


- Home /
- Publicaciones de patentes /
- Método y sistema mejorados para la evaluación de la calidad de carne mediante imágenes hiperespectrales
Patente nacional por "Método y sistema mejorados para la evaluación de la calidad de carne mediante imágenes hiperespectrales"
Este registro ha sido solicitado por
AMBLING INGENIERIA Y SERVICIOS, S.L.
a través del representanteGUSTAVO ADOLFO GONZÁLEZ PECES
Contacto
- Estado: Solicitud retirada
- País:
- España
- Fecha solicitud:
- 02/06/2022
- Número solicitud:
-
P202230474
- Número publicación:
-
ES2957224
- Fecha de concesión:
-
- Inventores:
-
Persona física
- Datos del titular:
-
AMBLING INGENIERIA Y SERVICIOS, S.L.
- Datos del representante:
-
Gustavo Adolfo González Peces
- Clasificación Internacional de Patentes:
- G01N 21/84,G01N 21/25,G06F 18/20
- Clasificación Internacional de Patentes de la publicación:
- G01N 21/84,G01N 21/25,G06F 18/20
- Fecha de vencimiento:
Quiero registrar una patente

Reivindicaciones:
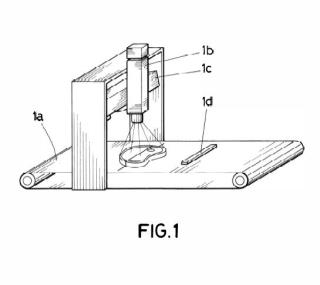
+ ES-2957224_A11. Método para la determinación de características de carne, que comprende los siguientes pasos: a1) Capturar con una cámara fija, usando una primera fuente de luz artificial, al menos una primera imagen hiperespectral de una pieza de carne, situada debajo de la primera fuente de luz artificial; y/o a2) Capturar con la cámara fija, usando una segunda fuente de luz artificial y una lente microscópica, al menos una segunda imagen hiperespectral de una muestra de la pieza de carne, estando la muestra situada encima de la segunda fuente de luz artificial; donde el método comprende además los siguientes pasos realizados por al menos un equipo electrónico de procesamiento: b) Si se ha realizado el paso a1) : b1) Recibir los datos de la al menos una imagen primera hiperespectral y a partir de ellos, seleccionar automáticamente aquellos píxeles pertenecientes a la imagen de la pieza de carne, aplicando un algoritmo de clasificación; b2) Para determinar la presencia de cuerpo extraños, comparar los datos obtenidos de la al menos una primera imagen hiperespectral para cada uno de los píxeles seleccionados en b1) y para cada longitud de onda del rango, con una firma espectral preestablecida para cada tipo de cuerpo extraño, donde la firma espectral de cada tipo de cuerpo extraño comprende un vector con el valor de reflectancia, para cada longitud de onda del rango, obtenido durante un proceso de entrenamiento previo, que corresponde a la presencia en carne de dicho tipo de cuerpo extraño; a partir de dicha comparación, determinar en cada uno de los pixeles seleccionados, si existe la presencia de un cuerpo extraño y el tipo de cuerpo extraño presente; b3) Para determinar uno o más parámetros y/o compuestos químicos, comparar los datos obtenidos de la al menos una primera imagen hiperespectral para cada uno de los píxeles seleccionados en b1) y para cada longitud de onda del rango, con una irma espectral preestablecida que corresponde a dicho parámetro o compuesto químico, donde la firma espectral de cada característica comprende un vector con el valor de reflectancia, para cada longitud de onda del rango, obtenido durante un proceso de entrenamiento previo, que corresponde a la presencia de dicho parámetro o compuesto químico en carne; a partir de dicha comparación, determinar la cantidad de cada uno de los parámetros y/o compuestos químicos en la pieza de carne en cada uno de los pixeles seleccionados. c) Si se ha realizado el paso a2) : c1) Recibir los datos de la al menos una segunda imagen hiperespectral y a partir de ellos, seleccionar automáticamente aquellos píxeles pertenecientes a la imagen de la muestra de carne, aplicando un algoritmo de clasificación; c2) Para determinar la presencia de microorganismos, comparar los datos obtenidos de la al menos una segunda imagen hiperespectral para cada uno de los píxeles seleccionados en c1) y para cada longitud de onda del rango, con una firma espectral preestablecida para cada tipo de microorganismo, donde la firma espectral de cada tipo de microorganismo comprende un vector con el valor de transmitancia, para cada longitud de onda del rango, obtenido durante un proceso de entrenamiento previo, que corresponde a la presencia en carne de dicho tipo de microorganismo; a partir de dicha comparación, determinar en cada uno de los pixeles seleccionados, si existe la presencia de un microorganismo y el tipo de microorganismo. 2. Método de acuerdo a una cualquiera de las reivindicaciones anteriores donde los parámetros y/o compuestos químicos comprenden uno o más de las siguientes: pH, humedad, color instrumental, grasa, perfil de ácidos grasos C14, C16, C17, C18 o C20, atocoferol y p-Y-tocoferoles. 3. Método de acuerdo a una cualquiera de las reivindicaciones anteriores donde los tipos de cuerpos extraños comprenden uno o más de las siguientes: ternilla, absceso, hueso, tendón, suciedad ruminal, carne encallada, coagulo, pelo, piel, callo, etiqueta y costilla. 4. Método de acuerdo a una cualquiera de las reivindicaciones anteriores donde los tipos de icroorganismos comprenden uno o más de las siguientes: Escherichia coli, Pseudomonas spp., Listeria monocytogenes, Enterobacter Cloacae, Salmonella, Staphylococcus Aureus o Lactobacillus. 5. Método de acuerdo a cualquiera de las reivindicaciones anteriores que, además comprende: - realizar una reconstrucción en el espectro visible, de la imagen de la pieza de carne; - para cada tipo de cuerpo extraño determinado en b2) , representar cada pixel seleccionado de la imagen en un color dependiendo de si se ha detectado dicho tipo de cuerpo extraño en el pixel; y/o - para cada parámetro y compuesto determinado en b3) , representar cada pixel seleccionado de la imagen en un color dependiendo de la cantidad de dicho parámetro o compuesto para cada pixel; y/o - para cada tipo de microorganismo determinado en c2) , representar cada pixel seleccionado de la imagen en un color dependiendo de si se ha detectado dicho tipo de cuerpo extraño en el pixel. 6. Método de acuerdo a cualquiera de las reivindicaciones anteriores donde las primera y segunda fuente de luz artificial, comprenden una o más lámparas halógenas de 35W de potencia con reflector dicroico. 7. Método de acuerdo a cualquiera de las reivindicaciones anteriores donde la primera fuente de luz artificial comprende varias lámparas halógenas de 35W de potencia con reflector dicroico de geometría semiesférica alineadas respecto a la horizontal, con un ángulo de inclinación respecto a la vertical de 30°. 8. Método de acuerdo a cualquiera de las reivindicaciones anteriores donde la segunda fuente de luz artificial comprende una fibra óptica configurada para iluminar la muestra de carne desde abajo. 9. Método de acuerdo a cualquiera de las reivindicaciones anteriores donde la muestra de carne se selecciona dentro de la pieza de carne dependiendo de los resultados obtenidos en b2) y b3) . 10. Método de acuerdo a cualquiera de las reivindicaciones anteriores donde la cámara está colocada de manera fija por encima de una cinta transportadora y la pieza de carne o la muestra de carne de la que la cámara captura la imagen, pasa por debajo de la cámara fija movida por la cinta transportadora. 11. Método de acuerdo a cualquiera de las reivindicaciones anteriores donde el rango del espectro en el que se recogen datos de la imagen hiperespectral es un rango de longitudes de onda entre 400 y 1000 nm. 12. Método de acuerdo a cualquiera de las reivindicaciones anteriores donde la selección de los pixeles se realiza mediante métodos de aprendizaje automáticos. 13. Método de acuerdo a cualquiera de las reivindicaciones anteriores donde el al menos un equipo electrónico y la cámara están separados y comunicados a través de una red de comunicación, y el al menos un equipo electrónico recibe los datos de las imágenes hiperespectrales capturadas, a través de la red de comunicación. 14. Sistema para la determinación de características de carne, que comprende: - Una cámara fija configurada para: - usando una primera fuente de luz artificial, capturar al menos una primera imagen hiperespectral de una pieza de carne, situada debajo de la primera fuente de luz artificial; y - usando una segunda fuente de luz artificial y una lente microscópica, capturar al menos una segunda imagen hiperespectral de una muestra de la pieza de carne, situada encima de la segunda fuente de luz artificial; - Al menos un equipo electrónico de procesamiento configurado para: - Aplicando un algoritmo de clasificación, a partir de los datos de la al menos una primera imagen hiperespectral, seleccionar automáticamente aquellos píxeles pertenecientes a la imagen de la pieza de carne y a partir de los datos de la al menos una segunda imagen hiperespectral, seleccionar automáticamente aquellos píxeles pertenecientes a la imagen de la muestra de carne; - Para determinar la presencia de cuerpos extraños, comparar los datos obtenidos de la al menos una primera imagen hiperespectral para cada uno de los píxeles seleccionados para cada longitud de onda del rango, con una firma espectral preestablecida para cada tipo de cuerpo extraño, donde la firma espectral de cada tipo de cuerpo extraño comprende un vector con el valor de reflectancia, para cada longitud de onda del rango, obtenido durante un proceso de entrenamiento previo, que corresponde a la presencia en carne de dicho tipo de cuerpo extraño; a partir de dicha comparación, determinar en cada uno de los pixeles seleccionados, si existe la presencia de un cuerpo extraño y el tipo de cuerpo extraño presente; - Para determinar parámetros y/o compuestos químicos, comparar los datos obtenidos de la al menos una primera imagen hiperespectral para cada uno de los píxeles seleccionados para cada longitud de onda del rango, con una firma espectral preestablecida que corresponde a dicho parámetro o compuesto químico, donde la firma espectral de cada característica comprende un vector con el valor de reflectancia, para cada longitud de onda del rango, obtenido durante un proceso de entrenamiento previo, que corresponde a la presencia de dicho parámetro o compuesto químico en carne; a partir de dicha comparación, determinar la cantidad de cada uno de los parámetros y/o compuestos químicos del grupo en la pieza de carne en cada uno de los pixeles seleccionados; - Para determinar la presencia de microorganismos, comparar los datos obtenidos de la al menos una segunda imagen hiperespectral para cada uno de los píxeles seleccionados para cada longitud de onda del rango, con una firma espectral preestablecida para cada tipo de microorganismo, donde la firma espectral de cada tipo de microorganismo comprende un vector con el valor de transmitancia, para cada longitud de onda del rango, obtenido durante un proceso de entrenamiento previo, que corresponde a la presencia en carne de dicho tipo de microorganismo; a partir de dicha comparación, determinar en cada uno de los pixeles seleccionados, si existe la presencia de un microorganismo y el tipo de microorganismo. 15. Programa de ordenador que comprende instrucciones ejecutables por ordenador para implementar el método según cualquiera de las reivindicaciones 1-13, al ejecutarse en un ordenador, un procesador digital de la señal, un circuito integrado específico de la aplicación, un microprocesador, un microcontrolador o cualquier otra forma de hardware programable.
Los productos y servicios protegidos por este registro son:
G01N 21/84 - G01N 21/25 - G06F 18/20
Descripciones:
+ ES-2957224_A1 Método y sistema mejorados para la evaluación de la calidad de carne mediante imágenes hiperespectrales CAMPO TÉCNICO DE LA INVENCIÓN La presente invención se refiere al campo de la monitorización de productos de la industria cárnica y más concretamente, a un método y sistema mejorados para la determinación de ciertas características de la carne (que permiten determinar su calidad) mediante captura, procesado y análisis de imágenes hiperespectrales. Esta determinación de características comprende, por ejemplo, la determinación cuantitativa de diversos parámetros o compuestos químicos de interés de la carne, detección de cuerpos extraños o detección de contaminantes microbianos. ANTECEDENTES DE LA INVENCIÓN El sector ganadero es uno de los que más está evolucionando. En lugar de pequeños productores, el comercio pasa a través de intermediarios que comercializan la carne a gran escala. Así, cooperativas ganaderas y otros grandes productores se enfrentan al gran reto de evaluar una gran cantidad de producción cárnica para cumplir, no solo las altas exigencias a nivel legislativo, sino también los altos estándares de calidad impuestos por los consumidores y por la alta competencia en el sector. Ello implica que hay que realizar diversas tareas de monitorización/evaluación de la carne a comercializar, de la manera más rápida, eficiente y precisa posible. Por ejemplo, por un lado, hay que analizar la composición química de las muestras de carne. Estos análisis son necesarios para conocer el estado de la carne desde un punto de vista nutricional y, al mismo tiempo, controlar el régimen de alimentación de los animales. También es necesario el análisis de posibles enfermedades zoonóticas, ya que estas enfermedades se pueden transmitir entre animales y seres humanos, por lo que su control estricto es imprescindible para la comercialización de carne de calidad. Estos análisis se realizan en laboratorios especializados que pueden ser de la propia empresa cárnica (si la empresa es suficientemente grande) o laboratorios externos a los que la empresa contrata estos ervicios, lo que conlleva un incremento del coste económico y en tiempo de la producción (Independientemente de quién se haga cargo de estos análisis, los tiempos necesarios para llevarlos a cabo son altos) . Además, como los análisis tradicionales son destructivos (es decir, la pieza de carne que se analiza no se puede después comercializar) , no es posible analizar el cien por cien de la producción, por lo que se realiza solamente en muestras representativas de cada lote. Por otra parte, los procesos de recogida, embolsado, etiquetado, transporte, así como el trabajo del personal especializado, no hacen más que añadir tiempo y coste a los análisis. Adicionalmente, el sector se enfrenta también a la posible presencia de cuerpos extraños en las muestras procesadas. Según su procedencia, se diferencian los inherentes del propio animal como pelos, suciedad ruminal, ternillas, huesos, entre otros; y también otros procedentes de la misma industria, como restos de guantes, etiquetas, cuerdas, etc. Como muchos de estos elementos son transparentes o tienen el mismo aspecto que la carne, muchas veces no es posible su detección mediante inspección visual de un operario o con cámaras tradicionales. A pesar del esfuerzo que realizan las empresas para evitar la presencia de estos componentes indeseables, muchos de ellos continúan en la carne hasta llegar al consumidor. En la actualidad, existen soluciones para la inspección de la calidad en la industria alimentaria basadas en técnicas ópticas. Dentro de éstas, los métodos espectroscópicos se caracterizan por una gran versatilidad. La medida de la interacción de la radiación electromagnética con la materia y la huella espectral que esta medida produce, ofrece una amplia gama de posibilidades para el análisis cualitativo y cuantitativo. La señal medida por esta tecnología no es absoluta, sino que son necesarias tareas de calibrado para establecer las relaciones que existen entre los parámetros que se quieren analizar y la información que proveen las técnicas ópticas. Para ello, se utiliza la quimiometría, que aúna la química, la espectroscopía y la estadística multivariante. La mejora en la instrumentación y los avances en la computación de gran cantidad de datos en tiempo real han permitido el desarrollo del análisis de imágenes hiperespectrales (HSI, del inglés "Hyperspectral Imaging") . Esta técnica une el análisis de imagen convencional y la espectroscopía. Una cámara hiperespectral adquiere imágenes hiperespectrales o hipercubos, estos hipercubos están formados por una batería de imágenes de una misma escena donde cada una representa numéricamente la reflectancia a una única longitud de onda, por lo que se puede conocer el perfil espectral de cualquiera de los puntos que componen dicha imagen. Así, se puede decir que los datos almacenados de imágenes espectrales tienen tres dimensiones, dos de ellas espaciales (x, y) y una espectral (la longitud de onda, A) . O, dicho de otra manera, se puede obtener el espectro completo de todos los puntos que contiene una imagen. La manera de adquirir una imagen tridimensional con el detector matricial de una cámara (bidimensional) es mediante un barrido de la muestra. Por ejemplo, con ayuda de la óptica adecuada y con un elemento dispersivo de la radiación, la cámara adquiere en cada instante una dimensión espacial (x) y la dimensión espectral (A) ; la dimensión espacial restante (y) se recopila haciendo un barrido sobre la muestra. En entornos industriales se pueden realizar las medidas sobre las cintas transportadoras que mueven la carne dentro de la cadena industrial. El movimiento que realizan las muestras en esta cinta satisface el movimiento necesario para hacer dicho barrido. La región del espectro utilizada no tiene por qué restringirse a la parte visible, sino que puede abarcar otras regiones, como, por ejemplo, aquellas que comprenden la zona del infrarrojo cercano (NIR, de las siglas en inglés de "Near InfraRed") , pudiendo diferenciar así componentes con composición química diferente incluso cuando su apariencia los hace indistinguibles. Una de las ventajas de las técnicas hiperespectrales radica en que se puede obtener el resultado del análisis en cada punto de la imagen y permite la creación de mapas donde se muestra en escalas de color la presencia o concentración de una determinada propiedad. Esta manera de exponer los resultados se conoce como "Chemical Imaging". Para el análisis químico de las muestras de carne no existen en la actualidad soluciones comerciales más allá del muestreo y posterior análisis químico convencional en laboratorios. Estos análisis están basados en métodos cromatográficos generalmente, que requieren largas y tediosas operaciones como muestreo, acondicionamiento de la muestra, extracción de compuestos, redisolución de componentes, separación cromatográfica, detección y cuantificación con bases de datos creadas para este fin. Todo ello implica también el uso de reactivos que generan residuos que hay que gestionar, repercutiendo en el coste. Los laboratorios microbiológicos son los que realizan el muestreo y el análisis de posibles gentes patógenos que produzcan enfermedades zoonóticas. A pequeña escala existen soluciones comerciales que pueden utilizarse por personal no especializado, aunque en cualquier caso son necesarios los procesos de muestreo y los análisis necesitan tiempos de incubación más o menos largos. Existen kits comerciales como RapidChek® SELECTTM, QFast® Salmonella, Reveal 2.0, MDS Salmonella 2 (3M) o PRImeDETECTTM. Son métodos que, a través de pequeñas placas de cultivo o tiras reactivas responden a la presencia de microorganismos dando un positivo en su caso. Su precisión es muy alta pero no son métodos automatizables y en ningún caso puede abarcar el análisis completo de la producción. A la vista de los retos a los que se enfrenta el sector, las pocas soluciones existentes y los problemas que presentan esas soluciones (como los mencionados en los párrafos anteriores) se observa la necesidad del desarrollo de un procedimiento rápido, efectivo, automatizable y preciso para realizar una determinación de las características de la carne (para evaluar su calidad y si cumple los requisitos exigidos) . Las técnicas de imagen y, en concreto, las hiperespectrales, han revolucionado la manera de evaluar la calidad en el sector alimentario (entre otras razones porque suponen procedimientos rápidos, nodestructivos y libres de reactivos químicos) , pero aún no se han desarrollado suficientemente para satisfacer estos problemas más allá de estudios pequeños a escala de laboratorio y no existen soluciones integrales óptimas para el análisis en el sector cárnico. SUMARIO DE LA INVENCIÓN La presente invención propone un procedimiento y sistema mejorados, basados en la tecnología de imágenes hiperespectrales, para la evaluación de la calidad de la carne, mediante la determinación (medida) de características de la misma; en concreto, el procedimiento y sistema propuestos permite determinar la concentración de diversos parámetros o compuestos presentes en la carne, detectar la presencia de cuerpos extraños en carne o detectar la infección por microorganismos (E.coli, S. aureus, Salmonella spp, Pseudomonas spp, Listeria, Enterobacter, Lactobacillus spp, entre otros) . Este procedimiento incluye la metodología para la captura óptima de las imágenes hiperespectales de la carne, el procesado de las imágenes y la obtención de resultados analíticos. También permite la creación de imágenes donde se muestran los resultados de nálisis cuantitativos y/u otra información de manera gráfica en mapas de color, para ayudar a la interpretación de los resultados. La obtención de las características de la carne se realizará a partir de la generación de firmas espectrales (que pueden incluir longitudes de onda fuera del intervalo visible del espectro) , extrayendo y definiendo aquellas firmas (patrones) espectrales que estén relacionadas con las diferentes características. A partir de un proceso de entrenamiento mediante aprendizaje automático, se han establecido las relaciones entre el perfil espectral y estas características. En el caso de la detección de microorganismos, se usa una lente microscópica que permite llevar a cabo dichos análisis. Para la detección de cuerpos extraños se podría usar también una lente microscópica (para cuerpos muy pequeños) , pero normalmente se usa una lente normal (macroscópica) para poder detectar cuerpos extraños en toda la pieza. Para ello, en el caso de detección de microrganismos, se ha entrenado el modelo de aprendizaje automático con una batería de muestras sanas y otra de muestras contaminadas de diferentes zonas de muestreo dentro del animal para conocer aquellas longitudes de onda implicadas en la detección, así como el peso de cada una de las variables en dicha detección. En el caso del análisis químico (para determinar cuantitativamente diversos parámetros y compuestos químicos) , el entrenamiento se ha realizado con un gran número de muestras con diferentes concentraciones de analito. De manera análoga, se han usado muestras que pertenecen a diferentes zonas de muestreo dentro de las piezas de carnes analizadas para hacerlo robusto. Por