


- Home /
- Publicaciones de patentes /
- Dispositivo amortiguador para vehículos
Patente nacional por "Dispositivo amortiguador para vehículos"
Este registro ha sido solicitado por
Persona física
a través del representanteADOLFO LINARES RUEDA
Contacto
- Estado: A punto de caducar
- País:
- España
- Fecha solicitud:
- 22/04/2022
- Número solicitud:
-
P202230367
- Número publicación:
-
ES2955102
- Fecha de concesión:
-
- Inventores:
-
Persona física
- Datos del titular:
-
Persona física
- Datos del representante:
-
Adolfo LINARES RUEDA
- Clasificación Internacional de Patentes:
- F16F 9/53,F16F 9/516,F16F 9/512
- Clasificación Internacional de Patentes de la publicación:
- F16F 9/53,F16F 9/516,F16F 9/512
- Fecha de vencimiento:
Quiero registrar una patente

Reivindicaciones:
+ ES-2955102_A11. Dispositivo (1) amortiguador para vehículos que comprende un cilindro (2) con un eje longitudinal (EL) lleno de un fluido no newtoniano tipo "shear-thickening" (STF) a lo largo del cual se desplaza longitudinalmente un émbolo (3) , donde una sección transversal del émbolo (3) es menor que una sección transversal interior del cilindro (2) para permitir el paso del STF a través de un espacio entre dicho émbolo (3) y una pared interior del cilindro (2) , caracterizado por que el émbolo (3) está configurado de tal manera que la fuerza que el STF opone al movimiento del émbolo (3) en un primer sentido de desplazamiento es diferente de la fuerza que el STF opone al movimiento del émbolo (3) en un segundo sentido de desplazamiento opuesto al primero. 2. Dispositivo (1) amortiguador para vehículos de acuerdo con la reivindicación 1, donde el émbolo (3) tiene una geometría variable que alterna entre una primera geometría cuando el émbolo (3) se desplaza en el primer sentido de desplazamiento y una segunda geometría cuando el émbolo (3) se desplaza en el segundo sentido de desplazamiento 3. Dispositivo (1) amortiguador para vehículos de acuerdo con la reivindicación 2, donde el émbolo (3) está configurado para alternar entre la primera geometría y la segunda geometría únicamente a causa de la fuerza ejercida por el STF sobre dicho émbolo (3) cuando éste se desplaza longitudinalmente a lo largo del cilindro (2) . 4. Dispositivo (1) amortiguador para vehículos de acuerdo con la reivindicación 3, donde el émbolo (3) comprende un cuerpo (31) y al menos una parte móvil (32) sustancialmente rígida unida al cuerpo (31) y configurada para adoptar una primera posición cuando el émbolo (3) se desplaza en el primer sentido de desplazamiento y una segunda posición cuando el émbolo (3) se desplaza en el segundo sentido de desplazamiento. 5. Dispositivo (1) amortiguador para vehículos de acuerdo con la reivindicación 4, donde la parte móvil (32) está unida al cuerpo (31) de manera rotativa. 6. Dispositivo (1) amortiguador para vehículos de acuerdo con la reivindicación 5, donde la parte móvil (32) es rotativa con relación al cuerpo (31) alrededor de un eje transversal (ET) , estando el eje transversal (ET) contenido en un plano perpendicular al eje longitudinal (EL) a lo largo del cual se desplaza el émbolo (3) . 7. Dispositivo (1) amortiguador para vehículos de acuerdo con la reivindicación 6, donde la parte móvil (32) comprende al menos una placa móvil conectada al cuerpo (31) a través de una articulación rotativa alrededor del eje transversal (ET) , de manera que cuando el émbolo (3) se desplaza en el primer sentido de desplazamiento, la fuerza ejercida por el STF provoca que la placa móvil adopte la primera posición, mientras que cuando el émbolo (3) se desplaza en el segundo sentido de desplazamiento, la fuerza ejercida por el STF provoca que la placa móvil adopte la segunda posición. 8. Dispositivo (1) amortiguador para vehículos de acuerdo con la reivindicación 7 donde, en la primera posición, la placa móvil es perpendicular al eje longitudinal (EL) mientras que, en la segunda posición, la placa móvil es paralela al eje longitudinal (EL) 9. Dispositivo (1) amortiguador para vehículos de acuerdo con la reivindicación 5, donde la parte móvil (32) es giratoria con relación al cuerpo (31) alrededor de un eje paralelo al eje longitudinal (EL) . 10. Dispositivo (1) amortiguador para vehículos de acuerdo con la reivindicación 9, donde la parte móvil (32) comprende al menos una primera placa (32a) y una segunda placa (32b) , donde al menos una placa de entre la primera placa (32a) y la segunda placa (32b) está conectada al cuerpo (31) a través de una articulación giratoria alrededor del eje paralelo al eje longitudinal (EL) de manera que, cuando el émbolo (3) se desplaza en el primer sentido de desplazamiento, la fuerza ejercida por el STF provoca que dicha al menos una placa gire hasta una posición en la que las placas primera (32a) y segunda (32b) están separadas una de la otra, mientras que cuando el émbolo (3) se desplaza en el segundo sentido de desplazamiento, la fuerza ejercida por el STF provoca que dicha al menos una placa gire hasta una posición en la que las placas primera (32a) y segunda (32b) están adosadas una a la otra. 11. Dispositivo (1) amortiguador para vehículos de acuerdo con la reivindicación 4, donde la parte móvil (32) está unida al cuerpo (31) de manera deslizante. 12. Dispositivo (1) amortiguador para vehículos de acuerdo con la reivindicación 11, donde la parte móvil (32) comprende un elemento deslizante a lo largo de una dirección paralela al eje longitudinal (EL) . 13. Dispositivo (1) amortiguador para vehículos de acuerdo con la reivindicación 12, donde l cuerpo (31) del émbolo (3) tiene forma cilindrica y elemento deslizante (32) es telescópico con relación a dicho cuerpo (31) , de manera que cuando el émbolo (3) se desplaza en el primer sentido de desplazamiento, la fuerza ejercida por el STF provoca que el elemento deslizante (32) salga del cuerpo (31) mientras que, cuando el émbolo (3) se desplaza en el segundo sentido de desplazamiento, la fuerza ejercida por el STF provoca que el elemento deslizante (32) se aloje dentro del cuerpo (31) . 14. Dispositivo (1) amortiguador para vehículos de acuerdo con la reivindicación 3, donde el émbolo (3) comprende el cuerpo (31) y una parte deformable (33) unida al cuerpo (3) , donde la parte deformable (33) está configurada para adoptar una primera forma cuando el émbolo (3) se desplaza en el primer sentido de desplazamiento y una segunda forma cuando el émbolo (3) se desplaza en el segundo sentido de desplazamiento. 15. Dispositivo (1) amortiguador para vehículos de acuerdo con la reivindicación 14, donde la parte deformable (33) comprende al menos un brazo unido al cuerpo (31) y con un extremo libre orientado esencialmente a lo largo del eje longitudinal (EL) , de manera que la fuerza ejercida por el STF cuando el émbolo (3) se desplaza en el primer sentido de desplazamiento provoca que dicho brazo se abra de manera que el extremo libre se aleja del cuerpo (31) , mientras que la fuerza ejercida por el STF cuando el émbolo (3) se desplaza en el segundo sentido de desplazamiento provoca que dicho brazo se cierre de manera que el extremo libre se acerca al cuerpo (31) . 16. Dispositivo (1) amortiguador para vehículos de acuerdo con cualquiera de las reivindicaciones anteriores, donde el émbolo (3) comprende al menos un orificio a través del cual puede pasar el STF cuando dicho émbolo (3) se desplaza en al menos uno de los dos sentidos de desplazamiento.
Los productos y servicios protegidos por este registro son:
F16F 9/53 - F16F 9/516 - F16F 9/512
Descripciones:
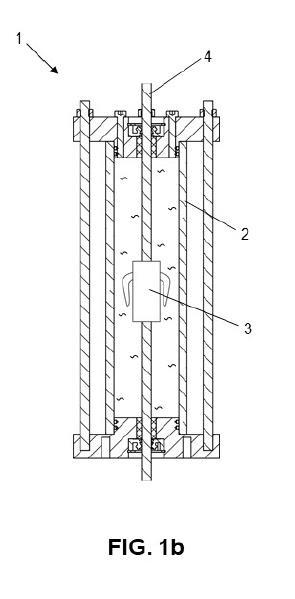
+ ES-2955102_A1 Dispositivo amortiguador para vehículos OBJETO DE LA INVENCIÓN La presente invención pertenece en general al campo de la automoción, y más particularmente a la amortiguación de vibraciones en los vehículos. El objeto de la presente invención es un nuevo dispositivo amortiguador que tiene una geometría asimétrica, preferentemente variable, y aún más preferentemente variable de manera pasiva. De ese modo, se obtiene un nivel de amortiguación diferente en función del sentido de desplazamiento del vástago del amortiguador. ANTECEDENTES DE LA INVENCIÓN Estabilidad, control y funcionamiento seguro de un vehículo dependen en gran medida de su sistema de suspensión. Un nivel excesivo de vibraciones en el vehículo puede llegar a comprometer no sólo el confort del mismo sino poner incluso en riesgo la seguridad de sus ocupantes. Actualmente los vehículos cuentan con sistemas de suspensión activos, en algunos casos altamente sofisticados desde el punto de vista mecánico, que les permiten optimizar su rendimiento en carretera garantizando la máxima seguridad a sus ocupantes. Los amortiguadores para vehículos más simples presentes en el mercado son dispositivos pasivos que emplean aceites minerales o sintéticos como fluido de trabajo. Los dispositivos de más alta gama permiten la regulación del grado de amortiguamiento mediante el empleo de sistemas activos que restringen en mayor o menor grado el paso del aceite a través del sistema de válvulas del amortiguador, modificando de esta forma el comportamiento dinámico del mismo. En la última década se han introducido en el mercado otros dispositivos amortiguadores que permiten una regulación activa del grado de amortiguamiento según las condiciones de la conducción. Algunos de ellos están basados en el empleo de aceites sintéticos y un sistema mecatrónico incorporado en el cuerpo del propio amortiguador; mientras que otros, más modernos y aún más sofisticados, emplean los denominados fluidos magneto-reológicos o electro-reológicos. Estos fluidos cambian sus propiedades físicas cuando se hace actuar un campo magnético o corriente eléctrica respectivamente sobre el mismo. Aunque ambas pciones tienen un gran potencial a la hora de mejorar activamente el control y la estabilidad del vehículo, presentan algunos problemas que complican su implantación en el mercado, tales como: - Aumento significativo del peso del amortiguador. - Complejidad técnica en su construcción. - Mayor necesidad de mantenimiento. - Problemas de precipitados de las partículas magnéticas en el caso de los fluidos magneto-reológicos ante periodos prolongados de inactividad del amortiguador. - Necesidad de un sistema de control activo y red de sensores en el vehículo. - Mayores costes de producción. - Desgaste de sus elementos móviles. Es en este punto donde los denominados fluidos no-newtonianos tipo "shear-thickening" cobran interés. Los fluidos no newtonianos tipo "shear-thickening" (STF, Shear-Thickening Fluid) , a veces denominados en español fluidos "dilatantes" o de "espesamiento por cizallamiento", son fluidos que varían su viscosidad en función de la velocidad de cortante aplicada sobre los mismos. Una velocidad de cortante elevada provoca un efecto de compactación de las partículas del fluido que hacen aumentar la resistencia del mismo al esfuerzo de cortante aplicado. Una vez remite dicho esfuerzo, el fluido vuelve a sus propiedades originales. Puede encontrarse una descripción de las características principales de este tipo de fluidos en la página web https://es.wikipedia.org/wiki/Dilatante. En la literatura científica pueden encontrarse diversos trabajos donde se aplican fluidos "shear thickening" a la reducción de vibraciones en sistemas mecánicos por medio de amortiguadores con geometrías de vástago fijas y simétricas. Una geometría de vástago simétrica implica que el comportamiento del amortiguador es igual a tracción y compresión. Además, puesto que la geometría también es fija, es decir, inalterable, solo puede conseguirse una capacidad de regulación de la fuerza de amortiguamiento mediante la alteración de las propiedades del STF utilizado. El documento US2016238100A1 describe un amortiguador de vibraciones basado en un fluido shear-thickening. Concretamente, el