


- Home /
- Publicaciones de patentes /
- SISTEMA DE INSPECCION NO DESTRUCTIVA POR ULTRASONIDOS PARA REGISTRO FLEXIBLE CON ENCODER INALAMBRICO
Patente nacional por "SISTEMA DE INSPECCION NO DESTRUCTIVA POR ULTRASONIDOS PARA REGISTRO FLEXIBLE CON ENCODER INALAMBRICO"
Este registro ha sido solicitado por
FUNDACION ANDALUZA PARA EL DESARROLLO AEROESPACIAL
a través del representanteJOSE MARIA BARTRINA DIAZ
Contacto
- Estado: Vigente
- País:
- España
- Fecha solicitud:
- 30/12/2011
- Número solicitud:
-
P201132145
- Número publicación:
-
ES2411811
- Fecha de concesión:
-
02/07/2014
- Inventores:
-
Persona física
- Datos del titular:
-
FUNDACION ANDALUZA PARA EL DESARROLLO AEROESPACIAL
- Datos del representante:
-
JOSE MARIA BARTRINA DIAZ
- Clasificación Internacional de Patentes:
- G01B 17/00,G01S 15/00
- Clasificación Internacional de Patentes de la publicación:
- G01B 17/00,G01S 15/00
- Fecha de vencimiento:
Quiero registrar una patente

Reivindicaciones:
+ ES-2411811_A21. Sistema de inspección no destructiva por ultrasonidos para registro flexible con encoder inalámbrico caracterizado por estar integrado por tres subsistemas: subsistema consistente en escáner de ultrasonidos para ensayos no destructivos, subsistema de posicionamiento a distancia y subsistema de comunicaciones, control, recogida y almacenamiento de datos, , más los interfaces necesarios para conectar entre sí los mismos. 2. Sistema de inspección no destructiva por ultrasonidos para registro flexible con encoder inalámbrico de acuerdo con la reivindicación 1, caracterizado porque el escáner de ultrasonidos para ensayos no destructivos consiste en una sonda emisora-receptora de pulsos sonoros a frecuencias ultrasónicas en el que, analizando los tiempos de retardo de los ecos, se obtiene información sobre las inter-fases internas del material y se pueden detectar anomalías respecto al patrón esperado. 3. Sistema de inspección no destructiva por ultrasonidos para registro flexible con encoder inalámbrico de acuerdo con la reivindicación 1 y 2, caracterizado porque el subsistema de posicionamiento a distancia está compuesto por un conjunto de cámaras dotadas de un sistema de control de identificación de marcadores colocados sobre la pieza a controlar en posición y orientación. 4. Sistema de inspección no destructiva por ultrasonidos para registro flexible con encoder inalámbrico de acuerdo con la reivindicación 1, 2 y 3, caracterizado porque el subsistema de control será el encargado de recoger los datos suministrados por los otros dos subsistemas y aparearlos con objeto de recabar la información precisa de la posición y la orientación de la sonda de ultrasonidos para cada medida realizada. El subsistema de control gestiona el almacenamiento de los datos recibidos en una base de datos, y determina el modo y lugar de almacenamiento de los datos así como determina el inicio y fin de la captura de datos. 5. Sistema de inspección no destructiva por ultrasonidos para registro flexible con encoder inalámbrico de acuerdo con la reivindicación 4, caracterizado porque el subsistema de control se divide, a su vez, en tres subsistemas: el subsistema de adquisición de datos, el subsistema de coordinación, y el subsistema de almacenamiento. El subsistema de adquisición de datos recoge los datos enviados desde el sistema de cámaras así como desde el escáner de ultrasonidos. El subsistema de adquisición incluye, además de la o las tarjetas de adquisición de datos necesarias, las interfaces para adaptar los datos desde las salidas de los otros dos sistemas para que puedan ser debidamente recogidos a través de las tarjetas de adquisición. El subsistema de coordinación realiza la asociación entre los datos adquiridos por el sistema de cámaras y el escáner de ultrasonidos, y proporciona la señal de reloj para la sincronización de la toma de muestras o, en su caso, para la interpolación de los datos si la toma de muestras no se realiza de forma síncrona con la adquisición de posiciones y orientaciones de la sonda del escáner de ultrasonidos. El subsistema de almacenamiento comprenderá una base de datos en la que se relacionan los datos obtenidos con el escáner de ultrasonidos con las posiciones y orientaciones de la sonda medidas, o calculadas, en el momento de la medida con el escáner de ultrasonidos. Dicha base de datos puede almacenarse en cualquier dispositivo de almacenamiento electrónico que contenga el subsistema de los algoritmos de control y coordinación.
+ ES-2411811_B11. Sistema de inspección no destructiva por ultrasonidos para registro flexible con encoder inalámbrico caracterizado por estar integrado por tres subsistemas: subsistema consistente en escáner de ultrasonidos para ensayos no destructivos, subsistema de posicionamiento a distancia y subsistema de comunicaciones, control, recogida y almacenamiento de datos, , más los interfaces necesarios para conectar entre sí los mismos. 2. Sistema de inspección no destructiva por ultrasonidos para registro flexible con encoder inalámbrico de acuerdo con la reivindicación 1, caracterizado porque el escáner de ultrasonidos para ensayos no destructivos consiste en una sonda emisora-receptora de pulsos sonoros a frecuencias ultrasónicas en el que, analizando los tiempos de retardo de los ecos, se obtiene información sobre las inter-fases internas del material y se pueden detectar anomalías respecto al patrón esperado. 3. Sistema de inspección no destructiva por ultrasonidos para registro flexible con encoder inalámbrico de acuerdo con la reivindicación 1 y 2, caracterizado porque el subsistema de posicionamiento a distancia está compuesto por un conjunto de cámaras dotadas de un sistema de control de identificación de marcadores colocados sobre la pieza a controlar en posición y orientación. 4. Sistema de inspección no destructiva por ultrasonidos para registro flexible con encoder inalámbrico de acuerdo con la reivindicación 1, 2 y 3, caracterizado porque el subsistema de control será el encargado de recoger los datos suministrados por los otros dos subsistemas y aparearlos con objeto de recabar la información precisa de la posición y la orientación de la sonda de ultrasonidos para cada medida realizada. El subsistema de control gestiona el almacenamiento de los datos recibidos en una base de datos, y determina el modo y lugar de almacenamiento de los datos así como determina el inicio y fin de la captura de datos. 5. Sistema de inspección no destructiva por ultrasonidos para registro flexible con encoder inalámbrico de acuerdo con la reivindicación 4, caracterizado porque el subsistema de control se divide, a su vez, en tres subsistemas: el subsistema de adquisición de datos, el subsistema de coordinación, y el subsistema de almacenamiento. El subsistema de adquisición de datos recoge los datos enviados desde el sistema de cámaras así como desde el escáner de ultrasonidos. El subsistema de adquisición incluye, además de la o las tarjetas de adquisición de datos necesarias, las interfaces para adaptar los datos desde las salidas de los otros dos sistemas para que puedan ser debidamente recogidos a través de las tarjetas de adquisición. El subsistema de coordinación realiza la asociación entre los datos adquiridos por el sistema de cámaras y el escáner de ultrasonidos, y proporciona la señal de reloj para la sincronización de la toma de muestras o, en su caso, para la interpolación de los datos si la toma de muestras no se realiza de forma síncrona con la adquisición de posiciones y orientaciones de la sonda del escáner de ultrasonidos. El subsistema de almacenamiento comprenderá una base de datos en la que se relacionan los datos obtenidos con el escáner de ultrasonidos con las posiciones y orientaciones de la sonda medidas, o calculadas, en el momento de la medida con el escáner de ultrasonidos. Dicha base de datos puede almacenarse en cualquier dispositivo de almacenamiento electrónico que contenga el subsistema de los algoritmos de control y coordinación. OFICINA ESPAÑOLA DE PATENTES Y MARCAS Nº solicitud: 201132145 ESPAÑA Fecha de presentación de la solicitud: 30.12.2011 Fecha de prioridad: INFORME SOBRE EL ESTADO DE LA TECNICA 51 Int. Cl. : G01B17/00 (2006.01) G01S15/00 (2006.01) DOCUMENTOS RELEVANTES Categoría 56 Documentos citados Reivindicaciones afectadas X PATRUNO F.; ALIVERTI A.; DELLACÃ? R. L.; BURNS D.; PEDOTTI A.. "Redundant System of Passive Markers for Ultrasound Scanhead Tracking". IEEE Transactions On Biomedical Engineering, 20050101 IEEE Service Center, Piscataway, NJ, USA 01.01.2005 Vol: 52 No: 1 Pags. 8. 96 XP011123749 ISSN 0018-9294. 1-5 A WO 2004019799 A2 (COMPUTERIZED MED SYST INC et al.) 11.03.2004 1-5 Categoría de los documentos citados X: de particular relevancia Y: de particular relevancia combinado con otro/s de la misma categoría A: refleja el estado de la técnica O: referido a divulgación no escrita P: publicado entre la fecha de prioridad y la de presentación de la solicitud E: documento anterior, pero publicado después de la fecha de presentación de la solicitud El presente informe ha sido realizado • para todas las reivindicaciones • para las reivindicaciones nº : Fecha de realización del informe 27.11.2013 Examinador J. Botella Maldonado Página 1/4 INFORME DEL ESTADO DE LA TÉCNICA Nº de solicitud: 201132145 Documentación mínima buscada (sistema de clasificación seguido de los símbolos de clasificación) G01B, G01S Bases de datos electrónicas consultadas durante la búsqueda (nombre de la base de datos y, si es posible, términos de búsqueda utilizados) INVENES, EPODOC, WPI, NPL, XPESP, XPAIP, XPI3E, INSPEC. Informe del Estado de la Técnica Página 2/4 OPINIÓN ESCRITA Nº de solicitud: 201132145 Fecha de Realización de la Opinión Escrita: 27.11.2013 Declaración Novedad (Art. 6.1 LP 11/1986) Reivindicaciones Reivindicaciones 1-5 SI NO Actividad inventiva (Art. 8.1 LP11/1986) Reivindicaciones Reivindicaciones 1-5 SI NO Se considera que la solicitud cumple con el requisito de aplicación industrial. Este requisito fue evaluado durante la fase de examen formal y técnico de la solicitud (Artículo 31.2 Ley 11/1986) . Base de la Opinión. La presente opinión se ha realizado sobre la base de la solicitud de patente tal y como se publica. Informe del Estado de la Técnica Página 3/4 OPINIÓN ESCRITA Nº de solicitud: 201132145 1. Documentos considerados. A continuación se relacionan los documentos pertenecientes al estado de la técnica tomados en consideración para la realización de esta opinión. Documento Número Publicación o Identificación Fecha Publicación D01 PATRUNO F.; ALIVERTI A.; DELLACÃ? R. L.; BURNS D.; Pedotti A.. "Redundant System of Passive Markers for Ultrasound Scanhead Tracking". IEEE Transactions On Biomedical Engineering, 20050101 IEEE Service Center, Piscataway, NJ, USA 01.01.2005 Vol: 52 No: 1 Pags. 8. 