


- Home /
- Publicaciones de patentes /
- SISTEMA Y MÉTODO DE LOCALIZACIÓN DE FALTAS A TIERRA EN DEVANADOS DE MÁQUINAS ELÉCTRICAS
Patente nacional por "SISTEMA Y MÉTODO DE LOCALIZACIÓN DE FALTAS A TIERRA EN DEVANADOS DE MÁQUINAS ELÉCTRICAS"
Este registro ha sido solicitado por
Persona física
a través del representanteELZABURU, S.L.P
Contacto
- Estado: Vigente
- País:
- España
- Fecha solicitud:
- 30/12/2020
- Número solicitud:
-
P202031319
- Número publicación:
-
ES2848598
- Fecha de concesión:
-
14/02/2022
- Inventores:
-
Persona física
- Datos del titular:
-
Persona física
- Datos del representante:
-
ELZABURU, S.L.P
- Clasificación Internacional de Patentes:
- G01R 31/72,G01R 31/52
- Clasificación Internacional de Patentes de la publicación:
- G01R 31/72,G01R 31/52
- Fecha de vencimiento:
Quiero registrar una patente

Reivindicaciones:
+ ES-2848598_B21.- Método de localización de faltas a tierra (4) en devanados (3) de máquinaseléctricas, del tipo basado en análisis de respuesta en frecuencia, caracterizado porque comprende -al menos- las siguientes etapas: - inyectar señales eléctricas de frecuencia variable y amplitud constante por un borne (1) del devanado (3) en falta de la maquina eléctrica y medir (9) en el borne contrario (2) de dicho devanado -al menos- la ganancia (12) , fase (13) y frecuencia (14) correspondiente; - calcular las funciones de transferencia de fase (15) y ganancia (16) en función de las medidas (9) de ganancia (12) , fase (13) y frecuencia (14) obtenidas en la etapa anterior; - obtener (17) la frecuencia de resonancia (fR) para el devanado en falta; - obtener (18) la ganancia A (fR) correspondiente a la frecuencia de resonancia (fR) del devanado en falta; - obtener una curva de corte de frecuencia de resonancia (19) a partir de una base de datos que comprende emulaciones de faltas a distintas resistencias de falta (Rf) y en distintas espiras para un devanado tipo, siendo (n) el número de espira en falta, determinando para ello la frecuencia de resonancia del devanado en falta mediante la casación de un plano paralelo a los ejes Rf y n, de tal forma que fR = cte, obteniendo una curva bidimensional (21a) que depende exclusivamente de los parámetros Rf y n, producida por el corte entre dicho plano (fR=cte) y la curva de corte de frecuencia de resonancia -en tres dimensiones- de la base de datos; - obtener una curva de corte de ganancia constante (20) a partir de una base de datos que comprende valores de anteriores ensayos de faltas a distintas resistencias de falta y en distintas espiras para un devanado tipo, determinando para ello la ganancia para la frecuencia de resonanciadel devanado en falta mediante la casación de un plano paralelo a losejes Rf y n de tal forma que A (fR) = cte obteniendo una curvabidimensional (21b) que depende exclusivamente de los parámetros Rf y n, producida or el corte entre dicho plano (A (fR) =cte) y la curva de corte de ganancia constante -en tres dimensiones- de la base de datos; - determinar (23) el número de espira en falta (n) y (24) la resistencia de defecto (Rf) del devanado en falta de la maquina eléctrica como el punto de corte entre la curva de corte de frecuencia de resonancia y la curva de corte de ganancia constante; y - emitir (25) la información de falta una vez recopiladas las señales de numero de espira en falta (n) y resistencia de falta (Rf) a un dispositivo de monitoreo externo o relé de protección. 2.- Método de localización de faltas a tierra según la reivindicación 1, en el que en la etapa (17) arriba indicada, la frecuencia la frecuencia de resonancia (fR) es el valor de frecuencia para el cual la respuesta en frecuencia de la fase del devanado (3) es nula. 3.- Método de localización de faltas a tierra según cualquiera de las reivindicaciones anteriores, en el que en la etapa (19) arriba indicada, las emulaciones de faltas son funciones del tipo superficie espacial que dependen del número de espira en falta (n) , de la resistencia de defecto (Rf ) y de la frecuencia de resonancia (fR) . 4.- Método de localización de faltas a tierra según cualquiera de las reivindicaciones anteriores, en el que en la etapa (20) arriba indicada, los valoresde anteriores ensayos de faltas son funciones del tipo superficie espacial que dependen del número de espira en falta (n) , de la resistencia de defecto, (Rf) y de la ganancia asignada a frecuencia de resonancia, A (fR) . 5.- Sistema de localización de faltas a tierra (4) en devanados (3) de máquinaseléctricas, del tipo basado en análisis de respuesta en frecuencia, provisto de: - un dispositivo (5) de inyección de tensión a frecuencia variable y amplitud constante entre un borne del devanado en falta y una referencia a tierra; - una impedancia (6) de medida calibrada, conectada entre el otro borne del devanado en falta y una referencia a tierra (8) ; - un medidor (7) de salida configurado para medir entre los bornes de la impedancia de medida calibrada, determinar la ganancia (12) y fase (13) del devanado (3) en función de la frecuencia (14) de inyección y enviar icha información a un receptor; en donde está provisto además de un dispositivo (11) de localización de faltas a tierra que comprende -al menos- los siguientes elementos: - un receptor, configurado para recibir las medidas de frecuencia (14) , fase (13) y ganancia (12) obtenidas por el medidor (7) de salida; - medios constructores de funciones de transferencia de fase y ganancia, configurados para calcular la función de transferencia de fase y ganancia a partir de las medidas de frecuencia (14) , fase (13) y ganancia (12) obtenidas por el medidor (7) de salida; el dispositivo (11) de localización de faltas a tierra caracterizado porque comprende: - medios calculadores de la frecuencia de resonancia y ganancia, configurados para calcular la frecuencia de resonancia fR y la ganancia a dicha frecuencia de resonancia A (fR) del devanado en falta, a partir de las medidas frecuencia (14) , fase (13) y ganancia (12) obtenidas por elmedidor (7) de salida; - un dispositivo de almacenamiento de bases de datos de ensayos previos de faltas en un devanado tipo, en los que se han emulado faltas en distintas espiras y con distintas resistencias de falta, configuradas para proporcionar el número de espira (n) de la falta a tierra a partir de la frecuencia de resonancia fR y ganancia A (fR) para dicha frecuencia de resonancia; - medios calculadores de curvas de corte, configurados para calcular una curva de corte de frecuencia de resonancia y una curva de corte de ganancia constante a partir de los valores de frecuencia de resonancia y ganancia del devanado ensayado incluidos en la base de datos; - un localizador de faltas, configurado para hallar el punto de corte de las curvas obtenidas por los medios calculadores de curvas, siendo dicho punto de corte una función del número de espira (n) de la falta y de la resistencia de falta (Rf) ; y - un elemento emisor de información configurado para enviar el número de espira (n) de la falta y la resistencia de falta (Rf) , obtenidas por el localizador de faltas. 6.- Sistema de localización de faltas a tierra según la reivindicación 5, en el que las bases de datos de ensayos previos de emulaciones de faltas en forma de funciones del tipo superficie espacial que dependen del número de espira en falta (n) , de la resistencia de defecto (Rf ) y de la frecuencia de resonancia (fR) .
+ ES-2848598_A11.- Método de localización de faltas a tierra (4) en devanados (3) de máquinas eléctricas, del tipo basado en análisis de respuesta en frecuencia, caracterizado porque comprende -al menos- las siguientes etapas: - inyectar señales eléctricas de frecuencia variable y amplitud constante por un borne (1) del devanado (3) en falta de la maquina eléctrica y medir (9) en el borne contrario (2) de dicho devanado -al menos- la ganancia (12) , fase (13) y frecuencia (14) correspondiente; - calcular las funciones de transferencia de fase (15) y ganancia (16) en función de las medidas (9) de ganancia (12) , fase (13) y frecuencia (14) obtenidas en la etapa anterior; - obtener (17) la frecuencia de resonancia (fR) para el devanado en falta; - obtener (18) la ganancia A (fR) correspondiente a la frecuencia de resonancia (fR) del devanado en falta; - obtener una curva de corte de frecuencia de resonancia (19) a partir de una base de datos que comprende emulaciones de faltas a distintas resistencias de falta (Rf) y en distintas espiras para un devanado tipo, siendo (n) el número de espira en falta, determinando para ello la frecuencia de resonancia del devanado en falta mediante la casación de un plano paralelo a los ejes Rf y n, de tal forma que f R = cte, obteniendo una curva bidimensional (21a) que depende exclusivamente de los parámetros Rf y n, producida por el corte entre dicho plano (fR=cte) y la curva de corte de frecuencia de resonancia -en tres dimensiones- de la base de datos; - obtener una curva de corte de ganancia constante (20) a partir de una base de datos que comprende valores de anteriores ensayos de faltas a distintas resistencias de falta y en distintas espiras para un devanado tipo, determinando para ello la ganancia para la frecuencia de resonancia del devanado en falta mediante la casación de un plano paralelo a los ejes Rf y n de tal forma que A (fR) = c t e, obteniendo una curva bidimensional (21b) que depende exclusivamente de los parámetros Rf y n, producida por el corte entre dicho plano (A (fR) =cte) y la curva de corte de ganancia constante -en tres dimensiones- de la base de datos; - determinar (23) el número de espira en falta (n) y (24) la resistencia de defecto (Rf) del devanado en falta de la maquina eléctrica como el punto de corte entre la curva de corte de frecuencia de resonancia y la curva de corte de ganancia constante; y - emitir (25) la información de falta una vez recopiladas las señales de numero de espira en falta (n) y resistencia de falta (Rf) a un dispositivo de monitoreo externo o relé de protección. 2.- Método de localización de faltas a tierra según la reivindicación 1, en el que en la etapa (17) arriba indicada, la frecuencia la frecuencia de resonancia (fR) es el valor de frecuencia para el cual la respuesta en frecuencia de la fase del devanado (3) es nula. 3.- Método de localización de faltas a tierra según cualquiera de las reivindicaciones anteriores, en el que en la etapa (19) arriba indicada, las emulaciones de faltas son funciones del tipo superficie espacial que dependen del número de espira en falta (n) , de la resistencia de defecto (Rf ) y de la frecuencia de resonancia (fR) . 4.- Método de localización de faltas a tierra según cualquiera de las reivindicaciones anteriores, en el que en la etapa (20) arriba indicada, los valores de anteriores ensayos de faltas son funciones del tipo superficie espacial que dependen del número de espira en falta (n) , de la resistencia de defecto, (Rf) y de la ganancia asignada a frecuencia de resonancia, A (fR) . 5.- Sistema de localización de faltas a tierra (4) en devanados (3) de máquinas eléctricas, del tipo basado en análisis de respuesta en frecuencia, provisto de: - un dispositivo (5) de inyección de tensión a frecuencia variable y amplitud constante entre un borne del devanado en falta y una referencia a tierra; - una impedancia (6) de medida calibrada, conectada entre el otro borne del devanado en falta y una referencia a tierra (8) ; - un medidor (7) de salida configurado para medir entre los bornes de la impedancia de medida calibrada, determinar la ganancia (12) y fase (13) del devanado (3) en función de la frecuencia (14) de inyección y enviar icha información a un receptor; caracterizado porque está provisto además de un dispositivo (11) de localización de faltas a tierra que comprende -al menos- los siguientes elementos: - un receptor, configurado para recibir las medidas de frecuencia (14) , fase (13) y ganancia (12) obtenidas por el medidor (7) de salida; - medios constructores de funciones de transferencia de fase y ganancia, configurados para calcular la función de transferencia de fase y ganancia a partir de las medidas de frecuencia (14) , fase (13) y ganancia (12) obtenidas por el medidor (7) de salida; - medios calculadores de la frecuencia de resonancia y ganancia, configurados para calcular la frecuencia de resonancia fR y la ganancia a dicha frecuencia de resonancia A (fR) del devanado en falta, a partir de las medidas frecuencia (14) , fase (13) y ganancia (12) obtenidas por el medidor (7) de salida; - un dispositivo de almacenamiento de bases de datos de ensayos previos de faltas en un devanado tipo, en los que se han emulado faltas en distintas espiras y con distintas resistencias de falta, configuradas para proporcionar el número de espira (n) de la falta a tierra a partir de la frecuencia de resonancia fR y ganancia A (fR) para dicha frecuencia de resonancia; - medios calculadores de curvas de corte, configurados para calcular una curva de corte de frecuencia de resonancia y una curva de corte de ganancia constante a partir de los valores de frecuencia de resonancia y ganancia del devanado ensayado incluidos en la base de datos; - un localizador de faltas, configurado para hallar el punto de corte de las curvas obtenidas por los medios calculadores de curvas, siendo dicho punto de corte una función del número de espira (n) de la falta y de la resistencia de falta (Rf) ; y - un elemento emisor de información configurado para enviar el número de espira (n) de la falta y la resistencia de falta (Rf) , obtenidas por el localizador de faltas. 6.- Sistema de localización de faltas a tierra según la reivindicación 5, en el que as bases de datos de ensayos previos de emulaciones de faltas en forma de funciones del tipo superficie espacial que dependen del número de espira en falta (n) , de la resistencia de defecto (Rf ) y de la frecuencia de resonancia (fR) .