último y para la detección de cuerpos extraños, se ha recopilado una colección de muestras cuya presencia de estos cuerpos era conocida. Se han estudiado estos cuerpos desde un punto de vista espectroscópico y se ha entrenado un modelo de detección con el mismo fundamento matemático que el de los microorganismos. En todos estos casos, se han separado las muestras en dos sets en proporción 3:1 (esto es solo un ejemplo no limitativo y otras proporciones son posibles) . El set con mayor número de muestras se ha utilizado para realizar el entrenamiento y el set más pequeño se ha utilizado para realizar una validación externa. A partir de las firmas (patrones) espectrales definidas para cada característica, se estimarán las distintas características de la pieza de carne mediante la captura, procesado y análisis e imágenes espectrales de dicha pieza de carne. La monitorización (determinación/estimación de características) mediante el empleo de imágenes hiperespectrales permite la evaluación de la calidad de la carne de manera objetiva, con precisión y de manera rápida sin necesidad de manipulación de la carne (para el caso de detección de cuerpos extraños y análisis químico) . En una realización de la presente invención se utiliza el intervalo espectral más común en este tipo de instrumentación. Éste comprende el intervalo visible desde 400 nanómetros y alcanza el infrarrojo cercano hasta los 1000 nm. Este intervalo es muy útil, ya que es capaz de detectar los cambios en compuestos que afectan a la región visible, pero al mismo tiempo es capaz de considerar otros cambios que no tienen por qué repercutir en la apariencia de la pieza de carne. Esto es solo un ejemplo y en general se puede usar cualquier intervalo de longitudes de onda, preferiblemente abarcando parte del espectro no visible. Además, el procedimiento se realizará de manera automática. Es decir, el sistema propuesto capturará las imágenes de la pieza de carne, las procesará, determinará a partir de ellas las distintas características de la carne y almacenará los resultados y/o los presentará al usuario, por ejemplo, enviándolo a un dispositivo electrónico (por ejemplo, un móvil o tableta del usuario) o a través de un interfaz de usuario del propio sistema (por ejemplo, una pantalla) . Por lo que todo el procedimiento se realiza, sin requerir formación específica del usuario ni conocimiento de la tecnología que se aplica. Además, el procedimiento y sistema propuesto se puede usar en entornos industriales sin necesitar más modificaciones, añadiendo al sector una solución para estos problemas de índoles analíticas, higiénicas y sanitarias. Concretamente, la solución propuesta conlleva, entre otras, las siguientes ventajas: Evaluación de la calidad de la carne en tiempo real. Análisis no destructivo de las muestras. Análisis de componentes analíticos. Detección, identificación y cuantificación de microorganismos patógenos. Detección de cuerpos extraños. Reducción de costes y tiempos frente a la metodología tradicional. Y todo esto de manera automática, rápida y sencilla, y mejorando la exactitud, calidad, rapidez, seguridad, fiabilidad y costes en los procesos. En un primer aspecto, la presente invención propone un método para la determinación de características de carne (las características a determinar pueden comprender la presencia de cuerpos extraños y microorganismos patógenos de distintos tipos y la determinación de la cantidad de un grupo de parámetros y/o compuestos químicos) , donde el método comprende los siguientes pasos: a1) Capturar con una cámara fija, usando una primera fuente de luz artificial, al menos una primera imagen hiperespectral de una pieza de carne, situada debajo de la primera fuente de luz artificial (donde la cámara está situada encima de la pieza de carne y donde en dicha al menos una primera imagen hiperespectral, se obtienen datos de reflectancia de los píxeles de la imagen a distintas longitudes de onda de un rango del espectro) ; y/o a2) Capturar con la cámara fija, usando una segunda fuente de luz artificial y una lente microscópica (una lente de aumento) , al menos una segunda imagen hiperespectral de una muestra de la pieza de carne, estando la muestra situada encima de la segunda fuente de luz artificial (y donde en dicha al menos una segunda imagen hiperespectral, se obtienen datos de transmitancia de los píxeles de la imagen a distintas longitudes de onda de un rango del espectro; se le llama a ésta segunda imagen hiperespectral para distinguirla de la obtenida en a1) sin usar lente microscópica, pero no quiere decir que esta imagen de la muestra con lente microscópica se obtenga necesariamente después de la obtenida para la pieza de carne) ; donde el método comprende además los siguientes pasos realizados por al menos un equipo electrónico de procesamiento: b) Si se ha realizado el paso a1 (es decir, se ha capturado la primera imagen hiperespectral de la pieza de carne) : b1) Recibir los datos de la al menos una imagen primera hiperespectral y a partir de ellos, seleccionar automáticamente aquellos píxeles pertenecientes a la imagen de la pieza de carne, aplicando un algoritmo de clasificación; b2) Para determinar la presencia de cuerpo extraños, comparar los datos obtenidos de la al menos una primera imagen hiperespectral para cada uno de los píxeles seleccionados en b1) y para cada longitud de onda del rango, con una firma espectral preestablecida para cada tipo de cuerpo extraño, donde la firma espectral de cada tipo de cuerpo extraño comprende un vector con el valor de reflectancia, para cada longitud de onda del rango, obtenido durante un proceso de entrenamiento previo, que corresponde a la presencia en carne de dicho tipo de cuerpo extraño; a partir de dicha comparación, determinar en cada uno de los pixeles seleccionados, si existe la presencia de un cuerpo extraño y el tipo de cuerpo extraño presente; b3) Para determinar uno o más parámetros (físico o químicos) y/o compuestos químicos, comparar los datos obtenidos de la al menos una primera imagen hiperespectral para cada uno de los píxeles seleccionados en b1) y para cada longitud de onda del rango, con una firma espectral preestablecida que corresponde a dicho parámetro o compuesto químico, donde la firma espectral de cada característica comprende un vector con el valor de reflectancia, para cada longitud de onda del rango, obtenido durante un proceso de entrenamiento previo, que corresponde a la presencia de (una unidad de) dicho parámetro o compuesto químico en carne; a partir de dicha comparación, determinar la cantidad de cada uno de los parámetros y/o compuestos químicos en la pieza de carne en cada uno de los pixeles seleccionados. c) Si se ha realizado el paso a2) (es decir, se ha capturado la segunda imagen hiperespectral de la muestra de carne) : c1) Recibir los datos de al menos una segunda imagen hiperespectral y a partir de ellos, seleccionar automáticamente aquellos píxeles pertenecientes a la imagen de la muestra de carne, aplicando un algoritmo de clasificación; c2) Para determinar la presencia de microorganismos (patógenos) , comparar los datos obtenidos de al menos una segunda imagen hiperespectral para cada uno de los píxeles seleccionados en c1) y para cada longitud de onda del rango, con una firma espectral preestablecida para cada tipo de microorganismo, donde la firma espectral de cada tipo de microorganismo comprende un vector con el valor de ransmitancia, para cada longitud de onda del rango, obtenido durante un proceso de entrenamiento previo, que corresponde a la presencia en carne de dicho tipo de microorganismo; a partir de dicha comparación, determinar en cada uno de los pixeles seleccionados, si existe la presencia de un microorganismo y el tipo de microorganismo. Los parámetros (físico-químicos) y/o compuestos químicos pueden comprender uno o más de las siguientes: pH, humedad, color instrumental, grasa, perfil de ácidos grasos C14, C16, C17, C18 o C20, a-tocoferol y p-Y-tocoferoles. Los tipos de cuerpos extraños pueden comprender uno o más de las siguientes: ternilla, absceso, hueso, tendón, suciedad ruminal, carne encallada, coagulo, pelo, piel, callo, etiqueta y costilla. Los tipos de microorganismos pueden comprender uno o más de las siguientes: Escherichia coli, Pseudomonas spp., Listeria monocytogenes, Enterobacter Cloacae, Salmonella, Staphylococcus Aureus o Lactobacillus. En una realización el método además comprende: - realizar una reconstrucción en el espectro visible, de la imagen de la pieza de carne; - para cada tipo de cuerpo extraño determinado en b2) , representar cada pixel seleccionado de la imagen en un color dependiendo de si se ha detectado dicho tipo de cuerpo extraño en el pixel; y/o - para cada parámetro y compuesto determinado en b3) , representar cada pixel seleccionado de la imagen en un color dependiendo de la cantidad de dicha característica determinada para cada pixel; y/o - para cada tipo de microorganismo determinado en c2) , representar cada pixel seleccionado de la imagen en un color dependiendo de si se ha detectado dicho tipo de cuerpo extraño en el pixel. Las primera y segunda fuente de luz artificial pueden comprender una o más lámparas halógenas de 35W de potencia con reflector dicroico. En concreto, la primera fuente de luz artificial puede comprender varias lámparas (por ejemplo 3) halógenas de 35W de potencia con reflector dicroico de geometría semiesférica alineadas respecto a la horizontal, con un ángulo de inclinación respecto a la vertical de 30°. Y la segunda fuente de luz artificial puede comprender una fibra óptica que ilumina la muestra de carne desde abajo. En una realización, la muestra de carne se selecciona dependiendo de los resultados obtenidos en b2) y b3) , es decir, dependiendo de los cuerpos extraños, parámetros y compuestos detectados y su ubicación. En una realización, la cámara está colocada de manera fija por encima de una cinta transportadora y la pieza de carne o la muestra de carne de la que la cámara captura la imagen, pasa por debajo de la cámara fija movida por la cinta transportadora. En una realización, el rango del espectro en el que se recogen datos de la imagen hiperespectral es un rango de longitudes de onda entre 400 y 1000 nm. El al menos un equipo electrónico y la cámara pueden estar juntos o separados y comunicados a través de una red de comunicación, y en este último caso, al menos un equipo electrónico recibe los datos de al menos una (primera y/o segunda) imagen hiperespectral capturada, a través de la red de comunicación. En un segundo aspecto, la presente invención propone un sistema que lleve a cabo los métodos anteriormente citados. En concreto, propone un sistema para la determinación de características de carne (las características a determinar pueden comprender la presencia de cuerpos extraños y microorganismos patógenos de distintos tipos y la determinación de la cantidad de un grupo de parámetros y/o compuestos químicos) donde el sistema comprende: - Una cámara fija configurada para: - usando una primera fuente de luz artificial, capturar al menos una primera imagen hiperespectral de una pieza de carne, situada debajo de la primera fuente de luz artificial; y/o - usando una segunda fuente de luz artificial y una lente microscópica, capturar al menos una segunda imagen hiperespectral de una muestra de la pieza de carne, situada encima de la segunda fuente de luz artificial; - Al menos un equipo electrónico de procesamiento configurado para: - Aplicando un algoritmo de clasificación, a partir de los datos de la al menos una rimera imagen hiperespectral, seleccionar automáticamente aquellos píxeles pertenecientes a la imagen de la pieza de carne y/o a partir de los datos de la al menos una segunda imagen hiperespectral, seleccionar automáticamente aquellos píxeles pertenecientes a la imagen de la muestra de carne; - Para determinar la presencia de cuerpos extraños, comparar los datos obtenidos de la al menos una primera imagen hiperespectral para cada uno de los píxeles seleccionados y para cada longitud de onda del rango, con una firma espectral preestablecida para cada tipo de cuerpo extraño, donde la firma espectral de cada tipo de cuerpo extraño comprende un vector con el valor de reflectancia, para cada longitud de onda del rango, obtenido durante un proceso de entrenamiento previo, que corresponde a la presencia en carne de dicho tipo de cuerpo extraño; a partir de dicha comparación, determinar en cada uno de los pixeles seleccionados, si existe la presencia de un cuerpo extraño y el tipo de cuerpo extraño presente; - Para determinar parámetros y/o compuestos químicos, comparar los datos obtenidos de la al menos una primera imagen hiperespectral para cada uno de los píxeles seleccionados y para cada longitud de onda del rango, con una firma espectral preestablecida que corresponde a dicho parámetro o compuesto químico, donde la firma espectral de cada característica comprende un vector con el valor de reflectancia, para cada longitud de onda del rango, obtenido durante un proceso de entrenamiento previo, que corresponde a la presencia de dicho parámetro o compuesto químico en carne; a partir de dicha comparación, determinar la cantidad de cada uno de los parámetros y/o compuestos químicos del grupo en la pieza de carne en cada uno de los pixeles seleccionados; - Para determinar la presencia de microorganismos, comparar los datos obtenidos de la al menos una segunda imagen hiperespectral para cada uno de los píxeles seleccionados y para cada longitud de onda del rango, con una firma espectral preestablecida para cada tipo de microorganismo, donde la firma espectral de cada tipo de microorganismo comprende un vector con el valor de transmitancia, para cada longitud de onda del rango, obtenido durante un proceso de entrenamiento previo, que corresponde a la presencia en carne de dicho tipo de microorganismo; a partir de dicha comparación, determinar en cada uno de los pixeles seleccionados, si xiste la presencia de un microorganismo y el tipo de microorganismo. Finalmente, se presenta un programa de ordenador que comprende instrucciones ejecutables para implementar el método descrito, al ejecutarse en un ordenador, un procesador digital de la señal, un circuito integrado específico de la aplicación, un microprocesador, un microcontrolador o cualquier otra forma de hardware programable. Dichas instrucciones pueden estar almacenadas en un medio de almacenamiento de datos digitales. Para un entendimiento más completo de estos y otros aspectos de la invención, sus objetos y ventajas, puede tenerse referencia a la siguiente memoria descriptiva y a las figuras adjuntas. DESCRIPCIÓN DE LAS FIGURAS Para complementar la descripción que se está realizando y con objeto de ayudar a una mejor comprensión de las características de la invención, de acuerdo con unos ejemplos preferentes de realizaciones prácticas de la misma, se acompaña como parte integrante de esta descripción un juego de dibujos en donde, con carácter ilustrativo y no limitativo, se ha representado lo siguiente: La Figura 1 muestra de manera esquemática el sistema propuesto en funcionamiento de acuerdo con una realización de la invención, para el análisis macroscópico. La Figura 2 muestra de manera esquemática el sistema propuesto en funcionamiento de acuerdo con una realización de la invención, para el análisis microscópico. DESCRIPCIÓN DETALLADA DE LA INVENCIÓN La presente invención propone un método y sistema mejorado e integral de obtención (determinación) de manera automática, de diversas características de una pieza o trozo de carne (que puede ser una pieza completa de carne, una porción de la misma o una muestra extraída de la misma como veremos a continuación) a partir de imágenes hiperespectrales. Este método y sistema permite adquirir y procesar imágenes hiperespectrales (por ejemplo, en una línea de inspección) en tiempo real. Mediante el procesado de las imágenes adquiridas, la invención propuesta permite identificar de manera automática la carne a analizar dentro de la imagen tomada. Y a partir de esta identificación y aplicando modelos matemáticos a los datos hiperespectrales obtenidos, permite la obtención simultánea de las siguientes características de la carne: presencia de cuerpos extraños en la pieza de carne y cantidad de distintos parámetros químicos o compuestos de interés en la pieza de carne mediante el análisis de una misma imagen hiperespectral. Además, también permite la detección simultánea de varios tipos de microorganismos patógenos, mediante el análisis de una misma imagen hiperespectral (diferente a la imagen que se usa para detección del resto de características, ya que como se explicará a continuación para la detección de microorganismos se necesita una imagen capturada de manera distinta que para la detección de las otras características) . Como se obtienen a la vez numerosas características de la carne, se puede decir que la presente invención permite una detección multiparamétrica. Además, se puede almacenar y presentar la información obtenida (resultados obtenidos) sobre la pieza de carne al usuario, por ejemplo, mediante un display en el mismo sistema o enviándole la información a dispositivo electrónico del usuario (teléfono móvil, PC, tableta, portátil o cualquier otro tipo de dispositivo electrónico) . También el sistema propuesto puede permitir el almacenamiento histórico de la información obtenida de cada pieza y la creación de informes automáticos de resultados. Los parámetros físico-químicos o compuestos que se pueden determinar son de cualquier tipo, por ejemplo (esto es una lista no limitativa) : pH, Humedad, color instrumental, grasa y perfil de ácidos grasos (C14, C16, C17, C18 y C20) , a-tocoferol, p-Y-tocoferoles, neofitadieno, trioleína o cualquier otro. En general, se puede decir que se puede obtener mediante este procedimiento cualquier parámetro físico o químico de la carne (y en especial aquellos que determinan su calidad) . El sistema propuesto constará de un dispositivo que se usa para adquirir las imágenes hiperespectrales (llamada cámara hiperespectral o sensor hiperespectral) , que puede ser de cualquier tipo conocido. Dicha cámara obtendrá imágenes de xxy píxeles (donde x es el número de filas de pixeles e y el número de columnas de pixeles, por ejemplo, 512x512 ixeles, aunque cualquier otro número de píxeles es posible) . Así el espectro electromagnético que se mide es de 400 a 1000 nm, el cual está formado por 170 longitudes de ondas distintas (si la resolución espectral aproximada es de 3, 5 nm; esto es un ejemplo no limitativo y otras resoluciones espectrales son posibles) . Estas 170 longitudes de ondas son seleccionadas a partir de un filtrado del espectro en continuo completo. La cámara puede usar una lente común (a la que llamaremos lente macroscópica) para determinar los parámetros físico-químicos de la muestra y detectar los cuerpos extraños y una lente microscópica para detectar los microorganismos. Los términos macroscópico y microscópico se usan para referirse a dos escalas diferentes que son útiles para determinar el tamaño de diferentes compuestos: Así, las partículas o sustancias macroscópicas son lo suficientemente grandes como para ser observadas a simple vista sin ningún instrumento de aumento. Por el contrario, las partículas o sustancias microscópicas son demasiado pequeñas como para ser observadas a simple vista; por lo tanto, se necesitará un instrumento de aumento, como una lente microscópica para examinar los diferentes tipos de microorganismos. Es decir, la lente macroscópica no se utiliza para una visión aumentada de las muestras ya que principalmente sirve para enfocar, no para aumentar, mientras que la lente microscópica tendrá un aumento considerable para permitir detectar los microorganismos que no son visibles a simple vista. Para la detección de cuerpos extraños pequeños se realiza dicha detección a partir de la imagen obtenida con la lente común (macroscópica) . En una realización, la cámara será una cámara hiperespectral lineal capaz de medir la reflectancia en el espectro electromagnético desde 400 a 1000 nm (esto es un ejemplo no limitativo y en otras realizaciones el intervalo espectral puede ser cualquier otro) . En una realización, la resolución espacial es igual o superior a 4 píxeles/mm para la lente macroscópica y 50 píxeles/mm para la lente microscópica (esto es un ejemplo no limitativo y en otras realizaciones la resolución puede ser cualquier otra) . Para realizar todo el procesado que se explicará a continuación, el sistema constará de un equipo electrónico de procesamiento (también llamado simplemente unidad, equipo, módulo o dispositivo de procesamiento o más simplemente procesador) que recibe las imágenes capturadas y las procesa para obtener las características deseadas (aunque por simplicidad, hablamos de un equipo de procesamiento puede haber una sola unidad que realiza todo el rocesado o haber varias unidades, cada una de las cuales realizar alguna de las acciones del procesado) . El equipo de procesamiento puede mostrar los resultados al usuario (mediante un interfaz de usuario como por ejemplo una pantalla) y/o puede enviar los resultados obtenidos a un dispositivo electrónico del usuario (por ejemplo, un teléfono móvil, un ordenador, etc.) a través de una red de comunicación sin hilo, de telefonía móvil, red cableada o de cualquier tipo. El dispositivo electrónico del usuario y/o el equipo de procesamiento pueden almacenar los resultados numéricos (valores de los parámetros obtenidos) e incluso los posibles mapas de color generados, en archivos que podrán ser procesados en masa posteriormente. El equipo electrónico de procesamiento puede estar conectado a la cámara directa o indirectamente mediante cualquier tipo de red de comunicación (cableada o sin hilo, red de telefonía móvil, etc) usando cualquier tipo de tecnología, como Bluetooth, telefonía móvil o cualquier otra. Es decir, el equipo electrónico y la cámara forman parte del mismo dispositivo o están separados y comunicados a través de una red de comunicación y en este segundo caso, el equipo electrónico recibe la imagen hiperespectral capturada a través de la red de comunicación Asimismo, en una realización, no es necesaria una conexión permanente entre la cámara y el equipo informático. La cámara podrá disponer de una unidad de almacenamiento de las imágenes, que permitirá su procesado posterior al transferir (descargar) la información al equipo electrónico de procesamiento correspondiente. Por otro lado, la cámara y el equipo electrónico de procesamiento pueden estar separados, pero también pueden estar dentro de la misma carcasa formando parte del mismo equipo (es decir, un mismo equipo captura las imágenes y las procesa para obtener los resultados) . O haber varios equipos