


- Home /
- Publicaciones de patentes /
- MÉTODO PARA LA REALIZACIÓN DE TAREAS EN INFRAESTRUCTURAS Y SISTEMA DE VEHÍCULOS NO TRIPULADOS
MÉTODO PARA LA REALIZACIÓN DE TAREAS EN INFRAESTRUCTURAS Y SISTEMA DE VEHÍCULOS NO TRIPULADOS
Patente nacional por "MÉTODO PARA LA REALIZACIÓN DE TAREAS EN INFRAESTRUCTURAS Y SISTEMA DE VEHÍCULOS NO TRIPULADOS"
Este registro ha sido solicitado por
ARBOREA INTELLBIRD S.L.
Contacto
- Estado: Solicitud retirada
- País:
- España
- Fecha solicitud:
- 25/03/2022
- Número solicitud:
-
P202230270
- Número publicación:
-
ES2953760
- Fecha de concesión:
-
- Inventores:
-
Persona física
- Datos del titular:
-
ARBOREA INTELLBIRD S.L.
- Datos del representante:
-
- Clasificación Internacional de Patentes:
- G05D 1/10,B64C 39/02,G08G 5/00
- Clasificación Internacional de Patentes de la publicación:
- G05D 1/10,B64C 39/02,G08G 5/00
- Fecha de vencimiento:
Quiero registrar una patente

Reivindicaciones:
+ ES-2953760_A11. Método para la realización de tareas en infraestructuras que comprende las siguientes etapas: a. Programar una tarea a realizar por al menos un vehículo huésped (2) que se halla alojado en un vehículo base (1) . b. Desplazarse (5) el vehículo base (1) a un primer punto de estacionamiento intermedio (6) ubicado en una infraestructura. c. Partir el al menos un vehículo huésped (2) desde el vehículo base (1) , para ejecutar la tarea programada. d. Retornar el vehículo huésped (2) al vehículo base (1) . 2. Método para la realización de tareas en infraestructuras según la reivindicación 1, caracterizado porque la etapa a) comprende la subetapa de programar una tarea a realizar por el vehículo base (1) , pudiendo dicha tarea consistir en la realización de un desplazamiento, en la adquisición de datos o en ambas. 3. Método para la realización de tareas en infraestructuras según la reivindicación 1, caracterizado porque comprende la etapa adicional de desplazarse (8) el vehículo base (1) desde el primer punto de estacionamiento (6) a al menos un punto ulterior de estacionamiento (9) ubicado en otra infraestructura o en una localización distinta de la misma infraestructura. 4. Método para la realización de tareas en infraestructuras según la reivindicación 1, caracterizado porque se ejecuta bajo control de un sistema de computación configurado con instrucciones ejecutables localizado en una estación de control (3) . 5. Método para la realización de tareas en infraestructuras según la reivindicación 4, caracterizado porque la tarea del al menos un vehículo huésped (2) está programada en el sistema de computación, el cual transmite la tarea al vehículo base (1) , y porque el vehículo base (1) transmite la tarea al al menos un vehículo huésped (2) . 6. Método para la realización de tareas en infraestructuras según la reivindicación 1, caracterizado porque la tarea del al menos un vehículo huésped (2) está programada en un sistema de computación alojado en el vehículo base (1) , y porque al ubicarse en el primer punto de estacionamiento (6) , el vehículo base (1) transmite la tarea al al menos un vehículo huésped (2) . 7. Método para la realización de tareas en infraestructuras según la reivindicación 1, caracterizado porque comprende la etapa adicional de transmitir al vehículo base (1) desde el al menos un vehículo huésped (2) los datos captados por este durante la realización de su tarea. 8. Método para la realización de tareas en infraestructuras según la reivindicación 7, caracterizado porque comprende la etapa adicional de procesar el vehículo base (1) , mientras se halla en un punto de estacionamiento intermedio (6, 9) o en un punto de partida (4) , los datos que le ha transmitido el al menos un vehículo huésped (2) . 9. Método para la realización de tareas en infraestructuras según la reivindicación 8, caracterizado porque el vehículo base (1) transmite a la estación de control (3) los datos resultantes del procesamiento de los datos que le ha transmitido el al menos un vehículo huésped (2) . 10. Método para la realización de tareas en infraestructuras según la reivindicación 3, caracterizado porque el vehículo base (1) realiza tareas de adquisición de datos durante su desplazamiento (5) hasta el primer punto de estacionamiento (6) y en su caso, durante su desplazamiento (8) hasta un punto ulterior de estacionamiento (9) . 11. Sistema de vehículos no tripulados que comprende un vehículo base (1) y al menos un vehículo huésped (2) , caracterizado porque está configurado para ejecutar las etapas del método de las reivindicaciones 1 a 3. 12. Sistema de vehículos no tripulados según la reivindicación 11, caracterizado porque comprende una estación de control (3) que alberga un sistema de computación configurado con instrucciones ejecutables para que el método de las reivindicaciones 1 a 10 se ejecute bajo el control de la estación de control (3) . 13. Sistema de vehículos no tripulados según la reivindicación 11, caracterizado porque el vehículo base (1) comprende al menos una zona de alojamiento del al enos un vehículo huésped (2) y medios para la sujeción (16) del al menos un vehículo huésped (2) . 14. Sistema de vehículos no tripulados según la reivindicación 11, caracterizado porque el vehículo base (1) comprende medios (14, 15) para la recarga de su batería (17) y de la batería del al menos un vehículo huésped (2) . 15. Conjunto de software que contiene un sistema operativo y un programa de ordenador que comprende instrucciones para que la estación de control (3) de la reivindicación 12 ejecute las etapas del método de las reivindicaciones 1 a 10. 16. Medio legible por ordenador que tiene almacenado el programa de ordenador de la reivindicación 15.
Los productos y servicios protegidos por este registro son:
G05D 1/10 - B64C 39/02 - G08G 5/00
Descripciones:
+ ES-2953760_A1 MÉTODO PARA LA REALIZACIÓN DE TAREAS EN INFRAESTRUCTURAS Y SISTEMA DE VEHÍCULOS NO TRIPULADOS SECTOR DE LA TÉCNICA La invención pertenece al sector de los vehículos no tripulados y tiene por objeto un método para la realización de tareas en infraestructuras, tales como su inspección, que se pone en práctica mediante un sistema que comprende un vehículo base y al menos un vehículo huésped, que pueden operar bajo control de una estación de control. ANTECEDENTES DE LA INVENCIÓN Los vehículos no tripulados (de cualquier tipo, sea terrestre, acuático o aéreo, siendo este último el más habitual) pueden emplearse en tareas como la inspección de infraestructuras, la vigilancia (por ejemplo, de fronteras, de bosques para prevenir incendios, de puertos marítimos) o el reparto de mercancías. Este tipo de uso plantea el problema técnico de la limitada autonomía operativa de los vehículos, especialmente cuando se trata de aeronaves no tripuladas. Así, en tareas de inspección o vigilancia, la aeronave ha de realizar complejas maniobras, mantenerse en vuelo estático o captar datos (por ejemplo, fotografías o vídeos) , lo que consume mucha energía y reduce considerablemente su autonomía. Además, las operaciones autónomas o semiautónomas requieren que el vehículo esté equipado con complejos dispositivos electrónicos para el procesamiento a bordo tanto de los obstáculos que se le puedan presentar en su ruta, como de los elementos sobre los que deba adquirir y procesar datos, todo lo cual implica un incremento de masa de la aeronave y un elevado consumo de energía, con la consiguiente limitación de su autonomía operativa. En el sector de las aeronaves no tripuladas se han descrito soluciones consistentes en que un vehículo aloje a otros más pequeños, sirviéndoles de plataforma de lanzamiento o prestándoles algún tipo de apoyo logístico. US2019112049A1 Sistema de lanzamiento portátil (TOP FLIGHT TECHNOLOGIES, INC.) , 18.04.2019, tiene por objeto una primera aeronave no tripulada que aloja a una segunda aeronave, que es lanzada para realizar tareas de toma de datos eteorológicos una vez la primera aeronave ha alcanzado un determinado punto durante su vuelo. US 9, 305, 280 B1 Centro de reparto aerotransportado (AMAZON TECHNOLOGIES, INC.) , 05.04.2016, describe una aeronave que opera como almacén de paquetes de mercancía y que aloja una flota de drones para su reparto. La aeronave almacén, que en una realización adopta una configuración similar a los conocidos dirigibles, puede desplazarse para cubrir unas u otras áreas en las que pueda esperarse un mayor número de pedidos, y mantenerse en el aire durante un largo periodo. En respuesta a un pedido, un dron toma un paquete y realiza un vuelo de descenso para su entrega. El ahorro de energía se consigue porque los drones de reparto no necesitan volar desde una estación terrestre hasta el punto de reparto. En los documentos citados, la aeronave principal abandona su base terrestre y, tras realizar su cometido, habiendo estado en el aire más o menos tiempo, regresa a aquella base, sin estacionamiento en puntos intermedios. En la presente patente, en cambio, el vehículo base se estaciona en al menos un punto intermedio durante su itinerario, desde el cual parten los vehículos huéspedes y al cual regresan una vez realizada su tarea, pudiendo a continuación el vehículo base desplazarse a otro punto de estacionamiento intermedio, o regresar a su punto de partida. Este modo de operar potencia la relación de simbiosis característica de la conjunción entre aeronaves base y huéspedes, y permite emplearlas en tareas relacionadas con infraestructuras, las cuales suelen requerir largos tiempos operativos, por ejemplo, cuando las tareas implican una inspección de una infraestructura lineal. Así, durante el tiempo en que el al menos un vehículo huésped realiza su tarea, el vehículo base está estacionado, lo que reduce sustancialmente su consumo energético. Esto permite dotar al vehículo base de una gran capacidad de procesamiento informático, que podrá emplearse en apoyo de la tarea de los vehículos huéspedes, reduciendo su equipamiento a bordo, lo que, además de conferirles mayor autonomía, permite emplear vehículos de pequeño tamaño, lo cual incrementa su maniobrabilidad, posibilitando tareas que requieran de aproximaciones complejas a elementos de infraestructura, como cables de alta tensión. Además, los vehículos huéspedes podrán recargar su batería en el vehículo base, a su vez dotado de medios de recarga para el huésped y para él mismo. EXPLICACIÓN DE LA INVENCIÓN En un primer aspecto, la invención tiene por objeto un método para la realización de tareas en infraestructuras, tal y como se define en la reivindicación 1. Otros modos de realización preferente se definen en las reivindicaciones dependientes. La puesta en práctica del método requiere de una infraestructura, que servirá de punto de estacionamiento intermedio de la aeronave, o, en su caso, también de punto de partida, además de constituir el objeto en relación con el cual se realizarán las tareas. Se entiende por infraestructura cualquier construcción humana, sea para uso de la población (edificios de viviendas, puentes, carreteras, líneas férreas) , para la producción de energía (por ejemplo, aerogeneradores) , su transporte (por ejemplo, oleoductos, gasoductos, tendidos eléctricos, es decir, infraestructuras lineales) o para fines de vigilancia (por ejemplo, redes de torres u otras estructuras para la vigilancia fronteriza, o contra incendios forestales) u otros fines. En un modo de realización preferente, las tareas en infraestructuras están