


- Home /
- Publicaciones de patentes /
- CARRO PEATONAL DOTADO DE ASISTENCIA ELÉCTRICA Y SISTEMA DE CONTROL POR AUTO-EQUILIBRIO
Patente nacional por "CARRO PEATONAL DOTADO DE ASISTENCIA ELÉCTRICA Y SISTEMA DE CONTROL POR AUTO-EQUILIBRIO"
Este registro ha sido solicitado por
GENIUS EMOBILITY SYSTEMS SL
Contacto
- Estado: Vigente
- País:
- España
- Fecha solicitud:
- 19/06/2022
- Número solicitud:
-
P202230541
- Número publicación:
-
ES2957718
- Fecha de concesión:
-
- Inventores:
-
Persona física
- Datos del titular:
-
GENIUS EMOBILITY SYSTEMS SL
- Datos del representante:
-
- Clasificación Internacional de Patentes:
- B62D 51/04,B62K 11/00
- Clasificación Internacional de Patentes de la publicación:
- B62D 51/04,B62K 11/00
- Fecha de vencimiento:
Quiero registrar una patente

Reivindicaciones:
+ ES-2957718_A11. Carro peatonal dotado de asistencia eléctrica y sistema de control por auto-equilibrio, con electrónica y programación; que comprende un chasis (1) , ruedas motorizadas (2) rodando sobre un único eje de rodadura (200) del carro, y unos miembros de agarre manual (30) ; caracterizado por que dichos medios de agarre manual (30) no son solidarios al chasis (1) sino que están comprendidos en uno de los extremos de un miembro de control abatible (3) que en su otro extremo dispone de unos medios de anclaje articulado (31) que, de forma directa o indirecta, lo unen al chasis (1) definiendo un eje de abatimiento (310) transversal situado significativamente por encima del eje de giro (20) de las ruedas (2) sobre el que dicho miembro de control abatible (3) tiene libertad de giro. 2. Carro peatonal dotado de asistencia eléctrica y sistema de control por auto-equilibrio según reivindicación 1, donde dicho chasis (1) es simétrico respecto de un plano transversal que contiene a los ejes de giro (20) de las ruedas (2) , y dichos medios de anclaje articulado (31) se sitúan en dicho plano de simetría. 3. Carro peatonal dotado de asistencia eléctrica y sistema de control por auto-equilibrio según reivindicación 3, donde dicho eje de abatimiento (310) se sitúa a una altura del suelo entre 80 y 110 cm. 4. Carro peatonal dotado de asistencia eléctrica y sistema de control por auto-equilibrio según reivindicación 1, que dispone al menos un tope sensorizado (13) con función fin de carrera, que delimita el rango inferior de giro o abatimiento del miembro de control abatible (3) y que cuando es pulsado comunica al sistema de control un comando de freno y parada segura. 5. Carro peatonal dotado de asistencia eléctrica y sistema de control por auto-equilibrio según reivindicación 1, que dispone de un modo de operación llamado "modo sin conductor", que asegura que el carro pare si está en movimiento, y que permanezca parado, y que será el modo activo de uncionamiento siempre que un conductor no tenga sujetos los medios de agarre manual (30) . 6. Carro peatonal dotado de asistencia eléctrica y sistema de control por auto-equilibrio según reivindicación 5, que dispone un pulsador o botón de activación (301) situado junto a los medios de agarre manual (30) , que cuando es pulsado, la programación electrónica desbloquea el "modo sin conductor" y establece como referencia "cero" el valor del ángulo correspondiente a la inclinación del carro en ese momento, y desde ese instante, el control electrónico aplicará par motor en función tanto del ángulo de inclinación del carro respecto a dicha referencia "cero" como de su variación en el tiempo.
Los productos y servicios protegidos por este registro son:
B62D 51/04 - B62K 11/00
Descripciones:
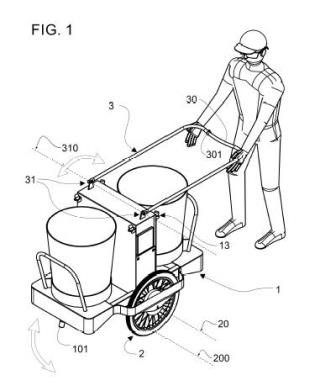
+ ES-2957718_A1 CARRO PEATONAL DOTADO DE ASISTENCIA ELÉCTRICA Y SISTEMA DE CONTROL POR AUTO-EQUILIBRIO La presente invención aplica a aquellos carros que ruedan apoyados sobre un único eje, y que están dotados de asistencia eléctrica con un sistema de control por auto-equilibrio, y en los que el conductor no va subido para ser transportado, sino que lo conduce al tiempo que camina junto a él manejándolo por medio de unos medios de agarre manual. ESTADO DE LA TÉCNICA Los vehículos con sistema de auto-equilibrio son muy populares, cabiendo destacar el original SEGWAY PT -US6827163B2- y los hoverboards -US8738278B2-. Su funcionamiento se basa en el principio del péndulo invertido, de manera que un vehículo motorizado que se mueve sobre un solo eje -en este caso dotado de 2 ruedas alineadas- sin apoyos exteriores, al inclinarse apartándose de una referencia inicial predominantemente vertical, se aplica par motor principalmente como respuesta al ángulo de cabeceo del vehículo y a su velocidad de inclinación, ejerciendo por tanto una reacción que tiende a enderezarlo. Sin embargo, ambos casos citados se corresponden con vehículos de movilidad personal, donde el conductor va subido para ser transportado. Esta tecnología también se está usando para robótica, de forma que el vehículo se mueve sobre un solo eje, equilibrado gracias al control electrónico del par motor en función de su ángulo y velocidad de inclinación. Éstos se conducen bien de forma autónoma o teledirigidos, como es el caso del NINEBOT LOOMO-WO2018113548A1-. Un problema que presenta esta tecnología es que, ante un eventual bache severo, badén o pequeño choque con un bordillo, se produzca un desequilibrio tan grande que los motores, aun habiendo alcanzado su pico máximo de par, no puedan contrarrestarlo, por lo que se produciría un accidente. En la presente invención se propone sin embargo un uso bien distinto de la tecnología de auto-equilibrio: como carro peatonal de carga. Al estar el equilibrio del carro asegurado no sólo por el par motor sino también por la sujeción del manillar del carro, la problemática anteriormente descrita no aplicaría. Muchos carros peatonales de carga sin asistencia eléctrica tienen un solo eje, por tanto, el conductor tiene que mantener el carro equilibrado a pulso. Sin embargo, esta configuración presenta una manejabilidad y rodadura excelentes