amortiguador está formado fundamentalmente por un cilindro lleno de un fluido shear-thickening a lo largo del cual se desplaza un émbolo plano. El cilindro comprende un tabique que lo divide en dos partes que se comunican entre sí a través de un orificio. Cuando el émbolo se desplaza en uno u otro sentido, el fluido shear-thickening s obligado a pasar a través del orificio para proporcionar el efecto de amortiguación deseado. En definitiva, existe aún en este campo la necesidad de amortiguadores que permitan un mayor control de las características de la amortiguación y que, al mismo tiempo, sean sencillos y más fáciles de fabricar y manejar. DESCRIPCIÓN DE LA INVENCIÓN El dispositivo amortiguador de la presente invención resuelve los problemas anteriores gracias a una configuración del émbolo con una geometría asimétrica, preferiblemente variable, y aún más preferiblemente variable únicamente en respuesta a la interacción con el propio STF. Estas características permiten dotar al dispositivo amortiguador de la presente invención de una mayor flexibilidad en las características de la amortiguación, permitiendo que ésta sea diferente en función del sentido de desplazamiento del émbolo, sin que ello implique un aumento de la complejidad del dispositivo. A continuación, se definen algunos términos que se emplearán a lo largo de la presente descripción. • STF (Shear Thickening Fluid) : Se trata de un fluido cuya viscosidad aumenta con la velocidad de deformación por cizallamiento. En español también puede denominarse como "fluido espesante por cizallamiento" o "fluido dilatante", aunque el término más empleado en la documentación científica es "fluido shear thickening" o directamente sus siglas en inglés STF. • Eje longitudinal: En un amortiguador dotado de un cilindro por cuyo interior discurre un émbolo, el eje longitudinal coincide con el eje principal del cilindro a lo largo de la cual se desplaza el émbolo. Naturalmente, el émbolo se desplaza a lo largo de una dirección paralela al eje longitudinal en un primer sentido o en un segundo sentido opuesto al primero. • Eje transversal: Se trata de un eje contenido en un plano perpendicular al eje longitudinal descrito anteriormente. • Superficie frontal: Este término se utiliza de manera relativa para comparar la resistencia al desplazamiento de varias geometrías de émbolo, donde una superficie frontal mayor mplica una mayor área de la planta del émbolo con relación a la dirección longitudinal y una superficie frontal menor implica una menor área de la planta del émbolo con relación a la dirección longitudinal. Naturalmente, cuanto mayor la superficie frontal, mayor es la resistencia al desplazamiento del émbolo. • Superficie lateral: Este término se utiliza también de manera relativa para comparar la resistencia al desplazamiento de varias geometrías de émbolo, donde una superficie lateral mayor implica una mayor área del émbolo orientada en dirección radial y una superficie lateral menor implica una menor área del émbolo orientada en dirección radial. Naturalmente, cuanto mayor la superficie lateral, mayor es la resistencia al desplazamiento del émbolo. La presente invención está dirigida a un dispositivo amortiguador para vehículos que comprende un cilindro con un eje longitudinal lleno de un STF a lo largo del cual se desplaza longitudinalmente un émbolo. Además, una sección transversal del émbolo es menor que una sección transversal interior del cilindro para permitir el paso del STF a través de un espacio entre dicho émbolo y una pared interior del cilindro. Naturalmente, el émbolo estará conectado a un vástago longitudinal que sobresale por uno o por ambos extremos del cilindro y que se conecta al componente sobre el que se aplica la amortiguación. El efecto de amortiguación se obtiene como consecuencia de la interacción entre el émbolo y el STF que tiene lugar a causa del movimiento del STF de un extremo a otro del cilindro en respuesta a los desplazamientos del émbolo en uno u otro sentido a lo largo del eje longitudinal. La configuración descrita en el párrafo anterior responde esencialmente a las características de los dispositivos amortiguadores basados en fluidos STF conocidos de la técnica anterior. Sin embargo, a diferencia de los mismos, en el dispositivo amortiguador de la presente invención, el émbolo está configurado de tal manera que la fuerza que el STF opone al movimiento del émbolo en un primer sentido de desplazamiento es diferente de la fuerza que el STF opone al movimiento del émbolo en un segundo sentido de desplazamiento opuesto al primero. Existen diferentes posibilidades de configuración del émbolo que permiten conseguir las características mencionadas. Una opción es el uso de un émbolo que tiene una geometría no simétrica con relación a un plano transversal que pasa por su centro, por ejemplo un émbolo que tiene un extremo longitudinal con una primera forma y un extremo longitudinal opuesto con una segunda forma diferente de la primera. Un émbolo de este tipo podría tener, por jemplo, el primer extremo con una forma plana perpendicular al eje longitudinal y el segundo extremo con una forma semiesférica. Otra posibilidad sería el empleo de un émbolo cuya forma general fuese esencialmente igual en ambos extremos pero donde uno de ellos estuviese dotado de características superficiales diferentes, como por ejemplo rugosidades, muescas, orificios, o similares. En cualquiera de estos casos, el efecto de la asimetría en cuanto a forma o características superficiales es que la amortiguación obtenida cuando el émbolo se desplaza en un sentido es diferente de la obtenida cuando el émbolo se desplaza en el sentido opuesto. Esta configuración es ventajosa porque permite seleccionar de manera independiente las características de la amortiguación en uno u otro sentido de desplazamiento, dotando así de una mayor flexibilidad de funcionamiento al amortiguador de la invención. Como se ha mencionado más arriba, es posible conseguir una amortiguación de diferentes características en función del sentido de desplazamiento utilizando un émbolo con una geometría asimétrica estática, es decir, una geometría asimétrica (por ejemplo, en cuanto a forma o características superficiales) que permanece inalterable durante el uso del dispositivo. Sin embargo, de acuerdo con una realización particularmente preferida de la invención, el émbolo del dispositivo amortiguador tiene una geometría variable que alterna entre una primera geometría cuando el émbolo se desplaza en el primer sentido de desplazamiento y una segunda geometría cuando el émbolo se desplaza en el segundo sentido de desplazamiento. El cambio de geometría hace que la resistencia contra el desplazamiento del émbolo que provoca el STF sea diferente en función del sentido de desplazamiento. La resistencia puede variar como consecuencia de un cambio en la superficie frontal del émbolo, de un cambio en la superficie lateral del émbolo, o de una combinación de ambas. En efecto, la referencia a una geometría variable implica que el émbolo dispone de uno o varios elementos cuya forma cambia en función de si se está desplazando en uno u otro sentido. Para provocar este cambio de forma, es posible utilizar medios activos, es decir, medios externos no directamente relacionados con el funcionamiento básico del amortiguador y adecuadamente sincronizados para provocar el cambio en la geometría del émbolo en función de su sentido de desplazamiento. Estos medios externos podrían comprender imanes permanentes, electroimanes, elementos eléctricos, neumáticos o hidráulicos o, en general, cualquier medio capaz de modificar la geometría del émbolo de manera sincronizada con los cambios en el sentido de su desplazamiento. También se incluyen aquí medios en combinación con materiales capaces de modificar las características superficiales del émbolo e una manera suficientemente rápida, ya que las características superficiales del émbolo también tienen un efecto en la amortiguación. Esta configuración es ventajosa porque dota al dispositivo amortiguador de la invención de una flexibilidad aún mayor en cuanto a las características de la amortiguación en uno u otro sentido. Como se ha mencionado, el cambio de geometría del émbolo puede conseguirse empleando medios activos. Sin embargo, de acuerdo con otra realización preferida de la invención, el émbolo del dispositivo amortiguador está configurado para alternar entre la primera geometría y la segunda geometría únicamente a causa de la fuerza ejercida por el STF sobre dicho émbolo cuando éste se desplaza longitudinalmente a lo largo del cilindro. Se utiliza en este documento el término "pasivo" para hacer referencia a la capacidad de modificar la geometría del émbolo únicamente en respuesta a las fuerzas ejercidas por el STF durante su desplazamiento, sin necesidad de medios externos del tipo descrito más arriba. Es decir, en este caso el émbolo está configurado de tal modo que el cambio de geometría se produce únicamente a causa de las fuerzas fluidodinámicas sobre el émbolo que aparecen cuando éste se desplaza en uno u otro sentido de desplazamiento, sin ayuda externa de ningún tipo. Cuando el STF que envuelve al émbolo se desplaza en un sentido con relación al propio émbolo, las fuerzas que aparecen como consecuencia la interacción entre el STF y el émbolo provocan que alguna parte o elemento del émbolo adopte una determinada forma. Por el contrario, cuando el STF que envuelve al émbolo se desplaza en el sentido opuesto al anterior con relación al émbolo (a causa del cambio de sentido de desplazamiento del émbolo) , dichas fuerzas hacen que la mencionada parte o elemento del émbolo adopte una forma diferente a la anterior. El cambio de geometría se produce así de manera automática con el propio cambio de sentido de desplazamiento del émbolo, lo que asegura un correcto sincronismo. Esta configuración es particularmente ventajosa dada su mayor simplicidad con relación a otras opciones que requieren del empleo de medios activos externos al propio funcionamiento del amortiguador. Existen varios modos de conseguir que el émbolo modifique su geometría cuando cambia su sentido de desplazamiento. Se mencionan aquí dos posibilidades principales: el émbolo tiene partes móviles, o el émbolo tiene partes deformables. En este contexto, se entiende que una arte móvil es un elemento rígido que está diseñado para alternar entre dos posiciones claramente diferenciadas por medio de rotaciones, traslaciones o una combinación de rotaciones y traslaciones. Por el contrario, una parte deformable es aquella que está diseñada para cambiar de forma, ya sea elástica o plásticamente. A continuación, se describen con mayor detalle algunos ejemplos correspondientes a ambas configuraciones. 