


- Home /
- Publicaciones de patentes /
- Sistema LIDAR con cambio de frecuencia Doppler suprimido
Patente nacional por "Sistema LIDAR con cambio de frecuencia Doppler suprimido"
Este registro ha sido solicitado por
MOURO LABS S.L.
a través del representanteÁNGEL PONS ARIÑO
Contacto
- Estado: A punto de caducar
- País:
- España
- Fecha solicitud:
- 21/04/2020
- Número solicitud:
-
P202030326
- Número publicación:
-
ES2868473
- Fecha de concesión:
-
21/02/2022
- Inventores:
-
Persona física
- Datos del titular:
-
Mouro Labs S.L.
- Datos del representante:
-
Ángel Pons Ariño
- Clasificación Internacional de Patentes:
- G01S 17/02,G01S 7/48
- Clasificación Internacional de Patentes de la publicación:
- G01S 17/02,G01S 7/48
- Fecha de vencimiento:
Quiero registrar una patente

Reivindicaciones:
+ ES-2868473_B21.- Sistema de detección y medición mediante luz (LIDAR) con cambio de frecuencia Doppler suprimido, que comprende: - al menos una fuente de luz configurada para emitir una primera luz, - al menos una abertura de entrada de formación de imágenes (101) y un canal de formación de imágenes (3) asociado a la al menos una abertura de entrada de formación de imágenes (101) , configurada para recibir una luz reflejada de entrada que se refleja sobre un objeto en movimiento irradiado por la al menos una fuente de luz, - al menos una abertura de referencia (102) y un canal de referencia (4) asociado a la al menos una abertura de referencia (102) , configurada para recibir una luz reflejada de referencia que se refleja sobre el objeto en movimiento irradiado por la fuente de luz, - al menos un oscilador de formación de imágenes (111) , - al menos un primer receptor óptico de formación de imágenes (5) asociado a la abertura de entrada de formación de imágenes (101) y al oscilador de formación de imágenes (111) y configurado para obtener una señal de interferencia entre la luz reflejada de entrada y el oscilador de formación de imágenes (111) , - un oscilador de referencia (112) , - un receptor óptico de referencia (6) asociado a la abertura de referencia (101) y al oscilador de referencia (112) y configurado para obtener una señal de interferencia de referencia entre la luz reflejada de referencia y el oscilador de referencia (112) , - al menos un mezclador (12) , conectado a el al menos un primer receptor óptico de formación de imágenes (5) y al receptor óptico de referencia (6) y configurado para producir un producto de intermodulación (16) entre la señal de interferencia y la señal de interferencia de referencia, de tal manera que se cancela o disminuye el cambio de frecuencia Doppler provocado por el objeto en movimiento. 2.- El sistema LIDAR de la reivindicación 1, en el que el al menos un primer receptor óptico de formación de imágenes (5) es un receptor IQ óptico configurado para obtener una señal de interferencia entre la luz reflejada de entrada y el oscilador de formación de imágenes (111) que comprende una primera componente en fase (7) y una primera componente en cuadratura (8) , y el receptor óptico de referencia (6) es un receptor IQ óptico configurado para obtener una señal de interferencia de referencia que comprende una componente en fase de referencia (9) y una componente en cuadratura de referencia (10) . 3.- El sistema LIDAR de la reivindicación 2, que comprende además un módulo de derivación de tiempo (15) , asociado al receptor óptico de referencia (6) y destinado a derivar en tiempo el componente en fase de referencia (9) y el componente en cuadratura de referencia (10) . 4.- El sistema LIDAR de la reivindicación 2, en el que el al menos un mezclador (12) comprende: - un primer mezclador (121) , destinado a mezclar la primera componente en cuadratura (8) y la componente en fase de referencia (9) , - un segundo mezclador (122) , destinado a mezclar la primera componente en fase (7) y la componente en fase de referencia (9) . 5.- El sistema LIDAR de la reivindicación 2, en el que el al menos un mezclador (12) comprende: - un primer mezclador (121) , destinado a mezclar la primera componente en cuadratura (8) y la componente en cuadratura de referencia (10) , - un segundo mezclador (122) , destinado a mezclar la primera componente en fase (7) y la componente en cuadratura de referencia (10) . 6.- El sistema LIDAR de la reivindicación 2, en el que el al menos un mezclador (12) comprende: - un tercer mezclador (123) , destinado a mezclar la primera componente en fase (7) y la componente en cuadratura de referencia derivada en tiempo (91) , y - un cuarto mezclador (124) , destinado a mezclar la primera componente en cuadratura (8) y la componente en cuadratura de referencia derivada en tiempo (91) . 7.- El sistema LIDAR de la reivindicación 2, en el que el al menos un mezclador (12) comprende: - un tercer mezclador (123) , destinado a mezclar la primera componente en fase (7) y la componente en fase de referencia derivada en tiempo (90) , y - un cuarto mezclador (124) , destinado a mezclar la primera componente en uadratura (8) y la componente en fase de referencia derivada en tiempo (90) . 8.- El sistema LIDAR de cualquiera de las reivindicaciones 4 a 7, que comprende además un filtro de paso bajo (23) asociado a cada mezclador (12) . 9.- El sistema LIDAR de la reivindicación 1, en el que el oscilador de referencia (112) y el oscilador de formación de imágenes (111) comparten un origen común. 10.- El sistema LIDAR de la reivindicación 1, en el que la abertura de referencia (102) es la misma que la abertura de entrada (101) , y el canal de referencia (4) y el canal de formación de imágenes (3) se derivan a partir de la misma por medio de un divisor (2) . 11.- El sistema LIDAR de la reivindicación 1, en el que la longitud de onda del oscilador de referencia (112) permanece estática y la longitud de onda del primer oscilador óptico (111) se barre siguiendo un esquema FMCW (onda continua modulada en frecuencia) convencional. 12.- El sistema LIDAR de la reivindicación 1, que comprende además uno o más filtros de paso bajo (13) , asociados a los receptores ópticos (5, 6) y destinados a filtrar la señal de interferencia y la señal de interferencia de referencia, eliminando las frecuencias muy altas. 13.- El sistema LIDAR de la reivindicación 2, que comprende además unos amplificadores de transimpedancia (14) colocados después del receptor óptico de referencia (6) y del primer receptor óptico de formación de imágenes (5) , destinados a amplificar el componente en fase de referencia (9) , el componente en cuadratura de referencia (10) , el primer componente en fase (7) y el primer componente en cuadratura (8) . 14.- El sistema LIDAR de cualquiera de las reivindicaciones 1, 4 a 7, en el que los mezcladores (12) son celdas Gilbert. 15.- Un sistema LIDAR que comprende: - al menos una fuente de luz configurada para emitir una primera luz, - al menos una abertura de entrada de formación de imágenes (101) y un canal de formación de imágenes (3) asociado a la al menos una abertura de entrada e formación de imágenes (101) , configurada para recibir una luz reflejada de entrada que se refleja sobre un objeto en movimiento irradiado por la fuente de luz, - al menos una abertura de referencia (102) y un canal de referencia (4) asociado a la al menos una abertura de referencia (102) , configurada para recibir una luz reflejada de referencia que se refleja sobre el objeto en movimiento irradiado por la fuente de luz, - al menos un oscilador de formación de imágenes (111) , - al menos un primer receptor óptico de formación de imágenes (5) asociado a la abertura de entrada de formación de imágenes (101) y al oscilador de formación de imágenes (111) y configurado para obtener una señal de interferencia entre la luz reflejada de entrada y el oscilador de formación de imágenes (111) , - un oscilador de referencia (112) , - un receptor óptico de referencia (6) asociado a la abertura de referencia (101) y al oscilador de referencia (112) y configurado para obtener una señal de interferencia de referencia entre la luz reflejada de referencia y el oscilador de referencia (112) , - un modulador óptico (17) conectado a el al menos un oscilador de formación de imágenes (111) , y configurado para aplicar una modulación de amplitud o fase al oscilador de formación de imágenes (111) con una señal derivada a partir del canal de referencia (4) , de tal manera que un producto de intermodulación (16) entre la señal de interferencia y la señal de interferencia de referencia aparece en la salida del al menos un primer receptor óptico de formación de imágenes (5) , de tal manera que se cancela o disminuye el cambio de frecuencia Doppler provocado por el objeto en movimiento. 16.- El sistema LIDAR de la reivindicación 15, en el que el al menos un primer receptor óptico de formación de imágenes (5) es un receptor IQ óptico configurado para obtener una señal de interferencia entre la luz reflejada de entrada y el oscilador de formación de imágenes (111) que comprende una primera componente en fase (7) y una primera componente en cuadratura (8) , y el receptor óptico de referencia (6) es un receptor IQ óptico configurado para obtener una señal de interferencia de referencia que comprende una componente en fase de referencia (9) y una componente en cuadratura de referencia (10) . 17.- El sistema LIDAR de la reivindicación 15, en el que el oscilador de referencia (112) el oscilador de formación de imágenes (111) comparten un origen común. 18.- El sistema LIDAR de la reivindicación 15, en el que la abertura de referencia (102) es la misma que la abertura de entrada (101) , y el canal de referencia (4) y el canal de formación de imágenes (3) se derivan a partir de la misma por medio de un divisor (2) . 19.- El sistema LIDAR de la reivindicación 15, en el que la longitud de onda del oscilador de referencia (112) permanece estática y la longitud de onda del primer oscilador óptico (111) se barre siguiendo un esquema FMCW (onda continua modulada en frecuencia) convencional. 20.- El sistema LIDAR de la reivindicación 15, que comprende además uno o más filtros de paso bajo (13) , asociados a los receptores ópticos (5, 6) y destinados a filtrar la señal de interferencia y la señal de interferencia de referencia, eliminando las frecuencias muy altas. 21.- El sistema LIDAR de la reivindicación 16, que comprende adicionalmente unos amplificadores de transimpedancia (14) colocados después del receptor óptico de referencia (6) y del primer receptor óptico de formación de imágenes (5) , destinados a amplificar la componente en fase de referencia (9) , la componente en cuadratura de referencia (10) , la primera componente en fase (7) y la primera componente en cuadratura (8) . 22.- Método para suprimir el cambio de frecuencia Doppler en un sistema LIDAR, que hace uso del sistema de cualquiera de las reivindicaciones anteriores, y comprende las etapas de: - emitir una primera luz, dirigida a un objeto en movimiento, - recibir una luz reflejada procedente del objeto en movimiento, - obtener una primera señal de interferencia entre la luz reflejada y un oscilador de formación de imágenes (111) , - obtener una señal de interferencia de referencia entre la luz reflejada y un oscilador de referencia (112) , - obtener un producto de intermodulación (16) entre la señal de interferencia y la señal de interferencia de referencia, de tal manera que se cancela o disminuye el cambio de frecuencia Doppler provocado por el objeto en movimiento.
+ ES-2868473_A11.- Sistema de detección y medición mediante luz (LIDAR) con cambio de frecuencia Doppler suprimido, que comprende: - al menos una fuente de luz configurada para emitir una primera luz, - al menos una abertura de entrada de formación de imágenes (101) y un canal de formación de imágenes (3) asociado a la al menos una abertura de entrada de formación de imágenes (101) , configurada para recibir una luz reflejada de entrada que se refleja sobre un objeto en movimiento irradiado por la al menos una fuente de luz, - al menos una abertura de referencia (102) y un canal de referencia (4) asociado a la al menos una abertura de referencia (102) , configurada para recibir una luz reflejada de referencia que se refleja sobre el objeto en movimiento irradiado por la fuente de luz, - al menos un oscilador de formación de imágenes (111) , - al menos un primer receptor óptico de formación de imágenes (5) asociado a la abertura de entrada de formación de imágenes (101) y al oscilador de formación de imágenes (111) y configurado para obtener una señal de interferencia entre la luz reflejada de entrada y el oscilador de formación de imágenes (111) , - un oscilador de referencia (112) , - un receptor óptico de referencia (6) asociado a la abertura de referencia (101) y al oscilador de referencia (112) y configurado para obtener una señal de interferencia de referencia entre la luz reflejada de referencia y el oscilador de referencia (112) , - al menos un mezclador (12) , conectado a el al menos un primer receptor óptico de formación de imágenes (5) y al receptor óptico de referencia (6) y configurado para producir un producto de intermodulación (16) entre la señal de interferencia y la señal de interferencia de referencia, de tal manera que se cancela o disminuye el cambio de frecuencia Doppler provocado por el objeto en movimiento. 2.- El sistema LIDAR de la reivindicación 1, en el que el al menos un primer receptor óptico de formación de imágenes (5) es un receptor IQ óptico configurado para obtener una señal de interferencia entre la luz reflejada de entrada y el oscilador de formación de imágenes (111) que comprende una primera componente en fase (7) y una primera componente en cuadratura (8) , y el receptor óptico de referencia (6) es un receptor IQ óptico configurado para obtener una señal de interferencia de referencia que comprende una componente en fase de referencia (9) y una componente en cuadratura de referencia (10) . 3.- El sistema LIDAR de la reivindicación 2, que comprende además un módulo de derivación de tiempo (15) , asociado al receptor óptico de referencia (6) y destinado a derivar en tiempo el componente en fase de referencia (9) y el componente en cuadratura de referencia (10) . 4.- El sistema LIDAR de la reivindicación 2, en el que el al menos un mezclador (12) comprende: - un primer mezclador (121) , destinado a mezclar la primera componente en cuadratura (8) y la componente en fase de referencia (9) , - un segundo mezclador (122) , destinado a mezclar la primera componente en fase (7) y la componente en fase de referencia (9) . 5.- El sistema LIDAR de la reivindicación 2, en el que el al menos un mezclador (12) comprende: - un primer mezclador (121) , destinado a mezclar la primera componente en cuadratura (8) y la componente en cuadratura de referencia (10) , - un segundo mezclador (122) , destinado a mezclar la primera componente en fase (7) y la componente en cuadratura de referencia (10) . 6.- El sistema LIDAR de la reivindicación 2, en el que el al menos un mezclador (12) comprende: - un tercer mezclador (123) , destinado a mezclar la primera componente en fase (7) y la componente en cuadratura de referencia derivada en tiempo (91) , y - un cuarto mezclador (124) , destinado a mezclar la primera componente en cuadratura (8) y la componente en cuadratura de referencia derivada en tiempo (91) . 7.- El sistema LIDAR de la reivindicación 2, en el que el al menos un mezclador (12) comprende: - un tercer mezclador (123) , destinado a mezclar la primera componente en fase (7) y la componente en fase de referencia derivada en tiempo (90) , y - un cuarto mezclador (124) , destinado a mezclar la primera componente en uadratura (8) y la componente en fase de referencia derivada en tiempo (90) . 8.- El sistema LIDAR de cualquiera de las reivindicaciones 4 a 7, que comprende además un filtro de paso bajo (23) asociado a cada mezclador (12) . 9.- El sistema LIDAR de la reivindicación 1, en el que el oscilador de referencia (112) y el oscilador de formación de imágenes (111) comparten un origen común. 10.- El sistema LIDAR de la reivindicación 1, en el que la abertura de referencia (102) es la misma que la abertura de entrada (101) , y el canal de referencia (4) y el canal de formación de imágenes (3) se derivan a partir de la misma por medio de un divisor (2) . 11.- El sistema LIDAR de la reivindicación 1, en el que la longitud de onda del oscilador de referencia (112) permanece estática y la longitud de onda del primer oscilador óptico (111) se barre siguiendo un esquema FMCW (onda continua modulada en frecuencia) convencional. 12.- El sistema LIDAR de la reivindicación 1, que comprende además uno o más filtros de paso bajo (13) , asociados a los receptores ópticos (5, 6) y destinados a filtrar la señal de interferencia y la señal de interferencia de referencia, eliminando las frecuencias muy altas. 13.- El sistema LIDAR de la reivindicación 2, que comprende además unos amplificadores de transimpedancia (14) colocados después del receptor óptico de referencia (6) y del primer receptor óptico de formación de imágenes (5) , destinados a amplificar el componente en fase de referencia (9) , el componente en cuadratura de referencia (10) , el primer componente en fase (7) y el primer componente en cuadratura (8) . 14.- El sistema LIDAR de cualquiera de las reivindicaciones 1, 4 a 7, en el que los mezcladores (12) son celdas Gilbert. 15.- Un sistema LIDAR que comprende: - al menos una fuente de luz configurada para emitir una primera luz, - al menos una abertura de entrada de formación de imágenes (101) y un canal de formación de imágenes (3) asociado a la al menos una abertura de entrada e formación de imágenes (101) , configurada para recibir una luz reflejada de entrada que se refleja sobre un objeto en movimiento irradiado por la fuente de luz, - al menos una abertura de referencia (102) y un canal de referencia (4) asociado a la al menos una abertura de referencia (102) , configurada para recibir una luz reflejada de referencia que se refleja sobre el objeto en movimiento irradiado por la fuente de luz, - al menos un oscilador de formación de imágenes (111) , - al menos un primer receptor óptico de formación de imágenes (5) asociado a la abertura de entrada de formación de imágenes (101) y al oscilador de formación de imágenes (111) y configurado para obtener una señal de interferencia entre la luz reflejada de entrada y el oscilador de formación de imágenes (111) , - un oscilador de referencia (112) , - un receptor óptico de referencia (6) asociado a la abertura de referencia (101) y al oscilador de referencia (112) y configurado para obtener una señal de interferencia de referencia entre la luz reflejada de referencia y el oscilador de referencia (112) , - un modulador óptico (17) conectado a el al menos un oscilador de formación de imágenes (111) , y configurado para aplicar una modulación de amplitud o fase al oscilador de formación de imágenes (111) con una señal derivada a partir del canal de referencia (4) , de tal manera que un producto de intermodulación (16) entre la señal de interferencia y la señal de interferencia de referencia aparece en la salida del al menos un primer receptor óptico de formación de imágenes (5) , de tal manera que se cancela o disminuye el cambio de frecuencia Doppler provocado por el objeto en movimiento. 16.- El sistema LIDAR de la reivindicación 15, en el que el al menos un primer receptor óptico de formación de imágenes (5) es un receptor IQ óptico configurado para obtener una señal de interferencia entre la luz reflejada de entrada y el oscilador de formación de imágenes (111) que comprende una primera componente en fase (7) y una primera componente en cuadratura (8) , y el receptor óptico de referencia (6) es un receptor IQ óptico configurado para obtener una señal de interferencia de referencia que comprende una componente en fase de referencia (9) y una componente en cuadratura de referencia (10) . 17.- El sistema LIDAR de la reivindicación 15, en el que el oscilador de referencia (112) el oscilador de formación de imágenes (111) comparten un origen común. 18.- El sistema LIDAR de la reivindicación 15, en el que la abertura de referencia (102) es la misma que la abertura de entrada (101) , y el canal de referencia (4) y el canal de formación de imágenes (3) se derivan a partir de la misma por medio de un divisor (2) . 19.- El sistema LIDAR de la reivindicación 15, en el que la longitud de onda del oscilador de referencia (112) permanece estática y la longitud de onda del primer oscilador óptico (111) se barre siguiendo un esquema FMCW (onda continua modulada en frecuencia) convencional. 20.- El sistema LIDAR de la reivindicación 15, que comprende además uno o más filtros de paso bajo (13) , asociados a los receptores ópticos (5, 6) y destinados a filtrar la señal de interferencia y la señal de interferencia de referencia, eliminando las frecuencias muy altas. 21.- El sistema LIDAR de la reivindicación 16, que comprende adicionalmente unos amplificadores de transimpedancia (14) colocados después del receptor óptico de referencia (6) y del primer receptor óptico de formación de imágenes (5) , destinados a amplificar la componente en fase de referencia (9) , la componente en cuadratura de referencia (10) , la primera componente en fase (7) y la primera componente en cuadratura (8) . 22.- Método para suprimir el cambio de frecuencia Doppler en un sistema LIDAR, que hace uso del sistema de cualquiera de las reivindicaciones anteriores, y comprende las etapas de: - emitir una primera luz, dirigida a un objeto en movimiento, - recibir una luz reflejada procedente del objeto en movimiento, - obtener una primera señal de interferencia entre la luz reflejada y un oscilador de formación de imágenes (111) , - obtener una señal de interferencia de referencia entre la luz reflejada y un oscilador de referencia (112) , - obtener un producto de intermodulación (16) entre la señal de interferencia y la señal de interferencia de referencia, de tal manera que se cancela o disminuye el cambio de frecuencia Doppler provocado por el objeto en movimiento.