de procesamiento algunos de las cuales están incorporados en la cámara y otras separados de ella (o en otras palabras, la cámara puede realizar además de la captura, algunas de las acciones para el procesado de imágenes) . En la figura 1 se muestra, de manera esquemática, el sistema propuesto (de acuerdo con una realización de la invención) , cuando se usa una lente macroscópica (por ejemplo, para la obtención de los parámetros y compuestos químicos) . En esta figura se muestra la cinta transportadora (1a) , la cámara hiperespectral (1b) , el sistema de iluminación (1c) y el aterial para calibración (1d) . Por otro lado, en la figura 2 se muestra, de manera esquemática, el sistema propuesto (de acuerdo a una realización de la invención) , cuando se usa una lente microscópica (por ejemplo para la detección de microrganismos patógenos) . En esta figura se muestra la cinta transportadora (2a) , la cámara hiperespectral (2b) , la lente microscópica (2c) , el sistema de iluminación (2d) , la base rectangular de análisis de muestras (2e) y el regulador del sistema de iluminación (2f) . En las realizaciones que se muestran a continuación (y en las figuras 1 y 2) , la adquisición de las imágenes está concebida sobre una cinta transportadora (1a, 2a) por donde pasarán de manera continua las piezas de carne (para así poder analizar rápidamente una gran cantidad de piezas, incluso la totalidad de la producción si se desea) . De manera que la cámara hiperespectral está colocada de manera fija (sin moverse) y por la cinta transportadora pasa la carne a fotografiar por debajo de la cámara. Pero eso es solo un ejemplo, y en otras realizaciones se puede realizar la adquisición de imágenes hiperespectrales de las piezas de carne en cualquier otra forma y cualquier otro lugar (por ejemplo, pasando las piezas una a una por la cámara hiperespectral fija manualmente...) . Hay que decir que, en el caso del análisis microscópico, la velocidad de la cinta transportadora normalmente tiene que ser mucho menor que para el caso macroscópico, ya que la muestra debe pasarse a una velocidad lenta para que la imagen microscópica se puede tomar adecuadamente. En el procedimiento propuesto se distinguen tres etapas principales, adquisición (captura) de la imagen (realizada en la cámara) , procesado de la imagen y obtención de resultados (el procesado y la obtención de resultados se realiza en uno o varios equipos de procesamiento) . Después los resultados obtenidos se pueden presentar al usuario de distintas formas. Cada una de estas etapas podrá tener a su vez distintos pasos o acciones. Adquisición de la imagen (esto es solo un ejemplo de las acciones a realizar y no todas son esenciales y, por lo tanto, necesarias para el procedimiento propuesto) : Preferentemente, la cámara (1b, 2b) se coloca con la óptica en dirección vertical (perpendicular al plano donde se coloca la pieza de carne) y visualizando la muestra perpendicularmente a una altura h respecto de la muestra, de modo que la longitud L (que se corresponde con la extensión de muestra o pieza de carne a analizar determinada en función del objeto de estudio) será proporcional a h según la razón L = 2 - h- tg ( ^ ) , siendo y el ángulo de visión de la óptica. En ambos casos, la cámara hiperespectral (1b, 2b) permite obtener los espectros para cada pixel de la imagen. En el caso de la figura 1, se usa una lente macroscópica que permite analizar las características fisicoquímicas de la muestra (y los cuerpos extraños) y, en la Figura 2, se usa una lente microscópica (2c) para poder visualizar los microorganismos. En el caso macroscópico, la cámara debe colocarse a una distancia compatible con la distancia de trabajo de la óptica empleada por la cámara. La resolución espacial del sensor de la cámara junto con las características específicas de la óptica conlleva el uso de distancias de trabajo concretas para la obtención de una definición suficiente, que se ajustará a las características de la muestra a analizar. Por ejemplo, la relación entre la distancia a la que se coloca la cámara de la carne a analizar, puede venir dada según la relación donde R (px/mm) es la resolución en píxeles por milímetro y d es la distancia medida entre la carne y la óptica de la cámara (esto es solo un ejemplo, y se pueden emplear otras fórmulas para obtener la relación entre la resolución y la distancia) ; esta distancia ha de encontrarse dentro del rango de distancias en que la óptica es capaz de enfocar correctamente. La proporción 1, 024 está calculada específicamente para la cámara empleada en el presente ejemplo (donde la resolución espacial es de 512 x 512 píxeles) . En general, se puede decir que la distancia entre la cámara y las muestras dependerá de factores como el tamaño de la muestra, la resolución espacial del sensor de la cámara, la óptica empleada y la iluminación. En una realización, como iluminación (1c) se utilizarán, cuando se usan lentes macroscópicas, 3 lámparas halógenas de 35W de potencia con reflector dicroico de geometría semiesférica alineadas respecto a la horizontal, con un ángulo de inclinación respecto a la vertical de 30° (ver figura 1) . Esto es solo un ejemplo no limitativo y en otras realizaciones se pueden usar otro tipo de lámparas alineadas o no, y con otros ángulos respecto a la vertical. Como fuente de iluminación alternativa en el caso de realizar determinaciones microscópicas (figura 2) , en una realización se propone el empleo de un iluminador que porta una lámpara halógena dicroica de 35W que proyecta luz hacia un conductor de fibra óptica cuyo terminal conforma un hueco rectangular de 1 cm de largo por 1 mm de ancho sobre la que se sitúa la muestra (2d) (esto es solo un ejemplo no limitativo y en otras realizaciones, el hueco puede tener otras dimensiones y usarse otro tipo de lámparas) . A su vez este hueco forma parte de una base rectangular sobre la que se sitúa la muestra (2e) . Esta fuente de iluminación es regulable (2f) para obtener el nivel de intensidad deseado, siendo el nivel óptimo aquel que permite la transmisión de la luz aceptable para la obtención de las imágenes hiperespectrales a través de la lente microscópica. Es decir, en el caso de análisis macroscópico, la carne se ilumina desde arriba, la luz se refleja en la carne y la cámara recoge medidas de reflectancia (a las distintas longitudes de onda) . En el caso de análisis microscópico, la fuente de luz está debajo de la muestra de carne por lo que la luz atraviesa la carne y se puede decir que la cámara recoge medidas de transmitancia (a las distintas longitudes de onda) . Hay que decir también que en el caso de análisis macroscópico se puede analizar toda la pieza de carne (como se ve en la figura 1) , mientras que en el análisis microscópico no se analiza toda la pieza de carne sino una muestra que se extrae de la pieza de carne. En un ejemplo no limitativo dicha muestra es de 25 cm2 de superficie y 1mm de espesor. Esta muestra se puede escoger al azar o atendiendo a determinados criterios; en una realización, la localización de esta muestra en la pieza de carne se selecciona dependiendo de los resultados del análisis de parámetros físico-químicos y compuestos químicos y/o del resultado de la detección de cuerpos extraños previamente realizado sobre todo la pieza. En una realización, la integración del objetivo microscópico de 40 aumentos en este caso (esto es un ejemplo no limitativo y se pueden usar otros aumentos) en la cámara hiperespectral conllevó el diseño de un adaptador específico para su adaptación a la montura C. Siendo ésta la montura más estándar para las cámaras CCD y CMOS para aplicaciones industriales y científicas, se empleó esta montura para poder replicar en el futuro este equipamiento en otras instalaciones (aunque esto es un ejemplo no limitativo y en otras realizaciones se pueden usar otro tipo de monturas) . El mecanismo roscado permite optimizar y adecuar la distancia de trabajo, que para esta óptica se suele situar entre 0, 5 y 1 mm de la muestra a observar. Soliendo ser el aumento de la lente microscópica (2c) mayor o igual a 40 veces el tamaño de la muestra. La magnificación de una óptica es la relación entre el tamaño de la imagen y el tamaño del objeto, cuyas características dependen de la óptica y de la distancia al objeto. En esta aplicación de visión artificial hay que tener en cuenta que la magnificación está relacionada con el tamaño del sensor, por lo que es fundamental conocer el equipo sobre el que se instala para poder optimizar la distancia al objeto de estudio. Teniendo en cuenta todos estos aspectos, la metodología propuesta preferentemente incluye una calibración de la iluminación al principio de la sesión de adquisición, lo que lo hace robusto a cambios en las condiciones de adquisición. La calibración se puede realizar midiendo el espectro de reflectancia de un material de referencia, que se usa para las medidas de reflectancia; el espectro de este material es estable en el tiempo, por lo que el perfil espectral de las muestras se mide de manera relativa a este material, eliminando la dependencia con las condiciones ambientales y con el mismo tamaño que la línea de inspección de la cámara. La línea de inspección es todo el campo de visión que la cámara permite ver en cada toma de una imagen hiperespectral. De tal manera que la construcción de una imagen se realiza línea a línea, de forma que el objeto se desplaza con respecto a la cámara. Siendo el tamaño de las imágenes capturadas tan ancho como el de la línea de inspección (por ejemplo, en una realización este ancho podría ser de entre 64 y16.000 pixeles, tal como proporciona el fabricante) y tan largo como requiera la muestra a analizar. La calibración solo es necesaria al principio de la sesión, por lo que el material de referencia (1d) sería usado sólo en la primera toma de imágenes. Análogamente, se puede tomar una imagen del ruido de fondo con el fin de normalizar las imágenes obtenidas. En ambos casos (macroscópico y microscópico) se sigue el mismo proceso. Una vez que el sistema está calibrado, tanto para la lente macroscópica cómo microscópica no es necesario volver a calibrar. En otras palabras, una vez se ha colocado la cámara (a la orientación, distancia y condiciones de iluminación adecuadas) preferentemente se produce la calibración de la magen. Para ello, por ejemplo, se coloca un elemento válido para la calibración (como por ejemplo, un marco de calibración) orientado hacia la cámara y junto al objeto cuya imagen se quiere capturar y se realiza la calibración de la cámara (mediante la opción correspondiente en la cámara o posteriormente durante el procesado de la imagen) . El marco de calibración consiste en una figura geométrica (por ejemplo, en forma de marco cuadrado) , de un área suficientemente amplia como para quedar representada en la imagen por un conjunto de píxeles suficiente para la ejecución de la normalización, que sirve de referencia de blancos al estar compuesto por un material que consta de una reflectancia máxima en todo el rango espectral, por lo que estará fabricado preferentemente de PTFE (politetrafluoroetileno) . En el caso de análisis microscópico, la calibración se puede realizar midiendo el espectro de transmitancia de un material de referencia, que se usa de referencia para las medidas de transmitancia. En la anterior explicación se ha tratado primero la adquisición de una imagen usando lente macroscópica y después la adquisición de una imagen usando lente microscópica; pero esto es solo una forma de exponerlo y no quiere decir, de ningún modo, que para obtener las imágenes haya que seguir siempre ese orden; es decir, se puede obtener primero una o más imágenes usando lente microscópica (figura 2) y después una o más imágenes usando lente macroscópica (figura 1) , o viceversa. -A continuación, se realiza la captura de una muestra de carne que se quiere analizar. Procesado de la imagen (esto es solo un ejemplo de las acciones a realizar y no todas son esenciales y, por lo tanto, necesarias para el procedimiento propuesto) : - Como hemos indicado, aunque se habla de "imagen" hiperespectral, en verdad, lo que se obtiene es una batería de imágenes de una misma escena (de un mismo objeto) donde cada una representa la reflectancia (o transmitancia, dependiendo de donde se encuentre la fuente de luz respecto al cuerpo del que se captura la imagen) a una longitud de onda del espectro. Por lo que al final, lo que se obtiene de la cámara hiperespectral es una matriz de tres dimensiones (llamada hipercubo) con la medida de la reflectancia (o transmitancia) de cada punto de la imagen (pixel) a cada longitud de onda. En una realización, para su procesado, lo primero que se hace es la conversión de dicha matriz de tres dimensiones o hipercubo a una matriz plana (bidimensional) este proceso se llama desplegamiento o más conocido por su término en inglés, "unfolding". En el ejemplo citado anteriormente donde las imágenes son de xxy pixeles y se capturan datos en, por ejemplo, 170 longitudes de onda distintas (este número viene determinado por el filtrado de longitudes de ondas que se realiza sobre el espectro electromagnético en continuo) las dimensiones de la matriz pasan de ser de xxyx 170 (tridimensional) a x y x 170 (bidimensional) . - Segmentación de la imagen. En este proceso se procede a la identificación de los píxeles que corresponden a la región de interés. La región de interés será la (pieza de) carne que se quiere analizar que, como se ha indicado, puede ser una pieza entera de carne, un fragmento o una muestra de la misma. En primer lugar, se puede llevar a cabo un proceso de normalización usando para ello las imágenes de calibración y de ruido de fondo. Seguidamente se lleva a cabo el proceso de preprocesado de las imágenes, para ello se pueden usar herramientas de preprocesado clásicas como son la primera y la segunda derivada, el SNV (Standard Normal Variate) o el Smoothing. Una vez se ha realizado el preprocesado se lleva a cabo la segmentación propiamente dicha o "masking". Para ello cada uno de los pixeles se evalúa mediante un clasificador que decide si pertenece o no a la región de interés (carne a analizar) . Esta clasificación es multivariante e influyen en diferente medida las longitudes de onda disponibles para cada uno de los puntos de la imagen (170 en este caso de ejemplo) . Este clasificador puede utilizar cualquier herramienta conocida (por ejemplo, máquina de vectores de soporte, del inglés "Support Vector Machine, en inteligencia artificial) , normalmente basadas en un entrenamiento (previo) donde se definen las características de los pixeles que pertenecen a la muestra. El resultado es un vector de longitud igual al número de píxeles (xxy) , donde en cada uno se indica con 0 o 1 la pertenencia a la región de interés. La suma de este vector son el número de píxeles (F) donde hay muestra en la imagen. Este vector puede replegarse a las dimensiones espaciales del hipercubo. El resultado es una matriz plana (xxy) donde se muestran estas regiones en el hipercubo. En una realización a modo de ejemplo no limitativo, el clasificador usado para identificar los pixeles que pertenecen a la región de interés se basa en la búsqueda de hiperplanos que separan las muestras utilizando el espectro completo como variables independientes. La clasificación se realiza a partir de unas imágenes utilizadas ara el entrenamiento del algoritmo de clasificación que, una vez puesto a punto, es verificado al comprobar su idoneidad con muestras externas. Durante la puesta a punto de la solución propuesta, los modelos matemáticos de clasificación usados preferentemente son verificados con decenas de imágenes disponibles, para asegurar que son lo más exactos posibles. - A continuación, se pueden recopilar los espectros de los píxeles seleccionados, es decir, los pixeles que pertenecen a la región de interés (carne a analizar) a los que se le ha asignado un 1 en la clasificación realizada anteriormente. También se recopilan las coordenadas (x, y) de estos puntos (pixeles) en la imagen. El resultado es un espectro individual para cada uno de los F píxeles de región de interés (cada espectro individual tendrá los valores de reflectancia/transmitancia para cada una de las longitudes de onda tratadas, 170 en el ejemplo usado anteriormente) ; estos serían los espectros de interés. También se obtendría una matriz con las coordenadas x, y de cada uno de los espectros de interés, o en otras palabras con las coordenadas de cada pixel que pertenece a la región de interés (carne a analizar) . También se puede obtener una imagen RGB que muestra en color la imagen de la región de interés. La información que se obtiene a partir de la adquisición y procesado sirve como punto de partida para el resto de los análisis a realizar para obtener los resultados, es decir, las características deseadas de la muestra de carne. En la siguiente explicación se van a detallar los análisis, para obtener distintas características, en un cierto orden; pero esto es solo una forma de explicarlo y no quiere decir, de ningún modo, que el análisis se tenga que realizar necesariamente en ese orden ni siquiera que se tenga que hacer uno después de otro, ya que se pueden realizar dichos análisis simultáneamente. Análisis de cuerpos extraños: Mediante este análisis se detectan e identifican posibles cuerpos extraños que haya en la porción de carne de interés. En general, este análisis se extenderá a toda la pieza de carne a comercializar para asegurar que no se encuentran cuerpos extraños en la misma. Algunos de los cuerpos blandos extraños a identificar pueden ser, por ejemplo, temilla, absceso, hueso, tendón, suciedad ruminal, carne encallada, coágulo, pelo, piel, callo, etiqueta y costillas; pero esta técnica se puede aplicar a cualquier otro tipo de elementos extraños que se desee. Los espectros de las zonas seleccionadas en la segmentación son almacenados en una matriz plana de n píxeles x 170 longitudes de onda (en el caso del ejemplo, donde se miden reflectancias para 170 longitudes de onda) . En una realización se usa una técnica de clasificación de análisis lineal discriminante (esto es solo un ejemplo no limitativo y se puede usar cualquier otra técnica de clasificación conocida) . Este análisis lineal discriminante es un método de clasificación basado en unas categorías que han sido previamente descritas y calculadas, a las cuales se les ha asignado para cada longitud de onda un coeficiente que permite identificarlas. Estos coeficientes es lo que se conoce como función discriminante. En el anexo 1, se encuentran las funciones discriminantes (coeficientes) para la determinación de cuerpos extraños obtenidas de acuerdo a una realización de la invención (esto es solo un ejemplo y en otras realizaciones se pueden obtener y usar otros valores para los coeficientes) . Se tendrá un coeficiente para cada una de las bandas electromagnéticas (170 en el caso de ejemplo) y para cada tipo de cuerpo extraño a detectar. Para obtener estos valores previos de la función discriminante para cada categoría de cuerpo extraño (como los mostrados en el anexo 1) , en un proceso de entrenamiento previo (usando por ejemplo técnicas de inteligencia artificial como "machine leaming") se ha obtenido la firma espectral (también llamada patrón espectral) que caracteriza cada tipo de cuerpo extraño. Es decir, se han capturado imágenes espectrales de prueba de distintas muestras en los en los que sí se conocía la presencia de cuerpo extraños, su tipo y ubicación y, a partir de ahí, se ha obtenido el valor en cada una de las longitudes de onda de los coeficientes que identifica la presencia de cada tipo de cuerpo extraño. Los perfiles espectrales de cada uno de los cuerpos extraños fueron definidos previamente de manera individual y posteriormente testados sobre diferentes matrices cárnicas con el fin de poder identificarlos. Para la detección, cada espectro de la muestra se multiplica elemento a elemento con los oeficientes de la función discriminante, se suman los resultados y se añade el término independiente. Así, se obtiene un valor para cada cuerpo extraño, asignando a cada píxel la categoría (el cuerpo extraño) cuya función discriminante haya dado un valor más alto. Como se asigna una categoría siempre y lo normal es que no haya ningún tipo de contaminación, los espectros de carne sana y sin contaminar también se añaden en los modelos. En el anexo 1, por ejemplo, la categoría "carne" indica carne sana (en el sentido de que esos píxeles no presentan ningún tipo de cuerpo extraño) y la categoría "fondo" se asigna a aquellos píxeles de la imagen que no pertenecen a una muestra cárnica (es decir, no son parte de la pieza de carne sino del fondo de la imagen) . Así se genera una máscara que permite determinar si, para cada pixel de la pieza de carne analizada, hay algún cuerpo extraño (o es carne sana sin cuerpo extraño) , qué tipo de elemento extraño es e identificar donde se encuentran dentro de la muestra de carne (ya que se indican los píxeles de la imagen que se clasifican como pertenecientes a dicho cuerpo extraño) . Los resultados se pueden mostrar mediante la creación de imágenes donde se indican con códigos de color el tipo de cuerpo extraño identificado o también con cualquier tipo de reporte o informe donde se indique si hay o no cuerpo extraño y el tipo y ubicación del cuerpo extraño (en el caso de que lo haya) . En el ejemplo particular del anexo 1, se encuentran los coeficientes para los cuerpos extraños del tipo ternilla, absceso, hueso, tendón, carne ruminal, carne encallada, coagulo, pelo, piel, callo, costilla y etiqueta y también los coeficientes de tipos de carne no contaminada ("carne") y del fondo de la imagen. Pero esto es solo un ejemplo, y mediante el proceso de entrenamiento previo anteriormente citado, se pueden obtener coeficientes para otro tipo de cuerpos extraños y de carne no contaminada. Análisis de parámetros físico-químicos y compuestos químicos: Éste es un análisis cuantitativo en el que se determina el valor de ciertos parámetros físico/químicos o la cantidad/concentración de ciertos compuestos químicos en la muestra de carne, mediante imágenes hiperespectrales, utilizando lente macroscópica. Los parámetros/compuestos a determinar pueden ser por ejemplo pH, humedad, color instrumental (se suele llamar color instrumental a las medidas de color de la carne, que se miden en el espacio de color L a b, siendo la L la luminosidad que va desde el negro hasta el blanco y la a y b dos gamas de colores que van desde el verde hasta el rojo y desde el azul hasta el amarillo) , grasa y perfil de ácidos grasos (C14, C16, C17, C18 y C20) , atocoferol, p-Y-tocoferoles, neofitadieno y trioleína, o cualquier otro tipo de parámetro o compuesto químico. De ellos, aquellos cuya identificación