


- Home /
- Publicaciones de patentes /
- SISTEMA DE GUIADO DE UN VEHÍCULO ESCLAVO DE CARGA Y VEHÍCULO ESCLAVO DE CARGA QUE LO COMPRENDE
Patente nacional por "SISTEMA DE GUIADO DE UN VEHÍCULO ESCLAVO DE CARGA Y VEHÍCULO ESCLAVO DE CARGA QUE LO COMPRENDE"
Este registro ha sido solicitado por
AR-VR MEIFUS ENGINEERING S.L.
a través del representanteISABEL CARVAJAL Y URQUIJO
Contacto
- Estado: A punto de caducar
- País:
- España
- Fecha solicitud:
- 07/04/2022
- Número solicitud:
-
P202230315
- Número publicación:
-
ES2953908
- Fecha de concesión:
-
- Inventores:
-
Persona física
- Datos del titular:
-
AR-VR MEIFUS ENGINEERING S.L.
- Datos del representante:
-
Isabel Carvajal y Urquijo
- Clasificación Internacional de Patentes:
- B25J 17/00,B25J 3/00,B62D 53/00,B60D 99/00
- Clasificación Internacional de Patentes de la publicación:
- B25J 17/00,B25J 3/00,B62D 53/00,B60D 99/00
- Fecha de vencimiento:
Quiero registrar una patente

Reivindicaciones:
+ ES-2953908_A11. Sistema de guiado de un vehículo esclavo (9) de carga que comprende: un elemento de guiado (21) configurado para aplicar una fuerza externa; un primer miembro (22) configurado para recibir el elemento de guiado (21) ; un segundo miembro (23) que comprende un alojamiento (16) con capacidad para recibir el primer miembro (22) ; un mecanismo autocentrante configurado para mantener, en ausencia de la fuerza externa, al primer miembro (22) en una posición de referencia dentro del alojamiento (16) del segundo miembro (23) ; una pluralidad de sensores (7) , donde cada sensor (7) está configurado para medir un cambio de posición del primer miembro (22) respecto del segundo miembro (23) ; una interfaz (28) configurada para recibir cada cambio de posición medido por un sensor (7) y determinar una dirección y un sentido para la fuerza externa aplicada y generar una instrucción de acuerdo con dicha dirección y dicho sentido, donde la instrucción es para accionar al menos un motor (29) asociado al vehículo esclavo (9) . 2. Sistema de guiado según la reivindicación 1, donde el mecanismo autocentrante comprende una pluralidad de elementos elásticos (5) distribuidos en una pluralidad de localizaciones del alojamiento (16) , donde los elementos elásticos (5) conectan el primer miembro (22) con el segundo miembro (23) , de manera que el primer miembro (22) es movible dentro del alojamiento (16) a causa de la fuerza externa, y en ausencia de dicha fuerza externa queda en una posición fija de referencia. 3. Sistema de guiado según la reivindicación 1, donde el mecanismo autocentrante comprende una pluralidad de elementos magnéticos distribuidos para sustentar, mediante repulsión magnética, el primer miembro (22) en el alojamiento (16) del segundo miembro (23) , de manera que el primer miembro (22) es movible dentro del alojamiento (16) a causa de la fuerza externa, y en ausencia de dicha fuerza externa queda en una posición fija de referencia. 4. Sistema de guiado según una cualquiera de las reivindicaciones 1 a 3, donde la interfaz (28) está configurada para procesar el cambio de posición del primer miembro (22) respecto del segundo miembro (23) y asignar una magnitud a la fuerza externa aplicada según el cambio de posición. 5. Sistema de guiado según la reivindicación 4, donde la interfaz (28) está configurada para generar un primer tipo de instrucción para un primer motor asociado a un movimiento motriz del vehículo esclavo (9) , y un segundo tipo de una instrucción para un segundo motor asociado un movimiento directriz del vehículo esclavo (9) . 6. Sistema de guiado según la reivindicación 5, donde la interfaz (28) está configurada para identificar la presencia de un equipo auxiliar montado por el vehículo esclavo (9) con un tercer motor asociado al equipo auxiliar, y donde la interfaz (28) además está configurada para generar un tercer tipo de instrucción para controlar el tercer motor. 7. Sistema de guiado según una cualquiera de las reivindicaciones 1 a 6, donde el elemento de guiado (21) está configurado para unirse con el vehículo esclavo (9) ; donde el primer miembro (22) comprende un disco anular (2) ; donde el segundo miembro (23) comprende una tapa anular (6) y una carcasa (3) , donde el disco anular (2) es flotante dentro de la carcasa (3) mediante los elementos elásticos (5) , donde los elementos elásticos (5) que están distribuidos y conectan la parte exterior del disco anular (2) con la parte interior de la carcasa (3) . 8. Sistema de guiado según una cualquiera de las reivindicaciones 1 a 7, donde el elemento de guiado (21) es conectable con un bulón (14) de un vehículo maestro (13) , donde el vehículo maestro (13) está configurado para moverse y aplicar una fuerza externa sobre el elemento de guiado (21) . 9. Sistema de guiado según la reivindicación 8, donde, si el vehículo esclavo (9) y el vehículo maestro (13) se alimentan cada uno con una batería eléctrica, la interfaz (28) está configurada para monitorizar el nivel de carga de cada batería, y para generar una instrucción para recargar la batería eléctrica de carga menor con la batería de carga mayor, si la carga mayor supera un umbral. 10. Sistema de guiado según una cualquiera de las reivindicaciones 1 a 8, donde el elemento de guiado (21) es conectable a un tirador (15) para aplicar manualmente una fuerza externa. 11. Sistema de guiado según las reivindicaciones 5 y 10, donde el tirador (15) comprende uno o más botones (17) para ser accionados por un usuario, donde, en ausencia de fuerza externa aplicada al mecanismo autocentrante, se genera un tercer tipo de instrucción en la interfaz (28) para actuar sobre el tercer motor asociado al equipo auxiliar. 12. Vehículo esclavo (9) de carga que comprende el sistema de guiado según una cualquiera de las reivindicaciones 1 a 11.
