


- Home /
- Publicaciones de patentes /
- Equipo recolector en continuo de árboles
Patente nacional por "Equipo recolector en continuo de árboles"
Este registro ha sido solicitado por
Persona física
Contacto
- Estado: Vigente
- País:
- España
- Fecha solicitud:
- 04/12/2023
- Número solicitud:
-
P202331013
- Número publicación:
-
ES2963847
- Fecha de concesión:
-
- Inventores:
-
Persona física
- Datos del titular:
-
Persona física
- Datos del representante:
-
- Clasificación Internacional de Patentes:
- A01D 46/26
- Clasificación Internacional de Patentes de la publicación:
- A01D 46/26
- Fecha de vencimiento:
Quiero registrar una patente

Reivindicaciones:
+ ES-2963847_A11.- Equipo recolector en continuo de árboles, arrastrado, dotado de un grupo de presión hidráulico (33) suspendido del vehículo tractor que lo arrastra, una barra de tiro (1) orientable horizontal y verticalmente, un vibrador (9) cuyos brazos (18) se abren a 180° y un paraguas invertido (10) de tamaño optimizado, con dos ruedas (14) ubicadas en la parte trasera del equipo con capacidad de frenado, de elevación y de ser orientadas, dispone de un sistema aspiración para el transporte de los frutos desde el paraguas (10) hasta un depósito de almacenamiento (12) , el cual, tiene capacidad de ser vaciado por gravedad mediante un mecanismo de tijera (31) , posee un elemento sensor que detecta la presencia de árboles y un controlador lógico que gestiona los ciclos de vibrado y limita el tiempo máximo de vibración, caracterizado porque: • dispone de un bastidor telescópico, que a su vez está conformado por un bastidor exterior (5) que contiene a un bastidor interior (6) que se desplaza por el interior del primero. El movimiento del bastidor interior (6) a través del bastidor exterior (5) es controlado mediante un cilindro hidráulico (7) . El bastidor telescópico posee la capacidad de variar su longitud consiguiendo sincronizar el movimiento continuo del vehículo tractor con el trabajo discontinuo y estático del recolector • la barra de tiro (1) está montada sobre un soporte articulado (4) que a su vez está unido al bastidor interior (6) • en la parte trasera del bastidor exterior (5) se instala un chasis (11) que soporta el depósito de almacenamiento (12) de frutos y un eje (13) para las ruedas (14) del equipo • posee un soporte articulado (8) , montado sobre el bastidor exterior (5) , con forma de bisagra extendida que sustenta el vibrador (9) y el paraguas invertido (10) . El soporte articulado (8) tiene la capacidad de plegarse 90° girando el conjunto paraguas (10) y vibrador (9) y reduciendo la anchura del equipo recolector en los desplazamientos • el paraguas (10) está montado sobre un sistema telescópico que, a su vez, se instala sobre el mismo soporte (8) del vibrador (9) . Este sistema telescópico está conformado por un pequeño bastidor interior (23) que transcurre por un bastidor exterior (24) con la ayuda de un cilindro hidráulico (25) 2.- Equipo recolector en continuo de árboles, según la reivindicación 1, caracterizado porque el vibrador dispone en sus brazos (18) de un sistema que permite la libre articulación de unos soportes (19) para sus tacos (20) de goma. La articulación está compuesta de un eje (21) dispuesto de forma longitudinal a los soportes (19) de los tacos (20) y de casquillos (22) . 3.- Equipo recolector en continuo de árboles, según la reivindicación 1, caracterizado porque dispone de un sistema orientado a ayudar en el guiado al conductor del vehículo tractor que arrastra el recolector. El sistema posee tres palpadores mecánicos de distintas longitudes ubicados uno encima del otro de forma vertical. En función del número de palpadores que detectan el tronco el árbol a vibrar el sistema puede corregir el desplazamiento lateral del equipo recolector actuando sobre la barra de tiro (1) . 4.- Equipo recolector en continuo de árboles, según la reivindicación 1, caracterizado porque permite la instalación de un paraguas (35) y un vibrador (36) de construcción tradicional o convencional. Para realizar esta instalación, se sustituye el paraguas (10) , el vibrador (9) y el soporte (8) donde se montan estos componentes originales y se instala otro soporte (37) más pequeño cuya articulación se realiza junto al bastidor exterior (5) . Acoplado al soporte adaptado (37) se encuentra un sistema telescópico destinado a provocar el avance o retroceso del paraguas convencional (35) frente al árbol a vibrar. Este sistema telescópico está conformado por un doble bastidor interior (39) que transcurre por un doble bastidor exterior (40) con la ayuda de un cilindro hidráulico (41) que gestiona sus movimientos. Montado sobre el extremo del doble bastidor interior (39) se encuentra un chasis (42) con la capacidad de ser configurado para poder ser acoplado a cualquier paraguas comercial.
Los productos y servicios protegidos por este registro son:
A01D 46/26
Descripciones:
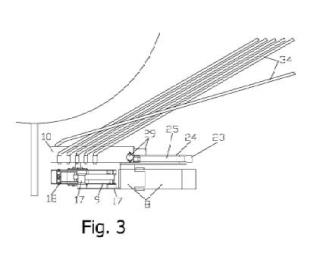
+ ES-2963847_A1 EQUIPO RECOLECTOR EN CONTINUO DE ÁRBOLES SECTOR DE LA TÉCNICA El campo de aplicación de este equipo recolector se encuadra dentro de la fabricación de equipos recolectores de frutos. El objeto de la invención es la de describir un nuevo equipo recolector arrastrado, con un novedoso sistema de vibrado y recogida de fruto, de tal forma, que el tractor o vehículo que tira del equipo no se detiene durante la operación y, sin embargo, el equipo recolector si se detiene en cada uno de los árboles para realizar las funciones de vibrado y recogida del fruto en estático. Además, el equipo consigue grandes velocidades de recolección en continuo, dispone de gran versatilidad, funcionamiento simple, fabricación económica y un reducido tamaño. El equipo recolector ha sido concebido para trabajar de forma continua y está compuesto de un vibrador tradicional, el cual ha sido construido con la peculiaridad que sus brazos se abren hasta formar un ángulo de 180° y dispone de una mayor capacidad de adaptación al árbol porque permite el libre giro de los tacos. Posee un paraguas invertido para la recolección del fruto derribado por el vibrador, el cual, se desplaza hacia delante o hacia atrás, en la dirección perpendicular al avance del equipo recolector, según los brazos del vibrador se abran o cierren para ceñirse al árbol a vibrar. También dispone de un bastidor extensible el cual puede aumentar o disminuir su longitud de forma telescópica. Por otro lado, tanto el vibrador como el paraguas tienen la capacidad de plegarse y recogerse para disminuir el tamaño ocupado en los desplazamientos entre fincas. El recolector dispone de un sistema de aspiración para conducir los frutos derribados hacia un depósito acumulador situado en la parte trasera del equipo. En caso que los frutos derribados posean capota el equipo dispone de un sistema descapotador ubicado en el paraguas invertido. Al tratarse de un equipo arrastrado, este dispone de una barra de tiro orientable con capacidad de moverse vertical y horizontalmente y de dos ruedas ubicadas en la parte trasera del equipo con capacidad de ser orientadas para reducir la superficie ocupada en el giro del equipo en las cabeceras. El equipo tiene capacidad para trabajar de forma automática y para tal fin dispone de un sensor para detectar la presencia del árbol a vibrar y de varios sensores para ayudar al conductor en su guiado, los cuales transmiten sus señales a un controlador lógico que gestiona la operativa del mismo. ANTECEDENTES DE LA INVENCIÓN Existen numerosas publicaciones que describen equipos de recolección, particularmente pueden destacarse las siguientes, • ES2911112A1 • ES2630833A1 • ES1047154U • ES1047707U • ES1167210U • ES2652322A1 • ES2567528A1 • ES2293777A1 En ninguno de estos documentos se ha encontrado referencias a un equipo recolector arrastrado, dotado de un paraguas invertido con capacidad de desplazamientos de avance y retroceso, de un vibrador que junto con el paraguas dispongan de giro para plegarse en los desplazamientos y de un bastidor telescópico que permita el trabajo de recolección del equipo de forma estática en cada uno de los árboles mientras que el tractor que tira de él no precisa detenerse, obteniéndose así una recolección en continuo. EXPLICACIÓN DE LA INVENCIÓN El nuevo equipo recolector es de tipo arrastrado, unido a un tractor o similar mediante una barra de tiro. La barra de tiro puede orientarse, permitiendo el desplazamiento vertical con el objeto de bien descender el equipo para facilitar los trabajos de recolección o bien elevar el mismo para permitir los desplazamientos en los cabeceros o entre parcelas. Igualmente, la barra de tiro permite el desplazamiento horizontal, de esta forma, el equipo recolector puede desplazarse lateralmente respecto al tractor que tira de él, permitiendo que el tractor circule por el centro de las calles que forman las filas de árboles a recolectar y el equipo recolector lo haga muy próximo a los árboles. La barra de tiro está montada sobre un soporte articulado, que también contiene a los cilindros hidráulicos de orientación de la misma. El soporte articulado está unido a un chasis o bastidor que tiene la capacidad de variar su longitud de forma telescópica, debido a que está conformado por un bastidor exterior que contine a otro bastidor que se desplaza por su interior. El movimiento del bastidor interior a través del exterior es controlado mediante un cilindro hidráulico. El soporte articulado de la barra de tiro está unido al bastidor interior, mientras que sobre el bastidor exterior se monta el soporte del vibrador y del paraguas y en su parte trasera alberga el chasis que soporta el depósito y el eje de las ruedas del equipo. Aunque se ha indicado que el bastidor telescópico está formado por un bastidor exterior y otro interior, dentro de este último puede a su vez instalarse otro bastidor en su interior, acción que puede repetirse sucesivamente, dotando al ecolector de más de una prolongación de su bastidor telescópico y multiplicando por tanto su capacidad para extenderse. El movimiento de cada uno de los bastidores interiores instalados estará gestionado mediante un cilindro hidráulico. Para facilitar la comprensión del funcionamiento de la invención, de ahora en adelante, se considerará el uso de un único bastidor interior. Las dos ruedas del equipo disponen de sistemas de frenado y tienen capacidad para desplazarse verticalmente, permitiendo descender la parte posterior del equipo durante la recolección y elevar la misma para los desplazamientos en cabeceros o entre fincas. Igualmente, tienen posibilidad de giro a derechas o