1. Partes móviles De acuerdo con esta realización preferida de la invención, el émbolo comprende un cuerpo y al menos una parte móvil sustancialmente rígida unida al cuerpo. La parte móvil está configurada para adoptar una primera posición cuando el émbolo se desplaza en el primer sentido de desplazamiento y una segunda posición cuando el émbolo se desplaza en el segundo sentido de desplazamiento. En efecto, en esta configuración el émbolo tiene partes móviles que se mueven de uno u otro modo a causa de la fuerza fluidodinámica que ejerce el STF cuando el émbolo se desplaza en uno u otro sentido. Cuando el émbolo se mueve en el primer sentido, las fuerzas fluidodinámicas causadas por la interacción con el STF provocan que la parte móvil adopte una posición tal que el émbolo en su conjunto tiene la primera geometría, mientras que cuando el émbolo se mueve en el segundo sentido, las fuerzas fluidodinámicas causadas por la interacción con el STF provocan que la parte móvil adopte una posición diferente de la anterior tal que el émbolo en su conjunto tiene la segunda geometría. El movimiento de las partes móviles podría potencialmente comprender cualquier combinación posible de traslación y rotación. Sin embargo, se describen a continuación dos realizaciones particularmente preferidas que corresponden a rotación pura y a traslación pura. 1.a Partes móviles por rotación De acuerdo con una realización particularmente preferida de la invención, la parte móvil está unida al cuerpo de manera rotativa. El cambio de geometría del émbolo se produce aquí a causa de una rotación pura de la parte móvil con relación al uerpo. En principio, la parte móvil puede rotar con relación al cuerpo alrededor de un eje orientado en cualquier dirección posible, aunque se mencionan de manera específica en este documento dos posibilidades: rotación alrededor del eje transversal, y rotación alrededor del eje longitudinal. I.a.i Rotación alrededor del eje transversal De acuerdo con otra realización preferida de la invención, la parte móvil es rotativa con relación al cuerpo alrededor de un eje transversal. Como se ha mencionado con anterioridad, el eje transversal está contenido en un plano perpendicular al eje longitudinal a lo largo del cual se desplaza el émbolo. Según una realización aún más preferida de la invención, la parte móvil comprende al menos una placa móvil, preferentemente plana, conectada al cuerpo a través de una articulación rotativa alrededor del eje transversal. Así, cuando el émbolo se desplaza en el primer sentido de desplazamiento, la fuerza ejercida por el STF provoca que la placa adopte la primera posición (posición en la que forma un primer ángulo con relación al eje longitudinal) , mientras que cuando el émbolo se desplaza en el segundo sentido de desplazamiento, la fuerza ejercida por el STF provoca que la placa adopte la segunda posición (una posición en la que forma un segundo ángulo con relación al eje longitudinal) . El diferente ángulo formado por la placa con relación a la dirección longitudinal según el sentido de desplazamiento hace que la resistencia ejercida por el STF en uno u otro sentido sea diferente. Los ángulos que forma la placa con relación al eje longitudinal en la primera y la segunda geometría podrían ser cualesquiera siempre que fuesen diferentes y, de ese modo, la resistencia ofrecida por el STF al paso del émbolo fuera diferente en función de su sentido de desplazamiento. Sin embargo, de acuerdo con otra realización preferida más de la invención, la placa móvil es perpendicular al eje longitudinal cuando está en la primera posición y es paralela al eje longitudinal cuando está en la segunda posición. Se trata de dos posiciones angulares extremas que provocan la mayor diferencia posible entre la amortiguación obtenida en uno u otro sentido de desplazamiento del émbolo. Cuando la placa es perpendicular al eje longitudinal, la resistencia fluidodinámica al movimiento es máxima, mientras que cuando la placa es paralela al eje longitudinal, la resistencia fluidodinámica al movimiento es mínima. Más adelante en este documento se describirá un ejemplo de émbolo dotado de partes móviles rotativas alrededor de un eje transversal. I.a.ii Rotación alrededor de un eje longitudinal Según otra realización preferida de la invención, la parte móvil del émbolo es giratoria con relación al cuerpo alrededor de un eje paralelo al eje longitudinal. Aún más preferentemente, la parte móvil comprende al menos una primera placa y una segunda placa, donde al menos una placa de entre la primera placa y la segunda placa está conectada al cuerpo a través de una articulación giratoria alrededor del eje paralelo al eje longitudinal. De ese modo, cuando el émbolo se desplaza en el primer sentido de desplazamiento, la fuerza ejercida por el STF provoca que dicha al menos una placa gire hasta una posición en la que las placas primera y segunda están separadas una de la otra, mientras que cuando el émbolo se desplaza en el segundo sentido de desplazamiento, la fuerza ejercida por el STF provoca que dicha al menos una placa gire hasta una posición en la que las placas primera y segunda están adosadas una a la otra. Para conseguir eso, al menos la placa giratoria puede tener una cierta inclinación con relación al eje longitudinal, adoptando así una forma similar a unas aspas o palas de una turbina que son forzadas a girar cuando un fluido (en este caso el STF) incide sobre ellas en dirección longitudinal. Más adelante en este documento se describirá un ejemplo de émbolo dotado de partes móviles rotativas alrededor de un eje longitudinal. 1.b Partes móviles por deslizamiento De acuerdo con otra realización preferida de la invención, la parte móvil del émbolo está unida al cuerpo de manera deslizante. El cambio de geometría del émbolo se produce en este caso a causa de una traslación pura de la parte móvil con relación l cuerpo. El deslizamiento podría producirse en cualquier dirección posible, incluyendo la dirección longitudinal, dirección transversal, o cualquier otra dirección no paralela a ninguna de las anteriores. Sin embargo, de acuerdo con otra realización preferida de la invención, la parte móvil comprende un elemento deslizante a lo largo de una dirección paralela al eje longitudinal. Más preferentemente, el cuerpo del émbolo tiene forma cilíndrica y elemento deslizante es telescópico con relación a dicho cuerpo. Así, cuando el émbolo se desplaza en el primer sentido de desplazamiento, la fuerza ejercida por el STF provoca que el elemento deslizante salga del cuerpo mientras que, cuando el émbolo se desplaza en el segundo sentido de desplazamiento, la fuerza ejercida por el STF provoca que el elemento deslizante se aloje dentro del cuerpo. Más adelante en este documento se describirá un ejemplo de émbolo dotado de partes móviles deslizantes. 2. Partes deformables De acuerdo con una realización preferida de la invención alternativa a las anteriores, el émbolo del dispositivo amortiguador comprende el cuerpo y una parte deformable unida al cuerpo. La parte deformable está configurada para adoptar una primera forma cuando el émbolo se desplaza en el primer sentido de desplazamiento y una segunda forma cuando el émbolo se desplaza en el segundo sentido de desplazamiento. No es imprescindible que la parte deformable sea elástica. De acuerdo con una realización particularmente preferida de la invención, la parte deformable comprende al menos un brazo unido al cuerpo y con un extremo libre orientado esencialmente a lo largo del eje longitudinal. De ese modo, la fuerza ejercida por el STF cuando el émbolo se desplaza en el primer sentido de desplazamiento provoca que dicho brazo se abra de manera que el extremo libre se aleja del cuerpo, mientras que la fuerza ejercida por el STF cuando el émbolo se desplaza en el segundo sentido de desplazamiento provoca que dicho brazo se cierre de manera que el extremo libre se acerca al cuerpo. Más adelante en este documento se describirá un ejemplo de émbolo dotado de partes deformables. De acuerdo con aún otra realización preferida, el émbolo comprende al menos un orificio a través del cual puede pasar el STF cuando dicho émbolo se desplaza en al menos uno de los dos sentidos de desplazamiento. El orificio puede estar ubicado en cualquier posición (por ejemplo, con bocas de salida situadas en los extremos del émbolo y/o en la superficie lateral del émbolo) , puede tener cualquier forma no necesariamente longitudinal rectilínea de sección constante (por ejemplo, presentar curvas y/o cambios de sección transversal) , y tener unas bocas de salida orientadas según cualquier orientación (por ejemplo, orientadas formando un ángulo con la dirección longitudinal) , siempre que el STF pase a su través en al menos uno de los dos sentidos de desplazamiento. En su versión más simple, el orificio puede ser un orificio longitudinal de sección transversal uniformemente circular que atraviesa el émbolo longitudinalmente de un extremo al otro. Sin embargo, son posibles opciones donde el orificio no tenga una dirección longitudinal rectilínea, sino que en su interior presente cambios de sección transversal. Por ejemplo, se podría diseñar un émbolo dotado de un orificio de eje longitudinal pero con forma cónica, de manera que la boca de salida en un extremo del émbolo tuviera una sección transversal mayor que la boca de salida en el extremo opuesto. De ese modo, la resistencia al desplazamiento ejercida por el orificio en uno y otro sentido de desplazamiento sería diferente. También son posibles opciones donde el orificio no tenga una dirección longitudinal rectilínea, sino que tenga una dirección inclinada con relación a la dirección longitudinal, o bien que tenga una dirección no rectilínea que incluya uno o más cambios de dirección internos. Así, un adecuado diseño de estos cambios de dirección podría servir para ajustar la resistencia ofrecida por el STF en uno o ambos sentidos de desplazamiento. Como también se ha comentado, no es necesario que el orificio tenga sus bocas de salida en los extremos del émbolo, sino que una o ambas podrían estar ubicadas en la superficie lateral del émbolo. Así, orientando adecuadamente la boca de salida ubicada en la superficie lateral, podría conseguirse que el fluido entrase en el orificio únicamente en uno de los dos sentidos de desplazamiento. Por ejemplo, podría idearse un émbolo con un orificio que tuviera una boca de salida ubicada en un extremo y la otra en la superficie lateral, y donde la boca de salida de la superficie lateral estuviese orientada en perpendicular a la dirección de desplazamiento del émbolo. Así, cuando este émbolo se desplazase en el sentido en que se ncuentra la boca de salida del extremo, el STF entraría en el orificio, pero cuando se desplazase en el sentido opuesto, el STF no entraría en el orificio. También sería posible dotar al orificio de una placa obturadora articulada a un borde o pared lateral del orificio de tal modo que la interacción con el STF provocase su cierre en uno de los dos sentidos de desplazamiento. De ese modo, cuando el émbolo se desplaza en un sentido de desplazamiento, el STF mantiene abierta la placa obturadora y el fluido entra en el orificio, mientras que cuando el émbolo se desplaza en el sentido de desplazamiento opuesto, el STF provoca el cierre de la placa obturadora y el fluido no entra en el orificio. El número de opciones en cuanto al orificio interior del émbolo es ingente, proporcionando así un gran número de posibilidades en lo que respecta al ajuste de la resistencia ejercida por el STF en uno u otro sentido de desplazamiento del émbolo. En definitiva, en la presente invención se han descrito dispositivos amortiguadores con diferentes configuraciones de émbolos. La particularidad que presentan los émbolos es que son asimétricos en función del sentido de desplazamiento, preferentemente gracias a una geometría variable, y más preferentemente donde el cambio de geometría se produce únicamente a causa de la interacción con el STF. Esto permite obtener amortiguadores muy flexibles en cuanto a las características de la amortiguación en uno u otro sentido de desplazamiento. BREVE DESCRIPCIÓN DE LOS DIBUJOS Las Figs. 1a y 1b muestran respectivamente una vista exterior en perspectiva y una sección longitudinal de un ejemplo de dispositivo de acuerdo con la presente invención. Las Figs. 2a y 2b muestran sendas vistas en perspectiva de un ejemplo de émbolo según la presente invención respectivamente en la primera y la segunda geometría. Las Figs. 3a y 3b muestran sendas vistas en perspectiva de otro ejemplo de émbolo según la presente invención respectivamente en la primera y la segunda geometría. Las Figs. 4a y 4b muestran sendas vistas en perspectiva de otro ejemplo más de émbolo según la presente invención respectivamente en la