


- Home /
- Publicaciones de patentes /
- Sistema modular de una red eléctrica y método de ensayo de un sistema de medida y monitorización de una red eléctrica
Patente nacional por "Sistema modular de una red eléctrica y método de ensayo de un sistema de medida y monitorización de una red eléctrica"
Este registro ha sido solicitado por
Persona física
a través del representanteELZABURU, S.L.P
Contacto
- Estado: Vigente
- País:
- España
- Fecha solicitud:
- 29/12/2023
- Número solicitud:
-
P202331099
- Número publicación:
-
ES2961406
- Fecha de concesión:
-
- Inventores:
-
Persona física
- Datos del titular:
-
Persona física
- Datos del representante:
-
ELZABURU, S.L.P
- Clasificación Internacional de Patentes:
- G01R 31/00,H02J 13/00,G01R 17/00,G01R 31/12
- Clasificación Internacional de Patentes de la publicación:
- G01R 31/00,H02J 13/00,G01R 17/00,G01R 31/12
- Fecha de vencimiento:
Quiero registrar una patente

Reivindicaciones:
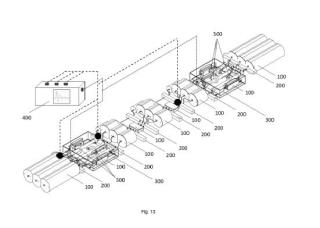
+ ES-2961406_A11. Sistema modular de una red eléctrica caracterizado por que comprende: • un subsistema de módulos operativos (100) , que comprende una pluralidad de módulos operativos (101) configurados para reproducir el funcionamiento de una red eléctrica; • un subsistema de posicionamiento de defectos y fallos (200) conectado al subsistema de módulos operativos (100) , donde el subsistema de posicionamiento de defectos y fallos (200) comprende al menos un bloque de generación (201) de un defecto o fallo en el subsistema de módulos operativos (100) ; • un subsistema de inyección de ruido (300) conectado al subsistema de módulos operativos (100) , donde el subsistema de inyección de ruido (300) comprende al menos un bloque de inyección de ruido (301) configurado para inyectar una señal de ruido en el subsistema de módulos operativos (100) ; • un subsistema de generación de señales (400) conectado al subsistema de posicionamiento de defectos y fallos (200) y al subsistema de inyección de ruido (300) , donde el subsistema de generación de señales (400) está configurado para: generar y enviar señales al al menos un bloque de generación (201) de un defecto o fallo para la introducción de al menos una señal de defecto o fallo en el subsistema de módulos operativos (100) , y; generar y enviar señales al al menos un bloque de inyección de ruido (301) para la inyección de al menos una señal de ruido aleatorio en el subsistema de módulos operativos (100) ; • un subsistema de sensores (500) conectado al subsistema de módulos operativos (100) , donde el subsistema de sensores (500) comprende una pluralidad de sensores (501) configurados para monitorizar y/o realizar medidas en el subsistema de módulos operativos (100) , y; • un subsistema de medida (600) conectado al subsistema de sensores (500) , donde el subsistema de medida (600) comprende al menos una unidad de adquisición de datos (601) configurada para registrar y/o procesar y/o mostrar los datos relativos a mediciones de los sensores (501) . 2. Sistema modular de una red eléctrica, según la reivindicación 1, caracterizado por que el subsistema de módulos operativos comprende uno o más de cada uno de al menos los siguientes módulos operativos (101) : a. un módulo de cable aislado (101a) ; b. un módulo de cable aéreo (101b) ; c. un módulo de empalmes rectos (101c) ; d. un módulo de empalmes con cruzamiento de pantallas (101d) ; e. un módulo GIS (101e) ; f. un módulo de celdas de distribución (101f) ; g. un módulo de transformador (101 g) ; h. un módulo de máquina rotativa (101 h) , y; i. un módulo auxiliar de conexión (101i) entre módulos operativos (101) . 3. Método de ensayo de un sistema de medida y monitorización de una red eléctrica, que comprende hacer uso de un sistema modular de una red eléctrica según cualquiera de las reivindicaciones anteriores, caracterizado por que comprende: a. configurar (EP1) el sistema modular mediante la interconexión de los subsistemas (100, 200, 300, 400, 500, 600) ; b. generar (EP2) defectos y/o fallos y/o ruido en el sistema modular, y; c. medir y registrar (EP3) las mediciones obtenidas mediante el subsistema de sensores (500) y mediante el subsistema de medida (600) , obteniendo una caracterización del sistema de medida y monitorización compuesto por el subsistema de sensores (500) y/o el subsistema de medida (600) ante los defectos y/o fallos y/o ruido generados. 4. Método de ensayo de un sistema de medida y monitorización de una red eléctrica según la reivindicación 3, caracterizado por que la etapa de configuración (EP1) del sistema modular comprende: a. conectar entre sí los distintos módulos operativos (101) del subsistema de módulos operativos (100) ; b. conectar el al menos un bloque de generación (201) de un defecto o fallo a al menos un punto del subsistema de módulos operativos (100) ; c. conectar el al menos un bloque de inyección de ruido (301) a al menos un punto del subsistema de módulos operativos (100) ; d. conectar el subsistema de generación de señales (400) al al menos un bloque de generación (201) de un defecto o fallo y al al menos un bloque de inyección de ruido (301) ; e. conectar los sensores (501) a distintos puntos del subsistema de módulos operativos (100) ; f. conectar el subsistema de medida (600) a los sensores (501) , y; g. poner en funcionamiento los distintos módulos operativos (101) . 5. Método de ensayo de un sistema de medida y monitorización de una red eléctrica según la reivindicación 3 ó 4, caracterizado por que la etapa de generar (EP2) defectos y/o fallos y/o ruido en el sistema modular comprende: a. seleccionar un conjunto de ensayos de referencia; b. ajustar cada uno de los subsistemas (100, 200, 300, 0 400, 500, 600) a los ensayos seleccionados; c. generar, mediante el subsistema de generación de señales (400) y mediante el al menos un bloque de generación (201) de un defecto o fallo, al menos un defecto o fallo y/o señal de ruido pulsante en el subsistema de módulos operativos (100) ; d. generar, mediante el subsistema de generación de señales (400) y mediante el al menos un bloque de inyección de ruido (301) , al menos una señal de ruido aleatorio en el subsistema de módulos operativos (100) , y; e. ajustar el nivel de señal de defecto o fallo y/o el nivel de señal de ruido. 6. Método de ensayo de un sistema de medida y monitorización de una red eléctrica según cualquiera de las reivindicaciones 3 a 5, caracterizado por que la etapa de medir y registrar (EP3) las mediciones obtenidas mediante el subsistema de sensores (500) y mediante el subsistema de medida (600) , obteniendo una caracterización del sistema de medida y monitorización compuesto por el subsistema de sensores (500) y el subsistema de medida (600) ante los defectos y/o fallos y/o ruido generados comprende: a. realizar mediciones con el subsistema de sensores (500) y con el subsistema de medida (600) , y; b. evaluar las medidas obtenidas mediante el subsistema de sensores (500) y mediante el subsistema de medida (600) y obtener un informe de resultados.
Los productos y servicios protegidos por este registro son:
G01R 31/00 - H02J 13/00 - G01R 17/00 - G01R 31/12
Descripciones:
+ ES-2961406_A1 Sistema modular de una red eléctrica y método de ensayo de un sistema de medida y monitorización de una red eléctrica Objeto de la invención La presente invención se refiere a un sistema modular de una red eléctrica que permite reproducir, a escala de laboratorio, el funcionamiento de una red eléctrica a escala industrial, y reproducir igualmente diferentes condiciones operativas de la red eléctrica, en las cuales pueden presentarse defectos en los diferentes elementos que constituyen la red eléctrica, y fallos de funcionamiento (por ejemplo cortocircuitos en diferentes puntos de la red eléctrica) . La presente invención se refiere también a un método de ensayo de un sistema de medida y monitorización de una red eléctrica. El método de ensayo permite caracterizar el sistema de medida y monitorización de la red eléctrica, permitiendo de esta manera conocer con precisión sus fortalezas, debilidades y líneas de mejora, cuando supervisan las redes eléctricas a escala industrial. El sistema modular de una red eléctrica y el método de ensayo de un sistema de medida y monitorización de una red eléctrica, objetos de la presente invención, son de especial aplicación en la supervisión y control de las redes eléctricas. Antecedentes de la invención y problema técnico a resolver Los sistemas eléctricos de alta tensión (AT) están sometidos durante su vida útil a condiciones de funcionamiento donde aparecen solicitaciones eléctricas, mecánicas, térmicas y relacionadas con fenómenos medioambientales que, con el tiempo, provocan fallos imprevistos generados por distintos tipos de defecto. Por este motivo son numerosas las tecnologías conducentes a la medida y monitorización de las redes, con el objetivo de inimizar el número de fallos o en el caso de que éstos se produzcan, con el objetivo de que éstas queden protegidas de forma adecuada y vuelvan a su funcionamiento normal lo antes posible. De este modo, por un lado, una detección precoz de los defectos, preferiblemente en su estado incipiente, permitirá tomar las acciones correctivas necesarias para evitar fallos imprevistos que conllevan riesgos humanos y daños materiales, faltas de suministro e importantes pérdidas económicas. Y por otro, en el caso de producirse un fallo, una detección eficiente permitirá que las instalaciones queden protegidas de forma adecuada, minimizándose al máximo los tiempos de actuación y los efectos negativos anteriores. Actualmente existen en el mercado numerosas tecnologías conducentes a la medida y monitorización de las redes eléctricas de AT. Los factores principales que se consideran en los sistemas desarrollados para medir y monitorizar las redes son los siguientes. - El estado de los dieléctricos. Los defectos en los dieléctricos, generalmente asociados a la aparición de descargas parciales (DP) , con el tiempo dan lugar a fallos imprevistos. - La aparición de fallos producidos por defectos en los dieléctricos. Estos fallos dan lugar a cortocircuitos intermitentes o permanentes. - La temperatura de los activos. La aparición de puntos calientes por defectos o sobrecarga en las redes puede conducir a la degradación acelerada de los dieléctricos. Por tanto, resultaría conveniente aportar soluciones que permitan mejorar las tecnologías de medida y monitorización desarrolladas para la supervisión de los factores anteriores. Un primer problema al que se enfrentan las empresas del sector eléctrico y los desarrolladores de tecnologías conducentes a la medida y monitorización de las redes, es la falta de procedimientos de referencia o estandarizados que permitan caracterizar de forma completa reproducible la eficacia de estos sistemas medida y monitorización. Los sistemas de medida y monitorización más eficientes y con un coste razonable serán aquellos que ofrezcan mayores garantías de seguridad y los mejores posicionados en el mercado. Un segundo problema que han de afrontar estas empresas es la gran dificultad técnica y económica que tienen para caracterizar o probar los sistemas de medida y monitorización de forma completa y reproducible en instalaciones de campo o de laboratorio donde es necesario la generación y detección de defectos o de fallos reales. Esto se debe a que las instalaciones de campo se encuentran generalmente en servicio de forma permanente, por lo que las empresas propietarias no las pueden ceder para realizar pruebas, que por otro lado podrían causar daños irreversibles en las mismas e incluso en los equipos a probar. Por otro lado, en la mayoría de los casos, las instalaciones de laboratorio que se precisan suelen ser complejas, caras y solo se pueden utilizar para un número limitado de pruebas de caracterización y en una ubicación específica. Además, en las instalaciones de campo no es posible controlar las condiciones de ruido eléctrico y en las de laboratorio conseguir un control preciso generalmente resulta difícil y costoso. Un tercer problema principal surge porque en ambos casos (con instalaciones de campo o de laboratorio) , con el estado de la técnica actual, no resulta posible crear las condiciones de medida controladas necesarias para la completa y reproducible caracterización de los sistemas de medida y monitorización. Las condiciones de medida están relacionadas con la forma de generar defectos, fallos y señales de ruido y con el tipo y posicionamiento de los sensores. En las instalaciones de campo o de laboratorio las condiciones de medida están muy limitadas y vienen impuestas por la propia disposición puntual de las mismas, por la posible disposición puntual de algún tipo de sensor y por el ruido presente, generalmente variable y no controlable en el entorno de los puntos de medida. Para caracterizar de forma completa y reproducible los sistemas de medida y monitorización, es preciso controlar las señales de ruido y crear condiciones de medida relativas a la generación de defectos, fallos y ruido y posicionamiento de sensores, que sean variables, controlables y reproducibles. Esto sólo se puede conseguir creando estas condiciones de medida en un sistema modular a escala físico, en el que se simule el comportamiento de varios tipos de red reales. El documento WO 2019162551 A1 se refiere a un "Método para la evaluación y calificación de las características funcionales de instrumentos de medida y diagnóstico de descargas arciales e instalación para generar series de pulsos de referencia de descargas parciales". Este documento pretende dar solución a alguno de los problemas del estado de la técnica mencionados anteriormente. No obstante, con la instalación descrita en el documento WO 2019162551 A1, no es posible simular las condiciones de defecto, fallo y ruido de las redes reales, y no es posible generar y medir de forma controlada defectos o fallos físicos como, por ejemplo, los relacionados con defectos de aislamiento que no generan DP o con la presencia de puntos calientes. Por lo que no resulta viable hacer las caracterizaciones de los sistemas de medida y monitorización de una red eléctrica de forma completa y reproducible. Por otro lado, con la inyección de las señales que simulan defectos, fallos y condiciones de ruido (generadas con un generador analógico como el propuesto en WO 2019162551 A1) , directamente en las unidades de medida de los sistemas a caracterizar, no resulta viable hacer las caracterizaciones de forma completa y reproducible, con sensores reales en un sistema físico y midiendo en un número no limitado de puntos. Por otra parte, con la generación de defectos o fallos físicos o con la inyección directa de las señales que simulan defectos, fallos y condiciones de ruido (generadas con un generador analógico) , en instalaciones reales existentes (de campo o de laboratorio) o en la propuesta (de laboratorio) del documento WO 2019162551 A1, no resulta posible realizar la simulación de los defectos, fallos y condiciones de ruido de forma adecuada. Esto es debido a que, dadas las características de las instalaciones de campo o de laboratorio, no es posible generar y medir los defectos o fallos físicos de forma controlada, controlar la adaptación de impedancias en los puntos de inyección y por tanto tampoco las características de las señales inyectadas. Tampoco es posible controlar diferentes condiciones de ruido en el entorno de los sensores. Por otro lado, acondicionar las instalaciones de campo o de laboratorio existentes para simular las condiciones de defecto, fallo y ruido de las redes reales, generando y midiendo de forma controlada los defectos, fallos y ruido, supondría un esfuerzo técnico y económico prácticamente inabordable y, en consecuencia, que no sea posible hacer las caracterizaciones de los instrumentos de medida y monitorización de forma completa y reproducible. Esto es ebido a la gran variedad de configuraciones físicas de estas instalaciones, a sus características técnicas y complejidad y a su dificultad de utilización. En resumen, durante la vida útil de los sistemas eléctricos de AT, éstos están sometidos a varios tipos de solicitaciones y a fenómenos medioambientales que provocan en ellos defectos que a menudo derivan en fallos. Con el objetivo de minimizar el número de fallos, o cuando éstos se producen, de que las redes de AT queden protegidas de forma adecuada, las empresas del sector eléctrico desarrollan y utilizan tecnologías conducentes a la medida y monitorización de los sistemas eléctricos. Con la medida y monitorización de los sistemas, mediante la detección eficiente y precoz de los defectos se pueden tomar las acciones correctivas necesarias para evitar fallos imprevistos. Por otro lado, mediante la detección eficiente de los fallos, las instalaciones quedan protegidas de forma adecuada. En ambos casos se evitan riesgos para los humanos, daños materiales, faltas de suministro, pérdidas económicas y elevados tiempos de actuación cuando aparece una incidencia. Como se ha explicado anteriormente, en el desarrollo y empleo de los sistemas de medida y monitorización, las empresas del sector eléctrico se enfrentan a los siguientes tres problemas fundamentales. - Falta de procedimientos de referencia o estandarizados que permitan su caracterización de forma completa y reproducible. - Dificultad técnica y económica para su caracterización de forma completa y reproducible en instalaciones de campo o de laboratorio por la falta de disponibilidad, los altos costes de utilización y la imposibilidad (en las instalaciones de campo) o gran dificultad (en las de laboratorio) para controlar las condiciones de ruido. - Además, con el uso de las instalaciones anteriores, con el estado de la técnica actual, no resulta posible crear las condiciones de medida controladas necesarias para la completa y reproducible caracterización de los sistemas de medida y monitorización. Descripción de la invención Con la invención que se describe a continuación, basada por un lado en la ejecución de un método de actuación propuesto y, por otro, en el uso de un sistema modular a escala asociado y necesario, es posible caracterizar de forma completa, reproducible y estandarizada los sistemas de medida y monitorización. De este modo, se presenta un desarrollo técnico viable que permite solucionar los tres problemas técnicos anteriores. De este modo, se presenta, por un lado, un método cuya ejecución permite caracterizar los sistemas de medida y monitorización y por otro, un sistema modular de red a escala físico asociado y necesario donde se realizan las pruebas de caracterización. Con el sistema modular a escala se superan las limitaciones y dificultades que aparecen con el uso de instalaciones reales de campo o de laboratorio. Esto se debe principalmente a que en este sistema se simulan las condiciones de medida reales de las redes de forma controlable y reproducible, en lo relativo a la generación de defectos, fallos y ruido y a la adaptación de varios tipos de sensores. La aplicación del método junto con el uso del sistema modular permite la realización de las pruebas de caracterización de los sistemas de medida y monitorización de forma completa, reproducible y estandarizada. Además, al tratarse de un sistema modular a escala transportable, las pruebas se pueden hacer de igual forma en cualquier parte del mundo. Una de las principales ventajas de la presente invención es la posible combinación de los siguientes factores. - Disponibilidad de varios tipos de instalación a escala, formados por diferentes subsistemas de módulos, que simulan varias instalaciones reales concretas. - Empleo de un subsistema integrado en la instalación a escala para el posicionamiento de defectos y fallos. - Y empleo de un subsistema de generación de señales y de un subsistema de inyección de ruido aleatorio, también integrados en la instalación a escala y adaptados a las condiciones de medida de los subsistemas de sensores de los sistemas a caracterizar. La invención que se presenta contribuye de forma significativa al avance tecnológico de las redes supervisadas inteligentes del futuro, conocidas como "smart grids". Así pues, con objeto de solucionar los inconvenientes anteriormente mencionados, la presente invención se refiere a un sistema modular de una red eléctrica y a un método de ensayo de un sistema de medida y monitorización de una red eléctrica. El sistema modular de una red eléctrica comprende: • un subsistema de módulos operativos, que comprende una pluralidad de módulos operativos configurados para reproducir el funcionamiento de una red eléctrica; • un subsistema de posicionamiento de defectos y fallos conectado al subsistema de módulos operativos, donde el subsistema de posicionamiento de defectos y fallos comprende al menos un bloque de generación de un defecto o fallo en el subsistema de módulos operativos; • un subsistema de inyección de ruido conectado al subsistema de módulos operativos, donde el subsistema de inyección de ruido comprende al menos un bloque de inyección de ruido configurado para inyectar una señal de ruido en el subsistema de módulos operativos; • un subsistema de generación de señales conectado al subsistema de posicionamiento de defectos y fallos y al subsistema de inyección de ruido, donde el subsistema de generación de señales está configurado para: generar y enviar señales al al menos un bloque de generación de un defecto o fallo para la introducción de al menos una señal de defecto o fallo en el subsistema de módulos operativos, y; generar y enviar señales al al menos un bloque de inyección de ruido para la inyección de al menos una señal de ruido aleatorio en el subsistema de módulos operativos; • un subsistema de sensores conectado al subsistema de módulos operativos, donde el subsistema de sensores comprende una pluralidad de sensores