Los productos y servicios protegidos por este registro son:
G01R 31/72 - G01R 31/52
Descripciones:
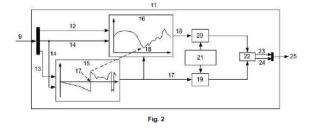
+ ES-2848598_B2 SISTEMA Y MÉTODO DE LOCALIZACIÓN DE FALTAS A TIERRA EN DEVANADOS DE MÁQUINAS ELÉCTRICAS OBJETO DE LA INVENCIÓN La presente invención se refiere a un método y sistema de localización de faltas a tierra en devanados de máquinas eléctricas capaz de localizar este tipo de falta estando en cualquier punto del circuito eléctrico, con este desconectado de la red eléctrica. El método y sistema de localización de faltas a tierra en arrollamientos eléctricos según la presente invención es de utilidad para el mantenimiento, principalmente correctivo, de máquinas eléctricas pudiendo ser también de aplicación en el mantenimiento predictivo gracias a que dicho sistema permite la obtención de la resistencia de defecto de una posible falta en el sistema eléctrico, así como el número de espira donde se encuentra dicho defecto. ANTECEDENTES DE LA INVENCIÓN A lo largo de la vida útil de las máquinas eléctricas uno de los fallos más comunes que puede experimentar dicha maquinaria es la aparición de faltas a tierra. Estas faltas ponen en riesgo la integridad de las máquinas y pueden afectar directamente a una alteración en su funcionamiento o provocar daños severos en máquinas adyacentes o en la salud de trabajadores cercanos. El campo del diagnóstico se encarga entonces de detectar y localizar estas faltas para evitar que aparezcan este tipo de defectos entre otros o en su defecto para proceder a una rápida protección del sistema eléctrico en cuestión. Son muchos los sistemas que se encargan de detectar o localizar faltas a tierra en máquinas eléctricas, por ejemplo, los sistemas mostrados en los siguientes documentos: La patente US 6794879 B2 titulada "Apparatus and method for detecting and calculating ground fault resistance" se refiere a una invención que diagnostica faltas en el devanado de campo de máquinas síncronas. Utiliza la inyección de onda cuadrada entre terminales de alimentación de la excitación, y dependiendo de la deformación de dicha onda cuadrada en el sensor emplazado aguas abajo se puede estimar la localización de la falta en el devanado inductor así como la resistencia de falta. La patente US 10429419 B2 titulada "System and method for iterative condition monitoring and fault diagnosis of electric machines" se refiere a una invención que analiza la señal de corriente de las corrientes del estator y armónicos determinados con el objetivo de detectar posibles faltas como excentricidades en las máquinas. La patente DE 102001003021 B4 titulada "Methods and apparatus for diagnosing stator windings in an electric motor se refiere a un método y sistema para el diagnóstico de faltas en estátores de máquinas eléctricas que mediante la medida de corriente y tensión y su comparación en secuencia inversa con ciertas referencias preestablecidas es capaz de detectar faltas dichos devanados. La patente ES 2454045 A1 titulada "Sistema y método de localización de defectos a tierra en devanados estatóricos de máquinas síncronas puestas a tierra mediante una impedancia de elevado valor basado en la estimación de la resistencia de defecto a baja frecuencia" se refiere a un sistema y método en el que se localizan faltas a tierra mediante la utilización de variables de una etapa de medida y la inyección de una onda de tensión de baja frecuencia entre el neutro de un generador síncrono y tierra. Finalmente, la solicitud de patente P202030371 "Sistema y método de localización de faltas a tierra en arrollamientos eléctricos" utiliza la técnica de análisis de la respuesta en frecuencia para la localización de los defectos a tierra, sin embargo en este método hay que realizar dos ensayos al devanado, inyectando por ambos extremos. Para localizar defectos y faltas en máquinas paradas u off-line, habitualmente se tiliza la técnica de análisis de respuesta en frecuencia, o FRA, especialmente en transformadores en los que se pretende localizar faltas entre espiras, o el movimiento de los arrollamientos de dichos transformadores durante el transporte o tras sobrecorrientes. Esta técnica comprende inyectar una onda de tensión sinusoidal con amplitud fija normalmente de 1 o 10 V con frecuencia variable entre 10 Hz y 20 MHz y el registro de la tensión de salida en el otro extremo del circuito a analizar en una resistencia de valor conocido. Mediante la obtención de la función de transferencia se obtienen los parámetros ganancia y fase de esta que se utilizan para los análisis de fallos. Los ensayos FRA son -habitualmente- capaces de detectar la existencia de faltas a tierra. No obstante, es mucho menos frecuente que dichos ensayos permitan obtener la localización de las dichas faltas. A continuación se muestran varias formas de detectar defectos con esta técnica: En el artículo "Y. Liu et al., "A study of the sweep frequency impedance method and its application in the detection of internal winding short circuit faults in power transformers, " in IEEE Transactions on Dielectrics and Electrical Insulation, vol. 22, no. 4, pp. 2046-2056, August 2015" se divulga un método de análisis mediante la técnica FRA centrado en el análisis de su impedancia (SFI) . Observando fluctuaciones en la amplitud de ganancia del sistema, este detecta y cuantifica posibles faltas entre espiras en transformadores, pero sin referirse a la localización de estas. En el artículo "J. Nosratian Ahour, S. Seyedtabaii and G. B. Gharehpetian, "Determination and localisation of turn-to-turn fault in transformer winding using frequency response analysis, " in IET Science, Measurement & Technology, vol. 12, no. 3, pp. 291-300, 5 2018." La invención se refiere a un método para la detección y localización de faltas entre espiras con el mismo sistema FRA. Este método se basa en la comparación de patrones calculados mediante un modelo matemático y la ganancia FRA obtenida en el ensayo directo al transformador. A diferencia del método anterior, este es capaz de estimar la localización de la falta por secciones del devanado. Otras técnicas de diagnóstico de faltas en sistemas con devanados están ligadas a la inteligencia artificial (IA) y al aprendizaje de la propia IA con el tiempo en el ajuste de modelos que después se utilizan para contrastar con los diagnósticos FRA recogidos de los equipos. En el artículo "V. Nurmanova, M. Bagheri, A. Zollanvari, K. Aliakhmet, Y. Akhmetov and G. B. Gharehpetian, "A New Transformer FRA Measurement Technique to Reach Smart Interpretation for Inter-Disk Faults, " in IEEE Transactions on Power Deliver y , vol. 34, no. 4, pp. 1508-1519, Aug. 2019." esta técnica se utiliza para sistemas con faltas entre espiras o entre discos de devanados para transformadores eléctricos. Finalmente, en el artículo "A. Mugarra, C. A. Platero, J. A. Martínez and U. Albizuri-Txurruka, "Validity of Frequency Response Analysis (FRA) for Diagnosing Large Salient Poles of Synchronous Machines, " in IEEE Transactions on Industr y Applications, vol. 56, no. 1, pp. 226-234, Jan.-Feb. 2020." se trata el FRA para faltas entre espiras, así como para faltas a tierra. Sin embargo, no se procede a la localización de ningún tipo de ellas, pero si a su detección mediante la observación de la frecuencia de resonancia del sistema ensayado. Viendo el estado de la técnica se concluye en que es necesario establecer nuevos sistemas y métodos de análisis FRA para la localización de faltas a tierra en máquinas eléctricas de tal forma que hagan de esta un proceso sencillo de ejecutar y fácil de interpretar. Además, sería ventajoso que dichos sistemas y métodos de localización de faltas a tierra de permitiesen obtener la localización (n) y la magnitud del defecto en valores óhmicos de resistencia de defecto (Rf) . DESCRIPCIÓN DE LA INVENCIÓN La presente invención pretende abordar todas las desventajas e inconvenientes del estado de la técnica anterior. Para ello, la invención contempla un sistema y un método de localización de faltas a tierra en devanados de máquinas eléctricas basados en la técnica de análisis de respuesta en frecuencia del circuito de la máquina. Más en articular, un primer objeto de la invención se refiere a un método de localización de faltas a tierra en devanados de máquinas eléctricas, del tipo asado en análisis de respuesta en frecuencia, caracterizado porque comprende -al menos- las siguientes etapas: a) inyectar señales eléctricas de frecuencia variable y amplitud constante por un borne del devanado en falta de la maquina eléctrica y medir en el borne contrario de dicho devanado -al menos- la ganancia, fase y frecuencia correspondiente; b) calcular las funciones de transferencia de fase y ganancia en función de las medidas de ganancia, fase y frecuencia obtenidas en la etapa anterior; c) obtener la frecuencia de resonancia (fR) para el devanado en falta; d) obtener la ganancia A (fR) correspondiente a la frecuencia de resonancia (fR) del devanado en falta; e) obtener una curva de corte de frecuencia de resonancia a partir de una base de datos que comprende emulaciones de faltas a distintas resistencias de falta (Rf) y en distintas espiras para un devanado tipo, siendo (n) el número de espira en falta, determinando para ello la frecuencia de resonancia del devanado en falta mediante la casación de un plano paralelo a los ejes Rf y n, de tal forma que f R = cte, obteniendo una curva bidimensional -que depende exclusivamente de los parámetros Rf y n- producida por el corte entre dicho plano (fR=cte) y la curva de corte de frecuencia de resonancia -en tres dimensiones- de la base de datos; f) obtener una curva de corte de ganancia constante a partir de una base de datos que comprende valores de anteriores ensayos de faltas a distintas resistencias de falta y en distintas espiras para un devanado tipo, determinando para ello la ganancia para la frecuencia de resonancia del devanado en falta mediante la casación de un plano paralelo a los ejes Rf y n de tal forma que A (fR) = c t e, obteniendo una curva bidimensional -que depende exclusivamente de los parámetros Rf y n, producida por el corte entre dicho plano (A (fR) =cte) y la curva de corte de ganancia constante -en tres dimensiones- de la base de datos; g) determinar el número de espira en falta (n) y la resistencia de defecto (Rf) del devanado en falta de la maquina eléctrica como el punto de corte entre la curva de corte de frecuencia de resonancia y la curva de corte de ganancia constante; y h) emitir la información de falta una vez recopiladas las señales de numero de espira en falta y resistencia de falta a un dispositivo de monitoreo externo o relé de protección. En una realización preferida de la invención, en la etapa c) arriba indicada, la frecuencia la frecuencia de resonancia fR es el valor de frecuencia para el cual la respuesta en frecuencia de la fase del devanado es nula (en otras palabras, cuando el circuito eléctrico es puramente resistivo) . En una realización preferida de la invención, en la etapa e) arriba indicada, las emulaciones de faltas son funciones del tipo superficie espacial que dependen del número de espira en falta (n) , de la resistencia de defecto (Rf ) y de la frecuencia de resonancia (fR) . En una realización preferida de la invención, en la etapa f) arriba indicada, los valores de anteriores ensayos de faltas son funciones del tipo superficie espacial que dependen del número de espira en falta (n) , de la resistencia de defecto, (Rf) y de la ganancia asignada a frecuencia de resonancia, A (fR) . Un segundo aspecto de la invención se refiere a un sistema de localización de faltas a tierra en devanados de máquinas eléctricas, del tipo basado en análisis de respuesta en frecuencia, provisto de: - un dispositivo de inyección de tensión a frecuencia variable y amplitud constante entre un borne del devanado en falta y una referencia a tierra; - una impedancia de medida calibrada, conectada entre el otro borne del devanado en falta y una referencia a tierra; - un medidor de salida configurado para medir entre los bornes de la impedancia de medida calibrada, determinar la ganancia y fase del devanado en función de la frecuencia de inyección y enviar dicha información a un receptor; caracterizado porque está provisto además de un dispositivo de localización de faltas a tierra que comprende -al menos- los siguientes elementos: - un receptor, configurado para recibir las medidas de frecuencia, fase y ganancia obtenidas por el medidor de salida; - medios constructores de funciones de transferencia de fase y ganancia, configurados para calcular la función de transferencia de fase y ganancia a partir de las medidas de frecuencia, fase y ganancia del medidor de salida; - medios calculadores de la frecuencia de resonancia y ganancia, configurados para calcular la frecuencia de resonancia fR y la ganancia a dicha frecuencia de resonancia A (fR) del devanado en falta, a partir de las medidas de frecuencia, fase y ganancia del medidor de salida; - un dispositivo de almacenamiento de bases de datos de ensayos previos de faltas en un devanado tipo, en los que se han emulado faltas en distintas espiras y con distintas resistencias de falta, estando las bases de datos configuradas para proporcionar el número de espira (n) de la falta a tierra a partir de la frecuencia de resonancia y ganancia para dicha frecuencia de resonancia; - medios calculadores de curvas de corte, configurados para calcular una curva de corte de frecuencia de resonancia y una curva de corte de ganancia constante a partir de los valores de frecuencia de resonancia y ganancia del devanado ensayado incluidos en la base de datos; - un localizador de faltas, configurado para hallar el punto de corte de las curvas obtenidas por los medios calculadores de curvas, siendo dicho punto de corte una función del número de espira (n) de la falta y de la resistencia de falta (Rf) ; y - un elemento emisor de información configurado para enviar el número de espira (n) de la falta y la resistencia de falta (Rf) , obtenidas por el localizador de faltas. En una realización preferida de la invención, las bases de datos de ensayos previos de emulaciones de faltas en forma de funciones del tipo superficie espacial que dependen del número de espira en falta (n) , de la resistencia de defecto (Rf ) y de la frecuencia de resonancia (fR) . BREVE DESCRIPICIÓN DE LAS FIGURAS A continuación, se describen de manera muy breve una serie de dibujos que ayudan a comprender mejor la invención, que se relacionan expresamente con una realización de dicha invención y se presentan como unos ejemplos no limitativos de ésta. La figura 1 es un esquema de conexiones del sistema de análisis de respuesta en frecuencia (FRA) del devanado a ensayar y del sistema de localización de faltas a tierra; La figura 2 es un diagrama de bloques del sistema de localización de faltas a tierra según la presente invención; La figura 3 es una diagrama de flujo del método de localización de faltas de la invención; y La figura 4 es una representación gráfica de las superficies y curvas que se utilizan para la localización de faltas a tierra en la presente invención. REFERENCIAS NUMÉRICAS DE LAS FIGURAS (1) Borne de inyección de tensión. (2) Borne de medida de tensión de salida; (3) Devanado; (4) Falta a tierra; (5) Dispositivo de inyección de señales eléctricas a frecuencia variable y amplitud constante; (6) Impedancia de medida; (7) Medidor de salida; (8) Referencia a tierra; (9) Medidas recogidas; (10) Equipo de ensayos de análisis de respuesta en frecuencia (FRA) ; (11) Dispositivo de localización de faltas a tierra; (12) Señal de ganancia del devanado; (13) Señal de fase del devanado; (14) Señal de frecuencia; (15) Respuesta en frecuencia de la fase del devanado; (16) Respuesta en frecuencia de la ganancia del devanado; (17) Frecuencia de resonancia; (18) Ganancia para la frecuencia de resonancia; (19) Etapa de obtención de la curva de corte de frecuencia de resonancia a partir de una base de datos previamente almacenada para máquinas o devanados similares; (20) Etapa de obtención de la curva de corte de ganancia constante a partir de una base de datos previamente almacenada para máquinas o devanados similares; (21) Base de datos; (21.a) Superficie de faltas para frecuencias de resonancia; (21.b) Superficie de faltas para ganancias a frecuencia de resonancia; (22) Casación de las curvas de corte de fase y ganancia; (23) Señal de espira en falta; (24) Señal de resistencia de falta; (25) Etapa de emisión de información de falta; (26) Etapa de obtención de la frecuencia de resonancia; (27) Etapa de obtención de la ganancia a frecuencia de resonancia; (28) Curva de corte a frecuencia de resonancia (29) Curva de corte