96 XP011123749 ISSN 0018-9294. 01.01.2005 D02 WO 2004019799 A2 (COMPUTERIZED MED SYST INC et al.) 11.03.2004 2. Declaración motivada según los artículos 29.6 y 29.7 del Reglamento de ejecución de la Ley 11/1986, de 20 de marzo, de Patentes sobre la novedad y la actividad inventiva; citas y explicaciones en apoyo de esta declaración Los sistemas de seguimiento posicional de una sonda de ultrasonidos basados en un sistema de sensado de posición optoelectrónico (OE) con marcadores activos o pasivos utilizan múltiples cámaras de TV sincronizadas con el parpadeo de la escena y un hardware especializado que reconoce los marcadores en cada cámara y mediante técnicas stereofotogramétricas calcula con gran exactitud la localización 3-D de cada marcador. En el documento D01 se presenta un método para el rastreo posicional de una sonda de ultrasonidos basado en un sistema OE con marcadores pasivos en el que un conjunto de procedimientos mejoran la localización de la sonda y evitan las posibles omisiones en la detección de los marcadores. El documento D02 presenta un sistema para localizar la posición y orientación de una sonda de ultrasonidos. El sistema utiliza una cámara, asociada a la sonda en una posición respecto a ella conocida y cuyo campo de visión contiene una serie de marcadores situados guardando entre ellos una determinada relación espacial. La posición de la sonda puede determinarse a través de las imágenes del grupo de marcadores que va obteniendo la cámara en su movimiento vinculado al de la sonda. Consideramos que el objeto de la invención recogido en las reivindicaciones de la 1ª a la 5ª deriva directamente y sin equívoco del documento D01 por haber sido divulgado en él, como en las reivindicaciones 1ª, 2ª y 3ª o por ser meras ejecuciones particulares obvias o fácilmente deducibles para un experto en la materia, como ocurre en las reivindicaciones 4ª y 5ª. Por lo tanto el objeto de la invención tal como se reivindica en las reivindicaciones de la 1ª a la 5ª, no es nuevo ni tiene actividad inventiva. Informe del Estado de la Técnica Página 4/4
Los productos y servicios protegidos por este registro son:
G01B 17/00 - G01S 15/00
Descripciones:
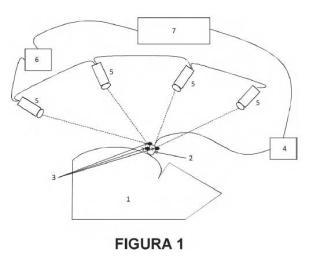
+ ES-2411811_A2 Sistema de inspección no destructiva por ultrasonidos para registro flexible con encoder inalámbrico. OBJETO DE LA INVENCIÓN La presente invención se refiere a un sistema para realizar inspecciones mediante la técnica de ultrasonidos utilizando un sistema inalámbrico para la adquisición de los datos ligados a la posición de la sonda (con la que se realiza la inspección) así como a su orientación espacial, permitiendo realizar un registro de la posición y señal ultrasónica de gran presión y exactitud. La presente invención se encuadra dentro del sector de la técnica de los ensayos no destructivos siendo su ámbito de aplicación los sectores aeronáutico, espacial, ferroviario, de la automoción, naval y de la construcción, principalmente. ESTADO DE LA TÉCNICA Los sistemas de inspección actuales con registro en posición de la señal ultrasónica están basados en posicionadores o “encoders” mecánicos de poca flexibilidad. En general estos están limitados a la inspección de piezas planas (con encoder lineales) , de curvatura limitada (encoder curvos) o sistemas a medida para la inspección de elementos de geometría variada, estos últimos se fabrican de forma expresa y personalizada para una aplicación particular. No se ha encontrado en el estudio del estado de la técnica realizado ningún sistema similar al propuesto que permita el posicionamiento de la sonda de ultrasonidos mediante un sistema inalámbrico basado en ninguna tecnología. Existen múltiples sistemas que realizan inspección de “no contacto” mediante visión (v.gr. FR2923606 (A1) – Nondestructively controlling welding point, by examining welding point surface using a camera, quantifying distribution of chromatic density/halo formed around crucible juntion, and comparing value determined at interval of reference value [“Control no destructivo de puntos de soldadura mediante examen de la superficie de soldadura utilizando una cámara, cuantificando la distribución de densidad cromática y halos formados alrededor de los puntos de unión y comparando los valores los valores determinados en intervalos frente a valores de referencia]) y diferentes técnicas de ultrasonidos (v.gr. RU2008130970 (A) - Non-destructive inspection method [“Método de inspección no destructivo”]) , como pueden ser los dispositivos “phased array” o los ultrasonidos láser, capaces de generar la vibración que provoca las ondas sonoras por impulsos láser, pero el objeto de la presente invención no es una mejora ni modificación en el sistema de ultrasonidos propiamente, y sería de aplicación a cualquiera de los mencionados anteriormente. Así mismo se han encontrado en la bibliografía diferentes propuestas para la realización de inspecciones utilizando metodología basada en luz, bien visible bien en otros rangos de frecuencias (v.gr. WO2007149050 – Method and apparatus for 3-Dimensional visión and inspection of ball and like protusions of electronic components [“Método y aparato para visión tridimensional e inspección de bolas y protusiones de componentes electrónicos”]) así como sistemas basados en visión o en láser (laser-scan) para la reconstrucción de modelos tridimensionales de piezas, pero tampoco es el objeto de la presente invención (v.gr. US 2009279772 – Method and system for identifying defects in NDT image data [“Método y sistema para identificar defectos en imágenes de datos de sistemas NDT”]) . EXPLICACIÓN DE LA INVENCIÓN La presente invención consiste esencialmente en un sistema para inspección de componentes por ultrasonidos que permite el registro en posición y actitud de los datos ultrasónicos obtenidos durante la inspección sin la necesidad de utilizar encoders u otros sistemas mecánicos o aparatosos y que en general no posibilitan la inspección flexible de distintas piezas de geometrías compleja con el mismo sistema. El sistema objeto de la invención consta principalmente de tres subsistemas y los interfaces necesarios para su integración y funcionamiento. Los tres subsistemas son: escáner de ultrasonidos para ensayos no destructivos, subsistema de posicionamiento a distancia, finalmente, el tercer subsistema, junto a los interfaces necesarios, es el que denominaremos subsistema de control. El principio de funcionamiento de la invención se basa en la posibilidad de obtener la posición y la orientación de la sonda de inspección de un escáner de ultrasonidos de forma precisa y sin necesidad de utilizar dispositivos mecánicos adicionales a la sonda emisora-receptora para determinar su posición y actitud. El subsistema de control permite la determinación de la posición y orientación de la sonda de inspección (ubicación del plano normal de inspección) de forma coordinada con la toma de medidas del escáner, consiguiendo así aparear medidas con posiciones y orientaciones obteniéndose los datos completos de la inspección (C-Scan) , este apareamiento no tiene por qué ser totalmente síncrono, en el sentido de que si la medida de la sonda de ultrasonidos se realiza entre dos adquisiciones de datos del sistema de posicionamiento, se pueden interpolar los datos para determinar la posición en el momento de la medida; si la frecuencia de muestreo es suficientemente alta, el error introducido al interpolar podrá considerarse no representativo. Estos datos, de posición y orientación de la sonda de medida por ultrasonidos junto con los datos obtenidos mediante el sistema de ultrasonidos, se almacenan en una base de datos que permite su acceso posterior para su estudio. Adicionalmente, se obtiene también un mapa preciso de las zonas inspeccionadas así como la orientación de la sonda durante la inspección, lo que permite parametrizar la superficie de la pieza objeto de la inspección localizando de forma precisa los posibles defectos hallados y teniendo una imagen en tres dimensiones de la pieza objeto de la inspección. El subsistema de control se encargará, además, de almacenar los datos de posición y orientación, debidamente apareados con los resultados de la inspección por ultrasonidos en una base de datos que permita retomar la inspección si se deja inacabada, recuperar los datos para análisis posteriores y, en general, tener acceso a los datos para poder transmitirlos o usarlos con posterioridad. El subsistema de control podemos dividirlo, a su vez, en tres subsistemas: el subsistema de adquisición de datos, el subsistema de coordinación, y el subsistema de almacenamiento. El subsistema de adquisición de datos será el encargado de recoger los datos enviados desde el sistema de cámaras así como desde el escáner de ultrasonidos. Este subsistema incluirá, además de la o las tarjetas de adquisición de datos necesarias, las interfaces para adaptar los datos desde las salidas de los otros dos sistemas para que puedan ser debidamente recogidos a través de las tarjetas de adquisición. El subsistema de coordinación es aquel que realiza la asociación entre los datos adquiridos por el sistema de cámaras y el escáner de ultrasonidos, así mismo proporcionará la señal de reloj que permita, bien sincronizar la toma de muestras o bien realizar la interpolación de los datos si la toma de muestras no se realiza de forma síncrona con la adquisición de posiciones y orientaciones de la sonda del escáner de ultrasonidos. El subsistema de control es también el encargado de determinar cómo y dónde se almacenan los datos así como de comandar el inicio y fin de la captura de datos. El subsistema de almacenamiento comprenderá una base de datos en la que se relacionarán los datos obtenidos con el escáner de ultrasonidos con las posiciones y orientaciones de la sonda medidas, o calculadas, en el momento de la medida con el escáner de ultrasonidos. DESCRIPCIÓN DE LAS FIGURAS Para complementar la descripción que se está realizando y con objeto de ayudar a una mejor comprensión de las características del invento, de acuerdo con un ejemplo preferente de realización práctica del mismo, se acompaña como parte integrante de dicha descripción, un juego de figuras en donde, con carácter ilustrativo y no limitativo, se ha representado lo siguiente: ¡Error! No se encuentra el origen de la referencia.Figura 1. Se representa un diagrama del sistema completo donde se pueden identificar el subsistema de control, el equipo de ensayos no destructivos por ultrasonidos (NDT) , el subsistema de posicionamiento a distancia, el objeto de la inspección (DUT) . ¡Error! No se encuentra el origen de la referencia.Figura 2. Se representa esquemáticamente el sistema de localización a distancia incluyendo cinco cámaras y cuatro marcadores sobre la sonda de inspección por ultrasonidos, aunque estrictamente serían necesarios tan sólo tres cámaras y tres marcadores para poder obtener los datos de posición y orientación de la pieza bajo seguimiento. En las figuras, los elementos numerados se detallan a continuación: – Pieza objeto de la inspección, DUT por sus siglas en inglés. 