


- Home /
- Publicaciones de patentes /
- PROCEDIMIENTO DE DETECCIÓN PRECISA DE ESTRELLAS Y CENTROIDES
Patente nacional por "PROCEDIMIENTO DE DETECCIÓN PRECISA DE ESTRELLAS Y CENTROIDES"
Este registro ha sido solicitado por
Persona física
a través del representanteÁNGEL PONS ARIÑO
Contacto
- Estado: A punto de caducar
- País:
- España
- Fecha solicitud:
- 01/04/2022
- Número solicitud:
-
P202230299
- Número publicación:
-
ES2953758
- Fecha de concesión:
-
- Inventores:
-
Persona física
- Datos del titular:
-
Persona física
- Datos del representante:
-
Ángel Pons Ariño
- Clasificación Internacional de Patentes:
- G06T 7/66
- Clasificación Internacional de Patentes de la publicación:
- G06T 7/66
- Fecha de vencimiento:
Quiero registrar una patente

Reivindicaciones:
+ ES-2953758_A11.- Procedimiento de detección precisa de estrellas y centroides para un seguidor de estrellas, que comprende una cámara (2) y una unidad de procesamiento (4) , comprendiendo el procedimiento las etapas de: - toma de una primera fotografía (5) y una segunda fotografía consecutivas con la cámara (2) estática, estando las fotografías compuestas por unos píxeles (11) , tendiendo cada uno de los píxeles (11) una energía (8) característica, - recepción de la primera fotografía (5) píxel (11) a píxel (11) en la unidad de procesamiento (4) , conforme se toman las fotografías, - definición, en la primera fotografía (5) , de una ventana de filtro (7) que comprende N píxeles (11) , - aplicación, en la ventana de filtro (7) , de las siguientes subetapas: i) eliminación del píxel (11) si su energía (8) es inferior a un umbral U, ii) recorte del píxel (11) si su energía (8) es superior a un umbral R mayor que U, adoptando el píxel (11) dicho valor R, ni) suma de la energía (8) de los píxeles (11) de la ventana de filtro (7) , iv) definición de una región de interés en la ventana de filtro (7) si la suma es superior a un umbral Emin, superior a R, - desplazamiento de la ventana de filtro (7) y repetición de las etapas i) a iv) hasta que se analizan todos los píxeles (11) de la primera fotografía (5) , - unificación, en estrellas, de todas las regiones de interés separadas por una distancia inferior a Dmin en la primera fotografía (5) , - cálculo de una energía máxima Emax en las estrellas, siendo Emax la energía (8) del píxel (11) con mayor energía (8) de la estrella, - recepción de la segunda fotografía píxel (11) a píxel (11) en la unidad de procesamiento (4) , conforme se toman las fotografías, - aplicación, a cada uno de los píxeles (11) de la segunda fotografía, de las siguientes subetapas: I) eliminación del píxel (11) si su energía (8) es inferior a un porcentaje predeterminado de la suma del umbral U y Emax de la estrella a la que pertenezca el píxel (11) , II) cálculo del baricentro de la estrella a partir de la posición X e Y y la energía (8) de sus píxeles (11) , y III) cálculo del centroide de la estrella. 2.- El procedimiento de la reivindicación 1, en el que la ventana de filtro (7) es de un tamaño al menos el doble de la estrella más pequeña observable en la cámara (2) . 3.- El procedimiento de la reivindicación 1, en el que la ventana de filtro (7) es de un tamaño seleccionado en el rango de 8 y 16 píxeles. 4.- El procedimiento de la reivindicación 1, en el que umbral U tiene un valor prefijado superior al nivel de negro de la imagen (5) para evitar el ruido de esta. 5.- El procedimiento de la reivindicación 1, en el que el umbral U tiene un valor prefijado seleccionado en el rango de 150-200. 6.- El procedimiento de la reivindicación 1, en el que el umbral R tiene un valor de 3 o 4 veces el valor de U. 7.- El procedimiento de la reivindicación 1, en el que el umbral R tiene un valor seleccionado en el rango de 450-800. 8.- EI procedimiento de la reivindicación 1, en el que Emin es cuatro veces el valor de R. 9.- El procedimiento de la reivindicación 1, en el que Emin tiene un valor seleccionado en el rango de 1500-3000. 10.- El procedimiento de la reivindicación 1, en el que Dmin tiene un valor seleccionado en el rango de 80-200 píxeles. 11.- El procedimiento de la reivindicación 1, en el que el porcentaje de la suma del umbral U y Emax se seleccionad en el rango de 50-75%.
Los productos y servicios protegidos por este registro son:
G06T 7/66
Descripciones:
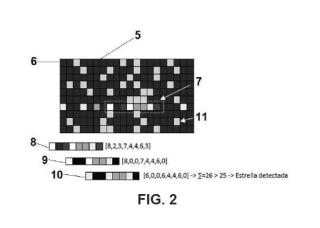
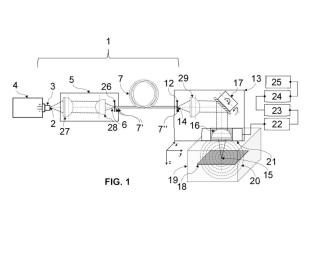
+ ES-2953758_A1 PROCEDIMIENTO DE DETECCIÓN PRECISA DE ESTRELLAS Y CENTROIDES OBJETO DE LA INVENCIÓN Se trata de un procedimiento de detección precisa de estrellas y centroides en recepción de imágenes sin almacenamiento en memoria, que facilita la detección y determinación de las estrellas a la vez que se recibe la imagen píxel a píxel, eliminando la necesidad de uso de una memoria intermedia o del almacenamiento de la imagen tomada (en RAM o disco duro, u otro tipo de dispositivo de memoria) . Este procedimiento es aplicable en la ingeniería espacial, para el uso en dispositivos de seguimiento de estrellas (star trackers) , utilizados para la determinación con alta precisión de la actitud u orientación de un satélite. A su vez, este procedimiento sería aplicable en seguidores de estrellas que sean utilizados en la industria militar o aeronáutica, donde su uso facilita la determinación de la orientación del vehículo, como cohetes, drones terrestres o aéreos, o aviones. ANTECEDENTES DE LA INVENCIÓN Los dispositivos de seguimiento de estrellas (star trackers) son dispositivos clave para el correcto funcionamiento de los satélites de hoy en día, tanto para comunicaciones como para observación terrestre. Éstos toman fotografías de las estrellas, las almacenan para procesarlas, detectan y determinan la posición de las estrellas en la foto, triangulan sus posiciones y comparan dicha triangulación con una información previamente almacenada en una base de datos. Buscan las estrellas que encajan con aquella triangulación y calculan el apuntamiento exacto según aquellas estrellas detectadas y sus posiciones en la fotografía. El tiempo que conlleva el procesamiento de tanta información limita en gran medida la operación y la velocidad de respuesta de los dispositivos de seguimiento de estrellas, y a la vez el procesamiento es bastante complejo, pues los requerimientos de precisión exigidos son muy altos. Las técnicas para detectar estrellas son diversas. Una primera alternativa consiste en usar un umbral de iluminación en una región de interés para detectar dónde hay una estrella. Este método está muy extendido, junto con técnicas de desenfocado. Otra técnica consiste en detectar píxeles por encima de umbrales y posteriormente evaluar los píxeles adyacentes. Estos procedimientos son extremadamente locales, de manera que fallan si algún píxel, bien dañado o bien por el ruido intrínseco, genera un valor por encima del umbral. Por otro lado, es conocido el método de cálculo del centroide. Se trata de un procedimiento sencillo pues consiste en una operación matemática aplicada sobre los píxeles que conforman la