ganancia constante; (30) Eje-Z en frecuencia; (31) Eje-Z en ganancia. DESCRIPCIÓN DETALLADA DE LAS FIGURAS La presente invención se refiere a un sistema y método de localización de faltas a tierra en devanados de máquinas eléctricas capaz de localizar dichas faltas indicando el número de espira y resistencia de defecto entre dicha espira y tierra mediante el análisis de respuesta en frecuencia de un dispositivo FRA con un barrido en frecuencias que es práctica habitual que esté entre 10 Hz y 20 MHz, lo que es considerado suficiente para la obtención de datos relevantes a la localización de faltas en devanados eléctricos. En la figura 1 se puede observar el esquema de conexiones del equipo de medida FRA (10) , que permite la obtención de la función de transferencia del evanado ensayado donde se quiere localizar una falta a tierra. Dichas conexiones se producen en un devanado (3) con una falta a tierra (4) a localizar. Este dispone de un borne de inyección de tensión (1) mediante un dispositivo de inyección de tensión a frecuencia variable y amplitud constante (5) y un borne de medida de tensión de salida (2) conectada a una impedancia de medida (6) del equipo donde con un medidor de tensión de salida (7) , conectado entre dicho borne (2) y la referencia a tierra (8) del equipo FRA (10) , permite al menos la obtención de medidas (9) de ganancia y fase en función de la frecuencia de inyección. Dichas medidas son volcadas posteriormente a un dispositivo de localización de faltas a tierra (11) . En la figura 2 se muestra el diagrama de bloques del dispositivo de localización de faltas a tierra (11) . Primeramente, se recopilan las medidas recogidas (9) que han de ser al menos la señal de ganancia del devanado (12) , la señal de fase del devanado (13) y la señal de frecuencia (14) . Mediante estos datos recogidos por el equipo de medida FRA (10) se procede a la construcción de las funciones de transferencia de respuesta en frecuencia de la fase del devanado (15) y de respuesta en frecuencia de la ganancia del devanado (16) . El sistema y método contemplan el cálculo (17) de la frecuencia de resonancia del devanado (3) obteniendo el valor de frecuencia para el cual la respuesta en frecuencia de la fase del devanado (15) es nula. Posteriormente, con dicho valor de frecuencia de resonancia, fR, el sistema y método considera la utilización de dicho parámetro para la obtención (18) del valor de ganancia para la frecuencia de resonancia (18) introduciendo dicho valor de fR en la respuesta en frecuencia de la ganancia del devanado (16) . Una vez obtenidos ambos valores, la invención contempla la casación de dichos valores con una base de datos (21) , que dispone de superficies construidas mediante ensayos previos de laboratorio a devanados semejantes con faltas a tierra realizadas en diversos puntos con diversas resistencias de defecto, habiendo para ello construido funciones del tipo: fR = u (n, R f) M.fR) = v (n, Rf ) Donde: n: número de espira en falta. Rf: resistencia de falta. fR: frecuencia de resonancia. A (fR) : es la ganancia del sistema a frecuencia de resonancia de la falta. u y v son funciones generalizadas que dependerán del devanado ensayado. De esta forma que se disponen de dos superficies distintas: Una superficie para frecuencias de resonancia (17) proveniente de ensayos previos con faltas en distinta posición, es decir en distinto número de espira y resistencia de defecto, obtenido de la respuesta en frecuencia de la fase del devanado (15) . Y la otra superficie para ganancias a dicha frecuencia de resonancia (18) proveniente de ensayos previos con faltas en distintas posiciones y resistencia de defecto obtenido de la respuesta en frecuencia de la ganancia del devanado (16) . Con la frecuencia de resonancia (17) y ganancia a dicha frecuencia de resonancia se procede a las etapas de obtención de la curva de corte de frecuencia de resonancia a partir de una base de datos (19) y obtención de la curva de corte de ganancia constante a partir de una base de datos (20) que proponen curvas de corte con expresiones: u (n, R f) = cte1 v (n, R f) = cte2 Donde cte1 y cte2 son constantes y vienen definidos por el valor de frecuencia de resonancia (17) y su correspondiente ganancia del sistema, obtenidas en el ensayo para la localización de la falta a tierra del devanado (3) . En la resolución del problema de la localización, la presente invención contempla la casación de las curvas de corte de fase y ganancia (22) con las superficies anteriores de tal forma que dicha casación de ambas rectas define un punto de corte donde las coordenadas del punto en un plano con "ejes X-Y" = "ejes Rr n" o viceversa son las soluciones al problema de diagnóstico de faltas a tierra. Finalmente, el sistema y método de la invención permiten la emisión de información de una señal de espira en falta (23) y una señal de resistencia de falta (24) mediante una etapa de emisión de información de falta (25) a ispositivos externos, pudiendo ser estos entre otros, equipos de monitoreo o protección eléctrica. La figura 3 muestra el diagrama de flujo del método de la invención, donde se siguen los pasos anteriormente descritos. Primero se recopilan las señales de ganancia del devanado (12) , de fase del devanado (13) y de frecuencia (14) . Se proceden a construir las correspondientes funciones de transferencia de fase (15) y ganancia (16) y a partir de la primera se obtiene la frecuencia de resonancia para: arg[H (j2nfR) \ = 0 Donde H es la función de transferencia compleja obtenida en el equipo de medida FRA (10) . Una vez obtenida la frecuencia de resonancia (17) , se obtiene de la respuesta en frecuencia en ganancia (16) dicha ganancia (18) para el determinado valor de frecuencia de resonancia de tal forma que: H (j2 n fR) = A{fR) Una vez obtenidas la frecuencia de resonancia (17) y su correspondiente ganancia (18) se cargan desde la base de datos (21) la superficie de faltas para frecuencias de resonancia (21.a) y la superficie de faltas para ganancias a frecuencia de resonancia (21.b) correspondiente a ensayos previos de un devanado semejante. Se procede entonces a la introducción de los parámetros obtenidos en dicha base de datos mediante la etapa de obtención de la curva de corte de frecuencia de resonancia a partir de una base de datos (19) y la etapa de obtención de la curva de corte de ganancia constante a partir de una base de datos (20) para obtener las líneas que posteriormente se cortarán en un plano 2D donde cuyos ejes serán la resistencia de defecto, Rf, y el número de espira en falta, n. Introduciendo la curva de corte a frecuencia de resonancia (28) y curva de corte ganancia constante (29) en un plano 2D cuyos ejes serán la resistencia de defecto, Rf, y el número de espira en falta, n, se produce una casación de las curvas de corte (22) y se obtiene un punto de corte entre ellas donde la solución en resistencia de defecto (24) y numero de espira (23) en falta corresponde a la everidad de la falta y localización de la misma respectivamente. Finalmente, el método contempla la emisión de estos parámetros a otros dispositivos mediante una etapa de emisión de información de falta (25) . A modo de ejemplo representativo y no limitativo de la invención, la figura 4 muestra las superficies cargadas desde la base de datos para frecuencias de resonancia (21.a) y ganancia en dichas frecuencias de resonancia (21.b) en ejes tridimensionales. Los ejes de estas superficies son la resistencia de defecto (24) y el número de espiras (23) , como ejes X e Y y el Eje-Z en frecuencia (30) y la resistencia de defecto (24) y el número de espiras (23) como ejes X e Y y el Eje-Z en ganancia (31) respectivamente. Finalmente, procediendo al corte de la superficie referente a frecuencias de resonancia (21.a) con la frecuencia de resonancia (17) de la falta y al corte de la superficie referente a las ganancias a frecuencia de resonancia (21.b) con su respectiva ganancia (18) , se obtiene un plano bidimensional donde la casación de las curvas de corte previas (28 y 29) se cortan a su vez y permiten la obtención de la espira en falta, n, y la resistencia de defecto, Rf. El sistema y método de la invención pretende abordar las desventajas e inconvenientes presentados en el estado de la técnica proponiendo una forma de localización de faltas a tierra en el que se especifica la espira de defecto y la resistencia de defecto en dicho punto de una forma sencilla y rápida.
+ ES-2848598_A1 SISTEMA Y MÉTODO DE LOCALIZACIÓN DE FALTAS A TIERRA EN DEVANADOS DE MÁQUINAS ELÉCTRICAS OBJETO DE LA INVENCIÓN La presente invención se refiere a un método y sistema de localización de faltas a tierra en devanados de máquinas eléctricas capaz de localizar este tipo de falta estando en cualquier punto del circuito eléctrico, con este desconectado de la red eléctrica. El método y sistema de localización de faltas a tierra en arrollamientos eléctricos según la presente invención es de utilidad para el mantenimiento, principalmente correctivo, de máquinas eléctricas pudiendo ser también de aplicación en el mantenimiento predictivo gracias a que dicho sistema permite la obtención de la resistencia de defecto de una posible falta en el sistema eléctrico, así como el número de espira donde se encuentra dicho defecto. ANTECEDENTES DE LA INVENCIÓN A lo largo de la vida útil de las máquinas eléctricas uno de los fallos más comunes que puede experimentar dicha maquinaria es la aparición de faltas a tierra. Estas faltas ponen en riesgo la integridad de las máquinas y pueden afectar directamente a una alteración en su funcionamiento o provocar daños severos en máquinas adyacentes o en la salud de trabajadores cercanos. El campo del diagnóstico se encarga entonces de detectar y localizar estas faltas para evitar que aparezcan este tipo de defectos entre otros o en su defecto para proceder a una rápida protección del sistema eléctrico en cuestión. Son muchos los sistemas que se encargan de detectar o localizar faltas a tierra en máquinas eléctricas, por ejemplo, los sistemas mostrados en los siguientes documentos: La patente US 6794879 B2 titulada "Apparatus and method for detecting and calculating ground fault resistance" se refiere a una invención que diagnostica faltas en el devanado de campo de máquinas síncronas. Utiliza la inyección de onda cuadrada entre terminales de alimentación de la excitación, y dependiendo de la deformación de dicha onda cuadrada en el sensor emplazado aguas abajo se puede estimar la localización de la falta en el devanado inductor así como la resistencia de falta. La patente US 10429419 B2 titulada "System and method for iterative condition monitoring and fault diagnosis of electric machines" se refiere a una invención que analiza la señal de corriente de las corrientes del estator y armónicos determinados con el objetivo de detectar posibles faltas como excentricidades en las máquinas. La patente DE 102001003021 B4 titulada "Methods and apparatus for diagnosing stator windings in an electric motor se refiere a un método y sistema para el diagnóstico de faltas en estátores de máquinas eléctricas que mediante la medida de corriente y tensión y su comparación en secuencia inversa con ciertas referencias preestablecidas es capaz de detectar faltas dichos devanados. La patente ES 2454045 A1 titulada "Sistema y método de localización de defectos a tierra en devanados estatóricos de máquinas síncronas puestas a tierra mediante una impedancia de elevado valor basado en la estimación de la resistencia de defecto a baja frecuencia" se refiere a un sistema y método en el que se localizan faltas a tierra mediante la utilización de variables de una etapa de medida y la inyección de una onda de tensión de baja frecuencia entre el neutro de un generador síncrono y tierra. Finalmente, la solicitud de patente P202030371 "Sistema y método de localización de faltas a tierra en arrollamientos eléctricos" utiliza la técnica de análisis de la respuesta en frecuencia para la localización de los defectos a tierra, sin embargo en este método hay que realizar dos ensayos al devanado, inyectando por ambos extremos. Para localizar defectos y faltas en máquinas paradas u off-line, habitualmente se tiliza la técnica de análisis de respuesta en frecuencia, o FRA, especialmente en transformadores en los que se pretende localizar faltas entre espiras, o el movimiento de los arrollamientos de dichos transformadores durante el transporte o tras sobrecorrientes. Esta técnica comprende inyectar una onda de tensión sinusoidal con amplitud fija normalmente de 1 o 10 V con frecuencia variable entre 10 Hz y 20 MHz y el registro de la tensión de salida en el otro extremo del circuito a analizar en una resistencia de valor conocido. Mediante la obtención de la función de transferencia se obtienen los parámetros ganancia y fase de esta que se utilizan para los análisis de fallos. Los ensayos FRA son -habitualmente- capaces de detectar la existencia de faltas a tierra. No obstante, es mucho menos frecuente que dichos ensayos permitan obtener la localización de las dichas faltas. A continuación se muestran varias formas de detectar defectos con esta técnica: En el artículo "Y. Liu et al., "A study of the sweep frequency impedance method and its application in the detection of internal winding short circuit faults in power transformers, " in IEEE Transactions on Dielectrics and Electrical Insulation, vol. 22, no. 4, pp. 2046-2056, August 2015" se divulga un método de análisis mediante la técnica FRA centrado en el análisis de su impedancia (SFI) . Observando fluctuaciones en la amplitud de ganancia del sistema, este detecta y cuantifica posibles faltas entre espiras en transformadores, pero sin referirse a la localización de estas. En el artículo "J. Nosratian Ahour, S. Seyedtabaii and G. B. Gharehpetian, "Determination and localisation of turn-to-turn fault in transformer winding using frequency response analysis, " in IET Science, Measurement & Technology, vol. 12, no. 3, pp. 291-300, 5 2018." La invención se refiere a un método para la detección y localización de faltas entre espiras con el mismo sistema FRA. Este método se basa en la comparación de patrones calculados mediante un modelo matemático y la ganancia FRA obtenida en el ensayo directo al transformador. A diferencia del método anterior, este es capaz de estimar la localización de la falta por secciones del devanado. Otras técnicas de diagnóstico de faltas en sistemas con devanados están ligadas a la inteligencia artificial (IA) y al aprendizaje de la propia IA con el tiempo en el ajuste de modelos que después se utilizan para contrastar con los diagnósticos FRA recogidos de los equipos. En el artículo "V. Nurmanova, M. Bagheri, A. Zollanvari, K. Aliakhmet, Y. Akhmetov and G. B. Gharehpetian, "A New Transformer FRA Measurement Technique to Reach Smart Interpretation for Inter-Disk Faults, " in IEEE Transactions on Power Deliver y , vol. 34, no. 4, pp. 1508-1519, Aug. 2019." esta técnica se utiliza para sistemas con faltas entre espiras o entre discos de devanados para transformadores eléctricos. Finalmente, en el artículo "A. Mugarra, C. A. Platero, J. A. Martínez and U. Albizuri-Txurruka, "Validity of Frequency Response Analysis (FRA) for Diagnosing Large Salient Poles of Synchronous Machines, " in IEEE Transactions on Industr y Applications, vol. 56, no. 1, pp. 226-234, Jan.