Los productos y servicios protegidos por este registro son:
G01S 17/02 - G01S 7/48
Descripciones:
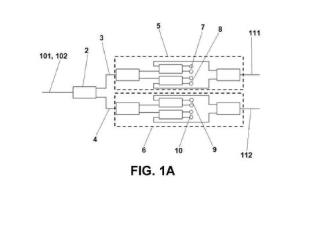
+ ES-2868473_B2 SISTEMA LIDAR CON CAMBIO DE FRECUENCIA DOPPLER SUPRIMIDO OBJETO DE LA INVENCIÓN El objeto de la invención es un sistema LIDAR que permite reducir o suprimir completamente el cambio de frecuencia inducido por el movimiento de los objetos en una escena en relación con el LIDAR, un efecto conocido como cambio de frecuencia Doppler. ANTECEDENTES DE LA INVENCIÓN Un dispositivo de detección y medición mediante luz (LIDAR, Light Detection and Ranging) crea un mapa de distancia a un objetivo iluminando el objetivo con luz láser y midiendo la luz reflejada con un sensor. Las diferencias en las propiedades de la luz láser, incluidos los tiempos totales de ida y vuelta, la fase o la longitud de onda, pueden usarse para realizar representaciones digitales en 3D del objetivo. Los LIDAR se usan comúnmente para realizar mapas de alta resolución, con aplicaciones en geodesia, geomática, arqueología, geografía, geología, geomorfología, sismología, silvicultura, física atmosférica, guía láser, mapeo por barrido láser aéreo (ALSM) y altimetría láser. La tecnología también se usa en el control y navegación para algunos vehículos autónomos. Algunos LIDAR hacen uso de lo que se conoce como detección coherente. En este esquema de detección, la luz reflejada en la muestra se mezcla con un oscilador local que es coherente con la luz reflejada. Este enfoque tiene varias ventajas, tal como la ganancia óptica que permite la sensibilidad de un solo fotón y permite el uso de cambios en la fase y la longitud de onda de la luz para medir la distancia. Un problema común que aparece al hacer uso de este tipo de LIDAR es el cambio de frecuencia inducido por el movimiento de los objetos en la escena en relación con el dispositivo, un efecto conocido como cambio de frecuencia Doppler. Tales cambios de frecuencia pueden ser grandes en relación con el ancho de banda de las señales usadas para medir las propiedades relevantes de los objetos y pueden complicar la extracción e dichos datos relevantes. El presente problema se vuelve de gran importancia si la velocidad relativa de los objetos es significativa, como en el caso de vehículos, aeronaves o satélites. Este cambio de frecuencia es variable y, a menudo, desconocido y puede ampliar el ancho de banda de las señales detectadas de manera muy significativa. En el caso de los vehículos terrestres, la velocidad relativa puede alcanzar los 300 km/h o más. Esta velocidad relativa corresponde a un cambio de frecuencia Doppler de 54, 0 MHz para la iluminación de A = 1, 55 pm. Este cambio de frecuencia variable complica la lectura electrónica y la cadena de procesamiento de señal de los sistemas que dependen de la detección coherente de la señal del objeto. Incluso si la cadena de señal aún puede manejarse para un pequeño número de canales, aumenta el coste, el tamaño y la complejidad del sistema LIDAR final. Además, plantea un obstáculo importante para la implementación práctica del sistema LIDAR coherente multicanal con una gran cantidad de entradas. Para resolver el problema explicado ha habido diversos enfoques, incluido uno de ellos que emplea un muestreo no uniforme u otros esquemas de detección comprimidos para reducir la velocidad de datos general de las señales. En general, todos los enfoques desarrollados tienen los mismos inconvenientes: circuitería de lectura electrónica compleja y cadena de procesamiento de señal general, lo que los hace caros, de gran tamaño y, en general, difíciles de implementar y escalar para arquitecturas multicanal con un gran número de canales. DESCRIPCIÓN DE LA INVENCIÓN El sistema LIDAR objeto de la presente invención describe una modificación de un sistema LIDAR coherente que hace uso de una o más aberturas de entrada, y que es simple en su implementación. Su objetivo es reducir o eliminar por completo el cambio de frecuencia inducido por el movimiento de los objetos en una escena en relación con el LIDAR, un efecto conocido como cambio de frecuencia Doppler. En la invención, la reducción o eliminación del cambio de frecuencia se realiza midiendo la señal cambiada Doppler en un canal de referencia y a continuación, haciendo uso de as propiedades matemáticas de la mezcla de señales en el dominio del tiempo, cambiar la frecuencia de uno o más canales de formación de imágenes para cancelar o reducir dicho cambio Doppler. Específicamente, el sistema de detección y medición mediante luz (LIDAR) con cambio de frecuencia Doppler suprimido de la presente invención comprende al menos una fuente de luz configurada para emitir una primera luz, dirigida a un objeto exterior. La primera luz se refleja de manera difusa o especular en el objeto y a continuación se recibe al menos en una abertura de entrada, siendo por lo tanto una luz reflejada. La luz reflejada puede dividirse en un divisor, colocado a continuación de la al menos una abertura de entrada, estando el divisor configurado para dividir la luz reflejada en un canal de referencia y al menos un primer canal de formación de imágenes. A continuación, una parte de la luz reflejada dividida se guía a través del al menos un primer canal de formación de imágenes a un primer receptor IQ óptico de formación de imágenes (en fase y en cuadratura, In-Phase Quadrature-Phase) asociado al primer canal de formación de imágenes. El primer receptor IQ óptico de formación de imágenes está configurado para obtener una primera señal de interferencia que comprende un primer componente en fase y un primer componente en cuadratura. Además, otra parte de la luz reflejada se guía a través del canal de referencia a un receptor IQ óptico de referencia asociado al canal de referencia. El receptor IQ óptico de referencia está configurado para obtener una señal de interferencia de referencia que comprende un componente en fase de referencia y un componente en cuadratura de referencia. Al menos un oscilador óptico local está asociado al primer receptor IQ óptico de formación de imágenes y al receptor IQ óptico de referencia y está configurado para ser temporalmente coherente con la luz reflejada. Por último, en una realización, el sistema comprende al menos un mezclador, conectado al primer receptor IQ óptico de formación de imágenes y al receptor IQ óptico de referencia, y configurado para obtener un primer producto de intermodulación con una frecuencia más alta y un segundo producto de intermodulación de interés en el que su cambio Doppler se escala o se elimina por completo. El sistema descrito anteriormente es una posible realización de la presente invención. Sin embargo, el sistema puede comprender una abertura de referencia y varias aberturas de entrada, o un canal de referencia y varios canales de formación de imágenes asociados a una o más aberturas de entrada. El sistema también puede comprender un único oscilador óptico local asociado a todos los receptores IQ ópticos, o un oscilador óptico local de referencia asociado al receptor IQ óptico de referencia y un oscilador óptico local de formación de imágenes asociado a los receptores IQ ópticos de referencia, o un oscilador óptico local de referencia asociado al receptor IQ óptico de referencia, y varios osciladores ópticos locales de formación de imágenes, asociados cada uno a uno o más receptores IQ ópticos de formación de imágenes. El sistema también puede comprender un modulador de amplitud y/o fase óptica aplicado a los osciladores ópticos locales de formación de imágenes, de tal manera que la generación de los productos de intermodulación se produce directamente en el fotodetector sin la necesidad de una mezcla electrónica. DESCRIPCIÓN DE LOS DIBUJOS Para complementar la descripción que se realiza y con el fin de ayudar a una mejor comprensión de las características de la invención, de acuerdo con un ejemplo preferido de una realización práctica de la misma, se adjunta un conjunto de dibujos como una parte integral de dicha descripción en la que, con carácter ilustrativo y no limitativo, se ha representado lo siguiente. Figura 1A.- Muestra un esquema de la abertura de entrada, los receptores IQ ópticos y los osciladores ópticos locales de referencia y de formación de imágenes en una realización de la invención. Figura 1B.- Muestra una implementación alternativa en la que se usan unos MMI de 2x4 para los receptores IQ ópticos. Figura 2.- Muestra un esquema del sistema LIDAR en una realización de la invención con un canal de referencia y un canal de formación de imágenes. Figura 3.- Muestra un esquema del sistema LIDAR en una realización de la invención con un canal de referencia y una matriz de canales de formación de imágenes con nformación de dirección codificada en la fase relativa entre los mismos. Figura 4.- Muestra un esquema del sistema LIDAR en una realización de la invención con una pluralidad de aberturas de entrada y un modulador de amplitud para la mezcla directa de la señal de referencia en los fotodetectores. Figura 5.-Muestra dos esquemas de una celda de Gilbert, uno que incluye los fotodetectores para permitir la multiplicación directa de la fotocorriente diferencial. Figura 6.- Muestra un esquema de integración de una celda de Gilbert, usando condensadores conmutados. REALIZACIÓN PREFERENTE DE LA INVENCIÓN Con la ayuda de las figuras 1A a 6, se describen a continuación las realizaciones preferentes de la presente invención. La invención se refiere a un sistema LIDAR que comprende al menos una fuente de luz configurada para emitir una primera luz, dirigida a un objeto exterior. La primera luz se refleja en el objeto y a continuación se recibe en una abertura de entrada de referencia (102) y en una abertura de entrada de formación de imágenes (101) en una primera realización de la invención, siendo una luz reflejada. La abertura de entrada de referencia (102) permite producir una señal de interferencia de referencia entre la luz reflejada procedente de la escena y un oscilador de referencia (112) . Esta señal de interferencia de referencia se usa para modular una señal de interferencia formada entre la luz reflejada que proviene de la escena recogida por la abertura de entrada de formación de imágenes (101) y un oscilador de formación de imágenes (111) . En cualquier implementación dada, la abertura de entrada de referencia (102) y la de la o las aberturas de entrada de imagen (101) pueden superponerse, como se muestra, por ejemplo, en la realización de la figura 1A, así como el oscilador de referencia (112) y los osciladores de formación de imágenes (111) . Es importante para la invención que el oscilador de referencia (112) y el oscilador de ormación de imágenes (111) muestren cierto grado de coherencia temporal con la luz reflejada, de tal manera que la señal de interferencia formada pueda procesarse a frecuencias eléctricas. En una implementación a modo de ejemplo, mostrada en la figura 1A, el sistema comprende una única abertura de entrada (101, 102) . En este caso, el sistema comprende una fuente de luz, que emite una luz dirigida a un objeto. La luz se refleja en el objeto y la luz reflejada, que entra al sistema por la abertura de entrada (101, 102) se divide en un primer canal de formación de imágenes (3) y un canal de referencia (4) por un divisor de 1x2 (2) . Es importante para la invención que los al menos dos canales, el canal de referencia (4) y el primer canal de formación de imágenes (3) , se vean afectados por el movimiento de los objetos a través del cambio de frecuencia Doppler sustancialmente de la misma manera, mientras que la modulación portadora de información no Doppler permanece diferente entre los mismos. Esto permite combinarlos de tal manera que el cambio de frecuencia Doppler se elimine o se reduzca en gran medida, mientras se recupera la modulación portadora de información. Como se muestra en la figura 1A, el primer canal de formación de imágenes (3) se alimenta a un primer receptor IQ óptico de formación de imágenes (5) , y el canal de referencia (4) se alimenta a un receptor IQ óptico de referencia (6) . El primer receptor óptico de formación de imágenes (5) está asociado a un oscilador de formación de imágenes (111) y el receptor óptico de referencia (6) está asociado a un oscilador de referencia (112) . Dentro de los receptores IQ ópticos (5, 6) , ambos osciladores (111, 112) se alimentan a través de híbridos de 90° que generan el cambio de fase necesario entre el componente en fase (7, 9) y el componente en cuadratura (8, 10) de cada canal. En otras realizaciones, los receptores IQ (5, 6) podrían implementarse por medio de acopladores MMI (Multi Mode Interference, Interferencia Multi Modo) de 2x4 diseñados para proporcionar los cambios de fase requeridos entre las 4 salidas (7, 8, 9, 10) y cada una de las dos entradas (3, 4) . En la figura 1B se muestra una realización en la que el primer receptor IQ óptico de formación de imágenes (5) es un acoplador MMI de 2x4 que se alimenta con el primer canal de formación de imágenes (3) y un oscilador de formación de imágenes (111) , y el receptor IQ óptico de referencia (6) es un acoplador MMI de 2x4 que se alimenta con el canal de referencia (4) y un oscilador de referencia (112) . En una realización, el oscilador de formación de imágenes (111) tiene su longitud de onda barrida que sigue un esquema FMCW (onda continua modulada en frecuencia, Frequency Modulated Continuous Wave) convencional y el oscilador de referencia (112) mantiene su longitud de onda estática. Para que esta implementación funcione, es importante que la luz reflejada tenga componentes que sean coherentes con ambos componentes en los osciladores (111, 112) . Para esto, la iluminación debe derivarse a partir de una combinación de ambos componentes, o ambos componentes deben compartir un origen común con la iluminación que garantice la coherencia mutua. El primer receptor IQ óptico de formación de imágenes (5) está asociado al primer canal de formación de imágenes (3) y está configurado para obtener una primera señal de interferencia que comprende un primer componente en fase (7) y un primer componente en cuadratura (8) . El receptor IQ óptico de referencia (6) está asociado al canal de referencia (4) y configurado para obtener una señal de interferencia de referencia que comprende un componente en fase de referencia (9) y un componente en cuadratura de referencia (10) . Ambas señales de interferencia se verán afectadas por el efecto Doppler sustancialmente de la misma manera (con pequeñas diferencias debido a las diferentes longitudes de onda, en algunas realizaciones) . Sin embargo, solo la primera señal de interferencia, asociada al oscilador de formación de imágenes (111) , transporta información sobre la distancia del objeto al sistema LIDAR en su frecuencia de interferencia. La mezcla de ambas señales, la primera señal de interferencia y la señal de referencia, en al menos un mezclador (12) , da como resultado la generación de dos productos de intermodulación: un primer producto de intermodulación con mayor frecuencia que puede descartarse, y un producto de intermodulación de salida (16) con menor frecuencia, que tiene su cambio Doppler escalado significativamente, y que proporciona la posibilidad de llevar la información de medición y amplitud a la banda base, y de este modo minimizar la frecuencia de muestreo y la complejidad de lectura electrónica. Por ejemplo, a continuación se derivan la primera señal de interferencia y la señal de interferencia de referencia para esta implementación. Se supone que la abertura de ntrada de formación de imágenes (101) y la abertura de referencia (102) están sustancialmente en la misma posición, excepto por posibles cambios de fase relativos si la abertura de entrada de formación de imágenes (101) es parte de una matriz. En el caso de una iluminación igual de la escena con dos fuentes de luz de dos longitudes de onda (con números de onda asociados y frecuencias angulares k1, k 2 y &>2> respectivamente) e igual amplitud A, la señal de luz a una distancia x de la fuente de luz es: donde se supone que la primera longitud de onda de la primera fuente de luz del sistema LIDAR se somete a una modulación de frecuencia lineal con constante K. Si el objeto que refleja la luz emitida por la primera fuente de luz es un único reflector difuso, el objeto, a una distancia x¡ con reflectividad de intensidad p¡ en la dirección de la abertura de entrada (101) y la velocidad relativa en la dirección entre la abertura de entrada (101) y el objeto v j, el campo reflejado de la luz recogida en la abertura de entrada (101) será: dónde í es el índice de la apertura de entrada en el caso de que haya una matriz de los mismos. El cambio Doppler es visible en los términos 2k1vj y 2k2vj en las ecuaciones, modificando la frecuencia de la luz reflejada. Para el cálculo de las señales de interferencia en los receptores IQ ópticos (5, 6) , se supone por simplicidad que los dos componentes de longitud de onda de los osciladores de referencia y de formación de imágenes (111, 112) tienen una amplitud de unidad: E X i ( t ) = [ e - j ( ^ i t + n K t 2+ ^ 1) ] Ex2 (t) = e -AW2t + 02) después del receptor IQ óptico de formación de imágenes (5) y el receptor IQ óptico de referencia (6) , la primera señal de interferencia y la señal de interferencia de referencia son, respectivamente: En estos, los productos de batido donde persiste la diferencia de frecuencias angulares ópticas estarán en una frecuencia muy alta para los estándares eléctricos una vez detectados. Por ejemplo, suponiendo que las dos longitudes de onda de la luz de las fuentes de luz están separadas 0, 1 nm a una longitud de onda de 1, 55 pm, el producto de intermodulación tiene una frecuencia de 12, 5 GHz: por el contrario, los productos de batido donde el oscilador local y las frecuencias de luz reflejada son iguales, se demodulan a una frecuencia más baja, derivada a partir de la diferencia de frecuencia entre la frecuencia de modulación de fase emitida y recibida más o menos el cambio Doppler. Para la velocidad típica de los vehículos terrestres, el cambio Doppler será igual o inferior a 100 MHz, por lo que es posible suprimir los términos de mezcla de frecuencias más altas (aquellos que incluyen la diferencia de las frecuencias angulares ópticas) por medio de un filtro de paso bajo. Por lo tanto, como se muestra en la figura 2, puede asociarse un primer conjunto de filtros de paso bajo (13) a los receptores IQ ópticos (5, 6) con el fin de filtrar el primer componente en fase (7) , el primer componente en cuadratura (8) , el componente en fase de referencia (9) y el componente en cuadratura de referencia (10) . A continuación, solo nos centraremos en las componentes de baja frecuencia de las señales de interferencia: La información de profundidad y velocidad está codificada en la frecuencia (y fase) de ambas fotocorrientes. Si nos centramos solo en la información de frecuencia, vemos que las frecuencias de It (t) y /2 (t) son: los componentes de estos dos cambios de frecuencia se escalan de manera diferente con la velocidad de línea. La constante de modulación K tiene un impacto directo en la distancia-frecuencias derivadas. Sin embargo, el cambio Doppler permanece independiente y está determinado únicamente por las propiedades de la escena. Ya que el cambio Doppler puede subir a frecuencias de varias decenas de MHz, requiere una electrónica de adquisición rápida, lo que puede sumarse al coste del sistema. Estas frecuencias de video también son un problema cuando se trata de ampliar la detección de escena con múltiples canales de formación de imágenes paralelos (3) . Sin embargo, observamos que la diferencia de estas dos frecuencias es: si las dos longitudes de onda de las luces emitidas por las dos fuentes de luz se eligen para estar cerca una de otra (por ejemplo, una separación de 0, 1 nma una longitud de onda de 1, 55 pm) , la diferencia de los cambios de frecuencia Doppler se reduce significativamente (2 kHz para una v¡ de 50m /s) . Sin embargo, es digno de mención que ambas longitudes de onda pueden ser iguales. En este caso, el cambio Doppler se suprime totalmente, mientras que se conserva el cambio de frecuencia debido a FMCW. Este enfoque simplifica el sistema óptico necesario y la circuitería electro-óptica asociada. Si ambas longitudes de onda son iguales, el cambio Doppler se suprime totalmente y la frecuencia de la señal se mueve a la banda base. Esta frecuencia Doppler más baja permite una reducción significativa de la velocidad de línea, el rendimiento de datos y la complejidad del hardware en sistemas donde se desea una gran cantidad de aperturas de entrada (101) . Si la frecuencia Doppler se conserva y debe medirse, es necesario que haya una manera de eliminar la ambigüedad del cambio Doppler de la modulación FMCW. Una forma de lograr esto es cambiar K en el barrido de frecuencia FMCW a lo largo del tiempo, por ejemplo, alternando su signo, y comparando los cambios de frecuencia eléctrica resultantes entre ambas pendientes de modulación. Una forma de restar las frecuencias obtenidas a partir de los receptores IQ ópticos (5, 6) anteriores es multiplicar una de las corrientes con el conjugado complejo del otro. Pueden aplicarse técnicas de mezcla de frecuencias convencionales. Esto puede hacerse en el dominio digital o analógico y potencialmente sobre la base de las señales de interferencia como se indica a continuación: f i ( 0 * ^ ( 0 Un * hí + hq * hq) + i Un * hq hq * hí) en una realización, esto puede implementarse, como