estrella. La clave está en seleccionar la región de interés necesaria que abarca los píxeles de interés. Existen otros métodos que consisten en la aplicación de plantillas de tamaño MxM en aquellos píxeles pertenecientes a la estrella, lo que implica un almacenamiento previo de la imagen tomada por la cámara, ya que para analizar el bloque completo deben haberse almacenado al menos M filas completas de píxeles, lo que requiere una gran cantidad de memoria disponible. En otras alternativas, se utiliza el Laplaciano aplicado en las fotos para detectar estrellas en situaciones de alta velocidad angular, lo que hace que las estrellas se emborronen y su energía se distribuye entre más píxeles, haciendo difícil su detección. Este método requiere el uso de ventanas cuadradas, al menos 3x3 píxeles, lo que requiere guardar en memoria la imagen previamente, ya que para analizar una matriz de 3x3 píxeles deben haberse almacenado al menos 3 filas completas de píxeles, lo que requiere una cantidad importante de memoria disponible (i.e. cámara de 2000x2000 píxeles, al menos 6000 píxeles) . Alternativamente, existe un método de umbralización por bloques para compensar los efectos variables de stray-light (luz indeseada entrando en la óptica desde ángulos extremos) . Dicha umbralización requiere guardar en memoria la imagen previamente, pues debe analizase cada bloque de píxeles por separado, cada uno de 128x128 píxeles, para calcular el umbral que debe aplicarse a cada píxel de cada bloque. En el documento de patente US8218013B1 se menciona un procedimiento para detectar estrellas mediante un procedimiento basado en medianas y promedios consecutivos aplicados por escaneo lineal. Otros documentos de patentes que expresan métodos de detección de estrellas y/o de cálculo de centroides, como las CN112348053, CN109141403, CN112200855, CN108716916, CN103591963, que hacen relación a cálculos y algoritmos aplicados a grandes cantidades de píxeles y datos, lo que requiere del almacenamiento previo de la imagen, por lo que necesitan memorias RAM, discos duros u otros dispositivos de memoria para aplicar sus procedimientos. En todos estos casos se hace necesario el almacenamiento intermedio de los datos de la imagen para su procesamiento: cálculos, sumas, divisiones, etc., de los bloques de píxeles en cuestión, ya se trate de líneas o de matrices. Esto encarece los productos, dificulta su diseño y desarrollo, y retrasa el tiempo de procesamiento. DESCRIPCIÓN DE LA INVENCIÓN El objeto de la invención es un procedimiento de detección precisa de estrellas y centroides en la recepción de imágenes sin almacenamiento en memoria. El procedimiento presenta las siguientes ventajas, respecto a los documentos del estado de la técnica: - Está basado en un sensor bidimensional que forma una matriz de píxeles, por lo que las imágenes tomadas pueden incluir decenas de estrellas y el procedimiento es capaz de procesarlas todas a la vez. Sin embargo, en los documentos del estado de la técnica solo se escanea una a una mediante el uso de un "sean mirror" y un sensor lineal (unidimensional) . - El presente procedimiento es más rápido al no requerir de ningún escaneo secuencial mediante mecanismos para cubrir todo un campo de visión bidimensional. - Los procedimientos del estado de la técnica requieren de información previa indicada por el satélite para identificar las estrellas "escaneadas", mientras que en la presente invención no es necesario disponer de información previa. - En algunos de los procedimientos del estado de la técnica se incluye la aplicación de más de seis procesos de filtrado y cálculos, siendo éstos muy omplejos (grandes ventanas y aplicación de máscaras calculadas automáticamente) y requiriendo de almacenamiento previo de datos. Sin embargo, la presente invención requiere de una menor cantidad de procesos de filtrado y sin almacenamiento de datos, por lo que es más rápido y eficiente para los mismos resultados. Se logra así la mitigación del impacto de píxeles defectuosos y radiados, y la mitigación del ruido del fondo. Por tanto, la presente invención supone una gran ventaja frente al estado de la técnica, al disponer un procedimiento con capacidad para detectar estrellas y determinar centroides conforme se reciben secuencialmente los píxeles que constituyen una imagen y sin necesidad de almacenamiento intermedio, por lo que: - no hace falta memoria (RAM u otras) por lo que es más barato y robusto frente a radiación en aplicaciones de satélites, - no se pierde tiempo en el almacenamiento de la imagen previo al procesamiento, por lo que es más rápido, y - se ahorra la energía necesaria para el almacenamiento de la imagen. Para ello, el procedimiento descrito a continuación aborda la necesidad del almacenamiento intermedio de fotografías tomadas por seguidores de estrellas (star trackers) utilizados para el apuntamiento preciso de satélites y otras plataformas automatizadas de telecomunicaciones y observación terrestre, entre otros. Como se ha indicado, el procedimiento permite procesar una imagen recibida píxel a píxel sin necesidad de almacenamiento en memoria, y ofrece como salida los centroides de las estrellas identificadas en la imagen, necesarios para el cálculo de la actitud de una plataforma de un seguidor de estrellas. El procedimiento de la invención se aplica preferentemente a un seguidor de estrellas, que comprende principalmente una cámara y una unidad de procesamiento. De manera general, en el procedimiento se toman fotografías de las estrellas que están dentro del campo de visión de la cámara del seguidor de estrellas. Cuando se realiza una fotografía, la información es transmitida píxel a píxel a la unidad de procesamiento. Usualmente, en los procedimientos del estado de la técnica, dicha información se almacena para su posterior procesamiento. Sin embargo, en el presente procedimiento se procesan los píxeles conforme llegan a la unidad de procesamiento, sin lmacenamiento intermedio (sin memorias RAM, discos duros, u otros dispositivos de memoria) . Esto supone un ahorro en complejidad y coste frente a otras invenciones. Particularmente, en el presente procedimiento se realizan dos fotografías consecutivas. En la primera, se envía la fotografía píxel a píxel desde la cámara a la unidad de procesamiento, conforme la imagen se está tomando. A continuación, se elimina el píxel si su energía es inferior a un umbral U, para evitar el fondo de la imagen. Después, se recorta el píxel si su energía es superior a un umbral R (mayor que U) adoptando el píxel dicho valor R, para evitar el impacto de píxeles degradados o defectuosos que suelen tener un brillo excesivo no real. Luego, se suma la energía de los últimos N píxeles leídos (se utiliza una ventana de tamaño arbitrario N, como por ejemplo 8) . Si la suma de esas energías es superior a un umbral Emin (superior a R) , se determina que hay una estrella en dichos píxeles, que se definen como región de interés. Conforme se detectan ventanas adyacentes, y considerando una