relacionadas con la inspección de tales infraestructuras, para las que los vehículos no tripulados presentan ventajas de coste y seguridad sobre los vehículos tripulados (por ejemplo, helicópteros) o sobre los equipos humanos. Se entiende por tarea cualquier acción relacionada con una infraestructura y realizada por cualesquiera de los vehículos con los cuales se pone en práctica el método, lo que incluye el recorrer un itinerario o ruta para trasladarse hacia o desde una infraestructura, o a lo largo de ella para inspeccionarla o en tareas de vigilancia, o la adquisición de datos durante el recorrido. También constituye una tarea el procesamiento de los datos adquiridos durante una ruta. El método comprende las etapas de: a) Programar una tarea a realizar por al menos un vehículo huésped (2) que se encuentra alojado en un vehículo base (1) . b) Desplazarse (5) el vehículo base (1) a un primer punto de estacionamiento intermedio (6) ubicado en una infraestructura. c) Partir el al menos un vehículo huésped (2) desde el vehículo base (1) , para jecutar la tarea programada. d) Retornar el vehículo huésped (2) al vehículo base (1) . En un modo de realización, la etapa a) incluye la subetapa de programar una tarea a realizar por el propio vehículo base (1) , pudiendo dicha tarea consistir en la realización de un desplazamiento, en la adquisición de datos o en ambas. En un modo de realización, una vez que el al menos un vehículo huésped (2) regresa al vehículo base (1) , este se desplaza (8) a un segundo punto de estacionamiento intermedio (9) situado en el mismo elemento de infraestructura (por ejemplo, a otro poste de la misma línea de alta tensión) , o a otro elemento de infraestructura (por ejemplo, otra turbina eólica distinta de aquella en la que se ubicaba el primer punto de estacionamiento) . Los estacionamientos intermedios (6, 9) permiten abarcar infraestructuras de amplia extensión, como un parque de generadores eólicos o una infraestructura lineal, tal como un tendido eléctrico de alta tensión. El método puede realizarse bajo control de un operador humano, el cual pilota a la aeronave base (1) . Este pilotaje puede ser presencial, localizándose el piloto en la proximidad de la infraestructura objeto de las tareas; o llevarse a cabo remotamente. En un modo de realización, el método se realiza de un modo autónomo, esto es, bajo control de un sistema de computación alojado en un servidor ubicado en una estación de control (3) y sin intervención humana. En un modo de realización, la tarea del al menos un vehículo huésped (2) está programada en dicho sistema de computación, el cual transmite la tarea al vehículo base (1) , que a su vez transmite la tarea al al menos un vehículo huésped (2) . En un modo de realización, la tarea del al menos un vehículo huésped (2) está programada en un sistema de computación alojado en el vehículo base (1) , el cual, al ubicarse en el primer punto de estacionamiento intermedio (6) , transmite la tarea al al menos un vehículo huésped (2) . En un modo de realización, el método comprende la etapa adicional de transmitir al vehículo base (1) desde el al menos un vehículo huésped (2) los datos captados por este durante la realización de su tarea. En un modo de realización, el método comprende la etapa adicional de procesar el vehículo base (1) , mientras se halla estacionado en un punto de estacionamiento intermedio (6) o en un punto de partida (4) , los datos que le ha transmitido el al menos un vehículo huésped (2) . Al hallarse el vehículo base (1) en posición de estacionamiento, el resultante ahorro de energía optimizará su capacidad de procesamiento de los datos recibidos del al menos un vehículo huésped (2) . En un modo de realización, el vehículo base (1) transmite a la estación de control (3) los datos resultantes del procesamiento de los datos que le ha transmitido el al menos un vehículo huésped (2) . En un modo de realización, el método puede comprender que el propio vehículo base (1) realice tareas de adquisición de datos durante su desplazamiento al primer punto de estacionamiento (6) y, en su caso, a puntos ulteriores de estacionamiento (9) . El método objeto de la presente patente permite un desdoblamiento de tareas entre el vehículo base (1) y el al menos un vehículo huésped (2) que refuerza la eficiencia del conjunto cuando, como aquí se propone, se emplea para tareas en infraestructuras: el vehículo base consume menos energía, porque sus recorridos se limitan a trasladarse al punto de estacionamiento intermedio (6) y en su caso, a puntos de estacionamiento ulteriores (9) y porque un trabajo de gran exigencia energética, cual es el de procesamiento de datos, se realiza en el propio vehículo base (1) y cuando está estacionado. Al no procesar a bordo los datos que adquiere, el al menos un vehículo huésped (2) requerirá de un equipamiento sustancialmente menos complejo que el de un vehículo que hubiera de ser empleado en tales tareas sin el auxilio de un vehículo base (1) , lo que de por sí implica un ahorro de energía. Además, se puede emplear un vehículo huésped (2) de pequeño tamaño, lo que incrementa el ahorro energético y le dota de mayor capacidad de maniobra, característica especialmente ventajosa en tareas relacionadas con infraestructuras. En un segundo aspecto, la invención tiene por objeto un sistema de vehículos no tripulados, según se define en la reivindicación 11. Otros modos de realización preferente se definen en las reivindicaciones dependientes. Los vehículos no tripulados mediante los cuales puede practicarse esta invención ueden ser de cualquier tipo, por ejemplo, de desplazamiento terrestre (conocidos como UGV, acrónimo de Unmanned Ground Vehicle o vehículo terrestre no tripulado) , acuático (ROUV o ROV, Remotedly Operated Underwater Vehicle o vehículo subacuático operado remotamente) , o aéreo (UAV, Unmanned Aerial Vehicle o vehículo aéreo no tripulado, comúnmente conocidos como drones) . El sistema de vehículos no tripulados está configurado para ejecutar las etapas del método de realización de tareas que es objeto de esta patente. El sistema comprende un vehículo base (1) y al menos un vehículo huésped (2) . Pueden emplearse distintos tipos de vehículos para configurar el conjunto, por ejemplo, el vehículo base (1) puede ser un UAV que aloje uno o varios vehículos de desplazamiento terrestre; y además uno o varios UAV. Preferentemente, tanto el vehículo base (1) como el al menos un vehículo huésped (2) son vehículos aéreos no tripulados. El vehículo base (1) comprende al menos una zona de alojamiento de al menos un vehículo huésped (2) . En un modo de realización, el vehículo base (1) comprende varias zonas de alojamiento (13) para sendos vehículos huéspedes (2) . En un modo de realización, en el vehículo base (1) se disponen medios (16) para la sujeción del al menos un vehículo huésped (2) . El vehículo base (1) comprende medios de recarga (14, 15) de su batería (17) y medios (18) para recargar la batería del al menos un vehículo huésped (2) . El vehículo base (1) está configurado para desplazarse (5) a un primer punto de estacionamiento intermedio (6) ubicado en una infraestructura, donde queda estacionado temporalmente, por ejemplo, en una torre de un tendido de alta tensión, una torreta de vigilancia fronteriza o contra incendios, o en la góndola de una turbina eólica. Para alcanzar el primer punto de estacionamiento intermedio (6) , el vehículo base (1) puede partir de cualquier punto, tal como una base fija (lo que, en el caso de aeronaves no tripuladas, se conoce como nido) , desde donde realizaría un vuelo autónomo preprogramado hasta el primer punto de estacionamiento intermedio (6) y en su caso, de ahí hasta ulteriores puntos de estacionamiento intermedio (9) . En un modo de ealización, la base fija (4) está situada en una infraestructura, por ejemplo, en la góndola de un aerogenerador o en un poste de una línea de alta tensión, desde donde el vehículo base (1) se desplazaría hasta el primer punto de estacionamiento intermedio (6) , que estaría localizado en otro aerogenerador del mismo parque eólico (y en su caso hasta un segundo punto de estacionamiento intermedio (9) en otro aerogenerador, y así sucesivamente) ; o en otro poste de la línea eléctrica. Asimismo, el vehículo base (1) puede partir desde un punto sustancialmente localizado en la proximidad de la infraestructura, por ejemplo, cuando haya sido trasladado hasta ese punto por un operador que lo vaya a pilotar hasta el primer punto de estacionamiento intermedio (6) o sucesivos (9) . El vehículo base (1) y el al menos un vehículo huésped (2) están configurados para comunicarse entre sí. En un ejemplo de realización, el propio vehículo base (1) puede llevar a bordo equipamiento para la adquisición de datos, de modo que realice tareas de este tipo durante su desplazamiento al primer punto de estacionamiento intermedio (6) y en su caso, a ulteriores puntos de estacionamiento intermedio (9) . En un modo de realización, el sistema comprende una estación de control (3) configurada para comunicarse con el vehículo base (1) , en cuyo caso el vehículo base (1) estará configurado para comunicarse con la estación de control (3) . La estación de control (3) comprende un sistema de computación en el cual se aloja un conjunto de software que contiene un sistema operativo y un programa configurado para ejecutar las etapas del método objeto de esta patente en uno de sus modos de realización, en que el método se ejecuta bajo control de un sistema de computación. BREVE DESCRIPCIÓN DE LOS DIBUJOS Para complementar la descripción se acompaña un juego de dibujos, que con carácter ilustrativo y no limitativo representan lo siguiente: Figura 1.- Esquema del método de realización de tareas en infraestructuras, en un modo de realización preferente en el que la infraestructura es una turbina eólica y el método se pone en práctica mediante aeronaves no tripuladas. Figura 2.- vehículos no tripulados base y huéspedes en un modo de realización en que dichos vehículos son aeronaves multirrotor. Figura 3.