Los productos y servicios protegidos por este registro son:
B25J 17/00 - B25J 3/00 - B62D 53/00 - B60D 99/00
Descripciones:
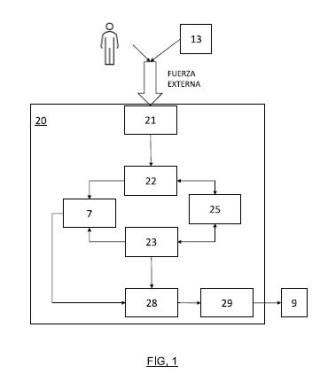
+ ES-2953908_A1 Sistema de guiado de un vehículo esclavo de carga y vehículo esclavo de carga que lo comprende Campo técnico de la invención La invención pertenece a los asistentes de guiado adaptados para dirigir un vehículo y controlar su movimiento. La invención se refiere a un sistema para guiar un vehículo, preferentemente industrial. Concretamente, para guiar un vehículo motorizado de carga mediante un mecanismo que, acoplado en el vehículo, traduce un movimiento relativo de una pieza alrededor de otra pieza en un movimiento del vehículo. Así permite fijar dirección y velocidad con las que debe moverse el vehículo. La fuerza que sirve para guiar el vehículo de carga puede ser aplicada de forma manual o por otro vehículo maestro. Estado de la Técnica Los mecanismos conocidos para dirigir un vehículo tienen algunas limitaciones y problemas. Por ejemplo, para diferentes tipos de carga las empresas deben contar con diferentes tipos de vehículos que condicionan mucho la versatilidad y escalabilidad. Es habitual que estos vehículos sean de tipo esclavo, es decir, vehículos diseñados para ser dirigidos o guiados externamente, bien mediante un dispositivo electrónico de control remoto, bien manualmente mediante un mando mecánico o electro-mecánico. Se observa que tales mecanismos son generalmente complejos y específicos de cada fabricante e incompatibles entre sí. Se advierte que ello repercute en una escasa capacidad en la actualización y adaptación de los vehículos industriales. Un caso particular, donde el problema anterior se acentúa, es con vehículos robotizados de carga, por ejemplo, de tipo AMR (Automated Mobile Robot) . Una planta industrial que use un AMR concreto, está condicionada a trabajar con dispositivos del mismo fabricante y en las condiciones configuradas inicialmente de carga y/o elevación. Para cargas especiales, los AMR de mercado son caros ya que precisan ser fabricados específicamente. Por ejemplo, cargas que son de gran peso, de longitud superior a pallet o que deban elevarse a diferentes alturas. Además, cualquier redimensión de las cargas con las que trabaja el AMR y para las que está diseñado, supone a menudo la necesidad de cambiar completamente el vehículo. Breve descripción de la invención Sería deseable un sistema que resuelva o al menos mitigue las limitaciones y problemas observados en el estado de la técnica. La presente invención propone en su forma más general un sistema de guiado de un vehículo esclavo motorizado de carga, o simplemente vehículo esclavo, según la reivindicación independiente. Realizaciones particulares se definen en las reivindicaciones dependientes. También es objeto de la invención un vehículo esclavo que comprende el sistema de guiado y que se combina con un diseño modular capaz de montar diversos equipos auxiliares para operar en el entorno industrial. Se mejora la versatilidad gracias a la capacidad de transformar de manera sencilla, según un esquema estandarizable de acoplamiento, un vehículo esclavo según las necesidades de cada empresa. El vehículo esclavo con el sistema de guiado puede ser conducido mediante un vehículo maestro o con un elemento de guiado manual que denominamos tirador. Breve descripción de las figuras FIG. 1 es un diagrama simplificado de bloques del sistema de guiado. FIG. 2A es un ejemplo de realización del sistema de guiado visto desde abajo. FIG. 2B es un ejemplo de realización del sistema de guiado según un despiece. FIG. 3A es un ejemplo de realización de un vehículo compuesto por un maestro más un esclavo acoplados ambos mediante el sistema de guiado con un accesorio elevador. FIG. 3B es un ejemplo de funcionamiento del sistema de guiado en un vehículo compuesto con un accesorio elevador. FIG. 4A es un ejemplo de realización de un vehículo compuesto con un bulón acoplado con el sistema de guiado ubicado en su parte superior. FIG. 4B es un ejemplo de realización de un vehículo compuesto con una plataforma que monta un accesorio elevador y que es conducido gracias al sistema de guiado. FIG. 4C es una ampliación de la unión del sistema de guiado entre el vehículo esclavo y el vehículo maestro del ejemplo de realización de la FIG. 4B. FIG. 4D es un corte del ejemplo de realización de la FIG. 4B. FIG. 5A es un ejemplo de realización, visto desde abajo, del sistema de guiado de una plataforma con sistema de elevación en un vehículo esclavo. FIG. 5B es un ejemplo de realización del sistema de guiado de una plataforma con sistema de elevación controlado manualmente por un tirador. LISTADO DE REFERENCIAS NUMÉRICAS 1 Orificio para bulón. 2 Disco anular. 3 Carcasa. 4 Agujeros para fijación. 5 Resorte. 6 Cuerpo fijo. 7 Sensores. 8 Arandela de fricción. 9 Vehículo esclavo. 10 Ruedas directrices del vehículo esclavo. 11 Ruedas motrices del vehículo esclavo. 12 Elemento elevador (equipo auxiliar del vehículo esclavo) . 13 Vehículo maestro. 14 Bulón del vehículo maestro. 15 Tirador. 16 Alojamiento (con holgura de recorrido) . 17 Botones del tirador. 19 Vehículo compuesto. 20 Sistema de guiado. 21 Elemento de guiado. 22 Primer miembro. 23 Segundo miembro. 25 Elemento elástico. 28 Interfaz. 29 Motor Descripción detallada de la invención Con referencia a las figuras anteriores, se describen, con fines ilustrativos sin carácter limitante, varios ejemplos de realización y diversos aspectos de la invención. La FIG. 1 representa esquemáticamente mediante bloques un sistema de guiado 20 de un vehículo esclavo 9. A través de un elemento de guiado 21, por ejemplo, un bulón o un perno o algún otro mecanismo similar, se puede aplicar una fuerza externa sobre el propio sistema 20. Puede hacerse de forma manual por un usuario, generalmente un operario industrial. También puede hacerse a través de un vehículo maestro 13 acoplado con sistema 20 (y por tanto con el vehículo esclavo 9) . Ambas posibilidades están contempladas. El sistema de guiado 20 incluye dos miembros que cooperan entre sí. Un primer miembro 22 está formado por una pieza adaptada para recibir el elemento de guiado 21, por ejemplo, uniéndose mecánicamente a él. El sistema 20 incluye un segundo iembro 23 que está formado por una pieza con un alojamiento practicado en su interior. Dicho alojamiento está destinado a contener, al menos parcialmente, el primer miembro 22 (véanse realizaciones del alojamiento en figuras posteriores bajo referencia numérica 16) . De esta forma, las dimensiones del alojamiento deben asegurar cierto margen para el desplazamiento interno del primer miembro 22 en varias direcciones en un plano. Tales direcciones son las que debe replicar en su movimiento el vehículo esclavo 9. Para ello, la dirección en la que se mueve el primer miembro 22 debe ser traducida a una instrucción para controlar uno o más motores 29 del vehículo esclavo 9 reproduciendo un movimiento como el que se desea realizar mediante la aplicación de la fuerza externa. Una interfaz 28 realiza la traducción. Como se ha indicado, el primer miembro 22 debe ser movible respecto del segundo miembro 23, que lo alberga al menos en parte. También, debe ser capaz de volver a una posición original de referencia en ausencia de fuerza externa. A tal efecto, se necesita un mecanismo autocentrante, instalado entre ambos miembros. Este mecanismo autocentrante contrarresta un desplazamiento relativo entre miembros causado por una fuerza externa, de forma que, al cesar ésta, regrese a su posición de referencia. Hay varias formas de realizar este mecanismo centrador. Por ejemplo, están previstos una serie de elementos autocentrantes distribuidos por el alojamiento. De manera que, si finaliza la fuerza externa, el primer miembro 22 recupera su posición de referencia en el alojamiento. Una opción para los elementos autocentrantes es emplear elementos elásticos (véanse figuras posteriores bajo referencia numérica 5) que sujetan elásticamente el primer miembro 22 al segundo miembro 23. Otra opción equivalente es a través de elementos magnéticos (imanes permanentes o dispositivos electro-magnéticos) que sustentan el primer miembro 22 dentro del segundo miembro 23. Un elemento autocentrante magnético tiene un polo en el primer miembro 22 enfrentado (en línea) a otro polo en el segundo miembro 23, ambos polos proximales con igual polaridad (N-N o S-S) para que se repelan. Se distribuyen de forma que unos elementos magnéticos compensen a otros. Resultando así, que el primer miembro 22 flota o levita dentro del alojamiento del segundo miembro 23. Lo principal de ambas opciones es que permiten identificar la presencia de una fuerza externa, puesto que el primer miembro 22 cambia de posición, de una posición de eferencia a una posición indicativa de las características de la fuerza externa. También, que puede regresar a dicha posición de referencia, cuando termina la fuerza externa. Los cambios de posición del primer miembro 22 respecto del segundo miembro 23 son detectados por unos sensores 7 que comunican esta información a una interfaz 28. La interfaz 28 establece las características de la fuerza externa aplicada, esencialmente, su dirección y su sentido. Por ejemplo, mediante un procesamiento de las distancias interpoladas que recogen los sensores 7. De acuerdo con estas características, se genera una instrucción para accionar uno o más motores del vehículo esclavo 9 para dirigir su movimiento. La interfaz 28 se realiza preferentemente con componentes electrónicos y puede incluir un procesador o computador, un controlador, una memoria, un autómata programable (PLC) , etc. Adicionalmente, en una realización, el vehículo esclavo 9 dotado del sistema de guiado 20 permite que un equipo auxiliar esté debidamente controlado. Por ejemplo, un elemento elevador con sus movimientos de subida, bajada, apertura, extensión de uñas, desplazamiento lateral, etc. También puede