


- Home /
- Publicaciones de patentes /
- APARATO Y MÉTODO DE REPARACIÓN DE TUBERÍAS SUBMARINAS.
Patente nacional por "APARATO Y MÉTODO DE REPARACIÓN DE TUBERÍAS SUBMARINAS."
Este registro ha sido solicitado por
Persona física
Contacto
- Estado: Caducidad
- País:
- España
- Fecha solicitud:
- 02/03/2011
- Número solicitud:
-
P201130276
- Número publicación:
-
ES2387656
- Fecha de concesión:
-
24/07/2013
- Inventores:
-
Persona física
- Datos del titular:
-
Persona física
- Datos del representante:
-
- Clasificación Internacional de Patentes:
- F16L 55/18,F16L 55/175
- Clasificación Internacional de Patentes de la publicación:
- F16L 55/18,F16L 55/175
- Fecha de vencimiento:
Quiero registrar una patente

Reivindicaciones:
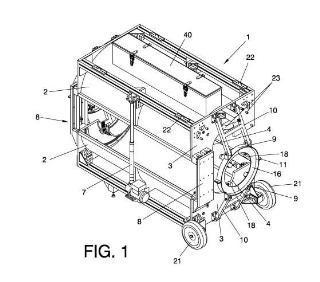
+ ES-2387656_A11. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, que al menos comprende: una carcasa (1) de configuración tubular que está dotadas de dos porciones (2) que se unen entre sí y fijan a una tubería (5) mediante bridas extremas (3) que presentan un borde interior (4) que se adapta a la configuración de dicha tubería (5) mediante una junta estanca (3a) ; siendo la carcasa (1) de contorno que envuelve a la tubería (5) , estableciendo una cámara estanca (6) entre la carcasa (1) y la tubería (5) , medios de vaciado de agua de la cámara estanca (6) ; medios de reparación de tubería previstos en la cámara estanca (6) ; caracterizado por que además comprende: al menos un elemento extensible (7) fijado a las dos porciones (2) , de separación/aproximación de dichas porciones (2) , al menos dos segmentos de collarín (9) complementarios, cada uno de ellos unido articuladamente al menos a uno de los extremos de una de las porciones (2) de la carcasa (1) , comprendiendo a su vez los segmentos de collarín (9) : • medios de unión entre segmentos de collarín, y • elementos de deslizamientos sobre la tubería (5) , donde el al menos elemento extensible (7) está configurado de manera tal que al realizarse la separación de las porciones (2) se permite su ubicación alrededor de la tubería (5) y al aproximarla se acoplan sobre la tubería formando la cámara estanca (6) , Y donde dichos segmentos de collarín (9) están configurados de manera tal que una vez dispuestas las porciones (2) de la carcasa (1) separadas alrededor de la tubería (5) , al fijar los segmentos de collarín (9) entre sí, los medios de deslizamiento apoyan sobre la tubería permitiendo el deslizamiento o guiado de la carcasa (1) sobre dicha tubería (5) hasta una zona seleccionada entre una zona a inspeccionar, una zona a limpiar y una zona a reparar. 2. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 1, caracterizado por que los elementos de deslizamiento sobre la tubería (5) comprenden rodillos (18) asistidos por un resorte (19) con precarga para presionar contra la tubería (5) y al realizar su deslizamiento sobre dicha tubería (5) , absorber las irregularidades de la superficie que pueda presentar dicha tubería (5) . 3. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 1, caracterizado por que los segmentos de collarín (9) comprenden medios de frenado de la carcasa (1) sobre la tubería (5) para impedir su deslizamiento durante una reparación. 4. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 3, caracterizado por que los medios de frenado comprenden cuñas (12) dispuestas en guías inclinadas (13) previstas en soportes (14) fij ados a la cara interna de los segmentos de collarín (9) , para realizar el guiado del desplazamiento simultáneo de las cuñas (12) en sentido axial y radial respecto de la tubería (5) ; estando los soportes (14) dotados de pivotes guía (15) en los que se dispone un segmento de aro (16) por cada segmento de collarín (9) , que están dispuestos perpendicularmente a la cara interior del segmento de collarín (9) ; unidos a las cuñas (12) y a un pistón inflable (17) y asistidos por resortes (19) ; para al inflar el pistón inflable (17) provocar el desplazamiento transversal de los segmentos de aro (16) sobre los segmentos de collarín (9) venciendo la acción de los resortes (19) ; y simultáneamente provocar el desplazamiento radial de las cuñas (12) hacia el exterior de la tubería (5) separándose la misma, y al desinflar el pistón inflable (17) producir el movimiento inverso presionando las cuñas (17) sobre la superficie de la tubería (5) . 5. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 1, caracterizado por que las dos porciones (2) están relacionadas mediante guías de desplazamiento (8) de separación/aproximación de dichas porciones (2) . 6. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 1, caracterizado por que el al menos elemento extensible (7) es un gato neumático, cuyos extremos están fijados a cada una de las porciones (2) . 7. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 1, caracterizado por que comprende sensores de detección del estado de la tubería (5) . 8. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 7, caracterizado por que los sensores de detección del estado de la tubería (5) están seleccionados entre palpadores (20) , sensores de ultrasonidos y cámaras de captación de imagen. 9. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 1, caracterizado por que los medios de reparación de la tubería comprenden: dos discos giratorios (28) dispuestos paralelos a las bridas extremas (3) y que están relacionados con una corona dentada (31) cuyo accionamiento provoca el giro de los discos giratorios alrededor de la tubería (5) , un motor que engrana con la corona dentada (31) para producir el giro de los discos giratorios (28) alrededor de la tubería (5) , un rodillo (24 ) dotado de un eje tubular que comunica con orificios (30) previstos en su superficie, que puede girar sobre su eje tubular y que está dispuesto sobre los discos giratorios (28) mediante un mecanismo de elevación/descenso para ubicar el rodillo (24) sobre la superficie de la tubería (5) presionando sobre la misma, al menos una conexión del ej e tubular del rodillo (24) con un depósito de resina, para al girar el rodillo (24) sobre la superficie de la tubería (5) , aplicarle la resina a dicha superficie de la tubería (5) a través de sus orificios (30) , cubriendo y reparando dicha superficie. 10. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 9, caracterizado por que los medios de reparación de la tubería comprenden: una caja estanca (40) dispuesta longitudinalmente en una de las porciones (2) de la carcasa (1) , que a su vez comprende: • una trampilla (41) que comunica con la cámara estanca, • guías telescópicas (42) en las que está dispuesta, • una bobina (44) de una lámina de reparación de tuberías, que comprende sendos pivotes extremos (48) , la cual se dispone con un tramo extremo de la lámina desenrollado y guiado mediante • rodillos guía (46) que mantienen el tramo desenrollado de la lámina en posición vertical, • un pistón (43) de desplazamiento de dichas guías telescópicas (42) a una posición en la que la bobina (44) se posiciona y fija en un brazo (47) previsto en cada uno de los discos giratorios (28) , y que está dotado de un alojamiento (49) de ubicación y fijación de los pivotes (48) del rodillo (24) , estando el pistón (43) , las guías telescópicas (42) y los brazos (47) configurados de manera tal que al ser actuado el pistón (43) desplaza las guías telescópicas (42) abriendo la trampilla (41) y alojándose los pivotes (48) de la bobina (44) en los aloj amientos (49) de los brazos (47) quedando el extremo desenrollado de la lámina sobre la superficie de la tubería (5) ; y estando dichos brazos (47) ubicados en correspondencia con el rodillo (24) para que al posicionar el extremo de la lámina de la bobina (44) sobre la superficie de la tubería (5) , al realizar el giro de los discos giratorios (28) se ubique el rodillo (24) sobre el extremo de la lámina presionándola contra la superficie de la tubería (5) . 11. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 1, caracterizado por que comprende medios de limpieza de la tubería (5) que incluyen un depósito de un producto abrasivo, un compresor conectado con unas boquillas previstas en las porciones (2) de la carcasa (1) , para proyectar el producto abrasivo de limpieza sobre la tubería (5) ; Y medios de aspiración de los residuos producidos en la limpieza a través de unas boquillas. 12. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 1 o 9, caracterizado por que los medios de vaciado de agua de la cámara estanca están seleccionados entre medios de inyección de aire en la cámara estanca (6) , que producen el vaciado del agua a través de válvulas anti-retorno previstas en las porciones (2) de la carcasa (1) , Y medios de aspiración del agua incluida en la cámara estanca (6) ; comprendiendo los medios de inyección de aire un compresor de aire que se aplica selectivamente sobre inyectores dispuestos en la carcasa (1) , y sobre una conducción que está conect ada al eje tubular de la bobina (44) . 13. -APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 10, caracterizado por que las porciones (2) de carcasa incluyen resistencias de calentamiento de la cámara estanca y del segmento de tubería (5) en la que está instalado, para facilitar la reacción química y solidificación de la resina aplicada y la reacción química y solidificación de la lámina de la bobina (44) sobre la tubería (5) . 14. -APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 1, caracterizado por que las porciones (2) comprenden unos pies centradores asistidos por un resorte para al aproximar las porciones (2) sobre la tubería (5) , los pies centradores apoyan sobre la tubería y realizan el centrado de dichas porciones (2) sobre dicha tubería (5) en la aproximación de las porciones (2) . 15. -APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 7, caracterizado por que comprende un elemento de disparo, mediante aire comprimido, de bolas de resina para relleno de cavidades detectadas en la superficie de la tubería. 16. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicaciones 1 a 7, caracterizado por que comprenden medios de fij ación de un cable de izado de las porciones (2) de la carcasa (1) para disponer dichas porciones (2) alrededor de una tubería vertical fuera del agua y realizar su deslizamiento sobre la tubería (5) mediante el accionamiento de cable de izado. 17. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 1, caracterizado por que comprende un sensor de profundidad. 18. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 9, caracterizado por que el mecanismo de elevación/descenso del rodillo comprende un eje giratorio (25) asistido por un resorte (26) , fij ado a los discos giratorios (28) , Y del que son solidarios sendos brazos extremos (27) en los que está fijado el eje del rodillo (24) , y además el eje giratorio (25) es solidario de una palanca (51) accionable mediante una leva (52) de posición desplazable sobre los discos giratorios (28) mediante un pistón (53) , para posicionar la leva (52) de posición desplazable en el trayecto de la palanca (51) , producir el desplazamiento angular del ej e giratorio (25) venciendo la acción de dicho resorte (26) , y producir la elevación del rodillo (24) ; que mediante un pasador (54) de enclavamiento en el eje giratorio (25) se mantiene en la posición elevada hasta que una cuña (55) dispuesta en los discos giratorios actúa sobre el pasador (54) de enclavamiento produciendo el descenso del rodillo (24) por la acción del resorte (26) hasta que contacta con la tubería. 19. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 9, caracterizado por que la al menos conexión del ej e tubular del rodillo (24) con un depósito de resina comprende: un primer y un segundo racor hembra (32) y (33) contiguos y asistidos por un resorte (34) que están fijados en uno de los discos giratorios (28) , y que mediante una conducción están conectados con el eje tubular del rodillo (24) , un primer y un segundo racor macho (35) y (36) , cada uno de ellos dispuestos en un carril semicircular (37) de posición fij a, previstos alrededor de la tubería (5) y conectados, cada uno de dichos primer y segundo racor macho (35) y (36) , con un depósito de resina; estando los racores macho (35) y (36) asistidos por un fleje que los mantiene en el extremo inicial del carril (37) , dos levas (38) previstas en correspondencia con el inicio y final de cada carril (37) y ubicadas en el trayecto de los racores hembra (32) y (33) , para producir el desplazamiento de dichos racores hembra (32) y (33) venciendo la acción del resorte (34) ; donde los racores hembra (32) y (33) , los racores macho (35) y (36) Y las levas (38) están configurados de manera tal que cuando el primer racor hembra (32) está acoplado al primer racor macho (35) , el giro de los discos giratorios (28) produce el desplazamiento angular de los racores hembra (32) y (33) arrastrando el primer racor hembra (32) al primer racor macho (35) venciendo la acción del fleje, de forma que al llegar al final del carril (37) , la leva inicial (38) del otro carril (37) eleva el segundo racor hembra (33) y produce su acoplamiento en el segundo racor macho (36) , dispuesto en el inicio de carril (37) y seguidamente el primer conector hembra (32) contacta con la leva (38) prevista al final del carril (37) , produciendo la elevación del primer racor hembra (32) venciendo la acción de su resorte (34) Y desconectándolo del primer racor macho (35) , volviendo el primer racor macho (35) a su posición inicial por la acción del fleje. 20. MÉTODO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, mediante el aparato de la reivindicación 1, caracterizado por que comprende: actuar un elemento extensible (7) que está fijado a sendas porciones (2) que forman una carcasa (1) para separarlas y ubicarlas alrededor de una tubería (5) vertical en la zona en la que está fuera del agua, unir dos segmentos de collarín (9) complementarios alrededor de la tubería (5) , donde los segmentos de collarín (9) articulan en al menos uno de los extremos de las porciones (2) , para ubicar unos medios de deslizamiento previstos en los segmentos de collarín (9) presionando sobre la superficie de la tubería, deslizar mediante un dispositivo de izado la carcasa (1) sobre la tubería (5) , detectar el estado de la tubería durante el deslizamiento, mediante sensores previstos en el aparato, parar el deslizamiento en una zona en la que se detecte un daño en la superficie de la tubería (5) , acoplar las porciones (2) sobre la superficie de la tubería (5) en la zona a reparar, formando una cámara estanca (6) , bloquear la posición de la carcasa (1) mediante la actuación de uno de los medios de frenado previstos en el aparato, vaciar el agua del interior de la cámara estanca (6) , reparar la tubería (5) . 21. MÉTODO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 2 O, caracterizado por que comprende una fase de limpieza de la tubería (5) , previa a la fase de reparación, mediante medios de limpieza previstos en el aparato, que aplican un producto abrasivo de limpieza sobre la superficie de la tubería (5) y que posteriormente succionan los residuos resultantes de la limpieza realizada. 22. MÉTODO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 20, caracterizado por que la reparación de la tubería (5) comprende aplicar una resina a un ej e tubular de un rodillo (24) , dispuesto en la cámara estanca (6) presionando sobre la superficie de la tubería (5) , Y aplicar la resina a la superficie de la tubería (5) a través de orificios (30) previstos en la superficie del rodillo (24) al realizar su giro alrededor de su eje y de la tubería (5) . 23. MÉTODO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 20, caracterizado por que la reparación de la tubería comprende las siguientes fases: introducir de forma estanca en la cámara estanca (6) una bobina (44) en la que está enrollada una lámina de reparación de tuberías, en una posición paralela a la tubería (5) , con el extremo de la lámina desenrollado un tramo para que se ubique sobre la tubería (5) , actuar un rodillo (24) dispuesto en la cámara estanca (6) para que presione sobre la superficie de la tubería (5) , efectuando su giro alrededor de su eje y de la tubería (5) para retener el extremo de la lámina de la bobina (44) entre el rodillo (24) y la tubería (5) y desenrollar la lámina de la bobina (44) alrededor de la tubería (5) mediante el desplazamiento del rodillo (24) sobre dicha tubería (5) . 24. MÉTODO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 23, caracterizado por que el enrollado de la lámina alrededor de la tubería (5) comprende una fase de inyección de resina al interior del rodillo (24) , que a través de orificios (30) previstos en dicho rodillo (24) aplica a la lámina para producir el recubrimiento de la superficie de la tubería y su posterior solidificación. . 25. MÉTODO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicaciones 21, 22 Y 23, caracterizado por que las fases de limpieza de la tubería comprenden una fase de aplicación de aire sobre la superficie de la tubería (5) , sobre la que tras la fase de reparación se realiza una fase seleccionada entre una fase de calentamiento de la cámara estanca y de segmento de tubería, y una fase de aplicación de aire, para facilitar la reacción química de la resina, lámina y acelerar su solidificación. 26. MÉTODO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 23, caracterizado por que el vaciado del agua del interior de la cámara estanca (6) se realiza mediante una fase seleccionada entre una fase de inyección de aire que desplaza el agua al exterior de la cámara a través de válvulas anti-retorno, y una fase de aspiración del agua del interior de la cámara estanca (6) .
+ ES-2387656_B11. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, que al menos comprende: una carcasa (1) de configuración tubular que está dotadas de dos porciones (2) que se unen entre sí y fijan a una tubería (5) mediante bridas extremas (3) que presentan un borde interior (4) que se adapta a la configuración de dicha tubería (5) mediante una junta estanca (3a) ; siendo la carcasa (1) de contorno que envuelve a la tubería (5) , estableciendo una cámara estanca (6) entre la carcasa (1) y la tubería (5) , medios de vaciado de agua de la cámara estanca (6) ; medios de reparación de tubería previstos en la cámara estanca (6) ; caracterizado por que además comprende: al menos un elemento extensible (7) fijado a las dos porciones (2) , de separación/aproximación de dichas porciones (2) , al menos dos segmentos de collarín (9) complementarios, cada uno de ellos unido articuladamente al menos a uno de los extremos de una de las porciones (2) de la carcasa (1) , comprendiendo a su vez los segmentos de collarín (9) : • medios de unión entre segmentos de collarín, y • elementos de deslizamientos sobre la tubería (5) , donde el al menos elemento extensible (7) está configurado de manera tal que al realizarse la separación de las porciones (2) se permite su ubicación alrededor de la tubería (5) y al aproximarla se acoplan sobre la tubería formando la cámara estanca (6) , Y donde dichos segmentos de collarín (9) están configurados de manera tal que una vez dispuestas las porciones (2) de la carcasa (1) separadas alrededor de la tubería (5) , al fijar los segmentos de collarín (9) entre sí, los medios de deslizamiento apoyan sobre la tubería permitiendo el deslizamiento o guiado de la carcasa (1) sobre dicha tubería (5) hasta una zona seleccionada entre una zona a inspeccionar, una zona a limpiar y una zona a reparar. 2. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 1, caracterizado por que los elementos de deslizamiento sobre la tubería (5) comprenden rodillos (18) asistidos por un resorte (19) con precarga para presionar contra la tubería (5) y al realizar su deslizamiento sobre dicha tubería (5) , absorber las irregularidades de la superficie que pueda presentar dicha tubería (5) . 3. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 1, caracterizado por que los segmentos de collarín (9) comprenden medios de frenado de la carcasa (1) sobre la tubería (5) para impedir su deslizamiento durante una reparación. 4. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 3, caracterizado por que los medios de frenado comprenden cuñas (12) dispuestas en guías inclinadas (13) previstas en soportes (14) fij ados a la cara interna de los segmentos de collarín (9) , para realizar el guiado del desplazamiento simultáneo de las cuñas (12) en sentido axial y radial respecto de la tubería (5) ; estando los soportes (14) dotados de pivotes guía (15) en los que se dispone un segmento de aro (16) por cada segmento de collarín (9) , que están dispuestos perpendicularmente a la cara interior del segmento de collarín (9) ; unidos a las cuñas (12) y a un pistón inflable (17) y asistidos por resortes (19) ; para al inflar el pistón inflable (17) provocar el desplazamiento transversal de los segmentos de aro (16) sobre los segmentos de collarín (9) venciendo la acción de los resortes (19) ; y simultáneamente provocar el desplazamiento radial de las cuñas (12) hacia el exterior de la tubería (5) separándose la misma, y al desinflar el pistón inflable (17) producir el movimiento inverso presionando las cuñas (17) sobre la superficie de la tubería (5) . 5. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 1, caracterizado por que las dos porciones (2) están relacionadas mediante guías de desplazamiento (8) de separación/aproximación de dichas porciones (2) . 6. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 1, caracterizado por que el al menos elemento extensible (7) es un gato neumático, cuyos extremos están fijados a cada una de las porciones (2) . 7. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 1, caracterizado por que comprende sensores de detección del estado de la tubería (5) . 8. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 7, caracterizado por que los sensores de detección del estado de la tubería (5) están seleccionados entre palpadores (20) , sensores de ultrasonidos y cámaras de captación de imagen. 9. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 1, caracterizado por que los medios de reparación de la tubería comprenden: dos discos giratorios (28) dispuestos paralelos a las bridas extremas (3) y que están relacionados con una corona dentada (31) cuyo accionamiento provoca el giro de los discos giratorios alrededor de la tubería (5) , un motor que engrana con la corona dentada (31) para producir el giro de los discos giratorios (28) alrededor de la tubería (5) , un rodillo (24 ) dotado de un eje tubular que comunica con orificios (30) previstos en su superficie, que puede girar sobre su eje tubular y que está dispuesto sobre los discos giratorios (28) mediante un mecanismo de elevación/descenso para ubicar el rodillo (24) sobre la superficie de la tubería (5) presionando sobre la misma, al menos una conexión del ej e tubular del rodillo (24) con un depósito de resina, para al girar el rodillo (24) sobre la superficie de la tubería (5) , aplicarle la resina a dicha superficie de la tubería (5) a través de sus orificios (30) , cubriendo y reparando dicha superficie. 10. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 9, caracterizado por que los medios de reparación de la tubería comprenden: una caja estanca (40) dispuesta longitudinalmente en una de las porciones (2) de la carcasa (1) , que a su vez comprende: • una trampilla (41) que comunica con la cámara estanca, • guías telescópicas (42) en las que está dispuesta, • una bobina (44) de una lámina de reparación de tuberías, que comprende sendos pivotes extremos (48) , la cual se dispone con un tramo extremo de la lámina desenrollado y guiado mediante • rodillos guía (46) que mantienen el tramo desenrollado de la lámina en posición vertical, • un pistón (43) de desplazamiento de dichas guías telescópicas (42) a una posición en la que la bobina (44) se posiciona y fija en un brazo (47) previsto en cada uno de los discos giratorios (28) , y que está dotado de un alojamiento (49) de ubicación y fijación de los pivotes (48) del rodillo (24) , estando el pistón (43) , las guías telescópicas (42) y los brazos (47) configurados de manera tal que al ser actuado el pistón (43) desplaza las guías telescópicas (42) abriendo la trampilla (41) y alojándose los pivotes (48) de la bobina (44) en los aloj amientos (49) de los brazos (47) quedando el extremo desenrollado de la lámina sobre la superficie de la tubería (5) ; y estando dichos brazos (47) ubicados en correspondencia con el rodillo (24) para que al posicionar el extremo de la lámina de la bobina (44) sobre la superficie de la tubería (5) , al realizar el giro de los discos giratorios (28) se ubique el rodillo (24) sobre el extremo de la lámina presionándola contra la superficie de la tubería (5) . 11. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 1, caracterizado por que comprende medios de limpieza de la tubería (5) que incluyen un depósito de un producto abrasivo, un compresor conectado con unas boquillas previstas en las porciones (2) de la carcasa (1) , para proyectar el producto abrasivo de limpieza sobre la tubería (5) ; Y medios de aspiración de los residuos producidos en la limpieza a través de unas boquillas. 12. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 1 o 9, caracterizado por que los medios de vaciado de agua de la cámara estanca están seleccionados entre medios de inyección de aire en la cámara estanca (6) , que producen el vaciado del agua a través de válvulas anti-retorno previstas en las porciones (2) de la carcasa (1) , Y medios de aspiración del agua incluida en la cámara estanca (6) ; comprendiendo los medios de inyección de aire un compresor de aire que se aplica selectivamente sobre inyectores dispuestos en la carcasa (1) , y sobre una conducción que está conectada al eje tubular de la bobina (44) . 13. -APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 10, caracterizado por que las porciones (2) de carcasa incluyen resistencias de calentamiento de la cámara estanca y del segmento de tubería (5) en la que está instalado, para facilitar la 15 reacción química y solidificación de la resina aplicada y la reacción química y solidificación de la lámina de la bobina (44) sobre la tubería (5) . 14 . -APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 1, caracterizado por que las porciones 20 (2) comprenden unos pies centradores asistidos por un resorte para al aproximar las porciones (2) sobre la tubería (5) , los pies centradores apoyan sobre la tubería y realizan el centrado de dichas porciones (2) sobre dicha tubería (5) en la aproximación de las porciones (2) . 25 15. -APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 7, caracterizado por que comprende un elemento de disparo, mediante aire comprimido, de bolas de resina para relleno de cavidades detectadas en la superficie de la tubería. 3 O 16. -APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicaciones 1 a 7, caracterizado por que comprenden medios de fijación de un cable de izado de las porciones (2) de la carcasa (1) para disponer dichas porciones (2) alrededor de una tubería vertical fuera del 35 agua y realizar su deslizamiento sobre la tubería (5) mediante el accionamiento de cable de izado. 17. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 1, caracterizado por que comprende un sensor de profundidad. 18. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 9, caracterizado por que el mecanismo de elevación/descenso del rodillo comprende un eje giratorio (25) asistido por un resorte (26) , fij ado a los discos giratorios (28) , Y del que son solidarios sendos brazos extremos (27) en los que está fijado el eje del rodillo (24) , y además el eje giratorio (25) es solidario de una palanca (51) accionable mediante una leva (52) de posición desplazable sobre los discos giratorios (28) mediante un pistón (53) , para posicionar la leva (52) de posición desplazable en el trayecto de la palanca (51) , producir el desplazamiento angular del ej e giratorio (25) venciendo la acción de dicho resorte (26) , y producir la elevación del rodillo (24) ; que mediante un pasador (54) de enclavamiento en el eje giratorio (25) se mantiene en la posición elevada hasta que una cuña (55) dispuesta en los discos giratorios actúa sobre el pasador (54) de enclavamiento produciendo el descenso del rodillo (24) por la acción del resorte (26) hasta que contacta con la tubería. 19. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 9, caracterizado por que la al menos conexión del ej e tubular del rodillo (24) con un depósito de resina comprende: un primer y un segundo racor hembra (32) y (33) contiguos y asistidos por un resorte (34) que están fijados en uno de los discos giratorios (28) , y que mediante una conducción están conectados con el eje tubular del rodillo (24) , un primer y un segundo racor macho (35) y (36) , cada uno de ellos dispuestos en un carril semicircular (37) de posición fij a, previstos alrededor de la tubería (5) y conectados, cada uno de dichos primer y segundo racor macho (35) y (36) , con un depósito de resina; estando los racores macho (35) y (36) asistidos por un fleje que los mantiene en el extremo inicial del carril (37) , dos levas (38) previstas en correspondencia con el inicio y final de cada carril (37) y ubicadas en el trayecto de los racores hembra (32) y (33) , para producir el desplazamiento de dichos racores hembra (32) y (33) venciendo la acción del resorte (34) ; donde los racores hembra (32) y (33) , los racores macho (35) y (36) Y las levas (38) están configurados de manera tal que cuando el primer racor hembra (32) está acoplado al primer racor macho (35) , el giro de los discos giratorios (28) produce el desplazamiento angular de los racores hembra (32) y (33) arrastrando el primer racor hembra (32) al primer racor macho (35) venciendo la acción del fleje, de forma que al llegar al final del carril (37) , la leva inicial (38) del otro carril (37) eleva el segundo racor hembra (33) y produce su acoplamiento en el segundo racor macho (36) , dispuesto en el inicio de carril (37) y seguidamente el primer conector hembra (32) contacta con la leva (38) prevista al final del carril (37) , produciendo la elevación del primer racor hembra (32) venciendo la acción de su resorte (34) Y desconectándolo del primer racor macho (35) , volviendo el primer racor macho (35) a su posición inicial por la acción del fleje. 20. MÉTODO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, mediante el aparato de la reivindicación 1, caracterizado por que comprende: actuar un elemento extensible (7) que está fijado a sendas porciones (2) que forman una carcasa (1) para separarlas y ubicarlas alrededor de una tubería (5) vertical en la zona en la que está fuera del agua, unir dos segmentos de collarín (9) complementarios alrededor de la tubería (5) , donde los segmentos de collarín (9) articulan en al menos uno de los extremos de las porciones (2) , para ubicar unos medios de deslizamiento previstos en los segmentos de collarín (9) presionando sobre la superficie de la tubería, deslizar mediante un dispositivo de izado la carcasa (1) sobre la tubería (5) , detectar el estado de la tubería durante el deslizamiento, mediante sensores previstos en el aparato, parar el deslizamiento en una zona en la que se detecte un daño en la superficie de la tubería (5) , acoplar las porciones (2) sobre la superficie de la tubería (5) en la zona a reparar, formando una cámara estanca (6) , bloquear la posición de la carcasa (1) mediante la actuación de uno de los medios de frenado previstos en el aparato, vaciar el agua del interior de la cámara estanca (6) , reparar la tubería (5) . 21. MÉTODO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 2 O, caracterizado por que comprende una fase de limpieza de la tubería (5) , previa a la fase de reparación, mediante medios de limpieza previstos en el aparato, que aplican un producto abrasivo de limpieza sobre la superficie de la tubería (5) y que posteriormente succionan los residuos resultantes de la limpieza realizada. 22. MÉTODO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 20, caracterizado por que la reparación de la tubería (5) comprende aplicar una resina a un ej e tubular de un rodillo (24) , dispuesto en la cámara estanca (6) presionando sobre la superficie de la tubería (5) , Y aplicar la resina a la superficie de la tubería (5) a través de orificios (30) previstos en la superficie del rodillo (24) al realizar su giro alrededor de su eje y de la tubería (5) . 23. MÉTODO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 20, caracterizado por que la reparación de la tubería comprende las siguientes fases: introducir de forma estanca en la cámara estanca (6) una bobina (44) en la que está enrollada una lámina de reparación de tuberías, en una posición paralela a la tubería (5) , con el extremo de la lámina desenrollado un tramo para que se ubique sobre la tubería (5) , actuar un rodillo (24) dispuesto en la cámara estanca (6) para que presione sobre la superficie de la tubería (5) , efectuando su giro alrededor de su eje y de la tubería (5) para retener el extremo de la lámina de la bobina (44) entre el rodillo (24) y la tubería (5) y desenrollar la lámina de la bobina (44) alrededor de la tubería (5) mediante el desplazamiento del rodillo (24) sobre dicha tubería (5) . 24. MÉTODO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 23, caracterizado por que el enrollado de la lámina alrededor de la tubería (5) comprende una fase de inyección de resina al interior del rodillo (24) , que a través de orificios (30) previstos en dicho rodillo (24) aplica a la lámina para producir el recubrimiento de la superficie de la tubería y su posterior solidificación. . 25. MÉTODO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicaciones 21, 22 Y 23, caracterizado por que las fases de limpieza de la tubería comprenden una fase de aplicación de aire sobre la superficie de la tubería (5) , sobre la que tras la fase de reparación se realiza una fase seleccionada entre una fase de calentamiento de la cámara estanca y de segmento de tubería, y una fase de aplicación de aire, para facilitar la reacción química de la resina, lámina y acelerar su solidificación. 26. MÉTODO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 23, caracterizado por que el vaciado del agua del interior de la cámara estanca (6) se realiza mediante una fase seleccionada entre una fase de inyección de aire que desplaza el agua al exterior de la cámara a través de válvulas anti-retorno, y una fase de aspiración del agua del interior de la cámara estanca (6) . /221 FIG. 1 - FIG.2 FIG.3 FIG.4 \.O • C) U FIG.6 /' / / / { \ \ o o \ 50 / \ \ ____ ./'" 44 FlG.7 22 29 6 28 35 2 FIG.8 29 .~ \ \ \. 53 FIG.9 FIG. 10 FIG. 11 UEtf -:1ffi~ 57 FIG. 12 FIG. 13 FIG. 14 ce C"') en C"') C"') ce C"') C\J c.o C"') LO , ..... • -