- Vista en corte de sección vertical de una parte de una aeronave base y de una aeronave huésped. REALIZACIÓN PREFERENTE DE LA INVENCIÓN En un primer aspecto, la presente invención tiene por objeto un método para la realización de tareas en infraestructuras. En un modo de realización preferente, que se ilustra en la Fig. 1, las tareas en infraestructuras son realizadas por un sistema que comprende un vehículo no tripulado base (1) y tres vehículos no tripulados que se alojan en el vehículo base (1) , por lo que se denominan vehículos huéspedes (2) . En todos los modos de realización preferente del método descritos en esta patente se asume que el método se realiza por esta pluralidad de tres vehículos huéspedes (2) , no siendo este número más que a título ejemplificativo, pudiendo el método ejecutarse igual con otro número distinto, con tal de que se disponga de al menos un vehículo huésped (2) . En este modo de realización preferente, tanto los vehículos base (1) como huéspedes (2) son aeronaves no tripuladas del tipo multirrotor. En el modo de realización ilustrado en la Fig. 1, las infraestructuras sobre la que se realizan las tareas son las turbinas de un parque de generación de energía eólica. Las tareas que normalmente se realizan en este tipo de infraestructuras están relacionadas con su inspección, con el fin de detectar defectos tales como grietas en las palas. Por tanto, quedan comprendidas en el concepto de tareas, tal y como se definen en esta patente, los desplazamientos o rutas (5) del vehículo base (1) hasta un primer punto de estacionamiento intermedio (6) , sus rutas (8) a puntos de estacionamiento ulteriores (9) , los desplazamientos o rutas de los vehículos huéspedes (2) a lo largo de la infraestructura (en este caso, normalmente a lo largo de las palas de los aerogeneradores) , la adquisición de datos por los vehículos huéspedes (2) o, en su caso, por el vehículo base (1) y el procesamiento de dichos datos por el vehículo base (1) . En el modo de realización preferido, mostrado en la misma Fig. 1, la aeronave base (1) está estacionada permanentemente en un punto fijo (nido) (4) ubicado en una góndola de uno de los aerogeneradores del parque eólico. Para fines de mantenimiento u otros, la aeronave (1) puede ser dirigida cuando se desee hacia la base del aerogenerador u otro punto donde el operador responsable pueda tomar posesión de ella. En un modo de realización, el método ilustrado en la Fig. 1 se implementa bajo el control de un dispositivo informático configurado con instrucciones ejecutables y localizado en una estación de control (3) , la cual puede estar ubicada en una localización remota con respecto a los vehículos (1, 2) que realizan las tareas. Partiendo de que el programa de mantenimiento de las turbinas establece la realización de tareas de inspección a intervalos de tiempo determinados, la primera etapa del método, conforme al modo de realización que se propone, comprende programar sendas tareas a realizar por el al menos un vehículo huésped (2) . Estas tareas pueden consistir, en un modo de realización, en una ruta que cada una de las tres aeronaves huéspedes (2) deberá realizar a lo largo de sendas palas de la turbina y en tareas de adquisición de datos (captación de imágenes fotográficas, de vídeo o LIDAR) durante las rutas. Asimismo, cuando el vuelo que vaya a realizar el vehículo base (1) sea en modo autónomo, su ruta constituirá una tarea que deberá ser programada, constituyendo este paso una subetapa de la primera etapa del método. Las tareas son programadas por el operador a cargo de los vehículos (1, 2) . Estas programaciones pueden quedar alojadas en una unidad de memoria ubicada en el dispositivo informático de la estación de control (3) , o en un servidor en la nube, de acceso remoto desde la estación de control (3) , siendo en ambos casos transmitidas (7) (vía WiFi o radio) preferentemente a la aeronave base (1) . Asimismo, las programaciones pueden quedar alojadas desde un primer momento en el microcontrolador de la aeronave base (1) , de donde las tareas correspondientes a las aeronaves huéspedes (2) se transmitirían a estas, preferentemente vía radio. En otro modo de realización, las programaciones concernientes a los vehículos huéspedes (2) pueden desde un primer momento alojarse en sus respectivos microcontroladores. En un modo de realización, las rutas están definidas por una secuencia de puntos espaciales de posicionamiento, conocidos en la técnica como waypoints, los cuales onsisten en un conjunto de coordenadas que identifican un punto específico en el espacio mediante las tres dimensiones (longitud, latitud, altitud) . La programación del itinerario de una aeronave no tripulada puede realizarse de distintas maneras conocidas por el experto en la materia. La realización de tareas incluye la adquisición de datos, por ejemplo, captación de imágenes mediante cámaras fotográficas, de vídeos o sensores LIDAR. Los puntos donde deban realizarse tareas de adquisición de datos pueden estar asociadas a los waypoints que definen las rutas de las aeronaves (1, 2) . Una segunda etapa del método reivindicado consiste en que el UAV base (1) , llevando a bordo a los tres UAVs huéspedes (2) , se desplaza (5) a un primer punto de estacionamiento (6) ubicado en una infraestructura. En el modo de realización ilustrado en la Fig. 1, el punto de partida (4) para dicho desplazamiento (5) es un nido permanentemente ubicado en una góndola de una turbina eólica de un parque de aerogeneradores. Y el primer punto de estacionamiento intermedio (6) está ubicado en una góndola de otra turbina eólica del mismo parque eólico. El vuelo hacia el primer punto de estacionamiento (6) puede ser ejecutado bajo control de un piloto humano desplazado hasta la proximidad del aerogenerador, o puede tratarse de un vuelo en modo autónomo. Una tercera etapa se ejecuta cuando los vehículos huéspedes (2) parten del vehículo base (1) para ejecutar las tareas programadas. En un modo de realización, la orden de partir es impartida por el microcontrolador del vehículo base (1) . En este mismo momento el microcontrolador del vehículo base (1) transmitirá vía radio su correspondiente ruta a cada una de las aeronaves huéspedes (2) . En otra posibilidad, las aeronaves huéspedes (2) pueden llevar programadas sus tareas en sus respectivos microcontroladores, por lo que no será necesario que el vehículo base (1) se las transmita en este momento. En una cuarta etapa, los vehículos huéspedes (2) regresan al vehículo base (1) . El vehículo base (1) , siguiendo las órdenes del piloto humano, de su microcontrolador o de la estación de control (3) , puede entonces regresar al punto de partida (4) ; o bien, en otro modo de realización, puede desplazarse (8) hasta un segundo punto de stacionamiento (9) , que se localizaría, en este modo de realización, en una turbina distinta, sobre la cual los vehículos huéspedes (2) realizarían las correspondientes tareas programadas conforme a la primera etapa del método. Como se ha mencionado, las tareas de los vehículos huéspedes (2) incluyen la adquisición de datos. En un modo de realización, el método incluye la etapa adicional de que dichos UAVs huéspedes (2) transmitan los datos al UAV base (1) . Según distintos modos de realización, esta transmisión puede tener lugar en tiempo real, o ejecutarse mediante volcado de datos vía radio una vez las aeronaves huéspedes (2) han regresado a la aeronave base (1) . En un modo de realización, la aeronave base (1) procesa los datos que le han transmitido las aeronaves huéspedes (2) . Cuando los datos se le van transmitiendo en tiempo real, el resultado del procesamiento puede ser la emisión de órdenes de acciones dirigidas a los vehículos huéspedes (2) que correspondan, con el fin de que estos realicen determinadas tareas. Por ejemplo, si de los datos procesados por las aeronaves huéspedes (2) resulta la presencia de lo que pudiera ser una grieta en la pala, la orden de acción puede ser la de tomar datos con una mayor proximidad. De este modo, la tarea inicialmente programada para el vehículo huésped (2) de que se trate puede verse modificada durante su realización. Asimismo, en un modo de realización, el procesamiento por el vehículo base (1) de la información recibida de los vehículos huéspedes (2) (independientemente de que la haya recibido en tiempo real o por volcado posterior) resulta en el envío (10) a la estación de control (3) de un archivo codificado, en el cual se contiene la información relativa a los elementos dañados que hayan podido detectarse en la infraestructura. De este modo, se evita tener que enviar a la estación de control (3) todos los datos adquiridos por los vehículos huéspedes (2) durante la realización de sus tareas, lo que supondría un ingente volumen de información, sustituyéndolos únicamente por la información relevante. En un segundo aspecto, la presente invención tiene por objeto un sistema de vehículos no tripulados. El sistema se caracteriza porque está configurado para ejecutar las etapas del método de realización de tareas que es objeto de esta patente. El sistema comprende un vehículo base (1) y al menos un vehículo huésped (2) . En un modo de realización preferente, mostrado en la Fig.2, los vehículos mediante los cuales se implementa la invención son vehículos aéreos no tripulados, en concreto del tipo multirrotor, esto es, de los que comprenden varios rotores asociados a sendos motores de propulsión. Este tipo de configuración permite aterrizajes y despegues verticales y el vuelo estacionario, por lo que estos drones son los más aptos para la realización del tipo de tareas que ejemplificativamente se describen en esta patente. La aeronave base (1) representada en la Fig. 2 comprende una plataforma (11) de la que sobresalen cuatro cuerpos de forma circular (12) , en cada uno de los cuales se ubica un rotor de propulsión, asociado a su correspondiente motor. La plataforma (11) está operativamente acoplada a un dispositivo de procesamiento informático, que comprende un microcontrolador estándar, el cual gestiona el funcionamiento de los motores y rotores asociados. El microcontrolador además integra un dispositivo de comunicaciones, de tipo receptor de radio o de tipo router con tarjeta SIM para facilitar las comunicaciones en baja latencia. La configuración mecánica básica de la aeronave base (1) no varía con respecto a los existentes en el sector. El experto la configurará con unos u otros dispositivos de navegación y comunicación según vaya a ser pilotada presencial o remotamente, o a realizar un vuelo autónomo; o según si el sistema se ha configurado o no con una estación de control (3) con la que se comunicará el UAV base (1) . Más específicamente, el UAV base (1) estará equipado con los dispositivos de procesamiento informático que el experto entienda necesarios en función de que el UAV base (1) vaya o no a recibir datos de los vehículos huéspedes (2) , y de si los va a recibir en tiempo real o por volcado y si los va a procesar a bordo. En un ejemplo de realización, el microcontrolador está conectado a distintos dispositivos periféricos: por un lado, los sensores de ubicación espacio-temporal de la aeronave base (1) conocidos en la técnica: giróscopo, acelerómetro, barómetro, magnetómetro, un sistema de posicionamiento por satélite capaz de conectarse a varias redes satélites, como GPS, GLONASS, BeiDou o GALILEO y un sistema de posicionamiento de alta precisión, por ejemplo, un sistema del tipo RTK (Real-Time Kinematics) . Por otro lado, dispositivos periféricos (entre otros, cámaras fotográficas o de vídeo, cámaras de espectro térmico por infrarrojos o sensores LIDAR de barrido) con una finalidad de detección de obstáculos y adicionalmente de detección de elementos sobre los que ealizar adquisición de datos, en relación con el modo de realización conforme al cual el propio vehículo base (1) realiza tareas de adquisición de datos, de manera complementaria a las tareas de la misma índole efectuadas por el al menos un vehículo huésped. En la plataforma (11) de la aeronave base (1) se disponen tres concavidades de forma cilíndrica (13) que sirven de zonas de alojamiento para sendas aeronaves huéspedes (2) . Las concavidades (13) son de una altura ligeramente mayor que la de las aeronaves huéspedes (2) , de modo que estas quedan protegidas por los lados de las concavidades (13) y a salvo del viento durante el vuelo de la aeronave base (1) . En un modo de realización, la aeronave base (1) comprende medios (16) para la sujeción de las aeronaves huéspedes (2) , como muestra la Fig. 3. El UAV base (1) comprende además medios de recarga de su batería. En el ejemplo de la Fig. 2, los medios de recarga consisten en un dispositivo