distancia mínima Dmin de una estrella anteriormente detectada, la región de interés en la cual se considera que hay una estrella, se amplía. Finalmente, se mide la energía del píxel más brillante en dicha área de interés (Emax) . En la segunda fotografía se envía la información asimismo píxel a píxel desde la cámara a la unidad de procesamiento, conforme la imagen se está tomando. A continuación, se considera la región de interés de cada estrella detectada durante la primera fotografía. Después, se eliminan aquellos píxeles cuya energía no sea superior a un porcentaje de la suma del umbral U y Emax (esto es, umbral selectivo) . Por último, se calcula el baricentro de los píxeles restantes en la región de interés, para calcular el centroide de la estrella. Se obtiene por tanto el centroide de cada estrella detectada, eliminando el posible impacto de deformaciones de esta debido a distorsiones provocadas por la óptica, sin necesidad de guardar en memoria toda la fotografía, y acelerando el procesamiento de esta. De esta manera, este procedimiento tiene como salidas las estrellas detectadas y sus centroides calculados. DESCRIPCIÓN DE LOS DIBUJOS Para complementar la descripción que se está realizando y con objeto de ayudar a una mejor comprensión de las características de la invención, de acuerdo con un ejemplo preferente de realización práctica de la misma, se acompaña como parte integrante de dicha descripción, un juego de dibujos en donde con carácter ilustrativo y no limitativo, se ha representado lo siguiente: Figura 1.- Muestra una representación esquemática de un dispositivo de seguimiento de estrellas del estado de la técnica, que incluye una memoria. Figura 2.- Muestra una representación esquemática de una primera fotografía tomada, así como el procesamiento de una ventana de píxeles durante las primeras etapas del procedimiento. Figura 3.- Muestra un diagrama de flujo del procesamiento de la primera fotografía tomada. Figura 4.- Muestra una representación esquemática de los píxeles de la imagen con el área del centroide de la estrella resaltada. Figura 5.- Muestra un diagrama de flujo del procesamiento de la segunda fotografía tomada. REALIZACIÓN PREFERENTE DE LA INVENCIÓN Se describe a continuación, con ayuda de las figuras 1 a 5, una realización preferente del procedimiento de detección precisa de estrellas y centroides, objeto de la presente invención. Se parte de un dispositivo, como un seguidor de estrellas, que comprende una óptica (1) y una cámara (2) , que permiten tomar fotografías de estrellas, y una unidad de procesamiento (4) asociada. El dispositivo no comprende una memoria (3) intermedia, como es habitual en los dispositivos del estado de la técnica, como el representado en la figura 1. En una primera etapa del procedimiento se toman una primera fotografía (5) y una segunda fotografía. El dispositivo está estático, por lo que las dos fotografías serán idénticas. Al tomar la primera fotografía (5) , conforme la cámara (2) procesa la energía (8) de cada píxel (11) , la envía a la unidad de procesamiento (4) , píxel (11) a píxel (11) y línea (6) a línea (6) tal y como se muestra en la figura 2. En el siguiente ejemplo de realización, se va a detallar un procedimiento para el que suponemos que la energía (8) de cada píxel (11) puede tener un valor desde 0 hasta 1023, siendo 1023 el valordel píxel (11) saturado. En una segunda etapa del procedimiento se aplican las siguientes subetapas sobre la primera fotografía (5) , tal y como se representa en el diagrama de flujo de la figura 3: i) La unidad de procesamiento (4) recibe la energía (8) de un píxel (11) , y la compara con un umbral U, que tiene un valor prefijado ligeramente superior al nivel de negro de la primera fotografía (5) para evitar el ruido de esta. Preferiblemente, el umbral U tiene un valor prefijado seleccionado en el rango de 150-200. Esto es, por ejemplo, si el nivel de negro está en 100 y el ruido de negro está entre 80 y 120, el valor de U podría valer 150 para evitar errores en la detección. Por tanto, si la energía (8) recibida del píxel (11) vale menos que 150, se considera su energía (8) igual a 0. ii) Se aplica un segundo filtro al mismo píxel (11) , de tal manera que, si vale más que un valor R prefijado, su energía (8) se "recortará" a dicho valor R. Este valor R se considera para evitar la influencia de los píxeles (11) defectuosos. Dichos píxeles (11) defectuosos se detectan, por lo tanto, porque tienen un nivel de energía (8) inusualmente alto. Para dicho parámetro R se considera un valor que suele ser aproximadamente 3 o 4 veces el valor de U, en este ejemplo, 600. Por tanto, si la energía (8) del píxel (11) es superior a 600, se recortará su energía (8) a 600. Preferiblemente, el umbral R tienen un valor seleccionado en el rango de 450-800. iii) La energía (8) filtrada del píxel (11) se añade a una variable que representa la energía (8) acumulada por los píxeles (11) que forman una ventana umbralizada (10) de tamaño arbitrario. Preferiblemente, dicho tamaño debe ser al menos del doble de la estrella más pequeña observable en la cámara (2) . Preferiblemente, la ventana de filtro (7) es de un tamaño seleccionado entre 8 y 16 píxeles. Por ejemplo, si se considera que una estrella formada or 4 píxeles (11) es la más pequeña observable en una imagen (5) tomada por la cámara (2) , entonces la ventana umbralizada (10) debería ser de al menos 8 píxeles (11) consecutivos. iv) Se repiten los pasos i) a iii) para los siguientes píxeles (11) hasta completar el tamaño de una ventana de filtro (7) de tamaño N, de 8 píxeles en este caso. Si la energía (8) acumulada por los 8 píxeles (11) es superior a un umbral Emin, entonces se considera que en esos 8 píxeles (11) aparece representada la estrella, aunque todavía no se sabe exactamente dónde está su centroide. El valor del umbral Emin se selecciona arbitrariamente, pero debe ser varias veces el valor de R, porque si no varios píxeles (11) defectuosos en la misma ventana umbralizada (10) podrían dar una falsa detección. Preferiblemente, Emin tiene un valor seleccionado en el rango de 1500-3000. Por ejemplo, consideramos Emin cuatro veces el valor de R, es decir, 2400. Particularmente, en la figura 2 se muestra el procesamiento de una primera fotografía (5) que se procesa línea (6) a línea (6) , utilizando una ventana de filtro (7) de 8 píxeles (11) . Además, se representa el valor de energía (8) de cada píxel (11) de la ventana de filtro (7) . Se muestra asimismo la ventana umbralizada (9) con U, y la misma ventana recortada (10) con R. En un ejemplo concreto de realización de la invención, se supone la siguiente ventana de filtro (7) : - Los píxeles (11) al natural tienen las siguientes energías (8) : [110, 450, 760, 1023, 830, 145, 1023, 130] - Después de aplicar el filtro con U y con R, queda: [0, 450, 600, 600, 600, 0, 600, 0.