izquierdas permitiendo que el equipo recolector pueda circular por las mismas rodadas que el tractor durante el giro en las cabeceras y así reducir la superficie ocupada por el conjunto tractor y equipo recolector. El vibrador está montado mediante elementos elásticos en un soporte, el cual a su vez está unido al bastidor exterior del equipo. La forma de ese soporte, en su posición de trabajo, recuerda a la de una bisagra extendida. El citado vibrador, en cuanto a su sistema de vibrado, posee una operativa convencional, aunque se ha optado por un diseño que permite que los brazos del mismo puedan abrirse 180°. Por otro lado, y debido a que el equipo opera de forma automática, con el objeto de impedir daños en las cortezas, se ha optado por permitir el libre giro de los tacos de goma en el eje perpendicular al árbol a vibrar. Para lograr esta acción, el soporte de los tacos de goma está unido a los brazos del vibrador mediante una articulación. La articulación está compuesta de un eje dispuesto de forma longitudinal a los soportes de los tacos y de casquillos que rodean al citado eje y se encuentran soldados tanto en los soportes como en los brazos. El sistema de recogida del fruto está conformado por un paraguas invertido en cuyo diseño se han optimizado sus dimensiones y se ha dotado de capacidad para desplazarse, avanzando o retrocediendo con la finalidad de albergar completamente al árbol en su interior y que con sus brazos cerrados genera una estanqueidad perfecta que impide que se pierda fruto. El paraguas está ubicado justo en la parte superior del vibrador y está montado sobre un sistema telescópico que, a su vez, se instala sobre el mismo soporte del vibrador. Este sistema telescópico está conformado por un pequeño bastidor interior que transcurre por un bastidor exterior con la ayuda de un cilindro hidráulico que gestiona su movimiento. De esta forma, el paraguas tiene la capacidad de desplazarse respecto de la posición ocupada por el vibrador. Durante la operativa del equipo, tanto el paraguas como el vibrador están orientados de forma perpendicular al sentido de avance del recolector. Sin embargo, durante el transporte ambos componentes se orientan en la misma dirección del avance con el objeto de disminuir el volumen ocupado. Esto es posible porque el soporte que alberga el vibrador y el paraguas se pliega girando 90°. En cada uno de los dos brazos del paraguas se dispone de sendos tomillos sinfín que evacúan el fruto recogido hacia la parte trasera donde se encuentra otro tornillo sinfín que desplaza el fruto hacia uno de los lados del paraguas. Justo en este lado del paraguas, y en el exterior del mismo, es donde se instala el descapotador de frutos en caso de ser necesario. Para trasladar los frutos desde el paraguas o desde el descapotador, si este estuviera instalado, hasta el depósito de almacenamiento se utiliza un sistema de transporte neumático compuesto por un conducto flexible y una bomba de vacío movida por un motor hidráulico. Esta bomba de vacío encargada de realizar la succión se encuentra instalada en el interior del depósito de almacenamiento. Una vez que el depósito se ha llenado de fruto, este se descarga elevándose desde la parte trasera del equipo y llegando a una altura suficiente para poder verter su carga por gravedad a un remolque agrícola o equivalente. Para poder realizar la operación de descarga del depósito, el vibrador y el paraguas deben encontrarse en posición de trabajo, es decir, perpendiculares a la dirección del avance. El recolector trabaja completamente de forma automática y para tal fin dispone de un palpador mecáni comenzar el ciclo de vibrado y recolección del fruto. De igual forma, pueden utilizarse otro tipo de sensores para detectar la presencia del árbol. Por otro lado, y para ayudar en el guiado al conductor del tractor que arrastra el recolector, el equipo dispone de tres palpadores mecánicos de distintas longitudes ubicados uno encima del otro de forma vertical. De esta forma, cuando el tronco pasa por delante de este grupo de sensores pueden darse cuatro casos. • Los tres palpadores (tamaño corto, medio y largo) detectan la presencia del árbol. Esto significa que el recolector está demasiado cerca del tronco. En este caso el sistema de control modificará suavemente la orientación de la barra de tiro del equipo con el objeto de separarse del tronco. • Dos palpadores (tamaño medio y largo) detectan la presencia del árbol. Esto significa que el recolector está en la franja de separación idónea de trabajo. En este caso el sistema de control no modificará la orientación de la barra de tiro del equipo. • Un palpador (tamaño largo) detecta la presencia del árbol. Esto significa que el recolector está demasiado lejos del tronco. En este caso el sistema de control modificará suavemente la orientación de la barra de tiro del equipo con el objeto de acercarse al tronco. • Ningún palpador detecta la presencia del árbol. El sistema de control no realizará ninguna acción. Este sistema de ayuda al guiado está instalado en la parte delantera del bastidor interior. Toda la gestión del equipo recolector se realiza con la ayuda de un controlador lógico que activa y desactiva las electroválvulas hidráulicas. El grupo hidráulico, compuesto de bombas hidráulicas, depósito de aceite y sistema de filtrado de aceite, está suspendido de los brazos de tiro del tractor que arrastra el equipo recolector. Las bombas que generan el caudal hidráulico para todas las necesidades del equipo son movidas mediante la toma de fuerza del tractor. Una vez que se han descrito los componentes del recolector se explicará el funcionamiento y operativa en continuo del mismo, de tal forma que pueda comprenderse como el tractor o vehículo que tira del equipo no se detiene durante la operación y, sin embargo, el recolector se detiene en cada uno de los árboles para realizar las funciones de vibrado y recogida del fruto en estático. Cuando el equipo llega a una parcela y se dispone a iniciar la recolección, el usuario debe configurar el equipo pasando de modo transporte a modo de operación. En el modo de transporte: • Tanto el vibrador como el paraguas se encuentran orientados en el sentido del avance del equipo, con el objeto de reducir la anchura del equipo • Los brazos del vibrador se encuentran cerrados, con el objeto de conseguir la menor anchura posible • La barra de tiro se encuentra orientada horizontalmente de tal forma que el equipo recolector transita por detrás del tractor que lo arrastra, evitando que sobresalga por alguno de los lados y que por tanto el conjunto tractor-recolector ocupe más anchura de la necesaria • La barra de tiro se encuentra orientada verticalmente de tal forma que el equipo recolector se encuentra lo más elevado del suelo posible • Las ruedas del equipo recolector elevan a éste a su máxima altura En el modo de operación: • Tanto el vibrador como el paraguas se encuentran orientados en el sentido perpendicular al avance del recolector, con el objeto de poder recolectar los árboles desde el lateral del equipo • Los brazos del vibrador se encuentran abiertos a 180° • La barra de tiro se encuentra orientada horizontalmente de tal forma que el equipo recolector transita fuera de la estela del tractor que lo arrastra y, por tanto, sobresaliendo por el lado cuya fila de árboles va a ser recolectada • La barra de tiro se encuentra orientada verticalmente de tal forma que el equipo recolector se encuentra muy cerca del suelo • Las ruedas del equipo recolector descienden a éste muy cerca del suelo Por tanto, el usuario debe orientar el soporte del vibrador y paraguas y ajustar la altura del equipo disminuyendo la distancia hasta el suelo, actuando sobre la barra de tiro y las ruedas traseras. Posteriormente, debe modificar la orientación de la barra de tiro con el objeto de que el recolector pueda desplazarse lateralmente respecto al tractor y poder aproximarse a los troncos mientras que el tractor transita por el centro de las filas de árboles. Estas acciones asociadas al cambio de modo de transporte a modo de operación también pueden ser realizadas de forma automática por el controlador lógico. Al aproximarse el recolector al árbol a vibrar, los brazos del vibrador se encuentran abiertos y las lonas y barras del paraguas se encuentran recogidas. Por otro lado, el bastidor interior se encuentra completamente recogido dentro del bastidor exterior y, por tanto, el cilindro hidráulico que gestiona su movimiento se encuentra completamente recogido. Este cilindro hidráulico es de doble efecto por lo que tiene dos conexiones hidráulicas, una para que el fluido hidráulico extienda el cilindro y otra para que lo contraiga. Cuando el palpador mecánico detecta al árbol, éste manda una señal eléctrica al controlador el cual inicia simultáneamente las siguientes acciones: • Une mediante electroválvulas las dos conexiones hidráulicas del cilindro hidráulico que gestiona el movimiento del bastidor telescópico y las pone en conexión directa con el tanque del grupo de presión hidráulico. De esta forma el movimiento en el cilindro sólo dependerá de las fuerzas externas que actúen sobre él • Activa el freno de las ruedas traseras del recolector para detener a éste frente al árbol a vibrar. Como el tractor no se detiene durante la operación, el bastidor interior comienza a salir del bastidor exterior y por tanto el cilindro hidráulico comienza a extenderse • Inicia el cierre de la pinza del vibrador, ya que el tronco del árbol se encuentra justo enfrente de éste • Inicia el movimiento de avance del paraguas invertido en dirección al árbol a recolectar • Inicia el despliegue de las barras y lonas del paraguas invertido. Una vez que la pinza del vibrador se ha ceñido completamente al árbol, que el paraguas ha llegado al final de su carrera quedando completamente el árbol en su interior y que las barras del paraguas y lonas se han desplegado completamente, el controlador activa el vibrado del árbol. El tiempo de vibrado es indicado por el usuario. Sin embargo, este equipo posee un sistema de seguridad que puede limitar el tiempo de vibrado. Durante el tiempo de vibrado del árbol, el equipo recolector se encuentra detenido en el árbol, pero el tractor sigue avanzado, produciéndose una extensión telescópica del bastidor. Para evitar daños en el árbol asociados a que la citada extensión llegue a su fin sin que haya finalizado la vibración del árbol, el equipo dispone de un sensor o detector de seguridad ubicado cerca del final de la carrera de xtensión del bastidor. Una vez que ha concluido el tiempo de vibrado