cruciforme (14) cuyos brazos emergen entre los cuerpos circulares (12) y sobre cuya cara superior se disponen células fotovoltaicas (15) , operativamente conectadas con la batería (17, mostrada en Fig. 3) del vehículo base (1) . Alternativamente a los medios de recarga descritos, cuando el vehículo base (1) tenga su punto de partida (4) o su primer punto de estacionamiento intermedio (6) o un punto de estacionamiento ulterior (9) en la góndola de un aerogenerador, se aprovecharía la corriente eléctrica disponible en el aerogenerador para alimentar a la aeronave base (1) . En un modo de realización, se emplearía un dispositivo de recarga inalámbrica, existente en el estado de la técnica. En concreto, la aeronave base (1) llevaría adosada a la cara inferior de su cuerpo central una placa, que al aterrizar quedaría en la proximidad de una placa de carga dispuesta en la superficie superior de la góndola. El vehículo base (1) está configurado para desplazarse (5) desde su punto de partida (4) a un primer punto de estacionamiento (6) ubicado en una infraestructura, por ejemplo, en una torre de un tendido de alta tensión, una torreta de vigilancia fronteriza o contra incendios, o en la góndola de una turbina eólica. Las aeronaves huéspedes (2) son asimismo del tipo multirrotor, pudiendo escogerse de entre las disponibles en el mercado. Se las equipará con unos u otros dispositivos de avegación, de comunicación y de adquisición de datos según sea la índole de la tarea asignada, siendo esta una operación conocida por el experto en la materia. Estas aeronaves tienen la ventaja de que, al poder ser de pequeño tamaño, gastan menos energía y tienen más agilidad y capacidad de aproximarse a los distintos elementos de la infraestructura. El vehículo base (1) y los vehículos huéspedes (2) están configurados para comunicarse entre sí. Dichas comunicaciones pueden ser vía WiFi o por redes inalámbricas de área personal (WPAN) con arreglo al estándar Bluetooth® u otros sistemas de comunicación radio. En un modo de realización, el sistema comprende una estación de control (3) configurada para comunicarse con el vehículo principal (1) , en cuyo caso este vehículo (1) estará a su vez configurado para comunicarse con la estación de control (3) . En un ejemplo de realización, esta comunicación bidireccional se realiza en tiempo real mediante un protocolo de comunicación de baja latencia, por ejemplo, un protocolo de comunicación 5G. La estación de control (3) comprende un sistema de computación en el cual se aloja un conjunto de software que contiene un sistema operativo y un programa configurado para ejecutar las etapas del método, en el modo de realización preferido en que el método se ejecuta bajo control de un sistema de computación. En un ejemplo de realización, la estación de control (3) comprende los siguientes componentes: un sistema de computación, el cual comprende al menos un circuito que integra procesadores multinúcleo, una placa base, unidades de memoria RAM, medios de almacenamiento, una tarjeta gráfica configurada para procesar gran volumen de información en forma de imágenes; fuente de alimentación, medios de refrigeración y tarjeta de red y de comunicaciones en formato de baja latencia, como por ejemplo un sistema basado en comunicación tipo router con tarjeta SIM. En experto en la materia, en función de las necesidades previsibles, podrá configurar la estación de control (3) con equipamientos de más o menos capacidad de entre los disponibles en el estado de la técnica. En un modo de realización, la aeronave base (1) comprende un sistema de procesado computación en tiempo real que le permita analizar las imágenes y datos transmitidos en tiempo real por las aeronaves huéspedes (2) , mediante recursos de inteligencia artificial, por ejemplo, de visión computerizada y análisis de nubes de puntos LIDAR y fotogramétricas, con el fin de implementar procesos de detectar/evitar/actuar transmisibles en tiempo real a las aeronaves huéspedes (2) y con el fin de detectar y reportar a la estación de control (3) de manera autónoma aquellos elementos de la infraestructura que se encuentran dañados, ahorrando el envío de las imágenes de toda la infraestructura y optimizando así el tamaño de los paquetes de información que se envíen. La Fig. 3 es una vista en sección vertical de una porción de una aeronave base (1) y de una aeronave huésped (2) . En este dibujo se muestran los medios dispuestos en la aeronave base (1) para la sujeción de la aeronave huésped (2) . En el fondo de cada una de las concavidades de alojamiento (13) de la aeronave base (1) se disponen dos pinzas (16) , que se cierran sobre las patas de la aeronave huésped (2) . Las pinzas (16) están operativamente conectadas a sendos sensores y a respectivos servomotores de accionamiento. Cuando la aeronave base (1) transmite a la aeronave huésped (2) la orden de despegue, el microcontrolador de la aeronave base (1) acciona los servomotores, que abren las pinzas (16) . Cuando la aeronave huésped (16) se posa en su alojamiento (13) , el contacto es detectado por los sensores, que causan el accionamiento de los servomotores, cerrándose las pinzas (16) y sujetando a la aeronave huésped (2) en su concavidad (13) . Este tipo de sistema de cierre mediante pinzas (16) , sensores y servomotores es conocido en el estado de la técnica. La Fig. 3 ejemplifica asimismo los medios de recarga de la batería del vehículo huésped. La batería (17) del vehículo base (1) está conectada con un puerto de conexión (18) , que emerge de la base de la concavidad (13) y la cual se inserta en un puerto de alimentación de la aeronave huésped, cuando esta queda alojada en dicha concavidad (13) .
Publicaciones:
ES2953760 (15/11/2023) - A1 Solicitud de patente con informe sobre el estado de la técnica
Eventos:
En fecha 25/03/2022 se realizó Registro Instancia de Solicitud
En fecha 25/03/2022 se realizó Admisión a Trámite
En fecha 25/03/2022 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 01/06/2022 se realizó Superado examen de oficio
En fecha 15/09/2022 se realizó Realizado IET
En fecha 20/09/2022 se realizó 1109P_Comunicación Traslado del IET
En fecha 15/11/2023 se realizó Publicación Solicitud
En fecha 15/11/2023 se realizó Publicación Folleto Solicitud con IET (A1)
En fecha 01/03/2024 se realizó Validación petición y/o pago de examen sustantivo no conforme
En fecha 01/03/2024 se realizó Retirada
En fecha 01/03/2024 se realizó 1108P_Notificación retirada solicitud por no petición y/o pago de examen sustantivo
En fecha 07/03/2024 se realizó Publicación retirada solicitud por no petición y/o pago de examen sustantivo
Pagos:
25/03/2022 - Pago Tasas IET
+ ES-2953760_A11. Método para la realización de tareas en infraestructuras que comprende las siguientes etapas: a. Programar una tarea a realizar por al menos un vehículo huésped (2) que se halla alojado en un vehículo base (1) . b. Desplazarse (5) el vehículo base (1) a un primer punto de estacionamiento intermedio (6) ubicado en una infraestructura. c. Partir el al menos un vehículo huésped (2) desde el vehículo base (1) , para ejecutar la tarea programada. d. Retornar el vehículo huésped (2) al vehículo base (1) . 2. Método para la realización de tareas en infraestructuras según la reivindicación 1, caracterizado porque la etapa a) comprende la subetapa de programar una tarea a realizar por el vehículo base (1) , pudiendo dicha tarea consistir en la realización de un desplazamiento, en la adquisición de datos o en ambas. 3. Método para la realización de tareas en infraestructuras según la reivindicación 1, caracterizado porque comprende la etapa adicional de desplazarse (8) el vehículo base (1) desde el primer punto de estacionamiento (6) a al menos un punto ulterior de estacionamiento (9) ubicado en otra infraestructura o en una localización distinta de la misma infraestructura. 4. Método para la realización de tareas en infraestructuras según la reivindicación 1, caracterizado porque se ejecuta bajo control de un sistema de computación configurado con instrucciones ejecutables localizado en una estación de control (3) . 5. Método para la realización de tareas en infraestructuras según la reivindicación 4, caracterizado porque la tarea del al menos un vehículo huésped (2) está programada en el sistema de computación, el cual transmite la tarea al vehículo base (1) , y porque el vehículo base (1) transmite la tarea al al menos un vehículo huésped (2) . 6. Método para la realización de tareas en infraestructuras según la reivindicación 1, caracterizado porque la tarea del al menos un vehículo huésped (2) está programada en un sistema de computación alojado en el vehículo base (1) , y porque al ubicarse en el primer punto de estacionamiento (6) , el vehículo base (1) transmite la tarea al al menos un vehículo huésped (2) . 7. Método para la realización de tareas en infraestructuras según la reivindicación 1, caracterizado porque comprende la etapa adicional de transmitir al vehículo base (1) desde el al menos un vehículo huésped (2) los datos captados por este durante la realización de su tarea. 8. Método para la realización de tareas en infraestructuras según la reivindicación 7, caracterizado porque comprende la etapa adicional de procesar el vehículo base (1) , mientras se halla en un punto de estacionamiento intermedio (6, 9) o en un punto de partida (4) , los datos que le ha transmitido el al menos un vehículo huésped (2) . 9. Método para la realización de tareas en infraestructuras según la reivindicación 8, caracterizado porque el vehículo base (1) transmite a la estación de control (3) los datos resultantes del procesamiento de los datos que le ha transmitido el al menos un vehículo huésped (2) . 10. Método para la realización de tareas en infraestructuras según la reivindicación 3, caracterizado porque el vehículo base (1) realiza tareas de adquisición de datos durante su desplazamiento (5) hasta el primer punto de estacionamiento (6) y en su caso, durante su desplazamiento (8) hasta un punto ulterior de estacionamiento (9) . 11. Sistema de vehículos no tripulados que comprende un vehículo base (1) y al menos un vehículo huésped (2) , caracterizado porque está configurado para ejecutar las etapas del método de las reivindicaciones 1 a 3. 12. Sistema de vehículos no tripulados según la reivindicación 11, caracterizado porque comprende una estación de control (3) que alberga un sistema de computación configurado con instrucciones ejecutables para que el método de las reivindicaciones 1 a 10 se ejecute bajo el control de la estación de control (3) . 13. Sistema de vehículos no tripulados según la reivindicación 11, caracterizado porque el vehículo base (1) comprende al menos una zona de alojamiento del al enos un vehículo huésped (2) y medios para la sujeción (16) del al menos un vehículo huésped (2) . 14. Sistema de vehículos no tripulados según la reivindicación 11, caracterizado porque el vehículo base (1) comprende medios (14, 15) para la recarga de su batería (17) y de la batería del al menos un vehículo huésped (2) . 15. Conjunto de software que contiene un sistema operativo y un programa de ordenador que comprende instrucciones para que la estación de control (3) de la reivindicación 12 ejecute las etapas del método de las reivindicaciones 1 a 10. 16. Medio legible por ordenador que tiene almacenado el programa de ordenador de la reivindicación 15.