- El acumulado de las energías (8) es igual a 2850 que es mayor que Emin, por lo que ahí había una estrella. En una tercera etapa del procedimiento, conforme llegan nuevos píxeles (11) , se va desplazando la ventana de filtro (7) , quitando el primer píxel (11) acumulado y añadiendo el nuevo, repitiendo los filtros d e U y R y comparando con Emin. En una cuarta etapa, conforme se detectan estrellas en la ventana, se implementan las siguientes subetapas: - Se almacena la posición X e Y d e las estrellas que se van detectando. - Si se detecta una nueva estrella, se compara su posición X e Y en la primera fotografía (5) con la X e Y de las estrellas anteriormente detectadas, y si la distancia entre ambas es menor que un parámetro Dmin, entonces se considera que forman parte de la misma estrella. Dicho parámetro Dmin se selecciona teniendo en cuenta que permitirá diferenciar dos estrellas cercanas una de la otra, preferentemente en el rango de 80-200 píxeles. Para este ejemplo se considera que dos estrellas detectadas a menos de 100 píxeles (11) una de la otra serán la misma estrella. - A la misma vez, a cada estrella que se va detectando y ampliando se le asocia su tamaño, su radio en píxeles (11) , y se medirá la energía (8) del píxel (11) más brillante (Emax) o una estimación. Por ejemplo, se aplica una ventana de filtro (7) deslizante de 4 píxeles dentro del radio de una estrella, y se calcula el promedio de los cuatro píxeles: el valor Emax será el valor promedio calculado más grande dentro de la misma estrella. Cuando se haya terminado de recibir los píxeles de la primera imagen (5) se dispondrá de la siguiente información: - La posición X e Y d e cada estrella detectada. - El radio de cada estrella detectada. - La Emax de cada estrella detectada. En la quinta etapa del procedimiento, que se muestra en el diagrama de flujo de la figura 5, se procesa la segunda fotografía, en la cual se vuelve a recorrer la imagen (5) píxel (11) a píxel (11) , realizando las siguientes subetapas: 1) La unidad de procesamiento (4) evalúa el píxel (11) recibido para saber si pertenece a alguna de las estrellas detectadas en la primera fotografía (5) . Si pertenece a la estrella se pasa al siguiente paso, si no, se pasa al siguiente píxel ( 11) . 2) Se compara la energía (8) del píxel (11) con un porcentaje de la suma del umbral U definido anteriormente más el valor Emax calculado anteriormente. Preferiblemente, se selecciona en el rango de 50-75%. Esto proporciona un nuevo umbral que estará aproximadamente entre el nivel de negro de la segunda fotografía y la energía (8) máxima de la estrella en cuestión. Si la energía (8) del píxel (11) está por debajo de este umbral, se fija su energía (8) a 0. 3) Finalmente, se considera la posición X e Y del píxel (11) junto con su energía (8) para calcular el baricentro de la estrella. 4) Se repiten los pasos 1 a 3 para cada píxel (11) recibido. Cuanto se haya terminado se habrá calculado el baricentro de cada estrella detectada habiendo aplicado un umbral selectivo que depende de la Emax de cada estrella y que ha permitido eliminar cualquier distorsión provocada por la óptica (1) de la cámara (2) , por ejemplo, la distorsión cromática entre los colores rojo verde y azul que hace que una estrella se vea como una superposición de tres estrellas de diferentes energías (8) ligeramente desplazadas unas de otras. En la figura 4 se muestra el resultado final, en el que se refleja el procesamiento de la imagen y el cálculo del centroide mediante umbral selectivo, en el que se muestra claramente la región de los píxeles (11) con energía superior al umbral selectivo (12) , y la región de todos los píxeles (11) que conforman la estrella.
Publicaciones:
ES2953758 (15/11/2023) - A1 Solicitud de patente con informe sobre el estado de la técnica
Eventos:
En fecha 01/04/2022 se realizó Registro Instancia de Solicitud
En fecha 05/04/2022 se realizó Admisión a Trámite
En fecha 05/04/2022 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 06/04/2022 se realizó Superado examen de oficio
En fecha 22/06/2022 se realizó Realizado IET
En fecha 24/06/2022 se realizó 1109P_Comunicación Traslado del IET
En fecha 15/11/2023 se realizó Publicación Solicitud
En fecha 15/11/2023 se realizó Publicación Folleto Solicitud con IET (A1)
En fecha 15/02/2024 se realizó PETEX_Petición de examen sustantivo
En fecha 01/03/2024 se realizó Validación petición y/o pago de examen sustantivo conforme
Pagos:
01/04/2022 - Pago Tasas IET
+ ES-2953758_A11.- Procedimiento de detección precisa de estrellas y centroides para un seguidor de estrellas, que comprende una cámara (2) y una unidad de procesamiento (4) , comprendiendo el procedimiento las etapas de: - toma de una primera fotografía (5) y una segunda fotografía consecutivas con la cámara (2) estática, estando las fotografías compuestas por unos píxeles (11) , tendiendo cada uno de los píxeles (11) una energía (8) característica, - recepción de la primera fotografía (5) píxel (11) a píxel (11) en la unidad de procesamiento (4) , conforme se toman las fotografías, - definición, en la primera fotografía (5) , de una ventana de filtro (7) que comprende N píxeles (11) , - aplicación, en la ventana de filtro (7) , de las siguientes subetapas: i) eliminación del píxel (11) si su energía (8) es inferior a un umbral U, ii) recorte del píxel (11) si su energía (8) es superior a un umbral R mayor que U, adoptando el píxel (11) dicho valor R, ni) suma de la energía (8) de los píxeles (11) de la ventana de filtro (7) , iv) definición de una región de interés en la ventana de filtro (7) si la suma es superior a un umbral Emin, superior a R, - desplazamiento de la ventana de filtro (7) y repetición de las etapas i) a iv) hasta que se analizan todos los píxeles (11) de la primera fotografía (5) , - unificación, en estrellas, de todas las regiones de interés separadas por una distancia inferior a Dmin en la primera fotografía (5) , - cálculo de una energía máxima Emax en las estrellas, siendo Emax la energía (8) del píxel (11) con mayor energía (8) de la estrella, - recepción de la segunda fotografía píxel (11) a píxel (11) en la unidad de procesamiento (4) , conforme se toman las fotografías, - aplicación, a cada uno de los píxeles (11) de la segunda fotografía, de las siguientes subetapas: I) eliminación del píxel (11) si su energía (8) es inferior a un porcentaje predeterminado de la suma del umbral U y Emax de la estrella a la que pertenezca el píxel (11) , II) cálculo del baricentro de la estrella a partir de la posición X e Y y la energía (8) de sus píxeles (11) , y III) cálculo del centroide de la estrella. 2.- El procedimiento de la reivindicación 1, en el que la ventana de filtro (7) es de un tamaño al menos el doble de la estrella más pequeña observable en la cámara (2) . 3.- El procedimiento de la reivindicación 1, en el que la ventana de filtro (7) es de un tamaño seleccionado en el rango de 8 y 16 píxeles. 4.- El procedimiento de la reivindicación 1, en el que umbral U tiene un valor prefijado superior al nivel de negro de la imagen (5) para evitar el ruido de esta. 5.- El procedimiento de la reivindicación 1, en el que el umbral U tiene un valor prefijado seleccionado en el rango de 150-200. 6.- El procedimiento de la reivindicación 1, en el que el umbral R tiene un valor de 3 o 4 veces el valor de U. 7.- El procedimiento de la reivindicación 1, en el que el umbral R tiene un valor seleccionado en el rango de 450-800. 8.- EI procedimiento de la reivindicación 1, en el que Emin es cuatro veces el valor de R. 9.- El procedimiento de la reivindicación 1, en el que Emin tiene un valor seleccionado en el rango de 1500-3000. 10.- El procedimiento de la reivindicación 1, en el que Dmin tiene un valor seleccionado en el rango de 80-200 píxeles. 11.- El procedimiento de la reivindicación 1, en el que el porcentaje de la suma del umbral U y Emax se seleccionad en el rango de 50-75%.