configurados para monitorizar y/o realizar medidas en el subsistema de módulos operativos, y; • un subsistema de medida conectado al subsistema de sensores, donde el subsistema de medida comprende al menos una unidad de adquisición de datos configurada para registrar y/o procesar (realizar cálculos) y/o mostrar los datos relativos a mediciones de los sensores. Mediante el sistema modular de una red eléctrica descrito anteriormente, se permite reproducir fielmente, a escala reducida o de laboratorio, las características constructivas y funcionales de una red eléctrica a escala industrial, y se permite emular las diferentes señales que se propagan a lo largo de la red eléctrica en caso de defecto en alguno de sus elementos operativos constituyentes o en caso de fallo (por ejemplo, un cortocircuito en uno o más puntos a lo largo de la red eléctrica) , así como emular las señales de ruido normalmente presentes en una red eléctrica. Gracias al sistema modular descrito anteriormente, se pueden reproducir diferentes condiciones de defecto y fallo, para caracterizar con ello los sistemas de medida y monitorización (que comprenden los sensores) de una red eléctrica. De manera preferente, el subsistema de módulos operativos comprende uno o más de cada uno de al menos los siguientes módulos operativos: • un módulo de cable aislado; • un módulo de cable aéreo; • un módulo de empalmes rectos; • un módulo de empalmes con cruzamiento de pantallas; • un módulo GIS (módulo de subestación aislada con gas) ; • un módulo de celdas de distribución; • un módulo de transformador; • un módulo de máquina rotativa, y; • un módulo auxiliar de conexión entre módulos operativos. Tal y como ya se ha mencionado, la presente invención se refiere también a un método de ensayo de un sistema de medida y monitorización de una red eléctrica. El método de ensayo de un sistema de medida y monitorización de una red eléctrica, objeto de la presente invención, comprende hacer uso de un sistema modular de una red eléctrica según se ha descrito anteriormente. El sistema de medida y monitorización que se pretende caracterizar (o evaluar) está compuesto por el subsistema de sensores y el subsistema de medida del sistema modular de una red eléctrica descrito anteriormente. Adicionalmente, el método de ensayo de un sistema de medida y monitorización de una red eléctrica, objeto de la presente invención, comprende: • configurar el sistema modular mediante la interconexión de los subsistemas; • generar defectos y/o fallos y/o ruido en el sistema modular, y; • medir y registrar las mediciones obtenidas mediante el subsistema de sensores y mediante el subsistema de medida, obteniendo una caracterización (o evaluación) del sistema de medida y monitorización ante los defectos y/o fallos y/o ruido generados. De manera preferente, la etapa de configuración del sistema modular comprende: • conectar entre sí los distintos módulos operativos del subsistema de módulos operativos; • conectar el al menos un bloque de generación de un defecto o fallo a al menos un punto del subsistema de módulos operativos; • conectar el al menos un bloque de inyección de ruido a al menos un punto del subsistema de módulos operativos; • conectar el subsistema de generación de señales al al menos un bloque de generación de un defecto o fallo y al al menos un bloque de inyección de ruido; • conectar (o instalar) los sensores en distintos puntos del subsistema de módulos operativos; • conectar el subsistema de medida a los sensores, y; • poner en funcionamiento los distintos módulos operativos. Asimismo, de manera preferente, la etapa de generar defectos y/o fallos y/o ruido en el sistema modular comprende: • seleccionar un conjunto de ensayos de referencia; • ajustar cada uno de los subsistemas a los ensayos seleccionados; • generar, mediante el subsistema de generación de señales y mediante el al menos un bloque de generación de un defecto o fallo, al menos un defecto o fallo y/o señal de ruido pulsante en el subsistema de módulos operativos (si los defectos o fallos son físicos no se utiliza el subsistema de generación de señales) ; • generar, mediante el subsistema de generación de señales y mediante el al menos un bloque de inyección de ruido, al menos una señal de ruido aleatorio en el subsistema de módulos operativos, y; • ajustar el nivel de señal de defecto o fallo y/o el nivel de la señal o señales de ruido. Por último, de manera preferente, la etapa de medir y registrar las mediciones obtenidas mediante el subsistema de sensores y mediante el subsistema de medida, obteniendo una aracterización (o evaluación) del sistema de medida y monitorización (compuesto por el subsistema de sensores y el subsistema de medida) ante los defectos y/o fallos y/o ruido generados comprende: • realizar mediciones con el subsistema de sensores junto con el subsistema de medida, y; • evaluar las medidas obtenidas mediante el subsistema de sensores junto con el subsistema de medida y obtener un informe de resultados (con una caracterización del sistema de medida y monitorización) . El sistema modular a escala, objeto de la presente invención, comprende un diseño que permite su aplicación para el método de ensayo de un sistema de medida y monitorización de una red eléctrica que se describe más adelante. En consecuencia, mediante el sistema modular de una red eléctrica descrito anteriormente se puede realizar una completa, reproducible y estandarizada caracterización de los sistemas de medida y monitorización de una red eléctrica. Los diferentes subsistemas, de forma conjunta, permiten simular diferentes tipos y tamaños de instalaciones eléctricas y con diferentes condiciones de medida en función de las necesidades, lo que confiere una gran versatilidad al mismo. En el sistema modular se simulan los mismos defectos y fallos de aislamiento, las mismas condiciones de ruido y las mismas condiciones de medida de las redes reales. El subsistema de módulos operativos se forma mediante la unión de módulos operativos diseñados a escala que se seleccionan y configuran para simular un tipo determinado de instalación. El subsistema de posicionamiento de defectos y fallos se encuentra distribuido a lo largo del subsistema de módulos operativos. Mediante este subsistema de posicionamiento de defectos y fallos se generan defectos y fallos físicos. Además, este subsistema incluye al menos un bloque de generación de un defecto o fallo, cada uno de estos bloques supone un punto de inyección de señales analógicas para la simulación de los defectos y fallos que generan estas señales. Este subsistema está adaptado al subsistema de módulos operativos y al subsistema de generación de señales. En su diseño se tienen preferentemente en cuenta los siguientes spectos técnicos: caminos de propagación de los efectos de los fenómenos físicos, adaptabilidad de impedancias entre elementos para las señales analógicas y adaptaciones para el posicionamiento de sensores. El subsistema de inyección de ruido es necesario para la reproducción del ruido aleatorio de las instalaciones y se ubica en el entorno de los puntos donde se realizan las medidas. Se trata de un subsistema distribuido a lo largo del subsistema de módulos operativos que compone cada instalación. En el diseño de este subsistema también se tienen en cuenta, preferentemente, al menos los siguientes aspectos técnicos: caminos de propagación de las señales, adaptabilidad de impedancias y adaptaciones para el posicionamiento de sensores. Con el uso conjunto de los cuatro subsistemas, éste, más el de módulos operativos, el de posicionamiento de defectos y fallos y el de generación de señales, se pueden simular las condiciones de defecto, fallo, ruido y medida propias de las redes reales. Esto supone una solución válida para la completa y reproducible caracterización de los sistemas de medida y monitorización. El subsistema de generación de señales permite simular los defectos y fallos que generan señales analógicas y las condiciones de ruido aleatorio e impulsional de las redes. Las señales de defectos, de fallos y de ruido impulsional son inyectadas en el subsistema de posicionamiento de defectos y fallos. Las señales de ruido aleatorio se inyectan en el subsistema de inyección de ruido. Todas las señales anteriores son reproducidas en un generador digital-analógico. En concreto, con este generador se pueden reproducir de forma controlada señales de frecuencia industrial y señales transitorias de alta frecuencia y de ruido eléctrico con diferentes anchos de banda. El subsistema de sensores está constituido por los sensores que se empleen con los sistemas de medida y monitorización, por lo que normalmente se encuentra distribuido a lo largo del subsistema de módulos operativos. El subsistema de medida está preferentemente constituido por al menos una unidad de adquisición de varios canales por punto de medida, propia del sistema de medida y monitorización a caracterizar. La salida de los sensores se conecta a esta unidad. Los módulos operativos del subsistema de módulos operativos se diseñan teniendo en cuenta el requerimiento técnico de poder reproducir los defectos, fallos y condiciones de medida de las redes eléctricas reales, buscando siempre la mejor versión económicamente factible. De ste modo, los módulos operativos están preferentemente diseñados para que los efectos de los defectos físicos o las señales que se generan en la simulación de los defectos y fallos, se propaguen por los mismos de la misma forma que en las instalaciones reales, hasta que llegan a los sensores. En su diseño se ha tenido en cuenta el comportamiento de las señales transitorias de frente rápido que se generan en los defectos y fallos de aislamiento y que tienen componentes espectrales muy por encima de la frecuencia industrial de operación del sistema eléctrico. Según una posible forma de realización, los módulos operativos se han diseñado en base a las siguientes consideraciones: - Selección y disposición de los componentes para que los módulos operativos resulten con un peso, dimensiones y precio adecuados. - Capacidad para transmitir las señales de defectos o fallos en un ancho de banda de al menos hasta 350 MHz, para poder probar tecnologías que trabajen en UHF. - Capacidad para reproducir diferentes regímenes de neutro utilizando varias impedancias de puesta a tierra. - Adaptación de impedancias entre los elementos de los módulos operativos y entre el subsistema de módulos operativos en su conjunto y el resto de subsistemas. Esta consideración es conveniente para evitar distorsiones inadecuadas en las señales por efectos de reflexión y con ello estimaciones incorrectas de la magnitud de las mismas. - Velocidad de las señales cuando se propagan desde el foco del defecto o fallo hasta el punto donde se captan por los sensores. El parámetro de velocidad de propagación de las señales es utilizado por las funcionalidades de los sistemas de medida y monitorización, para determinar el emplazamiento de los defectos o fallos. - Atenuación de los efectos de los defectos físicos desde su foco hasta los sensores. - Atenuación de las señales analógicas en función de la frecuencia, cuando se propagan desde el foco del defecto o fallo hasta los sensores. - Acoplamiento de las señales analógicas entre las tres fases del subsistema de módulos por el fenómeno de "cross-taiking. - Las longitudes de los elementos distribuidos que componen los módulos de cable y GIS, han de ser las adecuadas para que las reflexiones de las señales en los cambios de impedancia del subsistema de módulos, tengan el mismo comportamiento que en los elementos distribuidos de la correspondiente instalación real, independientemente del lugar donde se simulen los defectos o fallos. Si esto se cumple, se evitan distorsiones inapropiadas en las formas de onda de las señales medidas. - Y finalmente, es conveniente que las longitudes seleccionadas para los elementos distribuidos que componen los módulos de cable y GIS contribuyan a satisfacer los requerimientos técnicos de bajo coste, peso y volumen. En este aspecto, el parámetro velocidad de propagación de las señales se ha de adaptar a la longitud final de los elementos coaxiales que configuren estos módulos. El diseño y la adaptación de los cinco subsistemas que componen el sistema modular de una red eléctrica, objeto de la presente invención, permite que, mediante el uso de un generador analógico de no más de 4 canales, se realicen las caracterizaciones de los sistemas de medida y monitorización de forma completa y reproducible, con un número no limitado de puntos de medida, con diferentes casuísticas de defecto, fallo o condiciones de ruido y empleando diferentes tipos de sensores reales. Esto es posible porque, simulando un defecto o fallo en un punto de la instalación y no más de tres señales de ruido aleatorio, como las señales se comportan igual que en las instalaciones reales, es posible medir en varios emplazamientos sin generar señales individuales para cada canal de medida del sistema a caracterizar. Desde un punto de vista técnico, esto supone una solución válida para las caracterizaciones. En el estado de la técnica anterior, si se prescinde del sistema modular y se opta por hacer las caracterizaciones inyectando directamente a las unidades de medida de los sistemas a caracterizar señales que simulan defectos, fallos y condiciones de ruido (generadas con un generador analógico) , no resulta viable hacer las caracterizaciones de los sistemas de medida y monitorización de una red eléctrica de forma completa y reproducible, con sensores reales en un sistema físico y midiendo en un número no limitado de puntos. Esto se debe principalmente a las siguientes consideraciones: - No se pueden reproducir o medir defectos o fallos físicos. - El efecto de los sensores en las caracterizaciones no se puede considerar de forma independiente. - Las señales de defecto, fallo y ruido generadas por cada canal deben ser registradas previamente en instalaciones reales, en varios emplazamientos y para varios sensores y posteriormente deconvolucionadas, con la dificultad que este proceso conlleva. - Si se prescindiese de las instalaciones reales para la adquisición de señales, sería necesario (y prácticamente imposible de abordar) realizar un estudio mediante software de simulación de redes y sensores, aplicando y un tratamiento complejo de las señales a reproducir, para simular las mismas condiciones de defecto, fallo, ruido y medida de las redes reales, considerándose diferentes casuísticas, tipos de sensores y tipos de red. - Se necesitaría una señal analógica individual para cada canal de medida de los sistemas a caracterizar. Como para realizar las caracterizaciones conviene medir al menos en tres puntos de la red trifásica, esto supone la necesidad de disponer de un convertidor digital analógico (D-A) de al menos 9 canales, con la capacidad de generar señales muestreadas con frecuencias de hasta 100 MS/s o incluso 1 GS/s (para caracterizar sistemas que operan en el rango HF, VHF y UHF) . Cada canal de este tipo tiene un coste muy elevado en el mercado, por lo que a partir de cuatro canales esta solución no es rentable. Por otro lado, en el estado de la técnica anterior, si se prescinde del sistema modular y se opta por hacer las caracterizaciones generando defectos físicos en instalaciones de campo o en las de laboratorio existentes, y/o inyectando directamente en las mismas señales que simulan defectos, fallos y condiciones de ruido (generadas con un generador analógico) , todo ello sin emplear un subsistema de posicionamiento de defectos y fallos junto con un subsistema de generación de ruido, no resulta viable hacer las caracterizaciones de los sistemas de medida y monitorización de una red eléctrica de forma completa y reproducible, con sensores reales en un sistema físico y midiendo en un número no limitado de puntos. Esto se debe principalmente a las siguientes consideraciones: - No es posible generar y medir de forma controlada defectos o fallos físicos como, por ejemplo, los relacionados con defectos de aislamiento que no generan DP o con la presencia de puntos calientes. - Si se inyectan en las instalaciones existentes señales que simulan defectos, fallos y condiciones de ruido (generadas con un generador analógico) , no se realiza la simulación de los defectos, fallos y condiciones de ruido de forma adecuada porque, en este caso, no es posible controlar la adaptación de impedancias en los puntos de inyección, no es posible controlar la energía de las señales en los caminos de propagación y no es posible controlar diferentes condiciones de ruido en el entorno de los sensores. También es debido a las diferentes características técnicas de las instalaciones y a la dificultad de controlar la adaptabilidad de los sensores en las mismas. Por otro lado, la opción de diseñar y adaptar un subsistema de posicionamiento de defectos y fallos y/o un subsistema de inyección de ruido, para su uso en las instalaciones de campo o de laboratorio existentes, supone un esfuerzo técnico y económico prácticamente imposible de abordar. Por lo que esta opción no sirve para solucionar el problema indicado en los dos párrafos anteriores. Esto es debido a la gran variedad de configuraciones físicas de estas instalaciones en el entorno de los defectos o fallos y en el entorno de los sensores, a sus diferentes características y complejidad técnica y a su dificultad de utilización. Sin embargo, es posible la cómoda adaptabilidad de estos subsistemas en el sistema modular que se propone en esta invención. Con el sistema modular de una red eléctrica, objeto de la presente invención, es posible realizar medidas de forma completa y reproducible en varios tipos de red y con diferentes sensores y condiciones de medida. Con las capacidades anteriores es posible asentar criterios de referencia para la caracterización general de los sistemas de medida y monitorización de una red eléctrica y poder realizar comparaciones de tecnologías en igualdad de condiciones y de forma estandarizada. De este modo se pueden generar informes de referencia con los resultados obtenidos. A continuación, se indican otras prestaciones importantes del sistema modular de una red eléctrica, objeto de la presente invención: - Gracias a su diseño modular y transportable es posible hacer las caracterizaciones considerando distintos tipos de red y en cualquier parte (laboratorio) del mundo. Esto supone una ventaja considerable frente al uso de soluciones menos adecuadas basadas en el empleo de instalaciones reales de campo o de laboratorio. - Dadas las pequeñas dimensiones del sistema modular y su fácil transportabilidad, es posible su uso en cámaras anecoicas, por lo que el control necesario de los niveles de ruido, posible mediante esta invención debido a la empleabilidad del subsistema de inyección de ruido, puede ser aún más efectivo al poderse evitar el posible ruido residual de los laboratorios apantallados o no apantallados. - Gracias a la forma de generarse los defectos, fallos y ruido en el subsistema de posicionamiento de defectos y fallos y a las características físicas de los elementos del sistema modular, se consigue que éstos sean detectados de la misma forma que en las instalaciones reales, al considerarse, entre otros, los efectos de "cross-taiking en las tres fases y de reflexión, atenuación y velocidad de propagación de las señales. Estas consideraciones permiten caracterizar todo tipo de funcionalidades. - Al poderse realizar pruebas de referencia con diferentes configuraciones de red, el sistema modular resulta útil para caracterizar la sensibilidad de uno o más tipos de sensores. También resulta útil para el estudio del mejor emplazamiento de los sensores y para la determinación del número óptimo de los mismos en función de un determinado nivel de sensibilidad especificado. - Además, se dispone de un sistema muy versátil por los siguientes aspectos: • Es posible la integración conjunta de un número no limitado de módulos operativos en el subsistema de módulos operativos, para configurar instalaciones de mayor tamaño y complejidad. • Al ser modular, mediante la combinación de diferentes módulos operativos es posible configurar, además de los tipos de instalación más habituales (basados en sucesiones de sistemas de cable y centros de transformación) , alguna instalación singular, como por ejemplo una línea de un parque eólico constituida por módulos opcionales de máquina rotativa, transformador, línea de cable aislado, celdas de media tensión (MT) y línea aérea. • Al ser modular, cuando todos los módulos operativos están unidos entre sí, se pueden realizar caracterizaciones en línea (on-line) y cuando se interrumpen las conexiones en algún módulo operativo se pueden hacer caracterizaciones fuera de línea (off-line) , en ambos casos de forma cómoda y sin riesgos eléctricos (todos los módulos tienen las conexiones accesibles y en el modelo a escala se trabaja con niveles de tensión seguros) . • Al ser modular y de tamaño según las necesidades, es de aplicabilidad tanto para los sistemas que operan supervisando una zona concreta y poco extensa de una instalación, como para los que operan supervisando zonas más extensas que incluyen sistemas de cable de longitud considerable. - Finalmente es importante indicar que el uso del sistema modular de una red eléctrica, objeto de la presente invención, permite realizar pruebas de caracterización de sistemas que supervisan redes que operan en corriente continua, mediante la configuración de líneas de transporte constituidas principalmente por los módulos de GIS y de cable, utilizando los módulos adaptados de dos de las fases de los sistemas trifásicos de corriente alterna. La aplicabilidad del método de ensayo de un sistema de medida y monitorización de una red eléctrica, objeto de la presente invención, así como el