Los productos y servicios protegidos por este registro son:
G05D 1/10 - B64C 39/02 - G08G 5/00
Descripciones:
+ ES-2953760_A1 MÉTODO PARA LA REALIZACIÓN DE TAREAS EN INFRAESTRUCTURAS Y SISTEMA DE VEHÍCULOS NO TRIPULADOS SECTOR DE LA TÉCNICA La invención pertenece al sector de los vehículos no tripulados y tiene por objeto un método para la realización de tareas en infraestructuras, tales como su inspección, que se pone en práctica mediante un sistema que comprende un vehículo base y al menos un vehículo huésped, que pueden operar bajo control de una estación de control. ANTECEDENTES DE LA INVENCIÓN Los vehículos no tripulados (de cualquier tipo, sea terrestre, acuático o aéreo, siendo este último el más habitual) pueden emplearse en tareas como la inspección de infraestructuras, la vigilancia (por ejemplo, de fronteras, de bosques para prevenir incendios, de puertos marítimos) o el reparto de mercancías. Este tipo de uso plantea el problema técnico de la limitada autonomía operativa de los vehículos, especialmente cuando se trata de aeronaves no tripuladas. Así, en tareas de inspección o vigilancia, la aeronave ha de realizar complejas maniobras, mantenerse en vuelo estático o captar datos (por ejemplo, fotografías o vídeos) , lo que consume mucha energía y reduce considerablemente su autonomía. Además, las operaciones autónomas o semiautónomas requieren que el vehículo esté equipado con complejos dispositivos electrónicos para el procesamiento a bordo tanto de los obstáculos que se le puedan presentar en su ruta, como de los elementos sobre los que deba adquirir y procesar datos, todo lo cual implica un incremento de masa de la aeronave y un elevado consumo de energía, con la consiguiente limitación de su autonomía operativa. En el sector de las aeronaves no tripuladas se han descrito soluciones consistentes en que un vehículo aloje a otros más pequeños, sirviéndoles de plataforma de lanzamiento o prestándoles algún tipo de apoyo logístico. US2019112049A1 Sistema de lanzamiento portátil (TOP FLIGHT TECHNOLOGIES, INC.) , 18.04.2019, tiene por objeto una primera aeronave no tripulada que aloja a una segunda aeronave, que es lanzada para realizar tareas de toma de datos eteorológicos una vez la primera aeronave ha alcanzado un determinado punto durante su vuelo. US 9, 305, 280 B1 Centro de reparto aerotransportado (AMAZON TECHNOLOGIES, INC.) , 05.04.2016, describe una aeronave que opera como almacén de paquetes de mercancía y que aloja una flota de drones para su reparto. La aeronave almacén, que en una realización adopta una configuración similar a los conocidos dirigibles, puede desplazarse para cubrir unas u otras áreas en las que pueda esperarse un mayor número de pedidos, y mantenerse en el aire durante un largo periodo. En respuesta a un pedido, un dron toma un paquete y realiza un vuelo de descenso para su entrega. El ahorro de energía se consigue porque los drones de reparto no necesitan volar desde una estación terrestre hasta el punto de reparto. En los documentos citados, la aeronave principal abandona su base terrestre y, tras realizar su cometido, habiendo estado en el aire más o menos tiempo, regresa a aquella base, sin estacionamiento en puntos intermedios. En la presente patente, en cambio, el vehículo base se estaciona en al menos un punto intermedio durante su itinerario, desde el cual parten los vehículos huéspedes y al cual regresan una vez realizada su tarea, pudiendo a continuación el vehículo base desplazarse a otro punto de estacionamiento intermedio, o regresar a su punto de partida. Este modo de operar potencia la relación de simbiosis característica de la conjunción entre aeronaves base y huéspedes, y permite emplearlas en tareas relacionadas con infraestructuras, las cuales suelen requerir largos tiempos operativos, por ejemplo, cuando las tareas implican una inspección de una infraestructura lineal. Así, durante el tiempo en que el al menos un vehículo huésped realiza su tarea, el vehículo base está estacionado, lo que reduce sustancialmente su consumo energético. Esto permite dotar al vehículo base de una gran capacidad de procesamiento informático, que podrá emplearse en apoyo de la tarea de los vehículos huéspedes, reduciendo su equipamiento a bordo, lo que, además de conferirles mayor autonomía, permite emplear vehículos de pequeño tamaño, lo cual incrementa su maniobrabilidad, posibilitando tareas que requieran de aproximaciones complejas a elementos de infraestructura, como cables de alta tensión. Además, los vehículos huéspedes podrán recargar su batería en el vehículo base, a su vez dotado de medios de recarga para el huésped y para él mismo. EXPLICACIÓN DE LA INVENCIÓN En un primer aspecto, la invención tiene por objeto un método para la realización de tareas en infraestructuras, tal y como se define en la reivindicación 1. Otros modos de realización preferente se definen en las reivindicaciones dependientes. La puesta en práctica del método requiere de una infraestructura, que servirá de punto de estacionamiento intermedio de la aeronave, o, en su caso, también de punto de partida, además de constituir el objeto en relación con el cual se realizarán las tareas. Se entiende por infraestructura cualquier construcción humana, sea para uso de la población (edificios de viviendas, puentes, carreteras, líneas férreas) , para la producción de energía (por ejemplo, aerogeneradores) , su transporte (por ejemplo, oleoductos, gasoductos, tendidos eléctricos, es decir, infraestructuras lineales) o para fines de vigilancia (por ejemplo, redes de torres u otras estructuras para la vigilancia fronteriza, o contra incendios forestales) u otros fines. En un modo de realización preferente, las tareas en infraestructuras están relacionadas con la inspección de tales infraestructuras, para las que los vehículos no tripulados presentan ventajas de coste y seguridad sobre los vehículos tripulados (por ejemplo, helicópteros) o sobre los equipos humanos. Se entiende por tarea cualquier acción relacionada con una infraestructura y realizada por cualesquiera de los vehículos con los cuales se pone en práctica el método, lo que incluye el recorrer un itinerario o ruta para trasladarse hacia o desde una infraestructura, o a lo largo de ella para inspeccionarla o en tareas de vigilancia, o la adquisición de datos durante el recorrido. También constituye una tarea el procesamiento de los datos adquiridos durante una ruta. El método comprende las etapas de: a) Programar una tarea a realizar por al menos un vehículo huésped (2) que se encuentra alojado en un vehículo base (1) . b) Desplazarse (5) el vehículo base (1) a un primer punto de estacionamiento intermedio (6) ubicado en una infraestructura. c) Partir el al menos un vehículo huésped (2) desde el vehículo base (1) , para jecutar la tarea programada. d) Retornar el vehículo huésped (2) al vehículo base (1) . En un modo de realización, la etapa a) incluye la subetapa de programar una tarea a realizar por el propio vehículo base (1) , pudiendo dicha tarea consistir en la realización de un desplazamiento, en la adquisición de datos o en ambas. En un modo de realización, una vez que el al menos un vehículo huésped (2) regresa al vehículo base (1) , este se desplaza (8) a un segundo punto de estacionamiento intermedio (9) situado en el mismo elemento de infraestructura (por ejemplo, a otro poste de la misma línea de alta tensión) , o a otro elemento de infraestructura (por ejemplo, otra turbina eólica distinta de aquella en la que se ubicaba el primer punto de estacionamiento) . Los estacionamientos intermedios (6, 9) permiten abarcar infraestructuras de amplia extensión, como un parque de generadores eólicos o una infraestructura lineal, tal como un tendido eléctrico de alta tensión. El método puede realizarse bajo control de un operador humano, el cual pilota a la aeronave base (1) . Este pilotaje puede ser presencial, localizándose el piloto en la proximidad de la infraestructura objeto de las tareas; o llevarse a cabo remotamente. En un modo de realización, el método se realiza de un modo autónomo, esto es, bajo control de un sistema de computación alojado en un servidor ubicado en una estación de control (3) y sin intervención humana. En un modo de realización, la tarea del al menos un vehículo huésped (2) está programada en dicho sistema de computación, el cual transmite la tarea al vehículo base (1) , que a su vez transmite la tarea al al menos un vehículo huésped (2) . En un modo de realización, la tarea del al menos un vehículo huésped (2) está programada en un sistema de computación alojado en el vehículo base (1) , el cual, al ubicarse en el primer punto de estacionamiento intermedio (6) , transmite la tarea al al menos un vehículo huésped (2) . En un modo de realización, el método comprende la etapa adicional de transmitir al vehículo base (1) desde el al menos un vehículo huésped (2) los datos captados por este durante la realización de su tarea. En un modo de realización, el método comprende la etapa adicional de procesar el vehículo base (1) , mientras se halla estacionado en un punto de estacionamiento intermedio (6) o en un punto de partida (4) , los datos que le ha transmitido el al menos un vehículo huésped (2) . Al hallarse el vehículo base (1) en posición de estacionamiento, el resultante ahorro de energía optimizará su capacidad de procesamiento de los datos recibidos del al menos un vehículo huésped (2) . En un modo de realización, el vehículo base (1) transmite a la estación de control (3) los datos resultantes del procesamiento de los datos que le ha transmitido el al menos un vehículo huésped (2) . En un modo de realización, el método puede comprender que el propio vehículo base (1) realice tareas de adquisición de datos durante su desplazamiento al primer punto de estacionamiento (6) y, en su caso, a puntos ulteriores de estacionamiento (9) . El método objeto de la presente patente permite un desdoblamiento de tareas entre el vehículo base (1) y el al menos un vehículo huésped (2) que refuerza la eficiencia del conjunto cuando, como aquí se propone, se emplea para tareas en infraestructuras: el vehículo base consume menos energía, porque sus recorridos se limitan a trasladarse al punto de estacionamiento intermedio (6) y en su caso, a puntos de estacionamiento ulteriores (9) y porque un trabajo de gran exigencia energética, cual es el de procesamiento de datos, se realiza en el propio vehículo base (1) y cuando está estacionado. Al no procesar a bordo los datos que adquiere, el al menos un vehículo huésped (2) requerirá de un equipamiento sustancialmente menos complejo que el de un vehículo que hubiera de ser empleado en tales tareas sin el auxilio de un vehículo base (1) , lo que de por sí implica un ahorro de energía. Además, se puede emplear un vehículo huésped (2) de pequeño tamaño, lo que incrementa el ahorro energético y le dota de mayor capacidad de maniobra, característica especialmente ventajosa en tareas relacionadas con infraestructuras. En un segundo aspecto, la invención tiene por objeto un sistema de vehículos no tripulados, según se define en la reivindicación 11. Otros modos de realización preferente se definen en las reivindicaciones dependientes. Los vehículos no tripulados mediante los cuales puede practicarse esta invención ueden ser de cualquier tipo, por ejemplo, de desplazamiento terrestre (conocidos como UGV, acrónimo de