES-2921524_A11. Dispositivo de simulación, apto para su uso en entornos de realidad aumentada y/o virtual, que comprende: - una varilla (1) ; - medios de localización espacial, dispuestos en la varilla (1) , adaptados para su reconocimiento por unos primeros medios (4) ópticos de adquisición, para determinar la posición y orientación de la varilla (1) en el entorno de realidad aumentada y/o virtual; y - un actuador (2) táctil dispuesto en la varilla (1) , estando dicho dispositivo caracterizado por que el actuador (2) comprende medios de codificación del movimiento de, al menos, un dedo de la mano de un usuario de dicho dispositivo, en una dirección sustancialmente longitudinal a lo largo de la varilla (1) . 2. Dispositivo según la reivindicación anterior, donde los medios de localización espacial de la varilla (1) comprende uno o más de los siguientes elementos de identificación: marcadores (3) dispuestos en la varilla, y codificados con información óptica, apta para su reconocimiento por unos primeros medios (4) ópticos de adquisición; unos segundos medios (8) ópticos de adquisición de imagen alojados en el interior o anexos a la varilla (1) ; sensores electromagnéticos y/o sensores de infrarrojo. 3. Dispositivo según cualquiera de las reivindicaciones anteriores, donde el actuador (2) táctil está unido solidariamente a la varilla (1) y comprende un sensor (10) de contacto. 4. Dispositivo según las reivindicaciones 1-2, donde el actuador (2) comprende un elemento (5) desplazable respecto a la varilla (1) . 5. Dispositivo según la reivindicación anterior, que comprende adicionalmente un elemento (7) de retroceso conectado a un elemento (5) desplazable, adaptado para situar el elemento (5) desplazable en una posición de referencia a lo largo de la varilla (1) . 6. Dispositivo según la reivindicación anterior, donde la varilla (1) comprende un tope (9) que define la posición de referencia a lo largo de la varilla (1) . 7. Dispositivo según cualquiera de las reivindicaciones 5-6, donde el elemento (7) de retroceso se encuentra conectado a la varilla (1) y al elemento (5) desplazable. 8. Dispositivo según cualquiera de las reivindicaciones 5-7, donde el elemento (7) de retroceso comprende un muelle o un elemento elástico. 9. Dispositivo según cualquiera de las reivindicaciones 4-8, donde los medios de codificación están conectados al elemento (5) desplazable. 10. Dispositivo según las reivindicaciones 4-9, donde el elemento (5) desplazable comprende adicionalmente unas guías para su desplazamiento a lo largo de la varilla (1) . 11. Dispositivo según cualquiera de las reivindicaciones 5-8, donde los medios de codificación están conectados al elemento (5) desplazable y/o al elemento (7) de retroceso. 12. Dispositivo según cualquiera de las reivindicaciones anteriores, que comprende medios de procesamiento (6) y/o medios de transmisión (11) de información de codificación generada por el actuador (2) táctil. 13. Dispositivo según cualquiera de las reivindicaciones anteriores, donde el actuador (2) táctil comprende al menos uno de los siguientes elementos: una placa de circuito impreso flexible, un potenciómetro lineal o angular, un sensor capacitivo o resistivo, un sensor de efecto Hall o un codificador rotatorio. 14. Sistema de realidad aumentada y/o virtual, que comprende: - un dispositivo según cualquiera de las reivindicaciones anteriores; - un simulador representando un entorno de realidad aumentada y/o virtual; - unos primeros medios (4) ópticos de adquisición de imagen; - opcionalmente, unos segundos medios (8) ópticos de adquisición de imagen; - medios de visualización configurados para representar la interacción del usuario con el entorno de realidad aumentada y/o virtual a partir de las imágenes adquiridas por los primeros medios (4) ópticos, opcionalmente por los segundos medios (8) ópticos, y/o por la información de la interacción proporcionada por el actuador (2) ; - una unidad de almacenamiento y/o procesamiento de información, que comprende medios software/hardware configurados para registrar, procesar o transmitir en tiempo real la información proporcionada por el actuador (2) a los medios de visualización. 15. Procedimiento de interacción de un usuario con un entorno de realidad aumentada y/o virtual mediante un dispositivo según las reivindicaciones 1-14 o mediante el sistema según la reivindicación 15, caracterizado por que comprende la realización de un movimiento de pinza con dos dedos de la mano sobre la varilla (1) , desplazándolos en una dirección sustancialmente longitudinal a lo largo de la misma y activando para ello el actuador (2) con al menos uno de dichos dedos.
+ ES-2921524_B21. Dispositivo de simulación, apto para su uso en entornos de realidad aumentada y/o virtual, que comprende: - una varilla (1) ; - medios de localización espacial, dispuestos en la varilla (1) , adaptados para su reconocimiento por unos primeros medios (4) ópticos de adquisición, para determinar la posición y orientación de la varilla (1) en el entorno de realidad aumentada y/o virtual; y - un actuador (2) táctil dispuesto en la varilla (1) , estando dicho dispositivo caracterizado por que el actuador (2) comprende medios de codificación del movimiento de, al menos, un dedo de la mano de un usuario de dicho dispositivo, en una dirección sustancialmente longitudinal a lo largo de la varilla (1) . 2. Dispositivo según la reivindicación anterior, donde los medios de localización espacial de la varilla (1) comprende uno o más de los siguientes elementos de identificación: marcadores (3) dispuestos en la varilla, y codificados con información óptica, apta para su reconocimiento por unos primeros medios (4) ópticos de adquisición; unos segundos medios (8) ópticos de adquisición de imagen alojados en el interior o anexos a la varilla (1) ; sensores electromagnéticos y/o sensores de infrarrojo. 3. Dispositivo según cualquiera de las reivindicaciones anteriores, donde el actuador (2) táctil está unido solidariamente a la varilla (1) y comprende un sensor (10) de contacto. 4. Dispositivo según las reivindicaciones 1-2, donde el actuador (2) comprende un elemento (5) desplazable respecto a la varilla (1) . 5. Dispositivo según la reivindicación anterior, que comprende adicionalmente un elemento (7) de retroceso conectado a un elemento (5) desplazable, adaptado para situar el elemento (5) desplazable en una posición de referencia a lo largo de la varilla (1) . 6. Dispositivo según la reivindicación anterior, donde la varilla (1) comprende un tope (9) que define la posición de referencia a lo largo de la varilla (1) . 7. Dispositivo según cualquiera de las reivindicaciones 5-6, donde el elemento (7) de retroceso se encuentra conectado a la varilla (1) y al elemento (5) desplazable. 8. Dispositivo según cualquiera de las reivindicaciones 5-7, donde el elemento (7) de retroceso comprende un muelle o un elemento elástico. 9. Dispositivo según cualquiera de las reivindicaciones 4-8, donde los medios de codificación están conectados al elemento (5) desplazable. 10. Dispositivo según las reivindicaciones 4-9, donde el elemento (5) desplazable comprende adicionalmente unas guías para su desplazamiento a lo largo de la varilla (1) . 11. Dispositivo según cualquiera de las reivindicaciones 5-8, donde los medios de codificación están conectados al elemento (5) desplazable y/o al elemento (7) de retroceso. 12. Dispositivo según cualquiera de las reivindicaciones anteriores, que comprende medios de procesamiento (6) y/o medios de transmisión (11) de información de codificación generada por el actuador (2) táctil. 13. Dispositivo según cualquiera de las reivindicaciones anteriores, donde el actuador (2) táctil comprende al menos uno de los siguientes elementos: una placa de circuito impreso flexible, un potenciómetro lineal o angular, un sensor capacitivo o resistivo, un sensor de efecto Hall o un codificador rotatorio. 14. Sistema de realidad aumentada y/o virtual, que comprende: - un dispositivo según cualquiera de las reivindicaciones anteriores; - un simulador representando un entorno de realidad aumentada y/o virtual; - unos primeros medios (4) ópticos de adquisición de imagen; - opcionalmente, unos segundos medios (8) ópticos de adquisición de imagen; - medios de visualización configurados para representar la interacción del usuario con el entorno de realidad aumentada y/o virtual a partir de las imágenes adquiridas por los primeros medios (4) ópticos, opcionalmente por los segundos medios (8) ópticos, y/o por la información de la interacción proporcionada por el actuador (2) ; - una unidad de almacenamiento y/o procesamiento de información, que comprende medios software/hardware configurados para registrar, procesar o transmitir en tiempo real la información proporcionada por el actuador (2) a los medios de visualización. 15. Procedimiento de interacción de un usuario con un entorno de realidad aumentada y/o virtual mediante un dispositivo según las reivindicaciones 1-14 o mediante el sistema según la reivindicación 15, caracterizado por que comprende la realización de un movimiento de pinza con dos dedos de la mano sobre la varilla (1) , desplazándolos en una dirección sustancialmente longitudinal a lo largo de la misma y activando para ello el actuador (2) con al menos uno de dichos dedos.
Los productos y servicios protegidos por este registro son:
G09B 9/00
Descripciones:
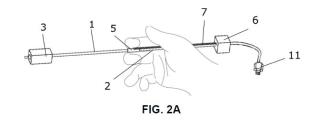
+ ES-2921524_A1 DISPOSITIVO DE SIMULACIÓN APTO PARA SU USO EN ENTORNOS DE REALIDAD AUMENTADA O REALIDAD VIRTUAL CAMPO DE LA INVENCIÓN La presente invención se enmarca en ámbito de las técnicas de simulación de la interacción entre uno o más objetos y un dispositivo (o herramienta) controlado por un usuario, en un entorno de realidad aumentada y/o virtual. Más concretamente, la invención se refiere a un dispositivo táctil que permite al usuario interactuar con un objeto simulando el aporte o extracción de material del mismo, de modo que es particularmente ventajoso en la simulación de operaciones y técnicas soldadura, así como para el aprendizaje o perfeccionamiento de las mismas. ESTADO DE LA TÉCNICA En la actualidad la formación de soldadores profesionales implica un gasto considerable de material (materiales de soldadura, piezas, etc.) , así como de la generación de emisiones y desechos con impacto medioambiental. Para solventar estos problemas, la patente española ES 2438440 B1 proporciona un dispositivo avanzado para la formación en soldadura, basado en realidad aumentada y que puede ser actualizado en remoto, permitiendo entrenar en todos los tipos de soldadura industrial convencionales. Además, la tecnología "Soldamatic", comercializada por Seaber y Augmented Technology SL, y las realizaciones de la patente estadounidense US 10460621 B2 implementan diferentes soluciones para la simulación mediante Realidad Aumentada (RA) de diversos ejercicios de soldadura, que permiten la formación y desarrollo de capacidades técnicas y profesionales, evitando este gasto económico y medioambiental. A pesar de las ventajas derivadas de la aplicación de la AR y de la realidad virtual (RV) en los procesos de entrenamiento de técnicas de soldadura, en el estado de la técnica no existe aún un accesorio que permita simular, con un alto de similitud, las operaciones de aporte de material de soldadura mediante varillas, principalmente en técnicas de soldadura TIG (abreviatura en inglés de "tungsten inert gas") o similares. En las aplicaciones conocidas, el ejercicio de soldadura se efectúa típicamente acercando o alejando la varilla (o "stick") de fibra de carbono (que replica la varilla de aporte TIG) a un bjetivo, si bien este movimiento no se corresponde totalmente con la realidad, haciendo que el grado de perfeccionamiento de estas técnicas en entornos de RA/RV sea limitado. Otro diseño propuesto para facilitar el movimiento de aporte de material en la simulación de soldadura se divulga en el documento de patente CN 111085757 A. Dicho documento describe un dispositivo de alimentación de hilo de soldadura para la soldadura de arco de argón TIG, que comprende un cuerpo similar a un bolígrafo (más conocido como TIG-PEN) de alimentación de hilo, una boquilla de cerámica, un tubo guía, un dispositivo de amortiguación anti-retorno y un segundo tubo guía. El cuerpo es una estructura hueca con agujero de montaje en el extremo. Por tanto, en el estado de la técnica no se han podido obtener dispositivos capaces de solucionar el problema de reproducir de manera precisa, durante simulaciones de operaciones de unión (soldadura, etc.) , el movimiento que realiza el usuario (por ejemplo, un soldador) . La presente invención proporciona una solución a dicha necesidad, mediante un dispositivo que permite simular el aporte de material de forma táctil en simulación de RA/RV para soldadura TIG u otras operaciones similares. El dispositivo desarrollado, como se verá más adelante, no está limitado únicamente a este uso en soldadura simulada en entornos de realidad aumentada y/o realidad virtual, sino que puede emplearse para otro tipo de operaciones simuladas donde sea necesario una solución ergonómica para la interacción del usuario con dichos entornos de RV/RA. DESCRIPCIÓN BREVE DE LA INVENCIÓN La presente invención se enmarca en los sistemas interacción de objetos con una herramienta en sistemas de realidad aumentada (RA) o realidad virtual (RV) y permite solventar las limitaciones del estado de la técnica mencionadas anteriormente. Este dispositivo, estrechamente relacionado con el campo tecnológico al que pertenecen la RA/RV, tiene como interés principal ayudar a los usuarios a la formación y aprendizaje de técnicas de soldadura manual. Ventajosamente, el dispositivo permite reproducir al usuario la práctica del movimiento que comúnmente se realiza con una varilla de aporte de soldadura TIG real, de manera simulada (en lugar de una mera aproximación o alejamiento de la varilla, como en otros sistemas conocidos, cuya proximidad a la situación real es más limitada) y segura para el usuario. El objeto principal de la invención presenta, como se verá, múltiples ventajas frente a los dispositivos de tipo TIG-PEN. Mientras que éste último desplaza de forma real la varilla a ravés del interior del soporte, el dispositivo reivindicado en esta solicitud permite realizar el mismo movimiento para aprender la técnica de soldadura, pero sin mover dicha varilla y por lo tanto sin llegar a "consumirla". Preferiblemente, el dispositivo simula un sensor de aporte de material en soldadura TIG. Este dispositivo es compatible con el equipo "Soldamatic" antes mencionado, así como con las realizaciones divulgadas en el documento de patente US 10460621 B2. Más concretamente, un primer objeto de la presente invención se refiere a un dispositivo o herramienta de simulación, apto para su uso en entornos de realidad aumentada y/o virtual (RA/RV) , que comprende al menos los siguientes elementos: una varilla (por ejemplo, de fibra de carbono) , medios de localización espacial, adaptados para su reconocimiento por unos primeros medios (4) ópticos de adquisición, para determinar la posición y orientación de la varilla en el entorno de realidad aumentada y/o virtual; y un actuador táctil o dactilar, también dispuesto sobre la varilla. El actuador táctil se ha de entender, en el ámbito de la invención, como cualquier tipo de actuador operable con los dedos, y que permite generar una entrada de información al dispositivo por medios electromecánicos y/o electrónicos, a partir del movimiento que el usuario realiza con dichos dedos. En realizaciones preferentes de la invención, los medios de localización espacial de la varilla comprende uno o más de los siguientes elementos de identificación: marcadores (naturales o artificiales) dispuestos en la varilla y que están codificados con información óptica, apta para su adquisición por unos primeros medios ópticos de adquisición (por ejemplo, dichos medios pueden comprender cámaras pasivas externas al dispositivo, o colocadas en una máscara de soldadura) ; unos segundos medios ópticos de adquisición de imagen alojados en el interior o anexos a la varilla; sensores electromagnéticos y/o sensores de infrarrojo (que permiten la obtención de la posición de la varilla por triangulación) . En ciertas realizaciones, los primeros medios ópticos de adquisición pueden comprender cámaras integradas en dispositivos inteligentes (teléfono móvil, tableta, etc.) . De esta manera, gracias a los medios de localización espacial, la varilla puede ser localizada (por ejemplo, obtener sus coordenadas en el espacio tridimensional, su orientación, etc.) en el entorno de realidad aumentada y/o virtual. Ventajosamente en el dispositivo de la invención, el actuador táctil comprende medios de codificación del movimiento ejercido, al menos, con uno de los dedos de la mano de un usuario de dicho dispositivo, en una dirección sustancialmente longitudinal a lo largo de la varilla. Dicho actuador genera una señal, ya sea analógica o digital en diferentes realizaciones de la invención, que representa dicho movimiento. Ventajosamente, esto permite la utilización del dispositivo de forma ergonómica y sencilla para el usuario. Además, cuando el dispositivo es empleado como una herramienta de interacción en un entorno de RA/RV, permite la realización de una gran variedad de operaciones (por ejemplo, aplicar o eliminar una cierta cantidad de material a un objeto dispuesto en el entorno RA/RV) con gran precisión. Los marcadores del dispositivo comprenden, preferentemente, marcadores artificiales tales como LEDs, códigos QR, códigos de barras, esferas retrorreflectivas, y/o marcadores impresos; así como marcadores naturales tales como puntos característicos del objeto y/o herramienta simulada (por ejemplo, las esquinas, huecos o contornos de los mismos en el cuerpo del dispositivo pueden ser empleados como puntos característicos) . En este sentido, se entenderá como "información codificada" a cualquier información óptica asociada o comprendida en el objeto, de forma natural o añadida al mismo, que pueda ser captada por los medios ópticos de adquisición, y analizada por la unidad de procesamiento. En una realización preferente del dispositivo, el actuador táctil del dispositivo está unido solidariamente a la varilla y comprende un sensor de contacto, ya sea un sensor táctil capacitivo, piezorresistivo, piezoeléctrico, o similar. De esta manera, el actuador táctil es solidario a la varilla en el momento del uso de la misma, pudiéndose ser un actuador integrado en la misma o externo. En ciertas realizaciones, el actuador se encuentra unido a la varilla de forma no permanente, pero de manera resistente (ya sea con uniones de clipado, grapas, atornillado, etc.) , propiciando una unión firme para la realización de las operaciones de soldadura simuladas. En una realización alternativa a la anterior, el actuador del dispositivo comprende un elemento desplazable respecto a la varilla. Preferentemente, en esta realización el dispositivo comprende adicionalmente un elemento de retroceso conectado al elemento desplazable, adaptado para situar el elemento desplazable en una posición de referencia a lo largo de la varilla. Este elemento de retroceso puede ser accionado fácilmente por el usuario y volver, cuando se suelta, a una posición de referencia cuando el usuario realiza na operación sobre el dispositivo con sus dedos. En algunas realizaciones aún más preferentes, la varilla comprende un tope que define la citada posición de referencia a lo largo de la misma. En ciertas realizaciones particulares, el elemento de retroceso se encuentra conectado a la varilla y al elemento desplazable. Ventajosamente, en ciertas realizaciones el elemento de retroceso comprende un muelle o un elemento elástico. En otras realizaciones ventajosas del dispositivo, los medios de codificación están conectados al elemento desplazable. Alternativamente, en otras realizaciones los medios de codificación están conectados al elemento desplazable y/o al elemento de retroceso. En ambos casos, el elemento desplazable puede comprender adicionalmente unas guías para su desplazamiento a lo largo de la varilla. En realizaciones preferentes del dispositivo, la varilla está fabricada de fibra de carbono. De esta manera, la varilla es muy ligera y resistente, lo que no supone añadir peso innecesario al dispositivo y aporta realismo y estabilidad al mismo. Además, así se reduce la dificultad de operación. En implementaciones alternativas se pueden utilizar otros materiales, tales como acero inoxidable o un polímero termoplástico, en función de la operación simulada. En algunas realizaciones particulares, el dispositivo comprende además medios de procesamiento y/o medios de transmisión de información de codificación generada por el actuador táctil. En una realización preferente del dispositivo, éste comprende unos segundos medios ópticos de adquisición de imagen alojados en el interior o anexos a la varilla. Ventajosamente, cuando el sistema comprende los segundos medios ópticos, dichos medios son cámaras que permiten localizar activamente el dispositivo de la invención, lo que hace que pueda localizarse activamente a sí misma (por ejemplo, realizando el seguimiento en la imagen de una serie de marcadores ópticos, ya sean naturales o artificiales) y con mayor precisión que con los primeros medios ópticos, que son externos al sistema. Por el contrario, los primeros medios ópticos de adquisición de información comprenden cámaras pasivas para detectar al dispositivo. De este modo, el sistema está especialmente optimizado para aquellas situaciones en las que se quiere simular el uso del dispositivo de la invención para interactuar sobre otro objeto. En una realización aún más preferente del dispositivo, los segundos medios ópticos de adquisición de imagen comprenden una cámara endoscópica. La ventaja de la cámara endoscópica es que es muy compacta y se amolda fácilmente a todo tipo de herramientas, particularmente aquellas con forma cilíndrica. En otras realizaciones preferentes, el dispositivo comprende otro tipo de cámaras miniaturizadas, preferiblemente de alta resolución (por ejemplo, con un sensor CCD o CMOS de 720/1080 píxeles de altura y/o anchura) . En realizaciones alternativas del dispositivo, este comprende adicionalmente, uno o más sensores no ópticos para mejorar su precisión y robustez; preferiblemente sensores inerciales, inclinómetros de tres ejes, hápticos, térmicos, mecánicos o electromagnéticos. Además, estos sensores adicionales permiten evaluar de forma cuantitativa la destreza (entendida como ángulo de inclinación, velocidad en la realización de una cierta operación, etc.) con la que el usuario maneja el dispositivo, e introducir información adicional en el entorno de realidad virtual/aumentada con el que interactúa el usuario. En algunas realizaciones del dispositivo, el actuador táctil comprende una placa de circuito impreso flexible, un potenciómetro lineal o angular, un sensor capacitivo o resistivo, un sensor de efector Hall o un codificador rotatorio. Los primeros medios ópticos adquieren imágenes de una determinada operación que el usuario realiza sobre un objeto, ya sea real (en cuyo caso estaríamos ante un sistema de realidad aumentada) o virtual (en tal caso, tendríamos un sistema de realidad virtual) . En una realización