-Feb. 2020." se trata el FRA para faltas entre espiras, así como para faltas a tierra. Sin embargo, no se procede a la localización de ningún tipo de ellas, pero si a su detección mediante la observación de la frecuencia de resonancia del sistema ensayado. Viendo el estado de la técnica se concluye en que es necesario establecer nuevos sistemas y métodos de análisis FRA para la localización de faltas a tierra en máquinas eléctricas de tal forma que hagan de esta un proceso sencillo de ejecutar y fácil de interpretar. Además, sería ventajoso que dichos sistemas y métodos de localización de faltas a tierra de permitiesen obtener la localización (n) y la magnitud del defecto en valores óhmicos de resistencia de defecto (Rf) . DESCRIPCIÓN DE LA INVENCIÓN La presente invención pretende abordar todas las desventajas e inconvenientes del estado de la técnica anterior. Para ello, la invención contempla un sistema y un método de localización de faltas a tierra en devanados de máquinas eléctricas basados en la técnica de análisis de respuesta en frecuencia del circuito de la máquina. Más en articular, un primer objeto de la invención se refiere a un método de localización de faltas a tierra en devanados de máquinas eléctricas, del tipo asado en análisis de respuesta en frecuencia, caracterizado porque comprende -al menos- las siguientes etapas: a) inyectar señales eléctricas de frecuencia variable y amplitud constante por un borne del devanado en falta de la maquina eléctrica y medir en el borne contrario de dicho devanado -al menos- la ganancia, fase y frecuencia correspondiente; b) calcular las funciones de transferencia de fase y ganancia en función de las medidas de ganancia, fase y frecuencia obtenidas en la etapa anterior; c) obtener la frecuencia de resonancia (fR) para el devanado en falta; d) obtener la ganancia A (fR) correspondiente a la frecuencia de resonancia (fR) del devanado en falta; e) obtener una curva de corte de frecuencia de resonancia a partir de una base de datos que comprende emulaciones de faltas a distintas resistencias de falta (Rf) y en distintas espiras para un devanado tipo, siendo (n) el número de espira en falta, determinando para ello la frecuencia de resonancia del devanado en falta mediante la casación de un plano paralelo a los ejes Rf y n, de tal forma que f R = cte, obteniendo una curva bidimensional -que depende exclusivamente de los parámetros Rf y n- producida por el corte entre dicho plano (fR=cte) y la curva de corte de frecuencia de resonancia -en tres dimensiones- de la base de datos; f) obtener una curva de corte de ganancia constante a partir de una base de datos que comprende valores de anteriores ensayos de faltas a distintas resistencias de falta y en distintas espiras para un devanado tipo, determinando para ello la ganancia para la frecuencia de resonancia del devanado en falta mediante la casación de un plano paralelo a los ejes Rf y n de tal forma que A (fR) = c t e, obteniendo una curva bidimensional -que depende exclusivamente de los parámetros Rf y n, producida por el corte entre dicho plano (A (fR) =cte) y la curva de corte de ganancia constante -en tres dimensiones- de la base de datos; g) determinar el número de espira en falta (n) y la resistencia de defecto (Rf) del devanado en falta de la maquina eléctrica como el punto de corte entre la curva de corte de frecuencia de resonancia y la curva de corte de ganancia constante; y h) emitir la información de falta una vez recopiladas las señales de numero de espira en falta y resistencia de falta a un dispositivo de monitoreo externo o relé de protección. En una realización preferida de la invención, en la etapa c) arriba indicada, la frecuencia la frecuencia de resonancia fR es el valor de frecuencia para el cual la respuesta en frecuencia de la fase del devanado es nula (en otras palabras, cuando el circuito eléctrico es puramente resistivo) . En una realización preferida de la invención, en la etapa e) arriba indicada, las emulaciones de faltas son funciones del tipo superficie espacial que dependen del número de espira en falta (n) , de la resistencia de defecto (Rf ) y de la frecuencia de resonancia (fR) . En una realización preferida de la invención, en la etapa f) arriba indicada, los valores de anteriores ensayos de faltas son funciones del tipo superficie espacial que dependen del número de espira en falta (n) , de la resistencia de defecto, (Rf) y de la ganancia asignada a frecuencia de resonancia, A (fR) . Un segundo aspecto de la invención se refiere a un sistema de localización de faltas a tierra en devanados de máquinas eléctricas, del tipo basado en análisis de respuesta en frecuencia, provisto de: - un dispositivo de inyección de tensión a frecuencia variable y amplitud constante entre un borne del devanado en falta y una referencia a tierra; - una impedancia de medida calibrada, conectada entre el otro borne del devanado en falta y una referencia a tierra; - un medidor de salida configurado para medir entre los bornes de la impedancia de medida calibrada, determinar la ganancia y fase del devanado en función de la frecuencia de inyección y enviar dicha información a un receptor; caracterizado porque está provisto además de un dispositivo de localización de faltas a tierra que comprende -al menos- los siguientes elementos: - un receptor, configurado para recibir las medidas de frecuencia, fase y ganancia obtenidas por el medidor de salida; - medios constructores de funciones de transferencia de fase y ganancia, configurados para calcular la función de transferencia de fase y ganancia a partir de las medidas de frecuencia, fase y ganancia del medidor de salida; - medios calculadores de la frecuencia de resonancia y ganancia, configurados para calcular la frecuencia de resonancia fR y la ganancia a dicha frecuencia de resonancia A (fR) del devanado en falta, a partir de las medidas de frecuencia, fase y ganancia del medidor de salida; - un dispositivo de almacenamiento de bases de datos de ensayos previos de faltas en un devanado tipo, en los que se han emulado faltas en distintas espiras y con distintas resistencias de falta, estando las bases de datos configuradas para proporcionar el número de espira (n) de la falta a tierra a partir de la frecuencia de resonancia y ganancia para dicha frecuencia de resonancia; - medios calculadores de curvas de corte, configurados para calcular una curva de corte de frecuencia de resonancia y una curva de corte de ganancia constante a partir de los valores de frecuencia de resonancia y ganancia del devanado ensayado incluidos en la base de datos; - un localizador de faltas, configurado para hallar el punto de corte de las curvas obtenidas por los medios calculadores de curvas, siendo dicho punto de corte una función del número de espira (n) de la falta y de la resistencia de falta (Rf) ; y - un elemento emisor de información configurado para enviar el número de espira (n) de la falta y la resistencia de falta (Rf) , obtenidas por el localizador de faltas. En una realización preferida de la invención, las bases de datos de ensayos previos de emulaciones de faltas en forma de funciones del tipo superficie espacial que dependen del número de espira en falta (n) , de la resistencia de defecto (Rf ) y de la frecuencia de resonancia (fR) . BREVE DESCRIPICIÓN DE LAS FIGURAS A continuación, se describen de manera muy breve una serie de dibujos que ayudan a comprender mejor la invención, que se relacionan expresamente con una realización de dicha invención y se presentan como unos ejemplos no limitativos de ésta. La figura 1 es un esquema de conexiones del sistema de análisis de respuesta en frecuencia (FRA) del devanado a ensayar y del sistema de localización de faltas a tierra; La figura 2 es un diagrama de bloques del sistema de localización de faltas a tierra según la presente invención; La figura 3 es una diagrama de flujo del método de localización de faltas de la invención; y La figura 4 es una representación gráfica de las superficies y curvas que se utilizan para la localización de faltas a tierra en la presente invención. REFERENCIAS NUMÉRICAS DE LAS FIGURAS (1) Borne de inyección de tensión. (2) Borne de medida de tensión de salida; (3) Devanado; (4) Falta a tierra; (5) Dispositivo de inyección de señales eléctricas a frecuencia variable y amplitud constante; (6) Impedancia de medida; (7) Medidor de salida; (8) Referencia a tierra; (9) Medidas recogidas; (10) Equipo de ensayos de análisis de respuesta en frecuencia (FRA) ; (11) Dispositivo de localización de faltas a tierra; (12) Señal de ganancia del devanado; (13) Señal de fase del devanado; (14) Señal de frecuencia; (15) Respuesta en frecuencia de la fase del devanado; (16) Respuesta en frecuencia de la ganancia del devanado; (17) Frecuencia de resonancia; (18) Ganancia para la frecuencia de resonancia; (19) Etapa de obtención de la curva de corte de frecuencia de resonancia a partir de una base de datos previamente almacenada para máquinas o devanados similares; (20) Etapa de obtención de la curva de corte de ganancia constante a partir de una base de datos previamente almacenada para máquinas o devanados similares; (21) Base de datos; (21.a) Superficie de faltas para frecuencias de resonancia; (21.b) Superficie de faltas para ganancias a frecuencia de resonancia; (22) Casación de las curvas de corte de fase y ganancia; (23) Señal de espira en falta; (24) Señal de resistencia de falta; (25) Etapa de emisión de información de falta; (26) Etapa de obtención de la frecuencia de resonancia; (27) Etapa de obtención de la ganancia a frecuencia de resonancia; (28) Curva de corte a frecuencia de resonancia (29) Curva de corte ganancia constante; (30) Eje-Z en frecuencia; (31) Eje-Z en ganancia. DESCRIPCIÓN DETALLADA DE LAS FIGURAS La presente invención se refiere a un sistema y método de localización de faltas a tierra en devanados de máquinas eléctricas capaz de localizar dichas faltas indicando el número de espira y resistencia de defecto entre dicha espira y tierra mediante el análisis de respuesta en frecuencia de un dispositivo FRA con un barrido en frecuencias que es práctica habitual que esté entre 10 Hz y 20 MHz, lo que es considerado suficiente para la obtención de datos relevantes a la localización de faltas en devanados eléctricos. En la figura 1 se puede observar el esquema de conexiones del equipo de medida FRA (10) , que permite la obtención de la función de transferencia del evanado ensayado donde se quiere localizar una falta a tierra. Dichas conexiones se producen en un devanado (3) con una falta a tierra (4) a localizar. Este dispone de un borne de inyección de tensión (1) mediante un dispositivo de inyección de tensión a frecuencia variable y amplitud constante (5) y un borne de medida de tensión de salida (2) conectada a una impedancia de medida (6) del equipo donde con un medidor de tensión de salida (7) , conectado entre dicho borne (2) y la referencia a tierra (8) del equipo FRA (10) , permite al menos la obtención de medidas (9) de ganancia y fase en función de la frecuencia de inyección. Dichas medidas son volcadas posteriormente a un dispositivo de localización de faltas a tierra (11) . En la figura 2 se muestra el diagrama de bloques del dispositivo de localización de faltas a tierra (11) . Primeramente, se recopilan las medidas recogidas (9) que han de ser al menos la señal de ganancia del devanado (12) , la señal de fase del devanado (13) y la señal de frecuencia (14) . Mediante estos datos recogidos por el equipo de medida FRA (10) se procede a la construcción de las funciones de transferencia de respuesta en frecuencia de la fase del devanado (15) y de respuesta en frecuencia de la ganancia del devanado (16) . El sistema y método contemplan el cálculo (17) de la frecuencia de resonancia del devanado (3) obteniendo el valor de frecuencia para el cual la respuesta en frecuencia de la fase del devanado (15) es nula. Posteriormente, con dicho valor de frecuencia de resonancia, fR, el sistema y método considera la utilización de dicho parámetro para la obtención (18) del valor de ganancia para la frecuencia de resonancia (18) introduciendo dicho valor de fR en la respuesta en frecuencia de la ganancia del devanado (16) . Una vez obtenidos ambos valores, la invención contempla la casación de dichos valores con una base de datos (21) , que dispone de superficies construidas mediante ensayos previos de laboratorio a devanados semejantes con faltas a tierra realizadas en diversos puntos con diversas resistencias de defecto, habiendo para ello construido funciones del tipo: fR = u (n, R f) M.fR) = v (n, Rf ) Donde: n: número de espira en falta. Rf: resistencia de falta. fR: frecuencia de resonancia. A (fR) : es la ganancia del sistema a frecuencia de resonancia de la falta. u y v son funciones generalizadas que dependerán del devanado ensayado. De esta forma que se disponen de dos superficies distintas: Una superficie para frecuencias de resonancia (17) proveniente de ensayos previos con faltas en distinta posición, es decir en distinto número de espira y resistencia de defecto, obtenido de la respuesta en frecuencia de la fase del devanado (15) . Y la otra superficie para ganancias a dicha frecuencia de resonancia (18) proveniente de ensayos previos con faltas en distintas posiciones y resistencia de defecto obtenido de la respuesta en frecuencia de la ganancia del devanado (16) . Con la frecuencia de resonancia (17) y ganancia a dicha frecuencia de resonancia se procede a las etapas de obtención de la curva de corte de frecuencia de resonancia a partir de una base de datos (19) y obtención de la curva de corte de ganancia constante a partir de una base de datos (20) que proponen curvas de corte con expresiones: u (n, R f) = cte1 v (n, R f) = cte2 Donde cte1 y cte2 son constantes y vienen definidos por el valor de frecuencia de resonancia (17) y su correspondiente ganancia del sistema, obtenidas en el ensayo para la localización de la falta a tierra del devanado (3) . En la resolución del problema de la localización, la presente invención contempla la casación de las curvas de corte de fase y ganancia (22) con las superficies anteriores de tal forma que dicha casación de ambas rectas define un punto de corte donde las coordenadas del punto en un plano con "ejes X-Y" = "ejes Rr n" o viceversa son las soluciones al problema de diagnóstico de faltas a tierra. Finalmente, el sistema y método de la invención permiten la emisión de información de una señal de espira en falta (23) y una señal de resistencia de falta (24) mediante una etapa de emisión de información de falta (25) a ispositivos externos, pudiendo ser estos entre otros, equipos de monitoreo o protección eléctrica. La figura 3 muestra el diagrama de flujo del método de la invención, donde se siguen los pasos anteriormente descritos. Primero se recopilan las señales de ganancia del devanado (12) , de fase del devanado (13) y de frecuencia (14) . Se proceden a construir las correspondientes funciones de transferencia de fase (15) y ganancia (16) y a partir de la primera se obtiene la frecuencia de resonancia para: arg[H (j2nfR) \ = 0 Donde H es la función de transferencia compleja obtenida en el equipo de medida FRA (10) . Una vez obtenida la frecuencia de resonancia (17) , se obtiene de la respuesta en frecuencia en ganancia (16) dicha ganancia (18) para el determinado valor de frecuencia de resonancia de tal forma que: H (j2 n fR) = A{fR) Una vez obtenidas la frecuencia de resonancia (17) y su correspondiente ganancia (18) se cargan desde la base de datos (21) la superficie de faltas para frecuencias de resonancia (21.a) y la superficie de faltas para ganancias a frecuencia de resonancia (21.b) correspondiente a ensayos previos de un devanado semejante. Se procede entonces a la introducción de los parámetros obtenidos en dicha base de datos mediante la etapa de obtención de la curva de corte de frecuencia de resonancia a partir de una base de datos (19) y la etapa de obtención de la curva de corte de ganancia constante a partir de una base de datos (20) para obtener las líneas que posteriormente se cortarán en un plano 2D donde cuyos ejes serán la resistencia de defecto, Rf, y el número de espira en falta, n. Introduciendo la curva de corte a frecuencia de resonancia (28) y curva de corte ganancia constante (29) en un plano 2D cuyos ejes serán la resistencia de defecto, Rf, y el número de espira en falta, n, se produce una casación de las curvas de corte (22) y se obtiene un punto de corte entre ellas donde la solución en resistencia de defecto (24) y numero de espira (23) en falta corresponde a la everidad de la falta y localización de la misma respectivamente. Finalmente, el método contempla la emisión de estos parámetros a otros dispositivos mediante una etapa de emisión de información de falta (25) . A modo de ejemplo representativo y no limitativo de la invención, la figura 4 muestra las superficies cargadas desde la base de datos para frecuencias de resonancia (21.a) y ganancia en dichas frecuencias de resonancia (21.b) en ejes tridimensionales. Los ejes de estas superficies son la resistencia de defecto (24) y el número de espiras (23) , como ejes X e Y y el Eje-Z en frecuencia (30) y la resistencia de defecto (24) y el número de espiras (23) como ejes X e Y y el Eje-Z en ganancia (31) respectivamente. Finalmente, procediendo al corte de la superficie referente a frecuencias de resonancia (21.a) con la frecuencia de resonancia (17) de la falta y al corte de la superficie referente a las ganancias a frecuencia de resonancia (21.b) con su respectiva ganancia (18) , se obtiene un plano bidimensional donde la casación de las curvas de corte previas (28 y 29) se cortan a su vez y permiten la obtención de la espira en falta, n, y la resistencia de defecto, Rf. El sistema y método de la invención pretende abordar las desventajas e inconvenientes presentados en el estado de la técnica proponiendo una forma de localización de faltas a tierra en el que se especifica la espira de defecto y la resistencia de defecto en dicho punto de una forma sencilla y rápida.