incorporar otros equipos auxiliares logísticos igualmente conectados de acuerdo con las necesidades de cada empresa. Todo ello acoplado en el vehículo esclavo 9, sea comandado también a través de la interfaz 28. Las instrucciones recibidas por la interfaz 28 se comunican selectivamente, bien al vehículo esclavo 9, bien al equipo auxiliar. La ventaja de que todas las instrucciones pasen por la interfaz 28 es que se pueden gestionar conjuntamente. Esto permite una coordinación más completa. Por ejemplo, se puede aprovechar si el equipo auxiliar instala sus propios sensores para que esta información sea integrada con la información del movimiento del vehículo esclavo. Lo cual, puede en algunas circunstancias evitar colisiones o movimientos incompatibles. La FIG. 2A muestra varios elementos del sistema de guiado 20 según una realización particular. Se aprecia un disco anular 2 unido un cuerpo fijo 6, con un mecanismo autocentrante elástico basado en resortes 5 (análogamente, podría ser magnético) . El cuerpo fijo 6 alberga en un alojamiento al disco anular 2. Los resortes 5 pueden ser, por ejemplo, de material elastómero. Estos resortes 5, en situación de reposo, (sin fuerzas externas aplicadas) mantienen flotante y centrado interiormente al disco anular 2 respecto del cuerpo fijo 6 que hace de tapa que lo rodea. El disco anular 2 se descentra cuando es aplicada una fuerza, en cualquier dirección. Para la transmisión de la fuerza externa sobre el disco anular flotante 2 se incluye un bulón 14 introducido n un orificio 1 practicado en el disco anular 2. El bulón 14 encaja en el disco anular 2. El bulón 14 y el disco anular 2 se mueven solidariamente respecto a un alojamiento 16 con holgura que permite cierto margen o recorrido en diferentes direcciones. El disco anular 2 vuelve a la posición de reposo en el momento en que cesa la fuerza gracias al mencionado conjunto de resortes 5. La FIG. 2B muestra un despiece de la realización de la FIG. 2A. El funcionamiento del sistema de guiado emplea los desplazamientos individuales de cada resorte 5 medidos por un conjunto de sensores 7, para medir la dirección, sentido y además magnitud del vector que representa la fuerza externa. En total, se han empleado seis resortes 5 que conectan el cuerpo fijo 6 con el disco anular flotante 2. Se aprecia que el disco anular 2 dispone un orificio central 1 y lleva incorporado cuatro sensores 7 distribuidos en cuadrantes para medir el desplazamiento en cualquier dirección del disco anular flotante 2. Así, se obtiene la orientación de la fuerza ejercida externamente gracias a la medición de distancias para transmitir velocidades en la tracción e interpolación entre los cuatro sensores 7 para su orientación. En una realización, por ejemplo, estos sensores 7 pueden implementarse mediante detectores inductivos. Los sensores 7 están instalados dentro de la carcasa 3 que se ensambla al cuerpo fijo 6. La información captada por los sensores 7 se comunica a una interfaz (no mostrada en esta figura) que la convierte en instrucciones de movimiento para uno o más motores asociados (no mostrados) con las ruedas directrices y/o ruedas motrices. La instrucción puede incluir una parte con información para mover las ruedas motrices y otra parte con información para girar las ruedas directrices un ángulo según la dirección de esa fuerza. En una realización concreta, la interfaz puede además gestionar y procesar instrucciones para controlar uno o más motores del equipo auxiliar que monte el vehículo esclavo. La FIG. 3A y la FIG. 3B son un ejemplo de funcionamiento según una realización de un vehículo compuesto 19 por un vehículo maestro 13 y un vehículo esclavo 9 acoplados entre sí gracias al sistema de guiado 20. De forma clara, en esta realización se aprecia la modularidad y versatilidad lograda. De un lado, un mismo vehículo esclavo 9 puede diseñarse para acoplarse con diferentes equipos auxiliares con sus propios mecanismos y accionamientos para realizar tareas concretas. En este caso, el vehículo esclavo 9 se acopla con un elemento elevador 12 que sirve para tareas de carga y/o descarga de mercancías. Así se puede dotar de nuevas características dimensionales, de capacidad de carga, apacidad de elevación y manejo de volúmenes diferentes. Para ello, el vehículo esclavo 9 puede diseñarse con una plataforma acoplable con variedad de equipos auxiliares. De otro lado, el vehículo maestro 13 puede dirigir al vehículo esclavo 9 sin necesidad de mecanismos adicionales mediante el sistema de guiado 20. El sistema de guiado 20 puede ser controlado remotamente, ya sea automáticamente o de forma manual. Ejemplo de esto último es un mando de control remoto que manejado por un operario permite conducir el vehículo maestro 13. Las maniobras del vehículo maestro 13 son replicadas por el vehículo esclavo 9 conformando un vehículo compuesto 20 que se mueve de manera conjunta, como si fuera un vehículo único gracias al sistema de guiado 20. El funcionamiento del sistema de guiado 20 se aprecia en mayor detalle en la FIG. 3B, el vehículo compuesto 20 incorpora un vehículo maestro 13 que guía al vehículo esclavo 9 gracias, por una parte, al acoplamiento entre ambos y, por otra, mediante el acoplamiento del propio vehículo esclavo 9 con el equipo auxiliar, concretamente con el elemento elevador 12. Por ejemplo, cuando es aplicada una fuerza de tracción, ese disco anular flotante 2 es descentrado en la dirección del esfuerzo aplicado con una tensión controlada (p.e. aproximadamente 10 N) y un desplazamiento "D" de la concentricidad (p.e. hasta 15 mm) según un ángulo de orientación "O". Cuando el eje 1, que puede ser empujado por un bulón 14 existente en el vehículo maestro 13, se acopla a este sistema de guiado 20, o a un tirador 15, toda la fuerza ejercida es replicada al vehículo esclavo 9. En lugar de un bulón 14, puede existir otro componente de acoplamiento análogo entre el vehículo maestro 13 y el sistema de guiado 20. Este desplazamiento "D" de la concentricidad puede traducirse en un movimiento con un efecto multiplicador en el vehículo esclavo 9 que se pretende mover. Así una fuerza externa de guiado de 10 N puede servir para pilotar vehículos esclavos 9 de varias toneladas. Se replica la dirección de tracción y según se descentre más o menos el bulón 14. También, puede replicar la velocidad del vehículo maestro 13 o del tirador manual 15. La interpretación y replicación se realiza mediante la interfaz. Con referencia a las FIGs. 4A-4D se explica un ejemplo de realización de un vehículo compuesto 19 con la unión de vehículo maestro 13 más vehículo esclavo 9 gracias a a introducción del bulón 14 de acople en el vehículo maestro 13. El vehículo esclavo 9 monta en una plataforma el elemento de elevación 12. La FIG. 4A muestra una imagen del bulón 14 que sobresale de la base superior del vehículo maestro 13 que está destinado a acoplarse (p.e. engancharse) con el sistema de guiado del vehículo esclavo. Esto permite una amplia variedad de combinaciones de transformación en otros vehículos más complejos y específicos consiguiendo versatilidad y modularidad escalable. La FIG. 4B muestra una imagen del vehículo compuesto 20 resultante, donde el vehículo maestro 13 se encuentra ya acoplado el vehículo esclavo 19 (ubicado encima) mediante la conexión del bulón con el sistema de guiado 20 del vehículo esclavo 19. La FIG. 4C muestra una imagen de varios componentes del sistema de guiado 20. El acoplamiento se realiza a través del bulón 14 accionado por un vehículo maestro 13 o por un simple tirador manual. Un mecanismo autocentrante con resortes 5, ya descrito, permite recoger la información del empuje mediante unos sensores 7, así como la dirección (y sentido) por el vehículo maestro 13 o el tirador 15. Esta información es procesada por la parte electrónica de la interfaz (no mostrada) . En una realización, la información angular del vector asociada a la dirección de la fuerza externa sirve para gobernar el giro de las ruedas directrices 10 del vehículo esclavo 9 y la información del desplazamiento (mm de desplazamiento "D" respecto de la posición concéntrica del disco anular flotante respecto del cuerpo) del sistema de guiado 20 sirve para traccionar las ruedas motrices 11 consiguiendo así un efecto multiplicador. Esto es, una mínima carga ejercida por el vehículo maestro 13, o por el tirador manual 15 ordena un movimiento en el vehículo esclavo 9 y, si esa fuerza deja de actuar, el vehículo esclavo 9 también se detiene) . Así tanto fuerza, velocidad como dirección es dirigida por el vehículo maestro 13 o el tirador manual 15 y el vehículo esclavo 9 simplemente replica o copia el movimiento siguiendo esas acciones. Con la motorización del vehículo esclavo 9 se multiplica una fuerza externa aplicada. Gracias al sistema de guiado 20 se logra controlar esta fuerza multiplicada de un modo preciso y a la vez sencillo. El vehículo maestro 13 puede ser un AMR muy básico con elementos motores de mínima fuerza al que se acopla con el bulón 14. También puede ser manejado por un operario mediante un simple tirador manual 15 con su propio bulón. En ambos casos, e permite dirigir manualmente vehículos industriales de alto tonelaje y complejidad por un efecto copiador y multiplicador. Dirigirlo manualmente es intuitivo y los operadores logran el dominar su uso con precisión y sin apenas necesidad de aprendizaje. La FIG. 4D muestra un corte del vehículo compuesto 19, donde se aprecia mejor la unión de las diferentes partes. En concreto, el bulón 14 se encarga de unir mecánicamente el sistema de guiado 20 con el vehículo maestro 13. Para ello, existe un actuador lineal en el vehículo maestro 13 que eleva el bulón 14 para acoplarse en la unidad de guiado montada en el vehículo esclavo 9. Unos motores 29 ubicados en la parte trasera del vehículo esclavo 9 se encargan del accionar las ruedas motrices. Análogamente, otros motores 29 ubicados en la parte delantera del vehículo esclavo 9 se