uso del sistema modular de una red eléctrica, objeto de la presente invención, resultan de utilidad no sólo para caracterizar sistemas de medida y monitorización, sino también para el desarrollo de tareas formativas, de sesiones de entrenamiento y de evaluación de técnicos especialistas en el análisis del estado de las redes. La invención descrita en este apartado está focalizada en aportar soluciones técnicas para caracterizar y mejorar las tecnologías de medida y monitorización de las redes eléctricas de AT. El método de ensayo de un sistema de medida y monitorización de una red eléctrica, objeto de la presente invención, está estructurado en las siguientes etapas principales (ya mencionadas anteriormente) , cuya ejecución hace viable la caracterización de los sistemas de medida y monitorización de forma completa, reproducible y estandarizada. En la Figura 1 e muestra un flujograma con las diferentes etapas y actuaciones que forman parte de una posible forma de realización del método de ensayo. - Primera etapa principal (EP 1) . Configuración del sistema modular mediante la interconexión de los módulos operativos para la simulación de una determinada instalación de AT. - Segunda etapa principal (EP 2) . Generación de defectos y/o fallos y/o ruido en el sistema modular. - Tercera etapa principal (EP 3) . Medida y registro de las mediciones obtenidas mediante el subsistema de sensores y mediante el subsistema de medida, y obtención de una caracterización del sistema de medida y monitorización ante los defectos y/o fallos y/o ruido generados. En la primera etapa principal del método (EP 1) se pueden configurar varias instalaciones físicas ad hoc trifásicas de referencia, adaptadas a las características de las redes reales, para realizar las caracterizaciones. Con estas instalaciones es posible realizar los procesos de caracterización de forma completa, reproducible y estandarizada, al poderse prescindir de las instalaciones de campo o de laboratorio en las que se usan activos reales, o de otras plataformas de ensayo (de laboratorio) , con las que no se pueden conseguir de forma controlada las condiciones de medida de las redes reales. Todo ello sin riesgos eléctricos, al trabajar con niveles de tensión seguros (típicamente menos de 110 V) . Es decir, mediante la aplicabilidad de las etapas ejecutables indicadas en esta primera etapa principal del método (EP 1) , se configura un sistema modular (ad hoc trifásico) , en función del tipo de instalación de AT que se precise, con el que se consiguen las condiciones de medida de las redes reales. Esto es posible gracias al diseño e integración de los elementos siguientes, denominados en esta invención "subsistemas": - el subsistema de módulos operativos; - el subsistema de posicionamiento de defectos y fallos; - el subsistema de inyección de ruido; - el subsistema de generación de señales; - el subsistema de sensores, y; - el subsistema de medida. Las características técnicas de estos subsistemas serán descritas más adelante en la parte explicativa del sistema modular a escala. Dentro de la primera etapa principal (EP 1) , primero (etapa EP 1-1 del método) se configura el subsistema de módulos que definirá el tipo de instalación a simular en función de las necesidades. A continuación (etapa EP 1-2 del método) se configura e integra el resto de subsistemas y se instala el subsistema de medida constituido por los equipos de medida y monitorización a caracterizar. Para la caracterización de las funcionalidades, el posicionamiento de los defectos o fallos y de los sensores se realiza en posiciones estratégicas y definidas del sistema modular, a través del subsistema de posicionamiento de defectos y fallos y del subsistema de sensores respectivamente. La configuración de los subsistemas anteriores y su posicionamiento generalmente están relacionados con el sistema a caracterizar. El uso del sistema modular permite que los sensores utilizados por los sistemas de medida y monitorización puedan ser reales y de varios tipos, por ejemplo, entre otros y de forma no excluyente, capacitivos, transformadores de corriente de alta frecuencia (HFCTs en la literatura inglesa) , antenas (UHF) , transformadores de protección de tensión o corriente, sondas de temperatura, etc. Una vez configurados todos los subsistemas, se ponen en funcionamiento los equipos de medida y monitorización a caracterizar (etapa EP 1-3 del método) . Tras la ejecución de estas tres etapas, el sistema modular está preparado y ya es posible realizar en él la caracterización de los equipos de medida y monitorización. En la segunda etapa principal (EP 2) del método se generan los defectos y/o fallos y/o ruido en el sistema modular. Para la caracterización completa, reproducible y estandarizada de los sistemas, se consideran y seleccionan (etapa EP 2-4 del método) un conjunto definido de pruebas de referencia. Estas pruebas, para la versión más sencilla de la invención, se especifican en la Tabla 1 (ver más adelante) . Las funcionalidades que se pueden caracterizar son, de forma no excluyente, las desarrolladas para detectar defectos de aislamiento (con o sin generación de DPs) , fallos de islamiento, puntos calientes o anomalías en los sistemas de puesta a tierra. Para cada una de las funcionalidades se adaptan y ajustan de forma conveniente los subsistemas que componen el sistema modular (etapa EP 2-5 del método) . Las pruebas de evaluación seleccionadas para un sistema a caracterizar concreto se preparan de forma secuencial. Para la realización de las pruebas se generan en el sistema modular defectos o fallos con o sin señales de ruido (etapa EP 2-6 del método) , empleándose para ello principalmente el subsistema de posicionamiento de defectos y fallos. En este subsistema es posible generar de forma controlada y reproducible, defectos físicos de referencia no relacionados con señales transitorias (por ejemplo, defectos de aislamiento o puntos calientes) , para ser detectados en las mismas condiciones que se detectan en una instalación real (etapa EP 2-6a del método) . Por otro lado, los defectos y fallos asociados con señales transitorias analógicas (por ejemplo, los defectos de aislamiento que generan DPs o los fallos por cortocircuito) , son generados en el subsistema anterior (etapa EP 2-6b del método) , para también ser detectados en las mismas condiciones que se detectan en una instalación real. Estos defectos y fallos se generan inyectando, con adaptación de impedancias, señales analógicas que son producidas por el subsistema de generación de señales con diferentes formas y anchos de banda y de forma reproducible y secuencial. Tabla 1. Pruebas de referencia para las caracterizaciones. Para simular las condiciones de medida propias de las instalaciones reales es preciso crear las mismas condiciones de ruido presentes en éstas. Este requisito se cumple inyectando en el sistema modular señales analógicas de ruido de dos formas diferentes (etapa EP 2-6c del método) . - El ruido aleatorio de fondo se inyecta a través del subsistema de inyección de ruido. Con este subsistema se simula en los puntos de medida, las mismas condiciones de ruido que hay en las instalaciones reales. Es decir, las señales de ruido inyectadas son de la misma naturaleza que las registradas en las instalaciones reales y se miden en las mismas condiciones que en éstas. - Por otro lado, el ruido de tipo pulsante que se propaga de forma conducida por los activos de las instalaciones, se inyecta del mismo modo que las señales transitorias analógicas con las que se simulan defectos y fallos. Por lo que este tipo de ruido es inyectado en el subsistema de posicionamiento de defectos y fallos. Todas las señales analógicas son ajustables en forma, magnitud y espectro en frecuencia y son generadas con el subsistema generador de señales. Las señales de ruido cuando se inyectan se miden superpuestas con las señales de defectos o de fallos. Para una caracterización completa de los sistemas es posible generar (en la etapa EP 2-6 del método) varios defectos y/o fallos coexistentes en diferentes fases y emplazamientos superponiendo además señales de ruido. También es posible generar de forma simultánea más de un defecto en un mismo emplazamiento junto con señales de ruido. Todo lo anterior permite realizar las medidas con las mismas condiciones y casuísticas que en una instalación real. Para realizar las medidas con las mismas condiciones que en una instalación real, todas las señales analógicas relacionadas con defectos, fallos y ruido que se generan han sido previamente medidas en instalaciones reales y posteriormente deconvolucionadas mediante algoritmos parametrizados. En el proceso de deconvolución se considera el efecto de los parámetros físicos de las redes reales y del sistema modular, la adaptación de impedancias y la influencia del tipo y posicionamiento de los sensores. Posteriormente (en la etapa EP 2-7 del método) , el nivel de los defectos y fallos y cuando sea preciso el de las señales de ruido se ajusta en niveles discretos simulando diferentes grados de criticidad y de ruido (interferencias) , lo que hace posible caracterizar de forma completa las funcionalidades mediante la obtención de curvas de comportamiento. Para la caracterización de algunas funcionalidades se requiere el ajuste de la generación de defectos y fallos y/o ruido en varios niveles sucesivos (etapas EP 2-6 y EP 2-7 del método) . Este requerimiento se muestra en el flujograma de la Figura 1 mediante el lazo de realimentación marcado con una línea discontinua. Cada vez que se ejecuta la etapa EP 3-8 (medida y registro de las señales) que se explica a continuación, para cada prueba de caracterización se comprueba si se ha realizado el ajuste de todos los niveles de los defectos o fallos o señales de ruido, esto se muestra en la Figura 1 con el rombo de decisión de la pregunta 1 (P1) : se han realizado las medidas y registros con todos los niveles de los defectos o fallos o ruido? Además, como las funcionalidades son evaluadas de forma secuencial, se ha añadido el bucle de realimentación mostrado con una línea de puntos. De este modo, si la respuesta a la pregunta P2 es afirmativa, se formula en el siguiente rombo de decisión la pregunta 2 (P2) : se han realizado todas las pruebas? Cada vez que se ejecutan las etapas EP 2-5, EP 2-6 y EP 2-7 para cada prueba, el sistema modular queda preparado para poder realizar las medidas y registro de las señales en la siguiente etapa principal (EP 3) . En la tercera etapa principal del método (EP 3) se realiza la evaluación de las funcionalidades de forma secuencial. De este modo se llevan a cabo las medidas con los sistemas de medida y monitorización (en la etapa EP 3-8 del método) , empleando al menos un subsistema de sensores. Posteriormente, las medidas son registradas, procesadas y analizadas. Finalmente (en la etapa EP 3-9 del método) se realiza la evaluación del sistema de medida y monitorización y se elabora el correspondiente informe de resultados. Las interacciones entre las tres etapas principales del método se han indicado en la Figura 1 mediante las líneas de punto y trazo. Breve descripción de las figuras Se describen aquí de forma breve una serie de figuras, de ejemplos no limitativos, que ayudan a comprender mejor la invención: La Figura 1: muestra un flujograma con diferentes etapas y actuaciones que forman parte de una posible forma de realización del método de ensayo de un sistema de medida y monitorización de una red eléctrica. La Figura 2a muestra una vista esquemática de una posible forma de realización de un módulo de cable aislado del subsistema de módulos operativos. La Figura 2b muestra una vista esquemática de una posible forma de realización de un módulo de cable aéreo del subsistema de módulos operativos. La Figura 2c muestra una vista esquemática de una posible forma de realización de un módulo de empalmes rectos del subsistema de módulos operativos. La Figura 2d muestra una vista esquemática de una posible forma de realización de un módulo de empalmes con cruzamiento de pantalla del subsistema de módulos operativos. La Figura 2e muestra una vista esquemática de una posible forma de realización de un módulo GIS del subsistema de módulos operativos. La Figura 2f muestra una vista esquemática de una posible forma de realización de un módulo de celdas de distribución del subsistema de módulos operativos. La Figura 2g muestra una vista esquemática de una posible forma de realización de un módulo de transformador del subsistema de módulos operativos. La Figura 2h muestra una vista esquemática de una posible forma de realización de un módulo de máquina rotativa del subsistema de módulos operativos. La Figura 2i muestra una vista esquemática de una posible forma de realización de un módulo auxiliar de conexión del subsistema de módulos operativos. La Figura 3 muestra una vista esquemática de una posible forma de realización de cuatro bloques de generación de un defecto o fallo del subsistema de posicionamiento de defectos y fallos. La Figura 4 muestra una vista esquemática de una posible forma de realización de un subsistema de inyección de ruido, conectado a un subsistema generador de señales analógicas. La Figura 5a muestra una vista esquemática de detalle, en perspectiva, de una posible forma de realización de un bloque de inyección de ruido del subsistema de inyección de ruido. La Figura 5b muestra una vista esquemática de detalle, lateral, de una posible forma de realización de un bloque de inyección de ruido del subsistema de inyección de ruido. La Figura 6 muestra una vista esquemática de un sistema de cable aislado de una línea de distribución de AT conectado en los extremos a una subestación GIS. La Figura 7 muestra una vista esquemática de un ejemplo de subsistema de módulos que permite simular un sistema de cable aislado de una línea de distribución de AT conectado en los extremos a una subestación GIS. La Figura 8 muestra una vista esquemática de un sistema de cable aislado de una línea de transporte de AT conectado en los extremos a una subestación GIS. La Figura 9 muestra una vista esquemática de un ejemplo de subsistema de módulos que permite simular un sistema de cable aislado de una línea de transporte de AT conectado en los extremos a una subestación GIS. La Figura 10 muestra una vista esquemática de un sistema de distribución de MT en anillo con cuatro centros de transformación (CTs) , cuatro puentes de transformador y cuatro transformadores. La Figura 11 muestra una vista esquemática de un ejemplo de subsistema de módulos que permite simular un sistema de distribución de MT en anillo con cuatro CTs, cuatro puentes de transformador y cuatro transformadores. La Figura 12 muestra una representación conjunta y esquemática de un ejemplo de los tres subsistemas con los que es posible simular los tres tipos de instalación, en la versión más sencilla de la invención. La Figura 13 muestra una vista esquemática de un ejemplo de sistema modular completo que permite simular un sistema de cable aislado de una línea de distribución de AT conectado en los extremos a una subestación GIS. La Figura 14 muestra unas gráficas con resultados de la prueba de sensibilidad frente al ruido. La Figura 15 muestra un gráfico con los resultados de la prueba de capacidad de discriminar la fase/s afectada/s por uno o más defectos de aislamiento. Se presenta una representación en 3D de la magnitud de los pulsos registrados de forma simultánea por la terna de sensores del inicio del sistema de cable. La Figura 16a muestra, para la fase R de una red trifásica, los resultados de la prueba de capacidad de detectar y diferenciar la presencia de los defectos de aislamiento. Se presentan diagramas 3D para la detección y separación de defectos, obteniéndose patrones individuales. La Figura 16b muestra, para la fase S de una red trifásica, los resultados de la prueba de capacidad de detectar y diferenciar la presencia de los defectos de aislamiento. Se presentan diagramas 3D para la detección y separación de defectos, obteniéndose patrones individuales. La Figura 17 muestra gráficos con los resultados de la prueba de capacidad de localizar uno o más defectos situados en emplazamientos diferentes o en el mismo. Se muestran los diagramas de localización de los defectos detectados en dos fases. La Figura 18 muestra gráficos con los resultados de la prueba de capacidad de discriminar diferentes defectos localizados en un mismo emplazamiento. Se presenta el resultado de la discriminación de dos defectos localizados en un mismo punto. La Figura 19 muestra gráficos con los resultados de la prueba de capacidad de identificar el tipo de defecto. Se muestra el resultado de la identificación automática realizada por una herramienta de inteligencia artificial, para tres defectos asociados con sus respectivos patrones. La Figura 20 muestra gráficos con los resultados de la prueba de capacidad de identificar el elemento defectuoso donde se encuentra cada defecto. Se presenta una tabla asociada donde se indican los resultados obtenidos para todos los factores analizados y el resultado de la identificación. Descripción detallada Se procede a continuación a hacer una descripción de al menos una posible forma de realización del sistema modular de una red eléctrica y del método de ensayo de un sistema de medida y monitorización de una red eléctrica. En cuanto al método de la presente invención, en la Figura 1 se muestra un flujograma con diferentes etapas y actuaciones que forman parte de una posible forma de realización del método de ensayo de un sistema de medida y monitorización de una red eléctrica. - Primera etapa principal (EP 1) . Configuración y preparación del sistema modular a escala para la simulación de una determinada instalación de AT. - Segunda etapa principal (EP 2) . Generación de defectos y/o fallos y/o ruido en el sistema modular. - Tercera etapa principal (EP 3) . Medida y registro de las mediciones obtenidas mediante el subsistema de sensores y mediante el subsistema de medida, y obtención de una caracterización del sistema de medida y monitorización ante los defectos y/o fallos y/o ruido generados. El sistema modular de una red eléctrica, objeto de la presente invención, comprende un subsistema de módulos operativos (100) , que a su vez comprende una pluralidad de módulos operativos (101) . En las Figuras 2a a 2i, se muestran diferentes módulos operativos (101) de este subsistema de módulos operativos (100) . Así pues, en la versión más sencilla de la invención, el subsistema de módulos operativos (100) puede estar formado por una combinación de, entre otros, los módulos que se indican a continuación: Módulo de cable aislado (101a) , mostrado esquemáticamente en la Figura 2a; Módulo de cable aéreo (101b) , mostrado esquemáticamente en la Figura 2b; Módulo de empalmes rectos (101c) , mostrado esquemáticamente en la Figura 2c; Módulo de empalmes con cruzamiento de pantallas (101d) , mostrado esquemáticamente en la Figura 2d; Módulo GIS (101e) (módulo de subestación aislada con gas) , mostrado esquemáticamente en la Figura 2e; Módulo de celdas de distribución (101f) , mostrado esquemáticamente en la Figura 2f; Módulo de transformador (101g) , mostrado esquemáticamente en la Figura 2g; Módulo de máquina rotativa (101h) , mostrado esquemáticamente en la Figura 2h; Módulo auxiliar de conexión (101i) , mostrado esquemáticamente en la Figura 2i, donde este módulo auxiliar de conexión (101i) permite conectar diferentes activos o módulos operativos (101) para conseguir los propósitos de adaptación de impedancias y de condiciones adecuadas de medida. Por ejemplo, los de unión cable-GIS, cable-celda de AT y cable-transformador. El sistema modular de una red eléctrica, objeto de la presente invención, comprende también un subsistema de posicionamiento de defectos y fallos (200) , el cual comprende al menos un bloque de generación (201) de un defecto o fallo. En la Figura 3 se muestran, a modo de ejemplo, cuatro elementos o bloques de generación de un defecto o fallo (201) distribuidos e instalados en un tramo de un subsistema de módulos operativos (100) . El sistema modular de una red eléctrica, objeto de la presente invención, comprende también un subsistema de inyección de ruido (300) , que a su vez comprende al menos un bloque de inyección de ruido (301) . En la Figura 4 se muestra un ejemplo, para la versión más sencilla de la invención, de un bloque del subsistema de inyección de ruido (301) aleatorio instalado en un tramo de un subsistema de módulos operativos (100) . En la Figura 5a y en la Figura 5b se muestra en detalle el bloque de inyección de ruido (301) de este subsistema de inyección de ruido (300) . El sistema modular de una red eléctrica, objeto de la presente invención, comprende también un subsistema de generación de señales (400) . Este subsistema está conectado al subsistema de posicionamiento de defectos y fallos (200) y al subsistema de inyección de ruido (300) , y está configurado para: - generar y enviar señales al al menos un bloque de generación (201) de un defecto o fallo para la introducción de al menos una señal de defecto o fallo o ruido pulsante en el subsistema de módulos operativos (100) , y; - generar y enviar señales al al menos un bloque de inyección de ruido (301) para la inyección de al menos una señal de ruido aleatorio en el subsistema de módulos operativos (100) ; En la Figura 4 se muestra, mediante una línea de raya discontinua, un ejemplo de conexión del subsistema de generación de señales (400) con uno de los bloques de generación (201) de un defecto o fallo o ruido pulsante distribuidos del subsistema de posicionamiento de defectos y fallos (200) . En la Figura 4 se muestra también, mediante una línea de puntos, un jemplo de conexión del subsistema de generación de señales (400) con uno de los bloques de inyección de