en cualquier terreno. Por otro lado, los carros peatonales motorizados, suelen apoyarse en al menos una tercera rueda, habitualmente rueda loca, que entorpece su rodadura. Esta configuración presenta un inconveniente a nivel de control, pues acaba siendo estresante para el conductor adaptar la velocidad del carro a su propio ritmo de marcha, ya que cuando el carro no va tirando del conductor, lo va frenando en su caminar. Pues bien, la aplicación del auto-equilibrio a los carros peatonales resulta particularmente ventajosa: • La velocidad del carro auto-equilibrado siempre se corresponde con la del peatón que lo conduce agarrado a él, pues se adapta en todo momento: si el carro fuese por un instante más aprisa, las ruedas avanzarían más que el manillar, encabritándose y provocando una ralentización como respuesta motora; y si por el contrario avanzase más despacio que el conductor, el mayor avance del manillar haría cabecear al carro hacia delante de forma que el carro corregiría acelerando. • La rodadura y manejabilidad es la mejor posible, sin que suponga apenas ningún esfuerzo para el conductor pues no es él quien debe mantener el carro equilibrado ya que éste siempre encontrará el equilibrio, soportado entre el par motor y, en todo caso, la simple sujeción del manillar. Como ejemplos de carros peatonales de carga con auto-equilibrio cabe destacar US2004011573A1, del inventor del original Segway, que hace uso de n Segway PT, pero del revés, esto es, con el conductor a pie, agarrando el manillar desde el lado opuesto a la plataforma -que normalmente era el frontal del vehículo- usando dicha plataforma del vehículo como soporte de carga; y también EP3705101A1, que presenta una silla de ruedas o carro, funcionalmente muy similar al caso anterior. Sin embargo, presentan un importante primer problema a resolver: si las fuerzas realizadas por el conductor en el manillar fuesen tangenciales -tomando el eje de las ruedas como centro del giro de cabeceo-, la resultante sería un momento predecible de cabeceo o encabritado, y de esta forma, el control del auto-equilibrio respondería de la forma descrita anteriormente. El problema aparece cuando las fuerzas realizadas por el conductor tienen una componente normal, esto es, en dirección desde el manillar hacia el eje de las ruedas. En ese caso el sistema presenta una inestabilidad que puede alterar la intencionalidad de la acción de mando sobre el carro, por lo que, ante cualquier perturbación exterior, la resultante será un momento no predecible que puede ser de cabeceo o encabritado. Un ejemplo de ello es cuando el carro va marcha atrás: si el conductor se distrae y de repente intenta sujetar el carro para evitar que se le venga encima, la fuerza realizada por el conductor para retener el carro puede atravesar el eje de giro principal (eje de las ruedas) , y se puede resolver con un momento de cabeceo (caso favorable) , o un momento de encabritado (caso desfavorable) . En este último caso, se generaría un mayor empuje marcha atrás, atropellando al propio conductor. Un segundo problema a resolver aparece con los carros en los que su dimensión longitudinal es significativa, lo suficiente como para que la carga que se les va poniendo encima pueda producir un desplazamiento significativo del centro de masas. En tal caso, un desequilibrio grande de la carga es corregido con una inclinación significativa del carro, lo que provocaría que para manejar un carro así, a veces el manillar quedaría demasiado alto y otras demasiado bajo, lo que de por sí ya sería incómodo, pero es que además complicaría mucho la subida de pendientes en el primer caso, o la bajada en el segundo. Así, de hecho, estas invenciones, si es que han llegado al mercado, el inventor de la presente invención no ha logrado encontrar evidencias de ello. SUMARIO DE LA INVENCIÓN La presente invención aplica a carros dotados de asistencia eléctrica; que son peatonales, de modo que el conductor no va subido para ser transportado, sino que éste lo conduce al tiempo que camina manejándolo por medio de unos medios de agarre manual; y que ruedan apoyados sobre un único eje cuyas ruedas motorizadas responden a un sistema de control por auto-equilibrio, por lo que disponen de electrónica y programación. Conocido dicho "primer problema a resolver" -el que podría acabar en auto atropello-, se propone un carro peatonal con auto-equilibrio que incorpora un miembro de control abatible, con forma de asa, de forma que en uno de sus extremos comprende los medios de agarre manual o manillar y en su otro extremo dispone de medios de anclaje articulado que lo unen al carro, bien sea de forma directa al chasis, o a través de estructuras intermedias. Dicho miembro de control abatible pivota respecto a un eje transversal situado sobre las ruedas del carro y significativamente por encima de su eje de giro, esto es, a suficiente altura como para que un usuario medio al empujar o tirar del carro, agarrado del manillar, lo haga transmitiendo al carro fuerzas predominantemente horizontales, que de forma predominante inducirán momentos de cabeceo y encabritado -al empujar y al tirar- con lo que se evita cualquier riesgo de atropello por acción del auto-equilibrio, además de aportar empuje o tracción humana al empuje eléctrico, lo que puede ser de gran ayuda especialmente en caso de grandes pendientes o de grandes cargas en pendiente. Se comprueba además que esta invención, soluciona el segundo problema a resolver, puesto que la altura a la que el conductor lleve el manillar depende sólo de su comodidad y preferencias, y nunca de lo desequilibrada que esté dispuesta la carga en el carro. Dicho miembro de control abatible podrá disponer de suficiente grado de libertad en sus medios de anclaje articulado al carro como para adoptar una altura adecuada para usuarios muy altos y bajos. Así podrían ser regulables en altura. Dichos medios de anclaje articulado permitirán suficiente rango de abatimiento como para no hacer