Los productos y servicios protegidos por este registro son:
G06T 7/66
Descripciones:
+ ES-2953758_A1 PROCEDIMIENTO DE DETECCIÓN PRECISA DE ESTRELLAS Y CENTROIDES OBJETO DE LA INVENCIÓN Se trata de un procedimiento de detección precisa de estrellas y centroides en recepción de imágenes sin almacenamiento en memoria, que facilita la detección y determinación de las estrellas a la vez que se recibe la imagen píxel a píxel, eliminando la necesidad de uso de una memoria intermedia o del almacenamiento de la imagen tomada (en RAM o disco duro, u otro tipo de dispositivo de memoria) . Este procedimiento es aplicable en la ingeniería espacial, para el uso en dispositivos de seguimiento de estrellas (star trackers) , utilizados para la determinación con alta precisión de la actitud u orientación de un satélite. A su vez, este procedimiento sería aplicable en seguidores de estrellas que sean utilizados en la industria militar o aeronáutica, donde su uso facilita la determinación de la orientación del vehículo, como cohetes, drones terrestres o aéreos, o aviones. ANTECEDENTES DE LA INVENCIÓN Los dispositivos de seguimiento de estrellas (star trackers) son dispositivos clave para el correcto funcionamiento de los satélites de hoy en día, tanto para comunicaciones como para observación terrestre. Éstos toman fotografías de las estrellas, las almacenan para procesarlas, detectan y determinan la posición de las estrellas en la foto, triangulan sus posiciones y comparan dicha triangulación con una información previamente almacenada en una base de datos. Buscan las estrellas que encajan con aquella triangulación y calculan el apuntamiento exacto según aquellas estrellas detectadas y sus posiciones en la fotografía. El tiempo que conlleva el procesamiento de tanta información limita en gran medida la operación y la velocidad de respuesta de los dispositivos de seguimiento de estrellas, y a la vez el procesamiento es bastante complejo, pues los requerimientos de precisión exigidos son muy altos. Las técnicas para detectar estrellas son diversas. Una primera alternativa consiste en usar un umbral de iluminación en una región de interés para detectar dónde hay una estrella. Este método está muy extendido, junto con técnicas de desenfocado. Otra técnica consiste en detectar píxeles por encima de umbrales y posteriormente evaluar los píxeles adyacentes. Estos procedimientos son extremadamente locales, de manera que fallan si algún píxel, bien dañado o bien por el ruido intrínseco, genera un valor por encima del umbral. Por otro lado, es conocido el método de cálculo del centroide. Se trata de un procedimiento sencillo pues consiste en una operación matemática aplicada sobre los píxeles que conforman la estrella. La clave está en seleccionar la región de interés necesaria que abarca los píxeles de interés. Existen otros métodos que consisten en la aplicación de plantillas de tamaño MxM en aquellos píxeles pertenecientes a la estrella, lo que implica un almacenamiento previo de la imagen tomada por la cámara, ya que para analizar el bloque completo deben haberse almacenado al menos M filas completas de píxeles, lo que requiere una gran cantidad de memoria disponible. En otras alternativas, se utiliza el Laplaciano aplicado en las fotos para detectar estrellas en situaciones de alta velocidad angular, lo que hace que las estrellas se emborronen y su energía se distribuye entre más píxeles, haciendo difícil su detección. Este método requiere el uso de ventanas cuadradas, al menos 3x3 píxeles, lo que requiere guardar en memoria la imagen previamente, ya que para analizar una matriz de 3x3 píxeles deben haberse almacenado al menos 3 filas completas de píxeles, lo que requiere una cantidad importante de memoria disponible (i.e. cámara de 2000x2000 píxeles, al menos 6000 píxeles) . Alternativamente, existe un método de umbralización por bloques para compensar los efectos variables de stray-light (luz indeseada entrando en la óptica desde ángulos extremos) . Dicha umbralización requiere guardar en memoria la imagen previamente, pues debe analizase cada bloque de píxeles por separado, cada uno de 128x128 píxeles, para calcular el umbral que debe aplicarse a cada píxel de cada bloque. En el documento de patente US8218013B1 se menciona un procedimiento para detectar estrellas mediante un procedimiento basado en medianas y promedios consecutivos aplicados por escaneo lineal. Otros documentos de patentes que expresan métodos de detección de estrellas y/o de cálculo de centroides, como las CN112348053, CN109141403, CN112200855, CN108716916, CN103591963, que hacen relación a cálculos y algoritmos aplicados a grandes cantidades de píxeles y datos, lo que requiere del almacenamiento previo de la imagen, por lo que necesitan memorias RAM, discos duros u otros dispositivos de memoria para aplicar sus procedimientos. En todos estos casos se hace necesario el almacenamiento intermedio de los datos de la imagen para su procesamiento: cálculos, sumas, divisiones, etc., de los bloques de píxeles en cuestión, ya se trate de líneas o de matrices. Esto encarece los productos, dificulta su diseño y desarrollo, y retrasa el tiempo de procesamiento. DESCRIPCIÓN DE LA INVENCIÓN El objeto de la invención es un procedimiento de detección precisa de estrellas y centroides en la recepción de imágenes sin almacenamiento en memoria. El procedimiento presenta las siguientes ventajas, respecto a los documentos del estado de la técnica: - Está basado en un sensor bidimensional que forma una matriz de píxeles, por lo que las imágenes tomadas pueden incluir decenas de estrellas y el procedimiento es capaz de procesarlas todas a la vez. Sin embargo, en los documentos del estado de la técnica solo se escanea una a una mediante el uso de un "sean mirror" y un sensor lineal (unidimensional) . - El presente procedimiento es más rápido al no requerir de ningún escaneo secuencial mediante mecanismos para cubrir todo un campo de visión bidimensional. - Los procedimientos del estado de la técnica requieren de información previa indicada por el satélite para identificar las estrellas "escaneadas", mientras que en la presente invención no es necesario disponer de información previa. - En algunos de los procedimientos del estado de la técnica se