se muestra en la figura 2, usando uno o más mezcladores (12) conectados al primer IQ óptico de formación de imágenes (5) y a las salidas IQ ópticas de referencia (6) o a las primeras salidas del conjunto de filtros de paso bajo (13) . Cada uno de los cuatro términos multiplicativos anteriores contiene un primer producto de intermodulación con la diferencia de frecuencias A / (baja frecuencia) y un segundo producto de intermodulación que incluye la adición de las frecuencias Doppler 2v¡ ( + ) . Cuando se combinan los cuatro términos multiplicativos, los términos relacionados con la adición de frecuencias Doppler se cancelan, y solo los productos de intermodulación de baja frecuencia, que contienen la información de profundidad en su frecuencia (como por A / anterior) , permanecen como productos de intermodulación de salida (16) . Alternativamente, como alternativa, se puede filtrar el componente de frecuencia más alta de cada uno de los términos multiplicativos usando un segundo conjunto de filtros de paso bajo (23) y mantener solo los productos de intermodulación de baja frecuencia, que contienen la información de profundidad en su frecuencia (como por A f anterior) , omo productos de intermodulación de salida (16) . En la realización mostrada en la figura 2, el o los mezcladores (12) comprenden: - un primer mezclador (121) , destinado a mezclar el primer componente en cuadratura (8) y el componente en fase de referencia (9) , proporcionando el término multiplicativo (Ilq * l 2i) , y - un segundo mezclador (122) , destinado a mezclar el primer componente en fase (7) y el componente en fase de referencia (9) , proporcionando el término multiplicativo (71 * I2i) . En una técnica de demodulación alternativa, puede trabajarse con los componentes individuales de las señales de interferencia, es decir, el primer componente en fase (7) , el primer componente en cuadratura (8) y las derivadas de las señales de interferencia de referencia, como se proporciona por un módulo de derivación de tiempo (15) : la derivada en tiempo del componente en fase de referencia (90) y la derivada en tiempo del componente en cuadratura de referencia (91) , y adaptarse las técnicas de demodulación de FM que realizan simultáneamente la conversión y demodulación de banda base. Esto puede ser específicamente útil en realizaciones donde sean iguales tanto el oscilador de formación de imágenes como el oscilador de referencia, ya que en esa situación la diferencia de frecuencia en los términos multiplicativos como se expresó anteriormente sería A f = 0, y el uso de derivadas en tiempo permite extraer la información de profundidad codificada en frecuencia para la amplitud de las señales derivadas en tiempo. Por ejemplo, la operación que puede realizarse en uno o más mezcladores (12) en este caso, en el que el oscilador de formación de imágenes y de referencia son el mismo, es: I lQ ÍO h / ( O - I iÁ O h q íO = p jA ÍX jft [2k1Vj + 2 ? eos (0 ) ¡u íO h / (O - I iQ (t) I2Q (t) = p ] A ( x j [2k1v¡ + 2 ? si n (0) de manera similar al enfoque de mezcla de frecuencia directa, en este caso pueden generarse los cuatro términos multiplicativos anteriores y combinarlos para dejar solo el componente de CC, o como alternativa puede filtrarse el componente de frecuencia más lta de cada uno de los términos multiplicativos usando un segundo conjunto de filtros de paso bajo (23) y mantener solo los componentes de CC que contienen la información de profundidad y Doppler en su amplitud. Para separar la información Doppler y de profundidad, puede cambiarse K en el barrido de frecuencia FMCW a lo largo del tiempo, por ejemplo, alternando su signo, y comparando los cambios de componentes de CC resultantes entre ambas pendientes de modulación. Un inconveniente de la demodulación de FM directa es el hecho de que la reflectividad del objeto (pj) y el cambio de frecuencia se mezclan en este valor de CC. Esto puede abordarse demodulando la amplitud por separado: como alternativa, en los casos donde los osciladores de formación de imágenes y de referencia son el mismo, la reflectividad del objeto puede obtenerse también a partir de los términos multiplicativos entre los componentes de señal y los componentes de referencia antes de la derivada en tiempo (por ejemplo, como se proporciona por el primer mezclador (121) y el segundo mezclador (122) en la figura 2) . Para el uso del enfoque de demodulación de FM directa, en la figura 2 se muestra un módulo de derivación de tiempo (15) y uno o más mezcladores que comprenden: - un tercer mezclador (123) , destinado a mezclar el primer componente en fase (7) y el componente en cuadratura de referencia derivado en tiempo (91) , y - un cuarto mezclador (124) , destinado a mezclar el primer componente en cuadratura (8) y el componente en cuadratura de referencia derivado en tiempo (91) . Por lo tanto, la realización en la figura 2 muestra un esquema de demodulación que proporciona demodulación de frecuencia y amplitud simultáneamente. La figura 3 muestra una implementación donde se combinan múltiples canales de formación de imágenes (3) con un canal de referencia común (4) obtenido a partir de una luz reflejada que proviene de la misma escena, pero mezclada con una fuente óptica separada (una de una longitud de onda diferente pero que es coherente con al menos na fracción de la potencia recogida de la escena) . La ventaja del esquema mostrado en la figura 3 es que los diferentes canales de formación de imágenes (3) conservan la diferencia de fase relativa (contenida en los datos IQ) en el dominio eléctrico después de la demodulación. Esto permite la combinación coherente de las señales demoduladas que provienen de dichos canales de formación de imágenes (3) con el fin de recuperar las diferentes direcciones. Para los mezcladores (12) , es posible usar diferentes esquemas de construcción. En particular, pueden implementarse en el dominio analógico sobre la base de circuitos que se basan en un esquema translineal. Uno de estos circuitos es la celda de Gilbert, que se representa en la figura 5. Este circuito tiene la ventaja de funcionar en los cuatro cuadrantes de las señales de interferencia. Ya que las entradas a la celda son siempre diferenciales y basadas en la tensión, las fotocorrientes provenientes de los receptores IQ ópticos (5, 6) anteriores deben amplificarse mediante un amplificador de transimpedancia (14) a una tensión y, si corresponde, derivarse en el dominio analógico. Esto suma complejidad a la circuitería y hace que el esquema sea más difícil de implementar cuando aumenta el número de canales. Con el fin de simplificar la celda de Gilbert, es posible usar las fotocorrientes de un par diferencial equilibrado como fuente tanto de señales de entrada como de polarización de corriente. Esto reducirá la necesidad de amplificadores de transimpedancia intermedios y hará que la celda sea más susceptible de replicación para lograr una integración a gran escala. El oscilador de formación de imágenes (111) para mezclar con los diferentes canales de imagen (3, 4) puede generarse y distribuirse como una señal de tensión sobre la matriz de detección desde una sola abertura de entrada de formación de imágenes (101) sin mayores problemas de escalabilidad. Para simplificar la lectura de la celda, pueden aplicarse esquemas de integración con condensadores conmutados y salidas de video multiplexadas como se muestra en la figura 6. La lectura de dichos condensadores conmutados puede estructurarse de la misma manera que los sensores de formación de imágenes normales, organizándolos por columna y usando los esquemas de multiplexación habituales para encaminar los valores analógicos a la circuitería ADC apropiada. Por último, con el fin de proporcionar la función de mezcla deseada, también es posible modular la amplitud del oscilador local óptico que va a los canales de formación de imágenes. Si se hace esto, no se requiere una mezcla electrónica después de la fotodetección, con ventajas obvias en términos de complejidad del sistema. Para esto, puede usarse un modulador óptico (17) , como se muestra en la figura 4. En una realización, el modulador óptico (17) es un modulador de amplitud óptica, ya sea basado en absorción electroóptica, en un interferómetro Mach-Zehnder o de otro modo. Si la modulación de amplitud deja cierto nivel de modulación de fase, puede agregarse un modulador de fase en serie para garantizar una operación de fase constante y evitar cambios de frecuencia no deseados en el canal de referencia. La modulación de amplitud también puede obtenerse de diferentes maneras, como a través de un amplificador óptico, la modulación de una corriente láser, etc. En algunas realizaciones, el primer componente en fase (7) , el primer componente en cuadratura (8) , el componente en fase de referencia (9) y el componente en cuadratura de referencia (10) necesitarían multiplicarse con diferentes versiones de la señal, cambiadas 90° entre sí con el fin de lograr el resultado matemático deseado directamente. Para lograr esto físicamente, esto requeriría la distribución de señales de referencia moduladas por separado a cada mezclador de salida (12) . Aunque es posible, esto complicaría el diseño y el encaminamiento de señal en el dispositivo, especialmente debido a que la relación de fase entre ambos osciladores ópticos de referencia modulados debe determinarse con precisión. Sin embargo, dado el hecho de que la modulación a aplicar a estos dos canales también es ortogonal en el dominio eléctrico, es posible, en algunas realizaciones, sumarlos juntos en la señal de modulación, como se muestra en la figura 4. Los productos entre el primer componente en fase (7) y el primer componente en cuadratura (8) o entre el componente en fase de referencia (9) y el componente en cuadratura de referencia (10) solo producen productos de intermodulación de alta frecuencia que pueden estar en principio filtrados. Con el fin de separar la información de amplitud y distancia, es posible conmutar la señal de modulación aplicada al modulador óptico (17) entre diferentes modos (con o sin derivada en tiempo) de tal manera que como alternativa se recupere la información de rofundidad y/o la amplitud de señal. Esta simple multiplexación en el dominio de tiempo, que es adecuada para su implementación con un integrador que está sincronizado con la conmutación de la señal de demodulación, también puede reemplazarse por otros esquemas de multiplexación (multiplexación de dominio de frecuencia, multiplexación de código, etc.) . La figura 4 muestra la combinación de las dos opciones de implementación descritas anteriormente, la demodulación de frecuencia Doppler por medio de la modulación de amplitud de la señal de referencia óptica y la multiplexación de tiempo de la demodulación de amplitud/frecuencia, para el caso de una única longitud de onda.
+ ES-2868473_A1 SISTEMA LIDAR CON CAMBIO DE FRECUENCIA DOPPLER SUPRIMIDO OBJETO DE LA INVENCIÓN El objeto de la invención es un sistema LIDAR que permite reducir o suprimir completamente el cambio de frecuencia inducido por el movimiento de los objetos en una escena en relación con el LIDAR, un efecto conocido como cambio de frecuencia Doppler. ANTECEDENTES DE LA INVENCIÓN Un dispositivo de detección y medición mediante luz (LIDAR, Light Detection and Ranging) crea un mapa de distancia a un objetivo iluminando el objetivo con luz láser y midiendo la luz reflejada con un sensor. Las diferencias en las propiedades de la luz láser, incluidos los tiempos totales de ida y vuelta, la fase o la longitud de onda, pueden usarse para realizar representaciones digitales en 3D del objetivo. Los LIDAR se usan comúnmente para realizar mapas de alta resolución, con aplicaciones en geodesia, geomática, arqueología, geografía, geología, geomorfología, sismología, silvicultura, física atmosférica, guía láser, mapeo por barrido láser aéreo (ALSM) y altimetría láser. La tecnología también se usa en el control y navegación para algunos vehículos autónomos. Algunos LIDAR hacen uso de lo que se conoce como detección coherente. En este esquema de detección, la luz reflejada en la muestra se mezcla con un oscilador local que es coherente con la luz reflejada. Este enfoque tiene varias ventajas, tal como la ganancia óptica que permite la sensibilidad de un solo fotón y permite el uso de cambios en la fase y la longitud de onda de la luz para medir la distancia. Un problema común que aparece al hacer uso de este tipo de LIDAR es el cambio de frecuencia inducido por el movimiento de los objetos en la escena en relación con el dispositivo, un efecto conocido como cambio de frecuencia Doppler. Tales cambios de frecuencia pueden ser grandes en relación con el ancho de banda de las señales usadas para medir las propiedades relevantes de los objetos y pueden complicar la extracción e dichos datos relevantes. El presente problema se vuelve de gran importancia si la velocidad relativa de los objetos es significativa, como en el caso de vehículos, aeronaves o satélites. Este cambio de frecuencia es variable y, a menudo, desconocido y puede ampliar el ancho de banda de las señales detectadas de manera muy significativa. En el caso de los vehículos terrestres, la velocidad relativa puede alcanzar los 300 km/h o más. Esta velocidad relativa corresponde a un cambio de frecuencia Doppler de 54, 0 MHz para la iluminación de A = 1, 55 pm. Este cambio de frecuencia variable complica la lectura electrónica y la cadena de procesamiento de señal de los sistemas que dependen de la detección coherente de la señal del objeto. Incluso si la cadena de señal aún puede manejarse para un pequeño número de canales, aumenta el coste, el tamaño y la complejidad del sistema LIDAR final. Además, plantea un obstáculo importante para la implementación práctica del sistema LIDAR coherente multicanal con una gran cantidad de entradas. Para resolver el problema explicado ha habido diversos enfoques, incluido uno de ellos que emplea un muestreo no uniforme u otros esquemas de detección comprimidos para reducir la velocidad de datos general de las señales. En general, todos los enfoques desarrollados tienen los mismos inconvenientes: circuitería de lectura electrónica compleja y cadena de procesamiento de señal general, lo que los hace caros, de gran tamaño y, en general, difíciles de implementar y escalar para arquitecturas multicanal con un gran número de canales. DESCRIPCIÓN DE LA INVENCIÓN El sistema LIDAR objeto de la presente invención describe una modificación de un sistema LIDAR coherente que hace uso de una o más aberturas de entrada, y que es simple en su implementación. Su objetivo es reducir o eliminar por completo el cambio de frecuencia inducido por el movimiento de los objetos en una escena en relación con el LIDAR, un efecto conocido como cambio de frecuencia Doppler. En la invención, la reducción o eliminación del cambio de frecuencia se realiza midiendo la señal cambiada Doppler en un canal de referencia y a continuación, haciendo uso de as propiedades matemáticas de la mezcla de señales en el dominio del tiempo, cambiar la frecuencia de uno o más canales de formación de imágenes para cancelar o reducir dicho cambio Doppler. Específicamente, el sistema de detección y medición mediante luz (LIDAR) con cambio de frecuencia Doppler suprimido de la presente invención comprende al menos una fuente de luz configurada para emitir una primera luz, dirigida a un objeto exterior. La primera luz se refleja de manera difusa o especular en el objeto y a continuación se recibe al menos en una abertura de entrada, siendo por lo tanto una luz reflejada. La luz reflejada puede dividirse en un divisor, colocado a continuación de la al menos una abertura de entrada, estando el divisor configurado para dividir la luz reflejada en un canal de referencia y al menos un primer canal de formación de imágenes. A continuación, una parte de la luz reflejada dividida se guía a través del al menos un primer canal de formación de imágenes a un primer receptor IQ óptico de formación de imágenes (en fase y en cuadratura, In-Phase Quadrature-Phase) asociado al primer canal de formación de imágenes. El primer receptor IQ óptico de formación de imágenes está configurado para obtener una primera señal de interferencia que comprende un primer componente en fase y un primer componente en cuadratura. Además, otra parte de la luz reflejada se guía a través del canal de referencia a un receptor IQ óptico de referencia asociado al canal de referencia. El receptor IQ óptico de referencia está configurado para obtener una señal de interferencia de referencia que comprende un componente en fase de referencia y un componente en cuadratura de referencia. Al menos un oscilador óptico local está asociado al primer receptor IQ óptico de formación de imágenes y al receptor IQ óptico de referencia y está configurado para ser temporalmente coherente con la luz reflejada. Por último, en una realización, el sistema comprende al menos un mezclador, conectado al primer receptor IQ óptico de formación de imágenes y al receptor IQ óptico de referencia, y configurado para obtener un primer producto de intermodulación con una frecuencia más alta y un segundo producto de intermodulación de interés en el que su cambio Doppler se escala o se elimina por completo. El sistema descrito anteriormente es una posible realización de la presente invención. Sin embargo, el sistema puede comprender una abertura de referencia y varias aberturas de entrada, o un canal de referencia y varios canales de formación de imágenes asociados a una o más aberturas de entrada. El sistema también puede comprender un único oscilador óptico local asociado a todos los receptores IQ ópticos, o un oscilador óptico local de referencia asociado al receptor IQ óptico de referencia y un oscilador óptico local de formación de imágenes asociado a los receptores IQ ópticos de referencia, o un oscilador óptico local de referencia asociado al receptor IQ óptico de referencia, y varios osciladores ópticos locales de formación de imágenes, asociados cada uno a uno o más receptores IQ ópticos de formación de imágenes. El sistema también puede comprender un modulador de amplitud y/o fase óptica aplicado a los osciladores ópticos locales de formación de imágenes, de tal manera que la generación de los productos de intermodulación se produce directamente en el fotodetector sin la necesidad de una mezcla electrónica. DESCRIPCIÓN DE LOS DIBUJOS Para complementar la descripción que se realiza y con el fin de ayudar a una mejor comprensión de las características de la invención, de acuerdo con un ejemplo preferido de una realización práctica de la misma, se adjunta un conjunto de dibujos como una parte integral de dicha descripción en la que, con carácter ilustrativo y no limitativo, se ha representado lo siguiente. Figura 1A.- Muestra un esquema de la abertura de entrada, los receptores IQ ópticos y los osciladores ópticos locales de referencia y de formación de imágenes en una realización de la invención. Figura 1B.- Muestra una implementación alternativa en la que se usan unos MMI de 2x4 para los receptores IQ ópticos. Figura 2.- Muestra un esquema del sistema LIDAR en una realización de la invención con un canal de referencia y un canal de formación de imágenes. Figura 3.- Muestra un esquema del sistema LIDAR en una realización de la invención con un canal de referencia y una matriz de canales de formación de imágenes con nformación de dirección codificada en la fase relativa entre los mismos. Figura 4.- Muestra un esquema del sistema LIDAR en una realización de la invención con una pluralidad de aberturas de entrada y un modulador de amplitud para la mezcla directa de la señal de referencia en los fotodetectores. Figura 5.-Muestra dos esquemas de una celda de Gilbert, uno que incluye los fotodetectores para permitir la multiplicación directa de la fotocorriente diferencial. Figura 6.