tope al subir o bajar cuestas pronunciadas, así como para poder mantener el carro equilibrado en reposo cuando la carga esté desequilibrada, ya que siempre que el conductor permanezca quieto, el carro también lo hará, pero adoptando un mayor o menor ángulo de cabeceo en función de cuán desequilibrado sea el reparto de la carga en ese momento. En cuanto al funcionamiento del carro, se establecen al menos dos modos de operación: el "modo conducción" y el "modo sin conductor". En el modo conducción, el conductor siempre ha de estar sujetando el manillar dentro de su rango de uso, y una vez activado dicho modo, por ejemplo, pulsando un pulsador o botón de activación, la electrónica del carro conservará un valor angular de cabeceo de referencia "cero" sobre la vertical, de forma que, si desde esa referencia cabecease bajando el morro, los motores ejercerían un par de avance, y viceversa. En cuanto el conductor haya soltado el manillar, es necesario asegurar que el carro no siga andando sólo, pues lo haría hasta chocar o encontrarse con alguna resistencia significativa, ya que cualquier desequilibrio en el reparto de la carga provocaría una tendencia a la inclinación hacia el lado más pesado y esa tendencia a la inclinación sería compensada con par motor y por tanto con el avance del carro en uno u otro sentido. De ello se ocupa el modo sin conductor, que se activaría en ese mismo instante. En una realización preferente, para el modo sin conductor, el carro dispondrá de una función "hombre muerto" de forma que, si el conductor soltase el manillar, por medio de uno o varios sensores correspondientes que reconocerían esa acción, se ejecutaría un comando que accionaría electrónicamente la controladora de los motores para frenar y parar el carro de orma segura dejándolo caer por balanceo hasta reposar sobre uno de sus extremos, y preferentemente vigilando que su velocidad siga siendo nula. En una realización particular de esta preferente, cuando el conductor soltase el manillar, el miembro de control abatible pivotaría cayendo por gravedad hasta un tope inferior, que mediante un correspondiente sensor con función "fin de carrera" accionaría electrónicamente la controladora para activar el modo sin conductor. En otra realización preferente del modo sin conductor, en el instante en que el conductor soltase el manillar, el carro activaría un programa de autoequilibrio con función de control de parada. Dicho programa de auto-equilibrio con función de control de parada calcula de forma automática una nueva referencia "cero", como valor de la medida angular sobre la vertical correspondiente al nuevo punto de equilibrio en que el carro alcance velocidad nula. Esto ocurre independientemente de cuán desequilibrada esté posicionada la carga en el carro, o de que éste se encuentre en una pendiente o en un terreno plano horizontal. Así el carro quedaría parado y en equilibrio sobre su eje de rodadura. De esta forma, en un suelo horizontal, el centro de masas del carro cargado quedaría posicionado justo por encima del eje de giro de las ruedas y la inclinación del carro se correspondería con la nueva referencia "cero"; y en pendiente, el carro permanecería inclinado hacia el lado de la pendiente positiva, y con valor de inclinación distinto al de referencia "cero" así que los motores estarían aplicando permanentemente el par equivalente a mantener el carro frenado en plena cuesta. Y si las condiciones de carga variasen, por ejemplo, porque se esté añadiendo más carga, puesto que se mantiene la condición de velocidad cero, el programa, que recalcula permanentemente, establecería una nueva referencia "cero" para seguir parado y estable. En tal caso, no podría dejarse reposar en el suelo sobre uno de sus extremos hasta que no entrase en funcionamiento otro modo de funcionamiento o de apagado que eventualmente tuviese programado por oftware, o dependiente de otros elementos de accionamiento electrónico, como un interruptor o un pulsador. DESCRIPCIÓN BREVE DE LAS FIGURAS • FIG-1 muestra una vista en perspectiva de un carro según la presente invención, en modo conducción. También muestra un conductor. • FIG-2 muestra una vista en perspectiva de un carro según la presente invención, en modo sin conductor, reposado en el suelo sobre uno de sus extremos. EXPOSICIÓN DETALLADA DE MODO PREFERENTE DE REALIZACIÓN La presente invención propone un carro dotado de asistencia eléctrica y sistema de control por auto-equilibrio -teniendo por tanto un único eje de rodadura (200) -, que comprende un chasis (1) , dos ruedas motorizadas (2) rodando sobre el único eje de rodadura (200) del carro, y unos medios de agarre manual (30) que no son solidarios al chasis (1) sino que están comprendidos en uno de los extremos de un miembro de control abatible (3) con forma de asa, que en su otro extremo dispone de unos medios de anclaje articulado (31) que lo unen al chasis (1.- aunque en este caso de forma indirecta por medio de un cajón unido a estructuralmente al chasis- definiendo un eje de abatimiento (310) transversal, situado significativamente por encima de los respectivos ejes de giro (20) de las ruedas (2) , sobre el que dicho miembro de control abatible (3) tiene libertad de giro. En este caso preferente, su chasis (1) es simétrico respecto de un plano transversal que contiene a los ejes de giro (20) de las ruedas (2) para lograr un óptimo reparto de pesos, y dichos medios de anclaje articulado (31) se sitúan en dicho plano de simetría y a una altura próxima a la de la cadera de un usuario medio, por ejemplo a una altura del suelo entre 80 y 110 cm, definiendo un eje de abatimiento (310) sobre el que dicho miembro de control batible (3) tiene libertad de giro o pivote, dentro de un rango de uso delimitado por al menos un tope sensorizado (13) . En esta realización preferente, tanto el encendido del carro como cualquier eventual contacto del miembro de control abatible (3) con el tope sensorizado (13) , activa la función "hombre muerto", asegurando que las ruedas motorizadas (2) tengan velocidad cero respecto del chasis y que el carro está en modo sin conductor. En este modo, siempre que no estemos sujetando el carro manualmente, una de sus patas (101, 102) estará sirviendo de apoyo e incluso de taco de freno. En esta realización preferente, para activar el modo de conducción, primero el conductor habrá de sujetar el miembro de control abatible (3) por los miembros de agarre manual (30) y tirando o empujando de ellos, hacer bascular el carro sobre sus ruedas (2) hasta llevarlo a una inclinación cercana al equilibrio que le resulte cómoda mantener. Entones pulsando un botón de activación (301) , preferentemente situado junto a los medios de agarre manual (30) , la programación electrónica desbloqueará el "modo sin conductor" y establecerá como nueva referencia "cero" el valor del ángulo correspondiente a la inclinación en ese momento, y desde ese instante, el control electrónico hará aplicar par motor en función del ángulo de inclinación del carro respecto a dicha referencia "cero" así como de su variación en el tiempo. Para pasar de nuevo al modo de no conductor, pueden disponerse varias opciones: una es sin duda la de seguridad, que se activaría al soltar el manillar sin más, pero además podría también activarse este modo por ejemplo pulsando otro botón, con un sensor de presencia en la mano, o incluso que el mismo botón de activación (301) también cumpla esa función. OTRAS FORMAS DE REALIZACIÓN Respecto de la realización anteriormente descrita de la presente invención, otras modificaciones pueden emplearse sin apartarse del alcance de a presente invención como se define por las reivindicaciones adjuntas. Por ejemplo, que alguna de dichas articulaciones, o todas ellas, fueran materializadas por junturas flexibles... también el tamaño, la forma, la ubicación o la orientación de los diversos componentes se pueden variar. Los componentes que se muestran conectados directamente o en contacto entre sí pueden tener estructuras intermedias dispuestas entre ellos. Las funciones de un elemento pueden ser realizadas por dos, y viceversa. Por lo tanto, el alcance de la invención no debe estar limitada por la realización específica descrita, sino por las reivindicaciones adjuntas. La presente invención bien es aplicable a carros de carga, de servicios de limpieza u otro, o incluso carros más pequeños como carritos de la compra de uso personal. Por tanto, es aplicable a todo tipo de trolleys, carritos, carros y chasis rodantes en general.
Publicaciones:
ES2957718 (24/01/2024) - A1 Solicitud de patente con informe sobre el estado de la técnica
Eventos:
En fecha 19/06/2022 se realizó Registro Instancia de Solicitud
En fecha 20/06/2022 se realizó Admisión a Trámite
En fecha 20/06/2022 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 01/07/2022 se realizó Concesión solicitud de reducción de tasas
En fecha 07/07/2022 se realizó Publicación concesión reducción de tasas
En fecha 15/07/2022 se realizó Superado examen de oficio
En fecha 14/11/2022 se realizó Realizado IET
En fecha 18/11/2022 se realizó 1109P_Comunicación Traslado del IET
En fecha 24/01/2024 se realizó Publicación Solicitud
En fecha 24/01/2024 se realizó Publicación Folleto Solicitud con IET (A1)
Pagos:
18/06/2022 - Pago Tasas IET
+ ES-2957718_A11. Carro peatonal dotado de asistencia eléctrica y sistema de control por auto-equilibrio, con electrónica y programación; que comprende un chasis (1) , ruedas motorizadas (2) rodando sobre un único eje de rodadura (200) del carro, y unos miembros de agarre manual (30) ; caracterizado por que dichos medios de agarre manual (30) no son solidarios al chasis (1) sino que están comprendidos en uno de los extremos de un miembro de control abatible (3) que en su otro extremo dispone de unos medios de anclaje articulado (31) que, de forma directa o indirecta, lo unen al chasis (1) definiendo un eje de abatimiento (310) transversal situado significativamente por encima del eje de giro (20) de las ruedas (2) sobre el que dicho miembro de control abatible (3) tiene libertad de giro. 2. Carro peatonal dotado de asistencia eléctrica y sistema de control por auto-equilibrio según reivindicación 1, donde dicho chasis (1) es simétrico respecto de un plano transversal que contiene a los ejes de giro (20) de las ruedas (2) , y dichos medios de anclaje articulado (31) se sitúan en dicho plano de simetría. 3. Carro peatonal dotado de asistencia eléctrica y sistema de control por auto-equilibrio según reivindicación 3, donde dicho eje de abatimiento (310) se sitúa a una altura del suelo entre 80 y 110 cm. 4. Carro peatonal dotado de asistencia eléctrica y sistema de control por auto-equilibrio según reivindicación 1, que dispone al menos un tope sensorizado (13) con función fin de carrera, que delimita el rango inferior de giro o abatimiento del miembro de control abatible (3) y que cuando es pulsado comunica al sistema de control un comando de freno y parada segura. 5. Carro peatonal dotado de asistencia eléctrica y sistema de control por auto-equilibrio según reivindicación 1, que dispone de un modo de operación llamado "modo sin conductor", que asegura que el carro pare si está en movimiento, y que permanezca parado, y que será el modo activo de uncionamiento siempre que un conductor no tenga sujetos los medios de agarre manual (30) . 6. Carro peatonal dotado de asistencia eléctrica y sistema de control por auto-equilibrio según reivindicación 5, que dispone un pulsador o botón de activación (301) situado junto a los medios de agarre manual (30) , que cuando es pulsado, la programación electrónica desbloquea el "modo sin conductor" y establece como referencia "cero" el valor del ángulo correspondiente a la inclinación del carro en ese momento, y desde ese instante, el control electrónico aplicará par motor en función tanto del ángulo de inclinación del carro respecto a dicha referencia "cero" como de su variación en el tiempo.
