


- Home /
- Publicaciones de patentes /
- Procedimiento para generar un vector de control y sistema ADEX que lo aplica
Patente nacional por "Procedimiento para generar un vector de control y sistema ADEX que lo aplica"
Este registro ha sido solicitado por
ADAPTIVE PREDICTIVE EXPERT CONTROL ADEX SA
a través del representanteMAGDALENA ALESCI NARANJO
Contacto
- Estado: A punto de caducar
- País:
- España
- Fecha solicitud:
- 06/02/2020
- Número solicitud:
-
P202030096
- Número publicación:
-
ES2848475
- Fecha de concesión:
-
18/01/2022
- Inventores:
-
Persona física
- Datos del titular:
-
ADAPTIVE PREDICTIVE EXPERT CONTROL ADEX SA
- Datos del representante:
-
Magdalena Alesci Naranjo
- Clasificación Internacional de Patentes:
- G05B 13/04,G05B 21/00,G05D 11/00
- Clasificación Internacional de Patentes de la publicación:
- G05B 13/04,G05B 21/00,G05D 11/00
- Fecha de vencimiento:
Quiero registrar una patente

Reivindicaciones:
+ ES-2848475_A11. Procedimiento para generar un vector de control u (k) durante cada uno de una pluralidad de instantes de control k, dicho vector de control se aplica a un aparato que realiza un proceso con al menos una variable de entrada y al menos una variable de salida, al menos una de dichas variables de entrada define un vector de entrada de proceso y al menos una de dichas variables de salida define un vector de salida de proceso y (k) , dicho aparato varía dicho vector de entrada de proceso de acuerdo con el valor de dicho vector de control, dicho método guía dicho vector de salida del proceso hacia un vector de consigna SP (k) , dicho método caracterizado por comprender los siguientes pasos: (A) generar un vector función integral U (k) del vector de control que se aplica al proceso u (k) ejecutando la secuencia de operaciones de un controlador ADEX en uno de sus dominios adaptativos predictivos, cuyo modelo adaptativo predictivo relaciona el vector de salida del proceso y (k) con dicho vector función integral del vector de control, con el fin de conducir el vector de salida del proceso hacia su consigna SP (k) ; (B) calcular un segundo vector función integral Uk-i (k-1) del vector de control a aplicar al proceso hasta el instante k - 1; (C) calcular el vector de control a aplicar al proceso u (k) utilizando un operador diferencial que deriva dicho vector de control a partir de los vectores funciones integrales generados en los pasos previos (A) y (B) ; (D) aplicar dicho vector de control al aparato que realiza el proceso. 2. Procedimiento según la reivindicación 1, caracterizado por realizar los pasos (A) y (B) de la siguiente forma: (A) Generar un vector función integral de control U (k) , que representa una función integral de los valores de dicho vector de control u (k) entre dos instantes de control k+1-5 y k, siendo 5 > 2, utilizando un controlador ADEX que opera en un dominio adaptativo predictivo y cuyo modelo adaptativo predictivo relaciona dinámicamente el vector de salida del proceso y (k) con dicho vector función integral de control, de forma que la salida de dicho controlador ADEX s dicho vector U (k) y se calcula para guiar dicho vector de salida del proceso hacia su vector de consigna SP (k) ; (B) Generar un segundo vector función integral Uk-i (k -1) , mediante una función integral de los valores de dicho vector de control u (k) entre los dos instantes de control previos k+1-5 y k-1. 3. Un sistema ADEX que comprende un computador controlador para aplicar el procedimiento para generar un vector de control u (k) de cualquiera de las reivindicaciones 1 y 2, durante cada uno de una pluralidad de instantes de control k, dicho vector de control se aplica a un aparato que lleva a cabo un proceso con al menos una variable de entrada y al menos una variable de salida, al menos una de dichas variables de entrada definen un vector de entrada de proceso y al menos una de dichas variables de salida definen un vector de salida de proceso y (k) , dicho aparato varía dicho vector de entrada de proceso de acuerdo con el valor de dicho vector de control u (k) , dicho sistema guía dicho vector de salida y (k) hacia un vector de consigna SP (k) , dicho computador controlador está configurado por conjuntos de instrucciones para operar como: a. Un controlador ADEX que opera en un dominio adaptativo predictivo y cuyo modelo adaptativo predictivo relaciona dinámicamente el vector de salida del proceso y (k) con un vector función integral U (k) del vector de control que se aplica al proceso, de forma que la salida de dicho controlador ADEX es dicho vector U (k) y se calcula para guiar dicho vector de salida del proceso hacia su vector de consigna SP (k) ; b. Un bloque integrador que actúa generando un segundo vector función integral Uk-i (k-1) del vector de control a aplicar al proceso hasta el instante k - 1. c. Un bloque diferencial que deriva dicho vector de control u (k) a partir de los vectores funciones integrales generados por dicho controlador ADEX y dicho bloque integrador. en el que dicho vector de control u (k) se aplica a dicho aparato de forma que dicho aparato varíe dicho vector de entrada del proceso de acuerdo con dicho vector de control. 4. Un sistema ADEX según la reivindicación 3, caracterizado por configurar los conjuntos de instrucciones a y b de la siguiente forma: a. Un controlador ADEX que opera en un dominio adaptativo predictivo y cuyo modelo adaptativo predictivo relaciona dinámicamente el vector de salida del proceso y (k) con un vector función integral de control U (k) , que representa una función integral de los valores de dicho vector de control u (k) entre dos instantes de control k+1-5 y k, siendo 5 > 2, de forma que la salida de dicho controlador ADEX es dicho vector U (k) y se calcula para guiar dicho vector de salida del proceso hacia su vector de consigna SP (k) ; b. Un bloque integrador que actúa generando un segundo vector función integral Uk-i (k-1) , que es una función integral de los valores de dicho control vector u (k) entre los dos instantes de control k +1-5 y k-1.
+ ES-2848475_B21. Procedimiento para generar un vector de control u (k) durante cada uno de una pluralidad de instantes de control k, dicho vector de control se aplica a un aparato que realiza un proceso con al menos una variable de entrada y al menos una variable de salida, al menos una de dichas variables de entrada define un vector de entrada de proceso y al menos una de dichas variables de salida define un vector de salida de proceso y (k) , dicho aparato varía dicho vector de entrada de proceso de acuerdo con el valor de dicho vector de control, dicho método guía dicho vector de salida del proceso hacia un vector de consigna SP (k) , dicho método caracterizado por comprender los siguientes pasos: (A) generar un vector función integral U (k) del vector de control que se aplica al proceso u (k) ejecutando la secuencia de operaciones de un controlador ADEX en uno de sus dominios adaptativos predictivos, cuyo modelo adaptativo predictivo relaciona el vector de salida del proceso y (k) con dicho vector función integral del vector de control, con el fin de conducir el vector de salida del proceso hacia su consigna SP (k) ; (B) calcular un segundo vector función integral Uk-i (k-1) del vector de control a aplicar al proceso hasta el instante k - 1; (C) calcular el vector de control a aplicar al proceso u (k) utilizando un operador diferencial que deriva dicho vector de control a partir de los vectores funciones integrales generados en los pasos previos (A) y (B) ; (D) aplicar dicho vector de control al aparato que realiza el proceso. 2. Procedimiento según la reivindicación 1, caracterizado por realizar los pasos (A) y (B) de la siguiente forma: (A) Generar un vector función integral de control U (k) , que representa una función integral de los valores de dicho vector de control u (k) entre dos instantes de control k+1-5 y k, siendo 5 > 2, utilizando un controlador ADEX que opera en un dominio adaptativo predictivo y cuyo modelo adaptativo predictivo relaciona dinámicamente el vector de salida del proceso y (k) con dicho vector función integral de control, de forma que la salida de dicho controlador ADEX s dicho vector U (k) y se calcula para guiar dicho vector de salida del proceso hacia su vector de consigna SP (k) ; (B) Generar un segundo vector función integral Uk-i (k -1) , mediante una función integral de los valores de dicho vector de control u (k) entre los dos instantes de control previos k+1-5 y k-1. 3. Un sistema ADEX que comprende un computador controlador para aplicar el procedimiento para generar un vector de control u (k) de cualquiera de las reivindicaciones 1 y 2, durante cada uno de una pluralidad de instantes de control k, dicho vector de control se aplica a un aparato que lleva a cabo un proceso con al menos una variable de entrada y al menos una variable de salida, al menos una de dichas variables de entrada definen un vector de entrada de proceso y al menos una de dichas variables de salida definen un vector de salida de proceso y (k) , dicho aparato varía dicho vector de entrada de proceso de acuerdo con el valor de dicho vector de control u (k) , dicho sistema guía dicho vector de salida y (k) hacia un vector de consigna SP (k) , dicho computador controlador está configurado por conjuntos de instrucciones para operar como: a. Un controlador ADEX que opera en un dominio adaptativo predictivo y cuyo modelo adaptativo predictivo relaciona dinámicamente el vector de salida del proceso y (k) con un vector función integral U (k) del vector de control que se aplica al proceso, de forma que la salida de dicho controlador ADEX es dicho vector U (k) y se calcula para guiar dicho vector de salida del proceso hacia su vector de consigna SP (k) ; b. Un bloque integrador que actúa generando un segundo vector función integral Uk-i (k-1) del vector de control a aplicar al proceso hasta el instante k - 1. c. Un bloque diferencial que deriva dicho vector de control u (k) a partir de los vectores funciones integrales generados por dicho controlador ADEX y dicho bloque integrador. en el que dicho vector de control u (k) se aplica a dicho aparato de forma que dicho aparato varíe dicho vector de entrada del proceso de acuerdo con dicho vector de control. 4. Un sistema ADEX según la reivindicación 3, caracterizado por configurar los conjuntos de instrucciones a y b de la siguiente forma: a. Un controlador ADEX que opera en un dominio adaptativo predictivo y cuyo modelo adaptativo predictivo relaciona dinámicamente el vector de salida del proceso y (k) con un vector función integral de control U (k) , que representa una función integral de los valores de dicho vector de control u (k) entre dos instantes de control k+1-5 y k, siendo 5 > 2, de forma que la salida de dicho controlador ADEX es dicho vector U (k) y se calcula para guiar dicho vector de salida del proceso hacia su vector de consigna SP (k) ; b. Un bloque integrador que actúa generando un segundo vector función integral Uk-i (k-1) , que es una función integral de los valores de dicho control vector u (k) entre los dos instantes de control k +1-5 y k-1.
Los productos y servicios protegidos por este registro son:
G05B 13/04 - G05B 21/00 - G05D 11/00
Descripciones:
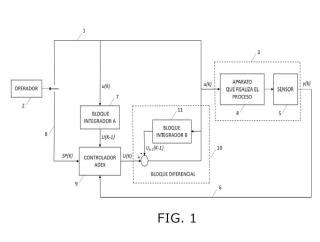
+ ES-2848475_A1 Procedimiento para generar un vector de control y sistema ADEX que lo aplica La invención se refiere a un sistema de control adaptativo predictivo experto, denominado sistema ADEX, que utiliza una función integral de la señal de control aplicada al proceso para controlar variables de salida de procesos monovariables o multivariables, donde los parámetros del proceso son conocidos o desconocidos y constantes o variables en el tiempo. El sistema ADEX de la presente invención implementa una estrategia de control en la cual un controlador adaptativo predictivo experto, denominado controlador ADEX, utiliza en sus dominios adaptativos predictivos un modelo adaptativo predictivo que relaciona dinámicamente la salida del proceso a controlar con una función integral de la señal de control que se aplica al proceso, en lugar de relacionar dinámicamente dicha salida del proceso con la señal que se aplica al proceso como hacen los controladores ADEX convencionales del estado del arte previo. De esta manera, la salida de dicho controlador ADEX es una función integral de la señal de control. A partir de esta función integral dicha estrategia de control utiliza un operador diferencial para calcular la acción de control real que se aplica al proceso. ESTADO DE LA TÉCNICA La invención se enmarca en el área de los sistemas de control digital que utilizan un computador que contiene un programa que se ejecuta periódicamente en una pluralidad de instantes de control k, para producir una señal de control que en cada uno de dichos instantes k se aplica al aparato que realiza el proceso para controlar la evolución de variables de salida del mismo. La invención, como procedimiento, define la secuencia de operaciones que determina dicho programa y, como sistema, define los conjuntos de instrucciones que se ejecutan de forma coherente con el soporte de dicho computador para calcular y aplicar la señal de control en cuestión al aparato que realiza el proceso. El libro "ADEX Optimized Adaptive Systems and Controllers: From Research to Industrial Practice", publicado por la editorial Springer en 2015, describe la metodología, la teoría de estabilidad y diversas aplicaciones de los controladores Adaptativos Predictivos Expertos, que fueron introducidos, definidos y descritos en detalle en la patente en EE. UU. No. 6.662.058 B1. Estos controladores representan una extensión metodológica de os controladores adaptativos predictivos definidos previamente en las patentes en EE.UU. Nos. 4, 197, 576 y 4, 358, 822. Dicho libro denomina a estos controladores como controladores ADEX y este documento utilizará por simplicidad la misma nomenclatura de controlador ADEX para los controladores descritos en las previamente mencionadas patentes en EE. UU. Como se describe en la patente de EE.UU. No. 6.662.058 B1, un controlador ADEX en sus dominios de operación denominados Adaptativos Predictivos, ajusta en cada instante de control los parámetros de un modelo adaptativo predictivo (AP) que identifica una relación dinámica entre las variables del proceso y una señal de control a aplicar al proceso; y utiliza dicho modelo AP para calcular la señal de control que debe aplicarse al proceso para que la predicción de la variable de salida del proceso a controlar sea igual a un valor deseado para dicha variable de salida del proceso. Los controladores ADEX pueden asimismo incluir dominios de operación denominados expertos, en los cuales la señal de control se genera mediante reglas que imitan la actuación del control manual realizado por un operador humano. Los controladores adaptativos predictivos descritos en las patentes en EE.UU. Nos. 4, 197, 576 y 4, 358, 822 pueden definirse como controladores ADEX que operan únicamente en un solo dominio adaptativo predictivo. En consecuencia, la referencia a controladores ADEX que se realiza en lo que sigue de este documento incluye también el conjunto de controladores adaptativos predictivos definidos en dichas patentes americanas, dado que la presente invención concierne únicamente a la aplicación de controladores ADEX en sus dominios adaptativos predictivos. Asimismo, dicho libro distingue claramente entre controladores ADEX y sistemas ADEX de la siguiente manera: mientras que un controlador ADEX se ha definido en la patente de EE. UU. No. 6.662.058 B1 y se utiliza para controlar variables de salida de un proceso, un sistema ADEX se define mediante una estrategia de control para un proceso en la que se utilizan controladores ADEX para lograr un mejor rendimiento global en la operación del proceso. En este caso, un sistema ADEX será innovador si la estrategia de control que lo define es innovadora. La invención está relacionada con un sistema ADEX para controlar variables de salida de procesos monovariables o multivariables mediante el uso de una estrategia de control que genera una función integral de la señal de control que se aplica al proceso en los distintos instantes de control y utiliza esta función integral de tal manera que el rendimiento de control obtenido para dichas variables de salida mejora significativamente, en un rango de períodos de control pequeños con respecto a la dinámica del proceso, el endimiento que se obtendría por la aplicación directa de un controlador ADEX convencional, perteneciente al estado del arte previamente patentado, en el mismo contexto de aplicación. Generalmente se denomina periodo de control al tiempo transcurrido entre dos instantes de control consecutivos en la operación de un controlador o de un sistema de control. En la aplicación de los controladores ADEX, el período de control se elige generalmente teniendo en cuenta la dinámica del proceso. Así pues, si el proceso tiene una dinámica lenta, el periodo de control se elegirá para este tipo de proceso más largo que el que se elegiría para un proceso con una dinámica más rápida. En general, el período de control se elige igual a un porcentaje del denominado tiempo de la respuesta natural del proceso, es decir, del tiempo que tarda el proceso en pasar de un estado de equilibrio a otro en respuesta a una entrada al proceso en escalón. Una elección razonable del periodo de control podría generalmente estar en un rango entre un décimo y un veinteavo del tiempo de respuesta natural del proceso. Con frecuencia, el período de control se determina por consideraciones prácticas, como puede ser la frecuencia de las perturbaciones que actúan sobre el proceso y cuyo efecto tiene que ser compensado por la señal de control. Esta clase de sistema ADEX es útil en una gran variedad de áreas donde el control de procesos es importante para el rendimiento económico de las plantas, tales como el área del cemento o la de la energía y, en general, en la industria. Ejemplos de procesos en los que este sistema ADEX se puede aplicar ventajosamente son los molinos de cemento, donde la finura del producto molido se controla mediante la entrada de caudal de Clinker, o las centrales eléctricas de carbón, donde la potencia generada se controla mediante la entrada de caudal de carbón. A menudo es difícil identificar una relación dinámica entre las variables de salida a controlar en este tipo de procesos y las entradas al proceso o señales de control, lo que explica el bajo rendimiento de control que generalmente obtienen en este contexto técnicas de control como la de los Controladores Avanzados Basados en Modelos, donde el modelo representa el resultado de tal identificación. Es sabido que los Controladores Avanzados Basados en Modelo utilizan una relación de entrada/salida (E/S) del proceso o modelo del proceso para predecir la evolución de las variables de salida del proceso. La fiabilidad de dicha predicción depende del valor de los parámetros del modelo del proceso, denominado modelo predictivo. Algunas soluciones requieren predeterminar el valor de dichos parámetros del modelo antes de que el controlador en cuestión inicie su operación de control automático; este es el caso de los llamados Controladores Predictivos Basados en Modelo. Otras soluciones de control, denominado adaptativo, actualizan un modelo del proceso en tiempo real por medio de un mecanismo de adaptación, de tal manera que los cambios que pueden ocurrir en la dinámica del proceso pueden incorporarse rápidamente en el modelo del proceso; al mismo tiempo dicho modelo del proceso, denominado en este caso modelo adaptativo predictivo, se utiliza para predecir la evolución de las variables de salida del proceso y para controlar el proceso. Este es el caso de los previamente mencionados controladores ADEX en sus dominios de operación adaptativos predictivos. Es sabido también que el valor de los parámetros de un modelo capaz de representar la dinámica de un proceso depende del período de control elegido. En consecuencia, tanto para los controladores predictivos basados en modelo como para los controladores ADEX, la elección del período de control determinará el rango de magnitud del valor de los parámetros del modelo predictivo o adaptativo predictivo. Se sabe que la elección del período de control por debajo de un cierto umbral de tiempo, denominado "umbral de modelado", que es relativamente pequeño con respecto al previamente mencionado tiempo de respuesta natural del proceso bajo control, hace que el valor de un conjunto de parámetros del modelo predictivo o adaptativo predictivo se aproxime en valor absoluto excesivamente a cero. Esto hace que estos parámetros aumenten su sensibilidad a cualquier pequeño error de identificación en su valor y, por lo tanto, el uso del valor de estos parámetros en la predicción de la evolución de la variable de salida del proceso bajo control y en el cálculo de la señal de control que se aplicará al proceso, puede deteriorar significativamente el rendimiento del controlador. Un escenario de control con períodos de control mayores que dicho umbral de modelado evitaría que dicho conjunto de parámetros del modelo predictivo o adaptativo predictivo se aproximara indeseablemente al valor cero y reduciría su sensibilidad a pequeños errores de identificación. Sin embargo, en la práctica, la elección de estos períodos de control más grandes puede no ser posible, ya que limitarían la precisión y la capacidad de reacción del sistema de control a perturbaciones que la señal de control no podría contrarrestar hasta el final del período de control. Por ejemplo, el período de control que generalmente se aplica para establecer los cambios en la alimentación de clínker de un molino de cemento generalmente es cercano a 30 segundos, y el período de control que generalmente se aplica para establecer los cambios en el caudal de carbón de una central eléctrica es de aproximadamente 1 minuto. En ambos casos, el período de control está por debajo del umbral de modelado. Por lo tanto, el rendimiento de control de dichos controladores avanzados basados en modelos, adaptativos o no adaptativos, es eneralmente subóptimo con un margen significativo de mejora bajo el período de control requerido por la práctica. También puede ocurrir que, cuando el período de control está por debajo de un cierto umbral de modelado, el modelo utilizado por el controlador avanzado sea de "orden reducido", es decir, que el número de parámetros de dicho modelo no sea suficiente para identificar satisfactoriamente la dinámica completa del proceso, lo que resultará en un rendimiento deficiente en la aplicación del controlador. En este caso, el aumentar el período de control sobre dicho umbral de modelado puede hacer que el número de parámetros del modelo utilizado en el controlador sea suficiente para lograr una identificación satisfactoria de la dinámica del proceso y, como resultado, un mejor rendimiento del control. Sin embargo, como se ha explicado anteriormente, la elección de un período de control por debajo del umbral de modelado puede ser obligatoria y puede deteriorar significativamente el rendimiento de control. BREVE DESCRIPCIÓN DE LA INVENCIÓN El sistema ADEX de la presente invención utiliza un computador digital para aplicar una estrategia de control de procesos en la cual se utiliza un controlador Adaptativo Predictivo Experto (ADEX) . Este controlador ADEX usa en sus dominios adaptativos predictivos un modelo adaptativo predictivo que relaciona dinámicamente la salida del proceso bajo control con una función integral de la señal de control que se aplica al proceso. De esta manera, la salida de dicho controlador ADEX no es la señal de control a aplicar al proceso como en el estado del arte previo, sino una función integral de la señal de control que debe aplicarse al proceso. A partir de esta función integral dicha estrategia de control utiliza un operador diferencial para calcular la acción de control real que se aplica al proceso. Así pues, el procedimiento de control de la invención, para el cálculo de la señal de control en cada instante k, está caracterizado por comprender las etapas de: 1) Generar una función integral de la señal de control que se aplica al proceso ejecutando la secuencia de operaciones de un controlador ADEX en uno de sus dominios adaptativos predictivos, cuyo modelo adaptativo predictivo relaciona la salida del proceso con dicha función integral de la señal de control, con el fin de conducir la salida del proceso hacia su consigna. 