y cuantificación (sobre todo, en cuanto a diferencias hay en los diferentes tipos de matrices cárnicas) suele ser más útil e importante serían el contenido en grasa y perfil de ácidos grasos (mirístico o miristoleico C14, palmítico C16, esteárico C18) . Mediante este análisis, a partir de los espectros adquiridos y procesados (de la muestra de carne) y de una firma espectral obtenida previamente para cada parámetro/compuesto (y también puede que para cada tipo animal o zona de muestreo de la carne) se determina (estima) la medida de uno o más parámetros/compuestos de interés en la carne que se está monitorizando. Para ello, en un proceso de entrenamiento previo (usando por ejemplo técnicas de inteligencia artificial como "machine leaming") se ha obtenido la firma espectral (también llamada patrón espectral) que caracteriza cada uno de los parámetros/compuestos que se quiere medir en cada tipo de fruto. Es decir, se han capturado imágenes espectrales de prueba de distintas muestras de carne en las que sí se conocía la medida de los parámetros/compuestos de interés, se ha correlacionado los datos de estas imágenes hiperespectrales con la cantidad de cada parámetro/compuesto presente y, a partir de ahí, se ha obtenido el valor en cada una de las longitudes de onda que cuantifica la presencia de cada uno de los parámetros. Para asegurar la precisión del modelo, se ha construido un diseño experimental para el entrenamiento previo, que en primer lugar separa las muestras en sets de calibración y de validación. Con las muestras de calibración se han entrenado los modelos y con las de validación se ha verificado la idoneidad de los mismos. Existen en quimiometría herramientas estadísticas y parámetros de calidad que aseguran el correcto funcionamiento de los mismos, la falta de fenómenos no deseados de sobreajuste y que al mismo tiempo asegura que el modelo seguirá funcionando con nuevas muestras en un futuro. En una realización, al ser un análisis cuantitativo, en el entrenamiento se aplican modelos de egresión multivariante como son, por ejemplo, la regresión por mínimos cuadrados parciales (PLSR) o la regresión múltiple lineal (MLR) . También se aplica modelos de inteligencia artificial como son, por ejemplo, el machine learning. El resultado final de estos modelos de entrenamiento es un vector (patrón o firma espectral) con un coeficiente por cada longitud de onda más un término independiente que, aplicado a un espectro problema, arroja un valor numérico que corresponde con la magnitud a analizar. Dichos coeficientes dependen del analito (es decir, del parámetro o compuesto que se quiere medir) y de la naturaleza de la muestra (como tipo de animal y zona de muestreo) . El resultado en cada caso (en el ejemplo concreto de 170 longitudes de onda) es un vector de 171 elementos (un coeficiente para las 170 longitudes de onda más un término independiente) que depende del parámetro/compuesto a cuantificar. En el anexo 2, se encuentran los coeficientes obtenidos para la determinación cuantitativa de los siguientes compuestos: trioleína, a-tocoferol, p-Y-tocoferoles, ácidos miristoleico, palmítico y oleico y neofitadieno (esto es solo un ejemplo, y mediante el proceso de entrenamiento previo anteriormente citado, se pueden obtener otros coeficientes y para otro tipo de compuestos o parámetros químicos) . Como se ha indicado, se tiene un coeficiente para cada una de las bandas electromagnéticas (170 en el caso de ejemplo) y para cada compuesto a detectar. A continuación, se compara el espectro de la imagen capturada con estos coeficientes de la firma espectral para estimar la cantidad presente de dicho analito (caracterizado por la firma espectral) en la carne cuya imagen se ha capturado. Así, para cada uno de los F (siendo F el número de píxeles de la región de interés como se ha explicado antes) pixeles de la carne de la imagen hiperespectral capturada, se multiplica cada valor del espectro del píxel (para cada longitud de onda) por su coeficiente correspondiente, se suman los valores obtenidos y se añade el término independiente. El dato obtenido será el resultado de dicho analito en ese punto (o mejor dicho en ese pixel) de la carne. Se aplica este procedimiento (multiplicación y suma) a cada uno de los F píxeles y se obtiene la matriz de resultados. Esto es solo un ejemplo y la comparación para obtener los resultados se puede realizar de cualquier otro modo conocido. Los resultados se pueden exportar a un archivo (txt, xlsx, csv...) mostrando un análisis estadístico (valor medio de cada uno de los analitos, dispersión de los resultados, etc) . Además del documento con los resultados numéricos, se puede crear una imagen donde se muestran gráficamente. Por ejemplo, sobre una imagen real a color se superpone la retícula de las regiones seleccionadas por la segmentación y se muestra en una escala de color la concentración de un determinado analito. Análisis de contaminación microbiana: Mediante este análisis de contaminación microbiana se identifican y se cuantifican diferentes tipos de microrganismos, especialmente se usa para aquellos seleccionados como los principales patógenos existentes en carnes. Algunos de estos microrganismos que son patógenos típicos de la carne y que se detectan con la invención propuesta son: Escherichia coli, Pseudomonas spp., Listeria monocytogenes, Enterobacteria, Salmonella spp. Staphylococcus Aureus o Lactobacillus spp. Esto es solo un ejemplo y esta técnica se puede aplicar a cualquier otro tipo de elementos extraños que se desee. A partir de un sistema de visión artificial basada en una cámara hiperespectral con una lente microscópica acoplada, sensible a un rango del espectro electromagnético (por ejemplo 400 a 1000 nm aproximadamente) , se generan datos hiperespectrales para un determinado número de bandas (170 en el ejemplo que estamos usando) distribuidas de manera homogéneas con el fin de detectar, identificar y cuantificar los diferentes componentes microbiológicos (microrganismos) . El sistema de iluminación empleado en el ejemplo mostrado en la figura 2, consiste en un iluminador que porta una lámpara halógena dicroica de 35W que proyecta luz hacia un conductor de fibra óptica cuyo terminal conforma una base rectangular de 1 cm de largo por 1 mm de ancho sobre la que se sitúa la muestra de carne a analizar. Esta fuente de iluminación es regulable para obtener el nivel de intensidad deseado, siendo el nivel óptimo aquel que permite la transmisión de la luz aceptable para la obtención de las imágenes hiperespectrales. En una realización, se han realizado ensayos en los que se han podido identificar a través de la tecnología hiperespectral los diferentes microrganismos mencionados anteriormente obre diferentes tipos de medios de cultivos (agua de peptona y agar) , así como muestras de carne, analizando una muestra de carne de 25 cm2 en cada uno de los ensayos. Otro método alternativo sobre el que se han realizado ensayos en línea con la contaminación sobre carne es la identificación de las diferentes cepas sobre placas de contacto Rodac, de tal manera que los microrganismos puedan ser transferidos e identificados de forma eficiente. Aplicando la solución propuesta se han llegado a identificar cada uno de los microrganismos en concentraciones que van desde rango menores de 102 ufc/ml hasta 109 ufc/ml. Como se ha indicado anteriormente, a partir de un sistema de visión artificial basada en una cámara hiperespectral, se obtienen medidas para cada pixel de la región de interés y para un cierto número de longitudes de onda (170 para el caso de ejemplo) . En una realización se usa una técnica de clasificación de análisis lineal discriminante como en el caso de detección de cuerpos extraños (esto es solo un ejemplo no limitativo y se puede usar cualquier otra técnica de clasificación conocida) . Como se ha indicado anteriormente, este análisis lineal discriminante es un método de clasificación basado en unas categorías que han sido previamente descritas y calculadas, a las cuales se les ha asignado para cada longitud de onda un coeficiente que permite identificarlas. Estos coeficientes es lo que se conoce como función discriminante. En el anexo 3, se encuentran las funciones discriminantes (coeficientes) obtenidas para la detección del microorganismo salmonella de acuerdo a una realización de la invención (esto es solo un ejemplo y en otras realizaciones se pueden obtener y usar otros valores para los coeficientes) . Se tendrán coeficientes para cada una de las bandas electromagnéticas (170 en el caso de ejemplo) , los correspondientes a la de presencia de contaminación por el patógeno en estudio (en el caso del anexo 3, salmonella) y el correspondiente a carne no contaminada. Para obtener estos coeficientes, en un proceso de entrenamiento previo (usando por ejemplo técnicas de inteligencia artificial como "machine leaming") se ha obtenido la firma espectral (también llamada patrón espectral) que caracteriza la contaminación por cada microorganismo. Es decir, se han capturado imágenes espectrales de prueba de distintas muestras contaminadas por cada uno de los patógenos y de muestras sin contaminar y, a partir de ahí, se ha obtenido el valor en cada una de las longitudes de onda de los oeficientes correspondientes. Para la detección, cada espectro de cada pixel de la muestra se multiplica elemento a elemento con los coeficientes de la función discriminante, se suman los resultados y se añade el término independiente. Así, se obtiene un valor para cada patógeno en estudio y el correspondiente a carne no contaminada, asignando a cada píxel la categoría (patógeno o carne no contaminada) cuya función discriminante haya dado un valor más alto. Así se genera una máscara que permite determinar si para cada pixel de la muestra hay contaminación por un patógeno, qué tipo de patógeno es y la cantidad del mismo. En una realización, para llevar a cabo la identificación de dichos microorganismos, se realiza sobre cada imagen hiperespectral un pretratamiento de la imagen que permite normalizar el espectro de cada pixel para poderlos comparar en las mismas condiciones. Una vez realizada dicha comparación se identifican los microorganismos mediante una serie de umbrales de intensidad en determinadas longitudes de onda, asignando a cada pixel si dicho pixel corresponde a un microorganismo y cuál de ellos es (distinguiéndolo, por ejemplo, mediante un color como verde, rojo o azul) o si bien corresponde a parte de la muestra cárnica sin presencia de microorganismo, es decir, sin contaminar (distinguiéndolo por ejemplo, mediante un color negro) . Para llevar a cabo también la cuantificación de los microorganismos, en una realización, se ha desarrollado un modelo por la regresión por mínimos cuadrados parciales (PLSR) a la que también se aplica modelos de inteligencia artificial como son, por ejemplo, el machine learning, que permiten mantener el modelo actualizado. El resultado final de estos modelos de entrenamiento es un vector (patrón o firma espectral) con un coeficiente por cada longitud de onda más un término independiente que, aplicado a un espectro problema, arroja un valor numérico que corresponde con la magnitud a analizar. Dichos coeficientes (que son distintos a los que se usan para la detección, es decir, son distintos a los que aparecen en el anexo 3) dependen del microorganismo que se quiere cuantificar y de la naturaleza de la muestra (como tipo de animal y zona de muestreo) . El resultado en cada caso (en el ejemplo concreto de 170 longitudes de onda) es un vector de 171 elementos (un coeficiente para las 170 longitudes de onda más un término independiente) que depende del parámetro/compuesto a cuantificar. Es decir, cada coeficiente correspondería a la presencia e una unidad formadora de colonias de dicho microorganismo para cada longitud de onda, multiplicando el espectro obtenido para cada pixel por estos coeficientes se obtiene la cantidad de dicho microorganismo en dicho pixel. La cuantificación se puede expresar en la magnitud de unidades formadoras de colonias (u.f.c.) que puede ser mostrada en función del área (cm2) o de la masa (gramos) ; esto es solo un ejemplo y en otras realizaciones se puede usar otro tipo de unidades de cuantificación. Los datos obtenidos para cada muestra se pueden almacenar en un archivo donde se muestra la estadística correspondiente. Como se ha indicado anteriormente, además, se puede crear una imagen donde se muestran gráficamente; para ello, sobre una imagen real a color se superpone la retícula donde con un código de color (por ejemplo, negro, verde, rojo y azul) se identifican y cuantifican cada uno de los diferentes microorganismos presentes en la muestra. Así, por ejemplo, los colores verde, rojo o azul pueden indicar que en ese pixel hay un cierto tipo de microrganismo y el color negro que dicho pixel está sin contaminar. En general, los resultados obtenidos en los análisis anteriores (determinación de parámetros o compuestos químicos, de cuerpos extraños o de microorganismos patógenos) se pueden procesar de distintas maneras para presentarlos al usuario. Así, los datos obtenidos se pueden exportar a un archivo mostrando los datos en bruto o con algún tipo de análisis estadístico y este archivo de datos se puede almacenar en el equipo electrónico de procesamiento y/o enviar a un dispositivo electrónico del usuario para que él acceda al mismo (y lo almacene en su dispositivo si así lo desea) . También para que los resultados sean más fácilmente entendibles y visualizados por el usuario, se pueden presentar, como se ha indicado, en forma de un mapa de color de las muestras de carne. En estos mapas, a través de una gradación de color para cada pixel, se representa visualmente una escala numérica de modo que, de un simple vistazo, es posible ver la magnitud de un parámetro dentro de una imagen (en el caso de que los datos obtenidos sean cuantitativos, como en el análisis de parámetros químicos) o simplemente se representa con un color distinto según el tipo de cuerpo extraño o el tipo de microorganismo detectado en cada pixel (y con otro color si no se ha detectado cuerpo extraño/microrganismo) . Así, los resultados se pueden acompañar del mapa de color resultante para la mejora de la comprensión de los resultados. En una realización de la invención, se pasa la pieza de carne (mediante cinta ransportadora) por debajo de la cámara hiperespectral para tomar una imagen hiperespectral y, a partir de ella (y tras procesarla convenientemente) se hace el análisis para detectar los cuerpos extraños y determinar los parámetros físico-químicos y compuestos químicos. Después (o antes en otras realizaciones) se extrae una muestra de dicha pieza de carne del tamaño apropiado y se pasa por una cámara hiperespectral (la misma u otra distinta) con la lente microscópica (por ejemplo usando la estructura mostrada en la figura 2) para tomar una imagen hiperespectral y, a partir de ella (y tras procesarla convenientemente) se hace el análisis para detectar los microorganismos. Para este último análisis, la muestra de carne se puede seleccionar dentro de la pieza de manera arbitraria o siguiendo algún criterio; en una realización, este criterio puede depender del resultado de alguno de los análisis anteriores, es decir, seleccionar la zona para extraer la muestra de la pieza de carne dependiendo del resultado del análisis de cuerpos extraños y/o del análisis de los resultados de parámetros/compuestos químicos (por ejemplo, se puede seleccionar una zona donde no hayan sido detectados cuerpos extraños) . En una realización, el realizar uno de los análisis puede depender del resultado de otro de los análisis. Por ejemplo, si se detectan patógenos, la pieza se desecha y ya no hace falta hacer el resto de análisis) . Siendo, en una realización, el orden prioritario de análisis detección de patógenos, detección de cuerpos extraños y análisis de características físicoquímicas. Resumiendo, la presente invención propone un método y sistema para la medida de características que permiten evaluar la calidad de la carne (parámetros de calidad) mediante tecnología de imagen hiperespectral. Estas características pueden ser parámetros/componentes químicos de interés industrial, detección de cuerpos extraños y presencia de microorganismos patógenos. La presente invención permite la determinación simultánea de multitud de parámetros (por ejemplo, la detección de cuerpos extraños y la determinación de varios componentes o parámetros químicos se puede hacer simultáneamente a partir de la misma imagen hiperespectral, o la detección de distintos tipos de microorganismos también se realiza simultáneamente a partir de la misma imagen hiperespectral tomada con lente microscópica) , en tiempo real y sobre toda la producción. A grandes rasgos, el procedimiento propuesto incluye la captura de las imágenes en una cinta de transporte industrial, el procesado de las imágenes, la aplicación de modelos (quimiométricos) para la predicción, la presentación al usuario y/o el almacenamiento de los esultados. También, la invención propuesta permite crear imágenes donde mediante mapas de color se exponen los resultados sobre toda la superficie de la muestra. Muchas realizaciones de las aquí presentadas se refieren a carne de vacuno y porcino, pero esto es solo un ejemplo, ya que el procedimiento y sistema propuesto se podría aplicar a cualquier otro tipo de carne o producto cárnico. En este texto, el término "comprende" y sus derivaciones (como "comprendiendo", etc.) no deben entenderse en un sentido excluyente, es decir, estos términos no deben interpretarse como excluyentes de la posibilidad de que lo que se describe y define pueda incluir más elementos, etapas, etc. Descrita suficientemente la naturaleza de la invención, así como la manera de realizarse en la práctica, hay que hacer constar la posibilidad de que sus diferentes partes podrán fabricarse en variedad de materiales, tamaños y formas, pudiendo igualmente introducirse en su constitución o procedimiento, aquellas variaciones que la práctica aconseje, siempre y cuando las mismas, no alteren el principio fundamental de la presente invención. La descripción y los dibujos simplemente ilustran los principios de la invención. Por lo tanto, debe apreciarse que los expertos en la técnica podrán concebir varias disposiciones que, aunque no se hayan descrito o mostrado explícitamente en este documento, representan los principios de la invención y están incluidas dentro de su alcance. Además, todos los ejemplos descritos en este documento se proporcionan principalmente por motivos pedagógicos para ayudar al lector a entender los principios de la invención y los conceptos aportados por el (los) inventor (es) para mejorar la técnica, y deben considerarse como no limitativos con respecto a tales ejemplos y condiciones descritos de manera específica. Además, todo lo expuesto en este documento relacionado con los principios, aspectos y realizaciones de la invención, así como los ejemplos específicos de los mismos, abarcan equivalencias de los mismos. Aunque la presente invención se ha descrito con referencia a realizaciones específicas, los expertos en la técnica deben entender que los anteriores y diversos otros cambios, omisiones y adiciones en la forma y el detalle de las mismas pueden realizarse sin apartarse del alcance de la invención tal como se definen mediante las reivindicaciones siguientes. ANEXOS. ANEXO 1: Funciones discriminantes para la detección de cuerpos extraños ANEXO 2: Coeficientes de regresión para el análisis cuantitativo ANEXO 3: Funciones discriminantes para la detección de salmonella
Publicaciones:
ES2957224 (15/01/2024) - A1 Solicitud de patente con informe sobre el estado de la técnica
Eventos:
En fecha 02/06/2022 se realizó Registro Instancia de Solicitud
En fecha 02/06/2022 se realizó Admisión a Trámite
En fecha 02/06/2022 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 06/06/2022 se realizó Superado examen de oficio
En fecha 14/11/2022 se realizó Realizado IET
En fecha 17/11/2022 se realizó 1109P_Comunicación Traslado del IET
En fecha 15/01/2024 se realizó Publicación Solicitud
En fecha 15/01/2024 se realizó Publicación Folleto Solicitud con IET (A1)
En fecha 07/05/2024 se realizó Validación petición y/o pago de examen sustantivo no conforme
En fecha 07/05/2024 se realizó Retirada
En fecha 07/05/2024 se realizó 1108P_Notificación retirada solicitud por no petición y/o pago de examen sustantivo
Pagos:
02/06/2022 - Pago Tasas IET