primera y la segunda geometría. Las Figs. 5a y 5b muestran sendas vistas en perspectiva de aún un ejemplo más de émbolo según la presente invención respectivamente en la primera y la segunda geometría. La Fig.6 muestra una gráfica de fuerza aplicada con relación a la velocidad de desplazamiento correspondiente a un ejemplo de dispositivo según la invención. La Fig. 7 muestra una gráfica de fuerza aplicada con relación a la distancia de desplazamiento correspondiente a un ejemplo de dispositivo según la invención. REALIZACIÓN PREFERENTE DE LA INVENCIÓN Se describen a continuación algunos ejemplos de dispositivos (1) amortiguadores según la presente invención haciendo referencia a las figuras adjuntas. En estos ejemplos, el sentido ascendente o hacia arriba coincide con el denominado "primer sentido de desplazamiento", mientras que el sentido descendente o hacia abajo coincide con el denominado "segundo sentido de desplazamiento". Las Figs. 1a y 1b muestran un ejemplo de dispositivo (1) amortiguador según la presente invención. El dispositivo (1) , cuyo aspecto exterior es similar al que presentan dispositivos amortiguadores de la técnica anterior, comprende un cilindro (2) por cuyo interior discurre un émbolo. El émbolo (3) está unido a un vástago (4) cuyos extremos sobresalen por ambos lados del cilindro (2) . El cilindro (2) está además lleno de un STF en el cual se encuentra inmerso el émbolo (3) . Además, a diferencia de lo que ocurre en otros dispositivos formados por el conjunto cilindro-émbolo/pistón, en este caso el émbolo (3) no toca las paredes interiores del cilindro (2) . Por tanto, como se aprecia en la Fig. 1b, el émbolo (3) no separa el cilindro (2) en dos cavidades herméticas separadas entre sí. Por el contrario, existe un espacio entre los bordes radialmente exteriores del émbolo (3) y las paredes interiores del cilindro (2) , de tal modo que cuando el émbolo (3) se desplaza a lo largo del cilindro (2) , el STF que rellena el cilindro (2) es obligado a pasar a través de dicho espacio de una cavidad a otra. La interacción entre el STF y el émbolo (3) durante este proceso es responsable del efecto de amortiguación proporcionado por el dispositivo (1) . Para utilizar este dispositivo (1) , normalmente el cilindro (2) está fijado de manera rígida al cuerpo del vehículo en cuestión, por ejemplo una motocicleta, mientras que el vástago (4) se fija al componente a amortiguar. Las vibraciones que se producen en dirección longitudinal se transmiten a través del vástago (4) hasta el émbolo (3) que, como consecuencia, tiende a esplazarse longitudinalmente a lo largo del cilindro (2) . La Fig. 1a muestra de manera explícita el eje longitudinal (EL) . Estas vibraciones son amortiguadas gracias al efecto del STF sobre el émbolo (3) que se ha descrito en el párrafo anterior. La Fig.2 muestra un ejemplo de émbolo (3) dotado de partes móviles por rotación con relación a un eje transversal (ET) . En particular, el émbolo (3) tiene aquí un cuerpo (31) esencialmente cilíndrico hueco, es decir, el émbolo (3) está dotado de un orificio interior cilíndrico de eje longitudinal. En un extremo superior del émbolo hay una parte móvil (32) formada por dos placas esencialmente semicirculares. Cada una de estas placas (32) es rotativa alrededor de un respectivo eje transversal (ET) y disponen de un tope posicionado adecuadamente para limitar la rotación en uno de los dos sentidos de giro. Así, cuando el émbolo (3) se desplaza hacia arriba, como se aprecia en la Fig. 2a, las fuerzas fluidodinámicas provocadas por el desplazamiento hacia abajo del STF con relación al émbolo (3) hacen que las dos placas (32) roten hasta llegar a su tope en que se encuentran contenidas en un plano horizontal, es decir, perpendicular al eje longitudinal (EL) . Además, las placas (32) están dimensionadas y posicionadas de tal modo que, cuando están en esta posición, cierran completamente la cavidad interior del cuerpo cilíndrico (31) . Por tanto, cuando el émbolo (3) se desplaza en el primer sentido (hacia arriba) , la superficie frontal es máxima, y en consecuencia la resistencia al desplazamiento ofrecida por el STF es máxima. Por el contrario, cuando el émbolo se desplaza hacia abajo, como se aprecia en la Fig. 2b, las fuerzas fluidodinámicas provocadas por el desplazamiento hacia arriba del STF con relación al émbolo (3) hacen que las dos placas roten de nuevo hasta situarse de manera natural en un plano paralelo al eje longitudinal (EL) . En esta posición, el STF puede pasar a través de la cavidad interior del cuerpo cilíndrico (31) sin que las placas (32) ofrezcan una resistencia sustancial. Por tanto, cuando el émbolo se desplaza en el segundo sentido (hacia abajo) , la superficie frontal es mínima, y en consecuencia la resistencia al desplazamiento ofrecida por el STF es mínima. La Fig. 3 muestra un ejemplo de émbolo (3) dotado de partes móviles por rotación alrededor de un eje paralelo al eje longitudinal (EL) . En este caso, el émbolo (3) está formado por un cuerpo (31) esencialmente cilíndrico orientado en dirección longitudinal del cual emergen radialmente cuatro placas (32a, 32b) . Cada una de estas placas (32a, 32b) tiene una forma esencialmente rectangular y están dispuestas esencialmente en paralelo al eje longitudinal (EL) aunque con una cierta inclinación en dirección tangencial. Esta inclinación provoca que, cuando el émbolo (3) se desplaza en dirección longitudinal, el STF ejerza sobre las mismas una fuerza que tiende a hacerlas rotar alrededor del eje longitudinal (EL) . Dos de las placas, en este ejemplo las placas (32b) , están rígidamente fijadas al cuerpo (31) , mientras que las tras dos placas, en este caso las placas (32a) están fijadas al cuerpo (31) de manera rotativa alrededor del eje longitudinal (EL) . Gracias a esta configuración, cuando el émbolo (3) se desplaza hacia arriba tal como se muestra en la Fig. 3a, las fuerzas fluidodinámicas provocadas por el desplazamiento hacia abajo del STF con relación al émbolo (3) tienden a hacer que las placas (32a) roten en el sentido opuesto a las agujas del reloj, de manera que rotan hasta la posición mostrada en la figura. Las placas (32b) , al ser fijas, se mantienen en la posición mostrada. Por tanto, la resistencia ofrecida por el STF en el primer sentido (hacia arriba) viene dada por la geometría del émbolo (3) mostrada en la Fig. 3a. Por el contrario, cuando el émbolo (3) se desplaza hacia abajo, las fuerzas fluidodinámicas provocadas por el desplazamiento hacia arriba del STF con relación al émbolo (3) tienden a hacer que las placas (32a) roten en el sentido de las agujas del reloj, llegando hasta la posición mostrada en la Fig. 3b. Como se puede apreciar, en la Fig. 3b ambas placas (32a) han rotado 90° con relación a la posición que se muestra en la Fig. 3a. Puesto que las placas (32b) no se desplazan por estar fijadas de manera fija, el resultado es que cada placa (32a) queda adosada a una correspondiente placa (32b) . Con esta segunda geometría, se aprecia claramente que hay una reducción tanto en la superficie frontal como en la superficie lateral del émbolo (3) . En consecuencia, la resistencia ofrecida por el STF en el segundo sentido (hacia abajo) dada por la geometría del émbolo (3) mostrada en la Fig. 3b es, por tanto, sensiblemente inferior a la ofrecida por el émbolo (3) con la geometría mostrada en la Fig. 3a. La Fig. 4 muestra un ejemplo de émbolo (3) dotado de partes móviles por deslizamiento a lo largo de una dirección paralela al eje longitudinal (EL) . El émbolo (3) comprende aquí un cuerpo (31) cilindrico hueco, es decir, el émbolo (3) está dotado de un orificio interior cilindrico de eje longitudinal. El émbolo (3) comprende también un conjunto de partes móviles (32) deslizantes que tienen también forma cilindrica hueca y que están dispuestas de manera telescópica con relación al cuerpo (31) y unas con relación a otras. En particular, hay tres elementos deslizantes de forma cilindrica configurados para alternar entre dos posiciones: una posición abierta en la que cada uno de los elementos cilíndricos está alojado en el elemento cilíndrico inmediatamente adyacente y donde todos ellos están, a su vez, alojados dentro del cuerpo (31) cilindrico; y una posición cerrada en la que cada elemento cilindrico sobresale ligeramente del elemento cilindrico inmediatamente adyacente y donde todos ellos sobresalen del cuerpo (31) cilindrico. Se trata esencialmente de una configuración telescópica convencional. Cuando el émbolo (3) se desplaza hacia arriba, las fuerzas fluidodinámicas provocadas por el desplazamiento hacia abajo del STF con relación al émbolo (3) impulsan los elementos deslizantes hacia abajo hasta hacer que adopten la posición abierta mostrada en la Fig. 4a. Por el contrario, cuando el émbolo se desplaza hacia abajo, las fuerzas luidodinámicas provocadas por el desplazamiento hacia arriba del STF con relación al émbolo (3) impulsan los elementos deslizantes hacia arriba hasta hacer que adopten la posición cerrada que se muestra en la Fig. 4b. El cambio de la geometría no provoca esencialmente ningún cambio en cuanto a la superficie frontal del émbolo (3) , pero sí en la superficie lateral del mismo: la superficie lateral es sensiblemente mayor en la primera geometría que en la segunda. Como consecuencia, la resistencia ofrecida por el STF en el segundo sentido (hacia abajo) dada por la geometría del émbolo (3) mostrada en la Fig. 3b es, por tanto, sensiblemente inferior a la ofrecida por el émbolo (3) con la geometría mostrada en la Fig. 3a. La Fig. 5 muestra un ejemplo de émbolo (3) dotado de partes deformables. El émbolo (3) comprende aquí un cuerpo (31) y un conjunto de al menos dos elementos deformables (33) . Los elementos deformables (33) tienen en este ejemplo forma de brazos que están rígidamente unidos al cuerpo (31) y que, tras emerger del mismo en dirección esencialmente radial, se curvan hacia arriba hasta adoptar en sus extremos una dirección esencialmente longitudinal. Cuando el émbolo (3) se desplaza hacia arriba, el desplazamiento relativo hacia abajo del STF fuerza que los brazos (33) se "abran" de tal modo que sus extremos se alejan del cuerpo (31) tal como se muestra en la Fig. 5a. Por el contrario, cuando el émbolo (3) se desplaza hacia abajo, el desplazamiento hacia arriba del STF hace que los brazos (33) se "cierren" hasta la geometría mostrada en la Fig. 5b. Los brazos (33) pueden opcionalmente ser elásticos, de manera que la geometría del émbolo (3) mostrada en la Fig. 5b sea la geometría en reposo y solo adopte la geometría mostrada en la Fig. 5a cuando el STF empuja los brazos hacia fuera durante el desplazamiento ascendente. En cualquiera de los casos, se aprecia que la superficie frontal del émbolo (3) cuando se desplaza hacia arriba (primer sentido) es mayor que cuando se desplaza hacia abajo (segundo sentido) . En este caso, además de la variación en la superficie frontal, también hay un cambio evidente en las características fluidodinámicas del émbolo (3) en función del sentido de desplazamiento. Como consecuencia, la resistencia ofrecida por el STF en el segundo sentido (hacia abajo) dada por la geometría del émbolo (3) mostrada en la Fig. 3b es, por tanto, sensiblemente inferior a la ofrecida por el émbolo (3) con la geometría mostrada en la Fig. 3a. Por último, se muestran en las Figs. 6 y 7 sendas gráficas que muestran la fuerza de amortiguación ejercida por el STF con relación respectivamente a la velocidad y al desplazamiento del émbolo (3) . En la Fig. 6 se aprecia cómo la fuerza en el émbolo (3) no es simétrica en el recorrido en compresión o en tracción (es decir, en el primer o en el segundo sentido de desplazamiento) , a diferencia de lo que ocurre en un dispositivo de amortiguación fijo simétrico del tipo convencional.