marcado por el usuario o en caso de activarse el sensor de seguridad, el controlador del equipo inicia las siguientes acciones: • Inicia la recogida de las barras y lonas del paraguas recolector • Inicia el movimiento de retroceso del paraguas invertido • Inicia la apertura de la pinza el vibrador • Desactiva el freno de las ruedas traseras del recolector • Activa la recogida del cilindro hidráulico que gestiona el movimiento del bastidor telescópico, lo que provoca que el bastidor interior se introduzca en el bastidor exterior y que el equipo vuelva a su longitud original Como ya se ha citado, en el diseño del paraguas y del vibrador utilizados en este equipo se han optimizado las dimensiones y las formas, obteniendo un paraguas de pequeñas dimensiones y un vibrador con la capacidad de abrir sus brazos hasta los 180°. En cuanto a su disposición relativa, el vibrador se instala "por debajo" del paraguas. Sin embargo, los paraguas tradicionales poseen dimensiones mucho mayores, ya que albergan en su interior al vibrador. En este caso, en cuanto a la disposición relativa, el vibrador está instalado "por encima" del paraguas. Por otro lado, este equipo recolector permite la instalación de un paraguas y un vibrador de construcción tradicional. Para realizar esta operación, se debe sustituir el paraguas, el vibrador y el soporte donde se montan estos componentes, los cuales han sido diseñados específicamente para esta aplicación e instalar otro soporte de dimensiones mucho más reducidas y cuyo efecto bisagra se realiza más cerca del bastidor exterior. Esta opción permite utilizar cualquier paraguas y vibrador tradicional en este equipo recolector en continuo y con ello multiplicar el rendimiento del sistema tradicional. Evidentemente, también supone una gran ventaja económica para los propietarios de un paraguas y vibrador tradicional, ya que pueden disponer de un sistema de recolección en continuo completamente automatizado ahorrándose parte de la inversión. El equipo recolector dotado de un paraguas y vibrador tradicional es completamente funcional. De igual forma que el paraguas de diseño optimizado tiene un sistema telescópico para avanzar o retroceder frente al árbol a recolectar, el conjunto formado por el paraguas tradicional y vibrador tradicional también dispone de un sistema telescópico muy robusto para avanzar frente al tronco del árbol a recolectar y lograr que éste quede en su interior para que pueda ser abrazado por el vibrador y rodeado por el paraguas. Este sistema telescópico está conformado por un doble bastidor interior que transcurre por un doble bastidor exterior con la ayuda de un cilindro hidráulico que gestiona sus movimientos. El doble bastidor telescópico está montado sobre el soporte con efecto bisagra solidario al bastidor exterior del equipo recolector. La operativa del equipo recolector dotado de un paraguas y vibrador convencional es similar a la indicada anteriormente con la salvedad que una vez que el equipo se ha detenido frente al árbol a vibrar, primero se aproxima el conjunto paraguas-vibrador y posteriormente se inicia el cierre de los brazos del vibrador para ceñirse al tronco. De igual forma, una vez finalizada la vibración, primero se abren los brazos del vibrador y posteriormente se inicia el movimiento de retroceso del conjunto paraguas-vibrador. Sin embargo, la utilización de un paraguas y vibrador tradicional en lugar de los diseñados y optimizados para este equipo tendría las siguientes desventajas: • Mayor anchura de transporte del equipo recolector, al utilizar un paraguas de dimensiones superiores • Mayor longitud del equipo recolector, al utilizar un paraguas de dimensiones superiores y un soporte de dimensiones más reducidas cuyo efecto bisagra se realiza más cerca del bastidor exterior • Menor velocidad de trabajo. El equipo recolector con el vibrador de diseño optimizado, una vez que se detiene frente al árbol a recolectar puede iniciar la maniobra de amarre al árbol, mientras que equipado con un vibrador tradicional primero debe aproximarse hasta el tronco del árbol y posteriormente amarrarse a él. BREVE DESCRIPCIÓN DE LOS DIBUJOS Para comprender mejor las ventajas y peculiaridades de la invención, se acompaña una serie de figuras que ilustran la forma de realización preferente de la misma. Estas figuras sólo se anexan a forma de ejemplo y no tienen carácter limitante. La figura 1 representa de forma esquemática el vibrador diseñado específicamente para el equipo recolector. Se muestra con los brazos completamente cerrados y abiertos. La figura 2 representa de forma esquemática una vista frontal de los brazos de vibrador, concretamente la articulación que disponen los tacos de goma y como se adaptan a los troncos de los árboles, aunque éstos no se encuentren completamente verticales La figura 3 representa de forma esquemática una vista lateral del vibrador y el paraguas del equipo recolector en configuración de operación. El vibrador tiene sus brazos abiertos a 180° y el paraguas se encuentra con su bastidor telescópico recogido. Ambos elementos se encuentran frente al árbol a recolectar. La figura 4 representa de forma esquemática la otra vista lateral del vibrador y el paraguas del equipo recolector en configuración de operación. En esta vista ueden observarse elementos que no pueden ser vistos en la figura 3. La figura 5 representa de forma esquemática una vista lateral del vibrador y el paraguas del equipo recolector en configuración de operación. El vibrador tiene sus brazos completamente cerrados y el paraguas se encuentra con su bastidor telescópico extendido. La figura 6 representa de forma esquemática una vista lateral del vibrador y el paraguas del equipo recolector en configuración de operación. El vibrador tiene sus brazos completamente cerrados y el paraguas se encuentra con su bastidor telescópico extendido y sus barras completamente desplegadas. Se observa el árbol a recolectar y como es abrazado por el vibrador y rodeado por el paraguas. La figura 7 representa de forma esquemática una vista frontal del equipo recolector. No aparece representado el depósito de almacenamiento de los frutos para que puedan apreciarse otros elementos del recolector. La figura 8 representa de forma esquemática la vista superior del equipo recolector en configuración de transporte. No aparece representado el depósito de almacenamiento de los frutos para que puedan apreciarse otros elementos del recolector. La figura 9 representa de forma esquemática el depósito de almacenamiento de frutos y su montaje en el chasis del equipo recolector. Se representa en posición de operación y en posición de descarga. La figura 10 representa de forma esquemática la vista superior del equipo recolector en configuración de operación. Aparece con los brazos del vibrador abiertos a 180° y el paraguas se encuentra con su bastidor telescópico recogido. La figura 11 representa de forma esquemática la vista superior del equipo recolector en configuración de operación. Aparece con los brazos del vibrador completamente cerrados y el paraguas se encuentra con su bastidor telescópico extendido y sus barras completamente desplegadas. También se representa esquemáticamente el tractor que lo arrastra y el grupo hidráulico que porta. La figura 12 representa de forma esquemática la vista superior del equipo recolector dotado de un conjunto paraguas-vibrador tradicional en configuración de transporte. La figura 13 representa de forma esquemática la vista superior del equipo recolector dotado de un conjunto paraguas-vibrador tradicional en configuración de operación. Aparece con los brazos del vibrador tradicional biertos y el paraguas se encuentra con su doble bastidor telescópico extendido y sus barras completamente desplegadas REALIZACIÓN PREFERENTE DE LA INVENCIÓN A continuación, se describirá con un mayor detalle la realización preferente del objeto de la invención. Como se ha indicado anteriormente, el nuevo equipo recolector es de tipo arrastrado y se encuentra acoplado a un tractor mediante una barra de tiro (1) . La barra de tiro (1) se orienta para permitir el desplazamiento vertical y elevar el equipo recolector con la ayuda de un cilindro hidráulico (2) . Igualmente, la barra de tiro (1) permite el desplazamiento horizontal con el objeto que el equipo recolector puede desplazarse lateralmente respecto al tractor que tira de él y así circular junto a los troncos de los árboles. Este movimiento de la barra de tiro (1) es realizado con la ayuda de un cilindro hidráulico (3) . Tanto la barra de tiro (1) como los cilindros hidráulicos (2) (3) están montados sobre un soporte articulado (4) . El soporte articulado (4) de la barra de tiro (1) está unido a un bastidor telescópico, que a su vez está conformado por un bastidor exterior (5) que contiene a otro bastidor interior (6) que se desplaza a través del primero. El movimiento del bastidor interior (6) a través del bastidor exterior (5) es controlado mediante un cilindro hidráulico (7) . El soporte articulado (4) de la barra de tiro (1) está unido al bastidor interior (6) , mientras que sobre el bastidor exterior (5) se monta un soporte articulado (8) con forma de bisagra extendida que sustenta un vibrador (9) y un paraguas invertido (10) . En la parte trasera del bastidor exterior (5) se instala un chasis (11) que soporta el depósito de almacenamiento (12) de frutos y el eje (13) de las ruedas (14) del equipo. Las dos ruedas (14) del equipo disponen de sistemas de frenado y tienen capacidad para desplazarse verticalmente, con el objeto de elevar el equipo recolector. Este movimiento se realiza con la ayuda de dos cilindros hidráulicos (15) . Igualmente, las ruedas (14) pueden ser orientadas para mejorar los giros en las cabeceras de las fincas. Esta orientación es controlada mediante un cilindro hidráulico (16) . El vibrador (9) está montado mediante elementos elásticos (17) en el soporte articulado (8) . Es un vibrador convencional, aunque permite que sus brazos (18) puedan abrirse 180°. También dispone en sus brazos (18) de un sistema que permite la libre articulación de los soportes (19) de los tacos (20) de goma. La articulación está compuesta de un eje (21) dispuesto de forma longitudinal a los soportes (19) de los tacos (20) y de casquillos (22) . La recogida del fruto se realiza mediante un paraguas invertido (10) que tiene la capacidad de desplazarse, avanzando o retrocediendo durante la operativa del equipo recolector. Para lograr esta acción, el paraguas (10) está montado obre un sistema telescópico que, a su vez, se instala sobre el mismo soporte (8) del vibrador (9) . Este sistema telescópico está conformado por un pequeño bastidor interior (23) que transcurre por un bastidor exterior (24) con la ayuda de un cilindro hidráulico (25) . Como se indicó anteriormente, durante la operativa del equipo, tanto el paraguas (10) como el vibrador (9) están orientados de forma perpendicular al sentido de avance del recolector. Sin embargo, durante el transporte, ambos componentes se orientan en la misma dirección del avance. Esto es posible porque el soporte (8) que alberga el vibrador (9) y el paraguas (10) se pliega en forma de bisagra girando 90°. Este movimiento de articulación del soporte (8) se realiza mediante un cilindro hidráulico (26) . Por otro lado, en cada uno de los dos brazos del paraguas (10) se dispone de sendos tornillos sinfín (27) que transportan el fruto hacia otro tornillo sinfín (28) ubicado en la parte trasera que a su vez concentra todo el fruto en un lateral del paraguas (10) . Todos los tornillos sinfín (27) (28) se mueven mediante motores hidráulicos (29) . Para transportar los frutos desde esta esquina del paraguas (10) o desde un descapotador, si éste estuviera instalado en este punto, hasta el depósito de almacenamiento (12) se utiliza un sistema de aspiración compuesto por un conducto flexible (30) y una bomba de vacío ubicada en el depósito (12) . Cuando el depósito de almacenamiento (12) se ha llenado de fruto, éste es vaciado mediante un mecanismo de tijera (31) movido por dos cilindros hidráulicos (32) . La descarga se produce por gravedad ya que el depósito de almacenamiento (12) se eleva hasta una altura suficiente para poder verter su carga a un remolque agrícola. Como ya se ha indicado, el recolector trabaja completamente de forma automática y con el objeto de detectar la presencia de los árboles e iniciar el ciclo de recolección se dispone de un palpador mecánico. Igualmente, para ayudar en el guiado al conductor del tractor que arrastra el recolector, el equipo dispone de tres palpadores mecánicos que mandan señales a un controlador lógico para que éste modifique la orientación de la barra de tiro (1) , si fuera necesario. Este sistema de ayuda al guiado está instalado en el soporte articulado (4) de la barra de tiro (1) . El citado controlador lógico realiza toda la gestión del equipo recolector mediante la activación y desactivación de electroválvulas hidráulicas. El grupo hidráulico (33) responsable que generar el caudal de fluido hidráulico necesario para el funcionamiento de todos los sistemas hidráulicos estará transportado por el tractor que arrastra al equipo recolector y conectado al mismo mediante una toma de fuerza estándar. Este grupo hidráulico (33) estará compuesto por bombas hidráulicas, depósito de aceite y sistema de filtrado del aceite. Como se indicó en el apartado anterior, el equipo recolector puede encontrarse en modo transporte o modo de operación en función de si se desplaza entre fincas o se encuentra trabajando. Resumiendo, en modo de transporte: • Tanto el vibrador (9) como el paraguas (10) se encuentran orientados en el sentido del avance del equipo, ya que el soporte (8) se encuentra plegado 90° debido a que el cilindro hidráulico (26) que gestiona su movimiento se encuentra extendido • Los brazos (18) del vibrador (9) se encuentran cerrados • La barra de tiro (1) se encuentra orientada horizontalmente mediante el cilindro hidráulico (3) que gestiona su movimiento de tal forma que el equipo recolector no sobresalga de la anchura del tractor • La barra de tiro (1) se encuentra orientada verticalmente mediante la extensión del cilindro hidráulico (2) que gestiona su movimiento para elevar al equipo recolector • Las ruedas (14) del equipo recolector elevan a éste mediante la extensión de los cilindros hidráulicos (15) asociados a este movimiento En el modo de operación: • Tanto el vibrador (9) como el paraguas (10) se encuentran orientados en el sentido perpendicular al avance del recolector, ya que el soporte (8) se encuentra extendido debido a que el cilindro hidráulico (26) que gestiona su movimiento se encuentra recogido • Los brazos (18) del vibrador (9) se encuentran abiertos a 180° • La barra de tiro (1) se encuentra orientada horizontalmente mediante el cilindro hidráulico (3) que gestiona su movimiento de tal forma que el equipo recolector transite fuera de la estela del tractor que lo arrastra y pueda acercarse a los troncos de los árboles a recolectar • La barra de tiro (1) se encuentra orientada verticalmente mediante el cilindro hidráulico (2) que gestiona su movimiento de tal forma que el equipo recolector se encuentre muy cerca del suelo • Las ruedas (14) del equipo recolector descienden a éste mediante la contracción de los cilindros hidráulicos (15) asociados a este movimiento El controlador lógico que dispone el equipo recolector, a petición del usuario, realiza estas acciones de forma automática. Una vez que el equipo recolector ha sido configurado en modo de operación ya se encuentra configurado para comenzar la recolección de los árboles. En este punto, los brazos (18) del vibrador (9) se encuentran abiertos y las lonas y barras (34) del paraguas (10) se encuentran recogidas. Además, el bastidor interior (6) se encuentra completamente recogido dentro del bastidor exterior (5) y por lo tanto el cilindro hidráulico (7) que controla este movimiento se encuentra completamente recogido. El proceso de recolección de cada árbol comienza cuando el palpador mecánico detecta el tronco y manda una señal eléctrica al controlador lógico para que inicie simultáneamente las siguientes acciones: • Activa unas electroválvulas para que las dos conexiones hidráulicas del cilindro hidráulico (7) que gestiona el movimiento del bastidor telescópico queden conectadas con el tanque del grupo de presión hidráulico (33) • Activa el freno de las ruedas (14) del recolector para que se detenga frente al árbol a vibrar. Esto provoca que el bastidor interior (6) comienza a salir del bastidor exterior (5) y por tanto el cilindro hidráulico (7) comienza a extenderse • Inicia el cierre de la pinza el vibrador (9) • Inicia el movimiento de avance del paraguas (10) extendiendo el cilindro hidráulico (25) lo que provoca que el pequeño bastidor interior (23) salga del bastidor exterior (24) • Inicia el despliegue de las barras (34) y lonas del paraguas (10) Cuando los brazos (18) del vibrador (9) se han ceñido completamente al árbol, el paraguas (10) ha llegado al final de su avance y las barras (34) del paraguas (10) se han desplegado completamente, el controlador lógico inicia el vibrado del árbol. El tiempo durante el cual el controlador lógico mantendrá la señal de vibrado será establecido por el operador. Sin embargo, y como ya se indicó anteriormente, este equipo posee un sistema de seguridad que permite limitar el tiempo de vibrado para evitar daños en los árboles. Para este fin se dispone de un sensor ubicado en el bastidor exterior (5) que detecta cuando el bastidor interior (6) está llegando al final de su avance. Finalizado el tiempo de vibrado definido por el operador o en caso de parada de la vibración por motivos de seguridad, el controlador lógico del equipo recolector inicia las siguientes acciones: • Inicia la recogida de las barras (34) y lonas del paraguas (10) • Inicia el movimiento de retroceso del paraguas (10) recogiendo el cilindro hidráulico (25) lo que provoca que el pequeño bastidor interior (23) se introduzca en el bastidor exterior (24) • Inicia la apertura de la pinza el vibrador (9) • Desactiva el freno de las ruedas (14) del recolector • Activa la recogida del cilindro hidráulico (7) que gestiona el movimiento del bastidor telescópico, lo que provoca que el bastidor interior (6) se introduzca en el bastidor exterior (5) y que el equipo vuelva a su longitud original Como ya se ha citado, el equipo recolector permite la instalación de un paraguas (35) y un vibrador (36) de construcción tradicional o convencional. Para realizar esta instalación, se debe sustituir el paraguas (10) , el vibrador (9) y el soporte (8) donde se montan estos componentes originales e instalar otro soporte (37) más pequeño cuya articulación se realiza junto al bastidor exterior (5) . Este nuevo soporte adaptado (37) permite el giro del paraguas (35) y el vibrador convencional (36) junto al bastidor exterior (5) de tal forma que las dimensiones el equipo recolector durante el transporte se reduzcan lo máximo posible. De esta forma, el soporte (8) original cuya forma en posición de trabajo recuerda a una bisagra extendida se reduce notablemente. La parte del soporte original (8) comprendida entre el bastidor exterior (5) y el eje de giro desaparece, ya que el soporte adaptado (37) realiza el giro junto al bastidor exterior (5) . Para realizar este giro y poder modificar la posición del paraguas (35) y el vibrador convencional (36) , pasando del modo transporte al modo operación, se utiliza el cilindro hidráulico (38) . Acoplado al soporte adaptado (37) se encuentra el sistema telescópico responsable de hacer avanzar o retroceder al paraguas convencional (35) cuando se encuentra frente al árbol a vibrar. Este sistema telescópico está conformado por un doble bastidor interior (39) que transcurre por un doble bastidor exterior (40) con la ayuda de un cilindro hidráulico (41) que gestiona sus movimientos. Montado sobre el extremo del doble bastidor interior (39) se encuentra un chasis (42) que puede configurarse y adaptarse para poder ser acoplado a cualquier paraguas comercial. La operativa del equipo recolector dotado de un paraguas (35) y vibrador convencional (36) es similar a la operativa comentada anteriormente, con la salvedad que una vez que el equipo se ha detenido frente al árbol a vibrar, primero se aproxima el paraguas convencional (35) , extendiéndose el cilindro hidráulico (41) , y posteriormente el vibrador convencional (36) se ciñe al tronco. El equipo recolector dotado con el paraguas (10) y vibrador (9) de diseño optimizado pueden iniciar simultáneamente los movimientos de aproximación del paraguas y cierre del vibrador. Por el contrario, una vez finalizada la vibración, primero comienza la apertura de los brazos del vibrador convencional (36) y posteriormente se inicia el movimiento de retroceso del paraguas (35) . De esta forma, quedan suficientemente descritas las partes y funciones del equipo recolector. Es importante remarcar, que la descripción efectuada tan sólo se ajusta a un ejemplo de realización preferente y que todas las variaciones de detalle asociadas a formas o tamaños quedan igualmente protegidas.