Los productos y servicios protegidos por este registro son:
B62D 51/04 - B62K 11/00
Descripciones:
+ ES-2957718_A1 CARRO PEATONAL DOTADO DE ASISTENCIA ELÉCTRICA Y SISTEMA DE CONTROL POR AUTO-EQUILIBRIO La presente invención aplica a aquellos carros que ruedan apoyados sobre un único eje, y que están dotados de asistencia eléctrica con un sistema de control por auto-equilibrio, y en los que el conductor no va subido para ser transportado, sino que lo conduce al tiempo que camina junto a él manejándolo por medio de unos medios de agarre manual. ESTADO DE LA TÉCNICA Los vehículos con sistema de auto-equilibrio son muy populares, cabiendo destacar el original SEGWAY PT -US6827163B2- y los hoverboards -US8738278B2-. Su funcionamiento se basa en el principio del péndulo invertido, de manera que un vehículo motorizado que se mueve sobre un solo eje -en este caso dotado de 2 ruedas alineadas- sin apoyos exteriores, al inclinarse apartándose de una referencia inicial predominantemente vertical, se aplica par motor principalmente como respuesta al ángulo de cabeceo del vehículo y a su velocidad de inclinación, ejerciendo por tanto una reacción que tiende a enderezarlo. Sin embargo, ambos casos citados se corresponden con vehículos de movilidad personal, donde el conductor va subido para ser transportado. Esta tecnología también se está usando para robótica, de forma que el vehículo se mueve sobre un solo eje, equilibrado gracias al control electrónico del par motor en función de su ángulo y velocidad de inclinación. Éstos se conducen bien de forma autónoma o teledirigidos, como es el caso del NINEBOT LOOMO-WO2018113548A1-. Un problema que presenta esta tecnología es que, ante un eventual bache severo, badén o pequeño choque con un bordillo, se produzca un desequilibrio tan grande que los motores, aun habiendo alcanzado su pico máximo de par, no puedan contrarrestarlo, por lo que se produciría un accidente. En la presente invención se propone sin embargo un uso bien distinto de la tecnología de auto-equilibrio: como carro peatonal de carga. Al estar el equilibrio del carro asegurado no sólo por el par motor sino también por la sujeción del manillar del carro, la problemática anteriormente descrita no aplicaría. Muchos carros peatonales de carga sin asistencia eléctrica tienen un solo eje, por tanto, el conductor tiene que mantener el carro equilibrado a pulso. Sin embargo, esta configuración presenta una manejabilidad y rodadura excelentes en cualquier terreno. Por otro lado, los carros peatonales motorizados, suelen apoyarse en al menos una tercera rueda, habitualmente rueda loca, que entorpece su rodadura. Esta configuración presenta un inconveniente a nivel de control, pues acaba siendo estresante para el conductor adaptar la velocidad del carro a su propio ritmo de marcha, ya que cuando el carro no va tirando del conductor, lo va frenando en su caminar. Pues bien, la aplicación del auto-equilibrio a los carros peatonales resulta particularmente ventajosa: • La velocidad del carro auto-equilibrado siempre se corresponde con la del peatón que lo conduce agarrado a él, pues se adapta en todo momento: si el carro fuese por un instante más aprisa, las ruedas avanzarían más que el manillar, encabritándose y provocando una ralentización como respuesta motora; y si por el contrario avanzase más despacio que el conductor, el mayor avance del manillar haría cabecear al carro hacia delante de forma que el carro corregiría acelerando. • La rodadura y manejabilidad es la mejor posible, sin que suponga apenas ningún esfuerzo para el conductor pues no es él quien debe mantener el carro equilibrado ya que éste siempre encontrará el equilibrio, soportado entre el par motor y, en todo caso, la simple sujeción del manillar. Como ejemplos de carros peatonales de carga con auto-equilibrio cabe destacar US2004011573A1, del inventor del original Segway, que hace uso de n Segway PT, pero del revés, esto es, con el conductor a pie, agarrando el manillar desde el lado opuesto a la plataforma -que normalmente era el frontal del vehículo- usando dicha plataforma del vehículo como soporte de carga; y también EP3705101A1, que presenta una silla de ruedas o carro, funcionalmente muy similar al caso anterior. Sin embargo, presentan un importante primer problema a resolver: si las fuerzas realizadas por el conductor en el manillar fuesen tangenciales -tomando el eje de las ruedas como centro del giro de cabeceo-, la resultante sería un momento predecible de cabeceo o encabritado, y de esta forma, el control del auto-equilibrio respondería de la forma descrita anteriormente. El problema aparece cuando las fuerzas realizadas por el conductor tienen una componente normal, esto es, en dirección desde el manillar hacia el eje de las ruedas. En ese caso el sistema presenta una inestabilidad que puede alterar la intencionalidad de la acción de mando sobre el carro, por lo que, ante cualquier perturbación exterior, la resultante será un momento no predecible que puede ser de cabeceo o encabritado. Un ejemplo de ello es cuando el carro va marcha atrás: si el conductor se distrae y de repente intenta sujetar el carro para evitar que se le venga encima, la fuerza realizada por el conductor para retener el carro puede atravesar el eje de giro principal (eje de las ruedas) , y se puede resolver con un momento de cabeceo (caso favorable) , o un momento de encabritado (caso desfavorable) . En este último caso, se generaría un mayor empuje marcha atrás, atropellando al propio conductor. Un segundo problema a resolver aparece con los carros en los que su dimensión longitudinal es significativa, lo suficiente como para