preferente de la invención, los primeros medios ópticos se encuentran alojados en una máscara de soldadura; mientras que el dispositivo (con o sin los segundos medios ópticos integrados) simula una antorcha de soldadura y/o los elementos de aporte de material. Dichos elementos de aporte de material comprenden preferiblemente varillas de soldadura o electrodos de soldadura. Además, el objeto comprende una pieza sobre la que se simula la aplicación de un consumible de soldadura En otras realizaciones de la invención, se combinan elementos y ventajas de varias de las distintas realizaciones preferentes referidas anteriormente. Un segundo objeto de la invención se refiere a un sistema de realidad aumentada y/o virtual, que comprende: - Un dispositivo según cualquiera de las realizaciones descritas anteriormente. - Un simulador representando un entorno de realidad aumentada y/o virtual. En dicho entorno el dispositivo de la invención simula una herramienta (por ejemplo, un electrodo de soldadura) que interactúa sobre un objeto. Por tanto, el simulador está configurado para localizar la pieza y la herramienta dentro del entorno. - Unos primeros medios ópticos de adquisición de imagen (cámaras pasivas, externas al dispositivo) . - Opcionalmente, unos segundos medios ópticos de adquisición de imagen (por ejemplo, las cámaras activas colocadas en el interior o anexas a la varilla del propio dispositivo) . - Medios de visualización (por ejemplo, cualquier pantalla LCD, OLED, etc.) configurados para representar la interacción del usuario con el entorno de realidad aumentada y/o virtual a partir de las imágenes adquiridas por los primeros medios ópticos, opcionalmente por los segundos medios ópticos, y/o por la información de la interacción proporcionada por el actuador. Estos medios de visualización también representan la posición y orientación de la varilla dentro del entorno de realidad aumentada /o virtual. - Una unidad de almacenamiento y/o procesamiento de información, que comprende medios software/hardware configurados para registrar, procesar o transmitir en tiempo real la información proporcionada por el actuador a los medios de visualización. Por ejemplo, la información que obtiene el actuador puede representar la cantidad de material depositado sobre un objeto en el entorno RA/RV. Los medios software/hardware comprenden unidades de procesamiento por computador (CPU) , unidades de procesamiento gráfico (GPU) , medios de almacenamiento den la nube, etc. Dichos medios están configurados para captar la información del actuador, digitalizarla si es preciso y enviarla a través de una red (local o internet) a dispositivos remotos de representación de la información (pantallas, etc.) . En ciertas realizaciones del sistema de la invención, éste comprende más de un dispositivo de simulación según lo descrito anteriormente. En dichas realizaciones, el sistema comprende medios de identificación unívoca de cada uno de los dispositivos, permitiendo que varios dispositivos de simulación de acuerdo a la presente invención puedan interactuar en el mismo entorno de realidad aumentada y/o virtual. También forma parte de la invención el procedimiento para operar el dispositivo descrito con anterioridad, de tal manera que un usuario interactúa con un entorno de realidad aumentada y/o virtual mediante dicho dispositivo. De manera característica, el rocedimiento comprende la realización de un movimiento de pinza con dos dedos de la mano sobre la varilla, desplazándolos en una dirección sustancialmente longitudinal a lo largo de la misma y activando para ello el actuador con al menos uno de dichos dedos. En general, el dispositivo, método y el sistema descritos con anterioridad son apropiados para su uso en la representación de entornos de realidad aumentada y/o virtual en simulaciones de técnicas de aporte y/o extracción de material de soldadura, pintura industrial y/o procedimientos quirúrgicos y/u odontológicos. Un uso preferente de esta invención son los simuladores de RA/RV en los que sea necesario simular, de manera realista, la interacción entre el dispositivo descrito con anterioridad y un objeto (por ejemplo, cuando se simula un electrodo de soldadura) . Este tipo de simuladores son especialmente útiles en el ámbito académico ya que permiten practicar y aprender procesos que requieren habilidades manuales con las correspondientes ventajas de RA/RV (tales como el ahorro de material, permitir prácticas ilimitadas, gamificación del proceso de aprendizaje, habilita un entorno seguro para el aprendizaje sin riesgo de quemaduras para el usuario, etc.) . Ventajosamente, el dispositivo puede simular la aplicación del consumible de soldadura y cómo un determinado volumen de material es aportado o transferido al objeto. De tal manera, el actuador táctil será elegido para que tenga suficiente sensibilidad, según la requerida por el proceso de soldadura concreto que se simule. Particularmente, el dispositivo de la invención se puede utilizar en simulaciones de técnicas de aporte y/o extracción de material de soldadura, donde el dispositivo de simulación simula el comportamiento de una varilla de aporte para soldadura TIG (abreviatura en inglés para "tungsten inert gas") . Ventajosamente, la interacción con el sensor táctil emula de manera fidedigna el movimiento que realizaría el soldador durante una soldadura real, de acuerdo al movimiento de pinza ejercido por el usuario con al menos uno de los dedos, tal y como se ha descrito con anterioridad. A lo largo de la descripción y las reivindicaciones la palabra "comprende" y sus variantes no pretenden excluir otras características técnicas, aditivos, componentes o pasos. Para los expertos en la materia, otros objetos, ventajas y características de la invención se desprenderán en parte de la descripción y en parte de la práctica de la invención. Además, en el ámbito de la invención cuando se hace referencia a medios "ópticos" no se pretende limitar al espectro electromagnético "visible", sino que cualquier porción del ismo puede ser utilizada (ultravioleta, infrarrojos, etc.) . Asimismo, se entenderá el concepto de "información óptica" como cualquier elemento que comprenda información codificada que pueda leerse o adquirirse mediante medios de reconocimiento ópticos. Dicha información óptica podrá, por tanto, estar codificada en una pluralidad de soportes físicos (entre ellos los códigos QR, LEDs, imágenes, caracteres, códigos de barras, esferas retrorreflectivas, marcadores impresos, etc.) siempre que su reconocimiento o lectura pueda realizarse por medios ópticos (por ejemplo, una cámara) . Por otro lado, cuando se refiera una "cámara" dicha nomenclatura no es limitativa, de manera que sería equivalente a cualquier dispositivo capaz de adquirir información en forma de imagen y/o vídeo. Finalmente, cuando se emplea el término "sustancialmente" se hace referencia a un ángulo con un margen de tolerancia de ± 10 grados. BREVE DESCRIPCIÓN DE LAS FIGURAS A continuación, se presenta una descripción breve de cada una de las figuras usadas para complementar la descripción de la invención que sigue. Dichas figuras se relacionan con el estado de la técnica o con realizaciones preferentes de la invención, que se presentan como ejemplos no limitativos de la misma. La Figura 1 ilustra una realización particular de la invención, de aquí en adelante referida como realización A, en la que el actuador táctil es operado con un movimiento de pinzamiento para emular el movimiento realizado por el soldador durante una soldadura TIG. Las Figuras 2A-2J muestran imágenes de los diferentes movimientos de mano realizados por el usuario (por ejemplo, un soldador) para operar el dispositivo de la realización A. Concretamente, las Figuras 2A-2B se corresponden a un primer movimiento de pinzamiento, las Figuras 2C-2D a un segundo movimiento de pinzamiento, las Figuras 2E-2F a un tercer movimiento de pinzamiento, las Figuras 2G-2H a un cuarto movimiento de pinzamiento y las Figuras 2I-2J a un quinto movimiento de pinzamiento. Estos movimientos preferidos son particularmente útiles en simulación de soldadura, correspondiéndose los mismos con movimientos realizados en operaciones de soldadura real. Las Figuras 3A-3B corresponden a otra variante de la realización A, respectivamente en posición extendida y comprimida, donde el elemento de retroceso comprende un lemento elástico o muelle cuya compresión es utilizada para codificar el desplazamiento de la varilla telescópica. La Figura 4 representa otra realización particular de la invención, de aquí en adelante referida como realización B, en la que el actuador táctil es operado por el usuario deslizando uno o más dedos sobre el mismo. Las Figuras 5A-5B ilustran el movimiento de mano realizado por el soldador para operar el dispositivo de la realización B, y que consiste preferiblemente en un deslizamiento de un dedo sobre las zonas táctiles del actuador. La Figura 6 muestra una vista superior (a la izquierda) y una vista inferior (a la derecha) de una placa de circuito impreso (PCB) que forma parte del actuador táctil de la realización B descrita en los párrafos anteriores. Dicha PCB comprende una zona táctil y caja de componentes electrónicos. La Figura 7 muestra una vista posterior de la realización B, donde se ven las guías para acoplar el actuador táctil a la varilla. La Figura 8 representa una vista del sistema completo para una aplicación de simulación de soldadura en un entorno de realidad aumentada o virtual. Descripción de las referencias numéricas de las Figuras: DESCRIPCIÓN DETALLADA DE LA INVENCIÓN Como se ha descrito en apartados anteriores, y tal como se representa en las Figuras 1 8, un objeto principal de la invención se refiere a un dispositivo de simulación, apto para su uso en entornos de realidad aumentada y/o virtual, que comprende: - una varilla (1) ; - medios de localización espacial para determinar la posición y orientación de la varilla (1) en el entorno de realidad aumentada y/o virtual; y - un actuador (2) táctil dispuesto en la varilla (1) , donde el actuador (2) táctil comprende medios de codificación del movimiento de, al menos, un dedo de la mano de un usuario de dicho dispositivo, en una dirección sustancialmente longitudinal a lo largo de la varilla (1) . En realizaciones particulares, los medios de localización espacial comprenden uno o más marcadores (3) dispuestos en la varilla (1) están preferentemente codificados con información óptica, apta para su adquisición por unos primeros medios (4) ópticos de adquisición (por ejemplo, dichos medios pueden comprender cámaras pasivas externas al dispositivo) . Asimismo, el actuador (2) táctil se ha de entender, en el ámbito de la invención, como cualquier tipo de actuador operable con los dedos, y que permite generar una entrada de información al dispositivo por medios electromecánicos y/o electrónicos, a partir del movimiento que el usuario realiza con dichos dedos. Como realizaciones particulares, en modo alguno limitativas del alcance de las reivindicaciones, se describen a continuación dos ejemplos de posibles implementaciones del dispositivo de la invención. En concreto, ambas se refieren a dispositivos para su uso en soldadura TIG. Realización A Esta realización preferente de la presente invención, representada en la Figura 1, recoge electromecánicamente el movimiento de las técnicas de aporte de varilla (1) TIG usada por soldadores. Dichos movimientos se basan en el pinzamiento con los dedos de la varilla (1) TIG para desplazarla linealmente, como se ilustra en las Figuras 2A-2J. Concretamente, dichas Figuras 2A-2J comprenden movimientos de pinzamiento preferentes para operar la realización A para simular el aporte de material de soldadura. En el caso de esta invención, el usuario pinzará el elemento (5) desplazable del actuador táctil (2) , que se moverá linealmente. Ventajosamente, el movimiento lineal del elemento (5) desplazable se realizará a lo largo de la varilla (1) , que permanecerá estática, y será detectado y medido por unos medios (6) de procesamiento, en particular, un sistema electromecánico de medición lineal. El desplazamiento se traducirá en una transferencia de material proporcional al desplazamiento mediante simulación con Realidad Aumentada para soldadura TIG. Además, para que el usuario pueda repetir el gesto múltiples veces, el dispositivo de la invención incorpora un elemento (7) de retroceso que cuando el usuario suelte el elemento (5) desplazable, éste vuelva a su posición inicial preparándolo para una nueva medición. La varilla (1) es una parte rígida y estática del sensor de aporte de material TIG. La principal función de este elemento, además de servir como punto de agarre para el usuario, es servir de guía al movimiento lineal del elemento (5) desplazable. En esta realización, la varilla (1) tiene un diámetro máximo de 5 mm y es de longitud variable. La varilla (1) puede ser hueca o, alternativamente, maciza. Cuando es hueca, la varilla (1) puede alojar en su interior unos segundos medios (8) ópticos de adquisición de imagen. El elemento (5) desplazable es la parte del dispositivo que el usuario pinzará con sus dedos para hacer el gesto de aporte de material. El elemento (5) desplazable tiene un hueco gracias al cual podrá deslizarse a lo largo de la varilla (1) . Su forma más habitual es un tubo de 5 cm de longitud, si bien puede adoptar otras dimensiones para hacerlo más ergonómico al agarre con los dedos. El elemento (7) de retroceso se encarga de que el elemento (5) desplazable vuelva a su posición inicial una vez que el usuario haya terminado el gesto de aporte, es decir, cuando suelta el elemento (5) desplazable. Este elemento (7) de retroceso se conecta a la varilla (1) y al elemento (5) desplazable y puede ser un muelle o un elástico. Para segurar que el elemento (5) desplazable vuelva siempre al mismo punto inicial de referencia, se establece un tope (9) sobre la varilla (1) que define ese punto inicial. En esta realización, los medios (6) de procesamiento comprenden un sistema electromecánico de medición lineal encargado de medir el movimiento de gesto de aporte a través del elemento (5) desplazable y enviarlo a través de un protocolo de comunicación compatible con un computador como puede ser USB. La medición del movimiento (desplazamiento) de uno o más dedos del usuario se puede realizar a través del actuador (2) táctil, que comprende uno o varios sensores (10) de contacto que a su vez comprenden al menos uno de los siguientes elementos: un potenciómetro lineal o angular, un sensor linear capacitivo o resistivo, un sensor de efecto Hall (u otros sensores magnéticos) , o incluso un codificador rotatorio ("encoder") . Este sensor (10) de contacto se conecta al elemento (5) desplazable con un vástago, tensor o cable. Electrónicamente el sensor (10) de contacto se conecta a medios (6) de procesamiento, por ejemplo, un microcontrolador o CPU (en inglés, "Computer Processing Unit") que se encarga de traducir las señales eléctricas a información digital que envía a través de medios (11) de transmisión de información y un protocolo de comunicación hacia el simulador del entorno de RA/RV, donde se emplea dicha información como fuente de información para actualizar la simulación. Otra variante de esta realización se recoge en las Figuras 3A y 3B. donde el elemento de retroceso (7) comprende un muelle cuya compresión es utilizada para codificar el desplazamiento de la varilla (1) telescópica. En particular, la Figura 3A corresponde a la posición extendida (o posición de reposo) del muelle ubicado en la varilla (1) , mientras la Figura 3B corresponde a la posición comprimida de dicho muelle. Dicha compresión es medida por el actuador (2) táctil y es convertida en una lectura del desplazamiento efectuado por el usuario (lo que a su vez será codificada como un volumen de aporte de material) mediante alguno de los sensores (10) incorporados en el actuador táctil (2) , tal y como se ha descrito anteriormente. Realización B Esta realización se muestra en la Figura 4. El actuador (2) táctil de esta realización del dispositivo para soldadura TIG comprende una placa de circuito impreso (PCB, por sus siglas en inglés "Printed Circuit Board") flexible, concretamente una placa electrónica capacitiva, que comprende un sensor (10) de contacto que detecta el deslizamiento del edo del usuario sobre ella, y unos medios (6) de procesamiento que traduce dicho deslizamiento en aporte de un volumen de material simulado en el entorno de RV/RA. La PCB está colocada sobre un soporte ergonómico que permite anclarla a la varilla (1) . El usuario realiza un movimiento lineal sobre la propia placa en las zonas (12) táctiles (tal y como se muestra en las Figuras 5A y 5B, deslizando el dedo sobre dichas zonas (12) táctiles) , que permanecerá estática. El movimiento será detectado por un sensor (10) de contacto y será traducido por los medios (6) de procesamiento en un cierto aporte de material proporcional al desplazamiento registrado, para su utilización como entrada de información a una simulación con Realidad Aumentada para soldadura TIG. La PCB, de material flexible, se acoplará a un soporte mecánico que permita su anclaje a la varilla (1) de fibra de carbono que hasta ahora se utiliza para simular el ejercicio de soldadura, dotando de ergonomía y realismo a la solución. El sensor capacitivo propuesto se ubicará en un soporte montante para la varilla (1) que no tiene orificio de entrada determinado, puede colocarse en cualquiera de los dos sentidos de desplazamiento longitudinal a lo largo de la varilla (1) , lo que facilita la experiencia de usuario. En esta realización, el componente principal del actuador (2) táctil comprende una placa electrónica PCB de dos capas de material flexible, color negro y grosor de 0, 2 mm con dimensiones de 15 mm de ancho y 80 mm de largo, dispuestos de forma irregular. Tal y como se ilustra en la Figura 6, en la parte superior (zona ancha) de la PCB se encuentra una caja (13) , o carcasa, comprendiendo los componentes electrónicos (microcontrolador, resistencias, condensadores, regulador de tensión, etc.) . Por otro lado, en la parte inferior (zona estrecha, libre de componentes y enmarcada entre líneas blancas) se encuentra la parte de PCB expuesta al usuario, o zona (12) táctil, por dónde se desplazarán los dedos para simular el aporte de material. El principio de funcionamiento de esta placa electrónica consiste en la creación de dos zonas (12) táctiles o "pads" que, asociados a una pluralidad de condensadores, detectan de forma capacitiva la proximidad del dedo al circuito. Según la ubicación de la huella dactilar a lo largo de estas dos zonas (12) táctiles, el actuador (2) táctil capta información y, posteriormente, los medios (6) de procesamiento realizan la traducción de dicha información en forma de datos o señales que marcan la posición exacta del dedo. Esta PCB se alimenta, preferentemente, por medio de una fuente de tensión continua de bajo voltaje (por ejemplo, 5V) y transmitirá los datos de posición de los dedos a través de unos medios (11) de transmisión de información, que en este caso comprenden, a modo de ejemplo, un cable USB. Dicho cable irá, preferentemente, directamente soldado a la placa PCB para evitar su desconexión. Para realizar el montaje de la PCB se ha diseñado un soporte ergonómico que permite sostenerla y operarla de diversas formas (tal y como se muestra en las Figuras 5A-5B) , todas útiles en la soldadura real y adaptadas a las necesidades de cada usuario en función de su preferencia a la hora de realizar el aporte de material. Esta carcasa (13) cubrirá la PCB en su totalidad, a excepción de las zonas (12) táctiles rodeados por el marco blanco que indica la zona útil. El soporte permite montar la placa electrónica en él sin necesidad de atornillar, pegar o anclar de cualquier otra forma la misma. La zona (12) táctil se apoyará en una superficie curva que abraza a la varilla (1) cilindrica longitudinalmente y quedará sujeta por todo el perímetro gracias a unas guias (14) dispuestas en la carcasa. Una tapa cubrirá la caja (13) de los componentes electrónicos y fijará el cable USB ejerciendo presión sobre él. El proceso de fabricación y montaje se detalla a continuación. En primer lugar, se recibirá la placa PCB montada con todos sus componentes, a la que deberá soldarse el cable USB. Una vez unidos ambos, se introduce la PCB desde la zona superior hasta la inferior de la carcasa (13) , desplazando cuidadosamente la zona (12) táctil levemente flectada longitudinalmente por las guias (14) dispuestas para ello, tal y como se muestra en la Figura 7. Se cerrará el conjunto con una tapa que ha de pegarse a la carcasa. Finalmente, la varilla (1) se introduce por la zona trasera del dispositivo y será funcional. Adicionalmente, la varilla (1) comprende en su interior un hueco para la disposición de unos segundos medios (8) ópticos, en particular una cámara endoscópica. La Figura 8 corresponde a un ejemplo preferente de sistema de acuerdo a la invención, equipado para su uso en simulaciones de realidad virtual o aumentada y que comprende al menos un dispositivo de simulación según se ha descrito anteriormente. En este caso, una o más cámaras pasivas de los primeros medios ópticos (4) están colocadas en una máscara de soldadura (15) que lleva colocada el usuario para realizar una operación sobre una pieza (16) sobre la que se aplica una operación de soldadura simulada en un entorno de realidad virtual o aumentada. La máscara de soldadura (15) comprende medios de representación gráfica para la visualización del entorno virtual o de realidad umentada. El usuario realiza la operación simulada mediante el dispositivo de la invención según cualquiera de las realizaciones descritas anteriormente. En realizaciones alternativas, el sistema que comprende al menos un dispositivo de acuerdo a la presente invención puede ser empleado en cualquier entorno de realidad virtual o aumentada para simular una interacción (por ejemplo, adición de material) . Otras realizaciones preferentes Alternativamente, como alternativas técnicas podría sustituirse la comunicación USB por Bluetooth. Esto eliminaría el cable USB, pero aumentaría indudablemente el tamaño del accesorio y habría que incluir una batería capaz de alimentar el conjunto. Algunas realizaciones alternativas del dispositivo incluyen un elemento de sujeción (por ejemplo, una correa de velcro unida a la muñeca del usuario) por la que pase el cable USB, para evitar desestabilizar la varilla (1) o giros indeseados de la misma. Otras realizaciones de la invención son una variante de la realización A, comprendiendo adicionalmente una varilla (1) hueca para alojar los segundos medios (8) ópticos, por ejemplo, una cámara endoscópica. En realizaciones más avanzadas de la invención, los sensores no ópticos (inclinómetros, etc.) proporcionan información adicional (velocidad con la que se emplea el dispositivo, orientación, etc.) que permiten codificar en el entorno de RV/RA interacciones más complejas que el aporte o extracción de material. En realizaciones alternativas de la invención, el actuador táctil (4) y la varilla (1) están integrados. Por ejemplo, en tales realizaciones la placa de circuito impreso puede ser rígida o, preferiblemente, flexible y adaptable a la forma de la varilla (1) para ser dispuesta rodeando la misma.