encargan del accionar las ruedas directrices. La FIG. 5A muestra una realización del vehículo esclavo 9 con el sistema de guiado 20 visto desde abajo. El vehículo esclavo 9 monta un elemento elevador 12. Se aprecian también los motores 29 asociados al movimiento directriz de las ruedas delanteras 10, y motriz de las traseras 11. La FIG. 5B muestra una realización donde el elemento de guiado es un tirador manual 15 acoplada con este sistema de guiado 20 permite empujar o tirar de diversa maquinaria, es decir, de vehículos esclavos 9. Con esta opción, son dirigidos de modo manual, actuando sobre su/s motor/es a través de la interfaz, aunque pesen varias toneladas. Simplemente, en el caso de motor motriz y motor directriz, por un lado, se detecta y se copia la dirección de empuje. Por otro, se detecta la fuerza externa ejercida para producir, una equivalente que actúa sobre el vehículo esclavo. Así, se pueden dirigir, sin apenas esfuerzo, para operaciones determinadas o simplemente para cambiarlas de ubicación. Cuando el vehículo esclavo 9 es conducido manualmente con el tirador 15, se prevé en algunas realizaciones que disponga de capacidad de control. Para ello, el tirador 15 está también comunicado, a través de la interfaz 28, con las partes a controlar del equipo auxiliar del vehículo esclavo 9. Por ejemplo, el tirador 15 puede disponer de sencillos botones 17 con pulsado progresivo (a más recorrido, más velocidad, por ejemplo, definiendo dos o más niveles de velocidad) . Con los botones 17 se puede actuar, pasando por la interfaz 28, sobre este equipo auxiliar (por ejemplo, un dispositivo elevador para subir o bajar mercancía) . Puede ser adecuado establecer algunas comprobaciones por seguridad. Primero, que el bulón para el tirador esté orrectamente acoplado con el vehículo esclavo 9 a través de la interfaz del sistema de guiado (adicionalmente puede dotarlo de energía) . Segundo, que el sistema de guiado 20 esté en una posición concéntrica de referencia (indicativa de ausencia de fuerza externa) para impedir actuar sobre el equipo auxiliar cuando exista desplazamiento. Un caso práctico en la Industria donde se aprecian varias bondades de la presente propuesta es el acoplamiento entre un AMR eléctrico, como vehículo maestro, y un vehículo esclavo también eléctrico. Como se ha indicado, aunque un AMR básico tenga una capacidad tractora y de carga mínima, puede gobernar estaciones de elevación u otros vehículos esclavos similares como cualesquiera plataformas de transporte mucho más pesadas con su propia motorización y dirección que será guiada por este AMR básico. Esto permite integrar, escalar y multiplicar funcionalidades. Hay un acoplamiento de sensores que implica que toda la sensórica de ambos se pueda compartir a través de la interfaz del sistema de guiado. Por ejemplo, tanto los sensores de navegación como los de posicionamiento (Bluetooth, ultrasonidos, láser, NFC, etc.) como los sensores de recogida datos (peso, temperatura, humedad, etc.) . Adicionalmente, también, a través de la interfaz, se puede gestionar la correcta conexión y el suministro de fuentes de energía eléctrica (baterías) de manera balanceada. Por ejemplo, las plataformas esclavas (mucho más pesadas) pueden estar permanentemente recargando las baterías del vehículo maestro (AMR) , pero también a la inversa. La interfaz puede monitorizar el nivel de carga de cada batería, y dar instrucción en consecuencia. Se permite recargar una batería eléctrica de carga menor con la otra batería de carga mayor, si la carga mayor supera un umbral que permita trasvasar parte de la carga sobrante. Si bien la invención se ha descrito, sin carácter limitativo, a través de varias realizaciones específicas. Se debe entender que es posible realizar diversos cambios para adaptarse a circunstancias concretas dentro del alcance definido por las reivindicaciones adjuntas.
Publicaciones:
ES2953908 (17/11/2023) - A1 Solicitud de patente con informe sobre el estado de la técnica
Eventos:
En fecha 07/04/2022 se realizó Registro Instancia de Solicitud
En fecha 11/04/2022 se realizó Admisión a Trámite
En fecha 11/04/2022 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 28/04/2022 se realizó Defectos en solicitud de reducción de tasas
En fecha 28/04/2022 se realizó 6100X_Notificación defectos en solicitud de reducción de tasas
En fecha 05/05/2022 se realizó Publicación defectos en solicitud de reducción de tasas
En fecha 31/05/2022 se realizó 3007_Registro subsanación de defectos en reducción de tasas
En fecha 31/05/2022 se realizó Concesión solicitud de reducción de tasas
En fecha 03/06/2022 se realizó Superado examen de oficio
En fecha 06/06/2022 se realizó Publicación concesión reducción de tasas
En fecha 30/06/2022 se realizó Realizado IET
En fecha 01/07/2022 se realizó 1109P_Comunicación Traslado del IET
En fecha 06/11/2023 se realizó PETEX_Petición de examen sustantivo
En fecha 17/11/2023 se realizó Publicación Solicitud
En fecha 17/11/2023 se realizó Publicación Folleto Solicitud con IET (A1)
En fecha 04/03/2024 se realizó Validación petición y/o pago de examen sustantivo conforme
Pagos:
07/04/2022 - Pago Tasas IET
+ ES-2953908_A11. Sistema de guiado de un vehículo esclavo (9) de carga que comprende: un elemento de guiado (21) configurado para aplicar una fuerza externa; un primer miembro (22) configurado para recibir el elemento de guiado (21) ; un segundo miembro (23) que comprende un alojamiento (16) con capacidad para recibir el primer miembro (22) ; un mecanismo autocentrante configurado para mantener, en ausencia de la fuerza externa, al primer miembro (22) en una posición de referencia dentro del alojamiento (16) del segundo miembro (23) ; una pluralidad de sensores (7) , donde cada sensor (7) está configurado para medir un cambio de posición del primer miembro (22) respecto del segundo miembro (23) ; una interfaz (28) configurada para recibir cada cambio de posición medido por un sensor (7) y determinar una dirección y un sentido para la fuerza externa aplicada y generar una instrucción de acuerdo con dicha dirección y dicho sentido, donde la instrucción es para accionar al menos un motor (29) asociado al vehículo esclavo (9) . 2. Sistema de guiado según la reivindicación 1, donde el mecanismo autocentrante comprende una pluralidad de elementos elásticos (5) distribuidos en una pluralidad de localizaciones del alojamiento (16) , donde los elementos elásticos (5) conectan el primer miembro (22) con el segundo miembro (23) , de manera que el primer miembro (22) es movible dentro del alojamiento (16) a causa de la fuerza externa, y en ausencia de dicha fuerza externa queda en una posición fija de referencia. 3. Sistema de guiado según la reivindicación 1, donde el mecanismo autocentrante comprende una pluralidad de elementos magnéticos distribuidos para sustentar, mediante repulsión magnética, el primer miembro (22) en el alojamiento (16) del segundo miembro (23) , de manera que el primer miembro (22) es movible dentro del alojamiento (16) a causa de la fuerza externa, y en ausencia de dicha fuerza externa queda en una posición fija de referencia. 4. Sistema de guiado según una cualquiera de las reivindicaciones 1 a 3, donde la interfaz (28) está configurada para procesar el cambio de posición del primer miembro (22) respecto del segundo miembro (23) y asignar una magnitud a la fuerza externa aplicada según el cambio de posición. 5. Sistema de guiado según la reivindicación 4, donde la interfaz (28) está configurada para generar un primer tipo de instrucción para un primer motor asociado a un movimiento motriz del vehículo esclavo (9) , y un segundo tipo de una instrucción para un segundo motor asociado un movimiento directriz del vehículo esclavo (9) . 6. Sistema de guiado según la reivindicación 5, donde la interfaz (28) está configurada para identificar la presencia de un equipo auxiliar montado por el vehículo esclavo (9) con un tercer motor asociado al equipo auxiliar, y donde la interfaz (28) además está configurada para generar un tercer tipo de instrucción para controlar el tercer motor. 7. Sistema de guiado según una cualquiera de las reivindicaciones 1 a 6, donde el elemento de guiado (21) está configurado para unirse con el vehículo esclavo (9) ; donde el primer miembro (22) comprende un disco anular (2) ; donde el segundo miembro (23) comprende una tapa anular (6) y una carcasa (3) , donde el disco anular (2) es flotante dentro de la carcasa (3) mediante los elementos elásticos (5) , donde los elementos elásticos (5) que están distribuidos y conectan la parte exterior del disco anular (2) con la parte interior de la carcasa (3) . 8. Sistema de guiado según una cualquiera de las reivindicaciones 1 a 7, donde el elemento de guiado (21) es conectable con un bulón (14) de un vehículo maestro (13) , donde el vehículo maestro (13) está configurado para moverse y aplicar una fuerza externa sobre el elemento de guiado (21) . 9. Sistema de guiado según la reivindicación 8, donde, si el vehículo esclavo (9) y el vehículo maestro (13) se alimentan cada uno con una batería eléctrica, la interfaz (28) está configurada para monitorizar el nivel de carga de cada batería, y para generar una instrucción para recargar la batería eléctrica de carga menor con la batería de carga mayor, si la carga mayor supera un umbral. 10. Sistema de guiado según una cualquiera de las reivindicaciones 1 a 8, donde el elemento de guiado (21) es conectable a un tirador (15) para aplicar manualmente una fuerza externa. 11. Sistema de guiado según las reivindicaciones 5 y 10, donde el tirador (15) comprende uno o más botones (17) para ser accionados por un usuario, donde, en ausencia de fuerza externa aplicada al mecanismo autocentrante, se genera un tercer tipo de instrucción en la interfaz (28) para actuar sobre el tercer motor asociado al equipo auxiliar. 12. Vehículo esclavo (9) de carga que comprende el sistema de guiado según una cualquiera de las reivindicaciones 1 a 11.