2) Calcular una segunda función integral de la señal de control a aplicar al proceso hasta el instante k - 1. 3) Calcular la señal de control a aplicar al proceso utilizando un operador diferencial que deriva dicha señal de control a partir de las funciones integrales previamente consideradas. 4) Aplicar dicha señal de control al aparato que realiza el proceso para controlar la evolución de sus variables de salida. Por su parte, el sistema ADEX que aplica este procedimiento comprende un computador controlador para generar la señal de control que se aplica en cada instante k al aparato que realiza el proceso, que está configurado por conjuntos de instrucciones y medios para operar como: a. Un controlador ADEX que opera en un dominio adaptativo predictivo y cuyo modelo adaptativo predictivo relaciona dinámicamente la salida del proceso a controlar con una función integral de la señal de control a aplicar al proceso, de forma que la salida de dicho controlador ADEX es dicha función integral de la señal de control y se calcula para guiar dicha salida del proceso hacia su punto de consigna; b. Un bloque integrador que genera una segunda función integral de la señal de control a aplicar al proceso hasta el instante k - 1; c. Un bloque diferencial que calcula dicha señal de control a aplicar al proceso a partir de las dos funciones integrales previamente consideradas; d. Medios que aplican dicha señal de control al aparato que realiza el proceso para controlar la evolución de las variables de salida del mismo. BREVE DESCRIPCIÓN DE LOS DIBUJOS Para una mejor comprensión de la invención, se incluyen las siguientes figuras, que representan un ejemplo de realización y que no deben ser consideradas más que como una forma de ilustrar y aclarar la invención. La FIG. 1 muestra la estructura general y conceptual de un sistema ADEX con función integral de control según una realización. La FIG. 2 muestra un gráfico de curvas de tendencia durante dos períodos consecutivos de tiempo. Durante un período inicial de 6 minutos, las curvas de tendencia representan el resultado de una aplicación directa de un controlador ADEX con un período de control por debajo del umbral de modelado a un proceso simulado. Durante un segundo período e 6 minutos, las curvas de tendencia continúan representando el resultado de la aplicación directa del mismo controlador ADEX a dicho proceso simulado, pero en este segundo período el período de control de este controlador ADEX se ha cambiado a un valor sobre el umbral de modelado. Las curvas de tendencia en la parte superior de la figura representan la evolución de salida del proceso (línea gruesa) y su punto de consigna (línea fina) , la escala para ambas curvas está en el eje de ordenadas del lado izquierdo. La curva de tendencia en el medio representa la señal de control generada por el controlador ADEX y aplicada al proceso, la escala está en el eje de ordenadas del lado derecho. La curva de tendencia en la parte inferior es solo para indicar cuándo se ha cambiado el período de control. La FIG. 3 también muestra un gráfico de curvas de tendencia durante dos períodos de tiempo consecutivos. Los resultados presentados en el período inicial de 6 minutos son equivalentes a los presentados en el período inicial de la FIG. 2, es decir, el resultado de una aplicación directa del mismo controlador ADEX de la FIG.2 con un período de control por debajo del umbral de modelado al mismo proceso simulado. Durante el segundo período de 6 minutos, la señal de control aplicada al proceso se cambia a la generada por un sistema ADEX con función integral de control de la presente invención y el período de control se mantiene igual al utilizado durante el período inicial. Las curvas de tendencia tienen un significado equivalente a las de la FIG. 2. MODOS DE REALIZACIÓN DE LA INVENCIÓN A continuación, se describe de manera breve una forma de realización de la invención, como ejemplo ilustrativo y no limitativo de ésta. En cualquier instante de control k, el operador humano puede optar por aplicar control manual o control automático a la variable de proceso que se desea controlar; ambas formas de control se muestran en la FIG. 1 y se describen con referencia a dicha figura a continuación: 1. Control manual: bajo control manual, la señal de control u ( k ) se aplica directamente desde el operador (2) al aparato (4) que lleva a cabo el proceso que se está controlando y al bloque integrador A (7) como se muestra en el camino (1) . Un sensor (5) asociado al aparato (4) mide la variable de salida del proceso y (k) a controlar. Esta variable y (k) se aplica como variable de salida del proceso a controlar, como se muestra en el camino (6) , al controlador ADEX (9) . El bloque integrador A (7) calcula una función integral de control en k-1, U (k-1) , integrando icha señal de control u (k) entre dos instantes de control previos, k-5 y k-1, donde 5 es un número entero que representa el intervalo de integración en períodos de control, siendo 5 > 2. Dicha función integral de control en k-1, U (k-1) , se aplica como salida del controlador en k-1 al Controlador ADEX (9) . Por lo tanto, bajo control manual, el Controlador ADEX (9) recibe como entradas: 1) dicha variable de salida del proceso y (k) , y 2) dicha función integral de control en k-1, U (k-1) . Esto permite que el Controlador ADEX (9) funcione en el modo de identificación para dominios adaptativos predictivos (AP) descrito en la patente estadounidense No. US 6, 662, 058 B1. Dicho modo de identificación ajustará los parámetros del modelo adaptativo predictivo (AP) para el dominio operativo correspondiente del controlador ADEX (9) , de tal manera que dicho modelo AP representará una relación dinámica entre dicha variable de salida del proceso y (k) y dicha función integral de control U (k-1) y, por lo tanto, será capaz de predecir valores futuros de dicha variable de salida de proceso y (k) en función de una secuencia futura de valores de dicha función integral de control U (k-1) . Control automático: bajo control automático, el valor de la consigna SP (k) para la variable de salida del proceso y (k) se aplica directamente desde el operador (2) al Controlador ADEX (9) , como se muestra en el camino (8) . Asimismo, la variable de salida de proceso medida y (k) se aplica al controlador ADEX (9) desde el sensor (5) como se muestra en el camino (6) . Esto permite que el Controlador ADEX (9) funcione en el modo automático para dominios adaptativos predictivos (AP) descrito en la patente estadounidense No. US 6, 662, 058 B1. En dicho modo automático, a partir de la variable de salida del proceso y (k) y su consigna SP (k) , el controlador ADEX (9) genera como salida del controlador una función integral de control en k , U (k) , que en este caso representa la integración de dicha señal de control del proceso u (k) entre dos instantes de control, k+1-5 y k. La salida U (k) del Controlador ADEX (9) se aplica al Bloque Diferencial (10) que calcula la señal de control u (k) que se aplica al proceso. El bloque integrador B (11) calcula una segunda función integral Uk+ (k-1) integrando dicha señal de control u (k) entre los instantes de control previos, k+1-5 y k-1. Dicha segunda función integral Uk-1 (k-1) se resta de dicha función integral de control en k, U (k) , dentro del bloque diferencial (10) para generar la señal de control u (k) que se aplica al aparato (4) que lleva a cabo el proceso que se está controlando. Las operaciones específicas que el Sistema ADEX de esta invención llevará a cabo en cada instante de control k para controlar automáticamente la variable de salida del proceso y (k) se describen a continuación: (a) Medición por el sensor (5) de la variable de salida del proceso realizado por el aparato (4) para obtener la variable de salida del proceso y (k) a controlar. (b) Cálculo de la función integral de control en k, U (k) , por el controlador ADEX (9) como salida del controlador. Este controlador calcula la función integral de control U (k) a partir del valor de la salida del proceso a controlar, y (k) , y el valor de su consigna en k, SP (K) , aplicado directamente desde el operador (2) al Controlador ADEX (9) , y ejecutando la secuencia de operaciones descrita en la patente de EE. UU. No. 6, 662, 058 B1 para controladores ADEX en dominios de operación adaptativos predictivos. (c) Cálculo de dicha segunda función integral Uk-i (k-1) por medio de la ecuación que determina la operación del bloque integrador B (11) dentro del bloque diferencial: donde Uk-i (k -1) se obtiene integrando las señales de control previas u (k) desde el instante k-1 al instante k+1-5, y 5 > 2 es un entero seleccionado convenientemente por el diseñador del sistema ADEX. (d) Cálculo de la señal de control u (k) en el bloque diferencial por medio de: u (k) = U (k) - Uk-1 (k-1) (2) (e) Aplicación de la señal de control u (k) al aparato que realiza el proceso. En su implementación, el Sistema ADEX de la presente invención puede aplicarse a una variable de salida de proceso escalar, y (k) , como se consideró anteriormente, o a un vector de salida de proceso, y (k) , compuesto de n componentes de salida escalares, que son n variables escalares de salida del proceso. En este caso, el sistema ADEX se puede aplicar a cada una de dichas n componentes escalares del vector de salida del proceso, como se describió anteriormente, pero teniendo en cuenta la naturaleza multivariable del proceso, dicho controlador ADEX puede ser un controlador multivariable ADEX que guía dicho vector de salida de proceso y (k) hacia su vector de consigna SP (k) . Dicho controlador ADEX multivariable calcula como su salida un vector función integral de ontrol en k, U (k) , que se aplicará a un bloque diferencial multivariable en el que un bloque integrador calculará un segundo vector función integral Uk-i (k-1) por medio de: Uk.i (k-1) = ZfzTi1 u (k i) , 5 > 2 (3) donde u (k - i) es el vector de control que se ha aplicado en los instantes k - i al aparato que desarrolla el proceso y el vector de control u (k ) , que se aplica al aparato que desarrolla el proceso en el instante k, se calcula en dicho bloque diferencial por medio de: u (k) = U (k) - Uk-i (k-1) (4) EJEMPLO El rendimiento del sistema ADEX con función integral de la señal de control de la presente invención se ilustrará controlando un proceso simulado mono variable, con una entrada, u ( k ) , y una salida, y ( k ) , ambas en el instante k, que se miden como incrementos de sus valores cuando el proceso esta en estado de equilibrio, considerando que el proceso está en equilibrio cuando ambas variables de entrada y salida son iguales a cero. Cuando el período de control es igual a 1 segundo, la dinámica del proceso simulado puede describirse mediante la siguiente ecuación: y (k) = y (k) + 0.1 u (k 1) + o.1 u (k 2) + 0.2 u (k 3) + 0.2 u (k 4) (5) Para ilustrar el rendimiento del sistema ADEX de la invención, el proceso simulado se controlará en los diferentes escenarios que se describen a continuación: En un primer escenario, se utiliza para controlar el proceso simulado un controlador ADEX que opera en un dominio adaptativo predictivo, usando la secuencia de operaciones descrita en US6662058B1 y con un período de control de 1 segundo y un horizonte de predicción de 5 períodos de control. Los parámetros del bloque conductor del controlador ADEX, que genera la trayectoria deseada para la salida del proceso, son iguales a los de un modelo de segundo orden con una constante de tiempo igual a 1, 5 períodos de control, una ganancia y una relación de amortiguamiento igual a 1, y el modelo adaptativo predictivo (AP) , que relaciona la salida del proceso con la señal de control, es de primer orden con dos parámetros, de forma que calcula la estimación a priori de la salida del proceso en el instante k, y (kik 1) , mediante la ecuación: y (klk Como se describe en las patentes previamente citadas, el mecanismo de adaptación del controlador ADEX ajustará los parámetros de este modelo para hacer que dicha estimación a priori de la salida del proceso converja hacia la salida del proceso misma. Utilizando este mismo modelo AP, la predicción de la salida del proceso en el instante k + 1, y (k + 1ik) , a partir de la señal de control u (k) aplicada en el instante k viene dada por: La señal de control u (k) generada por el controlador ADEX en el instante k hará la salida predicha del proceso en el instante k + 1, y (k + 1ik) , igual a la salida deseada generada en el instante k por el bloque conductor para ese mismo instante k + 1, yd (k + 1ik) . Por lo tanto, igualando dicha salida deseada a dicha salida predicha en la ecuación (7) y despejando, u (k) verificará la siguiente ecuación: En un segundo escenario, se utiliza para controlar el proceso simulado un controlador ADEX que opera en un dominio adaptativo predictivo, con la secuencia de operaciones de la patente US6662058B1, que tiene la misma configuración que el controlador ADEX del primer escenario, salvo que el período de control es igual a 2 segundos. Finalmente, en un tercer escenario, se utiliza para controlar el proceso simulado una realización del sistema ADEX con función integral de la señal de control, que se ha descrito previamente para ilustrar la invención, con un valor de 5, que determina el horizonte para el cálculo de la función integral de la señal de control, igual a 10, y un controlador ADEX que tiene la misma configuración que la del controlador ADEX considerado en el primer escenario, y un modelo adaptativo predictivo que, de acuerdo con la invención, relaciona dinámicamente la salida del proceso con dicha función integral de la señal de control U (k) , de forma que en este caso calcula la estimación a priori de la salida del proceso en el instante k, y (kik 1) , mediante la ecuación: Utilizando este mismo modelo AP la salida del controlador ADEX en el instante k, U (k) , verificará la siguiente ecuación: Donde, análogamente a la ecuación (8) , yd (k + 1ik) es el valor de la trayectoria deseada para la salida del proceso en el instante de control k + 1. El modelo AP descrito por la ecuación (6) , que estima la salida del proceso y (k) y opera con un período de control de 1 segundo, tiene un orden reducido con respecto a la ecuación (5) , que representa la dinámica del proceso cuando el período de control también es de 1 segundo. Para este período de control de 1 segundo, el modelo AP de la ecuación (6) no tiene la estructura paramétrica adecuada para permitir que el mecanismo de adaptación del controlador ADEX pueda realizar la identificación de la dinámica del proceso descrito por la ecuación (5) , porque en la ecuación (6) solo hay 2 parámetros bi (k - 1) , y necesitaría tener otros 2 parámetros: S3 (k-1) y S4 (k-1) . Cuando el período de control es igual a 2 segundos, la dinámica del proceso simulado se puede describir mediante una ecuación del mismo orden que el modelo AP de la ecuación (6) , es decir, con el mismo número de parámetros. En este caso, el mecanismo de adaptación del controlador ADEX será capaz de identificar satisfactoriamente la dinámica del proceso utilizando el modelo AP descrito por la ecuación (6) . Por lo tanto, el período de control de 1 segundo está por debajo del umbral de modelado para un controlador ADEX que utiliza el modelo AP de la ecuación (6) y no se puede esperar un rendimiento de control satisfactorio. Sin embargo, si el período de control se incrementa a 2 segundos, el mismo controlador ADEX puede lograr una buena identificación de la dinámica del proceso y, como resultado, un rendimiento de control satisfactorio, es decir, el período de control de 2 segundos está por encima del umbral de modelado. Sin embargo, gracias a la invención es posible obtener un rendimiento de control satisfactorio a pesar de usar un período de control por debajo del umbral de modelado. Las curvas de evolución de la FIG. 2 presentan los resultados obtenidos en la aplicación del controlador ADEX, con un periodo de control de 1 segundo descrito en el primer escenario, al proceso simulado durante los primeros 6 minutos del experimento. Durante los segundos 6 minutos, se muestran los resultados los resultados obtenidos por el mismo controlador ADEX cuando el periodo de control es de 2 segundos. Las curvas de evolución en la parte superior de la figura representan la evolución de salida del proceso (línea gruesa) y su punto de consigna (línea fina) ; la escala se muestra en el eje izquierdo de las ordenadas. La curva de evolución en la parte inferior representa la señal de control generada por el controlador ADEX con periodos de control de 1 y 2 segundos y aplicada al proceso, su escala está representada en el eje derecho de ordenadas. La curva en la ase de la figura solo indica el instante en el que se produce el cambio en el período de control. Las curvas de evolución de la FIG. 3 presentan los resultados obtenidos en la aplicación del controlador ADEX, con un periodo de control de 1 segundo, al proceso simulado durante los primeros 6 minutos del experimento y, durante los segundos 6 minutos, los resultados obtenidos cuando la señal de control de dicho controlador se cambia por la señal de control al proceso generada por el sistema ADEX con función integral de control de la invención con un periodo de control también de 1 segundo. Las curvas de evolución y las escalas son equivalentes a las descritas para la FIG.2. Los resultados presentados en los primeros 6 minutos de la FIG. 2 muestran cómo la aplicación convencional, perteneciente al estado del arte previo, de un controlador ADEX que utiliza un período de control de 1 segundo, por debajo del umbral de modelado, no obtiene un rendimiento de control satisfactorio. Es decir, la salida del proceso bajo control oscila con una gran amplitud alrededor de su punto de consigna y la señal de control también oscila de manera similar, sin ninguna perspectiva para que el proceso se acerque a la estabilidad. Sin embargo, como se muestra por los resultados presentados en los segundos 6 minutos de la FIG. 2, cuando el mismo controlador ADEX empieza a utilizar un período de control de 2 segundos, sobre el umbral de modelado, la salida del proceso deja de oscilar y converge hacia el punto de consigna siguiendo una trayectoria de salida deseada. Además, los cambios posteriores en el punto de consigna hacen que la salida del proceso los alcance y se estabilice en ellos siguiendo asimismo una trayectoria de salida deseada, demostrando un rendimiento de control satisfactorio. Esta trayectoria deseada corresponde a la configuración del bloque conductor del controlador ADEX, que se ha descrito previamente. Los resultados presentados en los segundos 6 minutos de la FIG. 3 demuestran que un sistema ADEX con función integral de control puede obtener un rendimiento de control satisfactorio utilizando un período de control de 1 segundo, por debajo del umbral de modelado del controlador ADEX convencional utilizado en los primeros 6 minutos de esta misma figura. Desde el principio, la salida del proceso sigue una trayectoria deseada para alcanzar el punto de consigna y se estabiliza en él. Este rendimiento de control satisfactorio se reproduce en los cambios de consigna posteriores. También en este caso, esta trayectoria deseada corresponde a la configuración del bloque conductor del controlador ADEX, que se ha descrito previamente. Puede observarse que las trayectorias deseadas convergen hacia la consigna de forma mucho más rápida cuando la salida del proceso es controlada con un período de control e 1 segundo por el sistema ADEX con función integral de control (FIG. 3) , que cuando la salida del proceso es controlada por el controlador ADEX convencional con un período de control de 2 segundos (FIG. 2) . La razón es que el bloque conductor de un controlador ADEX genera la trayectoria deseada dependiendo del período de control, de forma que cuanto más corto es el período de control más rápidamente la trayectoria deseada de la salida del proceso bajo control se aproxima a su consigna. Como se ilustra en este ejemplo de simulación, el uso de sistemas ADEX con función integral de control permitirá obtener un rendimiento de control satisfactorio utilizando períodos de control por debajo de los umbrales de modelado de los controladores ADEX convencionales. El uso de estos períodos de control "cortos" es obligatorio para una amplia variedad de procesos industriales y, por lo tanto, el uso de sistemas ADEX con función integral de control representa un avance significativo en el rendimiento de control para este tipo de procesos industriales.