+ ES-2921524_B2 DISPOSITIVO DE SIMULACIÓN APTO PARA SU USO EN ENTORNOS DE REALIDAD AUMENTADA O REALIDAD VIRTUAL CAMPO DE LA INVENCIÓN La presente invención se enmarca en ámbito de las técnicas de simulación de la interacción entre uno o más objetos y un dispositivo (o herramienta) controlado por un usuario, en un entorno de realidad aumentada y/o virtual. Más concretamente, la invención se refiere a un dispositivo táctil que permite al usuario interactuar con un objeto simulando el aporte o extracción de material del mismo, de modo que es particularmente ventajoso en la simulación de operaciones y técnicas soldadura, así como para el aprendizaje o perfeccionamiento de las mismas. ESTADO DE LA TÉCNICA En la actualidad la formación de soldadores profesionales implica un gasto considerable de material (materiales de soldadura, piezas, etc.) , así como de la generación de emisiones y desechos con impacto medioambiental. Para solventar estos problemas, la patente española ES 2438440 B1 proporciona un dispositivo avanzado para la formación en soldadura, basado en realidad aumentada y que puede ser actualizado en remoto, permitiendo entrenar en todos los tipos de soldadura industrial convencionales. Además, la tecnología "Soldamatic", comercializada por Seaber y Augmented Technology SL, y las realizaciones de la patente estadounidense US 10460621 B2 implementan diferentes soluciones para la simulación mediante Realidad Aumentada (RA) de diversos ejercicios de soldadura, que permiten la formación y desarrollo de capacidades técnicas y profesionales, evitando este gasto económico y medioambiental. A pesar de las ventajas derivadas de la aplicación de la AR y de la realidad virtual (RV) en los procesos de entrenamiento de técnicas de soldadura, en el estado de la técnica no existe aún un accesorio que permita simular, con un alto de similitud, las operaciones de aporte de material de soldadura mediante varillas, principalmente en técnicas de soldadura TIG (abreviatura en inglés de "tungsten inert gas") o similares. En las aplicaciones conocidas, el ejercicio de soldadura se efectúa típicamente acercando o alejando la varilla (o "stick") de fibra de carbono (que replica la varilla de aporte TIG) a un bjetivo, si bien este movimiento no se corresponde totalmente con la realidad, haciendo que el grado de perfeccionamiento de estas técnicas en entornos de RA/RV sea limitado. Otro diseño propuesto para facilitar el movimiento de aporte de material en la simulación de soldadura se divulga en el documento de patente CN 111085757 A. Dicho documento describe un dispositivo de alimentación de hilo de soldadura para la soldadura de arco de argón TIG, que comprende un cuerpo similar a un bolígrafo (más conocido como TIG-PEN) de alimentación de hilo, una boquilla de cerámica, un tubo guía, un dispositivo de amortiguación anti-retorno y un segundo tubo guía. El cuerpo es una estructura hueca con agujero de montaje en el extremo. Por tanto, en el estado de la técnica no se han podido obtener dispositivos capaces de solucionar el problema de reproducir de manera precisa, durante simulaciones de operaciones de unión (soldadura, etc.) , el movimiento que realiza el usuario (por ejemplo, un soldador) . La presente invención proporciona una solución a dicha necesidad, mediante un dispositivo que permite simular el aporte de material de forma táctil en simulación de RA/RV para soldadura TIG u otras operaciones similares. El dispositivo desarrollado, como se verá más adelante, no está limitado únicamente a este uso en soldadura simulada en entornos de realidad aumentada y/o realidad virtual, sino que puede emplearse para otro tipo de operaciones simuladas donde sea necesario una solución ergonómica para la interacción del usuario con dichos entornos de RV/RA. DESCRIPCIÓN BREVE DE LA INVENCIÓN La presente invención se enmarca en los sistemas interacción de objetos con una herramienta en sistemas de realidad aumentada (RA) o realidad virtual (RV) y permite solventar las limitaciones del estado de la técnica mencionadas anteriormente. Este dispositivo, estrechamente relacionado con el campo tecnológico al que pertenecen la RA/RV, tiene como interés principal ayudar a los usuarios a la formación y aprendizaje de técnicas de soldadura manual. Ventajosamente, el dispositivo permite reproducir al usuario la práctica del movimiento que comúnmente se realiza con una varilla de aporte de soldadura TIG real, de manera simulada (en lugar de una mera aproximación o alejamiento de la varilla, como en otros sistemas conocidos, cuya proximidad a la situación real es más limitada) y segura para el usuario. El objeto principal de la invención presenta, como se verá, múltiples ventajas frente a los dispositivos de tipo TIG-PEN. Mientras que éste último desplaza de forma real la varilla a ravés del interior del soporte, el dispositivo reivindicado en esta solicitud permite realizar el mismo movimiento para aprender la técnica de soldadura, pero sin mover dicha varilla y por lo tanto sin llegar a "consumirla". Preferiblemente, el dispositivo simula un sensor de aporte de material en soldadura TIG. Este dispositivo es compatible con el equipo "Soldamatic" antes mencionado, así como con las realizaciones divulgadas en el documento de patente US 10460621 B2. Más concretamente, un primer objeto de la presente invención se refiere a un dispositivo o herramienta de simulación, apto para su uso en entornos de realidad aumentada y/o virtual (RA/RV) , que comprende al menos los siguientes elementos: una varilla (por ejemplo, de fibra de carbono) , medios de localización espacial, adaptados para su reconocimiento por unos primeros medios (4) ópticos de adquisición, para determinar la posición y orientación de la varilla en el entorno de realidad aumentada y/o virtual; y un actuador táctil o dactilar, también dispuesto sobre la varilla. El actuador táctil se ha de entender, en el ámbito de la invención, como cualquier tipo de actuador operable con los dedos, y que permite generar una entrada de información al dispositivo por medios electromecánicos y/o electrónicos, a partir del movimiento que el usuario realiza con dichos dedos. En realizaciones preferentes de la invención, los medios de localización espacial de la varilla comprende uno o más de los siguientes elementos de identificación: marcadores (naturales o artificiales) dispuestos en la varilla y que están codificados con información óptica, apta para su adquisición por unos primeros medios ópticos de adquisición (por ejemplo, dichos medios pueden comprender cámaras pasivas externas al dispositivo, o colocadas en una máscara de soldadura) ; unos segundos medios ópticos de adquisición de imagen alojados en el interior o anexos a la varilla; sensores electromagnéticos y/o sensores de infrarrojo (que permiten la obtención de la posición de la varilla por triangulación) . En ciertas realizaciones, los primeros medios ópticos de adquisición pueden comprender cámaras integradas en dispositivos inteligentes (teléfono móvil, tableta, etc.) . De esta manera, gracias a los medios de localización espacial, la varilla puede ser localizada (por ejemplo, obtener sus coordenadas en el espacio tridimensional, su orientación, etc.) en el entorno de realidad aumentada y/o virtual. Ventajosamente en el dispositivo de la invención, el actuador táctil comprende medios de codificación del movimiento ejercido, al menos, con uno de los dedos de la mano de un usuario de dicho dispositivo, en una dirección sustancialmente longitudinal a lo largo de la varilla. Dicho actuador genera una señal, ya sea analógica o digital en diferentes realizaciones de la invención, que representa dicho movimiento. Ventajosamente, esto permite la utilización del dispositivo de forma ergonómica y sencilla para el usuario. Además, cuando el dispositivo es empleado como una herramienta de interacción en un entorno de RA/RV, permite la realización de una gran variedad de operaciones (por ejemplo, aplicar o eliminar una cierta cantidad de material a un objeto dispuesto en el entorno RA/RV) con gran precisión. Los marcadores del dispositivo comprenden, preferentemente, marcadores artificiales tales como LEDs, códigos QR, códigos de barras, esferas retrorreflectivas, y/o marcadores impresos; así como marcadores naturales tales como puntos característicos del objeto y/o herramienta simulada (por ejemplo, las esquinas, huecos o contornos de los mismos en el cuerpo del dispositivo pueden ser empleados como puntos característicos) . En este sentido, se entenderá como "información codificada" a cualquier información óptica asociada o comprendida en el objeto, de forma natural o añadida al mismo, que pueda ser captada por los medios ópticos de adquisición, y analizada por la unidad de procesamiento. En una realización preferente del dispositivo, el actuador táctil del dispositivo está unido solidariamente a la varilla y comprende un sensor de contacto, ya sea un sensor táctil capacitivo, piezorresistivo, piezoeléctrico, o similar. De esta manera, el actuador táctil es solidario a la varilla en el momento del uso de la misma, pudiéndose ser un actuador integrado en la misma o externo. En ciertas realizaciones, el actuador se encuentra unido a la varilla de forma no permanente, pero de manera resistente (ya sea con uniones de clipado, grapas, atornillado, etc.) , propiciando una unión firme para la realización de las operaciones de soldadura simuladas. En una realización alternativa a la anterior, el actuador del dispositivo comprende un elemento desplazable respecto a la varilla. Preferentemente, en esta realización el dispositivo comprende adicionalmente un elemento de retroceso conectado al elemento desplazable, adaptado para situar el elemento desplazable en una posición de referencia a lo largo de la varilla. Este elemento de retroceso puede ser accionado fácilmente por el usuario y volver, cuando se suelta, a una posición de referencia cuando el usuario realiza na operación sobre el dispositivo con sus dedos. En algunas realizaciones aún más preferentes, la varilla comprende un tope que define la citada posición de referencia a lo largo de la misma. En ciertas realizaciones particulares, el elemento de retroceso se encuentra conectado a la varilla y al elemento desplazable. Ventajosamente, en ciertas realizaciones el elemento de retroceso comprende un muelle o un elemento elástico. En otras realizaciones ventajosas del dispositivo, los medios de codificación están conectados al elemento desplazable. Alternativamente, en otras realizaciones los medios de codificación están conectados al elemento desplazable y/o al elemento de retroceso. En ambos casos, el elemento desplazable puede comprender adicionalmente unas guías para su desplazamiento a lo largo de la varilla. En realizaciones preferentes del dispositivo, la varilla está fabricada de fibra de carbono. De esta manera, la varilla es muy ligera y resistente, lo que no supone añadir peso innecesario al dispositivo y aporta realismo y estabilidad al mismo. Además, así se reduce la dificultad de operación. En implementaciones alternativas se pueden utilizar otros materiales, tales como acero inoxidable o un polímero termoplástico, en función de la operación simulada. En algunas realizaciones particulares, el dispositivo comprende además medios de procesamiento y/o medios de transmisión de información de codificación generada por el actuador táctil. En una realización preferente del dispositivo, éste comprende unos segundos medios ópticos de adquisición de imagen alojados en el interior o anexos a la varilla. Ventajosamente, cuando el sistema comprende los segundos medios ópticos, dichos medios son cámaras que permiten localizar activamente el dispositivo de la invención, lo que hace que pueda localizarse activamente a sí misma (por ejemplo, realizando el seguimiento en la imagen de una serie de marcadores ópticos, ya sean naturales o artificiales) y con mayor precisión que con los primeros medios ópticos, que son externos al sistema. Por el contrario, los primeros medios ópticos de adquisición de información comprenden cámaras pasivas para detectar al dispositivo. De este modo, el sistema está especialmente optimizado para aquellas situaciones en las que se quiere simular el uso del dispositivo de la invención para interactuar sobre otro objeto. En una realización aún más preferente del dispositivo, los segundos medios ópticos de adquisición de imagen comprenden una cámara endoscópica. La ventaja de la cámara endoscópica es que es muy compacta y se amolda fácilmente a todo tipo de herramientas, particularmente aquellas con forma cilíndrica. En otras realizaciones preferentes, el dispositivo comprende otro tipo de cámaras miniaturizadas, preferiblemente de alta resolución (por ejemplo, con un sensor CCD o CMOS de 720/1080 píxeles de altura y/o anchura) . En realizaciones alternativas del dispositivo, este comprende adicionalmente, uno o más sensores no ópticos para mejorar su precisión y robustez; preferiblemente sensores inerciales, inclinómetros de tres ejes, hápticos, térmicos, mecánicos o electromagnéticos. Además, estos sensores adicionales permiten evaluar de forma cuantitativa la destreza (entendida como ángulo de inclinación, velocidad en la realización de una cierta operación, etc.) con la que el usuario maneja el dispositivo, e introducir información adicional en el entorno de realidad virtual/aumentada con el que interactúa el usuario. En algunas realizaciones del dispositivo, el actuador táctil comprende una placa de circuito impreso flexible, un potenciómetro lineal o angular, un sensor capacitivo o resistivo, un sensor de efector Hall o un codificador rotatorio. Los primeros medios ópticos adquieren imágenes de una determinada operación que el usuario realiza sobre un objeto, ya sea real (en cuyo caso estaríamos ante un sistema de realidad aumentada) o virtual (en tal caso, tendríamos un sistema de realidad virtual) . En una realización preferente de la invención, los primeros medios ópticos se encuentran alojados en una máscara de soldadura; mientras que el dispositivo (con o sin los segundos medios ópticos integrados) simula una antorcha de soldadura y/o los elementos de aporte de material. Dichos elementos de aporte de material comprenden preferiblemente varillas de soldadura o electrodos de soldadura. Además, el objeto comprende una pieza sobre la que se simula la aplicación de un consumible de soldadura En otras realizaciones de la invención, se combinan elementos y ventajas de varias de las distintas realizaciones preferentes referidas anteriormente. Un segundo objeto de la invención se refiere a un sistema de realidad aumentada y/o virtual, que comprende: - Un dispositivo según cualquiera de las realizaciones descritas anteriormente. - Un simulador representando un entorno de realidad aumentada y/o virtual. En dicho entorno el dispositivo de la invención simula una herramienta (por ejemplo, un electrodo de soldadura) que interactúa sobre un objeto. Por tanto, el simulador está configurado para localizar la pieza y la herramienta dentro del entorno. - Unos primeros medios ópticos de adquisición de imagen (cámaras pasivas, externas al dispositivo) . - Opcionalmente, unos segundos medios ópticos de adquisición de imagen (por ejemplo, las cámaras activas colocadas en el interior o anexas a la varilla del propio dispositivo) . - Medios de visualización (por ejemplo, cualquier pantalla LCD, OLED, etc.) configurados para representar la interacción del usuario con el entorno de realidad aumentada y/o virtual a partir de las imágenes adquiridas por los primeros medios ópticos, opcionalmente por los segundos medios ópticos, y/o por la información de la interacción proporcionada por el actuador. Estos medios de visualización también representan la posición y orientación de la varilla dentro del entorno de realidad aumentada /o virtual. - Una unidad de almacenamiento y/o procesamiento de información, que comprende medios software/hardware configurados para registrar, procesar o transmitir en tiempo real la información proporcionada por el actuador a los medios de visualización. Por ejemplo, la información que obtiene el actuador puede representar la cantidad de material depositado sobre un objeto en el entorno RA/RV. Los medios software/hardware comprenden unidades de procesamiento por computador (CPU) , unidades de procesamiento gráfico (GPU) , medios de almacenamiento den la nube, etc. Dichos medios están configurados para captar la información del actuador, digitalizarla si es preciso y enviarla a través de una red (local o internet) a dispositivos remotos de representación de la información (pantallas, etc.) . En ciertas realizaciones del sistema de la invención, éste comprende más de un dispositivo de simulación según lo descrito anteriormente. En dichas realizaciones, el sistema comprende medios de identificación unívoca de cada uno de los dispositivos, permitiendo que varios dispositivos de simulación de acuerdo a la presente invención puedan interactuar en el mismo entorno de realidad aumentada y/o virtual. También forma parte de la invención el procedimiento para operar el dispositivo descrito con anterioridad, de tal manera que un usuario interactúa con un entorno de realidad aumentada y/o virtual mediante dicho dispositivo. De manera característica, el rocedimiento comprende la realización de un movimiento de pinza con dos dedos de la mano sobre la varilla, desplazándolos en una dirección sustancialmente longitudinal a lo largo de la misma y activando para ello el actuador con al menos uno de dichos dedos. En general, el dispositivo, método y el sistema descritos con anterioridad son apropiados para su uso en la representación de entornos de realidad aumentada y/o virtual en simulaciones de técnicas de aporte y/o extracción de material de soldadura, pintura industrial y/o procedimientos quirúrgicos y/u odontológicos. Un uso preferente de esta invención son los simuladores de RA/RV en los que sea necesario simular, de manera realista, la interacción entre el dispositivo descrito con anterioridad y un objeto (por ejemplo, cuando se simula un electrodo de soldadura) . Este tipo de simuladores son especialmente útiles en el ámbito académico ya que permiten practicar y aprender procesos que requieren habilidades manuales con las correspondientes ventajas de RA/RV (tales como el ahorro de material, permitir prácticas ilimitadas, gamificación del proceso de aprendizaje, habilita un entorno seguro para el aprendizaje sin riesgo de quemaduras para el usuario, etc.) . Ventajosamente, el dispositivo puede simular la aplicación del consumible de soldadura y cómo un determinado volumen de material es aportado o transferido al objeto. De tal manera, el actuador táctil será elegido para que tenga suficiente sensibilidad, según la requerida por el proceso de soldadura concreto que se simule. Particularmente, el dispositivo de la invención se puede utilizar en simulaciones de técnicas de aporte y/o extracción de material de soldadura, donde el dispositivo de simulación simula el comportamiento de una varilla de aporte para soldadura TIG (abreviatura en inglés para "tungsten inert gas") . Ventajosamente, la interacción con el sensor táctil emula de manera fidedigna el movimiento que realizaría el soldador durante una soldadura real, de acuerdo al movimiento de pinza ejercido por el usuario con al menos uno de los dedos, tal y como se ha descrito con anterioridad. A lo largo de la descripción y las reivindicaciones la palabra "comprende" y sus variantes no pretenden excluir otras características técnicas, aditivos, componentes o pasos. Para los expertos en la materia, otros objetos, ventajas y características de la invención se desprenderán en parte de la descripción y en parte de la práctica de la invención. Además, en el ámbito de la invención cuando se hace referencia a medios "ópticos" no se pretende limitar al espectro electromagnético "visible", sino que cualquier porción del ismo puede ser utilizada (ultravioleta, infrarrojos, etc.) . Asimismo, se entenderá el concepto de "información óptica" como cualquier elemento que comprenda información codificada que pueda leerse o adquirirse mediante medios de reconocimiento ópticos. Dicha información óptica podrá, por tanto, estar codificada en una pluralidad de soportes físicos (entre ellos los códigos QR, LEDs, imágenes, caracteres, códigos de barras, esferas retrorreflectivas, marcadores impresos, etc.) siempre que su reconocimiento o lectura pueda realizarse por medios ópticos (por ejemplo, una cámara) . Por otro lado, cuando se refiera una "cámara" dicha nomenclatura no es limitativa, de manera que sería equivalente a cualquier dispositivo capaz de adquirir información en forma de imagen y/o vídeo. Finalmente, cuando se emplea el término "sustancialmente" se hace referencia a un ángulo con un margen de tolerancia de ± 10 grados. BREVE DESCRIPCIÓN DE LAS FIGURAS A continuación, se presenta una descripción breve de cada una de las figuras usadas para complementar la descripción de la invención que sigue. Dichas figuras se relacionan con el estado de la técnica o con realizaciones preferentes de la invención, que se presentan como ejemplos no limitativos de la misma. La Figura 1 ilustra una realización particular de la invención, de aquí en adelante referida como realización A, en la que el actuador táctil es operado con un movimiento de pinzamiento para emular el movimiento realizado por el soldador durante una soldadura TIG. Las Figuras 2A-2J muestran imágenes de los diferentes movimientos de mano realizados por el usuario (por ejemplo, un soldador) para operar el dispositivo de la realización A. Concretamente, las Figuras 2A-2B se corresponden a un primer movimiento de pinzamiento, las Figuras 2C-2D a un segundo movimiento de pinzamiento, las Figuras 2E-2F a un tercer movimiento de pinzamiento, las Figuras 2G-2H a un cuarto movimiento de pinzamiento y las Figuras 2I-2J a un quinto movimiento de pinzamiento. Estos movimientos preferidos son particularmente útiles en simulación de soldadura, correspondiéndose los mismos con movimientos realizados en operaciones de soldadura real. Las Figuras 3A-3B corresponden a otra variante de la realización A, respectivamente en posición extendida y comprimida, donde el elemento de retroceso comprende un lemento elástico o muelle