2 – Sonda de inspección por ultrasonido. 3 – Marcadores del sistema de localización a distancia. 4 – Escáner de ultrasonidos para ensayos no destructivos. 5 – Cámaras. 6 – Subsistema de control del sistema de localización a distancia. 7 – Subsistema de control. EJEMPLO DE REALIZACIÓN PREFERENTE Se describe a continuación un ejemplo de realización de la invención sin que dicha propuesta de realización suponga la opción óptima ni limite en manera alguna las posibilidades de realización de la misma. La invención, como se ha descrito anteriormente, consta de tres subsistemas principales: escáner de ultrasonidos para ensayos no destructivos (4) , subsistema de posicionamiento a distancia o de localización por visión compuesto por un conjunto de cámaras (5) , en el caso de este ejemplo de realización preferente, infrarrojas dotadas de un subsistema de control del sistema de localización a distancia (6) , y subsistema de comunicaciones, control, recogida y almacenamiento de datos (7) , más los interfaces necesarios para conectar entre sí los subsistemas (¡Error! No se encuentra el origen de la referencia.) . En la figura 2 se observa cómo el subsistema de posicionamiento a distancia o de localización por visión estará compuesto por un conjunto de cámaras (5) infrarrojas dotadas de un subsistema de control del sistema de localización a distancia (6) que permite identificar ciertos marcadores del sistema de localización a distancia (3) , los cuales deberán colocarse sobre la pieza a controlar, en este caso la sonda de inspección por ultrasonidos (2) en posición y orientación. El subsistema de posicionamiento a distancia o de localización por visión necesita de al menos tres cámaras (5) infrarrojas que tengan en línea de visión los marcadores del sistema de localización a distancia (3) en todo momento y al menos tres de estos marcadores del sistema de localización a distancia (3) para poder proporcionar información de la posición y orientación de la pieza. Para evitar pérdida de datos debido a posibles pérdidas de la línea de visión en algunos momentos se utilizará un sistema de al menos seis cámaras (5) infrarrojas y cinco marcadores del sistema de localización a distancia (3) en la sonda, garantizando la integridad de la señal en todo momento. Estas cantidades podrán variar en función de las dimensiones y geometrías de las salas y piezas a inspeccionar, pudiendo ser tan grandes como se requiera para garantizar la integridad de las señales en todo momento. El subsistema de escáner de ultrasonidos para ensayos no destructivos (4) consiste en un sistema con una sonda emisorareceptora de pulsos sonoros, o sonda de inspección por ultrasonidos (2) , a frecuencias ultrasónicas en el que analizando los tiempos de retardo de los ecos se obtiene información sobre las inter-fases internas del material y se pueden detectar anomalías respecto al patrón esperado. Para este tipo de dispositivos existen diversos modelos de sonda para la inspección, en esta realización, consideraremos una sonda phased array plana o mono-elemento por ser la más extendidas y estandarizadas, aunque no supone que sea limitativo de ninguna manera, toda la invención es igualmente válida para otros tipos de sondas “phased array” de geometrías especiales. El único requisito exigible al sistema de ultrasonidos es que sea capaz de proporcionar una salida de los datos en tiempo real, de manera que puedan ser almacenados y tratados en otro dispositivo, en este caso en un PC que formará parte del sistema de control de la invención. El subsistema de control (7) será el encargado de recoger los datos suministrados por los otros dos sistemas y aparearlos de manera apropiada de manera que se disponga de la información precisa de la posición y la orientación de la sonda de ultrasonidos para cada medida realizada. Además, el subsistema de control (7) se encarga también de gestionar el almacenamiento de los datos recibidos en una base de datos. Como ya se ha señalado, el subsistema de control (7) se divide, a su vez, en tres subsistemas: el subsistema de adquisición de datos, el subsistema de coordinación, y el subsistema de almacenamiento. El subsistema de adquisición de datos será el encargado de recoger los datos enviados desde el sistema de cámaras así como desde el escáner de ultrasonidos. Este subsistema incluirá, además de la o las tarjetas de adquisición de datos necesarias, las interfaces para adaptar los datos desde las salidas de los otros dos sistemas para que puedan ser debidamente recogidos a través de las tarjetas de adquisición. El subsistema de coordinación es aquel que realiza la asociación entre los datos adquiridos por el sistema de cámaras y el escáner de ultrasonidos, así mismo proporcionará la señal de reloj que permita, bien sincronizar la toma de muestras o bien realizar la interpolación de los datos si la toma de muestras no se realiza de forma síncrona con la adquisición de posiciones y orientaciones de la sonda del escáner de ultrasonidos. El subsistema de control (7) es también el encargado de determinar cómo y dónde se almacenan los datos así como de comandar el inicio y fin de la captura de datos. Los subsistemas de coordinación y almacenamiento podrán realizarse utilizando un PC, aunque puede implementarse también utilizando un micro-controlador, una FPGA u otros sistemas electrónicos que lo permitan. El subsistema de almacenamiento comprenderá una base de datos en la que se relacionarán los datos obtenidos con el escáner 5 de ultrasonidos con las posiciones y orientaciones de la sonda medidas, o calculadas, en el momento de la medida con el escáner de ultrasonidos. Dicha base de datos puede almacenarse en cualquier dispositivo de almacenamiento electrónico, en este caso, el disco duro del mismo PC que contiene el subsistema de los algoritmos de control y coordinación.
+ ES-2411811_B1 Sistema de inspección no destructiva por ultrasonidos para registro flexible con encoder inalámbrico. OBJETO DE LA INVENCIÓN La presente invención se refiere a un sistema para realizar inspecciones mediante la técnica de ultrasonidos utilizando un sistema inalámbrico para la adquisición de los datos ligados a la posición de la sonda (con la que se realiza la inspección) así como a su orientación espacial, permitiendo realizar un registro de la posición y señal ultrasónica de gran presión y exactitud. La presente invención se encuadra dentro del sector de la técnica de los ensayos no destructivos siendo su ámbito de aplicación los sectores aeronáutico, espacial, ferroviario, de la automoción, naval y de la construcción, principalmente. ESTADO DE LA TÉCNICA Los sistemas de inspección actuales con registro en posición de la señal ultrasónica están basados en posicionadores o “encoders” mecánicos de poca flexibilidad. En general estos están limitados a la inspección de piezas planas (con encoder lineales) , de curvatura limitada (encoder curvos) o sistemas a medida para la inspección de elementos de geometría variada, estos últimos se fabrican de forma expresa y personalizada para una aplicación particular. No se ha encontrado en el estudio del estado de la técnica realizado ningún sistema similar al propuesto que permita el posicionamiento de la sonda de ultrasonidos mediante un sistema inalámbrico basado en ninguna tecnología. Existen múltiples sistemas que realizan inspección de “no contacto” mediante visión (v.gr. FR2923606 (A1) – Nondestructively controlling welding point, by examining welding point surface using a camera, quantifying distribution of chromatic density/halo formed around crucible juntion, and comparing value determined at interval of reference value [“Control no destructivo de puntos de soldadura mediante examen de la superficie de soldadura utilizando una cámara, cuantificando la distribución de densidad cromática y halos formados alrededor de los puntos de unión y comparando los valores los valores determinados en intervalos frente a valores de referencia]) y diferentes técnicas de ultrasonidos (v.gr. RU2008130970 (A) - Non-destructive inspection method [“Método de inspección no destructivo”]) , como pueden ser los dispositivos “phased array” o los ultrasonidos láser, capaces de generar la vibración que provoca las ondas sonoras por impulsos láser, pero el objeto de la presente invención no es una mejora ni modificación en el sistema de ultrasonidos propiamente, y sería de aplicación a cualquiera de los mencionados anteriormente. Así mismo se han encontrado en la bibliografía diferentes propuestas para la realización de inspecciones utilizando metodología basada en luz, bien visible bien en otros rangos de frecuencias (v.gr. WO2007149050 – Method and apparatus for 3-Dimensional visión and inspection of ball and like protusions of electronic components [“Método y aparato para visión tridimensional e inspección de bolas y protusiones de componentes electrónicos”]) así como sistemas basados en visión o en láser (laser-scan) para la reconstrucción de modelos tridimensionales de piezas, pero tampoco es el objeto de la presente invención (v.gr. US 2009279772 – Method and system for identifying defects in NDT image data [“Método y sistema para identificar defectos en imágenes de datos de sistemas NDT”]) . EXPLICACIÓN DE LA INVENCIÓN La presente invención consiste esencialmente en un sistema para inspección de componentes por ultrasonidos que permite el registro en posición y actitud de los datos ultrasónicos obtenidos durante la inspección sin la necesidad de utilizar encoders u otros sistemas mecánicos o aparatosos y que en general no posibilitan la inspección flexible de distintas piezas de geometrías compleja con el mismo sistema. El sistema objeto de la invención consta principalmente de tres subsistemas y los interfaces necesarios para su integración y funcionamiento. Los tres subsistemas son: escáner de ultrasonidos para ensayos no destructivos, subsistema de posicionamiento a distancia, finalmente, el tercer