Publicaciones:
ES2955102 (28/11/2023) - A1 Solicitud de patente con informe sobre el estado de la técnica
Eventos:
En fecha 22/04/2022 se realizó Registro Instancia de Solicitud
En fecha 23/05/2022 se realizó 3585X_Registro Solicitud Prórroga de Plazos
En fecha 23/05/2022 se realizó Concesión Prórroga de Plazos
En fecha 23/05/2022 se realizó 1585X_Notificación Concesión Prórroga de Plazos
En fecha 27/05/2022 se realizó Publicación Concesión Prórroga de Plazos (BOPI)
En fecha 08/06/2022 se realizó 3003_Registro Doc. Subsanación Defectos en Admisión a Trámite Patente Invención
En fecha 13/06/2022 se realizó Admisión a Trámite
En fecha 13/06/2022 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 01/07/2022 se realizó Superado examen de oficio
En fecha 14/09/2022 se realizó Realizado IET
En fecha 20/09/2022 se realizó 1109P_Comunicación Traslado del IET
En fecha 28/11/2023 se realizó Publicación Solicitud
En fecha 28/11/2023 se realizó Publicación Folleto Solicitud con IET (A1)
En fecha 27/02/2024 se realizó PETEX_Petición de examen sustantivo
En fecha 14/03/2024 se realizó Validación petición y/o pago de examen sustantivo conforme
Pagos:
03/06/2022 - Pago Tasas IET
+ ES-2955102_A11. Dispositivo (1) amortiguador para vehículos que comprende un cilindro (2) con un eje longitudinal (EL) lleno de un fluido no newtoniano tipo "shear-thickening" (STF) a lo largo del cual se desplaza longitudinalmente un émbolo (3) , donde una sección transversal del émbolo (3) es menor que una sección transversal interior del cilindro (2) para permitir el paso del STF a través de un espacio entre dicho émbolo (3) y una pared interior del cilindro (2) , caracterizado por que el émbolo (3) está configurado de tal manera que la fuerza que el STF opone al movimiento del émbolo (3) en un primer sentido de desplazamiento es diferente de la fuerza que el STF opone al movimiento del émbolo (3) en un segundo sentido de desplazamiento opuesto al primero. 2. Dispositivo (1) amortiguador para vehículos de acuerdo con la reivindicación 1, donde el émbolo (3) tiene una geometría variable que alterna entre una primera geometría cuando el émbolo (3) se desplaza en el primer sentido de desplazamiento y una segunda geometría cuando el émbolo (3) se desplaza en el segundo sentido de desplazamiento 3. Dispositivo (1) amortiguador para vehículos de acuerdo con la reivindicación 2, donde el émbolo (3) está configurado para alternar entre la primera geometría y la segunda geometría únicamente a causa de la fuerza ejercida por el STF sobre dicho émbolo (3) cuando éste se desplaza longitudinalmente a lo largo del cilindro (2) . 4. Dispositivo (1) amortiguador para vehículos de acuerdo con la reivindicación 3, donde el émbolo (3) comprende un cuerpo (31) y al menos una parte móvil (32) sustancialmente rígida unida al cuerpo (31) y configurada para adoptar una primera posición cuando el émbolo (3) se desplaza en el primer sentido de desplazamiento y una segunda posición cuando el émbolo (3) se desplaza en el segundo sentido de desplazamiento. 5. Dispositivo (1) amortiguador para vehículos de acuerdo con la reivindicación 4, donde la parte móvil (32) está unida al cuerpo (31) de manera rotativa. 6. Dispositivo (1) amortiguador para vehículos de acuerdo con la reivindicación 5, donde la parte móvil (32) es rotativa con relación al cuerpo (31) alrededor de un eje transversal (ET) , estando el eje transversal (ET) contenido en un plano perpendicular al eje longitudinal (EL) a lo largo del cual se desplaza el émbolo (3) . 7. Dispositivo (1) amortiguador para vehículos de acuerdo con la reivindicación 6, donde la parte móvil (32) comprende al menos una placa móvil conectada al cuerpo (31) a través de una articulación rotativa alrededor del eje transversal (ET) , de manera que cuando el émbolo (3) se desplaza en el primer sentido de desplazamiento, la fuerza ejercida por el STF provoca que la placa móvil adopte la primera posición, mientras que cuando el émbolo (3) se desplaza en el segundo sentido de desplazamiento, la fuerza ejercida por el STF provoca que la placa móvil adopte la segunda posición. 8. Dispositivo (1) amortiguador para vehículos de acuerdo con la reivindicación 7 donde, en la primera posición, la placa móvil es perpendicular al eje longitudinal (EL) mientras que, en la segunda posición, la placa móvil es paralela al eje longitudinal (EL) 9. Dispositivo (1) amortiguador para vehículos de acuerdo con la reivindicación 5, donde la parte móvil (32) es giratoria con relación al cuerpo (31) alrededor de un eje paralelo al eje longitudinal (EL) . 10. Dispositivo (1) amortiguador para vehículos de acuerdo con la reivindicación 9, donde la parte móvil (32) comprende al menos una primera placa (32a) y una segunda placa (32b) , donde al menos una placa de entre la primera placa (32a) y la segunda placa (32b) está conectada al cuerpo (31) a través de una articulación giratoria alrededor del eje paralelo al eje longitudinal (EL) de manera que, cuando el émbolo (3) se desplaza en el primer sentido de desplazamiento, la fuerza ejercida por el STF provoca que dicha al menos una placa gire hasta una posición en la que las placas primera (32a) y segunda (32b) están separadas una de la otra, mientras que cuando el émbolo (3) se desplaza en el segundo sentido de desplazamiento, la fuerza ejercida por el STF provoca que dicha al menos una placa gire hasta una posición en la que las placas primera (32a) y segunda (32b) están adosadas una a la otra. 11. Dispositivo (1) amortiguador para vehículos de acuerdo con la reivindicación 4, donde la parte móvil (32) está unida al cuerpo (31) de manera deslizante. 12. Dispositivo (1) amortiguador para vehículos de acuerdo con la reivindicación 11, donde la parte móvil (32) comprende un elemento deslizante a lo largo de una dirección paralela al eje longitudinal (EL) . 13. Dispositivo (1) amortiguador para vehículos de acuerdo con la reivindicación 12, donde l cuerpo (31) del émbolo (3) tiene forma cilindrica y elemento deslizante (32) es telescópico con relación a dicho cuerpo (31) , de manera que cuando el émbolo (3) se desplaza en el primer sentido de desplazamiento, la fuerza ejercida por el STF provoca que el elemento deslizante (32) salga del cuerpo (31) mientras que, cuando el émbolo (3) se desplaza en el segundo sentido de desplazamiento, la fuerza ejercida por el STF provoca que el elemento deslizante (32) se aloje dentro del cuerpo (31) . 14. Dispositivo (1) amortiguador para vehículos de acuerdo con la reivindicación 3, donde el émbolo (3) comprende el cuerpo (31) y una parte deformable (33) unida al cuerpo (3) , donde la parte deformable (33) está configurada para adoptar una primera forma cuando el émbolo (3) se desplaza en el primer sentido de desplazamiento y una segunda forma cuando el émbolo (3) se desplaza en el segundo sentido de desplazamiento. 15. Dispositivo (1) amortiguador para vehículos de acuerdo con la reivindicación 14, donde la parte deformable (33) comprende al menos un brazo unido al cuerpo (31) y con un extremo libre orientado esencialmente a lo largo del eje longitudinal (EL) , de manera que la fuerza ejercida por el STF cuando el émbolo (3) se desplaza en el primer sentido de desplazamiento provoca que dicho brazo se abra de manera que el extremo libre se aleja del cuerpo (31) , mientras que la fuerza ejercida por el STF cuando el émbolo (3) se desplaza en el segundo sentido de desplazamiento provoca que dicho brazo se cierre de manera que el extremo libre se acerca al cuerpo (31) . 16. Dispositivo (1) amortiguador para vehículos de acuerdo con cualquiera de las reivindicaciones anteriores, donde el émbolo (3) comprende al menos un orificio a través del cual puede pasar el STF cuando dicho émbolo (3) se desplaza en al menos uno de los dos sentidos de desplazamiento.
Los productos y servicios protegidos por este registro son:
F16F 9/53 - F16F 9/516 - F16F 9/512
Descripciones:
+ ES-2955102_A1 Dispositivo amortiguador para vehículos OBJETO DE LA INVENCIÓN La presente invención pertenece en general al campo de la automoción, y más particularmente a la amortiguación de vibraciones en los vehículos. El objeto de la presente invención es un nuevo dispositivo amortiguador que tiene una geometría asimétrica, preferentemente variable, y aún más preferentemente variable de manera pasiva. De ese modo, se obtiene un nivel de amortiguación diferente en función del sentido de desplazamiento del vástago del amortiguador. ANTECEDENTES DE LA INVENCIÓN Estabilidad, control y funcionamiento seguro de un vehículo dependen en gran medida de su sistema de suspensión. Un nivel excesivo de vibraciones en el vehículo puede llegar a comprometer no sólo el confort del mismo sino poner incluso en riesgo la seguridad de sus ocupantes. Actualmente los vehículos cuentan con sistemas de suspensión activos, en algunos casos altamente sofisticados desde el punto de vista mecánico, que les permiten optimizar su rendimiento en carretera garantizando la máxima seguridad a sus ocupantes. Los amortiguadores para vehículos más simples presentes en el mercado son dispositivos pasivos que emplean aceites minerales o sintéticos como fluido de trabajo. Los dispositivos de más alta gama permiten la regulación del grado de amortiguamiento mediante el empleo de sistemas activos que restringen en mayor o menor grado el paso del aceite a través del sistema de válvulas del amortiguador, modificando de esta forma el comportamiento dinámico del mismo. En la última década se han introducido en el mercado otros dispositivos amortiguadores que permiten una regulación activa del grado de amortiguamiento según las condiciones de la conducción. Algunos de ellos están basados en el empleo de aceites sintéticos y un sistema mecatrónico incorporado en el cuerpo del propio amortiguador; mientras que otros, más modernos y aún más sofisticados, emplean los denominados fluidos magneto-reológicos o electro-reológicos. Estos fluidos cambian sus propiedades físicas cuando se hace actuar un campo magnético o corriente eléctrica respectivamente sobre el mismo. Aunque ambas pciones tienen un gran potencial a la hora de mejorar activamente el control y la estabilidad del vehículo, presentan algunos problemas que complican su implantación en el mercado, tales como: - Aumento significativo del peso del amortiguador. - Complejidad técnica en su construcción. - Mayor necesidad de mantenimiento. - Problemas de precipitados de las partículas magnéticas en el caso de los fluidos magneto-reológicos ante periodos prolongados de inactividad del amortiguador. - Necesidad de un sistema de control activo y red de sensores en el vehículo. - Mayores costes de producción. - Desgaste de sus elementos móviles. Es en este punto donde los denominados fluidos no-newtonianos tipo "shear-thickening" cobran interés. Los fluidos no newtonianos tipo "shear-thickening" (STF, Shear-Thickening Fluid) , a veces denominados en español fluidos "dilatantes" o de "espesamiento por cizallamiento", son fluidos que varían su viscosidad en función de la velocidad de cortante aplicada sobre los mismos. Una velocidad de cortante elevada provoca un efecto de compactación de las partículas del fluido que hacen aumentar la resistencia del mismo al esfuerzo de cortante aplicado. Una vez remite dicho esfuerzo, el fluido vuelve a sus propiedades originales. Puede encontrarse una descripción de las características principales de este tipo de fluidos en la página web https://es.wikipedia.org/wiki/Dilatante. En la literatura científica pueden encontrarse diversos trabajos donde se aplican fluidos "shear thickening" a la reducción de vibraciones en sistemas mecánicos por medio de amortiguadores con geometrías de vástago fijas y simétricas. Una geometría de vástago simétrica implica que el comportamiento del amortiguador es igual a tracción y compresión. Además, puesto que la geometría también es fija, es decir, inalterable, solo puede conseguirse una capacidad de regulación de la fuerza de amortiguamiento mediante la alteración de las propiedades del STF utilizado. El documento US2016238100A1 describe un amortiguador de vibraciones basado en un fluido shear-thickening. Concretamente, el amortiguador está formado fundamentalmente por un cilindro lleno de un fluido shear-thickening a lo largo del cual se desplaza un émbolo plano. El cilindro comprende un tabique que lo divide en dos partes que se comunican entre sí a través de un orificio. Cuando el émbolo se desplaza en uno u otro sentido, el fluido shear-thickening s obligado a pasar a través del orificio para proporcionar el efecto de amortiguación deseado. En definitiva, existe aún en este campo la necesidad de amortiguadores que permitan un mayor control de las características de la amortiguación y que, al mismo tiempo, sean sencillos y más fáciles de fabricar y manejar. DESCRIPCIÓN DE LA INVENCIÓN El dispositivo amortiguador de la presente invención resuelve los problemas anteriores gracias a una configuración del émbolo con una geometría asimétrica, preferiblemente variable, y aún más preferiblemente variable únicamente en respuesta a la interacción con el propio STF. Estas características permiten dotar al dispositivo