cuya compresión es utilizada para codificar el desplazamiento de la varilla telescópica. La Figura 4 representa otra realización particular de la invención, de aquí en adelante referida como realización B, en la que el actuador táctil es operado por el usuario deslizando uno o más dedos sobre el mismo. Las Figuras 5A-5B ilustran el movimiento de mano realizado por el soldador para operar el dispositivo de la realización B, y que consiste preferiblemente en un deslizamiento de un dedo sobre las zonas táctiles del actuador. La Figura 6 muestra una vista superior (a la izquierda) y una vista inferior (a la derecha) de una placa de circuito impreso (PCB) que forma parte del actuador táctil de la realización B descrita en los párrafos anteriores. Dicha PCB comprende una zona táctil y caja de componentes electrónicos. La Figura 7 muestra una vista posterior de la realización B, donde se ven las guías para acoplar el actuador táctil a la varilla. La Figura 8 representa una vista del sistema completo para una aplicación de simulación de soldadura en un entorno de realidad aumentada o virtual. Descripción de las referencias numéricas de las Figuras: DESCRIPCIÓN DETALLADA DE LA INVENCIÓN Como se ha descrito en apartados anteriores, y tal como se representa en las Figuras 1 8, un objeto principal de la invención se refiere a un dispositivo de simulación, apto para su uso en entornos de realidad aumentada y/o virtual, que comprende: - una varilla (1) ; - medios de localización espacial para determinar la posición y orientación de la varilla (1) en el entorno de realidad aumentada y/o virtual; y - un actuador (2) táctil dispuesto en la varilla (1) , donde el actuador (2) táctil comprende medios de codificación del movimiento de, al menos, un dedo de la mano de un usuario de dicho dispositivo, en una dirección sustancialmente longitudinal a lo largo de la varilla (1) . En realizaciones particulares, los medios de localización espacial comprenden uno o más marcadores (3) dispuestos en la varilla (1) están preferentemente codificados con información óptica, apta para su adquisición por unos primeros medios (4) ópticos de adquisición (por ejemplo, dichos medios pueden comprender cámaras pasivas externas al dispositivo) . Asimismo, el actuador (2) táctil se ha de entender, en el ámbito de la invención, como cualquier tipo de actuador operable con los dedos, y que permite generar una entrada de información al dispositivo por medios electromecánicos y/o electrónicos, a partir del movimiento que el usuario realiza con dichos dedos. Como realizaciones particulares, en modo alguno limitativas del alcance de las reivindicaciones, se describen a continuación dos ejemplos de posibles implementaciones del dispositivo de la invención. En concreto, ambas se refieren a dispositivos para su uso en soldadura TIG. ea zac n Esta realización preferente de la presente invención, representada en la Figura 1, recoge electromecánicamente el movimiento de las técnicas de aporte de varilla (1) TIG usada por soldadores. Dichos movimientos se basan en el pinzamiento con los dedos de la varilla (1) TIG para desplazarla linealmente, como se ilustra en las Figuras 2A-2J. Concretamente, dichas Figuras 2A-2J comprenden movimientos de pinzamiento preferentes para operar la realización A para simular el aporte de material de soldadura. En el caso de esta invención, el usuario pinzará el elemento (5) desplazable del actuador táctil (2) , que se moverá linealmente. Ventajosamente, el movimiento lineal del elemento (5) desplazable se realizará a lo largo de la varilla (1) , que permanecerá estática, y será detectado y medido por unos medios (6) de procesamiento, en particular, un sistema electromecánico de medición lineal. El desplazamiento se traducirá en una transferencia de material proporcional al desplazamiento mediante simulación con Realidad Aumentada para soldadura TIG. Además, para que el usuario pueda repetir el gesto múltiples veces, el dispositivo de la invención incorpora un elemento (7) de retroceso que cuando el usuario suelte el elemento (5) desplazable, éste vuelva a su posición inicial preparándolo para una nueva medición. La varilla (1) es una parte rígida y estática del sensor de aporte de material TIG. La principal función de este elemento, además de servir como punto de agarre para el usuario, es servir de guía al movimiento lineal del elemento (5) desplazable. En esta realización, la varilla (1) tiene un diámetro máximo de 5 mm y es de longitud variable. La varilla (1) puede ser hueca o, alternativamente, maciza. Cuando es hueca, la varilla (1) puede alojar en su interior unos segundos medios (8) ópticos de adquisición de imagen. El elemento (5) desplazable es la parte del dispositivo que el usuario pinzará con sus dedos para hacer el gesto de aporte de material. El elemento (5) desplazable tiene un hueco gracias al cual podrá deslizarse a lo largo de la varilla (1) . Su forma más habitual es un tubo de 5 cm de longitud, si bien puede adoptar otras dimensiones para hacerlo más ergonómico al agarre con los dedos. El elemento (7) de retroceso se encarga de que el elemento (5) desplazable vuelva a su posición inicial una vez que el usuario haya terminado el gesto de aporte, es decir, cuando suelta el elemento (5) desplazable. Este elemento (7) de retroceso se conecta a la varilla (1) y al elemento (5) desplazable y puede ser un muelle o un elástico. Para segurar que el elemento (5) desplazable vuelva siempre al mismo punto inicial de referencia, se establece un tope (9) sobre la varilla (1) que define ese punto inicial. En esta realización, los medios (6) de procesamiento comprenden un sistema electromecánico de medición lineal encargado de medir el movimiento de gesto de aporte a través del elemento (5) desplazable y enviarlo a través de un protocolo de comunicación compatible con un computador como puede ser USB. La medición del movimiento (desplazamiento) de uno o más dedos del usuario se puede realizar a través del actuador (2) táctil, que comprende uno o varios sensores (10) de contacto que a su vez comprenden al menos uno de los siguientes elementos: un potenciómetro lineal o angular, un sensor linear capacitivo o resistivo, un sensor de efecto Hall (u otros sensores magnéticos) , o incluso un codificador rotatorio ("encoder") . Este sensor (10) de contacto se conecta al elemento (5) desplazable con un vástago, tensor o cable. Electrónicamente el sensor (10) de contacto se conecta a medios (6) de procesamiento, por ejemplo, un microcontrolador o CPU (en inglés, "Computer Processing Unit") que se encarga de traducir las señales eléctricas a información digital que envía a través de medios (11) de transmisión de información y un protocolo de comunicación hacia el simulador del entorno de RA/RV, donde se emplea dicha información como fuente de información para actualizar la simulación. Otra variante de esta realización se recoge en las Figuras 3A y 3B. donde el elemento de retroceso (7) comprende un muelle cuya compresión es utilizada para codificar el desplazamiento de la varilla (1) telescópica. En particular, la Figura 3A corresponde a la posición extendida (o posición de reposo) del muelle ubicado en la varilla (1) , mientras la Figura 3B corresponde a la posición comprimida de dicho muelle. Dicha compresión es medida por el actuador (2) táctil y es convertida en una lectura del desplazamiento efectuado por el usuario (lo que a su vez será codificada como un volumen de aporte de material) mediante alguno de los sensores (10) incorporados en el actuador táctil (2) , tal y como se ha descrito anteriormente. Realización B Esta realización se muestra en la Figura 4. El actuador (2) táctil de esta realización del dispositivo para soldadura TIG comprende una placa de circuito impreso (PCB, por sus siglas en inglés "Printed Circuit Board") flexible, concretamente una placa electrónica capacitiva, que comprende un sensor (10) de contacto que detecta el deslizamiento del edo del usuario sobre ella, y unos medios (6) de procesamiento que traduce dicho deslizamiento en aporte de un volumen de material simulado en el entorno de RV/RA. La PCB está colocada sobre un soporte ergonómico que permite anclarla a la varilla (1) . El usuario realiza un movimiento lineal sobre la propia placa en las zonas (12) táctiles (tal y como se muestra en las Figuras 5A y 5B, deslizando el dedo sobre dichas zonas (12) táctiles) , que permanecerá estática. El movimiento será detectado por un sensor (10) de contacto y será traducido por los medios (6) de procesamiento en un cierto aporte de material proporcional al desplazamiento registrado, para su utilización como entrada de información a una simulación con Realidad Aumentada para soldadura TIG. La PCB, de material flexible, se acoplará a un soporte mecánico que permita su anclaje a la varilla (1) de fibra de carbono que hasta ahora se utiliza para simular el ejercicio de soldadura, dotando de ergonomía y realismo a la solución. El sensor capacitivo propuesto se ubicará en un soporte montante para la varilla (1) que no tiene orificio de entrada determinado, puede colocarse en cualquiera de los dos sentidos de desplazamiento longitudinal a lo largo de la varilla (1) , lo que facilita la experiencia de usuario. En esta realización, el componente principal del actuador (2) táctil comprende una placa electrónica PCB de dos capas de material flexible, color negro y grosor de 0, 2 mm con dimensiones de 15 mm de ancho y 80 mm de largo, dispuestos de forma irregular. Tal y como se ilustra en la Figura 6, en la parte superior (zona ancha) de la PCB se encuentra una caja (13) , o carcasa, comprendiendo los componentes electrónicos (microcontrolador, resistencias, condensadores, regulador de tensión, etc.) . Por otro lado, en la parte inferior (zona estrecha, libre de componentes y enmarcada entre líneas blancas) se encuentra la parte de PCB expuesta al usuario, o zona (12) táctil, por dónde se desplazarán los dedos para simular el aporte de material. El principio de funcionamiento de esta placa electrónica consiste en la creación de dos zonas (12) táctiles o "pads" que, asociados a una pluralidad de condensadores, detectan de forma capacitiva la proximidad del dedo al circuito. Según la ubicación de la huella dactilar a lo largo de estas dos zonas (12) táctiles, el actuador (2) táctil capta información y, posteriormente, los medios (6) de procesamiento realizan la traducción de dicha información en forma de datos o señales que marcan la posición exacta del dedo. Esta PCB se alimenta, preferentemente, por medio de una fuente de tensión continua de bajo voltaje (por ejemplo, 5V) y transmitirá los datos de posición de los dedos a través de unos medios (11) de transmisión de información, que en este caso comprenden, a modo de ejemplo, un cable USB. Dicho cable irá, preferentemente, directamente soldado a la placa PCB para evitar su desconexión. Para realizar el montaje de la PCB se ha diseñado un soporte ergonómico que permite sostenerla y operarla de diversas formas (tal y como se muestra en las Figuras 5A-5B) , todas útiles en la soldadura real y adaptadas a las necesidades de cada usuario en función de su preferencia a la hora de realizar el aporte de material. Esta carcasa (13) cubrirá la PCB en su totalidad, a excepción de las zonas (12) táctiles rodeados por el marco blanco que indica la zona útil. El soporte permite montar la placa electrónica en él sin necesidad de atornillar, pegar o anclar de cualquier otra forma la misma. La zona (12) táctil se apoyará en una superficie curva que abraza a la varilla (1) cilindrica longitudinalmente y quedará sujeta por todo el perímetro gracias a unas guias (14) dispuestas en la carcasa. Una tapa cubrirá la caja (13) de los componentes electrónicos y fijará el cable USB ejerciendo presión sobre él. El proceso de fabricación y montaje se detalla a continuación. En primer lugar, se recibirá la placa PCB montada con todos sus componentes, a la que deberá soldarse el cable USB. Una vez unidos ambos, se introduce la PCB desde la zona superior hasta la inferior de la carcasa (13) , desplazando cuidadosamente la zona (12) táctil levemente flectada longitudinalmente por las guias (14) dispuestas para ello, tal y como se muestra en la Figura 7. Se cerrará el conjunto con una tapa que ha de pegarse a la carcasa. Finalmente, la varilla (1) se introduce por la zona trasera del dispositivo y será funcional. Adicionalmente, la varilla (1) comprende en su interior un hueco para la disposición de unos segundos medios (8) ópticos, en particular una cámara endoscópica. La Figura 8 corresponde a un ejemplo preferente de sistema de acuerdo a la invención, equipado para su uso en simulaciones de realidad virtual o aumentada y que comprende al menos un dispositivo de simulación según se ha descrito anteriormente. En este caso, una o más cámaras pasivas de los primeros medios ópticos (4) están colocadas en una máscara de soldadura (15) que lleva colocada el usuario para realizar una operación sobre una pieza (16) sobre la que se aplica una operación de soldadura simulada en un entorno de realidad virtual o aumentada. La máscara de soldadura (15) comprende medios de representación gráfica para la visualización del entorno virtual o de realidad umentada. El usuario realiza la operación simulada mediante el dispositivo de la invención según cualquiera de las realizaciones descritas anteriormente. En realizaciones alternativas, el sistema que comprende al menos un dispositivo de acuerdo a la presente invención puede ser empleado en cualquier entorno de realidad virtual o aumentada para simular una interacción (por ejemplo, adición de material) . Otras realizaciones preferentes Alternativamente, como alternativas técnicas podría sustituirse la comunicación USB por Bluetooth. Esto eliminaría el cable USB, pero aumentaría indudablemente el tamaño del accesorio y habría que incluir una batería capaz de alimentar el conjunto. Algunas realizaciones alternativas del dispositivo incluyen un elemento de sujeción (por ejemplo, una correa de velcro unida a la muñeca del usuario) por la que pase el cable USB, para evitar desestabilizar la varilla (1) o giros indeseados de la misma. Otras realizaciones de la invención son una variante de la realización A, comprendiendo adicionalmente una varilla (1) hueca para alojar los segundos medios (8) ópticos, por ejemplo, una cámara endoscópica. En realizaciones más avanzadas de la invención, los sensores no ópticos (inclinómetros, etc.) proporcionan información adicional (velocidad con la que se emplea el dispositivo, orientación, etc.) que permiten codificar en el entorno de RV/RA interacciones más complejas que el aporte o extracción de material. En realizaciones alternativas de la invención, el actuador táctil (4) y la varilla (1) están integrados. Por ejemplo, en tales realizaciones la placa de circuito impreso puede ser rígida o, preferiblemente, flexible y adaptable a la forma de la varilla (1) para ser dispuesta rodeando la misma.
Publicaciones:
ES2921524 (29/08/2022) - A1 Solicitud de patente con informe sobre el estado de la técnica
ES2921524 (08/09/2023) - B2 Patente de invención con examen
Eventos:
En fecha 18/02/2021 se realizó Registro Instancia de Solicitud
En fecha 18/02/2021 se realizó Admisión a Trámite
En fecha 18/02/2021 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 23/02/2021 se realizó Concesión solicitud de reducción de tasas
En fecha 23/02/2021 se realizó Superado examen de oficio
En fecha 01/03/2021 se realizó Publicación concesión reducción de tasas
En fecha 25/08/2021 se realizó Realizado IET
En fecha 31/08/2021 se realizó 1109P_Comunicación Traslado del IET
En fecha 10/02/2022 se realizó 3411X_Alta Mandatarios
En fecha 10/02/2022 se realizó Alta mandatario
En fecha 29/08/2022 se realizó Publicación Solicitud
En fecha 29/08/2022 se realizó Publicación Folleto Solicitud con IET (A1)
En fecha 29/11/2022 se realizó PETEX_Petición de examen sustantivo
En fecha 14/12/2022 se realizó Validación petición y/o pago de examen sustantivo conforme
En fecha 24/02/2023 se realizó El solicitante ha contestado pero existen nuevas objeciones a la concesión de la solicitud
En fecha 24/02/2023 se realizó Elaboración de examen sustantivo
En fecha 24/02/2023 se realizó 6120P_Notificación de examen sustantivo
En fecha 02/03/2023 se realizó Publicación de examen sustantivo
En fecha 26/04/2023 se realizó 3585X_Registro Solicitud Prórroga de Plazos
En fecha 27/04/2023 se realizó Concesión Prórroga de Plazos
En fecha 27/04/2023 se realizó 1585X_Notificación Concesión Prórroga de Plazos
En fecha 05/05/2023 se realizó Publicación Concesión Prórroga de Plazos (BOPI)
En fecha 09/05/2023 se realizó 5127P_Subsanación a defectos en examen sustantivo
En fecha 13/07/2023 se realizó Designación de Comisión de Expertos
En fecha 21/08/2023 se realizó Finalización de Examen Sustantivo
En fecha 21/08/2023 se realizó 6121P_Comunicación finalización de examen sustantivo
En fecha 25/08/2023 se realizó Publicación finalización de examen sustantivo
En fecha 01/09/2023 se realizó Concesión con examen sustantivo
En fecha 01/09/2023 se realizó Entrega título
En fecha 01/09/2023 se realizó 6125P_Notificación de concesión con examen sustantivo
En fecha 08/09/2023 se realizó Publicación concesión Patente
En fecha 08/09/2023 se realizó Publicación Folleto Concesión
En fecha 08/03/2024 se realizó Plazo expirado presentación de oposiciones contra la concesión de la Patente
En fecha 22/03/2024 se realizó Inscripcion de Cesion F202330435
En fecha 22/03/2024 se realizó Alta mandatario por inscripción de transmisión F202330435
Pagos:
18/02/2021 - Pago Tasas IET
01/12/2023 - Pago 03 Anualidad
06/03/2024 - Pago 04 Anualidad
+ ES-2921524_A11. Dispositivo de simulación, apto para su uso en entornos de realidad aumentada y/o virtual, que comprende: - una varilla (1) ; - medios de localización espacial, dispuestos en la varilla (1) , adaptados para su reconocimiento por unos primeros medios (4) ópticos de adquisición, para determinar la posición y orientación de la varilla (1) en el entorno de realidad aumentada y/o virtual; y - un actuador (2) táctil dispuesto en la varilla (1) , estando dicho dispositivo caracterizado por que el actuador (2) comprende medios de codificación del movimiento de, al menos, un dedo de la mano de un usuario de dicho dispositivo, en una dirección sustancialmente longitudinal a lo largo de la varilla (1) . 2. Dispositivo según la reivindicación anterior, donde los medios de localización espacial de la varilla (1) comprende uno o más de los siguientes elementos de identificación: marcadores (3) dispuestos en la varilla, y codificados con información óptica, apta para su reconocimiento por unos primeros medios (4) ópticos de adquisición; unos segundos medios (8) ópticos de adquisición de imagen alojados en el interior o anexos a la varilla (1) ; sensores electromagnéticos y/o sensores de infrarrojo. 3. Dispositivo según cualquiera de las reivindicaciones anteriores, donde el actuador (2) táctil está unido solidariamente a la varilla (1) y comprende un sensor (10) de contacto. 4. Dispositivo según las reivindicaciones 1-2, donde el actuador (2) comprende un elemento (5) desplazable respecto a la varilla (1) . 5. Dispositivo según la reivindicación anterior, que comprende adicionalmente un elemento (7) de retroceso conectado a un elemento (5) desplazable, adaptado para situar el elemento (5) desplazable en una posición de referencia a lo largo de la varilla (1) . 6. Dispositivo según la reivindicación anterior, donde la varilla (1) comprende un tope (9) que define la posición de referencia a lo largo de la varilla (1) . 7. Dispositivo según cualquiera de las reivindicaciones 5-6, donde el elemento (7) de retroceso se encuentra conectado a la varilla (1) y al elemento (5) desplazable. 8. Dispositivo según cualquiera de las reivindicaciones 5-7, donde el elemento (7) de retroceso comprende un muelle o un elemento elástico. 9. Dispositivo según cualquiera de las reivindicaciones 4-8, donde los medios de codificación están conectados al elemento (5) desplazable. 10. Dispositivo según las reivindicaciones 4-9, donde el elemento (5) desplazable comprende adicionalmente unas guías para su desplazamiento a lo largo de la varilla (1) . 11. Dispositivo según cualquiera de las reivindicaciones 5-8, donde los medios de codificación están conectados al elemento (5) desplazable y/o al elemento (7) de retroceso. 12. Dispositivo según cualquiera de las reivindicaciones anteriores, que comprende medios de procesamiento (6) y/o medios de transmisión (11) de información de codificación generada por el actuador (2) táctil. 13. Dispositivo según cualquiera de las reivindicaciones anteriores, donde el actuador (2) táctil comprende al menos uno de los siguientes elementos: una placa de circuito impreso flexible, un potenciómetro lineal o angular, un sensor capacitivo o resistivo, un sensor de efecto Hall o un codificador rotatorio. 14. Sistema de realidad aumentada y/o virtual, que comprende: - un dispositivo según cualquiera de las reivindicaciones anteriores; - un simulador representando un entorno de realidad aumentada y/o virtual; - unos primeros medios (4) ópticos de adquisición de imagen; - opcionalmente, unos segundos medios (8) ópticos de adquisición de imagen; - medios de visualización configurados para representar la interacción del usuario con el entorno de realidad aumentada y/o virtual a partir de las imágenes adquiridas por los primeros medios (4) ópticos, opcionalmente por los segundos medios (8) ópticos, y/o por la información de la interacción proporcionada por el actuador (2) ; - una unidad de almacenamiento y/o procesamiento de información, que comprende medios software/hardware configurados para registrar, procesar o transmitir en tiempo real la información proporcionada por el actuador (2) a los medios de visualización. 15. Procedimiento de interacción de un usuario con un entorno de realidad aumentada y/o virtual mediante un dispositivo según las reivindicaciones 1-14 o mediante el sistema según la reivindicación 15, caracterizado por que comprende la realización de un movimiento de pinza con dos dedos de la mano sobre la varilla (1) , desplazándolos en una dirección sustancialmente longitudinal a lo largo de la misma y activando para ello el actuador (2) con al menos uno de dichos dedos.