subsistema, junto a los interfaces necesarios, es el que denominaremos subsistema de control. El principio de funcionamiento de la invención se basa en la posibilidad de obtener la posición y la orientación de la sonda de inspección de un escáner de ultrasonidos de forma precisa y sin necesidad de utilizar dispositivos mecánicos adicionales a la sonda emisora-receptora para determinar su posición y actitud. El subsistema de control permite la determinación de la posición y orientación de la sonda de inspección (ubicación del plano normal de inspección) de forma coordinada con la toma de medidas del escáner, consiguiendo así aparear medidas con posiciones y orientaciones obteniéndose los datos completos de la inspección (C-Scan) , este apareamiento no tiene por qué ser totalmente síncrono, en el sentido de que si la medida de la sonda de ultrasonidos se realiza entre dos adquisiciones de datos del sistema de posicionamiento, se pueden interpolar los datos para determinar la posición en el momento de la medida; si la frecuencia de muestreo es suficientemente alta, el error introducido al interpolar podrá considerarse no representativo. Estos datos, de posición y orientación de la sonda de medida por ultrasonidos junto con los datos obtenidos mediante el sistema de ultrasonidos, se almacenan en una base de datos que permite su acceso posterior para su estudio. Adicionalmente, se obtiene también un mapa preciso de las zonas inspeccionadas así como la orientación de la sonda durante la inspección, lo que permite parametrizar la superficie de la pieza objeto de la inspección localizando de forma precisa los posibles defectos hallados y teniendo una imagen en tres dimensiones de la pieza objeto de la inspección. El subsistema de control se encargará, además, de almacenar los datos de posición y orientación, debidamente apareados con los resultados de la inspección por ultrasonidos en una base de datos que permita retomar la inspección si se deja inacabada, recuperar los datos para análisis posteriores y, en general, tener acceso a los datos para poder transmitirlos o usarlos con posterioridad. El subsistema de control podemos dividirlo, a su vez, en tres subsistemas: el subsistema de adquisición de datos, el subsistema de coordinación, y el subsistema de almacenamiento. El subsistema de adquisición de datos será el encargado de recoger los datos enviados desde el sistema de cámaras así como desde el escáner de ultrasonidos. Este subsistema incluirá, además de la o las tarjetas de adquisición de datos necesarias, las interfaces para adaptar los datos desde las salidas de los otros dos sistemas para que puedan ser debidamente recogidos a través de las tarjetas de adquisición. El subsistema de coordinación es aquel que realiza la asociación entre los datos adquiridos por el sistema de cámaras y el escáner de ultrasonidos, así mismo proporcionará la señal de reloj que permita, bien sincronizar la toma de muestras o bien realizar la interpolación de los datos si la toma de muestras no se realiza de forma síncrona con la adquisición de posiciones y orientaciones de la sonda del escáner de ultrasonidos. El subsistema de control es también el encargado de determinar cómo y dónde se almacenan los datos así como de comandar el inicio y fin de la captura de datos. El subsistema de almacenamiento comprenderá una base de datos en la que se relacionarán los datos obtenidos con el escáner de ultrasonidos con las posiciones y orientaciones de la sonda medidas, o calculadas, en el momento de la medida con el escáner de ultrasonidos. DESCRIPCIÓN DE LAS FIGURAS Para complementar la descripción que se está realizando y con objeto de ayudar a una mejor comprensión de las características del invento, de acuerdo con un ejemplo preferente de realización práctica del mismo, se acompaña como parte integrante de dicha descripción, un juego de figuras en donde, con carácter ilustrativo y no limitativo, se ha representado lo siguiente: ¡Error! No se encuentra el origen de la referencia.Figura 1. Se representa un diagrama del sistema completo donde se pueden identificar el subsistema de control, el equipo de ensayos no destructivos por ultrasonidos (NDT) , el subsistema de posicionamiento a distancia, el objeto de la inspección (DUT) . ¡Error! No se encuentra el origen de la referencia.Figura 2. Se representa esquemáticamente el sistema de localización a distancia incluyendo cinco cámaras y cuatro marcadores sobre la sonda de inspección por ultrasonidos, aunque estrictamente serían necesarios tan sólo tres cámaras y tres marcadores para poder obtener los datos de posición y orientación de la pieza bajo seguimiento. En las figuras, los elementos numerados se detallan a continuación: – Pieza objeto de la inspección, DUT por sus siglas en inglés. 2 – Sonda de inspección por ultrasonido. 3 – Marcadores del sistema de localización a distancia. 4 – Escáner de ultrasonidos para ensayos no destructivos. 5 – Cámaras. 6 – Subsistema de control del sistema de localización a distancia. 7 – Subsistema de control. EJEMPLO DE REALIZACIÓN PREFERENTE Se describe a continuación un ejemplo de realización de la invención sin que dicha propuesta de realización suponga la opción óptima ni limite en manera alguna las posibilidades de realización de la misma. La invención, como se ha descrito anteriormente, consta de tres subsistemas principales: escáner de ultrasonidos para ensayos no destructivos (4) , subsistema de posicionamiento a distancia o de localización por visión compuesto por un conjunto de cámaras (5) , en el caso de este ejemplo de realización preferente, infrarrojas dotadas de un subsistema de control del sistema de localización a distancia (6) , y subsistema de comunicaciones, control, recogida y almacenamiento de datos (7) , más los interfaces necesarios para conectar entre sí los subsistemas (¡Error! No se encuentra el origen de la referencia.) . En la figura 2 se observa cómo el subsistema de posicionamiento a distancia o de localización por visión estará compuesto por un conjunto de cámaras (5) infrarrojas dotadas de un subsistema de control del sistema de localización a distancia (6) que permite identificar ciertos marcadores del sistema de localización a distancia (3) , los cuales deberán colocarse sobre la pieza a controlar, en este caso la sonda de inspección por ultrasonidos (2) en posición y orientación. El subsistema de posicionamiento a distancia o de localización por visión necesita de al menos tres cámaras (5) infrarrojas que tengan en línea de visión los marcadores del sistema de localización a distancia (3) en todo momento y al menos tres de estos marcadores del sistema de localización a distancia (3) para poder proporcionar información de la posición y orientación de la pieza. Para evitar pérdida de datos debido a posibles pérdidas de la línea de visión en algunos momentos se utilizará un sistema de al menos seis cámaras (5) infrarrojas y cinco marcadores del sistema de localización a distancia (3) en la sonda, garantizando la integridad de la señal en todo momento. Estas cantidades podrán variar en función de las dimensiones y geometrías de las salas y piezas a inspeccionar, pudiendo ser tan grandes como se requiera para garantizar la integridad de las señales en todo momento. El subsistema de escáner de ultrasonidos para ensayos no destructivos (4) consiste en un sistema con una sonda emisorareceptora de pulsos sonoros, o sonda de inspección por ultrasonidos (2) , a frecuencias ultrasónicas en el que analizando los tiempos de retardo de los ecos se obtiene información sobre las inter-fases internas del material y se pueden detectar anomalías respecto al patrón esperado. Para este tipo de dispositivos existen diversos modelos de sonda para la inspección, en esta realización, consideraremos una sonda phased array plana o mono-elemento por ser la más extendidas y estandarizadas, aunque no supone que sea limitativo de ninguna manera, toda la invención es igualmente válida para otros tipos de sondas “phased array” de geometrías especiales. El único requisito exigible al sistema de ultrasonidos es que sea capaz de proporcionar una salida de los datos en tiempo real, de manera que puedan ser almacenados y tratados en otro dispositivo, en este caso en un PC que formará parte del sistema de control de la invención. El subsistema de control (7) será el encargado de recoger los datos suministrados por los otros dos sistemas y aparearlos de manera apropiada de manera que se disponga de la información precisa de la posición y la orientación de la sonda de ultrasonidos para cada medida realizada. Además, el subsistema de control (7) se encarga también de gestionar el almacenamiento de los datos recibidos en una base de datos. Como ya se ha señalado, el subsistema de control (7) se divide, a su vez, en tres subsistemas: el subsistema de adquisición de datos, el subsistema de coordinación, y el subsistema de almacenamiento. El subsistema de adquisición de datos será el encargado de recoger los datos enviados desde el sistema de cámaras así como desde el escáner de ultrasonidos. Este subsistema incluirá, además de la o las tarjetas de adquisición de datos necesarias, las interfaces para adaptar los datos desde las salidas de los otros dos sistemas para que puedan ser debidamente recogidos a través de las tarjetas de adquisición. El subsistema de coordinación es aquel que realiza la asociación entre los datos adquiridos por el sistema de cámaras y el escáner de ultrasonidos, así mismo proporcionará la señal de reloj que permita, bien sincronizar la toma de muestras o bien realizar la interpolación de los datos si la toma de muestras no se realiza de forma síncrona con la adquisición de posiciones y orientaciones de la sonda del escáner de ultrasonidos. El subsistema de control (7) es también el encargado de determinar cómo y dónde se almacenan los datos así como de comandar el inicio y fin de la captura de datos. Los subsistemas de coordinación y almacenamiento podrán realizarse utilizando un PC, aunque puede implementarse también utilizando un micro-controlador, una FPGA u otros sistemas electrónicos que lo permitan. El subsistema de almacenamiento comprenderá una base de datos en la que se relacionarán los datos obtenidos con el escáner 5 de ultrasonidos con las posiciones y orientaciones de la sonda medidas, o calculadas, en el momento de la medida con el escáner de ultrasonidos. Dicha base de datos puede almacenarse en cualquier dispositivo de almacenamiento electrónico, en este caso, el disco duro del mismo PC que contiene el subsistema de los algoritmos de control y coordinación.