Publicaciones:
ES2963847 (02/04/2024) - A1 Solicitud de patente con informe sobre el estado de la técnica
Eventos:
En fecha 04/12/2023 se realizó Registro Instancia de Solicitud
En fecha 05/12/2023 se realizó Admisión a Trámite
En fecha 05/12/2023 se realizó Aceptación Tramitación CAP
En fecha 05/12/2023 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 05/12/2023 se realizó Superado examen de oficio
En fecha 20/03/2024 se realizó Realizado IET
En fecha 21/03/2024 se realizó 1109P_Comunicación Traslado del IET
En fecha 02/04/2024 se realizó Publicación Solicitud
En fecha 02/04/2024 se realizó Publicación Folleto Solicitud con IET (A1)
Pagos:
04/12/2023 - Pago Tasas IET
+ ES-2963847_A11.- Equipo recolector en continuo de árboles, arrastrado, dotado de un grupo de presión hidráulico (33) suspendido del vehículo tractor que lo arrastra, una barra de tiro (1) orientable horizontal y verticalmente, un vibrador (9) cuyos brazos (18) se abren a 180° y un paraguas invertido (10) de tamaño optimizado, con dos ruedas (14) ubicadas en la parte trasera del equipo con capacidad de frenado, de elevación y de ser orientadas, dispone de un sistema aspiración para el transporte de los frutos desde el paraguas (10) hasta un depósito de almacenamiento (12) , el cual, tiene capacidad de ser vaciado por gravedad mediante un mecanismo de tijera (31) , posee un elemento sensor que detecta la presencia de árboles y un controlador lógico que gestiona los ciclos de vibrado y limita el tiempo máximo de vibración, caracterizado porque: • dispone de un bastidor telescópico, que a su vez está conformado por un bastidor exterior (5) que contiene a un bastidor interior (6) que se desplaza por el interior del primero. El movimiento del bastidor interior (6) a través del bastidor exterior (5) es controlado mediante un cilindro hidráulico (7) . El bastidor telescópico posee la capacidad de variar su longitud consiguiendo sincronizar el movimiento continuo del vehículo tractor con el trabajo discontinuo y estático del recolector • la barra de tiro (1) está montada sobre un soporte articulado (4) que a su vez está unido al bastidor interior (6) • en la parte trasera del bastidor exterior (5) se instala un chasis (11) que soporta el depósito de almacenamiento (12) de frutos y un eje (13) para las ruedas (14) del equipo • posee un soporte articulado (8) , montado sobre el bastidor exterior (5) , con forma de bisagra extendida que sustenta el vibrador (9) y el paraguas invertido (10) . El soporte articulado (8) tiene la capacidad de plegarse 90° girando el conjunto paraguas (10) y vibrador (9) y reduciendo la anchura del equipo recolector en los desplazamientos • el paraguas (10) está montado sobre un sistema telescópico que, a su vez, se instala sobre el mismo soporte (8) del vibrador (9) . Este sistema telescópico está conformado por un pequeño bastidor interior (23) que transcurre por un bastidor exterior (24) con la ayuda de un cilindro hidráulico (25) 2.- Equipo recolector en continuo de árboles, según la reivindicación 1, caracterizado porque el vibrador dispone en sus brazos (18) de un sistema que permite la libre articulación de unos soportes (19) para sus tacos (20) de goma. La articulación está compuesta de un eje (21) dispuesto de forma longitudinal a los soportes (19) de los tacos (20) y de casquillos (22) . 3.- Equipo recolector en continuo de árboles, según la reivindicación 1, caracterizado porque dispone de un sistema orientado a ayudar en el guiado al conductor del vehículo tractor que arrastra el recolector. El sistema posee tres palpadores mecánicos de distintas longitudes ubicados uno encima del otro de forma vertical. En función del número de palpadores que detectan el tronco el árbol a vibrar el sistema puede corregir el desplazamiento lateral del equipo recolector actuando sobre la barra de tiro (1) . 4.- Equipo recolector en continuo de árboles, según la reivindicación 1, caracterizado porque permite la instalación de un paraguas (35) y un vibrador (36) de construcción tradicional o convencional. Para realizar esta instalación, se sustituye el paraguas (10) , el vibrador (9) y el soporte (8) donde se montan estos componentes originales y se instala otro soporte (37) más pequeño cuya articulación se realiza junto al bastidor exterior (5) . Acoplado al soporte adaptado (37) se encuentra un sistema telescópico destinado a provocar el avance o retroceso del paraguas convencional (35) frente al árbol a vibrar. Este sistema telescópico está conformado por un doble bastidor interior (39) que transcurre por un doble bastidor exterior (40) con la ayuda de un cilindro hidráulico (41) que gestiona sus movimientos. Montado sobre el extremo del doble bastidor interior (39) se encuentra un chasis (42) con la capacidad de ser configurado para poder ser acoplado a cualquier paraguas comercial.
Los productos y servicios protegidos por este registro son:
A01D 46/26
Descripciones:
+ ES-2963847_A1 EQUIPO RECOLECTOR EN CONTINUO DE ÁRBOLES SECTOR DE LA TÉCNICA El campo de aplicación de este equipo recolector se encuadra dentro de la fabricación de equipos recolectores de frutos. El objeto de la invención es la de describir un nuevo equipo recolector arrastrado, con un novedoso sistema de vibrado y recogida de fruto, de tal forma, que el tractor o vehículo que tira del equipo no se detiene durante la operación y, sin embargo, el equipo recolector si se detiene en cada uno de los árboles para realizar las funciones de vibrado y recogida del fruto en estático. Además, el equipo consigue grandes velocidades de recolección en continuo, dispone de gran versatilidad, funcionamiento simple, fabricación económica y un reducido tamaño. El equipo recolector ha sido concebido para trabajar de forma continua y está compuesto de un vibrador tradicional, el cual ha sido construido con la peculiaridad que sus brazos se abren hasta formar un ángulo de 180° y dispone de una mayor capacidad de adaptación al árbol porque permite el libre giro de los tacos. Posee un paraguas invertido para la recolección del fruto derribado por el vibrador, el cual, se desplaza hacia delante o hacia atrás, en la dirección perpendicular al avance del equipo recolector, según los brazos del vibrador se abran o cierren para ceñirse al árbol a vibrar. También dispone de un bastidor extensible el cual puede aumentar o disminuir su longitud de forma telescópica. Por otro lado, tanto el vibrador como el paraguas tienen la capacidad de plegarse y recogerse para disminuir el tamaño ocupado en los desplazamientos entre fincas. El recolector dispone de un sistema de aspiración para conducir los frutos derribados hacia un depósito acumulador situado en la parte trasera del equipo. En caso que los frutos derribados posean capota el equipo dispone de un sistema descapotador ubicado en el paraguas invertido. Al tratarse de un equipo arrastrado, este dispone de una barra de tiro orientable con capacidad de moverse vertical y horizontalmente y de dos ruedas ubicadas en la parte trasera del equipo con capacidad de ser orientadas para reducir la superficie ocupada en el giro del equipo en las cabeceras. El equipo tiene capacidad para trabajar de forma automática y para tal fin dispone de un sensor para detectar la presencia del árbol a vibrar y de varios sensores para ayudar al conductor en su guiado, los cuales transmiten sus señales a un controlador lógico que gestiona la operativa del mismo. ANTECEDENTES DE LA INVENCIÓN Existen numerosas publicaciones que describen equipos de recolección, particularmente pueden destacarse las siguientes, • ES2911112A1 • ES2630833A1 • ES1047154U • ES1047707U • ES1167210U • ES2652322A1 • ES2567528A1 • ES2293777A1 En ninguno de estos documentos se ha encontrado referencias a un equipo recolector arrastrado, dotado de un paraguas invertido con capacidad de desplazamientos de avance y retroceso, de un vibrador que junto con el paraguas dispongan de giro para plegarse en los desplazamientos y de un bastidor telescópico que permita el trabajo de recolección del equipo de forma estática en cada uno de los árboles mientras que el tractor que tira de él no precisa detenerse, obteniéndose así una recolección en continuo. EXPLICACIÓN DE LA INVENCIÓN El nuevo equipo recolector es de tipo arrastrado, unido a un tractor o similar mediante una barra de tiro. La barra de tiro puede orientarse, permitiendo el desplazamiento vertical con el objeto de bien descender el equipo para facilitar los trabajos de recolección o bien elevar el mismo para permitir los desplazamientos en los cabeceros o entre parcelas. Igualmente, la barra de tiro permite el desplazamiento horizontal, de esta forma, el equipo recolector puede desplazarse lateralmente respecto al tractor que tira de él, permitiendo que el tractor circule por el centro de las calles que forman las filas de árboles a recolectar y el equipo recolector lo haga muy próximo a los árboles. La barra de tiro está montada sobre un soporte articulado, que también contiene a los cilindros hidráulicos de orientación de la misma. El soporte articulado está unido a un chasis o bastidor que tiene la capacidad de variar su longitud de forma telescópica, debido a que está conformado por un bastidor exterior que contine a otro bastidor que se desplaza por su interior. El movimiento del bastidor interior a través del exterior es controlado mediante un cilindro hidráulico. El soporte articulado de la barra de tiro está unido al bastidor interior, mientras que sobre el bastidor exterior se monta el soporte del vibrador y del paraguas y en su parte trasera alberga el chasis que soporta el depósito y el eje de las ruedas del equipo. Aunque se ha indicado que el bastidor telescópico está formado por un bastidor exterior y otro interior, dentro de este último puede a su vez instalarse otro bastidor en su interior, acción que puede repetirse sucesivamente, dotando al ecolector de más de una prolongación de su bastidor telescópico y multiplicando por tanto su capacidad para extenderse. El movimiento de cada uno de los bastidores interiores instalados estará gestionado mediante un cilindro hidráulico. Para facilitar la comprensión del funcionamiento de la invención, de ahora en adelante, se considerará el uso de un único bastidor interior. Las dos ruedas del equipo disponen de sistemas de frenado y tienen capacidad para desplazarse verticalmente, permitiendo descender la parte posterior del equipo durante la recolección y elevar la misma para los desplazamientos en cabeceros o entre fincas. Igualmente, tienen posibilidad de giro a derechas o izquierdas permitiendo que el equipo recolector pueda circular por las mismas rodadas que el tractor durante el giro en las cabeceras y así reducir la superficie ocupada por el conjunto tractor y equipo recolector. El vibrador está montado mediante elementos elásticos en un soporte, el cual a su vez está unido al bastidor exterior del equipo. La forma de ese soporte, en su posición de trabajo, recuerda a la de una bisagra extendida. El citado vibrador, en cuanto a su sistema de vibrado, posee una operativa convencional, aunque se ha optado por un diseño que permite que los brazos del mismo puedan abrirse 180°. Por otro lado, y debido a que el equipo opera de forma automática, con el objeto de impedir daños en las cortezas, se ha optado por permitir el libre giro de los tacos de goma en el eje perpendicular al árbol a vibrar. Para lograr esta acción, el soporte de los tacos de goma está unido a los brazos del vibrador mediante una articulación. La articulación está compuesta de un eje dispuesto de forma longitudinal