ruido (301) aleatorio distribuidos del subsistema de inyección de ruido (300) . El sistema modular de una red eléctrica, objeto de la presente invención, comprende también un subsistema de sensores (500) . Se trata de los sensores (501) configurados para medir y/o monitorizar variables eléctricas, térmicas, etc., en el subsistema de módulos operativos (100) . En la Figura 5a y en la Figura 5b se muestra un ejemplo de subsistema de sensores (500) , ubicado en el interior del subsistema de inyección de ruido (300) . Está constituido por tres sensores (501) de tipo HFCT (transformador de corriente de alta frecuencia) . Estos sensores pueden ser sustituidos o complementados por otros, por ejemplo y de forma no excluyente por antenas (por ejemplo, antenas UHF (ultra alta frecuencia) ) , transformadores de protección de tensión o corriente y sondas de temperatura. A continuación se presenta un ejemplo de aplicación práctica del método propuesto en esta invención, para una mejor comprensión del mismo en cuanto a la configuración y preparación del sistema modular, la preparación de las pruebas de caracterización y la evaluación de las funcionalidades de los sistemas de medida y monitorización. Para la caracterización y comparación de los sistemas de medida y monitorización, todas las pruebas deben hacerse en condiciones controladas de ruido eléctrico, por lo que se recomienda su realización en laboratorios apantallados o en cámaras anecoicas. En la ejecución de la primera etapa principal del método (EP 1) , para la configuración del sistema modular se consideran fundamentalmente los siguientes aspectos técnicos, con el fin de reproducir las mismas condiciones de operatividad y medida de las redes reales: - Selección y disposición de los módulos operativos (101) necesarios para la configuración de un subsistema de módulos operativos (100) representativo de un determinado tipo de red. - Indicación de los puntos donde se van a producir defectos y/o fallos y donde se van a medir. - Instalación y configuración del resto de subsistemas (200, 300, 400, 500, 600) . - Definición de la forma de generar los defectos y fallos y las señales de ruido. A modo de ejemplo, para la versión más sencilla de la invención, se presentan a continuación tres instalaciones que pueden ser simuladas mediante los correspondientes tres subsistemas de módulos. Los tres subsistemas se configuran mediante módulos operativos (101) intercambiables. • Instalación 1: Sistema de cable aislado de una línea de distribución de AT, conectada en ambos extremos a una subestación GIS (A) , con dos empalmes rectos (B) y con una longitud equivalente de al menos 1.500 m (ver la Figura 6) . El subsistema de módulos operativos (100) para simular esta instalación está compuesto por dos módulos de GIS (101e) , tres módulos de cable aislado (101a) , dos módulos de empalmes rectos (101c) y dos módulos de conexión auxiliar (101i) (para unión cable-GIS) (ver la Figura 7) . • Instalación 2: Sistema de cable aislado de una línea de transporte de AT conectada en ambos extremos a una GIS (A) , con disposición de cruzamiento de pantallas en dos empalmes (C) y con una longitud equivalente total de al menos 1.500 m (ver la Figura 8) . El subsistema de módulos para simular esta instalación se obtiene cambiando en el anterior, los módulos de empalmes rectos (101c) por módulos de empalmes con cruzamiento de pantallas (101d) . Es decir, el subsistema queda configurado con los mismos dos módulos de GIS (101e) , tres módulos de cable aislado (101a) y dos módulos de conexión auxiliar (101i) (para unión cable-GIS) de la instalación anterior. Quedando la nueva configuración en los puntos intermedios implementada con dos módulos de empalmes con cruzamiento de pantallas (101d) (ver la Figura 9) . • Instalación 3: Sistema de distribución de MT en anillo con cuatro CTs (D) que alimentan a cuatro transformadores (E) y con una longitud total de al menos 2.000 m (ver la Figura 10) . El subsistema de módulos para simular esta instalación se obtiene cambiando en el primero, los módulos de empalmes rectos (101c) , módulos de GIS (101e) y módulos auxiliares de conexión (101i) (de unión cable-GIS) , por módulos de celdas de distribución (101f) , módulos auxiliares de conexión (101i) (de unión cable-transformador) y módulos de transformador (101g) . Es decir, el subsistema queda configurado con los mismos tres módulos de cable aislado (101a) (más uno adicional) , e incluye cuatro módulos nuevos de celdas de distribución (101f) , cuatro módulos auxiliares de conexión (101i) (de unión cabletransformador) y cuatro módulos de transformador (101g) (ver la Figura 11) . La configuración del sistema de distribución de MT puede ser completada, por ejemplo, con una salida desde uno de los transformadores a una máquina rotativa de MT. Todas las configuraciones anteriores pueden ser completadas con una entrada y/o salida de sistema de cable aéreo. Además, mediante la combinación de módulos adicionales es posible configurar, además de las instalaciones descritas, otras más complejas y/o más extensas. Todos los módulos que constituyen los subsistemas de módulos operativos (101) están diseñados para poder instalar y conectar, sobre la base de éstos últimos, el resto de subsistemas con los que se constituyen los sistemas modulares a escala finales. Para apreciar el carácter modular y flexible del subsistema de módulos, en la versión más sencilla de la invención, en la Figura 12 se muestran de forma conjunta y esquemática los tres subsistemas descritos con anterioridad. Con la combinación adecuada de módulos operativos (101) es posible simular cualquiera de las tres instalaciones, lo que confiere al diseño sencillez y versatilidad. Con la línea discontinua se especifican los módulos operativos (101) que se precisan para simular el sistema de distribución en AT (instalación 1) . Con la línea de puntos, los necesarios para simular el sistema de transporte en AT (instalación 2) . Y finalmente, con la línea de dos puntos y raya los necesarios para simular el sistema de distribución de MT en anillo (instalación 3) . Para exponer un modo de realización de la invención se procede a caracterizar una serie de funcionalidades de un sistema de medida y monitorización. Este sistema está desarrollado para la supervisión del estado de los dieléctricos en las redes de MT y AT. Las caracterizaciones se realizan con el sistema operando en la línea de distribución de AT de la instalación 1 presentada con anterioridad (ver las Figuras 6 y 7) . A continuación, se muestra el desarrollo de las etapas especificadas en la primera etapa principal del método (EP 1) (Configuración y preparación del sistema modular mediante la interconexión de los subsistemas) . - En la etapa 1 (EP 1-1) se configura el subsistema de módulos que se muestra en la Figura 7, que se corresponde con la línea de distribución de AT a monitorizar. - En la etapa 2 (EP 1-2) se integran el resto de subsistemas resultando el sistema modular que se muestra en la Figura 13. De este modo, los subsistemas integrantes de la instalación son el subsistema de módulos (100) , el subsistema de posicionamiento de defectos y fallos (200) , el subsistema de generación de señales (400) , el subsistema de inyección de ruido aleatorio (300) y el subsistema de sensores (500) . Para la realización de las pruebas de caracterización se ha considerado que en la instalación hay tres defectos de aislamiento que generan actividad de DP. Estos defectos se posicionan en dos fases y emplazamientos diferentes. La ubicación se muestra en la Figura 13 mediante puntos negros. Los defectos se producen en el subsistema de posicionamiento de defectos y fallos. Este ejemplo puede hacerse extensible a la inclusión de más tipos de defecto o incluso de algún fallo de aislamiento. En este ejemplo, la actividad de DP asociada a los tres defectos se genera con el subsistema de generación de señales. Este subsistema está conectado con el de posicionamiento de defectos y fallos. Para la realización de las medidas, el sistema de medida y monitorización a caracterizar emplea sensores no invasivos del tipo HFCT, estos sensores se posicionan en las puestas a tierra del sistema de cable. En este ejemplo de aplicación, los puntos de pedida se posicionan en ambos extremos del sistema de cable. Los sensores (501) empleados constituyen el subsistema de sensores (500) y se encuentran dentro del subsistema de inyección de ruido aleatorio (300) , con el fin de simular las mismas condiciones de medida que se producen en las instalaciones reales. Una vez integrados todos los subsistemas se procede a instalar el subsistema de medida (600) , que está formado por las unidades de adquisición del sistema de medida y monitorización que va a ser caracterizado. La salida de los sensores (501) del subsistema de sensores (500) se conecta a la entrada de las unidades de adquisición (601) del subsistema de medida (600) . - En la etapa 3 (EP 1-3) se realiza la puesta en funcionamiento del sistema de medida y monitorización. Tras la ejecución de estas tres etapas, el sistema modular está preparado y es posible realizar en él la caracterización del sistema de medida y monitorización. A continuación se muestra el desarrollo de las etapas especificadas en la segunda etapa principal del método (EP 2) (generación de defectos y/o fallos y/o ruido en el sistema modular) . - En la primera etapa de esta segunda etapa principal (EP 2) , (etapa EP 2-4 del método) (ver la Figura 1) , se selecciona un conjunto de pruebas de referencia. Las pruebas se especifican, de forma no excluyente, en la Tabla 1 mostrada anteriormente. Para la exposición de este modo de realización de la patente, donde se caracterizan las funcionalidades de un sistema que supervisa el estado de los dieléctricos mediante la medida de DP, se han considerado y seleccionado las siguientes pruebas. • Capacidad de detectar las DPs. Análisis de sensibilidad con medida en una posición. • Capacidad de discriminar la fase/s afectada/s por uno o más defectos de aislamiento. • Capacidad de detectar y diferenciar la presencia de los defectos de aislamiento. • Capacidad de localizar uno o más defectos situados en emplazamientos diferentes o en el mismo. • Capacidad de discriminar diferentes defectos localizados en un mismo emplazamiento. • Capacidad de identificar el tipo de defecto. • Capacidad de identificar el elemento defectuoso donde se encuentra cada defecto. - Una vez seleccionadas las pruebas, a continuación (en la etapa EP 2-5 del método) se adaptan y ajustan todos los subsistemas del sistema modular. • Para la ejecución de las pruebas se posicionaron en el sistema modular 8 elementos distribuidos que constituyen el subsistema de posicionamiento de defectos y fallos (200) (ver la Figura 13) . Los tres defectos de aislamiento se han generado en los tres elementos que se indican con puntos negros, al principio del cable (P1) y en el segundo empalme (P2) (ver la Figura 13 y la Tabla 2 a continuación) . • Para crear los defectos, las señales de DP se han generado con el subsistema de generación de señales (400) (ver la Figura 13) . Con este subsistema también se han generado las señales de ruido impulsional necesarias. • En cada punto de medida se colocan tres sensores HFCT (uno por cada fase) (501) abrazando los conductores de puesta a tierra del sistema de cable (ver la Figura 13) . • Para generar las mismas condiciones de medida que en las instalaciones reales, en los puntos de pedida se han ubicado dos bloques del subsistema de inyección de ruido aleatorio (300) . Los sensores (501) están embebidos en los dos bloques de este subsistema. A continuación (en la etapa EP 2-6 del método) , se preparan los defectos con las señales de ruido impulsional (etapa EP 2-6b) y las señales de ruido aleatorio (etapa EP 2-6c) . El ruido aleatorio se inyecta directamente en el subsistema de inyección de ruido aleatorio (300) . Los tipos de defecto, su posición, la fase afectada, los elementos defectuosos, el valor de carga de las DP, los niveles de ruido y las pruebas de referencia donde interviene cada defecto e muestran en la Tabla 2. Los dos tipos de ruido utilizados en las pruebas se muestran en las dos últimas filas. Tabla 2. Defectos, posición, fase, elemento defectuoso, carga de las DP y pruebas donde se utilizan. (*) Valor porcentual del nivel generado tomando como referencia un valor de las DP de 200 pC. (**) En la prueba 1, el nivel de este ruido se ajusta en los siguientes porcentajes: 5 %, 50 %, 100 % y 200 %. A continuación (en la etapa EP 2-7 del método) se procede a ajustar el nivel de los defectos y de las señales de ruido. Por ejemplo, para la realización de la prueba 1 (análisis de sensibilidad) , se genera un defecto con un valor constante de carga junto con el ruido #1 con diferentes niveles que se aplican en 4 cuatro pasos sucesivos, ver en el flujograma de la Figura 1 el lazo de realimentación marcado con la línea discontinua donde se formula la pregunta P1 explicada anteriormente. Para sintetizar esta exposición de un modo de realización de la patente, solamente se ha hecho el escalado de ruido en la prueba 1. A continuación, se muestra el desarrollo de las etapas especificadas en la tercera etapa principal del método (EP 3) (Medida y registro de las mediciones obtenidas mediante el subsistema de sensores y mediante el subsistema de medida, y obtención de una caracterización del sistema de medida y monitorización ante los defectos y/o fallos y/o ruido generados) . En la primera etapa de esta tercera etapa principal (EP 3) (que se corresponde con la etapa EP 3-8 del método) , se ejecuta la primera prueba de caracterización. Una vez acabado el escalado del ruido de la primera prueba se procede a realizar de forma secuencial el resto de pruebas (ver en el flujograma de la Figura 1 el lazo de realimentación marcado con la línea de puntos donde se formula la pregunta P2 explicada anteriormente) . Para cada prueba se hacen medidas de DP, se registran los datos y se analizan los resultados. Finalmente (en la etapa EP 3-9 del método) se realiza la evaluación final y el informe de resultados. Ejecución de la prueba 1 y análisis de resultados. En la prueba de análisis de sensibilidad frente al ruido, se genera el defecto interno tipo #1 con los niveles de ruido que se especifican en la Tabla 2. Con el sistema de medida a caracterizar se usa una herramienta de filtrado de ruido aleatorio basada en un filtro wavelet. Los resultados de las medidas realizadas con el sensor posicionado en la fase donde se genera el defecto se muestran en la Figura 14. En la primera columna se indican los niveles de ruido, en la segunda el patrón resuelto en fase obtenido en la medida una vez aplicado el filtro. En la tercera columna se muestra una captura de un periodo de la señal de referencia de tensión en el dominio del tiempo. Se puede observar que con un ruido del 200 % ya no es posible la detección del defecto. Para la ejecución de las pruebas 2, 3, 4, 5, 6 y 7 se generan de forma simultánea los defectos internos tipo cavidad #2 y #4 y el defecto interno tipo superficial #3 especificados en la Tabla 2, con los ruidos y niveles de ruido que se indican. Ejecución de la prueba 2 y análisis de resultados. En la prueba de capacidad de discriminar la fase/s afectada/s por uno o más defectos de aislamiento, con el sistema de medida a caracterizar se utiliza una herramienta de procesado que permite detectar las fases con defecto. Su funcionamiento está basado en el análisis de la magnitud de los pulsos registrados de forma simultánea por una terna de sensores (501) , posicionados en un mismo punto de la instalación. Los pulsos generados en un defecto posicionado en una fase se pueden ver en las otras dos con menos magnitud por el efecto de "cross-taiking. Las magnitudes de los pulsos se representan en un diagrama 3D, en el que cada eje se corresponde con una fase. El resultado de las medidas realizadas con la terna de sensores posicionada al inicio del sistema de cable se muestra en la Figura 15. En la imagen se ven tres o cuatro agrupaciones de pulsos (clusters) , uno o dos en la fase R (no está claro) , uno en la S y otro en el centro del iagrama. Con el resultado obtenido se puede indicar que las fases afectadas por posibles defectos de aislamiento son la R (probablemente con dos defectos) y la S (probablemente con 1) . El cluster del centro generalmente se asocia a las señales de ruido impulsional. Ejecución de la prueba 3 y análisis de resultados. Para la prueba de capacidad de detectar y diferenciar la presencia de los defectos de aislamiento, el sistema a caracterizar tiene una herramienta de procesado de los pulsos que, mediante el análisis de su forma de onda y de su espectro en frecuencia, permite detectar y separar los defectos de aislamiento. Los pulsos generados en un defecto tienen una forma de onda similar y generalmente cuando son medidos ésta difiere de las formas de los pulsos de otros defectos. Para cada pulso registrado se representa en un diagrama 3D el valor de tres parámetros relacionados con su forma de onda y espectro en frecuencia. En las Figuras 16a y 16b se muestra el resultado obtenido con la medida realizada con los sensores de las fases R y S, posicionados al principio del sistema de cable. A la izquierda (sensor de la fase R) se pueden visualizar tres clusters (ver la Figura 16a) y a la derecha (sensor de la fase S) dos (ver la Figura 16b) . Seleccionando los pulsos correspondientes a cada cluster se obtienen los patrones individuales representados. Con el resultado obtenido se puede indicar que en la fase R hay dos defectos, uno interno de tipo cavidad (cluster #1) y otro interno de tipo superficial (cluster #2) . Además, se ha detectado una fuente de ruido impulsional (cluster #3) . Para la fase S se ha detectado un defecto interno tipo cavidad (cluster #4) y el mismo ruido (cluster #5) . Ejecución de la prueba 4 y análisis de resultados. Para la prueba de capacidad de localizar defectos situados en emplazamientos diferentes o en el mismo, el sistema de medida a caracterizar tiene una herramienta de procesado de las señales que, mediante el análisis de los tiempos de llegada de los pulsos a sensores ubicados en puntos diferentes de la misma fase, es posible conocer el emplazamiento de los defectos. La posición de los defectos se visualiza en un diagrama de localización. En la Figura 17 se muestra el resultado obtenido con la medida realizada con los dos sensores de la fase R y con los dos de la S. Con los resultados obtenidos se puede indicar que hay al menos un defecto en la fase R posicionado al principio del sistema de cable. El defecto o defectos de la fase R pueden estar tanto en la GIS como en la terminación del cable. También se puede indicar que hay al menos un defecto en la fase S, posicionado en el segundo empalme. Ejecución de la prueba 5 y análisis de resultados. En la prueba de capacidad de discriminar defectos localizados en un mismo emplazamiento, combinando las herramientas de localización y de separación de defectos, es posible la discriminación de los mismos. Seleccionando los pulsos localizados en la fase R (ver la parte superior izquierda de la Figura 18) y aplicándoles la herramienta de separación (ver la parte media izquierda de la Figura 18) , se obtienen tres clusters y patrones (ver la parte inferior izquierda de la Figura 18) . Para la fase S, se obtienen dos clusters y dos patrones (ver la parte inferior derecha de la Figura 18) . Con el resultado obtenido se han discriminado y corroborado los dos defectos internos de la fase R (clusters #1 y #2) localizados en el mismo emplazamiento. También se corrobora la presencia del único defecto interno de la fase S. Ejecución de la prueba 6 y análisis de resultados. Para la prueba de capacidad de identificar el tipo de defecto, el sistema a caracterizar tiene una herramienta de inteligencia artificial que, mediante el análisis de los patrones individuales, identifica de forma automática los defectos de aislamiento asociados. En la Figura 19 se presenta el resultado obtenido tras el análisis de los cinco patrones (#1, #2, #3, #4, #5) que se obtuvieron en la prueba 3 (detección y diferenciación de defectos) (ver la Figura 16a y la Figura 16b) . Para los patrones #1 y #4 se identifica un defecto interno tipo cavidad (C) , para el #2 un defecto interno tipo superficial (IS) y para los #3 y #5 ruido impulsional (RI) . Ejecución de la prueba 7 y análisis de resultados. En la prueba de capacidad de identificar el elemento defectuoso donde se encuentra cada defecto, es de utilidad el uso de una herramienta del sistema de medida con la que se analiza la polaridad de los pulsos. El análisis de la polaridad sirve para definir si el elemento defectuoso se encuentra a un lado u otro del punto de medida. Para determinar el elemento defectuoso con defecto, además de analizar la polaridad de los pulsos, se analiza la forma del patrón, su defecto asociado y el posicionamiento resultante de la prueba 4. En la Figura 20 se presenta un resumen con toda la información considerada, donde en la primera columna se indican los defectos (D1, D2 y D3) , en la segunda la polaridad de los pulsos (positiva "+" o negativa "-") , en la tercera los patrones correspondientes, en la cuarta el tipo de defecto asociado (cavidad (C) , superficial interno (SI) , ...) y en la quinta su posicionamiento (posición en el circuito (P1, P2, ...) y fase (R, S o T) ) . El resultado obtenido en la identificación de los elementos defectuosos: GIS (GI) , terminación de cable (TC) o empalme (EM) , se muestra en la sexta columna de la Figura 20. Una vez ejecutadas todas las pruebas se procede a realizar el informe final. Para este ejemplo de aplicación, este informe se presenta en la Tabla 3 a modo de resumen, indicándose los resultados obtenidos en cada prueba. Tabla 3. Informe final.