Los productos y servicios protegidos por este registro son:
B25J 17/00 - B25J 3/00 - B62D 53/00 - B60D 99/00
Descripciones:
+ ES-2953908_A1 Sistema de guiado de un vehículo esclavo de carga y vehículo esclavo de carga que lo comprende Campo técnico de la invención La invención pertenece a los asistentes de guiado adaptados para dirigir un vehículo y controlar su movimiento. La invención se refiere a un sistema para guiar un vehículo, preferentemente industrial. Concretamente, para guiar un vehículo motorizado de carga mediante un mecanismo que, acoplado en el vehículo, traduce un movimiento relativo de una pieza alrededor de otra pieza en un movimiento del vehículo. Así permite fijar dirección y velocidad con las que debe moverse el vehículo. La fuerza que sirve para guiar el vehículo de carga puede ser aplicada de forma manual o por otro vehículo maestro. Estado de la Técnica Los mecanismos conocidos para dirigir un vehículo tienen algunas limitaciones y problemas. Por ejemplo, para diferentes tipos de carga las empresas deben contar con diferentes tipos de vehículos que condicionan mucho la versatilidad y escalabilidad. Es habitual que estos vehículos sean de tipo esclavo, es decir, vehículos diseñados para ser dirigidos o guiados externamente, bien mediante un dispositivo electrónico de control remoto, bien manualmente mediante un mando mecánico o electro-mecánico. Se observa que tales mecanismos son generalmente complejos y específicos de cada fabricante e incompatibles entre sí. Se advierte que ello repercute en una escasa capacidad en la actualización y adaptación de los vehículos industriales. Un caso particular, donde el problema anterior se acentúa, es con vehículos robotizados de carga, por ejemplo, de tipo AMR (Automated Mobile Robot) . Una planta industrial que use un AMR concreto, está condicionada a trabajar con dispositivos del mismo fabricante y en las condiciones configuradas inicialmente de carga y/o elevación. Para cargas especiales, los AMR de mercado son caros ya que precisan ser fabricados específicamente. Por ejemplo, cargas que son de gran peso, de longitud superior a pallet o que deban elevarse a diferentes alturas. Además, cualquier redimensión de las cargas con las que trabaja el AMR y para las que está diseñado, supone a menudo la necesidad de cambiar completamente el vehículo. Breve descripción de la invención Sería deseable un sistema que resuelva o al menos mitigue las limitaciones y problemas observados en el estado de la técnica. La presente invención propone en su forma más general un sistema de guiado de un vehículo esclavo motorizado de carga, o simplemente vehículo esclavo, según la reivindicación independiente. Realizaciones particulares se definen en las reivindicaciones dependientes. También es objeto de la invención un vehículo esclavo que comprende el sistema de guiado y que se combina con un diseño modular capaz de montar diversos equipos auxiliares para operar en el entorno industrial. Se mejora la versatilidad gracias a la capacidad de transformar de manera sencilla, según un esquema estandarizable de acoplamiento, un vehículo esclavo según las necesidades de cada empresa. El vehículo esclavo con el sistema de guiado puede ser conducido mediante un vehículo maestro o con un elemento de guiado manual que denominamos tirador. Breve descripción de las figuras FIG. 1 es un diagrama simplificado de bloques del sistema de guiado. FIG. 2A es un ejemplo de realización del sistema de guiado visto desde abajo. FIG. 2B es un ejemplo de realización del sistema de guiado según un despiece. FIG. 3A es un ejemplo de realización de un vehículo compuesto por un maestro más un esclavo acoplados ambos mediante el sistema de guiado con un accesorio elevador. FIG. 3B es un ejemplo de funcionamiento del sistema de guiado en un vehículo compuesto con un accesorio elevador. FIG. 4A es un ejemplo de realización de un vehículo compuesto con un bulón acoplado con el sistema de guiado ubicado en su parte superior. FIG. 4B es un ejemplo de realización de un vehículo compuesto con una plataforma que monta un accesorio elevador y que es conducido gracias al sistema de guiado. FIG. 4C es una ampliación de la unión del sistema de guiado entre el vehículo esclavo y el vehículo maestro del ejemplo de realización de la FIG. 4B. FIG. 4D es un corte del ejemplo de realización de la FIG. 4B. FIG. 5A es un ejemplo de realización, visto desde abajo, del sistema de guiado de una plataforma con sistema de elevación en un vehículo esclavo. FIG. 5B es un ejemplo de realización del sistema de guiado de una plataforma con sistema de elevación controlado manualmente por un tirador. LISTADO DE REFERENCIAS NUMÉRICAS 1 Orificio para bulón. 2 Disco anular. 3 Carcasa. 4 Agujeros para fijación. 5 Resorte. 6 Cuerpo fijo. 7 Sensores. 8 Arandela de fricción. 9 Vehículo esclavo. 10 Ruedas directrices del vehículo esclavo. 11 Ruedas motrices del vehículo esclavo. 12 Elemento elevador (equipo auxiliar del vehículo esclavo) . 13 Vehículo maestro. 14 Bulón del vehículo maestro. 15 Tirador. 16 Alojamiento (con holgura de recorrido) . 17 Botones del tirador. 19 Vehículo compuesto. 20 Sistema de guiado. 21 Elemento de guiado. 22 Primer miembro. 23 Segundo miembro. 25 Elemento elástico. 28 Interfaz. 29 Motor Descripción detallada de la invención Con referencia a las figuras anteriores, se describen, con fines ilustrativos sin carácter limitante, varios ejemplos de realización y diversos aspectos de la invención. La FIG. 1 representa esquemáticamente mediante bloques un sistema de guiado 20 de un vehículo esclavo 9. A través de un elemento de guiado 21, por ejemplo, un bulón o un perno o algún otro mecanismo similar, se puede aplicar una fuerza externa sobre el propio sistema 20. Puede hacerse de forma manual por un usuario, generalmente un operario industrial. También puede hacerse a través de un vehículo maestro 13 acoplado con sistema 20 (y por tanto con el vehículo esclavo 9) . Ambas posibilidades están contempladas. El sistema de guiado 20 incluye dos miembros que cooperan entre sí. Un primer miembro 22 está formado por una pieza adaptada para recibir el elemento de guiado 21, por ejemplo, uniéndose mecánicamente a él. El sistema 20 incluye un segundo iembro 23 que está formado por una pieza con un alojamiento practicado en su interior. Dicho alojamiento está destinado a contener, al menos parcialmente, el primer miembro 22 (véanse realizaciones del alojamiento en figuras posteriores bajo referencia numérica 16) . De esta forma, las dimensiones del alojamiento deben asegurar cierto margen para el desplazamiento interno del primer miembro 22 en varias direcciones en un plano. Tales direcciones son las que debe replicar en su movimiento el vehículo esclavo 9. Para ello, la dirección en la que se mueve el primer miembro 22 debe ser traducida a una instrucción para controlar uno o más motores 29 del vehículo esclavo 9 reproduciendo un movimiento como el que se desea realizar mediante la aplicación de la fuerza externa. Una interfaz 28 realiza la traducción. Como se ha indicado, el primer miembro 22 debe ser movible respecto del segundo miembro 23, que lo alberga al menos en parte. También, debe ser capaz de volver a una posición original de referencia en ausencia de fuerza externa. A tal efecto, se necesita un mecanismo autocentrante, instalado entre ambos miembros. Este mecanismo autocentrante contrarresta un desplazamiento relativo entre miembros causado por una fuerza externa, de forma que, al cesar ésta, regrese a su posición de referencia. Hay varias formas de realizar este mecanismo centrador. Por ejemplo, están previstos una serie de elementos autocentrantes distribuidos por el alojamiento. De manera que, si finaliza la fuerza externa, el primer miembro 22 recupera su posición de referencia en el alojamiento. Una opción para los elementos autocentrantes es emplear elementos elásticos (véanse figuras posteriores