Los productos y servicios protegidos por este registro son:
F16L 55/18 - F16L 55/175
Descripciones:
+ ES-2387656_A1 APARATO Y MÉTODO DE REPARACIÓN DE TUBERÍAS SUBMARINAS OBJETO DE LA INVENCIÓN La presente invención, tal y como se expresa en el enunciado de esta memoria descriptiva, se refiere a un 5 aparato y a un método que permiten efectuar la reparación de tuberías submarinas, como por ejemplo puede ser reparar fugas, zonas dañadas por corrosión, etc.; y que tiene por objeto dotar al aparato de medios de deslizamientos sobre la tubería que permiten desplazar el aparato a lo largo de la tubería hasta la zona a reparar. Es otro objeto de la invención el permitir realizar la inspección de la tubería mediante el deslizamiento del aparato sobre la misma, hasta que se detecte una zona en la que la tubería se encuentra dañada, permitiendo realizar a continuación la reparación de dicha zona dañada, de acuerdo con el aparato y método de la invención. También es objeto de la invención el permitir efectuar la reparación de la tubería, mediante la aplicación de una capa de resina sobre la misma, a modo de pintado, y/o mediante la aplicación de una lámina reparadora alrededor de la tubería. La invención permite realizar la limpieza de la tubería previamente a su reparación. Por tanto la invención permite inspeccionar, limpiar, y/o reparar la tubería. La invención es aplicable en cualquier tipo de tubería submarina, como por ejemplo pueden ser tubería horizontales, verticales o codos, de forma que en el caso de aplicarse a tuberías verticales, permite ubicar el aparato sobre la tubería una zona fuera del agua, y deslizar el aparato a lo largo de la tubería mediante un dispositivo de izado hasta detectar una zona dañada, lo que permite efectuar su posterior limpieza y/o reparación. En el caso en el que se aplique a una tubería horizontal el deslizamiento se puede efectuar de forma manual o mediante un robot o mediante cualquier otro dispositivo que permita desplazar al aparato sobre la tubería. ANTECEDENTES DE LA INVENCIÓN El antecedente más próximo a la invención lo constituye la patente española con número de solicitud 2 O O 1 O 3 11 5 O , en 1 a que se enseña el uso de una carcasa de configuración tubular que está dotada de dos porciones que se unen entre sí y fij an a una tubería mediante bridas extremas que presentan un borde interior que se adapta a la configuración de dicha tubería mediante una junta estanca, siendo la carcasa de contorno que envuelve a la tubería, de forma que se establece una cámara estanca entre la carcasa y la tubería. Además comprende medios de vaciado del agua de dicha cámara estanca, mediante la inyección de aire que evacua el agua a través de válvulas anti-retorno previstas en la carcasa, de forma que una vez vaciada de agua la cámara estanca, se realiza la reparación de la tubería mediante la aplicación de una lámina convencional, de reparación de tuberías, alrededor de la zona dañada. La lámina se adquiere enrollada en bobinas, de forma que para efectuar la reparación de la tubería el dispositivo comprende un cargador estanco de bobinas mediante el cual se introduce la bobina en la cámara estanca sobre unos discos giratorios, y todo ello de forma que el extremo de la lámina se encuentra desenrollado y se posiciona sobre la superficie de la tubería. Además comprende un rodillo que queda ubicado en correspondencia con el extremo de la lámina situada sobre la superficie de la tubería, de modo que dicha bobina también se encuentra ubicada sobre los discos giratorios, con lo que al producir su giro se produce el desplazamiento angular de la bobina y del rodillo alrededor de la tubería a reparar, envolviendo la lámina la zona dañada, realizándose de este modo su reparación. En el documento de patente citado, se requiere realizar el montaje de las porciones de carcasa en la zona dañada de forma manual por buzos, y no se permite deslizar el dispositivo sobre la tubería, para deslizarla a lo largo de la misma y efectuar su inspección, de forma que cuando se detecte una zona dañada se acoplen automáticamente las porciones de carcasa sobre la superficie de la tubería en la zona a reparar, realizándose posteriormente la reparación. La invención permite deslizar el aparato sobre la tubería, de modo que puede realizar la inspección, limpieza y/o reparación de la misma de forma automática, eliminando la necesidad del montaje manual mediante buzos. DESCRIPCIÓN DE LA INVENCIÓN Para conseguir los objetivos y resolver los inconvenientes anteriormente indicados, la invención proporciona un nuevo aparato y método de reparación de tuberías submarinas. El aparato de la invención, al igual que el dispositivo del documento citado en el estado de la técnica, comprende una carcasa de configuración tubular que está dotada de dos porciones que se unen entre sí y fijan a una tubería mediante bridas extremas que presentan un borde inferior que se adapta a la configuración de dicha tubería mediante una junta estanca, todo ello de manera que la carcasa presenta un contorno que envuelve a la tubería, estableciendo una cámara estanca entre la carcasa y la tubería, de forma que dicha cámara estanca se vacía del agua que en ella queda alojada tras montar la carcasa sobre la tubería. Este vaciado se realiza mediante medios de vaciado de agua, lo que permite realizar la reparación posterior de la tubería de acuerdo con los medios que el aparato de invención prevé, y que serán descritos con posterioridad. La principal novedad de la invención reside en que además de los elementos anteriormente descritos, comprende al menos un elemento extensible fijado a las dos porciones de la carcasa, de modo que dicho elemento extensible permite efectuar la separación/aproximación de las dos porciones. Además el aparato comprende al menos dos segmentos de collarín complementarios, cada uno de ellos unido articuladamente a al menos uno de los extremos de una de las porciones de carcasa, comprendiendo, a su vez, los 5 segmentos de collarín medios de unión entre segmentos y elementos de deslizamiento sobre la tubería. El al menos elemento extensible está configurado de manera tal que al realizarse la separación de las porciones, se permite su ubicación alrededor de la tubería 10 y al aproximarlas se acoplan sobre la tubería formando la cámara estanca. Además dichos segmentos de collarín están configurados de manera tal que una vez dispuestas las porciones de carcasa separadas alrededor de la tubería, al fij ar los segmentos de collarín entre sí, los medios de 15 deslizamiento apoyan sobre la tubería permitiendo realizar el deslizamiento guiado de la carcasa sobre dicha tubería hasta una zona a reparar. En la realización preferente de la invención los elementos de deslizamiento sobre la tubería comprenden 2 O rodillos que están asistidos por un resorte con precarga para presionar contra la tubería. Esta configuración permite que al realizar el deslizamiento del aparato sobre la tubería, los resortes absorban las irregularidades que dicha tubería pueda presentar. 25 Además en la realización preferente de la invención se prevé que los segmentos de collarín estén dotados de medios de frenado de la carcasa sobre la tubería para impedir su desplazamiento durante una reparación, lo cual es especialmente útil cuando el aparato de la invención se 30 aplica sobre tuberías verticales, ya que en éstas una vez que se ha efectuado el vaciado del agua del interior de la cámara estanca, la carcasa tiende a flotar y por tanto, ascender a lo largo de la tubería, lo cual se impide con dichos medios de frenado, los cuales comprenden cuñas que 35 están dispuestas sobre guías inclinadas previstas en soportes que están fijados en la cara interna de los segmentos de collarín, de forma que dichas guías permiten efectuar el desplazamiento guiado simultaneo de las cuñas en sentido axial y radial respecto de la tubería. Además los soportes están dotados de pivotes-guía en los que se dispone un segmento de aro por cada segmento de collarín, de forma que cada segmento de aro queda dispuesto perpendicularmente a la cara interior del collarín, unidos a las cuñas y a un pistón inflable, al tiempo que se encuentran asistidos por resortes, de forma que esta configuración permite que al inflar el pistón inflable se provoque el desplazamiento transversal de los segmentos de aro sobre los segmentos de collarín venciendo la acción del resorte, lo que provoca simultáneamente el desplazamiento radial y longitudinal de las cuñas hacia el exterior de la tubería separándose de la misma, y de manera que al desinflar el pistón, se produce el movimiento inverso, presionando las cuñas sobre la superficie de la tubería, anclándose el aparato en la posición sobre la tubería en la que se ha efectuado el desinflado del pistón. Para facilitar la separación/aproximación de las porciones de la carcasa, se prevé que las dos porciones se encuentren relacionadas entre sí mediante guías del desplazamiento de separación/aproximación de dichas porciones. Dicho elemento extensible, está constituido por un gato neumático, cuyos extremos están fijados a cada una de las porciones, de forma que la extensión del gato neumático produce la separación entre las porciones de la carcasa, y su acortamiento, produce el acoplamiento de las dos porciones de carcasa sobre la tubería en la zona a reparar. Para permitir efectuar la inspección de la tubería, se prevé que el aparato incorpore sensores de detección de dicho estado de la tubería, como pueden ser palpadores, sensores de ultrasonidos y cámaras de captación de imagen, que pueden ubicarse en cualquier lugar del aparato de la invención, como por ejemplo, en el caso de los palpadores y sensores de ultrasonidos, estos pueden estar previstos sobre los segmentos de collarín, y para el caso de las cámaras de captación de imagen, se pueden disponer en la cara interior de las porciones de carcasa. Respecto a los medios de reparación de la tubería, en una realización de la invención, comprenden dos discos giratorios dispuestos paralelos a las bridas extremas y que están relacionados con una corona dentada cuyo giro provoca el desplazamiento angular de los discos giratorios alrededor de la tubería, para lo que se prevé un motor que engrana con la corona dentada para producir el desplazamiento angular de los discos giratorios alrededor de dicha tubería. Además los medios de reparación de tuberías están dotados de un rodillo cuyo ej e presenta una configuración tubular que comunica con orificios previstos en la superficie del rodillo, y todo ello de forma que dicho rodillo puede girar sobre su ej e y estar dispuesto sobre los discos giratorios mediante un mecanismo de elevación/descenso para permitir ubicar el rodillo sobre la superficie de la tubería presionando sobre la misma; contando con al menos una conexión del eje tubular del rodillo con un depósito de resina, de modo que al girar el rodillo sobre la superficie de la tubería mediante la actuación del motor, se aplica la resina sobre dicha superficie de la tubería a través de los orificios de la bobina, estableciendo un recubrimiento de resina que determina la reparación de la tubería. Obviamente el rodillo puede dar un número de vueltas variable en función de la reparación a realizar para proporcionar un recubrimiento de un cierto espesor que permita realizar la referida reparación. En la realización preferente de la invención el mecanismo de elevación/descenso del rodillo comprende un ej e giratorio asistido por un resorte, que está fij ado en los discos giratorios y del que son solidarios dos brazos, en cuyos extremos está fijado el eje del rodillo. Además el eje giratorio es solidario de una palanca accionable mediante una leva de posición desplazable, mediante un pistón, sobre los discos giratorios, de manera que al posicionar la leva en el trayecto de la palanca se produce el desplazamiento angular del eje giratorio, venciendo la acción del resorte, lo que determina la elevación del rodillo. Al producirse la elevación del rodillo, se produce el enclavamiento del eje giratorio en esta posición, mediante un pasador que se enclava en dicho eje giratorio que mantiene al rodillo en la posición elevada hasta que una cuña dispuesta en los discos giratorios actúa sobre el pasador de enclavamiento produciendo su desenclava miento y el descenso del rodillo por la acción del resorte, ubicándose el rodillo en la posición en la que contacta y presiona contra la tubería. La elevación del rodillo evita que se pueda pegar sobre la superficie de la tubería al secarse la resina. Respecto a la al menos conexión del ej e tubular del rodillo con un depósito de resina, ésta comprende un primer y un segundo racor hembra contiguos y asistidos por un resorte que están fijados en uno de los discos giratorios y que mediante una conducción están conectados con el ej e tubular del rodillo. Dicha conexión del ej e tubular del rodillo con un depósito de resina, también un comprende un primer y un segundo racor macho, cada uno de ellos dispuesto en un carril semicircular de posición fija en las porciones de carcasa. Estos carriles están previstos alrededor de la tubería y conectados, cada uno de ellos, con un depósito de resina. Los racores macho están asistidos por un fleje que los mantiene en el extremo inicial del carril. Además dichos medios de conexión del eje tubular del rodillo con un depósito de resina incluyen dos levas que están previstas en correspondencia con el inicio y final de cada carril y ubicadas en el trayecto de los racores hembra, para producir el desplazamiento de dichos racores hembra venciendo la acción del resorte al contactar con las levas. En base a la configuración descrita se comprende que estando el primer racor hembra acoplado al primer racor macho, el giro de los discos giratorios produce el desplazamiento de los racores hembra arrastrando el primer racor hembra al primer racor macho venciendo la acción del fleje, de forma que al llegar al final del carril, la leva inicial del otro carril eleva el segundo racor hembra y produce su acoplamiento en el segundo racor macho dispuesto en el inicio del carril, y seguidamente el primer conector hembra contacta con la leva prevista en el final del carril produciendo la elevación del primer racor hembra venciendo la acción de su resorte y desconectándolo del primer racor macho, de forma que dicho primer racor macho vuelve a su posición inicial por la acción del flej e. El proceso se repite con cada media vuelta de los discos giratorios. En otra realización de la invención los medios de reparación de la tubería comprenden una caj a estanca que está dispuesta longitudinalmente en una de las porciones de la carcasa, de forma que dicha caja estanca está dotada de una trampilla que comunica con la cámara estanca, comprendiendo además guías telescópicas en las que está dispuesta una bobina en la que está enrollada una lámina de reparación de tuberías. La bobina comprende sendos pivotes extremos, de forma que la bobina se dispone con un tramo extremo de la lámina desenrollado y guiado mediante rodillos-guía que mantienen el tramo desenrollado de la lámina en posición vertical. Además la caj a estanca está dotada de un pistón de desplazamiento de dichas guías telescópicas, para desplazarlas a una posición en la que la bobina se posiciona fija en un brazo previsto en cada uno de los dos discos giratorios, para lo que dichos brazos están dotados de un alojamiento de ubicación y fijación de los pivotes incluidos en el rodillo. En base a la descripción realizada, se comprende fácilmente que al ser actuado el pistón se desplazan las guías telescópicas abriendo la trampilla y aloj ándose los pivotes de la bobina en los alojamientos de los soportes, de forma que el extremo desenrollado de la lámina queda ubicado sobre la superficie de la tubería. Además los brazos en los que se retiene la bobina, están ubicados en correspondencia con el rodillo, de manera que al posicionar el extremo de la lámina de la bobina sobre la superficie de la tubería, y al realizar el giro de los discos giratorios, el rodillo se dispone sobre el extremo de la lámina, presionándola contra la superficie de la tubería, y permitiendo así realizar el enrollamiento de la lámina alrededor de la tubería cuando se produce el desplazamiento angular de los discos giratorios. En una realización de la invención se prevé que el aparato de la invención esté dotado de medios de limpieza de la tubería, que comprenden un depósito de un producto abrasivo, un compresor conectado con unas boquillas previstas en las porciones de carcasa, de forma que al activarse el compresor se proyecta el producto abrasivo de limpieza sobre la tubería, realizándose de esta forma la limpieza de la tubería en la zona a reparar; limpieza que se complementa mediante la incorporación de medios de aspiración de los residuos producidos en la limpieza a través de unas boquillas previstas en las porciones de carcasa. Respecto a los medios de vaciado del agua de la cámara estanca, que fueron comentados anteriormente, en una realización de la invención se prevé que éstos estén constituidos por medios de inyección de aire en la cámara estanca que producen el vaciado del agua a través de válvulas anti-retorno previstas en las porciones de carcasa. Los medios de inyección de aire comprenden un compresor de aire que se aplica selectivamente sobre inyectores dispuestos en la carcasa, o sobre una conducción que está conectada al ej e tubular de la bobina, de forma que el aire se aplica al interior de la cámara estanca a través de los orificios previstos en dicha bobina, que fueron descritos anteriormente. Cabe comentar que las boquillas y compresores, pueden ser compartidos, tanto por los medios de vaciado del agua de la cámara estanca, como por los medios de limpieza o los medios de aspiración. En una realización de la invención la carcasa incluye resistencias de calentamiento de la cámara estanca y del segmento de tubería en la que está instalado el aparato, para facilitar la reacción química y solidificación de la resina aplicada, en el caso en el que únicamente la reparación se realiza mediante resina, y también permite facilitar la reacción química y solidificación de la lámina de la bobina sobre la tubería, cuando en la reparación se utiliza una lámina, tal y como ya fue descrito. Para facilitar el acoplamiento de las porciones de carcasa sobre la tubería, se prevé que dichas porciones de carcasa comprendan unos pies centradores asistidos por un resorte, para al aproximar las porciones sobre la tubería, los pies centradores apoyan sobre la tubería y realizan el centrado sobre ésta de dichas porciones. Para el caso en el que las tuberías presenten daños de considerable espesor, se prevé que el aparato de la invención comprenda un elemento de disparo, mediante aire comprimido, de bolas de un compuesto químico para el relleno de las cavidades detectadas en la superficie de la tubería, de forma que a continuación se permita efectuar la reparación de la misma tal y como ya fue descrito. Según fue comentado con anterioridad, la invención es aplicable tanto en tuberías submarinas horizontales como verticales, resultando su aplicación más ventaj osa en las tuberías verticales, para lo que en este caso el aparato está dotado de medios de fij ación de un cable de izado de las porciones de carcasa, para disponerlas alrededor de una tubería vertical fuera o dentro del agua, de manera que una fij ados los segmentos de collarín, se permite actuando los medios de izado, y descender por deslizamiento las porciones de carcasa a lo largo de la tubería, e inspeccionar la misma, hasta detectar una zona dañada, realizándose la reparación tal y como ya fue comentado. El aparato de la invención también comprende un sensor de profundidad, para establecer la profundidad a la que se encuentran las diferentes zonas dañadas en la tubería. Además la invención se refiere a un método de reparación de tuberías, mediante el aparato descrito, que comprende una fase en la que se actúa el elemento extensible que está fij ado a las porciones que forman la carcasa del aparato, para separarlas y permitir ubicarlas alrededor de una tubería vertical en la zona en la que está fuera del agua, lo que a continuación permite unir los segmentos de collarín complementarios alrededor de la tubería, en donde los segmentos de collarín articulan en al menos uno de los extremos de las porciones, para ubicar los medios de deslizamiento previstos en los segmentos de collarín presionando sobre la tubería, lo que permite realizar deslizar a lo largo de la tubería el aparato actuando el dispositivo de izado, y detectar el estado de la tubería mediante los sensores previstos en dicho aparato, de forma que una vez que se detecte una zona dañada, se detiene el deslizamiento del aparato sobre la tubería, y se acoplan las porciones sobre la superficie de tubería en la zona a reparar, mediante la actuación del elemento extensible, formando la cámara estanca, de forma que a continuación se bloquea la posición de la carcasa mediante la actuación de los medios de frenado, y se vacía el agua del interior de la cámara estanca, para a continuación efectuarse la limpieza de la tubería, si así fuera necesario y su posterior reparación. En una realización de la invención la reparación de la tubería comprende aplicar una resina a un eje tubular de un rodillo, dispuesto en la cámara estanca presionando sobre la superficie de la tubería, y aplicar la resina a la superficie de la tubería a través de orificios previstos en la superficie del rodillo al realizar su giro alrededor de su eje y de la tubería. En otra realización de la invención la reparación se realiza mediante la introducción, de forma estanca en la cámara estanca, de una bobina en una posición paralela a la tubería, con el extremo de la lámina desenrollado un tramo que determina que la lámina se ubique sobre la tubería, de forma que a continuación se actúa el rodillo para que quede ubicado sobre la superficie de la tubería presionando contra la misma, y a continuación al efectuarse el giro de los discos giratorios, y por tanto del rodillo alrededor de la tubería y de su ej e, presiona sobre el extremo de la lámina de la bobina sobre la tubería, produciendo el desenrollado de la lámina de la bobina alrededor de la tubería mediante el desplazamiento del rodillo sobre dicha tubería. Adicionalmente al enrollado de la lámina alrededor de la tubería, se prevé una fase de inyección de resina al interior del rodillo, el cual a través de los orificios aplica la resina a la lámina para producir el recubrimiento de la superficie de la tubería y su posterior solidificación. Se prevé la realización de una fase de limpieza de la tubería previa a la reparación para el caso en el que dicha reparación lo requiera. Tras la fase de limpieza de la tubería se puede realizar una fase de aplicación de aire sobre la superficie de la tubería para conseguir una limpieza más completa de la tubería. Además tras la reparación de la tubería se calienta la cámara estanca y el segmento de tubería o se aplica aire frío o caliente, para facilitar la reacción química de la resina, la lámina y acelerar su solidificación. Una vez que se ha realizado la reparación de una zona dañada, se efectúa la separación de las porciones de carcasa, para permitir seguir inspeccionando la tubería, y repetir el proceso en una nueva zona dañada. Por tanto, mediante el aparato y método de la invención se permite realizar la inspección, limpieza y reparación de una tubería de forma automatizada y sin necesidad del empleo de buzos para el caso de las tuberías verticales. A continuación para facilitar una mejor comprensión de esta memoria descriptiva, y formando parte integrante de la misma, se acompañan una serie de figuras en las que con carácter ilustrativo y no limitativo se ha representado el objeto de la invención BREVE ENUNCIADO DE LAS FIGURAS Figura 1. Muestra una vista en perspectiva de la carcasa de la invención en la posición en la que las dos porciones que constituyen la carcasa se encuentran separadas para permitir su disposición alrede dor de una tubería. Figura 2. Muestra una vista en perspectiva del aparato de la figura anterior acoplado sobre una tubería para realizar su reparación. Las figuras 3 y 4. -Muestran un segmento de collarín en el que se incluyen los medios de deslizamiento del aparato sobre la tubería, los medios de frenado del aparato sobre la tubería en la posición de reparación, y los palpadores de detección del estado de la tubería. Figura 5. Muestra un detalle del interior de la caja estanca en el que se dispone un rodillo de una cinta de reparación de las tuberías, que mediante un pistón se introduce en el interior de la cámara estanca. Figura 6. Muestra un detalle de la disposición de la bobina en el interior de la cámara estanca sobre unos brazos previstos en los discos giratorios, cuyo desplazamiento angular realiza el enrollado de la cinta de la bobina alrededor de la tubería. Figura 7. Muestra una vista en perspectiva del detalle de la ubicación de la bobina en el interior de la cámara estanca. Figura 8. -Muestra una vista en sección transversal del aparato de la invención. Figura 9. Muestra una vista en perspectiva del detalle del mecanismo de elevación/descenso del rodillo que tiene una doble función: ubicarse sobre la superficie de la tubería discurriendo alrededor de la misma e impregnándola en una resina, y simultánea o adicionalmente, presionar sobre la lámina de la bobina para realizar el enrollamiento de la misma sobre la tubería. Las figuras 10 a 12. Muestran el detalle del funcionamiento del mecanismo de ele vación/descenso del rodillo. Figura 13. Muestra una vista esquemática de la posición elevada del rodillo. Figura 14. Muestra una vista en perspectiva del detalle del acoplamiento del ej e tubular del rodillo a un depósito de resina para la aplicación de dicha resina sobre la superficie de la tubería. Las figuras 15 y 16. Muestran el detalle del desacoplamiento/acoplamiento de los racores hembra sobre los racores macho para efectuar la conexión del eje tubular del rodillo con los depósitos de resina. DESCRIPCIÓN DE LA FORMA DE REALIZACIÓN PREFERIDA A continuación se realiza una descripción de la invención basada en las figuras anteriormente comentadas. El aparato de la invención comprende una carcasa 1 de configuración tubular que está constituida por dos porciones 2 que se unen entre sí mediante un elemento extensible 7 que permite efectuar la separación/aproximación de dichas porciones 2, y así permitir ubicar la carcasa 1 alrededor de una tubería 5. El elemento extensible es un gato neumático 7. Las porciones 2 se encuentran relacionadas entre sí mediante guías 8 que facilitan la separación/aproximación de dichas porciones 2 al actuar el gato neumático 7. Las porciones 2 se fijan a la tubería 5 mediante bridas extremas 3 que presentan un borde interior 4 que se 5 adapta a la configuración de la tubería 5 mediante una junta estanca (no representada) Sobre cada una de las bridas 3 se encuentra fijado un segmento de collarín 9 mediante un brazo articulado 10, que articula tanto en los segmentos de collarín 9, como sobre 10 las bridas extremas 3. Cada uno de los segmentos de collarín 9 está dotado de medios de unión entre dichos segmentos, que en ej emplo de realización están determinados por pletinas 11 mediante las cuales se efectúa la unión entre los dos segmentos de 15 collarín 9. Además los segmentos de collarín 9 están dotados de unos medios de frenado de la carcasa 1 sobre la tubería 5, cuya funcionalidad será descrita con posterioridad, y que están constituidos por cuñas 12 dispuestas sobre unas guías inclinadas 13 previstas en 2 O soportes 14 fij ados a la cara interna de los segmentos de collarín 9 de forma que las cuñas 12 pueden desplazarse a lo largo de las guías inclinadas 13. Además los soportes 14 son solidarios de unos pivotes guía 15 en los que se ubica un segmento de aro 16 que está unido a las cuñas 12 y a un 25 pistón inflable 17 que también está previsto en la cara interna de los segmentos de collarín 9, de forma que cuando se produce el inflado del pistón inflable 17, se produce la elevación de los segmentos de aro 16 guiados mediante los pivotes de guía, en cuyo desplazamiento arrastran a las 30 cuñas 12 deslizándose por las guías inclinadas 13, de forma que éstas se elevan y alejan de la tubería 5. En cambio al efectuarse el desinflado del pistón 17, se produce el descenso de los segmentos de aro 16 y de las cuñas 12 que presionan contra la tubería realizando el frenado de la misma cuando se proceda a efectuar su reparación. Además en la cara interior de los segmentos de collarín se prevén elementos de deslizamiento de la carcasa 1 sobre la tubería 5, elementos que están constituidos por rodillos 18 asistidos por un resorte 19 con precarga para presionar contra la tubería cuando los segmentos de collarín 9 se unen entre sí. Otro de los elementos previsto en la cara interior de los segmentos de collarín 9, lo constituyen unos palpadores 20 que permiten efectuar la inspección de la tubería. También se pueden disponer sensores de cualquier otro tipo de los conocidos convencionalmente, como por ej emplo sensores de ultrasonidos, e igualmente pueden ubicarse cámaras de visualización de la imagen de la tubería, pero en este último caso dichas cámaras de visualización se ubican en la cara interna de las porciones 2, las cuales no se han representado por resultar obvio para el experto medio en la materia. En base a la descripción realizada, se comprende fácilmente que una vez que las porciones de carcasa 2 se encuentran ubicadas, en su posición separada, alrededor de una tubería 5, se procede a realizar la unión de los segmentos de collarín 9 mediante sus pletinas 11, posición en la que los rodillos 18 presionan contra la tubería 5, tal y como fue indicado anteriormente. El ejemplo de realización de la invención se describe para la aplicación de la carcasa 1 sobre una tubería 5 vertical, de forma que en este caso la carcasa 1 se dispone alrededor de la tubería 5 vertical en la zona en la que sale del agua, por lo que la disposición de la carcasa 1 alrededor de la tubería 5 vertical, tal y como fue descrito anteriormente, se realiza de forma extremadamente sencilla sin necesidad de usar buzos. Cabe señalar que una de las porciones 2 de carcasa 1 está dotada de unas ruedas de transporte 21 que aparte de facilitar el transporte de la carcasa 1, también permiten realizar el apoyo de la misma sobre una superficie prevista en la zona en la que la tubería 5 vertical sale fuera del agua. Además las porciones 2 están dotadas de unos medios de fij ación de un cable de izado, que están determinados por enganches 22, en los que se fijan cables de un dispositivo de izado para realizar el deslizamiento de la carcasa 1 sobre la tubería 5. Así, una vez fijados los segmentos de collarín 9, y mediante el dispositivo de izado se permite descender a la carcasa 1 a lo largo de la tubería 5, de forma que mediante los palpadores 20 se inspecciona el estado de la misma, de forma que los rodillos 18 absorben las irregularidades de la tubería 5 por la acción de los resortes 19 durante el deslizamiento de la carcasa 1 sobre dicha tubería 5. De esta forma, se permite realizar la inspección de la tubería hasta que se detecta una zona que requiere su reparación, punto en el cual se posicionan las porciones 2, y a continuación se activa el gato neumático 7 realizándose la aproximación entre las porciones 2 de forma que el borde interior 4 de las bridas 3, se adapta a la configuración de la tubería 5 mediante una junta estanca 3a, definiendo la carcasa 1 un contorno que envuelve a la tubería 5 estableciendo una cámara estanca 6 entre la carcasa 1 y la tubería 5. Cabe señalar que los palpadores 20, y diferentes elementos que han de ser actuados, se encuentran conectados con un equipo de superficie que permite realizar las funciones comentadas. En el caso de que sean conexiones eléctricas, éstas pueden efectuarse de forma inalámbrica. Una posible conexión con la carcasa 1 con conducciones que discurren hasta la superficie, se representa mediante la referencia 23. Una vez formada la cámara estanca 6, se desinfla el pistón inflable 17, de forma que las cuñas 12 se desplazan sobre las guías inclinadas 13 enclavándose sobre la superficie de la tubería 5, de modo que se produce la fijación de la carcasa 1 sobre la tubería 5. A continuación se procede a vaciar la cámara estanca 6, del agua que contiene en su interior, mediante medios de inyección de aire en la cámara estanca 6 que producen el vaciado del agua a través de válvulas anti-retorno (no representadas) previstas en las porciones 2 de la carcasa 1. Estos medios por ej emplo pueden ser un compresor que puede estar ubicado fuera del agua y conectado con las porciones 2 en las que se prevén unas boquillas (no representadas) que insuflan el aire al interior de la cámara estanca 6, desplazando el agua a través de las válvulas anti-retorno. El compresor también puede estar dispuesto sobre una de las porciones 2, y ser actuado desde la superficie. En este punto cabe comentar que las porciones 2 están dotadas de unos pies centradores 58 asistidos por un resorte, que al realizar la aproximación de las porciones 2, apoyan y presionan sobre la superficie de la tubería 5, de forma que se facilita el centrado de las porciones 2 al ubicarlas sobre la tubería 5. Una vez que la cámara estanca 6 se encuentra vaciada de agua, en el caso en el que la tubería deba de ser limpiada, se prevé la incorporación de medios de limpieza que comprende un depósito de un producto abrasivo, y un compresor conectado con las boquillas previstas en las porciones 2 para proyectar el producto abrasivo de limpieza sobre la tubería y a continuación se activan unos medios de aspiración que succiona todos los residuos producidos en la limpieza, a través de unas boquillas. Los medios de aspiración, también pueden ser empleados como medios de vaciado del agua incluida en la cámara estanca 6. Una vez que la tubería se encuentra lista para ser reparada, la invención prevé que su reparación pueda ser efectuada mediante un rodillo 24, ubicado en el interior de 5 la cámara estanca 6, que mediante unos brazos 27 está fij ado sobre un ej e giratorio 25 asistido por un resorte 26, de forma que los extremos del eje giratorio 25 están fijados sobre dos discos giratorios 28 dispuestas paralelos a las bridas extremas 3, cuyo desplazamiento angular es 10 guiado mediante rodamientos 29 fijados en las bridas extremas 3. Para producir el desplazamiento angular de los discos giratorios 28, se prevé que éstos estén dotados de una corona dentada 31 que engrana con un motor que produce el desplazamiento angular de dichos discos giratorios 28. 