Publicaciones:
ES2411811 (08/07/2013) - A2 Solicitud de patente sin informe sobre el estado de la técnica
ES2411811 (13/12/2013) - R1 Informe sobre el estado de la técnica
ES2411811 (09/07/2014) - B1 Patente de invención
Eventos:
En fecha 30/12/2011 se realizó Registro Instancia de Solicitud
En fecha 10/01/2012 se realizó Admisión a Trámite
En fecha 10/01/2012 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 28/01/2013 se realizó Continuación del Procedimiento
En fecha 07/02/2013 se realizó Publicación Continuación del Procedimiento
En fecha 19/02/2013 se realizó IET1_Petición Realización IET
En fecha 08/07/2013 se realizó Publicación Solicitud
En fecha 08/07/2013 se realizó Publicación Folleto Solicitud (A2)
En fecha 28/11/2013 se realizó Realizado IET
En fecha 29/11/2013 se realizó 1109P_Comunicación Traslado del IET
En fecha 13/12/2013 se realizó Publicación IET
En fecha 13/12/2013 se realizó Publicación Folleto IET (R1)
En fecha 14/01/2014 se realizó Reanudación Procedimiento General de Concesión
En fecha 20/01/2014 se realizó Publicación Reanudación Procedimiento General de Concesión
En fecha 10/04/2014 se realizó Publicación Traslado Observaciones del IET
En fecha 02/07/2014 se realizó Sin Modificación de Reivindicaciones
En fecha 02/07/2014 se realizó Concesión
En fecha 02/07/2014 se realizó 1203P_Notificación Concesión por Procedimiento General de Concesión
En fecha 09/07/2014 se realizó Publicación concesión Patente PGC
En fecha 09/07/2014 se realizó Publicación Folleto Concesión
En fecha 06/11/2014 se realizó Entrega título
En fecha 10/12/2014 se realizó 3406X_Solicitud Correcciones
Pagos:
19/02/2013 - Pago Tasas IET
03/10/2014 - Pago Tasas Concesión
03/10/2014 - Pago 03 Anualidad
13/11/2014 - Pago 04 Anualidad
07/10/2015 - Pago 05 Anualidad
30/09/2016 - Pago 06 Anualidad
01/02/2018 - Pago 07 Anualidad
11/01/2019 - Pago 08 Anualidad
20/01/2020 - Pago 09 Anualidad
13/01/2021 - Bono en Pago 10 Anualidad (B2)
13/01/2021 - Pago 10 Anualidad
17/01/2022 - Bono en Pago 11 Anualidad (B2)
17/01/2022 - Pago 11 Anualidad
01/02/2023 - Pago 12 Anualidad
08/01/2024 - Pago 13 Anualidad
+ ES-2411811_A21. Sistema de inspección no destructiva por ultrasonidos para registro flexible con encoder inalámbrico caracterizado por estar integrado por tres subsistemas: subsistema consistente en escáner de ultrasonidos para ensayos no destructivos, subsistema de posicionamiento a distancia y subsistema de comunicaciones, control, recogida y almacenamiento de datos, , más los interfaces necesarios para conectar entre sí los mismos. 2. Sistema de inspección no destructiva por ultrasonidos para registro flexible con encoder inalámbrico de acuerdo con la reivindicación 1, caracterizado porque el escáner de ultrasonidos para ensayos no destructivos consiste en una sonda emisora-receptora de pulsos sonoros a frecuencias ultrasónicas en el que, analizando los tiempos de retardo de los ecos, se obtiene información sobre las inter-fases internas del material y se pueden detectar anomalías respecto al patrón esperado. 3. Sistema de inspección no destructiva por ultrasonidos para registro flexible con encoder inalámbrico de acuerdo con la reivindicación 1 y 2, caracterizado porque el subsistema de posicionamiento a distancia está compuesto por un conjunto de cámaras dotadas de un sistema de control de identificación de marcadores colocados sobre la pieza a controlar en posición y orientación. 4. Sistema de inspección no destructiva por ultrasonidos para registro flexible con encoder inalámbrico de acuerdo con la reivindicación 1, 2 y 3, caracterizado porque el subsistema de control será el encargado de recoger los datos suministrados por los otros dos subsistemas y aparearlos con objeto de recabar la información precisa de la posición y la orientación de la sonda de ultrasonidos para cada medida realizada. El subsistema de control gestiona el almacenamiento de los datos recibidos en una base de datos, y determina el modo y lugar de almacenamiento de los datos así como determina el inicio y fin de la captura de datos. 5. Sistema de inspección no destructiva por ultrasonidos para registro flexible con encoder inalámbrico de acuerdo con la reivindicación 4, caracterizado porque el subsistema de control se divide, a su vez, en tres subsistemas: el subsistema de adquisición de datos, el subsistema de coordinación, y el subsistema de almacenamiento. El subsistema de adquisición de datos recoge los datos enviados desde el sistema de cámaras así como desde el escáner de ultrasonidos. El subsistema de adquisición incluye, además de la o las tarjetas de adquisición de datos necesarias, las interfaces para adaptar los datos desde las salidas de los otros dos sistemas para que puedan ser debidamente recogidos a través de las tarjetas de adquisición. El subsistema de coordinación realiza la asociación entre los datos adquiridos por el sistema de cámaras y el escáner de ultrasonidos, y proporciona la señal de reloj para la sincronización de la toma de muestras o, en su caso, para la interpolación de los datos si la toma de muestras no se realiza de forma síncrona con la adquisición de posiciones y orientaciones de la sonda del escáner de ultrasonidos. El subsistema de almacenamiento comprenderá una base de datos en la que se relacionan los datos obtenidos con el escáner de ultrasonidos con las posiciones y orientaciones de la sonda medidas, o calculadas, en el momento de la medida con el escáner de ultrasonidos. Dicha base de datos puede almacenarse en cualquier dispositivo de almacenamiento electrónico que contenga el subsistema de los algoritmos de control y coordinación.
+ ES-2411811_B11. Sistema de inspección no destructiva por ultrasonidos para registro flexible con encoder inalámbrico caracterizado por estar integrado por tres subsistemas: subsistema consistente en escáner de ultrasonidos para ensayos no destructivos, subsistema de posicionamiento a distancia y subsistema de comunicaciones, control, recogida y almacenamiento de datos, , más los interfaces necesarios para conectar entre sí los mismos. 2. Sistema de inspección no destructiva por ultrasonidos para registro flexible con encoder inalámbrico de acuerdo con la reivindicación 1, caracterizado porque el escáner de ultrasonidos para ensayos no destructivos consiste en una sonda emisora-receptora de pulsos sonoros a frecuencias ultrasónicas en el que, analizando los tiempos de retardo de los ecos, se obtiene información sobre las inter-fases internas del material y se pueden detectar anomalías respecto al patrón esperado. 3. Sistema de inspección no destructiva por ultrasonidos para registro flexible con encoder inalámbrico de acuerdo con la reivindicación 1 y 2, caracterizado porque el subsistema de posicionamiento a distancia está compuesto por un conjunto de cámaras dotadas de un sistema de control de identificación de marcadores colocados sobre la pieza a controlar en posición y orientación. 4. Sistema de inspección no destructiva por ultrasonidos para registro flexible con encoder inalámbrico de acuerdo con la reivindicación 1, 2 y 3, caracterizado porque el subsistema de control será el encargado de recoger los datos suministrados por los otros dos subsistemas y aparearlos con objeto de recabar la información precisa de la posición y la orientación de la sonda de ultrasonidos para cada medida realizada. El subsistema de control gestiona el almacenamiento de los datos recibidos en una base de datos, y determina el modo y lugar de almacenamiento de los datos así como determina el inicio y fin de la captura de datos. 5. Sistema de inspección no destructiva por ultrasonidos para registro flexible con encoder inalámbrico de acuerdo con la reivindicación 4, caracterizado porque el subsistema de control se divide, a su vez, en tres subsistemas: el subsistema de adquisición de datos, el subsistema de coordinación, y el subsistema de almacenamiento. El subsistema de adquisición de datos recoge los datos enviados desde el sistema de cámaras así como desde el escáner de ultrasonidos. El subsistema de adquisición incluye, además de la o las tarjetas de adquisición de datos necesarias, las interfaces para adaptar los datos desde las salidas de los otros dos sistemas para que puedan ser debidamente recogidos a través de las tarjetas de adquisición. El subsistema de coordinación realiza la asociación entre los datos adquiridos por el sistema de cámaras y el escáner de ultrasonidos, y proporciona la señal de reloj para la sincronización de la toma de muestras o, en su caso, para la interpolación de los datos si la toma de muestras no se realiza de forma síncrona con la adquisición de posiciones y orientaciones de la sonda del escáner de ultrasonidos. El subsistema de almacenamiento comprenderá una base de datos en la que se relacionan los datos obtenidos con el escáner de ultrasonidos con las posiciones y orientaciones de la sonda medidas, o calculadas, en el momento de la medida con el escáner de ultrasonidos. Dicha base de datos puede almacenarse en cualquier dispositivo de almacenamiento electrónico que contenga el subsistema de los algoritmos de control y coordinación. OFICINA ESPAÑOLA DE PATENTES Y MARCAS Nº solicitud: 201132145 ESPAÑA Fecha de presentación de la solicitud: 30.12.2011 Fecha de prioridad: INFORME SOBRE EL ESTADO DE LA TECNICA 51 Int. Cl. : G01B17/00 (2006.01) G01S15/00 (2006.01) DOCUMENTOS RELEVANTES Categoría 56 Documentos citados Reivindicaciones afectadas X PATRUNO F.; ALIVERTI A.; DELLACÃ? R. L.; BURNS D.; PEDOTTI A.. "Redundant System of Passive Markers for Ultrasound Scanhead Tracking". IEEE Transactions On Biomedical Engineering, 20050101 IEEE Service Center, Piscataway, NJ, USA 01.01.2005 Vol: 52 No: 1 Pags. 8. 