+ ES-2921524_B21. Dispositivo de simulación, apto para su uso en entornos de realidad aumentada y/o virtual, que comprende: - una varilla (1) ; - medios de localización espacial, dispuestos en la varilla (1) , adaptados para su reconocimiento por unos primeros medios (4) ópticos de adquisición, para determinar la posición y orientación de la varilla (1) en el entorno de realidad aumentada y/o virtual; y - un actuador (2) táctil dispuesto en la varilla (1) , estando dicho dispositivo caracterizado por que el actuador (2) comprende medios de codificación del movimiento de, al menos, un dedo de la mano de un usuario de dicho dispositivo, en una dirección sustancialmente longitudinal a lo largo de la varilla (1) . 2. Dispositivo según la reivindicación anterior, donde los medios de localización espacial de la varilla (1) comprende uno o más de los siguientes elementos de identificación: marcadores (3) dispuestos en la varilla, y codificados con información óptica, apta para su reconocimiento por unos primeros medios (4) ópticos de adquisición; unos segundos medios (8) ópticos de adquisición de imagen alojados en el interior o anexos a la varilla (1) ; sensores electromagnéticos y/o sensores de infrarrojo. 3. Dispositivo según cualquiera de las reivindicaciones anteriores, donde el actuador (2) táctil está unido solidariamente a la varilla (1) y comprende un sensor (10) de contacto. 4. Dispositivo según las reivindicaciones 1-2, donde el actuador (2) comprende un elemento (5) desplazable respecto a la varilla (1) . 5. Dispositivo según la reivindicación anterior, que comprende adicionalmente un elemento (7) de retroceso conectado a un elemento (5) desplazable, adaptado para situar el elemento (5) desplazable en una posición de referencia a lo largo de la varilla (1) . 6. Dispositivo según la reivindicación anterior, donde la varilla (1) comprende un tope (9) que define la posición de referencia a lo largo de la varilla (1) . 7. Dispositivo según cualquiera de las reivindicaciones 5-6, donde el elemento (7) de retroceso se encuentra conectado a la varilla (1) y al elemento (5) desplazable. 8. Dispositivo según cualquiera de las reivindicaciones 5-7, donde el elemento (7) de retroceso comprende un muelle o un elemento elástico. 9. Dispositivo según cualquiera de las reivindicaciones 4-8, donde los medios de codificación están conectados al elemento (5) desplazable. 10. Dispositivo según las reivindicaciones 4-9, donde el elemento (5) desplazable comprende adicionalmente unas guías para su desplazamiento a lo largo de la varilla (1) . 11. Dispositivo según cualquiera de las reivindicaciones 5-8, donde los medios de codificación están conectados al elemento (5) desplazable y/o al elemento (7) de retroceso. 12. Dispositivo según cualquiera de las reivindicaciones anteriores, que comprende medios de procesamiento (6) y/o medios de transmisión (11) de información de codificación generada por el actuador (2) táctil. 13. Dispositivo según cualquiera de las reivindicaciones anteriores, donde el actuador (2) táctil comprende al menos uno de los siguientes elementos: una placa de circuito impreso flexible, un potenciómetro lineal o angular, un sensor capacitivo o resistivo, un sensor de efecto Hall o un codificador rotatorio. 14. Sistema de realidad aumentada y/o virtual, que comprende: - un dispositivo según cualquiera de las reivindicaciones anteriores; - un simulador representando un entorno de realidad aumentada y/o virtual; - unos primeros medios (4) ópticos de adquisición de imagen; - opcionalmente, unos segundos medios (8) ópticos de adquisición de imagen; - medios de visualización configurados para representar la interacción del usuario con el entorno de realidad aumentada y/o virtual a partir de las imágenes adquiridas por los primeros medios (4) ópticos, opcionalmente por los segundos medios (8) ópticos, y/o por la información de la interacción proporcionada por el actuador (2) ; - una unidad de almacenamiento y/o procesamiento de información, que comprende medios software/hardware configurados para registrar, procesar o transmitir en tiempo real la información proporcionada por el actuador (2) a los medios de visualización. 15. Procedimiento de interacción de un usuario con un entorno de realidad aumentada y/o virtual mediante un dispositivo según las reivindicaciones 1-14 o mediante el sistema según la reivindicación 15, caracterizado por que comprende la realización de un movimiento de pinza con dos dedos de la mano sobre la varilla (1) , desplazándolos en una dirección sustancialmente longitudinal a lo largo de la misma y activando para ello el actuador (2) con al menos uno de dichos dedos.
Los productos y servicios protegidos por este registro son:
G09B 9/00
Descripciones:
+ ES-2921524_A1 DISPOSITIVO DE SIMULACIÓN APTO PARA SU USO EN ENTORNOS DE REALIDAD AUMENTADA O REALIDAD VIRTUAL CAMPO DE LA INVENCIÓN La presente invención se enmarca en ámbito de las técnicas de simulación de la interacción entre uno o más objetos y un dispositivo (o herramienta) controlado por un usuario, en un entorno de realidad aumentada y/o virtual. Más concretamente, la invención se refiere a un dispositivo táctil que permite al usuario interactuar con un objeto simulando el aporte o extracción de material del mismo, de modo que es particularmente ventajoso en la simulación de operaciones y técnicas soldadura, así como para el aprendizaje o perfeccionamiento de las mismas. ESTADO DE LA TÉCNICA En la actualidad la formación de soldadores profesionales implica un gasto considerable de material (materiales de soldadura, piezas, etc.) , así como de la generación de emisiones y desechos con impacto medioambiental. Para solventar estos problemas, la patente española ES 2438440 B1 proporciona un dispositivo avanzado para la formación en soldadura, basado en realidad aumentada y que puede ser actualizado en remoto, permitiendo entrenar en todos los tipos de soldadura industrial convencionales. Además, la tecnología "Soldamatic", comercializada por Seaber y Augmented Technology SL, y las realizaciones de la patente estadounidense US 10460621 B2 implementan diferentes soluciones para la simulación mediante Realidad Aumentada (RA) de diversos ejercicios de soldadura, que permiten la formación y desarrollo de capacidades técnicas y profesionales, evitando este gasto económico y medioambiental. A pesar de las ventajas derivadas de la aplicación de la AR y de la realidad virtual (RV) en los procesos de entrenamiento de técnicas de soldadura, en el estado de la técnica no existe aún un accesorio que permita simular, con un alto de similitud, las operaciones de aporte de material de soldadura mediante varillas, principalmente en técnicas de soldadura TIG (abreviatura en inglés de "tungsten inert gas") o similares. En las aplicaciones conocidas, el ejercicio de soldadura se efectúa típicamente acercando o alejando la varilla (o "stick") de fibra de carbono (que replica la varilla de aporte TIG) a un bjetivo, si bien este movimiento no se corresponde totalmente con la realidad, haciendo que el grado de perfeccionamiento de estas técnicas en entornos de RA/RV sea limitado. Otro diseño propuesto para facilitar el movimiento de aporte de material en la simulación de soldadura se divulga en el documento de patente CN 111085757 A. Dicho documento describe un dispositivo de alimentación de hilo de soldadura para la soldadura de arco de argón TIG, que comprende un cuerpo similar a un bolígrafo (más conocido como TIG-PEN) de alimentación de hilo, una boquilla de cerámica, un tubo guía, un dispositivo de amortiguación anti-retorno y un segundo tubo guía. El cuerpo es una estructura hueca con agujero de montaje en el extremo. Por tanto, en el estado de la técnica no se han podido obtener dispositivos capaces de solucionar el problema de reproducir de manera precisa, durante simulaciones de operaciones de unión (soldadura, etc.) , el movimiento que realiza el usuario (por ejemplo, un soldador) . La presente invención proporciona una solución a dicha necesidad, mediante un dispositivo que permite simular el aporte de material de forma táctil en simulación de RA/RV para soldadura TIG u otras operaciones similares. El dispositivo desarrollado, como se verá más adelante, no está limitado únicamente a este uso en soldadura simulada en entornos de realidad aumentada y/o realidad virtual, sino que puede emplearse para otro tipo de operaciones simuladas donde sea necesario una solución ergonómica para la interacción del usuario con dichos entornos de RV/RA. DESCRIPCIÓN BREVE DE LA INVENCIÓN La presente invención se enmarca en los sistemas interacción de objetos con una herramienta en sistemas de realidad aumentada (RA) o realidad virtual (RV) y permite solventar las limitaciones del estado de la técnica mencionadas anteriormente. Este dispositivo, estrechamente relacionado con el campo tecnológico al que pertenecen la RA/RV, tiene como interés principal ayudar a los usuarios a la formación y aprendizaje de técnicas de soldadura manual. Ventajosamente, el dispositivo permite reproducir al usuario la práctica del movimiento que comúnmente se realiza con una varilla de aporte de soldadura TIG real, de manera simulada (en lugar de una mera aproximación o alejamiento de la varilla, como en otros sistemas conocidos, cuya proximidad a la situación real es más limitada) y segura para el usuario. El objeto principal de la invención presenta, como se verá, múltiples ventajas frente a los dispositivos de tipo TIG-PEN. Mientras que éste último desplaza de forma real la varilla a ravés del interior del soporte, el dispositivo reivindicado en esta solicitud permite realizar el mismo movimiento para aprender la técnica de soldadura, pero sin mover dicha varilla y por lo tanto sin llegar a "consumirla". Preferiblemente, el dispositivo simula un sensor de aporte de material en soldadura TIG. Este dispositivo es compatible con el equipo "Soldamatic" antes mencionado, así como con las realizaciones divulgadas en el documento de patente US 10460621 B2. Más concretamente, un primer objeto de la presente invención se refiere a un dispositivo o herramienta de simulación, apto para su uso en entornos de realidad aumentada y/o virtual (RA/RV) , que comprende al menos los siguientes elementos: una varilla (por ejemplo, de fibra de carbono) , medios de localización espacial, adaptados para su reconocimiento por unos primeros medios (4) ópticos de adquisición, para determinar la posición y orientación de la varilla en el entorno de realidad aumentada y/o virtual; y un actuador táctil o dactilar, también dispuesto sobre la varilla. El actuador táctil se ha de entender, en el ámbito de la invención, como cualquier tipo de actuador operable con los dedos, y que permite generar una entrada de información al dispositivo por medios electromecánicos y/o electrónicos, a partir del movimiento que el usuario realiza con dichos dedos. En realizaciones preferentes de la invención, los medios de localización espacial de la varilla comprende uno o más de los siguientes elementos de identificación: marcadores (naturales o artificiales) dispuestos en la varilla y que están codificados con información óptica, apta para su adquisición por unos primeros medios ópticos de adquisición (por ejemplo, dichos medios pueden comprender cámaras pasivas externas al dispositivo, o colocadas en una máscara de soldadura) ; unos segundos medios ópticos de adquisición de imagen alojados en el interior o anexos a la varilla; sensores electromagnéticos y/o sensores de infrarrojo (que permiten la obtención de la posición de la varilla por triangulación) . En ciertas realizaciones, los primeros medios ópticos de adquisición pueden comprender cámaras integradas en dispositivos inteligentes (teléfono móvil, tableta, etc.) . De esta manera, gracias a los medios de localización espacial, la varilla puede ser localizada (por ejemplo, obtener sus coordenadas en el espacio tridimensional, su orientación, etc.) en el entorno de realidad aumentada y/o virtual. Ventajosamente en el dispositivo de la invención, el actuador táctil comprende medios de codificación del movimiento ejercido, al menos, con uno de los dedos de la mano de un usuario de dicho dispositivo, en una dirección sustancialmente longitudinal a lo largo de la varilla. Dicho actuador genera una señal, ya sea analógica o digital en diferentes realizaciones de la invención, que representa dicho movimiento. Ventajosamente, esto permite la utilización del dispositivo de forma ergonómica y sencilla para el usuario. Además, cuando el dispositivo es empleado como una herramienta de interacción en un entorno de RA/RV, permite la realización de una gran variedad de operaciones (por ejemplo, aplicar o eliminar una cierta cantidad de material a un objeto dispuesto en el entorno RA/RV) con gran precisión. Los marcadores del dispositivo comprenden, preferentemente, marcadores artificiales tales como LEDs, códigos QR, códigos de barras, esferas retrorreflectivas, y/o marcadores impresos; así como marcadores naturales tales como puntos característicos del objeto y/o herramienta simulada (por ejemplo, las esquinas, huecos o contornos de los mismos en el cuerpo del dispositivo pueden ser empleados como puntos característicos) . En este sentido, se entenderá como "información codificada" a cualquier información óptica asociada o comprendida en el objeto, de forma natural o añadida al mismo, que pueda ser captada por los medios ópticos de adquisición, y analizada por la unidad de procesamiento. En una realización preferente del dispositivo, el actuador táctil del dispositivo está unido solidariamente a la varilla y comprende un sensor de contacto, ya sea un sensor táctil capacitivo, piezorresistivo, piezoeléctrico, o similar. De esta manera, el actuador táctil es solidario a la varilla en el momento del uso de la misma, pudiéndose ser un actuador integrado en la misma o externo. En ciertas realizaciones, el actuador se encuentra unido a la varilla de forma no permanente, pero de manera resistente (ya sea con uniones de clipado, grapas, atornillado, etc.) , propiciando una unión firme para la realización de las operaciones de soldadura simuladas. En una realización alternativa a la anterior, el actuador del dispositivo comprende un elemento desplazable respecto a la varilla. Preferentemente, en esta realización el dispositivo comprende adicionalmente un elemento de retroceso conectado al elemento desplazable, adaptado para situar el elemento desplazable en una posición de referencia a lo largo de la varilla. Este elemento de retroceso puede ser accionado fácilmente por el usuario y volver, cuando se suelta, a una posición de referencia cuando el usuario realiza na operación sobre el dispositivo con sus dedos. En algunas realizaciones aún más preferentes, la varilla comprende un tope que define la citada posición de referencia a lo largo de la misma. En ciertas realizaciones particulares, el elemento de retroceso se encuentra conectado a la varilla y al elemento desplazable. Ventajosamente, en ciertas realizaciones el elemento de retroceso comprende un muelle o un elemento elástico. En otras realizaciones ventajosas del dispositivo, los medios de codificación están conectados al elemento desplazable. Alternativamente, en otras realizaciones los medios de codificación están conectados al elemento desplazable y/o al elemento de retroceso. En ambos casos, el elemento desplazable puede comprender adicionalmente unas guías para su desplazamiento a lo largo de la varilla. En realizaciones preferentes del dispositivo, la varilla está fabricada de fibra de carbono. De esta manera, la varilla es muy ligera y resistente, lo que no supone añadir peso innecesario al dispositivo y aporta realismo y estabilidad al mismo. Además, así se reduce la dificultad de operación. En implementaciones alternativas se pueden utilizar otros materiales, tales como acero inoxidable o un polímero termoplástico, en función de la operación simulada. En algunas realizaciones particulares, el dispositivo comprende además medios de procesamiento y/o medios de transmisión de información de codificación generada por el actuador táctil. En una realización preferente del dispositivo, éste comprende unos segundos medios ópticos de adquisición de imagen alojados en el interior o anexos a la varilla. Ventajosamente, cuando el sistema comprende los segundos medios ópticos, dichos medios son cámaras que permiten localizar activamente el dispositivo de la invención, lo que hace que pueda localizarse activamente a sí misma (por ejemplo, realizando el seguimiento en la imagen de una serie de marcadores ópticos, ya sean naturales o artificiales) y con mayor precisión que con los primeros medios ópticos, que son externos al sistema. Por el contrario, los primeros medios ópticos de adquisición de información comprenden cámaras pasivas para detectar al dispositivo. De este modo, el sistema está especialmente optimizado para aquellas situaciones en las que se quiere simular el uso del dispositivo de la invención para interactuar sobre otro objeto. En una realización aún más preferente del dispositivo, los segundos medios ópticos de adquisición de imagen comprenden una cámara endoscópica. La ventaja de la cámara endoscópica es que es muy compacta y se amolda fácilmente a todo tipo de herramientas, particularmente aquellas con forma cilíndrica. En otras realizaciones preferentes, el dispositivo comprende otro tipo de cámaras miniaturizadas, preferiblemente de alta resolución (por ejemplo, con un sensor CCD o CMOS de 720/1080 píxeles de altura y/o anchura) . En realizaciones alternativas del dispositivo, este comprende adicionalmente, uno o más sensores no ópticos para mejorar su precisión y robustez; preferiblemente sensores inerciales, inclinómetros de tres ejes, hápticos, térmicos, mecánicos o electromagnéticos. Además, estos sensores adicionales permiten evaluar de forma cuantitativa la destreza (entendida como ángulo de inclinación, velocidad en la realización de una cierta operación, etc.) con la que el usuario maneja el dispositivo, e introducir información adicional en el entorno de realidad virtual/aumentada con el que interactúa el usuario. En algunas realizaciones del dispositivo, el actuador táctil comprende una placa de circuito impreso flexible, un potenciómetro lineal o angular, un sensor capacitivo o resistivo, un sensor de efector Hall o un codificador rotatorio. Los primeros medios ópticos adquieren imágenes de una determinada operación que el usuario realiza sobre un objeto, ya sea real (en cuyo caso estaríamos ante un sistema de realidad aumentada) o virtual (en tal caso, tendríamos un sistema de realidad virtual) . En una realización preferente de la invención, los primeros medios ópticos se encuentran alojados en una máscara de soldadura; mientras que el dispositivo (con o sin los segundos medios ópticos integrados) simula una antorcha de soldadura y/o los elementos de aporte de material. Dichos elementos de aporte de material comprenden preferiblemente varillas de soldadura o electrodos de soldadura. Además, el objeto comprende una pieza sobre la que se simula la aplicación de un consumible de soldadura En otras realizaciones de la invención, se combinan elementos y ventajas de varias de las distintas realizaciones preferentes referidas anteriormente. Un segundo objeto de la invención se refiere a un sistema de realidad aumentada y/o virtual, que comprende: - Un dispositivo según cualquiera de las realizaciones descritas anteriormente. - Un simulador representando un entorno de realidad aumentada y/o virtual. En dicho entorno el dispositivo de la invención simula una herramienta (por ejemplo, un electrodo de soldadura) que interactúa sobre un objeto. Por tanto, el simulador está configurado para localizar la pieza y la herramienta dentro del entorno. - Unos primeros medios ópticos de adquisición de imagen (cámaras pasivas, externas al dispositivo) . - Opcionalmente, unos segundos medios ópticos de adquisición de imagen (por ejemplo, las cámaras activas colocadas en el interior o anexas a la varilla del propio dispositivo) . - Medios de visualización (por ejemplo, cualquier pantalla LCD, OLED, etc.) configurados para representar la interacción del usuario con el entorno de realidad aumentada y/o virtual a partir de las imágenes adquiridas por los primeros medios ópticos, opcionalmente por los segundos medios ópticos, y/o por la información de la interacción proporcionada por el actuador. Estos medios de visualización también representan la posición y orientación de la varilla dentro del entorno de realidad aumentada /o virtual. - Una unidad de almacenamiento y/o procesamiento de información, que comprende medios software/hardware configurados para registrar, procesar o transmitir en tiempo real la información proporcionada por el actuador a los medios de visualización. Por ejemplo, la información que obtiene el actuador puede representar la cantidad de material depositado sobre un objeto en el entorno RA/RV. Los medios software/hardware comprenden