Publicaciones:
ES2848598 (10/08/2021) - A1 Solicitud de patente con informe sobre el estado de la técnica
ES2848598 (21/02/2022) - B2 Patente de invención con examen
Eventos:
En fecha 30/12/2020 se realizó Registro Instancia de Solicitud
En fecha 30/12/2020 se realizó PETEX_Petición de examen sustantivo
En fecha 04/01/2021 se realizó Admisión a Trámite
En fecha 04/01/2021 se realizó Aceptación Tramitación CAP
En fecha 04/01/2021 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 08/01/2021 se realizó Superado examen de oficio
En fecha 20/07/2021 se realizó 3411X_Alta Mandatarios
En fecha 22/07/2021 se realizó Alta mandatario
En fecha 29/07/2021 se realizó Realizado IET
En fecha 03/08/2021 se realizó 1109P_Comunicación Traslado del IET
En fecha 10/08/2021 se realizó Publicación Solicitud
En fecha 10/08/2021 se realizó Publicación Folleto Solicitud con IET (A1)
En fecha 04/11/2021 se realizó 5215P_Observaciones del solicitante al IET, Opinión Escrita y/o alegaciones a observaciones de terceros
En fecha 10/11/2021 se realizó Validación petición y/o pago de examen sustantivo conforme
En fecha 01/02/2022 se realizó Designación de Comisión de Expertos
En fecha 04/02/2022 se realizó Finalización de Examen Sustantivo
En fecha 04/02/2022 se realizó 6121P_Comunicación finalización de examen sustantivo
En fecha 10/02/2022 se realizó Publicación finalización de examen sustantivo
En fecha 14/02/2022 se realizó Concesión con examen sustantivo
En fecha 14/02/2022 se realizó Entrega título
En fecha 14/02/2022 se realizó 6125P_Notificación de concesión con examen sustantivo
En fecha 21/02/2022 se realizó Publicación concesión Patente
En fecha 21/02/2022 se realizó Publicación Folleto Concesión
En fecha 22/08/2022 se realizó Plazo expirado presentación de oposiciones contra la concesión de la Patente
Pagos:
30/12/2020 - Pago Tasas IET
17/01/2023 - Pago 03 Anualidad
04/01/2024 - Pago 04 Anualidad
+ ES-2848598_B21.- Método de localización de faltas a tierra (4) en devanados (3) de máquinaseléctricas, del tipo basado en análisis de respuesta en frecuencia, caracterizado porque comprende -al menos- las siguientes etapas: - inyectar señales eléctricas de frecuencia variable y amplitud constante por un borne (1) del devanado (3) en falta de la maquina eléctrica y medir (9) en el borne contrario (2) de dicho devanado -al menos- la ganancia (12) , fase (13) y frecuencia (14) correspondiente; - calcular las funciones de transferencia de fase (15) y ganancia (16) en función de las medidas (9) de ganancia (12) , fase (13) y frecuencia (14) obtenidas en la etapa anterior; - obtener (17) la frecuencia de resonancia (fR) para el devanado en falta; - obtener (18) la ganancia A (fR) correspondiente a la frecuencia de resonancia (fR) del devanado en falta; - obtener una curva de corte de frecuencia de resonancia (19) a partir de una base de datos que comprende emulaciones de faltas a distintas resistencias de falta (Rf) y en distintas espiras para un devanado tipo, siendo (n) el número de espira en falta, determinando para ello la frecuencia de resonancia del devanado en falta mediante la casación de un plano paralelo a los ejes Rf y n, de tal forma que fR = cte, obteniendo una curva bidimensional (21a) que depende exclusivamente de los parámetros Rf y n, producida por el corte entre dicho plano (fR=cte) y la curva de corte de frecuencia de resonancia -en tres dimensiones- de la base de datos; - obtener una curva de corte de ganancia constante (20) a partir de una base de datos que comprende valores de anteriores ensayos de faltas a distintas resistencias de falta y en distintas espiras para un devanado tipo, determinando para ello la ganancia para la frecuencia de resonanciadel devanado en falta mediante la casación de un plano paralelo a losejes Rf y n de tal forma que A (fR) = cte obteniendo una curvabidimensional (21b) que depende exclusivamente de los parámetros Rf y n, producida or el corte entre dicho plano (A (fR) =cte) y la curva de corte de ganancia constante -en tres dimensiones- de la base de datos; - determinar (23) el número de espira en falta (n) y (24) la resistencia de defecto (Rf) del devanado en falta de la maquina eléctrica como el punto de corte entre la curva de corte de frecuencia de resonancia y la curva de corte de ganancia constante; y - emitir (25) la información de falta una vez recopiladas las señales de numero de espira en falta (n) y resistencia de falta (Rf) a un dispositivo de monitoreo externo o relé de protección. 2.- Método de localización de faltas a tierra según la reivindicación 1, en el que en la etapa (17) arriba indicada, la frecuencia la frecuencia de resonancia (fR) es el valor de frecuencia para el cual la respuesta en frecuencia de la fase del devanado (3) es nula. 3.- Método de localización de faltas a tierra según cualquiera de las reivindicaciones anteriores, en el que en la etapa (19) arriba indicada, las emulaciones de faltas son funciones del tipo superficie espacial que dependen del número de espira en falta (n) , de la resistencia de defecto (Rf ) y de la frecuencia de resonancia (fR) . 4.- Método de localización de faltas a tierra según cualquiera de las reivindicaciones anteriores, en el que en la etapa (20) arriba indicada, los valoresde anteriores ensayos de faltas son funciones del tipo superficie espacial que dependen del número de espira en falta (n) , de la resistencia de defecto, (Rf) y de la ganancia asignada a frecuencia de resonancia, A (fR) . 5.- Sistema de localización de faltas a tierra (4) en devanados (3) de máquinaseléctricas, del tipo basado en análisis de respuesta en frecuencia, provisto de: - un dispositivo (5) de inyección de tensión a frecuencia variable y amplitud constante entre un borne del devanado en falta y una referencia a tierra; - una impedancia (6) de medida calibrada, conectada entre el otro borne del devanado en falta y una referencia a tierra (8) ; - un medidor (7) de salida configurado para medir entre los bornes de la impedancia de medida calibrada, determinar la ganancia (12) y fase (13) del devanado (3) en función de la frecuencia (14) de inyección y enviar icha información a un receptor; en donde está provisto además de un dispositivo (11) de localización de faltas a tierra que comprende -al menos- los siguientes elementos: - un receptor, configurado para recibir las medidas de frecuencia (14) , fase (13) y ganancia (12) obtenidas por el medidor (7) de salida; - medios constructores de funciones de transferencia de fase y ganancia, configurados para calcular la función de transferencia de fase y ganancia a partir de las medidas de frecuencia (14) , fase (13) y ganancia (12) obtenidas por el medidor (7) de salida; el dispositivo (11) de localización de faltas a tierra caracterizado porque comprende: - medios calculadores de la frecuencia de resonancia y ganancia, configurados para calcular la frecuencia de resonancia fR y la ganancia a dicha frecuencia de resonancia A (fR) del devanado en falta, a partir de las medidas frecuencia (14) , fase (13) y ganancia (12) obtenidas por elmedidor (7) de salida; - un dispositivo de almacenamiento de bases de datos de ensayos previos de faltas en un devanado tipo, en los que se han emulado faltas en distintas espiras y con distintas resistencias de falta, configuradas para proporcionar el número de espira (n) de la falta a tierra a partir de la frecuencia de resonancia fR y ganancia A (fR) para dicha frecuencia de resonancia; - medios calculadores de curvas de corte, configurados para calcular una curva de corte de frecuencia de resonancia y una curva de corte de ganancia constante a partir de los valores de frecuencia de resonancia y ganancia del devanado ensayado incluidos en la base de datos; - un localizador de faltas, configurado para hallar el punto de corte de las curvas obtenidas por los medios calculadores de curvas, siendo dicho punto de corte una función del número de espira (n) de la falta y de la resistencia de falta (Rf) ; y - un elemento emisor de información configurado para enviar el número de espira (n) de la falta y la resistencia de falta (Rf) , obtenidas por el localizador de faltas. 6.- Sistema de localización de faltas a tierra según la reivindicación 5, en el que las bases de datos de ensayos previos de emulaciones de faltas en forma de funciones del tipo superficie espacial que dependen del número de espira en falta (n) , de la resistencia de defecto (Rf ) y de la frecuencia de resonancia (fR) .
+ ES-2848598_A11.- Método de localización de faltas a tierra (4) en devanados (3) de máquinas eléctricas, del tipo basado en análisis de respuesta en frecuencia, caracterizado porque comprende -al menos- las siguientes etapas: - inyectar señales eléctricas de frecuencia variable y amplitud constante por un borne (1) del devanado (3) en falta de la maquina eléctrica y medir (9) en el borne contrario (2) de dicho devanado -al menos- la ganancia (12) , fase (13) y frecuencia (14) correspondiente; - calcular las funciones de transferencia de fase (15) y ganancia (16) en función de las medidas (9) de ganancia (12) , fase (13) y frecuencia (14) obtenidas en la etapa anterior; - obtener (17) la frecuencia de resonancia (fR) para el devanado en falta; - obtener (18) la ganancia A (fR) correspondiente a la frecuencia de resonancia (fR) del devanado en falta; - obtener una curva de corte de frecuencia de resonancia (19) a partir de una base de datos que comprende emulaciones de faltas a distintas resistencias de falta (Rf) y en distintas espiras para un devanado tipo, siendo (n) el número de espira en falta, determinando para ello la frecuencia de resonancia del devanado en falta mediante la casación de un plano paralelo a los ejes Rf y n, de tal forma que f R = cte, obteniendo una curva bidimensional (21a) que depende exclusivamente de los parámetros Rf y n, producida por el corte entre dicho plano (fR=cte) y la curva de corte de frecuencia de resonancia -en tres dimensiones- de la base de datos; - obtener una curva de corte de ganancia constante (20) a partir de una base de datos que comprende valores de anteriores ensayos de faltas a distintas resistencias de falta y en distintas espiras para un devanado tipo, determinando para ello la ganancia para la frecuencia de resonancia del devanado en falta mediante la casación de un plano paralelo a los ejes Rf y n de tal forma que A (fR) = c t e, obteniendo una curva bidimensional (21b) que depende exclusivamente de los parámetros Rf y n, producida por el corte entre dicho plano (A (fR) =cte) y la curva de corte de ganancia constante -en tres dimensiones- de la base de datos; - determinar (23) el número de espira en falta (n) y (24) la resistencia de defecto (Rf) del devanado en falta de la maquina eléctrica como el punto de corte entre la curva de corte de frecuencia de resonancia y la curva de corte de ganancia constante; y - emitir (25) la información de falta una vez recopiladas las señales de numero de espira en falta (n) y resistencia de falta (Rf) a un dispositivo de monitoreo externo o relé de protección. 2.- Método de localización de faltas a tierra según la reivindicación 1, en el que en la etapa (17) arriba indicada, la frecuencia la frecuencia de resonancia (fR) es el valor de frecuencia para el cual la respuesta en frecuencia de la fase del devanado (3) es nula. 3.- Método de localización de faltas a tierra según cualquiera de las reivindicaciones anteriores, en el que en la etapa (19) arriba indicada, las emulaciones de faltas son funciones del tipo superficie espacial que dependen del número de espira en falta (n) , de la resistencia de defecto (Rf ) y de la frecuencia de resonancia (fR) . 4.- Método de localización de faltas a tierra según cualquiera de las reivindicaciones anteriores, en el que en la etapa (20) arriba indicada, los valores de anteriores ensayos de faltas son funciones del tipo superficie espacial que dependen del número de espira en falta (n) , de la resistencia de defecto, (Rf) y de la ganancia asignada a frecuencia de resonancia, A (fR) . 5.- Sistema de localización de faltas a tierra (4) en devanados (3) de máquinas eléctricas, del tipo basado en análisis de respuesta en frecuencia, provisto de: - un dispositivo (5) de inyección de tensión a frecuencia variable y amplitud constante entre un borne del devanado en falta y una referencia a tierra; - una impedancia (6) de medida calibrada, conectada entre el otro borne del devanado en falta y una referencia a tierra (8) ; - un medidor (7) de salida configurado para medir entre los bornes de la impedancia de medida calibrada, determinar la ganancia (12) y fase (13) del devanado (3) en función de la frecuencia (14) de inyección y enviar icha información a un receptor; caracterizado porque está provisto además de un dispositivo (11) de localización de faltas a tierra que comprende -al menos- los siguientes elementos: - un receptor, configurado para recibir las medidas de frecuencia (14) , fase (13) y ganancia (12) obtenidas por el medidor (7) de salida; - medios constructores de funciones de transferencia de fase y ganancia, configurados para calcular la función de transferencia de fase y ganancia a partir de las medidas de frecuencia (14) , fase (13) y ganancia (12) obtenidas por el medidor (7) de salida; - medios calculadores de la frecuencia de resonancia y ganancia, configurados para calcular la frecuencia de resonancia fR y la ganancia a dicha frecuencia de resonancia A (fR) del devanado en falta, a partir de las medidas frecuencia (14) , fase (13) y ganancia (12) obtenidas por el medidor (7) de salida; - un dispositivo de almacenamiento de bases de datos de ensayos previos de faltas en un devanado tipo, en los que se han emulado faltas en distintas espiras y con distintas resistencias de falta, configuradas para proporcionar el número de espira (n) de la falta a tierra a partir de la frecuencia de resonancia fR y ganancia A (fR) para dicha frecuencia de resonancia; - medios calculadores de curvas de corte, configurados para calcular una curva de corte de frecuencia de resonancia y una curva de corte de ganancia constante a partir de los valores de frecuencia de resonancia y ganancia del devanado ensayado incluidos en la base de datos; - un localizador de faltas, configurado para hallar el punto de corte de las curvas obtenidas por los medios calculadores de curvas, siendo dicho punto de corte una función del número de espira (n) de la falta y de la resistencia de falta (Rf) ; y - un elemento emisor de información configurado para enviar el número de espira (n) de la falta y la resistencia de falta (Rf) , obtenidas por el localizador de faltas. 6.- Sistema de localización de faltas a tierra según la reivindicación 5, en el que as bases de datos de ensayos previos de emulaciones de faltas en forma de funciones del tipo superficie espacial que dependen del número de espira en falta (n) , de la resistencia de defecto (Rf ) y de la frecuencia de resonancia (fR) .
Los productos y servicios protegidos por este registro son:
G01R 31/72 - G01R 31/52
Descripciones:
+ ES-2848598_B2 SISTEMA Y MÉTODO DE LOCALIZACIÓN DE FALTAS A TIERRA EN DEVANADOS DE MÁQUINAS ELÉCTRICAS OBJETO DE LA INVENCIÓN La presente invención se refiere a un método y sistema de localización de faltas a tierra en devanados de máquinas eléctricas capaz de localizar este tipo de falta estando en cualquier punto del circuito eléctrico, con este desconectado de la red eléctrica. El método y sistema de localización de faltas a tierra en arrollamientos eléctricos según la presente invención es de utilidad para el mantenimiento, principalmente correctivo, de máquinas eléctricas pudiendo ser también de aplicación en el mantenimiento predictivo gracias a que dicho sistema permite la obtención de la resistencia de defecto de una posible falta en el sistema eléctrico, así como el número de espira donde se encuentra dicho defecto. ANTECEDENTES DE LA INVENCIÓN A lo largo de la vida útil de las máquinas eléctricas uno de los fallos más comunes que puede experimentar dicha maquinaria es la aparición de faltas a tierra. Estas faltas ponen en riesgo la integridad de las máquinas y pueden afectar directamente a una alteración en su funcionamiento o provocar daños severos en máquinas adyacentes o en la salud de trabajadores cercanos. El campo del diagnóstico se encarga entonces de detectar y localizar estas faltas para evitar que aparezcan este tipo de defectos entre otros o en su defecto para proceder a una rápida protección del sistema eléctrico en cuestión. Son muchos los sistemas que se encargan de detectar o localizar faltas a tierra en máquinas eléctricas, por ejemplo, los sistemas mostrados en los siguientes documentos: La patente US 6794879 B2 titulada "Apparatus and method for detecting and calculating ground fault resistance" se refiere a una invención que diagnostica faltas en el devanado de campo de máquinas síncronas. Utiliza la inyección de onda cuadrada entre terminales de alimentación de la excitación, y dependiendo de la deformación de dicha onda cuadrada en el sensor emplazado aguas abajo se puede estimar la localización de la falta en el devanado inductor así como la resistencia de falta. La patente US 10429419 B2 titulada "System and method for iterative condition monitoring and fault diagnosis of electric machines" se refiere a una invención que analiza la señal de corriente de las corrientes del estator y armónicos determinados con el objetivo de detectar posibles faltas como excentricidades en las máquinas. La patente DE 102001003021 B4 titulada "Methods and apparatus for diagnosing stator windings in an electric motor se refiere a un método y sistema para el diagnóstico de faltas en estátores de máquinas eléctricas que mediante la medida de corriente y tensión y su comparación en secuencia inversa con ciertas referencias preestablecidas es capaz de detectar faltas dichos devanados. La patente ES 2454045 A1 titulada "Sistema y método de localización de defectos a tierra en devanados estatóricos de máquinas síncronas puestas a tierra mediante una impedancia de elevado valor basado en la estimación de la resistencia de defecto a baja frecuencia" se refiere a un sistema y método en el que se localizan faltas a tierra mediante la utilización de variables de una etapa de medida y la inyección de una onda de tensión de baja frecuencia entre el neutro de un generador síncrono y tierra. Finalmente, la solicitud de patente P202030371 "Sistema y método de localización de faltas a tierra en arrollamientos eléctricos" utiliza la técnica de análisis de la respuesta en frecuencia para la localización de los defectos a tierra, sin embargo en este método hay que realizar dos ensayos al devanado, inyectando por ambos extremos. Para localizar defectos y faltas en máquinas paradas u off-line, habitualmente se tiliza la técnica de análisis de respuesta en frecuencia, o FRA, especialmente en transformadores en los que se pretende localizar faltas entre espiras, o el movimiento de los arrollamientos de dichos transformadores durante el transporte o tras sobrecorrientes. Esta técnica comprende inyectar una onda de tensión sinusoidal con amplitud fija normalmente de 1 o 10 V con frecuencia variable entre 10 Hz y 20 MHz y el registro de la tensión de salida en el otro extremo del circuito a analizar en una resistencia de valor conocido. Mediante la obtención de la función de transferencia se obtienen los parámetros ganancia y fase de esta que se utilizan para los análisis de fallos. Los ensayos FRA son -habitualmente- capaces de detectar la existencia de faltas a tierra. No obstante, es mucho menos frecuente que dichos ensayos permitan obtener la localización de las dichas faltas. A continuación se muestran varias formas de detectar defectos con esta técnica: En el artículo "Y. Liu et al., "A study of the sweep frequency impedance method and its application in the detection of internal winding short circuit faults in power transformers, " in IEEE Transactions on Dielectrics and Electrical Insulation, vol. 22, no. 4, pp. 2046-2056, August 2015" se divulga un método de análisis mediante la técnica FRA centrado en el análisis de su impedancia (SFI) . Observando fluctuaciones en la amplitud de ganancia del sistema, este detecta y cuantifica posibles faltas entre espiras en transformadores, pero sin referirse a la localización de estas. En el artículo "J. Nosratian Ahour, S. Seyedtabaii and G. B. Gharehpetian, "Determination and localisation of turn-to-turn fault in transformer winding using frequency response analysis, " in IET Science, Measurement & Technology, vol. 12, no. 3, pp. 291-300, 5 2018." La invención se refiere a un método para la detección y localización de faltas entre espiras con el mismo sistema FRA. Este método se basa en la comparación de patrones calculados mediante un modelo matemático y la ganancia FRA obtenida en el ensayo directo al transformador. A diferencia del método anterior, este es capaz de estimar la localización de la falta por secciones del devanado. Otras técnicas de diagnóstico de faltas en sistemas con devanados están ligadas a la inteligencia artificial (IA) y al aprendizaje de la propia IA con el tiempo en el ajuste de modelos que después se utilizan para contrastar con los diagnósticos FRA recogidos de los equipos. En el artículo "V. Nurmanova, M. Bagheri, A. Zollanvari, K. Aliakhmet, Y. Akhmetov and G. B. Gharehpetian, "A New Transformer FRA Measurement Technique to Reach Smart Interpretation for Inter-Disk Faults, " in IEEE Transactions on Power Deliver y , vol. 34, no. 4, pp. 1508-1519, Aug. 2019." esta técnica se utiliza para sistemas con faltas entre espiras o entre discos de devanados para transformadores eléctricos. Finalmente, en el artículo "A. Mugarra, C. A. Platero, J. A. Martínez and U. Albizuri-Txurruka, "Validity of Frequency Response Analysis (FRA) for Diagnosing Large Salient Poles of Synchronous Machines, " in IEEE Transactions on Industr y Applications, vol. 56, no. 1, pp. 226-234, Jan.