+ ES-2848475_B2 Procedimiento para generar un vector de control y sistema ADEX que lo aplica La invención se refiere a un sistema de control adaptativo predictivo experto, denominado sistema ADEX, que utiliza una función integral de la señal de control aplicada al proceso para controlar variables de salida de procesos monovariables o multivariables, donde los parámetros del proceso son conocidos o desconocidos y constantes o variables en el tiempo. El sistema ADEX de la presente invención implementa una estrategia de control en la cual un controlador adaptativo predictivo experto, denominado controlador ADEX, utiliza en sus dominios adaptativos predictivos un modelo adaptativo predictivo que relaciona dinámicamente la salida del proceso a controlar con una función integral de la señal de control que se aplica al proceso, en lugar de relacionar dinámicamente dicha salida del proceso con la señal que se aplica al proceso como hacen los controladores ADEX convencionales del estado del arte previo. De esta manera, la salida de dicho controlador ADEX es una función integral de la señal de control. A partir de esta función integral dicha estrategia de control utiliza un operador diferencial para calcular la acción de control real que se aplica al proceso. ESTADO DE LA TÉCNICA La invención se enmarca en el área de los sistemas de control digital que utilizan un computador que contiene un programa que se ejecuta periódicamente en una pluralidad de instantes de control k, para producir una señal de control que en cada uno de dichos instantes k se aplica al aparato que realiza el proceso para controlar la evolución de variables de salida del mismo. La invención, como procedimiento, define la secuencia de operaciones que determina dicho programa y, como sistema, define los conjuntos de instrucciones que se ejecutan de forma coherente con el soporte de dicho computador para calcular y aplicar la señal de control en cuestión al aparato que realiza el proceso. El libro "ADEX Optimized Adaptive Systems and Controllers: From Research to Industrial Practice", publicado por la editorial Springer en 2015, describe la metodología, la teoría de estabilidad y diversas aplicaciones de los controladores Adaptativos Predictivos Expertos, que fueron introducidos, definidos y descritos en detalle en la patente en EE. UU. No. 6.662.058 B1. Estos controladores representan una extensión metodológica de os controladores adaptativos predictivos definidos previamente en las patentes en EE.UU. Nos. 4, 197, 576 y 4, 358, 822. Dicho libro denomina a estos controladores como controladores ADEX y este documento utilizará por simplicidad la misma nomenclatura de controlador ADEX para los controladores descritos en las previamente mencionadas patentes en EE. UU. Como se describe en la patente de EE.UU. No. 6.662.058 B1, un controlador ADEX en sus dominios de operación denominados Adaptativos Predictivos, ajusta en cada instante de control los parámetros de un modelo adaptativo predictivo (AP) que identifica una relación dinámica entre las variables del proceso y una señal de control a aplicar al proceso; y utiliza dicho modelo AP para calcular la señal de control que debe aplicarse al proceso para que la predicción de la variable de salida del proceso a controlar sea igual a un valor deseado para dicha variable de salida del proceso. Los controladores ADEX pueden asimismo incluir dominios de operación denominados expertos, en los cuales la señal de control se genera mediante reglas que imitan la actuación del control manual realizado por un operador humano. Los controladores adaptativos predictivos descritos en las patentes en EE.UU. Nos. 4, 197, 576 y 4, 358, 822 pueden definirse como controladores ADEX que operan únicamente en un solo dominio adaptativo predictivo. En consecuencia, la referencia a controladores ADEX que se realiza en lo que sigue de este documento incluye también el conjunto de controladores adaptativos predictivos definidos en dichas patentes americanas, dado que la presente invención concierne únicamente a la aplicación de controladores ADEX en sus dominios adaptativos predictivos. Asimismo, dicho libro distingue claramente entre controladores ADEX y sistemas ADEX de la siguiente manera: mientras que un controlador ADEX se ha definido en la patente de EE. UU. No. 6.662.058 B1 y se utiliza para controlar variables de salida de un proceso, un sistema ADEX se define mediante una estrategia de control para un proceso en la que se utilizan controladores ADEX para lograr un mejor rendimiento global en la operación del proceso. En este caso, un sistema ADEX será innovador si la estrategia de control que lo define es innovadora. La invención está relacionada con un sistema ADEX para controlar variables de salida de procesos monovariables o multivariables mediante el uso de una estrategia de control que genera una función integral de la señal de control que se aplica al proceso en los distintos instantes de control y utiliza esta función integral de tal manera que el rendimiento de control obtenido para dichas variables de salida mejora significativamente, en un rango de períodos de control pequeños con respecto a la dinámica del proceso, el endimiento que se obtendría por la aplicación directa de un controlador ADEX convencional, perteneciente al estado del arte previamente patentado, en el mismo contexto de aplicación. Generalmente se denomina periodo de control al tiempo transcurrido entre dos instantes de control consecutivos en la operación de un controlador o de un sistema de control. En la aplicación de los controladores ADEX, el período de control se elige generalmente teniendo en cuenta la dinámica del proceso. Así pues, si el proceso tiene una dinámica lenta, el periodo de control se elegirá para este tipo de proceso más largo que el que se elegiría para un proceso con una dinámica más rápida. En general, el período de control se elige igual a un porcentaje del denominado tiempo de la respuesta natural del proceso, es decir, del tiempo que tarda el proceso en pasar de un estado de equilibrio a otro en respuesta a una entrada al proceso en escalón. Una elección razonable del periodo de control podría generalmente estar en un rango entre un décimo y un veinteavo del tiempo de respuesta natural del proceso. Con frecuencia, el período de control se determina por consideraciones prácticas, como puede ser la frecuencia de las perturbaciones que actúan sobre el proceso y cuyo efecto tiene que ser compensado por la señal de control. Esta clase de sistema ADEX es útil en una gran variedad de áreas donde el control de procesos es importante para el rendimiento económico de las plantas, tales como el área del cemento o la de la energía y, en general, en la industria. Ejemplos de procesos en los que este sistema ADEX se puede aplicar ventajosamente son los molinos de cemento, donde la finura del producto molido se controla mediante la entrada de caudal de Clinker, o las centrales eléctricas de carbón, donde la potencia generada se controla mediante la entrada de caudal de carbón. A menudo es difícil identificar una relación dinámica entre las variables de salida a controlar en este tipo de procesos y las entradas al proceso o señales de control, lo que explica el bajo rendimiento de control que generalmente obtienen en este contexto técnicas de control como la de los Controladores Avanzados Basados en Modelos, donde el modelo representa el resultado de tal identificación. Es sabido que los Controladores Avanzados Basados en Modelo utilizan una relación de entrada/salida (E/S) del proceso o modelo del proceso para predecir la evolución de las variables de salida del proceso. La fiabilidad de dicha predicción depende del valor de los parámetros del modelo del proceso, denominado modelo predictivo. Algunas soluciones requieren predeterminar el valor de dichos parámetros del modelo antes de que el controlador en cuestión inicie su operación de control automático; este es el caso de los llamados Controladores Predictivos Basados en Modelo. Otras soluciones de control, denominado adaptativo, actualizan un modelo del proceso en tiempo real por medio de un mecanismo de adaptación, de tal manera que los cambios que pueden ocurrir en la dinámica del proceso pueden incorporarse rápidamente en el modelo del proceso; al mismo tiempo dicho modelo del proceso, denominado en este caso modelo adaptativo predictivo, se utiliza para predecir la evolución de las variables de salida del proceso y para controlar el proceso. Este es el caso de los previamente mencionados controladores ADEX en sus dominios de operación adaptativos predictivos. Es sabido también que el valor de los parámetros de un modelo capaz de representar la dinámica de un proceso depende del período de control elegido. En consecuencia, tanto para los controladores predictivos basados en modelo como para los controladores ADEX, la elección del período de control determinará el rango de magnitud del valor de los parámetros del modelo predictivo o adaptativo predictivo. Se sabe que la elección del período de control por debajo de un cierto umbral de tiempo, denominado "umbral de modelado", que es relativamente pequeño con respecto al previamente mencionado tiempo de respuesta natural del proceso bajo control, hace que el valor de un conjunto de parámetros del modelo predictivo o adaptativo predictivo se aproxime en valor absoluto excesivamente a cero. Esto hace que estos parámetros aumenten su sensibilidad a cualquier pequeño error de identificación en su valor y, por lo tanto, el uso del valor de estos parámetros en la predicción de la evolución de la variable de salida del proceso bajo control y en el cálculo de la señal de control que se aplicará al proceso, puede deteriorar significativamente el rendimiento del controlador. Un escenario de control con períodos de control mayores que dicho umbral de modelado evitaría que dicho conjunto de parámetros del modelo predictivo o adaptativo predictivo se aproximara indeseablemente al valor cero y reduciría su sensibilidad a pequeños errores de identificación. Sin embargo, en la práctica, la elección de estos períodos de control más grandes puede no ser posible, ya que limitarían la precisión y la capacidad de reacción del sistema de control a perturbaciones que la señal de control no podría contrarrestar hasta el final del período de control. Por ejemplo, el período de control que generalmente se aplica para establecer los cambios en la alimentación de clínker de un molino de cemento generalmente es cercano a 30 segundos, y el período de control que generalmente se aplica para establecer los cambios en el caudal de carbón de una central eléctrica es de aproximadamente 1 minuto. En ambos casos, el período de control está por debajo del umbral de modelado. Por lo tanto, el rendimiento de control de dichos controladores avanzados basados en modelos, adaptativos o no adaptativos, es eneralmente subóptimo con un margen significativo de mejora bajo el período de control requerido por la práctica. También puede ocurrir que, cuando el período de control está por debajo de un cierto umbral de modelado, el modelo utilizado por el controlador avanzado sea de "orden reducido", es decir, que el número de parámetros de dicho modelo no sea suficiente para identificar satisfactoriamente la dinámica completa del proceso, lo que resultará en un rendimiento deficiente en la aplicación del controlador. En este caso, el aumentar el período de control sobre dicho umbral de modelado puede hacer que el número de parámetros del modelo utilizado en el controlador sea suficiente para lograr una identificación satisfactoria de la dinámica del proceso y, como resultado, un mejor rendimiento del control. Sin embargo, como se ha explicado anteriormente, la elección de un período de control por debajo del umbral de modelado puede ser obligatoria y puede deteriorar significativamente el rendimiento de control. BREVE DESCRIPCIÓN DE LA INVENCIÓN El sistema ADEX de la presente invención utiliza un computador digital para aplicar una estrategia de control de procesos en la cual se utiliza un controlador Adaptativo Predictivo Experto (ADEX) . Este controlador ADEX usa en sus dominios adaptativos predictivos un modelo adaptativo predictivo que relaciona dinámicamente la salida del proceso bajo control con una función integral de la señal de control que se aplica al proceso. De esta manera, la salida de dicho controlador ADEX no es la señal de control a aplicar al proceso como en el estado del arte previo, sino una función integral de la señal de control que debe aplicarse al proceso. A partir de esta función integral dicha estrategia de control utiliza un operador diferencial para calcular la acción de control real que se aplica al proceso. Así pues, el procedimiento de control de la invención, para el cálculo de la señal de control en cada instante k, está caracterizado por comprender las etapas de: 1) Generar una función integral de la señal de control que se aplica al proceso ejecutando la secuencia de operaciones de un controlador ADEX en uno de sus dominios adaptativos predictivos, cuyo modelo adaptativo predictivo relaciona la salida del proceso con dicha función integral de la señal de control, con el fin de conducir la salida del proceso hacia su consigna. 2) Calcular una segunda función integral de la señal de control a aplicar al proceso hasta el instante k - 1. 3) Calcular la señal de control a aplicar al proceso utilizando un operador diferencial que deriva dicha señal de control a partir de las funciones integrales previamente consideradas. 4) Aplicar dicha señal de control al aparato que realiza el proceso para controlar la evolución de sus variables de salida. Por su parte, el sistema ADEX que aplica este procedimiento comprende un computador controlador para generar la señal de control que se aplica en cada instante k al aparato que realiza el proceso, que está configurado por conjuntos de instrucciones y medios para operar como: a. Un controlador ADEX que opera en un dominio adaptativo predictivo y cuyo modelo adaptativo predictivo relaciona dinámicamente la salida del proceso a controlar con una función integral de la señal de control a aplicar al proceso, de forma que la salida de dicho controlador ADEX es dicha función integral de la señal de control y se calcula para guiar dicha salida del proceso hacia su punto de consigna; b. Un bloque integrador que genera una segunda función integral de la señal de control a aplicar al proceso hasta el instante k - 1; c. Un bloque diferencial que calcula dicha señal de control a aplicar al proceso a partir de las dos funciones integrales previamente consideradas; d. Medios que aplican dicha señal de control al aparato que realiza el proceso para controlar la evolución de las variables de salida del mismo. BREVE DESCRIPCIÓN DE LOS DIBUJOS Para una mejor comprensión de la invención, se incluyen las siguientes figuras, que representan un ejemplo de realización y que no deben ser consideradas más que como una forma de ilustrar y aclarar la invención. La FIG. 1 muestra la estructura general y conceptual de un sistema ADEX con función integral de control según una realización. La FIG. 2 muestra un gráfico de curvas de tendencia durante dos períodos consecutivos de tiempo. Durante un período inicial de 6 minutos, las curvas de tendencia representan el resultado de una aplicación directa de un controlador ADEX con un período de control por debajo del umbral de modelado a un proceso simulado. Durante un segundo período e 6 minutos, las curvas de tendencia continúan representando el resultado de la aplicación directa del mismo controlador ADEX a dicho proceso simulado, pero en este segundo período el período de control de este controlador ADEX se ha cambiado a un valor sobre el umbral de modelado. Las curvas de tendencia en la parte superior de la figura representan la evolución de salida del proceso (línea gruesa) y su punto de consigna (línea fina) , la escala para ambas curvas está en el eje de ordenadas del lado izquierdo. La curva de tendencia en el medio representa la señal de control generada por el controlador ADEX y aplicada al proceso, la escala está en el eje de ordenadas del lado derecho. La curva de tendencia en la parte inferior es solo para indicar cuándo se ha cambiado el período de control. La FIG. 3 también muestra un gráfico de curvas de tendencia durante dos períodos de tiempo consecutivos. Los resultados presentados en el período inicial de 6 minutos son equivalentes a los presentados en el período inicial de la FIG. 2, es decir, el resultado de una aplicación directa del mismo controlador ADEX de la FIG.2 con un período de control por debajo del umbral de modelado al mismo proceso simulado. Durante el segundo período de 6 minutos, la señal de control aplicada al proceso se cambia a la generada por un sistema ADEX con función integral de control de la presente invención y el período de control se mantiene igual al utilizado durante el período inicial. Las curvas de tendencia tienen un significado equivalente a las de la FIG. 2. MODOS DE REALIZACIÓN DE LA INVENCIÓN A continuación, se describe de manera breve una forma de realización de la invención, como ejemplo ilustrativo y no limitativo de ésta. En cualquier instante de control k, el operador humano puede optar por aplicar control manual o control automático a la variable de proceso que se desea controlar; ambas formas de control se muestran en la FIG. 1 y se describen con referencia a dicha figura a continuación: 1. Control manual: bajo control manual, la señal de control u ( k ) se aplica directamente desde el operador (2) al aparato (4) que lleva a cabo el proceso que se está controlando y al bloque integrador A (7) como se muestra en el camino (1) . Un sensor (5) asociado al aparato (4) mide la variable de salida del proceso y (k) a controlar. Esta variable y (k) se aplica como variable de salida del proceso a controlar, como se muestra en el camino (6) , al controlador ADEX (9) . El bloque integrador A (7) calcula una función integral de control en k-1, U (k-1) , integrando icha señal de control u (k) entre dos instantes de control previos, k-5 y k-1, donde 5 es un número entero que representa el intervalo de integración en períodos de control, siendo 5 > 2. Dicha función integral de control en k-1, U (k-1) , se aplica como salida del controlador en k-1 al Controlador ADEX (9) . Por lo tanto, bajo control manual, el Controlador ADEX (9) recibe como entradas: 1) dicha variable de salida del proceso y (k) , y 2) dicha función integral de control en k-1, U (k-1) . Esto permite que el Controlador ADEX (9) funcione en el modo de identificación para dominios adaptativos predictivos (AP) descrito en la patente estadounidense No. US 6, 662, 058 B1. Dicho modo de identificación ajustará los parámetros del modelo adaptativo predictivo (AP) para el dominio operativo correspondiente del controlador ADEX (9) , de tal manera que dicho modelo AP representará una relación dinámica entre dicha variable de salida del proceso y (k) y dicha función integral de control U (k-1) y, por lo tanto, será capaz de predecir valores futuros de dicha variable de salida de proceso y (k) en función de una secuencia futura de valores de dicha función integral de control U (k-1) . Control automático: bajo control automático, el valor de la consigna SP (k) para la variable de salida del proceso y (k) se aplica directamente desde el operador (2) al Controlador ADEX (9) , como se muestra en el camino (8) . Asimismo, la variable de salida de proceso medida y (k) se aplica al controlador ADEX (9) desde el sensor (5) como se muestra en el camino (6) . Esto permite que el Controlador ADEX (9) funcione en el modo automático para dominios adaptativos predictivos (AP) descrito en la patente estadounidense No. US 6, 662, 058 B1. En dicho modo automático, a partir de la variable de salida del proceso y (k) y su consigna SP (k) , el controlador ADEX (9) genera como salida del controlador una función integral de control en k , U (k) , que en este caso representa la integración de dicha señal de control del proceso u (k) entre dos instantes de control, k+1-5 y k. La salida U (k) del Controlador ADEX (9) se aplica al Bloque Diferencial (10) que calcula la señal de control u (k) que se aplica al proceso. El bloque integrador B (11) calcula una segunda función integral Uk+ (k-1) integrando dicha señal de control u (k) entre los instantes de control previos, k+1-5 y k-1. Dicha segunda función integral Uk-1 (k-1) se resta de dicha función integral de control en k, U (k) , dentro del bloque diferencial (10) para generar la señal de control u (k) que se aplica al aparato (4) que lleva a cabo el proceso que se está controlando. Las operaciones específicas que el Sistema ADEX de esta invención llevará a cabo en cada instante de control k para controlar automáticamente la variable de salida del proceso y (k) se describen a continuación: (a) Medición por el sensor (5) de la variable de salida del proceso realizado por el aparato (4) para obtener la variable de salida del proceso y (k) a controlar. (b) Cálculo de la función integral de control en k, U (k) , por el controlador ADEX (9) como salida del controlador. Este controlador calcula la función integral de control U (k) a partir del valor de la salida del proceso a controlar, y (k) , y el valor de su consigna en k, SP (K) , aplicado directamente desde el operador (2) al Controlador ADEX (9) , y ejecutando la secuencia de operaciones descrita en la patente de EE. UU. No. 6, 662, 058 B1 para controladores ADEX en dominios de operación adaptativos predictivos. (c) Cálculo de dicha segunda función integral Uk - i (k-1) por medio de la ecuación que determina la operación del bloque integrador B (11) dentro del bloque diferencial: donde Uk -i (k -1) se obtiene integrando las señales de control previas u (k) desde el instante k-1 al instante k+1-5, y 5 > 2 es un entero seleccionado convenientemente por el diseñador del sistema ADEX. (d) Cálculo de la señal de control u (k) en el bloque diferencial por medio de: u (k) = U (k) - Uk-1 (k-1) (2) (e) Aplicación de la señal de control u (k) al aparato que realiza el proceso. En su implementación, el Sistema ADEX de la presente invención puede aplicarse a una variable de salida de proceso escalar, y (k) , como se consideró anteriormente, o a un vector de salida de proceso, y (k) , compuesto de n componentes de salida escalares, que son n variables escalares de salida del proceso. En este caso, el sistema ADEX se puede aplicar a cada una de dichas n componentes escalares del vector de salida del proceso, como se describió anteriormente, pero teniendo en cuenta la naturaleza multivariable del proceso, dicho controlador ADEX puede ser un controlador multivariable ADEX que guía dicho vector de salida de proceso y (k) hacia su vector de consigna SP (k) . Dicho controlador ADEX multivariable calcula como su salida un vector función integral de ontrol en k, U (k) , que se aplicará a un bloque diferencial multivariable en el que un bloque integrador calculará un segundo vector función integral Uk-i (k-1) por medio de: Uk-i (k-1) = SfzTi1 u (k i) , 5 > 2 (3) donde u (k - i) es el vector de control que se ha aplicado en los instantes k - i al aparato que desarrolla el proceso y el vector de control u (k ) , que se aplica al aparato que desarrolla el proceso en el instante k, se calcula en dicho bloque diferencial por medio de: u (k) = U (k) - Uk-i (k-1) (4) EJEMPLO El rendimiento del sistema ADEX con función integral de la señal de control de la presente invención se ilustrará controlando un proceso simulado mono variable, con una entrada, u ( k ) , y una salida, y ( k ) , ambas en el instante k, que se miden como incrementos de sus valores cuando el proceso esta en estado de equilibrio, considerando que el proceso está en equilibrio cuando ambas variables de entrada y salida son iguales a cero. Cuando el período de control es igual a 1 segundo, la dinámica del proceso simulado puede describirse mediante la siguiente ecuación: y (k) = y (k) + 0.1 u (k 1) + o.1 u (k 2) + 0.2 u (k 3) + 0.2 u (k 4) (5) Para ilustrar el rendimiento del sistema ADEX de la invención, el proceso simulado se controlará en los diferentes escenarios que se describen a continuación: En un primer escenario, se utiliza para controlar el proceso simulado un controlador ADEX que opera en un dominio adaptativo predictivo, usando la secuencia de operaciones descrita en US6662058B1 y con un período de control de 1 segundo y un horizonte de predicción de 5 períodos de control. Los parámetros del bloque conductor del controlador ADEX, que genera la trayectoria deseada para la salida del proceso, son iguales a los de un modelo de segundo orden con una constante de tiempo igual a 1, 5 períodos de control, una ganancia y una relación de amortiguamiento igual a 1, y el modelo adaptativo predictivo (AP) , que relaciona la salida del proceso con la señal de control, es de primer orden con dos parámetros, de forma que calcula la estimación a priori de la salida del proceso en el instante k, y (kik 1) , mediante la ecuación: y (klk Como se describe en las patentes previamente citadas, el mecanismo de adaptación del controlador ADEX ajustará los parámetros de este modelo para hacer que dicha estimación a priori de la salida del proceso converja hacia la salida del proceso misma. Utilizando este mismo modelo AP, la predicción de la salida del proceso en el instante k + 1, y (k + 1ik) , a partir de la señal de control u (k) aplicada en el instante k viene dada por: y (k + 11k) = y (k) + b1 (k) u (k) + b2 (k) * u (k 1) (7) La señal de control u (k) generada por el controlador ADEX en el instante k hará la salida predicha del proceso en el instante k + 1, y (k + 1ik) , igual a la salida deseada generada en el instante k por el bloque conductor para ese mismo instante k + 1, yd (k + 1ik) . Por lo tanto, igualando dicha salida deseada a dicha salida predicha en la ecuación (7) y despejando, u (k) verificará la siguiente ecuación: u (k) = [yd (k + 11 k) y (k) b2 (k) * u (k 1) ] / bi (k) (8) En un segundo escenario, se utiliza para controlar el proceso simulado un controlador ADEX que opera en un dominio adaptativo predictivo, con la secuencia de operaciones de la patente US6662058B1, que tiene la misma configuración que el controlador ADEX del primer escenario, salvo que el período de control es igual a 2 segundos. Finalmente, en un tercer escenario, se utiliza para controlar el proceso simulado una realización del sistema ADEX con función integral de la señal de control, que se ha descrito previamente para ilustrar la invención, con un valor de 5, que determina el horizonte para el cálculo de la función integral de la señal de control, igual a 10, y un controlador ADEX que tiene la misma configuración que la del controlador ADEX considerado en el primer escenario, y un modelo adaptativo predictivo que, de acuerdo con la invención, relaciona dinámicamente la salida del proceso con dicha función integral de la señal de control U (k) , de forma que en este caso calcula la estimación a priori de la salida del proceso en el instante k, y (kik 1) , mediante la ecuación: y (klk 1) = y (k 1) + b1 (k 1) * U (k 1) + b2 (k 1) * U (k 2) (9) Utilizando este mismo modelo AP la salida del controlador ADEX en el instante k, U (k) , verificará la siguiente ecuación: U (k) = [yd (k + 1lk) y (k) b2 (k) *U (k 1) ] / bi (k) (10) Donde, análogamente a la ecuación (8) , yd (k + 1ik) es el valor de la trayectoria deseada para la salida del proceso en el instante de control k + 1. El modelo AP descrito por la ecuación (6) , que estima la salida del proceso y (k) y opera con un período de control de 1 segundo, tiene un orden reducido con respecto a la ecuación (5) , que representa la dinámica del proceso cuando el período de control también es de 1 segundo. Para este período de control de 1 segundo, el modelo AP de la ecuación (6) no tiene la estructura paramétrica adecuada para permitir que el mecanismo de adaptación del controlador ADEX pueda realizar la identificación de la dinámica del proceso descrito por la ecuación (5) , porque en la ecuación (6) solo hay 2 parámetros bi (k - 1) , y necesitaría tener otros 2 parámetros: S3 (k-1) y S4 (k-1) . Cuando el período de control es igual a 2 segundos, la dinámica del proceso simulado se puede describir mediante una ecuación del mismo orden que el modelo AP de la ecuación (6) , es decir, con el mismo número de parámetros. En este caso, el mecanismo de adaptación del controlador ADEX será capaz de identificar satisfactoriamente la dinámica del proceso utilizando el modelo AP descrito por la ecuación (6) . Por lo tanto, el período de control de 1 segundo está por debajo del umbral de modelado para un controlador ADEX que utiliza el modelo AP de la ecuación (6) y no se puede esperar un rendimiento de control satisfactorio. Sin embargo, si el período de control se incrementa a 2 segundos, el mismo controlador ADEX puede lograr una buena identificación de la dinámica del proceso y, como resultado, un rendimiento de control satisfactorio, es decir, el período de control de 2 segundos está por encima del umbral de modelado. Sin embargo, gracias a la invención es posible obtener un rendimiento de control satisfactorio a pesar de usar un período de control por debajo del umbral de modelado. Las curvas de evolución de la FIG. 2 presentan los resultados obtenidos en la aplicación del controlador ADEX, con un periodo de control de 1 segundo descrito en el primer escenario, al proceso simulado durante los primeros 6 minutos del experimento. Durante los segundos 6 minutos, se muestran los resultados los resultados obtenidos por el mismo controlador ADEX cuando el periodo de control es de 2 segundos. Las curvas de evolución en la parte superior de la figura representan la evolución de salida del proceso (línea gruesa) y su punto de consigna (línea fina) ; la escala se muestra en el eje izquierdo de las ordenadas. La curva de evolución en la parte inferior representa la señal de control generada por el controlador ADEX con periodos de control de 1 y 2 segundos y aplicada al proceso, su escala está representada en el eje derecho de ordenadas. La curva en la ase de la figura solo indica el instante en el que se produce el cambio en el período de control. Las curvas de evolución de la FIG. 3 presentan los resultados obtenidos en la aplicación del controlador ADEX, con un periodo de control de 1 segundo, al proceso simulado durante los primeros 6 minutos del experimento y, durante los segundos 6 minutos, los resultados obtenidos cuando la señal de control de dicho controlador se cambia por la señal de control al proceso generada por el sistema ADEX con función integral de control de la invención con un periodo de control también de 1 segundo. Las curvas de evolución y las escalas son equivalentes a las descritas para la FIG.2. Los resultados presentados en los primeros 6 minutos de la FIG. 2 muestran cómo la aplicación convencional, perteneciente al estado del arte previo, de un controlador ADEX que utiliza un período de control de 1 segundo, por debajo del umbral de modelado, no obtiene un rendimiento de control satisfactorio. Es decir, la salida del proceso bajo control oscila con una gran amplitud alrededor de su punto de consigna y la señal de control también oscila de manera similar, sin ninguna perspectiva para que el proceso se acerque a la estabilidad. Sin embargo, como se muestra por los resultados presentados en los segundos 6 minutos de la FIG. 2, cuando el mismo controlador ADEX empieza a utilizar un período de control de 2 segundos, sobre el umbral de modelado, la salida del proceso deja de oscilar y converge hacia el punto de consigna siguiendo una trayectoria de salida deseada. Además, los cambios posteriores en el punto de consigna hacen que la salida del proceso los alcance y se estabilice en ellos siguiendo asimismo una trayectoria de salida deseada, demostrando un rendimiento de control satisfactorio. Esta trayectoria deseada corresponde a la configuración del bloque conductor del controlador ADEX, que se ha descrito previamente. Los resultados presentados en los segundos 6 minutos de la FIG. 3 demuestran que un sistema ADEX con función integral de control puede obtener un rendimiento de control satisfactorio utilizando un período de control de 1 segundo, por debajo del umbral de modelado del controlador ADEX convencional utilizado en los primeros 6 minutos de esta misma figura. Desde el principio, la salida del proceso sigue una trayectoria deseada para alcanzar el punto de consigna y se estabiliza en él. Este rendimiento de control satisfactorio se reproduce en los cambios de consigna posteriores. También en este caso, esta trayectoria deseada corresponde a la configuración del bloque conductor del controlador ADEX, que se ha descrito previamente. Puede observarse que las trayectorias deseadas convergen hacia la consigna de forma mucho más rápida cuando la salida del proceso es controlada con un período de control e 1 segundo por el sistema ADEX con función integral de control (FIG. 3) , que cuando la salida del proceso es controlada por el controlador ADEX convencional con un período de control de 2 segundos (FIG. 2) . La razón es que el bloque conductor de un controlador ADEX genera la trayectoria deseada dependiendo del período de control, de forma que cuanto más corto es el período de control más rápidamente la trayectoria deseada de la salida del proceso bajo control se aproxima a su consigna. Como se ilustra en este ejemplo de simulación, el uso de sistemas ADEX con función integral de control permitirá obtener un rendimiento de control satisfactorio utilizando períodos de control por debajo de los umbrales de modelado de los controladores ADEX convencionales. El uso de estos períodos de control "cortos" es obligatorio para una amplia variedad de procesos industriales y, por lo tanto, el uso de sistemas ADEX con función integral de control representa un avance significativo en el rendimiento de control para este tipo de procesos industriales.
Publicaciones:
ES2848475 (09/08/2021) - A1 Solicitud de patente con informe sobre el estado de la técnica
ES2848475 (25/01/2022) - B2 Patente de invención con examen
Eventos:
En fecha 06/02/2020 se realizó Registro Instancia de Solicitud
En fecha 07/02/2020 se realizó Admisión a Trámite
En fecha 07/02/2020 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 10/02/2020 se realizó Concesión solicitud de reducción de tasas
En fecha 11/02/2020 se realizó Superado examen de oficio
En fecha 14/02/2020 se realizó Publicación concesión reducción de tasas
En fecha 18/02/2020 se realizó 3406X_Solicitud Correcciones
En fecha 20/02/2020 se realizó 1551X_Notificación Correcciones Admitidas
En fecha 11/09/2020 se realizó Realizado IET
En fecha 14/09/2020 se realizó 1109P_Comunicación Traslado del IET
En fecha 22/12/2020 se realizó PETEX_Petición de examen sustantivo
En fecha 23/02/2021 se realizó 5215P_Observaciones del solicitante al IET, Opinión Escrita y/o alegaciones a observaciones de terceros
En fecha 09/08/2021 se realizó Publicación Solicitud
En fecha 09/08/2021 se realizó Publicación Folleto Solicitud con IET (A1)
En fecha 24/11/2021 se realizó Validación petición y/o pago de examen sustantivo conforme
En fecha 07/12/2021 se realizó Designación de Comisión de Expertos
En fecha 10/01/2022 se realizó Finalización de Examen Sustantivo
En fecha 10/01/2022 se realizó 6121P_Comunicación finalización de examen sustantivo
En fecha 14/01/2022 se realizó Publicación finalización de examen sustantivo
En fecha 18/01/2022 se realizó Concesión con examen sustantivo
En fecha 18/01/2022 se realizó Entrega título
En fecha 18/01/2022 se realizó 6125P_Notificación de concesión con examen sustantivo
En fecha 25/01/2022 se realizó Publicación concesión Patente
En fecha 25/01/2022 se realizó Publicación Folleto Concesión
En fecha 26/07/2022 se realizó Plazo expirado presentación de oposiciones contra la concesión de la Patente
Pagos:
06/02/2020 - Pago Tasas IET
03/03/2022 - Pago 03 Anualidad
02/03/2023 - Pago 04 Anualidad
+ ES-2848475_A11. Procedimiento para generar un vector de control u (k) durante cada uno de una pluralidad de instantes de control k, dicho vector de control se aplica a un aparato que realiza un proceso con al menos una variable de entrada y al menos una variable de salida, al menos una de dichas variables de entrada define un vector de entrada de proceso y al menos una de dichas variables de salida define un vector de salida de proceso y (k) , dicho aparato varía dicho vector de entrada de proceso de acuerdo con el valor de dicho vector de control, dicho método guía dicho vector de salida del proceso hacia un vector de consigna SP (k) , dicho método caracterizado por comprender los siguientes pasos: (A) generar un vector función integral U (k) del vector de control que se aplica al proceso u (k) ejecutando la secuencia de operaciones de un controlador ADEX en uno de sus dominios adaptativos predictivos, cuyo modelo adaptativo predictivo relaciona el vector de salida del proceso y (k) con dicho vector función integral del vector de control, con el fin de conducir el vector de salida del proceso hacia su consigna SP (k) ; (B) calcular un segundo vector función integral Uk-i (k-1) del vector de control a aplicar al proceso hasta el instante k - 1; (C) calcular el vector de control a aplicar al proceso u (k) utilizando un operador diferencial que deriva dicho vector de control a partir de los vectores funciones integrales generados en los pasos previos (A) y (B) ; (D) aplicar dicho vector de control al aparato que realiza el proceso. 2. Procedimiento según la reivindicación 1, caracterizado por realizar los pasos (A) y (B) de la siguiente forma: (A) Generar un vector función integral de control U (k) , que representa una función integral de los valores de dicho vector de control u (k) entre dos instantes de control k+1-5 y k, siendo 5 > 2, utilizando un controlador ADEX que opera en un dominio adaptativo predictivo y cuyo modelo adaptativo predictivo relaciona dinámicamente el vector de salida del proceso y (k) con dicho vector función integral de control, de forma que la salida de dicho controlador ADEX s dicho vector U (k) y se calcula para guiar dicho vector de salida del proceso hacia su vector de consigna SP (k) ; (B) Generar un segundo vector función integral Uk-i (k -1) , mediante una función integral de los valores de dicho vector de control u (k) entre los dos instantes de control previos k+1-5 y k-1. 3. Un sistema ADEX que comprende un computador controlador para aplicar el procedimiento para generar un vector de control u (k) de cualquiera de las reivindicaciones 1 y 2, durante cada uno de una pluralidad de instantes de control k, dicho vector de control se aplica a un aparato que lleva a cabo un proceso con al menos una variable de entrada y al menos una variable de salida, al menos una de dichas variables de entrada definen un vector de entrada de proceso y al menos una de dichas variables de salida definen un vector de salida de proceso y (k) , dicho aparato varía dicho vector de entrada de proceso de acuerdo con el valor de dicho vector de control u (k) , dicho sistema guía dicho vector de salida y (k) hacia un vector de consigna SP (k) , dicho computador controlador está configurado por conjuntos de instrucciones para operar como: a. Un controlador ADEX que opera en un dominio adaptativo predictivo y cuyo modelo adaptativo predictivo relaciona dinámicamente el vector de salida del proceso y (k) con un vector función integral U (k) del vector de control que se aplica al proceso, de forma que la salida de dicho controlador ADEX es dicho vector U (k) y se calcula para guiar dicho vector de salida del proceso hacia su vector de consigna SP (k) ; b. Un bloque integrador que actúa generando un segundo vector función integral Uk-i (k-1) del vector de control a aplicar al proceso hasta el instante k - 1. c. Un bloque diferencial que deriva dicho vector de control u (k) a partir de los vectores funciones integrales generados por dicho controlador ADEX y dicho bloque integrador. en el que dicho vector de control u (k) se aplica a dicho aparato de forma que dicho aparato varíe dicho vector de entrada del proceso de acuerdo con dicho vector de control. 4. Un sistema ADEX según la reivindicación 3, caracterizado por configurar los conjuntos de instrucciones a y b de la siguiente forma: a. Un controlador ADEX que opera en un dominio adaptativo predictivo y cuyo modelo adaptativo predictivo relaciona dinámicamente el vector de salida del proceso y (k) con un vector función integral de control U (k) , que representa una función integral de los valores de dicho vector de control u (k) entre dos instantes de control k+1-5 y k, siendo 5 > 2, de forma que la salida de dicho controlador ADEX es dicho vector U (k) y se calcula para guiar dicho vector de salida del proceso hacia su vector de consigna SP (k) ; b. Un bloque integrador que actúa generando un segundo vector función integral Uk-i (k-1) , que es una función integral de los valores de dicho control vector u (k) entre los dos instantes de control k +1-5 y k-1.