unidades de procesamiento por computador (CPU) , unidades de procesamiento gráfico (GPU) , medios de almacenamiento den la nube, etc. Dichos medios están configurados para captar la información del actuador, digitalizarla si es preciso y enviarla a través de una red (local o internet) a dispositivos remotos de representación de la información (pantallas, etc.) . En ciertas realizaciones del sistema de la invención, éste comprende más de un dispositivo de simulación según lo descrito anteriormente. En dichas realizaciones, el sistema comprende medios de identificación unívoca de cada uno de los dispositivos, permitiendo que varios dispositivos de simulación de acuerdo a la presente invención puedan interactuar en el mismo entorno de realidad aumentada y/o virtual. También forma parte de la invención el procedimiento para operar el dispositivo descrito con anterioridad, de tal manera que un usuario interactúa con un entorno de realidad aumentada y/o virtual mediante dicho dispositivo. De manera característica, el rocedimiento comprende la realización de un movimiento de pinza con dos dedos de la mano sobre la varilla, desplazándolos en una dirección sustancialmente longitudinal a lo largo de la misma y activando para ello el actuador con al menos uno de dichos dedos. En general, el dispositivo, método y el sistema descritos con anterioridad son apropiados para su uso en la representación de entornos de realidad aumentada y/o virtual en simulaciones de técnicas de aporte y/o extracción de material de soldadura, pintura industrial y/o procedimientos quirúrgicos y/u odontológicos. Un uso preferente de esta invención son los simuladores de RA/RV en los que sea necesario simular, de manera realista, la interacción entre el dispositivo descrito con anterioridad y un objeto (por ejemplo, cuando se simula un electrodo de soldadura) . Este tipo de simuladores son especialmente útiles en el ámbito académico ya que permiten practicar y aprender procesos que requieren habilidades manuales con las correspondientes ventajas de RA/RV (tales como el ahorro de material, permitir prácticas ilimitadas, gamificación del proceso de aprendizaje, habilita un entorno seguro para el aprendizaje sin riesgo de quemaduras para el usuario, etc.) . Ventajosamente, el dispositivo puede simular la aplicación del consumible de soldadura y cómo un determinado volumen de material es aportado o transferido al objeto. De tal manera, el actuador táctil será elegido para que tenga suficiente sensibilidad, según la requerida por el proceso de soldadura concreto que se simule. Particularmente, el dispositivo de la invención se puede utilizar en simulaciones de técnicas de aporte y/o extracción de material de soldadura, donde el dispositivo de simulación simula el comportamiento de una varilla de aporte para soldadura TIG (abreviatura en inglés para "tungsten inert gas") . Ventajosamente, la interacción con el sensor táctil emula de manera fidedigna el movimiento que realizaría el soldador durante una soldadura real, de acuerdo al movimiento de pinza ejercido por el usuario con al menos uno de los dedos, tal y como se ha descrito con anterioridad. A lo largo de la descripción y las reivindicaciones la palabra "comprende" y sus variantes no pretenden excluir otras características técnicas, aditivos, componentes o pasos. Para los expertos en la materia, otros objetos, ventajas y características de la invención se desprenderán en parte de la descripción y en parte de la práctica de la invención. Además, en el ámbito de la invención cuando se hace referencia a medios "ópticos" no se pretende limitar al espectro electromagnético "visible", sino que cualquier porción del ismo puede ser utilizada (ultravioleta, infrarrojos, etc.) . Asimismo, se entenderá el concepto de "información óptica" como cualquier elemento que comprenda información codificada que pueda leerse o adquirirse mediante medios de reconocimiento ópticos. Dicha información óptica podrá, por tanto, estar codificada en una pluralidad de soportes físicos (entre ellos los códigos QR, LEDs, imágenes, caracteres, códigos de barras, esferas retrorreflectivas, marcadores impresos, etc.) siempre que su reconocimiento o lectura pueda realizarse por medios ópticos (por ejemplo, una cámara) . Por otro lado, cuando se refiera una "cámara" dicha nomenclatura no es limitativa, de manera que sería equivalente a cualquier dispositivo capaz de adquirir información en forma de imagen y/o vídeo. Finalmente, cuando se emplea el término "sustancialmente" se hace referencia a un ángulo con un margen de tolerancia de ± 10 grados. BREVE DESCRIPCIÓN DE LAS FIGURAS A continuación, se presenta una descripción breve de cada una de las figuras usadas para complementar la descripción de la invención que sigue. Dichas figuras se relacionan con el estado de la técnica o con realizaciones preferentes de la invención, que se presentan como ejemplos no limitativos de la misma. La Figura 1 ilustra una realización particular de la invención, de aquí en adelante referida como realización A, en la que el actuador táctil es operado con un movimiento de pinzamiento para emular el movimiento realizado por el soldador durante una soldadura TIG. Las Figuras 2A-2J muestran imágenes de los diferentes movimientos de mano realizados por el usuario (por ejemplo, un soldador) para operar el dispositivo de la realización A. Concretamente, las Figuras 2A-2B se corresponden a un primer movimiento de pinzamiento, las Figuras 2C-2D a un segundo movimiento de pinzamiento, las Figuras 2E-2F a un tercer movimiento de pinzamiento, las Figuras 2G-2H a un cuarto movimiento de pinzamiento y las Figuras 2I-2J a un quinto movimiento de pinzamiento. Estos movimientos preferidos son particularmente útiles en simulación de soldadura, correspondiéndose los mismos con movimientos realizados en operaciones de soldadura real. Las Figuras 3A-3B corresponden a otra variante de la realización A, respectivamente en posición extendida y comprimida, donde el elemento de retroceso comprende un lemento elástico o muelle cuya compresión es utilizada para codificar el desplazamiento de la varilla telescópica. La Figura 4 representa otra realización particular de la invención, de aquí en adelante referida como realización B, en la que el actuador táctil es operado por el usuario deslizando uno o más dedos sobre el mismo. Las Figuras 5A-5B ilustran el movimiento de mano realizado por el soldador para operar el dispositivo de la realización B, y que consiste preferiblemente en un deslizamiento de un dedo sobre las zonas táctiles del actuador. La Figura 6 muestra una vista superior (a la izquierda) y una vista inferior (a la derecha) de una placa de circuito impreso (PCB) que forma parte del actuador táctil de la realización B descrita en los párrafos anteriores. Dicha PCB comprende una zona táctil y caja de componentes electrónicos. La Figura 7 muestra una vista posterior de la realización B, donde se ven las guías para acoplar el actuador táctil a la varilla. La Figura 8 representa una vista del sistema completo para una aplicación de simulación de soldadura en un entorno de realidad aumentada o virtual. Descripción de las referencias numéricas de las Figuras: DESCRIPCIÓN DETALLADA DE LA INVENCIÓN Como se ha descrito en apartados anteriores, y tal como se representa en las Figuras 1 8, un objeto principal de la invención se refiere a un dispositivo de simulación, apto para su uso en entornos de realidad aumentada y/o virtual, que comprende: - una varilla (1) ; - medios de localización espacial para determinar la posición y orientación de la varilla (1) en el entorno de realidad aumentada y/o virtual; y - un actuador (2) táctil dispuesto en la varilla (1) , donde el actuador (2) táctil comprende medios de codificación del movimiento de, al menos, un dedo de la mano de un usuario de dicho dispositivo, en una dirección sustancialmente longitudinal a lo largo de la varilla (1) . En realizaciones particulares, los medios de localización espacial comprenden uno o más marcadores (3) dispuestos en la varilla (1) están preferentemente codificados con información óptica, apta para su adquisición por unos primeros medios (4) ópticos de adquisición (por ejemplo, dichos medios pueden comprender cámaras pasivas externas al dispositivo) . Asimismo, el actuador (2) táctil se ha de entender, en el ámbito de la invención, como cualquier tipo de actuador operable con los dedos, y que permite generar una entrada de información al dispositivo por medios electromecánicos y/o electrónicos, a partir del movimiento que el usuario realiza con dichos dedos. Como realizaciones particulares, en modo alguno limitativas del alcance de las reivindicaciones, se describen a continuación dos ejemplos de posibles implementaciones del dispositivo de la invención. En concreto, ambas se refieren a dispositivos para su uso en soldadura TIG. Realización A Esta realización preferente de la presente invención, representada en la Figura 1, recoge electromecánicamente el movimiento de las técnicas de aporte de varilla (1) TIG usada por soldadores. Dichos movimientos se basan en el pinzamiento con los dedos de la varilla (1) TIG para desplazarla linealmente, como se ilustra en las Figuras 2A-2J. Concretamente, dichas Figuras 2A-2J comprenden movimientos de pinzamiento preferentes para operar la realización A para simular el aporte de material de soldadura. En el caso de esta invención, el usuario pinzará el elemento (5) desplazable del actuador táctil (2) , que se moverá linealmente. Ventajosamente, el movimiento lineal del elemento (5) desplazable se realizará a lo largo de la varilla (1) , que permanecerá estática, y será detectado y medido por unos medios (6) de procesamiento, en particular, un sistema electromecánico de medición lineal. El desplazamiento se traducirá en una transferencia de material proporcional al desplazamiento mediante simulación con Realidad Aumentada para soldadura TIG. Además, para que el usuario pueda repetir el gesto múltiples veces, el dispositivo de la invención incorpora un elemento (7) de retroceso que cuando el usuario suelte el elemento (5) desplazable, éste vuelva a su posición inicial preparándolo para una nueva medición. La varilla (1) es una parte rígida y estática del sensor de aporte de material TIG. La principal función de este elemento, además de servir como punto de agarre para el usuario, es servir de guía al movimiento lineal del elemento (5) desplazable. En esta realización, la varilla (1) tiene un diámetro máximo de 5 mm y es de longitud variable. La varilla (1) puede ser hueca o, alternativamente, maciza. Cuando es hueca, la varilla (1) puede alojar en su interior unos segundos medios (8) ópticos de adquisición de imagen. El elemento (5) desplazable es la parte del dispositivo que el usuario pinzará con sus dedos para hacer el gesto de aporte de material. El elemento (5) desplazable tiene un hueco gracias al cual podrá deslizarse a lo largo de la varilla (1) . Su forma más habitual es un tubo de 5 cm de longitud, si bien puede adoptar otras dimensiones para hacerlo más ergonómico al agarre con los dedos. El elemento (7) de retroceso se encarga de que el elemento (5) desplazable vuelva a su posición inicial una vez que el usuario haya terminado el gesto de aporte, es decir, cuando suelta el elemento (5) desplazable. Este elemento (7) de retroceso se conecta a la varilla (1) y al elemento (5) desplazable y puede ser un muelle o un elástico. Para segurar que el elemento (5) desplazable vuelva siempre al mismo punto inicial de referencia, se establece un tope (9) sobre la varilla (1) que define ese punto inicial. En esta realización, los medios (6) de procesamiento comprenden un sistema electromecánico de medición lineal encargado de medir el movimiento de gesto de aporte a través del elemento (5) desplazable y enviarlo a través de un protocolo de comunicación compatible con un computador como puede ser USB. La medición del movimiento (desplazamiento) de uno o más dedos del usuario se puede realizar a través del actuador (2) táctil, que comprende uno o varios sensores (10) de contacto que a su vez comprenden al menos uno de los siguientes elementos: un potenciómetro lineal o angular, un sensor linear capacitivo o resistivo, un sensor de efecto Hall (u otros sensores magnéticos) , o incluso un codificador rotatorio ("encoder") . Este sensor (10) de contacto se conecta al elemento (5) desplazable con un vástago, tensor o cable. Electrónicamente el sensor (10) de contacto se conecta a medios (6) de procesamiento, por ejemplo, un microcontrolador o CPU (en inglés, "Computer Processing Unit") que se encarga de traducir las señales eléctricas a información digital que envía a través de medios (11) de transmisión de información y un protocolo de comunicación hacia el simulador del entorno de RA/RV, donde se emplea dicha información como fuente de información para actualizar la simulación. Otra variante de esta realización se recoge en las Figuras 3A y 3B. donde el elemento de retroceso (7) comprende un muelle cuya compresión es utilizada para codificar el desplazamiento de la varilla (1) telescópica. En particular, la Figura 3A corresponde a la posición extendida (o posición de reposo) del muelle ubicado en la varilla (1) , mientras la Figura 3B corresponde a la posición comprimida de dicho muelle. Dicha compresión es medida por el actuador (2) táctil y es convertida en una lectura del desplazamiento efectuado por el usuario (lo que a su vez será codificada como un volumen de aporte de material) mediante alguno de los sensores (10) incorporados en el actuador táctil (2) , tal y como se ha descrito anteriormente. Realización B Esta realización se muestra en la Figura 4. El actuador (2) táctil de esta realización del dispositivo para soldadura TIG comprende una placa de circuito impreso (PCB, por sus siglas en inglés "Printed Circuit Board") flexible, concretamente una placa electrónica capacitiva, que comprende un sensor (10) de contacto que detecta el deslizamiento del edo del usuario sobre ella, y unos medios (6) de procesamiento que traduce dicho deslizamiento en aporte de un volumen de material simulado en el entorno de RV/RA. La PCB está colocada sobre un soporte ergonómico que permite anclarla a la varilla (1) . El usuario realiza un movimiento lineal sobre la propia placa en las zonas (12) táctiles (tal y como se muestra en las Figuras 5A y 5B, deslizando el dedo sobre dichas zonas (12) táctiles) , que permanecerá estática. El movimiento será detectado por un sensor (10) de contacto y será traducido por los medios (6) de procesamiento en un cierto aporte de material proporcional al desplazamiento registrado, para su utilización como entrada de información a una simulación con Realidad Aumentada para soldadura TIG. La PCB, de material flexible, se acoplará a un soporte mecánico que permita su anclaje a la varilla (1) de fibra de carbono que hasta ahora se utiliza para simular el ejercicio de soldadura, dotando de ergonomía y realismo a la solución. El sensor capacitivo propuesto se ubicará en un soporte montante para la varilla (1) que no tiene orificio de entrada determinado, puede colocarse en cualquiera de los dos sentidos de desplazamiento longitudinal a lo largo de la varilla (1) , lo que facilita la experiencia de usuario. En esta realización, el componente principal del actuador (2) táctil comprende una placa electrónica PCB de dos capas de material flexible, color negro y grosor de 0, 2 mm con dimensiones de 15 mm de ancho y 80 mm de largo, dispuestos de forma irregular. Tal y como se ilustra en la Figura 6, en la parte superior (zona ancha) de la PCB se encuentra una caja (13) , o carcasa, comprendiendo los componentes electrónicos (microcontrolador, resistencias, condensadores, regulador de tensión, etc.) . Por otro lado, en la parte inferior (zona estrecha, libre de componentes y enmarcada entre líneas blancas) se encuentra la parte de PCB expuesta al usuario, o zona (12) táctil, por dónde se desplazarán los dedos para simular el aporte de material. El principio de funcionamiento de esta placa electrónica consiste en la creación de dos zonas (12) táctiles o "pads" que, asociados a una pluralidad de condensadores, detectan de forma capacitiva la proximidad del dedo al circuito. Según la ubicación de la huella dactilar a lo largo de estas dos zonas (12) táctiles, el actuador (2) táctil capta información y, posteriormente, los medios (6) de procesamiento realizan la traducción de dicha información en forma de datos o señales que marcan la posición exacta del dedo. Esta PCB se alimenta, preferentemente, por medio de una fuente de tensión continua de bajo voltaje (por ejemplo, 5V) y transmitirá los datos de posición de los dedos a través de unos medios (11) de transmisión de información, que en este caso comprenden, a modo de ejemplo, un cable USB. Dicho cable irá, preferentemente, directamente soldado a la placa PCB para evitar su desconexión. Para realizar el montaje de la PCB se ha diseñado un soporte ergonómico que permite sostenerla y operarla de diversas formas (tal y como se muestra en las Figuras 5A-5B) , todas útiles en la soldadura real y adaptadas a las necesidades de cada usuario en función de su preferencia a la hora de realizar el aporte de material. Esta carcasa (13) cubrirá la PCB en su totalidad, a excepción de las zonas (12) táctiles rodeados por el marco blanco que indica la zona útil. El soporte permite montar la placa electrónica en él sin necesidad de atornillar, pegar o anclar de cualquier otra forma la misma. La zona (12) táctil se apoyará en una superficie curva que abraza a la varilla (1) cilindrica longitudinalmente y quedará sujeta por todo el perímetro gracias a unas guias (14) dispuestas en la carcasa. Una tapa cubrirá la caja (13) de los componentes electrónicos y fijará el cable USB ejerciendo presión sobre él. El proceso de fabricación y montaje se detalla a continuación. En primer lugar, se recibirá la placa PCB montada con todos sus componentes, a la que deberá soldarse el cable USB. Una vez unidos ambos, se introduce la PCB desde la zona superior hasta la inferior de la carcasa (13) , desplazando cuidadosamente la zona (12) táctil levemente flectada longitudinalmente por las guias (14) dispuestas para ello, tal y como se muestra en la Figura 7. Se cerrará el conjunto con una tapa que ha de pegarse a la carcasa. Finalmente, la varilla (1) se introduce por la zona trasera del dispositivo y será funcional. Adicionalmente, la varilla (1) comprende en su interior un hueco para la disposición de unos segundos medios (8) ópticos, en particular una cámara endoscópica. La Figura 8 corresponde a un ejemplo preferente de sistema de acuerdo a la invención, equipado para su uso en simulaciones de realidad virtual o aumentada y que comprende al menos un dispositivo de simulación según se ha descrito anteriormente. En este caso, una o más cámaras pasivas de los primeros medios ópticos (4) están colocadas en una máscara de soldadura (15) que lleva colocada el usuario para realizar una operación sobre una pieza (16) sobre la que se aplica una operación de soldadura simulada en un entorno de realidad virtual o aumentada. La máscara de soldadura (15) comprende medios de representación gráfica para la visualización del entorno virtual o de realidad umentada. El usuario realiza la operación simulada mediante el dispositivo de la invención según cualquiera de las realizaciones descritas anteriormente. En realizaciones alternativas, el sistema que comprende al menos un dispositivo de acuerdo a la presente invención puede ser empleado en cualquier entorno de realidad virtual o aumentada para simular una interacción (por ejemplo, adición de material) . Otras realizaciones preferentes Alternativamente, como alternativas técnicas podría sustituirse la comunicación USB por Bluetooth. Esto eliminaría el cable USB, pero aumentaría indudablemente el tamaño del accesorio y habría que incluir una batería capaz de alimentar el conjunto. Algunas realizaciones alternativas del dispositivo incluyen un elemento de sujeción (por ejemplo, una correa de velcro unida a la muñeca del usuario) por la que pase el cable USB, para evitar desestabilizar la varilla (1) o giros indeseados de la misma. Otras realizaciones de la invención son una variante de la realización A, comprendiendo adicionalmente una varilla (1) hueca para alojar los segundos medios (8) ópticos, por ejemplo, una cámara endoscópica. En realizaciones más avanzadas de la invención, los sensores no ópticos (inclinómetros, etc.) proporcionan información adicional (velocidad con la que se emplea el dispositivo, orientación, etc.) que permiten codificar en el entorno de RV/RA interacciones más complejas que el aporte o extracción de material. En realizaciones alternativas de la invención, el actuador táctil (4) y la varilla (1) están integrados. Por ejemplo, en tales realizaciones la placa de circuito impreso puede ser rígida o, preferiblemente, flexible y adaptable a la forma de la varilla (1) para ser dispuesta rodeando la misma.