que la carga que se les va poniendo encima pueda producir un desplazamiento significativo del centro de masas. En tal caso, un desequilibrio grande de la carga es corregido con una inclinación significativa del carro, lo que provocaría que para manejar un carro así, a veces el manillar quedaría demasiado alto y otras demasiado bajo, lo que de por sí ya sería incómodo, pero es que además complicaría mucho la subida de pendientes en el primer caso, o la bajada en el segundo. Así, de hecho, estas invenciones, si es que han llegado al mercado, el inventor de la presente invención no ha logrado encontrar evidencias de ello. SUMARIO DE LA INVENCIÓN La presente invención aplica a carros dotados de asistencia eléctrica; que son peatonales, de modo que el conductor no va subido para ser transportado, sino que éste lo conduce al tiempo que camina manejándolo por medio de unos medios de agarre manual; y que ruedan apoyados sobre un único eje cuyas ruedas motorizadas responden a un sistema de control por auto-equilibrio, por lo que disponen de electrónica y programación. Conocido dicho "primer problema a resolver" -el que podría acabar en auto atropello-, se propone un carro peatonal con auto-equilibrio que incorpora un miembro de control abatible, con forma de asa, de forma que en uno de sus extremos comprende los medios de agarre manual o manillar y en su otro extremo dispone de medios de anclaje articulado que lo unen al carro, bien sea de forma directa al chasis, o a través de estructuras intermedias. Dicho miembro de control abatible pivota respecto a un eje transversal situado sobre las ruedas del carro y significativamente por encima de su eje de giro, esto es, a suficiente altura como para que un usuario medio al empujar o tirar del carro, agarrado del manillar, lo haga transmitiendo al carro fuerzas predominantemente horizontales, que de forma predominante inducirán momentos de cabeceo y encabritado -al empujar y al tirar- con lo que se evita cualquier riesgo de atropello por acción del auto-equilibrio, además de aportar empuje o tracción humana al empuje eléctrico, lo que puede ser de gran ayuda especialmente en caso de grandes pendientes o de grandes cargas en pendiente. Se comprueba además que esta invención, soluciona el segundo problema a resolver, puesto que la altura a la que el conductor lleve el manillar depende sólo de su comodidad y preferencias, y nunca de lo desequilibrada que esté dispuesta la carga en el carro. Dicho miembro de control abatible podrá disponer de suficiente grado de libertad en sus medios de anclaje articulado al carro como para adoptar una altura adecuada para usuarios muy altos y bajos. Así podrían ser regulables en altura. Dichos medios de anclaje articulado permitirán suficiente rango de abatimiento como para no hacer tope al subir o bajar cuestas pronunciadas, así como para poder mantener el carro equilibrado en reposo cuando la carga esté desequilibrada, ya que siempre que el conductor permanezca quieto, el carro también lo hará, pero adoptando un mayor o menor ángulo de cabeceo en función de cuán desequilibrado sea el reparto de la carga en ese momento. En cuanto al funcionamiento del carro, se establecen al menos dos modos de operación: el "modo conducción" y el "modo sin conductor". En el modo conducción, el conductor siempre ha de estar sujetando el manillar dentro de su rango de uso, y una vez activado dicho modo, por ejemplo, pulsando un pulsador o botón de activación, la electrónica del carro conservará un valor angular de cabeceo de referencia "cero" sobre la vertical, de forma que, si desde esa referencia cabecease bajando el morro, los motores ejercerían un par de avance, y viceversa. En cuanto el conductor haya soltado el manillar, es necesario asegurar que el carro no siga andando sólo, pues lo haría hasta chocar o encontrarse con alguna resistencia significativa, ya que cualquier desequilibrio en el reparto de la carga provocaría una tendencia a la inclinación hacia el lado más pesado y esa tendencia a la inclinación sería compensada con par motor y por tanto con el avance del carro en uno u otro sentido. De ello se ocupa el modo sin conductor, que se activaría en ese mismo instante. En una realización preferente, para el modo sin conductor, el carro dispondrá de una función "hombre muerto" de forma que, si el conductor soltase el manillar, por medio de uno o varios sensores correspondientes que reconocerían esa acción, se ejecutaría un comando que accionaría electrónicamente la controladora de los motores para frenar y parar el carro de orma segura dejándolo caer por balanceo hasta reposar sobre uno de sus extremos, y preferentemente vigilando que su velocidad siga siendo nula. En una realización particular de esta preferente, cuando el conductor soltase el manillar, el miembro de control abatible pivotaría cayendo por gravedad hasta un tope inferior, que mediante un correspondiente sensor con función "fin de carrera" accionaría electrónicamente la controladora para activar el modo sin conductor. En otra realización preferente del modo sin conductor, en el instante en que el conductor soltase el manillar, el carro activaría un programa de autoequilibrio con función de control de parada. Dicho programa de auto-equilibrio con función de control de parada calcula de forma automática una nueva referencia "cero", como valor de la medida angular sobre la vertical correspondiente al nuevo punto de equilibrio en que el carro alcance velocidad nula. Esto ocurre independientemente de cuán desequilibrada esté posicionada la carga en el carro, o de que éste se encuentre en una pendiente o en un terreno plano horizontal. Así el carro