-Feb. 2020." se trata el FRA para faltas entre espiras, así como para faltas a tierra. Sin embargo, no se procede a la localización de ningún tipo de ellas, pero si a su detección mediante la observación de la frecuencia de resonancia del sistema ensayado. Viendo el estado de la técnica se concluye en que es necesario establecer nuevos sistemas y métodos de análisis FRA para la localización de faltas a tierra en máquinas eléctricas de tal forma que hagan de esta un proceso sencillo de ejecutar y fácil de interpretar. Además, sería ventajoso que dichos sistemas y métodos de localización de faltas a tierra de permitiesen obtener la localización (n) y la magnitud del defecto en valores óhmicos de resistencia de defecto (Rf) . DESCRIPCIÓN DE LA INVENCIÓN La presente invención pretende abordar todas las desventajas e inconvenientes del estado de la técnica anterior. Para ello, la invención contempla un sistema y un método de localización de faltas a tierra en devanados de máquinas eléctricas basados en la técnica de análisis de respuesta en frecuencia del circuito de la máquina. Más en articular, un primer objeto de la invención se refiere a un método de localización de faltas a tierra en devanados de máquinas eléctricas, del tipo asado en análisis de respuesta en frecuencia, caracterizado porque comprende -al menos- las siguientes etapas: a) inyectar señales eléctricas de frecuencia variable y amplitud constante por un borne del devanado en falta de la maquina eléctrica y medir en el borne contrario de dicho devanado -al menos- la ganancia, fase y frecuencia correspondiente; b) calcular las funciones de transferencia de fase y ganancia en función de las medidas de ganancia, fase y frecuencia obtenidas en la etapa anterior; c) obtener la frecuencia de resonancia (fR) para el devanado en falta; d) obtener la ganancia A (fR) correspondiente a la frecuencia de resonancia (fR) del devanado en falta; e) obtener una curva de corte de frecuencia de resonancia a partir de una base de datos que comprende emulaciones de faltas a distintas resistencias de falta (Rf) y en distintas espiras para un devanado tipo, siendo (n) el número de espira en falta, determinando para ello la frecuencia de resonancia del devanado en falta mediante la casación de un plano paralelo a los ejes Rf y n, de tal forma que f R = cte, obteniendo una curva bidimensional -que depende exclusivamente de los parámetros Rf y n- producida por el corte entre dicho plano (fR=cte) y la curva de corte de frecuencia de resonancia -en tres dimensiones- de la base de datos; f) obtener una curva de corte de ganancia constante a partir de una base de datos que comprende valores de anteriores ensayos de faltas a distintas resistencias de falta y en distintas espiras para un devanado tipo, determinando para ello la ganancia para la frecuencia de resonancia del devanado en falta mediante la casación de un plano paralelo a los ejes Rf y n de tal forma que A (fR) = c t e, obteniendo una curva bidimensional -que depende exclusivamente de los parámetros Rf y n, producida por el corte entre dicho plano (A (fR) =cte) y la curva de corte de ganancia constante -en tres dimensiones- de la base de datos; g) determinar el número de espira en falta (n) y la resistencia de defecto (Rf) del devanado en falta de la maquina eléctrica como el punto de corte entre la curva de corte de frecuencia de resonancia y la curva de corte de ganancia constante; y h) emitir la información de falta una vez recopiladas las señales de numero de espira en falta y resistencia de falta a un dispositivo de monitoreo externo o relé de protección. En una realización preferida de la invención, en la etapa c) arriba indicada, la frecuencia la frecuencia de resonancia fR es el valor de frecuencia para el cual la respuesta en frecuencia de la fase del devanado es nula (en otras palabras, cuando el circuito eléctrico es puramente resistivo) . En una realización preferida de la invención, en la etapa e) arriba indicada, las emulaciones de faltas son funciones del tipo superficie espacial que dependen del número de espira en falta (n) , de la resistencia de defecto (Rf ) y de la frecuencia de resonancia (fR) . En una realización preferida de la invención, en la etapa f) arriba indicada, los valores de anteriores ensayos de faltas son funciones del tipo superficie espacial que dependen del número de espira en falta (n) , de la resistencia de defecto, (Rf) y de la ganancia asignada a frecuencia de resonancia, A (fR) . Un segundo aspecto de la invención se refiere a un sistema de localización de faltas a tierra en devanados de máquinas eléctricas, del tipo basado en análisis de respuesta en frecuencia, provisto de: - un dispositivo de inyección de tensión a frecuencia variable y amplitud constante entre un borne del devanado en falta y una referencia a tierra; - una impedancia de medida calibrada, conectada entre el otro borne del devanado en falta y una referencia a tierra; - un medidor de salida configurado para medir entre los bornes de la impedancia de medida calibrada, determinar la ganancia y fase del devanado en función de la frecuencia de inyección y enviar dicha información a un receptor; caracterizado porque está provisto además de un dispositivo de localización de faltas a tierra que comprende -al menos- los siguientes elementos: - un receptor, configurado para recibir las medidas de frecuencia, fase y ganancia obtenidas por el medidor de salida; - medios constructores de funciones de transferencia de fase y ganancia, configurados para calcular la función de transferencia de fase y ganancia a partir de las medidas de frecuencia, fase y ganancia del medidor de salida; - medios calculadores de la frecuencia de resonancia y ganancia, configurados para calcular la frecuencia de resonancia fR y la ganancia a dicha frecuencia de resonancia A (fR) del devanado en falta, a partir de las medidas de frecuencia, fase y ganancia del medidor de salida; - un dispositivo de almacenamiento de bases de datos de ensayos previos de faltas en un devanado tipo, en los que se han emulado faltas en distintas espiras y con distintas resistencias de falta, estando las bases de datos configuradas para proporcionar el número de espira (n) de la falta a tierra a partir de la frecuencia de resonancia y ganancia para dicha frecuencia de resonancia; - medios calculadores de curvas de corte, configurados para calcular una curva de corte de frecuencia de resonancia y una curva de corte de ganancia constante a partir de los valores de frecuencia de resonancia y ganancia del devanado ensayado incluidos en la base de datos; - un localizador de faltas, configurado para hallar el punto de corte de las curvas obtenidas por los medios calculadores de curvas, siendo dicho punto de corte una función del número de espira (n) de la falta y de la resistencia de falta (Rf) ; y - un elemento emisor de información configurado para enviar el número de espira (n) de la falta y la resistencia de falta (Rf) , obtenidas por el localizador de faltas. En una realización preferida de la invención, las bases de datos de ensayos previos de emulaciones de faltas en forma de funciones del tipo superficie espacial que dependen del número de espira en falta (n) , de la resistencia de defecto (Rf ) y de la frecuencia de resonancia (fR) . BREVE DESCRIPICIÓN DE LAS FIGURAS A continuación, se describen de manera muy breve una serie de dibujos que ayudan a comprender mejor la invención, que se relacionan expresamente con una realización de dicha invención y se presentan como unos ejemplos no limitativos de ésta. La figura 1 es un esquema de conexiones del sistema de análisis de respuesta en frecuencia (FRA) del devanado a ensayar y del sistema de localización de faltas a tierra; La figura 2 es un diagrama de bloques del sistema de localización de faltas a tierra según la presente invención; La figura 3 es una diagrama de flujo del método de localización de faltas de la invención; y La figura 4 es una representación gráfica de las superficies y curvas que se utilizan para la localización de faltas a tierra en la presente invención. REFERENCIAS NUMÉRICAS DE LAS FIGURAS (1) Borne de inyección de tensión. (2) Borne de medida de tensión de salida; (3) Devanado; (4) Falta a tierra; (5) Dispositivo de inyección de señales eléctricas a frecuencia variable y amplitud constante; (6) Impedancia de medida; (7) Medidor de salida; (8) Referencia a tierra; (9) Medidas recogidas; (10) Equipo de ensayos de análisis de respuesta en frecuencia (FRA) ; (11) Dispositivo de localización de faltas a tierra; (12) Señal de ganancia del devanado; (13) Señal de fase del devanado; (14) Señal de frecuencia; (15) Respuesta en frecuencia de la fase del devanado; (16) Respuesta en frecuencia de la ganancia del devanado; (17) Frecuencia de resonancia; (18) Ganancia para la frecuencia de resonancia; (19) Etapa de obtención de la curva de corte de frecuencia de resonancia a partir de una base de datos previamente almacenada para máquinas o devanados similares; (20) Etapa de obtención de la curva de corte de ganancia constante a partir de una base de datos previamente almacenada para máquinas o devanados similares; (21) Base de datos; (21.a) Superficie de faltas para frecuencias de resonancia; (21.b) Superficie de faltas para ganancias a frecuencia de resonancia; (22) Casación de las curvas de corte de fase y ganancia; (23) Señal de espira en falta; (24) Señal de resistencia de falta; (25) Etapa de emisión de información de falta; (26) Etapa de obtención de la frecuencia de resonancia; (27) Etapa de obtención de la ganancia a frecuencia de resonancia; (28) Curva de corte a frecuencia de resonancia (29) Curva de corte ganancia constante; (30) Eje-Z en frecuencia; (31) Eje-Z en ganancia. DESCRIPCIÓN DETALLADA DE LAS FIGURAS La presente invención se refiere a un sistema y método de localización de faltas a tierra en devanados de máquinas eléctricas capaz de localizar dichas faltas indicando el número de espira y resistencia de defecto entre dicha espira y tierra mediante el análisis de respuesta en frecuencia de un dispositivo FRA con un barrido en frecuencias que es práctica habitual que esté entre 10 Hz y 20 MHz, lo que es considerado suficiente para la obtención de datos relevantes a la localización de faltas en devanados eléctricos. En la figura 1 se puede observar el esquema de conexiones del equipo de medida FRA (10) , que permite la obtención de la función de transferencia del evanado ensayado donde se quiere localizar una falta a tierra. Dichas conexiones se producen en un devanado (3) con una falta a tierra (4) a localizar. Este dispone de un borne de inyección de tensión (1) mediante un dispositivo de inyección de tensión a frecuencia variable y amplitud constante (5) y un borne de medida de tensión de salida (2) conectada a una impedancia de medida (6) del equipo donde con un medidor de tensión de salida (7) , conectado entre dicho borne (2) y la referencia a tierra (8) del equipo FRA (10) , permite al menos la obtención de medidas (9) de ganancia y fase en función de la frecuencia de inyección. Dichas medidas son volcadas posteriormente a un dispositivo de localización de faltas a tierra (11) . En la figura 2 se muestra el diagrama de bloques del dispositivo de localización de faltas a tierra (11) . Primeramente, se recopilan las medidas recogidas (9) que han de ser al menos la señal de ganancia del devanado (12) , la señal de fase del devanado (13) y la señal de frecuencia (14) . Mediante estos datos recogidos por el equipo de medida FRA (10) se procede a la construcción de las funciones de transferencia de respuesta en frecuencia de la fase del devanado (15) y de respuesta en frecuencia de la ganancia del devanado (16) . El sistema y método contemplan el cálculo (17) de la frecuencia de resonancia del devanado (3) obteniendo el valor de frecuencia para el cual la respuesta en frecuencia de la fase del devanado (15) es nula. Posteriormente, con dicho valor de frecuencia de resonancia, fR, el sistema y método considera la utilización de dicho parámetro para la obtención (18) del valor de ganancia para la frecuencia de resonancia (18) introduciendo dicho valor de fR en la respuesta en frecuencia de la ganancia del devanado (16) . Una vez obtenidos ambos valores, la invención contempla la casación de dichos valores con una base de datos (21) , que dispone de superficies construidas mediante ensayos previos de laboratorio a devanados semejantes con faltas a tierra realizadas en diversos puntos con diversas resistencias de defecto, habiendo para ello construido funciones del tipo: fR = u (n, R f) M.fR) = v (n, Rf ) Donde: n: número de espira en falta. Rf: resistencia de falta. fR: frecuencia de resonancia. A (fR) : es la ganancia del sistema a frecuencia de resonancia de la falta. u y v son funciones generalizadas que dependerán del devanado ensayado. De esta forma que se disponen de dos superficies distintas: Una superficie para frecuencias de resonancia (17) proveniente de ensayos previos con faltas en distinta posición, es decir en distinto número de espira y resistencia de defecto, obtenido de la respuesta en frecuencia de la fase del devanado (15) . Y la otra superficie para ganancias a dicha frecuencia de resonancia (18) proveniente de ensayos previos con faltas en distintas posiciones y resistencia de defecto obtenido de la respuesta en frecuencia de la ganancia del devanado (16) . Con la frecuencia de resonancia (17) y ganancia a dicha frecuencia de resonancia se procede a las etapas de obtención de la curva de corte de frecuencia de resonancia a partir de una base de datos (19) y obtención de la curva de corte de ganancia constante a partir de una base de datos (20) que proponen curvas de corte con expresiones: u (n, R f) = cte1 v (n, R f) = cte2 Donde cte1 y cte2 son constantes y vienen definidos por el valor de frecuencia de resonancia (17) y su correspondiente ganancia del sistema, obtenidas en el ensayo para la localización de la falta a tierra del devanado (3) . En la resolución del problema de la localización, la presente invención contempla la casación de las curvas de corte de fase y ganancia (22) con las superficies anteriores de tal forma que dicha casación de ambas rectas define un punto de corte donde las coordenadas del punto en un plano con "ejes X-Y" = "ejes Rr n" o viceversa son las soluciones al problema de diagnóstico de faltas a tierra. Finalmente, el sistema y método de la invención permiten la emisión de información de una señal de espira en falta (23) y una señal de resistencia de falta (24) mediante una etapa de emisión de información de falta (25) a ispositivos externos, pudiendo ser estos entre otros, equipos de monitoreo o protección eléctrica. La figura 3 muestra el diagrama de flujo del método de la invención, donde se siguen los pasos anteriormente descritos. Primero se recopilan las señales de ganancia del devanado (12) , de fase del devanado (13) y de frecuencia (14) . Se proceden a construir las correspondientes funciones de transferencia de fase (15) y ganancia (16) y a partir de la primera se obtiene la frecuencia de resonancia para: arg[H (j2nfR) \ = 0 Donde H es la función de transferencia compleja obtenida en el equipo de medida FRA (10) . Una vez obtenida la frecuencia de resonancia (17) , se obtiene de la respuesta en frecuencia en ganancia (16) dicha ganancia (18) para el determinado valor de frecuencia de resonancia de tal forma que: H (j2 n fR) = A{fR) Una vez obtenidas la frecuencia de resonancia (17) y su correspondiente ganancia (18) se cargan desde la base de datos (21) la superficie de faltas para frecuencias de resonancia (21.a) y la superficie de faltas para ganancias a frecuencia de resonancia (21.b) correspondiente a ensayos previos de un devanado semejante. Se procede entonces a la introducción de los parámetros obtenidos en dicha base de datos mediante la etapa de obtención de la curva de corte de frecuencia de resonancia a partir de una base de datos (19) y la etapa de obtención de la curva de corte de ganancia constante a partir de una base de datos (20) para obtener las líneas que posteriormente se cortarán en un plano 2D donde cuyos ejes serán la resistencia de defecto, Rf, y el número de espira en falta, n. Introduciendo la curva de corte a frecuencia de resonancia (28) y curva de corte ganancia constante (29) en un plano 2D cuyos ejes serán la resistencia de defecto, Rf, y el número de espira en falta, n, se produce una casación de las curvas de corte (22) y se obtiene un punto de corte entre ellas donde la solución en resistencia de defecto (24) y numero de espira (23) en falta corresponde a la everidad de la falta y localización de la misma respectivamente. Finalmente, el método contempla la emisión de estos parámetros a otros dispositivos mediante una etapa de emisión de información de falta (25) . A modo de ejemplo representativo y no limitativo de la invención, la figura 4 muestra las superficies cargadas desde la base de datos para frecuencias de resonancia (21.a) y ganancia en dichas frecuencias de resonancia (21.b) en ejes tridimensionales. Los ejes de estas superficies son la resistencia de defecto (24) y el número de espiras (23) , como ejes X e Y y el Eje-Z en frecuencia (30) y la resistencia de defecto (24) y el número de espiras (23) como ejes X e Y y el Eje-Z en ganancia (31) respectivamente. Finalmente, procediendo al corte de la superficie referente a frecuencias de resonancia (21.a) con la frecuencia de resonancia (17) de la falta y al corte de la superficie referente a las ganancias a frecuencia de resonancia (21.b) con su respectiva ganancia (18) , se obtiene un plano bidimensional donde la casación de las curvas de corte previas (28 y 29) se cortan a su vez y permiten la obtención de la espira en falta, n, y la resistencia de defecto, Rf. El sistema y método de la invención pretende abordar las desventajas e inconvenientes presentados en el estado de la técnica proponiendo una forma de localización de faltas a tierra en el que se especifica la espira de defecto y la resistencia de defecto en dicho punto de una forma sencilla y rápida.