Unmanned Ground Vehicle o vehículo terrestre no tripulado) , acuático (ROUV o ROV, Remotedly Operated Underwater Vehicle o vehículo subacuático operado remotamente) , o aéreo (UAV, Unmanned Aerial Vehicle o vehículo aéreo no tripulado, comúnmente conocidos como drones) . El sistema de vehículos no tripulados está configurado para ejecutar las etapas del método de realización de tareas que es objeto de esta patente. El sistema comprende un vehículo base (1) y al menos un vehículo huésped (2) . Pueden emplearse distintos tipos de vehículos para configurar el conjunto, por ejemplo, el vehículo base (1) puede ser un UAV que aloje uno o varios vehículos de desplazamiento terrestre; y además uno o varios UAV. Preferentemente, tanto el vehículo base (1) como el al menos un vehículo huésped (2) son vehículos aéreos no tripulados. El vehículo base (1) comprende al menos una zona de alojamiento de al menos un vehículo huésped (2) . En un modo de realización, el vehículo base (1) comprende varias zonas de alojamiento (13) para sendos vehículos huéspedes (2) . En un modo de realización, en el vehículo base (1) se disponen medios (16) para la sujeción del al menos un vehículo huésped (2) . El vehículo base (1) comprende medios de recarga (14, 15) de su batería (17) y medios (18) para recargar la batería del al menos un vehículo huésped (2) . El vehículo base (1) está configurado para desplazarse (5) a un primer punto de estacionamiento intermedio (6) ubicado en una infraestructura, donde queda estacionado temporalmente, por ejemplo, en una torre de un tendido de alta tensión, una torreta de vigilancia fronteriza o contra incendios, o en la góndola de una turbina eólica. Para alcanzar el primer punto de estacionamiento intermedio (6) , el vehículo base (1) puede partir de cualquier punto, tal como una base fija (lo que, en el caso de aeronaves no tripuladas, se conoce como nido) , desde donde realizaría un vuelo autónomo preprogramado hasta el primer punto de estacionamiento intermedio (6) y en su caso, de ahí hasta ulteriores puntos de estacionamiento intermedio (9) . En un modo de ealización, la base fija (4) está situada en una infraestructura, por ejemplo, en la góndola de un aerogenerador o en un poste de una línea de alta tensión, desde donde el vehículo base (1) se desplazaría hasta el primer punto de estacionamiento intermedio (6) , que estaría localizado en otro aerogenerador del mismo parque eólico (y en su caso hasta un segundo punto de estacionamiento intermedio (9) en otro aerogenerador, y así sucesivamente) ; o en otro poste de la línea eléctrica. Asimismo, el vehículo base (1) puede partir desde un punto sustancialmente localizado en la proximidad de la infraestructura, por ejemplo, cuando haya sido trasladado hasta ese punto por un operador que lo vaya a pilotar hasta el primer punto de estacionamiento intermedio (6) o sucesivos (9) . El vehículo base (1) y el al menos un vehículo huésped (2) están configurados para comunicarse entre sí. En un ejemplo de realización, el propio vehículo base (1) puede llevar a bordo equipamiento para la adquisición de datos, de modo que realice tareas de este tipo durante su desplazamiento al primer punto de estacionamiento intermedio (6) y en su caso, a ulteriores puntos de estacionamiento intermedio (9) . En un modo de realización, el sistema comprende una estación de control (3) configurada para comunicarse con el vehículo base (1) , en cuyo caso el vehículo base (1) estará configurado para comunicarse con la estación de control (3) . La estación de control (3) comprende un sistema de computación en el cual se aloja un conjunto de software que contiene un sistema operativo y un programa configurado para ejecutar las etapas del método objeto de esta patente en uno de sus modos de realización, en que el método se ejecuta bajo control de un sistema de computación. BREVE DESCRIPCIÓN DE LOS DIBUJOS Para complementar la descripción se acompaña un juego de dibujos, que con carácter ilustrativo y no limitativo representan lo siguiente: Figura 1.- Esquema del método de realización de tareas en infraestructuras, en un modo de realización preferente en el que la infraestructura es una turbina eólica y el método se pone en práctica mediante aeronaves no tripuladas. Figura 2.- vehículos no tripulados base y huéspedes en un modo de realización en que dichos vehículos son aeronaves multirrotor. Figura 3.- Vista en corte de sección vertical de una parte de una aeronave base y de una aeronave huésped. REALIZACIÓN PREFERENTE DE LA INVENCIÓN En un primer aspecto, la presente invención tiene por objeto un método para la realización de tareas en infraestructuras. En un modo de realización preferente, que se ilustra en la Fig. 1, las tareas en infraestructuras son realizadas por un sistema que comprende un vehículo no tripulado base (1) y tres vehículos no tripulados que se alojan en el vehículo base (1) , por lo que se denominan vehículos huéspedes (2) . En todos los modos de realización preferente del método descritos en esta patente se asume que el método se realiza por esta pluralidad de tres vehículos huéspedes (2) , no siendo este número más que a título ejemplificativo, pudiendo el método ejecutarse igual con otro número distinto, con tal de que se disponga de al menos un vehículo huésped (2) . En este modo de realización preferente, tanto los vehículos base (1) como huéspedes (2) son aeronaves no tripuladas del tipo multirrotor. En el modo de realización ilustrado en la Fig. 1, las infraestructuras sobre la que se realizan las tareas son las turbinas de un parque de generación de energía eólica. Las tareas que normalmente se realizan en este tipo de infraestructuras están relacionadas con su inspección, con el fin de detectar defectos tales como grietas en las palas. Por tanto, quedan comprendidas en el concepto de tareas, tal y como se definen en esta patente, los desplazamientos o rutas (5) del vehículo base (1) hasta un primer punto de estacionamiento intermedio (6) , sus rutas (8) a puntos de estacionamiento ulteriores (9) , los desplazamientos o rutas de los vehículos huéspedes (2) a lo largo de la infraestructura (en este caso, normalmente a lo largo de las palas de los aerogeneradores) , la adquisición de datos por los vehículos huéspedes (2) o, en su caso, por el vehículo base (1) y el procesamiento de dichos datos por el vehículo base (1) . En el modo de realización preferido, mostrado en la misma Fig. 1, la aeronave base (1) está estacionada permanentemente en un punto fijo (nido) (4) ubicado en una góndola de uno de los aerogeneradores del parque eólico. Para fines de mantenimiento u otros, la aeronave (1) puede ser dirigida cuando se desee hacia la base del aerogenerador u otro punto donde el operador responsable pueda tomar posesión de ella. En un modo de realización, el método ilustrado en la Fig. 1 se implementa bajo el control de un dispositivo informático configurado con instrucciones ejecutables y localizado en una estación de control (3) , la cual puede estar ubicada en una localización remota con respecto a los vehículos (1, 2) que realizan las tareas. Partiendo de que el programa de mantenimiento de las turbinas establece la realización de tareas de inspección a intervalos de tiempo determinados, la primera etapa del método, conforme al modo de realización que se propone, comprende programar sendas tareas a realizar por el al menos un vehículo huésped (2) . Estas tareas pueden consistir, en un modo de realización, en una ruta que cada una de las tres aeronaves huéspedes (2) deberá realizar a lo largo de sendas palas de la turbina y en tareas de adquisición de datos (captación de imágenes fotográficas, de vídeo o LIDAR) durante las rutas. Asimismo, cuando el vuelo que vaya a realizar el vehículo base (1) sea en modo autónomo, su ruta constituirá una tarea que deberá ser programada, constituyendo este paso una subetapa de la primera etapa del método. Las tareas son programadas por el operador a cargo de los vehículos (1, 2) . Estas programaciones pueden quedar alojadas en una unidad de memoria ubicada en el dispositivo informático de la estación de control (3) , o en un servidor en la nube, de acceso remoto desde la estación de control (3) , siendo en ambos casos transmitidas (7) (vía WiFi o radio) preferentemente a la aeronave base (1) . Asimismo, las programaciones pueden quedar alojadas desde un primer momento en el microcontrolador de la aeronave base (1) , de donde las tareas correspondientes a las aeronaves huéspedes (2) se transmitirían a estas, preferentemente vía radio. En otro modo de realización, las programaciones concernientes a los vehículos huéspedes (2) pueden desde un primer momento alojarse en sus respectivos microcontroladores. En un modo de realización, las rutas están definidas por una secuencia de puntos espaciales de posicionamiento, conocidos en la técnica como waypoints, los cuales onsisten en un conjunto de coordenadas que identifican un punto específico en el espacio mediante las tres dimensiones (longitud, latitud, altitud) . La programación del itinerario de una aeronave no tripulada puede realizarse de distintas maneras conocidas por el experto en la materia. La realización de tareas incluye la adquisición de datos, por ejemplo, captación de imágenes mediante cámaras fotográficas, de vídeos o sensores LIDAR. Los puntos donde deban realizarse tareas de adquisición de datos pueden estar asociadas a los waypoints que definen las rutas de las aeronaves (1, 2) . Una segunda etapa del método reivindicado consiste en que el UAV base (1) , llevando a bordo a los tres UAVs huéspedes (2) , se desplaza (5) a un primer punto de estacionamiento (6) ubicado en una infraestructura. En el modo de realización ilustrado en la Fig. 1, el punto de partida (4) para dicho desplazamiento (5) es un nido permanentemente ubicado en una góndola de una turbina eólica de un parque de aerogeneradores. Y el primer punto de estacionamiento intermedio (6) está ubicado en una góndola de otra turbina eólica del mismo parque eólico. El vuelo hacia el primer punto de estacionamiento (6) puede ser ejecutado bajo control de un piloto humano desplazado hasta la proximidad del aerogenerador, o puede tratarse de un vuelo en modo autónomo. Una tercera etapa se ejecuta cuando los vehículos huéspedes (2) parten del vehículo base (1) para ejecutar las tareas programadas. En un modo de realización, la orden de partir es impartida por el microcontrolador del vehículo base (1) . En este mismo momento el microcontrolador del vehículo base (1) transmitirá vía radio su correspondiente ruta a cada una de las aeronaves huéspedes (2) . En otra posibilidad, las aeronaves huéspedes (2) pueden llevar programadas sus tareas en sus respectivos microcontroladores, por lo que no será necesario que el vehículo base (1) se las transmita en este momento. En una cuarta etapa, los vehículos huéspedes (2) regresan al vehículo base (1) . El vehículo base (1) , siguiendo las órdenes del piloto humano, de su microcontrolador o de la estación de control (3) , puede entonces regresar al punto de partida (4) ; o bien, en otro modo de realización, puede desplazarse (8) hasta un segundo punto de stacionamiento (9) , que se localizaría, en este modo de realización, en una turbina distinta, sobre la cual los vehículos huéspedes (2) realizarían las correspondientes tareas programadas conforme a la primera etapa del método. Como se