quedaría parado y en equilibrio sobre su eje de rodadura. De esta forma, en un suelo horizontal, el centro de masas del carro cargado quedaría posicionado justo por encima del eje de giro de las ruedas y la inclinación del carro se correspondería con la nueva referencia "cero"; y en pendiente, el carro permanecería inclinado hacia el lado de la pendiente positiva, y con valor de inclinación distinto al de referencia "cero" así que los motores estarían aplicando permanentemente el par equivalente a mantener el carro frenado en plena cuesta. Y si las condiciones de carga variasen, por ejemplo, porque se esté añadiendo más carga, puesto que se mantiene la condición de velocidad cero, el programa, que recalcula permanentemente, establecería una nueva referencia "cero" para seguir parado y estable. En tal caso, no podría dejarse reposar en el suelo sobre uno de sus extremos hasta que no entrase en funcionamiento otro modo de funcionamiento o de apagado que eventualmente tuviese programado por oftware, o dependiente de otros elementos de accionamiento electrónico, como un interruptor o un pulsador. DESCRIPCIÓN BREVE DE LAS FIGURAS • FIG-1 muestra una vista en perspectiva de un carro según la presente invención, en modo conducción. También muestra un conductor. • FIG-2 muestra una vista en perspectiva de un carro según la presente invención, en modo sin conductor, reposado en el suelo sobre uno de sus extremos. EXPOSICIÓN DETALLADA DE MODO PREFERENTE DE REALIZACIÓN La presente invención propone un carro dotado de asistencia eléctrica y sistema de control por auto-equilibrio -teniendo por tanto un único eje de rodadura (200) -, que comprende un chasis (1) , dos ruedas motorizadas (2) rodando sobre el único eje de rodadura (200) del carro, y unos medios de agarre manual (30) que no son solidarios al chasis (1) sino que están comprendidos en uno de los extremos de un miembro de control abatible (3) con forma de asa, que en su otro extremo dispone de unos medios de anclaje articulado (31) que lo unen al chasis (1.- aunque en este caso de forma indirecta por medio de un cajón unido a estructuralmente al chasis- definiendo un eje de abatimiento (310) transversal, situado significativamente por encima de los respectivos ejes de giro (20) de las ruedas (2) , sobre el que dicho miembro de control abatible (3) tiene libertad de giro. En este caso preferente, su chasis (1) es simétrico respecto de un plano transversal que contiene a los ejes de giro (20) de las ruedas (2) para lograr un óptimo reparto de pesos, y dichos medios de anclaje articulado (31) se sitúan en dicho plano de simetría y a una altura próxima a la de la cadera de un usuario medio, por ejemplo a una altura del suelo entre 80 y 110 cm, definiendo un eje de abatimiento (310) sobre el que dicho miembro de control batible (3) tiene libertad de giro o pivote, dentro de un rango de uso delimitado por al menos un tope sensorizado (13) . En esta realización preferente, tanto el encendido del carro como cualquier eventual contacto del miembro de control abatible (3) con el tope sensorizado (13) , activa la función "hombre muerto", asegurando que las ruedas motorizadas (2) tengan velocidad cero respecto del chasis y que el carro está en modo sin conductor. En este modo, siempre que no estemos sujetando el carro manualmente, una de sus patas (101, 102) estará sirviendo de apoyo e incluso de taco de freno. En esta realización preferente, para activar el modo de conducción, primero el conductor habrá de sujetar el miembro de control abatible (3) por los miembros de agarre manual (30) y tirando o empujando de ellos, hacer bascular el carro sobre sus ruedas (2) hasta llevarlo a una inclinación cercana al equilibrio que le resulte cómoda mantener. Entones pulsando un botón de activación (301) , preferentemente situado junto a los medios de agarre manual (30) , la programación electrónica desbloqueará el "modo sin conductor" y establecerá como nueva referencia "cero" el valor del ángulo correspondiente a la inclinación en ese momento, y desde ese instante, el control electrónico hará aplicar par motor en función del ángulo de inclinación del carro respecto a dicha referencia "cero" así como de su variación en el tiempo. Para pasar de nuevo al modo de no conductor, pueden disponerse varias opciones: una es sin duda la de seguridad, que se activaría al soltar el manillar sin más, pero además podría también activarse este modo por ejemplo pulsando otro botón, con un sensor de presencia en la mano, o incluso que el mismo botón de activación (301) también cumpla esa función. OTRAS FORMAS DE REALIZACIÓN Respecto de la realización anteriormente descrita de la presente invención, otras modificaciones pueden emplearse sin apartarse del alcance de a presente invención como se define por las reivindicaciones adjuntas. Por ejemplo, que alguna de dichas articulaciones, o todas ellas, fueran materializadas por junturas flexibles... también el tamaño, la forma, la ubicación o la orientación de los diversos componentes se pueden variar. Los componentes que se muestran conectados directamente o en contacto entre sí pueden tener estructuras intermedias dispuestas entre ellos. Las funciones de un elemento pueden ser realizadas por dos, y viceversa. Por lo tanto, el alcance de la invención no debe estar limitada por la realización específica descrita, sino por las reivindicaciones adjuntas. La presente invención bien es aplicable a carros de carga, de servicios de limpieza u otro, o incluso carros más pequeños como carritos de la compra de uso personal. Por tanto, es aplicable a todo tipo de trolleys, carritos, carros y chasis rodantes en general.