Publicaciones:
ES2961406 (11/03/2024) - A1 Solicitud de patente con informe sobre el estado de la técnica
Eventos:
En fecha 29/12/2023 se realizó Registro Instancia de Solicitud
En fecha 29/12/2023 se realizó Admisión a Trámite
En fecha 29/12/2023 se realizó Aceptación Tramitación CAP
En fecha 29/12/2023 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 08/01/2024 se realizó Superado examen de oficio
En fecha 19/02/2024 se realizó Realizado IET
En fecha 04/03/2024 se realizó 1109P_Comunicación Traslado del IET
En fecha 11/03/2024 se realizó Publicación Solicitud
En fecha 11/03/2024 se realizó Publicación Folleto Solicitud con IET (A1)
Pagos:
30/11/2023 - Pago Tasas IET
+ ES-2961406_A11. Sistema modular de una red eléctrica caracterizado por que comprende: • un subsistema de módulos operativos (100) , que comprende una pluralidad de módulos operativos (101) configurados para reproducir el funcionamiento de una red eléctrica; • un subsistema de posicionamiento de defectos y fallos (200) conectado al subsistema de módulos operativos (100) , donde el subsistema de posicionamiento de defectos y fallos (200) comprende al menos un bloque de generación (201) de un defecto o fallo en el subsistema de módulos operativos (100) ; • un subsistema de inyección de ruido (300) conectado al subsistema de módulos operativos (100) , donde el subsistema de inyección de ruido (300) comprende al menos un bloque de inyección de ruido (301) configurado para inyectar una señal de ruido en el subsistema de módulos operativos (100) ; • un subsistema de generación de señales (400) conectado al subsistema de posicionamiento de defectos y fallos (200) y al subsistema de inyección de ruido (300) , donde el subsistema de generación de señales (400) está configurado para: generar y enviar señales al al menos un bloque de generación (201) de un defecto o fallo para la introducción de al menos una señal de defecto o fallo en el subsistema de módulos operativos (100) , y; generar y enviar señales al al menos un bloque de inyección de ruido (301) para la inyección de al menos una señal de ruido aleatorio en el subsistema de módulos operativos (100) ; • un subsistema de sensores (500) conectado al subsistema de módulos operativos (100) , donde el subsistema de sensores (500) comprende una pluralidad de sensores (501) configurados para monitorizar y/o realizar medidas en el subsistema de módulos operativos (100) , y; • un subsistema de medida (600) conectado al subsistema de sensores (500) , donde el subsistema de medida (600) comprende al menos una unidad de adquisición de datos (601) configurada para registrar y/o procesar y/o mostrar los datos relativos a mediciones de los sensores (501) . 2. Sistema modular de una red eléctrica, según la reivindicación 1, caracterizado por que el subsistema de módulos operativos comprende uno o más de cada uno de al menos los siguientes módulos operativos (101) : a. un módulo de cable aislado (101a) ; b. un módulo de cable aéreo (101b) ; c. un módulo de empalmes rectos (101c) ; d. un módulo de empalmes con cruzamiento de pantallas (101d) ; e. un módulo GIS (101e) ; f. un módulo de celdas de distribución (101f) ; g. un módulo de transformador (101 g) ; h. un módulo de máquina rotativa (101 h) , y; i. un módulo auxiliar de conexión (101i) entre módulos operativos (101) . 3. Método de ensayo de un sistema de medida y monitorización de una red eléctrica, que comprende hacer uso de un sistema modular de una red eléctrica según cualquiera de las reivindicaciones anteriores, caracterizado por que comprende: a. configurar (EP1) el sistema modular mediante la interconexión de los subsistemas (100, 200, 300, 400, 500, 600) ; b. generar (EP2) defectos y/o fallos y/o ruido en el sistema modular, y; c. medir y registrar (EP3) las mediciones obtenidas mediante el subsistema de sensores (500) y mediante el subsistema de medida (600) , obteniendo una caracterización del sistema de medida y monitorización compuesto por el subsistema de sensores (500) y/o el subsistema de medida (600) ante los defectos y/o fallos y/o ruido generados. 4. Método de ensayo de un sistema de medida y monitorización de una red eléctrica según la reivindicación 3, caracterizado por que la etapa de configuración (EP1) del sistema modular comprende: a. conectar entre sí los distintos módulos operativos (101) del subsistema de módulos operativos (100) ; b. conectar el al menos un bloque de generación (201) de un defecto o fallo a al menos un punto del subsistema de módulos operativos (100) ; c. conectar el al menos un bloque de inyección de ruido (301) a al menos un punto del subsistema de módulos operativos (100) ; d. conectar el subsistema de generación de señales (400) al al menos un bloque de generación (201) de un defecto o fallo y al al menos un bloque de inyección de ruido (301) ; e. conectar los sensores (501) a distintos puntos del subsistema de módulos operativos (100) ; f. conectar el subsistema de medida (600) a los sensores (501) , y; g. poner en funcionamiento los distintos módulos operativos (101) . 5. Método de ensayo de un sistema de medida y monitorización de una red eléctrica según la reivindicación 3 ó 4, caracterizado por que la etapa de generar (EP2) defectos y/o fallos y/o ruido en el sistema modular comprende: a. seleccionar un conjunto de ensayos de referencia; b. ajustar cada uno de los subsistemas (100, 200, 300, 0 400, 500, 600) a los ensayos seleccionados; c. generar, mediante el subsistema de generación de señales (400) y mediante el al menos un bloque de generación (201) de un defecto o fallo, al menos un defecto o fallo y/o señal de ruido pulsante en el subsistema de módulos operativos (100) ; d. generar, mediante el subsistema de generación de señales (400) y mediante el al menos un bloque de inyección de ruido (301) , al menos una señal de ruido aleatorio en el subsistema de módulos operativos (100) , y; e. ajustar el nivel de señal de defecto o fallo y/o el nivel de señal de ruido. 6. Método de ensayo de un sistema de medida y monitorización de una red eléctrica según cualquiera de las reivindicaciones 3 a 5, caracterizado por que la etapa de medir y registrar (EP3) las mediciones obtenidas mediante el subsistema de sensores (500) y mediante el subsistema de medida (600) , obteniendo una caracterización del sistema de medida y monitorización compuesto por el subsistema de sensores (500) y el subsistema de medida (600) ante los defectos y/o fallos y/o ruido generados comprende: a. realizar mediciones con el subsistema de sensores (500) y con el subsistema de medida (600) , y; b. evaluar las medidas obtenidas mediante el subsistema de sensores (500) y mediante el subsistema de medida (600) y obtener un informe de resultados.
Los productos y servicios protegidos por este registro son:
G01R 31/00 - H02J 13/00 - G01R 17/00 - G01R 31/12
Descripciones:
+ ES-2961406_A1 Sistema modular de una red eléctrica y método de ensayo de un sistema de medida y monitorización de una red eléctrica Objeto de la invención La presente invención se refiere a un sistema modular de una red eléctrica que permite reproducir, a escala de laboratorio, el funcionamiento de una red eléctrica a escala industrial, y reproducir igualmente diferentes condiciones operativas de la red eléctrica, en las cuales pueden presentarse defectos en los diferentes elementos que constituyen la red eléctrica, y fallos de funcionamiento (por ejemplo cortocircuitos en diferentes puntos de la red eléctrica) . La presente invención se refiere también a un método de ensayo de un sistema de medida y monitorización de una red eléctrica. El método de ensayo permite caracterizar el sistema de medida y monitorización de la red eléctrica, permitiendo de esta manera conocer con precisión sus fortalezas, debilidades y líneas de mejora, cuando supervisan las redes eléctricas a escala industrial. El sistema modular de una red eléctrica y el método de ensayo de un sistema de medida y monitorización de una red eléctrica, objetos de la presente invención, son de especial aplicación en la supervisión y control de las redes eléctricas. Antecedentes de la invención y problema técnico a resolver Los sistemas eléctricos de alta tensión (AT) están sometidos durante su vida útil a condiciones de funcionamiento donde aparecen solicitaciones eléctricas, mecánicas, térmicas y relacionadas con fenómenos medioambientales que, con el tiempo, provocan fallos imprevistos generados por distintos tipos de defecto. Por este motivo son numerosas las tecnologías conducentes a la medida y monitorización de las redes, con el objetivo de inimizar el número de fallos o en el caso de que éstos se produzcan, con el objetivo de que éstas queden protegidas de forma adecuada y vuelvan a su funcionamiento normal lo antes posible. De este modo, por un lado, una detección precoz de los defectos, preferiblemente en su estado incipiente, permitirá tomar las acciones correctivas necesarias para evitar fallos imprevistos que conllevan riesgos humanos y daños materiales, faltas de suministro e importantes pérdidas económicas. Y por otro, en el caso de producirse un fallo, una detección eficiente permitirá que las instalaciones queden protegidas de forma adecuada, minimizándose al máximo los tiempos de actuación y los efectos negativos anteriores. Actualmente existen en el mercado numerosas tecnologías conducentes a la medida y monitorización de las redes eléctricas de AT. Los factores principales que se consideran en los sistemas desarrollados para medir y monitorizar las redes son los siguientes. - El estado de los dieléctricos. Los defectos en los dieléctricos, generalmente asociados a la aparición de descargas parciales (DP) , con el tiempo dan lugar a fallos imprevistos. - La aparición de fallos producidos por defectos en los dieléctricos. Estos fallos dan lugar a cortocircuitos intermitentes o permanentes. - La temperatura de los activos. La aparición de puntos calientes por defectos o sobrecarga en las redes puede conducir a la degradación acelerada de los dieléctricos. Por tanto, resultaría conveniente aportar soluciones que permitan mejorar las tecnologías de medida y monitorización desarrolladas para la supervisión de los factores anteriores. Un primer problema al que se enfrentan las empresas del sector eléctrico y los desarrolladores de tecnologías conducentes a la medida y monitorización de las redes, es la falta de procedimientos de referencia o estandarizados que permitan caracterizar de forma completa reproducible la eficacia de estos sistemas medida y monitorización. Los sistemas de medida y monitorización más eficientes y con un coste razonable serán aquellos que ofrezcan mayores garantías de seguridad y los mejores posicionados en el mercado. Un segundo problema que han de afrontar estas empresas es la gran dificultad técnica y económica que tienen para caracterizar o probar los sistemas de medida y monitorización de forma completa y reproducible en instalaciones de campo o de laboratorio donde es necesario la generación y detección de defectos o de fallos reales. Esto se debe a que las instalaciones de campo se encuentran generalmente en servicio de forma permanente, por lo que las empresas propietarias no las pueden ceder para realizar pruebas, que por otro lado podrían causar daños irreversibles en las mismas e incluso en los equipos a probar. Por otro lado, en la mayoría de los casos, las instalaciones de laboratorio que se precisan suelen ser complejas, caras y solo se pueden utilizar para un número limitado de pruebas de caracterización y en una ubicación específica. Además, en las instalaciones de campo no es posible controlar las condiciones de ruido eléctrico y en las de laboratorio conseguir un control preciso generalmente resulta difícil y costoso. Un tercer problema principal surge porque en ambos casos (con instalaciones de campo o de laboratorio) , con el estado de la técnica actual, no resulta posible crear las condiciones de medida controladas necesarias para la completa y reproducible caracterización de los sistemas de medida y monitorización. Las condiciones de medida están relacionadas con la forma de generar defectos, fallos y señales de ruido y con el tipo y posicionamiento de los sensores. En las instalaciones de campo o de laboratorio las condiciones de medida están muy limitadas y vienen impuestas por la propia disposición puntual de las mismas, por la posible disposición puntual de algún tipo de sensor y por el ruido presente, generalmente variable y no controlable en el entorno de los puntos de medida. Para caracterizar de forma completa y reproducible los sistemas de medida y monitorización, es preciso controlar las señales de ruido y crear condiciones de medida relativas a la generación de defectos, fallos y ruido y posicionamiento de sensores, que sean variables, controlables y reproducibles. Esto sólo se puede conseguir creando estas condiciones de medida en un sistema modular a escala físico, en el que se simule el comportamiento de varios tipos de red reales. El documento WO 2019162551 A1 se refiere a un "Método para la evaluación y calificación de las características funcionales de instrumentos de medida y diagnóstico de descargas arciales e instalación para generar series de pulsos de referencia de descargas parciales". Este documento pretende dar solución a alguno de los problemas del estado de la técnica mencionados anteriormente. No obstante, con la instalación descrita en el documento WO 2019162551 A1, no es posible simular las condiciones de defecto, fallo y ruido de las redes reales, y no es posible generar y medir de forma controlada defectos o fallos físicos como, por ejemplo, los relacionados con defectos de aislamiento que no generan DP o con la presencia de puntos calientes. Por lo que no resulta viable hacer las caracterizaciones de los sistemas de medida y monitorización de una red eléctrica de forma completa y reproducible. Por otro lado, con la inyección de las señales que simulan defectos, fallos y condiciones de ruido (generadas con un generador analógico como el propuesto en WO 2019162551 A1) , directamente en las unidades de medida de los sistemas a caracterizar, no resulta viable hacer las caracterizaciones de forma completa y reproducible, con sensores reales en un sistema físico y midiendo en un número no limitado de puntos. Por otra parte, con la generación de defectos o fallos físicos o con la inyección directa de las señales que simulan defectos, fallos y condiciones de ruido (generadas con un generador analógico) , en instalaciones reales existentes (de campo o de laboratorio) o en la propuesta (de laboratorio) del documento WO 2019162551 A1, no resulta posible realizar la simulación de los defectos, fallos y condiciones de ruido de forma adecuada. Esto es debido a que, dadas las características de las instalaciones de campo o de laboratorio, no es posible generar y medir los defectos o fallos físicos de forma controlada, controlar la adaptación de impedancias en los puntos de inyección y por tanto tampoco las características de las señales inyectadas. Tampoco es posible controlar diferentes condiciones de ruido en el entorno de los sensores. Por otro lado, acondicionar las instalaciones de campo o de laboratorio existentes para simular las condiciones de defecto, fallo y ruido de las redes reales, generando y midiendo de forma controlada los defectos, fallos y ruido, supondría un esfuerzo técnico y económico prácticamente inabordable y, en consecuencia, que no sea posible hacer las caracterizaciones de los instrumentos de medida y monitorización de forma completa y reproducible. Esto es ebido a la gran variedad de configuraciones físicas de estas instalaciones, a sus características técnicas y complejidad y a su dificultad de utilización. En resumen, durante la vida útil de los sistemas eléctricos de AT, éstos están sometidos a varios tipos de solicitaciones y a fenómenos medioambientales que provocan en ellos defectos que a menudo derivan en fallos. Con el objetivo de minimizar el número de fallos, o cuando éstos se producen, de que las redes de AT queden protegidas de forma adecuada, las empresas del sector eléctrico desarrollan y utilizan tecnologías conducentes a la medida y monitorización de los sistemas eléctricos. Con la medida y monitorización de los sistemas, mediante la detección eficiente y precoz de los defectos se pueden tomar las acciones correctivas necesarias para evitar fallos imprevistos. Por otro lado, mediante la detección eficiente de los fallos, las instalaciones quedan protegidas de forma adecuada. En ambos casos se evitan riesgos para los humanos, daños materiales, faltas de suministro, pérdidas económicas y elevados tiempos de actuación cuando aparece una incidencia. Como se ha explicado anteriormente, en el desarrollo y empleo de los sistemas de medida y monitorización, las empresas del sector eléctrico se enfrentan a los siguientes tres problemas fundamentales. - Falta de procedimientos de referencia o estandarizados que permitan su caracterización de forma completa y reproducible. - Dificultad técnica y económica para su caracterización de forma completa y reproducible en instalaciones de campo o de laboratorio por la falta de disponibilidad, los altos costes de utilización y la imposibilidad (en las instalaciones de campo) o gran dificultad (en las de laboratorio) para controlar las condiciones de ruido. - Además, con el uso de las instalaciones anteriores, con el estado de la técnica actual, no resulta posible crear las condiciones de medida controladas necesarias para la completa y reproducible caracterización de los sistemas de medida y monitorización. Descripción de la invención Con la invención que se describe a continuación, basada por un lado en la ejecución de un método de actuación propuesto y, por otro, en el uso de un sistema modular a escala asociado y necesario, es posible caracterizar de forma completa, reproducible y estandarizada los sistemas de medida y monitorización. De este modo, se presenta un desarrollo técnico viable que permite solucionar los tres problemas técnicos anteriores. De este modo, se presenta, por un lado, un método cuya ejecución permite caracterizar los sistemas de medida y monitorización y por otro, un sistema modular de red a escala físico asociado y necesario donde se realizan las pruebas de caracterización. Con el sistema modular a escala se superan las limitaciones y dificultades que aparecen con el uso de instalaciones reales de campo o de laboratorio. Esto se debe principalmente a que en este sistema se simulan las condiciones de medida reales de las redes de forma controlable y reproducible, en lo relativo a la generación de defectos, fallos y ruido y a la adaptación de varios tipos de sensores. La aplicación del método junto con el uso del sistema modular permite la realización de las pruebas de caracterización de los sistemas de medida y monitorización de forma completa, reproducible y estandarizada. Además, al tratarse de un sistema modular a escala transportable, las pruebas se pueden hacer de igual forma en cualquier parte del mundo. Una de las principales ventajas de la presente invención es la posible combinación de los siguientes factores. - Disponibilidad de varios tipos de instalación a escala, formados por diferentes subsistemas de módulos, que simulan varias instalaciones reales concretas. - Empleo de un subsistema integrado en la instalación a escala para el posicionamiento de defectos y fallos. - Y empleo de un subsistema de generación de señales y de un subsistema de inyección de ruido aleatorio, también integrados en la instalación a escala y adaptados a las condiciones de medida de los subsistemas de sensores de los sistemas a caracterizar. La invención que se presenta contribuye de forma significativa al avance tecnológico de las redes supervisadas inteligentes del futuro, conocidas como "smart grids". Así pues, con objeto de solucionar los inconvenientes anteriormente mencionados, la presente invención se refiere a un sistema modular de una red eléctrica y a un método de ensayo de un sistema de medida y monitorización de una red eléctrica. El sistema modular de una red eléctrica comprende: • un subsistema de módulos operativos, que comprende una pluralidad de módulos operativos configurados para reproducir el funcionamiento de una red eléctrica; • un subsistema de posicionamiento de defectos y fallos conectado al subsistema de módulos operativos, donde el subsistema de posicionamiento de defectos y fallos comprende al menos un bloque de generación de un defecto o fallo en el subsistema de módulos operativos; • un subsistema de inyección de ruido conectado al subsistema de módulos operativos, donde el subsistema de inyección de ruido comprende al menos un bloque de inyección de ruido configurado para inyectar una señal de ruido en el subsistema de módulos operativos; • un subsistema de generación de señales conectado al subsistema de posicionamiento de defectos y fallos y al subsistema de inyección de ruido, donde el subsistema de generación de señales está configurado para: generar y enviar señales al al menos un bloque de generación de un defecto o fallo para la introducción de al menos una señal de defecto o fallo en el subsistema de módulos operativos, y; generar y enviar señales al al menos un bloque de inyección de ruido para la inyección de al menos una señal de ruido aleatorio en el subsistema de módulos operativos; • un subsistema de sensores conectado al subsistema de módulos operativos, donde el subsistema de sensores comprende una pluralidad de sensores configurados para monitorizar y/o realizar medidas en el subsistema de módulos operativos, y; • un subsistema de medida conectado al subsistema de sensores, donde el subsistema de medida comprende al menos una unidad de adquisición de datos configurada para registrar y/o procesar (realizar cálculos) y/o mostrar los datos relativos a mediciones de los sensores. Mediante el sistema modular de una red eléctrica descrito anteriormente, se permite reproducir fielmente, a escala reducida o de laboratorio, las características constructivas y funcionales de una red eléctrica a escala industrial, y se permite emular las diferentes señales que se propagan a lo largo de la red eléctrica en caso de defecto en alguno de sus elementos operativos constituyentes o en caso de fallo (por ejemplo, un cortocircuito en uno o más puntos a lo largo de la red eléctrica) , así como emular las señales de ruido normalmente presentes en una red eléctrica. Gracias al sistema modular descrito anteriormente, se pueden reproducir diferentes condiciones de defecto y fallo, para caracterizar con ello los sistemas de medida y monitorización (que comprenden los sensores) de una red eléctrica. De manera preferente, el subsistema de módulos operativos comprende uno o más de cada uno de al menos los siguientes módulos operativos: • un módulo de cable aislado; • un módulo de cable aéreo; • un módulo de empalmes rectos; • un módulo de empalmes con cruzamiento de pantallas; • un módulo GIS (módulo de subestación aislada con gas) ; • un módulo de celdas de distribución; • un módulo de transformador; • un módulo de máquina rotativa, y; • un módulo auxiliar de conexión entre módulos operativos. Tal y como ya se ha mencionado, la presente invención se refiere también a un método de ensayo de un sistema de medida y monitorización de una red eléctrica. El método de ensayo de un sistema de