96 XP011123749 ISSN 0018-9294. 1-5 A WO 2004019799 A2 (COMPUTERIZED MED SYST INC et al.) 11.03.2004 1-5 Categoría de los documentos citados X: de particular relevancia Y: de particular relevancia combinado con otro/s de la misma categoría A: refleja el estado de la técnica O: referido a divulgación no escrita P: publicado entre la fecha de prioridad y la de presentación de la solicitud E: documento anterior, pero publicado después de la fecha de presentación de la solicitud El presente informe ha sido realizado • para todas las reivindicaciones • para las reivindicaciones nº : Fecha de realización del informe 27.11.2013 Examinador J. Botella Maldonado Página 1/4 INFORME DEL ESTADO DE LA TÉCNICA Nº de solicitud: 201132145 Documentación mínima buscada (sistema de clasificación seguido de los símbolos de clasificación) G01B, G01S Bases de datos electrónicas consultadas durante la búsqueda (nombre de la base de datos y, si es posible, términos de búsqueda utilizados) INVENES, EPODOC, WPI, NPL, XPESP, XPAIP, XPI3E, INSPEC. Informe del Estado de la Técnica Página 2/4 OPINIÓN ESCRITA Nº de solicitud: 201132145 Fecha de Realización de la Opinión Escrita: 27.11.2013 Declaración Novedad (Art. 6.1 LP 11/1986) Reivindicaciones Reivindicaciones 1-5 SI NO Actividad inventiva (Art. 8.1 LP11/1986) Reivindicaciones Reivindicaciones 1-5 SI NO Se considera que la solicitud cumple con el requisito de aplicación industrial. Este requisito fue evaluado durante la fase de examen formal y técnico de la solicitud (Artículo 31.2 Ley 11/1986) . Base de la Opinión. La presente opinión se ha realizado sobre la base de la solicitud de patente tal y como se publica. Informe del Estado de la Técnica Página 3/4 OPINIÓN ESCRITA Nº de solicitud: 201132145 1. Documentos considerados. A continuación se relacionan los documentos pertenecientes al estado de la técnica tomados en consideración para la realización de esta opinión. Documento Número Publicación o Identificación Fecha Publicación D01 PATRUNO F.; ALIVERTI A.; DELLACÃ? R. L.; BURNS D.; Pedotti A.. "Redundant System of Passive Markers for Ultrasound Scanhead Tracking". IEEE Transactions On Biomedical Engineering, 20050101 IEEE Service Center, Piscataway, NJ, USA 01.01.2005 Vol: 52 No: 1 Pags. 8. 96 XP011123749 ISSN 0018-9294. 01.01.2005 D02 WO 2004019799 A2 (COMPUTERIZED MED SYST INC et al.) 11.03.2004 2. Declaración motivada según los artículos 29.6 y 29.7 del Reglamento de ejecución de la Ley 11/1986, de 20 de marzo, de Patentes sobre la novedad y la actividad inventiva; citas y explicaciones en apoyo de esta declaración Los sistemas de seguimiento posicional de una sonda de ultrasonidos basados en un sistema de sensado de posición optoelectrónico (OE) con marcadores activos o pasivos utilizan múltiples cámaras de TV sincronizadas con el parpadeo de la escena y un hardware especializado que reconoce los marcadores en cada cámara y mediante técnicas stereofotogramétricas calcula con gran exactitud la localización 3-D de cada marcador. En el documento D01 se presenta un método para el rastreo posicional de una sonda de ultrasonidos basado en un sistema OE con marcadores pasivos en el que un conjunto de procedimientos mejoran la localización de la sonda y evitan las posibles omisiones en la detección de los marcadores. El documento D02 presenta un sistema para localizar la posición y orientación de una sonda de ultrasonidos. El sistema utiliza una cámara, asociada a la sonda en una posición respecto a ella conocida y cuyo campo de visión contiene una serie de marcadores situados guardando entre ellos una determinada relación espacial. La posición de la sonda puede determinarse a través de las imágenes del grupo de marcadores que va obteniendo la cámara en su movimiento vinculado al de la sonda. Consideramos que el objeto de la invención recogido en las reivindicaciones de la 1ª a la 5ª deriva directamente y sin equívoco del documento D01 por haber sido divulgado en él, como en las reivindicaciones 1ª, 2ª y 3ª o por ser meras ejecuciones particulares obvias o fácilmente deducibles para un experto en la materia, como ocurre en las reivindicaciones 4ª y 5ª. Por lo tanto el objeto de la invención tal como se reivindica en las reivindicaciones de la 1ª a la 5ª, no es nuevo ni tiene actividad inventiva. Informe del Estado de la Técnica Página 4/4
Los productos y servicios protegidos por este registro son:
G01B 17/00 - G01S 15/00
Descripciones:
+ ES-2411811_A2 Sistema de inspección no destructiva por ultrasonidos para registro flexible con encoder inalámbrico. OBJETO DE LA INVENCIÓN La presente invención se refiere a un sistema para realizar inspecciones mediante la técnica de ultrasonidos utilizando un sistema inalámbrico para la adquisición de los datos ligados a la posición de la sonda (con la que se realiza la inspección) así como a su orientación espacial, permitiendo realizar un registro de la posición y señal ultrasónica de gran presión y exactitud. La presente invención se encuadra dentro del sector de la técnica de los ensayos no destructivos siendo su ámbito de aplicación los sectores aeronáutico, espacial, ferroviario, de la automoción, naval y de la construcción, principalmente. ESTADO DE LA TÉCNICA Los sistemas de inspección actuales con registro en posición de la señal ultrasónica están basados en posicionadores o “encoders” mecánicos de poca flexibilidad. En general estos están limitados a la inspección de piezas planas (con encoder lineales) , de curvatura limitada (encoder curvos) o sistemas a medida para la inspección de elementos de geometría variada, estos últimos se fabrican de forma expresa y personalizada para una aplicación particular. No se ha encontrado en el estudio del estado de la técnica realizado ningún sistema similar al propuesto que permita el posicionamiento de la sonda de ultrasonidos mediante un sistema inalámbrico basado en ninguna tecnología. Existen múltiples sistemas que realizan inspección de “no contacto” mediante visión (v.gr. FR2923606 (A1) – Nondestructively controlling welding point, by examining welding point surface using a camera, quantifying distribution of chromatic density/halo formed around crucible juntion, and comparing value determined at interval of reference value [“Control no destructivo de puntos de soldadura mediante examen de la superficie de soldadura utilizando una cámara, cuantificando la distribución de densidad cromática y halos formados alrededor de los puntos de unión y comparando los valores los valores determinados en intervalos frente a valores de referencia]) y diferentes técnicas de ultrasonidos (v.gr. RU2008130970 (A) - Non-destructive inspection method [“Método de inspección no destructivo”]) , como pueden ser los dispositivos “phased array” o los ultrasonidos láser, capaces de generar la vibración que provoca las ondas sonoras por impulsos láser, pero el objeto de la presente invención no es una mejora ni modificación en el sistema de ultrasonidos propiamente, y sería de aplicación a cualquiera de los mencionados anteriormente. Así mismo se han encontrado en la bibliografía diferentes propuestas para la realización de inspecciones utilizando metodología basada en luz, bien visible bien en otros rangos de frecuencias (v.gr. WO2007149050 – Method and apparatus for 3-Dimensional visión and inspection of ball and like protusions of electronic components [“Método y aparato para visión tridimensional e inspección de bolas y protusiones de componentes electrónicos”]) así como sistemas basados en visión o en láser (laser-scan) para la reconstrucción de modelos tridimensionales de piezas, pero tampoco es el objeto de la presente invención (v.gr. US 2009279772 – Method and system for identifying defects in NDT image data [“Método y sistema para identificar defectos en imágenes de datos de sistemas NDT”]) . EXPLICACIÓN DE LA INVENCIÓN La presente invención consiste esencialmente en un sistema para inspección de componentes por ultrasonidos que permite el registro en posición y actitud de los datos ultrasónicos obtenidos durante la inspección sin la necesidad de utilizar encoders u otros sistemas mecánicos o aparatosos y que en general no posibilitan la inspección flexible de distintas piezas de geometrías compleja con el mismo sistema. El sistema objeto de la invención consta principalmente de tres subsistemas y los interfaces necesarios para su integración y funcionamiento. Los tres subsistemas son: escáner de ultrasonidos para ensayos no destructivos, subsistema de posicionamiento a distancia, finalmente, el tercer subsistema, junto a los interfaces necesarios, es el que denominaremos subsistema de control. El principio de funcionamiento de la invención se basa en la posibilidad de obtener la posición y la orientación de la sonda de inspección de un escáner de ultrasonidos de forma precisa y sin necesidad de utilizar dispositivos mecánicos adicionales a la sonda emisora-receptora para determinar su posición y actitud. El subsistema de control permite la determinación de la posición y orientación de la sonda de inspección (ubicación del plano normal de inspección) de forma coordinada con la toma de medidas del escáner, consiguiendo así aparear medidas con posiciones y orientaciones obteniéndose los datos completos de la inspección (C-Scan) , este apareamiento no tiene por qué ser totalmente síncrono, en el sentido de que si la medida de la sonda de ultrasonidos se realiza entre dos adquisiciones de datos del sistema de posicionamiento, se pueden interpolar los datos para determinar la posición