+ ES-2848475_B21. Procedimiento para generar un vector de control u (k) durante cada uno de una pluralidad de instantes de control k, dicho vector de control se aplica a un aparato que realiza un proceso con al menos una variable de entrada y al menos una variable de salida, al menos una de dichas variables de entrada define un vector de entrada de proceso y al menos una de dichas variables de salida define un vector de salida de proceso y (k) , dicho aparato varía dicho vector de entrada de proceso de acuerdo con el valor de dicho vector de control, dicho método guía dicho vector de salida del proceso hacia un vector de consigna SP (k) , dicho método caracterizado por comprender los siguientes pasos: (A) generar un vector función integral U (k) del vector de control que se aplica al proceso u (k) ejecutando la secuencia de operaciones de un controlador ADEX en uno de sus dominios adaptativos predictivos, cuyo modelo adaptativo predictivo relaciona el vector de salida del proceso y (k) con dicho vector función integral del vector de control, con el fin de conducir el vector de salida del proceso hacia su consigna SP (k) ; (B) calcular un segundo vector función integral Uk-i (k-1) del vector de control a aplicar al proceso hasta el instante k - 1; (C) calcular el vector de control a aplicar al proceso u (k) utilizando un operador diferencial que deriva dicho vector de control a partir de los vectores funciones integrales generados en los pasos previos (A) y (B) ; (D) aplicar dicho vector de control al aparato que realiza el proceso. 2. Procedimiento según la reivindicación 1, caracterizado por realizar los pasos (A) y (B) de la siguiente forma: (A) Generar un vector función integral de control U (k) , que representa una función integral de los valores de dicho vector de control u (k) entre dos instantes de control k+1-5 y k, siendo 5 > 2, utilizando un controlador ADEX que opera en un dominio adaptativo predictivo y cuyo modelo adaptativo predictivo relaciona dinámicamente el vector de salida del proceso y (k) con dicho vector función integral de control, de forma que la salida de dicho controlador ADEX s dicho vector U (k) y se calcula para guiar dicho vector de salida del proceso hacia su vector de consigna SP (k) ; (B) Generar un segundo vector función integral Uk-i (k -1) , mediante una función integral de los valores de dicho vector de control u (k) entre los dos instantes de control previos k+1-5 y k-1. 3. Un sistema ADEX que comprende un computador controlador para aplicar el procedimiento para generar un vector de control u (k) de cualquiera de las reivindicaciones 1 y 2, durante cada uno de una pluralidad de instantes de control k, dicho vector de control se aplica a un aparato que lleva a cabo un proceso con al menos una variable de entrada y al menos una variable de salida, al menos una de dichas variables de entrada definen un vector de entrada de proceso y al menos una de dichas variables de salida definen un vector de salida de proceso y (k) , dicho aparato varía dicho vector de entrada de proceso de acuerdo con el valor de dicho vector de control u (k) , dicho sistema guía dicho vector de salida y (k) hacia un vector de consigna SP (k) , dicho computador controlador está configurado por conjuntos de instrucciones para operar como: a. Un controlador ADEX que opera en un dominio adaptativo predictivo y cuyo modelo adaptativo predictivo relaciona dinámicamente el vector de salida del proceso y (k) con un vector función integral U (k) del vector de control que se aplica al proceso, de forma que la salida de dicho controlador ADEX es dicho vector U (k) y se calcula para guiar dicho vector de salida del proceso hacia su vector de consigna SP (k) ; b. Un bloque integrador que actúa generando un segundo vector función integral Uk-i (k-1) del vector de control a aplicar al proceso hasta el instante k - 1. c. Un bloque diferencial que deriva dicho vector de control u (k) a partir de los vectores funciones integrales generados por dicho controlador ADEX y dicho bloque integrador. en el que dicho vector de control u (k) se aplica a dicho aparato de forma que dicho aparato varíe dicho vector de entrada del proceso de acuerdo con dicho vector de control. 4. Un sistema ADEX según la reivindicación 3, caracterizado por configurar los conjuntos de instrucciones a y b de la siguiente forma: a. Un controlador ADEX que opera en un dominio adaptativo predictivo y cuyo modelo adaptativo predictivo relaciona dinámicamente el vector de salida del proceso y (k) con un vector función integral de control U (k) , que representa una función integral de los valores de dicho vector de control u (k) entre dos instantes de control k+1-5 y k, siendo 5 > 2, de forma que la salida de dicho controlador ADEX es dicho vector U (k) y se calcula para guiar dicho vector de salida del proceso hacia su vector de consigna SP (k) ; b. Un bloque integrador que actúa generando un segundo vector función integral Uk-i (k-1) , que es una función integral de los valores de dicho control vector u (k) entre los dos instantes de control k +1-5 y k-1.
Los productos y servicios protegidos por este registro son:
G05B 13/04 - G05B 21/00 - G05D 11/00
Descripciones:
+ ES-2848475_A1 Procedimiento para generar un vector de control y sistema ADEX que lo aplica La invención se refiere a un sistema de control adaptativo predictivo experto, denominado sistema ADEX, que utiliza una función integral de la señal de control aplicada al proceso para controlar variables de salida de procesos monovariables o multivariables, donde los parámetros del proceso son conocidos o desconocidos y constantes o variables en el tiempo. El sistema ADEX de la presente invención implementa una estrategia de control en la cual un controlador adaptativo predictivo experto, denominado controlador ADEX, utiliza en sus dominios adaptativos predictivos un modelo adaptativo predictivo que relaciona dinámicamente la salida del proceso a controlar con una función integral de la señal de control que se aplica al proceso, en lugar de relacionar dinámicamente dicha salida del proceso con la señal que se aplica al proceso como hacen los controladores ADEX convencionales del estado del arte previo. De esta manera, la salida de dicho controlador ADEX es una función integral de la señal de control. A partir de esta función integral dicha estrategia de control utiliza un operador diferencial para calcular la acción de control real que se aplica al proceso. ESTADO DE LA TÉCNICA La invención se enmarca en el área de los sistemas de control digital que utilizan un computador que contiene un programa que se ejecuta periódicamente en una pluralidad de instantes de control k, para producir una señal de control que en cada uno de dichos instantes k se aplica al aparato que realiza el proceso para controlar la evolución de variables de salida del mismo. La invención, como procedimiento, define la secuencia de operaciones que determina dicho programa y, como sistema, define los conjuntos de instrucciones que se ejecutan de forma coherente con el soporte de dicho computador para calcular y aplicar la señal de control en cuestión al aparato que realiza el proceso. El libro "ADEX Optimized Adaptive Systems and Controllers: From Research to Industrial Practice", publicado por la editorial Springer en 2015, describe la metodología, la teoría de estabilidad y diversas aplicaciones de los controladores Adaptativos Predictivos Expertos, que fueron introducidos, definidos y descritos en detalle en la patente en EE. UU. No. 6.662.058 B1. Estos controladores representan una extensión metodológica de os controladores adaptativos predictivos definidos previamente en las patentes en EE.UU. Nos. 4, 197, 576 y 4, 358, 822. Dicho libro denomina a estos controladores como controladores ADEX y este documento utilizará por simplicidad la misma nomenclatura de controlador ADEX para los controladores descritos en las previamente mencionadas patentes en EE. UU. Como se describe en la patente de EE.UU. No. 6.662.058 B1, un controlador ADEX en sus dominios de operación denominados Adaptativos Predictivos, ajusta en cada instante de control los parámetros de un modelo adaptativo predictivo (AP) que identifica una relación dinámica entre las variables del proceso y una señal de control a aplicar al proceso; y utiliza dicho modelo AP para calcular la señal de control que debe aplicarse al proceso para que la predicción de la variable de salida del proceso a controlar sea igual a un valor deseado para dicha variable de salida del proceso. Los controladores ADEX pueden asimismo incluir dominios de operación denominados expertos, en los cuales la señal de control se genera mediante reglas que imitan la actuación del control manual realizado por un operador humano. Los controladores adaptativos predictivos descritos en las patentes en EE.UU. Nos. 4, 197, 576 y 4, 358, 822 pueden definirse como controladores ADEX que operan únicamente en un solo dominio adaptativo predictivo. En consecuencia, la referencia a controladores ADEX que se realiza en lo que sigue de este documento incluye también el conjunto de controladores adaptativos predictivos definidos en dichas patentes americanas, dado que la presente invención concierne únicamente a la aplicación de controladores ADEX en sus dominios adaptativos predictivos. Asimismo, dicho libro distingue claramente entre controladores ADEX y sistemas ADEX de la siguiente manera: mientras que un controlador ADEX se ha definido en la patente de EE. UU. No. 6.662.058 B1 y se utiliza para controlar variables de salida de un proceso, un sistema ADEX se define mediante una estrategia de control para un proceso en la que se utilizan controladores ADEX para lograr un mejor rendimiento global en la operación del proceso. En este caso, un sistema ADEX será innovador si la estrategia de control que lo define es innovadora. La invención está relacionada con un sistema ADEX para controlar variables de salida de procesos monovariables o multivariables mediante el uso de una estrategia de control que genera una función integral de la señal de control que se aplica al proceso en los distintos instantes de control y utiliza esta función integral de tal manera que el rendimiento de control obtenido para dichas variables de salida mejora significativamente, en un rango de períodos de control pequeños con respecto a la dinámica del proceso, el endimiento que se obtendría por la aplicación directa de un controlador ADEX convencional, perteneciente al estado del arte previamente patentado, en el mismo contexto de aplicación. Generalmente se denomina periodo de control al tiempo transcurrido entre dos instantes de control consecutivos en la operación de un controlador o de un sistema de control. En la aplicación de los controladores ADEX, el período de control se elige generalmente teniendo en cuenta la dinámica del proceso. Así pues, si el proceso tiene una dinámica lenta, el periodo de control se elegirá para este tipo de proceso más largo que el que se elegiría para un proceso con una dinámica más rápida. En general, el período de control se elige igual a un porcentaje del denominado tiempo de la respuesta natural del proceso, es decir, del tiempo que tarda el proceso en pasar de un estado de equilibrio a otro en respuesta a una entrada al proceso en escalón. Una elección razonable del periodo de control podría generalmente estar en un rango entre un décimo y un veinteavo del tiempo de respuesta natural del proceso. Con frecuencia, el período de control se determina por consideraciones prácticas, como puede ser la frecuencia de las perturbaciones que actúan sobre el proceso y cuyo efecto tiene que ser compensado por la señal de control. Esta clase de sistema ADEX es útil en una gran variedad de áreas donde el control de procesos es importante para el rendimiento económico de las plantas, tales como el área del cemento o la de la energía y, en general, en la industria. Ejemplos de procesos en los que este sistema ADEX se puede aplicar ventajosamente son los molinos de cemento, donde la finura del producto molido se controla mediante la entrada de caudal de Clinker, o las centrales eléctricas de carbón, donde la potencia generada se controla mediante la entrada de caudal de carbón. A menudo es difícil identificar una relación dinámica entre las variables de salida a controlar en este tipo de procesos y las entradas al proceso o señales de control, lo que explica el bajo rendimiento de control que generalmente obtienen en este contexto técnicas de control como la de los Controladores Avanzados Basados en Modelos, donde el modelo representa el resultado de tal identificación. Es sabido que los Controladores Avanzados Basados en Modelo utilizan una relación de entrada/salida (E/S) del proceso o modelo del proceso para predecir la evolución de las variables de salida del proceso. La fiabilidad de dicha predicción depende del valor de los parámetros del modelo del proceso, denominado modelo predictivo. Algunas soluciones requieren predeterminar el valor de dichos parámetros del modelo antes de que el controlador en cuestión inicie su operación de control automático; este es el caso de los llamados Controladores Predictivos Basados en Modelo. Otras soluciones de control, denominado adaptativo, actualizan un modelo del proceso en tiempo real por medio de un mecanismo de adaptación, de tal manera que los cambios que pueden ocurrir en la dinámica del proceso pueden incorporarse rápidamente en el modelo del proceso; al mismo tiempo dicho modelo del proceso, denominado en este caso modelo adaptativo predictivo, se utiliza para predecir la evolución de las variables de salida del proceso y para controlar el proceso. Este es el caso de los previamente mencionados controladores ADEX en sus dominios de operación adaptativos predictivos. Es sabido también que el valor de los parámetros de un modelo capaz de representar la dinámica de un proceso depende del período de control elegido. En consecuencia, tanto para los controladores predictivos basados en modelo como para los controladores ADEX, la elección del período de control determinará el rango de magnitud del valor de los parámetros del modelo predictivo o adaptativo predictivo. Se sabe que la elección del período de control por debajo de un cierto umbral de tiempo, denominado "umbral de modelado", que es relativamente pequeño con respecto al previamente mencionado tiempo de respuesta natural del proceso bajo control, hace que el valor de un conjunto de parámetros del modelo predictivo o adaptativo predictivo se aproxime en valor absoluto excesivamente a cero. Esto hace que estos parámetros aumenten su sensibilidad a cualquier pequeño error de identificación en su valor y, por lo tanto, el uso del valor de estos parámetros en la predicción de la evolución de la variable de salida del proceso bajo control y en el cálculo de la señal de control que se aplicará al proceso, puede deteriorar significativamente el rendimiento del controlador. Un escenario de control con períodos de control mayores que dicho umbral de modelado evitaría que dicho conjunto de parámetros del modelo predictivo o adaptativo predictivo se aproximara indeseablemente al valor cero y reduciría su sensibilidad a pequeños errores de identificación. Sin embargo, en la práctica, la elección de estos períodos de control más grandes puede no ser posible, ya que limitarían la precisión y la capacidad de reacción del sistema de control a perturbaciones que la señal de control no podría contrarrestar hasta el final del período de control. Por ejemplo, el período de control que generalmente se aplica para establecer los cambios en la alimentación de clínker de un molino de cemento generalmente es cercano a 30 segundos, y el período de control que generalmente se aplica para establecer los cambios en el caudal de carbón de una central eléctrica es de aproximadamente 1 minuto. En ambos casos, el período de control está por debajo del umbral de modelado. Por lo tanto, el rendimiento de control de dichos controladores avanzados basados en modelos, adaptativos o no adaptativos, es eneralmente subóptimo con un margen significativo de mejora bajo el período de control requerido por la práctica. También puede ocurrir que, cuando el período de control está por debajo de un cierto umbral de modelado, el modelo utilizado por el controlador avanzado sea de "orden reducido", es decir, que el número de parámetros de dicho modelo no sea suficiente para identificar satisfactoriamente la dinámica completa del proceso, lo que resultará en un rendimiento deficiente en la aplicación del controlador. En este caso, el aumentar el período de control sobre dicho umbral de modelado puede hacer que el número de parámetros del modelo utilizado en el controlador sea suficiente para lograr una identificación satisfactoria de la dinámica del proceso y, como resultado, un mejor rendimiento del control. Sin embargo, como se ha explicado anteriormente, la elección de un período de control por debajo del umbral de modelado puede ser obligatoria y puede deteriorar significativamente el rendimiento de control. BREVE DESCRIPCIÓN DE LA INVENCIÓN El sistema ADEX de la presente invención utiliza un computador digital para aplicar una estrategia de control de procesos en la cual se utiliza un controlador Adaptativo Predictivo Experto (ADEX) . Este controlador ADEX usa en sus dominios adaptativos predictivos un modelo adaptativo predictivo que relaciona dinámicamente la salida del proceso bajo control con una función integral de la señal de control que se aplica al proceso. De esta manera, la salida de dicho controlador ADEX no es la señal de control a aplicar al proceso como en el estado del arte previo, sino una función integral de la señal de control que debe aplicarse al proceso. A partir de esta función integral dicha estrategia de control utiliza un operador diferencial para calcular la acción de control real que se aplica al proceso. Así pues, el procedimiento de control de la invención, para el cálculo de la señal de control en cada instante k, está caracterizado por comprender las etapas de: 1) Generar una función integral de la señal de control que se aplica al proceso ejecutando la secuencia de operaciones de un controlador ADEX en uno de sus dominios adaptativos predictivos, cuyo modelo adaptativo predictivo relaciona la salida del proceso con dicha función integral de la señal de control, con el fin de conducir la salida del proceso hacia su consigna. 2) Calcular una segunda función integral de la señal de control a aplicar al proceso hasta el instante k - 1. 3) Calcular la señal de control a aplicar al proceso utilizando un operador diferencial que deriva dicha señal de control a partir de las funciones integrales previamente consideradas. 