amortiguador de la presente invención de una mayor flexibilidad en las características de la amortiguación, permitiendo que ésta sea diferente en función del sentido de desplazamiento del émbolo, sin que ello implique un aumento de la complejidad del dispositivo. A continuación, se definen algunos términos que se emplearán a lo largo de la presente descripción. • STF (Shear Thickening Fluid) : Se trata de un fluido cuya viscosidad aumenta con la velocidad de deformación por cizallamiento. En español también puede denominarse como "fluido espesante por cizallamiento" o "fluido dilatante", aunque el término más empleado en la documentación científica es "fluido shear thickening" o directamente sus siglas en inglés STF. • Eje longitudinal: En un amortiguador dotado de un cilindro por cuyo interior discurre un émbolo, el eje longitudinal coincide con el eje principal del cilindro a lo largo de la cual se desplaza el émbolo. Naturalmente, el émbolo se desplaza a lo largo de una dirección paralela al eje longitudinal en un primer sentido o en un segundo sentido opuesto al primero. • Eje transversal: Se trata de un eje contenido en un plano perpendicular al eje longitudinal descrito anteriormente. • Superficie frontal: Este término se utiliza de manera relativa para comparar la resistencia al desplazamiento de varias geometrías de émbolo, donde una superficie frontal mayor mplica una mayor área de la planta del émbolo con relación a la dirección longitudinal y una superficie frontal menor implica una menor área de la planta del émbolo con relación a la dirección longitudinal. Naturalmente, cuanto mayor la superficie frontal, mayor es la resistencia al desplazamiento del émbolo. • Superficie lateral: Este término se utiliza también de manera relativa para comparar la resistencia al desplazamiento de varias geometrías de émbolo, donde una superficie lateral mayor implica una mayor área del émbolo orientada en dirección radial y una superficie lateral menor implica una menor área del émbolo orientada en dirección radial. Naturalmente, cuanto mayor la superficie lateral, mayor es la resistencia al desplazamiento del émbolo. La presente invención está dirigida a un dispositivo amortiguador para vehículos que comprende un cilindro con un eje longitudinal lleno de un STF a lo largo del cual se desplaza longitudinalmente un émbolo. Además, una sección transversal del émbolo es menor que una sección transversal interior del cilindro para permitir el paso del STF a través de un espacio entre dicho émbolo y una pared interior del cilindro. Naturalmente, el émbolo estará conectado a un vástago longitudinal que sobresale por uno o por ambos extremos del cilindro y que se conecta al componente sobre el que se aplica la amortiguación. El efecto de amortiguación se obtiene como consecuencia de la interacción entre el émbolo y el STF que tiene lugar a causa del movimiento del STF de un extremo a otro del cilindro en respuesta a los desplazamientos del émbolo en uno u otro sentido a lo largo del eje longitudinal. La configuración descrita en el párrafo anterior responde esencialmente a las características de los dispositivos amortiguadores basados en fluidos STF conocidos de la técnica anterior. Sin embargo, a diferencia de los mismos, en el dispositivo amortiguador de la presente invención, el émbolo está configurado de tal manera que la fuerza que el STF opone al movimiento del émbolo en un primer sentido de desplazamiento es diferente de la fuerza que el STF opone al movimiento del émbolo en un segundo sentido de desplazamiento opuesto al primero. Existen diferentes posibilidades de configuración del émbolo que permiten conseguir las características mencionadas. Una opción es el uso de un émbolo que tiene una geometría no simétrica con relación a un plano transversal que pasa por su centro, por ejemplo un émbolo que tiene un extremo longitudinal con una primera forma y un extremo longitudinal opuesto con una segunda forma diferente de la primera. Un émbolo de este tipo podría tener, por jemplo, el primer extremo con una forma plana perpendicular al eje longitudinal y el segundo extremo con una forma semiesférica. Otra posibilidad sería el empleo de un émbolo cuya forma general fuese esencialmente igual en ambos extremos pero donde uno de ellos estuviese dotado de características superficiales diferentes, como por ejemplo rugosidades, muescas, orificios, o similares. En cualquiera de estos casos, el efecto de la asimetría en cuanto a forma o características superficiales es que la amortiguación obtenida cuando el émbolo se desplaza en un sentido es diferente de la obtenida cuando el émbolo se desplaza en el sentido opuesto. Esta configuración es ventajosa porque permite seleccionar de manera independiente las características de la amortiguación en uno u otro sentido de desplazamiento, dotando así de una mayor flexibilidad de funcionamiento al amortiguador de la invención. Como se ha mencionado más arriba, es posible conseguir una amortiguación de diferentes características en función del sentido de desplazamiento utilizando un émbolo con una geometría asimétrica estática, es decir, una geometría asimétrica (por ejemplo, en cuanto a forma o características superficiales) que permanece inalterable durante el uso del dispositivo. Sin embargo, de acuerdo con una realización particularmente preferida de la invención, el émbolo del dispositivo amortiguador tiene una geometría variable que alterna entre una primera geometría cuando el émbolo se desplaza en el primer sentido de desplazamiento y una segunda geometría cuando el émbolo se desplaza en el segundo sentido de desplazamiento. El cambio de geometría hace que la resistencia contra el desplazamiento del émbolo que provoca el STF sea diferente en función del sentido de desplazamiento. La resistencia puede variar como consecuencia de un cambio en la superficie frontal del émbolo, de un cambio en la superficie lateral del émbolo, o de una combinación de ambas. En efecto, la referencia a una geometría variable implica que el émbolo dispone de uno o varios elementos cuya forma cambia en función de si se está desplazando en uno u otro sentido. Para provocar este cambio de forma, es posible utilizar medios activos, es decir, medios externos no directamente relacionados con el funcionamiento básico del amortiguador y adecuadamente sincronizados para provocar el cambio en la geometría del émbolo en función de su sentido de desplazamiento. Estos medios externos podrían comprender imanes permanentes, electroimanes, elementos eléctricos, neumáticos o hidráulicos o, en general, cualquier medio capaz de modificar la geometría del émbolo de manera sincronizada con los cambios en el sentido de su desplazamiento. También se incluyen aquí medios en combinación con materiales capaces de modificar las características superficiales del émbolo e una manera suficientemente rápida, ya que las características superficiales del émbolo también tienen un efecto en la amortiguación. Esta configuración es ventajosa porque dota al dispositivo amortiguador de la invención de una flexibilidad aún mayor en cuanto a las características de la amortiguación en uno u otro sentido. Como se ha mencionado, el cambio de geometría del émbolo puede conseguirse empleando medios activos. Sin embargo, de acuerdo con otra realización preferida de la invención, el émbolo del dispositivo amortiguador está configurado para alternar entre la primera geometría y la segunda geometría únicamente a causa de la fuerza ejercida por el STF sobre dicho émbolo cuando éste se desplaza longitudinalmente a lo largo del cilindro. Se utiliza en este documento el término "pasivo" para hacer referencia a la capacidad de modificar la geometría del émbolo únicamente en respuesta a las fuerzas ejercidas por el STF durante su desplazamiento, sin necesidad de medios externos del tipo descrito más arriba. Es decir, en este caso el émbolo está configurado de tal modo que el cambio de geometría se produce únicamente a causa de las fuerzas fluidodinámicas sobre el émbolo que aparecen cuando éste se desplaza en uno u otro sentido de desplazamiento, sin ayuda externa de ningún tipo. Cuando el STF que envuelve al émbolo se desplaza en un sentido con relación al propio émbolo, las fuerzas que aparecen como consecuencia la interacción entre el STF y el émbolo provocan que alguna parte o elemento del émbolo adopte una determinada forma. Por el contrario, cuando el STF que envuelve al émbolo se desplaza en el sentido opuesto al anterior con relación al émbolo (a causa del cambio de sentido de desplazamiento del émbolo) , dichas fuerzas hacen que la mencionada parte o elemento del émbolo adopte una forma diferente a la anterior. El cambio de geometría se produce así de manera automática con el propio cambio de sentido de desplazamiento del émbolo, lo que asegura un correcto sincronismo. Esta configuración es particularmente ventajosa dada su mayor simplicidad con relación a otras opciones que requieren del empleo de medios activos externos al propio funcionamiento del amortiguador. Existen varios modos de conseguir que el émbolo modifique su geometría cuando cambia su sentido de desplazamiento. Se mencionan aquí dos posibilidades principales: el émbolo tiene partes móviles, o el émbolo tiene partes deformables. En este contexto, se entiende que una arte móvil es un elemento rígido que está diseñado para alternar entre dos posiciones claramente diferenciadas por medio de rotaciones, traslaciones o una combinación de rotaciones y traslaciones. Por el contrario, una parte deformable es aquella que está diseñada para cambiar de forma, ya sea elástica o plásticamente. A continuación, se describen con mayor detalle algunos ejemplos correspondientes a ambas configuraciones. 1. Partes móviles De acuerdo con esta realización preferida de la invención, el émbolo comprende un cuerpo y al menos una parte móvil sustancialmente rígida unida al cuerpo. La parte móvil está configurada para adoptar una primera posición cuando el émbolo se desplaza en el primer sentido de desplazamiento y una segunda posición cuando el émbolo se desplaza en el segundo sentido de desplazamiento. En efecto, en esta configuración el émbolo tiene partes móviles que se mueven de uno u otro modo a causa de la fuerza fluidodinámica que ejerce el STF cuando el émbolo se desplaza en uno u otro sentido. Cuando el émbolo se mueve en el primer sentido, las fuerzas fluidodinámicas causadas por la interacción con el STF provocan que la parte móvil adopte una posición tal que el émbolo en su conjunto tiene la primera geometría, mientras que cuando el émbolo se mueve en el segundo sentido, las fuerzas fluidodinámicas causadas por la interacción con el STF provocan que la parte móvil adopte una posición diferente de la anterior tal que el émbolo en su conjunto tiene la segunda geometría. El movimiento de las partes móviles podría potencialmente comprender cualquier combinación posible de traslación y rotación. Sin embargo, se describen a continuación dos realizaciones particularmente preferidas que corresponden a rotación pura y a traslación pura. 1.a Partes móviles por rotación De acuerdo con una realización particularmente preferida de la invención, la parte móvil está unida al cuerpo de manera rotativa. El cambio de geometría del émbolo se produce aquí a causa de una rotación pura de la parte móvil con relación al uerpo. En principio, la parte móvil puede rotar con relación al cuerpo alrededor de un eje orientado en cualquier dirección posible, aunque se mencionan de manera específica en este documento dos posibilidades: rotación alrededor del eje transversal, y rotación alrededor del eje longitudinal. I.a.i Rotación alrededor del eje transversal De acuerdo con otra realización preferida de la invención, la parte móvil es rotativa con relación al cuerpo alrededor de un eje transversal. Como se ha mencionado con anterioridad, el eje transversal está contenido en un plano perpendicular al eje longitudinal a lo largo del cual se desplaza el émbolo. Según una realización aún más preferida de la invención, la parte móvil comprende al menos una placa móvil, preferentemente plana, conectada al cuerpo a través de una articulación rotativa alrededor del eje transversal. Así, cuando el émbolo se desplaza en el primer sentido de desplazamiento, la fuerza ejercida por el STF provoca que la placa adopte la primera posición (posición en la que forma un primer ángulo con relación al eje longitudinal) , mientras que cuando el émbolo se desplaza en el segundo sentido de desplazamiento, la fuerza ejercida por el STF provoca que la placa adopte la segunda posición (una posición en la que forma un segundo ángulo con relación al eje longitudinal) . El diferente ángulo formado por la placa con relación a la dirección longitudinal según el sentido de desplazamiento hace que la resistencia ejercida por el STF en uno u otro sentido sea diferente. Los ángulos que forma la placa con relación al eje longitudinal en la primera y la segunda geometría podrían ser cualesquiera siempre que fuesen diferentes y, de ese modo, la resistencia ofrecida por el STF al paso del émbolo fuera diferente en