medida y monitorización de una red eléctrica, objeto de la presente invención, comprende hacer uso de un sistema modular de una red eléctrica según se ha descrito anteriormente. El sistema de medida y monitorización que se pretende caracterizar (o evaluar) está compuesto por el subsistema de sensores y el subsistema de medida del sistema modular de una red eléctrica descrito anteriormente. Adicionalmente, el método de ensayo de un sistema de medida y monitorización de una red eléctrica, objeto de la presente invención, comprende: • configurar el sistema modular mediante la interconexión de los subsistemas; • generar defectos y/o fallos y/o ruido en el sistema modular, y; • medir y registrar las mediciones obtenidas mediante el subsistema de sensores y mediante el subsistema de medida, obteniendo una caracterización (o evaluación) del sistema de medida y monitorización ante los defectos y/o fallos y/o ruido generados. De manera preferente, la etapa de configuración del sistema modular comprende: • conectar entre sí los distintos módulos operativos del subsistema de módulos operativos; • conectar el al menos un bloque de generación de un defecto o fallo a al menos un punto del subsistema de módulos operativos; • conectar el al menos un bloque de inyección de ruido a al menos un punto del subsistema de módulos operativos; • conectar el subsistema de generación de señales al al menos un bloque de generación de un defecto o fallo y al al menos un bloque de inyección de ruido; • conectar (o instalar) los sensores en distintos puntos del subsistema de módulos operativos; • conectar el subsistema de medida a los sensores, y; • poner en funcionamiento los distintos módulos operativos. Asimismo, de manera preferente, la etapa de generar defectos y/o fallos y/o ruido en el sistema modular comprende: • seleccionar un conjunto de ensayos de referencia; • ajustar cada uno de los subsistemas a los ensayos seleccionados; • generar, mediante el subsistema de generación de señales y mediante el al menos un bloque de generación de un defecto o fallo, al menos un defecto o fallo y/o señal de ruido pulsante en el subsistema de módulos operativos (si los defectos o fallos son físicos no se utiliza el subsistema de generación de señales) ; • generar, mediante el subsistema de generación de señales y mediante el al menos un bloque de inyección de ruido, al menos una señal de ruido aleatorio en el subsistema de módulos operativos, y; • ajustar el nivel de señal de defecto o fallo y/o el nivel de la señal o señales de ruido. Por último, de manera preferente, la etapa de medir y registrar las mediciones obtenidas mediante el subsistema de sensores y mediante el subsistema de medida, obteniendo una aracterización (o evaluación) del sistema de medida y monitorización (compuesto por el subsistema de sensores y el subsistema de medida) ante los defectos y/o fallos y/o ruido generados comprende: • realizar mediciones con el subsistema de sensores junto con el subsistema de medida, y; • evaluar las medidas obtenidas mediante el subsistema de sensores junto con el subsistema de medida y obtener un informe de resultados (con una caracterización del sistema de medida y monitorización) . El sistema modular a escala, objeto de la presente invención, comprende un diseño que permite su aplicación para el método de ensayo de un sistema de medida y monitorización de una red eléctrica que se describe más adelante. En consecuencia, mediante el sistema modular de una red eléctrica descrito anteriormente se puede realizar una completa, reproducible y estandarizada caracterización de los sistemas de medida y monitorización de una red eléctrica. Los diferentes subsistemas, de forma conjunta, permiten simular diferentes tipos y tamaños de instalaciones eléctricas y con diferentes condiciones de medida en función de las necesidades, lo que confiere una gran versatilidad al mismo. En el sistema modular se simulan los mismos defectos y fallos de aislamiento, las mismas condiciones de ruido y las mismas condiciones de medida de las redes reales. El subsistema de módulos operativos se forma mediante la unión de módulos operativos diseñados a escala que se seleccionan y configuran para simular un tipo determinado de instalación. El subsistema de posicionamiento de defectos y fallos se encuentra distribuido a lo largo del subsistema de módulos operativos. Mediante este subsistema de posicionamiento de defectos y fallos se generan defectos y fallos físicos. Además, este subsistema incluye al menos un bloque de generación de un defecto o fallo, cada uno de estos bloques supone un punto de inyección de señales analógicas para la simulación de los defectos y fallos que generan estas señales. Este subsistema está adaptado al subsistema de módulos operativos y al subsistema de generación de señales. En su diseño se tienen preferentemente en cuenta los siguientes spectos técnicos: caminos de propagación de los efectos de los fenómenos físicos, adaptabilidad de impedancias entre elementos para las señales analógicas y adaptaciones para el posicionamiento de sensores. El subsistema de inyección de ruido es necesario para la reproducción del ruido aleatorio de las instalaciones y se ubica en el entorno de los puntos donde se realizan las medidas. Se trata de un subsistema distribuido a lo largo del subsistema de módulos operativos que compone cada instalación. En el diseño de este subsistema también se tienen en cuenta, preferentemente, al menos los siguientes aspectos técnicos: caminos de propagación de las señales, adaptabilidad de impedancias y adaptaciones para el posicionamiento de sensores. Con el uso conjunto de los cuatro subsistemas, éste, más el de módulos operativos, el de posicionamiento de defectos y fallos y el de generación de señales, se pueden simular las condiciones de defecto, fallo, ruido y medida propias de las redes reales. Esto supone una solución válida para la completa y reproducible caracterización de los sistemas de medida y monitorización. El subsistema de generación de señales permite simular los defectos y fallos que generan señales analógicas y las condiciones de ruido aleatorio e impulsional de las redes. Las señales de defectos, de fallos y de ruido impulsional son inyectadas en el subsistema de posicionamiento de defectos y fallos. Las señales de ruido aleatorio se inyectan en el subsistema de inyección de ruido. Todas las señales anteriores son reproducidas en un generador digital-analógico. En concreto, con este generador se pueden reproducir de forma controlada señales de frecuencia industrial y señales transitorias de alta frecuencia y de ruido eléctrico con diferentes anchos de banda. El subsistema de sensores está constituido por los sensores que se empleen con los sistemas de medida y monitorización, por lo que normalmente se encuentra distribuido a lo largo del subsistema de módulos operativos. El subsistema de medida está preferentemente constituido por al menos una unidad de adquisición de varios canales por punto de medida, propia del sistema de medida y monitorización a caracterizar. La salida de los sensores se conecta a esta unidad. Los módulos operativos del subsistema de módulos operativos se diseñan teniendo en cuenta el requerimiento técnico de poder reproducir los defectos, fallos y condiciones de medida de las redes eléctricas reales, buscando siempre la mejor versión económicamente factible. De ste modo, los módulos operativos están preferentemente diseñados para que los efectos de los defectos físicos o las señales que se generan en la simulación de los defectos y fallos, se propaguen por los mismos de la misma forma que en las instalaciones reales, hasta que llegan a los sensores. En su diseño se ha tenido en cuenta el comportamiento de las señales transitorias de frente rápido que se generan en los defectos y fallos de aislamiento y que tienen componentes espectrales muy por encima de la frecuencia industrial de operación del sistema eléctrico. Según una posible forma de realización, los módulos operativos se han diseñado en base a las siguientes consideraciones: - Selección y disposición de los componentes para que los módulos operativos resulten con un peso, dimensiones y precio adecuados. - Capacidad para transmitir las señales de defectos o fallos en un ancho de banda de al menos hasta 350 MHz, para poder probar tecnologías que trabajen en UHF. - Capacidad para reproducir diferentes regímenes de neutro utilizando varias impedancias de puesta a tierra. - Adaptación de impedancias entre los elementos de los módulos operativos y entre el subsistema de módulos operativos en su conjunto y el resto de subsistemas. Esta consideración es conveniente para evitar distorsiones inadecuadas en las señales por efectos de reflexión y con ello estimaciones incorrectas de la magnitud de las mismas. - Velocidad de las señales cuando se propagan desde el foco del defecto o fallo hasta el punto donde se captan por los sensores. El parámetro de velocidad de propagación de las señales es utilizado por las funcionalidades de los sistemas de medida y monitorización, para determinar el emplazamiento de los defectos o fallos. - Atenuación de los efectos de los defectos físicos desde su foco hasta los sensores. - Atenuación de las señales analógicas en función de la frecuencia, cuando se propagan desde el foco del defecto o fallo hasta los sensores. - Acoplamiento de las señales analógicas entre las tres fases del subsistema de módulos por el fenómeno de "cross-taiking. - Las longitudes de los elementos distribuidos que componen los módulos de cable y GIS, han de ser las adecuadas para que las reflexiones de las señales en los cambios de impedancia del subsistema de módulos, tengan el mismo comportamiento que en los elementos distribuidos de la correspondiente instalación real, independientemente del lugar donde se simulen los defectos o fallos. Si esto se cumple, se evitan distorsiones inapropiadas en las formas de onda de las señales medidas. - Y finalmente, es conveniente que las longitudes seleccionadas para los elementos distribuidos que componen los módulos de cable y GIS contribuyan a satisfacer los requerimientos técnicos de bajo coste, peso y volumen. En este aspecto, el parámetro velocidad de propagación de las señales se ha de adaptar a la longitud final de los elementos coaxiales que configuren estos módulos. El diseño y la adaptación de los cinco subsistemas que componen el sistema modular de una red eléctrica, objeto de la presente invención, permite que, mediante el uso de un generador analógico de no más de 4 canales, se realicen las caracterizaciones de los sistemas de medida y monitorización de forma completa y reproducible, con un número no limitado de puntos de medida, con diferentes casuísticas de defecto, fallo o condiciones de ruido y empleando diferentes tipos de sensores reales. Esto es posible porque, simulando un defecto o fallo en un punto de la instalación y no más de tres señales de ruido aleatorio, como las señales se comportan igual que en las instalaciones reales, es posible medir en varios emplazamientos sin generar señales individuales para cada canal de medida del sistema a caracterizar. Desde un punto de vista técnico, esto supone una solución válida para las caracterizaciones. En el estado de la técnica anterior, si se prescinde del sistema modular y se opta por hacer las caracterizaciones inyectando directamente a las unidades de medida de los sistemas a caracterizar señales que simulan defectos, fallos y condiciones de ruido (generadas con un generador analógico) , no resulta viable hacer las caracterizaciones de los sistemas de medida y monitorización de una red eléctrica de forma completa y reproducible, con sensores reales en un sistema físico y midiendo en un número no limitado de puntos. Esto se debe principalmente a las siguientes consideraciones: - No se pueden reproducir o medir defectos o fallos físicos. - El efecto de los sensores en las caracterizaciones no se puede considerar de forma independiente. - Las señales de defecto, fallo y ruido generadas por cada canal deben ser registradas previamente en instalaciones reales, en varios emplazamientos y para varios sensores y posteriormente deconvolucionadas, con la dificultad que este proceso conlleva. - Si se prescindiese de las instalaciones reales para la adquisición de señales, sería necesario (y prácticamente imposible de abordar) realizar un estudio mediante software de simulación de redes y sensores, aplicando y un tratamiento complejo de las señales a reproducir, para simular las mismas condiciones de defecto, fallo, ruido y medida de las redes reales, considerándose diferentes casuísticas, tipos de sensores y tipos de red. - Se necesitaría una señal analógica individual para cada canal de medida de los sistemas a caracterizar. Como para realizar las caracterizaciones conviene medir al menos en tres puntos de la red trifásica, esto supone la necesidad de disponer de un convertidor digital analógico (D-A) de al menos 9 canales, con la capacidad de generar señales muestreadas con frecuencias de hasta 100 MS/s o incluso 1 GS/s (para caracterizar sistemas que operan en el rango HF, VHF y UHF) . Cada canal de este tipo tiene un coste muy elevado en el mercado, por lo que a partir de cuatro canales esta solución no es rentable. Por otro lado, en el estado de la técnica anterior, si se prescinde del sistema modular y se opta por hacer las caracterizaciones generando defectos físicos en instalaciones de campo o en las de laboratorio existentes, y/o inyectando directamente en las mismas señales que simulan defectos, fallos y condiciones de ruido (generadas con un generador analógico) , todo ello sin emplear un subsistema de posicionamiento de defectos y fallos junto con un subsistema de generación de ruido, no resulta viable hacer las caracterizaciones de los sistemas de medida y monitorización de una red eléctrica de forma completa y reproducible, con sensores reales en un sistema físico y midiendo en un número no limitado de puntos. Esto se debe principalmente a las siguientes consideraciones: - No es posible generar y medir de forma controlada defectos o fallos físicos como, por ejemplo, los relacionados con defectos de aislamiento que no generan DP o con la presencia de puntos calientes. - Si se inyectan en las instalaciones existentes señales que simulan defectos, fallos y condiciones de ruido (generadas con un generador analógico) , no se realiza la simulación de los defectos, fallos y condiciones de ruido de forma adecuada porque, en este caso, no es posible controlar la adaptación de impedancias en los puntos de inyección, no es posible controlar la energía de las señales en los caminos de propagación y no es posible controlar diferentes condiciones de ruido en el entorno de los sensores. También es debido a las diferentes características técnicas de las instalaciones y a la dificultad de controlar la adaptabilidad de los sensores en las mismas. Por otro lado, la opción de diseñar y adaptar un subsistema de posicionamiento de defectos y fallos y/o un subsistema de inyección de ruido, para su uso en las instalaciones de campo o de laboratorio existentes, supone un esfuerzo técnico y económico prácticamente imposible de abordar. Por lo que esta opción no sirve para solucionar el problema indicado en los dos párrafos anteriores. Esto es debido a la gran variedad de configuraciones físicas de estas instalaciones en el entorno de los defectos o fallos y en el entorno de los sensores, a sus diferentes características y complejidad técnica y a su dificultad de utilización. Sin embargo, es posible la cómoda adaptabilidad de estos subsistemas en el sistema modular que se propone en esta invención. Con el sistema modular de una red eléctrica, objeto de la presente invención, es posible realizar medidas de forma completa y reproducible en varios tipos de red y con diferentes sensores y condiciones de medida. Con las capacidades anteriores es posible asentar criterios de referencia para la caracterización general de los sistemas de medida y monitorización de una red eléctrica y poder realizar comparaciones de tecnologías en igualdad de condiciones y de forma estandarizada. De este modo se pueden generar informes de referencia con los resultados obtenidos. A continuación, se indican otras prestaciones importantes del sistema modular de una red eléctrica, objeto de la presente invención: - Gracias a su diseño modular y transportable es posible hacer las caracterizaciones considerando distintos tipos de red y en cualquier parte (laboratorio) del mundo. Esto supone una ventaja considerable frente al uso de soluciones menos adecuadas basadas en el empleo de instalaciones reales de campo o de laboratorio. - Dadas las pequeñas dimensiones del sistema modular y su fácil transportabilidad, es posible su uso en cámaras anecoicas, por lo que el control necesario de los niveles de ruido, posible mediante esta invención debido a la empleabilidad del subsistema de inyección de ruido, puede ser aún más efectivo al poderse evitar el posible ruido residual de los laboratorios apantallados o no apantallados. - Gracias a la forma de generarse los defectos, fallos y ruido en el subsistema de posicionamiento de defectos y fallos y a las características físicas de los elementos del sistema modular, se consigue que éstos sean detectados de la misma forma que en las instalaciones reales, al considerarse, entre otros, los efectos de "cross-taiking en las tres fases y de reflexión, atenuación y velocidad de propagación de las señales. Estas consideraciones permiten caracterizar todo tipo de funcionalidades. - Al poderse realizar pruebas de referencia con diferentes configuraciones de red, el sistema modular resulta útil para caracterizar la sensibilidad de uno o más tipos de sensores. También resulta útil para el estudio del mejor emplazamiento de los sensores y para la determinación del número óptimo de los mismos en función de un determinado nivel de sensibilidad especificado. - Además, se dispone de un sistema muy versátil por los siguientes aspectos: • Es posible la integración conjunta de un número no limitado de módulos operativos en el subsistema de módulos operativos, para configurar instalaciones de mayor tamaño y complejidad. • Al ser modular, mediante la combinación de diferentes módulos operativos es posible configurar, además de los tipos de instalación más habituales (basados en sucesiones de sistemas de cable y centros de transformación) , alguna instalación singular, como por ejemplo una línea de un parque eólico constituida por módulos opcionales de máquina rotativa, transformador, línea de cable aislado, celdas de media tensión (MT) y línea aérea. • Al ser modular, cuando todos los módulos operativos están unidos entre sí, se pueden realizar caracterizaciones en línea (on-line) y cuando se interrumpen las conexiones en algún módulo operativo se pueden hacer caracterizaciones fuera de línea (off-line) , en ambos casos de forma cómoda y sin riesgos eléctricos (todos los módulos tienen las conexiones accesibles y en el modelo a escala se trabaja con niveles de tensión seguros) . • Al ser modular y de tamaño según las necesidades, es de aplicabilidad tanto para los sistemas que operan supervisando una zona concreta y poco extensa de una instalación, como para los que operan supervisando zonas más extensas que incluyen sistemas de cable de longitud considerable. - Finalmente es importante indicar que el uso del sistema modular de una red eléctrica, objeto de la presente invención, permite realizar pruebas de caracterización de sistemas que supervisan redes que operan en corriente continua, mediante la configuración de líneas de transporte constituidas principalmente por los módulos de GIS y de cable, utilizando los módulos adaptados de dos de las fases de los sistemas trifásicos de corriente alterna. La aplicabilidad del método de ensayo de un sistema de medida y monitorización de una red eléctrica, objeto de la presente invención, así como el uso del sistema modular de una red eléctrica, objeto de la presente invención, resultan de utilidad no sólo para caracterizar sistemas de medida y monitorización, sino también para el desarrollo de tareas formativas, de sesiones de entrenamiento y de evaluación de técnicos especialistas en el análisis del estado de las redes. La invención descrita en este apartado está focalizada en aportar soluciones técnicas para caracterizar y mejorar las tecnologías de medida y monitorización de las redes eléctricas de AT. El método de ensayo de un sistema de medida y monitorización de una red eléctrica, objeto de la presente invención, está estructurado en las siguientes etapas principales (ya mencionadas anteriormente) , cuya ejecución hace viable la caracterización de los sistemas de medida y monitorización de forma completa, reproducible y estandarizada. En la Figura 1 e muestra un flujograma con las diferentes etapas y actuaciones que forman parte de una posible forma de realización del método de ensayo. - Primera etapa principal (EP 1) . Configuración del sistema modular mediante la interconexión de los módulos operativos para la simulación de una determinada instalación de AT. - Segunda etapa principal (EP 2) . Generación de defectos y/o fallos y/o ruido en el sistema modular. - Tercera etapa principal (EP 3) . Medida y registro de las mediciones obtenidas mediante el subsistema de sensores y mediante el subsistema de medida, y obtención de una caracterización del sistema de medida y monitorización ante los defectos y/o fallos y/o ruido generados. En la primera etapa principal del método (EP 1) se pueden configurar varias instalaciones físicas ad hoc trifásicas de referencia, adaptadas a las características de las redes reales, para realizar las caracterizaciones. Con estas instalaciones es posible realizar los procesos de caracterización de forma completa, reproducible y estandarizada, al poderse prescindir de las instalaciones de campo o de laboratorio en las que se usan activos reales, o de otras plataformas de ensayo (de laboratorio) , con las que no se pueden conseguir de forma controlada las condiciones de medida de las redes reales. Todo ello sin riesgos eléctricos, al trabajar con niveles de tensión seguros (típicamente menos de 110 V) . Es decir, mediante la aplicabilidad de las etapas ejecutables indicadas en esta primera etapa principal del método (EP 1) , se configura un sistema modular (ad hoc trifásico) , en función del tipo de instalación de AT que se precise, con el que se consiguen las condiciones de medida de las redes reales. Esto es posible gracias al diseño e integración de los elementos siguientes, denominados en esta invención "subsistemas": - el subsistema de módulos operativos; - el subsistema de posicionamiento de defectos y fallos; - el subsistema de inyección de ruido; - el subsistema de generación de señales; - el subsistema de sensores, y; - el subsistema de medida. Las características técnicas de estos subsistemas serán descritas más adelante en la parte explicativa del sistema modular a escala. Dentro de la primera etapa principal (EP 1) , primero (etapa EP 1-1 del método) se configura el subsistema de módulos que definirá el tipo de instalación a simular en función de las necesidades. A continuación (etapa EP 1-2 del método) se configura e integra el resto de subsistemas y se instala el subsistema de medida constituido por los equipos de medida