- Muestra un esquema de integración de una celda de Gilbert, usando condensadores conmutados. REALIZACIÓN PREFERENTE DE LA INVENCIÓN Con la ayuda de las figuras 1A a 6, se describen a continuación las realizaciones preferentes de la presente invención. La invención se refiere a un sistema LIDAR que comprende al menos una fuente de luz configurada para emitir una primera luz, dirigida a un objeto exterior. La primera luz se refleja en el objeto y a continuación se recibe en una abertura de entrada de referencia (102) y en una abertura de entrada de formación de imágenes (101) en una primera realización de la invención, siendo una luz reflejada. La abertura de entrada de referencia (102) permite producir una señal de interferencia de referencia entre la luz reflejada procedente de la escena y un oscilador de referencia (112) . Esta señal de interferencia de referencia se usa para modular una señal de interferencia formada entre la luz reflejada que proviene de la escena recogida por la abertura de entrada de formación de imágenes (101) y un oscilador de formación de imágenes (111) . En cualquier implementación dada, la abertura de entrada de referencia (102) y la de la o las aberturas de entrada de imagen (101) pueden superponerse, como se muestra, por ejemplo, en la realización de la figura 1A, así como el oscilador de referencia (112) y los osciladores de formación de imágenes (111) . Es importante para la invención que el oscilador de referencia (112) y el oscilador de ormación de imágenes (111) muestren cierto grado de coherencia temporal con la luz reflejada, de tal manera que la señal de interferencia formada pueda procesarse a frecuencias eléctricas. En una implementación a modo de ejemplo, mostrada en la figura 1A, el sistema comprende una única abertura de entrada (101, 102) . En este caso, el sistema comprende una fuente de luz, que emite una luz dirigida a un objeto. La luz se refleja en el objeto y la luz reflejada, que entra al sistema por la abertura de entrada (101, 102) se divide en un primer canal de formación de imágenes (3) y un canal de referencia (4) por un divisor de 1x2 (2) . Es importante para la invención que los al menos dos canales, el canal de referencia (4) y el primer canal de formación de imágenes (3) , se vean afectados por el movimiento de los objetos a través del cambio de frecuencia Doppler sustancialmente de la misma manera, mientras que la modulación portadora de información no Doppler permanece diferente entre los mismos. Esto permite combinarlos de tal manera que el cambio de frecuencia Doppler se elimine o se reduzca en gran medida, mientras se recupera la modulación portadora de información. Como se muestra en la figura 1A, el primer canal de formación de imágenes (3) se alimenta a un primer receptor IQ óptico de formación de imágenes (5) , y el canal de referencia (4) se alimenta a un receptor IQ óptico de referencia (6) . El primer receptor óptico de formación de imágenes (5) está asociado a un oscilador de formación de imágenes (111) y el receptor óptico de referencia (6) está asociado a un oscilador de referencia (112) . Dentro de los receptores IQ ópticos (5, 6) , ambos osciladores (111, 112) se alimentan a través de híbridos de 90° que generan el cambio de fase necesario entre el componente en fase (7, 9) y el componente en cuadratura (8, 10) de cada canal. En otras realizaciones, los receptores IQ (5, 6) podrían implementarse por medio de acopladores MMI (Multi Mode Interference, Interferencia Multi Modo) de 2x4 diseñados para proporcionar los cambios de fase requeridos entre las 4 salidas (7, 8, 9, 10) y cada una de las dos entradas (3, 4) . En la figura 1B se muestra una realización en la que el primer receptor IQ óptico de formación de imágenes (5) es un acoplador MMI de 2x4 que se alimenta con el primer canal de formación de imágenes (3) y un oscilador de formación de imágenes (111) , y el receptor IQ óptico de referencia (6) es un acoplador MMI de 2x4 que se alimenta con el canal de referencia (4) y un oscilador de referencia (112) . En una realización, el oscilador de formación de imágenes (111) tiene su longitud de onda barrida que sigue un esquema FMCW (onda continua modulada en frecuencia, Frequency Modulated Continuous Wave) convencional y el oscilador de referencia (112) mantiene su longitud de onda estática. Para que esta implementación funcione, es importante que la luz reflejada tenga componentes que sean coherentes con ambos componentes en los osciladores (111, 112) . Para esto, la iluminación debe derivarse a partir de una combinación de ambos componentes, o ambos componentes deben compartir un origen común con la iluminación que garantice la coherencia mutua. El primer receptor IQ óptico de formación de imágenes (5) está asociado al primer canal de formación de imágenes (3) y está configurado para obtener una primera señal de interferencia que comprende un primer componente en fase (7) y un primer componente en cuadratura (8) . El receptor IQ óptico de referencia (6) está asociado al canal de referencia (4) y configurado para obtener una señal de interferencia de referencia que comprende un componente en fase de referencia (9) y un componente en cuadratura de referencia (10) . Ambas señales de interferencia se verán afectadas por el efecto Doppler sustancialmente de la misma manera (con pequeñas diferencias debido a las diferentes longitudes de onda, en algunas realizaciones) . Sin embargo, solo la primera señal de interferencia, asociada al oscilador de formación de imágenes (111) , transporta información sobre la distancia del objeto al sistema LIDAR en su frecuencia de interferencia. La mezcla de ambas señales, la primera señal de interferencia y la señal de referencia, en al menos un mezclador (12) , da como resultado la generación de dos productos de intermodulación: un primer producto de intermodulación con mayor frecuencia que puede descartarse, y un producto de intermodulación de salida (16) con menor frecuencia, que tiene su cambio Doppler escalado significativamente, y que proporciona la posibilidad de llevar la información de medición y amplitud a la banda base, y de este modo minimizar la frecuencia de muestreo y la complejidad de lectura electrónica. Por ejemplo, a continuación se derivan la primera señal de interferencia y la señal de interferencia de referencia para esta implementación. Se supone que la abertura de ntrada de formación de imágenes (101) y la abertura de referencia (102) están sustancialmente en la misma posición, excepto por posibles cambios de fase relativos si la abertura de entrada de formación de imágenes (101) es parte de una matriz. En el caso de una iluminación igual de la escena con dos fuentes de luz de dos longitudes de onda (con números de onda asociados y frecuencias angulares k1, k 2 y &>2> respectivamente) e igual amplitud A, la señal de luz a una distancia x de la fuente de luz es: donde se supone que la primera longitud de onda de la primera fuente de luz del sistema LIDAR se somete a una modulación de frecuencia lineal con constante K. Si el objeto que refleja la luz emitida por la primera fuente de luz es un único reflector difuso, el objeto, a una distancia x¡ con reflectividad de intensidad p¡ en la dirección de la abertura de entrada (101) y la velocidad relativa en la dirección entre la abertura de entrada (101) y el objeto v j, el campo reflejado de la luz recogida en la abertura de entrada (101) será: dónde í es el índice de la apertura de entrada en el caso de que haya una matriz de los mismos. El cambio Doppler es visible en los términos 2k1vj y 2k2vj en las ecuaciones, modificando la frecuencia de la luz reflejada. Para el cálculo de las señales de interferencia en los receptores IQ ópticos (5, 6) , se supone por simplicidad que los dos componentes de longitud de onda de los osciladores de referencia y de formación de imágenes (111, 112) tienen una amplitud de unidad: E X i ( t ) = [ e - j ( ^ i t + n K t 2+ ^ 1) ] Ex2 (t) = e -AW2t + 02) después del receptor IQ óptico de formación de imágenes (5) y el receptor IQ óptico de referencia (6) , la primera señal de interferencia y la señal de interferencia de referencia son, respectivamente: En estos, los productos de batido donde persiste la diferencia de frecuencias angulares ópticas estarán en una frecuencia muy alta para los estándares eléctricos una vez detectados. Por ejemplo, suponiendo que las dos longitudes de onda de la luz de las fuentes de luz están separadas 0, 1 nm a una longitud de onda de 1, 55 pm, el producto de intermodulación tiene una frecuencia de 12, 5 GHz: por el contrario, los productos de batido donde el oscilador local y las frecuencias de luz reflejada son iguales, se demodulan a una frecuencia más baja, derivada a partir de la diferencia de frecuencia entre la frecuencia de modulación de fase emitida y recibida más o menos el cambio Doppler. Para la velocidad típica de los vehículos terrestres, el cambio Doppler será igual o inferior a 100 MHz, por lo que es posible suprimir los términos de mezcla de frecuencias más altas (aquellos que incluyen la diferencia de las frecuencias angulares ópticas) por medio de un filtro de paso bajo. Por lo tanto, como se muestra en la figura 2, puede asociarse un primer conjunto de filtros de paso bajo (13) a los receptores IQ ópticos (5, 6) con el fin de filtrar el primer componente en fase (7) , el primer componente en cuadratura (8) , el componente en fase de referencia (9) y el componente en cuadratura de referencia (10) . A continuación, solo nos centraremos en las componentes de baja frecuencia de las señales de interferencia: La información de profundidad y velocidad está codificada en la frecuencia (y fase) de ambas fotocorrientes. Si nos centramos solo en la información de frecuencia, vemos que las frecuencias de It (t) y /2 (t) son: los componentes de estos dos cambios de frecuencia se escalan de manera diferente con la velocidad de línea. La constante de modulación K tiene un impacto directo en la distancia-frecuencias derivadas. Sin embargo, el cambio Doppler permanece independiente y está determinado únicamente por las propiedades de la escena. Ya que el cambio Doppler puede subir a frecuencias de varias decenas de MHz, requiere una electrónica de adquisición rápida, lo que puede sumarse al coste del sistema. Estas frecuencias de video también son un problema cuando se trata de ampliar la detección de escena con múltiples canales de formación de imágenes paralelos (3) . Sin embargo, observamos que la diferencia de estas dos frecuencias es: si las dos longitudes de onda de las luces emitidas por las dos fuentes de luz se eligen para estar cerca una de otra (por ejemplo, una separación de 0, 1 nma una longitud de onda de 1, 55 pm) , la diferencia de los cambios de frecuencia Doppler se reduce significativamente (2 kHz para una v¡ de 50m /s) . Sin embargo, es digno de mención que ambas longitudes de onda pueden ser iguales. En este caso, el cambio Doppler se suprime totalmente, mientras que se conserva el cambio de frecuencia debido a FMCW. Este enfoque simplifica el sistema óptico necesario y la circuitería electro-óptica asociada. Si ambas longitudes de onda son iguales, el cambio Doppler se suprime totalmente y la frecuencia de la señal se mueve a la banda base. Esta frecuencia Doppler más baja permite una reducción significativa de la velocidad de línea, el rendimiento de datos y la complejidad del hardware en sistemas donde se desea una gran cantidad de aperturas de entrada (101) . Si la frecuencia Doppler se conserva y debe medirse, es necesario que haya una manera de eliminar la ambigüedad del cambio Doppler de la modulación FMCW. Una forma de lograr esto es cambiar K en el barrido de frecuencia FMCW a lo largo del tiempo, por ejemplo, alternando su signo, y comparando los cambios de frecuencia eléctrica resultantes entre ambas pendientes de modulación. Una forma de restar las frecuencias obtenidas a partir de los receptores IQ ópticos (5, 6) anteriores es multiplicar una de las corrientes con el conjugado complejo del otro. Pueden aplicarse técnicas de mezcla de frecuencias convencionales. Esto puede hacerse en el dominio digital o analógico y potencialmente sobre la base de las señales de interferencia como se indica a continuación: fl (0 * ^ (0 Un * Uí + hq * hq) + i Un * ¡2q hq * Uí) en una realización, esto puede implementarse, como se muestra en la figura 2, usando uno o más mezcladores (12) conectados al primer IQ óptico de formación de imágenes (5) y a las salidas IQ ópticas de referencia (6) o a las primeras salidas del conjunto de filtros de paso bajo (13) . Cada uno de los cuatro términos multiplicativos anteriores contiene un primer producto de intermodulación con la diferencia de frecuencias A / (baja frecuencia) y un segundo producto de intermodulación que incluye la adición de las frecuencias Doppler 2v¡ ( + ) . Cuando se combinan los cuatro términos multiplicativos, los términos relacionados con la adición de frecuencias Doppler se cancelan, y solo los productos de intermodulación de baja frecuencia, que contienen la información de profundidad en su frecuencia (como por A / anterior) , permanecen como productos de intermodulación de salida (16) . Alternativamente, como alternativa, se puede filtrar el componente de frecuencia más alta de cada uno de los términos multiplicativos usando un segundo conjunto de filtros de paso bajo (23) y mantener solo los productos de intermodulación de baja frecuencia, que contienen la información de profundidad en su frecuencia (como por A f anterior) , omo productos de intermodulación de salida (16) . En la realización mostrada en la figura 2, el o los mezcladores (12) comprenden: - un primer mezclador (121) , destinado a mezclar el primer componente en cuadratura (8) y el componente en fase de referencia (9) , proporcionando el término multiplicativo (Ilq * l 2i) , y - un segundo mezclador (122) , destinado a mezclar el primer componente en fase (7) y el componente en fase de referencia (9) , proporcionando el término multiplicativo (71 * I2i) . En una técnica de demodulación alternativa, puede trabajarse con los componentes individuales de las señales de interferencia, es decir, el primer componente en fase (7) , el primer componente en cuadratura (8) y las derivadas de las señales de interferencia de referencia, como se proporciona por un módulo de derivación de tiempo (15) : la derivada en tiempo del componente en fase de referencia (90) y la derivada en tiempo del componente en cuadratura de referencia (91) , y adaptarse las técnicas de demodulación de FM que realizan simultáneamente la conversión y demodulación de banda base. Esto puede ser específicamente útil en realizaciones donde sean iguales tanto el oscilador de formación de imágenes como el oscilador de referencia, ya que en esa situación la diferencia de frecuencia en los términos multiplicativos como se expresó anteriormente sería A f = 0, y el uso de derivadas en tiempo permite extraer la información de profundidad codificada en frecuencia para la amplitud de las señales derivadas en tiempo. Por ejemplo, la operación que puede realizarse en uno o más mezcladores (12) en este caso, en el que el oscilador de formación de imágenes y de referencia son el mismo, es: I lQ ÍO h / ( O - I iÁ O h q íO = p jA ÍX jft [2k1Vj + 2 ? eos (0 ) ¡u íO h / (O - I iQ (t) I2Q (t) = p ] A ( x j [2k1v¡ + 2 ? si n (0) de manera similar al enfoque de mezcla de frecuencia directa, en este caso pueden generarse los cuatro términos multiplicativos anteriores y combinarlos para dejar solo el componente de CC, o como alternativa puede filtrarse el componente de frecuencia más lta de cada uno de los términos multiplicativos usando un segundo conjunto de filtros de paso bajo (23) y mantener solo los componentes de CC que contienen la información de profundidad y Doppler en su amplitud. Para separar la información Doppler y de profundidad, puede cambiarse K en el barrido de frecuencia FMCW a lo largo del tiempo, por ejemplo, alternando su signo, y comparando los cambios de componentes de CC resultantes entre ambas pendientes de modulación. Un inconveniente de la demodulación de FM directa es el hecho de que la reflectividad del objeto (pj) y el cambio de frecuencia se mezclan en este valor de CC. Esto puede abordarse demodulando la amplitud por separado: como alternativa, en los casos donde los osciladores de formación de imágenes y de referencia son el mismo, la reflectividad del objeto puede obtenerse también a partir de los términos multiplicativos entre los componentes de señal y los componentes de referencia antes de la derivada en tiempo (por ejemplo, como se proporciona por el primer mezclador (121) y el segundo mezclador (122) en la figura 2) . Para el uso del enfoque de demodulación de FM directa, en la figura 2 se muestra un módulo de derivación de tiempo (15) y uno o más mezcladores que comprenden: - un tercer mezclador (123) , destinado a mezclar el primer componente en fase (7) y el componente en cuadratura de referencia derivado en tiempo (91) , y - un cuarto mezclador (124) , destinado a mezclar el primer componente en cuadratura (8) y el componente en cuadratura de referencia derivado en tiempo (91) . Por lo tanto, la realización en la figura 2 muestra un esquema de demodulación que proporciona demodulación de frecuencia y amplitud simultáneamente. La figura 3 muestra una implementación donde se combinan múltiples canales de formación de imágenes (3) con un canal de referencia común (4) obtenido a partir de una luz reflejada que proviene de la misma escena, pero mezclada con una fuente óptica separada (una de una longitud de onda diferente pero que es coherente con al menos na fracción de la potencia recogida de la escena) . La ventaja del esquema mostrado en la figura 3 es que los diferentes canales de formación de imágenes (3) conservan la diferencia de fase relativa (contenida en los datos IQ) en el dominio eléctrico después de la demodulación. Esto permite la combinación coherente de las señales demoduladas que provienen de dichos canales de formación de imágenes (3) con el fin de recuperar las diferentes direcciones. Para los mezcladores (12) , es posible usar diferentes esquemas de construcción. En particular, pueden implementarse en el dominio analógico sobre la base de circuitos que se basan en un esquema translineal. Uno de estos circuitos es la celda de Gilbert, que se representa en la figura 5. Este circuito tiene la ventaja de funcionar en los cuatro cuadrantes de las señales de interferencia. Ya que las entradas a la celda son siempre diferenciales y basadas en la tensión, las fotocorrientes provenientes de los receptores IQ ópticos (5, 6) anteriores deben amplificarse mediante un amplificador de transimpedancia (14) a una tensión y, si corresponde, derivarse en el dominio analógico. Esto suma complejidad a la circuitería y hace que el esquema sea más difícil de implementar cuando aumenta el número de canales. Con el fin de simplificar la celda de Gilbert, es posible usar las fotocorrientes de un par diferencial equilibrado como fuente tanto de señales de entrada como de polarización de corriente. Esto reducirá la necesidad de amplificadores de transimpedancia intermedios y hará que la celda sea más susceptible de replicación para lograr una integración a gran escala. El oscilador de formación de imágenes (111) para mezclar con los diferentes canales de imagen (3, 4) puede generarse y distribuirse como una señal de tensión sobre la matriz de detección desde una sola abertura de entrada de formación de imágenes (101) sin mayores problemas de escalabilidad. Para simplificar la lectura de la celda, pueden aplicarse esquemas de integración con condensadores conmutados y salidas de video multiplexadas como se muestra en la figura 6. La lectura de dichos condensadores conmutados puede estructurarse de la misma manera que los sensores de formación de imágenes normales, organizándolos por columna y usando los esquemas de multiplexación habituales para encaminar los valores analógicos a la circuitería ADC apropiada. Por último, con el fin de proporcionar la función de mezcla deseada, también es posible modular la amplitud del oscilador local óptico que va a los canales de formación de imágenes. Si se hace esto, no se requiere una mezcla electrónica después de la fotodetección, con ventajas obvias en términos de complejidad del sistema. Para esto, puede usarse un modulador óptico (17) , como se muestra en la figura 4. En una realización, el modulador óptico (17) es un modulador de amplitud óptica, ya sea basado en absorción electroóptica, en un interferómetro Mach-Zehnder o de otro modo. Si la modulación de amplitud deja cierto nivel de modulación de fase, puede agregarse un modulador de fase en serie para garantizar una operación de fase constante y evitar cambios de frecuencia no deseados en el canal de referencia. La modulación de amplitud también puede obtenerse de diferentes maneras, como a través de un amplificador óptico, la modulación de una corriente láser, etc. En algunas realizaciones, el primer componente en fase (7) , el primer componente en cuadratura (8) , el componente en fase de referencia (9) y el componente en cuadratura de referencia (10) necesitarían multiplicarse con diferentes versiones de la señal, cambiadas 90° entre sí con el fin de lograr el resultado matemático deseado directamente. Para lograr esto físicamente, esto requeriría la distribución de señales de referencia moduladas por separado a cada mezclador de salida (12) . Aunque es posible, esto complicaría el diseño y el encaminamiento de señal en el dispositivo, especialmente debido a que la relación de fase entre ambos osciladores ópticos de referencia modulados debe determinarse con precisión. Sin embargo, dado el hecho de que la modulación a aplicar a estos dos canales también es ortogonal en el dominio eléctrico, es posible, en algunas realizaciones, sumarlos juntos en la señal de modulación, como se muestra en la figura 4. Los productos entre el primer componente en fase (7) y el primer componente en cuadratura (8) o entre el componente en fase de referencia (9) y el componente en cuadratura de referencia (10) solo producen productos de intermodulación de alta frecuencia que pueden estar en principio filtrados. Con el fin de separar la información de amplitud y distancia, es posible conmutar la señal de modulación aplicada al modulador óptico (17) entre diferentes modos (con o sin derivada en tiempo) de tal manera que como alternativa se recupere la información de rofundidad y/o la amplitud de señal. Esta simple multiplexación en el dominio de tiempo, que es adecuada para su implementación con un integrador que está sincronizado con la conmutación de la señal de demodulación, también puede reemplazarse por otros esquemas de multiplexación (multiplexación de dominio de frecuencia, multiplexación de código, etc.) . La figura 4 muestra la combinación de las dos opciones de implementación descritas anteriormente, la demodulación de frecuencia Doppler por medio de la modulación de amplitud de la señal de referencia óptica y la multiplexación de tiempo de la demodulación de amplitud/frecuencia, para el caso de una única longitud de onda.