a los soportes de los tacos y de casquillos que rodean al citado eje y se encuentran soldados tanto en los soportes como en los brazos. El sistema de recogida del fruto está conformado por un paraguas invertido en cuyo diseño se han optimizado sus dimensiones y se ha dotado de capacidad para desplazarse, avanzando o retrocediendo con la finalidad de albergar completamente al árbol en su interior y que con sus brazos cerrados genera una estanqueidad perfecta que impide que se pierda fruto. El paraguas está ubicado justo en la parte superior del vibrador y está montado sobre un sistema telescópico que, a su vez, se instala sobre el mismo soporte del vibrador. Este sistema telescópico está conformado por un pequeño bastidor interior que transcurre por un bastidor exterior con la ayuda de un cilindro hidráulico que gestiona su movimiento. De esta forma, el paraguas tiene la capacidad de desplazarse respecto de la posición ocupada por el vibrador. Durante la operativa del equipo, tanto el paraguas como el vibrador están orientados de forma perpendicular al sentido de avance del recolector. Sin embargo, durante el transporte ambos componentes se orientan en la misma dirección del avance con el objeto de disminuir el volumen ocupado. Esto es posible porque el soporte que alberga el vibrador y el paraguas se pliega girando 90°. En cada uno de los dos brazos del paraguas se dispone de sendos tomillos sinfín que evacúan el fruto recogido hacia la parte trasera donde se encuentra otro tornillo sinfín que desplaza el fruto hacia uno de los lados del paraguas. Justo en este lado del paraguas, y en el exterior del mismo, es donde se instala el descapotador de frutos en caso de ser necesario. Para trasladar los frutos desde el paraguas o desde el descapotador, si este estuviera instalado, hasta el depósito de almacenamiento se utiliza un sistema de transporte neumático compuesto por un conducto flexible y una bomba de vacío movida por un motor hidráulico. Esta bomba de vacío encargada de realizar la succión se encuentra instalada en el interior del depósito de almacenamiento. Una vez que el depósito se ha llenado de fruto, este se descarga elevándose desde la parte trasera del equipo y llegando a una altura suficiente para poder verter su carga por gravedad a un remolque agrícola o equivalente. Para poder realizar la operación de descarga del depósito, el vibrador y el paraguas deben encontrarse en posición de trabajo, es decir, perpendiculares a la dirección del avance. El recolector trabaja completamente de forma automática y para tal fin dispone de un palpador mecáni comenzar el ciclo de vibrado y recolección del fruto. De igual forma, pueden utilizarse otro tipo de sensores para detectar la presencia del árbol. Por otro lado, y para ayudar en el guiado al conductor del tractor que arrastra el recolector, el equipo dispone de tres palpadores mecánicos de distintas longitudes ubicados uno encima del otro de forma vertical. De esta forma, cuando el tronco pasa por delante de este grupo de sensores pueden darse cuatro casos. • Los tres palpadores (tamaño corto, medio y largo) detectan la presencia del árbol. Esto significa que el recolector está demasiado cerca del tronco. En este caso el sistema de control modificará suavemente la orientación de la barra de tiro del equipo con el objeto de separarse del tronco. • Dos palpadores (tamaño medio y largo) detectan la presencia del árbol. Esto significa que el recolector está en la franja de separación idónea de trabajo. En este caso el sistema de control no modificará la orientación de la barra de tiro del equipo. • Un palpador (tamaño largo) detecta la presencia del árbol. Esto significa que el recolector está demasiado lejos del tronco. En este caso el sistema de control modificará suavemente la orientación de la barra de tiro del equipo con el objeto de acercarse al tronco. • Ningún palpador detecta la presencia del árbol. El sistema de control no realizará ninguna acción. Este sistema de ayuda al guiado está instalado en la parte delantera del bastidor interior. Toda la gestión del equipo recolector se realiza con la ayuda de un controlador lógico que activa y desactiva las electroválvulas hidráulicas. El grupo hidráulico, compuesto de bombas hidráulicas, depósito de aceite y sistema de filtrado de aceite, está suspendido de los brazos de tiro del tractor que arrastra el equipo recolector. Las bombas que generan el caudal hidráulico para todas las necesidades del equipo son movidas mediante la toma de fuerza del tractor. Una vez que se han descrito los componentes del recolector se explicará el funcionamiento y operativa en continuo del mismo, de tal forma que pueda comprenderse como el tractor o vehículo que tira del equipo no se detiene durante la operación y, sin embargo, el recolector se detiene en cada uno de los árboles para realizar las funciones de vibrado y recogida del fruto en estático. Cuando el equipo llega a una parcela y se dispone a iniciar la recolección, el usuario debe configurar el equipo pasando de modo transporte a modo de operación. En el modo de transporte: • Tanto el vibrador como el paraguas se encuentran orientados en el sentido del avance del equipo, con el objeto de reducir la anchura del equipo • Los brazos del vibrador se encuentran cerrados, con el objeto de conseguir la menor anchura posible • La barra de tiro se encuentra orientada horizontalmente de tal forma que el equipo recolector transita por detrás del tractor que lo arrastra, evitando que sobresalga por alguno de los lados y que por tanto el conjunto tractor-recolector ocupe más anchura de la necesaria • La barra de tiro se encuentra orientada verticalmente de tal forma que el equipo recolector se encuentra lo más elevado del suelo posible • Las ruedas del equipo recolector elevan a éste a su máxima altura En el modo de operación: • Tanto el vibrador como el paraguas se encuentran orientados en el sentido perpendicular al avance del recolector, con el objeto de poder recolectar los árboles desde el lateral del equipo • Los brazos del vibrador se encuentran abiertos a 180° • La barra de tiro se encuentra orientada horizontalmente de tal forma que el equipo recolector transita fuera de la estela del tractor que lo arrastra y, por tanto, sobresaliendo por el lado cuya fila de árboles va a ser recolectada • La barra de tiro se encuentra orientada verticalmente de tal forma que el equipo recolector se encuentra muy cerca del suelo • Las ruedas del equipo recolector descienden a éste muy cerca del suelo Por tanto, el usuario debe orientar el soporte del vibrador y paraguas y ajustar la altura del equipo disminuyendo la distancia hasta el suelo, actuando sobre la barra de tiro y las ruedas traseras. Posteriormente, debe modificar la orientación de la barra de tiro con el objeto de que el recolector pueda desplazarse lateralmente respecto al tractor y poder aproximarse a los troncos mientras que el tractor transita por el centro de las filas de árboles. Estas acciones asociadas al cambio de modo de transporte a modo de operación también pueden ser realizadas de forma automática por el controlador lógico. Al aproximarse el recolector al árbol a vibrar, los brazos del vibrador se encuentran abiertos y las lonas y barras del paraguas se encuentran recogidas. Por otro lado, el bastidor interior se encuentra completamente recogido dentro del bastidor exterior y, por tanto, el cilindro hidráulico que gestiona su movimiento se encuentra completamente recogido. Este cilindro hidráulico es de doble efecto por lo que tiene dos conexiones hidráulicas, una para que el fluido hidráulico extienda el cilindro y otra para que lo contraiga. Cuando el palpador mecánico detecta al árbol, éste manda una señal eléctrica al controlador el cual inicia simultáneamente las siguientes acciones: • Une mediante electroválvulas las dos conexiones hidráulicas del cilindro hidráulico que gestiona el movimiento del bastidor telescópico y las pone en conexión directa con el tanque del grupo de presión hidráulico. De esta forma el movimiento en el cilindro sólo dependerá de las fuerzas externas que actúen sobre él • Activa el freno de las ruedas traseras del recolector para detener a éste frente al árbol a vibrar. Como el tractor no se detiene durante la operación, el bastidor interior comienza a salir del bastidor exterior y por tanto el cilindro hidráulico comienza a extenderse • Inicia el cierre de la pinza del vibrador, ya que el tronco del árbol se encuentra justo enfrente de éste • Inicia el movimiento de avance del paraguas invertido en dirección al árbol a recolectar • Inicia el despliegue de las barras y lonas del paraguas invertido. Una vez que la pinza del vibrador se ha ceñido completamente al árbol, que el paraguas ha llegado al final de su carrera quedando completamente el árbol en su interior y que las barras del paraguas y lonas se han desplegado completamente, el controlador activa el vibrado del árbol. El tiempo de vibrado es indicado por el usuario. Sin embargo, este equipo posee un sistema de seguridad que puede limitar el tiempo de vibrado. Durante el tiempo de vibrado del árbol, el equipo recolector se encuentra detenido en el árbol, pero el tractor sigue avanzado, produciéndose una extensión telescópica del bastidor. Para evitar daños en el árbol asociados a que la citada extensión llegue a su fin sin que haya finalizado la vibración del árbol, el equipo dispone de un sensor o detector de seguridad ubicado cerca del final de la carrera de xtensión del bastidor. Una vez que ha concluido el tiempo de vibrado marcado por el usuario o en caso de activarse el sensor de seguridad, el controlador del equipo inicia las siguientes acciones: • Inicia la recogida de las barras y lonas del paraguas recolector • Inicia el movimiento de retroceso del paraguas invertido • Inicia la apertura de la pinza el vibrador • Desactiva el freno de las ruedas traseras del recolector • Activa la recogida del cilindro hidráulico que gestiona el movimiento del bastidor telescópico, lo que provoca que el bastidor interior se introduzca en el bastidor exterior y que el equipo vuelva a su longitud original Como ya se ha citado, en el diseño del paraguas y del vibrador utilizados en este equipo se han optimizado las dimensiones y las formas, obteniendo un paraguas de pequeñas dimensiones y un vibrador con la capacidad de abrir sus brazos hasta los 180°. En cuanto a su disposición relativa, el vibrador se instala "por debajo" del paraguas. Sin embargo, los paraguas tradicionales poseen dimensiones mucho mayores, ya que albergan en su interior al vibrador. En este caso, en cuanto a la disposición relativa, el vibrador está instalado "por encima" del paraguas. Por otro lado, este equipo recolector permite la instalación de un paraguas y un vibrador de construcción tradicional. Para realizar esta operación, se debe sustituir el paraguas, el vibrador y el soporte donde se montan estos componentes, los cuales han sido diseñados específicamente para esta aplicación e instalar otro soporte de dimensiones mucho más reducidas y cuyo efecto bisagra se realiza más cerca del bastidor exterior. Esta opción permite utilizar cualquier paraguas y vibrador tradicional en este equipo recolector en continuo y con ello multiplicar el rendimiento del sistema tradicional. Evidentemente, también supone una gran ventaja económica para los propietarios de un paraguas y vibrador tradicional, ya que pueden disponer de un sistema de recolección en continuo completamente automatizado ahorrándose parte de la inversión. El equipo recolector dotado de un