en el momento de la medida; si la frecuencia de muestreo es suficientemente alta, el error introducido al interpolar podrá considerarse no representativo. Estos datos, de posición y orientación de la sonda de medida por ultrasonidos junto con los datos obtenidos mediante el sistema de ultrasonidos, se almacenan en una base de datos que permite su acceso posterior para su estudio. Adicionalmente, se obtiene también un mapa preciso de las zonas inspeccionadas así como la orientación de la sonda durante la inspección, lo que permite parametrizar la superficie de la pieza objeto de la inspección localizando de forma precisa los posibles defectos hallados y teniendo una imagen en tres dimensiones de la pieza objeto de la inspección. El subsistema de control se encargará, además, de almacenar los datos de posición y orientación, debidamente apareados con los resultados de la inspección por ultrasonidos en una base de datos que permita retomar la inspección si se deja inacabada, recuperar los datos para análisis posteriores y, en general, tener acceso a los datos para poder transmitirlos o usarlos con posterioridad. El subsistema de control podemos dividirlo, a su vez, en tres subsistemas: el subsistema de adquisición de datos, el subsistema de coordinación, y el subsistema de almacenamiento. El subsistema de adquisición de datos será el encargado de recoger los datos enviados desde el sistema de cámaras así como desde el escáner de ultrasonidos. Este subsistema incluirá, además de la o las tarjetas de adquisición de datos necesarias, las interfaces para adaptar los datos desde las salidas de los otros dos sistemas para que puedan ser debidamente recogidos a través de las tarjetas de adquisición. El subsistema de coordinación es aquel que realiza la asociación entre los datos adquiridos por el sistema de cámaras y el escáner de ultrasonidos, así mismo proporcionará la señal de reloj que permita, bien sincronizar la toma de muestras o bien realizar la interpolación de los datos si la toma de muestras no se realiza de forma síncrona con la adquisición de posiciones y orientaciones de la sonda del escáner de ultrasonidos. El subsistema de control es también el encargado de determinar cómo y dónde se almacenan los datos así como de comandar el inicio y fin de la captura de datos. El subsistema de almacenamiento comprenderá una base de datos en la que se relacionarán los datos obtenidos con el escáner de ultrasonidos con las posiciones y orientaciones de la sonda medidas, o calculadas, en el momento de la medida con el escáner de ultrasonidos. DESCRIPCIÓN DE LAS FIGURAS Para complementar la descripción que se está realizando y con objeto de ayudar a una mejor comprensión de las características del invento, de acuerdo con un ejemplo preferente de realización práctica del mismo, se acompaña como parte integrante de dicha descripción, un juego de figuras en donde, con carácter ilustrativo y no limitativo, se ha representado lo siguiente: ¡Error! No se encuentra el origen de la referencia.Figura 1. Se representa un diagrama del sistema completo donde se pueden identificar el subsistema de control, el equipo de ensayos no destructivos por ultrasonidos (NDT) , el subsistema de posicionamiento a distancia, el objeto de la inspección (DUT) . ¡Error! No se encuentra el origen de la referencia.Figura 2. Se representa esquemáticamente el sistema de localización a distancia incluyendo cinco cámaras y cuatro marcadores sobre la sonda de inspección por ultrasonidos, aunque estrictamente serían necesarios tan sólo tres cámaras y tres marcadores para poder obtener los datos de posición y orientación de la pieza bajo seguimiento. En las figuras, los elementos numerados se detallan a continuación: – Pieza objeto de la inspección, DUT por sus siglas en inglés. 2 – Sonda de inspección por ultrasonido. 3 – Marcadores del sistema de localización a distancia. 4 – Escáner de ultrasonidos para ensayos no destructivos. 5 – Cámaras. 6 – Subsistema de control del sistema de localización a distancia. 7 – Subsistema de control. EJEMPLO DE REALIZACIÓN PREFERENTE Se describe a continuación un ejemplo de realización de la invención sin que dicha propuesta de realización suponga la opción óptima ni limite en manera alguna las posibilidades de realización de la misma. La invención, como se ha descrito anteriormente, consta de tres subsistemas principales: escáner de ultrasonidos para ensayos no destructivos (4) , subsistema de posicionamiento a distancia o de localización por visión compuesto por un conjunto de cámaras (5) , en el caso de este ejemplo de realización preferente, infrarrojas dotadas de un subsistema de control del sistema de localización a distancia (6) , y subsistema de comunicaciones, control, recogida y almacenamiento de datos (7) , más los interfaces necesarios para conectar entre sí los subsistemas (¡Error! No se encuentra el origen de la referencia.) . En la figura 2 se observa cómo el subsistema de posicionamiento a distancia o de localización por visión estará compuesto por un conjunto de cámaras (5) infrarrojas dotadas de un subsistema de control del sistema de localización a distancia (6) que permite identificar ciertos marcadores del sistema de localización a distancia (3) , los cuales deberán colocarse sobre la pieza a controlar, en este caso la sonda de inspección por ultrasonidos (2) en posición y orientación. El subsistema de posicionamiento a distancia o de localización por visión necesita de al menos tres cámaras (5) infrarrojas que tengan en línea de visión los marcadores del sistema de localización a distancia (3) en todo momento y al menos tres de estos marcadores del sistema de localización a distancia (3) para poder proporcionar información de la posición y orientación de la pieza. Para evitar pérdida de datos debido a posibles pérdidas de la línea de visión en algunos momentos se utilizará un sistema de al menos seis cámaras (5) infrarrojas y cinco marcadores del sistema de localización a distancia (3) en la sonda, garantizando la integridad de la señal en todo momento. Estas cantidades podrán variar en función de las dimensiones y geometrías de las salas y piezas a inspeccionar, pudiendo ser tan grandes como se requiera para garantizar la integridad de las señales en todo momento. El subsistema de escáner de ultrasonidos para ensayos no destructivos (4) consiste en un sistema con una sonda emisorareceptora de pulsos sonoros, o sonda de inspección por ultrasonidos (2) , a frecuencias ultrasónicas en el que analizando los tiempos de retardo de los ecos se obtiene información sobre las inter-fases internas del material y se pueden detectar anomalías respecto al patrón esperado. Para este tipo de dispositivos existen diversos modelos de sonda para la inspección, en esta realización, consideraremos una sonda phased array plana o mono-elemento por ser la más extendidas y estandarizadas, aunque no supone que sea limitativo de ninguna manera, toda la invención es igualmente válida para otros tipos de sondas “phased array” de geometrías especiales. El único requisito exigible al sistema de ultrasonidos es que sea capaz de proporcionar una salida de los datos en tiempo real, de manera que puedan ser almacenados y tratados en otro dispositivo, en este caso en un PC que formará parte del sistema de control de la invención. El subsistema de control (7) será el encargado de recoger los datos suministrados por los otros dos sistemas y aparearlos de manera apropiada de manera que se disponga de la información precisa de la posición y la orientación de la sonda de ultrasonidos para cada medida realizada. Además, el subsistema de control (7) se encarga también de gestionar el almacenamiento de los datos recibidos en una base de datos. Como ya se ha señalado, el subsistema de control (7) se divide, a su vez, en tres subsistemas: el subsistema de adquisición de datos, el subsistema de coordinación, y el subsistema de almacenamiento. El subsistema de adquisición de datos será el encargado de recoger los datos enviados desde el sistema de cámaras así como desde el escáner de ultrasonidos. Este subsistema incluirá, además de la o las tarjetas de adquisición de datos necesarias, las interfaces para adaptar los datos desde las salidas de los otros dos sistemas para que puedan ser debidamente recogidos a través de las tarjetas de adquisición. El subsistema de coordinación es aquel que realiza la asociación entre los datos adquiridos por el sistema de cámaras y el escáner de ultrasonidos, así mismo proporcionará la señal de reloj que permita, bien sincronizar la toma de muestras o bien realizar la interpolación de los datos si la toma de muestras no se realiza de forma síncrona con la adquisición de posiciones y orientaciones de la sonda del escáner de ultrasonidos. El subsistema de control (7) es también el encargado de determinar cómo y dónde se almacenan los datos así como de comandar el inicio y fin de la captura de datos. Los subsistemas de coordinación y almacenamiento podrán realizarse utilizando un PC, aunque puede implementarse también utilizando un micro-controlador, una FPGA u otros sistemas electrónicos que lo permitan. El subsistema de almacenamiento comprenderá una base de datos en la que se relacionarán los datos obtenidos con el escáner 5 de ultrasonidos con las posiciones y orientaciones de la sonda medidas, o calculadas, en el momento de la medida con el escáner de ultrasonidos. Dicha base de datos puede almacenarse en cualquier dispositivo de almacenamiento electrónico, en este caso, el disco duro del mismo PC que contiene el subsistema de los algoritmos de control y coordinación.