+ ES-2957224_A11. Método para la determinación de características de carne, que comprende los siguientes pasos: a1) Capturar con una cámara fija, usando una primera fuente de luz artificial, al menos una primera imagen hiperespectral de una pieza de carne, situada debajo de la primera fuente de luz artificial; y/o a2) Capturar con la cámara fija, usando una segunda fuente de luz artificial y una lente microscópica, al menos una segunda imagen hiperespectral de una muestra de la pieza de carne, estando la muestra situada encima de la segunda fuente de luz artificial; donde el método comprende además los siguientes pasos realizados por al menos un equipo electrónico de procesamiento: b) Si se ha realizado el paso a1) : b1) Recibir los datos de la al menos una imagen primera hiperespectral y a partir de ellos, seleccionar automáticamente aquellos píxeles pertenecientes a la imagen de la pieza de carne, aplicando un algoritmo de clasificación; b2) Para determinar la presencia de cuerpo extraños, comparar los datos obtenidos de la al menos una primera imagen hiperespectral para cada uno de los píxeles seleccionados en b1) y para cada longitud de onda del rango, con una firma espectral preestablecida para cada tipo de cuerpo extraño, donde la firma espectral de cada tipo de cuerpo extraño comprende un vector con el valor de reflectancia, para cada longitud de onda del rango, obtenido durante un proceso de entrenamiento previo, que corresponde a la presencia en carne de dicho tipo de cuerpo extraño; a partir de dicha comparación, determinar en cada uno de los pixeles seleccionados, si existe la presencia de un cuerpo extraño y el tipo de cuerpo extraño presente; b3) Para determinar uno o más parámetros y/o compuestos químicos, comparar los datos obtenidos de la al menos una primera imagen hiperespectral para cada uno de los píxeles seleccionados en b1) y para cada longitud de onda del rango, con una irma espectral preestablecida que corresponde a dicho parámetro o compuesto químico, donde la firma espectral de cada característica comprende un vector con el valor de reflectancia, para cada longitud de onda del rango, obtenido durante un proceso de entrenamiento previo, que corresponde a la presencia de dicho parámetro o compuesto químico en carne; a partir de dicha comparación, determinar la cantidad de cada uno de los parámetros y/o compuestos químicos en la pieza de carne en cada uno de los pixeles seleccionados. c) Si se ha realizado el paso a2) : c1) Recibir los datos de la al menos una segunda imagen hiperespectral y a partir de ellos, seleccionar automáticamente aquellos píxeles pertenecientes a la imagen de la muestra de carne, aplicando un algoritmo de clasificación; c2) Para determinar la presencia de microorganismos, comparar los datos obtenidos de la al menos una segunda imagen hiperespectral para cada uno de los píxeles seleccionados en c1) y para cada longitud de onda del rango, con una firma espectral preestablecida para cada tipo de microorganismo, donde la firma espectral de cada tipo de microorganismo comprende un vector con el valor de transmitancia, para cada longitud de onda del rango, obtenido durante un proceso de entrenamiento previo, que corresponde a la presencia en carne de dicho tipo de microorganismo; a partir de dicha comparación, determinar en cada uno de los pixeles seleccionados, si existe la presencia de un microorganismo y el tipo de microorganismo. 2. Método de acuerdo a una cualquiera de las reivindicaciones anteriores donde los parámetros y/o compuestos químicos comprenden uno o más de las siguientes: pH, humedad, color instrumental, grasa, perfil de ácidos grasos C14, C16, C17, C18 o C20, atocoferol y p-Y-tocoferoles. 3. Método de acuerdo a una cualquiera de las reivindicaciones anteriores donde los tipos de cuerpos extraños comprenden uno o más de las siguientes: ternilla, absceso, hueso, tendón, suciedad ruminal, carne encallada, coagulo, pelo, piel, callo, etiqueta y costilla. 4. Método de acuerdo a una cualquiera de las reivindicaciones anteriores donde los tipos de icroorganismos comprenden uno o más de las siguientes: Escherichia coli, Pseudomonas spp., Listeria monocytogenes, Enterobacter Cloacae, Salmonella, Staphylococcus Aureus o Lactobacillus. 5. Método de acuerdo a cualquiera de las reivindicaciones anteriores que, además comprende: - realizar una reconstrucción en el espectro visible, de la imagen de la pieza de carne; - para cada tipo de cuerpo extraño determinado en b2) , representar cada pixel seleccionado de la imagen en un color dependiendo de si se ha detectado dicho tipo de cuerpo extraño en el pixel; y/o - para cada parámetro y compuesto determinado en b3) , representar cada pixel seleccionado de la imagen en un color dependiendo de la cantidad de dicho parámetro o compuesto para cada pixel; y/o - para cada tipo de microorganismo determinado en c2) , representar cada pixel seleccionado de la imagen en un color dependiendo de si se ha detectado dicho tipo de cuerpo extraño en el pixel. 6. Método de acuerdo a cualquiera de las reivindicaciones anteriores donde las primera y segunda fuente de luz artificial, comprenden una o más lámparas halógenas de 35W de potencia con reflector dicroico. 7. Método de acuerdo a cualquiera de las reivindicaciones anteriores donde la primera fuente de luz artificial comprende varias lámparas halógenas de 35W de potencia con reflector dicroico de geometría semiesférica alineadas respecto a la horizontal, con un ángulo de inclinación respecto a la vertical de 30°. 8. Método de acuerdo a cualquiera de las reivindicaciones anteriores donde la segunda fuente de luz artificial comprende una fibra óptica configurada para iluminar la muestra de carne desde abajo. 9. Método de acuerdo a cualquiera de las reivindicaciones anteriores donde la muestra de carne se selecciona dentro de la pieza de carne dependiendo de los resultados obtenidos en b2) y b3) . 10. Método de acuerdo a cualquiera de las reivindicaciones anteriores donde la cámara está colocada de manera fija por encima de una cinta transportadora y la pieza de carne o la muestra de carne de la que la cámara captura la imagen, pasa por debajo de la cámara fija movida por la cinta transportadora. 11. Método de acuerdo a cualquiera de las reivindicaciones anteriores donde el rango del espectro en el que se recogen datos de la imagen hiperespectral es un rango de longitudes de onda entre 400 y 1000 nm. 12. Método de acuerdo a cualquiera de las reivindicaciones anteriores donde la selección de los pixeles se realiza mediante métodos de aprendizaje automáticos. 13. Método de acuerdo a cualquiera de las reivindicaciones anteriores donde el al menos un equipo electrónico y la cámara están separados y comunicados a través de una red de comunicación, y el al menos un equipo electrónico recibe los datos de las imágenes hiperespectrales capturadas, a través de la red de comunicación. 14. Sistema para la determinación de características de carne, que comprende: - Una cámara fija configurada para: - usando una primera fuente de luz artificial, capturar al menos una primera imagen hiperespectral de una pieza de carne, situada debajo de la primera fuente de luz artificial; y - usando una segunda fuente de luz artificial y una lente microscópica, capturar al menos una segunda imagen hiperespectral de una muestra de la pieza de carne, situada encima de la segunda fuente de luz artificial; - Al menos un equipo electrónico de procesamiento configurado para: - Aplicando un algoritmo de clasificación, a partir de los datos de la al menos una primera imagen hiperespectral, seleccionar automáticamente aquellos píxeles pertenecientes a la imagen de la pieza de carne y a partir de los datos de la al menos una segunda imagen hiperespectral, seleccionar automáticamente aquellos píxeles pertenecientes a la imagen de la muestra de carne; - Para determinar la presencia de cuerpos extraños, comparar los datos obtenidos de la al menos una primera imagen hiperespectral para cada uno de los píxeles seleccionados para cada longitud de onda del rango, con una firma espectral preestablecida para cada tipo de cuerpo extraño, donde la firma espectral de cada tipo de cuerpo extraño comprende un vector con el valor de reflectancia, para cada longitud de onda del rango, obtenido durante un proceso de entrenamiento previo, que corresponde a la presencia en carne de dicho tipo de cuerpo extraño; a partir de dicha comparación, determinar en cada uno de los pixeles seleccionados, si existe la presencia de un cuerpo extraño y el tipo de cuerpo extraño presente; - Para determinar parámetros y/o compuestos químicos, comparar los datos obtenidos de la al menos una primera imagen hiperespectral para cada uno de los píxeles seleccionados para cada longitud de onda del rango, con una firma espectral preestablecida que corresponde a dicho parámetro o compuesto químico, donde la firma espectral de cada característica comprende un vector con el valor de reflectancia, para cada longitud de onda del rango, obtenido durante un proceso de entrenamiento previo, que corresponde a la presencia de dicho parámetro o compuesto químico en carne; a partir de dicha comparación, determinar la cantidad de cada uno de los parámetros y/o compuestos químicos del grupo en la pieza de carne en cada uno de los pixeles seleccionados; - Para determinar la presencia de microorganismos, comparar los datos obtenidos de la al menos una segunda imagen hiperespectral para cada uno de los píxeles seleccionados para cada longitud de onda del rango, con una firma espectral preestablecida para cada tipo de microorganismo, donde la firma espectral de cada tipo de microorganismo comprende un vector con el valor de transmitancia, para cada longitud de onda del rango, obtenido durante un proceso de entrenamiento previo, que corresponde a la presencia en carne de dicho tipo de microorganismo; a partir de dicha comparación, determinar en cada uno de los pixeles seleccionados, si existe la presencia de un microorganismo y el tipo de microorganismo. 15. Programa de ordenador que comprende instrucciones ejecutables por ordenador para implementar el método según cualquiera de las reivindicaciones 1-13, al ejecutarse en un ordenador, un procesador digital de la señal, un circuito integrado específico de la aplicación, un microprocesador, un microcontrolador o cualquier otra forma de hardware programable.
Los productos y servicios protegidos por este registro son:
G01N 21/84 - G01N 21/25 - G06F 18/20
Descripciones:
+ ES-2957224_A1 Método y sistema mejorados para la evaluación de la calidad de carne mediante imágenes hiperespectrales CAMPO TÉCNICO DE LA INVENCIÓN La presente invención se refiere al campo de la monitorización de productos de la industria cárnica y más concretamente, a un método y sistema mejorados para la determinación de ciertas características de la carne (que permiten determinar su calidad) mediante captura, procesado y análisis de imágenes hiperespectrales. Esta determinación de características comprende, por ejemplo, la determinación cuantitativa de diversos parámetros o compuestos químicos de interés de la carne, detección de cuerpos extraños o detección de contaminantes microbianos. ANTECEDENTES DE LA INVENCIÓN El sector ganadero es uno de los que más está evolucionando. En lugar de pequeños productores, el comercio pasa a través de intermediarios que comercializan la carne a gran escala. Así, cooperativas ganaderas y otros grandes productores se enfrentan al gran reto de evaluar una gran cantidad de producción cárnica para cumplir, no solo las altas exigencias a nivel legislativo, sino también los altos estándares de calidad impuestos por los consumidores y por la alta competencia en el sector. Ello implica que hay que realizar diversas tareas de monitorización/evaluación de la carne a comercializar, de la manera más rápida, eficiente y precisa posible. Por ejemplo, por un lado, hay que analizar la composición química de las muestras de carne. Estos análisis son necesarios para conocer el estado de la carne desde un punto de vista nutricional y, al mismo tiempo, controlar el régimen de alimentación de los animales. También es necesario el análisis de posibles enfermedades zoonóticas, ya que estas enfermedades se pueden transmitir entre animales y seres humanos, por lo que su control estricto es imprescindible para la comercialización de carne de calidad. Estos análisis se realizan en laboratorios especializados que pueden ser de la propia empresa cárnica (si la empresa es suficientemente grande) o laboratorios externos a los que la empresa contrata estos ervicios, lo que conlleva un incremento del coste económico y en tiempo de la producción (Independientemente de quién se haga cargo de estos análisis, los tiempos necesarios para llevarlos a cabo son altos) . Además, como los análisis tradicionales son destructivos (es decir, la pieza de carne que se analiza no se puede después comercializar) , no es posible analizar el cien por cien de la producción, por lo que se realiza solamente en muestras representativas de cada lote. Por otra parte, los procesos de recogida, embolsado, etiquetado, transporte, así como el trabajo del personal especializado, no hacen más que añadir tiempo y coste a los análisis. Adicionalmente, el sector se enfrenta también a la posible presencia de cuerpos extraños en las muestras procesadas. Según su procedencia, se diferencian los inherentes del propio animal como pelos, suciedad ruminal, ternillas, huesos, entre otros; y también otros procedentes de la misma industria, como restos de guantes, etiquetas, cuerdas, etc. Como muchos de estos elementos son transparentes o tienen el mismo aspecto que la carne, muchas veces no es posible su detección mediante inspección visual de un operario o con cámaras tradicionales. A pesar del esfuerzo que realizan las empresas para evitar la presencia de estos componentes indeseables, muchos de ellos continúan en la carne hasta llegar al consumidor. En la actualidad, existen soluciones para la inspección de la calidad en la industria alimentaria basadas en técnicas ópticas. Dentro de éstas, los métodos espectroscópicos se caracterizan por una gran versatilidad. La medida de la interacción de la radiación electromagnética con la materia y la huella espectral que esta medida produce, ofrece una amplia gama de posibilidades para el análisis cualitativo y cuantitativo. La señal medida por esta tecnología no es absoluta, sino que son necesarias tareas de calibrado para establecer las relaciones que existen entre los parámetros que se quieren analizar y la información que proveen las técnicas ópticas. Para ello, se utiliza la quimiometría, que aúna la química, la espectroscopía y la estadística multivariante. La mejora en la instrumentación y los avances en la computación de gran cantidad de datos en tiempo real han permitido el desarrollo del análisis de imágenes hiperespectrales (HSI, del inglés "Hyperspectral Imaging") . Esta técnica une el análisis de imagen convencional y la espectroscopía. Una cámara hiperespectral adquiere imágenes hiperespectrales o hipercubos, estos hipercubos están formados por una batería de imágenes de una misma escena donde cada una representa numéricamente la reflectancia a una única longitud de onda, por lo que se puede conocer el perfil espectral de cualquiera de los puntos que componen dicha imagen. Así, se puede decir que los datos almacenados de imágenes espectrales tienen tres dimensiones, dos de ellas espaciales (x, y) y una espectral (la longitud de onda, A) . O, dicho de otra manera, se puede obtener el espectro completo de todos los puntos que contiene una imagen. La manera de adquirir una imagen tridimensional con el detector matricial de una cámara (bidimensional) es mediante un barrido de la muestra. Por ejemplo, con ayuda de la óptica adecuada y con un elemento dispersivo de la radiación, la cámara adquiere en cada instante una dimensión espacial (x) y la dimensión espectral (A) ; la dimensión espacial restante (y) se recopila haciendo un barrido sobre la muestra. En entornos industriales se pueden realizar las medidas sobre las cintas transportadoras que mueven la carne dentro de la cadena industrial. El movimiento que realizan las muestras en esta cinta satisface el movimiento necesario para hacer dicho barrido. La región del espectro utilizada no tiene por qué restringirse a la parte visible, sino que puede abarcar otras regiones, como, por ejemplo, aquellas que comprenden la zona del infrarrojo cercano (NIR, de las siglas en inglés de "Near InfraRed") , pudiendo diferenciar así componentes con composición química diferente incluso cuando su apariencia los hace indistinguibles. Una de las ventajas de las técnicas hiperespectrales radica en que se puede obtener el resultado del análisis en cada punto de la imagen y permite la creación de mapas donde se muestra en escalas de color la presencia o concentración de una determinada propiedad. Esta manera de exponer los resultados se conoce como "Chemical Imaging". Para el análisis químico de las muestras de carne no existen en la actualidad soluciones comerciales más allá del muestreo y posterior análisis químico convencional en laboratorios. Estos análisis están basados en métodos cromatográficos generalmente, que requieren largas y tediosas operaciones como muestreo, acondicionamiento de la muestra, extracción de compuestos, redisolución de componentes, separación cromatográfica, detección y cuantificación con bases de datos creadas para este fin. Todo ello implica también el uso de reactivos que generan residuos que hay que gestionar, repercutiendo en el coste. Los laboratorios microbiológicos son los que realizan el muestreo y el análisis de posibles gentes patógenos que produzcan enfermedades zoonóticas. A pequeña escala existen soluciones comerciales que pueden utilizarse por personal no especializado, aunque en cualquier caso son necesarios los procesos de muestreo y los análisis necesitan tiempos de incubación más o menos largos. Existen kits comerciales como RapidChek® SELECTTM, QFast® Salmonella, Reveal 2.0, MDS Salmonella 2 (3M) o PRImeDETECTTM. Son métodos que, a través de pequeñas placas de cultivo o tiras reactivas responden a la presencia de microorganismos dando un positivo en su caso. Su precisión es muy alta pero no son métodos automatizables y en ningún caso puede abarcar el análisis completo de la producción. A la vista de los retos a los que se enfrenta el sector, las pocas soluciones existentes y los problemas que presentan esas soluciones (como los mencionados en los párrafos anteriores) se observa la necesidad del desarrollo de un procedimiento rápido, efectivo, automatizable y preciso para realizar una determinación de las características de la carne (para evaluar su calidad y si cumple los requisitos exigidos) . Las técnicas de imagen y, en concreto, las hiperespectrales, han revolucionado la manera de evaluar la calidad en el sector alimentario (entre otras razones porque suponen procedimientos rápidos, nodestructivos y libres de reactivos químicos) , pero aún no se han desarrollado suficientemente para satisfacer estos problemas más allá de estudios pequeños a escala de laboratorio y no existen soluciones integrales óptimas para el análisis en el sector cárnico. SUMARIO DE LA INVENCIÓN La presente invención propone un procedimiento y sistema mejorados, basados en la tecnología de imágenes hiperespectrales, para la evaluación de la calidad de la carne, mediante la determinación (medida) de características de la misma; en concreto, el procedimiento y sistema propuestos permite determinar la concentración de diversos parámetros o compuestos presentes en la carne, detectar la presencia de cuerpos extraños en carne o detectar la infección por microorganismos (E.coli, S. aureus, Salmonella spp, Pseudomonas spp, Listeria, Enterobacter, Lactobacillus spp, entre otros) . Este procedimiento incluye la metodología para la captura óptima de las imágenes hiperespectales de la carne, el procesado de las imágenes y la obtención de resultados analíticos. También permite la creación de imágenes donde se muestran los resultados de nálisis cuantitativos y/u otra información de manera gráfica en mapas de color, para ayudar a la interpretación de los resultados. La obtención de las características de la carne se realizará a partir de la generación de firmas espectrales (que pueden incluir longitudes de onda fuera del intervalo visible del espectro) , extrayendo y definiendo aquellas firmas (patrones) espectrales que estén relacionadas con las diferentes características. A partir de un proceso de entrenamiento mediante aprendizaje automático, se han establecido las relaciones entre el perfil espectral y estas características. En el caso de la detección de microorganismos, se usa una lente microscópica que permite llevar a cabo dichos análisis. Para la detección de cuerpos extraños se podría usar también una lente microscópica (para cuerpos muy pequeños) , pero normalmente se usa una lente normal (macroscópica) para poder detectar cuerpos extraños en toda la pieza. Para ello, en el caso de detección de microrganismos, se ha entrenado el modelo de aprendizaje automático con una batería de muestras sanas y otra de muestras contaminadas de diferentes zonas de muestreo dentro del animal para conocer aquellas longitudes de onda implicadas en la detección, así como el peso de cada una de las variables en dicha detección. En el caso del análisis químico (para determinar cuantitativamente diversos parámetros y compuestos químicos) , el entrenamiento se ha realizado con un gran número de muestras con diferentes concentraciones de analito. De manera análoga, se han usado muestras que pertenecen a diferentes zonas de muestreo dentro de las piezas de carnes analizadas para hacerlo robusto. Por último y para la detección de cuerpos extraños, se ha recopilado una colección de muestras cuya presencia de estos cuerpos era conocida. Se han estudiado estos cuerpos desde un punto de vista espectroscópico y se ha entrenado un modelo de detección con el mismo fundamento matemático que el de los microorganismos. En todos estos casos, se han separado las muestras en dos sets en proporción 3:1 (esto es solo un ejemplo no limitativo y otras proporciones son posibles) . El set con mayor número de muestras se ha utilizado para realizar el entrenamiento y el set más pequeño se ha utilizado para realizar una validación externa. A partir de las firmas (patrones) espectrales definidas para cada característica, se estimarán las distintas características de la pieza de carne mediante la captura, procesado y análisis e imágenes espectrales de dicha pieza de carne. La monitorización (determinación/estimación de características) mediante el empleo de imágenes hiperespectrales permite la evaluación de la calidad de la carne de manera objetiva, con precisión y de manera rápida sin necesidad de manipulación de la carne (para el caso de detección de cuerpos extraños y análisis químico) . En una realización de la presente invención se utiliza el intervalo espectral más común en este tipo de instrumentación. Éste comprende el intervalo visible desde 400 nanómetros y alcanza el infrarrojo cercano hasta los 1000 nm. Este intervalo es muy útil, ya que es capaz de detectar los cambios en compuestos que afectan a la región visible, pero al mismo tiempo es capaz de considerar otros cambios que no tienen por qué repercutir en la apariencia de la pieza de carne. Esto es solo un ejemplo y en general se puede usar cualquier intervalo de longitudes de onda, preferiblemente abarcando parte del espectro no visible. Además, el procedimiento se realizará de manera automática. Es decir, el sistema propuesto capturará las imágenes de la pieza de carne, las procesará, determinará a partir de ellas las distintas características de la carne y almacenará los resultados y/o los presentará al usuario, por ejemplo, enviándolo a un dispositivo electrónico (por ejemplo, un móvil o tableta del usuario) o a través de un interfaz de usuario del propio sistema (por ejemplo, una pantalla) . Por lo que todo el procedimiento se realiza, sin requerir formación específica del usuario ni conocimiento de la tecnología que se aplica. Además, el procedimiento y sistema propuesto se puede usar en entornos industriales sin necesitar más modificaciones, añadiendo al sector una solución para estos problemas de índoles analíticas, higiénicas y sanitarias. Concretamente, la solución propuesta conlleva, entre otras, las siguientes ventajas: Evaluación de la calidad de la carne en tiempo real. Análisis no destructivo de las muestras. Análisis de componentes analíticos. Detección, identificación y cuantificación de microorganismos patógenos. Detección de cuerpos extraños. Reducción de costes y tiempos frente a la metodología tradicional. Y todo esto de manera automática, rápida y sencilla, y mejorando la exactitud, calidad, rapidez, seguridad, fiabilidad y costes en los procesos. En un primer aspecto, la presente invención propone un método para la determinación de características de carne (las características a determinar pueden comprender