15 Por la acción del resorte 26, se mantiene al rodillo 24 presionando sobre la superficie de la tubería 5, de forma que al accionar el motor el rodillo 24 gira alrededor de su eje y alrededor de la tubería 5. El eje del rodillo 24 presenta una configuración 2 O tubular y está conectado con depósitos de resina, y con unos orificios 30 practicados en la superficie del rodillo 24, de forma que al producirse el desplazamiento del rodillo 24 sobre la tubería 30, ésta se impregna de resina proporcionándole una capa de recubrimiento, a modo de 25 pintura, que puede determinar la reparación de dicha tubería, cuando los daños sufridos en la tubería no son elevados. El número de vueltas que el rodillo 24 da alrededor de la tubería 5, varía en función de las necesidades de la reparación a efectuar en la tubería 5. 30 El depósito de resina puede encontrarse en la superficie, o sobre la carcasa 1, de forma que en cualquiera de los casos se encuentra en una posición fija, por lo que para permitir que se produzca el giro del rodillo 24 sobre su ej e y alrededor de la tubería 30, se prevén medios de conexión del ej e tubular del rodillo 24 con los depósitos de resina, para lo que dicha conexión comprende un primer racor hembra 32 y un segundo racor hembra 33 que se encuentran fijados a los discos giratorios 28, de forma que dichos racores 32 y 33 giran junto con los discos giratorios 28, y además están conectados con el eje tubular del rodillo 24. En correspondencia con el primer racor hembra 32 se ha previsto un primer racor macho 35, y en correspondencia con el segundo racor hembra 33 se ha previsto un segundo racor macho 36. El primer y segundo racor macho 35 y 36 están dispuestos sobre un carril semicircular 37 de posición fija y previsto alrededor de la tubería 5, de forma que cada uno de dichos primer y segundo racor macho 35 y 36 están conectados con un depósito de resina mediante una conducción 39, Y a su vez están asistidos por un fleje que los mantiene en el extremo inicial del carril semicircular 37. Además, en el trayecto que realizan el primer y segundo racor hembra 32 y 33, se prevén unas levas 38, de forma que están previstas en correspondencia con el inicio y final de cada carril 37, para producir el desplazamiento de dichos racores hembra 36 y 37 venciendo la acción del resorte 34. En base a la descripción realizada, se comprende fácilmente que cuando el primer racor hembra 32 está acoplado al primer racor macho 35, el giro de los discos giratorios 28 produce el desplazamiento de los racores hembra 32 y 33, de forma que el primer racor hembra 32 arrastra al primer racor macho 35 sobre el carril 37 venciendo la acción del fleje, con lo que cuando llega al final del carril 37 la leva 38 que está dispuesta en la parte inicial del siguiente carril 37, produce la elevación del segundo racor hembra 33 venciendo la acción de su resorte 34, de forma que al dej ar de actuar la leva 38 sobre el segundo racor hembra 33, el resorte 34 produce su descenso, acoplándose sobre el segundo racor macho 36, que mediante la conducción 39 se encuentra unido a un depósito 5 de resina, de forma que la resina circula a través del segundo racor macho 36, del segundo racor hembra 34, hasta que llega hasta el eje tubular del rodillo 24. A continuación el primer racor hembra 32 contacta con la leva 38 situada al inicio del siguiente carril 37, produciendo 10 su elevación y su desconexión respecto del primer racor macho 35, de forma que así se permite mantener siempre la alimentación de la resina al interior del ej e tubular del rodillo 24. En los siguientes 180 0 de desplazamiento angular de los discos giratorios 28, es nuevamente el 15 primer racor macho 35 el que se acopla sobre el primer racor hembra 32 y a continuación se desconecta el segundo racor hembra 33 del segundo racor macho 36, repitiéndose el proceso por cada una de las vueltas que deba de dar el rodillo 24. 2 O En este punto cabe señalar, que el vaciado del agua del interior de la cámara estanca 6, también puede realizarse inyectando aire al ej e del rodillo 24 a través del mecanismo descrito para la inyección de resina al ej e tubular del rodillo 24, pero con la diferencia de que en 25 este caso en lugar de resina se aplica aire comprimido. En el caso en el que el daño sufrido por la tubería no pueda ser reparado mediante la aplicación de una capa de resina, la invención prevé otros medios de reparación que comprenden una caj a estanca 40 que comunica con la cámara 30 estanca 6 mediante una trampilla 41, y de forma que en el interior de la caja estanca 40 se han previsto unas guías telescópicas 42 asistidas por un pistón 43, para ubicar en el extremo inferior de las guías telescópicas 42 una bobina 44, que en el ejemplo de realización de la invención la bobina 44 está dispuesta sobre una soporte 45 que se ubica sobre las guías telescópicas 42. La bobina 44 tiene enrollada una lámina de reparación de tuberías de tipo convencional, de forma que dicha bobina 44 se dispone sobre las guías telescópicas 42 con un tramo de su extremo desenrollado y guiado sobre unos rodillos-guía 46, de modo que el tramo desenrollado se mantiene en posición vertical. Para permitir realizar la reparación mediante la lámina de la bobina 44, ha de realizarse el enrollado de la misma alrededor de la tubería 5, para lo que en el interior de la cámara estanca 6 se prevén sendos brazos 47 cada uno de ellos fij ados sobre los discos giratorios 28, de forma que al actuarse el pistón 43, se produce el desplazamiento de las guías telescópicas 42 que realizan la apertura de la trampilla 41, con lo que la bobina 44 desciende al interior de la cámara estanca 6, hasta que unos pivotes extremos 48 previstos sobre el soporte 45 de la bobina, se introducen en un alojamiento 49 previsto en el extremo de los brazos 47, que mediante un prisionero de bola 50 se produce la entrada de la bola en una muesca practicada en los pivotes extremos 48, fijándose de esta forma la bobina 44 sobre los brazos 47, y todo de forma que el extremo de la lámina del rodillo quede ubicada sobre la superficie de la tubería 5. Además el rodillo 24 se encuentra ubicado en una posición en la que al efectuarse el desplazamiento de los discos giratorios 28, y por tanto el desplazamiento del rodillo 24 y bobina 44, dicho rodillo 24 presiona sobre el extremo de la lámina, realizando su desenrollado, y simultáneamente su enrollado alrededor de la tubería 5. En este caso a la vez que se realiza el enrollado de la lámina alrededor de la tubería 5, también se puede aplicar resina a través de los orificios 30 del rodillo 24 para conseguir un mayor efecto reparador de la tubería 5. Una vez aplicada la resina, bien independientemente o junto con la lámina, según las dos realizaciones descritas, se prevé que el rodillo 24 esté dotado de un mecanismo de elevación/descenso que se complementa con la incorporación de una palanca 51 solidaria del eje giratorio 25 sobre el que se soporta el rodillo 24 mediante los brazos 27 ya descritos, de modo que en el trayecto que realiza la palanca 51, se ha previsto una leva de posición desplazable 52, cuya posición es regulable mediante un pistón 53, de forma que cuando dicha leva desplazable 52 se posiciona en correspondencia con la palanca 51, al contactar con la leva desplazable 52, se produce el desplazamiento angular del eje giratorio 25 venciendo la acción del resorte 26, lo que produce la elevación del rodillo 24, de forma que mediante un pasador 54 se produce el enclavamiento del eje giratorio 25 en la posición en la que el rodillo 24 se encuentra elevado, tal y como se demuestra esquemáticamente en la figura 12. De esta forma, se evita que el rodillo pueda pegarse sobre la superficie de la tubería, una vez que se ha aplicado la resina y se produzca el secado de la misma. Para realizar nuevamente el descenso del rodillo 24 en su posición sobre la tubería 5, se prevé la incorporación de una cuña 55 dispuesta en el trayecto de un elemento desplazable 56 que es solidario del pasador 54, de forma que cuando la cuña 55 contacta con el elemento desplazable 56, venciendo la acción de un resorte 57, que lo asiste, produce el desplazamiento del pasado 54 y el desenclavamiento del eje giratorio 25, que por la acción del resorte 26, desciende hasta presionar con la superficie de la tubería 5, para realizarse una nueva reparación. Para favorecer la reacción química de la resina, y acelerar su secado, se prevé la incorporación de medios de secado que están constituidos por una resistencia de calentamiento de la cámara estanca 6 y del segmento de tubería en el que está instalada la carcasa, para facilitar la reacción química y solidificación de la resina aplicada. Cabe señalar que en el caso en el que la reparación de una tubería requiera el relleno de cavidades detectadas en su superficie, se prevé que la carcasa comprenda un elemento de disparado mediante aire comprimido de bolas de resina para relleno de dichas cavidades detectadas en la superficie de la tubería. Una vez realizada la reparación de la tubería, se procede nuevamente a separar las porciones 2 actuando el elemento extensible 7, permitiéndose continuar el deslizamiento de la carcasa sobre la tubería 5, hasta encontrar una nueva zona dañada, procediéndose a realizar su reparación de la forma ya comentada. Seguidamente se enumeran las diferentes referencias utilizadas en los ej emplos de realización, para facilitar el seguimiento de su explicación: 1. Carcasa 2. Porciones (de carcasa) 3. Bridas extremas 3a. Junta estanca 4. Borde inferior (de bridas extremas) 5. Tubería 6. Cámara estanca 7. Elemento extensible 8. Guías 9. Segmentos de collarín 10. Brazo articulado 11. Pletinas 12. Cuña 13. Guía inclinada 14. Soporte 15. Pivotes guía 16. Segmentos de aro 17. Pistón inflable 18. Rodillos 19. Resorte 20. Palpadores 21. Ruedas de transporte 22. Enganches 23. Conexiones con superficie 24. Rodillo 25. Eje giratorio 26. Resorte 27. Brazos 28. Discos giratorios 29. Rodamientos 30. Orificios 31. Corona dentada 32. Primer racor hembra 33. Segundo racor hembra 34. Resorte 35. Primer racor macho 36. Segundo racor macho 37. Carril 38. Levas 39. Conexión de 35 y 36 con depósito resina 40. Caja estanca 41. Trampilla 42. Guías telescópicas 43. Pistón 44. Bobina 45. Soporte de bobina 46. Rodillos-guía 47. Brazos 48. Pivotes extremos 49. Alojamiento 50. Prisionero de bola . Palanca 52. Leva de posición desplazable 53. Pistón 54. Pasador 55. Cuña 56. Elemento desplazable 57. Resorte 58. Pies de centrado Una vez formada la cámara estanca 6, se desinfla el pistón inflable 17, de forma que las cuñas 12 se desplazan sobre las guías inclinadas 13 enclavándose sobre la superficie de la tubería S, de modo que se produce la fijación de la carcasa 1 sobre la tubería S. A continuación se procede a vaciar la cámara estanca 6, del agua que contiene en su interior, mediante medios de inyección de aire en la cámara estanca 6 que producen el vaciado del agua a través de válvulas anti-retorno (no representadas) previstas en las porciones 2 de la carcasa 1. Estos medios por ejemplo pueden ser un compresor que puede estar ubicado fuera del agua y conectado con las porciones 2 en las que se prevén unas boquillas (no representadas) que insuflan el aire al interior de la cámara estanca 6, desplazando el agua a través de las válvulas anti-retorno. El compresor también puede estar dispuesto sobre una de las porciones 2, y ser actuado desde la superficie. En este punto cabe comentar que las porciones 2 están dotadas de unos pies centradores asistidos por un resorte, que al realizar la aproximación de las porciones 2, apoyan y presionan sobre la superficie de la tubería 5, de forma que se facilita el centrado de las porciones 2 al ubic~rlas sobre la tubería S. Una vez que la cámara estanca 6 se encuentra vaciada de agua, en el caso en el que la tubería deba de ser limpiada, se prevé la incorporación de medios de limpieza que comprende un depósito de un producto abrasivo, y un compresor conectado con las boquillas previstas en las porciones 2 para proyectar el producto abrasivo de limpieza sobre la tubería y a continuación se activan unos medios de aspiración que succiona todos los residuos producidos en la limpieza, a través de unas boquillas. Los medios de aspiración, también pueden ser empleados como medios de vaciado del agua incluida en la cámara 54. Pasador 55. Cuña 56. Elemento desplazable 57. Resorte
+ ES-2387656_B1 APARATO Y MÉTODO DE REPARACIÓN DE TUBERÍAS SUBMARINAS OBJETO DE LA INVENCIÓN La presente invención, tal y como se expresa en el enunciado de esta memoria descriptiva, se refiere a un aparato y a un método que permiten efectuar la reparación de tuberías submarinas, como por ejemplo puede ser reparar fugas, zonas dañadas por corrosión, etc.; y que tiene por objeto dotar al aparato de medios de deslizamientos sobre la tubería que permiten desplazar el aparato a lo largo de la tubería hasta la zona a reparar. Es otro objeto de la invención el permitir realizar la inspección de la tubería mediante el deslizamiento del aparato sobre la misma, hasta que se detecte una zona en la que la tubería se encuentra dañada, permitiendo realizar a continuación la reparación de dicha zona dañada, de acuerdo con el aparato y método de la invención. También es objeto de la invención el permitir efectuar la reparación de la tubería, mediante la aplicación de una capa de resina sobre la misma, a modo de pintado, y/o mediante la aplicación de una lámina reparadora alrededor de la tubería. La invención permite realizar la limpieza de la tubería previamente a su reparación. Por tanto la invención permite inspeccionar, limpiar, y/o reparar la tubería. La invención es aplicable en cualquier tipo de tubería submarina, como por ejemplo pueden ser tubería horizontales, verticales o codos, de forma que en el caso de aplicarse a tuberías verticales, permite ubicar el aparato sobre la tubería una zona fuera del agua, y deslizar el aparato a lo largo de la tubería mediante un dispositivo de izado hasta detectar una zona dañada, lo que permite efectuar su posterior limpieza y/o reparación. En el caso en el que se aplique a una tubería horizontal el deslizamiento se puede efectuar de forma manual o mediante un robot o mediante cualquier otro dispositivo que permita desplazar al aparato sobre la tubería. ANTECEDENTES DE LA INVENCIÓN El antecedente más próximo a la invención lo constituye la patente española con número de solicitud 2 O O 1 O 3 11 5 O , en 1 a que se enseña el uso de una carcasa de configuración tubular que está dotada de dos porciones que se unen entre sí y fij an a una tubería mediante bridas extremas que presentan un borde interior que se adapta a la configuración de dicha tubería mediante una junta estanca, siendo la carcasa de contorno que envuelve a la tubería, de forma que se establece una cámara estanca entre la carcasa y la tubería. Además comprende medios de vaciado del agua de dicha cámara estanca, mediante la inyección de aire que evacua el agua a través de válvulas anti-retorno previstas en la carcasa, de forma que una vez vaciada de agua la cámara estanca, se realiza la reparación de la tubería mediante la aplicación de una lámina convencional, de reparación de tuberías, alrededor de la zona dañada. La lámina se adquiere enrollada en bobinas, de forma que para efectuar la reparación de la tubería el dispositivo comprende un cargador estanco de bobinas mediante el cual se introduce la bobina en la cámara estanca sobre unos discos giratorios, y todo ello de forma que el extremo de la lámina se encuentra desenrollado y se posiciona sobre la superficie de la tubería. Además comprende un rodillo que queda ubicado en correspondencia con el extremo de la lámina situada sobre la superficie de la tubería, de modo que dicha bobina también se encuentra ubicada sobre los discos giratorios, con lo que al producir su giro se produce el desplazamiento angular de la bobina y del rodillo alrededor de la tubería a reparar, envolviendo la lámina la zona dañada, realizándose de este modo su reparación. En el documento de patente citado, se requiere realizar el montaje de las porciones de carcasa en la zona dañada de forma manual por buzos, y no se permite deslizar el dispositivo sobre la tubería, para deslizarla a lo largo de la misma y efectuar su inspección, de forma que cuando se detecte una zona dañada se acoplen automáticamente las porciones de carcasa sobre la superficie de la tubería en la zona a reparar, realizándose posteriormente la reparación. La invención permite deslizar el aparato sobre la tubería, de modo que puede realizar la inspección, limpieza y/o reparación de la misma de forma automática, eliminando la necesidad del montaje manual mediante buzos. DESCRIPCIÓN DE LA INVENCIÓN Para conseguir los objetivos y resolver los inconvenientes anteriormente indicados, la invención proporciona un nuevo aparato y método de reparación de tuberías submarinas. El aparato de la invención, al igual que el dispositivo del documento citado en el estado de la técnica, comprende una carcasa de configuración tubular que está dotada de dos porciones que se unen entre sí y fijan a una tubería mediante bridas extremas que presentan un borde inferior que se adapta a la configuración de dicha tubería mediante una junta estanca, todo ello de manera que la carcasa presenta un contorno que envuelve a la tubería, estableciendo una cámara estanca entre la carcasa y la tubería, de forma que dicha cámara estanca se vacía del agua que en ella queda alojada tras montar la carcasa sobre la tubería. Este vaciado se realiza mediante medios de vaciado de agua, lo que permite realizar la reparación posterior de la tubería de acuerdo con los medios que el aparato de invención prevé, y que serán descritos con posterioridad. La principal novedad de la invención reside en que además de los elementos anteriormente descritos, comprende al menos un elemento extensible fijado a las dos porciones de la carcasa, de modo que dicho elemento extensible permite efectuar la separación/aproximación de las dos porciones. Además el aparato comprende al menos dos segmentos de collarín complementarios, cada uno de ellos unido articuladamente a al menos uno de los extremos de una de las porciones de carcasa, comprendiendo, a su vez, los 5 segmentos de collarín medios de unión entre segmentos y elementos de deslizamiento sobre la tubería. El al menos elemento extensible está configurado de manera tal que al realizarse la separación de las porciones, se permite su ubicación alrededor de la tubería 10 y al aproximarlas se acoplan sobre la tubería formando la cámara estanca. Además dichos segmentos de collarín están configurados de manera tal que una vez dispuestas las porciones de carcasa separadas alrededor de la tubería, al fij ar los segmentos de collarín entre sí, los medios de 15 deslizamiento apoyan sobre la tubería permitiendo realizar el deslizamiento guiado de la carcasa sobre dicha tubería hasta una zona a reparar. En la realización preferente de la invención los elementos de deslizamiento sobre la tubería comprenden 2 O rodillos que están asistidos por un resorte con precarga para presionar contra la tubería. Esta configuración permite que al realizar el deslizamiento del aparato sobre la tubería, los resortes absorban las irregularidades que dicha tubería pueda presentar. 25 Además en la realización preferente de la invención se prevé que los segmentos de collarín estén dotados de medios de frenado de la carcasa sobre la tubería para impedir su desplazamiento durante una reparación, lo cual es especialmente útil cuando el aparato de la invención se 30 aplica sobre tuberías verticales, ya que en éstas una vez que se ha efectuado el vaciado del agua del interior de la cámara estanca, la carcasa tiende a flotar y por tanto, ascender a lo largo de la tubería, lo cual se impide con dichos medios de frenado, los cuales comprenden cuñas que 35 están dispuestas sobre guías inclinadas previstas en soportes que están fijados en la cara interna de los segmentos de collarín, de forma que dichas guías permiten efectuar el desplazamiento guiado simultaneo de las cuñas en sentido axial y radial respecto de la tubería. Además los soportes están dotados de pivotes-guía en los que se dispone un segmento de aro por cada segmento de collarín, de forma que cada segmento de aro queda dispuesto perpendicularmente a la cara interior del collarín, unidos a las cuñas y a un pistón inflable, al tiempo que se encuentran asistidos por resortes, de forma que esta configuración permite que al inflar el pistón inflable se provoque el desplazamiento transversal de los segmentos de aro sobre los segmentos de collarín venciendo la acción del resorte, lo que provoca simultáneamente el desplazamiento radial y longitudinal de las cuñas hacia el exterior de la tubería separándose de la misma, y de manera que al desinflar el pistón, se produce el movimiento inverso, presionando las cuñas sobre la superficie de la tubería, anclándose el aparato en la posición sobre la tubería en la que se ha efectuado el desinflado del pistón. Para facilitar la separación/aproximación de las porciones de la carcasa, se prevé que las dos porciones se encuentren relacionadas entre sí mediante guías del desplazamiento de separación/aproximación de dichas porciones. Dicho elemento extensible, está constituido por un gato neumático, cuyos extremos están fijados a cada una de las porciones, de forma que la extensión del gato neumático produce la separación entre las porciones de la carcasa, y su acortamiento, produce el acoplamiento de las dos porciones de carcasa sobre la tubería en la zona a reparar. Para permitir efectuar la inspección de la tubería, se prevé que el aparato incorpore sensores de detección de dicho estado de la tubería, como pueden ser palpadores, sensores de ultrasonidos y cámaras de captación de imagen, que pueden ubicarse en cualquier lugar del aparato de la invención, como por ejemplo, en el caso de los palpadores y sensores de ultrasonidos, estos pueden estar previstos sobre los segmentos de collarín, y para el caso de las cámaras de captación de imagen, se pueden disponer en la cara interior de las porciones de carcasa. Respecto a los medios de reparación de la tubería, en una realización de la invención, comprenden dos discos giratorios dispuestos paralelos a las bridas extremas y que están relacionados con una corona dentada cuyo giro provoca el desplazamiento angular de los discos giratorios alrededor de la tubería, para lo que se prevé un motor que engrana con la corona dentada para producir el desplazamiento angular de los discos giratorios alrededor de dicha tubería. Además los medios de reparación de tuberías están dotados de un rodillo cuyo ej e presenta una configuración tubular que comunica con orificios previstos en la superficie del rodillo, y todo ello de forma que dicho rodillo puede girar sobre su ej e y estar dispuesto sobre los discos giratorios mediante un mecanismo de elevación/descenso para permitir ubicar el rodillo sobre la superficie de la tubería presionando sobre la misma; contando con al menos una conexión del eje tubular del rodillo con un depósito de resina, de modo que al girar el rodillo sobre la superficie de la tubería mediante la actuación del motor, se aplica la resina sobre dicha superficie de la tubería a través de los orificios de la bobina, estableciendo un recubrimiento de resina que determina la reparación de la tubería. Obviamente el rodillo puede dar un número de vueltas variable en función de la reparación a realizar para proporcionar un recubrimiento de un cierto espesor que permita realizar la referida reparación. En la realización preferente de la invención el mecanismo de elevación/descenso del rodillo comprende un ej e giratorio asistido por un resorte, que está fij ado en los discos giratorios y del que son solidarios dos brazos, en cuyos extremos está fijado el eje del rodillo. Además el eje giratorio es solidario de una palanca accionable mediante una leva de posición desplazable, mediante un pistón, sobre los discos giratorios, de manera que al posicionar la leva en el trayecto de la palanca se produce el desplazamiento angular del eje giratorio, venciendo la acción del resorte, lo que determina la elevación del rodillo. Al producirse la elevación del rodillo, se produce el enclavamiento del eje giratorio en esta posición, mediante un pasador que se enclava en dicho eje giratorio que mantiene al rodillo en la posición elevada hasta que una cuña dispuesta en los discos giratorios actúa sobre el pasador de enclavamiento produciendo su desenclava miento y el descenso del rodillo por la acción del resorte, ubicándose el rodillo en la posición en la que contacta y presiona contra la tubería. La elevación del rodillo evita que se pueda pegar sobre la superficie de la tubería al secarse la resina. Respecto a la al menos conexión del ej e tubular del rodillo con un depósito de resina, ésta comprende un primer y un segundo racor hembra contiguos y asistidos por un resorte que están fijados en uno de los discos giratorios y que mediante una conducción están conectados con el ej e tubular del rodillo. Dicha conexión del ej e tubular del rodillo con un depósito de resina, también un comprende un primer y un segundo racor macho, cada uno de ellos dispuesto en un carril semicircular de posición fija en las porciones de carcasa. Estos carriles están previstos alrededor de la tubería y conectados, cada uno de ellos, con un depósito de resina. Los racores macho están asistidos por un fleje que los mantiene en el extremo inicial del carril. Además dichos medios de conexión del eje tubular del rodillo con un depósito de resina incluyen dos levas que están previstas en correspondencia con el inicio y final de cada carril y ubicadas en el trayecto de los racores hembra, para producir el desplazamiento de dichos racores hembra venciendo la acción del resorte al contactar con las levas. En base a la configuración descrita se comprende que estando el primer racor hembra acoplado al primer racor macho, el giro de los discos giratorios produce el desplazamiento de los racores hembra arrastrando el primer racor hembra al primer racor macho venciendo la acción del fleje, de forma que al llegar al final del carril, la leva inicial del otro carril eleva el segundo racor hembra y produce su acoplamiento en el segundo racor macho dispuesto en el inicio del carril, y seguidamente el primer conector hembra contacta con la leva prevista en el final del carril produciendo la elevación del primer racor hembra venciendo la acción de su resorte y desconectándolo del primer racor macho, de forma que dicho primer racor macho vuelve a su posición inicial por la acción del flej e. El proceso se repite con cada media vuelta de los discos giratorios. En otra realización de la invención los medios de reparación de la tubería comprenden una caj a estanca que está dispuesta longitudinalmente en una de las porciones de la carcasa, de forma que dicha caja estanca está dotada de una trampilla que comunica con la cámara estanca, comprendiendo además guías telescópicas en las que está dispuesta una bobina en la que está enrollada una lámina de reparación de tuberías. La bobina comprende sendos pivotes extremos, de forma que la bobina se dispone con un tramo extremo de la lámina desenrollado y guiado mediante rodillos-guía que mantienen el tramo desenrollado de la lámina en posición vertical. Además la caj a estanca está dotada de un pistón de desplazamiento de dichas guías telescópicas, para desplazarlas a una posición en la que la bobina se posiciona fija en un brazo previsto en cada uno de los dos discos giratorios, para lo que dichos brazos están dotados de un alojamiento de ubicación y fijación de los pivotes incluidos en el rodillo. En base a la descripción realizada, se comprende fácilmente que al ser actuado el pistón se desplazan las guías telescópicas abriendo la trampilla y aloj ándose los pivotes de la bobina en los alojamientos de los soportes, de forma que el extremo desenrollado de la lámina queda ubicado sobre la superficie de la tubería. Además los brazos en los que se retiene la bobina, están ubicados en correspondencia con el rodillo, de manera que al posicionar el extremo de la lámina de la bobina sobre la superficie de la tubería, y al realizar el giro de los discos giratorios, el rodillo se dispone sobre el extremo de la lámina, presionándola contra la superficie de la tubería, y permitiendo así realizar