Publicaciones:
ES2957718 (24/01/2024) - A1 Solicitud de patente con informe sobre el estado de la técnica
Eventos:
En fecha 19/06/2022 se realizó Registro Instancia de Solicitud
En fecha 20/06/2022 se realizó Admisión a Trámite
En fecha 20/06/2022 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 01/07/2022 se realizó Concesión solicitud de reducción de tasas
En fecha 07/07/2022 se realizó Publicación concesión reducción de tasas
En fecha 15/07/2022 se realizó Superado examen de oficio
En fecha 14/11/2022 se realizó Realizado IET
En fecha 18/11/2022 se realizó 1109P_Comunicación Traslado del IET
En fecha 24/01/2024 se realizó Publicación Solicitud
En fecha 24/01/2024 se realizó Publicación Folleto Solicitud con IET (A1)
Pagos:
18/06/2022 - Pago Tasas IET
Fuente de la información
Parte de la información aquí publicada es pública puesto que ha sido obtenida de la Oficina de Propiedad Industrial de los diferentes países el 27/04/2024 y por lo tanto puede ser que la información no esté actualizada.Parte de la información aquí mostrada ha sido calculada por nuestro sistema informático y puede no ser veraz.
Privacidad
Si considera que al información aquí publicada afecta a su privacidad y desea que eliminemos la información aquí publicada envíe un email a info@patentes-y-marcas.com o rellene el formulario que encontrará aquí.Información sobre el registro de patente nacional por CARRO PEATONAL DOTADO DE ASISTENCIA ELÉCTRICA Y SISTEMA DE CONTROL POR AUTO-EQUILIBRIO con el número P202230541
El registro de patente nacional por CARRO PEATONAL DOTADO DE ASISTENCIA ELÉCTRICA Y SISTEMA DE CONTROL POR AUTO-EQUILIBRIO con el número P202230541 fue solicitada el 19/06/2022. Se trata de un registro en España por lo que este registro no ofrece protección en el resto de países. El registro CARRO PEATONAL DOTADO DE ASISTENCIA ELÉCTRICA Y SISTEMA DE CONTROL POR AUTO-EQUILIBRIO con el número P202230541 fue solicitada por GENIUS EMOBILITY SYSTEMS SL. El registro [modality] por CARRO PEATONAL DOTADO DE ASISTENCIA ELÉCTRICA Y SISTEMA DE CONTROL POR AUTO-EQUILIBRIO con el número P202230541 está clasificado como B62D 51/04,B62K 11/00 según la clasificación internacional de patentes.
Otras invenciones solicitadas por GENIUS EMOBILITY SYSTEMS SL
Es posible conocer todas las invenciones solicitadas por GENIUS EMOBILITY SYSTEMS SL entre las que se encuentra el registro de patente nacional por CARRO PEATONAL DOTADO DE ASISTENCIA ELÉCTRICA Y SISTEMA DE CONTROL POR AUTO-EQUILIBRIO con el número P202230541. Si se desean conocer más invenciones solicitadas por GENIUS EMOBILITY SYSTEMS SL clicar aquí.Otras invenciones solicitadas en la clasificación internacional de patentes B62D 51/04,B62K 11/00.
Es posible conocer invenciones similares al campo de la técnica se refiere. El registro de patente nacional por CARRO PEATONAL DOTADO DE ASISTENCIA ELÉCTRICA Y SISTEMA DE CONTROL POR AUTO-EQUILIBRIO con el número P202230541 está clasificado con la clasificación B62D 51/04,B62K 11/00 por lo que si se desea conocer más registros con la clasificación B62D 51/04,B62K 11/00 clicar aquí.Patentes en España
Es posible conocer todas las invenciones publicadas en España entre las que se encuentra el registro patente nacional por CARRO PEATONAL DOTADO DE ASISTENCIA ELÉCTRICA Y SISTEMA DE CONTROL POR AUTO-EQUILIBRIO. Nuestro portal www.patentes-y-marcas.com ofrece acceso a las publicaciones de patentes en España. Conocer las patentes registradas en un país es importante para saber las posibilidades de fabricar, vender o explotar una invención en España.Patentes registradas en la clase B
Es posible conocer todas las patentes registradas en la clase B (TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTE ) entre las que se encuentra la patente CARRO PEATONAL DOTADO DE ASISTENCIA ELÉCTRICA Y SISTEMA DE CONTROL POR AUTO-EQUILIBRIO con el número P202230541. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase B62
Es posible conocer todas las patentes registradas en la clase B62 (VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES) entre las que se encuentra la patente CARRO PEATONAL DOTADO DE ASISTENCIA ELÉCTRICA Y SISTEMA DE CONTROL POR AUTO-EQUILIBRIO con el número P202230541. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase B62D
Es posible conocer todas las patentes registradas en la clase B62D (VEHICULOS DE MOTOR; REMOLQUES) entre las que se encuentra la patente CARRO PEATONAL DOTADO DE ASISTENCIA ELÉCTRICA Y SISTEMA DE CONTROL POR AUTO-EQUILIBRIO con el número P202230541. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase B62K
Es posible conocer todas las patentes registradas en la clase B62K (CICLOS; CUADROS PARA CICLOS; DISPOSITIVOS DE DIRECCION; MANDOS ACCIONADOS POR EL CONDUCTOR ADAPTADOS) entre las que se encuentra la patente CARRO PEATONAL DOTADO DE ASISTENCIA ELÉCTRICA Y SISTEMA DE CONTROL POR AUTO-EQUILIBRIO con el número P202230541. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.
¿Tienes alguna duda?
Escribe tu consulta y te responderemos rápida y gratuitamente.

Otras patentes similares
 P202230537
P202230537
 P202230542
P202230542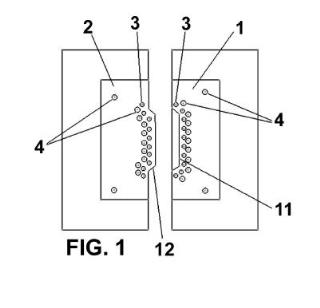 P202230543
P202230543Profesionales Recomendados
Barcelona
933182440
España
933182440
España

Barcelona
+34 93 362 16 97
España
+34 93 362 16 97
España

Barcelona
932 593 600
España
932 593 600
España