Publicaciones:
ES2868473 (21/10/2021) - A1 Solicitud de patente con informe sobre el estado de la técnica
ES2868473 (28/02/2022) - B2 Patente de invención con examen
Eventos:
En fecha 21/04/2020 se realizó Registro Instancia de Solicitud
En fecha 21/04/2020 se realizó Admisión a Trámite
En fecha 21/04/2020 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 29/04/2020 se realizó Superado examen de oficio
En fecha 29/06/2020 se realizó Realizado IET
En fecha 30/06/2020 se realizó 1109P_Comunicación Traslado del IET
En fecha 21/10/2021 se realizó Publicación Solicitud
En fecha 21/10/2021 se realizó Publicación Folleto Solicitud con IET (A1)
En fecha 18/01/2022 se realizó PETEX_Petición de examen sustantivo
En fecha 07/02/2022 se realizó Validación petición y/o pago de examen sustantivo conforme
En fecha 13/02/2022 se realizó No existen objeciones a la concesión de la solicitud
En fecha 13/02/2022 se realizó Finalización de Examen Sustantivo
En fecha 13/02/2022 se realizó 6121P_Comunicación finalización de examen sustantivo
En fecha 18/02/2022 se realizó Publicación finalización de examen sustantivo
En fecha 21/02/2022 se realizó Concesión con examen sustantivo
En fecha 21/02/2022 se realizó Entrega título
En fecha 21/02/2022 se realizó 6125P_Notificación de concesión con examen sustantivo
En fecha 28/02/2022 se realizó Publicación concesión Patente
En fecha 28/02/2022 se realizó Publicación Folleto Concesión
En fecha 29/08/2022 se realizó Plazo expirado presentación de oposiciones contra la concesión de la Patente
Pagos:
21/04/2020 - Pago Tasas IET
13/05/2022 - Pago 03 Anualidad
10/05/2023 - Pago 04 Anualidad
+ ES-2868473_B21.- Sistema de detección y medición mediante luz (LIDAR) con cambio de frecuencia Doppler suprimido, que comprende: - al menos una fuente de luz configurada para emitir una primera luz, - al menos una abertura de entrada de formación de imágenes (101) y un canal de formación de imágenes (3) asociado a la al menos una abertura de entrada de formación de imágenes (101) , configurada para recibir una luz reflejada de entrada que se refleja sobre un objeto en movimiento irradiado por la al menos una fuente de luz, - al menos una abertura de referencia (102) y un canal de referencia (4) asociado a la al menos una abertura de referencia (102) , configurada para recibir una luz reflejada de referencia que se refleja sobre el objeto en movimiento irradiado por la fuente de luz, - al menos un oscilador de formación de imágenes (111) , - al menos un primer receptor óptico de formación de imágenes (5) asociado a la abertura de entrada de formación de imágenes (101) y al oscilador de formación de imágenes (111) y configurado para obtener una señal de interferencia entre la luz reflejada de entrada y el oscilador de formación de imágenes (111) , - un oscilador de referencia (112) , - un receptor óptico de referencia (6) asociado a la abertura de referencia (101) y al oscilador de referencia (112) y configurado para obtener una señal de interferencia de referencia entre la luz reflejada de referencia y el oscilador de referencia (112) , - al menos un mezclador (12) , conectado a el al menos un primer receptor óptico de formación de imágenes (5) y al receptor óptico de referencia (6) y configurado para producir un producto de intermodulación (16) entre la señal de interferencia y la señal de interferencia de referencia, de tal manera que se cancela o disminuye el cambio de frecuencia Doppler provocado por el objeto en movimiento. 2.- El sistema LIDAR de la reivindicación 1, en el que el al menos un primer receptor óptico de formación de imágenes (5) es un receptor IQ óptico configurado para obtener una señal de interferencia entre la luz reflejada de entrada y el oscilador de formación de imágenes (111) que comprende una primera componente en fase (7) y una primera componente en cuadratura (8) , y el receptor óptico de referencia (6) es un receptor IQ óptico configurado para obtener una señal de interferencia de referencia que comprende una componente en fase de referencia (9) y una componente en cuadratura de referencia (10) . 3.- El sistema LIDAR de la reivindicación 2, que comprende además un módulo de derivación de tiempo (15) , asociado al receptor óptico de referencia (6) y destinado a derivar en tiempo el componente en fase de referencia (9) y el componente en cuadratura de referencia (10) . 4.- El sistema LIDAR de la reivindicación 2, en el que el al menos un mezclador (12) comprende: - un primer mezclador (121) , destinado a mezclar la primera componente en cuadratura (8) y la componente en fase de referencia (9) , - un segundo mezclador (122) , destinado a mezclar la primera componente en fase (7) y la componente en fase de referencia (9) . 5.- El sistema LIDAR de la reivindicación 2, en el que el al menos un mezclador (12) comprende: - un primer mezclador (121) , destinado a mezclar la primera componente en cuadratura (8) y la componente en cuadratura de referencia (10) , - un segundo mezclador (122) , destinado a mezclar la primera componente en fase (7) y la componente en cuadratura de referencia (10) . 6.- El sistema LIDAR de la reivindicación 2, en el que el al menos un mezclador (12) comprende: - un tercer mezclador (123) , destinado a mezclar la primera componente en fase (7) y la componente en cuadratura de referencia derivada en tiempo (91) , y - un cuarto mezclador (124) , destinado a mezclar la primera componente en cuadratura (8) y la componente en cuadratura de referencia derivada en tiempo (91) . 7.- El sistema LIDAR de la reivindicación 2, en el que el al menos un mezclador (12) comprende: - un tercer mezclador (123) , destinado a mezclar la primera componente en fase (7) y la componente en fase de referencia derivada en tiempo (90) , y - un cuarto mezclador (124) , destinado a mezclar la primera componente en uadratura (8) y la componente en fase de referencia derivada en tiempo (90) . 8.- El sistema LIDAR de cualquiera de las reivindicaciones 4 a 7, que comprende además un filtro de paso bajo (23) asociado a cada mezclador (12) . 9.- El sistema LIDAR de la reivindicación 1, en el que el oscilador de referencia (112) y el oscilador de formación de imágenes (111) comparten un origen común. 10.- El sistema LIDAR de la reivindicación 1, en el que la abertura de referencia (102) es la misma que la abertura de entrada (101) , y el canal de referencia (4) y el canal de formación de imágenes (3) se derivan a partir de la misma por medio de un divisor (2) . 11.- El sistema LIDAR de la reivindicación 1, en el que la longitud de onda del oscilador de referencia (112) permanece estática y la longitud de onda del primer oscilador óptico (111) se barre siguiendo un esquema FMCW (onda continua modulada en frecuencia) convencional. 12.- El sistema LIDAR de la reivindicación 1, que comprende además uno o más filtros de paso bajo (13) , asociados a los receptores ópticos (5, 6) y destinados a filtrar la señal de interferencia y la señal de interferencia de referencia, eliminando las frecuencias muy altas. 13.- El sistema LIDAR de la reivindicación 2, que comprende además unos amplificadores de transimpedancia (14) colocados después del receptor óptico de referencia (6) y del primer receptor óptico de formación de imágenes (5) , destinados a amplificar el componente en fase de referencia (9) , el componente en cuadratura de referencia (10) , el primer componente en fase (7) y el primer componente en cuadratura (8) . 14.- El sistema LIDAR de cualquiera de las reivindicaciones 1, 4 a 7, en el que los mezcladores (12) son celdas Gilbert. 15.- Un sistema LIDAR que comprende: - al menos una fuente de luz configurada para emitir una primera luz, - al menos una abertura de entrada de formación de imágenes (101) y un canal de formación de imágenes (3) asociado a la al menos una abertura de entrada e formación de imágenes (101) , configurada para recibir una luz reflejada de entrada que se refleja sobre un objeto en movimiento irradiado por la fuente de luz, - al menos una abertura de referencia (102) y un canal de referencia (4) asociado a la al menos una abertura de referencia (102) , configurada para recibir una luz reflejada de referencia que se refleja sobre el objeto en movimiento irradiado por la fuente de luz, - al menos un oscilador de formación de imágenes (111) , - al menos un primer receptor óptico de formación de imágenes (5) asociado a la abertura de entrada de formación de imágenes (101) y al oscilador de formación de imágenes (111) y configurado para obtener una señal de interferencia entre la luz reflejada de entrada y el oscilador de formación de imágenes (111) , - un oscilador de referencia (112) , - un receptor óptico de referencia (6) asociado a la abertura de referencia (101) y al oscilador de referencia (112) y configurado para obtener una señal de interferencia de referencia entre la luz reflejada de referencia y el oscilador de referencia (112) , - un modulador óptico (17) conectado a el al menos un oscilador de formación de imágenes (111) , y configurado para aplicar una modulación de amplitud o fase al oscilador de formación de imágenes (111) con una señal derivada a partir del canal de referencia (4) , de tal manera que un producto de intermodulación (16) entre la señal de interferencia y la señal de interferencia de referencia aparece en la salida del al menos un primer receptor óptico de formación de imágenes (5) , de tal manera que se cancela o disminuye el cambio de frecuencia Doppler provocado por el objeto en movimiento. 16.- El sistema LIDAR de la reivindicación 15, en el que el al menos un primer receptor óptico de formación de imágenes (5) es un receptor IQ óptico configurado para obtener una señal de interferencia entre la luz reflejada de entrada y el oscilador de formación de imágenes (111) que comprende una primera componente en fase (7) y una primera componente en cuadratura (8) , y el receptor óptico de referencia (6) es un receptor IQ óptico configurado para obtener una señal de interferencia de referencia que comprende una componente en fase de referencia (9) y una componente en cuadratura de referencia (10) . 17.- El sistema LIDAR de la reivindicación 15, en el que el oscilador de referencia (112) el oscilador de formación de imágenes (111) comparten un origen común. 18.- El sistema LIDAR de la reivindicación 15, en el que la abertura de referencia (102) es la misma que la abertura de entrada (101) , y el canal de referencia (4) y el canal de formación de imágenes (3) se derivan a partir de la misma por medio de un divisor (2) . 19.- El sistema LIDAR de la reivindicación 15, en el que la longitud de onda del oscilador de referencia (112) permanece estática y la longitud de onda del primer oscilador óptico (111) se barre siguiendo un esquema FMCW (onda continua modulada en frecuencia) convencional. 20.- El sistema LIDAR de la reivindicación 15, que comprende además uno o más filtros de paso bajo (13) , asociados a los receptores ópticos (5, 6) y destinados a filtrar la señal de interferencia y la señal de interferencia de referencia, eliminando las frecuencias muy altas. 21.- El sistema LIDAR de la reivindicación 16, que comprende adicionalmente unos amplificadores de transimpedancia (14) colocados después del receptor óptico de referencia (6) y del primer receptor óptico de formación de imágenes (5) , destinados a amplificar la componente en fase de referencia (9) , la componente en cuadratura de referencia (10) , la primera componente en fase (7) y la primera componente en cuadratura (8) . 22.- Método para suprimir el cambio de frecuencia Doppler en un sistema LIDAR, que hace uso del sistema de cualquiera de las reivindicaciones anteriores, y comprende las etapas de: - emitir una primera luz, dirigida a un objeto en movimiento, - recibir una luz reflejada procedente del objeto en movimiento, - obtener una primera señal de interferencia entre la luz reflejada y un oscilador de formación de imágenes (111) , - obtener una señal de interferencia de referencia entre la luz reflejada y un oscilador de referencia (112) , - obtener un producto de intermodulación (16) entre la señal de interferencia y la señal de interferencia de referencia, de tal manera que se cancela o disminuye el cambio de frecuencia Doppler provocado por el objeto en movimiento.
+ ES-2868473_A11.- Sistema de detección y medición mediante luz (LIDAR) con cambio de frecuencia Doppler suprimido, que comprende: - al menos una fuente de luz configurada para emitir una primera luz, - al menos una abertura de entrada de formación de imágenes (101) y un canal de formación de imágenes (3) asociado a la al menos una abertura de entrada de formación de imágenes (101) , configurada para recibir una luz reflejada de entrada que se refleja sobre un objeto en movimiento irradiado por la al menos una fuente de luz, - al menos una abertura de referencia (102) y un canal de referencia (4) asociado a la al menos una abertura de referencia (102) , configurada para recibir una luz reflejada de referencia que se refleja sobre el objeto en movimiento irradiado por la fuente de luz, - al menos un oscilador de formación de imágenes (111) , - al menos un primer receptor óptico de formación de imágenes (5) asociado a la abertura de entrada de formación de imágenes (101) y al oscilador de formación de imágenes (111) y configurado para obtener una señal de interferencia entre la luz reflejada de entrada y el oscilador de formación de imágenes (111) , - un oscilador de referencia (112) , - un receptor óptico de referencia (6) asociado a la abertura de referencia (101) y al oscilador de referencia (112) y configurado para obtener una señal de interferencia de referencia entre la luz reflejada de referencia y el oscilador de referencia (112) , - al menos un mezclador (12) , conectado a el al menos un primer receptor óptico de formación de imágenes (5) y al receptor óptico de referencia (6) y configurado para producir un producto de intermodulación (16) entre la señal de interferencia y la señal de interferencia de referencia, de tal manera que se cancela o disminuye el cambio de frecuencia Doppler provocado por el objeto en movimiento. 2.- El sistema LIDAR de la reivindicación 1, en el que el al menos un primer receptor óptico de formación de imágenes (5) es un receptor IQ óptico configurado para obtener una señal de interferencia entre la luz reflejada de entrada y el oscilador de formación de imágenes (111) que comprende una primera componente en fase (7) y una primera componente en cuadratura (8) , y el receptor óptico de referencia (6) es un receptor IQ óptico configurado para obtener una señal de interferencia de referencia que comprende una componente en fase de referencia (9) y una componente en cuadratura de referencia (10) . 3.- El sistema LIDAR de la reivindicación 2, que comprende además un módulo de derivación de tiempo (15) , asociado al receptor óptico de referencia (6) y destinado a derivar en tiempo el componente en fase de referencia (9) y el componente en cuadratura de referencia (10) . 4.- El sistema LIDAR de la reivindicación 2, en el que el al menos un mezclador (12) comprende: - un primer mezclador (121) , destinado a mezclar la primera componente en cuadratura (8) y la componente en fase de referencia (9) , - un segundo mezclador (122) , destinado a mezclar la primera componente en fase (7) y la componente en fase de referencia (9) . 5.- El sistema LIDAR de la reivindicación 2, en el que el al menos un mezclador (12) comprende: - un primer mezclador (121) , destinado a mezclar la primera componente en cuadratura (8) y la componente en cuadratura de referencia (10) , - un segundo mezclador (122) , destinado a mezclar la primera componente en fase (7) y la componente en cuadratura de referencia (10) . 6.- El sistema LIDAR de la reivindicación 2, en el que el al menos un mezclador (12) comprende: - un tercer mezclador (123) , destinado a mezclar la primera componente en fase (7) y la componente en cuadratura de referencia derivada en tiempo (91) , y - un cuarto mezclador (124) , destinado a mezclar la primera componente en cuadratura (8) y la componente en cuadratura de referencia derivada en tiempo (91) . 7.- El sistema LIDAR de la reivindicación 2, en el que el al menos un mezclador (12) comprende: - un tercer mezclador (123) , destinado a mezclar la primera componente en fase (7) y la componente en fase de referencia derivada en tiempo (90) , y - un cuarto mezclador (124) , destinado a mezclar la primera componente en uadratura (8) y la componente en fase de referencia derivada en tiempo (90) . 8.- El sistema LIDAR de cualquiera de las reivindicaciones 4 a 7, que comprende además un filtro de paso bajo (23) asociado a cada mezclador (12) . 9.- El sistema LIDAR de la reivindicación 1, en el que el oscilador de referencia (112) y el oscilador de formación de imágenes (111) comparten un origen común. 10.- El sistema LIDAR de la reivindicación 1, en el que la abertura de referencia (102) es la misma que la abertura de entrada (101) , y el canal de referencia (4) y el canal de formación de imágenes (3) se derivan a partir de la misma por medio de un divisor (2) . 11.- El sistema LIDAR de la reivindicación 1, en el que la longitud de onda del oscilador de referencia (112) permanece estática y la longitud de onda del primer oscilador óptico (111) se barre siguiendo un esquema FMCW (onda continua modulada en frecuencia) convencional. 12.- El sistema LIDAR de la reivindicación 1, que comprende además uno o más filtros de paso bajo (13) , asociados a los receptores ópticos (5, 6) y destinados a filtrar la señal de interferencia y la señal de interferencia de referencia, eliminando las frecuencias muy altas. 13.- El sistema LIDAR de la reivindicación 2, que comprende además unos amplificadores de transimpedancia (14) colocados después del receptor óptico de referencia (6) y del primer receptor óptico de formación de imágenes (5) , destinados a amplificar el componente en fase de referencia (9) , el componente en cuadratura de referencia (10) , el primer componente en fase (7) y el primer componente en cuadratura (8) . 14.- El sistema LIDAR de cualquiera de las reivindicaciones 1, 4 a 7, en el que los mezcladores (12) son celdas Gilbert. 15.- Un sistema LIDAR que comprende: - al menos una fuente de luz configurada para emitir una primera luz, - al menos una abertura de entrada de formación de imágenes (101) y un canal de formación de imágenes (3) asociado a la al menos una abertura de entrada e formación de imágenes (101) , configurada para recibir una luz reflejada de entrada que se refleja sobre un objeto en movimiento irradiado por la fuente de luz, - al menos una abertura de referencia (102) y un canal de referencia (4) asociado a la al menos una abertura de referencia (102) , configurada para recibir una luz reflejada de referencia que se refleja sobre el objeto en movimiento irradiado por la fuente de luz, - al menos un oscilador de formación de imágenes (111) , - al menos un primer receptor óptico de formación de imágenes (5) asociado a la abertura de entrada de formación de imágenes (101) y al oscilador de formación de imágenes (111) y configurado para obtener una señal de interferencia entre la luz reflejada de entrada y el oscilador de formación de imágenes (111) , - un oscilador de referencia (112) , - un receptor óptico de referencia (6) asociado a la abertura de referencia (101) y al oscilador de referencia (112) y configurado para obtener una señal de interferencia de referencia entre la luz reflejada de referencia y el oscilador de referencia (112) , - un modulador óptico (17) conectado a el al menos un oscilador de formación de imágenes (111) , y configurado para aplicar una modulación de amplitud o fase al oscilador de formación de imágenes (111) con una señal derivada a partir del canal de referencia (4) , de tal manera que un producto de intermodulación (16) entre la señal de interferencia y la señal de interferencia de referencia aparece en la salida del al menos un primer receptor óptico de formación de imágenes (5) , de tal manera que se cancela o disminuye el cambio de frecuencia Doppler provocado por el objeto en movimiento. 16.- El sistema LIDAR de la reivindicación 15, en el que el al menos un primer receptor óptico de formación de imágenes (5) es un receptor IQ óptico configurado para obtener una señal de interferencia entre la luz reflejada de entrada y el oscilador de formación de imágenes (111) que comprende una primera componente en fase (7) y una primera componente en cuadratura (8) , y el receptor óptico de referencia (6) es un receptor IQ óptico configurado para obtener una señal de interferencia de referencia que comprende una componente en fase de referencia (9) y una componente en cuadratura de referencia (10) . 17.- El sistema LIDAR de la reivindicación 15, en el que el oscilador de referencia (112) el oscilador de formación de imágenes (111) comparten un origen común. 18.- El sistema LIDAR de la reivindicación 15, en el que la abertura de referencia (102) es la misma que la abertura de entrada (101) , y el canal de referencia (4) y el canal de formación de imágenes (3) se derivan a partir de la misma por medio de un divisor (2) . 19.- El sistema LIDAR de la reivindicación 15, en el que la longitud de onda del oscilador de referencia (112) permanece estática y la longitud de onda del primer oscilador óptico (111) se barre siguiendo un esquema FMCW (onda continua modulada en frecuencia) convencional. 20.- El sistema LIDAR de la reivindicación 15, que comprende además uno o más filtros de paso bajo (13) , asociados a los receptores ópticos (5, 6) y destinados a filtrar la señal de interferencia y la señal de interferencia de referencia, eliminando las frecuencias muy altas. 21.- El sistema LIDAR de la reivindicación 16, que comprende adicionalmente unos amplificadores de transimpedancia (14) colocados después del receptor óptico de referencia (6) y del primer receptor óptico de formación de imágenes (5) , destinados a amplificar la componente en fase de referencia (9) , la componente en cuadratura de referencia (10) , la primera componente en fase (7) y la primera componente en cuadratura (8) . 22.- Método para suprimir el cambio de frecuencia Doppler en un sistema LIDAR, que hace uso del sistema de cualquiera de las reivindicaciones anteriores, y comprende las etapas de: - emitir una primera luz, dirigida a un objeto en movimiento, - recibir una luz reflejada procedente del objeto en movimiento, - obtener una primera señal de interferencia entre la luz reflejada y un oscilador de formación de imágenes (111) , - obtener una señal de interferencia de referencia entre la luz reflejada y un oscilador de referencia (112) , - obtener un producto de intermodulación (16) entre la señal de interferencia y la señal de interferencia de referencia, de tal manera que se cancela o disminuye el cambio de frecuencia Doppler provocado por el objeto en movimiento.