el enrollamiento de la lámina alrededor de la tubería cuando se produce el desplazamiento angular de los discos giratorios. En una realización de la invención se prevé que el aparato de la invención esté dotado de medios de limpieza de la tubería, que comprenden un depósito de un producto abrasivo, un compresor conectado con unas boquillas previstas en las porciones de carcasa, de forma que al activarse el compresor se proyecta el producto abrasivo de limpieza sobre la tubería, realizándose de esta forma la limpieza de la tubería en la zona a reparar; limpieza que se complementa mediante la incorporación de medios de aspiración de los residuos producidos en la limpieza a través de unas boquillas previstas en las porciones de carcasa. Respecto a los medios de vaciado del agua de la cámara estanca, que fueron comentados anteriormente, en una realización de la invención se prevé que éstos estén constituidos por medios de inyección de aire en la cámara estanca que producen el vaciado del agua a través de válvulas anti-retorno previstas en las porciones de carcasa. Los medios de inyección de aire comprenden un compresor de aire que se aplica selectivamente sobre inyectores dispuestos en la carcasa, o sobre una conducción que está conectada al ej e tubular de la bobina, de forma que el aire se aplica al interior de la cámara estanca a través de los orificios previstos en dicha bobina, que fueron descritos anteriormente. Cabe comentar que las boquillas y compresores, pueden ser compartidos, tanto por los medios de vaciado del agua de la cámara estanca, como por los medios de limpieza o los medios de aspiración. En una realización de la invención la carcasa incluye resistencias de calentamiento de la cámara estanca y del segmento de tubería en la que está instalado el aparato, para facilitar la reacción química y solidificación de la resina aplicada, en el caso en el que únicamente la reparación se realiza mediante resina, y también permite facilitar la reacción química y solidificación de la lámina de la bobina sobre la tubería, cuando en la reparación se utiliza una lámina, tal y como ya fue descrito. Para facilitar el acoplamiento de las porciones de carcasa sobre la tubería, se prevé que dichas porciones de carcasa comprendan unos pies centradores asistidos por un resorte, para al aproximar las porciones sobre la tubería, los pies centradores apoyan sobre la tubería y realizan el centrado sobre ésta de dichas porciones. Para el caso en el que las tuberías presenten daños de considerable espesor, se prevé que el aparato de la invención comprenda un elemento de disparo, mediante aire comprimido, de bolas de un compuesto químico para el relleno de las cavidades detectadas en la superficie de la tubería, de forma que a continuación se permita efectuar la reparación de la misma tal y como ya fue descrito. Según fue comentado con anterioridad, la invención es aplicable tanto en tuberías submarinas horizontales como verticales, resultando su aplicación más ventaj osa en las tuberías verticales, para lo que en este caso el aparato está dotado de medios de fij ación de un cable de izado de las porciones de carcasa, para disponerlas alrededor de una tubería vertical fuera o dentro del agua, de manera que una fij ados los segmentos de collarín, se permite actuando los medios de izado, y descender por deslizamiento las porciones de carcasa a lo largo de la tubería, e inspeccionar la misma, hasta detectar una zona dañada, realizándose la reparación tal y como ya fue comentado. El aparato de la invención también comprende un sensor de profundidad, para establecer la profundidad a la que se encuentran las diferentes zonas dañadas en la tubería. Además la invención se refiere a un método de reparación de tuberías, mediante el aparato descrito, que comprende una fase en la que se actúa el elemento extensible que está fij ado a las porciones que forman la carcasa del aparato, para separarlas y permitir ubicarlas alrededor de una tubería vertical en la zona en la que está fuera del agua, lo que a continuación permite unir los segmentos de collarín complementarios alrededor de la tubería, en donde los segmentos de collarín articulan en al menos uno de los extremos de las porciones, para ubicar los medios de deslizamiento previstos en los segmentos de collarín presionando sobre la tubería, lo que permite realizar deslizar a lo largo de la tubería el aparato actuando el dispositivo de izado, y detectar el estado de la tubería mediante los sensores previstos en dicho aparato, de forma que una vez que se detecte una zona dañada, se detiene el deslizamiento del aparato sobre la tubería, y se acoplan las porciones sobre la superficie de tubería en la zona a reparar, mediante la actuación del elemento extensible, formando la cámara estanca, de forma que a continuación se bloquea la posición de la carcasa mediante la actuación de los medios de frenado, y se vacía el agua del interior de la cámara estanca, para a continuación efectuarse la limpieza de la tubería, si así fuera necesario y su posterior reparación. En una realización de la invención la reparación de la tubería comprende aplicar una resina a un eje tubular de un rodillo, dispuesto en la cámara estanca presionando sobre la superficie de la tubería, y aplicar la resina a la superficie de la tubería a través de orificios previstos en la superficie del rodillo al realizar su giro alrededor de su eje y de la tubería. En otra realización de la invención la reparación se realiza mediante la introducción, de forma estanca en la cámara estanca, de una bobina en una posición paralela a la tubería, con el extremo de la lámina desenrollado un tramo que determina que la lámina se ubique sobre la tubería, de forma que a continuación se actúa el rodillo para que quede ubicado sobre la superficie de la tubería presionando contra la misma, y a continuación al efectuarse el giro de los discos giratorios, y por tanto del rodillo alrededor de la tubería y de su ej e, presiona sobre el extremo de la lámina de la bobina sobre la tubería, produciendo el desenrollado de la lámina de la bobina alrededor de la tubería mediante el desplazamiento del rodillo sobre dicha tubería. Adicionalmente al enrollado de la lámina alrededor de la tubería, se prevé una fase de inyección de resina al interior del rodillo, el cual a través de los orificios aplica la resina a la lámina para producir el recubrimiento de la superficie de la tubería y su posterior solidificación. Se prevé la realización de una fase de limpieza de la tubería previa a la reparación para el caso en el que dicha reparación lo requiera. Tras la fase de limpieza de la tubería se puede realizar una fase de aplicación de aire sobre la superficie de la tubería para conseguir una limpieza más completa de la tubería. Además tras la reparación de la tubería se calienta la cámara estanca y el segmento de tubería o se aplica aire frío o caliente, para facilitar la reacción química de la resina, la lámina y acelerar su solidificación. Una vez que se ha realizado la reparación de una zona dañada, se efectúa la separación de las porciones de carcasa, para permitir seguir inspeccionando la tubería, y repetir el proceso en una nueva zona dañada. Por tanto, mediante el aparato y método de la invención se permite realizar la inspección, limpieza y reparación de una tubería de forma automatizada y sin necesidad del empleo de buzos para el caso de las tuberías verticales. A continuación para facilitar una mejor comprensión de esta memoria descriptiva, y formando parte integrante de la misma, se acompañan una serie de figuras en las que con carácter ilustrativo y no limitativo se ha representado el objeto de la invención BREVE ENUNCIADO DE LAS FIGURAS Figura 1. Muestra una vista en perspectiva de la carcasa de la invención en la posición en la que las dos porciones que constituyen la carcasa se encuentran separadas para permitir su disposición alrede dor de una tubería. Figura 2. Muestra una vista en perspectiva del aparato de la figura anterior acoplado sobre una tubería para realizar su reparación. Las figuras 3 y 4. -Muestran un segmento de collarín en el que se incluyen los medios de deslizamiento del aparato sobre la tubería, los medios de frenado del aparato sobre la tubería en la posición de reparación, y los palpadores de detección del estado de la tubería. Figura 5. Muestra un detalle del interior de la caja estanca en el que se dispone un rodillo de una cinta de reparación de las tuberías, que mediante un pistón se introduce en el interior de la cámara estanca. Figura 6. Muestra un detalle de la disposición de la bobina en el interior de la cámara estanca sobre unos brazos previstos en los discos giratorios, cuyo desplazamiento angular realiza el enrollado de la cinta de la bobina alrededor de la tubería. Figura 7. Muestra una vista en perspectiva del detalle de la ubicación de la bobina en el interior de la cámara estanca. Figura 8. -Muestra una vista en sección transversal del aparato de la invención. Figura 9. Muestra una vista en perspectiva del detalle del mecanismo de elevación/descenso del rodillo que tiene una doble función: ubicarse sobre la superficie de la tubería discurriendo alrededor de la misma e impregnándola en una resina, y simultánea o adicionalmente, presionar sobre la lámina de la bobina para realizar el enrollamiento de la misma sobre la tubería. Las figuras 10 a 12. Muestran el detalle del funcionamiento del mecanismo de ele vación/descenso del rodillo. Figura 13. Muestra una vista esquemática de la posición elevada del rodillo. Figura 14. Muestra una vista en perspectiva del detalle del acoplamiento del ej e tubular del rodillo a un depósito de resina para la aplicación de dicha resina sobre la superficie de la tubería. Las figuras 15 y 16. Muestran el detalle del desacoplamiento/acoplamiento de los racores hembra sobre los racores macho para efectuar la conexión del eje tubular del rodillo con los depósitos de resina. DESCRIPCIÓN DE LA FORMA DE REALIZACIÓN PREFERIDA A continuación se realiza una descripción de la invención basada en las figuras anteriormente comentadas. El aparato de la invención comprende una carcasa 1 de configuración tubular que está constituida por dos porciones 2 que se unen entre sí mediante un elemento extensible 7 que permite efectuar la separación/aproximación de dichas porciones 2, y así permitir ubicar la carcasa 1 alrededor de una tubería 5. El elemento extensible es un gato neumático 7. Las porciones 2 se encuentran relacionadas entre sí mediante guías 8 que facilitan la separación/aproximación de dichas porciones 2 al actuar el gato neumático 7. Las porciones 2 se fijan a la tubería 5 mediante bridas extremas 3 que presentan un borde interior 4 que se 5 adapta a la configuración de la tubería 5 mediante una junta estanca (no representada) Sobre cada una de las bridas 3 se encuentra fijado un segmento de collarín 9 mediante un brazo articulado 10, que articula tanto en los segmentos de collarín 9, como sobre 10 las bridas extremas 3. Cada uno de los segmentos de collarín 9 está dotado de medios de unión entre dichos segmentos, que en ej emplo de realización están determinados por pletinas 11 mediante las cuales se efectúa la unión entre los dos segmentos de 15 collarín 9. Además los segmentos de collarín 9 están dotados de unos medios de frenado de la carcasa 1 sobre la tubería 5, cuya funcionalidad será descrita con posterioridad, y que están constituidos por cuñas 12 dispuestas sobre unas guías inclinadas 13 previstas en 2 O soportes 14 fij ados a la cara interna de los segmentos de collarín 9 de forma que las cuñas 12 pueden desplazarse a lo largo de las guías inclinadas 13. Además los soportes 14 son solidarios de unos pivotes guía 15 en los que se ubica un segmento de aro 16 que está unido a las cuñas 12 y a un 25 pistón inflable 17 que también está previsto en la cara interna de los segmentos de collarín 9, de forma que cuando se produce el inflado del pistón inflable 17, se produce la elevación de los segmentos de aro 16 guiados mediante los pivotes de guía, en cuyo desplazamiento arrastran a las 30 cuñas 12 deslizándose por las guías inclinadas 13, de forma que éstas se elevan y alejan de la tubería 5. En cambio al efectuarse el desinflado del pistón 17, se produce el descenso de los segmentos de aro 16 y de las cuñas 12 que presionan contra la tubería realizando el frenado de la misma cuando se proceda a efectuar su reparación. Además en la cara interior de los segmentos de collarín se prevén elementos de deslizamiento de la carcasa 1 sobre la tubería 5, elementos que están constituidos por rodillos 18 asistidos por un resorte 19 con precarga para presionar contra la tubería cuando los segmentos de collarín 9 se unen entre sí. Otro de los elementos previsto en la cara interior de los segmentos de collarín 9, lo constituyen unos palpadores 20 que permiten efectuar la inspección de la tubería. También se pueden disponer sensores de cualquier otro tipo de los conocidos convencionalmente, como por ej emplo sensores de ultrasonidos, e igualmente pueden ubicarse cámaras de visualización de la imagen de la tubería, pero en este último caso dichas cámaras de visualización se ubican en la cara interna de las porciones 2, las cuales no se han representado por resultar obvio para el experto medio en la materia. En base a la descripción realizada, se comprende fácilmente que una vez que las porciones de carcasa 2 se encuentran ubicadas, en su posición separada, alrededor de una tubería 5, se procede a realizar la unión de los segmentos de collarín 9 mediante sus pletinas 11, posición en la que los rodillos 18 presionan contra la tubería 5, tal y como fue indicado anteriormente. El ejemplo de realización de la invención se describe para la aplicación de la carcasa 1 sobre una tubería 5 vertical, de forma que en este caso la carcasa 1 se dispone alrededor de la tubería 5 vertical en la zona en la que sale del agua, por lo que la disposición de la carcasa 1 alrededor de la tubería 5 vertical, tal y como fue descrito anteriormente, se realiza de forma extremadamente sencilla sin necesidad de usar buzos. Cabe señalar que una de las porciones 2 de carcasa 1 está dotada de unas ruedas de transporte 21 que aparte de facilitar el transporte de la carcasa 1, también permiten realizar el apoyo de la misma sobre una superficie prevista en la zona en la que la tubería 5 vertical sale fuera del agua. Además las porciones 2 están dotadas de unos medios de fij ación de un cable de izado, que están determinados por enganches 22, en los que se fijan cables de un dispositivo de izado para realizar el deslizamiento de la carcasa 1 sobre la tubería 5. Así, una vez fijados los segmentos de collarín 9, y mediante el dispositivo de izado se permite descender a la carcasa 1 a lo largo de la tubería 5, de forma que mediante los palpadores 20 se inspecciona el estado de la misma, de forma que los rodillos 18 absorben las irregularidades de la tubería 5 por la acción de los resortes 19 durante el deslizamiento de la carcasa 1 sobre dicha tubería 5. De esta forma, se permite realizar la inspección de la tubería hasta que se detecta una zona que requiere su reparación, punto en el cual se posicionan las porciones 2, y a continuación se activa el gato neumático 7 realizándose la aproximación entre las porciones 2 de forma que el borde interior 4 de las bridas 3, se adapta a la configuración de la tubería 5 mediante una junta estanca 3a, definiendo la carcasa 1 un contorno que envuelve a la tubería 5 estableciendo una cámara estanca 6 entre la carcasa 1 y la tubería 5. Cabe señalar que los palpadores 20, y diferentes elementos que han de ser actuados, se encuentran conectados con un equipo de superficie que permite realizar las funciones comentadas. En el caso de que sean conexiones eléctricas, éstas pueden efectuarse de forma inalámbrica. Una posible conexión con la carcasa 1 con conducciones que discurren hasta la superficie, se representa mediante la referencia 23. Una vez formada la cámara estanca 6, se desinfla el pistón inflable 17, de forma que las cuñas 12 se desplazan sobre las guías inclinadas 13 enclavándose sobre la superficie de la tubería 5, de modo que se produce la fijación de la carcasa 1 sobre la tubería 5. A continuación se procede a vaciar la cámara estanca 6, del agua que contiene en su interior, mediante medios de inyección de aire en la cámara estanca 6 que producen el vaciado del agua a través de válvulas anti-retorno (no representadas) previstas en las porciones 2 de la carcasa lo Estos medios por ejemplo pueden ser un compresor que puede estar ubicado fuera del agua y conectado con las porciones 2 en las que se prevén unas boquillas (no representadas) que insuflan el aire al interior de la cámara estanca 6, desplazando el agua a través de las válvulas anti-retorno. El compresor también puede estar dispuesto sobre una de las porciones 2, y ser actuado desde la superficie. En este punto cabe comentar que las porciones 2 están dotadas de unos pies centradores asistidos por un resorte, que al realizar la aproximación de las porciones 2, apoyan y presionan sobre la superficie de la tubería 5, de forma que se facilita el centrado de las porciones 2 al ubic~rlas sobre la tubería 5. Una vez que la cámara estanca 6 se encuentra vaciada de agua, en el caso en el que la tubería deba de ser limpiada, se prevé la incorporación de medios de limpieza que comprende un depósito de un producto abrasivo, y un compresor conectado con las boquillas previstas en las porciones 2 para proyectar el producto abrasivo de limpieza sobre la tubería y a continuación se activan unos medios de aspiración que succiona todos los residuos producidos en la limpieza, a través de unas boquillas. Los medios de aspiración, también pueden ser empleados como medios de vaciado del agua incluida en la cámara estanca 6. Una vez que la tubería se encuentra lista para ser reparada, la invención prevé que su reparación pueda ser efectuada mediante un rodillo 24, ubicado en el interior de 5 la cámara estanca 6, que mediante unos brazos 27 está fij ado sobre un ej e giratorio 25 asistido por un resorte 26, de forma que los extremos del eje giratorio 25 están fijados sobre dos discos giratorios 28 dispuestas paralelos a las bridas extremas 3, cuyo desplazamiento angular es 10 guiado mediante rodamientos 29 fijados en las bridas extremas 3. Para producir el desplazamiento angular de los discos giratorios 28, se prevé que éstos estén dotados de una corona dentada 31 que engrana con un motor que produce el desplazamiento angular de dichos discos giratorios 28. 15 Por la acción del resorte 26, se mantiene al rodillo 24 presionando sobre la superficie de la tubería 5, de forma que al accionar el motor el rodillo 24 gira alrededor de su eje y alrededor de la tubería 5. El eje del rodillo 24 presenta una configuración 2 O tubular y está conectado con depósitos de resina, y con unos orificios 30 practicados en la superficie del rodillo 24, de forma que al producirse el desplazamiento del rodillo 24 sobre la tubería 30, ésta se impregna de resina proporcionándole una capa de recubrimiento, a modo de 25 pintura, que puede determinar la reparación de dicha tubería, cuando los daños sufridos en la tubería no son elevados. El número de vueltas que el rodillo 24 da alrededor de la tubería 5, varía en función de las necesidades de la reparación a efectuar en la tubería 5. 30 El depósito de resina puede encontrarse en la superficie, o sobre la carcasa 1, de forma que en cualquiera de los casos se encuentra en una posición fija, por lo que para permitir que se produzca el giro del rodillo 24 sobre su ej e y alrededor de la tubería 30, se prevén medios de conexión del ej e tubular del rodillo 24 con los depósitos de resina, para lo que dicha conexión comprende un primer racor hembra 32 y un segundo racor hembra 33 que se encuentran fijados a los discos giratorios 28, de forma que dichos racores 32 y 33 giran junto con los discos giratorios 28, y además están conectados con el eje tubular del rodillo 24. En correspondencia con el primer racor hembra 32 se ha previsto un primer racor macho 35, y en correspondencia con el segundo racor hembra 33 se ha previsto un segundo racor macho 36. El primer y segundo racor macho 35 y 36 están dispuestos sobre un carril semicircular 37 de posición fija y previsto alrededor de la tubería 5, de forma que cada uno de dichos primer y segundo racor macho 35 y 36 están conectados con un depósito de resina mediante una conducción 39, Y a su vez están asistidos por un fleje que los mantiene en el extremo inicial del carril semicircular 37. Además, en el trayecto que realizan el primer y segundo racor hembra 32 y 33, se prevén unas levas 38, de forma que están previstas en correspondencia con el inicio y final de cada carril 37, para producir el desplazamiento de dichos racores hembra 36 y 37 venciendo la acción del resorte 34. En base a la descripción realizada, se comprende fácilmente que cuando el primer racor hembra 32 está acoplado al primer racor macho 35, el giro de los discos giratorios 28 produce el desplazamiento de los racores hembra 32 y 33, de forma que el primer racor hembra 32 arrastra al primer racor macho 35 sobre el carril 37 venciendo la acción del fleje, con lo que cuando llega al final del carril 37 la leva 38 que está dispuesta en la parte inicial del siguiente carril 37, produce la elevación del segundo racor hembra 33 venciendo la acción de su resorte 34, de forma que al dej ar de actuar la leva 38 sobre el segundo racor hembra 33, el resorte 34 produce su descenso, acoplándose sobre el segundo racor macho 36, que mediante la conducción 39 se encuentra unido a un depósito 5 de resina, de forma que la resina circula a través del segundo racor macho 36, del segundo racor hembra 34, hasta que llega hasta el eje tubular del rodillo 24. A continuación el primer racor hembra 32 contacta con la leva 38 situada al inicio del siguiente carril 37, produciendo 10 su elevación y su desconexión respecto del primer racor macho 35, de forma que así se permite mantener siempre la alimentación de la resina al interior del ej e tubular del rodillo 24. En los siguientes 180 0 de desplazamiento angular de los discos giratorios 28, es nuevamente el 15 primer racor macho 35 el que se acopla sobre el primer racor hembra 32 y a continuación se desconecta el segundo racor hembra 33 del segundo racor macho 36, repitiéndose el proceso por cada una de las vueltas que deba de dar el rodillo 24. 2 O En este punto cabe señalar, que el vaciado del agua del interior de la cámara estanca 6, también puede realizarse inyectando aire al ej e del rodillo 24 a través del mecanismo descrito para la inyección de resina al ej e tubular del rodillo 24, pero con la diferencia de que en 25 este caso en lugar de resina se aplica aire comprimido. En el caso en el que el daño sufrido por la tubería no pueda ser reparado mediante la aplicación de una capa de resina, la invención prevé otros medios de reparación que comprenden una caj a estanca 40 que comunica con la cámara 30 estanca 6 mediante una trampilla 41, y de forma que en el interior de la caja estanca 40 se han previsto unas guías telescópicas 42 asistidas por un pistón 43, para ubicar en el extremo inferior de las guías telescópicas 42 una bobina 44, que en el ejemplo de realización de la invención la bobina 44 está dispuesta sobre una soporte 45 que se ubica sobre las guías telescópicas 42. La bobina 44 tiene enrollada una lámina de reparación de tuberías de tipo convencional, de forma que dicha bobina 44 se dispone sobre las guías telescópicas 42 con un tramo de su extremo desenrollado y guiado sobre unos rodillos-guía 46, de modo que el tramo desenrollado se mantiene en posición vertical. Para permitir realizar la reparación mediante la lámina de la bobina 44, ha de realizarse el enrollado de la misma alrededor de la tubería 5, para lo que en el interior de la cámara estanca 6 se prevén sendos brazos 47 cada uno de ellos fij ados sobre los discos giratorios 28, de forma que al actuarse el pistón 43, se produce el desplazamiento de las guías telescópicas 42 que realizan la apertura de la trampilla 41, con lo que la bobina 44 desciende al interior de la cámara estanca 6, hasta que unos pivotes extremos 48 previstos sobre el soporte 45 de la bobina, se introducen en un alojamiento 49 previsto en el extremo de los brazos 47, que mediante un prisionero de bola 50 se produce la entrada de la bola en una muesca practicada en los pivotes extremos 48, fijándose de esta forma la bobina 44 sobre los brazos 47, y todo de forma que el extremo de la lámina del rodillo quede ubicada sobre la superficie de la tubería 5. Además el rodillo 24 se encuentra ubicado en una posición en la que al efectuarse el desplazamiento de los discos giratorios 28, y por tanto el desplazamiento del rodillo 24 y bobina 44, dicho rodillo 24 presiona sobre el extremo de la lámina, realizando su desenrollado, y simultáneamente su enrollado alrededor de la tubería 5. En este caso a la vez que se realiza el enrollado de la lámina alrededor de la tubería 5, también se puede aplicar resina a través de los orificios 30 del rodillo 24 para conseguir un mayor efecto reparador de la tubería 5. Una vez aplicada la resina, bien independientemente o junto con la lámina, según las dos realizaciones descritas, se prevé que el rodillo 24 esté dotado de un mecanismo de elevación/descenso que se complementa con la incorporación de una palanca 51 solidaria del eje giratorio 25 sobre el que se soporta el rodillo 24 mediante los brazos 27 ya descritos, de modo que en el trayecto que realiza la palanca 51, se ha previsto una leva de posición desplazable 52, cuya posición es regulable mediante un pistón 53, de forma que cuando dicha leva desplazable 52 se posiciona en correspondencia con la palanca 51, al contactar con la leva desplazable 52, se produce el desplazamiento angular del eje giratorio 25 venciendo la acción del resorte 26, lo que produce la elevación del rodillo 24, de forma que mediante un pasador 54 se produce el enclavamiento del eje giratorio 25 en la posición en la que el rodillo 24 se encuentra elevado, tal y como se demuestra esquemáticamente en la figura 12. De esta forma, se evita que el rodillo pueda pegarse sobre la superficie de la tubería, una vez que se ha aplicado la resina y se produzca el secado de la misma. Para realizar nuevamente el descenso del rodillo 24 en su posición sobre la tubería 5, se prevé la incorporación de una cuña 55 dispuesta en el trayecto de un elemento desplazable 56 que es solidario del pasador 54, de forma que cuando la cuña 55 contacta con el elemento desplazable 56, venciendo la acción de un resorte 57, que lo asiste, produce el desplazamiento del pasado 54 y el desenclavamiento del eje giratorio 25, que por la acción del resorte 26, desciende hasta presionar con la superficie de la tubería 5, para realizarse una nueva reparación. Para favorecer la reacción química de la resina, y acelerar su secado, se prevé la incorporación de medios de secado que están constituidos por una resistencia de calentamiento de la cámara estanca 6 y del segmento de tubería en el que está instalada la carcasa, para facilitar la reacción química y solidificación de la resina aplicada. Cabe señalar que en el caso en el que la reparación de una tubería requiera el relleno de cavidades detectadas en su superficie, se prevé que la carcasa comprenda un elemento de disparado mediante aire comprimido de bolas de resina para relleno de dichas cavidades detectadas en la superficie de la tubería. Una vez realizada la reparación de la tubería, se procede nuevamente a separar las porciones 2 actuando el elemento extensible 7, permitiéndose continuar el deslizamiento de la carcasa sobre la tubería 5, hasta encontrar una nueva zona dañada, procediéndose a realizar su reparación de la forma ya comentada. Seguidamente se enumeran las diferentes referencias utilizadas en los ej emplos de realización, para facilitar el seguimiento de su explicación: 1. Carcasa 2. Porciones (de carcasa) 3. Bridas extremas 3a. Junta estanca 4. Borde inferior (de bridas extremas) 5. Tubería 6. Cámara estanca 7. Elemento extensible 8. Guías 9. Segmentos de collarín 10. Brazo articulado 11. Pletinas 12. Cuña 13. Guía inclinada 14. Soporte 15. Pivotes guía 16. Segmentos de aro 17. Pistón inflable 18. Rodillos 19. Resorte 20. Palpadores 21. Ruedas de transporte 22. Enganches 23. Conexiones con superficie 24. Rodillo 25. Eje giratorio 26. Resorte 27. Brazos 28. Discos giratorios 29. Rodamientos 30. Orificios 31. Corona dentada 32. Primer racor hembra 33. Segundo racor hembra 34. Resorte 35. Primer racor macho 36. Segundo racor macho 37. Carril 38. Levas 39. Conexión de 35 y 36 con depósito resina 40. Caja estanca 41. Trampilla 42. Guías telescópicas 43. Pistón 44. Bobina 45. Soporte de bobina 46. Rodillos-guía 47. Brazos 48. Pivotes extremos 49. Alojamiento 50. Prisionero de bola 51 . Palanca 52. Leva de posición desplazable 53. Pistón 54. Pasador 55. Cuña 56. Elemento desplazable 57. Resorte
Publicaciones:
ES2387656 (27/09/2012) - A1 Solicitud de patente con informe sobre el estado de la técnica
ES2387656 (05/08/2013) - B1 Patente de invención
Eventos:
En fecha 02/03/2011 se realizó Registro Instancia de Solicitud
En fecha 16/03/2011 se realizó Admisión a Trámite
En fecha 16/03/2011 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 22/07/2011 se realizó 3511X_Petición Copia Certificada
En fecha 28/07/2011 se realizó Solicitud Copia Aprobada
En fecha 28/07/2011 se realizó 1514X_Copia Autorizada en Tramitación
En fecha 28/10/2011 se realizó Continuación del Procedimiento
En fecha 11/11/2011 se realizó Publicación Continuación del Procedimiento
En fecha 13/02/2012 se realizó 1109P_Comunicación Traslado del IET
En fecha 27/09/2012 se realizó Publicación Solicitud
En fecha 27/09/2012 se realizó Publicación Folleto Solicitud con IET (A1)
En fecha 28/01/2013 se realizó Reanudación Procedimiento General de Concesión
En fecha 07/02/2013 se realizó Publicación Reanudación Procedimiento General de Concesión
En fecha 07/05/2013 se realizó Publicación Traslado Observaciones del IET
En fecha 23/07/2013 se realizó Sin Modificación de Reivindicaciones
En fecha 24/07/2013 se realizó Concesión
En fecha 24/07/2013 se realizó 1203P_Notificación Concesión por Procedimiento General de Concesión
En fecha 05/08/2013 se realizó Publicación concesión Patente PGC
En fecha 05/08/2013 se realizó Publicación Folleto Concesión
En fecha 02/12/2013 se realizó Entrega título
En fecha 13/01/2014 se realizó 3412X_Baja Mandatario
En fecha 13/01/2014 se realizó Baja mandatario
En fecha 23/06/2022 se realizó Declaración de Caducidad
En fecha 23/06/2022 se realizó 1560X_Notificación Declaración de Caducidad
En fecha 29/06/2022 se realizó Publicación Declaración de Caducidad
Pagos:
20/08/2013 - Pago Tasas Concesión
20/08/2013 - Pago 03 Anualidad
04/11/2013 - Bono en Pago Tasas Concesión (B1)
04/11/2013 - Bono en Pago 03 Anualidad (B1)
17/02/2014 - Pago 04 Anualidad
23/03/2015 - Bono en Pago 04 Anualidad (B1)
08/03/2016 - Pago 05 Anualidad
22/03/2016 - Pago 06 Anualidad
28/03/2017 - Pago 07 Anualidad
04/04/2018 - Pago 08 Anualidad
03/04/2019 - Pago 09 Anualidad
01/04/2020 - Pago 10 Anualidad