incluye la aplicación de más de seis procesos de filtrado y cálculos, siendo éstos muy omplejos (grandes ventanas y aplicación de máscaras calculadas automáticamente) y requiriendo de almacenamiento previo de datos. Sin embargo, la presente invención requiere de una menor cantidad de procesos de filtrado y sin almacenamiento de datos, por lo que es más rápido y eficiente para los mismos resultados. Se logra así la mitigación del impacto de píxeles defectuosos y radiados, y la mitigación del ruido del fondo. Por tanto, la presente invención supone una gran ventaja frente al estado de la técnica, al disponer un procedimiento con capacidad para detectar estrellas y determinar centroides conforme se reciben secuencialmente los píxeles que constituyen una imagen y sin necesidad de almacenamiento intermedio, por lo que: - no hace falta memoria (RAM u otras) por lo que es más barato y robusto frente a radiación en aplicaciones de satélites, - no se pierde tiempo en el almacenamiento de la imagen previo al procesamiento, por lo que es más rápido, y - se ahorra la energía necesaria para el almacenamiento de la imagen. Para ello, el procedimiento descrito a continuación aborda la necesidad del almacenamiento intermedio de fotografías tomadas por seguidores de estrellas (star trackers) utilizados para el apuntamiento preciso de satélites y otras plataformas automatizadas de telecomunicaciones y observación terrestre, entre otros. Como se ha indicado, el procedimiento permite procesar una imagen recibida píxel a píxel sin necesidad de almacenamiento en memoria, y ofrece como salida los centroides de las estrellas identificadas en la imagen, necesarios para el cálculo de la actitud de una plataforma de un seguidor de estrellas. El procedimiento de la invención se aplica preferentemente a un seguidor de estrellas, que comprende principalmente una cámara y una unidad de procesamiento. De manera general, en el procedimiento se toman fotografías de las estrellas que están dentro del campo de visión de la cámara del seguidor de estrellas. Cuando se realiza una fotografía, la información es transmitida píxel a píxel a la unidad de procesamiento. Usualmente, en los procedimientos del estado de la técnica, dicha información se almacena para su posterior procesamiento. Sin embargo, en el presente procedimiento se procesan los píxeles conforme llegan a la unidad de procesamiento, sin lmacenamiento intermedio (sin memorias RAM, discos duros, u otros dispositivos de memoria) . Esto supone un ahorro en complejidad y coste frente a otras invenciones. Particularmente, en el presente procedimiento se realizan dos fotografías consecutivas. En la primera, se envía la fotografía píxel a píxel desde la cámara a la unidad de procesamiento, conforme la imagen se está tomando. A continuación, se elimina el píxel si su energía es inferior a un umbral U, para evitar el fondo de la imagen. Después, se recorta el píxel si su energía es superior a un umbral R (mayor que U) adoptando el píxel dicho valor R, para evitar el impacto de píxeles degradados o defectuosos que suelen tener un brillo excesivo no real. Luego, se suma la energía de los últimos N píxeles leídos (se utiliza una ventana de tamaño arbitrario N, como por ejemplo 8) . Si la suma de esas energías es superior a un umbral Emin (superior a R) , se determina que hay una estrella en dichos píxeles, que se definen como región de interés. Conforme se detectan ventanas adyacentes, y considerando una distancia mínima Dmin de una estrella anteriormente detectada, la región de interés en la cual se considera que hay una estrella, se amplía. Finalmente, se mide la energía del píxel más brillante en dicha área de interés (Emax) . En la segunda fotografía se envía la información asimismo píxel a píxel desde la cámara a la unidad de procesamiento, conforme la imagen se está tomando. A continuación, se considera la región de interés de cada estrella detectada durante la primera fotografía. Después, se eliminan aquellos píxeles cuya energía no sea superior a un porcentaje de la suma del umbral U y Emax (esto es, umbral selectivo) . Por último, se calcula el baricentro de los píxeles restantes en la región de interés, para calcular el centroide de la estrella. Se obtiene por tanto el centroide de cada estrella detectada, eliminando el posible impacto de deformaciones de esta debido a distorsiones provocadas por la óptica, sin necesidad de guardar en memoria toda la fotografía, y acelerando el procesamiento de esta. De esta manera, este procedimiento tiene como salidas las estrellas detectadas y sus centroides calculados. DESCRIPCIÓN DE LOS DIBUJOS Para complementar la descripción que se está realizando y con objeto de ayudar a una mejor comprensión de las características de la invención, de acuerdo con un ejemplo preferente de realización práctica de la misma, se acompaña como parte integrante de dicha descripción, un juego de dibujos en donde con carácter ilustrativo y no limitativo, se ha representado lo siguiente: Figura 1.- Muestra una representación esquemática de un dispositivo de seguimiento de estrellas del estado de la técnica, que incluye una memoria. Figura 2.- Muestra una representación esquemática de una primera fotografía tomada, así como el procesamiento de una ventana de píxeles durante las primeras etapas del procedimiento. Figura 3.- Muestra un diagrama de flujo del procesamiento de la primera fotografía tomada. Figura 4.- Muestra una representación esquemática de los píxeles de la imagen con el área del centroide de la estrella resaltada. Figura 5.- Muestra un diagrama de flujo del procesamiento de la segunda fotografía tomada. REALIZACIÓN PREFERENTE DE LA INVENCIÓN Se describe a continuación, con ayuda de las figuras 1 a 5, una realización preferente del procedimiento de detección precisa de estrellas y centroides, objeto de la presente invención. Se parte de un dispositivo, como un seguidor de estrellas, que comprende una óptica (1) y una cámara (2) , que permiten tomar fotografías de estrellas, y una unidad de procesamiento (4) asociada. El dispositivo no comprende una memoria (3) intermedia, como es habitual en los dispositivos del estado de la técnica, como el representado en la figura 1. En una primera etapa del procedimiento se toman una primera fotografía (5) y una segunda fotografía. El dispositivo está estático, por lo que las dos fotografías serán idénticas. Al tomar la primera fotografía (5) , conforme la cámara (2) procesa la energía (8) de cada píxel (11) , la envía a la unidad de procesamiento (4) , píxel (11) a píxel (11) y línea (6) a línea (6) tal y como se muestra en la figura 2. En el siguiente ejemplo de realización, se va a detallar un procedimiento para el que suponemos que la energía (8) de cada píxel (11) puede tener un valor desde 0 hasta 1023, siendo 1023 el valordel píxel (11) saturado. En una segunda etapa del procedimiento se aplican las siguientes subetapas sobre la primera fotografía (5) , tal y como se representa en el diagrama de flujo de la figura 3: i) La unidad de procesamiento (4) recibe la energía (8) de un píxel (11) , y la compara con un umbral U, que tiene un valor prefijado ligeramente superior al nivel de negro de la primera fotografía (5) para evitar el ruido de esta. Preferiblemente, el umbral U tiene un valor prefijado seleccionado en el rango de 150-200. Esto es, por ejemplo, si el nivel de negro está en 100 y el ruido de negro está entre 80 y 120, el valor de U podría valer 150 para evitar errores en la detección. Por tanto, si la energía (8) recibida del píxel (11) vale menos que 150, se considera su energía (8) igual a 0. ii) Se aplica un segundo filtro al mismo píxel (11) , de tal manera que, si vale más que un valor R prefijado, su energía (8) se "recortará" a dicho valor R. Este valor R se considera para evitar la influencia de los píxeles (11) defectuosos. Dichos píxeles (11) defectuosos se detectan, por lo tanto, porque tienen un nivel de energía (8) inusualmente alto. Para dicho parámetro R se considera un valor que suele ser aproximadamente 3 o 4 veces el valor de U, en este ejemplo, 600. Por tanto, si la energía (8) del píxel (11) es superior a 600, se recortará su energía (8) a 600. Preferiblemente, el umbral R tienen un valor seleccionado en el rango de 450-800. iii) La energía (8) filtrada del píxel (11) se añade a una variable que representa la energía (8) acumulada por los píxeles (11) que forman una ventana umbralizada (10) de tamaño arbitrario. Preferiblemente, dicho tamaño debe ser al menos del doble de la estrella más pequeña observable en la cámara (2) . Preferiblemente, la ventana de filtro (7) es de un tamaño seleccionado entre 8 y 16 píxeles. Por ejemplo, si se considera que una estrella formada or 4 píxeles (11) es la más pequeña observable en una imagen (5) tomada por la cámara (2) , entonces la ventana umbralizada (10) debería ser de al menos 8 píxeles (11) consecutivos. iv) Se repiten los pasos i) a iii) para los siguientes píxeles (11) hasta completar el tamaño de una ventana de filtro (7) de tamaño N, de 8 píxeles en este caso. Si la energía (8) acumulada por los 8 píxeles (11) es superior a un umbral Emin, entonces se considera que en esos 8 píxeles (11) aparece representada la estrella, aunque todavía no se sabe exactamente dónde está su centroide. El valor del umbral Emin se selecciona arbitrariamente, pero debe ser varias veces el valor de R, porque si no varios píxeles (11) defectuosos en la misma ventana umbralizada (10) podrían dar una falsa detección. Preferiblemente, Emin tiene un valor seleccionado en el rango de 1500-3000. Por ejemplo, consideramos Emin cuatro veces el valor de R, es decir, 2400. Particularmente, en la figura 2 se muestra el procesamiento de una primera fotografía (5) que se procesa línea (6) a línea (6) , utilizando una ventana de filtro (7) de 8 píxeles (11) . Además, se representa el valor de energía (8) de cada píxel (11) de la ventana de filtro (7) . Se muestra asimismo la ventana umbralizada (9) con U, y la misma ventana recortada (10) con R. En un ejemplo concreto de realización de la invención, se supone la siguiente ventana de filtro (7) : - Los píxeles (11) al natural tienen las siguientes energías (8) : [110, 450, 760, 1023, 830, 145, 1023, 130] - Después de aplicar el filtro con U y con R, queda: [0, 450, 600, 600, 600, 0, 600, 0.- El acumulado de las energías (8) es igual a 2850 que es mayor que Emin, por lo que ahí había una estrella. En una tercera etapa del procedimiento, conforme llegan nuevos píxeles (11) , se va desplazando la ventana de filtro (7) , quitando el primer píxel (11) acumulado y añadiendo el nuevo, repitiendo los filtros d e U y R y comparando con Emin. En una cuarta etapa, conforme se detectan estrellas en la ventana, se implementan las siguientes subetapas: - Se almacena la posición X e Y d e las estrellas que se van detectando. - Si se detecta una nueva estrella, se compara su posición X e Y en la primera fotografía (5) con la X e Y de las estrellas anteriormente detectadas, y si la distancia entre ambas es menor que un parámetro Dmin, entonces se considera que forman parte de la misma estrella. Dicho parámetro Dmin se selecciona teniendo en cuenta que permitirá diferenciar dos estrellas cercanas una de la otra, preferentemente en el rango de 80-200 píxeles. Para este ejemplo se considera que dos estrellas detectadas a menos de 100 píxeles (11) una de la otra serán la misma estrella. - A la misma vez, a cada estrella que se va detectando y ampliando se le asocia su tamaño, su radio en píxeles (11) , y se medirá la energía (8) del píxel (11) más brillante (Emax) o una estimación. Por ejemplo, se aplica una ventana de filtro (7) deslizante de 4 píxeles dentro del radio de una estrella, y se calcula el promedio de los cuatro píxeles: el valor Emax será el valor promedio calculado más grande dentro de la misma estrella. Cuando se haya terminado de recibir los píxeles de la primera imagen (5) se dispondrá de la siguiente información: - La posición X e Y d e cada estrella detectada. - El radio de cada estrella detectada. - La Emax de cada estrella detectada. En la quinta etapa del procedimiento, que se muestra en el diagrama de flujo de la figura 5, se procesa la segunda fotografía, en la cual se vuelve a recorrer la imagen (5) píxel (11) a píxel (11) , realizando las siguientes subetapas: 1) La unidad de procesamiento (4) evalúa el píxel (11) recibido para saber si pertenece a alguna de las estrellas detectadas en la primera fotografía (5) . Si pertenece a la estrella se pasa al siguiente paso, si no, se pasa al siguiente píxel ( 11) . 2) Se compara la energía (8) del píxel (11) con un porcentaje de la suma del umbral U definido anteriormente más el valor Emax calculado anteriormente. Preferiblemente, se selecciona en el rango de 50-75%. Esto proporciona un nuevo umbral que estará aproximadamente entre el nivel de negro de la segunda fotografía y la energía (8) máxima de la estrella en cuestión. Si la energía (8) del píxel (11) está por debajo de este umbral, se fija su energía (8) a 0. 3) Finalmente, se considera la posición X e Y del píxel (11) junto con su energía (8) para calcular el baricentro de la estrella. 4) Se repiten los pasos 1 a 3 para cada píxel (11) recibido. Cuanto se haya terminado se habrá calculado el baricentro de cada estrella detectada habiendo aplicado un umbral selectivo que depende de la Emax de cada estrella y que ha permitido eliminar cualquier distorsión provocada por la óptica (1) de la cámara (2) , por ejemplo, la distorsión cromática entre los colores rojo verde y azul que hace que una estrella se vea como una superposición de tres estrellas de diferentes energías (8) ligeramente desplazadas unas de otras. En la figura 4 se muestra el resultado final, en el que se refleja el procesamiento de la imagen y el cálculo del centroide mediante umbral selectivo, en el que se muestra claramente la región de los píxeles (11) con energía superior al umbral selectivo (12) , y la región de todos los píxeles (11) que conforman la estrella.