Los productos y servicios protegidos por este registro son:
G01S 17/02 - G01S 7/48
Descripciones:
+ ES-2868473_B2 SISTEMA LIDAR CON CAMBIO DE FRECUENCIA DOPPLER SUPRIMIDO OBJETO DE LA INVENCIÓN El objeto de la invención es un sistema LIDAR que permite reducir o suprimir completamente el cambio de frecuencia inducido por el movimiento de los objetos en una escena en relación con el LIDAR, un efecto conocido como cambio de frecuencia Doppler. ANTECEDENTES DE LA INVENCIÓN Un dispositivo de detección y medición mediante luz (LIDAR, Light Detection and Ranging) crea un mapa de distancia a un objetivo iluminando el objetivo con luz láser y midiendo la luz reflejada con un sensor. Las diferencias en las propiedades de la luz láser, incluidos los tiempos totales de ida y vuelta, la fase o la longitud de onda, pueden usarse para realizar representaciones digitales en 3D del objetivo. Los LIDAR se usan comúnmente para realizar mapas de alta resolución, con aplicaciones en geodesia, geomática, arqueología, geografía, geología, geomorfología, sismología, silvicultura, física atmosférica, guía láser, mapeo por barrido láser aéreo (ALSM) y altimetría láser. La tecnología también se usa en el control y navegación para algunos vehículos autónomos. Algunos LIDAR hacen uso de lo que se conoce como detección coherente. En este esquema de detección, la luz reflejada en la muestra se mezcla con un oscilador local que es coherente con la luz reflejada. Este enfoque tiene varias ventajas, tal como la ganancia óptica que permite la sensibilidad de un solo fotón y permite el uso de cambios en la fase y la longitud de onda de la luz para medir la distancia. Un problema común que aparece al hacer uso de este tipo de LIDAR es el cambio de frecuencia inducido por el movimiento de los objetos en la escena en relación con el dispositivo, un efecto conocido como cambio de frecuencia Doppler. Tales cambios de frecuencia pueden ser grandes en relación con el ancho de banda de las señales usadas para medir las propiedades relevantes de los objetos y pueden complicar la extracción e dichos datos relevantes. El presente problema se vuelve de gran importancia si la velocidad relativa de los objetos es significativa, como en el caso de vehículos, aeronaves o satélites. Este cambio de frecuencia es variable y, a menudo, desconocido y puede ampliar el ancho de banda de las señales detectadas de manera muy significativa. En el caso de los vehículos terrestres, la velocidad relativa puede alcanzar los 300 km/h o más. Esta velocidad relativa corresponde a un cambio de frecuencia Doppler de 54, 0 MHz para la iluminación de A = 1, 55 pm. Este cambio de frecuencia variable complica la lectura electrónica y la cadena de procesamiento de señal de los sistemas que dependen de la detección coherente de la señal del objeto. Incluso si la cadena de señal aún puede manejarse para un pequeño número de canales, aumenta el coste, el tamaño y la complejidad del sistema LIDAR final. Además, plantea un obstáculo importante para la implementación práctica del sistema LIDAR coherente multicanal con una gran cantidad de entradas. Para resolver el problema explicado ha habido diversos enfoques, incluido uno de ellos que emplea un muestreo no uniforme u otros esquemas de detección comprimidos para reducir la velocidad de datos general de las señales. En general, todos los enfoques desarrollados tienen los mismos inconvenientes: circuitería de lectura electrónica compleja y cadena de procesamiento de señal general, lo que los hace caros, de gran tamaño y, en general, difíciles de implementar y escalar para arquitecturas multicanal con un gran número de canales. DESCRIPCIÓN DE LA INVENCIÓN El sistema LIDAR objeto de la presente invención describe una modificación de un sistema LIDAR coherente que hace uso de una o más aberturas de entrada, y que es simple en su implementación. Su objetivo es reducir o eliminar por completo el cambio de frecuencia inducido por el movimiento de los objetos en una escena en relación con el LIDAR, un efecto conocido como cambio de frecuencia Doppler. En la invención, la reducción o eliminación del cambio de frecuencia se realiza midiendo la señal cambiada Doppler en un canal de referencia y a continuación, haciendo uso de as propiedades matemáticas de la mezcla de señales en el dominio del tiempo, cambiar la frecuencia de uno o más canales de formación de imágenes para cancelar o reducir dicho cambio Doppler. Específicamente, el sistema de detección y medición mediante luz (LIDAR) con cambio de frecuencia Doppler suprimido de la presente invención comprende al menos una fuente de luz configurada para emitir una primera luz, dirigida a un objeto exterior. La primera luz se refleja de manera difusa o especular en el objeto y a continuación se recibe al menos en una abertura de entrada, siendo por lo tanto una luz reflejada. La luz reflejada puede dividirse en un divisor, colocado a continuación de la al menos una abertura de entrada, estando el divisor configurado para dividir la luz reflejada en un canal de referencia y al menos un primer canal de formación de imágenes. A continuación, una parte de la luz reflejada dividida se guía a través del al menos un primer canal de formación de imágenes a un primer receptor IQ óptico de formación de imágenes (en fase y en cuadratura, In-Phase Quadrature-Phase) asociado al primer canal de formación de imágenes. El primer receptor IQ óptico de formación de imágenes está configurado para obtener una primera señal de interferencia que comprende un primer componente en fase y un primer componente en cuadratura. Además, otra parte de la luz reflejada se guía a través del canal de referencia a un receptor IQ óptico de referencia asociado al canal de referencia. El receptor IQ óptico de referencia está configurado para obtener una señal de interferencia de referencia que comprende un componente en fase de referencia y un componente en cuadratura de referencia. Al menos un oscilador óptico local está asociado al primer receptor IQ óptico de formación de imágenes y al receptor IQ óptico de referencia y está configurado para ser temporalmente coherente con la luz reflejada. Por último, en una realización, el sistema comprende al menos un mezclador, conectado al primer receptor IQ óptico de formación de imágenes y al receptor IQ óptico de referencia, y configurado para obtener un primer producto de intermodulación con una frecuencia más alta y un segundo producto de intermodulación de interés en el que su cambio Doppler se escala o se elimina por completo. El sistema descrito anteriormente es una posible realización de la presente invención. Sin embargo, el sistema puede comprender una abertura de referencia y varias aberturas de entrada, o un canal de referencia y varios canales de formación de imágenes asociados a una o más aberturas de entrada. El sistema también puede comprender un único oscilador óptico local asociado a todos los receptores IQ ópticos, o un oscilador óptico local de referencia asociado al receptor IQ óptico de referencia y un oscilador óptico local de formación de imágenes asociado a los receptores IQ ópticos de referencia, o un oscilador óptico local de referencia asociado al receptor IQ óptico de referencia, y varios osciladores ópticos locales de formación de imágenes, asociados cada uno a uno o más receptores IQ ópticos de formación de imágenes. El sistema también puede comprender un modulador de amplitud y/o fase óptica aplicado a los osciladores ópticos locales de formación de imágenes, de tal manera que la generación de los productos de intermodulación se produce directamente en el fotodetector sin la necesidad de una mezcla electrónica. DESCRIPCIÓN DE LOS DIBUJOS Para complementar la descripción que se realiza y con el fin de ayudar a una mejor comprensión de las características de la invención, de acuerdo con un ejemplo preferido de una realización práctica de la misma, se adjunta un conjunto de dibujos como una parte integral de dicha descripción en la que, con carácter ilustrativo y no limitativo, se ha representado lo siguiente. Figura 1A.- Muestra un esquema de la abertura de entrada, los receptores IQ ópticos y los osciladores ópticos locales de referencia y de formación de imágenes en una realización de la invención. Figura 1B.- Muestra una implementación alternativa en la que se usan unos MMI de 2x4 para los receptores IQ ópticos. Figura 2.- Muestra un esquema del sistema LIDAR en una realización de la invención con un canal de referencia y un canal de formación de imágenes. Figura 3.- Muestra un esquema del sistema LIDAR en una realización de la invención con un canal de referencia y una matriz de canales de formación de imágenes con nformación de dirección codificada en la fase relativa entre los mismos. Figura 4.- Muestra un esquema del sistema LIDAR en una realización de la invención con una pluralidad de aberturas de entrada y un modulador de amplitud para la mezcla directa de la señal de referencia en los fotodetectores. Figura 5.-Muestra dos esquemas de una celda de Gilbert, uno que incluye los fotodetectores para permitir la multiplicación directa de la fotocorriente diferencial. Figura 6.- Muestra un esquema de integración de una celda de Gilbert, usando condensadores conmutados. REALIZACIÓN PREFERENTE DE LA INVENCIÓN Con la ayuda de las figuras 1A a 6, se describen a continuación las realizaciones preferentes de la presente invención. La invención se refiere a un sistema LIDAR que comprende al menos una fuente de luz configurada para emitir una primera luz, dirigida a un objeto exterior. La primera luz se refleja en el objeto y a continuación se recibe en una abertura de entrada de referencia (102) y en una abertura de entrada de formación de imágenes (101) en una primera realización de la invención, siendo una luz reflejada. La abertura de entrada de referencia (102) permite producir una señal de interferencia de referencia entre la luz reflejada procedente de la escena y un oscilador de referencia (112) . Esta señal de interferencia de referencia se usa para modular una señal de interferencia formada entre la luz reflejada que proviene de la escena recogida por la abertura de entrada de formación de imágenes (101) y un oscilador de formación de imágenes (111) . En cualquier implementación dada, la abertura de entrada de referencia (102) y la de la o las aberturas de entrada de imagen (101) pueden superponerse, como se muestra, por ejemplo, en la realización de la figura 1A, así como el oscilador de referencia (112) y los osciladores de formación de imágenes (111) . Es importante para la invención que el oscilador de referencia (112) y el oscilador de ormación de imágenes (111) muestren cierto grado de coherencia temporal con la luz reflejada, de tal manera que la señal de interferencia formada pueda procesarse a frecuencias eléctricas. En una implementación a modo de ejemplo, mostrada en la figura 1A, el sistema comprende una única abertura de entrada (101, 102) . En este caso, el sistema comprende una fuente de luz, que emite una luz dirigida a un objeto. La luz se refleja en el objeto y la luz reflejada, que entra al sistema por la abertura de entrada (101, 102) se divide en un primer canal de formación de imágenes (3) y un canal de referencia (4) por un divisor de 1x2 (2) . Es importante para la invención que los al menos dos canales, el canal de referencia (4) y el primer canal de formación de imágenes (3) , se vean afectados por el movimiento de los objetos a través del cambio de frecuencia Doppler sustancialmente de la misma manera, mientras que la modulación portadora de información no Doppler permanece diferente entre los mismos. Esto permite combinarlos de tal manera que el cambio de frecuencia Doppler se elimine o se reduzca en gran medida, mientras se recupera la modulación portadora de información. Como se muestra en la figura 1A, el primer canal de formación de imágenes (3) se alimenta a un primer receptor IQ óptico de formación de imágenes (5) , y el canal de referencia (4) se alimenta a un receptor IQ óptico de referencia (6) . El primer receptor óptico de formación de imágenes (5) está asociado a un oscilador de formación de imágenes (111) y el receptor óptico de referencia (6) está asociado a un oscilador de referencia (112) . Dentro de los receptores IQ ópticos (5, 6) , ambos osciladores (111, 112) se alimentan a través de híbridos de 90° que generan el cambio de fase necesario entre el componente en fase (7, 9) y el componente en cuadratura (8, 10) de cada canal. En otras realizaciones, los receptores IQ (5, 6) podrían implementarse por medio de acopladores MMI (Multi Mode Interference, Interferencia Multi Modo) de 2x4 diseñados para proporcionar los cambios de fase requeridos entre las 4 salidas (7, 8, 9, 10) y cada una de las dos entradas (3, 4) . En la figura 1B se muestra una realización en la que el primer receptor IQ óptico de formación de imágenes (5) es un acoplador MMI de 2x4 que se alimenta con el primer canal de formación de imágenes (3) y un oscilador de formación de imágenes (111) , y el receptor IQ óptico de referencia (6) es un acoplador MMI de 2x4 que se alimenta con el canal de referencia (4) y un oscilador de referencia (112) . En una realización, el oscilador de formación de imágenes (111) tiene su longitud de onda barrida que sigue un esquema FMCW (onda continua modulada en frecuencia, Frequency Modulated Continuous Wave) convencional y el oscilador de referencia (112) mantiene su longitud de onda estática. Para que esta implementación funcione, es importante que la luz reflejada tenga componentes que sean coherentes con ambos componentes en los osciladores (111, 112) . Para esto, la iluminación debe derivarse a partir de una combinación de ambos componentes, o ambos componentes deben compartir un origen común con la iluminación que garantice la coherencia mutua. El primer receptor IQ óptico de formación de imágenes (5) está asociado al primer canal de formación de imágenes (3) y está configurado para obtener una primera señal de interferencia que comprende un primer componente en fase (7) y un primer componente en cuadratura (8) . El receptor IQ óptico de referencia (6) está asociado al canal de referencia (4) y configurado para obtener una señal de interferencia de referencia que comprende un componente en fase de referencia (9) y un componente en cuadratura de referencia (10) . Ambas señales de interferencia se verán afectadas por el efecto Doppler sustancialmente de la misma manera (con pequeñas diferencias debido a las diferentes longitudes de onda, en algunas realizaciones) . Sin embargo, solo la primera señal de interferencia, asociada al oscilador de formación de imágenes (111) , transporta información sobre la distancia del objeto al sistema LIDAR en su frecuencia de interferencia. La mezcla de ambas señales, la primera señal de interferencia y la señal de referencia, en al menos un mezclador (12) , da como resultado la generación de dos productos de intermodulación: un primer producto de intermodulación con mayor frecuencia que puede descartarse, y un producto de intermodulación de salida (16) con menor frecuencia, que tiene su cambio Doppler escalado significativamente, y que proporciona la posibilidad de llevar la información de medición y amplitud a la banda base, y de este modo minimizar la frecuencia de muestreo y la complejidad de lectura electrónica. Por ejemplo, a continuación se derivan la primera señal de interferencia y la señal de interferencia de referencia para esta implementación. Se supone que la abertura de ntrada de formación de imágenes (101) y la abertura de referencia (102) están sustancialmente en la misma posición, excepto por posibles cambios de fase relativos si la abertura de entrada de formación de imágenes (101) es parte de una matriz. En el caso de una iluminación igual de la escena con dos fuentes de luz de dos longitudes de onda (con números de onda asociados y frecuencias angulares k1, k 2 y &>2> respectivamente) e igual amplitud A, la señal de luz a una distancia x de la fuente de luz es: donde se supone que la primera longitud de onda de la primera fuente de luz del sistema LIDAR se somete a una modulación de frecuencia lineal con constante K. Si el objeto que refleja la luz emitida por la primera fuente de luz es un único reflector difuso, el objeto, a una distancia x¡ con reflectividad de intensidad p¡ en la dirección de la abertura de entrada (101) y la velocidad relativa en la dirección entre la abertura de entrada (101) y el objeto v j, el campo reflejado de la luz recogida en la abertura de entrada (101) será: dónde í es el índice de la apertura de entrada en el caso de que haya una matriz de los mismos. El cambio Doppler es visible en los términos 2k1vj y 2k2vj en las ecuaciones, modificando la frecuencia de la luz reflejada. Para el cálculo de las señales de interferencia en los receptores IQ ópticos (5, 6) , se supone por simplicidad que los dos componentes de longitud de onda de los osciladores de referencia y de formación de imágenes (111, 112) tienen una amplitud de unidad: E X i ( t ) = [ e - j ( ^ i t + n K t 2+ ^ 1) ] Ex2 (t) = e -AW2t + 02) después del receptor IQ óptico de formación de imágenes (5) y el receptor IQ óptico de referencia (6) , la primera señal de interferencia y la señal de interferencia de referencia son, respectivamente: En estos, los productos de batido donde persiste la diferencia de frecuencias angulares ópticas estarán en una frecuencia muy alta para los estándares eléctricos una vez detectados. Por ejemplo, suponiendo que las dos longitudes de onda de la luz de las fuentes de luz están separadas 0, 1 nm a una longitud de onda de 1, 55 pm, el producto de intermodulación tiene una frecuencia de 12, 5 GHz: por el contrario, los productos de batido donde el oscilador local y las frecuencias de luz reflejada son iguales, se demodulan a una frecuencia más baja, derivada a partir de la diferencia de frecuencia entre la frecuencia de modulación de fase emitida y recibida más o menos el cambio Doppler. Para la velocidad típica de los vehículos terrestres, el cambio Doppler será igual o inferior a 100 MHz, por lo que es posible suprimir los términos de mezcla de frecuencias más altas (aquellos que incluyen la diferencia de las frecuencias angulares ópticas) por medio de un filtro de paso bajo. Por lo tanto, como se muestra en la figura 2, puede asociarse un primer conjunto de filtros de paso bajo (13) a los receptores IQ ópticos (5, 6) con el fin de filtrar el primer componente en fase (7) , el primer componente en cuadratura (8) , el componente en fase de referencia (9) y el componente en cuadratura de referencia (10) . A continuación, solo nos centraremos en las componentes de baja frecuencia de las señales de interferencia: La información de profundidad y velocidad está codificada en la frecuencia (y fase) de ambas fotocorrientes. Si nos centramos solo en la información de frecuencia, vemos que las frecuencias de It (t) y /2 (t) son: los componentes de estos dos cambios de frecuencia se escalan de manera diferente con la velocidad de línea. La constante de modulación K tiene un impacto directo en la distancia-frecuencias derivadas. Sin embargo, el cambio Doppler permanece independiente y está determinado únicamente por las propiedades de la escena. Ya que el cambio Doppler puede subir a frecuencias de varias decenas de MHz, requiere una electrónica de adquisición rápida, lo que puede sumarse al coste del sistema. Estas frecuencias de video también son un problema cuando se trata de ampliar la detección de escena con múltiples canales de formación de imágenes paralelos (3) . Sin embargo, observamos que la diferencia de estas dos frecuencias es: si las dos longitudes de onda de las luces emitidas por las dos fuentes de luz se eligen para estar cerca una de otra (por ejemplo, una separación de 0, 1 nma una longitud de onda de 1, 55 pm) , la diferencia de los cambios de frecuencia Doppler se reduce significativamente (2 kHz para una v¡ de 50m /s) . Sin embargo, es digno de mención que ambas longitudes de onda pueden ser iguales. En este caso, el cambio Doppler se suprime totalmente, mientras que se conserva el cambio de frecuencia debido a FMCW. Este enfoque simplifica el sistema óptico necesario y la circuitería electro-óptica asociada. Si ambas longitudes de onda son iguales, el cambio Doppler se suprime totalmente y la frecuencia de la señal se mueve a la banda base. Esta frecuencia Doppler más baja permite una reducción significativa de la velocidad de línea, el rendimiento de datos y la complejidad del hardware en sistemas donde se desea una gran cantidad de aperturas de entrada (101) . Si la frecuencia Doppler se conserva y debe medirse, es necesario que haya una manera de eliminar la ambigüedad del cambio Doppler de la modulación FMCW. Una forma de lograr esto es cambiar K en el barrido de frecuencia FMCW a lo largo del tiempo, por ejemplo, alternando su signo, y comparando los cambios de frecuencia eléctrica resultantes entre ambas pendientes de modulación. Una forma de restar las frecuencias obtenidas a partir de los receptores IQ ópticos (5, 6) anteriores es multiplicar una de las corrientes con el conjugado complejo del otro. Pueden aplicarse técnicas de mezcla de frecuencias convencionales. Esto puede hacerse en el dominio digital o analógico y potencialmente sobre la base de las señales de interferencia como se indica a continuación: f i ( 0 * ^ ( 0 Un * hí + hq * hq) + i Un * hq hq * hí) en una realización, esto puede implementarse, como se muestra en la figura 2, usando uno o más mezcladores (12) conectados al primer IQ óptico de formación de imágenes (5) y a las salidas IQ ópticas de referencia (6) o a las primeras salidas del conjunto de filtros de paso bajo (13) . Cada uno de los cuatro términos multiplicativos anteriores contiene un primer producto de intermodulación con la diferencia de frecuencias A / (baja frecuencia) y un segundo producto de intermodulación que incluye la adición de las frecuencias Doppler 2v¡ ( + ) . Cuando se combinan los cuatro términos multiplicativos, los términos relacionados con la adición de frecuencias Doppler se cancelan, y solo los productos de intermodulación de baja frecuencia, que contienen la información de profundidad en su frecuencia (como por A / anterior) , permanecen como productos de intermodulación de salida (16) . Alternativamente, como alternativa, se puede filtrar el componente de frecuencia más alta de cada uno de los términos multiplicativos usando un segundo conjunto de filtros de paso bajo (23) y mantener solo los productos de intermodulación de baja frecuencia, que contienen la información de profundidad en su frecuencia (como por A f anterior) , omo productos de intermodulación de salida (16) . En la realización mostrada en la figura 2, el o los mezcladores (12) comprenden: - un primer mezclador (121) , destinado a mezclar el primer componente en cuadratura (8) y el componente en fase de referencia (9) , proporcionando el término multiplicativo (Ilq * l 2i) , y - un segundo mezclador (122) , destinado a mezclar el primer componente en fase (7) y el componente en fase de referencia (9) , proporcionando el término multiplicativo (71 * I2i) . En una técnica de demodulación alternativa, puede trabajarse con los componentes individuales de las señales de interferencia, es decir, el primer componente en fase (7) , el primer componente en cuadratura (8) y las derivadas de las señales de interferencia de referencia, como se proporciona por un módulo de derivación de tiempo (15) : la derivada en tiempo del componente en fase de referencia (90) y la derivada en tiempo del componente en cuadratura de referencia (91) , y adaptarse las técnicas de demodulación de FM que realizan simultáneamente la conversión y demodulación de banda base. Esto puede ser específicamente útil en realizaciones donde sean iguales tanto el oscilador de formación de imágenes como el oscilador de referencia, ya que en esa situación la diferencia de frecuencia en los términos multiplicativos como se expresó anteriormente sería A f = 0, y el uso de derivadas en tiempo permite extraer la información de profundidad codificada en frecuencia para la amplitud de las señales derivadas en tiempo. Por ejemplo, la operación que puede realizarse en uno o más mezcladores (12) en este caso, en el que el oscilador de formación de imágenes y de referencia son el mismo, es: I lQ ÍO h / ( O - I iÁ O h q íO = p jA ÍX jft [2k1Vj + 2 ? eos (0 ) ¡u íO h / (O - I iQ (t) I2Q (t) = p ] A ( x j [2k1v¡ + 2 ? si n (0) de manera similar al enfoque de mezcla de frecuencia directa, en este caso pueden generarse los cuatro términos multiplicativos anteriores y combinarlos para dejar solo el componente de CC, o como alternativa puede filtrarse el componente de frecuencia más lta de cada uno de los términos multiplicativos usando un segundo conjunto de filtros de paso bajo (23) y mantener solo los componentes de CC que contienen la información de profundidad y Doppler en su amplitud. Para separar la información Doppler y de profundidad, puede cambiarse K en el barrido de frecuencia FMCW a lo largo del tiempo, por ejemplo, alternando su signo, y comparando los cambios de componentes de CC resultantes entre ambas pendientes de modulación. Un inconveniente de la demodulación de FM directa es el hecho de que la reflectividad del objeto (pj) y el cambio de frecuencia se mezclan en este valor de CC. Esto puede abordarse demodulando la amplitud por separado: como alternativa, en los casos donde los osciladores de formación de imágenes y de referencia son el mismo, la reflectividad del objeto puede obtenerse también a partir de los términos multiplicativos entre los componentes de señal y los componentes de referencia antes de la derivada en tiempo (por ejemplo, como se proporciona por el primer mezclador (121) y el segundo mezclador (122) en la figura 2) . Para el uso del enfoque de demodulación de FM directa, en la figura 2 se muestra un módulo de derivación de tiempo (15) y uno o más mezcladores que comprenden: - un tercer mezclador (123) , destinado a mezclar el primer componente en fase (7) y el componente en cuadratura de referencia derivado en tiempo (91) , y - un cuarto mezclador (124) , destinado a mezclar el primer componente en cuadratura (8) y el componente en cuadratura de referencia derivado en tiempo (91) . Por lo tanto, la realización en la figura 2 muestra un esquema de demodulación que proporciona demodulación de frecuencia y amplitud simultáneamente. La figura 3 muestra una implementación donde se combinan múltiples canales de formación de imágenes (3) con un canal de referencia común (4) obtenido a partir de una luz reflejada que proviene de la misma escena, pero mezclada con una fuente óptica separada (una de una longitud de onda diferente pero que es coherente con al menos na fracción de la potencia recogida de la escena) . La ventaja del esquema mostrado en la figura 3 es que los diferentes canales de formación de imágenes (3) conservan la diferencia de fase relativa (contenida en los datos IQ) en el dominio eléctrico después de la demodulación. Esto permite la combinación coherente de las señales demoduladas que provienen de dichos canales de formación de imágenes (3) con el fin de recuperar las diferentes direcciones. Para los mezcladores (12) , es posible usar diferentes esquemas de construcción. En particular, pueden implementarse en el dominio analógico sobre la base de circuitos que se basan en un esquema translineal. Uno de estos circuitos es la celda de Gilbert, que se representa en la figura 5. Este circuito tiene la ventaja de funcionar en los cuatro cuadrantes de las señales de interferencia. Ya que las entradas a la celda son siempre diferenciales y basadas en la tensión, las fotocorrientes provenientes de los receptores IQ ópticos (5, 6) anteriores deben amplificarse mediante un amplificador de transimpedancia (14) a una tensión y, si corresponde, derivarse en el dominio analógico. Esto suma complejidad a la circuitería y hace que el esquema sea más difícil de implementar cuando aumenta el número de canales. Con el fin de simplificar la celda de Gilbert, es posible usar las fotocorrientes de un par diferencial equilibrado como fuente tanto de señales de entrada como de polarización de corriente. Esto reducirá la necesidad de amplificadores de transimpedancia intermedios y hará que la celda sea más susceptible de replicación para lograr una integración a gran escala. El oscilador de formación de imágenes (111) para mezclar con los diferentes canales de imagen (3, 4) puede generarse y distribuirse como una señal de tensión sobre la matriz de detección desde una sola abertura de entrada de formación de imágenes (101) sin mayores problemas de escalabilidad. Para simplificar la lectura de la celda, pueden aplicarse esquemas de integración con condensadores conmutados y salidas de video multiplexadas como se muestra en la figura 6. La lectura de dichos condensadores conmutados puede estructurarse de la misma manera que los sensores de formación de imágenes normales, organizándolos por columna y usando los esquemas de multiplexación habituales para encaminar los valores analógicos a la circuitería ADC apropiada. Por último, con el fin de proporcionar la función de mezcla deseada, también es posible modular la amplitud del oscilador local óptico que va a los canales de formación de imágenes. Si se hace esto, no se requiere una mezcla electrónica después de la fotodetección, con ventajas obvias en términos de complejidad del sistema. Para esto, puede usarse un modulador óptico (17) , como se muestra en la figura 4. En una realización, el modulador óptico (17) es un modulador de amplitud óptica, ya sea basado en absorción electroóptica, en un interferómetro Mach-Zehnder o de otro modo. Si la modulación de amplitud deja cierto nivel de modulación de fase, puede agregarse un modulador de fase en serie para garantizar una operación de fase constante y evitar cambios de frecuencia no deseados en el canal de referencia. La modulación de amplitud también puede obtenerse de diferentes maneras, como a través de un amplificador óptico, la modulación de una corriente láser, etc. En algunas realizaciones, el primer componente en fase (7) , el primer componente en cuadratura (8) , el componente en fase de referencia (9) y el componente en cuadratura de referencia (10) necesitarían multiplicarse con diferentes versiones de la señal, cambiadas 90° entre sí con el fin de lograr el resultado matemático deseado directamente. Para lograr esto físicamente, esto requeriría la distribución de señales de referencia moduladas por separado a cada mezclador de salida (12) . Aunque es posible, esto complicaría el diseño y el encaminamiento de señal en el dispositivo, especialmente debido a que la relación de fase entre ambos osciladores ópticos de referencia modulados debe determinarse con precisión. Sin embargo, dado el hecho de que la modulación a aplicar a estos dos canales también es ortogonal en el dominio eléctrico, es posible, en algunas realizaciones, sumarlos juntos en la señal de modulación, como se muestra en la figura 4. Los productos entre el primer componente en fase (7) y el primer componente en cuadratura (8) o entre el componente en fase de referencia (9) y el componente en cuadratura de referencia (10) solo producen productos de intermodulación de alta frecuencia que pueden estar en principio filtrados. Con el fin de separar la información de amplitud y distancia, es posible conmutar la señal de modulación aplicada al modulador óptico (17) entre diferentes modos (con o sin derivada en tiempo) de tal manera que como alternativa se recupere la información de rofundidad y/o la amplitud de señal. Esta simple multiplexación en el dominio de tiempo, que es adecuada para su implementación con un integrador que está sincronizado con la conmutación de la señal de demodulación, también puede reemplazarse por otros esquemas de multiplexación (multiplexación de dominio de frecuencia, multiplexación de código, etc.) . La figura 4 muestra la combinación de las dos opciones de implementación descritas anteriormente, la demodulación de frecuencia Doppler por medio de la modulación de amplitud de la señal de referencia óptica y la multiplexación de tiempo de la demodulación de amplitud/frecuencia, para el caso de una única longitud de onda.