+ ES-2387656_A11. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, que al menos comprende: una carcasa (1) de configuración tubular que está dotadas de dos porciones (2) que se unen entre sí y fijan a una tubería (5) mediante bridas extremas (3) que presentan un borde interior (4) que se adapta a la configuración de dicha tubería (5) mediante una junta estanca (3a) ; siendo la carcasa (1) de contorno que envuelve a la tubería (5) , estableciendo una cámara estanca (6) entre la carcasa (1) y la tubería (5) , medios de vaciado de agua de la cámara estanca (6) ; medios de reparación de tubería previstos en la cámara estanca (6) ; caracterizado por que además comprende: al menos un elemento extensible (7) fijado a las dos porciones (2) , de separación/aproximación de dichas porciones (2) , al menos dos segmentos de collarín (9) complementarios, cada uno de ellos unido articuladamente al menos a uno de los extremos de una de las porciones (2) de la carcasa (1) , comprendiendo a su vez los segmentos de collarín (9) : • medios de unión entre segmentos de collarín, y • elementos de deslizamientos sobre la tubería (5) , donde el al menos elemento extensible (7) está configurado de manera tal que al realizarse la separación de las porciones (2) se permite su ubicación alrededor de la tubería (5) y al aproximarla se acoplan sobre la tubería formando la cámara estanca (6) , Y donde dichos segmentos de collarín (9) están configurados de manera tal que una vez dispuestas las porciones (2) de la carcasa (1) separadas alrededor de la tubería (5) , al fijar los segmentos de collarín (9) entre sí, los medios de deslizamiento apoyan sobre la tubería permitiendo el deslizamiento o guiado de la carcasa (1) sobre dicha tubería (5) hasta una zona seleccionada entre una zona a inspeccionar, una zona a limpiar y una zona a reparar. 2. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 1, caracterizado por que los elementos de deslizamiento sobre la tubería (5) comprenden rodillos (18) asistidos por un resorte (19) con precarga para presionar contra la tubería (5) y al realizar su deslizamiento sobre dicha tubería (5) , absorber las irregularidades de la superficie que pueda presentar dicha tubería (5) . 3. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 1, caracterizado por que los segmentos de collarín (9) comprenden medios de frenado de la carcasa (1) sobre la tubería (5) para impedir su deslizamiento durante una reparación. 4. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 3, caracterizado por que los medios de frenado comprenden cuñas (12) dispuestas en guías inclinadas (13) previstas en soportes (14) fij ados a la cara interna de los segmentos de collarín (9) , para realizar el guiado del desplazamiento simultáneo de las cuñas (12) en sentido axial y radial respecto de la tubería (5) ; estando los soportes (14) dotados de pivotes guía (15) en los que se dispone un segmento de aro (16) por cada segmento de collarín (9) , que están dispuestos perpendicularmente a la cara interior del segmento de collarín (9) ; unidos a las cuñas (12) y a un pistón inflable (17) y asistidos por resortes (19) ; para al inflar el pistón inflable (17) provocar el desplazamiento transversal de los segmentos de aro (16) sobre los segmentos de collarín (9) venciendo la acción de los resortes (19) ; y simultáneamente provocar el desplazamiento radial de las cuñas (12) hacia el exterior de la tubería (5) separándose la misma, y al desinflar el pistón inflable (17) producir el movimiento inverso presionando las cuñas (17) sobre la superficie de la tubería (5) . 5. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 1, caracterizado por que las dos porciones (2) están relacionadas mediante guías de desplazamiento (8) de separación/aproximación de dichas porciones (2) . 6. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 1, caracterizado por que el al menos elemento extensible (7) es un gato neumático, cuyos extremos están fijados a cada una de las porciones (2) . 7. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 1, caracterizado por que comprende sensores de detección del estado de la tubería (5) . 8. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 7, caracterizado por que los sensores de detección del estado de la tubería (5) están seleccionados entre palpadores (20) , sensores de ultrasonidos y cámaras de captación de imagen. 9. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 1, caracterizado por que los medios de reparación de la tubería comprenden: dos discos giratorios (28) dispuestos paralelos a las bridas extremas (3) y que están relacionados con una corona dentada (31) cuyo accionamiento provoca el giro de los discos giratorios alrededor de la tubería (5) , un motor que engrana con la corona dentada (31) para producir el giro de los discos giratorios (28) alrededor de la tubería (5) , un rodillo (24 ) dotado de un eje tubular que comunica con orificios (30) previstos en su superficie, que puede girar sobre su eje tubular y que está dispuesto sobre los discos giratorios (28) mediante un mecanismo de elevación/descenso para ubicar el rodillo (24) sobre la superficie de la tubería (5) presionando sobre la misma, al menos una conexión del ej e tubular del rodillo (24) con un depósito de resina, para al girar el rodillo (24) sobre la superficie de la tubería (5) , aplicarle la resina a dicha superficie de la tubería (5) a través de sus orificios (30) , cubriendo y reparando dicha superficie. 10. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 9, caracterizado por que los medios de reparación de la tubería comprenden: una caja estanca (40) dispuesta longitudinalmente en una de las porciones (2) de la carcasa (1) , que a su vez comprende: • una trampilla (41) que comunica con la cámara estanca, • guías telescópicas (42) en las que está dispuesta, • una bobina (44) de una lámina de reparación de tuberías, que comprende sendos pivotes extremos (48) , la cual se dispone con un tramo extremo de la lámina desenrollado y guiado mediante • rodillos guía (46) que mantienen el tramo desenrollado de la lámina en posición vertical, • un pistón (43) de desplazamiento de dichas guías telescópicas (42) a una posición en la que la bobina (44) se posiciona y fija en un brazo (47) previsto en cada uno de los discos giratorios (28) , y que está dotado de un alojamiento (49) de ubicación y fijación de los pivotes (48) del rodillo (24) , estando el pistón (43) , las guías telescópicas (42) y los brazos (47) configurados de manera tal que al ser actuado el pistón (43) desplaza las guías telescópicas (42) abriendo la trampilla (41) y alojándose los pivotes (48) de la bobina (44) en los aloj amientos (49) de los brazos (47) quedando el extremo desenrollado de la lámina sobre la superficie de la tubería (5) ; y estando dichos brazos (47) ubicados en correspondencia con el rodillo (24) para que al posicionar el extremo de la lámina de la bobina (44) sobre la superficie de la tubería (5) , al realizar el giro de los discos giratorios (28) se ubique el rodillo (24) sobre el extremo de la lámina presionándola contra la superficie de la tubería (5) . 11. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 1, caracterizado por que comprende medios de limpieza de la tubería (5) que incluyen un depósito de un producto abrasivo, un compresor conectado con unas boquillas previstas en las porciones (2) de la carcasa (1) , para proyectar el producto abrasivo de limpieza sobre la tubería (5) ; Y medios de aspiración de los residuos producidos en la limpieza a través de unas boquillas. 12. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 1 o 9, caracterizado por que los medios de vaciado de agua de la cámara estanca están seleccionados entre medios de inyección de aire en la cámara estanca (6) , que producen el vaciado del agua a través de válvulas anti-retorno previstas en las porciones (2) de la carcasa (1) , Y medios de aspiración del agua incluida en la cámara estanca (6) ; comprendiendo los medios de inyección de aire un compresor de aire que se aplica selectivamente sobre inyectores dispuestos en la carcasa (1) , y sobre una conducción que está conect ada al eje tubular de la bobina (44) . 13. -APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 10, caracterizado por que las porciones (2) de carcasa incluyen resistencias de calentamiento de la cámara estanca y del segmento de tubería (5) en la que está instalado, para facilitar la reacción química y solidificación de la resina aplicada y la reacción química y solidificación de la lámina de la bobina (44) sobre la tubería (5) . 14. -APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 1, caracterizado por que las porciones (2) comprenden unos pies centradores asistidos por un resorte para al aproximar las porciones (2) sobre la tubería (5) , los pies centradores apoyan sobre la tubería y realizan el centrado de dichas porciones (2) sobre dicha tubería (5) en la aproximación de las porciones (2) . 15. -APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 7, caracterizado por que comprende un elemento de disparo, mediante aire comprimido, de bolas de resina para relleno de cavidades detectadas en la superficie de la tubería. 16. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicaciones 1 a 7, caracterizado por que comprenden medios de fij ación de un cable de izado de las porciones (2) de la carcasa (1) para disponer dichas porciones (2) alrededor de una tubería vertical fuera del agua y realizar su deslizamiento sobre la tubería (5) mediante el accionamiento de cable de izado. 17. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 1, caracterizado por que comprende un sensor de profundidad. 18. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 9, caracterizado por que el mecanismo de elevación/descenso del rodillo comprende un eje giratorio (25) asistido por un resorte (26) , fij ado a los discos giratorios (28) , Y del que son solidarios sendos brazos extremos (27) en los que está fijado el eje del rodillo (24) , y además el eje giratorio (25) es solidario de una palanca (51) accionable mediante una leva (52) de posición desplazable sobre los discos giratorios (28) mediante un pistón (53) , para posicionar la leva (52) de posición desplazable en el trayecto de la palanca (51) , producir el desplazamiento angular del ej e giratorio (25) venciendo la acción de dicho resorte (26) , y producir la elevación del rodillo (24) ; que mediante un pasador (54) de enclavamiento en el eje giratorio (25) se mantiene en la posición elevada hasta que una cuña (55) dispuesta en los discos giratorios actúa sobre el pasador (54) de enclavamiento produciendo el descenso del rodillo (24) por la acción del resorte (26) hasta que contacta con la tubería. 19. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 9, caracterizado por que la al menos conexión del ej e tubular del rodillo (24) con un depósito de resina comprende: un primer y un segundo racor hembra (32) y (33) contiguos y asistidos por un resorte (34) que están fijados en uno de los discos giratorios (28) , y que mediante una conducción están conectados con el eje tubular del rodillo (24) , un primer y un segundo racor macho (35) y (36) , cada uno de ellos dispuestos en un carril semicircular (37) de posición fij a, previstos alrededor de la tubería (5) y conectados, cada uno de dichos primer y segundo racor macho (35) y (36) , con un depósito de resina; estando los racores macho (35) y (36) asistidos por un fleje que los mantiene en el extremo inicial del carril (37) , dos levas (38) previstas en correspondencia con el inicio y final de cada carril (37) y ubicadas en el trayecto de los racores hembra (32) y (33) , para producir el desplazamiento de dichos racores hembra (32) y (33) venciendo la acción del resorte (34) ; donde los racores hembra (32) y (33) , los racores macho (35) y (36) Y las levas (38) están configurados de manera tal que cuando el primer racor hembra (32) está acoplado al primer racor macho (35) , el giro de los discos giratorios (28) produce el desplazamiento angular de los racores hembra (32) y (33) arrastrando el primer racor hembra (32) al primer racor macho (35) venciendo la acción del fleje, de forma que al llegar al final del carril (37) , la leva inicial (38) del otro carril (37) eleva el segundo racor hembra (33) y produce su acoplamiento en el segundo racor macho (36) , dispuesto en el inicio de carril (37) y seguidamente el primer conector hembra (32) contacta con la leva (38) prevista al final del carril (37) , produciendo la elevación del primer racor hembra (32) venciendo la acción de su resorte (34) Y desconectándolo del primer racor macho (35) , volviendo el primer racor macho (35) a su posición inicial por la acción del fleje. 20. MÉTODO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, mediante el aparato de la reivindicación 1, caracterizado por que comprende: actuar un elemento extensible (7) que está fijado a sendas porciones (2) que forman una carcasa (1) para separarlas y ubicarlas alrededor de una tubería (5) vertical en la zona en la que está fuera del agua, unir dos segmentos de collarín (9) complementarios alrededor de la tubería (5) , donde los segmentos de collarín (9) articulan en al menos uno de los extremos de las porciones (2) , para ubicar unos medios de deslizamiento previstos en los segmentos de collarín (9) presionando sobre la superficie de la tubería, deslizar mediante un dispositivo de izado la carcasa (1) sobre la tubería (5) , detectar el estado de la tubería durante el deslizamiento, mediante sensores previstos en el aparato, parar el deslizamiento en una zona en la que se detecte un daño en la superficie de la tubería (5) , acoplar las porciones (2) sobre la superficie de la tubería (5) en la zona a reparar, formando una cámara estanca (6) , bloquear la posición de la carcasa (1) mediante la actuación de uno de los medios de frenado previstos en el aparato, vaciar el agua del interior de la cámara estanca (6) , reparar la tubería (5) . 21. MÉTODO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 2 O, caracterizado por que comprende una fase de limpieza de la tubería (5) , previa a la fase de reparación, mediante medios de limpieza previstos en el aparato, que aplican un producto abrasivo de limpieza sobre la superficie de la tubería (5) y que posteriormente succionan los residuos resultantes de la limpieza realizada. 22. MÉTODO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 20, caracterizado por que la reparación de la tubería (5) comprende aplicar una resina a un ej e tubular de un rodillo (24) , dispuesto en la cámara estanca (6) presionando sobre la superficie de la tubería (5) , Y aplicar la resina a la superficie de la tubería (5) a través de orificios (30) previstos en la superficie del rodillo (24) al realizar su giro alrededor de su eje y de la tubería (5) . 23. MÉTODO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 20, caracterizado por que la reparación de la tubería comprende las siguientes fases: introducir de forma estanca en la cámara estanca (6) una bobina (44) en la que está enrollada una lámina de reparación de tuberías, en una posición paralela a la tubería (5) , con el extremo de la lámina desenrollado un tramo para que se ubique sobre la tubería (5) , actuar un rodillo (24) dispuesto en la cámara estanca (6) para que presione sobre la superficie de la tubería (5) , efectuando su giro alrededor de su eje y de la tubería (5) para retener el extremo de la lámina de la bobina (44) entre el rodillo (24) y la tubería (5) y desenrollar la lámina de la bobina (44) alrededor de la tubería (5) mediante el desplazamiento del rodillo (24) sobre dicha tubería (5) . 24. MÉTODO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 23, caracterizado por que el enrollado de la lámina alrededor de la tubería (5) comprende una fase de inyección de resina al interior del rodillo (24) , que a través de orificios (30) previstos en dicho rodillo (24) aplica a la lámina para producir el recubrimiento de la superficie de la tubería y su posterior solidificación. . 25. MÉTODO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicaciones 21, 22 Y 23, caracterizado por que las fases de limpieza de la tubería comprenden una fase de aplicación de aire sobre la superficie de la tubería (5) , sobre la que tras la fase de reparación se realiza una fase seleccionada entre una fase de calentamiento de la cámara estanca y de segmento de tubería, y una fase de aplicación de aire, para facilitar la reacción química de la resina, lámina y acelerar su solidificación. 26. MÉTODO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 23, caracterizado por que el vaciado del agua del interior de la cámara estanca (6) se realiza mediante una fase seleccionada entre una fase de inyección de aire que desplaza el agua al exterior de la cámara a través de válvulas anti-retorno, y una fase de aspiración del agua del interior de la cámara estanca (6) .
+ ES-2387656_B11. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, que al menos comprende: una carcasa (1) de configuración tubular que está dotadas de dos porciones (2) que se unen entre sí y fijan a una tubería (5) mediante bridas extremas (3) que presentan un borde interior (4) que se adapta a la configuración de dicha tubería (5) mediante una junta estanca (3a) ; siendo la carcasa (1) de contorno que envuelve a la tubería (5) , estableciendo una cámara estanca (6) entre la carcasa (1) y la tubería (5) , medios de vaciado de agua de la cámara estanca (6) ; medios de reparación de tubería previstos en la cámara estanca (6) ; caracterizado por que además comprende: al menos un elemento extensible (7) fijado a las dos porciones (2) , de separación/aproximación de dichas porciones (2) , al menos dos segmentos de collarín (9) complementarios, cada uno de ellos unido articuladamente al menos a uno de los extremos de una de las porciones (2) de la carcasa (1) , comprendiendo a su vez los segmentos de collarín (9) : • medios de unión entre segmentos de collarín, y • elementos de deslizamientos sobre la tubería (5) , donde el al menos elemento extensible (7) está configurado de manera tal que al realizarse la separación de las porciones (2) se permite su ubicación alrededor de la tubería (5) y al aproximarla se acoplan sobre la tubería formando la cámara estanca (6) , Y donde dichos segmentos de collarín (9) están configurados de manera tal que una vez dispuestas las porciones (2) de la carcasa (1) separadas alrededor de la tubería (5) , al fijar los segmentos de collarín (9) entre sí, los medios de deslizamiento apoyan sobre la tubería permitiendo el deslizamiento o guiado de la carcasa (1) sobre dicha tubería (5) hasta una zona seleccionada entre una zona a inspeccionar, una zona a limpiar y una zona a reparar. 2. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 1, caracterizado por que los elementos de deslizamiento sobre la tubería (5) comprenden rodillos (18) asistidos por un resorte (19) con precarga para presionar contra la tubería (5) y al realizar su deslizamiento sobre dicha tubería (5) , absorber las irregularidades de la superficie que pueda presentar dicha tubería (5) . 3. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 1, caracterizado por que los segmentos de collarín (9) comprenden medios de frenado de la carcasa (1) sobre la tubería (5) para impedir su deslizamiento durante una reparación. 4. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 3, caracterizado por que los medios de frenado comprenden cuñas (12) dispuestas en guías inclinadas (13) previstas en soportes (14) fij ados a la cara interna de los segmentos de collarín (9) , para realizar el guiado del desplazamiento simultáneo de las cuñas (12) en sentido axial y radial respecto de la tubería (5) ; estando los soportes (14) dotados de pivotes guía (15) en los que se dispone un segmento de aro (16) por cada segmento de collarín (9) , que están dispuestos perpendicularmente a la cara interior del segmento de collarín (9) ; unidos a las cuñas (12) y a un pistón inflable (17) y asistidos por resortes (19) ; para al inflar el pistón inflable (17) provocar el desplazamiento transversal de los segmentos de aro (16) sobre los segmentos de collarín (9) venciendo la acción de los resortes (19) ; y simultáneamente provocar el desplazamiento radial de las cuñas (12) hacia el exterior de la tubería (5) separándose la misma, y al desinflar el pistón inflable (17) producir el movimiento inverso presionando las cuñas (17) sobre la superficie de la tubería (5) . 5. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 1, caracterizado por que las dos porciones (2) están relacionadas mediante guías de desplazamiento (8) de separación/aproximación de dichas porciones (2) . 6. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 1, caracterizado por que el al menos elemento extensible (7) es un gato neumático, cuyos extremos están fijados a cada una de las porciones (2) . 7. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 1, caracterizado por que comprende sensores de detección del estado de la tubería (5) . 8. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 7, caracterizado por que los sensores de detección del estado de la tubería (5) están seleccionados entre palpadores (20) , sensores de ultrasonidos y cámaras de captación de imagen. 9. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 1, caracterizado por que los medios de reparación de la tubería comprenden: dos discos giratorios (28) dispuestos paralelos a las bridas extremas (3) y que están relacionados con una corona dentada (31) cuyo accionamiento provoca el giro de los discos giratorios alrededor de la tubería (5) , un motor que engrana con la corona dentada (31) para producir el giro de los discos giratorios (28) alrededor de la tubería (5) , un rodillo (24 ) dotado de un eje tubular que comunica con orificios (30) previstos en su superficie, que puede girar sobre su eje tubular y que está dispuesto sobre los discos giratorios (28) mediante un mecanismo de elevación/descenso para ubicar el rodillo (24) sobre la superficie de la tubería (5) presionando sobre la misma, al menos una conexión del ej e tubular del rodillo (24) con un depósito de resina, para al girar el rodillo (24) sobre la superficie de la tubería (5) , aplicarle la resina a dicha superficie de la tubería (5) a través de sus orificios (30) , cubriendo y reparando dicha superficie. 10. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 9, caracterizado por que los medios de reparación de la tubería comprenden: una caja estanca (40) dispuesta longitudinalmente en una de las porciones (2) de la carcasa (1) , que a su vez comprende: • una trampilla (41) que comunica con la cámara estanca, • guías telescópicas (42) en las que está dispuesta, • una bobina (44) de una lámina de reparación de tuberías, que comprende sendos pivotes extremos (48) , la cual se dispone con un tramo extremo de la lámina desenrollado y guiado mediante • rodillos guía (46) que mantienen el tramo desenrollado de la lámina en posición vertical, • un pistón (43) de desplazamiento de dichas guías telescópicas (42) a una posición en la que la bobina (44) se posiciona y fija en un brazo (47) previsto en cada uno de los discos giratorios (28) , y que está dotado de un alojamiento (49) de ubicación y fijación de los pivotes (48) del rodillo (24) , estando el pistón (43) , las guías telescópicas (42) y los brazos (47) configurados de manera tal que al ser actuado el pistón (43) desplaza las guías telescópicas (42) abriendo la trampilla (41) y alojándose los pivotes (48) de la bobina (44) en los aloj amientos (49) de los brazos (47) quedando el extremo desenrollado de la lámina sobre la superficie de la tubería (5) ; y estando dichos brazos (47) ubicados en correspondencia con el rodillo (24) para que al posicionar el extremo de la lámina de la bobina (44) sobre la superficie de la tubería (5) , al realizar el giro de los discos giratorios (28) se ubique el rodillo (24) sobre el extremo de la lámina presionándola contra la superficie de la tubería (5) . 11. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 1, caracterizado por que comprende medios de limpieza de la tubería (5) que incluyen un depósito de un producto abrasivo, un compresor conectado con unas boquillas previstas en las porciones (2) de la carcasa (1) , para proyectar el producto abrasivo de limpieza sobre la tubería (5) ; Y medios de aspiración de los residuos producidos en la limpieza a través de unas boquillas. 12. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 1 o 9, caracterizado por que los medios de vaciado de agua de la cámara estanca están seleccionados entre medios de inyección de aire en la cámara estanca (6) , que producen el vaciado del agua a través de válvulas anti-retorno previstas en las porciones (2) de la carcasa (1) , Y medios de aspiración del agua incluida en la cámara estanca (6) ; comprendiendo los medios de inyección de aire un compresor de aire que se aplica selectivamente sobre inyectores dispuestos en la carcasa (1) , y sobre una conducción que está conectada al eje tubular de la bobina (44) . 13. -APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 10, caracterizado por que las porciones (2) de carcasa incluyen resistencias de calentamiento de la cámara estanca y del segmento de tubería (5) en la que está instalado, para facilitar la 15 reacción química y solidificación de la resina aplicada y la reacción química y solidificación de la lámina de la bobina (44) sobre la tubería (5) . 14 . -APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 1, caracterizado por que las porciones 20 (2) comprenden unos pies centradores asistidos por un resorte para al aproximar las porciones (2) sobre la tubería (5) , los pies centradores apoyan sobre la tubería y realizan el centrado de dichas porciones (2) sobre dicha tubería (5) en la aproximación de las porciones (2) . 25 15. -APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 7, caracterizado por que comprende un elemento de disparo, mediante aire comprimido, de bolas de resina para relleno de cavidades detectadas en la superficie de la tubería. 3 O 16. -APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicaciones 1 a 7, caracterizado por que comprenden medios de fijación de un cable de izado de las porciones (2) de la carcasa (1) para disponer dichas porciones (2) alrededor de una tubería vertical fuera del 35 agua y realizar su deslizamiento sobre la tubería (5) mediante el accionamiento de cable de izado. 17. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 1, caracterizado por que comprende un sensor de profundidad. 18. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 9, caracterizado por que el mecanismo de elevación/descenso del rodillo comprende un eje giratorio (25) asistido por un resorte (26) , fij ado a los discos giratorios (28) , Y del que son solidarios sendos brazos extremos (27) en los que está fijado el eje del rodillo (24) , y además el eje giratorio (25) es solidario de una palanca (51) accionable mediante una leva (52) de posición desplazable sobre los discos giratorios (28) mediante un pistón (53) , para posicionar la leva (52) de posición desplazable en el trayecto de la palanca (51) , producir el desplazamiento angular del ej e giratorio (25) venciendo la acción de dicho resorte (26) , y producir la elevación del rodillo (24) ; que mediante un pasador (54) de enclavamiento en el eje giratorio (25) se mantiene en la posición elevada hasta que una cuña (55) dispuesta en los discos giratorios actúa sobre el pasador (54) de enclavamiento produciendo el descenso del rodillo (24) por la acción del resorte (26) hasta que contacta con la tubería. 19. APARATO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 9, caracterizado por que la al menos conexión del ej e tubular del rodillo (24) con un depósito de resina comprende: un primer y un segundo racor hembra (32) y (33) contiguos y asistidos por un resorte (34) que están fijados en uno de los discos giratorios (28) , y que mediante una conducción están conectados con el eje tubular del rodillo (24) , un primer y un segundo racor macho (35) y (36) , cada uno de ellos dispuestos en un carril semicircular (37) de posición fij a, previstos alrededor de la tubería (5) y conectados, cada uno de dichos primer y segundo racor macho (35) y (36) , con un depósito de resina; estando los racores macho (35) y (36) asistidos por un fleje que los mantiene en el extremo inicial del carril (37) , dos levas (38) previstas en correspondencia con el inicio y final de cada carril (37) y ubicadas en el trayecto de los racores hembra (32) y (33) , para producir el desplazamiento de dichos racores hembra (32) y (33) venciendo la acción del resorte (34) ; donde los racores hembra (32) y (33) , los racores macho (35) y (36) Y las levas (38) están configurados de manera tal que cuando el primer racor hembra (32) está acoplado al primer racor macho (35) , el giro de los discos giratorios (28) produce el desplazamiento angular de los racores hembra (32) y (33) arrastrando el primer racor hembra (32) al primer racor macho (35) venciendo la acción del fleje, de forma que al llegar al final del carril (37) , la leva inicial (38) del otro carril (37) eleva el segundo racor hembra (33) y produce su acoplamiento en el segundo racor macho (36) , dispuesto en el inicio de carril (37) y seguidamente el primer conector hembra (32) contacta con la leva (38) prevista al final del carril (37) , produciendo la elevación del primer racor hembra (32) venciendo la acción de su resorte (34) Y desconectándolo del primer racor macho (35) , volviendo el primer racor macho (35) a su posición inicial por la acción del fleje. 20. MÉTODO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, mediante el aparato de la reivindicación 1, caracterizado por que comprende: actuar un elemento extensible (7) que está fijado a sendas porciones (2) que forman una carcasa (1) para separarlas y ubicarlas alrededor de una tubería (5) vertical en la zona en la que está fuera del agua, unir dos segmentos de collarín (9) complementarios alrededor de la tubería (5) , donde los segmentos de collarín (9) articulan en al menos uno de los extremos de las porciones (2) , para ubicar unos medios de deslizamiento previstos en los segmentos de collarín (9) presionando sobre la superficie de la tubería, deslizar mediante un dispositivo de izado la carcasa (1) sobre la tubería (5) , detectar el estado de la tubería durante el deslizamiento, mediante sensores previstos en el aparato, parar el deslizamiento en una zona en la que se detecte un daño en la superficie de la tubería (5) , acoplar las porciones (2) sobre la superficie de la tubería (5) en la zona a reparar, formando una cámara estanca (6) , bloquear la posición de la carcasa (1) mediante la actuación de uno de los medios de frenado previstos en el aparato, vaciar el agua del interior de la cámara estanca (6) , reparar la tubería (5) . 21. MÉTODO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 2 O, caracterizado por que comprende una fase de limpieza de la tubería (5) , previa a la fase de reparación, mediante medios de limpieza previstos en el aparato, que aplican un producto abrasivo de limpieza sobre la superficie de la tubería (5) y que posteriormente succionan los residuos resultantes de la limpieza realizada. 22. MÉTODO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 20, caracterizado por que la reparación de la tubería (5) comprende aplicar una resina a un ej e tubular de un rodillo (24) , dispuesto en la cámara estanca (6) presionando sobre la superficie de la tubería (5) , Y aplicar la resina a la superficie de la tubería (5) a través de orificios (30) previstos en la superficie del rodillo (24) al realizar su giro alrededor de su eje y de la tubería (5) . 23. MÉTODO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 20, caracterizado por que la reparación de la tubería comprende las siguientes fases: introducir de forma estanca en la cámara estanca (6) una bobina (44) en la que está enrollada una lámina de reparación de tuberías, en una posición paralela a la tubería (5) , con el extremo de la lámina desenrollado un tramo para que se ubique sobre la tubería (5) , actuar un rodillo (24) dispuesto en la cámara estanca (6) para que presione sobre la superficie de la tubería (5) , efectuando su giro alrededor de su eje y de la tubería (5) para retener el extremo de la lámina de la bobina (44) entre el rodillo (24) y la tubería (5) y desenrollar la lámina de la bobina (44) alrededor de la tubería (5) mediante el desplazamiento del rodillo (24) sobre dicha tubería (5) . 24. MÉTODO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 23, caracterizado por que el enrollado de la lámina alrededor de la tubería (5) comprende una fase de inyección de resina al interior del rodillo (24) , que a través de orificios (30) previstos en dicho rodillo (24) aplica a la lámina para producir el recubrimiento de la superficie de la tubería y su posterior solidificación. . 25. MÉTODO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicaciones 21, 22 Y 23, caracterizado por que las fases de limpieza de la tubería comprenden una fase de aplicación de aire sobre la superficie de la tubería (5) , sobre la que tras la fase de reparación se realiza una fase seleccionada entre una fase de calentamiento de la cámara estanca y de segmento de tubería, y una fase de aplicación de aire, para facilitar la reacción química de la resina, lámina y acelerar su solidificación. 26. MÉTODO DE REPARACIÓN DE TUBERÍAS SUBMARINAS, según reivindicación 23, caracterizado por que el vaciado del agua del interior de la cámara estanca (6) se realiza mediante una fase seleccionada entre una fase de inyección de aire que desplaza el agua al exterior de la cámara a través de válvulas anti-retorno, y una fase de aspiración del agua del interior de la cámara estanca (6) . /221 FIG. 1 - FIG.2 FIG.3 FIG.4 \.O • C) U FIG.6 /' / / / { \ \ o o \ 50 / \ \ ____ ./'" 44 FlG.7 22 29 6 28 35 2 FIG.8 29 .~ \ \ \. 53 FIG.9 FIG. 10 FIG. 11 UEtf -:1ffi~ 57 FIG. 12 FIG. 13 FIG. 14 ce C"') en C"') C"') ce C"') C\J c.o C"') LO , ..... • -
Los productos y servicios protegidos por este registro son:
F16L 55/18 - F16L 55/175
Descripciones:
+ ES-2387656_A1 APARATO Y MÉTODO DE REPARACIÓN DE TUBERÍAS SUBMARINAS OBJETO DE LA INVENCIÓN La presente invención, tal y como se expresa en el enunciado de esta memoria descriptiva, se refiere a un 5 aparato y a un método que permiten efectuar la reparación de tuberías submarinas, como por ejemplo puede ser reparar fugas, zonas dañadas por corrosión, etc.; y que tiene por objeto dotar al aparato de medios de deslizamientos sobre la tubería que permiten desplazar el aparato a lo largo de la tubería hasta la zona a reparar. Es otro objeto de la invención el permitir realizar la inspección de la tubería mediante el deslizamiento del aparato sobre la misma, hasta que se detecte una zona en la que la tubería se encuentra dañada, permitiendo realizar a continuación la reparación de dicha zona dañada, de acuerdo con el aparato y método de la invención. También es objeto de la invención el permitir efectuar la reparación de la tubería, mediante la aplicación de una capa de resina sobre la misma, a modo de pintado, y/o mediante la aplicación de una lámina reparadora alrededor de la tubería. La invención permite realizar la limpieza de la tubería previamente a su reparación. Por tanto la invención permite inspeccionar, limpiar, y/o reparar la tubería. La invención es aplicable en cualquier tipo de tubería submarina, como por ejemplo pueden ser tubería horizontales, verticales o codos, de forma que en el caso de aplicarse a tuberías verticales, permite ubicar el aparato sobre la tubería una zona fuera del agua, y deslizar el aparato a lo largo de la tubería mediante un dispositivo de izado hasta detectar una zona dañada, lo que permite efectuar su posterior limpieza y/o reparación. En el caso en el que se aplique a una tubería horizontal el deslizamiento se puede efectuar de forma manual o mediante un robot o mediante cualquier otro dispositivo que permita desplazar al aparato sobre la tubería. ANTECEDENTES DE LA INVENCIÓN El antecedente más próximo a la invención lo constituye la patente española con número de solicitud 2 O O 1 O 3 11 5 O , en 1 a que se enseña el uso de una carcasa de configuración tubular que está dotada de dos porciones que se unen entre sí y fij an a una tubería mediante bridas extremas que presentan un borde interior que se adapta a la configuración de dicha tubería mediante una junta estanca, siendo la carcasa de contorno que envuelve a la tubería, de forma que se establece una cámara estanca entre la carcasa y la tubería. Además comprende medios de vaciado del agua de dicha cámara estanca, mediante la inyección de aire que evacua el agua a través de válvulas anti-retorno previstas en la carcasa, de forma que una vez vaciada de agua la cámara estanca, se realiza la reparación de la tubería mediante la aplicación de una lámina convencional, de reparación de tuberías, alrededor de la zona dañada. La lámina se adquiere enrollada en bobinas, de forma que para efectuar la reparación de la tubería el dispositivo comprende un cargador estanco de bobinas mediante el cual se introduce la bobina en la cámara estanca sobre unos discos giratorios, y todo ello de forma que el extremo de la lámina se encuentra desenrollado y se posiciona sobre la superficie de la tubería. Además comprende un rodillo que queda ubicado en correspondencia con el extremo de la lámina situada sobre la superficie de la tubería, de modo que dicha bobina también se encuentra ubicada sobre los discos giratorios, con lo que al producir su giro se produce el desplazamiento angular de la bobina y del rodillo alrededor de la tubería a reparar, envolviendo la lámina la zona dañada, realizándose de este modo su reparación. En el documento de patente citado, se requiere realizar el montaje de las porciones de carcasa en la zona dañada de forma manual por buzos, y no se permite deslizar el dispositivo sobre la tubería, para deslizarla a lo largo de la misma y efectuar su inspección, de forma que cuando se detecte una zona dañada se acoplen automáticamente las porciones de carcasa sobre la superficie de la tubería en la zona a reparar, realizándose posteriormente la reparación. La invención permite deslizar el aparato sobre la tubería, de modo que puede realizar la inspección, limpieza y/o reparación de la misma de forma automática, eliminando la necesidad del montaje manual mediante buzos. DESCRIPCIÓN DE LA INVENCIÓN Para conseguir los objetivos y resolver los inconvenientes anteriormente indicados, la invención proporciona un nuevo aparato y método de reparación de tuberías submarinas. El aparato de la invención, al igual que el dispositivo del documento citado en el estado de la técnica, comprende una carcasa de configuración tubular que está dotada de dos porciones que se unen entre sí y fijan a una tubería mediante bridas extremas que presentan un borde inferior que se adapta a la configuración de dicha tubería mediante una junta estanca, todo ello de manera que la carcasa presenta un contorno que envuelve a la tubería, estableciendo una cámara estanca entre la carcasa y la tubería, de forma que dicha cámara estanca se vacía del agua que en ella queda alojada tras montar la carcasa sobre la tubería. Este vaciado se realiza mediante medios de vaciado de agua, lo que permite realizar la reparación posterior de la tubería de acuerdo con los medios que el aparato de invención prevé, y que serán descritos con posterioridad. La principal novedad de la invención reside en que además de los elementos anteriormente descritos, comprende al menos un elemento extensible fijado a las dos porciones de la carcasa, de modo que dicho elemento extensible permite efectuar la separación/aproximación de las dos porciones. Además el aparato comprende al menos dos segmentos de collarín complementarios, cada uno de ellos unido articuladamente a al menos uno de los extremos de una de las porciones de carcasa, comprendiendo, a su vez, los 5 segmentos de collarín medios de unión entre segmentos y elementos de deslizamiento sobre la tubería. El al menos elemento extensible está configurado de manera tal que al realizarse la separación de las porciones, se permite su ubicación alrededor de la tubería 10 y al aproximarlas se acoplan sobre la tubería formando la cámara estanca. Además dichos segmentos de collarín están configurados de manera tal que una vez dispuestas las porciones de carcasa separadas alrededor de la tubería, al fij ar los segmentos de collarín entre sí, los medios de 15 deslizamiento apoyan sobre la tubería permitiendo realizar el deslizamiento guiado de la carcasa sobre dicha tubería hasta una zona a reparar. En la realización preferente de la invención los elementos de deslizamiento sobre la tubería comprenden 2 O rodillos que están asistidos por un resorte con precarga para presionar contra la tubería. Esta configuración permite que al realizar el deslizamiento del aparato sobre la tubería, los resortes absorban las irregularidades que dicha tubería pueda presentar. 25 Además en la realización preferente de la invención se prevé que los segmentos de collarín estén dotados de medios de frenado de la carcasa sobre la tubería para impedir su desplazamiento durante una reparación, lo cual es especialmente útil cuando el aparato de la invención se 30 aplica sobre tuberías verticales, ya que en éstas una vez que se ha efectuado el vaciado del agua del interior de la cámara estanca, la carcasa tiende a flotar y por tanto, ascender a lo largo de la tubería, lo cual se impide con dichos medios de frenado, los cuales comprenden cuñas que 35 están dispuestas sobre guías inclinadas previstas en soportes que están fijados en la cara interna de los segmentos de collarín, de forma que dichas guías permiten efectuar el desplazamiento guiado simultaneo de las cuñas en sentido axial y radial respecto de la tubería. Además los soportes están dotados de pivotes-guía en los que se dispone un segmento de aro por cada segmento de collarín, de forma que cada segmento de aro queda dispuesto perpendicularmente a la cara interior del collarín, unidos a las cuñas y a un pistón inflable, al tiempo que se encuentran asistidos por resortes, de forma que esta configuración permite que al inflar el pistón inflable se provoque el desplazamiento transversal de los segmentos de aro sobre los segmentos de collarín venciendo la acción del resorte, lo que provoca simultáneamente el desplazamiento radial y longitudinal de las cuñas hacia el exterior de la tubería separándose de la misma, y de manera que al desinflar el pistón, se produce el movimiento inverso, presionando las cuñas sobre la superficie de la tubería, anclándose el aparato en la posición sobre la tubería en la que se ha efectuado el desinflado del pistón. Para facilitar la separación/aproximación de las porciones de la carcasa, se prevé que las dos porciones se encuentren relacionadas entre sí mediante guías del desplazamiento de separación/aproximación de dichas porciones. Dicho elemento extensible, está constituido por un gato neumático, cuyos extremos están fijados a cada una de las porciones, de forma que la extensión del gato neumático produce la separación entre las porciones de la carcasa, y su acortamiento, produce el acoplamiento de las dos porciones de carcasa sobre la tubería en la zona a reparar. Para permitir efectuar la inspección de la tubería, se prevé que el aparato incorpore sensores de detección de dicho estado de la tubería, como pueden ser palpadores, sensores de ultrasonidos y cámaras de captación de imagen, que pueden ubicarse en cualquier lugar del aparato de la invención, como por ejemplo, en el caso de los palpadores y sensores de ultrasonidos, estos pueden estar previstos sobre los segmentos de collarín, y para el caso de las cámaras de captación de imagen, se pueden disponer en la cara interior de las porciones de carcasa. Respecto a los medios de reparación de la tubería, en una realización de la invención, comprenden dos discos giratorios dispuestos paralelos a las bridas extremas y que están relacionados con una corona dentada cuyo giro provoca el desplazamiento angular de los discos giratorios alrededor de la tubería, para lo que se prevé un motor que engrana con la corona dentada para producir el desplazamiento angular de los discos giratorios alrededor de dicha tubería. Además los medios de reparación de tuberías están dotados de un rodillo cuyo ej e presenta una configuración tubular que comunica con orificios previstos en la superficie del rodillo, y todo ello de forma que dicho rodillo puede girar sobre su ej e y estar dispuesto sobre los discos giratorios mediante un mecanismo de elevación/descenso para permitir ubicar el rodillo sobre la superficie de la tubería presionando sobre la misma; contando con al menos una conexión del eje tubular del rodillo con un depósito de resina, de modo que al girar el rodillo sobre la superficie de la tubería mediante la actuación del motor, se aplica la resina sobre dicha superficie de la tubería a través de los orificios de la bobina, estableciendo un recubrimiento de resina que determina la reparación de la tubería. Obviamente el rodillo puede dar un número de vueltas variable en función de la reparación a realizar para proporcionar un recubrimiento de un cierto espesor que permita realizar la referida reparación. En la realización preferente de la invención el mecanismo de elevación/descenso del rodillo comprende un ej e giratorio asistido por un resorte, que está fij ado en los discos giratorios y del que son solidarios dos brazos, en cuyos extremos está fijado el eje del rodillo. Además el eje giratorio es solidario de una palanca accionable mediante una leva de posición desplazable, mediante un pistón, sobre los discos giratorios, de manera que al posicionar la leva en el trayecto de la palanca se produce el desplazamiento angular del eje giratorio, venciendo la acción del resorte, lo que determina la elevación del rodillo. Al producirse la elevación del rodillo, se produce el enclavamiento del eje giratorio en esta posición, mediante un pasador que se enclava en dicho eje giratorio que mantiene al rodillo en la posición elevada hasta que una cuña dispuesta en los discos giratorios actúa sobre el pasador de enclavamiento produciendo su desenclava miento y el descenso del rodillo por la acción del resorte, ubicándose el rodillo en la posición en la que contacta y presiona contra la tubería. La elevación del rodillo evita que se pueda pegar sobre la superficie de la tubería al secarse la resina. Respecto a la al menos conexión del ej e tubular del rodillo con un depósito de resina, ésta comprende un primer y un segundo racor hembra contiguos y asistidos por un resorte que están fijados en uno de los discos giratorios y que mediante una conducción están conectados con el ej e tubular del rodillo. Dicha conexión del ej e tubular del rodillo con un depósito de resina, también un comprende un primer y un segundo racor macho, cada uno de ellos dispuesto en un carril semicircular de posición fija en las porciones de carcasa. Estos carriles están previstos alrededor de la tubería y conectados, cada uno de ellos, con un depósito de resina. Los racores macho están asistidos por un fleje que los mantiene en el extremo inicial del carril. Además dichos medios de conexión del eje tubular del rodillo con un depósito de resina incluyen dos levas que están previstas en correspondencia con el inicio y final de cada carril y ubicadas en el trayecto de los racores hembra, para producir el desplazamiento de dichos racores hembra venciendo la acción del resorte al contactar con las levas. En base a la configuración descrita se comprende que estando el primer racor hembra acoplado al primer racor macho, el giro de los discos giratorios produce el desplazamiento de los racores hembra arrastrando el primer racor hembra al primer racor macho venciendo la acción del fleje, de forma que al llegar al final del carril, la leva inicial del otro carril eleva el segundo racor hembra y produce su acoplamiento en el segundo racor macho dispuesto en el inicio del carril, y seguidamente el primer conector hembra contacta con la leva prevista en el final del carril produciendo la elevación del primer racor hembra venciendo la acción de su resorte y desconectándolo del primer racor macho, de forma que dicho primer racor macho vuelve a su posición inicial por la acción del flej e. El proceso se repite con cada media vuelta de los discos giratorios. En otra realización de la invención los medios de reparación de la tubería comprenden una caj a estanca que está dispuesta longitudinalmente en una de las porciones de la carcasa, de forma que dicha caja estanca está dotada de una trampilla que comunica con la cámara estanca, comprendiendo además guías telescópicas en las que está dispuesta una bobina en la que está enrollada una lámina de reparación de tuberías. La bobina comprende sendos pivotes extremos, de forma que la bobina se dispone con un tramo extremo de la lámina desenrollado y guiado mediante rodillos-guía que mantienen el tramo desenrollado de la lámina en posición vertical. Además la caj a estanca está dotada de un pistón de desplazamiento de dichas guías telescópicas, para desplazarlas a una posición en la que la bobina se posiciona fija en un brazo previsto en cada uno de los dos discos giratorios, para lo que dichos brazos están dotados de un alojamiento de ubicación y fijación de los pivotes incluidos en el rodillo. En base a la descripción realizada, se comprende fácilmente que al ser actuado el pistón se desplazan las guías telescópicas abriendo la trampilla y aloj ándose los pivotes de la bobina en los alojamientos de los soportes, de forma que el extremo desenrollado de la lámina queda ubicado sobre la superficie de la tubería. Además los brazos en los que se retiene la bobina, están ubicados en correspondencia con el rodillo, de manera que al posicionar el extremo de la lámina de la bobina sobre la superficie de la tubería, y al realizar el giro de los discos giratorios, el rodillo se dispone sobre el extremo de la lámina, presionándola contra la superficie de la tubería, y permitiendo así realizar el enrollamiento de la lámina alrededor de la tubería cuando se produce el desplazamiento angular de los discos giratorios. En una realización de la invención se prevé que el aparato de la invención esté dotado de medios de limpieza de la tubería, que comprenden un depósito de un producto abrasivo, un compresor conectado con unas boquillas previstas en las porciones de carcasa, de forma que al activarse el compresor se proyecta el producto abrasivo de limpieza sobre la tubería, realizándose de esta forma la limpieza de la tubería en la zona a reparar; limpieza que se complementa mediante la incorporación de medios de aspiración de los residuos producidos en la limpieza a través de unas boquillas previstas en las porciones de carcasa. Respecto a los medios de vaciado del agua de la cámara estanca, que fueron comentados anteriormente, en una realización de la invención se prevé que éstos estén constituidos por medios de inyección de aire en la cámara estanca que producen el vaciado del agua a través de válvulas anti-retorno previstas en las porciones de carcasa. Los medios de inyección de aire comprenden un compresor de aire que se aplica selectivamente sobre inyectores dispuestos en la carcasa, o sobre una conducción que está conectada al ej e tubular de la bobina, de forma que el aire se aplica al interior de la cámara estanca a través de los orificios previstos en dicha bobina, que fueron descritos anteriormente. Cabe comentar que las boquillas y compresores, pueden ser compartidos, tanto por los medios de vaciado del agua de la cámara estanca, como por los medios de limpieza o los medios de aspiración. En una realización de la invención la carcasa incluye resistencias de calentamiento de la cámara estanca y del segmento de tubería en la que está instalado el aparato, para facilitar la reacción química y solidificación de la resina aplicada, en el caso en el que únicamente la reparación se realiza mediante resina, y también permite facilitar la reacción química y solidificación de la lámina de la bobina sobre la tubería, cuando en la reparación se utiliza una lámina, tal y como ya fue descrito. Para facilitar el acoplamiento de las porciones de carcasa sobre la tubería, se prevé que dichas porciones de carcasa comprendan unos pies centradores asistidos por un resorte, para al aproximar las porciones sobre la tubería, los pies centradores apoyan sobre la tubería y realizan el centrado sobre ésta de dichas porciones. Para el caso en el que las tuberías presenten daños de considerable espesor, se prevé que el aparato de la invención comprenda un elemento de disparo, mediante aire comprimido, de bolas de un compuesto químico para el relleno de las cavidades detectadas en la superficie de la tubería, de forma que a continuación se permita efectuar la reparación de la misma tal y como ya fue descrito. Según fue comentado con anterioridad, la invención es aplicable tanto en tuberías submarinas horizontales como verticales, resultando su aplicación más ventaj osa en las tuberías verticales, para lo que en este caso el aparato está dotado de medios de fij ación de un cable de izado de las porciones de carcasa, para disponerlas alrededor de una tubería vertical fuera o dentro del agua, de manera que una fij ados los segmentos de collarín, se permite actuando los medios de izado, y descender por deslizamiento las porciones de carcasa a lo largo de la tubería, e inspeccionar la misma, hasta detectar una zona dañada, realizándose la reparación tal y como ya fue comentado. El aparato de la invención también comprende un sensor de profundidad, para establecer la profundidad a la que se encuentran las diferentes zonas dañadas en la tubería. Además la invención se refiere a un método de reparación de tuberías, mediante el aparato descrito, que comprende una fase en la que se actúa el elemento extensible que está fij ado a las porciones que forman la carcasa del aparato, para separarlas y permitir ubicarlas alrededor de una tubería vertical en la zona en la que está fuera del agua, lo que a continuación permite unir los segmentos de collarín complementarios alrededor de la tubería, en donde los segmentos de collarín articulan en al menos uno de los extremos de las porciones, para ubicar los medios de deslizamiento previstos en los segmentos de collarín presionando sobre la tubería, lo que permite realizar deslizar a lo largo de la tubería el aparato actuando el dispositivo de izado, y detectar el estado de la tubería mediante los sensores previstos en dicho aparato, de forma que una vez que se detecte una zona dañada, se detiene el deslizamiento del aparato sobre la tubería, y se acoplan las porciones sobre la superficie de tubería en la zona a reparar, mediante la actuación del elemento extensible, formando la cámara estanca, de forma que a continuación se bloquea la posición de la carcasa mediante la actuación de los medios de frenado, y se vacía el agua del interior de la cámara estanca, para a continuación efectuarse la limpieza de la tubería, si así fuera necesario y su posterior reparación. En una realización de la invención la reparación de la tubería comprende aplicar una resina a un eje tubular de un rodillo, dispuesto en la cámara estanca presionando sobre la superficie de la tubería, y aplicar la resina a la superficie de la tubería a través de orificios previstos en la superficie del rodillo al realizar su giro alrededor de su eje y de la tubería. En otra realización de la invención la reparación se realiza mediante la introducción, de forma estanca en la cámara estanca, de una bobina en una posición paralela a la tubería, con el extremo de la lámina desenrollado un tramo que determina que la lámina se ubique sobre la tubería, de forma que a continuación se actúa el rodillo para que quede ubicado sobre la superficie de la tubería presionando contra la misma, y a continuación al efectuarse el giro de los discos giratorios, y por tanto del rodillo alrededor de la tubería y de su ej e, presiona sobre el extremo de la lámina de la bobina sobre la tubería, produciendo el desenrollado de la lámina de la bobina alrededor de la tubería mediante el desplazamiento del rodillo sobre dicha tubería. Adicionalmente al enrollado de la lámina alrededor de la tubería, se prevé una fase de inyección de resina al interior del rodillo, el cual a través de los orificios aplica la resina a la lámina para producir el recubrimiento de la superficie de la tubería y su posterior solidificación. Se prevé la realización de una fase de limpieza de la tubería previa a la reparación para el caso en el que dicha reparación lo requiera. Tras la fase de limpieza de la tubería se puede realizar una fase de aplicación de aire sobre la superficie de la tubería para conseguir una limpieza más completa de la tubería. Además tras la reparación de la tubería se calienta la cámara estanca y el segmento de tubería o se aplica aire frío o caliente, para facilitar la reacción química de la resina, la lámina y acelerar su solidificación. Una vez que se ha realizado la reparación de una zona dañada, se efectúa la separación de las porciones de carcasa, para permitir seguir inspeccionando la tubería, y repetir el proceso en una nueva zona dañada. Por tanto, mediante el aparato y método de la invención se permite realizar la inspección, limpieza y reparación de una tubería de forma automatizada y sin necesidad del empleo de buzos para el caso de las tuberías verticales. A continuación para facilitar una mejor comprensión de esta memoria descriptiva, y formando parte integrante de la misma, se acompañan una serie de figuras en las que con carácter ilustrativo y no limitativo se ha representado el objeto de la invención BREVE ENUNCIADO DE LAS FIGURAS Figura 1. Muestra una vista en perspectiva de la carcasa de la invención en la posición en la que las dos porciones que constituyen la carcasa se encuentran separadas para permitir su disposición alrede dor de una tubería. Figura 2. Muestra una vista en perspectiva del aparato de la figura anterior acoplado sobre una tubería para realizar su reparación. Las figuras 3 y 4. -Muestran un segmento de collarín en el que se incluyen los medios de deslizamiento del aparato sobre la tubería, los medios de frenado del aparato sobre la tubería en la posición de reparación, y los palpadores de detección del estado de la tubería. Figura 5. Muestra un detalle del interior de la caja estanca en el que se dispone un rodillo de una cinta de reparación de las tuberías, que mediante un pistón se introduce en el interior de la cámara estanca. Figura 6. Muestra un detalle de la disposición de la bobina en el interior de la cámara estanca sobre unos brazos previstos en los discos giratorios, cuyo desplazamiento angular realiza el enrollado de la cinta de la bobina alrededor de la tubería. Figura 7. Muestra una vista en perspectiva del detalle de la ubicación de la bobina en el interior de la cámara estanca. Figura 8. -Muestra una vista en sección transversal del aparato de la invención. Figura 9. Muestra una vista en perspectiva del detalle del mecanismo de elevación/descenso del rodillo que tiene una doble función: ubicarse sobre la superficie de la tubería discurriendo alrededor de la misma e impregnándola en una resina, y simultánea o adicionalmente, presionar sobre la lámina de la bobina para realizar el enrollamiento de la misma sobre la tubería. Las figuras 10 a 12. Muestran el detalle del funcionamiento del mecanismo de ele vación/descenso del rodillo. Figura 13. Muestra una vista esquemática de la posición elevada del rodillo. Figura 14. Muestra una vista en perspectiva del detalle del acoplamiento del ej e tubular del rodillo a un depósito de resina para la aplicación de dicha resina sobre la superficie de la tubería. Las figuras 15 y 16. Muestran el detalle del desacoplamiento/acoplamiento de los racores hembra sobre los racores macho para efectuar la conexión del eje tubular del rodillo con los depósitos de resina. DESCRIPCIÓN DE LA FORMA DE REALIZACIÓN PREFERIDA A continuación se realiza una descripción de la invención basada en las figuras anteriormente comentadas. El aparato de la invención comprende una carcasa 1 de configuración tubular que está constituida por dos porciones 2 que se unen entre sí mediante un elemento extensible 7 que permite efectuar la separación/aproximación de dichas porciones 2, y así permitir ubicar la carcasa 1 alrededor de una tubería 5. El elemento extensible es un gato neumático 7. Las porciones 2 se encuentran relacionadas entre sí mediante guías 8 que facilitan la separación/aproximación de dichas porciones 2 al actuar el gato neumático 7. Las porciones 2 se fijan a la tubería 5 mediante bridas extremas 3 que presentan un borde interior 4 que se 5 adapta a la configuración de la tubería 5 mediante una junta estanca (no representada) Sobre cada una de las bridas 3 se encuentra fijado un segmento de collarín 9 mediante un brazo articulado 10, que articula tanto en los segmentos de collarín 9, como sobre 10 las bridas extremas 3. Cada uno de los segmentos de collarín 9 está dotado de medios de unión entre dichos segmentos, que en ej emplo de realización están determinados por pletinas 11 mediante las cuales se efectúa la unión entre los dos segmentos de 15 collarín 9. Además los segmentos de collarín 9 están dotados de unos medios de frenado de la carcasa 1 sobre la tubería 5, cuya funcionalidad será descrita con posterioridad, y que están constituidos por cuñas 12 dispuestas sobre unas guías inclinadas 13 previstas en 2 O soportes 14 fij ados a la cara interna de los segmentos de collarín 9 de forma que las cuñas 12 pueden desplazarse a lo largo de las guías inclinadas 13. Además los soportes 14 son solidarios de unos pivotes guía 15 en los que se ubica un segmento de aro 16 que está unido a las cuñas 12 y a un 25 pistón inflable 17 que también está previsto en la cara interna de los segmentos de collarín 9, de forma que cuando se produce el inflado del pistón inflable 17, se produce la elevación de los segmentos de aro 16 guiados mediante los pivotes de guía, en cuyo desplazamiento arrastran a las 30 cuñas 12 deslizándose por las guías inclinadas 13, de forma que éstas se elevan y alejan de la tubería 5. En cambio al efectuarse el desinflado del pistón 17, se produce el descenso de los segmentos de aro 16 y de las cuñas 12 que presionan contra la tubería realizando el frenado de la misma cuando se proceda a efectuar su reparación. Además en la cara interior de los segmentos de collarín se prevén elementos de deslizamiento de la carcasa 1 sobre la tubería 5, elementos que están constituidos por rodillos 18 asistidos por un resorte 19 con precarga para presionar contra la tubería cuando los segmentos de collarín 9 se unen entre sí. Otro de los elementos previsto en la cara interior de los segmentos de collarín 9, lo constituyen unos palpadores 20 que permiten efectuar la inspección de la tubería. También se pueden disponer sensores de cualquier otro tipo de los conocidos convencionalmente, como por ej emplo sensores de ultrasonidos, e igualmente pueden ubicarse cámaras de visualización de la imagen de la tubería, pero en este último caso dichas cámaras de visualización se ubican en la cara interna de las porciones 2, las cuales no se han representado por resultar obvio para el experto medio en la materia. En base a la descripción realizada, se comprende fácilmente que una vez que las porciones de carcasa 2 se encuentran ubicadas, en su posición separada, alrededor de una tubería 5, se procede a realizar la unión de los segmentos de collarín 9 mediante sus pletinas 11, posición en la que los rodillos 18 presionan contra la tubería 5, tal y como fue indicado anteriormente. El ejemplo de realización de la invención se describe para la aplicación de la carcasa 1 sobre una tubería 5 vertical, de forma que en este caso la carcasa 1 se dispone alrededor de la tubería 5 vertical en la zona en la que sale del agua, por lo que la disposición de la carcasa 1 alrededor de la tubería 5 vertical, tal y como fue descrito anteriormente, se realiza de forma extremadamente sencilla sin necesidad de usar buzos. Cabe señalar que una de las porciones 2 de carcasa 1 está dotada de unas ruedas de transporte 21 que aparte de facilitar el transporte de la carcasa 1, también permiten realizar el apoyo de la misma sobre una superficie prevista en la zona en la que la tubería 5 vertical sale fuera del agua. Además las porciones 2 están dotadas de unos medios de fij ación de un cable de izado, que están determinados por enganches 22, en los que se fijan cables de un dispositivo de izado para realizar el deslizamiento de la carcasa 1 sobre la tubería 5. Así, una vez fijados los segmentos de collarín 9, y mediante el dispositivo de izado se permite descender a la carcasa 1 a lo largo de la tubería 5, de forma que mediante los palpadores 20 se inspecciona el estado de la misma, de forma que los rodillos 18 absorben las irregularidades de la tubería 5 por la acción de los resortes 19 durante el deslizamiento de la carcasa 1 sobre dicha tubería 5. De esta forma, se permite realizar la inspección de la tubería hasta que se detecta una zona que requiere su reparación, punto en el cual se posicionan las porciones 2, y a continuación se activa el gato neumático 7 realizándose la aproximación entre las porciones 2 de forma que el borde interior 4 de las bridas 3, se adapta a la configuración de la tubería 5 mediante una junta estanca 3a, definiendo la carcasa 1 un contorno que envuelve a la tubería 5 estableciendo una cámara estanca 6 entre la carcasa 1 y la tubería 5. Cabe señalar que los palpadores 20, y diferentes elementos que han de ser actuados, se encuentran conectados con un equipo de superficie que permite realizar las funciones comentadas. En el caso de que sean conexiones eléctricas, éstas pueden efectuarse de forma inalámbrica. Una posible conexión con la carcasa 1 con conducciones que discurren hasta la superficie, se representa mediante la referencia 23. Una vez formada la cámara estanca 6, se desinfla el pistón inflable 17, de forma que las cuñas 12 se desplazan sobre las guías inclinadas 13 enclavándose sobre la superficie de la tubería 5, de modo que se produce la fijación de la carcasa 1 sobre la tubería 5. A continuación se procede a vaciar la cámara estanca 6, del agua que contiene en su interior, mediante medios de inyección de aire en la cámara estanca 6 que producen el vaciado del agua a través de válvulas anti-retorno (no representadas) previstas en las porciones 2 de la carcasa 1. Estos medios por ej emplo pueden ser un compresor que puede estar ubicado fuera del agua y conectado con las porciones 2 en las que se prevén unas boquillas (no representadas) que insuflan el aire al interior de la cámara estanca 6, desplazando el agua a través de las válvulas anti-retorno. El compresor también puede estar dispuesto sobre una de las porciones 2, y ser actuado desde la superficie. En este punto cabe comentar que las porciones 2 están dotadas de unos pies centradores 58 asistidos por un resorte, que al realizar la aproximación de las porciones 2, apoyan y presionan sobre la superficie de la tubería 5, de forma que se facilita el centrado de las porciones 2 al ubicarlas sobre la tubería 5. Una vez que la cámara estanca 6 se encuentra vaciada de agua, en el caso en el que la tubería deba de ser limpiada, se prevé la incorporación de medios de limpieza que comprende un depósito de un producto abrasivo, y un compresor conectado con las boquillas previstas en las porciones 2 para proyectar el producto abrasivo de limpieza sobre la tubería y a continuación se activan unos medios de aspiración que succiona todos los residuos producidos en la limpieza, a través de unas boquillas. Los medios de aspiración, también pueden ser empleados como medios de vaciado del agua incluida en la cámara estanca 6. Una vez que la tubería se encuentra lista para ser reparada, la invención prevé que su reparación pueda ser efectuada mediante un rodillo 24, ubicado en el interior de 5 la cámara estanca 6, que mediante unos brazos 27 está fij ado sobre un ej e giratorio 25 asistido por un resorte 26, de forma que los extremos del eje giratorio 25 están fijados sobre dos discos giratorios 28 dispuestas paralelos a las bridas extremas 3, cuyo desplazamiento angular es 10 guiado mediante rodamientos 29 fijados en las bridas extremas 3. Para producir el desplazamiento angular de los discos giratorios 28, se prevé que éstos estén dotados de una corona dentada 31 que engrana con un motor que produce el desplazamiento angular de dichos discos giratorios 28. 