bajo referencia numérica 5) que sujetan elásticamente el primer miembro 22 al segundo miembro 23. Otra opción equivalente es a través de elementos magnéticos (imanes permanentes o dispositivos electro-magnéticos) que sustentan el primer miembro 22 dentro del segundo miembro 23. Un elemento autocentrante magnético tiene un polo en el primer miembro 22 enfrentado (en línea) a otro polo en el segundo miembro 23, ambos polos proximales con igual polaridad (N-N o S-S) para que se repelan. Se distribuyen de forma que unos elementos magnéticos compensen a otros. Resultando así, que el primer miembro 22 flota o levita dentro del alojamiento del segundo miembro 23. Lo principal de ambas opciones es que permiten identificar la presencia de una fuerza externa, puesto que el primer miembro 22 cambia de posición, de una posición de eferencia a una posición indicativa de las características de la fuerza externa. También, que puede regresar a dicha posición de referencia, cuando termina la fuerza externa. Los cambios de posición del primer miembro 22 respecto del segundo miembro 23 son detectados por unos sensores 7 que comunican esta información a una interfaz 28. La interfaz 28 establece las características de la fuerza externa aplicada, esencialmente, su dirección y su sentido. Por ejemplo, mediante un procesamiento de las distancias interpoladas que recogen los sensores 7. De acuerdo con estas características, se genera una instrucción para accionar uno o más motores del vehículo esclavo 9 para dirigir su movimiento. La interfaz 28 se realiza preferentemente con componentes electrónicos y puede incluir un procesador o computador, un controlador, una memoria, un autómata programable (PLC) , etc. Adicionalmente, en una realización, el vehículo esclavo 9 dotado del sistema de guiado 20 permite que un equipo auxiliar esté debidamente controlado. Por ejemplo, un elemento elevador con sus movimientos de subida, bajada, apertura, extensión de uñas, desplazamiento lateral, etc. También puede incorporar otros equipos auxiliares logísticos igualmente conectados de acuerdo con las necesidades de cada empresa. Todo ello acoplado en el vehículo esclavo 9, sea comandado también a través de la interfaz 28. Las instrucciones recibidas por la interfaz 28 se comunican selectivamente, bien al vehículo esclavo 9, bien al equipo auxiliar. La ventaja de que todas las instrucciones pasen por la interfaz 28 es que se pueden gestionar conjuntamente. Esto permite una coordinación más completa. Por ejemplo, se puede aprovechar si el equipo auxiliar instala sus propios sensores para que esta información sea integrada con la información del movimiento del vehículo esclavo. Lo cual, puede en algunas circunstancias evitar colisiones o movimientos incompatibles. La FIG. 2A muestra varios elementos del sistema de guiado 20 según una realización particular. Se aprecia un disco anular 2 unido un cuerpo fijo 6, con un mecanismo autocentrante elástico basado en resortes 5 (análogamente, podría ser magnético) . El cuerpo fijo 6 alberga en un alojamiento al disco anular 2. Los resortes 5 pueden ser, por ejemplo, de material elastómero. Estos resortes 5, en situación de reposo, (sin fuerzas externas aplicadas) mantienen flotante y centrado interiormente al disco anular 2 respecto del cuerpo fijo 6 que hace de tapa que lo rodea. El disco anular 2 se descentra cuando es aplicada una fuerza, en cualquier dirección. Para la transmisión de la fuerza externa sobre el disco anular flotante 2 se incluye un bulón 14 introducido n un orificio 1 practicado en el disco anular 2. El bulón 14 encaja en el disco anular 2. El bulón 14 y el disco anular 2 se mueven solidariamente respecto a un alojamiento 16 con holgura que permite cierto margen o recorrido en diferentes direcciones. El disco anular 2 vuelve a la posición de reposo en el momento en que cesa la fuerza gracias al mencionado conjunto de resortes 5. La FIG. 2B muestra un despiece de la realización de la FIG. 2A. El funcionamiento del sistema de guiado emplea los desplazamientos individuales de cada resorte 5 medidos por un conjunto de sensores 7, para medir la dirección, sentido y además magnitud del vector que representa la fuerza externa. En total, se han empleado seis resortes 5 que conectan el cuerpo fijo 6 con el disco anular flotante 2. Se aprecia que el disco anular 2 dispone un orificio central 1 y lleva incorporado cuatro sensores 7 distribuidos en cuadrantes para medir el desplazamiento en cualquier dirección del disco anular flotante 2. Así, se obtiene la orientación de la fuerza ejercida externamente gracias a la medición de distancias para transmitir velocidades en la tracción e interpolación entre los cuatro sensores 7 para su orientación. En una realización, por ejemplo, estos sensores 7 pueden implementarse mediante detectores inductivos. Los sensores 7 están instalados dentro de la carcasa 3 que se ensambla al cuerpo fijo 6. La información captada por los sensores 7 se comunica a una interfaz (no mostrada en esta figura) que la convierte en instrucciones de movimiento para uno o más motores asociados (no mostrados) con las ruedas directrices y/o ruedas motrices. La instrucción puede incluir una parte con información para mover las ruedas motrices y otra parte con información para girar las ruedas directrices un ángulo según la dirección de esa fuerza. En una realización concreta, la interfaz puede además gestionar y procesar instrucciones para controlar uno o más motores del equipo auxiliar que monte el vehículo esclavo. La FIG. 3A y la FIG. 3B son un ejemplo de funcionamiento según una realización de un vehículo compuesto 19 por un vehículo maestro 13 y un vehículo esclavo 9 acoplados entre sí gracias al sistema de guiado 20. De forma clara, en esta realización se aprecia la modularidad y versatilidad lograda. De un lado, un mismo vehículo esclavo 9 puede diseñarse para acoplarse con diferentes equipos auxiliares con sus propios mecanismos y accionamientos para realizar tareas concretas. En este caso, el vehículo esclavo 9 se acopla con un elemento elevador 12 que sirve para tareas de carga y/o descarga de mercancías. Así se puede dotar de nuevas características dimensionales, de capacidad de carga, apacidad de elevación y manejo de volúmenes diferentes. Para ello, el vehículo esclavo 9 puede diseñarse con una plataforma acoplable con variedad de equipos auxiliares. De otro lado, el vehículo maestro 13 puede dirigir al vehículo esclavo 9 sin necesidad de mecanismos adicionales mediante el sistema de guiado 20. El sistema de guiado 20 puede ser controlado remotamente, ya sea automáticamente o de forma manual. Ejemplo de esto último es un mando de control remoto que manejado por un operario permite conducir el vehículo maestro 13. Las maniobras del vehículo maestro 13 son replicadas por el vehículo esclavo 9 conformando un vehículo compuesto 20 que se mueve de manera conjunta, como si fuera un vehículo único gracias al sistema de guiado 20. El funcionamiento del sistema de guiado 20 se aprecia en mayor detalle en la FIG. 3B, el vehículo compuesto 20 incorpora un vehículo maestro 13 que guía al vehículo esclavo 9 gracias, por una parte, al acoplamiento entre ambos y, por otra, mediante el acoplamiento del propio vehículo esclavo 9 con el equipo auxiliar, concretamente con el elemento elevador 12. Por ejemplo, cuando es aplicada una fuerza de tracción, ese disco anular flotante 2 es descentrado en la dirección del esfuerzo aplicado con una tensión controlada (p.e. aproximadamente 10 N) y un desplazamiento "D" de la concentricidad (p.e. hasta 15 mm) según un ángulo de orientación "O". Cuando el eje 1, que puede ser empujado por un bulón 14 existente en el vehículo maestro 13, se acopla a este sistema de guiado 20, o a un tirador 15, toda la fuerza ejercida es replicada al vehículo esclavo 9. En lugar de un bulón 14, puede existir otro componente de acoplamiento análogo entre el vehículo