


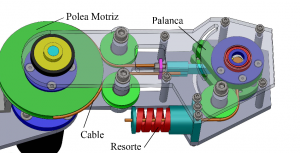
Actuador con mecanismo de rigidez variable y par umbral
UNIVERSIDAD DE ALMERÍA
Contacto



950 214670
Info Anuncio
Visto 1184 veces
Contactado 0 veces
Publicado en:
19/02/2018
Visto 1184 veces
Contactado 0 veces
Publicado en:
19/02/2018
- País:
- Fecha de registro:
- Ámbito de aplicación:
- Número de registro:
- P201200712
- Venta / Licencia:
- Precio:
- 0.00
- Negociable:
- Si
- Titular:
- Universidad de Almería
- Datos del representante:
- Teléfono:
- 950 214670
- Web personal:
- Otros datos:

Actuador para articulaciones de revolución. El actuador dispone de un motor principal para posicionar el eslabón de salida. Un segundo motor de menor tamaño modifica la configuración de un mecanismo interno con el objeto de modificar la rigidez de la transmisión. De esta forma la unión entre el eje de la salida del motor y el eslabón puede comportarse como una unión totalmente rígida o como una unión muy flexible.

Pedir asesoramiento
¿Tienes alguna duda?
Escribe tu consulta y te responderemos rápida y gratuitamente.

Barcelona
933182440
 España
España
933182440
España

Barcelona
+34 93 362 16 97
España
+34 93 362 16 97
España

Barcelona
932 593 600
España
932 593 600
España