+ ES-2848598_A1 SISTEMA Y MÉTODO DE LOCALIZACIÓN DE FALTAS A TIERRA EN DEVANADOS DE MÁQUINAS ELÉCTRICAS OBJETO DE LA INVENCIÓN La presente invención se refiere a un método y sistema de localización de faltas a tierra en devanados de máquinas eléctricas capaz de localizar este tipo de falta estando en cualquier punto del circuito eléctrico, con este desconectado de la red eléctrica. El método y sistema de localización de faltas a tierra en arrollamientos eléctricos según la presente invención es de utilidad para el mantenimiento, principalmente correctivo, de máquinas eléctricas pudiendo ser también de aplicación en el mantenimiento predictivo gracias a que dicho sistema permite la obtención de la resistencia de defecto de una posible falta en el sistema eléctrico, así como el número de espira donde se encuentra dicho defecto. ANTECEDENTES DE LA INVENCIÓN A lo largo de la vida útil de las máquinas eléctricas uno de los fallos más comunes que puede experimentar dicha maquinaria es la aparición de faltas a tierra. Estas faltas ponen en riesgo la integridad de las máquinas y pueden afectar directamente a una alteración en su funcionamiento o provocar daños severos en máquinas adyacentes o en la salud de trabajadores cercanos. El campo del diagnóstico se encarga entonces de detectar y localizar estas faltas para evitar que aparezcan este tipo de defectos entre otros o en su defecto para proceder a una rápida protección del sistema eléctrico en cuestión. Son muchos los sistemas que se encargan de detectar o localizar faltas a tierra en máquinas eléctricas, por ejemplo, los sistemas mostrados en los siguientes documentos: La patente US 6794879 B2 titulada "Apparatus and method for detecting and calculating ground fault resistance" se refiere a una invención que diagnostica faltas en el devanado de campo de máquinas síncronas. Utiliza la inyección de onda cuadrada entre terminales de alimentación de la excitación, y dependiendo de la deformación de dicha onda cuadrada en el sensor emplazado aguas abajo se puede estimar la localización de la falta en el devanado inductor así como la resistencia de falta. La patente US 10429419 B2 titulada "System and method for iterative condition monitoring and fault diagnosis of electric machines" se refiere a una invención que analiza la señal de corriente de las corrientes del estator y armónicos determinados con el objetivo de detectar posibles faltas como excentricidades en las máquinas. La patente DE 102001003021 B4 titulada "Methods and apparatus for diagnosing stator windings in an electric motor se refiere a un método y sistema para el diagnóstico de faltas en estátores de máquinas eléctricas que mediante la medida de corriente y tensión y su comparación en secuencia inversa con ciertas referencias preestablecidas es capaz de detectar faltas dichos devanados. La patente ES 2454045 A1 titulada "Sistema y método de localización de defectos a tierra en devanados estatóricos de máquinas síncronas puestas a tierra mediante una impedancia de elevado valor basado en la estimación de la resistencia de defecto a baja frecuencia" se refiere a un sistema y método en el que se localizan faltas a tierra mediante la utilización de variables de una etapa de medida y la inyección de una onda de tensión de baja frecuencia entre el neutro de un generador síncrono y tierra. Finalmente, la solicitud de patente P202030371 "Sistema y método de localización de faltas a tierra en arrollamientos eléctricos" utiliza la técnica de análisis de la respuesta en frecuencia para la localización de los defectos a tierra, sin embargo en este método hay que realizar dos ensayos al devanado, inyectando por ambos extremos. Para localizar defectos y faltas en máquinas paradas u off-line, habitualmente se tiliza la técnica de análisis de respuesta en frecuencia, o FRA, especialmente en transformadores en los que se pretende localizar faltas entre espiras, o el movimiento de los arrollamientos de dichos transformadores durante el transporte o tras sobrecorrientes. Esta técnica comprende inyectar una onda de tensión sinusoidal con amplitud fija normalmente de 1 o 10 V con frecuencia variable entre 10 Hz y 20 MHz y el registro de la tensión de salida en el otro extremo del circuito a analizar en una resistencia de valor conocido. Mediante la obtención de la función de transferencia se obtienen los parámetros ganancia y fase de esta que se utilizan para los análisis de fallos. Los ensayos FRA son -habitualmente- capaces de detectar la existencia de faltas a tierra. No obstante, es mucho menos frecuente que dichos ensayos permitan obtener la localización de las dichas faltas. A continuación se muestran varias formas de detectar defectos con esta técnica: En el artículo "Y. Liu et al., "A study of the sweep frequency impedance method and its application in the detection of internal winding short circuit faults in power transformers, " in IEEE Transactions on Dielectrics and Electrical Insulation, vol. 22, no. 4, pp. 2046-2056, August 2015" se divulga un método de análisis mediante la técnica FRA centrado en el análisis de su impedancia (SFI) . Observando fluctuaciones en la amplitud de ganancia del sistema, este detecta y cuantifica posibles faltas entre espiras en transformadores, pero sin referirse a la localización de estas. En el artículo "J. Nosratian Ahour, S. Seyedtabaii and G. B. Gharehpetian, "Determination and localisation of turn-to-turn fault in transformer winding using frequency response analysis, " in IET Science, Measurement & Technology, vol. 12, no. 3, pp. 291-300, 5 2018." La invención se refiere a un método para la detección y localización de faltas entre espiras con el mismo sistema FRA. Este método se basa en la comparación de patrones calculados mediante un modelo matemático y la ganancia FRA obtenida en el ensayo directo al transformador. A diferencia del método anterior, este es capaz de estimar la localización de la falta por secciones del devanado. Otras técnicas de diagnóstico de faltas en sistemas con devanados están ligadas a la inteligencia artificial (IA) y al aprendizaje de la propia IA con el tiempo en el ajuste de modelos que después se utilizan para contrastar con los diagnósticos FRA recogidos de los equipos. En el artículo "V. Nurmanova, M. Bagheri, A. Zollanvari, K. Aliakhmet, Y. Akhmetov and G. B. Gharehpetian, "A New Transformer FRA Measurement Technique to Reach Smart Interpretation for Inter-Disk Faults, " in IEEE Transactions on Power Deliver y , vol. 34, no. 4, pp. 1508-1519, Aug. 2019." esta técnica se utiliza para sistemas con faltas entre espiras o entre discos de devanados para transformadores eléctricos. Finalmente, en el artículo "A. Mugarra, C. A. Platero, J. A. Martínez and U. Albizuri-Txurruka, "Validity of Frequency Response Analysis (FRA) for Diagnosing Large Salient Poles of Synchronous Machines, " in IEEE Transactions on Industr y Applications, vol. 56, no. 1, pp. 226-234, Jan.-Feb. 2020." se trata el FRA para faltas entre espiras, así como para faltas a tierra. Sin embargo, no se procede a la localización de ningún tipo de ellas, pero si a su detección mediante la observación de la frecuencia de resonancia del sistema ensayado. Viendo el estado de la técnica se concluye en que es necesario establecer nuevos sistemas y métodos de análisis FRA para la localización de faltas a tierra en máquinas eléctricas de tal forma que hagan de esta un proceso sencillo de ejecutar y fácil de interpretar. Además, sería ventajoso que dichos sistemas y métodos de localización de faltas a tierra de permitiesen obtener la localización (n) y la magnitud del defecto en valores óhmicos de resistencia de defecto (Rf) . DESCRIPCIÓN DE LA INVENCIÓN La presente invención pretende abordar todas las desventajas e inconvenientes del estado de la técnica anterior. Para ello, la invención contempla un sistema y un método de localización de faltas a tierra en devanados de máquinas eléctricas basados en la técnica de análisis de respuesta en frecuencia del circuito de la máquina. Más en articular, un primer objeto de la invención se refiere a un método de localización de faltas a tierra en devanados de máquinas eléctricas, del tipo asado en análisis de respuesta en frecuencia, caracterizado porque comprende -al menos- las siguientes etapas: a) inyectar señales eléctricas de frecuencia variable y amplitud constante por un borne del devanado en falta de la maquina eléctrica y medir en el borne contrario de dicho devanado -al menos- la ganancia, fase y frecuencia correspondiente; b) calcular las funciones de transferencia de fase y ganancia en función de las medidas de ganancia, fase y frecuencia obtenidas en la etapa anterior; c) obtener la frecuencia de resonancia (fR) para el devanado en falta; d) obtener la ganancia A (fR) correspondiente a la frecuencia de resonancia (fR) del devanado en falta; e) obtener una curva de corte de frecuencia de resonancia a partir de una base de datos que comprende emulaciones de faltas a distintas resistencias de falta (Rf) y en distintas espiras para un devanado tipo, siendo (n) el número de espira en falta, determinando para ello la frecuencia de resonancia del devanado en falta mediante la casación de un plano paralelo a los ejes Rf y n, de tal forma que f R = cte, obteniendo una curva bidimensional -que depende exclusivamente de los parámetros Rf y n- producida por el corte entre dicho plano (fR=cte) y la curva de corte de frecuencia de resonancia -en tres dimensiones- de la base de datos; f) obtener una curva de corte de ganancia constante a partir de una base de datos que comprende valores de anteriores ensayos de faltas a distintas resistencias de falta y en distintas espiras para un devanado tipo, determinando para ello la ganancia para la frecuencia de resonancia del devanado en falta mediante la casación de un plano paralelo a los ejes Rf y n de tal forma que A (fR) = c t e, obteniendo una curva bidimensional -que depende exclusivamente de los parámetros Rf y n, producida por el corte entre dicho plano (A (fR) =cte) y la curva de corte de ganancia constante -en tres dimensiones- de la base de datos; g) determinar el número de espira en falta (n) y la resistencia de defecto (Rf) del devanado en falta de la maquina eléctrica como el punto de corte entre la curva de corte de frecuencia de resonancia y la curva de corte de ganancia constante; y h) emitir la información de falta una vez recopiladas las señales de numero de espira en falta y resistencia de falta a un dispositivo de monitoreo externo o relé de protección. En una realización preferida de la invención, en la etapa c) arriba indicada, la frecuencia la frecuencia de resonancia fR es el valor de frecuencia para el cual la respuesta en frecuencia de la fase del devanado es nula (en otras palabras, cuando el circuito eléctrico es puramente resistivo) . En una realización preferida de la invención, en la etapa e) arriba indicada, las emulaciones de faltas son funciones del tipo superficie espacial que dependen del número de espira en falta (n) , de la resistencia de defecto (Rf ) y de la frecuencia de resonancia (fR) . En una realización preferida de la invención, en la etapa f) arriba indicada, los valores de anteriores ensayos de faltas son funciones del tipo superficie espacial que dependen del número de espira en falta (n) , de la resistencia de defecto, (Rf) y de la ganancia asignada a frecuencia de resonancia, A (fR) . Un segundo aspecto de la invención se refiere a un sistema de localización de faltas a tierra en devanados de máquinas eléctricas, del tipo basado en análisis de respuesta en frecuencia, provisto de: - un dispositivo de inyección de tensión a frecuencia variable y amplitud constante entre un borne del devanado en falta y una referencia a tierra; - una impedancia de medida calibrada, conectada entre el otro borne del devanado en falta y una referencia a tierra; - un medidor de salida configurado para medir entre los bornes de la impedancia de medida calibrada, determinar la ganancia y fase del devanado en función de la frecuencia de inyección y enviar dicha información a un receptor; caracterizado porque está provisto además de un dispositivo de localización de faltas a tierra que comprende -al menos- los siguientes elementos: - un receptor, configurado para recibir las medidas de frecuencia, fase y ganancia obtenidas por el medidor de salida; - medios constructores de funciones de transferencia de fase y ganancia, configurados para calcular la función de transferencia de fase y ganancia a partir de las medidas de frecuencia, fase y ganancia del medidor de salida; - medios calculadores de la frecuencia de resonancia y ganancia, configurados para calcular la frecuencia de resonancia fR y la ganancia a dicha frecuencia de resonancia A (fR) del devanado en falta, a partir de las medidas de frecuencia, fase y ganancia del medidor de salida; - un dispositivo de almacenamiento de bases de datos de ensayos previos de faltas en un devanado tipo, en los que se han emulado faltas en distintas espiras y con distintas resistencias de falta, estando las bases de datos configuradas para proporcionar el número de espira (n) de la falta a tierra a partir de la frecuencia de resonancia y ganancia para dicha frecuencia de resonancia; - medios calculadores de curvas de corte, configurados para calcular una curva de corte de frecuencia de resonancia y una curva de corte de ganancia constante a partir de los valores de frecuencia de resonancia y ganancia del devanado ensayado incluidos en la base de datos; - un localizador de faltas, configurado para hallar el punto de corte de las curvas obtenidas por los medios calculadores de curvas, siendo dicho punto de corte una función del número de espira (n) de la falta y de la resistencia de falta (Rf) ; y - un elemento emisor de información configurado para enviar el número de espira (n) de la falta y la resistencia de falta (Rf) , obtenidas por el localizador de faltas. En una realización preferida de la invención, las bases de datos de ensayos previos de emulaciones de faltas en forma de funciones del tipo superficie espacial que dependen del número de espira en falta (n) , de la resistencia de defecto (Rf ) y de la frecuencia de resonancia (fR) . BREVE DESCRIPICIÓN DE LAS FIGURAS A continuación, se describen de manera muy breve una serie de dibujos que ayudan a comprender mejor la invención, que se relacionan expresamente con una realización de dicha invención y se presentan como unos ejemplos no limitativos de ésta. La figura 1 es un esquema de conexiones del sistema de análisis de respuesta en frecuencia (FRA) del devanado a ensayar y del sistema de localización de faltas a tierra; La figura 2 es un diagrama de bloques del sistema de localización de faltas a tierra según la presente invención; La figura 3 es una diagrama de flujo del método de localización de faltas de la invención; y La figura 4 es una representación gráfica de las superficies y curvas que se utilizan para la localización de faltas a tierra en la presente invención. REFERENCIAS NUMÉRICAS DE LAS FIGURAS (1) Borne de inyección de tensión. (2) Borne de medida de tensión de salida; (3) Devanado; (4) Falta a tierra; (5) Dispositivo de inyección de señales eléctricas a frecuencia variable y amplitud constante; (6) Impedancia de medida; (7) Medidor de salida; (8) Referencia a tierra; (9) Medidas recogidas; (10) Equipo de ensayos de análisis de respuesta en frecuencia (FRA) ; (11) Dispositivo de localización de faltas a tierra; (12) Señal de ganancia del devanado; (13) Señal de fase del