+ ES-2868473_A1 SISTEMA LIDAR CON CAMBIO DE FRECUENCIA DOPPLER SUPRIMIDO OBJETO DE LA INVENCIÓN El objeto de la invención es un sistema LIDAR que permite reducir o suprimir completamente el cambio de frecuencia inducido por el movimiento de los objetos en una escena en relación con el LIDAR, un efecto conocido como cambio de frecuencia Doppler. ANTECEDENTES DE LA INVENCIÓN Un dispositivo de detección y medición mediante luz (LIDAR, Light Detection and Ranging) crea un mapa de distancia a un objetivo iluminando el objetivo con luz láser y midiendo la luz reflejada con un sensor. Las diferencias en las propiedades de la luz láser, incluidos los tiempos totales de ida y vuelta, la fase o la longitud de onda, pueden usarse para realizar representaciones digitales en 3D del objetivo. Los LIDAR se usan comúnmente para realizar mapas de alta resolución, con aplicaciones en geodesia, geomática, arqueología, geografía, geología, geomorfología, sismología, silvicultura, física atmosférica, guía láser, mapeo por barrido láser aéreo (ALSM) y altimetría láser. La tecnología también se usa en el control y navegación para algunos vehículos autónomos. Algunos LIDAR hacen uso de lo que se conoce como detección coherente. En este esquema de detección, la luz reflejada en la muestra se mezcla con un oscilador local que es coherente con la luz reflejada. Este enfoque tiene varias ventajas, tal como la ganancia óptica que permite la sensibilidad de un solo fotón y permite el uso de cambios en la fase y la longitud de onda de la luz para medir la distancia. Un problema común que aparece al hacer uso de este tipo de LIDAR es el cambio de frecuencia inducido por el movimiento de los objetos en la escena en relación con el dispositivo, un efecto conocido como cambio de frecuencia Doppler. Tales cambios de frecuencia pueden ser grandes en relación con el ancho de banda de las señales usadas para medir las propiedades relevantes de los objetos y pueden complicar la extracción e dichos datos relevantes. El presente problema se vuelve de gran importancia si la velocidad relativa de los objetos es significativa, como en el caso de vehículos, aeronaves o satélites. Este cambio de frecuencia es variable y, a menudo, desconocido y puede ampliar el ancho de banda de las señales detectadas de manera muy significativa. En el caso de los vehículos terrestres, la velocidad relativa puede alcanzar los 300 km/h o más. Esta velocidad relativa corresponde a un cambio de frecuencia Doppler de 54, 0 MHz para la iluminación de A = 1, 55 pm. Este cambio de frecuencia variable complica la lectura electrónica y la cadena de procesamiento de señal de los sistemas que dependen de la detección coherente de la señal del objeto. Incluso si la cadena de señal aún puede manejarse para un pequeño número de canales, aumenta el coste, el tamaño y la complejidad del sistema LIDAR final. Además, plantea un obstáculo importante para la implementación práctica del sistema LIDAR coherente multicanal con una gran cantidad de entradas. Para resolver el problema explicado ha habido diversos enfoques, incluido uno de ellos que emplea un muestreo no uniforme u otros esquemas de detección comprimidos para reducir la velocidad de datos general de las señales. En general, todos los enfoques desarrollados tienen los mismos inconvenientes: circuitería de lectura electrónica compleja y cadena de procesamiento de señal general, lo que los hace caros, de gran tamaño y, en general, difíciles de implementar y escalar para arquitecturas multicanal con un gran número de canales. DESCRIPCIÓN DE LA INVENCIÓN El sistema LIDAR objeto de la presente invención describe una modificación de un sistema LIDAR coherente que hace uso de una o más aberturas de entrada, y que es simple en su implementación. Su objetivo es reducir o eliminar por completo el cambio de frecuencia inducido por el movimiento de los objetos en una escena en relación con el LIDAR, un efecto conocido como cambio de frecuencia Doppler. En la invención, la reducción o eliminación del cambio de frecuencia se realiza midiendo la señal cambiada Doppler en un canal de referencia y a continuación, haciendo uso de as propiedades matemáticas de la mezcla de señales en el dominio del tiempo, cambiar la frecuencia de uno o más canales de formación de imágenes para cancelar o reducir dicho cambio Doppler. Específicamente, el sistema de detección y medición mediante luz (LIDAR) con cambio de frecuencia Doppler suprimido de la presente invención comprende al menos una fuente de luz configurada para emitir una primera luz, dirigida a un objeto exterior. La primera luz se refleja de manera difusa o especular en el objeto y a continuación se recibe al menos en una abertura de entrada, siendo por lo tanto una luz reflejada. La luz reflejada puede dividirse en un divisor, colocado a continuación de la al menos una abertura de entrada, estando el divisor configurado para dividir la luz reflejada en un canal de referencia y al menos un primer canal de formación de imágenes. A continuación, una parte de la luz reflejada dividida se guía a través del al menos un primer canal de formación de imágenes a un primer receptor IQ óptico de formación de imágenes (en fase y en cuadratura, In-Phase Quadrature-Phase) asociado al primer canal de formación de imágenes. El primer receptor IQ óptico de formación de imágenes está configurado para obtener una primera señal de interferencia que comprende un primer componente en fase y un primer componente en cuadratura. Además, otra parte de la luz reflejada se guía a través del canal de referencia a un receptor IQ óptico de referencia asociado al canal de referencia. El receptor IQ óptico de referencia está configurado para obtener una señal de interferencia de referencia que comprende un componente en fase de referencia y un componente en cuadratura de referencia. Al menos un oscilador óptico local está asociado al primer receptor IQ óptico de formación de imágenes y al receptor IQ óptico de referencia y está configurado para ser temporalmente coherente con la luz reflejada. Por último, en una realización, el sistema comprende al menos un mezclador, conectado al primer receptor IQ óptico de formación de imágenes y al receptor IQ óptico de referencia, y configurado para obtener un primer producto de intermodulación con una frecuencia más alta y un segundo producto de intermodulación de interés en el que su cambio Doppler se escala o se elimina por completo. El sistema descrito anteriormente es una posible realización de la presente invención. Sin embargo, el sistema puede comprender una abertura de referencia y varias aberturas de entrada, o un canal de referencia y varios canales de formación de imágenes asociados a una o más aberturas de entrada. El sistema también puede comprender un único oscilador óptico local asociado a todos los receptores IQ ópticos, o un oscilador óptico local de referencia asociado al receptor IQ óptico de referencia y un oscilador óptico local de formación de imágenes asociado a los receptores IQ ópticos de referencia, o un oscilador óptico local de referencia asociado al receptor IQ óptico de referencia, y varios osciladores ópticos locales de formación de imágenes, asociados cada uno a uno o más receptores IQ ópticos de formación de imágenes. El sistema también puede comprender un modulador de amplitud y/o fase óptica aplicado a los osciladores ópticos locales de formación de imágenes, de tal manera que la generación de los productos de intermodulación se produce directamente en el fotodetector sin la necesidad de una mezcla electrónica. DESCRIPCIÓN DE LOS DIBUJOS Para complementar la descripción que se realiza y con el fin de ayudar a una mejor comprensión de las características de la invención, de acuerdo con un ejemplo preferido de una realización práctica de la misma, se adjunta un conjunto de dibujos como una parte integral de dicha descripción en la que, con carácter ilustrativo y no limitativo, se ha representado lo siguiente. Figura 1A.- Muestra un esquema de la abertura de entrada, los receptores IQ ópticos y los osciladores ópticos locales de referencia y de formación de imágenes en una realización de la invención. Figura 1B.- Muestra una implementación alternativa en la que se usan unos MMI de 2x4 para los receptores IQ ópticos. Figura 2.- Muestra un esquema del sistema LIDAR en una realización de la invención con un canal de referencia y un canal de formación de imágenes. Figura 3.- Muestra un esquema del sistema LIDAR en una realización de la invención con un canal de referencia y una matriz de canales de formación de imágenes con nformación de dirección codificada en la fase relativa entre los mismos. Figura 4.- Muestra un esquema del sistema LIDAR en una realización de la invención con una pluralidad de aberturas de entrada y un modulador de amplitud para la mezcla directa de la señal de referencia en los fotodetectores. Figura 5.-Muestra dos esquemas de una celda de Gilbert, uno que incluye los fotodetectores para permitir la multiplicación directa de la fotocorriente diferencial. Figura 6.- Muestra un esquema de integración de una celda de Gilbert, usando condensadores conmutados. REALIZACIÓN PREFERENTE DE LA INVENCIÓN Con la ayuda de las figuras 1A a 6, se describen a continuación las realizaciones preferentes de la presente invención. La invención se refiere a un sistema LIDAR que comprende al menos una fuente de luz configurada para emitir una primera luz, dirigida a un objeto exterior. La primera luz se refleja en el objeto y a continuación se recibe en una abertura de entrada de referencia (102) y en una abertura de entrada de formación de imágenes (101) en una primera realización de la invención, siendo una luz reflejada. La abertura de entrada de referencia (102) permite producir una señal de interferencia de referencia entre la luz reflejada procedente de la escena y un oscilador de referencia (112) . Esta señal de interferencia de referencia se usa para modular una señal de interferencia formada entre la luz reflejada que proviene de la escena recogida por la abertura de entrada de formación de imágenes (101) y un oscilador de formación de imágenes (111) . En cualquier implementación dada, la abertura de entrada de referencia (102) y la de la o las aberturas de entrada de imagen (101) pueden superponerse, como se muestra, por ejemplo, en la realización de la figura 1A, así como el oscilador de referencia (112) y los osciladores de formación de imágenes (111) . Es importante para la invención que el oscilador de referencia (112) y el oscilador de ormación de imágenes (111) muestren cierto grado de coherencia temporal con la luz reflejada, de tal manera que la señal de interferencia formada pueda procesarse a frecuencias eléctricas. En una implementación a modo de ejemplo, mostrada en la figura 1A, el sistema comprende una única abertura de entrada (101, 102) . En este caso, el sistema comprende una fuente de luz, que emite una luz dirigida a un objeto. La luz se refleja en el objeto y la luz reflejada, que entra al sistema por la abertura de entrada (101, 102) se divide en un primer canal de formación de imágenes (3) y un canal de referencia (4) por un divisor de 1x2 (2) . Es importante para la invención que los al menos dos canales, el canal de referencia (4) y el primer canal de formación de imágenes (3) , se vean afectados por el movimiento de los objetos a través del cambio de frecuencia Doppler sustancialmente de la misma manera, mientras que la modulación portadora de información no Doppler permanece diferente entre los mismos. Esto permite combinarlos de tal manera que el cambio de frecuencia Doppler se elimine o se reduzca en gran medida, mientras se recupera la modulación portadora de información. Como se muestra en la figura 1A, el primer canal de formación de imágenes (3) se alimenta a un primer receptor IQ óptico de formación de imágenes (5) , y el canal de referencia (4) se alimenta a un receptor IQ óptico de referencia (6) . El primer receptor óptico de formación de imágenes (5) está asociado a un oscilador de formación de imágenes (111) y el receptor óptico de referencia (6) está asociado a un oscilador de referencia (112) . Dentro de los receptores IQ ópticos (5, 6) , ambos osciladores (111, 112) se alimentan a través de híbridos de 90° que generan el cambio de fase necesario entre el componente en fase (7, 9) y el componente en cuadratura (8, 10) de cada canal. En otras realizaciones, los receptores IQ (5, 6) podrían implementarse por medio de acopladores MMI (Multi Mode Interference, Interferencia Multi Modo) de 2x4 diseñados para proporcionar los cambios de fase requeridos entre las 4 salidas (7, 8, 9, 10) y cada una de las dos entradas (3, 4) . En la figura 1B se muestra una realización en la que el primer receptor IQ óptico de formación de imágenes (5) es un acoplador MMI de 2x4 que se alimenta con el primer canal de formación de imágenes (3) y un oscilador de formación de imágenes (111) , y el receptor IQ óptico de referencia (6) es un acoplador MMI de 2x4 que se alimenta con el canal de referencia (4) y un oscilador de referencia (112) . En una realización, el oscilador de formación de imágenes (111) tiene su longitud de onda barrida que sigue un esquema FMCW (onda continua modulada en frecuencia, Frequency Modulated Continuous Wave) convencional y el oscilador de referencia (112) mantiene su longitud de onda estática. Para que esta implementación funcione, es importante que la luz reflejada tenga componentes que sean coherentes con ambos componentes en los osciladores (111, 112) . Para esto, la iluminación debe derivarse a partir de una combinación de ambos componentes, o ambos componentes deben compartir un origen común con la iluminación que garantice la coherencia mutua. El primer receptor IQ óptico de formación de imágenes (5) está asociado al primer canal de formación de imágenes (3) y está configurado para obtener una primera señal de interferencia que comprende un primer componente en fase (7) y un primer componente en cuadratura (8) . El receptor IQ óptico de referencia (6) está asociado al canal de referencia (4) y configurado para obtener una señal de interferencia de referencia que comprende un componente en fase de referencia (9) y un componente en cuadratura de referencia (10) . Ambas señales de interferencia se verán afectadas por el efecto Doppler sustancialmente de la misma manera (con pequeñas diferencias debido a las diferentes longitudes de onda, en algunas realizaciones) . Sin embargo, solo la primera señal de interferencia, asociada al oscilador de formación de imágenes (111) , transporta información sobre la distancia del objeto al sistema LIDAR en su frecuencia de interferencia. La mezcla de ambas señales, la primera señal de interferencia y la señal de referencia, en al menos un mezclador (12) , da como resultado la generación de dos productos de intermodulación: un primer producto de intermodulación con mayor frecuencia que puede descartarse, y un producto de intermodulación de salida (16) con menor frecuencia, que tiene su cambio Doppler escalado significativamente, y que proporciona la posibilidad de llevar la información de medición y amplitud a la banda base, y de este modo minimizar la frecuencia de muestreo y la complejidad de lectura electrónica. Por ejemplo, a continuación se derivan la primera señal de interferencia y la señal de interferencia de referencia para esta implementación. Se supone que la abertura de ntrada de formación de imágenes (101) y la abertura de referencia (102) están sustancialmente en la misma posición, excepto por posibles cambios de fase relativos si la abertura de entrada de formación de imágenes (101) es parte de una matriz. En el caso de una iluminación igual de la escena con dos fuentes de luz de dos longitudes de onda (con números de onda asociados y frecuencias angulares k1, k 2 y &>2> respectivamente) e igual amplitud A, la señal de luz a una distancia x de la fuente de luz es: donde se supone que la primera longitud de onda de la primera fuente de luz del sistema LIDAR se somete a una modulación de frecuencia lineal con constante K. Si el objeto que refleja la luz emitida por la primera fuente de luz es un único reflector difuso, el objeto, a una distancia x¡ con reflectividad de intensidad p¡ en la dirección de la abertura de entrada (101) y la velocidad relativa en la dirección entre la abertura de entrada (101) y el objeto v j, el campo reflejado de la luz recogida en la abertura de entrada (101) será: dónde í es el índice de la apertura de entrada en el caso de que haya una matriz de los mismos. El cambio Doppler es visible en los términos 2k1vj y 2k2vj en las ecuaciones, modificando la frecuencia de la luz reflejada. Para el cálculo de las señales de interferencia en los receptores IQ ópticos (5, 6) , se supone por simplicidad que los dos componentes de longitud de onda de los osciladores de referencia y de formación de imágenes (111, 112) tienen una amplitud de unidad: E X i ( t ) = [ e - j ( ^ i t + n K t 2+ ^ 1) ] Ex2 (t) = e -AW2t + 02) después del receptor IQ óptico de formación de imágenes (5) y el receptor IQ óptico de referencia (6) , la primera señal de interferencia y la señal de interferencia de referencia son, respectivamente: En estos, los productos de batido donde persiste la diferencia de frecuencias angulares ópticas estarán en una frecuencia muy alta para los estándares eléctricos una vez detectados. Por ejemplo, suponiendo que las dos longitudes de onda de la luz de las fuentes de luz están separadas 0, 1 nm a una longitud de onda de 1, 55 pm, el producto de intermodulación tiene una frecuencia de 12, 5 GHz: por el contrario, los productos de batido donde el oscilador local y las frecuencias de luz reflejada son iguales, se demodulan a una frecuencia más baja, derivada a partir de la diferencia de frecuencia entre la frecuencia de modulación de fase emitida y recibida más o menos el cambio Doppler. Para la velocidad típica de los vehículos terrestres, el cambio Doppler será igual o inferior a 100 MHz, por lo que es posible suprimir los términos de mezcla de frecuencias más altas (aquellos que incluyen la diferencia de las frecuencias angulares ópticas) por medio de un filtro de paso bajo. Por lo tanto, como se muestra en la figura 2, puede asociarse un primer conjunto de filtros de paso bajo (13) a los receptores IQ ópticos (5, 6) con el fin de filtrar el primer componente en fase (7) , el primer componente en cuadratura (8) , el componente en fase de referencia (9) y el componente en cuadratura de referencia (10) . A continuación, solo nos centraremos en las componentes de baja frecuencia de las señales de interferencia: La información de profundidad y velocidad está codificada en la frecuencia (y fase) de ambas fotocorrientes. Si nos centramos solo en la información de frecuencia, vemos que las frecuencias de It (t) y /2 (t) son: los componentes de estos dos cambios de frecuencia se escalan de manera diferente con la velocidad de línea. La constante de modulación K tiene un impacto directo en la distancia-frecuencias derivadas. Sin embargo, el cambio