la presencia de cuerpos extraños y microorganismos patógenos de distintos tipos y la determinación de la cantidad de un grupo de parámetros y/o compuestos químicos) , donde el método comprende los siguientes pasos: a1) Capturar con una cámara fija, usando una primera fuente de luz artificial, al menos una primera imagen hiperespectral de una pieza de carne, situada debajo de la primera fuente de luz artificial (donde la cámara está situada encima de la pieza de carne y donde en dicha al menos una primera imagen hiperespectral, se obtienen datos de reflectancia de los píxeles de la imagen a distintas longitudes de onda de un rango del espectro) ; y/o a2) Capturar con la cámara fija, usando una segunda fuente de luz artificial y una lente microscópica (una lente de aumento) , al menos una segunda imagen hiperespectral de una muestra de la pieza de carne, estando la muestra situada encima de la segunda fuente de luz artificial (y donde en dicha al menos una segunda imagen hiperespectral, se obtienen datos de transmitancia de los píxeles de la imagen a distintas longitudes de onda de un rango del espectro; se le llama a ésta segunda imagen hiperespectral para distinguirla de la obtenida en a1) sin usar lente microscópica, pero no quiere decir que esta imagen de la muestra con lente microscópica se obtenga necesariamente después de la obtenida para la pieza de carne) ; donde el método comprende además los siguientes pasos realizados por al menos un equipo electrónico de procesamiento: b) Si se ha realizado el paso a1 (es decir, se ha capturado la primera imagen hiperespectral de la pieza de carne) : b1) Recibir los datos de la al menos una imagen primera hiperespectral y a partir de ellos, seleccionar automáticamente aquellos píxeles pertenecientes a la imagen de la pieza de carne, aplicando un algoritmo de clasificación; b2) Para determinar la presencia de cuerpo extraños, comparar los datos obtenidos de la al menos una primera imagen hiperespectral para cada uno de los píxeles seleccionados en b1) y para cada longitud de onda del rango, con una firma espectral preestablecida para cada tipo de cuerpo extraño, donde la firma espectral de cada tipo de cuerpo extraño comprende un vector con el valor de reflectancia, para cada longitud de onda del rango, obtenido durante un proceso de entrenamiento previo, que corresponde a la presencia en carne de dicho tipo de cuerpo extraño; a partir de dicha comparación, determinar en cada uno de los pixeles seleccionados, si existe la presencia de un cuerpo extraño y el tipo de cuerpo extraño presente; b3) Para determinar uno o más parámetros (físico o químicos) y/o compuestos químicos, comparar los datos obtenidos de la al menos una primera imagen hiperespectral para cada uno de los píxeles seleccionados en b1) y para cada longitud de onda del rango, con una firma espectral preestablecida que corresponde a dicho parámetro o compuesto químico, donde la firma espectral de cada característica comprende un vector con el valor de reflectancia, para cada longitud de onda del rango, obtenido durante un proceso de entrenamiento previo, que corresponde a la presencia de (una unidad de) dicho parámetro o compuesto químico en carne; a partir de dicha comparación, determinar la cantidad de cada uno de los parámetros y/o compuestos químicos en la pieza de carne en cada uno de los pixeles seleccionados. c) Si se ha realizado el paso a2) (es decir, se ha capturado la segunda imagen hiperespectral de la muestra de carne) : c1) Recibir los datos de al menos una segunda imagen hiperespectral y a partir de ellos, seleccionar automáticamente aquellos píxeles pertenecientes a la imagen de la muestra de carne, aplicando un algoritmo de clasificación; c2) Para determinar la presencia de microorganismos (patógenos) , comparar los datos obtenidos de al menos una segunda imagen hiperespectral para cada uno de los píxeles seleccionados en c1) y para cada longitud de onda del rango, con una firma espectral preestablecida para cada tipo de microorganismo, donde la firma espectral de cada tipo de microorganismo comprende un vector con el valor de ransmitancia, para cada longitud de onda del rango, obtenido durante un proceso de entrenamiento previo, que corresponde a la presencia en carne de dicho tipo de microorganismo; a partir de dicha comparación, determinar en cada uno de los pixeles seleccionados, si existe la presencia de un microorganismo y el tipo de microorganismo. Los parámetros (físico-químicos) y/o compuestos químicos pueden comprender uno o más de las siguientes: pH, humedad, color instrumental, grasa, perfil de ácidos grasos C14, C16, C17, C18 o C20, a-tocoferol y p-Y-tocoferoles. Los tipos de cuerpos extraños pueden comprender uno o más de las siguientes: ternilla, absceso, hueso, tendón, suciedad ruminal, carne encallada, coagulo, pelo, piel, callo, etiqueta y costilla. Los tipos de microorganismos pueden comprender uno o más de las siguientes: Escherichia coli, Pseudomonas spp., Listeria monocytogenes, Enterobacter Cloacae, Salmonella, Staphylococcus Aureus o Lactobacillus. En una realización el método además comprende: - realizar una reconstrucción en el espectro visible, de la imagen de la pieza de carne; - para cada tipo de cuerpo extraño determinado en b2) , representar cada pixel seleccionado de la imagen en un color dependiendo de si se ha detectado dicho tipo de cuerpo extraño en el pixel; y/o - para cada parámetro y compuesto determinado en b3) , representar cada pixel seleccionado de la imagen en un color dependiendo de la cantidad de dicha característica determinada para cada pixel; y/o - para cada tipo de microorganismo determinado en c2) , representar cada pixel seleccionado de la imagen en un color dependiendo de si se ha detectado dicho tipo de cuerpo extraño en el pixel. Las primera y segunda fuente de luz artificial pueden comprender una o más lámparas halógenas de 35W de potencia con reflector dicroico. En concreto, la primera fuente de luz artificial puede comprender varias lámparas (por ejemplo 3) halógenas de 35W de potencia con reflector dicroico de geometría semiesférica alineadas respecto a la horizontal, con un ángulo de inclinación respecto a la vertical de 30°. Y la segunda fuente de luz artificial puede comprender una fibra óptica que ilumina la muestra de carne desde abajo. En una realización, la muestra de carne se selecciona dependiendo de los resultados obtenidos en b2) y b3) , es decir, dependiendo de los cuerpos extraños, parámetros y compuestos detectados y su ubicación. En una realización, la cámara está colocada de manera fija por encima de una cinta transportadora y la pieza de carne o la muestra de carne de la que la cámara captura la imagen, pasa por debajo de la cámara fija movida por la cinta transportadora. En una realización, el rango del espectro en el que se recogen datos de la imagen hiperespectral es un rango de longitudes de onda entre 400 y 1000 nm. El al menos un equipo electrónico y la cámara pueden estar juntos o separados y comunicados a través de una red de comunicación, y en este último caso, al menos un equipo electrónico recibe los datos de al menos una (primera y/o segunda) imagen hiperespectral capturada, a través de la red de comunicación. En un segundo aspecto, la presente invención propone un sistema que lleve a cabo los métodos anteriormente citados. En concreto, propone un sistema para la determinación de características de carne (las características a determinar pueden comprender la presencia de cuerpos extraños y microorganismos patógenos de distintos tipos y la determinación de la cantidad de un grupo de parámetros y/o compuestos químicos) donde el sistema comprende: - Una cámara fija configurada para: - usando una primera fuente de luz artificial, capturar al menos una primera imagen hiperespectral de una pieza de carne, situada debajo de la primera fuente de luz artificial; y/o - usando una segunda fuente de luz artificial y una lente microscópica, capturar al menos una segunda imagen hiperespectral de una muestra de la pieza de carne, situada encima de la segunda fuente de luz artificial; - Al menos un equipo electrónico de procesamiento configurado para: - Aplicando un algoritmo de clasificación, a partir de los datos de la al menos una rimera imagen hiperespectral, seleccionar automáticamente aquellos píxeles pertenecientes a la imagen de la pieza de carne y/o a partir de los datos de la al menos una segunda imagen hiperespectral, seleccionar automáticamente aquellos píxeles pertenecientes a la imagen de la muestra de carne; - Para determinar la presencia de cuerpos extraños, comparar los datos obtenidos de la al menos una primera imagen hiperespectral para cada uno de los píxeles seleccionados y para cada longitud de onda del rango, con una firma espectral preestablecida para cada tipo de cuerpo extraño, donde la firma espectral de cada tipo de cuerpo extraño comprende un vector con el valor de reflectancia, para cada longitud de onda del rango, obtenido durante un proceso de entrenamiento previo, que corresponde a la presencia en carne de dicho tipo de cuerpo extraño; a partir de dicha comparación, determinar en cada uno de los pixeles seleccionados, si existe la presencia de un cuerpo extraño y el tipo de cuerpo extraño presente; - Para determinar parámetros y/o compuestos químicos, comparar los datos obtenidos de la al menos una primera imagen hiperespectral para cada uno de los píxeles seleccionados y para cada longitud de onda del rango, con una firma espectral preestablecida que corresponde a dicho parámetro o compuesto químico, donde la firma espectral de cada característica comprende un vector con el valor de reflectancia, para cada longitud de onda del rango, obtenido durante un proceso de entrenamiento previo, que corresponde a la presencia de dicho parámetro o compuesto químico en carne; a partir de dicha comparación, determinar la cantidad de cada uno de los parámetros y/o compuestos químicos del grupo en la pieza de carne en cada uno de los pixeles seleccionados; - Para determinar la presencia de microorganismos, comparar los datos obtenidos de la al menos una segunda imagen hiperespectral para cada uno de los píxeles seleccionados y para cada longitud de onda del rango, con una firma espectral preestablecida para cada tipo de microorganismo, donde la firma espectral de cada tipo de microorganismo comprende un vector con el valor de transmitancia, para cada longitud de onda del rango, obtenido durante un proceso de entrenamiento previo, que corresponde a la presencia en carne de dicho tipo de microorganismo; a partir de dicha comparación, determinar en cada uno de los pixeles seleccionados, si xiste la presencia de un microorganismo y el tipo de microorganismo. Finalmente, se presenta un programa de ordenador que comprende instrucciones ejecutables para implementar el método descrito, al ejecutarse en un ordenador, un procesador digital de la señal, un circuito integrado específico de la aplicación, un microprocesador, un microcontrolador o cualquier otra forma de hardware programable. Dichas instrucciones pueden estar almacenadas en un medio de almacenamiento de datos digitales. Para un entendimiento más completo de estos y otros aspectos de la invención, sus objetos y ventajas, puede tenerse referencia a la siguiente memoria descriptiva y a las figuras adjuntas. DESCRIPCIÓN DE LAS FIGURAS Para complementar la descripción que se está realizando y con objeto de ayudar a una mejor comprensión de las características de la invención, de acuerdo con unos ejemplos preferentes de realizaciones prácticas de la misma, se acompaña como parte integrante de esta descripción un juego de dibujos en donde, con carácter ilustrativo y no limitativo, se ha representado lo siguiente: La Figura 1 muestra de manera esquemática el sistema propuesto en funcionamiento de acuerdo con una realización de la invención, para el análisis macroscópico. La Figura 2 muestra de manera esquemática el sistema propuesto en funcionamiento de acuerdo con una realización de la invención, para el análisis microscópico. DESCRIPCIÓN DETALLADA DE LA INVENCIÓN La presente invención propone un método y sistema mejorado e integral de obtención (determinación) de manera automática, de diversas características de una pieza o trozo de carne (que puede ser una pieza completa de carne, una porción de la misma o una muestra extraída de la misma como veremos a continuación) a partir de imágenes hiperespectrales. Este método y sistema permite adquirir y procesar imágenes hiperespectrales (por ejemplo, en una línea de inspección) en tiempo real. Mediante el procesado de las imágenes adquiridas, la invención propuesta permite identificar de manera automática la carne a analizar dentro de la imagen tomada. Y a partir de esta identificación y aplicando modelos matemáticos a los datos hiperespectrales obtenidos, permite la obtención simultánea de las siguientes características de la carne: presencia de cuerpos extraños en la pieza de carne y cantidad de distintos parámetros químicos o compuestos de interés en la pieza de carne mediante el análisis de una misma imagen hiperespectral. Además, también permite la detección simultánea de varios tipos de microorganismos patógenos, mediante el análisis de una misma imagen hiperespectral (diferente a la imagen que se usa para detección del resto de características, ya que como se explicará a continuación para la detección de microorganismos se necesita una imagen capturada de manera distinta que para la detección de las otras características) . Como se obtienen a la vez numerosas características de la carne, se puede decir que la presente invención permite una detección multiparamétrica. Además, se puede almacenar y presentar la información obtenida (resultados obtenidos) sobre la pieza de carne al usuario, por ejemplo, mediante un display en el mismo sistema o enviándole la información a dispositivo electrónico del usuario (teléfono móvil, PC, tableta, portátil o cualquier otro tipo de dispositivo electrónico) . También el sistema propuesto puede permitir el almacenamiento histórico de la información obtenida de cada pieza y la creación de informes automáticos de resultados. Los parámetros físico-químicos o compuestos que se pueden determinar son de cualquier tipo, por ejemplo (esto es una lista no limitativa) : pH, Humedad, color instrumental, grasa y perfil de ácidos grasos (C14, C16, C17, C18 y C20) , a-tocoferol, p-Y-tocoferoles, neofitadieno, trioleína o cualquier otro. En general, se puede decir que se puede obtener mediante este procedimiento cualquier parámetro físico o químico de la carne (y en especial aquellos que determinan su calidad) . El sistema propuesto constará de un dispositivo que se usa para adquirir las imágenes hiperespectrales (llamada cámara hiperespectral o sensor hiperespectral) , que puede ser de cualquier tipo conocido. Dicha cámara obtendrá imágenes de xxy píxeles (donde x es el número de filas de pixeles e y el número de columnas de pixeles, por ejemplo, 512x512 ixeles, aunque cualquier otro número de píxeles es posible) . Así el espectro electromagnético que se mide es de 400 a 1000 nm, el cual está formado por 170 longitudes de ondas distintas (si la resolución espectral aproximada es de 3, 5 nm; esto es un ejemplo no limitativo y otras resoluciones espectrales son posibles) . Estas 170 longitudes de ondas son seleccionadas a partir de un filtrado del espectro en continuo completo. La cámara puede usar una lente común (a la que llamaremos lente macroscópica) para determinar los parámetros físico-químicos de la muestra y detectar los cuerpos extraños y una lente microscópica para detectar los microorganismos. Los términos macroscópico y microscópico se usan para referirse a dos escalas diferentes que son útiles para determinar el tamaño de diferentes compuestos: Así, las partículas o sustancias macroscópicas son lo suficientemente grandes como para ser observadas a simple vista sin ningún instrumento de aumento. Por el contrario, las partículas o sustancias microscópicas son demasiado pequeñas como para ser observadas a simple vista; por lo tanto, se necesitará un instrumento de aumento, como una lente microscópica para examinar los diferentes tipos de microorganismos. Es decir, la lente macroscópica no se utiliza para una visión aumentada de las muestras ya que principalmente sirve para enfocar, no para aumentar, mientras que la lente microscópica tendrá un aumento considerable para permitir detectar los microorganismos que no son visibles a simple vista. Para la detección de cuerpos extraños pequeños se realiza dicha detección a partir de la imagen obtenida con la lente común (macroscópica) . En una realización, la cámara será una cámara hiperespectral lineal capaz de medir la reflectancia en el espectro electromagnético desde 400 a 1000 nm (esto es un ejemplo no limitativo y en otras realizaciones el intervalo espectral puede ser cualquier otro) . En una realización, la resolución espacial es igual o superior a 4 píxeles/mm para la lente macroscópica y 50 píxeles/mm para la lente microscópica (esto es un ejemplo no limitativo y en otras realizaciones la resolución puede ser cualquier otra) . Para realizar todo el procesado que se explicará a continuación, el sistema constará de un equipo electrónico de procesamiento (también llamado simplemente unidad, equipo, módulo o dispositivo de procesamiento o más simplemente procesador) que recibe las imágenes capturadas y las procesa para obtener las características deseadas (aunque por simplicidad, hablamos de un equipo de procesamiento puede haber una sola unidad que realiza todo el rocesado o haber varias unidades, cada una de las cuales realizar alguna de las acciones del procesado) . El equipo de procesamiento puede mostrar los resultados al usuario (mediante un interfaz de usuario como por ejemplo una pantalla) y/o puede enviar los resultados obtenidos a un dispositivo electrónico del usuario (por ejemplo, un teléfono móvil, un ordenador, etc.) a través de una red de comunicación sin hilo, de telefonía móvil, red cableada o de cualquier tipo. El dispositivo electrónico del usuario y/o el equipo de procesamiento pueden almacenar los resultados numéricos (valores de los parámetros obtenidos) e incluso los posibles mapas de color generados, en archivos que podrán ser procesados en masa posteriormente. El equipo electrónico de procesamiento puede estar conectado a la cámara directa o indirectamente mediante cualquier tipo de red de comunicación (cableada o sin hilo, red de telefonía móvil, etc) usando cualquier tipo de tecnología, como Bluetooth, telefonía móvil o cualquier otra. Es decir, el equipo electrónico y la cámara forman parte del mismo dispositivo o están separados y comunicados a través de una red de comunicación y en este segundo caso, el equipo electrónico recibe la imagen hiperespectral capturada a través de la red de comunicación Asimismo, en una realización, no es necesaria una conexión permanente entre la cámara y el equipo informático. La cámara podrá disponer de una unidad de almacenamiento de las imágenes, que permitirá su procesado posterior al transferir (descargar) la información al equipo electrónico de procesamiento correspondiente. Por otro lado, la cámara y el equipo electrónico de procesamiento pueden estar separados, pero también pueden estar dentro de la misma carcasa formando parte del mismo equipo (es decir, un mismo equipo captura las imágenes y las procesa para obtener los resultados) . O haber varios equipos de procesamiento algunos de las cuales están incorporados en la cámara y otras separados de ella (o en otras palabras, la cámara puede realizar además de la captura, algunas de las acciones para el procesado de imágenes) . En la figura 1 se muestra, de manera esquemática, el sistema propuesto (de acuerdo con una realización de la invención) , cuando se usa una lente macroscópica (por ejemplo, para la obtención de los parámetros y compuestos químicos) . En esta figura se muestra la cinta transportadora (1a) , la cámara hiperespectral (1b) , el sistema de iluminación (1c) y el aterial para calibración (1d) . Por otro lado, en la figura 2 se muestra, de manera esquemática, el sistema propuesto (de acuerdo a una realización de la invención) , cuando se usa una lente microscópica (por ejemplo para la detección de microrganismos patógenos) . En esta figura se muestra la cinta transportadora (2a) , la cámara hiperespectral (2b) , la lente microscópica (2c) , el sistema de iluminación (2d) , la base rectangular de análisis de muestras (2e) y el regulador del sistema de iluminación (2f) . En las realizaciones que se muestran a continuación (y en las figuras 1 y 2) , la adquisición de las imágenes está concebida sobre una cinta transportadora (1a, 2a) por donde pasarán de manera continua las piezas de carne (para así poder analizar rápidamente una gran cantidad de piezas, incluso la totalidad de la producción si se desea) . De manera que la cámara hiperespectral está colocada de manera fija (sin moverse) y por la cinta transportadora pasa la carne a fotografiar por debajo de la cámara. Pero eso es solo un ejemplo, y en otras realizaciones se puede realizar la adquisición de imágenes hiperespectrales de las piezas de carne en cualquier otra forma y cualquier otro lugar (por ejemplo, pasando las piezas una a una por la cámara hiperespectral fija manualmente...) . Hay que decir que, en el caso del análisis microscópico, la velocidad de la cinta transportadora normalmente tiene que ser mucho menor que para el caso macroscópico, ya que la muestra debe pasarse a una velocidad lenta para que la imagen microscópica se puede tomar adecuadamente. En el procedimiento propuesto se distinguen tres etapas principales, adquisición (captura) de la imagen (realizada en la cámara) , procesado de la imagen y obtención de resultados (el procesado y la obtención de resultados se realiza en uno o varios equipos de procesamiento) . Después los resultados obtenidos se pueden presentar al usuario de distintas formas. Cada una de estas etapas podrá tener a su vez distintos pasos o acciones. Adquisición de la imagen (esto es solo un ejemplo de las acciones a realizar y no todas son esenciales y, por lo tanto, necesarias para el procedimiento propuesto) : Preferentemente, la cámara (1b, 2b) se coloca con la óptica en dirección vertical (perpendicular al plano donde se coloca la pieza de carne) y visualizando la muestra perpendicularmente a una altura h respecto de la muestra, de modo que la longitud L (que se corresponde con la extensión de muestra o pieza de carne a analizar determinada en función del objeto de estudio) será proporcional a h según la razón L = 2 - h- tg ( ^ ) , siendo y el ángulo de visión de la óptica. En ambos casos, la cámara hiperespectral (1b, 2b) permite obtener los espectros para cada