maestro 13 y el sistema de guiado 20. Este desplazamiento "D" de la concentricidad puede traducirse en un movimiento con un efecto multiplicador en el vehículo esclavo 9 que se pretende mover. Así una fuerza externa de guiado de 10 N puede servir para pilotar vehículos esclavos 9 de varias toneladas. Se replica la dirección de tracción y según se descentre más o menos el bulón 14. También, puede replicar la velocidad del vehículo maestro 13 o del tirador manual 15. La interpretación y replicación se realiza mediante la interfaz. Con referencia a las FIGs. 4A-4D se explica un ejemplo de realización de un vehículo compuesto 19 con la unión de vehículo maestro 13 más vehículo esclavo 9 gracias a a introducción del bulón 14 de acople en el vehículo maestro 13. El vehículo esclavo 9 monta en una plataforma el elemento de elevación 12. La FIG. 4A muestra una imagen del bulón 14 que sobresale de la base superior del vehículo maestro 13 que está destinado a acoplarse (p.e. engancharse) con el sistema de guiado del vehículo esclavo. Esto permite una amplia variedad de combinaciones de transformación en otros vehículos más complejos y específicos consiguiendo versatilidad y modularidad escalable. La FIG. 4B muestra una imagen del vehículo compuesto 20 resultante, donde el vehículo maestro 13 se encuentra ya acoplado el vehículo esclavo 19 (ubicado encima) mediante la conexión del bulón con el sistema de guiado 20 del vehículo esclavo 19. La FIG. 4C muestra una imagen de varios componentes del sistema de guiado 20. El acoplamiento se realiza a través del bulón 14 accionado por un vehículo maestro 13 o por un simple tirador manual. Un mecanismo autocentrante con resortes 5, ya descrito, permite recoger la información del empuje mediante unos sensores 7, así como la dirección (y sentido) por el vehículo maestro 13 o el tirador 15. Esta información es procesada por la parte electrónica de la interfaz (no mostrada) . En una realización, la información angular del vector asociada a la dirección de la fuerza externa sirve para gobernar el giro de las ruedas directrices 10 del vehículo esclavo 9 y la información del desplazamiento (mm de desplazamiento "D" respecto de la posición concéntrica del disco anular flotante respecto del cuerpo) del sistema de guiado 20 sirve para traccionar las ruedas motrices 11 consiguiendo así un efecto multiplicador. Esto es, una mínima carga ejercida por el vehículo maestro 13, o por el tirador manual 15 ordena un movimiento en el vehículo esclavo 9 y, si esa fuerza deja de actuar, el vehículo esclavo 9 también se detiene) . Así tanto fuerza, velocidad como dirección es dirigida por el vehículo maestro 13 o el tirador manual 15 y el vehículo esclavo 9 simplemente replica o copia el movimiento siguiendo esas acciones. Con la motorización del vehículo esclavo 9 se multiplica una fuerza externa aplicada. Gracias al sistema de guiado 20 se logra controlar esta fuerza multiplicada de un modo preciso y a la vez sencillo. El vehículo maestro 13 puede ser un AMR muy básico con elementos motores de mínima fuerza al que se acopla con el bulón 14. También puede ser manejado por un operario mediante un simple tirador manual 15 con su propio bulón. En ambos casos, e permite dirigir manualmente vehículos industriales de alto tonelaje y complejidad por un efecto copiador y multiplicador. Dirigirlo manualmente es intuitivo y los operadores logran el dominar su uso con precisión y sin apenas necesidad de aprendizaje. La FIG. 4D muestra un corte del vehículo compuesto 19, donde se aprecia mejor la unión de las diferentes partes. En concreto, el bulón 14 se encarga de unir mecánicamente el sistema de guiado 20 con el vehículo maestro 13. Para ello, existe un actuador lineal en el vehículo maestro 13 que eleva el bulón 14 para acoplarse en la unidad de guiado montada en el vehículo esclavo 9. Unos motores 29 ubicados en la parte trasera del vehículo esclavo 9 se encargan del accionar las ruedas motrices. Análogamente, otros motores 29 ubicados en la parte delantera del vehículo esclavo 9 se encargan del accionar las ruedas directrices. La FIG. 5A muestra una realización del vehículo esclavo 9 con el sistema de guiado 20 visto desde abajo. El vehículo esclavo 9 monta un elemento elevador 12. Se aprecian también los motores 29 asociados al movimiento directriz de las ruedas delanteras 10, y motriz de las traseras 11. La FIG. 5B muestra una realización donde el elemento de guiado es un tirador manual 15 acoplada con este sistema de guiado 20 permite empujar o tirar de diversa maquinaria, es decir, de vehículos esclavos 9. Con esta opción, son dirigidos de modo manual, actuando sobre su/s motor/es a través de la interfaz, aunque pesen varias toneladas. Simplemente, en el caso de motor motriz y motor directriz, por un lado, se detecta y se copia la dirección de empuje. Por otro, se detecta la fuerza externa ejercida para producir, una equivalente que actúa sobre el vehículo esclavo. Así, se pueden dirigir, sin apenas esfuerzo, para operaciones determinadas o simplemente para cambiarlas de ubicación. Cuando el vehículo esclavo 9 es conducido manualmente con el tirador 15, se prevé en algunas realizaciones que disponga de capacidad de control. Para ello, el tirador 15 está también comunicado, a través de la interfaz 28, con las partes a controlar del equipo auxiliar del vehículo esclavo 9. Por ejemplo, el tirador 15 puede disponer de sencillos botones 17 con pulsado progresivo (a más recorrido, más velocidad, por ejemplo, definiendo dos o más niveles de velocidad) . Con los botones 17 se puede actuar, pasando por la interfaz 28, sobre este equipo auxiliar (por ejemplo, un dispositivo elevador para subir o bajar mercancía) . Puede ser adecuado establecer algunas comprobaciones por seguridad. Primero, que el bulón para el tirador esté orrectamente acoplado con el vehículo esclavo 9 a través de la interfaz del sistema de guiado (adicionalmente puede dotarlo de energía) . Segundo, que el sistema de guiado 20 esté en una posición concéntrica de referencia (indicativa de ausencia de fuerza externa) para impedir actuar sobre el equipo auxiliar cuando exista desplazamiento. Un caso práctico en la Industria donde se aprecian varias bondades de la presente propuesta es el acoplamiento entre un AMR eléctrico, como vehículo maestro, y un vehículo esclavo también eléctrico. Como se ha indicado, aunque un AMR básico tenga una capacidad tractora y de carga mínima, puede gobernar estaciones de elevación u otros vehículos esclavos similares como cualesquiera plataformas de transporte mucho más pesadas con su propia motorización y dirección que será guiada por este AMR básico. Esto permite integrar, escalar y multiplicar funcionalidades. Hay un acoplamiento de sensores que implica que toda la sensórica de ambos se pueda compartir a través de la interfaz del sistema de guiado. Por ejemplo, tanto los sensores de navegación como los de posicionamiento (Bluetooth, ultrasonidos, láser, NFC, etc.) como los sensores de recogida datos (peso, temperatura, humedad, etc.) . Adicionalmente, también, a través de la interfaz, se puede gestionar la correcta conexión y el suministro de fuentes de energía eléctrica (baterías) de manera balanceada. Por ejemplo, las plataformas esclavas (mucho más pesadas) pueden estar permanentemente recargando las baterías del vehículo maestro (AMR) , pero también a la inversa. La interfaz puede monitorizar el nivel de carga de cada batería, y dar instrucción en consecuencia. Se permite recargar una batería eléctrica de carga menor con la otra batería de carga mayor, si la carga mayor supera un umbral que permita trasvasar parte de la carga sobrante. Si bien la invención se ha descrito, sin carácter limitativo, a través de varias realizaciones específicas. Se debe entender que es posible realizar diversos cambios para adaptarse a circunstancias concretas dentro del alcance definido por las reivindicaciones adjuntas.