4) Aplicar dicha señal de control al aparato que realiza el proceso para controlar la evolución de sus variables de salida. Por su parte, el sistema ADEX que aplica este procedimiento comprende un computador controlador para generar la señal de control que se aplica en cada instante k al aparato que realiza el proceso, que está configurado por conjuntos de instrucciones y medios para operar como: a. Un controlador ADEX que opera en un dominio adaptativo predictivo y cuyo modelo adaptativo predictivo relaciona dinámicamente la salida del proceso a controlar con una función integral de la señal de control a aplicar al proceso, de forma que la salida de dicho controlador ADEX es dicha función integral de la señal de control y se calcula para guiar dicha salida del proceso hacia su punto de consigna; b. Un bloque integrador que genera una segunda función integral de la señal de control a aplicar al proceso hasta el instante k - 1; c. Un bloque diferencial que calcula dicha señal de control a aplicar al proceso a partir de las dos funciones integrales previamente consideradas; d. Medios que aplican dicha señal de control al aparato que realiza el proceso para controlar la evolución de las variables de salida del mismo. BREVE DESCRIPCIÓN DE LOS DIBUJOS Para una mejor comprensión de la invención, se incluyen las siguientes figuras, que representan un ejemplo de realización y que no deben ser consideradas más que como una forma de ilustrar y aclarar la invención. La FIG. 1 muestra la estructura general y conceptual de un sistema ADEX con función integral de control según una realización. La FIG. 2 muestra un gráfico de curvas de tendencia durante dos períodos consecutivos de tiempo. Durante un período inicial de 6 minutos, las curvas de tendencia representan el resultado de una aplicación directa de un controlador ADEX con un período de control por debajo del umbral de modelado a un proceso simulado. Durante un segundo período e 6 minutos, las curvas de tendencia continúan representando el resultado de la aplicación directa del mismo controlador ADEX a dicho proceso simulado, pero en este segundo período el período de control de este controlador ADEX se ha cambiado a un valor sobre el umbral de modelado. Las curvas de tendencia en la parte superior de la figura representan la evolución de salida del proceso (línea gruesa) y su punto de consigna (línea fina) , la escala para ambas curvas está en el eje de ordenadas del lado izquierdo. La curva de tendencia en el medio representa la señal de control generada por el controlador ADEX y aplicada al proceso, la escala está en el eje de ordenadas del lado derecho. La curva de tendencia en la parte inferior es solo para indicar cuándo se ha cambiado el período de control. La FIG. 3 también muestra un gráfico de curvas de tendencia durante dos períodos de tiempo consecutivos. Los resultados presentados en el período inicial de 6 minutos son equivalentes a los presentados en el período inicial de la FIG. 2, es decir, el resultado de una aplicación directa del mismo controlador ADEX de la FIG.2 con un período de control por debajo del umbral de modelado al mismo proceso simulado. Durante el segundo período de 6 minutos, la señal de control aplicada al proceso se cambia a la generada por un sistema ADEX con función integral de control de la presente invención y el período de control se mantiene igual al utilizado durante el período inicial. Las curvas de tendencia tienen un significado equivalente a las de la FIG. 2. MODOS DE REALIZACIÓN DE LA INVENCIÓN A continuación, se describe de manera breve una forma de realización de la invención, como ejemplo ilustrativo y no limitativo de ésta. En cualquier instante de control k, el operador humano puede optar por aplicar control manual o control automático a la variable de proceso que se desea controlar; ambas formas de control se muestran en la FIG. 1 y se describen con referencia a dicha figura a continuación: 1. Control manual: bajo control manual, la señal de control u ( k ) se aplica directamente desde el operador (2) al aparato (4) que lleva a cabo el proceso que se está controlando y al bloque integrador A (7) como se muestra en el camino (1) . Un sensor (5) asociado al aparato (4) mide la variable de salida del proceso y (k) a controlar. Esta variable y (k) se aplica como variable de salida del proceso a controlar, como se muestra en el camino (6) , al controlador ADEX (9) . El bloque integrador A (7) calcula una función integral de control en k-1, U (k-1) , integrando icha señal de control u (k) entre dos instantes de control previos, k-5 y k-1, donde 5 es un número entero que representa el intervalo de integración en períodos de control, siendo 5 > 2. Dicha función integral de control en k-1, U (k-1) , se aplica como salida del controlador en k-1 al Controlador ADEX (9) . Por lo tanto, bajo control manual, el Controlador ADEX (9) recibe como entradas: 1) dicha variable de salida del proceso y (k) , y 2) dicha función integral de control en k-1, U (k-1) . Esto permite que el Controlador ADEX (9) funcione en el modo de identificación para dominios adaptativos predictivos (AP) descrito en la patente estadounidense No. US 6, 662, 058 B1. Dicho modo de identificación ajustará los parámetros del modelo adaptativo predictivo (AP) para el dominio operativo correspondiente del controlador ADEX (9) , de tal manera que dicho modelo AP representará una relación dinámica entre dicha variable de salida del proceso y (k) y dicha función integral de control U (k-1) y, por lo tanto, será capaz de predecir valores futuros de dicha variable de salida de proceso y (k) en función de una secuencia futura de valores de dicha función integral de control U (k-1) . Control automático: bajo control automático, el valor de la consigna SP (k) para la variable de salida del proceso y (k) se aplica directamente desde el operador (2) al Controlador ADEX (9) , como se muestra en el camino (8) . Asimismo, la variable de salida de proceso medida y (k) se aplica al controlador ADEX (9) desde el sensor (5) como se muestra en el camino (6) . Esto permite que el Controlador ADEX (9) funcione en el modo automático para dominios adaptativos predictivos (AP) descrito en la patente estadounidense No. US 6, 662, 058 B1. En dicho modo automático, a partir de la variable de salida del proceso y (k) y su consigna SP (k) , el controlador ADEX (9) genera como salida del controlador una función integral de control en k , U (k) , que en este caso representa la integración de dicha señal de control del proceso u (k) entre dos instantes de control, k+1-5 y k. La salida U (k) del Controlador ADEX (9) se aplica al Bloque Diferencial (10) que calcula la señal de control u (k) que se aplica al proceso. El bloque integrador B (11) calcula una segunda función integral Uk+ (k-1) integrando dicha señal de control u (k) entre los instantes de control previos, k+1-5 y k-1. Dicha segunda función integral Uk-1 (k-1) se resta de dicha función integral de control en k, U (k) , dentro del bloque diferencial (10) para generar la señal de control u (k) que se aplica al aparato (4) que lleva a cabo el proceso que se está controlando. Las operaciones específicas que el Sistema ADEX de esta invención llevará a cabo en cada instante de control k para controlar automáticamente la variable de salida del proceso y (k) se describen a continuación: (a) Medición por el sensor (5) de la variable de salida del proceso realizado por el aparato (4) para obtener la variable de salida del proceso y (k) a controlar. (b) Cálculo de la función integral de control en k, U (k) , por el controlador ADEX (9) como salida del controlador. Este controlador calcula la función integral de control U (k) a partir del valor de la salida del proceso a controlar, y (k) , y el valor de su consigna en k, SP (K) , aplicado directamente desde el operador (2) al Controlador ADEX (9) , y ejecutando la secuencia de operaciones descrita en la patente de EE. UU. No. 6, 662, 058 B1 para controladores ADEX en dominios de operación adaptativos predictivos. (c) Cálculo de dicha segunda función integral Uk-i (k-1) por medio de la ecuación que determina la operación del bloque integrador B (11) dentro del bloque diferencial: donde Uk-i (k -1) se obtiene integrando las señales de control previas u (k) desde el instante k-1 al instante k+1-5, y 5 > 2 es un entero seleccionado convenientemente por el diseñador del sistema ADEX. (d) Cálculo de la señal de control u (k) en el bloque diferencial por medio de: u (k) = U (k) - Uk-1 (k-1) (2) (e) Aplicación de la señal de control u (k) al aparato que realiza el proceso. En su implementación, el Sistema ADEX de la presente invención puede aplicarse a una variable de salida de proceso escalar, y (k) , como se consideró anteriormente, o a un vector de salida de proceso, y (k) , compuesto de n componentes de salida escalares, que son n variables escalares de salida del proceso. En este caso, el sistema ADEX se puede aplicar a cada una de dichas n componentes escalares del vector de salida del proceso, como se describió anteriormente, pero teniendo en cuenta la naturaleza multivariable del proceso, dicho controlador ADEX puede ser un controlador multivariable ADEX que guía dicho vector de salida de proceso y (k) hacia su vector de consigna SP (k) . Dicho controlador ADEX multivariable calcula como su salida un vector función integral de ontrol en k, U (k) , que se aplicará a un bloque diferencial multivariable en el que un bloque integrador calculará un segundo vector función integral Uk-i (k-1) por medio de: Uk.i (k-1) = ZfzTi1 u (k i) , 5 > 2 (3) donde u (k - i) es el vector de control que se ha aplicado en los instantes k - i al aparato que desarrolla el proceso y el vector de control u (k ) , que se aplica al aparato que desarrolla el proceso en el instante k, se calcula en dicho bloque diferencial por medio de: u (k) = U (k) - Uk-i (k-1) (4) EJEMPLO El rendimiento del sistema ADEX con función integral de la señal de control de la presente invención se ilustrará controlando un proceso simulado mono variable, con una entrada, u ( k ) , y una salida, y ( k ) , ambas en el instante k, que se miden como incrementos de sus valores cuando el proceso esta en estado de equilibrio, considerando que el proceso está en equilibrio cuando ambas variables de entrada y salida son iguales a cero. Cuando el período de control es igual a 1 segundo, la dinámica del proceso simulado puede describirse mediante la siguiente ecuación: y (k) = y (k) + 0.1 u (k 1) + o.1 u (k 2) + 0.2 u (k 3) + 0.2 u (k 4) (5) Para ilustrar el rendimiento del sistema ADEX de la invención, el proceso simulado se controlará en los diferentes escenarios que se describen a continuación: En un primer escenario, se utiliza para controlar el proceso simulado un controlador ADEX que opera en un dominio adaptativo predictivo, usando la secuencia de operaciones descrita en US6662058B1 y con un período de control de 1 segundo y un horizonte de predicción de 5 períodos de control. Los parámetros del bloque conductor del controlador ADEX, que genera la trayectoria deseada para la salida del proceso, son iguales a los de un modelo de segundo orden con una constante de tiempo igual a 1, 5 períodos de control, una ganancia y una relación de amortiguamiento igual a 1, y el modelo adaptativo predictivo (AP) , que relaciona la salida del proceso con la señal de control, es de primer orden con dos parámetros, de forma que calcula la estimación a priori de la salida del proceso en el instante k, y (kik 1) , mediante la ecuación: y (klk Como se describe en las patentes previamente citadas, el mecanismo de adaptación del controlador ADEX ajustará los parámetros de este modelo para hacer que dicha estimación a priori de la salida del proceso converja hacia la salida del proceso misma. Utilizando este mismo modelo AP, la predicción de la salida del proceso en el instante k + 1, y (k + 1ik) , a partir de la señal de control u (k) aplicada en el instante k viene dada por: La señal de control u (k) generada por el controlador ADEX en el instante k hará la salida predicha del proceso en el instante k + 1, y (k + 1ik) , igual a la salida deseada generada en el instante k por el bloque conductor para ese mismo instante k + 1, yd (k + 1ik) . Por lo tanto, igualando dicha salida deseada a dicha salida predicha en la ecuación (7) y despejando, u (k) verificará la siguiente ecuación: En un segundo escenario, se utiliza para controlar el proceso simulado un controlador ADEX que opera en un dominio adaptativo predictivo, con la secuencia de operaciones de la patente US6662058B1, que tiene la misma configuración que el controlador ADEX del primer escenario, salvo que el período de control es igual a 2 segundos. Finalmente, en un tercer escenario, se utiliza para controlar el proceso simulado una realización del sistema ADEX con función integral de la señal de control, que se ha descrito previamente para ilustrar la invención, con un valor de 5, que determina el horizonte para el cálculo de la función integral de la señal de control, igual a 10, y un controlador ADEX que tiene la misma configuración que la del controlador ADEX considerado en el primer escenario, y un modelo adaptativo predictivo que, de acuerdo con la invención, relaciona dinámicamente la salida del proceso con dicha función integral de la señal de control U (k) , de forma que en este caso calcula la estimación a priori de la salida del proceso en el instante k, y (kik 1) , mediante la ecuación: Utilizando este mismo modelo AP la salida del controlador ADEX en el instante k, U (k) , verificará la siguiente ecuación: Donde, análogamente a la ecuación (8) , yd (k + 1ik) es el valor de la trayectoria deseada para la salida del proceso en el instante de control k + 1. El modelo AP descrito por la ecuación (6) , que estima la salida del proceso y (k) y opera con un período de control de 1 segundo, tiene un orden reducido con respecto a la ecuación (5) , que representa la dinámica del proceso cuando el período de control también es de 1 segundo. Para este período de control de 1 segundo, el modelo AP de la ecuación (6) no tiene la estructura paramétrica adecuada para permitir que el mecanismo de adaptación del controlador ADEX pueda realizar la identificación de la dinámica del proceso descrito por la ecuación (5) , porque en la ecuación (6) solo hay 2 parámetros bi (k - 1) , y necesitaría tener otros 2 parámetros: S3 (k-1) y S4 (k-1) . Cuando el período de control es igual a 2 segundos, la dinámica del proceso simulado se puede describir mediante una ecuación del mismo orden que el modelo AP de la ecuación (6) , es decir, con el mismo número de parámetros. En este caso, el mecanismo de adaptación del controlador ADEX será capaz de identificar satisfactoriamente la dinámica del proceso utilizando el modelo AP descrito por la ecuación (6) . Por lo tanto, el período de control de 1 segundo está por debajo del umbral de modelado para un controlador ADEX que utiliza el modelo AP de la ecuación (6) y no se puede esperar un rendimiento de control satisfactorio. Sin embargo, si el período de control se incrementa a 2 segundos, el mismo controlador ADEX puede lograr una buena identificación de la dinámica del proceso y, como resultado, un rendimiento de control satisfactorio, es decir, el período de control de 2 segundos está por encima del umbral de modelado. Sin embargo, gracias a la invención es posible obtener un rendimiento de control satisfactorio a pesar de usar un período de control por debajo del umbral de modelado. Las curvas de evolución de la FIG. 2 presentan los resultados obtenidos en la aplicación del controlador ADEX, con un periodo de control de 1 segundo descrito en el primer escenario, al proceso simulado durante los primeros 6 minutos del experimento. Durante los segundos 6 minutos, se muestran los resultados los resultados obtenidos por el mismo controlador ADEX cuando el periodo de control es de 2 segundos. Las curvas de evolución en la parte superior de la figura representan la evolución de salida del proceso (línea gruesa) y su punto de consigna (línea fina) ; la escala se muestra en el eje izquierdo de las ordenadas. La curva de evolución en la parte inferior representa la señal de control generada por el controlador ADEX con periodos de control de 1 y 2 segundos y aplicada al proceso, su escala está representada en el eje derecho de ordenadas. La curva en la ase de la figura solo indica el instante en el que se produce el cambio en el período de control. Las curvas de evolución de la FIG. 3 presentan los resultados obtenidos en la aplicación del controlador ADEX, con un periodo de control de 1 segundo, al proceso simulado durante los primeros 6 minutos del experimento y, durante los segundos 6 minutos, los resultados obtenidos cuando la señal de control de dicho controlador se cambia por la señal de control al proceso generada por el sistema ADEX con función integral de control de la invención con un periodo de control también de 1 segundo. Las curvas de evolución y las escalas son equivalentes a las descritas para la FIG.2. Los resultados presentados en los primeros 6 minutos de la FIG. 2 muestran cómo la aplicación convencional, perteneciente al estado del arte previo, de un controlador ADEX que utiliza un período de control de 1 segundo, por debajo del umbral de modelado, no obtiene un rendimiento de control satisfactorio. Es decir, la salida del proceso bajo control oscila con una gran amplitud alrededor de su punto de consigna y la señal de control también oscila de manera similar, sin ninguna perspectiva para que el proceso se acerque a la estabilidad. Sin embargo, como se muestra por los resultados presentados en los segundos 6 minutos de la FIG. 2, cuando el mismo controlador ADEX empieza a utilizar un período de control de 2 segundos, sobre el umbral de modelado, la salida del proceso deja de oscilar y converge hacia el punto de consigna siguiendo una trayectoria de salida deseada. Además, los cambios posteriores en el punto de consigna hacen que la salida del proceso los alcance y se estabilice en ellos siguiendo asimismo una trayectoria de salida deseada, demostrando un rendimiento de control satisfactorio. Esta trayectoria deseada corresponde a la configuración del bloque conductor del controlador ADEX, que se ha descrito previamente. Los resultados presentados en los segundos 6 minutos de la FIG. 3 demuestran que un sistema ADEX con función integral de control puede obtener un rendimiento de control satisfactorio utilizando un período de control de 1 segundo, por debajo del umbral de modelado del controlador ADEX convencional utilizado en los primeros 6 minutos de esta misma figura. Desde el principio, la salida del proceso sigue una trayectoria deseada para alcanzar el punto de consigna y se estabiliza en él. Este rendimiento de control satisfactorio se reproduce en los cambios de consigna posteriores. También en este caso, esta trayectoria deseada corresponde a la configuración del bloque conductor del controlador ADEX, que se ha descrito previamente. Puede observarse que las trayectorias deseadas convergen hacia la consigna de forma mucho más rápida cuando la salida del proceso es controlada con un período de control e 1 segundo por el sistema ADEX con función integral de control (FIG. 3) , que cuando la salida del proceso es controlada por el controlador ADEX convencional con un período de control de 2 segundos (FIG. 2) . La razón es que el bloque conductor de un controlador ADEX genera la trayectoria deseada dependiendo del período de control, de forma que cuanto más corto es el período de control más rápidamente la trayectoria deseada de la salida del proceso bajo control se aproxima a su consigna. Como se ilustra en este ejemplo de simulación, el uso de sistemas ADEX con función integral de control permitirá obtener un rendimiento de control satisfactorio utilizando períodos de control por debajo de los umbrales de modelado de los controladores ADEX convencionales. El uso de estos períodos de control "cortos" es obligatorio para una amplia variedad de procesos industriales y, por lo tanto, el uso de sistemas ADEX con función integral de control representa un avance significativo en el rendimiento de control para este tipo de procesos industriales.