función de su sentido de desplazamiento. Sin embargo, de acuerdo con otra realización preferida más de la invención, la placa móvil es perpendicular al eje longitudinal cuando está en la primera posición y es paralela al eje longitudinal cuando está en la segunda posición. Se trata de dos posiciones angulares extremas que provocan la mayor diferencia posible entre la amortiguación obtenida en uno u otro sentido de desplazamiento del émbolo. Cuando la placa es perpendicular al eje longitudinal, la resistencia fluidodinámica al movimiento es máxima, mientras que cuando la placa es paralela al eje longitudinal, la resistencia fluidodinámica al movimiento es mínima. Más adelante en este documento se describirá un ejemplo de émbolo dotado de partes móviles rotativas alrededor de un eje transversal. I.a.ii Rotación alrededor de un eje longitudinal Según otra realización preferida de la invención, la parte móvil del émbolo es giratoria con relación al cuerpo alrededor de un eje paralelo al eje longitudinal. Aún más preferentemente, la parte móvil comprende al menos una primera placa y una segunda placa, donde al menos una placa de entre la primera placa y la segunda placa está conectada al cuerpo a través de una articulación giratoria alrededor del eje paralelo al eje longitudinal. De ese modo, cuando el émbolo se desplaza en el primer sentido de desplazamiento, la fuerza ejercida por el STF provoca que dicha al menos una placa gire hasta una posición en la que las placas primera y segunda están separadas una de la otra, mientras que cuando el émbolo se desplaza en el segundo sentido de desplazamiento, la fuerza ejercida por el STF provoca que dicha al menos una placa gire hasta una posición en la que las placas primera y segunda están adosadas una a la otra. Para conseguir eso, al menos la placa giratoria puede tener una cierta inclinación con relación al eje longitudinal, adoptando así una forma similar a unas aspas o palas de una turbina que son forzadas a girar cuando un fluido (en este caso el STF) incide sobre ellas en dirección longitudinal. Más adelante en este documento se describirá un ejemplo de émbolo dotado de partes móviles rotativas alrededor de un eje longitudinal. 1.b Partes móviles por deslizamiento De acuerdo con otra realización preferida de la invención, la parte móvil del émbolo está unida al cuerpo de manera deslizante. El cambio de geometría del émbolo se produce en este caso a causa de una traslación pura de la parte móvil con relación l cuerpo. El deslizamiento podría producirse en cualquier dirección posible, incluyendo la dirección longitudinal, dirección transversal, o cualquier otra dirección no paralela a ninguna de las anteriores. Sin embargo, de acuerdo con otra realización preferida de la invención, la parte móvil comprende un elemento deslizante a lo largo de una dirección paralela al eje longitudinal. Más preferentemente, el cuerpo del émbolo tiene forma cilíndrica y elemento deslizante es telescópico con relación a dicho cuerpo. Así, cuando el émbolo se desplaza en el primer sentido de desplazamiento, la fuerza ejercida por el STF provoca que el elemento deslizante salga del cuerpo mientras que, cuando el émbolo se desplaza en el segundo sentido de desplazamiento, la fuerza ejercida por el STF provoca que el elemento deslizante se aloje dentro del cuerpo. Más adelante en este documento se describirá un ejemplo de émbolo dotado de partes móviles deslizantes. 2. Partes deformables De acuerdo con una realización preferida de la invención alternativa a las anteriores, el émbolo del dispositivo amortiguador comprende el cuerpo y una parte deformable unida al cuerpo. La parte deformable está configurada para adoptar una primera forma cuando el émbolo se desplaza en el primer sentido de desplazamiento y una segunda forma cuando el émbolo se desplaza en el segundo sentido de desplazamiento. No es imprescindible que la parte deformable sea elástica. De acuerdo con una realización particularmente preferida de la invención, la parte deformable comprende al menos un brazo unido al cuerpo y con un extremo libre orientado esencialmente a lo largo del eje longitudinal. De ese modo, la fuerza ejercida por el STF cuando el émbolo se desplaza en el primer sentido de desplazamiento provoca que dicho brazo se abra de manera que el extremo libre se aleja del cuerpo, mientras que la fuerza ejercida por el STF cuando el émbolo se desplaza en el segundo sentido de desplazamiento provoca que dicho brazo se cierre de manera que el extremo libre se acerca al cuerpo. Más adelante en este documento se describirá un ejemplo de émbolo dotado de partes deformables. De acuerdo con aún otra realización preferida, el émbolo comprende al menos un orificio a través del cual puede pasar el STF cuando dicho émbolo se desplaza en al menos uno de los dos sentidos de desplazamiento. El orificio puede estar ubicado en cualquier posición (por ejemplo, con bocas de salida situadas en los extremos del émbolo y/o en la superficie lateral del émbolo) , puede tener cualquier forma no necesariamente longitudinal rectilínea de sección constante (por ejemplo, presentar curvas y/o cambios de sección transversal) , y tener unas bocas de salida orientadas según cualquier orientación (por ejemplo, orientadas formando un ángulo con la dirección longitudinal) , siempre que el STF pase a su través en al menos uno de los dos sentidos de desplazamiento. En su versión más simple, el orificio puede ser un orificio longitudinal de sección transversal uniformemente circular que atraviesa el émbolo longitudinalmente de un extremo al otro. Sin embargo, son posibles opciones donde el orificio no tenga una dirección longitudinal rectilínea, sino que en su interior presente cambios de sección transversal. Por ejemplo, se podría diseñar un émbolo dotado de un orificio de eje longitudinal pero con forma cónica, de manera que la boca de salida en un extremo del émbolo tuviera una sección transversal mayor que la boca de salida en el extremo opuesto. De ese modo, la resistencia al desplazamiento ejercida por el orificio en uno y otro sentido de desplazamiento sería diferente. También son posibles opciones donde el orificio no tenga una dirección longitudinal rectilínea, sino que tenga una dirección inclinada con relación a la dirección longitudinal, o bien que tenga una dirección no rectilínea que incluya uno o más cambios de dirección internos. Así, un adecuado diseño de estos cambios de dirección podría servir para ajustar la resistencia ofrecida por el STF en uno o ambos sentidos de desplazamiento. Como también se ha comentado, no es necesario que el orificio tenga sus bocas de salida en los extremos del émbolo, sino que una o ambas podrían estar ubicadas en la superficie lateral del émbolo. Así, orientando adecuadamente la boca de salida ubicada en la superficie lateral, podría conseguirse que el fluido entrase en el orificio únicamente en uno de los dos sentidos de desplazamiento. Por ejemplo, podría idearse un émbolo con un orificio que tuviera una boca de salida ubicada en un extremo y la otra en la superficie lateral, y donde la boca de salida de la superficie lateral estuviese orientada en perpendicular a la dirección de desplazamiento del émbolo. Así, cuando este émbolo se desplazase en el sentido en que se ncuentra la boca de salida del extremo, el STF entraría en el orificio, pero cuando se desplazase en el sentido opuesto, el STF no entraría en el orificio. También sería posible dotar al orificio de una placa obturadora articulada a un borde o pared lateral del orificio de tal modo que la interacción con el STF provocase su cierre en uno de los dos sentidos de desplazamiento. De ese modo, cuando el émbolo se desplaza en un sentido de desplazamiento, el STF mantiene abierta la placa obturadora y el fluido entra en el orificio, mientras que cuando el émbolo se desplaza en el sentido de desplazamiento opuesto, el STF provoca el cierre de la placa obturadora y el fluido no entra en el orificio. El número de opciones en cuanto al orificio interior del émbolo es ingente, proporcionando así un gran número de posibilidades en lo que respecta al ajuste de la resistencia ejercida por el STF en uno u otro sentido de desplazamiento del émbolo. En definitiva, en la presente invención se han descrito dispositivos amortiguadores con diferentes configuraciones de émbolos. La particularidad que presentan los émbolos es que son asimétricos en función del sentido de desplazamiento, preferentemente gracias a una geometría variable, y más preferentemente donde el cambio de geometría se produce únicamente a causa de la interacción con el STF. Esto permite obtener amortiguadores muy flexibles en cuanto a las características de la amortiguación en uno u otro sentido de desplazamiento. BREVE DESCRIPCIÓN DE LOS DIBUJOS Las Figs. 1a y 1b muestran respectivamente una vista exterior en perspectiva y una sección longitudinal de un ejemplo de dispositivo de acuerdo con la presente invención. Las Figs. 2a y 2b muestran sendas vistas en perspectiva de un ejemplo de émbolo según la presente invención respectivamente en la primera y la segunda geometría. Las Figs. 3a y 3b muestran sendas vistas en perspectiva de otro ejemplo de émbolo según la presente invención respectivamente en la primera y la segunda geometría. Las Figs. 4a y 4b muestran sendas vistas en perspectiva de otro ejemplo más de émbolo según la presente invención respectivamente en la primera y la segunda geometría. Las Figs. 5a y 5b muestran sendas vistas en perspectiva de aún un ejemplo más de émbolo según la presente invención respectivamente en la primera y la segunda geometría. La Fig.6 muestra una gráfica de fuerza aplicada con relación a la velocidad de desplazamiento correspondiente a un ejemplo de dispositivo según la invención. La Fig. 7 muestra una gráfica de fuerza aplicada con relación a la distancia de desplazamiento correspondiente a un ejemplo de dispositivo según la invención. REALIZACIÓN PREFERENTE DE LA INVENCIÓN Se describen a continuación algunos ejemplos de dispositivos (1) amortiguadores según la presente invención haciendo referencia a las figuras adjuntas. En estos ejemplos, el sentido ascendente o hacia arriba coincide con el denominado "primer sentido de desplazamiento", mientras que el sentido descendente o hacia abajo coincide con el denominado "segundo sentido de desplazamiento". Las Figs. 1a y 1b muestran un ejemplo de dispositivo (1) amortiguador según la presente invención. El dispositivo (1) , cuyo aspecto exterior es similar al que presentan dispositivos amortiguadores de la técnica anterior, comprende un cilindro (2) por cuyo interior discurre un émbolo. El émbolo (3) está unido a un vástago (4) cuyos extremos sobresalen por ambos lados del cilindro (2) . El cilindro (2) está además lleno de un STF en el cual se encuentra inmerso el émbolo (3) . Además, a diferencia de lo que ocurre en otros dispositivos formados por el conjunto cilindro-émbolo/pistón, en este caso el émbolo (3) no toca las paredes interiores del cilindro (2) . Por tanto, como se aprecia en la Fig. 1b, el émbolo (3) no separa el cilindro (2) en dos cavidades herméticas separadas entre sí. Por el contrario, existe un espacio entre los bordes radialmente exteriores del émbolo (3) y las paredes interiores del cilindro (2) , de tal modo que cuando el émbolo (3) se desplaza a lo largo del cilindro (2) , el STF que rellena el cilindro (2) es obligado a pasar a través de dicho espacio de una cavidad a otra. La interacción entre el STF y el émbolo (3) durante este proceso es responsable del efecto de amortiguación proporcionado por el dispositivo (1) . Para utilizar este dispositivo (1) , normalmente el cilindro (2) está fijado de manera rígida al cuerpo del vehículo en cuestión, por ejemplo una motocicleta, mientras que el vástago (4) se fija al componente a amortiguar. Las vibraciones que se producen en dirección longitudinal se transmiten a través del vástago (4) hasta el émbolo (3) que, como consecuencia, tiende a esplazarse longitudinalmente a lo largo del cilindro (2) . La Fig. 1a muestra de manera explícita el eje longitudinal (EL) . Estas vibraciones son amortiguadas gracias al efecto del STF sobre el émbolo (3) que se ha descrito en el párrafo anterior. La Fig.2 muestra un ejemplo de émbolo (3) dotado de partes móviles por rotación con relación a un eje transversal (ET) . En particular, el émbolo (3) tiene aquí un cuerpo (31) esencialmente cilíndrico hueco, es decir, el émbolo (3) está dotado de un orificio interior cilíndrico de eje longitudinal. En un extremo superior del émbolo hay una parte móvil (32) formada por dos placas esencialmente semicirculares. Cada una de estas placas (32) es rotativa alrededor de un respectivo eje transversal (ET) y disponen de un tope posicionado adecuadamente para limitar la rotación en uno de los dos sentidos de giro. Así, cuando el émbolo (3) se desplaza hacia arriba, como se aprecia en la Fig. 2a, las fuerzas fluidodinámicas provocadas por el desplazamiento hacia abajo del STF con relación al émbolo (3) hacen que las dos placas (32) roten hasta llegar a su tope en que se encuentran contenidas en un plano horizontal, es