Publicaciones:
ES2953908 (17/11/2023) - A1 Solicitud de patente con informe sobre el estado de la técnica
Eventos:
En fecha 07/04/2022 se realizó Registro Instancia de Solicitud
En fecha 11/04/2022 se realizó Admisión a Trámite
En fecha 11/04/2022 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 28/04/2022 se realizó Defectos en solicitud de reducción de tasas
En fecha 28/04/2022 se realizó 6100X_Notificación defectos en solicitud de reducción de tasas
En fecha 05/05/2022 se realizó Publicación defectos en solicitud de reducción de tasas
En fecha 31/05/2022 se realizó 3007_Registro subsanación de defectos en reducción de tasas
En fecha 31/05/2022 se realizó Concesión solicitud de reducción de tasas
En fecha 03/06/2022 se realizó Superado examen de oficio
En fecha 06/06/2022 se realizó Publicación concesión reducción de tasas
En fecha 30/06/2022 se realizó Realizado IET
En fecha 01/07/2022 se realizó 1109P_Comunicación Traslado del IET
En fecha 06/11/2023 se realizó PETEX_Petición de examen sustantivo
En fecha 17/11/2023 se realizó Publicación Solicitud
En fecha 17/11/2023 se realizó Publicación Folleto Solicitud con IET (A1)
En fecha 04/03/2024 se realizó Validación petición y/o pago de examen sustantivo conforme
Pagos:
07/04/2022 - Pago Tasas IET
Fuente de la información
Parte de la información aquí publicada es pública puesto que ha sido obtenida de la Oficina de Propiedad Industrial de los diferentes países el 27/04/2024 y por lo tanto puede ser que la información no esté actualizada.Parte de la información aquí mostrada ha sido calculada por nuestro sistema informático y puede no ser veraz.
Privacidad
Si considera que al información aquí publicada afecta a su privacidad y desea que eliminemos la información aquí publicada envíe un email a info@patentes-y-marcas.com o rellene el formulario que encontrará aquí.Información sobre el registro de patente nacional por SISTEMA DE GUIADO DE UN VEHÍCULO ESCLAVO DE CARGA Y VEHÍCULO ESCLAVO DE CARGA QUE LO COMPRENDE con el número P202230315
El registro de patente nacional por SISTEMA DE GUIADO DE UN VEHÍCULO ESCLAVO DE CARGA Y VEHÍCULO ESCLAVO DE CARGA QUE LO COMPRENDE con el número P202230315 fue solicitada el 07/04/2022. Se trata de un registro en España por lo que este registro no ofrece protección en el resto de países. El registro SISTEMA DE GUIADO DE UN VEHÍCULO ESCLAVO DE CARGA Y VEHÍCULO ESCLAVO DE CARGA QUE LO COMPRENDE con el número P202230315 fue solicitada por AR-VR MEIFUS ENGINEERING S.L. mediante los servicios del agente Isabel Carvajal y Urquijo. El registro [modality] por SISTEMA DE GUIADO DE UN VEHÍCULO ESCLAVO DE CARGA Y VEHÍCULO ESCLAVO DE CARGA QUE LO COMPRENDE con el número P202230315 está clasificado como B25J 17/00,B25J 3/00,B62D 53/00,B60D 99/00 según la clasificación internacional de patentes.
Otras invenciones solicitadas por AR-VR MEIFUS ENGINEERING S.L.
Es posible conocer todas las invenciones solicitadas por AR-VR MEIFUS ENGINEERING S.L. entre las que se encuentra el registro de patente nacional por SISTEMA DE GUIADO DE UN VEHÍCULO ESCLAVO DE CARGA Y VEHÍCULO ESCLAVO DE CARGA QUE LO COMPRENDE con el número P202230315. Si se desean conocer más invenciones solicitadas por AR-VR MEIFUS ENGINEERING S.L. clicar aquí.Otras invenciones solicitadas en la clasificación internacional de patentes B25J 17/00,B25J 3/00,B62D 53/00,B60D 99/00.
Es posible conocer invenciones similares al campo de la técnica se refiere. El registro de patente nacional por SISTEMA DE GUIADO DE UN VEHÍCULO ESCLAVO DE CARGA Y VEHÍCULO ESCLAVO DE CARGA QUE LO COMPRENDE con el número P202230315 está clasificado con la clasificación B25J 17/00,B25J 3/00,B62D 53/00,B60D 99/00 por lo que si se desea conocer más registros con la clasificación B25J 17/00,B25J 3/00,B62D 53/00,B60D 99/00 clicar aquí.Otras invenciones solicitadas a través del representante ISABEL CARVAJAL Y URQUIJO
Es posible conocer todas las invenciones solicitadas a través del agente ISABEL CARVAJAL Y URQUIJO entre las que se encuentra el registro patente nacional por SISTEMA DE GUIADO DE UN VEHÍCULO ESCLAVO DE CARGA Y VEHÍCULO ESCLAVO DE CARGA QUE LO COMPRENDE con el número P202230315. Si se desean conocer más invenciones solicitadas a través del agente ISABEL CARVAJAL Y URQUIJO clicar aquí.Patentes en España
Es posible conocer todas las invenciones publicadas en España entre las que se encuentra el registro patente nacional por SISTEMA DE GUIADO DE UN VEHÍCULO ESCLAVO DE CARGA Y VEHÍCULO ESCLAVO DE CARGA QUE LO COMPRENDE. Nuestro portal www.patentes-y-marcas.com ofrece acceso a las publicaciones de patentes en España. Conocer las patentes registradas en un país es importante para saber las posibilidades de fabricar, vender o explotar una invención en España.Patentes registradas en la clase B
Es posible conocer todas las patentes registradas en la clase B (TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTE ) entre las que se encuentra la patente SISTEMA DE GUIADO DE UN VEHÍCULO ESCLAVO DE CARGA Y VEHÍCULO ESCLAVO DE CARGA QUE LO COMPRENDE con el número P202230315. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase B25
Es posible conocer todas las patentes registradas en la clase B25 (HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTORPORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE) entre las que se encuentra la patente SISTEMA DE GUIADO DE UN VEHÍCULO ESCLAVO DE CARGA Y VEHÍCULO ESCLAVO DE CARGA QUE LO COMPRENDE con el número P202230315. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase B25J
Es posible conocer todas las patentes registradas en la clase B25J (MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS) entre las que se encuentra la patente SISTEMA DE GUIADO DE UN VEHÍCULO ESCLAVO DE CARGA Y VEHÍCULO ESCLAVO DE CARGA QUE LO COMPRENDE con el número P202230315. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase B62
Es posible conocer todas las patentes registradas en la clase B62 (VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES) entre las que se encuentra la patente SISTEMA DE GUIADO DE UN VEHÍCULO ESCLAVO DE CARGA Y VEHÍCULO ESCLAVO DE CARGA QUE LO COMPRENDE con el número P202230315. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase B62D
Es posible conocer todas las patentes registradas en la clase B62D (VEHICULOS DE MOTOR; REMOLQUES) entre las que se encuentra la patente SISTEMA DE GUIADO DE UN VEHÍCULO ESCLAVO DE CARGA Y VEHÍCULO ESCLAVO DE CARGA QUE LO COMPRENDE con el número P202230315. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase B60
Es posible conocer todas las patentes registradas en la clase B60 (VEHICULOS EN GENERAL) entre las que se encuentra la patente SISTEMA DE GUIADO DE UN VEHÍCULO ESCLAVO DE CARGA Y VEHÍCULO ESCLAVO DE CARGA QUE LO COMPRENDE con el número P202230315. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase B60D
Es posible conocer todas las patentes registradas en la clase B60D (CONEXIONES PARA VEHICULOS ) entre las que se encuentra la patente SISTEMA DE GUIADO DE UN VEHÍCULO ESCLAVO DE CARGA Y VEHÍCULO ESCLAVO DE CARGA QUE LO COMPRENDE con el número P202230315. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.
¿Tienes alguna duda?
Escribe tu consulta y te responderemos rápida y gratuitamente.

Otras patentes similares
 P202230313
P202230313
Profesionales Recomendados
Barcelona
933182440
España
933182440
España

Barcelona
+34 93 362 16 97
España
+34 93 362 16 97
España

Barcelona
932 593 600
España
932 593 600
España