Doppler permanece independiente y está determinado únicamente por las propiedades de la escena. Ya que el cambio Doppler puede subir a frecuencias de varias decenas de MHz, requiere una electrónica de adquisición rápida, lo que puede sumarse al coste del sistema. Estas frecuencias de video también son un problema cuando se trata de ampliar la detección de escena con múltiples canales de formación de imágenes paralelos (3) . Sin embargo, observamos que la diferencia de estas dos frecuencias es: si las dos longitudes de onda de las luces emitidas por las dos fuentes de luz se eligen para estar cerca una de otra (por ejemplo, una separación de 0, 1 nma una longitud de onda de 1, 55 pm) , la diferencia de los cambios de frecuencia Doppler se reduce significativamente (2 kHz para una v¡ de 50m /s) . Sin embargo, es digno de mención que ambas longitudes de onda pueden ser iguales. En este caso, el cambio Doppler se suprime totalmente, mientras que se conserva el cambio de frecuencia debido a FMCW. Este enfoque simplifica el sistema óptico necesario y la circuitería electro-óptica asociada. Si ambas longitudes de onda son iguales, el cambio Doppler se suprime totalmente y la frecuencia de la señal se mueve a la banda base. Esta frecuencia Doppler más baja permite una reducción significativa de la velocidad de línea, el rendimiento de datos y la complejidad del hardware en sistemas donde se desea una gran cantidad de aperturas de entrada (101) . Si la frecuencia Doppler se conserva y debe medirse, es necesario que haya una manera de eliminar la ambigüedad del cambio Doppler de la modulación FMCW. Una forma de lograr esto es cambiar K en el barrido de frecuencia FMCW a lo largo del tiempo, por ejemplo, alternando su signo, y comparando los cambios de frecuencia eléctrica resultantes entre ambas pendientes de modulación. Una forma de restar las frecuencias obtenidas a partir de los receptores IQ ópticos (5, 6) anteriores es multiplicar una de las corrientes con el conjugado complejo del otro. Pueden aplicarse técnicas de mezcla de frecuencias convencionales. Esto puede hacerse en el dominio digital o analógico y potencialmente sobre la base de las señales de interferencia como se indica a continuación: fl (0 * ^ (0 Un * Uí + hq * hq) + i Un * ¡2q hq * Uí) en una realización, esto puede implementarse, como se muestra en la figura 2, usando uno o más mezcladores (12) conectados al primer IQ óptico de formación de imágenes (5) y a las salidas IQ ópticas de referencia (6) o a las primeras salidas del conjunto de filtros de paso bajo (13) . Cada uno de los cuatro términos multiplicativos anteriores contiene un primer producto de intermodulación con la diferencia de frecuencias A / (baja frecuencia) y un segundo producto de intermodulación que incluye la adición de las frecuencias Doppler 2v¡ ( + ) . Cuando se combinan los cuatro términos multiplicativos, los términos relacionados con la adición de frecuencias Doppler se cancelan, y solo los productos de intermodulación de baja frecuencia, que contienen la información de profundidad en su frecuencia (como por A / anterior) , permanecen como productos de intermodulación de salida (16) . Alternativamente, como alternativa, se puede filtrar el componente de frecuencia más alta de cada uno de los términos multiplicativos usando un segundo conjunto de filtros de paso bajo (23) y mantener solo los productos de intermodulación de baja frecuencia, que contienen la información de profundidad en su frecuencia (como por A f anterior) , omo productos de intermodulación de salida (16) . En la realización mostrada en la figura 2, el o los mezcladores (12) comprenden: - un primer mezclador (121) , destinado a mezclar el primer componente en cuadratura (8) y el componente en fase de referencia (9) , proporcionando el término multiplicativo (Ilq * l 2i) , y - un segundo mezclador (122) , destinado a mezclar el primer componente en fase (7) y el componente en fase de referencia (9) , proporcionando el término multiplicativo (71 * I2i) . En una técnica de demodulación alternativa, puede trabajarse con los componentes individuales de las señales de interferencia, es decir, el primer componente en fase (7) , el primer componente en cuadratura (8) y las derivadas de las señales de interferencia de referencia, como se proporciona por un módulo de derivación de tiempo (15) : la derivada en tiempo del componente en fase de referencia (90) y la derivada en tiempo del componente en cuadratura de referencia (91) , y adaptarse las técnicas de demodulación de FM que realizan simultáneamente la conversión y demodulación de banda base. Esto puede ser específicamente útil en realizaciones donde sean iguales tanto el oscilador de formación de imágenes como el oscilador de referencia, ya que en esa situación la diferencia de frecuencia en los términos multiplicativos como se expresó anteriormente sería A f = 0, y el uso de derivadas en tiempo permite extraer la información de profundidad codificada en frecuencia para la amplitud de las señales derivadas en tiempo. Por ejemplo, la operación que puede realizarse en uno o más mezcladores (12) en este caso, en el que el oscilador de formación de imágenes y de referencia son el mismo, es: I lQ ÍO h / ( O - I iÁ O h q íO = p jA ÍX jft [2k1Vj + 2 ? eos (0 ) ¡u íO h / (O - I iQ (t) I2Q (t) = p ] A ( x j [2k1v¡ + 2 ? si n (0) de manera similar al enfoque de mezcla de frecuencia directa, en este caso pueden generarse los cuatro términos multiplicativos anteriores y combinarlos para dejar solo el componente de CC, o como alternativa puede filtrarse el componente de frecuencia más lta de cada uno de los términos multiplicativos usando un segundo conjunto de filtros de paso bajo (23) y mantener solo los componentes de CC que contienen la información de profundidad y Doppler en su amplitud. Para separar la información Doppler y de profundidad, puede cambiarse K en el barrido de frecuencia FMCW a lo largo del tiempo, por ejemplo, alternando su signo, y comparando los cambios de componentes de CC resultantes entre ambas pendientes de modulación. Un inconveniente de la demodulación de FM directa es el hecho de que la reflectividad del objeto (pj) y el cambio de frecuencia se mezclan en este valor de CC. Esto puede abordarse demodulando la amplitud por separado: como alternativa, en los casos donde los osciladores de formación de imágenes y de referencia son el mismo, la reflectividad del objeto puede obtenerse también a partir de los términos multiplicativos entre los componentes de señal y los componentes de referencia antes de la derivada en tiempo (por ejemplo, como se proporciona por el primer mezclador (121) y el segundo mezclador (122) en la figura 2) . Para el uso del enfoque de demodulación de FM directa, en la figura 2 se muestra un módulo de derivación de tiempo (15) y uno o más mezcladores que comprenden: - un tercer mezclador (123) , destinado a mezclar el primer componente en fase (7) y el componente en cuadratura de referencia derivado en tiempo (91) , y - un cuarto mezclador (124) , destinado a mezclar el primer componente en cuadratura (8) y el componente en cuadratura de referencia derivado en tiempo (91) . Por lo tanto, la realización en la figura 2 muestra un esquema de demodulación que proporciona demodulación de frecuencia y amplitud simultáneamente. La figura 3 muestra una implementación donde se combinan múltiples canales de formación de imágenes (3) con un canal de referencia común (4) obtenido a partir de una luz reflejada que proviene de la misma escena, pero mezclada con una fuente óptica separada (una de una longitud de onda diferente pero que es coherente con al menos na fracción de la potencia recogida de la escena) . La ventaja del esquema mostrado en la figura 3 es que los diferentes canales de formación de imágenes (3) conservan la diferencia de fase relativa (contenida en los datos IQ) en el dominio eléctrico después de la demodulación. Esto permite la combinación coherente de las señales demoduladas que provienen de dichos canales de formación de imágenes (3) con el fin de recuperar las diferentes direcciones. Para los mezcladores (12) , es posible usar diferentes esquemas de construcción. En particular, pueden implementarse en el dominio analógico sobre la base de circuitos que se basan en un esquema translineal. Uno de estos circuitos es la celda de Gilbert, que se representa en la figura 5. Este circuito tiene la ventaja de funcionar en los cuatro cuadrantes de las señales de interferencia. Ya que las entradas a la celda son siempre diferenciales y basadas en la tensión, las fotocorrientes provenientes de los receptores IQ ópticos (5, 6) anteriores deben amplificarse mediante un amplificador de transimpedancia (14) a una tensión y, si corresponde, derivarse en el dominio analógico. Esto suma complejidad a la circuitería y hace que el esquema sea más difícil de implementar cuando aumenta el número de canales. Con el fin de simplificar la celda de Gilbert, es posible usar las fotocorrientes de un par diferencial equilibrado como fuente tanto de señales de entrada como de polarización de corriente. Esto reducirá la necesidad de amplificadores de transimpedancia intermedios y hará que la celda sea más susceptible de replicación para lograr una integración a gran escala. El oscilador de formación de imágenes (111) para mezclar con los diferentes canales de imagen (3, 4) puede generarse y distribuirse como una señal de tensión sobre la matriz de detección desde una sola abertura de entrada de formación de imágenes (101) sin mayores problemas de escalabilidad. Para simplificar la lectura de la celda, pueden aplicarse esquemas de integración con condensadores conmutados y salidas de video multiplexadas como se muestra en la figura 6. La lectura de dichos condensadores conmutados puede estructurarse de la misma manera que los sensores de formación de imágenes normales, organizándolos por columna y usando los esquemas de multiplexación habituales para encaminar los valores analógicos a la circuitería ADC apropiada. Por último, con el fin de proporcionar la función de mezcla deseada, también es posible modular la amplitud del oscilador local óptico que va a los canales de formación de imágenes. Si se hace esto, no se requiere una mezcla electrónica después de la fotodetección, con ventajas obvias en términos de complejidad del sistema. Para esto, puede usarse un modulador óptico (17) , como se muestra en la figura 4. En una realización, el modulador óptico (17) es un modulador de amplitud óptica, ya sea basado en absorción electroóptica, en un interferómetro Mach-Zehnder o de otro modo. Si la modulación de amplitud deja cierto nivel de modulación de fase, puede agregarse un modulador de fase en serie para garantizar una operación de fase constante y evitar cambios de frecuencia no deseados en el canal de referencia. La modulación de amplitud también puede obtenerse de diferentes maneras, como a través de un amplificador óptico, la modulación de una corriente láser, etc. En algunas realizaciones, el primer componente en fase (7) , el primer componente en cuadratura (8) , el componente en fase de referencia (9) y el componente en cuadratura de referencia (10) necesitarían multiplicarse con diferentes versiones de la señal, cambiadas 90° entre sí con el fin de lograr el resultado matemático deseado directamente. Para lograr esto físicamente, esto requeriría la distribución de señales de referencia moduladas por separado a cada mezclador de salida (12) . Aunque es posible, esto complicaría el diseño y el encaminamiento de señal en el dispositivo, especialmente debido a que la relación de fase entre ambos osciladores ópticos de referencia modulados debe determinarse con precisión. Sin embargo, dado el hecho de que la modulación a aplicar a estos dos canales también es ortogonal en el dominio eléctrico, es posible, en algunas realizaciones, sumarlos juntos en la señal de modulación, como se muestra en la figura 4. Los productos entre el primer componente en fase (7) y el primer componente en cuadratura (8) o entre el componente en fase de referencia (9) y el componente en cuadratura de referencia (10) solo producen productos de intermodulación de alta frecuencia que pueden estar en principio filtrados. Con el fin de separar la información de amplitud y distancia, es posible conmutar la señal de modulación aplicada al modulador óptico (17) entre diferentes modos (con o sin derivada en tiempo) de tal manera que como alternativa se recupere la información de rofundidad y/o la amplitud de señal. Esta simple multiplexación en el dominio de tiempo, que es adecuada para su implementación con un integrador que está sincronizado con la conmutación de la señal de demodulación, también puede reemplazarse por otros esquemas de multiplexación (multiplexación de dominio de frecuencia, multiplexación de código, etc.) . La figura 4 muestra la combinación de las dos opciones de implementación descritas anteriormente, la demodulación de frecuencia Doppler por medio de la modulación de amplitud de la señal de referencia óptica y la multiplexación de tiempo de la demodulación de amplitud/frecuencia, para el caso de una única longitud de onda.
Publicaciones:
ES2868473 (21/10/2021) - A1 Solicitud de patente con informe sobre el estado de la técnica
ES2868473 (28/02/2022) - B2 Patente de invención con examen
Eventos:
En fecha 21/04/2020 se realizó Registro Instancia de Solicitud
En fecha 21/04/2020 se realizó Admisión a Trámite
En fecha 21/04/2020 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 29/04/2020 se realizó Superado examen de oficio
En fecha 29/06/2020 se realizó Realizado IET
En fecha 30/06/2020 se realizó 1109P_Comunicación Traslado del IET
En fecha 21/10/2021 se realizó Publicación Solicitud
En fecha 21/10/2021 se realizó Publicación Folleto Solicitud con IET (A1)
En fecha 18/01/2022 se realizó PETEX_Petición de examen sustantivo
En fecha 07/02/2022 se realizó Validación petición y/o pago de examen sustantivo conforme
En fecha 13/02/2022 se realizó No existen objeciones a la concesión de la solicitud
En fecha 13/02/2022 se realizó Finalización de Examen Sustantivo
En fecha 13/02/2022 se realizó 6121P_Comunicación finalización de examen sustantivo
En fecha 18/02/2022 se realizó Publicación finalización de examen sustantivo
En fecha 21/02/2022 se realizó Concesión con examen sustantivo
En fecha 21/02/2022 se realizó Entrega título
En fecha 21/02/2022 se realizó 6125P_Notificación de concesión con examen sustantivo
En fecha 28/02/2022 se realizó Publicación concesión Patente
En fecha 28/02/2022 se realizó Publicación Folleto Concesión
En fecha 29/08/2022 se realizó Plazo expirado presentación de oposiciones contra la concesión de la Patente
Pagos:
21/04/2020 - Pago Tasas IET
13/05/2022 - Pago 03 Anualidad
10/05/2023 - Pago 04 Anualidad
Fuente de la información
Parte de la información aquí publicada es pública puesto que ha sido obtenida de la Oficina de Propiedad Industrial de los diferentes países el 25/04/2024 y por lo tanto puede ser que la información no esté actualizada.Parte de la información aquí mostrada ha sido calculada por nuestro sistema informático y puede no ser veraz.
Privacidad
Si considera que al información aquí publicada afecta a su privacidad y desea que eliminemos la información aquí publicada envíe un email a info@patentes-y-marcas.com o rellene el formulario que encontrará aquí.Información sobre el registro de patente nacional por Sistema LIDAR con cambio de frecuencia Doppler suprimido con el número P202030326
El registro de patente nacional por Sistema LIDAR con cambio de frecuencia Doppler suprimido con el número P202030326 fue solicitada el 21/04/2020. Se trata de un registro en España por lo que este registro no ofrece protección en el resto de países. El registro Sistema LIDAR con cambio de frecuencia Doppler suprimido con el número P202030326 fue solicitada por MOURO LABS S.L. mediante los servicios del agente Ángel Pons Ariño. El registro [modality] por Sistema LIDAR con cambio de frecuencia Doppler suprimido con el número P202030326 está clasificado como G01S 17/02,G01S 7/48 según la clasificación internacional de patentes.
Otras invenciones solicitadas por Mouro Labs S.L.
Es posible conocer todas las invenciones solicitadas por Mouro Labs S.L. entre las que se encuentra el registro de patente nacional por Sistema LIDAR con cambio de frecuencia Doppler suprimido con el número P202030326. Si se desean conocer más invenciones solicitadas por Mouro Labs S.L. clicar aquí.Otras invenciones solicitadas en la clasificación internacional de patentes G01S 17/02,G01S 7/48.
Es posible conocer invenciones similares al campo de la técnica se refiere. El registro de patente nacional por Sistema LIDAR con cambio de frecuencia Doppler suprimido con el número P202030326 está clasificado con la clasificación G01S 17/02,G01S 7/48 por lo que si se desea conocer más registros con la clasificación G01S 17/02,G01S 7/48 clicar aquí.Otras invenciones solicitadas a través del representante ÁNGEL PONS ARIÑO
Es posible conocer todas las invenciones solicitadas a través del agente ÁNGEL PONS ARIÑO entre las que se encuentra el registro patente nacional por Sistema LIDAR con cambio de frecuencia Doppler suprimido con el número P202030326. Si se desean conocer más invenciones solicitadas a través del agente ÁNGEL PONS ARIÑO clicar aquí.Patentes en España
Es posible conocer todas las invenciones publicadas en España entre las que se encuentra el registro patente nacional por Sistema LIDAR con cambio de frecuencia Doppler suprimido. Nuestro portal www.patentes-y-marcas.com ofrece acceso a las publicaciones de patentes en España. Conocer las patentes registradas en un país es importante para saber las posibilidades de fabricar, vender o explotar una invención en España.Patentes registradas en la clase G
Es posible conocer todas las patentes registradas en la clase G (FISICA) entre las que se encuentra la patente Sistema LIDAR con cambio de frecuencia Doppler suprimido con el número P202030326. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase G01
Es posible conocer todas las patentes registradas en la clase G01 (METROLOGIA; ENSAYOS) entre las que se encuentra la patente Sistema LIDAR con cambio de frecuencia Doppler suprimido con el número P202030326. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase G01S
Es posible conocer todas las patentes registradas en la clase G01S (LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOC) entre las que se encuentra la patente Sistema LIDAR con cambio de frecuencia Doppler suprimido con el número P202030326. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.
¿Tienes alguna duda?
Escribe tu consulta y te responderemos rápida y gratuitamente.

Otras patentes similares

 P202030325
P202030325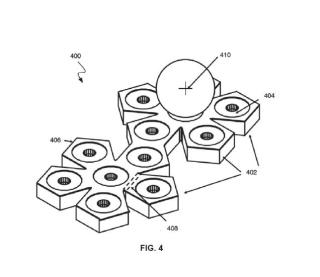 P202030328
P202030328
Uso de ésteres de (Z)-3-hexenilo y método para proteger plantas frente a plagas
P202030330Profesionales Recomendados
Barcelona
933182440
España
933182440
España

Barcelona
+34 93 362 16 97
España
+34 93 362 16 97
España

Barcelona
932 593 600
España
932 593 600
España