devanado; (14) Señal de frecuencia; (15) Respuesta en frecuencia de la fase del devanado; (16) Respuesta en frecuencia de la ganancia del devanado; (17) Frecuencia de resonancia; (18) Ganancia para la frecuencia de resonancia; (19) Etapa de obtención de la curva de corte de frecuencia de resonancia a partir de una base de datos previamente almacenada para máquinas o devanados similares; (20) Etapa de obtención de la curva de corte de ganancia constante a partir de una base de datos previamente almacenada para máquinas o devanados similares; (21) Base de datos; (21.a) Superficie de faltas para frecuencias de resonancia; (21.b) Superficie de faltas para ganancias a frecuencia de resonancia; (22) Casación de las curvas de corte de fase y ganancia; (23) Señal de espira en falta; (24) Señal de resistencia de falta; (25) Etapa de emisión de información de falta; (26) Etapa de obtención de la frecuencia de resonancia; (27) Etapa de obtención de la ganancia a frecuencia de resonancia; (28) Curva de corte a frecuencia de resonancia (29) Curva de corte ganancia constante; (30) Eje-Z en frecuencia; (31) Eje-Z en ganancia. DESCRIPCIÓN DETALLADA DE LAS FIGURAS La presente invención se refiere a un sistema y método de localización de faltas a tierra en devanados de máquinas eléctricas capaz de localizar dichas faltas indicando el número de espira y resistencia de defecto entre dicha espira y tierra mediante el análisis de respuesta en frecuencia de un dispositivo FRA con un barrido en frecuencias que es práctica habitual que esté entre 10 Hz y 20 MHz, lo que es considerado suficiente para la obtención de datos relevantes a la localización de faltas en devanados eléctricos. En la figura 1 se puede observar el esquema de conexiones del equipo de medida FRA (10) , que permite la obtención de la función de transferencia del evanado ensayado donde se quiere localizar una falta a tierra. Dichas conexiones se producen en un devanado (3) con una falta a tierra (4) a localizar. Este dispone de un borne de inyección de tensión (1) mediante un dispositivo de inyección de tensión a frecuencia variable y amplitud constante (5) y un borne de medida de tensión de salida (2) conectada a una impedancia de medida (6) del equipo donde con un medidor de tensión de salida (7) , conectado entre dicho borne (2) y la referencia a tierra (8) del equipo FRA (10) , permite al menos la obtención de medidas (9) de ganancia y fase en función de la frecuencia de inyección. Dichas medidas son volcadas posteriormente a un dispositivo de localización de faltas a tierra (11) . En la figura 2 se muestra el diagrama de bloques del dispositivo de localización de faltas a tierra (11) . Primeramente, se recopilan las medidas recogidas (9) que han de ser al menos la señal de ganancia del devanado (12) , la señal de fase del devanado (13) y la señal de frecuencia (14) . Mediante estos datos recogidos por el equipo de medida FRA (10) se procede a la construcción de las funciones de transferencia de respuesta en frecuencia de la fase del devanado (15) y de respuesta en frecuencia de la ganancia del devanado (16) . El sistema y método contemplan el cálculo (17) de la frecuencia de resonancia del devanado (3) obteniendo el valor de frecuencia para el cual la respuesta en frecuencia de la fase del devanado (15) es nula. Posteriormente, con dicho valor de frecuencia de resonancia, fR, el sistema y método considera la utilización de dicho parámetro para la obtención (18) del valor de ganancia para la frecuencia de resonancia (18) introduciendo dicho valor de fR en la respuesta en frecuencia de la ganancia del devanado (16) . Una vez obtenidos ambos valores, la invención contempla la casación de dichos valores con una base de datos (21) , que dispone de superficies construidas mediante ensayos previos de laboratorio a devanados semejantes con faltas a tierra realizadas en diversos puntos con diversas resistencias de defecto, habiendo para ello construido funciones del tipo: fR = u (n, R f) M.fR) = v (n, Rf ) Donde: n: número de espira en falta. Rf: resistencia de falta. fR: frecuencia de resonancia. A (fR) : es la ganancia del sistema a frecuencia de resonancia de la falta. u y v son funciones generalizadas que dependerán del devanado ensayado. De esta forma que se disponen de dos superficies distintas: Una superficie para frecuencias de resonancia (17) proveniente de ensayos previos con faltas en distinta posición, es decir en distinto número de espira y resistencia de defecto, obtenido de la respuesta en frecuencia de la fase del devanado (15) . Y la otra superficie para ganancias a dicha frecuencia de resonancia (18) proveniente de ensayos previos con faltas en distintas posiciones y resistencia de defecto obtenido de la respuesta en frecuencia de la ganancia del devanado (16) . Con la frecuencia de resonancia (17) y ganancia a dicha frecuencia de resonancia se procede a las etapas de obtención de la curva de corte de frecuencia de resonancia a partir de una base de datos (19) y obtención de la curva de corte de ganancia constante a partir de una base de datos (20) que proponen curvas de corte con expresiones: u (n, R f) = cte1 v (n, R f) = cte2 Donde cte1 y cte2 son constantes y vienen definidos por el valor de frecuencia de resonancia (17) y su correspondiente ganancia del sistema, obtenidas en el ensayo para la localización de la falta a tierra del devanado (3) . En la resolución del problema de la localización, la presente invención contempla la casación de las curvas de corte de fase y ganancia (22) con las superficies anteriores de tal forma que dicha casación de ambas rectas define un punto de corte donde las coordenadas del punto en un plano con "ejes X-Y" = "ejes Rr n" o viceversa son las soluciones al problema de diagnóstico de faltas a tierra. Finalmente, el sistema y método de la invención permiten la emisión de información de una señal de espira en falta (23) y una señal de resistencia de falta (24) mediante una etapa de emisión de información de falta (25) a ispositivos externos, pudiendo ser estos entre otros, equipos de monitoreo o protección eléctrica. La figura 3 muestra el diagrama de flujo del método de la invención, donde se siguen los pasos anteriormente descritos. Primero se recopilan las señales de ganancia del devanado (12) , de fase del devanado (13) y de frecuencia (14) . Se proceden a construir las correspondientes funciones de transferencia de fase (15) y ganancia (16) y a partir de la primera se obtiene la frecuencia de resonancia para: arg[H (j2nfR) \ = 0 Donde H es la función de transferencia compleja obtenida en el equipo de medida FRA (10) . Una vez obtenida la frecuencia de resonancia (17) , se obtiene de la respuesta en frecuencia en ganancia (16) dicha ganancia (18) para el determinado valor de frecuencia de resonancia de tal forma que: H (j2 n fR) = A{fR) Una vez obtenidas la frecuencia de resonancia (17) y su correspondiente ganancia (18) se cargan desde la base de datos (21) la superficie de faltas para frecuencias de resonancia (21.a) y la superficie de faltas para ganancias a frecuencia de resonancia (21.b) correspondiente a ensayos previos de un devanado semejante. Se procede entonces a la introducción de los parámetros obtenidos en dicha base de datos mediante la etapa de obtención de la curva de corte de frecuencia de resonancia a partir de una base de datos (19) y la etapa de obtención de la curva de corte de ganancia constante a partir de una base de datos (20) para obtener las líneas que posteriormente se cortarán en un plano 2D donde cuyos ejes serán la resistencia de defecto, Rf, y el número de espira en falta, n. Introduciendo la curva de corte a frecuencia de resonancia (28) y curva de corte ganancia constante (29) en un plano 2D cuyos ejes serán la resistencia de defecto, Rf, y el número de espira en falta, n, se produce una casación de las curvas de corte (22) y se obtiene un punto de corte entre ellas donde la solución en resistencia de defecto (24) y numero de espira (23) en falta corresponde a la everidad de la falta y localización de la misma respectivamente. Finalmente, el método contempla la emisión de estos parámetros a otros dispositivos mediante una etapa de emisión de información de falta (25) . A modo de ejemplo representativo y no limitativo de la invención, la figura 4 muestra las superficies cargadas desde la base de datos para frecuencias de resonancia (21.a) y ganancia en dichas frecuencias de resonancia (21.b) en ejes tridimensionales. Los ejes de estas superficies son la resistencia de defecto (24) y el número de espiras (23) , como ejes X e Y y el Eje-Z en frecuencia (30) y la resistencia de defecto (24) y el número de espiras (23) como ejes X e Y y el Eje-Z en ganancia (31) respectivamente. Finalmente, procediendo al corte de la superficie referente a frecuencias de resonancia (21.a) con la frecuencia de resonancia (17) de la falta y al corte de la superficie referente a las ganancias a frecuencia de resonancia (21.b) con su respectiva ganancia (18) , se obtiene un plano bidimensional donde la casación de las curvas de corte previas (28 y 29) se cortan a su vez y permiten la obtención de la espira en falta, n, y la resistencia de defecto, Rf. El sistema y método de la invención pretende abordar las desventajas e inconvenientes presentados en el estado de la técnica proponiendo una forma de localización de faltas a tierra en el que se especifica la espira de defecto y la resistencia de defecto en dicho punto de una forma sencilla y rápida.
Publicaciones:
ES2848598 (10/08/2021) - A1 Solicitud de patente con informe sobre el estado de la técnica
ES2848598 (21/02/2022) - B2 Patente de invención con examen
Eventos:
En fecha 30/12/2020 se realizó Registro Instancia de Solicitud
En fecha 30/12/2020 se realizó PETEX_Petición de examen sustantivo
En fecha 04/01/2021 se realizó Admisión a Trámite
En fecha 04/01/2021 se realizó Aceptación Tramitación CAP
En fecha 04/01/2021 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 08/01/2021 se realizó Superado examen de oficio
En fecha 20/07/2021 se realizó 3411X_Alta Mandatarios
En fecha 22/07/2021 se realizó Alta mandatario
En fecha 29/07/2021 se realizó Realizado IET
En fecha 03/08/2021 se realizó 1109P_Comunicación Traslado del IET
En fecha 10/08/2021 se realizó Publicación Solicitud
En fecha 10/08/2021 se realizó Publicación Folleto Solicitud con IET (A1)
En fecha 04/11/2021 se realizó 5215P_Observaciones del solicitante al IET, Opinión Escrita y/o alegaciones a observaciones de terceros
En fecha 10/11/2021 se realizó Validación petición y/o pago de examen sustantivo conforme
En fecha 01/02/2022 se realizó Designación de Comisión de Expertos
En fecha 04/02/2022 se realizó Finalización de Examen Sustantivo
En fecha 04/02/2022 se realizó 6121P_Comunicación finalización de examen sustantivo
En fecha 10/02/2022 se realizó Publicación finalización de examen sustantivo
En fecha 14/02/2022 se realizó Concesión con examen sustantivo
En fecha 14/02/2022 se realizó Entrega título
En fecha 14/02/2022 se realizó 6125P_Notificación de concesión con examen sustantivo
En fecha 21/02/2022 se realizó Publicación concesión Patente
En fecha 21/02/2022 se realizó Publicación Folleto Concesión
En fecha 22/08/2022 se realizó Plazo expirado presentación de oposiciones contra la concesión de la Patente
Pagos:
30/12/2020 - Pago Tasas IET
17/01/2023 - Pago 03 Anualidad
04/01/2024 - Pago 04 Anualidad
Fuente de la información
Parte de la información aquí publicada es pública puesto que ha sido obtenida de la Oficina de Propiedad Industrial de los diferentes países el 26/04/2024 y por lo tanto puede ser que la información no esté actualizada.Parte de la información aquí mostrada ha sido calculada por nuestro sistema informático y puede no ser veraz.
Privacidad
Si considera que al información aquí publicada afecta a su privacidad y desea que eliminemos la información aquí publicada envíe un email a info@patentes-y-marcas.com o rellene el formulario que encontrará aquí.Información sobre el registro de patente nacional por SISTEMA Y MÉTODO DE LOCALIZACIÓN DE FALTAS A TIERRA EN DEVANADOS DE MÁQUINAS ELÉCTRICAS con el número P202031319
El registro de patente nacional por SISTEMA Y MÉTODO DE LOCALIZACIÓN DE FALTAS A TIERRA EN DEVANADOS DE MÁQUINAS ELÉCTRICAS con el número P202031319 fue solicitada el 30/12/2020. Se trata de un registro en España por lo que este registro no ofrece protección en el resto de países. El registro SISTEMA Y MÉTODO DE LOCALIZACIÓN DE FALTAS A TIERRA EN DEVANADOS DE MÁQUINAS ELÉCTRICAS con el número P202031319 fue solicitada por UNIVERSIDAD POLITÉCNICA DE MADRID mediante los servicios del agente ELZABURU, S.L.P. El registro [modality] por SISTEMA Y MÉTODO DE LOCALIZACIÓN DE FALTAS A TIERRA EN DEVANADOS DE MÁQUINAS ELÉCTRICAS con el número P202031319 está clasificado como G01R 31/72,G01R 31/52 según la clasificación internacional de patentes.
Otras invenciones solicitadas en la clasificación internacional de patentes G01R 31/72,G01R 31/52.
Es posible conocer invenciones similares al campo de la técnica se refiere. El registro de patente nacional por SISTEMA Y MÉTODO DE LOCALIZACIÓN DE FALTAS A TIERRA EN DEVANADOS DE MÁQUINAS ELÉCTRICAS con el número P202031319 está clasificado con la clasificación G01R 31/72,G01R 31/52 por lo que si se desea conocer más registros con la clasificación G01R 31/72,G01R 31/52 clicar aquí.Otras invenciones solicitadas a través del representante ELZABURU, S.L.P
Es posible conocer todas las invenciones solicitadas a través del agente ELZABURU, S.L.P entre las que se encuentra el registro patente nacional por SISTEMA Y MÉTODO DE LOCALIZACIÓN DE FALTAS A TIERRA EN DEVANADOS DE MÁQUINAS ELÉCTRICAS con el número P202031319. Si se desean conocer más invenciones solicitadas a través del agente ELZABURU, S.L.P clicar aquí.Patentes en España
Es posible conocer todas las invenciones publicadas en España entre las que se encuentra el registro patente nacional por SISTEMA Y MÉTODO DE LOCALIZACIÓN DE FALTAS A TIERRA EN DEVANADOS DE MÁQUINAS ELÉCTRICAS. Nuestro portal www.patentes-y-marcas.com ofrece acceso a las publicaciones de patentes en España. Conocer las patentes registradas en un país es importante para saber las posibilidades de fabricar, vender o explotar una invención en España.Patentes registradas en la clase G
Es posible conocer todas las patentes registradas en la clase G (FISICA) entre las que se encuentra la patente SISTEMA Y MÉTODO DE LOCALIZACIÓN DE FALTAS A TIERRA EN DEVANADOS DE MÁQUINAS ELÉCTRICAS con el número P202031319. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase G01
Es posible conocer todas las patentes registradas en la clase G01 (METROLOGIA; ENSAYOS) entre las que se encuentra la patente SISTEMA Y MÉTODO DE LOCALIZACIÓN DE FALTAS A TIERRA EN DEVANADOS DE MÁQUINAS ELÉCTRICAS con el número P202031319. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase G01R
Es posible conocer todas las patentes registradas en la clase G01R (MEDIDA DE VARIABLES ELECTRICAS; MEDIDA DE VARIABLES MAGNETICAS) entre las que se encuentra la patente SISTEMA Y MÉTODO DE LOCALIZACIÓN DE FALTAS A TIERRA EN DEVANADOS DE MÁQUINAS ELÉCTRICAS con el número P202031319. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.
¿Tienes alguna duda?
Escribe tu consulta y te responderemos rápida y gratuitamente.

Otras patentes similares
 P202031284
P202031284
Profesionales Recomendados
Barcelona
933182440
España
933182440
España

Barcelona
+34 93 362 16 97
España
+34 93 362 16 97
España

Barcelona
932 593 600
España
932 593 600
España