+ ES-2921524_B2 DISPOSITIVO DE SIMULACIÓN APTO PARA SU USO EN ENTORNOS DE REALIDAD AUMENTADA O REALIDAD VIRTUAL CAMPO DE LA INVENCIÓN La presente invención se enmarca en ámbito de las técnicas de simulación de la interacción entre uno o más objetos y un dispositivo (o herramienta) controlado por un usuario, en un entorno de realidad aumentada y/o virtual. Más concretamente, la invención se refiere a un dispositivo táctil que permite al usuario interactuar con un objeto simulando el aporte o extracción de material del mismo, de modo que es particularmente ventajoso en la simulación de operaciones y técnicas soldadura, así como para el aprendizaje o perfeccionamiento de las mismas. ESTADO DE LA TÉCNICA En la actualidad la formación de soldadores profesionales implica un gasto considerable de material (materiales de soldadura, piezas, etc.) , así como de la generación de emisiones y desechos con impacto medioambiental. Para solventar estos problemas, la patente española ES 2438440 B1 proporciona un dispositivo avanzado para la formación en soldadura, basado en realidad aumentada y que puede ser actualizado en remoto, permitiendo entrenar en todos los tipos de soldadura industrial convencionales. Además, la tecnología "Soldamatic", comercializada por Seaber y Augmented Technology SL, y las realizaciones de la patente estadounidense US 10460621 B2 implementan diferentes soluciones para la simulación mediante Realidad Aumentada (RA) de diversos ejercicios de soldadura, que permiten la formación y desarrollo de capacidades técnicas y profesionales, evitando este gasto económico y medioambiental. A pesar de las ventajas derivadas de la aplicación de la AR y de la realidad virtual (RV) en los procesos de entrenamiento de técnicas de soldadura, en el estado de la técnica no existe aún un accesorio que permita simular, con un alto de similitud, las operaciones de aporte de material de soldadura mediante varillas, principalmente en técnicas de soldadura TIG (abreviatura en inglés de "tungsten inert gas") o similares. En las aplicaciones conocidas, el ejercicio de soldadura se efectúa típicamente acercando o alejando la varilla (o "stick") de fibra de carbono (que replica la varilla de aporte TIG) a un bjetivo, si bien este movimiento no se corresponde totalmente con la realidad, haciendo que el grado de perfeccionamiento de estas técnicas en entornos de RA/RV sea limitado. Otro diseño propuesto para facilitar el movimiento de aporte de material en la simulación de soldadura se divulga en el documento de patente CN 111085757 A. Dicho documento describe un dispositivo de alimentación de hilo de soldadura para la soldadura de arco de argón TIG, que comprende un cuerpo similar a un bolígrafo (más conocido como TIG-PEN) de alimentación de hilo, una boquilla de cerámica, un tubo guía, un dispositivo de amortiguación anti-retorno y un segundo tubo guía. El cuerpo es una estructura hueca con agujero de montaje en el extremo. Por tanto, en el estado de la técnica no se han podido obtener dispositivos capaces de solucionar el problema de reproducir de manera precisa, durante simulaciones de operaciones de unión (soldadura, etc.) , el movimiento que realiza el usuario (por ejemplo, un soldador) . La presente invención proporciona una solución a dicha necesidad, mediante un dispositivo que permite simular el aporte de material de forma táctil en simulación de RA/RV para soldadura TIG u otras operaciones similares. El dispositivo desarrollado, como se verá más adelante, no está limitado únicamente a este uso en soldadura simulada en entornos de realidad aumentada y/o realidad virtual, sino que puede emplearse para otro tipo de operaciones simuladas donde sea necesario una solución ergonómica para la interacción del usuario con dichos entornos de RV/RA. DESCRIPCIÓN BREVE DE LA INVENCIÓN La presente invención se enmarca en los sistemas interacción de objetos con una herramienta en sistemas de realidad aumentada (RA) o realidad virtual (RV) y permite solventar las limitaciones del estado de la técnica mencionadas anteriormente. Este dispositivo, estrechamente relacionado con el campo tecnológico al que pertenecen la RA/RV, tiene como interés principal ayudar a los usuarios a la formación y aprendizaje de técnicas de soldadura manual. Ventajosamente, el dispositivo permite reproducir al usuario la práctica del movimiento que comúnmente se realiza con una varilla de aporte de soldadura TIG real, de manera simulada (en lugar de una mera aproximación o alejamiento de la varilla, como en otros sistemas conocidos, cuya proximidad a la situación real es más limitada) y segura para el usuario. El objeto principal de la invención presenta, como se verá, múltiples ventajas frente a los dispositivos de tipo TIG-PEN. Mientras que éste último desplaza de forma real la varilla a ravés del interior del soporte, el dispositivo reivindicado en esta solicitud permite realizar el mismo movimiento para aprender la técnica de soldadura, pero sin mover dicha varilla y por lo tanto sin llegar a "consumirla". Preferiblemente, el dispositivo simula un sensor de aporte de material en soldadura TIG. Este dispositivo es compatible con el equipo "Soldamatic" antes mencionado, así como con las realizaciones divulgadas en el documento de patente US 10460621 B2. Más concretamente, un primer objeto de la presente invención se refiere a un dispositivo o herramienta de simulación, apto para su uso en entornos de realidad aumentada y/o virtual (RA/RV) , que comprende al menos los siguientes elementos: una varilla (por ejemplo, de fibra de carbono) , medios de localización espacial, adaptados para su reconocimiento por unos primeros medios (4) ópticos de adquisición, para determinar la posición y orientación de la varilla en el entorno de realidad aumentada y/o virtual; y un actuador táctil o dactilar, también dispuesto sobre la varilla. El actuador táctil se ha de entender, en el ámbito de la invención, como cualquier tipo de actuador operable con los dedos, y que permite generar una entrada de información al dispositivo por medios electromecánicos y/o electrónicos, a partir del movimiento que el usuario realiza con dichos dedos. En realizaciones preferentes de la invención, los medios de localización espacial de la varilla comprende uno o más de los siguientes elementos de identificación: marcadores (naturales o artificiales) dispuestos en la varilla y que están codificados con información óptica, apta para su adquisición por unos primeros medios ópticos de adquisición (por ejemplo, dichos medios pueden comprender cámaras pasivas externas al dispositivo, o colocadas en una máscara de soldadura) ; unos segundos medios ópticos de adquisición de imagen alojados en el interior o anexos a la varilla; sensores electromagnéticos y/o sensores de infrarrojo (que permiten la obtención de la posición de la varilla por triangulación) . En ciertas realizaciones, los primeros medios ópticos de adquisición pueden comprender cámaras integradas en dispositivos inteligentes (teléfono móvil, tableta, etc.) . De esta manera, gracias a los medios de localización espacial, la varilla puede ser localizada (por ejemplo, obtener sus coordenadas en el espacio tridimensional, su orientación, etc.) en el entorno de realidad aumentada y/o virtual. Ventajosamente en el dispositivo de la invención, el actuador táctil comprende medios de codificación del movimiento ejercido, al menos, con uno de los dedos de la mano de un usuario de dicho dispositivo, en una dirección sustancialmente longitudinal a lo largo de la varilla. Dicho actuador genera una señal, ya sea analógica o digital en diferentes realizaciones de la invención, que representa dicho movimiento. Ventajosamente, esto permite la utilización del dispositivo de forma ergonómica y sencilla para el usuario. Además, cuando el dispositivo es empleado como una herramienta de interacción en un entorno de RA/RV, permite la realización de una gran variedad de operaciones (por ejemplo, aplicar o eliminar una cierta cantidad de material a un objeto dispuesto en el entorno RA/RV) con gran precisión. Los marcadores del dispositivo comprenden, preferentemente, marcadores artificiales tales como LEDs, códigos QR, códigos de barras, esferas retrorreflectivas, y/o marcadores impresos; así como marcadores naturales tales como puntos característicos del objeto y/o herramienta simulada (por ejemplo, las esquinas, huecos o contornos de los mismos en el cuerpo del dispositivo pueden ser empleados como puntos característicos) . En este sentido, se entenderá como "información codificada" a cualquier información óptica asociada o comprendida en el objeto, de forma natural o añadida al mismo, que pueda ser captada por los medios ópticos de adquisición, y analizada por la unidad de procesamiento. En una realización preferente del dispositivo, el actuador táctil del dispositivo está unido solidariamente a la varilla y comprende un sensor de contacto, ya sea un sensor táctil capacitivo, piezorresistivo, piezoeléctrico, o similar. De esta manera, el actuador táctil es solidario a la varilla en el momento del uso de la misma, pudiéndose ser un actuador integrado en la misma o externo. En ciertas realizaciones, el actuador se encuentra unido a la varilla de forma no permanente, pero de manera resistente (ya sea con uniones de clipado, grapas, atornillado, etc.) , propiciando una unión firme para la realización de las operaciones de soldadura simuladas. En una realización alternativa a la anterior, el actuador del dispositivo comprende un elemento desplazable respecto a la varilla. Preferentemente, en esta realización el dispositivo comprende adicionalmente un elemento de retroceso conectado al elemento desplazable, adaptado para situar el elemento desplazable en una posición de referencia a lo largo de la varilla. Este elemento de retroceso puede ser accionado fácilmente por el usuario y volver, cuando se suelta, a una posición de referencia cuando el usuario realiza na operación sobre el dispositivo con sus dedos. En algunas realizaciones aún más preferentes, la varilla comprende un tope que define la citada posición de referencia a lo largo de la misma. En ciertas realizaciones particulares, el elemento de retroceso se encuentra conectado a la varilla y al elemento desplazable. Ventajosamente, en ciertas realizaciones el elemento de retroceso comprende un muelle o un elemento elástico. En otras realizaciones ventajosas del dispositivo, los medios de codificación están conectados al elemento desplazable. Alternativamente, en otras realizaciones los medios de codificación están conectados al elemento desplazable y/o al elemento de retroceso. En ambos casos, el elemento desplazable puede comprender adicionalmente unas guías para su desplazamiento a lo largo de la varilla. En realizaciones preferentes del dispositivo, la varilla está fabricada de fibra de carbono. De esta manera, la varilla es muy ligera y resistente, lo que no supone añadir peso innecesario al dispositivo y aporta realismo y estabilidad al mismo. Además, así se reduce la dificultad de operación. En implementaciones alternativas se pueden utilizar otros materiales, tales como acero inoxidable o un polímero termoplástico, en función de la operación simulada. En algunas realizaciones particulares, el dispositivo comprende además medios de procesamiento y/o medios de transmisión de información de codificación generada por el actuador táctil. En una realización preferente del dispositivo, éste comprende unos segundos medios ópticos de adquisición de imagen alojados en el interior o anexos a la varilla. Ventajosamente, cuando el sistema comprende los segundos medios ópticos, dichos medios son cámaras que permiten localizar activamente el dispositivo de la invención, lo que hace que pueda localizarse activamente a sí misma (por ejemplo, realizando el seguimiento en la imagen de una serie de marcadores ópticos, ya sean naturales o artificiales) y con mayor precisión que con los primeros medios ópticos, que son externos al sistema. Por el contrario, los primeros medios ópticos de adquisición de información comprenden cámaras pasivas para detectar al dispositivo. De este modo, el sistema está especialmente optimizado para aquellas situaciones en las que se quiere simular el uso del dispositivo de la invención para interactuar sobre otro objeto. En una realización aún más preferente del dispositivo, los segundos medios ópticos de adquisición de imagen comprenden una cámara endoscópica. La ventaja de la cámara endoscópica es que es muy compacta y se amolda fácilmente a todo tipo de herramientas, particularmente aquellas con forma cilíndrica. En otras realizaciones preferentes, el dispositivo comprende otro tipo de cámaras miniaturizadas, preferiblemente de alta resolución (por ejemplo, con un sensor CCD o CMOS de 720/1080 píxeles de altura y/o anchura) . En realizaciones alternativas del dispositivo, este comprende adicionalmente, uno o más sensores no ópticos para mejorar su precisión y robustez; preferiblemente sensores inerciales, inclinómetros de tres ejes, hápticos, térmicos, mecánicos o electromagnéticos. Además, estos sensores adicionales permiten evaluar de forma cuantitativa la destreza (entendida como ángulo de inclinación, velocidad en la realización de una cierta operación, etc.) con la que el usuario maneja el dispositivo, e introducir información adicional en el entorno de realidad virtual/aumentada con el que interactúa el usuario. En algunas realizaciones del dispositivo, el actuador táctil comprende una placa de circuito impreso flexible, un potenciómetro lineal o angular, un sensor capacitivo o resistivo, un sensor de efector Hall o un codificador rotatorio. Los primeros medios ópticos adquieren imágenes de una determinada operación que el usuario realiza sobre un objeto, ya sea real (en cuyo caso estaríamos ante un sistema de realidad aumentada) o virtual (en tal caso, tendríamos un sistema de realidad virtual) . En una realización preferente de la invención, los primeros medios ópticos se encuentran alojados en una máscara de soldadura; mientras que el dispositivo (con o sin los segundos medios ópticos integrados) simula una antorcha de soldadura y/o los elementos de aporte de material. Dichos elementos de aporte de material comprenden preferiblemente varillas de soldadura o electrodos de soldadura. Además, el objeto comprende una pieza sobre la que se simula la aplicación de un consumible de soldadura En otras realizaciones de la invención, se combinan elementos y ventajas de varias de las distintas realizaciones preferentes referidas anteriormente. Un segundo objeto de la invención se refiere a un sistema de realidad aumentada y/o virtual, que comprende: - Un dispositivo según cualquiera de las realizaciones descritas anteriormente. - Un simulador representando un entorno de realidad aumentada y/o virtual. En dicho entorno el dispositivo de la invención simula una herramienta (por ejemplo, un electrodo de soldadura) que interactúa sobre un objeto. Por tanto, el simulador está configurado para localizar la pieza y la herramienta dentro del entorno. - Unos primeros medios ópticos de adquisición de imagen (cámaras pasivas, externas al dispositivo) . - Opcionalmente, unos segundos medios ópticos de adquisición de imagen (por ejemplo, las cámaras activas colocadas en el interior o anexas a la varilla del propio dispositivo) . - Medios de visualización (por ejemplo, cualquier pantalla LCD, OLED, etc.) configurados para representar la interacción del usuario con el entorno de realidad aumentada y/o virtual a partir de las imágenes adquiridas por los primeros medios ópticos, opcionalmente por los segundos medios ópticos, y/o por la información de la interacción proporcionada por el actuador. Estos medios de visualización también representan la posición y orientación de la varilla dentro del entorno de realidad aumentada /o virtual. - Una unidad de almacenamiento y/o procesamiento de información, que comprende medios software/hardware configurados para registrar, procesar o transmitir en tiempo real la información proporcionada por el actuador a los medios de visualización. Por ejemplo, la información que obtiene el actuador puede representar la cantidad de material depositado sobre un objeto en el entorno RA/RV. Los medios software/hardware comprenden unidades de procesamiento por computador (CPU) , unidades de procesamiento gráfico (GPU) , medios de almacenamiento den la nube, etc. Dichos medios están configurados para captar la información del actuador, digitalizarla si es preciso y enviarla a través de una red (local o internet) a dispositivos remotos de representación de la información (pantallas, etc.) . En ciertas realizaciones del sistema de la invención, éste comprende más de un dispositivo de simulación según lo descrito anteriormente. En dichas realizaciones, el sistema comprende medios de identificación unívoca de cada uno de los dispositivos, permitiendo que varios dispositivos de simulación de acuerdo a la presente invención puedan interactuar en el mismo entorno de realidad aumentada y/o virtual. También forma parte de la invención el procedimiento para operar el dispositivo descrito con anterioridad, de tal manera que un usuario interactúa con un entorno de realidad aumentada y/o virtual mediante dicho dispositivo. De manera característica, el rocedimiento comprende la realización de un movimiento de pinza con dos dedos de la mano sobre la varilla, desplazándolos en una dirección sustancialmente longitudinal a lo largo de la misma y activando para ello el actuador con al menos uno de dichos dedos. En general, el dispositivo, método y el sistema descritos con anterioridad son apropiados para su uso en la representación de entornos de realidad aumentada y/o virtual en simulaciones de técnicas de aporte y/o extracción de material de soldadura, pintura industrial y/o procedimientos quirúrgicos y/u odontológicos. Un uso preferente de esta invención son los simuladores de RA/RV en los que sea necesario simular, de manera realista, la interacción entre el dispositivo descrito con anterioridad y un objeto (por ejemplo, cuando se simula un electrodo de soldadura) . Este tipo de simuladores son especialmente útiles en el ámbito académico ya que permiten practicar y aprender procesos que requieren habilidades manuales con las correspondientes ventajas de RA/RV (tales como el ahorro de material, permitir prácticas ilimitadas, gamificación del proceso de aprendizaje, habilita un entorno seguro para el aprendizaje sin riesgo de quemaduras para el usuario, etc.) . Ventajosamente, el dispositivo puede simular la aplicación del consumible de soldadura y cómo un determinado volumen de material es aportado o transferido al objeto. De tal manera, el actuador táctil será elegido para que tenga suficiente sensibilidad, según la requerida por el proceso de soldadura concreto que se simule. Particularmente, el dispositivo de la invención se puede utilizar en simulaciones de técnicas de aporte y/o extracción de material de soldadura, donde el dispositivo de simulación simula el comportamiento de una varilla de aporte para soldadura TIG (abreviatura en inglés para "tungsten inert gas") . Ventajosamente, la interacción con el sensor táctil emula de manera fidedigna el movimiento que realizaría el soldador durante una soldadura real, de acuerdo al movimiento de pinza ejercido por el usuario con al menos uno de los dedos, tal y como se ha descrito con anterioridad. A lo largo de la descripción y las reivindicaciones la palabra "comprende" y sus variantes no pretenden excluir otras características técnicas, aditivos, componentes o pasos. Para los expertos en la materia, otros objetos, ventajas y características de la invención se desprenderán en parte de la descripción y en parte de la práctica de la invención. Además, en el ámbito de la invención cuando se hace referencia a medios "ópticos" no se pretende limitar al espectro electromagnético "visible", sino que cualquier porción del ismo puede ser utilizada (ultravioleta, infrarrojos, etc.) . Asimismo, se entenderá el concepto de "información óptica" como cualquier elemento que comprenda información codificada que pueda leerse o adquirirse mediante medios de reconocimiento ópticos. Dicha información óptica podrá, por tanto, estar codificada en una pluralidad de soportes físicos (entre ellos los códigos QR, LEDs, imágenes, caracteres, códigos de barras, esferas retrorreflectivas, marcadores impresos, etc.) siempre que su reconocimiento o lectura pueda realizarse por medios ópticos (por ejemplo, una cámara) . Por otro lado, cuando se refiera una "cámara" dicha nomenclatura no es limitativa, de manera que sería equivalente a cualquier dispositivo capaz de adquirir información en forma de imagen y/o vídeo. Finalmente, cuando se emplea el término "sustancialmente" se hace referencia a un ángulo con un margen de tolerancia de ± 10 grados. BREVE DESCRIPCIÓN DE LAS FIGURAS A continuación, se presenta una descripción breve de cada una de las figuras usadas para complementar la descripción de la invención que sigue. Dichas figuras se relacionan con el estado de la técnica o con realizaciones preferentes de la invención, que se presentan como ejemplos no limitativos de la misma. La Figura 1 ilustra una realización particular de la invención, de aquí en adelante referida como realización A, en la que el actuador táctil es operado con un movimiento de pinzamiento para emular el movimiento realizado por el soldador durante una soldadura TIG. Las Figuras 2A-2J muestran imágenes de los diferentes movimientos de mano realizados por el usuario (por ejemplo, un soldador) para operar el dispositivo de la realización A. Concretamente, las Figuras 2A-2B se corresponden a un primer movimiento de pinzamiento, las Figuras 2C-2D a un segundo movimiento de pinzamiento, las Figuras 2E-2F a un tercer movimiento de pinzamiento, las Figuras 2G-2H a un cuarto movimiento de pinzamiento y las Figuras 2I-2J a un quinto movimiento de pinzamiento. Estos movimientos preferidos son particularmente útiles en simulación de soldadura, correspondiéndose los mismos con movimientos realizados en operaciones de soldadura real. Las Figuras 3A-3B corresponden a otra variante de la realización A, respectivamente en posición extendida y comprimida, donde el elemento de retroceso comprende un lemento elástico o muelle cuya compresión es utilizada para codificar el desplazamiento de la varilla telescópica. La Figura 4 representa