paraguas y vibrador tradicional es completamente funcional. De igual forma que el paraguas de diseño optimizado tiene un sistema telescópico para avanzar o retroceder frente al árbol a recolectar, el conjunto formado por el paraguas tradicional y vibrador tradicional también dispone de un sistema telescópico muy robusto para avanzar frente al tronco del árbol a recolectar y lograr que éste quede en su interior para que pueda ser abrazado por el vibrador y rodeado por el paraguas. Este sistema telescópico está conformado por un doble bastidor interior que transcurre por un doble bastidor exterior con la ayuda de un cilindro hidráulico que gestiona sus movimientos. El doble bastidor telescópico está montado sobre el soporte con efecto bisagra solidario al bastidor exterior del equipo recolector. La operativa del equipo recolector dotado de un paraguas y vibrador convencional es similar a la indicada anteriormente con la salvedad que una vez que el equipo se ha detenido frente al árbol a vibrar, primero se aproxima el conjunto paraguas-vibrador y posteriormente se inicia el cierre de los brazos del vibrador para ceñirse al tronco. De igual forma, una vez finalizada la vibración, primero se abren los brazos del vibrador y posteriormente se inicia el movimiento de retroceso del conjunto paraguas-vibrador. Sin embargo, la utilización de un paraguas y vibrador tradicional en lugar de los diseñados y optimizados para este equipo tendría las siguientes desventajas: • Mayor anchura de transporte del equipo recolector, al utilizar un paraguas de dimensiones superiores • Mayor longitud del equipo recolector, al utilizar un paraguas de dimensiones superiores y un soporte de dimensiones más reducidas cuyo efecto bisagra se realiza más cerca del bastidor exterior • Menor velocidad de trabajo. El equipo recolector con el vibrador de diseño optimizado, una vez que se detiene frente al árbol a recolectar puede iniciar la maniobra de amarre al árbol, mientras que equipado con un vibrador tradicional primero debe aproximarse hasta el tronco del árbol y posteriormente amarrarse a él. BREVE DESCRIPCIÓN DE LOS DIBUJOS Para comprender mejor las ventajas y peculiaridades de la invención, se acompaña una serie de figuras que ilustran la forma de realización preferente de la misma. Estas figuras sólo se anexan a forma de ejemplo y no tienen carácter limitante. La figura 1 representa de forma esquemática el vibrador diseñado específicamente para el equipo recolector. Se muestra con los brazos completamente cerrados y abiertos. La figura 2 representa de forma esquemática una vista frontal de los brazos de vibrador, concretamente la articulación que disponen los tacos de goma y como se adaptan a los troncos de los árboles, aunque éstos no se encuentren completamente verticales La figura 3 representa de forma esquemática una vista lateral del vibrador y el paraguas del equipo recolector en configuración de operación. El vibrador tiene sus brazos abiertos a 180° y el paraguas se encuentra con su bastidor telescópico recogido. Ambos elementos se encuentran frente al árbol a recolectar. La figura 4 representa de forma esquemática la otra vista lateral del vibrador y el paraguas del equipo recolector en configuración de operación. En esta vista ueden observarse elementos que no pueden ser vistos en la figura 3. La figura 5 representa de forma esquemática una vista lateral del vibrador y el paraguas del equipo recolector en configuración de operación. El vibrador tiene sus brazos completamente cerrados y el paraguas se encuentra con su bastidor telescópico extendido. La figura 6 representa de forma esquemática una vista lateral del vibrador y el paraguas del equipo recolector en configuración de operación. El vibrador tiene sus brazos completamente cerrados y el paraguas se encuentra con su bastidor telescópico extendido y sus barras completamente desplegadas. Se observa el árbol a recolectar y como es abrazado por el vibrador y rodeado por el paraguas. La figura 7 representa de forma esquemática una vista frontal del equipo recolector. No aparece representado el depósito de almacenamiento de los frutos para que puedan apreciarse otros elementos del recolector. La figura 8 representa de forma esquemática la vista superior del equipo recolector en configuración de transporte. No aparece representado el depósito de almacenamiento de los frutos para que puedan apreciarse otros elementos del recolector. La figura 9 representa de forma esquemática el depósito de almacenamiento de frutos y su montaje en el chasis del equipo recolector. Se representa en posición de operación y en posición de descarga. La figura 10 representa de forma esquemática la vista superior del equipo recolector en configuración de operación. Aparece con los brazos del vibrador abiertos a 180° y el paraguas se encuentra con su bastidor telescópico recogido. La figura 11 representa de forma esquemática la vista superior del equipo recolector en configuración de operación. Aparece con los brazos del vibrador completamente cerrados y el paraguas se encuentra con su bastidor telescópico extendido y sus barras completamente desplegadas. También se representa esquemáticamente el tractor que lo arrastra y el grupo hidráulico que porta. La figura 12 representa de forma esquemática la vista superior del equipo recolector dotado de un conjunto paraguas-vibrador tradicional en configuración de transporte. La figura 13 representa de forma esquemática la vista superior del equipo recolector dotado de un conjunto paraguas-vibrador tradicional en configuración de operación. Aparece con los brazos del vibrador tradicional biertos y el paraguas se encuentra con su doble bastidor telescópico extendido y sus barras completamente desplegadas REALIZACIÓN PREFERENTE DE LA INVENCIÓN A continuación, se describirá con un mayor detalle la realización preferente del objeto de la invención. Como se ha indicado anteriormente, el nuevo equipo recolector es de tipo arrastrado y se encuentra acoplado a un tractor mediante una barra de tiro (1) . La barra de tiro (1) se orienta para permitir el desplazamiento vertical y elevar el equipo recolector con la ayuda de un cilindro hidráulico (2) . Igualmente, la barra de tiro (1) permite el desplazamiento horizontal con el objeto que el equipo recolector puede desplazarse lateralmente respecto al tractor que tira de él y así circular junto a los troncos de los árboles. Este movimiento de la barra de tiro (1) es realizado con la ayuda de un cilindro hidráulico (3) . Tanto la barra de tiro (1) como los cilindros hidráulicos (2) (3) están montados sobre un soporte articulado (4) . El soporte articulado (4) de la barra de tiro (1) está unido a un bastidor telescópico, que a su vez está conformado por un bastidor exterior (5) que contiene a otro bastidor interior (6) que se desplaza a través del primero. El movimiento del bastidor interior (6) a través del bastidor exterior (5) es controlado mediante un cilindro hidráulico (7) . El soporte articulado (4) de la barra de tiro (1) está unido al bastidor interior (6) , mientras que sobre el bastidor exterior (5) se monta un soporte articulado (8) con forma de bisagra extendida que sustenta un vibrador (9) y un paraguas invertido (10) . En la parte trasera del bastidor exterior (5) se instala un chasis (11) que soporta el depósito de almacenamiento (12) de frutos y el eje (13) de las ruedas (14) del equipo. Las dos ruedas (14) del equipo disponen de sistemas de frenado y tienen capacidad para desplazarse verticalmente, con el objeto de elevar el equipo recolector. Este movimiento se realiza con la ayuda de dos cilindros hidráulicos (15) . Igualmente, las ruedas (14) pueden ser orientadas para mejorar los giros en las cabeceras de las fincas. Esta orientación es controlada mediante un cilindro hidráulico (16) . El vibrador (9) está montado mediante elementos elásticos (17) en el soporte articulado (8) . Es un vibrador convencional, aunque permite que sus brazos (18) puedan abrirse 180°. También dispone en sus brazos (18) de un sistema que permite la libre articulación de los soportes (19) de los tacos (20) de goma. La articulación está compuesta de un eje (21) dispuesto de forma longitudinal a los soportes (19) de los tacos (20) y de casquillos (22) . La recogida del fruto se realiza mediante un paraguas invertido (10) que tiene la capacidad de desplazarse, avanzando o retrocediendo durante la operativa del equipo recolector. Para lograr esta acción, el paraguas (10) está montado obre un sistema telescópico que, a su vez, se instala sobre el mismo soporte (8) del vibrador (9) . Este sistema telescópico está conformado por un pequeño bastidor interior (23) que transcurre por un bastidor exterior (24) con la ayuda de un cilindro hidráulico (25) . Como se indicó anteriormente, durante la operativa del equipo, tanto el paraguas (10) como el vibrador (9) están orientados de forma perpendicular al sentido de avance del recolector. Sin embargo, durante el transporte, ambos componentes se orientan en la misma dirección del avance. Esto es posible porque el soporte (8) que alberga el vibrador (9) y el paraguas (10) se pliega en forma de bisagra girando 90°. Este movimiento de articulación del soporte (8) se realiza mediante un cilindro hidráulico (26) . Por otro lado, en cada uno de los dos brazos del paraguas (10) se dispone de sendos tornillos sinfín (27) que transportan el fruto hacia otro tornillo sinfín (28) ubicado en la parte trasera que a su vez concentra todo el fruto en un lateral del paraguas (10) . Todos los tornillos sinfín (27) (28) se mueven mediante motores hidráulicos (29) . Para transportar los frutos desde esta esquina del paraguas (10) o desde un descapotador, si éste estuviera instalado en este punto, hasta el depósito de almacenamiento (12) se utiliza un sistema de aspiración compuesto por un conducto flexible (30) y una bomba de vacío ubicada en el depósito (12) . Cuando el depósito de almacenamiento (12) se ha llenado de fruto, éste es vaciado mediante un mecanismo de tijera (31) movido por dos cilindros hidráulicos (32) . La descarga se produce por gravedad ya que el depósito de almacenamiento (12) se eleva hasta una altura suficiente para poder verter su carga a un remolque agrícola. Como ya se ha indicado, el recolector trabaja completamente de forma automática y con el objeto de detectar la presencia de los árboles e iniciar el ciclo de recolección se dispone de un palpador mecánico. Igualmente, para ayudar en el guiado al conductor del tractor que arrastra el recolector, el equipo dispone de tres palpadores mecánicos que mandan señales a un controlador lógico para que éste modifique la orientación de la barra de tiro (1) , si fuera necesario. Este sistema de ayuda al guiado está instalado en el soporte articulado (4) de la barra de tiro (1) . El citado controlador lógico realiza toda la gestión del equipo recolector mediante la activación y desactivación de electroválvulas hidráulicas. El grupo hidráulico (33) responsable que generar el caudal de fluido hidráulico necesario para el funcionamiento de todos los sistemas hidráulicos estará transportado por el tractor que arrastra al equipo recolector y conectado al mismo mediante una toma de fuerza estándar. Este grupo hidráulico (33) estará compuesto por bombas hidráulicas, depósito de aceite y sistema de filtrado del aceite. Como se indicó en el apartado anterior, el equipo recolector puede encontrarse en modo transporte o modo de operación en función de si se desplaza entre fincas o se encuentra trabajando. Resumiendo, en modo de transporte: • Tanto el