ha mencionado, las tareas de los vehículos huéspedes (2) incluyen la adquisición de datos. En un modo de realización, el método incluye la etapa adicional de que dichos UAVs huéspedes (2) transmitan los datos al UAV base (1) . Según distintos modos de realización, esta transmisión puede tener lugar en tiempo real, o ejecutarse mediante volcado de datos vía radio una vez las aeronaves huéspedes (2) han regresado a la aeronave base (1) . En un modo de realización, la aeronave base (1) procesa los datos que le han transmitido las aeronaves huéspedes (2) . Cuando los datos se le van transmitiendo en tiempo real, el resultado del procesamiento puede ser la emisión de órdenes de acciones dirigidas a los vehículos huéspedes (2) que correspondan, con el fin de que estos realicen determinadas tareas. Por ejemplo, si de los datos procesados por las aeronaves huéspedes (2) resulta la presencia de lo que pudiera ser una grieta en la pala, la orden de acción puede ser la de tomar datos con una mayor proximidad. De este modo, la tarea inicialmente programada para el vehículo huésped (2) de que se trate puede verse modificada durante su realización. Asimismo, en un modo de realización, el procesamiento por el vehículo base (1) de la información recibida de los vehículos huéspedes (2) (independientemente de que la haya recibido en tiempo real o por volcado posterior) resulta en el envío (10) a la estación de control (3) de un archivo codificado, en el cual se contiene la información relativa a los elementos dañados que hayan podido detectarse en la infraestructura. De este modo, se evita tener que enviar a la estación de control (3) todos los datos adquiridos por los vehículos huéspedes (2) durante la realización de sus tareas, lo que supondría un ingente volumen de información, sustituyéndolos únicamente por la información relevante. En un segundo aspecto, la presente invención tiene por objeto un sistema de vehículos no tripulados. El sistema se caracteriza porque está configurado para ejecutar las etapas del método de realización de tareas que es objeto de esta patente. El sistema comprende un vehículo base (1) y al menos un vehículo huésped (2) . En un modo de realización preferente, mostrado en la Fig.2, los vehículos mediante los cuales se implementa la invención son vehículos aéreos no tripulados, en concreto del tipo multirrotor, esto es, de los que comprenden varios rotores asociados a sendos motores de propulsión. Este tipo de configuración permite aterrizajes y despegues verticales y el vuelo estacionario, por lo que estos drones son los más aptos para la realización del tipo de tareas que ejemplificativamente se describen en esta patente. La aeronave base (1) representada en la Fig. 2 comprende una plataforma (11) de la que sobresalen cuatro cuerpos de forma circular (12) , en cada uno de los cuales se ubica un rotor de propulsión, asociado a su correspondiente motor. La plataforma (11) está operativamente acoplada a un dispositivo de procesamiento informático, que comprende un microcontrolador estándar, el cual gestiona el funcionamiento de los motores y rotores asociados. El microcontrolador además integra un dispositivo de comunicaciones, de tipo receptor de radio o de tipo router con tarjeta SIM para facilitar las comunicaciones en baja latencia. La configuración mecánica básica de la aeronave base (1) no varía con respecto a los existentes en el sector. El experto la configurará con unos u otros dispositivos de navegación y comunicación según vaya a ser pilotada presencial o remotamente, o a realizar un vuelo autónomo; o según si el sistema se ha configurado o no con una estación de control (3) con la que se comunicará el UAV base (1) . Más específicamente, el UAV base (1) estará equipado con los dispositivos de procesamiento informático que el experto entienda necesarios en función de que el UAV base (1) vaya o no a recibir datos de los vehículos huéspedes (2) , y de si los va a recibir en tiempo real o por volcado y si los va a procesar a bordo. En un ejemplo de realización, el microcontrolador está conectado a distintos dispositivos periféricos: por un lado, los sensores de ubicación espacio-temporal de la aeronave base (1) conocidos en la técnica: giróscopo, acelerómetro, barómetro, magnetómetro, un sistema de posicionamiento por satélite capaz de conectarse a varias redes satélites, como GPS, GLONASS, BeiDou o GALILEO y un sistema de posicionamiento de alta precisión, por ejemplo, un sistema del tipo RTK (Real-Time Kinematics) . Por otro lado, dispositivos periféricos (entre otros, cámaras fotográficas o de vídeo, cámaras de espectro térmico por infrarrojos o sensores LIDAR de barrido) con una finalidad de detección de obstáculos y adicionalmente de detección de elementos sobre los que ealizar adquisición de datos, en relación con el modo de realización conforme al cual el propio vehículo base (1) realiza tareas de adquisición de datos, de manera complementaria a las tareas de la misma índole efectuadas por el al menos un vehículo huésped. En la plataforma (11) de la aeronave base (1) se disponen tres concavidades de forma cilíndrica (13) que sirven de zonas de alojamiento para sendas aeronaves huéspedes (2) . Las concavidades (13) son de una altura ligeramente mayor que la de las aeronaves huéspedes (2) , de modo que estas quedan protegidas por los lados de las concavidades (13) y a salvo del viento durante el vuelo de la aeronave base (1) . En un modo de realización, la aeronave base (1) comprende medios (16) para la sujeción de las aeronaves huéspedes (2) , como muestra la Fig. 3. El UAV base (1) comprende además medios de recarga de su batería. En el ejemplo de la Fig. 2, los medios de recarga consisten en un dispositivo cruciforme (14) cuyos brazos emergen entre los cuerpos circulares (12) y sobre cuya cara superior se disponen células fotovoltaicas (15) , operativamente conectadas con la batería (17, mostrada en Fig. 3) del vehículo base (1) . Alternativamente a los medios de recarga descritos, cuando el vehículo base (1) tenga su punto de partida (4) o su primer punto de estacionamiento intermedio (6) o un punto de estacionamiento ulterior (9) en la góndola de un aerogenerador, se aprovecharía la corriente eléctrica disponible en el aerogenerador para alimentar a la aeronave base (1) . En un modo de realización, se emplearía un dispositivo de recarga inalámbrica, existente en el estado de la técnica. En concreto, la aeronave base (1) llevaría adosada a la cara inferior de su cuerpo central una placa, que al aterrizar quedaría en la proximidad de una placa de carga dispuesta en la superficie superior de la góndola. El vehículo base (1) está configurado para desplazarse (5) desde su punto de partida (4) a un primer punto de estacionamiento (6) ubicado en una infraestructura, por ejemplo, en una torre de un tendido de alta tensión, una torreta de vigilancia fronteriza o contra incendios, o en la góndola de una turbina eólica. Las aeronaves huéspedes (2) son asimismo del tipo multirrotor, pudiendo escogerse de entre las disponibles en el mercado. Se las equipará con unos u otros dispositivos de avegación, de comunicación y de adquisición de datos según sea la índole de la tarea asignada, siendo esta una operación conocida por el experto en la materia. Estas aeronaves tienen la ventaja de que, al poder ser de pequeño tamaño, gastan menos energía y tienen más agilidad y capacidad de aproximarse a los distintos elementos de la infraestructura. El vehículo base (1) y los vehículos huéspedes (2) están configurados para comunicarse entre sí. Dichas comunicaciones pueden ser vía WiFi o por redes inalámbricas de área personal (WPAN) con arreglo al estándar Bluetooth® u otros sistemas de comunicación radio. En un modo de realización, el sistema comprende una estación de control (3) configurada para comunicarse con el vehículo principal (1) , en cuyo caso este vehículo (1) estará a su vez configurado para comunicarse con la estación de control (3) . En un ejemplo de realización, esta comunicación bidireccional se realiza en tiempo real mediante un protocolo de comunicación de baja latencia, por ejemplo, un protocolo de comunicación 5G. La estación de control (3) comprende un sistema de computación en el cual se aloja un conjunto de software que contiene un sistema operativo y un programa configurado para ejecutar las etapas del método, en el modo de realización preferido en que el método se ejecuta bajo control de un sistema de computación. En un ejemplo de realización, la estación de control (3) comprende los siguientes componentes: un sistema de computación, el cual comprende al menos un circuito que integra procesadores multinúcleo, una placa base, unidades de memoria RAM, medios de almacenamiento, una tarjeta gráfica configurada para procesar gran volumen de información en forma de imágenes; fuente de alimentación, medios de refrigeración y tarjeta de red y de comunicaciones en formato de baja latencia, como por ejemplo un sistema basado en comunicación tipo router con tarjeta SIM. En experto en la materia, en función de las necesidades previsibles, podrá configurar la estación de control (3) con equipamientos de más o menos capacidad de entre los disponibles en el estado de la técnica. En un modo de realización, la aeronave base (1) comprende un sistema de procesado computación en tiempo real que le permita analizar las imágenes y datos transmitidos en tiempo real por las aeronaves huéspedes (2) , mediante recursos de inteligencia artificial, por ejemplo, de visión computerizada y análisis de nubes de puntos LIDAR y fotogramétricas, con el fin de implementar procesos de detectar/evitar/actuar transmisibles en tiempo real a las aeronaves huéspedes (2) y con el fin de detectar y reportar a la estación de control (3) de manera autónoma aquellos elementos de la infraestructura que se encuentran dañados, ahorrando el envío de las imágenes de toda la infraestructura y optimizando así el tamaño de los paquetes de información que se envíen. La Fig. 3 es una vista en sección vertical de una porción de una aeronave base (1) y de una aeronave huésped (2) . En este dibujo se muestran los medios dispuestos en la aeronave base (1) para la sujeción de la aeronave huésped (2) . En el fondo de cada una de las concavidades de alojamiento (13) de la aeronave base (1) se disponen dos pinzas (16) , que se cierran sobre las patas de la aeronave huésped (2) . Las pinzas (16) están operativamente conectadas a sendos sensores y a respectivos servomotores de accionamiento. Cuando la aeronave base (1) transmite a la aeronave huésped (2) la orden de despegue, el microcontrolador de la aeronave base (1) acciona los servomotores, que abren las pinzas (16) . Cuando la aeronave huésped (16) se posa en su alojamiento (13) , el contacto es detectado por los sensores, que causan el accionamiento de los servomotores, cerrándose las pinzas (16) y sujetando a la aeronave huésped (2) en su concavidad (13) . Este tipo de sistema de cierre mediante pinzas (16) , sensores y servomotores es conocido en el estado de la técnica. La Fig. 3 ejemplifica asimismo los medios de recarga de la batería del vehículo huésped. La batería (17) del vehículo base (1) está conectada con un puerto de conexión (18) , que emerge de la base de la concavidad (13) y la cual se inserta en un puerto de alimentación de la aeronave huésped, cuando esta queda alojada en dicha concavidad (13) .