y monitorización a caracterizar. Para la caracterización de las funcionalidades, el posicionamiento de los defectos o fallos y de los sensores se realiza en posiciones estratégicas y definidas del sistema modular, a través del subsistema de posicionamiento de defectos y fallos y del subsistema de sensores respectivamente. La configuración de los subsistemas anteriores y su posicionamiento generalmente están relacionados con el sistema a caracterizar. El uso del sistema modular permite que los sensores utilizados por los sistemas de medida y monitorización puedan ser reales y de varios tipos, por ejemplo, entre otros y de forma no excluyente, capacitivos, transformadores de corriente de alta frecuencia (HFCTs en la literatura inglesa) , antenas (UHF) , transformadores de protección de tensión o corriente, sondas de temperatura, etc. Una vez configurados todos los subsistemas, se ponen en funcionamiento los equipos de medida y monitorización a caracterizar (etapa EP 1-3 del método) . Tras la ejecución de estas tres etapas, el sistema modular está preparado y ya es posible realizar en él la caracterización de los equipos de medida y monitorización. En la segunda etapa principal (EP 2) del método se generan los defectos y/o fallos y/o ruido en el sistema modular. Para la caracterización completa, reproducible y estandarizada de los sistemas, se consideran y seleccionan (etapa EP 2-4 del método) un conjunto definido de pruebas de referencia. Estas pruebas, para la versión más sencilla de la invención, se especifican en la Tabla 1 (ver más adelante) . Las funcionalidades que se pueden caracterizar son, de forma no excluyente, las desarrolladas para detectar defectos de aislamiento (con o sin generación de DPs) , fallos de islamiento, puntos calientes o anomalías en los sistemas de puesta a tierra. Para cada una de las funcionalidades se adaptan y ajustan de forma conveniente los subsistemas que componen el sistema modular (etapa EP 2-5 del método) . Las pruebas de evaluación seleccionadas para un sistema a caracterizar concreto se preparan de forma secuencial. Para la realización de las pruebas se generan en el sistema modular defectos o fallos con o sin señales de ruido (etapa EP 2-6 del método) , empleándose para ello principalmente el subsistema de posicionamiento de defectos y fallos. En este subsistema es posible generar de forma controlada y reproducible, defectos físicos de referencia no relacionados con señales transitorias (por ejemplo, defectos de aislamiento o puntos calientes) , para ser detectados en las mismas condiciones que se detectan en una instalación real (etapa EP 2-6a del método) . Por otro lado, los defectos y fallos asociados con señales transitorias analógicas (por ejemplo, los defectos de aislamiento que generan DPs o los fallos por cortocircuito) , son generados en el subsistema anterior (etapa EP 2-6b del método) , para también ser detectados en las mismas condiciones que se detectan en una instalación real. Estos defectos y fallos se generan inyectando, con adaptación de impedancias, señales analógicas que son producidas por el subsistema de generación de señales con diferentes formas y anchos de banda y de forma reproducible y secuencial. Tabla 1. Pruebas de referencia para las caracterizaciones. Para simular las condiciones de medida propias de las instalaciones reales es preciso crear las mismas condiciones de ruido presentes en éstas. Este requisito se cumple inyectando en el sistema modular señales analógicas de ruido de dos formas diferentes (etapa EP 2-6c del método) . - El ruido aleatorio de fondo se inyecta a través del subsistema de inyección de ruido. Con este subsistema se simula en los puntos de medida, las mismas condiciones de ruido que hay en las instalaciones reales. Es decir, las señales de ruido inyectadas son de la misma naturaleza que las registradas en las instalaciones reales y se miden en las mismas condiciones que en éstas. - Por otro lado, el ruido de tipo pulsante que se propaga de forma conducida por los activos de las instalaciones, se inyecta del mismo modo que las señales transitorias analógicas con las que se simulan defectos y fallos. Por lo que este tipo de ruido es inyectado en el subsistema de posicionamiento de defectos y fallos. Todas las señales analógicas son ajustables en forma, magnitud y espectro en frecuencia y son generadas con el subsistema generador de señales. Las señales de ruido cuando se inyectan se miden superpuestas con las señales de defectos o de fallos. Para una caracterización completa de los sistemas es posible generar (en la etapa EP 2-6 del método) varios defectos y/o fallos coexistentes en diferentes fases y emplazamientos superponiendo además señales de ruido. También es posible generar de forma simultánea más de un defecto en un mismo emplazamiento junto con señales de ruido. Todo lo anterior permite realizar las medidas con las mismas condiciones y casuísticas que en una instalación real. Para realizar las medidas con las mismas condiciones que en una instalación real, todas las señales analógicas relacionadas con defectos, fallos y ruido que se generan han sido previamente medidas en instalaciones reales y posteriormente deconvolucionadas mediante algoritmos parametrizados. En el proceso de deconvolución se considera el efecto de los parámetros físicos de las redes reales y del sistema modular, la adaptación de impedancias y la influencia del tipo y posicionamiento de los sensores. Posteriormente (en la etapa EP 2-7 del método) , el nivel de los defectos y fallos y cuando sea preciso el de las señales de ruido se ajusta en niveles discretos simulando diferentes grados de criticidad y de ruido (interferencias) , lo que hace posible caracterizar de forma completa las funcionalidades mediante la obtención de curvas de comportamiento. Para la caracterización de algunas funcionalidades se requiere el ajuste de la generación de defectos y fallos y/o ruido en varios niveles sucesivos (etapas EP 2-6 y EP 2-7 del método) . Este requerimiento se muestra en el flujograma de la Figura 1 mediante el lazo de realimentación marcado con una línea discontinua. Cada vez que se ejecuta la etapa EP 3-8 (medida y registro de las señales) que se explica a continuación, para cada prueba de caracterización se comprueba si se ha realizado el ajuste de todos los niveles de los defectos o fallos o señales de ruido, esto se muestra en la Figura 1 con el rombo de decisión de la pregunta 1 (P1) : se han realizado las medidas y registros con todos los niveles de los defectos o fallos o ruido? Además, como las funcionalidades son evaluadas de forma secuencial, se ha añadido el bucle de realimentación mostrado con una línea de puntos. De este modo, si la respuesta a la pregunta P2 es afirmativa, se formula en el siguiente rombo de decisión la pregunta 2 (P2) : se han realizado todas las pruebas? Cada vez que se ejecutan las etapas EP 2-5, EP 2-6 y EP 2-7 para cada prueba, el sistema modular queda preparado para poder realizar las medidas y registro de las señales en la siguiente etapa principal (EP 3) . En la tercera etapa principal del método (EP 3) se realiza la evaluación de las funcionalidades de forma secuencial. De este modo se llevan a cabo las medidas con los sistemas de medida y monitorización (en la etapa EP 3-8 del método) , empleando al menos un subsistema de sensores. Posteriormente, las medidas son registradas, procesadas y analizadas. Finalmente (en la etapa EP 3-9 del método) se realiza la evaluación del sistema de medida y monitorización y se elabora el correspondiente informe de resultados. Las interacciones entre las tres etapas principales del método se han indicado en la Figura 1 mediante las líneas de punto y trazo. Breve descripción de las figuras Se describen aquí de forma breve una serie de figuras, de ejemplos no limitativos, que ayudan a comprender mejor la invención: La Figura 1: muestra un flujograma con diferentes etapas y actuaciones que forman parte de una posible forma de realización del método de ensayo de un sistema de medida y monitorización de una red eléctrica. La Figura 2a muestra una vista esquemática de una posible forma de realización de un módulo de cable aislado del subsistema de módulos operativos. La Figura 2b muestra una vista esquemática de una posible forma de realización de un módulo de cable aéreo del subsistema de módulos operativos. La Figura 2c muestra una vista esquemática de una posible forma de realización de un módulo de empalmes rectos del subsistema de módulos operativos. La Figura 2d muestra una vista esquemática de una posible forma de realización de un módulo de empalmes con cruzamiento de pantalla del subsistema de módulos operativos. La Figura 2e muestra una vista esquemática de una posible forma de realización de un módulo GIS del subsistema de módulos operativos. La Figura 2f muestra una vista esquemática de una posible forma de realización de un módulo de celdas de distribución del subsistema de módulos operativos. La Figura 2g muestra una vista esquemática de una posible forma de realización de un módulo de transformador del subsistema de módulos operativos. La Figura 2h muestra una vista esquemática de una posible forma de realización de un módulo de máquina rotativa del subsistema de módulos operativos. La Figura 2i muestra una vista esquemática de una posible forma de realización de un módulo auxiliar de conexión del subsistema de módulos operativos. La Figura 3 muestra una vista esquemática de una posible forma de realización de cuatro bloques de generación de un defecto o fallo del subsistema de posicionamiento de defectos y fallos. La Figura 4 muestra una vista esquemática de una posible forma de realización de un subsistema de inyección de ruido, conectado a un subsistema generador de señales analógicas. La Figura 5a muestra una vista esquemática de detalle, en perspectiva, de una posible forma de realización de un bloque de inyección de ruido del subsistema de inyección de ruido. La Figura 5b muestra una vista esquemática de detalle, lateral, de una posible forma de realización de un bloque de inyección de ruido del subsistema de inyección de ruido. La Figura 6 muestra una vista esquemática de un sistema de cable aislado de una línea de distribución de AT conectado en los extremos a una subestación GIS. La Figura 7 muestra una vista esquemática de un ejemplo de subsistema de módulos que permite simular un sistema de cable aislado de una línea de distribución de AT conectado en los extremos a una subestación GIS. La Figura 8 muestra una vista esquemática de un sistema de cable aislado de una línea de transporte de AT conectado en los extremos a una subestación GIS. La Figura 9 muestra una vista esquemática de un ejemplo de subsistema de módulos que permite simular un sistema de cable aislado de una línea de transporte de AT conectado en los extremos a una subestación GIS. La Figura 10 muestra una vista esquemática de un sistema de distribución de MT en anillo con cuatro centros de transformación (CTs) , cuatro puentes de transformador y cuatro transformadores. La Figura 11 muestra una vista esquemática de un ejemplo de subsistema de módulos que permite simular un sistema de distribución de MT en anillo con cuatro CTs, cuatro puentes de transformador y cuatro transformadores. La Figura 12 muestra una representación conjunta y esquemática de un ejemplo de los tres subsistemas con los que es posible simular los tres tipos de instalación, en la versión más sencilla de la invención. La Figura 13 muestra una vista esquemática de un ejemplo de sistema modular completo que permite simular un sistema de cable aislado de una línea de distribución de AT conectado en los extremos a una subestación GIS. La Figura 14 muestra unas gráficas con resultados de la prueba de sensibilidad frente al ruido. La Figura 15 muestra un gráfico con los resultados de la prueba de capacidad de discriminar la fase/s afectada/s por uno o más defectos de aislamiento. Se presenta una representación en 3D de la magnitud de los pulsos registrados de forma simultánea por la terna de sensores del inicio del sistema de cable. La Figura 16a muestra, para la fase R de una red trifásica, los resultados de la prueba de capacidad de detectar y diferenciar la presencia de los defectos de aislamiento. Se presentan diagramas 3D para la detección y separación de defectos, obteniéndose patrones individuales. La Figura 16b muestra, para la fase S de una red trifásica, los resultados de la prueba de capacidad de detectar y diferenciar la presencia de los defectos de aislamiento. Se presentan diagramas 3D para la detección y separación de defectos, obteniéndose patrones individuales. La Figura 17 muestra gráficos con los resultados de la prueba de capacidad de localizar uno o más defectos situados en emplazamientos diferentes o en el mismo. Se muestran los diagramas de localización de los defectos detectados en dos fases. La Figura 18 muestra gráficos con los resultados de la prueba de capacidad de discriminar diferentes defectos localizados en un mismo emplazamiento. Se presenta el resultado de la discriminación de dos defectos localizados en un mismo punto. La Figura 19 muestra gráficos con los resultados de la prueba de capacidad de identificar el tipo de defecto. Se muestra el resultado de la identificación automática realizada por una herramienta de inteligencia artificial, para tres defectos asociados con sus respectivos patrones. La Figura 20 muestra gráficos con los resultados de la prueba de capacidad de identificar el elemento defectuoso donde se encuentra cada defecto. Se presenta una tabla asociada donde se indican los resultados obtenidos para todos los factores analizados y el resultado de la identificación. Descripción detallada Se procede a continuación a hacer una descripción de al menos una posible forma de realización del sistema modular de una red eléctrica y del método de ensayo de un sistema de medida y monitorización de una red eléctrica. En cuanto al método de la presente invención, en la Figura 1 se muestra un flujograma con diferentes etapas y actuaciones que forman parte de una posible forma de realización del método de ensayo de un sistema de medida y monitorización de una red eléctrica. - Primera etapa principal (EP 1) . Configuración y preparación del sistema modular a escala para la simulación de una determinada instalación de AT. - Segunda etapa principal (EP 2) . Generación de defectos y/o fallos y/o ruido en el sistema modular. - Tercera etapa principal (EP 3) . Medida y registro de las mediciones obtenidas mediante el subsistema de sensores y mediante el subsistema de medida, y obtención de una caracterización del sistema de medida y monitorización ante los defectos y/o fallos y/o ruido generados. El sistema modular de una red eléctrica, objeto de la presente invención, comprende un subsistema de módulos operativos (100) , que a su vez comprende una pluralidad de módulos operativos (101) . En las Figuras 2a a 2i, se muestran diferentes módulos operativos (101) de este subsistema de módulos operativos (100) . Así pues, en la versión más sencilla de la invención, el subsistema de módulos operativos (100) puede estar formado por una combinación de, entre otros, los módulos que se indican a continuación: Módulo de cable aislado (101a) , mostrado esquemáticamente en la Figura 2a; Módulo de cable aéreo (101b) , mostrado esquemáticamente en la Figura 2b; Módulo de empalmes rectos (101c) , mostrado esquemáticamente en la Figura 2c; Módulo de empalmes con cruzamiento de pantallas (101d) , mostrado esquemáticamente en la Figura 2d; Módulo GIS (101e) (módulo de subestación aislada con gas) , mostrado esquemáticamente en la Figura 2e; Módulo de celdas de distribución (101f) , mostrado esquemáticamente en la Figura 2f; Módulo de transformador (101g) , mostrado esquemáticamente en la Figura 2g; Módulo de máquina rotativa (101h) , mostrado esquemáticamente en la Figura 2h; Módulo auxiliar de conexión (101i) , mostrado esquemáticamente en la Figura 2i, donde este módulo auxiliar de conexión (101i) permite conectar diferentes activos o módulos operativos (101) para conseguir los propósitos de adaptación de impedancias y de condiciones adecuadas de medida. Por ejemplo, los de unión cable-GIS, cable-celda de AT y cable-transformador. El sistema modular de una red eléctrica, objeto de la presente invención, comprende también un subsistema de posicionamiento de defectos y fallos (200) , el cual comprende al menos un bloque de generación (201) de un defecto o fallo. En la Figura 3 se muestran, a modo de ejemplo, cuatro elementos o bloques de generación de un defecto o fallo (201) distribuidos e instalados en un tramo de un subsistema de módulos operativos (100) . El sistema modular de una red eléctrica, objeto de la presente invención, comprende también un subsistema de inyección de ruido (300) , que a su vez comprende al menos un bloque de inyección de ruido (301) . En la Figura 4 se muestra un ejemplo, para la versión más sencilla de la invención, de un bloque del subsistema de inyección de ruido (301) aleatorio instalado en un tramo de un subsistema de módulos operativos (100) . En la Figura 5a y en la Figura 5b se muestra en detalle el bloque de inyección de ruido (301) de este subsistema de inyección de ruido (300) . El sistema modular de una red eléctrica, objeto de la presente invención, comprende también un subsistema de generación de señales (400) . Este subsistema está conectado al subsistema de posicionamiento de defectos y fallos (200) y al subsistema de inyección de ruido (300) , y está configurado para: - generar y enviar señales al al menos un bloque de generación (201) de un defecto o fallo para la introducción de al menos una señal de defecto o fallo o ruido pulsante en el subsistema de módulos operativos (100) , y; - generar y enviar señales al al menos un bloque de inyección de ruido (301) para la inyección de al menos una señal de ruido aleatorio en el subsistema de módulos operativos (100) ; En la Figura 4 se muestra, mediante una línea de raya discontinua, un ejemplo de conexión del subsistema de generación de señales (400) con uno de los bloques de generación (201) de un defecto o fallo o ruido pulsante distribuidos del subsistema de posicionamiento de defectos y fallos (200) . En la Figura 4 se muestra también, mediante una línea de puntos, un jemplo de conexión del subsistema de generación de señales (400) con uno de los bloques de inyección de ruido (301) aleatorio distribuidos del subsistema de inyección de ruido (300) . El sistema modular de una red eléctrica, objeto de la presente invención, comprende también un subsistema de sensores (500) . Se trata de los sensores (501) configurados para medir y/o monitorizar variables eléctricas, térmicas, etc., en el subsistema de módulos operativos (100) . En la Figura 5a y en la Figura 5b se muestra un ejemplo de subsistema de sensores (500) , ubicado en el interior del subsistema de inyección de ruido (300) . Está constituido por tres sensores (501) de tipo HFCT (transformador de corriente de alta frecuencia) . Estos sensores pueden ser sustituidos o complementados por otros, por ejemplo y de forma no excluyente por antenas (por ejemplo, antenas UHF (ultra alta frecuencia) ) , transformadores de protección de tensión o corriente y sondas de temperatura. A continuación se presenta un ejemplo de aplicación práctica del método propuesto en esta invención, para una mejor comprensión del mismo en cuanto a la configuración y preparación del sistema modular, la preparación de las pruebas de caracterización y la evaluación de las funcionalidades de los sistemas de medida y monitorización. Para la caracterización y comparación de los sistemas de medida y monitorización, todas las pruebas deben hacerse en condiciones controladas de ruido eléctrico, por lo que se recomienda su realización en laboratorios apantallados o en cámaras anecoicas. En la ejecución de la primera etapa principal del método (EP 1) , para la configuración del sistema modular se consideran fundamentalmente los siguientes aspectos técnicos, con el fin de reproducir las mismas condiciones de operatividad y medida de las redes reales: - Selección y disposición de los módulos operativos (101) necesarios para la configuración de un subsistema de módulos operativos (100) representativo de un determinado tipo de red. - Indicación de los puntos donde se van a producir defectos y/o fallos y donde se van a medir. - Instalación y configuración del resto de subsistemas (200, 300, 400, 500, 600) . - Definición de la forma de generar los defectos y fallos y las señales de ruido. A modo de ejemplo, para la versión más sencilla de la invención, se presentan a continuación tres instalaciones que pueden ser simuladas mediante los correspondientes tres subsistemas de módulos. Los tres subsistemas se configuran mediante módulos operativos (101) intercambiables. • Instalación 1: Sistema de cable aislado de una línea de distribución de AT, conectada en ambos extremos a una subestación GIS (A) , con dos empalmes rectos (B) y con una longitud equivalente de al menos 1.500 m (ver la Figura 6) . El subsistema de módulos operativos (100) para simular esta instalación está compuesto por dos módulos de GIS (101e) , tres módulos de cable aislado (101a) , dos módulos de empalmes rectos (101c) y dos módulos de conexión auxiliar (101i) (para unión cable-GIS) (ver la Figura 7) . • Instalación 2: Sistema de cable aislado de una línea de transporte de AT conectada en ambos extremos a una GIS (A) , con disposición de cruzamiento de pantallas en dos empalmes (C) y con una longitud equivalente total de al menos 1.500 m (ver la Figura 8) . El subsistema de módulos para simular esta instalación se obtiene cambiando en el anterior, los módulos de empalmes rectos (101c) por módulos de empalmes con cruzamiento de pantallas (101d) . Es decir, el subsistema queda configurado con los mismos dos módulos de GIS (101e) , tres módulos de cable aislado (101a) y dos módulos de conexión auxiliar (101i) (para unión cable-GIS) de la instalación anterior. Quedando la nueva configuración en los puntos intermedios implementada con dos módulos de empalmes con cruzamiento de pantallas (101d) (ver la Figura 9) . • Instalación 3: Sistema de distribución de MT en anillo con cuatro CTs (D) que alimentan a cuatro transformadores (E) y con una longitud total de al menos 2.000 m (ver la Figura 10) . El subsistema de módulos para simular esta instalación se obtiene cambiando en el primero, los módulos de empalmes rectos (101c) , módulos de GIS (101e) y módulos auxiliares de conexión (101i) (de unión cable-GIS) , por módulos de celdas de distribución (101f) , módulos auxiliares de conexión (101i) (de unión cable-transformador) y módulos de transformador (101g) . Es decir, el subsistema queda configurado con los mismos tres módulos de cable aislado (101a) (más uno adicional) , e incluye cuatro módulos nuevos de celdas de distribución (101f) , cuatro módulos auxiliares de conexión (101i) (de unión cabletransformador) y cuatro módulos de transformador (101g) (ver la Figura 11) . La configuración del sistema de distribución de MT puede ser completada, por ejemplo, con una salida desde uno de los transformadores a una máquina rotativa de MT. Todas las configuraciones anteriores pueden ser completadas con una entrada y/o salida de sistema de cable aéreo. Además, mediante la combinación de módulos adicionales es posible