Publicaciones:
ES2953758 (15/11/2023) - A1 Solicitud de patente con informe sobre el estado de la técnica
Eventos:
En fecha 01/04/2022 se realizó Registro Instancia de Solicitud
En fecha 05/04/2022 se realizó Admisión a Trámite
En fecha 05/04/2022 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 06/04/2022 se realizó Superado examen de oficio
En fecha 22/06/2022 se realizó Realizado IET
En fecha 24/06/2022 se realizó 1109P_Comunicación Traslado del IET
En fecha 15/11/2023 se realizó Publicación Solicitud
En fecha 15/11/2023 se realizó Publicación Folleto Solicitud con IET (A1)
En fecha 15/02/2024 se realizó PETEX_Petición de examen sustantivo
En fecha 01/03/2024 se realizó Validación petición y/o pago de examen sustantivo conforme
Pagos:
01/04/2022 - Pago Tasas IET
Fuente de la información
Parte de la información aquí publicada es pública puesto que ha sido obtenida de la Oficina de Propiedad Industrial de los diferentes países el 29/04/2024 y por lo tanto puede ser que la información no esté actualizada.Parte de la información aquí mostrada ha sido calculada por nuestro sistema informático y puede no ser veraz.
Privacidad
Si considera que al información aquí publicada afecta a su privacidad y desea que eliminemos la información aquí publicada envíe un email a info@patentes-y-marcas.com o rellene el formulario que encontrará aquí.Información sobre el registro de patente nacional por PROCEDIMIENTO DE DETECCIÓN PRECISA DE ESTRELLAS Y CENTROIDES con el número P202230299
El registro de patente nacional por PROCEDIMIENTO DE DETECCIÓN PRECISA DE ESTRELLAS Y CENTROIDES con el número P202230299 fue solicitada el 01/04/2022. Se trata de un registro en España por lo que este registro no ofrece protección en el resto de países. El registro PROCEDIMIENTO DE DETECCIÓN PRECISA DE ESTRELLAS Y CENTROIDES con el número P202230299 fue solicitada por UNIVERSIDAD DE SEVILLA mediante los servicios del agente Ángel Pons Ariño. El registro [modality] por PROCEDIMIENTO DE DETECCIÓN PRECISA DE ESTRELLAS Y CENTROIDES con el número P202230299 está clasificado como G06T 7/66 según la clasificación internacional de patentes.
Otras invenciones solicitadas en la clasificación internacional de patentes G06T 7/66.
Es posible conocer invenciones similares al campo de la técnica se refiere. El registro de patente nacional por PROCEDIMIENTO DE DETECCIÓN PRECISA DE ESTRELLAS Y CENTROIDES con el número P202230299 está clasificado con la clasificación G06T 7/66 por lo que si se desea conocer más registros con la clasificación G06T 7/66 clicar aquí.Otras invenciones solicitadas a través del representante ÁNGEL PONS ARIÑO
Es posible conocer todas las invenciones solicitadas a través del agente ÁNGEL PONS ARIÑO entre las que se encuentra el registro patente nacional por PROCEDIMIENTO DE DETECCIÓN PRECISA DE ESTRELLAS Y CENTROIDES con el número P202230299. Si se desean conocer más invenciones solicitadas a través del agente ÁNGEL PONS ARIÑO clicar aquí.Patentes en España
Es posible conocer todas las invenciones publicadas en España entre las que se encuentra el registro patente nacional por PROCEDIMIENTO DE DETECCIÓN PRECISA DE ESTRELLAS Y CENTROIDES. Nuestro portal www.patentes-y-marcas.com ofrece acceso a las publicaciones de patentes en España. Conocer las patentes registradas en un país es importante para saber las posibilidades de fabricar, vender o explotar una invención en España.Patentes registradas en la clase G
Es posible conocer todas las patentes registradas en la clase G (FISICA) entre las que se encuentra la patente PROCEDIMIENTO DE DETECCIÓN PRECISA DE ESTRELLAS Y CENTROIDES con el número P202230299. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase G06
Es posible conocer todas las patentes registradas en la clase G06 (COMPUTO; CALCULO; CONTEO) entre las que se encuentra la patente PROCEDIMIENTO DE DETECCIÓN PRECISA DE ESTRELLAS Y CENTROIDES con el número P202230299. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase G06T
Es posible conocer todas las patentes registradas en la clase G06T (TRATAMIENTO O GENERACIÓN DE DATOS DE IMAGEN, EN GENERAL ) entre las que se encuentra la patente PROCEDIMIENTO DE DETECCIÓN PRECISA DE ESTRELLAS Y CENTROIDES con el número P202230299. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.
¿Tienes alguna duda?
Escribe tu consulta y te responderemos rápida y gratuitamente.

Otras patentes similares

 P202230298
P202230298 P202230300
P202230300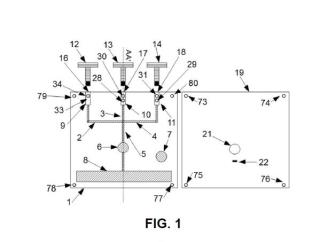
Profesionales Recomendados
Barcelona
933182440
España
933182440
España

Barcelona
+34 93 362 16 97
España
+34 93 362 16 97
España

Barcelona
932 593 600
España
932 593 600
España