pixel de la imagen. En el caso de la figura 1, se usa una lente macroscópica que permite analizar las características fisicoquímicas de la muestra (y los cuerpos extraños) y, en la Figura 2, se usa una lente microscópica (2c) para poder visualizar los microorganismos. En el caso macroscópico, la cámara debe colocarse a una distancia compatible con la distancia de trabajo de la óptica empleada por la cámara. La resolución espacial del sensor de la cámara junto con las características específicas de la óptica conlleva el uso de distancias de trabajo concretas para la obtención de una definición suficiente, que se ajustará a las características de la muestra a analizar. Por ejemplo, la relación entre la distancia a la que se coloca la cámara de la carne a analizar, puede venir dada según la relación donde R (px/mm) es la resolución en píxeles por milímetro y d es la distancia medida entre la carne y la óptica de la cámara (esto es solo un ejemplo, y se pueden emplear otras fórmulas para obtener la relación entre la resolución y la distancia) ; esta distancia ha de encontrarse dentro del rango de distancias en que la óptica es capaz de enfocar correctamente. La proporción 1, 024 está calculada específicamente para la cámara empleada en el presente ejemplo (donde la resolución espacial es de 512 x 512 píxeles) . En general, se puede decir que la distancia entre la cámara y las muestras dependerá de factores como el tamaño de la muestra, la resolución espacial del sensor de la cámara, la óptica empleada y la iluminación. En una realización, como iluminación (1c) se utilizarán, cuando se usan lentes macroscópicas, 3 lámparas halógenas de 35W de potencia con reflector dicroico de geometría semiesférica alineadas respecto a la horizontal, con un ángulo de inclinación respecto a la vertical de 30° (ver figura 1) . Esto es solo un ejemplo no limitativo y en otras realizaciones se pueden usar otro tipo de lámparas alineadas o no, y con otros ángulos respecto a la vertical. Como fuente de iluminación alternativa en el caso de realizar determinaciones microscópicas (figura 2) , en una realización se propone el empleo de un iluminador que porta una lámpara halógena dicroica de 35W que proyecta luz hacia un conductor de fibra óptica cuyo terminal conforma un hueco rectangular de 1 cm de largo por 1 mm de ancho sobre la que se sitúa la muestra (2d) (esto es solo un ejemplo no limitativo y en otras realizaciones, el hueco puede tener otras dimensiones y usarse otro tipo de lámparas) . A su vez este hueco forma parte de una base rectangular sobre la que se sitúa la muestra (2e) . Esta fuente de iluminación es regulable (2f) para obtener el nivel de intensidad deseado, siendo el nivel óptimo aquel que permite la transmisión de la luz aceptable para la obtención de las imágenes hiperespectrales a través de la lente microscópica. Es decir, en el caso de análisis macroscópico, la carne se ilumina desde arriba, la luz se refleja en la carne y la cámara recoge medidas de reflectancia (a las distintas longitudes de onda) . En el caso de análisis microscópico, la fuente de luz está debajo de la muestra de carne por lo que la luz atraviesa la carne y se puede decir que la cámara recoge medidas de transmitancia (a las distintas longitudes de onda) . Hay que decir también que en el caso de análisis macroscópico se puede analizar toda la pieza de carne (como se ve en la figura 1) , mientras que en el análisis microscópico no se analiza toda la pieza de carne sino una muestra que se extrae de la pieza de carne. En un ejemplo no limitativo dicha muestra es de 25 cm2 de superficie y 1mm de espesor. Esta muestra se puede escoger al azar o atendiendo a determinados criterios; en una realización, la localización de esta muestra en la pieza de carne se selecciona dependiendo de los resultados del análisis de parámetros físico-químicos y compuestos químicos y/o del resultado de la detección de cuerpos extraños previamente realizado sobre todo la pieza. En una realización, la integración del objetivo microscópico de 40 aumentos en este caso (esto es un ejemplo no limitativo y se pueden usar otros aumentos) en la cámara hiperespectral conllevó el diseño de un adaptador específico para su adaptación a la montura C. Siendo ésta la montura más estándar para las cámaras CCD y CMOS para aplicaciones industriales y científicas, se empleó esta montura para poder replicar en el futuro este equipamiento en otras instalaciones (aunque esto es un ejemplo no limitativo y en otras realizaciones se pueden usar otro tipo de monturas) . El mecanismo roscado permite optimizar y adecuar la distancia de trabajo, que para esta óptica se suele situar entre 0, 5 y 1 mm de la muestra a observar. Soliendo ser el aumento de la lente microscópica (2c) mayor o igual a 40 veces el tamaño de la muestra. La magnificación de una óptica es la relación entre el tamaño de la imagen y el tamaño del objeto, cuyas características dependen de la óptica y de la distancia al objeto. En esta aplicación de visión artificial hay que tener en cuenta que la magnificación está relacionada con el tamaño del sensor, por lo que es fundamental conocer el equipo sobre el que se instala para poder optimizar la distancia al objeto de estudio. Teniendo en cuenta todos estos aspectos, la metodología propuesta preferentemente incluye una calibración de la iluminación al principio de la sesión de adquisición, lo que lo hace robusto a cambios en las condiciones de adquisición. La calibración se puede realizar midiendo el espectro de reflectancia de un material de referencia, que se usa para las medidas de reflectancia; el espectro de este material es estable en el tiempo, por lo que el perfil espectral de las muestras se mide de manera relativa a este material, eliminando la dependencia con las condiciones ambientales y con el mismo tamaño que la línea de inspección de la cámara. La línea de inspección es todo el campo de visión que la cámara permite ver en cada toma de una imagen hiperespectral. De tal manera que la construcción de una imagen se realiza línea a línea, de forma que el objeto se desplaza con respecto a la cámara. Siendo el tamaño de las imágenes capturadas tan ancho como el de la línea de inspección (por ejemplo, en una realización este ancho podría ser de entre 64 y16.000 pixeles, tal como proporciona el fabricante) y tan largo como requiera la muestra a analizar. La calibración solo es necesaria al principio de la sesión, por lo que el material de referencia (1d) sería usado sólo en la primera toma de imágenes. Análogamente, se puede tomar una imagen del ruido de fondo con el fin de normalizar las imágenes obtenidas. En ambos casos (macroscópico y microscópico) se sigue el mismo proceso. Una vez que el sistema está calibrado, tanto para la lente macroscópica cómo microscópica no es necesario volver a calibrar. En otras palabras, una vez se ha colocado la cámara (a la orientación, distancia y condiciones de iluminación adecuadas) preferentemente se produce la calibración de la magen. Para ello, por ejemplo, se coloca un elemento válido para la calibración (como por ejemplo, un marco de calibración) orientado hacia la cámara y junto al objeto cuya imagen se quiere capturar y se realiza la calibración de la cámara (mediante la opción correspondiente en la cámara o posteriormente durante el procesado de la imagen) . El marco de calibración consiste en una figura geométrica (por ejemplo, en forma de marco cuadrado) , de un área suficientemente amplia como para quedar representada en la imagen por un conjunto de píxeles suficiente para la ejecución de la normalización, que sirve de referencia de blancos al estar compuesto por un material que consta de una reflectancia máxima en todo el rango espectral, por lo que estará fabricado preferentemente de PTFE (politetrafluoroetileno) . En el caso de análisis microscópico, la calibración se puede realizar midiendo el espectro de transmitancia de un material de referencia, que se usa de referencia para las medidas de transmitancia. En la anterior explicación se ha tratado primero la adquisición de una imagen usando lente macroscópica y después la adquisición de una imagen usando lente microscópica; pero esto es solo una forma de exponerlo y no quiere decir, de ningún modo, que para obtener las imágenes haya que seguir siempre ese orden; es decir, se puede obtener primero una o más imágenes usando lente microscópica (figura 2) y después una o más imágenes usando lente macroscópica (figura 1) , o viceversa. -A continuación, se realiza la captura de una muestra de carne que se quiere analizar. Procesado de la imagen (esto es solo un ejemplo de las acciones a realizar y no todas son esenciales y, por lo tanto, necesarias para el procedimiento propuesto) : - Como hemos indicado, aunque se habla de "imagen" hiperespectral, en verdad, lo que se obtiene es una batería de imágenes de una misma escena (de un mismo objeto) donde cada una representa la reflectancia (o transmitancia, dependiendo de donde se encuentre la fuente de luz respecto al cuerpo del que se captura la imagen) a una longitud de onda del espectro. Por lo que al final, lo que se obtiene de la cámara hiperespectral es una matriz de tres dimensiones (llamada hipercubo) con la medida de la reflectancia (o transmitancia) de cada punto de la imagen (pixel) a cada longitud de onda. En una realización, para su procesado, lo primero que se hace es la conversión de dicha matriz de tres dimensiones o hipercubo a una matriz plana (bidimensional) este proceso se llama desplegamiento o más conocido por su término en inglés, "unfolding". En el ejemplo citado anteriormente donde las imágenes son de xxy pixeles y se capturan datos en, por ejemplo, 170 longitudes de onda distintas (este número viene determinado por el filtrado de longitudes de ondas que se realiza sobre el espectro electromagnético en continuo) las dimensiones de la matriz pasan de ser de xxyx 170 (tridimensional) a x y x 170 (bidimensional) . - Segmentación de la imagen. En este proceso se procede a la identificación de los píxeles que corresponden a la región de interés. La región de interés será la (pieza de) carne que se quiere analizar que, como se ha indicado, puede ser una pieza entera de carne, un fragmento o una muestra de la misma. En primer lugar, se puede llevar a cabo un proceso de normalización usando para ello las imágenes de calibración y de ruido de fondo. Seguidamente se lleva a cabo el proceso de preprocesado de las imágenes, para ello se pueden usar herramientas de preprocesado clásicas como son la primera y la segunda derivada, el SNV (Standard Normal Variate) o el Smoothing. Una vez se ha realizado el preprocesado se lleva a cabo la segmentación propiamente dicha o "masking". Para ello cada uno de los pixeles se evalúa mediante un clasificador que decide si pertenece o no a la región de interés (carne a analizar) . Esta clasificación es multivariante e influyen en diferente medida las longitudes de onda disponibles para cada uno de los puntos de la imagen (170 en este caso de ejemplo) . Este clasificador puede utilizar cualquier herramienta conocida (por ejemplo, máquina de vectores de soporte, del inglés "Support Vector Machine, en inteligencia artificial) , normalmente basadas en un entrenamiento (previo) donde se definen las características de los pixeles que pertenecen a la muestra. El resultado es un vector de longitud igual al número de píxeles (xxy) , donde en cada uno se indica con 0 o 1 la pertenencia a la región de interés. La suma de este vector son el número de píxeles (F) donde hay muestra en la imagen. Este vector puede replegarse a las dimensiones espaciales del hipercubo. El resultado es una matriz plana (xxy) donde se muestran estas regiones en el hipercubo. En una realización a modo de ejemplo no limitativo, el clasificador usado para identificar los pixeles que pertenecen a la región de interés se basa en la búsqueda de hiperplanos que separan las muestras utilizando el espectro completo como variables independientes. La clasificación se realiza a partir de unas imágenes utilizadas ara el entrenamiento del algoritmo de clasificación que, una vez puesto a punto, es verificado al comprobar su idoneidad con muestras externas. Durante la puesta a punto de la solución propuesta, los modelos matemáticos de clasificación usados preferentemente son verificados con decenas de imágenes disponibles, para asegurar que son lo más exactos posibles. - A continuación, se pueden recopilar los espectros de los píxeles seleccionados, es decir, los pixeles que pertenecen a la región de interés (carne a analizar) a los que se le ha asignado un 1 en la clasificación realizada anteriormente. También se recopilan las coordenadas (x, y) de estos puntos (pixeles) en la imagen. El resultado es un espectro individual para cada uno de los F píxeles de región de interés (cada espectro individual tendrá los valores de reflectancia/transmitancia para cada una de las longitudes de onda tratadas, 170 en el ejemplo usado anteriormente) ; estos serían los espectros de interés. También se obtendría una matriz con las coordenadas x, y de cada uno de los espectros de interés, o en otras palabras con las coordenadas de cada pixel que pertenece a la región de interés (carne a analizar) . También se puede obtener una imagen RGB que muestra en color la imagen de la región de interés. La información que se obtiene a partir de la adquisición y procesado sirve como punto de partida para el resto de los análisis a realizar para obtener los resultados, es decir, las características deseadas de la muestra de carne. En la siguiente explicación se van a detallar los análisis, para obtener distintas características, en un cierto orden; pero esto es solo una forma de explicarlo y no quiere decir, de ningún modo, que el análisis se tenga que realizar necesariamente en ese orden ni siquiera que se tenga que hacer uno después de otro, ya que se pueden realizar dichos análisis simultáneamente. Análisis de cuerpos extraños: Mediante este análisis se detectan e identifican posibles cuerpos extraños que haya en la porción de carne de interés. En general, este análisis se extenderá a toda la pieza de carne a comercializar para asegurar que no se encuentran cuerpos extraños en la misma. Algunos de los cuerpos blandos extraños a identificar pueden ser, por ejemplo, temilla, absceso, hueso, tendón, suciedad ruminal, carne encallada, coágulo, pelo, piel, callo, etiqueta y costillas; pero esta técnica se puede aplicar a cualquier otro tipo de elementos extraños que se desee. Los espectros de las zonas seleccionadas en la segmentación son almacenados en una matriz plana de n píxeles x 170 longitudes de onda (en el caso del ejemplo, donde se miden reflectancias para 170 longitudes de onda) . En una realización se usa una técnica de clasificación de análisis lineal discriminante (esto es solo un ejemplo no limitativo y se puede usar cualquier otra técnica de clasificación conocida) . Este análisis lineal discriminante es un método de clasificación basado en unas categorías que han sido previamente descritas y calculadas, a las cuales se les ha asignado para cada longitud de onda un coeficiente que permite identificarlas. Estos coeficientes es lo que se conoce como función discriminante. En el anexo 1, se encuentran las funciones discriminantes (coeficientes) para la determinación de cuerpos extraños obtenidas de acuerdo a una realización de la invención (esto es solo un ejemplo y en otras realizaciones se pueden obtener y usar otros valores para los coeficientes) . Se tendrá un coeficiente para cada una de las bandas electromagnéticas (170 en el caso de ejemplo) y para cada tipo de cuerpo extraño a detectar. Para obtener estos valores previos de la función discriminante para cada categoría de cuerpo extraño (como los mostrados en el anexo 1) , en un proceso de entrenamiento previo (usando por ejemplo técnicas de inteligencia artificial como "machine leaming") se ha obtenido la firma espectral (también llamada patrón espectral) que caracteriza cada tipo de cuerpo extraño. Es decir, se han capturado imágenes espectrales de prueba de distintas muestras en los en los que sí se conocía la presencia de cuerpo extraños, su tipo y ubicación y, a partir de ahí, se ha obtenido el valor en cada una de las longitudes de onda de los coeficientes que identifica la presencia de cada tipo de cuerpo extraño. Los perfiles espectrales de cada uno de los cuerpos extraños fueron definidos previamente de manera individual y posteriormente testados sobre diferentes matrices cárnicas con el fin de poder identificarlos. Para la detección, cada espectro de la muestra se multiplica elemento a elemento con los oeficientes de la función discriminante, se suman los resultados y se añade el término independiente. Así, se obtiene un valor para cada cuerpo extraño, asignando a cada píxel la categoría (el cuerpo extraño) cuya función discriminante haya dado un valor más alto. Como se asigna una categoría siempre y lo normal es que no haya ningún tipo de contaminación, los espectros de carne sana y sin contaminar también se añaden en los modelos. En el anexo 1, por ejemplo, la categoría "carne" indica carne sana (en el sentido de que esos píxeles no presentan ningún tipo de cuerpo extraño) y la categoría "fondo" se asigna a aquellos píxeles de la imagen que no pertenecen a una muestra cárnica (es decir, no son parte de la pieza de carne sino del fondo de la imagen) . Así se genera una máscara que permite determinar si, para cada pixel de la pieza de carne analizada, hay algún cuerpo extraño (o es carne sana sin cuerpo extraño) , qué tipo de elemento extraño es e identificar donde se encuentran dentro de la muestra de carne (ya que se indican los píxeles de la imagen que se clasifican como pertenecientes a dicho cuerpo extraño) . Los resultados se pueden mostrar mediante la creación de imágenes donde se indican con códigos de color el tipo de cuerpo extraño identificado o también con cualquier tipo de reporte o informe donde se indique si hay o no cuerpo extraño y el tipo y ubicación del cuerpo extraño (en el caso de que lo haya) . En el ejemplo particular del anexo 1, se encuentran los coeficientes para los cuerpos extraños del tipo ternilla, absceso, hueso, tendón, carne ruminal, carne encallada, coagulo, pelo, piel, callo, costilla y etiqueta y también los coeficientes de tipos de carne no contaminada ("carne") y del fondo de la imagen. Pero esto es solo un ejemplo, y mediante el proceso de entrenamiento previo anteriormente citado, se pueden obtener coeficientes para otro tipo de cuerpos extraños y de carne no contaminada. Análisis de parámetros físico-químicos y compuestos químicos: Éste es un análisis cuantitativo en el que se determina el valor de ciertos parámetros físico/químicos o la cantidad/concentración de ciertos compuestos químicos en la muestra de carne, mediante imágenes hiperespectrales, utilizando lente macroscópica. Los parámetros/compuestos a determinar pueden ser por ejemplo pH, humedad, color instrumental (se suele llamar color instrumental a las medidas de color de la carne, que se miden en el espacio de color L a b, siendo la L la luminosidad que va desde el negro hasta el blanco y la a y b dos gamas de colores que van desde el verde hasta el rojo y desde el azul hasta el amarillo) , grasa y perfil de ácidos grasos (C14, C16, C17, C18 y C20) , atocoferol, p-Y-tocoferoles, neofitadieno y trioleína, o cualquier otro tipo de parámetro o compuesto químico. De ellos, aquellos cuya identificación y cuantificación (sobre todo, en cuanto a diferencias hay en los diferentes tipos de matrices cárnicas) suele ser más útil e importante serían el contenido en grasa y perfil de ácidos grasos (mirístico o miristoleico C14, palmítico C16, esteárico C18) . Mediante este análisis, a partir de los espectros adquiridos y procesados (de la muestra de carne) y de una firma espectral obtenida previamente para cada parámetro/compuesto (y también puede que para cada tipo animal o zona de muestreo de la carne) se determina (estima) la medida de uno o más parámetros/compuestos de interés en la carne que se está monitorizando. Para ello, en un proceso de entrenamiento previo (usando por ejemplo técnicas de inteligencia artificial como "machine leaming") se ha obtenido la firma espectral (también llamada patrón espectral) que caracteriza cada uno de los parámetros/compuestos que se quiere medir en cada tipo de fruto. Es decir, se han capturado imágenes espectrales de prueba de distintas muestras de carne en las que sí se conocía la medida de los parámetros/compuestos de interés, se ha correlacionado los datos de estas imágenes hiperespectrales con la cantidad de cada parámetro/compuesto presente y, a partir de ahí, se ha obtenido el valor en cada una de las longitudes de onda que cuantifica la presencia de cada uno de los parámetros. Para asegurar la precisión del modelo, se ha construido un diseño experimental para el entrenamiento previo, que en primer lugar separa las muestras en sets de calibración y de validación. Con las muestras de calibración se han entrenado los modelos y con las de validación se ha verificado la idoneidad de los mismos. Existen en quimiometría herramientas estadísticas y parámetros de calidad que aseguran el correcto funcionamiento de los mismos, la falta de fenómenos no deseados de sobreajuste y que al mismo tiempo asegura que el modelo seguirá funcionando con nuevas muestras en un futuro. En una realización, al ser un análisis cuantitativo, en el entrenamiento se aplican modelos de egresión multivariante como son, por ejemplo, la regresión por mínimos cuadrados parciales (PLSR) o la regresión múltiple lineal (MLR) . También se aplica modelos de inteligencia artificial como son, por ejemplo, el machine learning. El resultado final de estos modelos de entrenamiento es un vector (patrón o firma espectral) con un coeficiente por cada longitud de onda más un término independiente que, aplicado a un espectro problema, arroja un valor numérico que corresponde con la magnitud a analizar. Dichos coeficientes dependen del analito (es decir, del parámetro o compuesto que se quiere medir) y de la naturaleza de la muestra (como tipo de animal y zona de muestreo) . El resultado en cada caso (en el ejemplo concreto de 170 longitudes de onda) es un vector de 171 elementos (un coeficiente para las 170 longitudes de onda más un término independiente) que depende del parámetro/compuesto a cuantificar. En el anexo 2, se encuentran los coeficientes obtenidos para la determinación cuantitativa de los siguientes compuestos: trioleína, a-tocoferol, p-Y-tocoferoles, ácidos miristoleico, palmítico y oleico y neofitadieno (esto es solo un ejemplo, y mediante el proceso de entrenamiento previo anteriormente citado, se pueden obtener otros coeficientes y para otro tipo de compuestos o