15 Por la acción del resorte 26, se mantiene al rodillo 24 presionando sobre la superficie de la tubería 5, de forma que al accionar el motor el rodillo 24 gira alrededor de su eje y alrededor de la tubería 5. El eje del rodillo 24 presenta una configuración 2 O tubular y está conectado con depósitos de resina, y con unos orificios 30 practicados en la superficie del rodillo 24, de forma que al producirse el desplazamiento del rodillo 24 sobre la tubería 30, ésta se impregna de resina proporcionándole una capa de recubrimiento, a modo de 25 pintura, que puede determinar la reparación de dicha tubería, cuando los daños sufridos en la tubería no son elevados. El número de vueltas que el rodillo 24 da alrededor de la tubería 5, varía en función de las necesidades de la reparación a efectuar en la tubería 5. 30 El depósito de resina puede encontrarse en la superficie, o sobre la carcasa 1, de forma que en cualquiera de los casos se encuentra en una posición fija, por lo que para permitir que se produzca el giro del rodillo 24 sobre su ej e y alrededor de la tubería 30, se prevén medios de conexión del ej e tubular del rodillo 24 con los depósitos de resina, para lo que dicha conexión comprende un primer racor hembra 32 y un segundo racor hembra 33 que se encuentran fijados a los discos giratorios 28, de forma que dichos racores 32 y 33 giran junto con los discos giratorios 28, y además están conectados con el eje tubular del rodillo 24. En correspondencia con el primer racor hembra 32 se ha previsto un primer racor macho 35, y en correspondencia con el segundo racor hembra 33 se ha previsto un segundo racor macho 36. El primer y segundo racor macho 35 y 36 están dispuestos sobre un carril semicircular 37 de posición fija y previsto alrededor de la tubería 5, de forma que cada uno de dichos primer y segundo racor macho 35 y 36 están conectados con un depósito de resina mediante una conducción 39, Y a su vez están asistidos por un fleje que los mantiene en el extremo inicial del carril semicircular 37. Además, en el trayecto que realizan el primer y segundo racor hembra 32 y 33, se prevén unas levas 38, de forma que están previstas en correspondencia con el inicio y final de cada carril 37, para producir el desplazamiento de dichos racores hembra 36 y 37 venciendo la acción del resorte 34. En base a la descripción realizada, se comprende fácilmente que cuando el primer racor hembra 32 está acoplado al primer racor macho 35, el giro de los discos giratorios 28 produce el desplazamiento de los racores hembra 32 y 33, de forma que el primer racor hembra 32 arrastra al primer racor macho 35 sobre el carril 37 venciendo la acción del fleje, con lo que cuando llega al final del carril 37 la leva 38 que está dispuesta en la parte inicial del siguiente carril 37, produce la elevación del segundo racor hembra 33 venciendo la acción de su resorte 34, de forma que al dej ar de actuar la leva 38 sobre el segundo racor hembra 33, el resorte 34 produce su descenso, acoplándose sobre el segundo racor macho 36, que mediante la conducción 39 se encuentra unido a un depósito 5 de resina, de forma que la resina circula a través del segundo racor macho 36, del segundo racor hembra 34, hasta que llega hasta el eje tubular del rodillo 24. A continuación el primer racor hembra 32 contacta con la leva 38 situada al inicio del siguiente carril 37, produciendo 10 su elevación y su desconexión respecto del primer racor macho 35, de forma que así se permite mantener siempre la alimentación de la resina al interior del ej e tubular del rodillo 24. En los siguientes 180 0 de desplazamiento angular de los discos giratorios 28, es nuevamente el 15 primer racor macho 35 el que se acopla sobre el primer racor hembra 32 y a continuación se desconecta el segundo racor hembra 33 del segundo racor macho 36, repitiéndose el proceso por cada una de las vueltas que deba de dar el rodillo 24. 2 O En este punto cabe señalar, que el vaciado del agua del interior de la cámara estanca 6, también puede realizarse inyectando aire al ej e del rodillo 24 a través del mecanismo descrito para la inyección de resina al ej e tubular del rodillo 24, pero con la diferencia de que en 25 este caso en lugar de resina se aplica aire comprimido. En el caso en el que el daño sufrido por la tubería no pueda ser reparado mediante la aplicación de una capa de resina, la invención prevé otros medios de reparación que comprenden una caj a estanca 40 que comunica con la cámara 30 estanca 6 mediante una trampilla 41, y de forma que en el interior de la caja estanca 40 se han previsto unas guías telescópicas 42 asistidas por un pistón 43, para ubicar en el extremo inferior de las guías telescópicas 42 una bobina 44, que en el ejemplo de realización de la invención la bobina 44 está dispuesta sobre una soporte 45 que se ubica sobre las guías telescópicas 42. La bobina 44 tiene enrollada una lámina de reparación de tuberías de tipo convencional, de forma que dicha bobina 44 se dispone sobre las guías telescópicas 42 con un tramo de su extremo desenrollado y guiado sobre unos rodillos-guía 46, de modo que el tramo desenrollado se mantiene en posición vertical. Para permitir realizar la reparación mediante la lámina de la bobina 44, ha de realizarse el enrollado de la misma alrededor de la tubería 5, para lo que en el interior de la cámara estanca 6 se prevén sendos brazos 47 cada uno de ellos fij ados sobre los discos giratorios 28, de forma que al actuarse el pistón 43, se produce el desplazamiento de las guías telescópicas 42 que realizan la apertura de la trampilla 41, con lo que la bobina 44 desciende al interior de la cámara estanca 6, hasta que unos pivotes extremos 48 previstos sobre el soporte 45 de la bobina, se introducen en un alojamiento 49 previsto en el extremo de los brazos 47, que mediante un prisionero de bola 50 se produce la entrada de la bola en una muesca practicada en los pivotes extremos 48, fijándose de esta forma la bobina 44 sobre los brazos 47, y todo de forma que el extremo de la lámina del rodillo quede ubicada sobre la superficie de la tubería 5. Además el rodillo 24 se encuentra ubicado en una posición en la que al efectuarse el desplazamiento de los discos giratorios 28, y por tanto el desplazamiento del rodillo 24 y bobina 44, dicho rodillo 24 presiona sobre el extremo de la lámina, realizando su desenrollado, y simultáneamente su enrollado alrededor de la tubería 5. En este caso a la vez que se realiza el enrollado de la lámina alrededor de la tubería 5, también se puede aplicar resina a través de los orificios 30 del rodillo 24 para conseguir un mayor efecto reparador de la tubería 5. Una vez aplicada la resina, bien independientemente o junto con la lámina, según las dos realizaciones descritas, se prevé que el rodillo 24 esté dotado de un mecanismo de elevación/descenso que se complementa con la incorporación de una palanca 51 solidaria del eje giratorio 25 sobre el que se soporta el rodillo 24 mediante los brazos 27 ya descritos, de modo que en el trayecto que realiza la palanca 51, se ha previsto una leva de posición desplazable 52, cuya posición es regulable mediante un pistón 53, de forma que cuando dicha leva desplazable 52 se posiciona en correspondencia con la palanca 51, al contactar con la leva desplazable 52, se produce el desplazamiento angular del eje giratorio 25 venciendo la acción del resorte 26, lo que produce la elevación del rodillo 24, de forma que mediante un pasador 54 se produce el enclavamiento del eje giratorio 25 en la posición en la que el rodillo 24 se encuentra elevado, tal y como se demuestra esquemáticamente en la figura 12. De esta forma, se evita que el rodillo pueda pegarse sobre la superficie de la tubería, una vez que se ha aplicado la resina y se produzca el secado de la misma. Para realizar nuevamente el descenso del rodillo 24 en su posición sobre la tubería 5, se prevé la incorporación de una cuña 55 dispuesta en el trayecto de un elemento desplazable 56 que es solidario del pasador 54, de forma que cuando la cuña 55 contacta con el elemento desplazable 56, venciendo la acción de un resorte 57, que lo asiste, produce el desplazamiento del pasado 54 y el desenclavamiento del eje giratorio 25, que por la acción del resorte 26, desciende hasta presionar con la superficie de la tubería 5, para realizarse una nueva reparación. Para favorecer la reacción química de la resina, y acelerar su secado, se prevé la incorporación de medios de secado que están constituidos por una resistencia de calentamiento de la cámara estanca 6 y del segmento de tubería en el que está instalada la carcasa, para facilitar la reacción química y solidificación de la resina aplicada. Cabe señalar que en el caso en el que la reparación de una tubería requiera el relleno de cavidades detectadas en su superficie, se prevé que la carcasa comprenda un elemento de disparado mediante aire comprimido de bolas de resina para relleno de dichas cavidades detectadas en la superficie de la tubería. Una vez realizada la reparación de la tubería, se procede nuevamente a separar las porciones 2 actuando el elemento extensible 7, permitiéndose continuar el deslizamiento de la carcasa sobre la tubería 5, hasta encontrar una nueva zona dañada, procediéndose a realizar su reparación de la forma ya comentada. Seguidamente se enumeran las diferentes referencias utilizadas en los ej emplos de realización, para facilitar el seguimiento de su explicación: 1. Carcasa 2. Porciones (de carcasa) 3. Bridas extremas 3a. Junta estanca 4. Borde inferior (de bridas extremas) 5. Tubería 6. Cámara estanca 7. Elemento extensible 8. Guías 9. Segmentos de collarín 10. Brazo articulado 11. Pletinas 12. Cuña 13. Guía inclinada 14. Soporte 15. Pivotes guía 16. Segmentos de aro 17. Pistón inflable 18. Rodillos 19. Resorte 20. Palpadores 21. Ruedas de transporte 22. Enganches 23. Conexiones con superficie 24. Rodillo 25. Eje giratorio 26. Resorte 27. Brazos 28. Discos giratorios 29. Rodamientos 30. Orificios 31. Corona dentada 32. Primer racor hembra 33. Segundo racor hembra 34. Resorte 35. Primer racor macho 36. Segundo racor macho 37. Carril 38. Levas 39. Conexión de 35 y 36 con depósito resina 40. Caja estanca 41. Trampilla 42. Guías telescópicas 43. Pistón 44. Bobina 45. Soporte de bobina 46. Rodillos-guía 47. Brazos 48. Pivotes extremos 49. Alojamiento 50. Prisionero de bola . Palanca 52. Leva de posición desplazable 53. Pistón 54. Pasador 55. Cuña 56. Elemento desplazable 57. Resorte 58. Pies de centrado Una vez formada la cámara estanca 6, se desinfla el pistón inflable 17, de forma que las cuñas 12 se desplazan sobre las guías inclinadas 13 enclavándose sobre la superficie de la tubería S, de modo que se produce la fijación de la carcasa 1 sobre la tubería S. A continuación se procede a vaciar la cámara estanca 6, del agua que contiene en su interior, mediante medios de inyección de aire en la cámara estanca 6 que producen el vaciado del agua a través de válvulas anti-retorno (no representadas) previstas en las porciones 2 de la carcasa 1. Estos medios por ejemplo pueden ser un compresor que puede estar ubicado fuera del agua y conectado con las porciones 2 en las que se prevén unas boquillas (no representadas) que insuflan el aire al interior de la cámara estanca 6, desplazando el agua a través de las válvulas anti-retorno. El compresor también puede estar dispuesto sobre una de las porciones 2, y ser actuado desde la superficie. En este punto cabe comentar que las porciones 2 están dotadas de unos pies centradores asistidos por un resorte, que al realizar la aproximación de las porciones 2, apoyan y presionan sobre la superficie de la tubería 5, de forma que se facilita el centrado de las porciones 2 al ubic~rlas sobre la tubería S. Una vez que la cámara estanca 6 se encuentra vaciada de agua, en el caso en el que la tubería deba de ser limpiada, se prevé la incorporación de medios de limpieza que comprende un depósito de un producto abrasivo, y un compresor conectado con las boquillas previstas en las porciones 2 para proyectar el producto abrasivo de limpieza sobre la tubería y a continuación se activan unos medios de aspiración que succiona todos los residuos producidos en la limpieza, a través de unas boquillas. Los medios de aspiración, también pueden ser empleados como medios de vaciado del agua incluida en la cámara 54. Pasador 55. Cuña 56. Elemento desplazable 57. Resorte
+ ES-2387656_B1 APARATO Y MÉTODO DE REPARACIÓN DE TUBERÍAS SUBMARINAS OBJETO DE LA INVENCIÓN La presente invención, tal y como se expresa en el enunciado de esta memoria descriptiva, se refiere a un aparato y a un método que permiten efectuar la reparación de tuberías submarinas, como por ejemplo puede ser reparar fugas, zonas dañadas por corrosión, etc.; y que tiene por objeto dotar al aparato de medios de deslizamientos sobre la tubería que permiten desplazar el aparato a lo largo de la tubería hasta la zona a reparar. Es otro objeto de la invención el permitir realizar la inspección de la tubería mediante el deslizamiento del aparato sobre la misma, hasta que se detecte una zona en la que la tubería se encuentra dañada, permitiendo realizar a continuación la reparación de dicha zona dañada, de acuerdo con el aparato y método de la invención. También es objeto de la invención el permitir efectuar la reparación de la tubería, mediante la aplicación de una capa de resina sobre la misma, a modo de pintado, y/o mediante la aplicación de una lámina reparadora alrededor de la tubería. La invención permite realizar la limpieza de la tubería previamente a su reparación. Por tanto la invención permite inspeccionar, limpiar, y/o reparar la tubería. La invención es aplicable en cualquier tipo de tubería submarina, como por ejemplo pueden ser tubería horizontales, verticales o codos, de forma que en el caso de aplicarse a tuberías verticales, permite ubicar el aparato sobre la tubería una zona fuera del agua, y deslizar el aparato a lo largo de la tubería mediante un dispositivo de izado hasta detectar una zona dañada, lo que permite efectuar su posterior limpieza y/o reparación. En el caso en el que se aplique a una tubería horizontal el deslizamiento se puede efectuar de forma manual o mediante un robot o mediante cualquier otro dispositivo que permita desplazar al aparato sobre la tubería. ANTECEDENTES DE LA INVENCIÓN El antecedente más próximo a la invención lo constituye la patente española con número de solicitud 2 O O 1 O 3 11 5 O , en 1 a que se enseña el uso de una carcasa de configuración tubular que está dotada de dos porciones que se unen entre sí y fij an a una tubería mediante bridas extremas que presentan un borde interior que se adapta a la configuración de dicha tubería mediante una junta estanca, siendo la carcasa de contorno que envuelve a la tubería, de forma que se establece una cámara estanca entre la carcasa y la tubería. Además comprende medios de vaciado del agua de dicha cámara estanca, mediante la inyección de aire que evacua el agua a través de válvulas anti-retorno previstas en la carcasa, de forma que una vez vaciada de agua la cámara estanca, se realiza la reparación de la tubería mediante la aplicación de una lámina convencional, de reparación de tuberías, alrededor de la zona dañada. La lámina se adquiere enrollada en bobinas, de forma que para efectuar la reparación de la tubería el dispositivo comprende un cargador estanco de bobinas mediante el cual se introduce la bobina en la cámara estanca sobre unos discos giratorios, y todo ello de forma que el extremo de la lámina se encuentra desenrollado y se posiciona sobre la superficie de la tubería. Además comprende un rodillo que queda ubicado en correspondencia con el extremo de la lámina situada sobre la superficie de la tubería, de modo que dicha bobina también se encuentra ubicada sobre los discos giratorios, con lo que al producir su giro se produce el desplazamiento angular de la bobina y del rodillo alrededor de la tubería a reparar, envolviendo la lámina la zona dañada, realizándose de este modo su reparación. En el documento de patente citado, se requiere realizar el montaje de las porciones de carcasa en la zona dañada de forma manual por buzos, y no se permite deslizar el dispositivo sobre la tubería, para deslizarla a lo largo de la misma y efectuar su inspección, de forma que cuando se detecte una zona dañada se acoplen automáticamente las porciones de carcasa sobre la superficie de la tubería en la zona a reparar, realizándose posteriormente la reparación. La invención permite deslizar el aparato sobre la tubería, de modo que puede realizar la inspección, limpieza y/o reparación de la misma de forma automática, eliminando la necesidad del montaje manual mediante buzos. DESCRIPCIÓN DE LA INVENCIÓN Para conseguir los objetivos y resolver los inconvenientes anteriormente indicados, la invención proporciona un nuevo aparato y método de reparación de tuberías submarinas. El aparato de la invención, al igual que el dispositivo del documento citado en el estado de la técnica, comprende una carcasa de configuración tubular que está dotada de dos porciones que se unen entre sí y fijan a una tubería mediante bridas extremas que presentan un borde inferior que se adapta a la configuración de dicha tubería mediante una junta estanca, todo ello de manera que la carcasa presenta un contorno que envuelve a la tubería, estableciendo una cámara estanca entre la carcasa y la tubería, de forma que dicha cámara estanca se vacía del agua que en ella queda alojada tras montar la carcasa sobre la tubería. Este vaciado se realiza mediante medios de vaciado de agua, lo que permite realizar la reparación posterior de la tubería de acuerdo con los medios que el aparato de invención prevé, y que serán descritos con posterioridad. La principal novedad de la invención reside en que además de los elementos anteriormente descritos, comprende al menos un elemento extensible fijado a las dos porciones de la carcasa, de modo que dicho elemento extensible permite efectuar la separación/aproximación de las dos porciones. Además el aparato comprende al menos dos segmentos de collarín complementarios, cada uno de ellos unido articuladamente a al menos uno de los extremos de una de las porciones de carcasa, comprendiendo, a su vez, los 5 segmentos de collarín medios de unión entre segmentos y elementos de deslizamiento sobre la tubería. El al menos elemento extensible está configurado de manera tal que al realizarse la separación de las porciones, se permite su ubicación alrededor de la tubería 10 y al aproximarlas se acoplan sobre la tubería formando la cámara estanca. Además dichos segmentos de collarín están configurados de manera tal que una vez dispuestas las porciones de carcasa separadas alrededor de la tubería, al fij ar los segmentos de collarín entre sí, los medios de 15 deslizamiento apoyan sobre la tubería permitiendo realizar el deslizamiento guiado de la carcasa sobre dicha tubería hasta una zona a reparar. En la realización preferente de la invención los elementos de deslizamiento sobre la tubería comprenden 2 O rodillos que están asistidos por un resorte con precarga para presionar contra la tubería. Esta configuración permite que al realizar el deslizamiento del aparato sobre la tubería, los resortes absorban las irregularidades que dicha tubería pueda presentar. 25 Además en la realización preferente de la invención se prevé que los segmentos de collarín estén dotados de medios de frenado de la carcasa sobre la tubería para impedir su desplazamiento durante una reparación, lo cual es especialmente útil cuando el aparato de la invención se 30 aplica sobre tuberías verticales, ya que en éstas una vez que se ha efectuado el vaciado del agua del interior de la cámara estanca, la carcasa tiende a flotar y por tanto, ascender a lo largo de la tubería, lo cual se impide con dichos medios de frenado, los cuales comprenden cuñas que 35 están dispuestas sobre guías inclinadas previstas en soportes que están fijados en la cara interna de los segmentos de collarín, de forma que dichas guías permiten efectuar el desplazamiento guiado simultaneo de las cuñas en sentido axial y radial respecto de la tubería. Además los soportes están dotados de pivotes-guía en los que se dispone un segmento de aro por cada segmento de collarín, de forma que cada segmento de aro queda dispuesto perpendicularmente a la cara interior del collarín, unidos a las cuñas y a un pistón inflable, al tiempo que se encuentran asistidos por resortes, de forma que esta configuración permite que al inflar el pistón inflable se provoque el desplazamiento transversal de los segmentos de aro sobre los segmentos de collarín venciendo la acción del resorte, lo que provoca simultáneamente el desplazamiento radial y longitudinal de las cuñas hacia el exterior de la tubería separándose de la misma, y de manera que al desinflar el pistón, se produce el movimiento inverso, presionando las cuñas sobre la superficie de la tubería, anclándose el aparato en la posición sobre la tubería en la que se ha efectuado el desinflado del pistón. Para facilitar la separación/aproximación de las porciones de la carcasa, se prevé que las dos porciones se encuentren relacionadas entre sí mediante guías del desplazamiento de separación/aproximación de dichas porciones. Dicho elemento extensible, está constituido por un gato neumático, cuyos extremos están fijados a cada una de las porciones, de forma que la extensión del gato neumático produce la separación entre las porciones de la carcasa, y su acortamiento, produce el acoplamiento de las dos porciones de carcasa sobre la tubería en la zona a reparar. Para permitir efectuar la inspección de la tubería, se prevé que el aparato incorpore sensores de detección de dicho estado de la tubería, como pueden ser palpadores, sensores de ultrasonidos y cámaras de captación de imagen, que pueden ubicarse en cualquier lugar del aparato de la invención, como por ejemplo, en el caso de los palpadores y sensores de ultrasonidos, estos pueden estar previstos sobre los segmentos de collarín, y para el caso de las cámaras de captación de imagen, se pueden disponer en la cara interior de las porciones de carcasa. Respecto a los medios de reparación de la tubería, en una realización de la invención, comprenden dos discos giratorios dispuestos paralelos a las bridas extremas y que están relacionados con una corona dentada cuyo giro provoca el desplazamiento angular de los discos giratorios alrededor de la tubería, para lo que se prevé un motor que engrana con la corona dentada para producir el desplazamiento angular de los discos giratorios alrededor de dicha tubería. Además los medios de reparación de tuberías están dotados de un rodillo cuyo ej e presenta una configuración tubular que comunica con orificios previstos en la superficie del rodillo, y todo ello de forma que dicho rodillo puede girar sobre su ej e y estar dispuesto sobre los discos giratorios mediante un mecanismo de elevación/descenso para permitir ubicar el rodillo sobre la superficie de la tubería presionando sobre la misma; contando con al menos una conexión del eje tubular del rodillo con un depósito de resina, de modo que al girar el rodillo sobre la superficie de la tubería mediante la actuación del motor, se aplica la resina sobre dicha superficie de la tubería a través de los orificios de la bobina, estableciendo un recubrimiento de resina que determina la reparación de la tubería. Obviamente el rodillo puede dar un número de vueltas variable en función de la reparación a realizar para proporcionar un recubrimiento de un cierto espesor que permita realizar la referida reparación. En la realización preferente de la invención el mecanismo de elevación/descenso del rodillo comprende un ej e giratorio asistido por un resorte, que está fij ado en los discos giratorios y del que son solidarios dos brazos, en cuyos extremos está fijado el eje del rodillo. Además el eje giratorio es solidario de una palanca accionable mediante una leva de posición desplazable, mediante un pistón, sobre los discos giratorios, de manera que al posicionar la leva en el trayecto de la palanca se produce el desplazamiento angular del eje giratorio, venciendo la acción del resorte, lo que determina la elevación del rodillo. Al producirse la elevación del rodillo, se produce el enclavamiento del eje giratorio en esta posición, mediante un pasador que se enclava en dicho eje giratorio que mantiene al rodillo en la posición elevada hasta que una cuña dispuesta en los discos giratorios actúa sobre el pasador de enclavamiento produciendo su desenclava miento y el descenso del rodillo por la acción del resorte, ubicándose el rodillo en la posición en la que contacta y presiona contra la tubería. La elevación del rodillo evita que se pueda pegar sobre la superficie de la tubería al secarse la resina. Respecto a la al menos conexión del ej e tubular del rodillo con un depósito de resina, ésta comprende un primer y un segundo racor hembra contiguos y asistidos por un resorte que están fijados en uno de los discos giratorios y que mediante una conducción están conectados con el ej e tubular del rodillo. Dicha conexión del ej e tubular del rodillo con un depósito de resina, también un comprende un primer y un segundo racor macho, cada uno de ellos dispuesto en un carril semicircular de posición fija en las porciones de carcasa. Estos carriles están previstos alrededor de la tubería y conectados, cada uno de ellos, con un depósito de resina. Los racores macho están asistidos por un fleje que los mantiene en el extremo inicial del carril. Además dichos medios de conexión del eje tubular del rodillo con un depósito de resina incluyen dos levas que están previstas en correspondencia con el inicio y final de cada carril y ubicadas en el trayecto de los racores hembra, para producir el desplazamiento de dichos racores hembra venciendo la acción del resorte al contactar con las levas. En base a la configuración descrita se comprende que estando el primer racor hembra acoplado al primer racor macho, el giro de los discos giratorios produce el desplazamiento de los racores hembra arrastrando el primer racor hembra al primer racor macho venciendo la acción del fleje, de forma que al llegar al final del carril, la leva inicial del otro carril eleva el segundo racor hembra y produce su acoplamiento en el segundo racor macho dispuesto en el inicio del carril, y seguidamente el primer conector hembra contacta con la leva prevista en el final del carril produciendo la elevación del primer racor hembra venciendo la acción de su resorte y desconectándolo del primer racor macho, de forma que dicho primer racor macho vuelve a su posición inicial por la acción del flej e. El proceso se repite con cada media vuelta de los discos giratorios. En otra realización de la invención los medios de reparación de la tubería comprenden una caj a estanca que está dispuesta longitudinalmente en una de las porciones de la carcasa, de forma que dicha caja estanca está dotada de una trampilla que comunica con la cámara estanca, comprendiendo además guías telescópicas en las que está dispuesta una bobina en la que está enrollada una lámina de reparación de tuberías. La bobina comprende sendos pivotes extremos, de forma que la bobina se dispone con un tramo extremo de la lámina desenrollado y guiado mediante rodillos-guía que mantienen el tramo desenrollado de la lámina en posición vertical. Además la caj a estanca está dotada de un pistón de desplazamiento de dichas guías telescópicas, para desplazarlas a una posición en la que la bobina se posiciona fija en un brazo previsto en cada uno de los dos discos giratorios, para lo que dichos brazos están dotados de un alojamiento de ubicación y fijación de los pivotes incluidos en el rodillo. En base a la descripción realizada, se comprende fácilmente que al ser actuado el pistón se desplazan las guías telescópicas abriendo la trampilla y aloj ándose los pivotes de la bobina en los alojamientos de los soportes, de forma que el extremo desenrollado de la lámina queda ubicado sobre la superficie de la tubería. Además los brazos en los que se retiene la bobina, están ubicados en correspondencia con el rodillo, de manera que al posicionar el extremo de la lámina de la bobina sobre la superficie de la tubería, y al realizar el giro de los discos giratorios, el rodillo se dispone sobre el extremo de la lámina, presionándola contra la superficie de la tubería, y permitiendo así realizar el enrollamiento de la lámina alrededor de la tubería cuando se produce el desplazamiento angular de los discos giratorios. En una realización de la invención se prevé que el aparato de la invención esté dotado de medios de limpieza de la tubería, que comprenden un depósito de un producto abrasivo, un compresor conectado con unas boquillas previstas en las porciones de carcasa, de forma que al activarse el compresor se proyecta el producto abrasivo de limpieza sobre la tubería, realizándose de esta forma la limpieza de la tubería en la zona a reparar; limpieza que se complementa mediante la incorporación de medios de aspiración de los residuos producidos en la limpieza a través de unas boquillas previstas en las porciones de carcasa. Respecto a los medios de vaciado del agua de la cámara estanca, que fueron comentados anteriormente, en una realización de la invención se prevé que éstos estén constituidos por medios de inyección de aire en la cámara estanca que producen el vaciado del agua a través de válvulas anti-retorno previstas en las porciones de carcasa. Los medios de inyección de aire comprenden un compresor de aire que se aplica selectivamente sobre inyectores dispuestos en la carcasa, o sobre una conducción que está conectada al ej e tubular de la bobina, de forma que el aire se aplica al interior de la cámara estanca a través de los orificios previstos en dicha bobina, que fueron descritos anteriormente. Cabe comentar que las boquillas y compresores, pueden ser compartidos, tanto por los medios de vaciado del agua de la cámara estanca, como por los medios de limpieza o los medios de aspiración. En una realización de la invención la carcasa incluye resistencias de calentamiento de la cámara estanca y del segmento de tubería en la que está instalado el aparato, para facilitar la reacción química y solidificación de la resina aplicada, en el caso en el que únicamente la reparación se realiza mediante resina, y también permite facilitar la reacción química y solidificación de la lámina de la bobina sobre la tubería, cuando en la reparación se utiliza una lámina, tal y como ya fue descrito. Para facilitar el acoplamiento de las porciones de carcasa sobre la tubería, se prevé que