decir, perpendicular al eje longitudinal (EL) . Además, las placas (32) están dimensionadas y posicionadas de tal modo que, cuando están en esta posición, cierran completamente la cavidad interior del cuerpo cilíndrico (31) . Por tanto, cuando el émbolo (3) se desplaza en el primer sentido (hacia arriba) , la superficie frontal es máxima, y en consecuencia la resistencia al desplazamiento ofrecida por el STF es máxima. Por el contrario, cuando el émbolo se desplaza hacia abajo, como se aprecia en la Fig. 2b, las fuerzas fluidodinámicas provocadas por el desplazamiento hacia arriba del STF con relación al émbolo (3) hacen que las dos placas roten de nuevo hasta situarse de manera natural en un plano paralelo al eje longitudinal (EL) . En esta posición, el STF puede pasar a través de la cavidad interior del cuerpo cilíndrico (31) sin que las placas (32) ofrezcan una resistencia sustancial. Por tanto, cuando el émbolo se desplaza en el segundo sentido (hacia abajo) , la superficie frontal es mínima, y en consecuencia la resistencia al desplazamiento ofrecida por el STF es mínima. La Fig. 3 muestra un ejemplo de émbolo (3) dotado de partes móviles por rotación alrededor de un eje paralelo al eje longitudinal (EL) . En este caso, el émbolo (3) está formado por un cuerpo (31) esencialmente cilíndrico orientado en dirección longitudinal del cual emergen radialmente cuatro placas (32a, 32b) . Cada una de estas placas (32a, 32b) tiene una forma esencialmente rectangular y están dispuestas esencialmente en paralelo al eje longitudinal (EL) aunque con una cierta inclinación en dirección tangencial. Esta inclinación provoca que, cuando el émbolo (3) se desplaza en dirección longitudinal, el STF ejerza sobre las mismas una fuerza que tiende a hacerlas rotar alrededor del eje longitudinal (EL) . Dos de las placas, en este ejemplo las placas (32b) , están rígidamente fijadas al cuerpo (31) , mientras que las tras dos placas, en este caso las placas (32a) están fijadas al cuerpo (31) de manera rotativa alrededor del eje longitudinal (EL) . Gracias a esta configuración, cuando el émbolo (3) se desplaza hacia arriba tal como se muestra en la Fig. 3a, las fuerzas fluidodinámicas provocadas por el desplazamiento hacia abajo del STF con relación al émbolo (3) tienden a hacer que las placas (32a) roten en el sentido opuesto a las agujas del reloj, de manera que rotan hasta la posición mostrada en la figura. Las placas (32b) , al ser fijas, se mantienen en la posición mostrada. Por tanto, la resistencia ofrecida por el STF en el primer sentido (hacia arriba) viene dada por la geometría del émbolo (3) mostrada en la Fig. 3a. Por el contrario, cuando el émbolo (3) se desplaza hacia abajo, las fuerzas fluidodinámicas provocadas por el desplazamiento hacia arriba del STF con relación al émbolo (3) tienden a hacer que las placas (32a) roten en el sentido de las agujas del reloj, llegando hasta la posición mostrada en la Fig. 3b. Como se puede apreciar, en la Fig. 3b ambas placas (32a) han rotado 90° con relación a la posición que se muestra en la Fig. 3a. Puesto que las placas (32b) no se desplazan por estar fijadas de manera fija, el resultado es que cada placa (32a) queda adosada a una correspondiente placa (32b) . Con esta segunda geometría, se aprecia claramente que hay una reducción tanto en la superficie frontal como en la superficie lateral del émbolo (3) . En consecuencia, la resistencia ofrecida por el STF en el segundo sentido (hacia abajo) dada por la geometría del émbolo (3) mostrada en la Fig. 3b es, por tanto, sensiblemente inferior a la ofrecida por el émbolo (3) con la geometría mostrada en la Fig. 3a. La Fig. 4 muestra un ejemplo de émbolo (3) dotado de partes móviles por deslizamiento a lo largo de una dirección paralela al eje longitudinal (EL) . El émbolo (3) comprende aquí un cuerpo (31) cilindrico hueco, es decir, el émbolo (3) está dotado de un orificio interior cilindrico de eje longitudinal. El émbolo (3) comprende también un conjunto de partes móviles (32) deslizantes que tienen también forma cilindrica hueca y que están dispuestas de manera telescópica con relación al cuerpo (31) y unas con relación a otras. En particular, hay tres elementos deslizantes de forma cilindrica configurados para alternar entre dos posiciones: una posición abierta en la que cada uno de los elementos cilíndricos está alojado en el elemento cilíndrico inmediatamente adyacente y donde todos ellos están, a su vez, alojados dentro del cuerpo (31) cilindrico; y una posición cerrada en la que cada elemento cilindrico sobresale ligeramente del elemento cilindrico inmediatamente adyacente y donde todos ellos sobresalen del cuerpo (31) cilindrico. Se trata esencialmente de una configuración telescópica convencional. Cuando el émbolo (3) se desplaza hacia arriba, las fuerzas fluidodinámicas provocadas por el desplazamiento hacia abajo del STF con relación al émbolo (3) impulsan los elementos deslizantes hacia abajo hasta hacer que adopten la posición abierta mostrada en la Fig. 4a. Por el contrario, cuando el émbolo se desplaza hacia abajo, las fuerzas luidodinámicas provocadas por el desplazamiento hacia arriba del STF con relación al émbolo (3) impulsan los elementos deslizantes hacia arriba hasta hacer que adopten la posición cerrada que se muestra en la Fig. 4b. El cambio de la geometría no provoca esencialmente ningún cambio en cuanto a la superficie frontal del émbolo (3) , pero sí en la superficie lateral del mismo: la superficie lateral es sensiblemente mayor en la primera geometría que en la segunda. Como consecuencia, la resistencia ofrecida por el STF en el segundo sentido (hacia abajo) dada por la geometría del émbolo (3) mostrada en la Fig. 3b es, por tanto, sensiblemente inferior a la ofrecida por el émbolo (3) con la geometría mostrada en la Fig. 3a. La Fig. 5 muestra un ejemplo de émbolo (3) dotado de partes deformables. El émbolo (3) comprende aquí un cuerpo (31) y un conjunto de al menos dos elementos deformables (33) . Los elementos deformables (33) tienen en este ejemplo forma de brazos que están rígidamente unidos al cuerpo (31) y que, tras emerger del mismo en dirección esencialmente radial, se curvan hacia arriba hasta adoptar en sus extremos una dirección esencialmente longitudinal. Cuando el émbolo (3) se desplaza hacia arriba, el desplazamiento relativo hacia abajo del STF fuerza que los brazos (33) se "abran" de tal modo que sus extremos se alejan del cuerpo (31) tal como se muestra en la Fig. 5a. Por el contrario, cuando el émbolo (3) se desplaza hacia abajo, el desplazamiento hacia arriba del STF hace que los brazos (33) se "cierren" hasta la geometría mostrada en la Fig. 5b. Los brazos (33) pueden opcionalmente ser elásticos, de manera que la geometría del émbolo (3) mostrada en la Fig. 5b sea la geometría en reposo y solo adopte la geometría mostrada en la Fig. 5a cuando el STF empuja los brazos hacia fuera durante el desplazamiento ascendente. En cualquiera de los casos, se aprecia que la superficie frontal del émbolo (3) cuando se desplaza hacia arriba (primer sentido) es mayor que cuando se desplaza hacia abajo (segundo sentido) . En este caso, además de la variación en la superficie frontal, también hay un cambio evidente en las características fluidodinámicas del émbolo (3) en función del sentido de desplazamiento. Como consecuencia, la resistencia ofrecida por el STF en el segundo sentido (hacia abajo) dada por la geometría del émbolo (3) mostrada en la Fig. 3b es, por tanto, sensiblemente inferior a la ofrecida por el émbolo (3) con la geometría mostrada en la Fig. 3a. Por último, se muestran en las Figs. 6 y 7 sendas gráficas que muestran la fuerza de amortiguación ejercida por el STF con relación respectivamente a la velocidad y al desplazamiento del émbolo (3) . En la Fig. 6 se aprecia cómo la fuerza en el émbolo (3) no es simétrica en el recorrido en compresión o en tracción (es decir, en el primer o en el segundo sentido de desplazamiento) , a diferencia de lo que ocurre en un dispositivo de amortiguación fijo simétrico del tipo convencional.
Publicaciones:
ES2955102 (28/11/2023) - A1 Solicitud de patente con informe sobre el estado de la técnica
Eventos:
En fecha 22/04/2022 se realizó Registro Instancia de Solicitud
En fecha 23/05/2022 se realizó 3585X_Registro Solicitud Prórroga de Plazos
En fecha 23/05/2022 se realizó Concesión Prórroga de Plazos
En fecha 23/05/2022 se realizó 1585X_Notificación Concesión Prórroga de Plazos
En fecha 27/05/2022 se realizó Publicación Concesión Prórroga de Plazos (BOPI)
En fecha 08/06/2022 se realizó 3003_Registro Doc. Subsanación Defectos en Admisión a Trámite Patente Invención
En fecha 13/06/2022 se realizó Admisión a Trámite
En fecha 13/06/2022 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 01/07/2022 se realizó Superado examen de oficio
En fecha 14/09/2022 se realizó Realizado IET
En fecha 20/09/2022 se realizó 1109P_Comunicación Traslado del IET
En fecha 28/11/2023 se realizó Publicación Solicitud
En fecha 28/11/2023 se realizó Publicación Folleto Solicitud con IET (A1)
En fecha 27/02/2024 se realizó PETEX_Petición de examen sustantivo
En fecha 14/03/2024 se realizó Validación petición y/o pago de examen sustantivo conforme
Pagos:
03/06/2022 - Pago Tasas IET
Fuente de la información
Parte de la información aquí publicada es pública puesto que ha sido obtenida de la Oficina de Propiedad Industrial de los diferentes países el 29/04/2024 y por lo tanto puede ser que la información no esté actualizada.Parte de la información aquí mostrada ha sido calculada por nuestro sistema informático y puede no ser veraz.
Privacidad
Si considera que al información aquí publicada afecta a su privacidad y desea que eliminemos la información aquí publicada envíe un email a info@patentes-y-marcas.com o rellene el formulario que encontrará aquí.Información sobre el registro de patente nacional por Dispositivo amortiguador para vehículos con el número P202230367
El registro de patente nacional por Dispositivo amortiguador para vehículos con el número P202230367 fue solicitada el 22/04/2022. Se trata de un registro en España por lo que este registro no ofrece protección en el resto de países. El registro Dispositivo amortiguador para vehículos con el número P202230367 fue solicitada por UNIVERSIDAD DE MÁLAGA mediante los servicios del agente Adolfo LINARES RUEDA. El registro [modality] por Dispositivo amortiguador para vehículos con el número P202230367 está clasificado como F16F 9/53,F16F 9/516,F16F 9/512 según la clasificación internacional de patentes.
Otras invenciones solicitadas en la clasificación internacional de patentes F16F 9/53,F16F 9/516,F16F 9/512.
Es posible conocer invenciones similares al campo de la técnica se refiere. El registro de patente nacional por Dispositivo amortiguador para vehículos con el número P202230367 está clasificado con la clasificación F16F 9/53,F16F 9/516,F16F 9/512 por lo que si se desea conocer más registros con la clasificación F16F 9/53,F16F 9/516,F16F 9/512 clicar aquí.Otras invenciones solicitadas a través del representante ADOLFO LINARES RUEDA
Es posible conocer todas las invenciones solicitadas a través del agente ADOLFO LINARES RUEDA entre las que se encuentra el registro patente nacional por Dispositivo amortiguador para vehículos con el número P202230367. Si se desean conocer más invenciones solicitadas a través del agente ADOLFO LINARES RUEDA clicar aquí.Patentes en España
Es posible conocer todas las invenciones publicadas en España entre las que se encuentra el registro patente nacional por Dispositivo amortiguador para vehículos. Nuestro portal www.patentes-y-marcas.com ofrece acceso a las publicaciones de patentes en España. Conocer las patentes registradas en un país es importante para saber las posibilidades de fabricar, vender o explotar una invención en España.Patentes registradas en la clase F
Es posible conocer todas las patentes registradas en la clase F ( MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA) entre las que se encuentra la patente Dispositivo amortiguador para vehículos con el número P202230367. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase F16
Es posible conocer todas las patentes registradas en la clase F16 (ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS M) entre las que se encuentra la patente Dispositivo amortiguador para vehículos con el número P202230367. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase F16F
Es posible conocer todas las patentes registradas en la clase F16F (RESORTES; AMORTIGUADORES; MEDIOS PARA AMORTIGUAR LAS VIBRACIONES) entre las que se encuentra la patente Dispositivo amortiguador para vehículos con el número P202230367. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.
¿Tienes alguna duda?
Escribe tu consulta y te responderemos rápida y gratuitamente.

Otras patentes similares
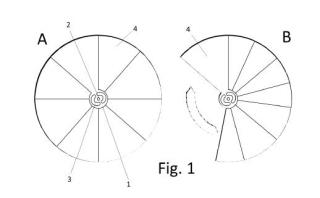
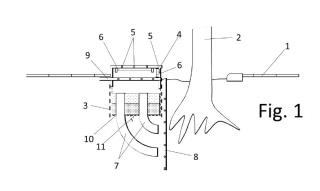
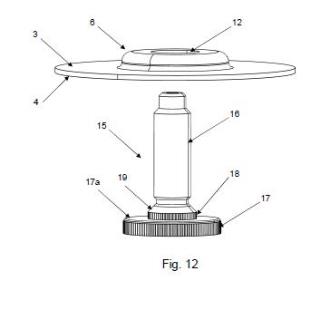
 P202230371
P202230371Profesionales Recomendados
Barcelona
933182440
España
933182440
España

Barcelona
+34 93 362 16 97
España
+34 93 362 16 97
España

Barcelona
932 593 600
España
932 593 600
España