parámetros químicos) . Como se ha indicado, se tiene un coeficiente para cada una de las bandas electromagnéticas (170 en el caso de ejemplo) y para cada compuesto a detectar. A continuación, se compara el espectro de la imagen capturada con estos coeficientes de la firma espectral para estimar la cantidad presente de dicho analito (caracterizado por la firma espectral) en la carne cuya imagen se ha capturado. Así, para cada uno de los F (siendo F el número de píxeles de la región de interés como se ha explicado antes) pixeles de la carne de la imagen hiperespectral capturada, se multiplica cada valor del espectro del píxel (para cada longitud de onda) por su coeficiente correspondiente, se suman los valores obtenidos y se añade el término independiente. El dato obtenido será el resultado de dicho analito en ese punto (o mejor dicho en ese pixel) de la carne. Se aplica este procedimiento (multiplicación y suma) a cada uno de los F píxeles y se obtiene la matriz de resultados. Esto es solo un ejemplo y la comparación para obtener los resultados se puede realizar de cualquier otro modo conocido. Los resultados se pueden exportar a un archivo (txt, xlsx, csv...) mostrando un análisis estadístico (valor medio de cada uno de los analitos, dispersión de los resultados, etc) . Además del documento con los resultados numéricos, se puede crear una imagen donde se muestran gráficamente. Por ejemplo, sobre una imagen real a color se superpone la retícula de las regiones seleccionadas por la segmentación y se muestra en una escala de color la concentración de un determinado analito. Análisis de contaminación microbiana: Mediante este análisis de contaminación microbiana se identifican y se cuantifican diferentes tipos de microrganismos, especialmente se usa para aquellos seleccionados como los principales patógenos existentes en carnes. Algunos de estos microrganismos que son patógenos típicos de la carne y que se detectan con la invención propuesta son: Escherichia coli, Pseudomonas spp., Listeria monocytogenes, Enterobacteria, Salmonella spp. Staphylococcus Aureus o Lactobacillus spp. Esto es solo un ejemplo y esta técnica se puede aplicar a cualquier otro tipo de elementos extraños que se desee. A partir de un sistema de visión artificial basada en una cámara hiperespectral con una lente microscópica acoplada, sensible a un rango del espectro electromagnético (por ejemplo 400 a 1000 nm aproximadamente) , se generan datos hiperespectrales para un determinado número de bandas (170 en el ejemplo que estamos usando) distribuidas de manera homogéneas con el fin de detectar, identificar y cuantificar los diferentes componentes microbiológicos (microrganismos) . El sistema de iluminación empleado en el ejemplo mostrado en la figura 2, consiste en un iluminador que porta una lámpara halógena dicroica de 35W que proyecta luz hacia un conductor de fibra óptica cuyo terminal conforma una base rectangular de 1 cm de largo por 1 mm de ancho sobre la que se sitúa la muestra de carne a analizar. Esta fuente de iluminación es regulable para obtener el nivel de intensidad deseado, siendo el nivel óptimo aquel que permite la transmisión de la luz aceptable para la obtención de las imágenes hiperespectrales. En una realización, se han realizado ensayos en los que se han podido identificar a través de la tecnología hiperespectral los diferentes microrganismos mencionados anteriormente obre diferentes tipos de medios de cultivos (agua de peptona y agar) , así como muestras de carne, analizando una muestra de carne de 25 cm2 en cada uno de los ensayos. Otro método alternativo sobre el que se han realizado ensayos en línea con la contaminación sobre carne es la identificación de las diferentes cepas sobre placas de contacto Rodac, de tal manera que los microrganismos puedan ser transferidos e identificados de forma eficiente. Aplicando la solución propuesta se han llegado a identificar cada uno de los microrganismos en concentraciones que van desde rango menores de 102 ufc/ml hasta 109 ufc/ml. Como se ha indicado anteriormente, a partir de un sistema de visión artificial basada en una cámara hiperespectral, se obtienen medidas para cada pixel de la región de interés y para un cierto número de longitudes de onda (170 para el caso de ejemplo) . En una realización se usa una técnica de clasificación de análisis lineal discriminante como en el caso de detección de cuerpos extraños (esto es solo un ejemplo no limitativo y se puede usar cualquier otra técnica de clasificación conocida) . Como se ha indicado anteriormente, este análisis lineal discriminante es un método de clasificación basado en unas categorías que han sido previamente descritas y calculadas, a las cuales se les ha asignado para cada longitud de onda un coeficiente que permite identificarlas. Estos coeficientes es lo que se conoce como función discriminante. En el anexo 3, se encuentran las funciones discriminantes (coeficientes) obtenidas para la detección del microorganismo salmonella de acuerdo a una realización de la invención (esto es solo un ejemplo y en otras realizaciones se pueden obtener y usar otros valores para los coeficientes) . Se tendrán coeficientes para cada una de las bandas electromagnéticas (170 en el caso de ejemplo) , los correspondientes a la de presencia de contaminación por el patógeno en estudio (en el caso del anexo 3, salmonella) y el correspondiente a carne no contaminada. Para obtener estos coeficientes, en un proceso de entrenamiento previo (usando por ejemplo técnicas de inteligencia artificial como "machine leaming") se ha obtenido la firma espectral (también llamada patrón espectral) que caracteriza la contaminación por cada microorganismo. Es decir, se han capturado imágenes espectrales de prueba de distintas muestras contaminadas por cada uno de los patógenos y de muestras sin contaminar y, a partir de ahí, se ha obtenido el valor en cada una de las longitudes de onda de los oeficientes correspondientes. Para la detección, cada espectro de cada pixel de la muestra se multiplica elemento a elemento con los coeficientes de la función discriminante, se suman los resultados y se añade el término independiente. Así, se obtiene un valor para cada patógeno en estudio y el correspondiente a carne no contaminada, asignando a cada píxel la categoría (patógeno o carne no contaminada) cuya función discriminante haya dado un valor más alto. Así se genera una máscara que permite determinar si para cada pixel de la muestra hay contaminación por un patógeno, qué tipo de patógeno es y la cantidad del mismo. En una realización, para llevar a cabo la identificación de dichos microorganismos, se realiza sobre cada imagen hiperespectral un pretratamiento de la imagen que permite normalizar el espectro de cada pixel para poderlos comparar en las mismas condiciones. Una vez realizada dicha comparación se identifican los microorganismos mediante una serie de umbrales de intensidad en determinadas longitudes de onda, asignando a cada pixel si dicho pixel corresponde a un microorganismo y cuál de ellos es (distinguiéndolo, por ejemplo, mediante un color como verde, rojo o azul) o si bien corresponde a parte de la muestra cárnica sin presencia de microorganismo, es decir, sin contaminar (distinguiéndolo por ejemplo, mediante un color negro) . Para llevar a cabo también la cuantificación de los microorganismos, en una realización, se ha desarrollado un modelo por la regresión por mínimos cuadrados parciales (PLSR) a la que también se aplica modelos de inteligencia artificial como son, por ejemplo, el machine learning, que permiten mantener el modelo actualizado. El resultado final de estos modelos de entrenamiento es un vector (patrón o firma espectral) con un coeficiente por cada longitud de onda más un término independiente que, aplicado a un espectro problema, arroja un valor numérico que corresponde con la magnitud a analizar. Dichos coeficientes (que son distintos a los que se usan para la detección, es decir, son distintos a los que aparecen en el anexo 3) dependen del microorganismo que se quiere cuantificar y de la naturaleza de la muestra (como tipo de animal y zona de muestreo) . El resultado en cada caso (en el ejemplo concreto de 170 longitudes de onda) es un vector de 171 elementos (un coeficiente para las 170 longitudes de onda más un término independiente) que depende del parámetro/compuesto a cuantificar. Es decir, cada coeficiente correspondería a la presencia e una unidad formadora de colonias de dicho microorganismo para cada longitud de onda, multiplicando el espectro obtenido para cada pixel por estos coeficientes se obtiene la cantidad de dicho microorganismo en dicho pixel. La cuantificación se puede expresar en la magnitud de unidades formadoras de colonias (u.f.c.) que puede ser mostrada en función del área (cm2) o de la masa (gramos) ; esto es solo un ejemplo y en otras realizaciones se puede usar otro tipo de unidades de cuantificación. Los datos obtenidos para cada muestra se pueden almacenar en un archivo donde se muestra la estadística correspondiente. Como se ha indicado anteriormente, además, se puede crear una imagen donde se muestran gráficamente; para ello, sobre una imagen real a color se superpone la retícula donde con un código de color (por ejemplo, negro, verde, rojo y azul) se identifican y cuantifican cada uno de los diferentes microorganismos presentes en la muestra. Así, por ejemplo, los colores verde, rojo o azul pueden indicar que en ese pixel hay un cierto tipo de microrganismo y el color negro que dicho pixel está sin contaminar. En general, los resultados obtenidos en los análisis anteriores (determinación de parámetros o compuestos químicos, de cuerpos extraños o de microorganismos patógenos) se pueden procesar de distintas maneras para presentarlos al usuario. Así, los datos obtenidos se pueden exportar a un archivo mostrando los datos en bruto o con algún tipo de análisis estadístico y este archivo de datos se puede almacenar en el equipo electrónico de procesamiento y/o enviar a un dispositivo electrónico del usuario para que él acceda al mismo (y lo almacene en su dispositivo si así lo desea) . También para que los resultados sean más fácilmente entendibles y visualizados por el usuario, se pueden presentar, como se ha indicado, en forma de un mapa de color de las muestras de carne. En estos mapas, a través de una gradación de color para cada pixel, se representa visualmente una escala numérica de modo que, de un simple vistazo, es posible ver la magnitud de un parámetro dentro de una imagen (en el caso de que los datos obtenidos sean cuantitativos, como en el análisis de parámetros químicos) o simplemente se representa con un color distinto según el tipo de cuerpo extraño o el tipo de microorganismo detectado en cada pixel (y con otro color si no se ha detectado cuerpo extraño/microrganismo) . Así, los resultados se pueden acompañar del mapa de color resultante para la mejora de la comprensión de los resultados. En una realización de la invención, se pasa la pieza de carne (mediante cinta ransportadora) por debajo de la cámara hiperespectral para tomar una imagen hiperespectral y, a partir de ella (y tras procesarla convenientemente) se hace el análisis para detectar los cuerpos extraños y determinar los parámetros físico-químicos y compuestos químicos. Después (o antes en otras realizaciones) se extrae una muestra de dicha pieza de carne del tamaño apropiado y se pasa por una cámara hiperespectral (la misma u otra distinta) con la lente microscópica (por ejemplo usando la estructura mostrada en la figura 2) para tomar una imagen hiperespectral y, a partir de ella (y tras procesarla convenientemente) se hace el análisis para detectar los microorganismos. Para este último análisis, la muestra de carne se puede seleccionar dentro de la pieza de manera arbitraria o siguiendo algún criterio; en una realización, este criterio puede depender del resultado de alguno de los análisis anteriores, es decir, seleccionar la zona para extraer la muestra de la pieza de carne dependiendo del resultado del análisis de cuerpos extraños y/o del análisis de los resultados de parámetros/compuestos químicos (por ejemplo, se puede seleccionar una zona donde no hayan sido detectados cuerpos extraños) . En una realización, el realizar uno de los análisis puede depender del resultado de otro de los análisis. Por ejemplo, si se detectan patógenos, la pieza se desecha y ya no hace falta hacer el resto de análisis) . Siendo, en una realización, el orden prioritario de análisis detección de patógenos, detección de cuerpos extraños y análisis de características físicoquímicas. Resumiendo, la presente invención propone un método y sistema para la medida de características que permiten evaluar la calidad de la carne (parámetros de calidad) mediante tecnología de imagen hiperespectral. Estas características pueden ser parámetros/componentes químicos de interés industrial, detección de cuerpos extraños y presencia de microorganismos patógenos. La presente invención permite la determinación simultánea de multitud de parámetros (por ejemplo, la detección de cuerpos extraños y la determinación de varios componentes o parámetros químicos se puede hacer simultáneamente a partir de la misma imagen hiperespectral, o la detección de distintos tipos de microorganismos también se realiza simultáneamente a partir de la misma imagen hiperespectral tomada con lente microscópica) , en tiempo real y sobre toda la producción. A grandes rasgos, el procedimiento propuesto incluye la captura de las imágenes en una cinta de transporte industrial, el procesado de las imágenes, la aplicación de modelos (quimiométricos) para la predicción, la presentación al usuario y/o el almacenamiento de los esultados. También, la invención propuesta permite crear imágenes donde mediante mapas de color se exponen los resultados sobre toda la superficie de la muestra. Muchas realizaciones de las aquí presentadas se refieren a carne de vacuno y porcino, pero esto es solo un ejemplo, ya que el procedimiento y sistema propuesto se podría aplicar a cualquier otro tipo de carne o producto cárnico. En este texto, el término "comprende" y sus derivaciones (como "comprendiendo", etc.) no deben entenderse en un sentido excluyente, es decir, estos términos no deben interpretarse como excluyentes de la posibilidad de que lo que se describe y define pueda incluir más elementos, etapas, etc. Descrita suficientemente la naturaleza de la invención, así como la manera de realizarse en la práctica, hay que hacer constar la posibilidad de que sus diferentes partes podrán fabricarse en variedad de materiales, tamaños y formas, pudiendo igualmente introducirse en su constitución o procedimiento, aquellas variaciones que la práctica aconseje, siempre y cuando las mismas, no alteren el principio fundamental de la presente invención. La descripción y los dibujos simplemente ilustran los principios de la invención. Por lo tanto, debe apreciarse que los expertos en la técnica podrán concebir varias disposiciones que, aunque no se hayan descrito o mostrado explícitamente en este documento, representan los principios de la invención y están incluidas dentro de su alcance. Además, todos los ejemplos descritos en este documento se proporcionan principalmente por motivos pedagógicos para ayudar al lector a entender los principios de la invención y los conceptos aportados por el (los) inventor (es) para mejorar la técnica, y deben considerarse como no limitativos con respecto a tales ejemplos y condiciones descritos de manera específica. Además, todo lo expuesto en este documento relacionado con los principios, aspectos y realizaciones de la invención, así como los ejemplos específicos de los mismos, abarcan equivalencias de los mismos. Aunque la presente invención se ha descrito con referencia a realizaciones específicas, los expertos en la técnica deben entender que los anteriores y diversos otros cambios, omisiones y adiciones en la forma y el detalle de las mismas pueden realizarse sin apartarse del alcance de la invención tal como se definen mediante las reivindicaciones siguientes. ANEXOS. ANEXO 1: Funciones discriminantes para la detección de cuerpos extraños ANEXO 2: Coeficientes de regresión para el análisis cuantitativo ANEXO 3: Funciones discriminantes para la detección de salmonella
Publicaciones:
ES2957224 (15/01/2024) - A1 Solicitud de patente con informe sobre el estado de la técnica
Eventos:
En fecha 02/06/2022 se realizó Registro Instancia de Solicitud
En fecha 02/06/2022 se realizó Admisión a Trámite
En fecha 02/06/2022 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 06/06/2022 se realizó Superado examen de oficio
En fecha 14/11/2022 se realizó Realizado IET
En fecha 17/11/2022 se realizó 1109P_Comunicación Traslado del IET
En fecha 15/01/2024 se realizó Publicación Solicitud
En fecha 15/01/2024 se realizó Publicación Folleto Solicitud con IET (A1)
En fecha 07/05/2024 se realizó Validación petición y/o pago de examen sustantivo no conforme
En fecha 07/05/2024 se realizó Retirada
En fecha 07/05/2024 se realizó 1108P_Notificación retirada solicitud por no petición y/o pago de examen sustantivo
Pagos:
02/06/2022 - Pago Tasas IET
Fuente de la información
Parte de la información aquí publicada es pública puesto que ha sido obtenida de la Oficina de Propiedad Industrial de los diferentes países el 09/05/2024 y por lo tanto puede ser que la información no esté actualizada.Parte de la información aquí mostrada ha sido calculada por nuestro sistema informático y puede no ser veraz.
Privacidad
Si considera que al información aquí publicada afecta a su privacidad y desea que eliminemos la información aquí publicada envíe un email a info@patentes-y-marcas.com o rellene el formulario que encontrará aquí.Información sobre el registro de patente nacional por Método y sistema mejorados para la evaluación de la calidad de carne mediante imágenes hiperespectrales con el número P202230474
El registro de patente nacional por Método y sistema mejorados para la evaluación de la calidad de carne mediante imágenes hiperespectrales con el número P202230474 fue solicitada el 02/06/2022. Se trata de un registro en España por lo que este registro no ofrece protección en el resto de países. El registro Método y sistema mejorados para la evaluación de la calidad de carne mediante imágenes hiperespectrales con el número P202230474 fue solicitada por AMBLING INGENIERIA Y SERVICIOS, S.L. mediante los servicios del agente Gustavo Adolfo González Peces. El registro [modality] por Método y sistema mejorados para la evaluación de la calidad de carne mediante imágenes hiperespectrales con el número P202230474 está clasificado como G01N 21/84,G01N 21/25,G06F 18/20 según la clasificación internacional de patentes.
Otras invenciones solicitadas por AMBLING INGENIERIA Y SERVICIOS, S.L.
Es posible conocer todas las invenciones solicitadas por AMBLING INGENIERIA Y SERVICIOS, S.L. entre las que se encuentra el registro de patente nacional por Método y sistema mejorados para la evaluación de la calidad de carne mediante imágenes hiperespectrales con el número P202230474. Si se desean conocer más invenciones solicitadas por AMBLING INGENIERIA Y SERVICIOS, S.L. clicar aquí.Otras invenciones solicitadas en la clasificación internacional de patentes G01N 21/84,G01N 21/25,G06F 18/20.
Es posible conocer invenciones similares al campo de la técnica se refiere. El registro de patente nacional por Método y sistema mejorados para la evaluación de la calidad de carne mediante imágenes hiperespectrales con el número P202230474 está clasificado con la clasificación G01N 21/84,G01N 21/25,G06F 18/20 por lo que si se desea conocer más registros con la clasificación G01N 21/84,G01N 21/25,G06F 18/20 clicar aquí.Otras invenciones solicitadas a través del representante GUSTAVO ADOLFO GONZÁLEZ PECES
Es posible conocer todas las invenciones solicitadas a través del agente GUSTAVO ADOLFO GONZÁLEZ PECES entre las que se encuentra el registro patente nacional por Método y sistema mejorados para la evaluación de la calidad de carne mediante imágenes hiperespectrales con el número P202230474. Si se desean conocer más invenciones solicitadas a través del agente GUSTAVO ADOLFO GONZÁLEZ PECES clicar aquí.Patentes en España
Es posible conocer todas las invenciones publicadas en España entre las que se encuentra el registro patente nacional por Método y sistema mejorados para la evaluación de la calidad de carne mediante imágenes hiperespectrales. Nuestro portal www.patentes-y-marcas.com ofrece acceso a las publicaciones de patentes en España. Conocer las patentes registradas en un país es importante para saber las posibilidades de fabricar, vender o explotar una invención en España.Patentes registradas en la clase G
Es posible conocer todas las patentes registradas en la clase G (FISICA) entre las que se encuentra la patente Método y sistema mejorados para la evaluación de la calidad de carne mediante imágenes hiperespectrales con el número P202230474. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase G01
Es posible conocer todas las patentes registradas en la clase G01 (METROLOGIA; ENSAYOS) entre las que se encuentra la patente Método y sistema mejorados para la evaluación de la calidad de carne mediante imágenes hiperespectrales con el número P202230474. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase G01N
Es posible conocer todas las patentes registradas en la clase G01N (INVESTIGACION O ANALISIS DE MATERIALES POR DETERMINACION DE SUS PROPIEDADES QUIMICAS O FISICAS) entre las que se encuentra la patente Método y sistema mejorados para la evaluación de la calidad de carne mediante imágenes hiperespectrales con el número P202230474. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase G06
Es posible conocer todas las patentes registradas en la clase G06 (COMPUTO; CALCULO; CONTEO) entre las que se encuentra la patente Método y sistema mejorados para la evaluación de la calidad de carne mediante imágenes hiperespectrales con el número P202230474. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase G06F
Es posible conocer todas las patentes registradas en la clase G06F (PROCESAMIENTO ELECTRICO DE DATOS DIGITALES) entre las que se encuentra la patente Método y sistema mejorados para la evaluación de la calidad de carne mediante imágenes hiperespectrales con el número P202230474. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.
¿Tienes alguna duda?
Escribe tu consulta y te responderemos rápida y gratuitamente.

Otras patentes similares
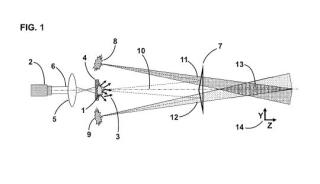
 P202230471
P202230471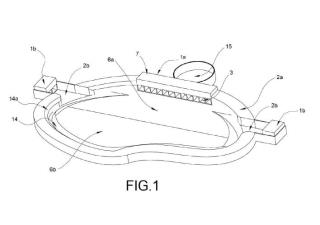
Profesionales Recomendados
Barcelona
933182440
España
933182440
España

Barcelona
+34 93 362 16 97
España
+34 93 362 16 97
España

Barcelona
932 593 600
España
932 593 600
España