configurar, además de las instalaciones descritas, otras más complejas y/o más extensas. Todos los módulos que constituyen los subsistemas de módulos operativos (101) están diseñados para poder instalar y conectar, sobre la base de éstos últimos, el resto de subsistemas con los que se constituyen los sistemas modulares a escala finales. Para apreciar el carácter modular y flexible del subsistema de módulos, en la versión más sencilla de la invención, en la Figura 12 se muestran de forma conjunta y esquemática los tres subsistemas descritos con anterioridad. Con la combinación adecuada de módulos operativos (101) es posible simular cualquiera de las tres instalaciones, lo que confiere al diseño sencillez y versatilidad. Con la línea discontinua se especifican los módulos operativos (101) que se precisan para simular el sistema de distribución en AT (instalación 1) . Con la línea de puntos, los necesarios para simular el sistema de transporte en AT (instalación 2) . Y finalmente, con la línea de dos puntos y raya los necesarios para simular el sistema de distribución de MT en anillo (instalación 3) . Para exponer un modo de realización de la invención se procede a caracterizar una serie de funcionalidades de un sistema de medida y monitorización. Este sistema está desarrollado para la supervisión del estado de los dieléctricos en las redes de MT y AT. Las caracterizaciones se realizan con el sistema operando en la línea de distribución de AT de la instalación 1 presentada con anterioridad (ver las Figuras 6 y 7) . A continuación, se muestra el desarrollo de las etapas especificadas en la primera etapa principal del método (EP 1) (Configuración y preparación del sistema modular mediante la interconexión de los subsistemas) . - En la etapa 1 (EP 1-1) se configura el subsistema de módulos que se muestra en la Figura 7, que se corresponde con la línea de distribución de AT a monitorizar. - En la etapa 2 (EP 1-2) se integran el resto de subsistemas resultando el sistema modular que se muestra en la Figura 13. De este modo, los subsistemas integrantes de la instalación son el subsistema de módulos (100) , el subsistema de posicionamiento de defectos y fallos (200) , el subsistema de generación de señales (400) , el subsistema de inyección de ruido aleatorio (300) y el subsistema de sensores (500) . Para la realización de las pruebas de caracterización se ha considerado que en la instalación hay tres defectos de aislamiento que generan actividad de DP. Estos defectos se posicionan en dos fases y emplazamientos diferentes. La ubicación se muestra en la Figura 13 mediante puntos negros. Los defectos se producen en el subsistema de posicionamiento de defectos y fallos. Este ejemplo puede hacerse extensible a la inclusión de más tipos de defecto o incluso de algún fallo de aislamiento. En este ejemplo, la actividad de DP asociada a los tres defectos se genera con el subsistema de generación de señales. Este subsistema está conectado con el de posicionamiento de defectos y fallos. Para la realización de las medidas, el sistema de medida y monitorización a caracterizar emplea sensores no invasivos del tipo HFCT, estos sensores se posicionan en las puestas a tierra del sistema de cable. En este ejemplo de aplicación, los puntos de pedida se posicionan en ambos extremos del sistema de cable. Los sensores (501) empleados constituyen el subsistema de sensores (500) y se encuentran dentro del subsistema de inyección de ruido aleatorio (300) , con el fin de simular las mismas condiciones de medida que se producen en las instalaciones reales. Una vez integrados todos los subsistemas se procede a instalar el subsistema de medida (600) , que está formado por las unidades de adquisición del sistema de medida y monitorización que va a ser caracterizado. La salida de los sensores (501) del subsistema de sensores (500) se conecta a la entrada de las unidades de adquisición (601) del subsistema de medida (600) . - En la etapa 3 (EP 1-3) se realiza la puesta en funcionamiento del sistema de medida y monitorización. Tras la ejecución de estas tres etapas, el sistema modular está preparado y es posible realizar en él la caracterización del sistema de medida y monitorización. A continuación se muestra el desarrollo de las etapas especificadas en la segunda etapa principal del método (EP 2) (generación de defectos y/o fallos y/o ruido en el sistema modular) . - En la primera etapa de esta segunda etapa principal (EP 2) , (etapa EP 2-4 del método) (ver la Figura 1) , se selecciona un conjunto de pruebas de referencia. Las pruebas se especifican, de forma no excluyente, en la Tabla 1 mostrada anteriormente. Para la exposición de este modo de realización de la patente, donde se caracterizan las funcionalidades de un sistema que supervisa el estado de los dieléctricos mediante la medida de DP, se han considerado y seleccionado las siguientes pruebas. • Capacidad de detectar las DPs. Análisis de sensibilidad con medida en una posición. • Capacidad de discriminar la fase/s afectada/s por uno o más defectos de aislamiento. • Capacidad de detectar y diferenciar la presencia de los defectos de aislamiento. • Capacidad de localizar uno o más defectos situados en emplazamientos diferentes o en el mismo. • Capacidad de discriminar diferentes defectos localizados en un mismo emplazamiento. • Capacidad de identificar el tipo de defecto. • Capacidad de identificar el elemento defectuoso donde se encuentra cada defecto. - Una vez seleccionadas las pruebas, a continuación (en la etapa EP 2-5 del método) se adaptan y ajustan todos los subsistemas del sistema modular. • Para la ejecución de las pruebas se posicionaron en el sistema modular 8 elementos distribuidos que constituyen el subsistema de posicionamiento de defectos y fallos (200) (ver la Figura 13) . Los tres defectos de aislamiento se han generado en los tres elementos que se indican con puntos negros, al principio del cable (P1) y en el segundo empalme (P2) (ver la Figura 13 y la Tabla 2 a continuación) . • Para crear los defectos, las señales de DP se han generado con el subsistema de generación de señales (400) (ver la Figura 13) . Con este subsistema también se han generado las señales de ruido impulsional necesarias. • En cada punto de medida se colocan tres sensores HFCT (uno por cada fase) (501) abrazando los conductores de puesta a tierra del sistema de cable (ver la Figura 13) . • Para generar las mismas condiciones de medida que en las instalaciones reales, en los puntos de pedida se han ubicado dos bloques del subsistema de inyección de ruido aleatorio (300) . Los sensores (501) están embebidos en los dos bloques de este subsistema. A continuación (en la etapa EP 2-6 del método) , se preparan los defectos con las señales de ruido impulsional (etapa EP 2-6b) y las señales de ruido aleatorio (etapa EP 2-6c) . El ruido aleatorio se inyecta directamente en el subsistema de inyección de ruido aleatorio (300) . Los tipos de defecto, su posición, la fase afectada, los elementos defectuosos, el valor de carga de las DP, los niveles de ruido y las pruebas de referencia donde interviene cada defecto e muestran en la Tabla 2. Los dos tipos de ruido utilizados en las pruebas se muestran en las dos últimas filas. Tabla 2. Defectos, posición, fase, elemento defectuoso, carga de las DP y pruebas donde se utilizan. (*) Valor porcentual del nivel generado tomando como referencia un valor de las DP de 200 pC. (**) En la prueba 1, el nivel de este ruido se ajusta en los siguientes porcentajes: 5 %, 50 %, 100 % y 200 %. A continuación (en la etapa EP 2-7 del método) se procede a ajustar el nivel de los defectos y de las señales de ruido. Por ejemplo, para la realización de la prueba 1 (análisis de sensibilidad) , se genera un defecto con un valor constante de carga junto con el ruido #1 con diferentes niveles que se aplican en 4 cuatro pasos sucesivos, ver en el flujograma de la Figura 1 el lazo de realimentación marcado con la línea discontinua donde se formula la pregunta P1 explicada anteriormente. Para sintetizar esta exposición de un modo de realización de la patente, solamente se ha hecho el escalado de ruido en la prueba 1. A continuación, se muestra el desarrollo de las etapas especificadas en la tercera etapa principal del método (EP 3) (Medida y registro de las mediciones obtenidas mediante el subsistema de sensores y mediante el subsistema de medida, y obtención de una caracterización del sistema de medida y monitorización ante los defectos y/o fallos y/o ruido generados) . En la primera etapa de esta tercera etapa principal (EP 3) (que se corresponde con la etapa EP 3-8 del método) , se ejecuta la primera prueba de caracterización. Una vez acabado el escalado del ruido de la primera prueba se procede a realizar de forma secuencial el resto de pruebas (ver en el flujograma de la Figura 1 el lazo de realimentación marcado con la línea de puntos donde se formula la pregunta P2 explicada anteriormente) . Para cada prueba se hacen medidas de DP, se registran los datos y se analizan los resultados. Finalmente (en la etapa EP 3-9 del método) se realiza la evaluación final y el informe de resultados. Ejecución de la prueba 1 y análisis de resultados. En la prueba de análisis de sensibilidad frente al ruido, se genera el defecto interno tipo #1 con los niveles de ruido que se especifican en la Tabla 2. Con el sistema de medida a caracterizar se usa una herramienta de filtrado de ruido aleatorio basada en un filtro wavelet. Los resultados de las medidas realizadas con el sensor posicionado en la fase donde se genera el defecto se muestran en la Figura 14. En la primera columna se indican los niveles de ruido, en la segunda el patrón resuelto en fase obtenido en la medida una vez aplicado el filtro. En la tercera columna se muestra una captura de un periodo de la señal de referencia de tensión en el dominio del tiempo. Se puede observar que con un ruido del 200 % ya no es posible la detección del defecto. Para la ejecución de las pruebas 2, 3, 4, 5, 6 y 7 se generan de forma simultánea los defectos internos tipo cavidad #2 y #4 y el defecto interno tipo superficial #3 especificados en la Tabla 2, con los ruidos y niveles de ruido que se indican. Ejecución de la prueba 2 y análisis de resultados. En la prueba de capacidad de discriminar la fase/s afectada/s por uno o más defectos de aislamiento, con el sistema de medida a caracterizar se utiliza una herramienta de procesado que permite detectar las fases con defecto. Su funcionamiento está basado en el análisis de la magnitud de los pulsos registrados de forma simultánea por una terna de sensores (501) , posicionados en un mismo punto de la instalación. Los pulsos generados en un defecto posicionado en una fase se pueden ver en las otras dos con menos magnitud por el efecto de "cross-taiking. Las magnitudes de los pulsos se representan en un diagrama 3D, en el que cada eje se corresponde con una fase. El resultado de las medidas realizadas con la terna de sensores posicionada al inicio del sistema de cable se muestra en la Figura 15. En la imagen se ven tres o cuatro agrupaciones de pulsos (clusters) , uno o dos en la fase R (no está claro) , uno en la S y otro en el centro del iagrama. Con el resultado obtenido se puede indicar que las fases afectadas por posibles defectos de aislamiento son la R (probablemente con dos defectos) y la S (probablemente con 1) . El cluster del centro generalmente se asocia a las señales de ruido impulsional. Ejecución de la prueba 3 y análisis de resultados. Para la prueba de capacidad de detectar y diferenciar la presencia de los defectos de aislamiento, el sistema a caracterizar tiene una herramienta de procesado de los pulsos que, mediante el análisis de su forma de onda y de su espectro en frecuencia, permite detectar y separar los defectos de aislamiento. Los pulsos generados en un defecto tienen una forma de onda similar y generalmente cuando son medidos ésta difiere de las formas de los pulsos de otros defectos. Para cada pulso registrado se representa en un diagrama 3D el valor de tres parámetros relacionados con su forma de onda y espectro en frecuencia. En las Figuras 16a y 16b se muestra el resultado obtenido con la medida realizada con los sensores de las fases R y S, posicionados al principio del sistema de cable. A la izquierda (sensor de la fase R) se pueden visualizar tres clusters (ver la Figura 16a) y a la derecha (sensor de la fase S) dos (ver la Figura 16b) . Seleccionando los pulsos correspondientes a cada cluster se obtienen los patrones individuales representados. Con el resultado obtenido se puede indicar que en la fase R hay dos defectos, uno interno de tipo cavidad (cluster #1) y otro interno de tipo superficial (cluster #2) . Además, se ha detectado una fuente de ruido impulsional (cluster #3) . Para la fase S se ha detectado un defecto interno tipo cavidad (cluster #4) y el mismo ruido (cluster #5) . Ejecución de la prueba 4 y análisis de resultados. Para la prueba de capacidad de localizar defectos situados en emplazamientos diferentes o en el mismo, el sistema de medida a caracterizar tiene una herramienta de procesado de las señales que, mediante el análisis de los tiempos de llegada de los pulsos a sensores ubicados en puntos diferentes de la misma fase, es posible conocer el emplazamiento de los defectos. La posición de los defectos se visualiza en un diagrama de localización. En la Figura 17 se muestra el resultado obtenido con la medida realizada con los dos sensores de la fase R y con los dos de la S. Con los resultados obtenidos se puede indicar que hay al menos un defecto en la fase R posicionado al principio del sistema de cable. El defecto o defectos de la fase R pueden estar tanto en la GIS como en la terminación del cable. También se puede indicar que hay al menos un defecto en la fase S, posicionado en el segundo empalme. Ejecución de la prueba 5 y análisis de resultados. En la prueba de capacidad de discriminar defectos localizados en un mismo emplazamiento, combinando las herramientas de localización y de separación de defectos, es posible la discriminación de los mismos. Seleccionando los pulsos localizados en la fase R (ver la parte superior izquierda de la Figura 18) y aplicándoles la herramienta de separación (ver la parte media izquierda de la Figura 18) , se obtienen tres clusters y patrones (ver la parte inferior izquierda de la Figura 18) . Para la fase S, se obtienen dos clusters y dos patrones (ver la parte inferior derecha de la Figura 18) . Con el resultado obtenido se han discriminado y corroborado los dos defectos internos de la fase R (clusters #1 y #2) localizados en el mismo emplazamiento. También se corrobora la presencia del único defecto interno de la fase S. Ejecución de la prueba 6 y análisis de resultados. Para la prueba de capacidad de identificar el tipo de defecto, el sistema a caracterizar tiene una herramienta de inteligencia artificial que, mediante el análisis de los patrones individuales, identifica de forma automática los defectos de aislamiento asociados. En la Figura 19 se presenta el resultado obtenido tras el análisis de los cinco patrones (#1, #2, #3, #4, #5) que se obtuvieron en la prueba 3 (detección y diferenciación de defectos) (ver la Figura 16a y la Figura 16b) . Para los patrones #1 y #4 se identifica un defecto interno tipo cavidad (C) , para el #2 un defecto interno tipo superficial (IS) y para los #3 y #5 ruido impulsional (RI) . Ejecución de la prueba 7 y análisis de resultados. En la prueba de capacidad de identificar el elemento defectuoso donde se encuentra cada defecto, es de utilidad el uso de una herramienta del sistema de medida con la que se analiza la polaridad de los pulsos. El análisis de la polaridad sirve para definir si el elemento defectuoso se encuentra a un lado u otro del punto de medida. Para determinar el elemento defectuoso con defecto, además de analizar la polaridad de los pulsos, se analiza la forma del patrón, su defecto asociado y el posicionamiento resultante de la prueba 4. En la Figura 20 se presenta un resumen con toda la información considerada, donde en la primera columna se indican los defectos (D1, D2 y D3) , en la segunda la polaridad de los pulsos (positiva "+" o negativa "-") , en la tercera los patrones correspondientes, en la cuarta el tipo de defecto asociado (cavidad (C) , superficial interno (SI) , ...) y en la quinta su posicionamiento (posición en el circuito (P1, P2, ...) y fase (R, S o T) ) . El resultado obtenido en la identificación de los elementos defectuosos: GIS (GI) , terminación de cable (TC) o empalme (EM) , se muestra en la sexta columna de la Figura 20. Una vez ejecutadas todas las pruebas se procede a realizar el informe final. Para este ejemplo de aplicación, este informe se presenta en la Tabla 3 a modo de resumen, indicándose los resultados obtenidos en cada prueba. Tabla 3. Informe final.
Publicaciones:
ES2961406 (11/03/2024) - A1 Solicitud de patente con informe sobre el estado de la técnica
Eventos:
En fecha 29/12/2023 se realizó Registro Instancia de Solicitud
En fecha 29/12/2023 se realizó Admisión a Trámite
En fecha 29/12/2023 se realizó Aceptación Tramitación CAP
En fecha 29/12/2023 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 08/01/2024 se realizó Superado examen de oficio
En fecha 19/02/2024 se realizó Realizado IET
En fecha 04/03/2024 se realizó 1109P_Comunicación Traslado del IET
En fecha 11/03/2024 se realizó Publicación Solicitud
En fecha 11/03/2024 se realizó Publicación Folleto Solicitud con IET (A1)
Pagos:
30/11/2023 - Pago Tasas IET
Fuente de la información
Parte de la información aquí publicada es pública puesto que ha sido obtenida de la Oficina de Propiedad Industrial de los diferentes países el 08/05/2024 y por lo tanto puede ser que la información no esté actualizada.Parte de la información aquí mostrada ha sido calculada por nuestro sistema informático y puede no ser veraz.
Privacidad
Si considera que al información aquí publicada afecta a su privacidad y desea que eliminemos la información aquí publicada envíe un email a info@patentes-y-marcas.com o rellene el formulario que encontrará aquí.Información sobre el registro de patente nacional por Sistema modular de una red eléctrica y método de ensayo de un sistema de medida y monitorización de una red eléctrica con el número P202331099
El registro de patente nacional por Sistema modular de una red eléctrica y método de ensayo de un sistema de medida y monitorización de una red eléctrica con el número P202331099 fue solicitada el 29/12/2023. Se trata de un registro en España por lo que este registro no ofrece protección en el resto de países. El registro Sistema modular de una red eléctrica y método de ensayo de un sistema de medida y monitorización de una red eléctrica con el número P202331099 fue solicitada por UNIVERSIDAD POLITÉCNICA DE MADRID mediante los servicios del agente ELZABURU, S.L.P. El registro [modality] por Sistema modular de una red eléctrica y método de ensayo de un sistema de medida y monitorización de una red eléctrica con el número P202331099 está clasificado como G01R 31/00,H02J 13/00,G01R 17/00,G01R 31/12 según la clasificación internacional de patentes.
Otras invenciones solicitadas en la clasificación internacional de patentes G01R 31/00,H02J 13/00,G01R 17/00,G01R 31/12.
Es posible conocer invenciones similares al campo de la técnica se refiere. El registro de patente nacional por Sistema modular de una red eléctrica y método de ensayo de un sistema de medida y monitorización de una red eléctrica con el número P202331099 está clasificado con la clasificación G01R 31/00,H02J 13/00,G01R 17/00,G01R 31/12 por lo que si se desea conocer más registros con la clasificación G01R 31/00,H02J 13/00,G01R 17/00,G01R 31/12 clicar aquí.Otras invenciones solicitadas a través del representante ELZABURU, S.L.P
Es posible conocer todas las invenciones solicitadas a través del agente ELZABURU, S.L.P entre las que se encuentra el registro patente nacional por Sistema modular de una red eléctrica y método de ensayo de un sistema de medida y monitorización de una red eléctrica con el número P202331099. Si se desean conocer más invenciones solicitadas a través del agente ELZABURU, S.L.P clicar aquí.Patentes en España
Es posible conocer todas las invenciones publicadas en España entre las que se encuentra el registro patente nacional por Sistema modular de una red eléctrica y método de ensayo de un sistema de medida y monitorización de una red eléctrica. Nuestro portal www.patentes-y-marcas.com ofrece acceso a las publicaciones de patentes en España. Conocer las patentes registradas en un país es importante para saber las posibilidades de fabricar, vender o explotar una invención en España.Patentes registradas en la clase G
Es posible conocer todas las patentes registradas en la clase G (FISICA) entre las que se encuentra la patente Sistema modular de una red eléctrica y método de ensayo de un sistema de medida y monitorización de una red eléctrica con el número P202331099. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase G01
Es posible conocer todas las patentes registradas en la clase G01 (METROLOGIA; ENSAYOS) entre las que se encuentra la patente Sistema modular de una red eléctrica y método de ensayo de un sistema de medida y monitorización de una red eléctrica con el número P202331099. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase G01R
Es posible conocer todas las patentes registradas en la clase G01R (MEDIDA DE VARIABLES ELECTRICAS; MEDIDA DE VARIABLES MAGNETICAS) entre las que se encuentra la patente Sistema modular de una red eléctrica y método de ensayo de un sistema de medida y monitorización de una red eléctrica con el número P202331099. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase H
Es posible conocer todas las patentes registradas en la clase H (ELECTRICIDAD) entre las que se encuentra la patente Sistema modular de una red eléctrica y método de ensayo de un sistema de medida y monitorización de una red eléctrica con el número P202331099. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase H02
Es posible conocer todas las patentes registradas en la clase H02 (PRODUCCION, CONVERSION O DISTRIBUCION DE LA ENERGIA ELECTRICA) entre las que se encuentra la patente Sistema modular de una red eléctrica y método de ensayo de un sistema de medida y monitorización de una red eléctrica con el número P202331099. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase H02J
Es posible conocer todas las patentes registradas en la clase H02J (CIRCUITOS O SISTEMAS PARA LA ALIMENTACION O LA DISTRIBUCION DE ENERGIA ELECTRICA; SISTEMAS PARA EL A) entre las que se encuentra la patente Sistema modular de una red eléctrica y método de ensayo de un sistema de medida y monitorización de una red eléctrica con el número P202331099. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.
¿Tienes alguna duda?
Escribe tu consulta y te responderemos rápida y gratuitamente.

Otras patentes similares
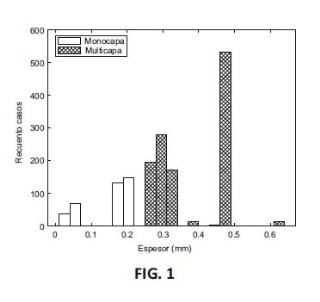
 P202331056
P202331056
Dispositivo de implante para tratamiento de patologías mediante campos eléctricos
P202331078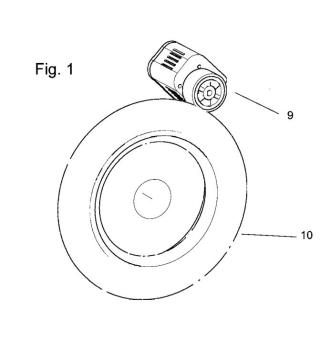
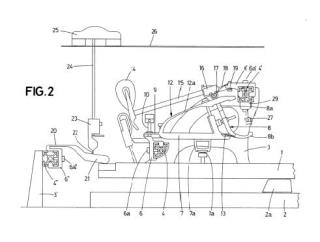 P202430039
P202430039Profesionales Recomendados
Barcelona
933182440
España
933182440
España

Barcelona
+34 93 362 16 97
España
+34 93 362 16 97
España

Barcelona
932 593 600
España
932 593 600
España