dichas porciones de carcasa comprendan unos pies centradores asistidos por un resorte, para al aproximar las porciones sobre la tubería, los pies centradores apoyan sobre la tubería y realizan el centrado sobre ésta de dichas porciones. Para el caso en el que las tuberías presenten daños de considerable espesor, se prevé que el aparato de la invención comprenda un elemento de disparo, mediante aire comprimido, de bolas de un compuesto químico para el relleno de las cavidades detectadas en la superficie de la tubería, de forma que a continuación se permita efectuar la reparación de la misma tal y como ya fue descrito. Según fue comentado con anterioridad, la invención es aplicable tanto en tuberías submarinas horizontales como verticales, resultando su aplicación más ventaj osa en las tuberías verticales, para lo que en este caso el aparato está dotado de medios de fij ación de un cable de izado de las porciones de carcasa, para disponerlas alrededor de una tubería vertical fuera o dentro del agua, de manera que una fij ados los segmentos de collarín, se permite actuando los medios de izado, y descender por deslizamiento las porciones de carcasa a lo largo de la tubería, e inspeccionar la misma, hasta detectar una zona dañada, realizándose la reparación tal y como ya fue comentado. El aparato de la invención también comprende un sensor de profundidad, para establecer la profundidad a la que se encuentran las diferentes zonas dañadas en la tubería. Además la invención se refiere a un método de reparación de tuberías, mediante el aparato descrito, que comprende una fase en la que se actúa el elemento extensible que está fij ado a las porciones que forman la carcasa del aparato, para separarlas y permitir ubicarlas alrededor de una tubería vertical en la zona en la que está fuera del agua, lo que a continuación permite unir los segmentos de collarín complementarios alrededor de la tubería, en donde los segmentos de collarín articulan en al menos uno de los extremos de las porciones, para ubicar los medios de deslizamiento previstos en los segmentos de collarín presionando sobre la tubería, lo que permite realizar deslizar a lo largo de la tubería el aparato actuando el dispositivo de izado, y detectar el estado de la tubería mediante los sensores previstos en dicho aparato, de forma que una vez que se detecte una zona dañada, se detiene el deslizamiento del aparato sobre la tubería, y se acoplan las porciones sobre la superficie de tubería en la zona a reparar, mediante la actuación del elemento extensible, formando la cámara estanca, de forma que a continuación se bloquea la posición de la carcasa mediante la actuación de los medios de frenado, y se vacía el agua del interior de la cámara estanca, para a continuación efectuarse la limpieza de la tubería, si así fuera necesario y su posterior reparación. En una realización de la invención la reparación de la tubería comprende aplicar una resina a un eje tubular de un rodillo, dispuesto en la cámara estanca presionando sobre la superficie de la tubería, y aplicar la resina a la superficie de la tubería a través de orificios previstos en la superficie del rodillo al realizar su giro alrededor de su eje y de la tubería. En otra realización de la invención la reparación se realiza mediante la introducción, de forma estanca en la cámara estanca, de una bobina en una posición paralela a la tubería, con el extremo de la lámina desenrollado un tramo que determina que la lámina se ubique sobre la tubería, de forma que a continuación se actúa el rodillo para que quede ubicado sobre la superficie de la tubería presionando contra la misma, y a continuación al efectuarse el giro de los discos giratorios, y por tanto del rodillo alrededor de la tubería y de su ej e, presiona sobre el extremo de la lámina de la bobina sobre la tubería, produciendo el desenrollado de la lámina de la bobina alrededor de la tubería mediante el desplazamiento del rodillo sobre dicha tubería. Adicionalmente al enrollado de la lámina alrededor de la tubería, se prevé una fase de inyección de resina al interior del rodillo, el cual a través de los orificios aplica la resina a la lámina para producir el recubrimiento de la superficie de la tubería y su posterior solidificación. Se prevé la realización de una fase de limpieza de la tubería previa a la reparación para el caso en el que dicha reparación lo requiera. Tras la fase de limpieza de la tubería se puede realizar una fase de aplicación de aire sobre la superficie de la tubería para conseguir una limpieza más completa de la tubería. Además tras la reparación de la tubería se calienta la cámara estanca y el segmento de tubería o se aplica aire frío o caliente, para facilitar la reacción química de la resina, la lámina y acelerar su solidificación. Una vez que se ha realizado la reparación de una zona dañada, se efectúa la separación de las porciones de carcasa, para permitir seguir inspeccionando la tubería, y repetir el proceso en una nueva zona dañada. Por tanto, mediante el aparato y método de la invención se permite realizar la inspección, limpieza y reparación de una tubería de forma automatizada y sin necesidad del empleo de buzos para el caso de las tuberías verticales. A continuación para facilitar una mejor comprensión de esta memoria descriptiva, y formando parte integrante de la misma, se acompañan una serie de figuras en las que con carácter ilustrativo y no limitativo se ha representado el objeto de la invención BREVE ENUNCIADO DE LAS FIGURAS Figura 1. Muestra una vista en perspectiva de la carcasa de la invención en la posición en la que las dos porciones que constituyen la carcasa se encuentran separadas para permitir su disposición alrede dor de una tubería. Figura 2. Muestra una vista en perspectiva del aparato de la figura anterior acoplado sobre una tubería para realizar su reparación. Las figuras 3 y 4. -Muestran un segmento de collarín en el que se incluyen los medios de deslizamiento del aparato sobre la tubería, los medios de frenado del aparato sobre la tubería en la posición de reparación, y los palpadores de detección del estado de la tubería. Figura 5. Muestra un detalle del interior de la caja estanca en el que se dispone un rodillo de una cinta de reparación de las tuberías, que mediante un pistón se introduce en el interior de la cámara estanca. Figura 6. Muestra un detalle de la disposición de la bobina en el interior de la cámara estanca sobre unos brazos previstos en los discos giratorios, cuyo desplazamiento angular realiza el enrollado de la cinta de la bobina alrededor de la tubería. Figura 7. Muestra una vista en perspectiva del detalle de la ubicación de la bobina en el interior de la cámara estanca. Figura 8. -Muestra una vista en sección transversal del aparato de la invención. Figura 9. Muestra una vista en perspectiva del detalle del mecanismo de elevación/descenso del rodillo que tiene una doble función: ubicarse sobre la superficie de la tubería discurriendo alrededor de la misma e impregnándola en una resina, y simultánea o adicionalmente, presionar sobre la lámina de la bobina para realizar el enrollamiento de la misma sobre la tubería. Las figuras 10 a 12. Muestran el detalle del funcionamiento del mecanismo de ele vación/descenso del rodillo. Figura 13. Muestra una vista esquemática de la posición elevada del rodillo. Figura 14. Muestra una vista en perspectiva del detalle del acoplamiento del ej e tubular del rodillo a un depósito de resina para la aplicación de dicha resina sobre la superficie de la tubería. Las figuras 15 y 16. Muestran el detalle del desacoplamiento/acoplamiento de los racores hembra sobre los racores macho para efectuar la conexión del eje tubular del rodillo con los depósitos de resina. DESCRIPCIÓN DE LA FORMA DE REALIZACIÓN PREFERIDA A continuación se realiza una descripción de la invención basada en las figuras anteriormente comentadas. El aparato de la invención comprende una carcasa 1 de configuración tubular que está constituida por dos porciones 2 que se unen entre sí mediante un elemento extensible 7 que permite efectuar la separación/aproximación de dichas porciones 2, y así permitir ubicar la carcasa 1 alrededor de una tubería 5. El elemento extensible es un gato neumático 7. Las porciones 2 se encuentran relacionadas entre sí mediante guías 8 que facilitan la separación/aproximación de dichas porciones 2 al actuar el gato neumático 7. Las porciones 2 se fijan a la tubería 5 mediante bridas extremas 3 que presentan un borde interior 4 que se 5 adapta a la configuración de la tubería 5 mediante una junta estanca (no representada) Sobre cada una de las bridas 3 se encuentra fijado un segmento de collarín 9 mediante un brazo articulado 10, que articula tanto en los segmentos de collarín 9, como sobre 10 las bridas extremas 3. Cada uno de los segmentos de collarín 9 está dotado de medios de unión entre dichos segmentos, que en ej emplo de realización están determinados por pletinas 11 mediante las cuales se efectúa la unión entre los dos segmentos de 15 collarín 9. Además los segmentos de collarín 9 están dotados de unos medios de frenado de la carcasa 1 sobre la tubería 5, cuya funcionalidad será descrita con posterioridad, y que están constituidos por cuñas 12 dispuestas sobre unas guías inclinadas 13 previstas en 2 O soportes 14 fij ados a la cara interna de los segmentos de collarín 9 de forma que las cuñas 12 pueden desplazarse a lo largo de las guías inclinadas 13. Además los soportes 14 son solidarios de unos pivotes guía 15 en los que se ubica un segmento de aro 16 que está unido a las cuñas 12 y a un 25 pistón inflable 17 que también está previsto en la cara interna de los segmentos de collarín 9, de forma que cuando se produce el inflado del pistón inflable 17, se produce la elevación de los segmentos de aro 16 guiados mediante los pivotes de guía, en cuyo desplazamiento arrastran a las 30 cuñas 12 deslizándose por las guías inclinadas 13, de forma que éstas se elevan y alejan de la tubería 5. En cambio al efectuarse el desinflado del pistón 17, se produce el descenso de los segmentos de aro 16 y de las cuñas 12 que presionan contra la tubería realizando el frenado de la misma cuando se proceda a efectuar su reparación. Además en la cara interior de los segmentos de collarín se prevén elementos de deslizamiento de la carcasa 1 sobre la tubería 5, elementos que están constituidos por rodillos 18 asistidos por un resorte 19 con precarga para presionar contra la tubería cuando los segmentos de collarín 9 se unen entre sí. Otro de los elementos previsto en la cara interior de los segmentos de collarín 9, lo constituyen unos palpadores 20 que permiten efectuar la inspección de la tubería. También se pueden disponer sensores de cualquier otro tipo de los conocidos convencionalmente, como por ej emplo sensores de ultrasonidos, e igualmente pueden ubicarse cámaras de visualización de la imagen de la tubería, pero en este último caso dichas cámaras de visualización se ubican en la cara interna de las porciones 2, las cuales no se han representado por resultar obvio para el experto medio en la materia. En base a la descripción realizada, se comprende fácilmente que una vez que las porciones de carcasa 2 se encuentran ubicadas, en su posición separada, alrededor de una tubería 5, se procede a realizar la unión de los segmentos de collarín 9 mediante sus pletinas 11, posición en la que los rodillos 18 presionan contra la tubería 5, tal y como fue indicado anteriormente. El ejemplo de realización de la invención se describe para la aplicación de la carcasa 1 sobre una tubería 5 vertical, de forma que en este caso la carcasa 1 se dispone alrededor de la tubería 5 vertical en la zona en la que sale del agua, por lo que la disposición de la carcasa 1 alrededor de la tubería 5 vertical, tal y como fue descrito anteriormente, se realiza de forma extremadamente sencilla sin necesidad de usar buzos. Cabe señalar que una de las porciones 2 de carcasa 1 está dotada de unas ruedas de transporte 21 que aparte de facilitar el transporte de la carcasa 1, también permiten realizar el apoyo de la misma sobre una superficie prevista en la zona en la que la tubería 5 vertical sale fuera del agua. Además las porciones 2 están dotadas de unos medios de fij ación de un cable de izado, que están determinados por enganches 22, en los que se fijan cables de un dispositivo de izado para realizar el deslizamiento de la carcasa 1 sobre la tubería 5. Así, una vez fijados los segmentos de collarín 9, y mediante el dispositivo de izado se permite descender a la carcasa 1 a lo largo de la tubería 5, de forma que mediante los palpadores 20 se inspecciona el estado de la misma, de forma que los rodillos 18 absorben las irregularidades de la tubería 5 por la acción de los resortes 19 durante el deslizamiento de la carcasa 1 sobre dicha tubería 5. De esta forma, se permite realizar la inspección de la tubería hasta que se detecta una zona que requiere su reparación, punto en el cual se posicionan las porciones 2, y a continuación se activa el gato neumático 7 realizándose la aproximación entre las porciones 2 de forma que el borde interior 4 de las bridas 3, se adapta a la configuración de la tubería 5 mediante una junta estanca 3a, definiendo la carcasa 1 un contorno que envuelve a la tubería 5 estableciendo una cámara estanca 6 entre la carcasa 1 y la tubería 5. Cabe señalar que los palpadores 20, y diferentes elementos que han de ser actuados, se encuentran conectados con un equipo de superficie que permite realizar las funciones comentadas. En el caso de que sean conexiones eléctricas, éstas pueden efectuarse de forma inalámbrica. Una posible conexión con la carcasa 1 con conducciones que discurren hasta la superficie, se representa mediante la referencia 23. Una vez formada la cámara estanca 6, se desinfla el pistón inflable 17, de forma que las cuñas 12 se desplazan sobre las guías inclinadas 13 enclavándose sobre la superficie de la tubería 5, de modo que se produce la fijación de la carcasa 1 sobre la tubería 5. A continuación se procede a vaciar la cámara estanca 6, del agua que contiene en su interior, mediante medios de inyección de aire en la cámara estanca 6 que producen el vaciado del agua a través de válvulas anti-retorno (no representadas) previstas en las porciones 2 de la carcasa lo Estos medios por ejemplo pueden ser un compresor que puede estar ubicado fuera del agua y conectado con las porciones 2 en las que se prevén unas boquillas (no representadas) que insuflan el aire al interior de la cámara estanca 6, desplazando el agua a través de las válvulas anti-retorno. El compresor también puede estar dispuesto sobre una de las porciones 2, y ser actuado desde la superficie. En este punto cabe comentar que las porciones 2 están dotadas de unos pies centradores asistidos por un resorte, que al realizar la aproximación de las porciones 2, apoyan y presionan sobre la superficie de la tubería 5, de forma que se facilita el centrado de las porciones 2 al ubic~rlas sobre la tubería 5. Una vez que la cámara estanca 6 se encuentra vaciada de agua, en el caso en el que la tubería deba de ser limpiada, se prevé la incorporación de medios de limpieza que comprende un depósito de un producto abrasivo, y un compresor conectado con las boquillas previstas en las porciones 2 para proyectar el producto abrasivo de limpieza sobre la tubería y a continuación se activan unos medios de aspiración que succiona todos los residuos producidos en la limpieza, a través de unas boquillas. Los medios de aspiración, también pueden ser empleados como medios de vaciado del agua incluida en la cámara estanca 6. Una vez que la tubería se encuentra lista para ser reparada, la invención prevé que su reparación pueda ser efectuada mediante un rodillo 24, ubicado en el interior de 5 la cámara estanca 6, que mediante unos brazos 27 está fij ado sobre un ej e giratorio 25 asistido por un resorte 26, de forma que los extremos del eje giratorio 25 están fijados sobre dos discos giratorios 28 dispuestas paralelos a las bridas extremas 3, cuyo desplazamiento angular es 10 guiado mediante rodamientos 29 fijados en las bridas extremas 3. Para producir el desplazamiento angular de los discos giratorios 28, se prevé que éstos estén dotados de una corona dentada 31 que engrana con un motor que produce el desplazamiento angular de dichos discos giratorios 28. 15 Por la acción del resorte 26, se mantiene al rodillo 24 presionando sobre la superficie de la tubería 5, de forma que al accionar el motor el rodillo 24 gira alrededor de su eje y alrededor de la tubería 5. El eje del rodillo 24 presenta una configuración 2 O tubular y está conectado con depósitos de resina, y con unos orificios 30 practicados en la superficie del rodillo 24, de forma que al producirse el desplazamiento del rodillo 24 sobre la tubería 30, ésta se impregna de resina proporcionándole una capa de recubrimiento, a modo de 25 pintura, que puede determinar la reparación de dicha tubería, cuando los daños sufridos en la tubería no son elevados. El número de vueltas que el rodillo 24 da alrededor de la tubería 5, varía en función de las necesidades de la reparación a efectuar en la tubería 5. 30 El depósito de resina puede encontrarse en la superficie, o sobre la carcasa 1, de forma que en cualquiera de los casos se encuentra en una posición fija, por lo que para permitir que se produzca el giro del rodillo 24 sobre su ej e y alrededor de la tubería 30, se prevén medios de conexión del ej e tubular del rodillo 24 con los depósitos de resina, para lo que dicha conexión comprende un primer racor hembra 32 y un segundo racor hembra 33 que se encuentran fijados a los discos giratorios 28, de forma que dichos racores 32 y 33 giran junto con los discos giratorios 28, y además están conectados con el eje tubular del rodillo 24. En correspondencia con el primer racor hembra 32 se ha previsto un primer racor macho 35, y en correspondencia con el segundo racor hembra 33 se ha previsto un segundo racor macho 36. El primer y segundo racor macho 35 y 36 están dispuestos sobre un carril semicircular 37 de posición fija y previsto alrededor de la tubería 5, de forma que cada uno de dichos primer y segundo racor macho 35 y 36 están conectados con un depósito de resina mediante una conducción 39, Y a su vez están asistidos por un fleje que los mantiene en el extremo inicial del carril semicircular 37. Además, en el trayecto que realizan el primer y segundo racor hembra 32 y 33, se prevén unas levas 38, de forma que están previstas en correspondencia con el inicio y final de cada carril 37, para producir el desplazamiento de dichos racores hembra 36 y 37 venciendo la acción del resorte 34. En base a la descripción realizada, se comprende fácilmente que cuando el primer racor hembra 32 está acoplado al primer racor macho 35, el giro de los discos giratorios 28 produce el desplazamiento de los racores hembra 32 y 33, de forma que el primer racor hembra 32 arrastra al primer racor macho 35 sobre el carril 37 venciendo la acción del fleje, con lo que cuando llega al final del carril 37 la leva 38 que está dispuesta en la parte inicial del siguiente carril 37, produce la elevación del segundo racor hembra 33 venciendo la acción de su resorte 34, de forma que al dej ar de actuar la leva 38 sobre el segundo racor hembra 33, el resorte 34 produce su descenso, acoplándose sobre el segundo racor macho 36, que mediante la conducción 39 se encuentra unido a un depósito 5 de resina, de forma que la resina circula a través del segundo racor macho 36, del segundo racor hembra 34, hasta que llega hasta el eje tubular del rodillo 24. A continuación el primer racor hembra 32 contacta con la leva 38 situada al inicio del siguiente carril 37, produciendo 10 su elevación y su desconexión respecto del primer racor macho 35, de forma que así se permite mantener siempre la alimentación de la resina al interior del ej e tubular del rodillo 24. En los siguientes 180 0 de desplazamiento angular de los discos giratorios 28, es nuevamente el 15 primer racor macho 35 el que se acopla sobre el primer racor hembra 32 y a continuación se desconecta el segundo racor hembra 33 del segundo racor macho 36, repitiéndose el proceso por cada una de las vueltas que deba de dar el rodillo 24. 2 O En este punto cabe señalar, que el vaciado del agua del interior de la cámara estanca 6, también puede realizarse inyectando aire al ej e del rodillo 24 a través del mecanismo descrito para la inyección de resina al ej e tubular del rodillo 24, pero con la diferencia de que en 25 este caso en lugar de resina se aplica aire comprimido. En el caso en el que el daño sufrido por la tubería no pueda ser reparado mediante la aplicación de una capa de resina, la invención prevé otros medios de reparación que comprenden una caj a estanca 40 que comunica con la cámara 30 estanca 6 mediante una trampilla 41, y de forma que en el interior de la caja estanca 40 se han previsto unas guías telescópicas 42 asistidas por un pistón 43, para ubicar en el extremo inferior de las guías telescópicas 42 una bobina 44, que en el ejemplo de realización de la invención la bobina 44 está dispuesta sobre una soporte 45 que se ubica sobre las guías telescópicas 42. La bobina 44 tiene enrollada una lámina de reparación de tuberías de tipo convencional, de forma que dicha bobina 44 se dispone sobre las guías telescópicas 42 con un tramo de su extremo desenrollado y guiado sobre unos rodillos-guía 46, de modo que el tramo desenrollado se mantiene en posición vertical. Para permitir realizar la reparación mediante la lámina de la bobina 44, ha de realizarse el enrollado de la misma alrededor de la tubería 5, para lo que en el interior de la cámara estanca 6 se prevén sendos brazos 47 cada uno de ellos fij ados sobre los discos giratorios 28, de forma que al actuarse el pistón 43, se produce el desplazamiento de las guías telescópicas 42 que realizan la apertura de la trampilla 41, con lo que la bobina 44 desciende al interior de la cámara estanca 6, hasta que unos pivotes extremos 48 previstos sobre el soporte 45 de la bobina, se introducen en un alojamiento 49 previsto en el extremo de los brazos 47, que mediante un prisionero de bola 50 se produce la entrada de la bola en una muesca practicada en los pivotes extremos 48, fijándose de esta forma la bobina 44 sobre los brazos 47, y todo de forma que el extremo de la lámina del rodillo quede ubicada sobre la superficie de la tubería 5. Además el rodillo 24 se encuentra ubicado en una posición en la que al efectuarse el desplazamiento de los discos giratorios 28, y por tanto el desplazamiento del rodillo 24 y bobina 44, dicho rodillo 24 presiona sobre el extremo de la lámina, realizando su desenrollado, y simultáneamente su enrollado alrededor de la tubería 5. En este caso a la vez que se realiza el enrollado de la lámina alrededor de la tubería 5, también se puede aplicar resina a través de los orificios 30 del rodillo 24 para conseguir un mayor efecto reparador de la tubería 5. Una vez aplicada la resina, bien independientemente o junto con la lámina, según las dos realizaciones descritas, se prevé que el rodillo 24 esté dotado de un mecanismo de elevación/descenso que se complementa con la incorporación de una palanca 51 solidaria del eje giratorio 25 sobre el que se soporta el rodillo 24 mediante los brazos 27 ya descritos, de modo que en el trayecto que realiza la palanca 51, se ha previsto una leva de posición desplazable 52, cuya posición es regulable mediante un pistón 53, de forma que cuando dicha leva desplazable 52 se posiciona en correspondencia con la palanca 51, al contactar con la leva desplazable 52, se produce el desplazamiento angular del eje giratorio 25 venciendo la acción del resorte 26, lo que produce la elevación del rodillo 24, de forma que mediante un pasador 54 se produce el enclavamiento del eje giratorio 25 en la posición en la que el rodillo 24 se encuentra elevado, tal y como se demuestra esquemáticamente en la figura 12. De esta forma, se evita que el rodillo pueda pegarse sobre la superficie de la tubería, una vez que se ha aplicado la resina y se produzca el secado de la misma. Para realizar nuevamente el descenso del rodillo 24 en su posición sobre la tubería 5, se prevé la incorporación de una cuña 55 dispuesta en el trayecto de un elemento desplazable 56 que es solidario del pasador 54, de forma que cuando la cuña 55 contacta con el elemento desplazable 56, venciendo la acción de un resorte 57, que lo asiste, produce el desplazamiento del pasado 54 y el desenclavamiento del eje giratorio 25, que por la acción del resorte 26, desciende hasta presionar con la superficie de la tubería 5, para realizarse una nueva reparación. Para favorecer la reacción química de la resina, y acelerar su secado, se prevé la incorporación de medios de secado que están constituidos por una resistencia de calentamiento de la cámara estanca 6 y del segmento de tubería en el que está instalada la carcasa, para facilitar la reacción química y solidificación de la resina aplicada. Cabe señalar que en el caso en el que la reparación de una tubería requiera el relleno de cavidades detectadas en su superficie, se prevé que la carcasa comprenda un elemento de disparado mediante aire comprimido de bolas de resina para relleno de dichas cavidades detectadas en la superficie de la tubería. Una vez realizada la reparación de la tubería, se procede nuevamente a separar las porciones 2 actuando el elemento extensible 7, permitiéndose continuar el deslizamiento de la carcasa sobre la tubería 5, hasta encontrar una nueva zona dañada, procediéndose a realizar su reparación de la forma ya comentada. Seguidamente se enumeran las diferentes referencias utilizadas en los ej emplos de realización, para facilitar el seguimiento de su explicación: 1. Carcasa 2. Porciones (de carcasa) 3. Bridas extremas 3a. Junta estanca 4. Borde inferior (de bridas extremas) 5. Tubería 6. Cámara estanca 7. Elemento extensible 8. Guías 9. Segmentos de collarín 10. Brazo articulado 11. Pletinas 12. Cuña 13. Guía inclinada 14. Soporte 15. Pivotes guía 16. Segmentos de aro 17. Pistón inflable 18. Rodillos 19. Resorte 20. Palpadores 21. Ruedas de transporte 22. Enganches 23. Conexiones con superficie 24. Rodillo 25. Eje giratorio 26. Resorte 27. Brazos 28. Discos giratorios 29. Rodamientos 30. Orificios 31. Corona dentada 32. Primer racor hembra 33. Segundo racor hembra 34. Resorte 35. Primer racor macho 36. Segundo racor macho 37. Carril 38. Levas 39. Conexión de 35 y 36 con depósito resina 40. Caja estanca 41. Trampilla 42. Guías telescópicas 43. Pistón 44. Bobina 45. Soporte de bobina 46. Rodillos-guía 47. Brazos 48. Pivotes extremos 49. Alojamiento 50. Prisionero de bola 51 . Palanca 52. Leva de posición desplazable 53. Pistón 54. Pasador 55. Cuña 56. Elemento desplazable 57. Resorte
Publicaciones:
ES2387656 (27/09/2012) - A1 Solicitud de patente con informe sobre el estado de la técnica
ES2387656 (05/08/2013) - B1 Patente de invención
Eventos:
En fecha 02/03/2011 se realizó Registro Instancia de Solicitud
En fecha 16/03/2011 se realizó Admisión a Trámite
En fecha 16/03/2011 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 22/07/2011 se realizó 3511X_Petición Copia Certificada
En fecha 28/07/2011 se realizó Solicitud Copia Aprobada
En fecha 28/07/2011 se realizó 1514X_Copia Autorizada en Tramitación
En fecha 28/10/2011 se realizó Continuación del Procedimiento
En fecha 11/11/2011 se realizó Publicación Continuación del Procedimiento
En fecha 13/02/2012 se realizó 1109P_Comunicación Traslado del IET
En fecha 27/09/2012 se realizó Publicación Solicitud
En fecha 27/09/2012 se realizó Publicación Folleto Solicitud con IET (A1)
En fecha 28/01/2013 se realizó Reanudación Procedimiento General de Concesión
En fecha 07/02/2013 se realizó Publicación Reanudación Procedimiento General de Concesión
En fecha 07/05/2013 se realizó Publicación Traslado Observaciones del IET
En fecha 23/07/2013 se realizó Sin Modificación de Reivindicaciones
En fecha 24/07/2013 se realizó Concesión
En fecha 24/07/2013 se realizó 1203P_Notificación Concesión por Procedimiento General de Concesión
En fecha 05/08/2013 se realizó Publicación concesión Patente PGC
En fecha 05/08/2013 se realizó Publicación Folleto Concesión
En fecha 02/12/2013 se realizó Entrega título
En fecha 13/01/2014 se realizó 3412X_Baja Mandatario
En fecha 13/01/2014 se realizó Baja mandatario
En fecha 23/06/2022 se realizó Declaración de Caducidad
En fecha 23/06/2022 se realizó 1560X_Notificación Declaración de Caducidad
En fecha 29/06/2022 se realizó Publicación Declaración de Caducidad
Pagos:
20/08/2013 - Pago Tasas Concesión
20/08/2013 - Pago 03 Anualidad
04/11/2013 - Bono en Pago Tasas Concesión (B1)
04/11/2013 - Bono en Pago 03 Anualidad (B1)
17/02/2014 - Pago 04 Anualidad
23/03/2015 - Bono en Pago 04 Anualidad (B1)
08/03/2016 - Pago 05 Anualidad
22/03/2016 - Pago 06 Anualidad
28/03/2017 - Pago 07 Anualidad
04/04/2018 - Pago 08 Anualidad
03/04/2019 - Pago 09 Anualidad
01/04/2020 - Pago 10 Anualidad
Fuente de la información
Parte de la información aquí publicada es pública puesto que ha sido obtenida de la Oficina de Propiedad Industrial de los diferentes países el 09/05/2024 y por lo tanto puede ser que la información no esté actualizada.Parte de la información aquí mostrada ha sido calculada por nuestro sistema informático y puede no ser veraz.
Privacidad
Si considera que al información aquí publicada afecta a su privacidad y desea que eliminemos la información aquí publicada envíe un email a info@patentes-y-marcas.com o rellene el formulario que encontrará aquí.Información sobre el registro de patente nacional por APARATO Y MÉTODO DE REPARACIÓN DE TUBERÍAS SUBMARINAS. con el número P201130276
El registro de patente nacional por APARATO Y MÉTODO DE REPARACIÓN DE TUBERÍAS SUBMARINAS. con el número P201130276 fue solicitada el 02/03/2011. Se trata de un registro en España por lo que este registro no ofrece protección en el resto de países. El registro APARATO Y MÉTODO DE REPARACIÓN DE TUBERÍAS SUBMARINAS. con el número P201130276 fue solicitada por LUIS FIDEL DE LA TORRE UGARTE DEL CASTILLO. El registro [modality] por APARATO Y MÉTODO DE REPARACIÓN DE TUBERÍAS SUBMARINAS. con el número P201130276 está clasificado como F16L 55/18,F16L 55/175 según la clasificación internacional de patentes.
Otras invenciones solicitadas en la clasificación internacional de patentes F16L 55/18,F16L 55/175.
Es posible conocer invenciones similares al campo de la técnica se refiere. El registro de patente nacional por APARATO Y MÉTODO DE REPARACIÓN DE TUBERÍAS SUBMARINAS. con el número P201130276 está clasificado con la clasificación F16L 55/18,F16L 55/175 por lo que si se desea conocer más registros con la clasificación F16L 55/18,F16L 55/175 clicar aquí.Patentes en España
Es posible conocer todas las invenciones publicadas en España entre las que se encuentra el registro patente nacional por APARATO Y MÉTODO DE REPARACIÓN DE TUBERÍAS SUBMARINAS.. Nuestro portal www.patentes-y-marcas.com ofrece acceso a las publicaciones de patentes en España. Conocer las patentes registradas en un país es importante para saber las posibilidades de fabricar, vender o explotar una invención en España.Patentes registradas en la clase F
Es posible conocer todas las patentes registradas en la clase F ( MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA) entre las que se encuentra la patente APARATO Y MÉTODO DE REPARACIÓN DE TUBERÍAS SUBMARINAS. con el número P201130276. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase F16
Es posible conocer todas las patentes registradas en la clase F16 (ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS M) entre las que se encuentra la patente APARATO Y MÉTODO DE REPARACIÓN DE TUBERÍAS SUBMARINAS. con el número P201130276. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase F16L
Es posible conocer todas las patentes registradas en la clase F16L (TUBERIAS O TUBOS; EMPALMES U OTROS ACCESORIOS PARA TUBERIAS; SOPORTES PARA TUBOS, CABLES O CONDUCTOS) entre las que se encuentra la patente APARATO Y MÉTODO DE REPARACIÓN DE TUBERÍAS SUBMARINAS. con el número P201130276. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.
¿Tienes alguna duda?
Escribe tu consulta y te responderemos rápida y gratuitamente.

Otras patentes similares
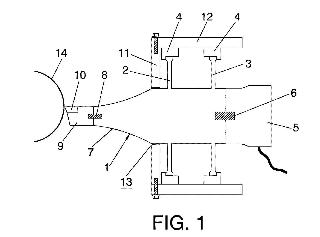
 P201130046
P201130046 P201130051
P201130051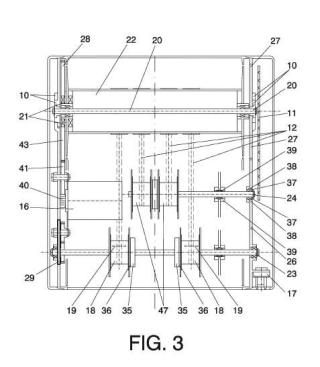 P201130351
P201130351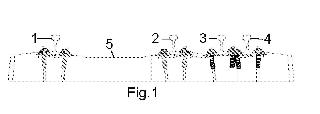 P201130443
P201130443Profesionales Recomendados
Barcelona
933182440
España
933182440
España

Barcelona
+34 93 362 16 97
España
+34 93 362 16 97
España

Barcelona
932 593 600
España
932 593 600
España