otra realización particular de la invención, de aquí en adelante referida como realización B, en la que el actuador táctil es operado por el usuario deslizando uno o más dedos sobre el mismo. Las Figuras 5A-5B ilustran el movimiento de mano realizado por el soldador para operar el dispositivo de la realización B, y que consiste preferiblemente en un deslizamiento de un dedo sobre las zonas táctiles del actuador. La Figura 6 muestra una vista superior (a la izquierda) y una vista inferior (a la derecha) de una placa de circuito impreso (PCB) que forma parte del actuador táctil de la realización B descrita en los párrafos anteriores. Dicha PCB comprende una zona táctil y caja de componentes electrónicos. La Figura 7 muestra una vista posterior de la realización B, donde se ven las guías para acoplar el actuador táctil a la varilla. La Figura 8 representa una vista del sistema completo para una aplicación de simulación de soldadura en un entorno de realidad aumentada o virtual. Descripción de las referencias numéricas de las Figuras: DESCRIPCIÓN DETALLADA DE LA INVENCIÓN Como se ha descrito en apartados anteriores, y tal como se representa en las Figuras 1 8, un objeto principal de la invención se refiere a un dispositivo de simulación, apto para su uso en entornos de realidad aumentada y/o virtual, que comprende: - una varilla (1) ; - medios de localización espacial para determinar la posición y orientación de la varilla (1) en el entorno de realidad aumentada y/o virtual; y - un actuador (2) táctil dispuesto en la varilla (1) , donde el actuador (2) táctil comprende medios de codificación del movimiento de, al menos, un dedo de la mano de un usuario de dicho dispositivo, en una dirección sustancialmente longitudinal a lo largo de la varilla (1) . En realizaciones particulares, los medios de localización espacial comprenden uno o más marcadores (3) dispuestos en la varilla (1) están preferentemente codificados con información óptica, apta para su adquisición por unos primeros medios (4) ópticos de adquisición (por ejemplo, dichos medios pueden comprender cámaras pasivas externas al dispositivo) . Asimismo, el actuador (2) táctil se ha de entender, en el ámbito de la invención, como cualquier tipo de actuador operable con los dedos, y que permite generar una entrada de información al dispositivo por medios electromecánicos y/o electrónicos, a partir del movimiento que el usuario realiza con dichos dedos. Como realizaciones particulares, en modo alguno limitativas del alcance de las reivindicaciones, se describen a continuación dos ejemplos de posibles implementaciones del dispositivo de la invención. En concreto, ambas se refieren a dispositivos para su uso en soldadura TIG. ea zac n Esta realización preferente de la presente invención, representada en la Figura 1, recoge electromecánicamente el movimiento de las técnicas de aporte de varilla (1) TIG usada por soldadores. Dichos movimientos se basan en el pinzamiento con los dedos de la varilla (1) TIG para desplazarla linealmente, como se ilustra en las Figuras 2A-2J. Concretamente, dichas Figuras 2A-2J comprenden movimientos de pinzamiento preferentes para operar la realización A para simular el aporte de material de soldadura. En el caso de esta invención, el usuario pinzará el elemento (5) desplazable del actuador táctil (2) , que se moverá linealmente. Ventajosamente, el movimiento lineal del elemento (5) desplazable se realizará a lo largo de la varilla (1) , que permanecerá estática, y será detectado y medido por unos medios (6) de procesamiento, en particular, un sistema electromecánico de medición lineal. El desplazamiento se traducirá en una transferencia de material proporcional al desplazamiento mediante simulación con Realidad Aumentada para soldadura TIG. Además, para que el usuario pueda repetir el gesto múltiples veces, el dispositivo de la invención incorpora un elemento (7) de retroceso que cuando el usuario suelte el elemento (5) desplazable, éste vuelva a su posición inicial preparándolo para una nueva medición. La varilla (1) es una parte rígida y estática del sensor de aporte de material TIG. La principal función de este elemento, además de servir como punto de agarre para el usuario, es servir de guía al movimiento lineal del elemento (5) desplazable. En esta realización, la varilla (1) tiene un diámetro máximo de 5 mm y es de longitud variable. La varilla (1) puede ser hueca o, alternativamente, maciza. Cuando es hueca, la varilla (1) puede alojar en su interior unos segundos medios (8) ópticos de adquisición de imagen. El elemento (5) desplazable es la parte del dispositivo que el usuario pinzará con sus dedos para hacer el gesto de aporte de material. El elemento (5) desplazable tiene un hueco gracias al cual podrá deslizarse a lo largo de la varilla (1) . Su forma más habitual es un tubo de 5 cm de longitud, si bien puede adoptar otras dimensiones para hacerlo más ergonómico al agarre con los dedos. El elemento (7) de retroceso se encarga de que el elemento (5) desplazable vuelva a su posición inicial una vez que el usuario haya terminado el gesto de aporte, es decir, cuando suelta el elemento (5) desplazable. Este elemento (7) de retroceso se conecta a la varilla (1) y al elemento (5) desplazable y puede ser un muelle o un elástico. Para segurar que el elemento (5) desplazable vuelva siempre al mismo punto inicial de referencia, se establece un tope (9) sobre la varilla (1) que define ese punto inicial. En esta realización, los medios (6) de procesamiento comprenden un sistema electromecánico de medición lineal encargado de medir el movimiento de gesto de aporte a través del elemento (5) desplazable y enviarlo a través de un protocolo de comunicación compatible con un computador como puede ser USB. La medición del movimiento (desplazamiento) de uno o más dedos del usuario se puede realizar a través del actuador (2) táctil, que comprende uno o varios sensores (10) de contacto que a su vez comprenden al menos uno de los siguientes elementos: un potenciómetro lineal o angular, un sensor linear capacitivo o resistivo, un sensor de efecto Hall (u otros sensores magnéticos) , o incluso un codificador rotatorio ("encoder") . Este sensor (10) de contacto se conecta al elemento (5) desplazable con un vástago, tensor o cable. Electrónicamente el sensor (10) de contacto se conecta a medios (6) de procesamiento, por ejemplo, un microcontrolador o CPU (en inglés, "Computer Processing Unit") que se encarga de traducir las señales eléctricas a información digital que envía a través de medios (11) de transmisión de información y un protocolo de comunicación hacia el simulador del entorno de RA/RV, donde se emplea dicha información como fuente de información para actualizar la simulación. Otra variante de esta realización se recoge en las Figuras 3A y 3B. donde el elemento de retroceso (7) comprende un muelle cuya compresión es utilizada para codificar el desplazamiento de la varilla (1) telescópica. En particular, la Figura 3A corresponde a la posición extendida (o posición de reposo) del muelle ubicado en la varilla (1) , mientras la Figura 3B corresponde a la posición comprimida de dicho muelle. Dicha compresión es medida por el actuador (2) táctil y es convertida en una lectura del desplazamiento efectuado por el usuario (lo que a su vez será codificada como un volumen de aporte de material) mediante alguno de los sensores (10) incorporados en el actuador táctil (2) , tal y como se ha descrito anteriormente. Realización B Esta realización se muestra en la Figura 4. El actuador (2) táctil de esta realización del dispositivo para soldadura TIG comprende una placa de circuito impreso (PCB, por sus siglas en inglés "Printed Circuit Board") flexible, concretamente una placa electrónica capacitiva, que comprende un sensor (10) de contacto que detecta el deslizamiento del edo del usuario sobre ella, y unos medios (6) de procesamiento que traduce dicho deslizamiento en aporte de un volumen de material simulado en el entorno de RV/RA. La PCB está colocada sobre un soporte ergonómico que permite anclarla a la varilla (1) . El usuario realiza un movimiento lineal sobre la propia placa en las zonas (12) táctiles (tal y como se muestra en las Figuras 5A y 5B, deslizando el dedo sobre dichas zonas (12) táctiles) , que permanecerá estática. El movimiento será detectado por un sensor (10) de contacto y será traducido por los medios (6) de procesamiento en un cierto aporte de material proporcional al desplazamiento registrado, para su utilización como entrada de información a una simulación con Realidad Aumentada para soldadura TIG. La PCB, de material flexible, se acoplará a un soporte mecánico que permita su anclaje a la varilla (1) de fibra de carbono que hasta ahora se utiliza para simular el ejercicio de soldadura, dotando de ergonomía y realismo a la solución. El sensor capacitivo propuesto se ubicará en un soporte montante para la varilla (1) que no tiene orificio de entrada determinado, puede colocarse en cualquiera de los dos sentidos de desplazamiento longitudinal a lo largo de la varilla (1) , lo que facilita la experiencia de usuario. En esta realización, el componente principal del actuador (2) táctil comprende una placa electrónica PCB de dos capas de material flexible, color negro y grosor de 0, 2 mm con dimensiones de 15 mm de ancho y 80 mm de largo, dispuestos de forma irregular. Tal y como se ilustra en la Figura 6, en la parte superior (zona ancha) de la PCB se encuentra una caja (13) , o carcasa, comprendiendo los componentes electrónicos (microcontrolador, resistencias, condensadores, regulador de tensión, etc.) . Por otro lado, en la parte inferior (zona estrecha, libre de componentes y enmarcada entre líneas blancas) se encuentra la parte de PCB expuesta al usuario, o zona (12) táctil, por dónde se desplazarán los dedos para simular el aporte de material. El principio de funcionamiento de esta placa electrónica consiste en la creación de dos zonas (12) táctiles o "pads" que, asociados a una pluralidad de condensadores, detectan de forma capacitiva la proximidad del dedo al circuito. Según la ubicación de la huella dactilar a lo largo de estas dos zonas (12) táctiles, el actuador (2) táctil capta información y, posteriormente, los medios (6) de procesamiento realizan la traducción de dicha información en forma de datos o señales que marcan la posición exacta del dedo. Esta PCB se alimenta, preferentemente, por medio de una fuente de tensión continua de bajo voltaje (por ejemplo, 5V) y transmitirá los datos de posición de los dedos a través de unos medios (11) de transmisión de información, que en este caso comprenden, a modo de ejemplo, un cable USB. Dicho cable irá, preferentemente, directamente soldado a la placa PCB para evitar su desconexión. Para realizar el montaje de la PCB se ha diseñado un soporte ergonómico que permite sostenerla y operarla de diversas formas (tal y como se muestra en las Figuras 5A-5B) , todas útiles en la soldadura real y adaptadas a las necesidades de cada usuario en función de su preferencia a la hora de realizar el aporte de material. Esta carcasa (13) cubrirá la PCB en su totalidad, a excepción de las zonas (12) táctiles rodeados por el marco blanco que indica la zona útil. El soporte permite montar la placa electrónica en él sin necesidad de atornillar, pegar o anclar de cualquier otra forma la misma. La zona (12) táctil se apoyará en una superficie curva que abraza a la varilla (1) cilindrica longitudinalmente y quedará sujeta por todo el perímetro gracias a unas guias (14) dispuestas en la carcasa. Una tapa cubrirá la caja (13) de los componentes electrónicos y fijará el cable USB ejerciendo presión sobre él. El proceso de fabricación y montaje se detalla a continuación. En primer lugar, se recibirá la placa PCB montada con todos sus componentes, a la que deberá soldarse el cable USB. Una vez unidos ambos, se introduce la PCB desde la zona superior hasta la inferior de la carcasa (13) , desplazando cuidadosamente la zona (12) táctil levemente flectada longitudinalmente por las guias (14) dispuestas para ello, tal y como se muestra en la Figura 7. Se cerrará el conjunto con una tapa que ha de pegarse a la carcasa. Finalmente, la varilla (1) se introduce por la zona trasera del dispositivo y será funcional. Adicionalmente, la varilla (1) comprende en su interior un hueco para la disposición de unos segundos medios (8) ópticos, en particular una cámara endoscópica. La Figura 8 corresponde a un ejemplo preferente de sistema de acuerdo a la invención, equipado para su uso en simulaciones de realidad virtual o aumentada y que comprende al menos un dispositivo de simulación según se ha descrito anteriormente. En este caso, una o más cámaras pasivas de los primeros medios ópticos (4) están colocadas en una máscara de soldadura (15) que lleva colocada el usuario para realizar una operación sobre una pieza (16) sobre la que se aplica una operación de soldadura simulada en un entorno de realidad virtual o aumentada. La máscara de soldadura (15) comprende medios de representación gráfica para la visualización del entorno virtual o de realidad umentada. El usuario realiza la operación simulada mediante el dispositivo de la invención según cualquiera de las realizaciones descritas anteriormente. En realizaciones alternativas, el sistema que comprende al menos un dispositivo de acuerdo a la presente invención puede ser empleado en cualquier entorno de realidad virtual o aumentada para simular una interacción (por ejemplo, adición de material) . Otras realizaciones preferentes Alternativamente, como alternativas técnicas podría sustituirse la comunicación USB por Bluetooth. Esto eliminaría el cable USB, pero aumentaría indudablemente el tamaño del accesorio y habría que incluir una batería capaz de alimentar el conjunto. Algunas realizaciones alternativas del dispositivo incluyen un elemento de sujeción (por ejemplo, una correa de velcro unida a la muñeca del usuario) por la que pase el cable USB, para evitar desestabilizar la varilla (1) o giros indeseados de la misma. Otras realizaciones de la invención son una variante de la realización A, comprendiendo adicionalmente una varilla (1) hueca para alojar los segundos medios (8) ópticos, por ejemplo, una cámara endoscópica. En realizaciones más avanzadas de la invención, los sensores no ópticos (inclinómetros, etc.) proporcionan información adicional (velocidad con la que se emplea el dispositivo, orientación, etc.) que permiten codificar en el entorno de RV/RA interacciones más complejas que el aporte o extracción de material. En realizaciones alternativas de la invención, el actuador táctil (4) y la varilla (1) están integrados. Por ejemplo, en tales realizaciones la placa de circuito impreso puede ser rígida o, preferiblemente, flexible y adaptable a la forma de la varilla (1) para ser dispuesta rodeando la misma.
Publicaciones:
ES2921524 (29/08/2022) - A1 Solicitud de patente con informe sobre el estado de la técnica
ES2921524 (08/09/2023) - B2 Patente de invención con examen
Eventos:
En fecha 18/02/2021 se realizó Registro Instancia de Solicitud
En fecha 18/02/2021 se realizó Admisión a Trámite
En fecha 18/02/2021 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 23/02/2021 se realizó Concesión solicitud de reducción de tasas
En fecha 23/02/2021 se realizó Superado examen de oficio
En fecha 01/03/2021 se realizó Publicación concesión reducción de tasas
En fecha 25/08/2021 se realizó Realizado IET
En fecha 31/08/2021 se realizó 1109P_Comunicación Traslado del IET
En fecha 10/02/2022 se realizó 3411X_Alta Mandatarios
En fecha 10/02/2022 se realizó Alta mandatario
En fecha 29/08/2022 se realizó Publicación Solicitud
En fecha 29/08/2022 se realizó Publicación Folleto Solicitud con IET (A1)
En fecha 29/11/2022 se realizó PETEX_Petición de examen sustantivo
En fecha 14/12/2022 se realizó Validación petición y/o pago de examen sustantivo conforme
En fecha 24/02/2023 se realizó El solicitante ha contestado pero existen nuevas objeciones a la concesión de la solicitud
En fecha 24/02/2023 se realizó Elaboración de examen sustantivo
En fecha 24/02/2023 se realizó 6120P_Notificación de examen sustantivo
En fecha 02/03/2023 se realizó Publicación de examen sustantivo
En fecha 26/04/2023 se realizó 3585X_Registro Solicitud Prórroga de Plazos
En fecha 27/04/2023 se realizó Concesión Prórroga de Plazos
En fecha 27/04/2023 se realizó 1585X_Notificación Concesión Prórroga de Plazos
En fecha 05/05/2023 se realizó Publicación Concesión Prórroga de Plazos (BOPI)
En fecha 09/05/2023 se realizó 5127P_Subsanación a defectos en examen sustantivo
En fecha 13/07/2023 se realizó Designación de Comisión de Expertos
En fecha 21/08/2023 se realizó Finalización de Examen Sustantivo
En fecha 21/08/2023 se realizó 6121P_Comunicación finalización de examen sustantivo
En fecha 25/08/2023 se realizó Publicación finalización de examen sustantivo
En fecha 01/09/2023 se realizó Concesión con examen sustantivo
En fecha 01/09/2023 se realizó Entrega título
En fecha 01/09/2023 se realizó 6125P_Notificación de concesión con examen sustantivo
En fecha 08/09/2023 se realizó Publicación concesión Patente
En fecha 08/09/2023 se realizó Publicación Folleto Concesión
En fecha 08/03/2024 se realizó Plazo expirado presentación de oposiciones contra la concesión de la Patente
En fecha 22/03/2024 se realizó Inscripcion de Cesion F202330435
En fecha 22/03/2024 se realizó Alta mandatario por inscripción de transmisión F202330435
Pagos:
18/02/2021 - Pago Tasas IET
01/12/2023 - Pago 03 Anualidad
06/03/2024 - Pago 04 Anualidad
Fuente de la información
Parte de la información aquí publicada es pública puesto que ha sido obtenida de la Oficina de Propiedad Industrial de los diferentes países el 27/04/2024 y por lo tanto puede ser que la información no esté actualizada.Parte de la información aquí mostrada ha sido calculada por nuestro sistema informático y puede no ser veraz.
Privacidad
Si considera que al información aquí publicada afecta a su privacidad y desea que eliminemos la información aquí publicada envíe un email a info@patentes-y-marcas.com o rellene el formulario que encontrará aquí.Información sobre el registro de patente nacional por DISPOSITIVO DE SIMULACIÓN APTO PARA SU USO EN ENTORNOS DE REALIDAD AUMENTADA O REALIDAD VIRTUAL con el número P202130127
El registro de patente nacional por DISPOSITIVO DE SIMULACIÓN APTO PARA SU USO EN ENTORNOS DE REALIDAD AUMENTADA O REALIDAD VIRTUAL con el número P202130127 fue solicitada el 18/02/2021. Se trata de un registro en España por lo que este registro no ofrece protección en el resto de países. El registro DISPOSITIVO DE SIMULACIÓN APTO PARA SU USO EN ENTORNOS DE REALIDAD AUMENTADA O REALIDAD VIRTUAL con el número P202130127 fue solicitada por SEABERY SOLUCIONES, S.L. mediante los servicios del agente Nicolás ESCUDERO PRIETO. El registro [modality] por DISPOSITIVO DE SIMULACIÓN APTO PARA SU USO EN ENTORNOS DE REALIDAD AUMENTADA O REALIDAD VIRTUAL con el número P202130127 está clasificado como G09B 9/00 según la clasificación internacional de patentes.
Otras invenciones solicitadas por SEABERY SOLUCIONES, S.L.
Es posible conocer todas las invenciones solicitadas por SEABERY SOLUCIONES, S.L. entre las que se encuentra el registro de patente nacional por DISPOSITIVO DE SIMULACIÓN APTO PARA SU USO EN ENTORNOS DE REALIDAD AUMENTADA O REALIDAD VIRTUAL con el número P202130127. Si se desean conocer más invenciones solicitadas por SEABERY SOLUCIONES, S.L. clicar aquí.Otras invenciones solicitadas en la clasificación internacional de patentes G09B 9/00.
Es posible conocer invenciones similares al campo de la técnica se refiere. El registro de patente nacional por DISPOSITIVO DE SIMULACIÓN APTO PARA SU USO EN ENTORNOS DE REALIDAD AUMENTADA O REALIDAD VIRTUAL con el número P202130127 está clasificado con la clasificación G09B 9/00 por lo que si se desea conocer más registros con la clasificación G09B 9/00 clicar aquí.Otras invenciones solicitadas a través del representante NICOLÁS ESCUDERO PRIETO
Es posible conocer todas las invenciones solicitadas a través del agente NICOLÁS ESCUDERO PRIETO entre las que se encuentra el registro patente nacional por DISPOSITIVO DE SIMULACIÓN APTO PARA SU USO EN ENTORNOS DE REALIDAD AUMENTADA O REALIDAD VIRTUAL con el número P202130127. Si se desean conocer más invenciones solicitadas a través del agente NICOLÁS ESCUDERO PRIETO clicar aquí.Patentes en España
Es posible conocer todas las invenciones publicadas en España entre las que se encuentra el registro patente nacional por DISPOSITIVO DE SIMULACIÓN APTO PARA SU USO EN ENTORNOS DE REALIDAD AUMENTADA O REALIDAD VIRTUAL. Nuestro portal www.patentes-y-marcas.com ofrece acceso a las publicaciones de patentes en España. Conocer las patentes registradas en un país es importante para saber las posibilidades de fabricar, vender o explotar una invención en España.Patentes registradas en la clase G
Es posible conocer todas las patentes registradas en la clase G (FISICA) entre las que se encuentra la patente DISPOSITIVO DE SIMULACIÓN APTO PARA SU USO EN ENTORNOS DE REALIDAD AUMENTADA O REALIDAD VIRTUAL con el número P202130127. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase G09
Es posible conocer todas las patentes registradas en la clase G09 (ENSEÑANZA; CRIPTOGRAFIA; PRESENTACION; PUBLICIDAD; PRECINTOS) entre las que se encuentra la patente DISPOSITIVO DE SIMULACIÓN APTO PARA SU USO EN ENTORNOS DE REALIDAD AUMENTADA O REALIDAD VIRTUAL con el número P202130127. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase G09B
Es posible conocer todas las patentes registradas en la clase G09B (MATERIAL EDUCATIVO O DE DEMOSTRACION; MEDIOS DE ENSEÑANZA O DE COMUNICACION DESTINADOS A LOS CIEGOS,) entre las que se encuentra la patente DISPOSITIVO DE SIMULACIÓN APTO PARA SU USO EN ENTORNOS DE REALIDAD AUMENTADA O REALIDAD VIRTUAL con el número P202130127. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.
¿Tienes alguna duda?
Escribe tu consulta y te responderemos rápida y gratuitamente.

Otras patentes similares
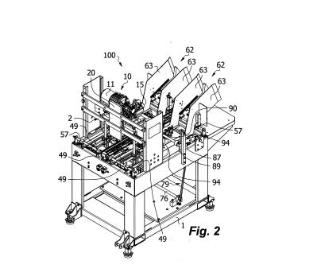
 P202130103
P202130103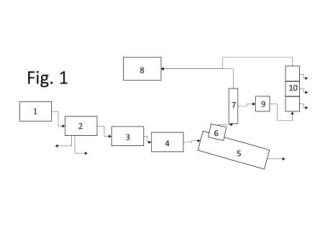 P202130125
P202130125 P202130150
P202130150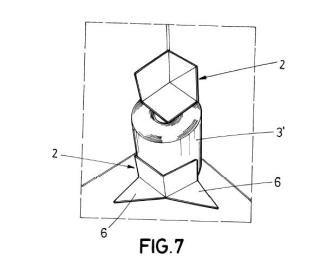 P202130178
P202130178Profesionales Recomendados
Barcelona
933182440
España
933182440
España

Barcelona
+34 93 362 16 97
España
+34 93 362 16 97
España

Barcelona
932 593 600
España
932 593 600
España