+ ES-2848475_B2 Procedimiento para generar un vector de control y sistema ADEX que lo aplica La invención se refiere a un sistema de control adaptativo predictivo experto, denominado sistema ADEX, que utiliza una función integral de la señal de control aplicada al proceso para controlar variables de salida de procesos monovariables o multivariables, donde los parámetros del proceso son conocidos o desconocidos y constantes o variables en el tiempo. El sistema ADEX de la presente invención implementa una estrategia de control en la cual un controlador adaptativo predictivo experto, denominado controlador ADEX, utiliza en sus dominios adaptativos predictivos un modelo adaptativo predictivo que relaciona dinámicamente la salida del proceso a controlar con una función integral de la señal de control que se aplica al proceso, en lugar de relacionar dinámicamente dicha salida del proceso con la señal que se aplica al proceso como hacen los controladores ADEX convencionales del estado del arte previo. De esta manera, la salida de dicho controlador ADEX es una función integral de la señal de control. A partir de esta función integral dicha estrategia de control utiliza un operador diferencial para calcular la acción de control real que se aplica al proceso. ESTADO DE LA TÉCNICA La invención se enmarca en el área de los sistemas de control digital que utilizan un computador que contiene un programa que se ejecuta periódicamente en una pluralidad de instantes de control k, para producir una señal de control que en cada uno de dichos instantes k se aplica al aparato que realiza el proceso para controlar la evolución de variables de salida del mismo. La invención, como procedimiento, define la secuencia de operaciones que determina dicho programa y, como sistema, define los conjuntos de instrucciones que se ejecutan de forma coherente con el soporte de dicho computador para calcular y aplicar la señal de control en cuestión al aparato que realiza el proceso. El libro "ADEX Optimized Adaptive Systems and Controllers: From Research to Industrial Practice", publicado por la editorial Springer en 2015, describe la metodología, la teoría de estabilidad y diversas aplicaciones de los controladores Adaptativos Predictivos Expertos, que fueron introducidos, definidos y descritos en detalle en la patente en EE. UU. No. 6.662.058 B1. Estos controladores representan una extensión metodológica de os controladores adaptativos predictivos definidos previamente en las patentes en EE.UU. Nos. 4, 197, 576 y 4, 358, 822. Dicho libro denomina a estos controladores como controladores ADEX y este documento utilizará por simplicidad la misma nomenclatura de controlador ADEX para los controladores descritos en las previamente mencionadas patentes en EE. UU. Como se describe en la patente de EE.UU. No. 6.662.058 B1, un controlador ADEX en sus dominios de operación denominados Adaptativos Predictivos, ajusta en cada instante de control los parámetros de un modelo adaptativo predictivo (AP) que identifica una relación dinámica entre las variables del proceso y una señal de control a aplicar al proceso; y utiliza dicho modelo AP para calcular la señal de control que debe aplicarse al proceso para que la predicción de la variable de salida del proceso a controlar sea igual a un valor deseado para dicha variable de salida del proceso. Los controladores ADEX pueden asimismo incluir dominios de operación denominados expertos, en los cuales la señal de control se genera mediante reglas que imitan la actuación del control manual realizado por un operador humano. Los controladores adaptativos predictivos descritos en las patentes en EE.UU. Nos. 4, 197, 576 y 4, 358, 822 pueden definirse como controladores ADEX que operan únicamente en un solo dominio adaptativo predictivo. En consecuencia, la referencia a controladores ADEX que se realiza en lo que sigue de este documento incluye también el conjunto de controladores adaptativos predictivos definidos en dichas patentes americanas, dado que la presente invención concierne únicamente a la aplicación de controladores ADEX en sus dominios adaptativos predictivos. Asimismo, dicho libro distingue claramente entre controladores ADEX y sistemas ADEX de la siguiente manera: mientras que un controlador ADEX se ha definido en la patente de EE. UU. No. 6.662.058 B1 y se utiliza para controlar variables de salida de un proceso, un sistema ADEX se define mediante una estrategia de control para un proceso en la que se utilizan controladores ADEX para lograr un mejor rendimiento global en la operación del proceso. En este caso, un sistema ADEX será innovador si la estrategia de control que lo define es innovadora. La invención está relacionada con un sistema ADEX para controlar variables de salida de procesos monovariables o multivariables mediante el uso de una estrategia de control que genera una función integral de la señal de control que se aplica al proceso en los distintos instantes de control y utiliza esta función integral de tal manera que el rendimiento de control obtenido para dichas variables de salida mejora significativamente, en un rango de períodos de control pequeños con respecto a la dinámica del proceso, el endimiento que se obtendría por la aplicación directa de un controlador ADEX convencional, perteneciente al estado del arte previamente patentado, en el mismo contexto de aplicación. Generalmente se denomina periodo de control al tiempo transcurrido entre dos instantes de control consecutivos en la operación de un controlador o de un sistema de control. En la aplicación de los controladores ADEX, el período de control se elige generalmente teniendo en cuenta la dinámica del proceso. Así pues, si el proceso tiene una dinámica lenta, el periodo de control se elegirá para este tipo de proceso más largo que el que se elegiría para un proceso con una dinámica más rápida. En general, el período de control se elige igual a un porcentaje del denominado tiempo de la respuesta natural del proceso, es decir, del tiempo que tarda el proceso en pasar de un estado de equilibrio a otro en respuesta a una entrada al proceso en escalón. Una elección razonable del periodo de control podría generalmente estar en un rango entre un décimo y un veinteavo del tiempo de respuesta natural del proceso. Con frecuencia, el período de control se determina por consideraciones prácticas, como puede ser la frecuencia de las perturbaciones que actúan sobre el proceso y cuyo efecto tiene que ser compensado por la señal de control. Esta clase de sistema ADEX es útil en una gran variedad de áreas donde el control de procesos es importante para el rendimiento económico de las plantas, tales como el área del cemento o la de la energía y, en general, en la industria. Ejemplos de procesos en los que este sistema ADEX se puede aplicar ventajosamente son los molinos de cemento, donde la finura del producto molido se controla mediante la entrada de caudal de Clinker, o las centrales eléctricas de carbón, donde la potencia generada se controla mediante la entrada de caudal de carbón. A menudo es difícil identificar una relación dinámica entre las variables de salida a controlar en este tipo de procesos y las entradas al proceso o señales de control, lo que explica el bajo rendimiento de control que generalmente obtienen en este contexto técnicas de control como la de los Controladores Avanzados Basados en Modelos, donde el modelo representa el resultado de tal identificación. Es sabido que los Controladores Avanzados Basados en Modelo utilizan una relación de entrada/salida (E/S) del proceso o modelo del proceso para predecir la evolución de las variables de salida del proceso. La fiabilidad de dicha predicción depende del valor de los parámetros del modelo del proceso, denominado modelo predictivo. Algunas soluciones requieren predeterminar el valor de dichos parámetros del modelo antes de que el controlador en cuestión inicie su operación de control automático; este es el caso de los llamados Controladores Predictivos Basados en Modelo. Otras soluciones de control, denominado adaptativo, actualizan un modelo del proceso en tiempo real por medio de un mecanismo de adaptación, de tal manera que los cambios que pueden ocurrir en la dinámica del proceso pueden incorporarse rápidamente en el modelo del proceso; al mismo tiempo dicho modelo del proceso, denominado en este caso modelo adaptativo predictivo, se utiliza para predecir la evolución de las variables de salida del proceso y para controlar el proceso. Este es el caso de los previamente mencionados controladores ADEX en sus dominios de operación adaptativos predictivos. Es sabido también que el valor de los parámetros de un modelo capaz de representar la dinámica de un proceso depende del período de control elegido. En consecuencia, tanto para los controladores predictivos basados en modelo como para los controladores ADEX, la elección del período de control determinará el rango de magnitud del valor de los parámetros del modelo predictivo o adaptativo predictivo. Se sabe que la elección del período de control por debajo de un cierto umbral de tiempo, denominado "umbral de modelado", que es relativamente pequeño con respecto al previamente mencionado tiempo de respuesta natural del proceso bajo control, hace que el valor de un conjunto de parámetros del modelo predictivo o adaptativo predictivo se aproxime en valor absoluto excesivamente a cero. Esto hace que estos parámetros aumenten su sensibilidad a cualquier pequeño error de identificación en su valor y, por lo tanto, el uso del valor de estos parámetros en la predicción de la evolución de la variable de salida del proceso bajo control y en el cálculo de la señal de control que se aplicará al proceso, puede deteriorar significativamente el rendimiento del controlador. Un escenario de control con períodos de control mayores que dicho umbral de modelado evitaría que dicho conjunto de parámetros del modelo predictivo o adaptativo predictivo se aproximara indeseablemente al valor cero y reduciría su sensibilidad a pequeños errores de identificación. Sin embargo, en la práctica, la elección de estos períodos de control más grandes puede no ser posible, ya que limitarían la precisión y la capacidad de reacción del sistema de control a perturbaciones que la señal de control no podría contrarrestar hasta el final del período de control. Por ejemplo, el período de control que generalmente se aplica para establecer los cambios en la alimentación de clínker de un molino de cemento generalmente es cercano a 30 segundos, y el período de control que generalmente se aplica para establecer los cambios en el caudal de carbón de una central eléctrica es de aproximadamente 1 minuto. En ambos casos, el período de control está por debajo del umbral de modelado. Por lo tanto, el rendimiento de control de dichos controladores avanzados basados en modelos, adaptativos o no adaptativos, es eneralmente subóptimo con un margen significativo de mejora bajo el período de control requerido por la práctica. También puede ocurrir que, cuando el período de control está por debajo de un cierto umbral de modelado, el modelo utilizado por el controlador avanzado sea de "orden reducido", es decir, que el número de parámetros de dicho modelo no sea suficiente para identificar satisfactoriamente la dinámica completa del proceso, lo que resultará en un rendimiento deficiente en la aplicación del controlador. En este caso, el aumentar el período de control sobre dicho umbral de modelado puede hacer que el número de parámetros del modelo utilizado en el controlador sea suficiente para lograr una identificación satisfactoria de la dinámica del proceso y, como resultado, un mejor rendimiento del control. Sin embargo, como se ha explicado anteriormente, la elección de un período de control por debajo del umbral de modelado puede ser obligatoria y puede deteriorar significativamente el rendimiento de control. BREVE DESCRIPCIÓN DE LA INVENCIÓN El sistema ADEX de la presente invención utiliza un computador digital para aplicar una estrategia de control de procesos en la cual se utiliza un controlador Adaptativo Predictivo Experto (ADEX) . Este controlador ADEX usa en sus dominios adaptativos predictivos un modelo adaptativo predictivo que relaciona dinámicamente la salida del proceso bajo control con una función integral de la señal de control que se aplica al proceso. De esta manera, la salida de dicho controlador ADEX no es la señal de control a aplicar al proceso como en el estado del arte previo, sino una función integral de la señal de control que debe aplicarse al proceso. A partir de esta función integral dicha estrategia de control utiliza un operador diferencial para calcular la acción de control real que se aplica al proceso. Así pues, el procedimiento de control de la invención, para el cálculo de la señal de control en cada instante k, está caracterizado por comprender las etapas de: 1) Generar una función integral de la señal de control que se aplica al proceso ejecutando la secuencia de operaciones de un controlador ADEX en uno de sus dominios adaptativos predictivos, cuyo modelo adaptativo predictivo relaciona la salida del proceso con dicha función integral de la señal de control, con el fin de conducir la salida del proceso hacia su consigna. 2) Calcular una segunda función integral de la señal de control a aplicar al proceso hasta el instante k - 1. 3) Calcular la señal de control a aplicar al proceso utilizando un operador diferencial que deriva dicha señal de control a partir de las funciones integrales previamente consideradas. 4) Aplicar dicha señal de control al aparato que realiza el proceso para controlar la evolución de sus variables de salida. Por su parte, el sistema ADEX que aplica este procedimiento comprende un computador controlador para generar la señal de control que se aplica en cada instante k al aparato que realiza el proceso, que está configurado por conjuntos de instrucciones y medios para operar como: a. Un controlador ADEX que opera en un dominio adaptativo predictivo y cuyo modelo adaptativo predictivo relaciona dinámicamente la salida del proceso a controlar con una función integral de la señal de control a aplicar al proceso, de forma que la salida de dicho controlador ADEX es dicha función integral de la señal de control y se calcula para guiar dicha salida del proceso hacia su punto de consigna; b. Un bloque integrador que genera una segunda función integral de la señal de control a aplicar al proceso hasta el instante k - 1; c. Un bloque diferencial que calcula dicha señal de control a aplicar al proceso a partir de las dos funciones integrales previamente consideradas; d. Medios que aplican dicha señal de control al aparato que realiza el proceso para controlar la evolución de las variables de salida del mismo. BREVE DESCRIPCIÓN DE LOS DIBUJOS Para una mejor comprensión de la invención, se incluyen las siguientes figuras, que representan un ejemplo de realización y que no deben ser consideradas más que como una forma de ilustrar y aclarar la invención. La FIG. 1 muestra la estructura general y conceptual de un sistema ADEX con función integral de control según una realización. La FIG. 2 muestra un gráfico de curvas de tendencia durante dos períodos consecutivos de tiempo. Durante un período inicial de 6 minutos, las curvas de tendencia representan el resultado de una aplicación directa de un controlador ADEX con un período de control por debajo del umbral de modelado a un proceso simulado. Durante un segundo período e 6 minutos, las curvas de tendencia continúan representando el resultado de la aplicación directa del mismo controlador ADEX a dicho proceso simulado, pero en este segundo período el período de control de este controlador ADEX se ha cambiado a un valor sobre el umbral de modelado. Las curvas de tendencia en la parte superior de la figura representan la evolución de salida del proceso (línea gruesa) y su punto de consigna (línea fina) , la escala para ambas curvas está en el eje de ordenadas del lado izquierdo. La curva de tendencia en el medio representa la señal de control generada por el controlador ADEX y aplicada al proceso, la escala está en el eje de ordenadas del lado derecho. La curva de tendencia en la parte inferior es solo para indicar cuándo se ha cambiado el período de control. La FIG. 3 también muestra un gráfico de curvas de tendencia durante dos períodos de tiempo consecutivos. Los resultados presentados en el período inicial de 6 minutos son equivalentes a los presentados en el período inicial de la FIG. 2, es decir, el resultado de una aplicación directa del mismo controlador ADEX de la FIG.2 con un período de control por debajo del umbral de modelado al mismo proceso simulado. Durante el segundo período de 6 minutos, la señal de control aplicada al proceso se cambia a la generada por un sistema ADEX con función integral de control de la presente invención y el período de control se mantiene igual al utilizado durante el período inicial. Las curvas de tendencia tienen un significado equivalente a las de la FIG. 2. MODOS DE REALIZACIÓN DE LA INVENCIÓN A continuación, se describe de manera breve una forma de realización de la invención, como ejemplo ilustrativo y no limitativo de ésta. En cualquier instante de control k, el operador humano puede optar por aplicar control manual o control automático a la variable de proceso que se desea controlar; ambas formas de control se muestran en la FIG. 1 y se describen con referencia a dicha figura a continuación: 1. Control manual: bajo control manual, la señal de control u ( k ) se aplica directamente desde el operador (2) al aparato (4) que lleva a cabo el proceso que se está controlando y al bloque integrador A (7) como se muestra en el camino (1) . Un sensor (5) asociado al aparato (4) mide la variable de salida del proceso y (k) a controlar. Esta variable y (k) se aplica como variable de salida del proceso a controlar, como se muestra en el camino (6) , al controlador ADEX (9) . El bloque integrador A (7) calcula una función integral de control en k-1, U (k-1) , integrando icha señal de control u (k) entre dos instantes de control previos, k-5 y k-1, donde 5 es un número entero que representa el intervalo de integración en períodos de control, siendo 5 > 2. Dicha función integral de control en k-1, U (k-1) , se aplica como salida del controlador en k-1 al Controlador ADEX (9) . Por lo tanto, bajo control manual, el Controlador ADEX (9) recibe como entradas: 1) dicha variable de salida del proceso y (k) , y 2) dicha función integral de control en k-1, U (k-1) . Esto permite que el Controlador ADEX (9) funcione en el modo de identificación para dominios adaptativos predictivos (AP) descrito en la patente estadounidense No. US 6, 662, 058 B1. Dicho modo de identificación ajustará los parámetros del modelo adaptativo predictivo (AP) para el dominio operativo correspondiente del controlador ADEX (9) , de tal manera que dicho modelo AP representará una relación dinámica entre dicha variable de salida del proceso y (k) y dicha función integral de control U (k-1) y, por lo tanto, será capaz de predecir valores futuros de dicha variable de salida de proceso y (k) en función de una secuencia futura de valores de dicha función integral de control U (k-1) . Control automático: bajo control automático, el valor de la consigna SP (k) para la variable de salida del proceso y (k) se aplica directamente desde el operador (2) al Controlador ADEX (9) , como se muestra en el camino (8) . Asimismo, la variable de salida de proceso medida y (k) se aplica al controlador ADEX (9) desde el sensor (5) como se muestra en el camino (6) . Esto permite que el Controlador ADEX (9) funcione en el modo automático para dominios adaptativos predictivos (AP) descrito en la patente estadounidense No. US 6, 662, 058 B1. En dicho modo automático, a partir de la variable de salida del proceso y (k) y su consigna SP (k) , el controlador ADEX (9) genera como salida del controlador una función integral de control en k , U (k) , que en este caso representa la integración de dicha señal de control del proceso u (k) entre dos instantes de control, k+1-5 y k. La salida U (k) del Controlador ADEX (9) se aplica al Bloque Diferencial (10) que calcula la señal de control u (k) que se aplica al proceso. El bloque integrador B (11) calcula una segunda función integral Uk+ (k-1) integrando dicha señal de control u (k) entre los instantes de control previos, k+1-5 y k-1. Dicha segunda función integral