Publicaciones:
ES2953760 (15/11/2023) - A1 Solicitud de patente con informe sobre el estado de la técnica
Eventos:
En fecha 25/03/2022 se realizó Registro Instancia de Solicitud
En fecha 25/03/2022 se realizó Admisión a Trámite
En fecha 25/03/2022 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 01/06/2022 se realizó Superado examen de oficio
En fecha 15/09/2022 se realizó Realizado IET
En fecha 20/09/2022 se realizó 1109P_Comunicación Traslado del IET
En fecha 15/11/2023 se realizó Publicación Solicitud
En fecha 15/11/2023 se realizó Publicación Folleto Solicitud con IET (A1)
En fecha 01/03/2024 se realizó Validación petición y/o pago de examen sustantivo no conforme
En fecha 01/03/2024 se realizó Retirada
En fecha 01/03/2024 se realizó 1108P_Notificación retirada solicitud por no petición y/o pago de examen sustantivo
En fecha 07/03/2024 se realizó Publicación retirada solicitud por no petición y/o pago de examen sustantivo
Pagos:
25/03/2022 - Pago Tasas IET
Fuente de la información
Parte de la información aquí publicada es pública puesto que ha sido obtenida de la Oficina de Propiedad Industrial de los diferentes países el 27/04/2024 y por lo tanto puede ser que la información no esté actualizada.Parte de la información aquí mostrada ha sido calculada por nuestro sistema informático y puede no ser veraz.
Privacidad
Si considera que al información aquí publicada afecta a su privacidad y desea que eliminemos la información aquí publicada envíe un email a info@patentes-y-marcas.com o rellene el formulario que encontrará aquí.Información sobre el registro de patente nacional por MÉTODO PARA LA REALIZACIÓN DE TAREAS EN INFRAESTRUCTURAS Y SISTEMA DE VEHÍCULOS NO TRIPULADOS con el número P202230270
El registro de patente nacional por MÉTODO PARA LA REALIZACIÓN DE TAREAS EN INFRAESTRUCTURAS Y SISTEMA DE VEHÍCULOS NO TRIPULADOS con el número P202230270 fue solicitada el 25/03/2022. Se trata de un registro en España por lo que este registro no ofrece protección en el resto de países. El registro MÉTODO PARA LA REALIZACIÓN DE TAREAS EN INFRAESTRUCTURAS Y SISTEMA DE VEHÍCULOS NO TRIPULADOS con el número P202230270 fue solicitada por ARBOREA INTELLBIRD S.L.. El registro [modality] por MÉTODO PARA LA REALIZACIÓN DE TAREAS EN INFRAESTRUCTURAS Y SISTEMA DE VEHÍCULOS NO TRIPULADOS con el número P202230270 está clasificado como G05D 1/10,B64C 39/02,G08G 5/00 según la clasificación internacional de patentes.
Otras invenciones solicitadas por ARBOREA INTELLBIRD S.L.
Es posible conocer todas las invenciones solicitadas por ARBOREA INTELLBIRD S.L. entre las que se encuentra el registro de patente nacional por MÉTODO PARA LA REALIZACIÓN DE TAREAS EN INFRAESTRUCTURAS Y SISTEMA DE VEHÍCULOS NO TRIPULADOS con el número P202230270. Si se desean conocer más invenciones solicitadas por ARBOREA INTELLBIRD S.L. clicar aquí.Otras invenciones solicitadas en la clasificación internacional de patentes G05D 1/10,B64C 39/02,G08G 5/00.
Es posible conocer invenciones similares al campo de la técnica se refiere. El registro de patente nacional por MÉTODO PARA LA REALIZACIÓN DE TAREAS EN INFRAESTRUCTURAS Y SISTEMA DE VEHÍCULOS NO TRIPULADOS con el número P202230270 está clasificado con la clasificación G05D 1/10,B64C 39/02,G08G 5/00 por lo que si se desea conocer más registros con la clasificación G05D 1/10,B64C 39/02,G08G 5/00 clicar aquí.Patentes en España
Es posible conocer todas las invenciones publicadas en España entre las que se encuentra el registro patente nacional por MÉTODO PARA LA REALIZACIÓN DE TAREAS EN INFRAESTRUCTURAS Y SISTEMA DE VEHÍCULOS NO TRIPULADOS. Nuestro portal www.patentes-y-marcas.com ofrece acceso a las publicaciones de patentes en España. Conocer las patentes registradas en un país es importante para saber las posibilidades de fabricar, vender o explotar una invención en España.Patentes registradas en la clase G
Es posible conocer todas las patentes registradas en la clase G (FISICA) entre las que se encuentra la patente MÉTODO PARA LA REALIZACIÓN DE TAREAS EN INFRAESTRUCTURAS Y SISTEMA DE VEHÍCULOS NO TRIPULADOS con el número P202230270. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase G05
Es posible conocer todas las patentes registradas en la clase G05 (CONTROL; REGULACION) entre las que se encuentra la patente MÉTODO PARA LA REALIZACIÓN DE TAREAS EN INFRAESTRUCTURAS Y SISTEMA DE VEHÍCULOS NO TRIPULADOS con el número P202230270. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase G05D
Es posible conocer todas las patentes registradas en la clase G05D (SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS) entre las que se encuentra la patente MÉTODO PARA LA REALIZACIÓN DE TAREAS EN INFRAESTRUCTURAS Y SISTEMA DE VEHÍCULOS NO TRIPULADOS con el número P202230270. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase B
Es posible conocer todas las patentes registradas en la clase B (TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTE ) entre las que se encuentra la patente MÉTODO PARA LA REALIZACIÓN DE TAREAS EN INFRAESTRUCTURAS Y SISTEMA DE VEHÍCULOS NO TRIPULADOS con el número P202230270. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase B64
Es posible conocer todas las patentes registradas en la clase B64 (AERONAVES; AVIACION; ASTRONAUTICA) entre las que se encuentra la patente MÉTODO PARA LA REALIZACIÓN DE TAREAS EN INFRAESTRUCTURAS Y SISTEMA DE VEHÍCULOS NO TRIPULADOS con el número P202230270. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase B64C
Es posible conocer todas las patentes registradas en la clase B64C (AEROPLANOS; HELICOPTEROS ) entre las que se encuentra la patente MÉTODO PARA LA REALIZACIÓN DE TAREAS EN INFRAESTRUCTURAS Y SISTEMA DE VEHÍCULOS NO TRIPULADOS con el número P202230270. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase G08
Es posible conocer todas las patentes registradas en la clase G08 (SEÑALIZACION) entre las que se encuentra la patente MÉTODO PARA LA REALIZACIÓN DE TAREAS EN INFRAESTRUCTURAS Y SISTEMA DE VEHÍCULOS NO TRIPULADOS con el número P202230270. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase G08G
Es posible conocer todas las patentes registradas en la clase G08G (SISTEMAS DE CONTROL DE TRÁFICO) entre las que se encuentra la patente MÉTODO PARA LA REALIZACIÓN DE TAREAS EN INFRAESTRUCTURAS Y SISTEMA DE VEHÍCULOS NO TRIPULADOS con el número P202230270. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.
¿Tienes alguna duda?
Escribe tu consulta y te responderemos rápida y gratuitamente.

Otras patentes similares
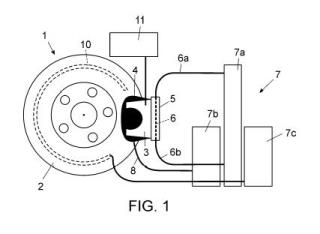
 P202230163
P202230163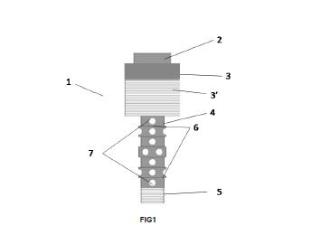 P202230282
P202230282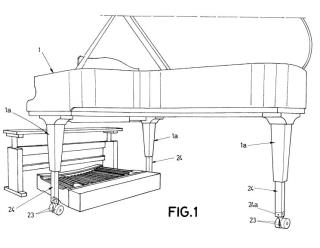
Profesionales Recomendados
Barcelona
933182440
España
933182440
España

Barcelona
+34 93 362 16 97
España
+34 93 362 16 97
España

Barcelona
932 593 600
España
932 593 600
España