vibrador (9) como el paraguas (10) se encuentran orientados en el sentido del avance del equipo, ya que el soporte (8) se encuentra plegado 90° debido a que el cilindro hidráulico (26) que gestiona su movimiento se encuentra extendido • Los brazos (18) del vibrador (9) se encuentran cerrados • La barra de tiro (1) se encuentra orientada horizontalmente mediante el cilindro hidráulico (3) que gestiona su movimiento de tal forma que el equipo recolector no sobresalga de la anchura del tractor • La barra de tiro (1) se encuentra orientada verticalmente mediante la extensión del cilindro hidráulico (2) que gestiona su movimiento para elevar al equipo recolector • Las ruedas (14) del equipo recolector elevan a éste mediante la extensión de los cilindros hidráulicos (15) asociados a este movimiento En el modo de operación: • Tanto el vibrador (9) como el paraguas (10) se encuentran orientados en el sentido perpendicular al avance del recolector, ya que el soporte (8) se encuentra extendido debido a que el cilindro hidráulico (26) que gestiona su movimiento se encuentra recogido • Los brazos (18) del vibrador (9) se encuentran abiertos a 180° • La barra de tiro (1) se encuentra orientada horizontalmente mediante el cilindro hidráulico (3) que gestiona su movimiento de tal forma que el equipo recolector transite fuera de la estela del tractor que lo arrastra y pueda acercarse a los troncos de los árboles a recolectar • La barra de tiro (1) se encuentra orientada verticalmente mediante el cilindro hidráulico (2) que gestiona su movimiento de tal forma que el equipo recolector se encuentre muy cerca del suelo • Las ruedas (14) del equipo recolector descienden a éste mediante la contracción de los cilindros hidráulicos (15) asociados a este movimiento El controlador lógico que dispone el equipo recolector, a petición del usuario, realiza estas acciones de forma automática. Una vez que el equipo recolector ha sido configurado en modo de operación ya se encuentra configurado para comenzar la recolección de los árboles. En este punto, los brazos (18) del vibrador (9) se encuentran abiertos y las lonas y barras (34) del paraguas (10) se encuentran recogidas. Además, el bastidor interior (6) se encuentra completamente recogido dentro del bastidor exterior (5) y por lo tanto el cilindro hidráulico (7) que controla este movimiento se encuentra completamente recogido. El proceso de recolección de cada árbol comienza cuando el palpador mecánico detecta el tronco y manda una señal eléctrica al controlador lógico para que inicie simultáneamente las siguientes acciones: • Activa unas electroválvulas para que las dos conexiones hidráulicas del cilindro hidráulico (7) que gestiona el movimiento del bastidor telescópico queden conectadas con el tanque del grupo de presión hidráulico (33) • Activa el freno de las ruedas (14) del recolector para que se detenga frente al árbol a vibrar. Esto provoca que el bastidor interior (6) comienza a salir del bastidor exterior (5) y por tanto el cilindro hidráulico (7) comienza a extenderse • Inicia el cierre de la pinza el vibrador (9) • Inicia el movimiento de avance del paraguas (10) extendiendo el cilindro hidráulico (25) lo que provoca que el pequeño bastidor interior (23) salga del bastidor exterior (24) • Inicia el despliegue de las barras (34) y lonas del paraguas (10) Cuando los brazos (18) del vibrador (9) se han ceñido completamente al árbol, el paraguas (10) ha llegado al final de su avance y las barras (34) del paraguas (10) se han desplegado completamente, el controlador lógico inicia el vibrado del árbol. El tiempo durante el cual el controlador lógico mantendrá la señal de vibrado será establecido por el operador. Sin embargo, y como ya se indicó anteriormente, este equipo posee un sistema de seguridad que permite limitar el tiempo de vibrado para evitar daños en los árboles. Para este fin se dispone de un sensor ubicado en el bastidor exterior (5) que detecta cuando el bastidor interior (6) está llegando al final de su avance. Finalizado el tiempo de vibrado definido por el operador o en caso de parada de la vibración por motivos de seguridad, el controlador lógico del equipo recolector inicia las siguientes acciones: • Inicia la recogida de las barras (34) y lonas del paraguas (10) • Inicia el movimiento de retroceso del paraguas (10) recogiendo el cilindro hidráulico (25) lo que provoca que el pequeño bastidor interior (23) se introduzca en el bastidor exterior (24) • Inicia la apertura de la pinza el vibrador (9) • Desactiva el freno de las ruedas (14) del recolector • Activa la recogida del cilindro hidráulico (7) que gestiona el movimiento del bastidor telescópico, lo que provoca que el bastidor interior (6) se introduzca en el bastidor exterior (5) y que el equipo vuelva a su longitud original Como ya se ha citado, el equipo recolector permite la instalación de un paraguas (35) y un vibrador (36) de construcción tradicional o convencional. Para realizar esta instalación, se debe sustituir el paraguas (10) , el vibrador (9) y el soporte (8) donde se montan estos componentes originales e instalar otro soporte (37) más pequeño cuya articulación se realiza junto al bastidor exterior (5) . Este nuevo soporte adaptado (37) permite el giro del paraguas (35) y el vibrador convencional (36) junto al bastidor exterior (5) de tal forma que las dimensiones el equipo recolector durante el transporte se reduzcan lo máximo posible. De esta forma, el soporte (8) original cuya forma en posición de trabajo recuerda a una bisagra extendida se reduce notablemente. La parte del soporte original (8) comprendida entre el bastidor exterior (5) y el eje de giro desaparece, ya que el soporte adaptado (37) realiza el giro junto al bastidor exterior (5) . Para realizar este giro y poder modificar la posición del paraguas (35) y el vibrador convencional (36) , pasando del modo transporte al modo operación, se utiliza el cilindro hidráulico (38) . Acoplado al soporte adaptado (37) se encuentra el sistema telescópico responsable de hacer avanzar o retroceder al paraguas convencional (35) cuando se encuentra frente al árbol a vibrar. Este sistema telescópico está conformado por un doble bastidor interior (39) que transcurre por un doble bastidor exterior (40) con la ayuda de un cilindro hidráulico (41) que gestiona sus movimientos. Montado sobre el extremo del doble bastidor interior (39) se encuentra un chasis (42) que puede configurarse y adaptarse para poder ser acoplado a cualquier paraguas comercial. La operativa del equipo recolector dotado de un paraguas (35) y vibrador convencional (36) es similar a la operativa comentada anteriormente, con la salvedad que una vez que el equipo se ha detenido frente al árbol a vibrar, primero se aproxima el paraguas convencional (35) , extendiéndose el cilindro hidráulico (41) , y posteriormente el vibrador convencional (36) se ciñe al tronco. El equipo recolector dotado con el paraguas (10) y vibrador (9) de diseño optimizado pueden iniciar simultáneamente los movimientos de aproximación del paraguas y cierre del vibrador. Por el contrario, una vez finalizada la vibración, primero comienza la apertura de los brazos del vibrador convencional (36) y posteriormente se inicia el movimiento de retroceso del paraguas (35) . De esta forma, quedan suficientemente descritas las partes y funciones del equipo recolector. Es importante remarcar, que la descripción efectuada tan sólo se ajusta a un ejemplo de realización preferente y que todas las variaciones de detalle asociadas a formas o tamaños quedan igualmente protegidas.
Publicaciones:
ES2963847 (02/04/2024) - A1 Solicitud de patente con informe sobre el estado de la técnica
Eventos:
En fecha 04/12/2023 se realizó Registro Instancia de Solicitud
En fecha 05/12/2023 se realizó Admisión a Trámite
En fecha 05/12/2023 se realizó Aceptación Tramitación CAP
En fecha 05/12/2023 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 05/12/2023 se realizó Superado examen de oficio
En fecha 20/03/2024 se realizó Realizado IET
En fecha 21/03/2024 se realizó 1109P_Comunicación Traslado del IET
En fecha 02/04/2024 se realizó Publicación Solicitud
En fecha 02/04/2024 se realizó Publicación Folleto Solicitud con IET (A1)
Pagos:
04/12/2023 - Pago Tasas IET
Fuente de la información
Parte de la información aquí publicada es pública puesto que ha sido obtenida de la Oficina de Propiedad Industrial de los diferentes países el 28/04/2024 y por lo tanto puede ser que la información no esté actualizada.Parte de la información aquí mostrada ha sido calculada por nuestro sistema informático y puede no ser veraz.
Privacidad
Si considera que al información aquí publicada afecta a su privacidad y desea que eliminemos la información aquí publicada envíe un email a info@patentes-y-marcas.com o rellene el formulario que encontrará aquí.Información sobre el registro de patente nacional por Equipo recolector en continuo de árboles con el número P202331013
El registro de patente nacional por Equipo recolector en continuo de árboles con el número P202331013 fue solicitada el 04/12/2023. Se trata de un registro en España por lo que este registro no ofrece protección en el resto de países. El registro Equipo recolector en continuo de árboles con el número P202331013 fue solicitada por JESÚS ÁNGEL LÓPEZ-BRAVO ÁLVAREZ. El registro [modality] por Equipo recolector en continuo de árboles con el número P202331013 está clasificado como A01D 46/26 según la clasificación internacional de patentes.
Otras invenciones solicitadas en la clasificación internacional de patentes A01D 46/26.
Es posible conocer invenciones similares al campo de la técnica se refiere. El registro de patente nacional por Equipo recolector en continuo de árboles con el número P202331013 está clasificado con la clasificación A01D 46/26 por lo que si se desea conocer más registros con la clasificación A01D 46/26 clicar aquí.Patentes en España
Es posible conocer todas las invenciones publicadas en España entre las que se encuentra el registro patente nacional por Equipo recolector en continuo de árboles. Nuestro portal www.patentes-y-marcas.com ofrece acceso a las publicaciones de patentes en España. Conocer las patentes registradas en un país es importante para saber las posibilidades de fabricar, vender o explotar una invención en España.Patentes registradas en la clase A
Es posible conocer todas las patentes registradas en la clase A (NECESIDADES CORRIENTES DE LA VIDA) entre las que se encuentra la patente Equipo recolector en continuo de árboles con el número P202331013. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase A01
Es posible conocer todas las patentes registradas en la clase A01 (AGRICULTURA; SILVICULTURA; CRIA; CAZA; CAPTURA; PESCA) entre las que se encuentra la patente Equipo recolector en continuo de árboles con el número P202331013. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase A01D
Es posible conocer todas las patentes registradas en la clase A01D (RECOLECCION; SIEGA) entre las que se encuentra la patente Equipo recolector en continuo de árboles con el número P202331013. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.
¿Tienes alguna duda?
Escribe tu consulta y te responderemos rápida y gratuitamente.

Otras patentes similares
 P202331002
P202331002 P202331006
P202331006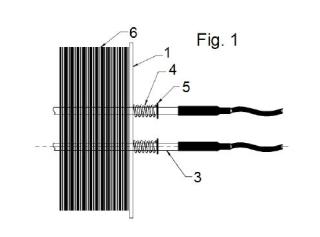 P202331015
P202331015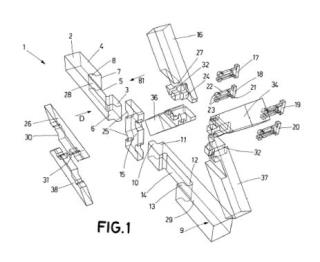
Profesionales Recomendados
Barcelona
933182440
España
933182440
España

Barcelona
+34 93 362 16 97
España
+34 93 362 16 97
España

Barcelona
932 593 600
España
932 593 600
España