Uk-1 (k-1) se resta de dicha función integral de control en k, U (k) , dentro del bloque diferencial (10) para generar la señal de control u (k) que se aplica al aparato (4) que lleva a cabo el proceso que se está controlando. Las operaciones específicas que el Sistema ADEX de esta invención llevará a cabo en cada instante de control k para controlar automáticamente la variable de salida del proceso y (k) se describen a continuación: (a) Medición por el sensor (5) de la variable de salida del proceso realizado por el aparato (4) para obtener la variable de salida del proceso y (k) a controlar. (b) Cálculo de la función integral de control en k, U (k) , por el controlador ADEX (9) como salida del controlador. Este controlador calcula la función integral de control U (k) a partir del valor de la salida del proceso a controlar, y (k) , y el valor de su consigna en k, SP (K) , aplicado directamente desde el operador (2) al Controlador ADEX (9) , y ejecutando la secuencia de operaciones descrita en la patente de EE. UU. No. 6, 662, 058 B1 para controladores ADEX en dominios de operación adaptativos predictivos. (c) Cálculo de dicha segunda función integral Uk - i (k-1) por medio de la ecuación que determina la operación del bloque integrador B (11) dentro del bloque diferencial: donde Uk -i (k -1) se obtiene integrando las señales de control previas u (k) desde el instante k-1 al instante k+1-5, y 5 > 2 es un entero seleccionado convenientemente por el diseñador del sistema ADEX. (d) Cálculo de la señal de control u (k) en el bloque diferencial por medio de: u (k) = U (k) - Uk-1 (k-1) (2) (e) Aplicación de la señal de control u (k) al aparato que realiza el proceso. En su implementación, el Sistema ADEX de la presente invención puede aplicarse a una variable de salida de proceso escalar, y (k) , como se consideró anteriormente, o a un vector de salida de proceso, y (k) , compuesto de n componentes de salida escalares, que son n variables escalares de salida del proceso. En este caso, el sistema ADEX se puede aplicar a cada una de dichas n componentes escalares del vector de salida del proceso, como se describió anteriormente, pero teniendo en cuenta la naturaleza multivariable del proceso, dicho controlador ADEX puede ser un controlador multivariable ADEX que guía dicho vector de salida de proceso y (k) hacia su vector de consigna SP (k) . Dicho controlador ADEX multivariable calcula como su salida un vector función integral de ontrol en k, U (k) , que se aplicará a un bloque diferencial multivariable en el que un bloque integrador calculará un segundo vector función integral Uk-i (k-1) por medio de: Uk-i (k-1) = SfzTi1 u (k i) , 5 > 2 (3) donde u (k - i) es el vector de control que se ha aplicado en los instantes k - i al aparato que desarrolla el proceso y el vector de control u (k ) , que se aplica al aparato que desarrolla el proceso en el instante k, se calcula en dicho bloque diferencial por medio de: u (k) = U (k) - Uk-i (k-1) (4) EJEMPLO El rendimiento del sistema ADEX con función integral de la señal de control de la presente invención se ilustrará controlando un proceso simulado mono variable, con una entrada, u ( k ) , y una salida, y ( k ) , ambas en el instante k, que se miden como incrementos de sus valores cuando el proceso esta en estado de equilibrio, considerando que el proceso está en equilibrio cuando ambas variables de entrada y salida son iguales a cero. Cuando el período de control es igual a 1 segundo, la dinámica del proceso simulado puede describirse mediante la siguiente ecuación: y (k) = y (k) + 0.1 u (k 1) + o.1 u (k 2) + 0.2 u (k 3) + 0.2 u (k 4) (5) Para ilustrar el rendimiento del sistema ADEX de la invención, el proceso simulado se controlará en los diferentes escenarios que se describen a continuación: En un primer escenario, se utiliza para controlar el proceso simulado un controlador ADEX que opera en un dominio adaptativo predictivo, usando la secuencia de operaciones descrita en US6662058B1 y con un período de control de 1 segundo y un horizonte de predicción de 5 períodos de control. Los parámetros del bloque conductor del controlador ADEX, que genera la trayectoria deseada para la salida del proceso, son iguales a los de un modelo de segundo orden con una constante de tiempo igual a 1, 5 períodos de control, una ganancia y una relación de amortiguamiento igual a 1, y el modelo adaptativo predictivo (AP) , que relaciona la salida del proceso con la señal de control, es de primer orden con dos parámetros, de forma que calcula la estimación a priori de la salida del proceso en el instante k, y (kik 1) , mediante la ecuación: y (klk Como se describe en las patentes previamente citadas, el mecanismo de adaptación del controlador ADEX ajustará los parámetros de este modelo para hacer que dicha estimación a priori de la salida del proceso converja hacia la salida del proceso misma. Utilizando este mismo modelo AP, la predicción de la salida del proceso en el instante k + 1, y (k + 1ik) , a partir de la señal de control u (k) aplicada en el instante k viene dada por: y (k + 11k) = y (k) + b1 (k) u (k) + b2 (k) * u (k 1) (7) La señal de control u (k) generada por el controlador ADEX en el instante k hará la salida predicha del proceso en el instante k + 1, y (k + 1ik) , igual a la salida deseada generada en el instante k por el bloque conductor para ese mismo instante k + 1, yd (k + 1ik) . Por lo tanto, igualando dicha salida deseada a dicha salida predicha en la ecuación (7) y despejando, u (k) verificará la siguiente ecuación: u (k) = [yd (k + 11 k) y (k) b2 (k) * u (k 1) ] / bi (k) (8) En un segundo escenario, se utiliza para controlar el proceso simulado un controlador ADEX que opera en un dominio adaptativo predictivo, con la secuencia de operaciones de la patente US6662058B1, que tiene la misma configuración que el controlador ADEX del primer escenario, salvo que el período de control es igual a 2 segundos. Finalmente, en un tercer escenario, se utiliza para controlar el proceso simulado una realización del sistema ADEX con función integral de la señal de control, que se ha descrito previamente para ilustrar la invención, con un valor de 5, que determina el horizonte para el cálculo de la función integral de la señal de control, igual a 10, y un controlador ADEX que tiene la misma configuración que la del controlador ADEX considerado en el primer escenario, y un modelo adaptativo predictivo que, de acuerdo con la invención, relaciona dinámicamente la salida del proceso con dicha función integral de la señal de control U (k) , de forma que en este caso calcula la estimación a priori de la salida del proceso en el instante k, y (kik 1) , mediante la ecuación: y (klk 1) = y (k 1) + b1 (k 1) * U (k 1) + b2 (k 1) * U (k 2) (9) Utilizando este mismo modelo AP la salida del controlador ADEX en el instante k, U (k) , verificará la siguiente ecuación: U (k) = [yd (k + 1lk) y (k) b2 (k) *U (k 1) ] / bi (k) (10) Donde, análogamente a la ecuación (8) , yd (k + 1ik) es el valor de la trayectoria deseada para la salida del proceso en el instante de control k + 1. El modelo AP descrito por la ecuación (6) , que estima la salida del proceso y (k) y opera con un período de control de 1 segundo, tiene un orden reducido con respecto a la ecuación (5) , que representa la dinámica del proceso cuando el período de control también es de 1 segundo. Para este período de control de 1 segundo, el modelo AP de la ecuación (6) no tiene la estructura paramétrica adecuada para permitir que el mecanismo de adaptación del controlador ADEX pueda realizar la identificación de la dinámica del proceso descrito por la ecuación (5) , porque en la ecuación (6) solo hay 2 parámetros bi (k - 1) , y necesitaría tener otros 2 parámetros: S3 (k-1) y S4 (k-1) . Cuando el período de control es igual a 2 segundos, la dinámica del proceso simulado se puede describir mediante una ecuación del mismo orden que el modelo AP de la ecuación (6) , es decir, con el mismo número de parámetros. En este caso, el mecanismo de adaptación del controlador ADEX será capaz de identificar satisfactoriamente la dinámica del proceso utilizando el modelo AP descrito por la ecuación (6) . Por lo tanto, el período de control de 1 segundo está por debajo del umbral de modelado para un controlador ADEX que utiliza el modelo AP de la ecuación (6) y no se puede esperar un rendimiento de control satisfactorio. Sin embargo, si el período de control se incrementa a 2 segundos, el mismo controlador ADEX puede lograr una buena identificación de la dinámica del proceso y, como resultado, un rendimiento de control satisfactorio, es decir, el período de control de 2 segundos está por encima del umbral de modelado. Sin embargo, gracias a la invención es posible obtener un rendimiento de control satisfactorio a pesar de usar un período de control por debajo del umbral de modelado. Las curvas de evolución de la FIG. 2 presentan los resultados obtenidos en la aplicación del controlador ADEX, con un periodo de control de 1 segundo descrito en el primer escenario, al proceso simulado durante los primeros 6 minutos del experimento. Durante los segundos 6 minutos, se muestran los resultados los resultados obtenidos por el mismo controlador ADEX cuando el periodo de control es de 2 segundos. Las curvas de evolución en la parte superior de la figura representan la evolución de salida del proceso (línea gruesa) y su punto de consigna (línea fina) ; la escala se muestra en el eje izquierdo de las ordenadas. La curva de evolución en la parte inferior representa la señal de control generada por el controlador ADEX con periodos de control de 1 y 2 segundos y aplicada al proceso, su escala está representada en el eje derecho de ordenadas. La curva en la ase de la figura solo indica el instante en el que se produce el cambio en el período de control. Las curvas de evolución de la FIG. 3 presentan los resultados obtenidos en la aplicación del controlador ADEX, con un periodo de control de 1 segundo, al proceso simulado durante los primeros 6 minutos del experimento y, durante los segundos 6 minutos, los resultados obtenidos cuando la señal de control de dicho controlador se cambia por la señal de control al proceso generada por el sistema ADEX con función integral de control de la invención con un periodo de control también de 1 segundo. Las curvas de evolución y las escalas son equivalentes a las descritas para la FIG.2. Los resultados presentados en los primeros 6 minutos de la FIG. 2 muestran cómo la aplicación convencional, perteneciente al estado del arte previo, de un controlador ADEX que utiliza un período de control de 1 segundo, por debajo del umbral de modelado, no obtiene un rendimiento de control satisfactorio. Es decir, la salida del proceso bajo control oscila con una gran amplitud alrededor de su punto de consigna y la señal de control también oscila de manera similar, sin ninguna perspectiva para que el proceso se acerque a la estabilidad. Sin embargo, como se muestra por los resultados presentados en los segundos 6 minutos de la FIG. 2, cuando el mismo controlador ADEX empieza a utilizar un período de control de 2 segundos, sobre el umbral de modelado, la salida del proceso deja de oscilar y converge hacia el punto de consigna siguiendo una trayectoria de salida deseada. Además, los cambios posteriores en el punto de consigna hacen que la salida del proceso los alcance y se estabilice en ellos siguiendo asimismo una trayectoria de salida deseada, demostrando un rendimiento de control satisfactorio. Esta trayectoria deseada corresponde a la configuración del bloque conductor del controlador ADEX, que se ha descrito previamente. Los resultados presentados en los segundos 6 minutos de la FIG. 3 demuestran que un sistema ADEX con función integral de control puede obtener un rendimiento de control satisfactorio utilizando un período de control de 1 segundo, por debajo del umbral de modelado del controlador ADEX convencional utilizado en los primeros 6 minutos de esta misma figura. Desde el principio, la salida del proceso sigue una trayectoria deseada para alcanzar el punto de consigna y se estabiliza en él. Este rendimiento de control satisfactorio se reproduce en los cambios de consigna posteriores. También en este caso, esta trayectoria deseada corresponde a la configuración del bloque conductor del controlador ADEX, que se ha descrito previamente. Puede observarse que las trayectorias deseadas convergen hacia la consigna de forma mucho más rápida cuando la salida del proceso es controlada con un período de control e 1 segundo por el sistema ADEX con función integral de control (FIG. 3) , que cuando la salida del proceso es controlada por el controlador ADEX convencional con un período de control de 2 segundos (FIG. 2) . La razón es que el bloque conductor de un controlador ADEX genera la trayectoria deseada dependiendo del período de control, de forma que cuanto más corto es el período de control más rápidamente la trayectoria deseada de la salida del proceso bajo control se aproxima a su consigna. Como se ilustra en este ejemplo de simulación, el uso de sistemas ADEX con función integral de control permitirá obtener un rendimiento de control satisfactorio utilizando períodos de control por debajo de los umbrales de modelado de los controladores ADEX convencionales. El uso de estos períodos de control "cortos" es obligatorio para una amplia variedad de procesos industriales y, por lo tanto, el uso de sistemas ADEX con función integral de control representa un avance significativo en el rendimiento de control para este tipo de procesos industriales.
Publicaciones:
ES2848475 (09/08/2021) - A1 Solicitud de patente con informe sobre el estado de la técnica
ES2848475 (25/01/2022) - B2 Patente de invención con examen
Eventos:
En fecha 06/02/2020 se realizó Registro Instancia de Solicitud
En fecha 07/02/2020 se realizó Admisión a Trámite
En fecha 07/02/2020 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 10/02/2020 se realizó Concesión solicitud de reducción de tasas
En fecha 11/02/2020 se realizó Superado examen de oficio
En fecha 14/02/2020 se realizó Publicación concesión reducción de tasas
En fecha 18/02/2020 se realizó 3406X_Solicitud Correcciones
En fecha 20/02/2020 se realizó 1551X_Notificación Correcciones Admitidas
En fecha 11/09/2020 se realizó Realizado IET
En fecha 14/09/2020 se realizó 1109P_Comunicación Traslado del IET
En fecha 22/12/2020 se realizó PETEX_Petición de examen sustantivo
En fecha 23/02/2021 se realizó 5215P_Observaciones del solicitante al IET, Opinión Escrita y/o alegaciones a observaciones de terceros
En fecha 09/08/2021 se realizó Publicación Solicitud
En fecha 09/08/2021 se realizó Publicación Folleto Solicitud con IET (A1)
En fecha 24/11/2021 se realizó Validación petición y/o pago de examen sustantivo conforme
En fecha 07/12/2021 se realizó Designación de Comisión de Expertos
En fecha 10/01/2022 se realizó Finalización de Examen Sustantivo
En fecha 10/01/2022 se realizó 6121P_Comunicación finalización de examen sustantivo
En fecha 14/01/2022 se realizó Publicación finalización de examen sustantivo
En fecha 18/01/2022 se realizó Concesión con examen sustantivo
En fecha 18/01/2022 se realizó Entrega título
En fecha 18/01/2022 se realizó 6125P_Notificación de concesión con examen sustantivo
En fecha 25/01/2022 se realizó Publicación concesión Patente
En fecha 25/01/2022 se realizó Publicación Folleto Concesión
En fecha 26/07/2022 se realizó Plazo expirado presentación de oposiciones contra la concesión de la Patente
Pagos:
06/02/2020 - Pago Tasas IET
03/03/2022 - Pago 03 Anualidad
02/03/2023 - Pago 04 Anualidad
Fuente de la información
Parte de la información aquí publicada es pública puesto que ha sido obtenida de la Oficina de Propiedad Industrial de los diferentes países el 26/04/2024 y por lo tanto puede ser que la información no esté actualizada.Parte de la información aquí mostrada ha sido calculada por nuestro sistema informático y puede no ser veraz.
Privacidad
Si considera que al información aquí publicada afecta a su privacidad y desea que eliminemos la información aquí publicada envíe un email a info@patentes-y-marcas.com o rellene el formulario que encontrará aquí.Información sobre el registro de patente nacional por Procedimiento para generar un vector de control y sistema ADEX que lo aplica con el número P202030096
El registro de patente nacional por Procedimiento para generar un vector de control y sistema ADEX que lo aplica con el número P202030096 fue solicitada el 06/02/2020. Se trata de un registro en España por lo que este registro no ofrece protección en el resto de países. El registro Procedimiento para generar un vector de control y sistema ADEX que lo aplica con el número P202030096 fue solicitada por ADAPTIVE PREDICTIVE EXPERT CONTROL ADEX SA mediante los servicios del agente Magdalena Alesci Naranjo. El registro [modality] por Procedimiento para generar un vector de control y sistema ADEX que lo aplica con el número P202030096 está clasificado como G05B 13/04,G05B 21/00,G05D 11/00 según la clasificación internacional de patentes.
Otras invenciones solicitadas por ADAPTIVE PREDICTIVE EXPERT CONTROL ADEX SA
Es posible conocer todas las invenciones solicitadas por ADAPTIVE PREDICTIVE EXPERT CONTROL ADEX SA entre las que se encuentra el registro de patente nacional por Procedimiento para generar un vector de control y sistema ADEX que lo aplica con el número P202030096. Si se desean conocer más invenciones solicitadas por ADAPTIVE PREDICTIVE EXPERT CONTROL ADEX SA clicar aquí.Otras invenciones solicitadas en la clasificación internacional de patentes G05B 13/04,G05B 21/00,G05D 11/00.
Es posible conocer invenciones similares al campo de la técnica se refiere. El registro de patente nacional por Procedimiento para generar un vector de control y sistema ADEX que lo aplica con el número P202030096 está clasificado con la clasificación G05B 13/04,G05B 21/00,G05D 11/00 por lo que si se desea conocer más registros con la clasificación G05B 13/04,G05B 21/00,G05D 11/00 clicar aquí.Otras invenciones solicitadas a través del representante MAGDALENA ALESCI NARANJO
Es posible conocer todas las invenciones solicitadas a través del agente MAGDALENA ALESCI NARANJO entre las que se encuentra el registro patente nacional por Procedimiento para generar un vector de control y sistema ADEX que lo aplica con el número P202030096. Si se desean conocer más invenciones solicitadas a través del agente MAGDALENA ALESCI NARANJO clicar aquí.Patentes en España
Es posible conocer todas las invenciones publicadas en España entre las que se encuentra el registro patente nacional por Procedimiento para generar un vector de control y sistema ADEX que lo aplica. Nuestro portal www.patentes-y-marcas.com ofrece acceso a las publicaciones de patentes en España. Conocer las patentes registradas en un país es importante para saber las posibilidades de fabricar, vender o explotar una invención en España.Patentes registradas en la clase G
Es posible conocer todas las patentes registradas en la clase G (FISICA) entre las que se encuentra la patente Procedimiento para generar un vector de control y sistema ADEX que lo aplica con el número P202030096. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase G05
Es posible conocer todas las patentes registradas en la clase G05 (CONTROL; REGULACION) entre las que se encuentra la patente Procedimiento para generar un vector de control y sistema ADEX que lo aplica con el número P202030096. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase G05B
Es posible conocer todas las patentes registradas en la clase G05B (SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVO) entre las que se encuentra la patente Procedimiento para generar un vector de control y sistema ADEX que lo aplica con el número P202030096. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase G05D
Es posible conocer todas las patentes registradas en la clase G05D (SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS) entre las que se encuentra la patente Procedimiento para generar un vector de control y sistema ADEX que lo aplica con el número P202030096. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.
¿Tienes alguna duda?
Escribe tu consulta y te responderemos rápida y gratuitamente.

Otras patentes similares
 P202030122
P202030122
Profesionales Recomendados
Barcelona
933182440
España
933182440
España

Barcelona
+34 93 362 16 97
España
+34 93 362 16 97
España

Barcelona
932 593 600
España
932 593 600
España