+ ES-2411811_B1 Sistema de inspección no destructiva por ultrasonidos para registro flexible con encoder inalámbrico. OBJETO DE LA INVENCIÓN La presente invención se refiere a un sistema para realizar inspecciones mediante la técnica de ultrasonidos utilizando un sistema inalámbrico para la adquisición de los datos ligados a la posición de la sonda (con la que se realiza la inspección) así como a su orientación espacial, permitiendo realizar un registro de la posición y señal ultrasónica de gran presión y exactitud. La presente invención se encuadra dentro del sector de la técnica de los ensayos no destructivos siendo su ámbito de aplicación los sectores aeronáutico, espacial, ferroviario, de la automoción, naval y de la construcción, principalmente. ESTADO DE LA TÉCNICA Los sistemas de inspección actuales con registro en posición de la señal ultrasónica están basados en posicionadores o “encoders” mecánicos de poca flexibilidad. En general estos están limitados a la inspección de piezas planas (con encoder lineales) , de curvatura limitada (encoder curvos) o sistemas a medida para la inspección de elementos de geometría variada, estos últimos se fabrican de forma expresa y personalizada para una aplicación particular. No se ha encontrado en el estudio del estado de la técnica realizado ningún sistema similar al propuesto que permita el posicionamiento de la sonda de ultrasonidos mediante un sistema inalámbrico basado en ninguna tecnología. Existen múltiples sistemas que realizan inspección de “no contacto” mediante visión (v.gr. FR2923606 (A1) – Nondestructively controlling welding point, by examining welding point surface using a camera, quantifying distribution of chromatic density/halo formed around crucible juntion, and comparing value determined at interval of reference value [“Control no destructivo de puntos de soldadura mediante examen de la superficie de soldadura utilizando una cámara, cuantificando la distribución de densidad cromática y halos formados alrededor de los puntos de unión y comparando los valores los valores determinados en intervalos frente a valores de referencia]) y diferentes técnicas de ultrasonidos (v.gr. RU2008130970 (A) - Non-destructive inspection method [“Método de inspección no destructivo”]) , como pueden ser los dispositivos “phased array” o los ultrasonidos láser, capaces de generar la vibración que provoca las ondas sonoras por impulsos láser, pero el objeto de la presente invención no es una mejora ni modificación en el sistema de ultrasonidos propiamente, y sería de aplicación a cualquiera de los mencionados anteriormente. Así mismo se han encontrado en la bibliografía diferentes propuestas para la realización de inspecciones utilizando metodología basada en luz, bien visible bien en otros rangos de frecuencias (v.gr. WO2007149050 – Method and apparatus for 3-Dimensional visión and inspection of ball and like protusions of electronic components [“Método y aparato para visión tridimensional e inspección de bolas y protusiones de componentes electrónicos”]) así como sistemas basados en visión o en láser (laser-scan) para la reconstrucción de modelos tridimensionales de piezas, pero tampoco es el objeto de la presente invención (v.gr. US 2009279772 – Method and system for identifying defects in NDT image data [“Método y sistema para identificar defectos en imágenes de datos de sistemas NDT”]) . EXPLICACIÓN DE LA INVENCIÓN La presente invención consiste esencialmente en un sistema para inspección de componentes por ultrasonidos que permite el registro en posición y actitud de los datos ultrasónicos obtenidos durante la inspección sin la necesidad de utilizar encoders u otros sistemas mecánicos o aparatosos y que en general no posibilitan la inspección flexible de distintas piezas de geometrías compleja con el mismo sistema. El sistema objeto de la invención consta principalmente de tres subsistemas y los interfaces necesarios para su integración y funcionamiento. Los tres subsistemas son: escáner de ultrasonidos para ensayos no destructivos, subsistema de posicionamiento a distancia, finalmente, el tercer subsistema, junto a los interfaces necesarios, es el que denominaremos subsistema de control. El principio de funcionamiento de la invención se basa en la posibilidad de obtener la posición y la orientación de la sonda de inspección de un escáner de ultrasonidos de forma precisa y sin necesidad de utilizar dispositivos mecánicos adicionales a la sonda emisora-receptora para determinar su posición y actitud. El subsistema de control permite la determinación de la posición y orientación de la sonda de inspección (ubicación del plano normal de inspección) de forma coordinada con la toma de medidas del escáner, consiguiendo así aparear medidas con posiciones y orientaciones obteniéndose los datos completos de la inspección (C-Scan) , este apareamiento no tiene por qué ser totalmente síncrono, en el sentido de que si la medida de la sonda de ultrasonidos se realiza entre dos adquisiciones de datos del sistema de posicionamiento, se pueden interpolar los datos para determinar la posición en el momento de la medida; si la frecuencia de muestreo es suficientemente alta, el error introducido al interpolar podrá considerarse no representativo. Estos datos, de posición y orientación de la sonda de medida por ultrasonidos junto con los datos obtenidos mediante el sistema de ultrasonidos, se almacenan en una base de datos que permite su acceso posterior para su estudio. Adicionalmente, se obtiene también un mapa preciso de las zonas inspeccionadas así como la orientación de la sonda durante la inspección, lo que permite parametrizar la superficie de la pieza objeto de la inspección localizando de forma precisa los posibles defectos hallados y teniendo una imagen en tres dimensiones de la pieza objeto de la inspección. El subsistema de control se encargará, además, de almacenar los datos de posición y orientación, debidamente apareados con los resultados de la inspección por ultrasonidos en una base de datos que permita retomar la inspección si se deja inacabada, recuperar los datos para análisis posteriores y, en general, tener acceso a los datos para poder transmitirlos o usarlos con posterioridad. El subsistema de control podemos dividirlo, a su vez, en tres subsistemas: el subsistema de adquisición de datos, el subsistema de coordinación, y el subsistema de almacenamiento. El subsistema de adquisición de datos será el encargado de recoger los datos enviados desde el sistema de cámaras así como desde el escáner de ultrasonidos. Este subsistema incluirá, además de la o las tarjetas de adquisición de datos necesarias, las interfaces para adaptar los datos desde las salidas de los otros dos sistemas para que puedan ser debidamente recogidos a través de las tarjetas de adquisición. El subsistema de coordinación es aquel que realiza la asociación entre los datos adquiridos por el sistema de cámaras y el escáner de ultrasonidos, así mismo proporcionará la señal de reloj que permita, bien sincronizar la toma de muestras o bien realizar la interpolación de los datos si la toma de muestras no se realiza de forma síncrona con la adquisición de posiciones y orientaciones de la sonda del escáner de ultrasonidos. El subsistema de control es también el encargado de determinar cómo y dónde se almacenan los datos así como de comandar el inicio y fin de la captura de datos. El subsistema de almacenamiento comprenderá una base de datos en la que se relacionarán los datos obtenidos con el escáner de ultrasonidos con las posiciones y orientaciones de la sonda medidas, o calculadas, en el momento de la medida con el escáner de ultrasonidos. DESCRIPCIÓN DE LAS FIGURAS Para complementar la descripción que se está realizando y con objeto de ayudar a una mejor comprensión de las características del invento, de acuerdo con un ejemplo preferente de realización práctica del mismo, se acompaña como parte integrante de dicha descripción, un juego de figuras en donde, con carácter ilustrativo y no limitativo, se ha representado lo siguiente: ¡Error! No se encuentra el origen de la referencia.Figura 1. Se representa un diagrama del sistema completo donde se pueden identificar el subsistema de control, el equipo de ensayos no destructivos por ultrasonidos (NDT) , el subsistema de posicionamiento a distancia, el objeto de la inspección (DUT) . ¡Error! No se encuentra el origen de la referencia.Figura 2. Se representa esquemáticamente el sistema de localización a distancia incluyendo cinco cámaras y cuatro marcadores sobre la sonda de inspección por ultrasonidos, aunque estrictamente serían necesarios tan sólo tres cámaras y tres marcadores para poder obtener los datos de posición y orientación de la pieza bajo seguimiento. En las figuras, los elementos numerados se detallan a continuación: – Pieza objeto de la inspección, DUT por sus siglas en inglés. 2 – Sonda de inspección por ultrasonido. 3 – Marcadores del sistema de localización a distancia. 4 – Escáner de ultrasonidos para ensayos no destructivos. 5 – Cámaras. 6 – Subsistema de control del sistema de localización a distancia. 7 – Subsistema de control. EJEMPLO DE REALIZACIÓN PREFERENTE Se describe a continuación un ejemplo de realización de la invención sin que dicha propuesta de realización suponga la opción óptima ni limite en manera alguna las posibilidades de realización de la misma. La invención, como se ha descrito anteriormente, consta de tres subsistemas principales: escáner de ultrasonidos para ensayos no destructivos (4) , subsistema de posicionamiento a distancia o de localización por visión compuesto por un conjunto de cámaras (5) , en el caso de este ejemplo de realización preferente, infrarrojas dotadas de un subsistema de control del sistema de localización a distancia (6) , y subsistema de comunicaciones, control, recogida y almacenamiento de datos (7) , más los interfaces necesarios para conectar entre sí los subsistemas (¡Error! No se encuentra el origen de la referencia.) . En la figura 2 se observa cómo el subsistema de posicionamiento a distancia o de localización por visión estará compuesto por un conjunto de cámaras (5) infrarrojas dotadas de un subsistema de control del sistema de localización a distancia (6) que permite identificar ciertos marcadores del sistema de localización a distancia (3) , los cuales deberán colocarse sobre la pieza a controlar, en este caso la sonda de inspección por ultrasonidos (2) en posición y orientación. El subsistema de posicionamiento a distancia o de localización por visión necesita de al menos tres cámaras (5) infrarrojas que tengan en línea de visión los marcadores del sistema de localización a distancia (3) en todo momento y al menos tres de estos marcadores del sistema de localización a distancia (3) para poder proporcionar información de la posición y orientación de la pieza. Para evitar pérdida de datos debido a posibles pérdidas de la línea de visión en algunos momentos se utilizará un sistema de al menos seis cámaras (5) infrarrojas y cinco marcadores del sistema de localización a distancia (3) en la sonda, garantizando la integridad de la señal en todo momento. Estas cantidades podrán variar en función de las dimensiones y geometrías de las salas y piezas a inspeccionar, pudiendo ser tan grandes como se requiera para garantizar la integridad de las señales en todo momento. El subsistema de escáner de ultrasonidos para ensayos no destructivos (4) consiste en un sistema con una sonda emisorareceptora de pulsos sonoros, o sonda de inspección por ultrasonidos (2) , a frecuencias ultrasónicas en el que analizando los tiempos de retardo de los ecos se obtiene información sobre las inter-fases internas del material y se pueden detectar anomalías respecto al patrón esperado. Para este tipo de dispositivos existen diversos modelos de sonda para la inspección, en esta realización, consideraremos una sonda phased array plana o mono-elemento por ser la más extendidas y estandarizadas, aunque no supone que sea limitativo de ninguna manera, toda la invención es igualmente válida para otros tipos de sondas “phased array” de geometrías especiales. El único requisito exigible al sistema de ultrasonidos es que sea capaz de proporcionar una salida de los datos en tiempo real, de manera que puedan ser almacenados y tratados en otro dispositivo, en este caso en un PC que formará parte del sistema de control de la invención. El subsistema de control (7) será el encargado de recoger los datos suministrados por los otros dos sistemas y aparearlos de manera apropiada de manera que se disponga de la información precisa de la posición y la orientación de la sonda de ultrasonidos para cada medida realizada. Además, el subsistema de control (7) se encarga también de gestionar el almacenamiento de los datos recibidos en una base de datos. Como ya se ha señalado, el subsistema de control (7) se divide, a su vez, en tres subsistemas: el subsistema de adquisición de datos, el subsistema de coordinación, y el subsistema de almacenamiento. El subsistema de adquisición de datos será el encargado de recoger los datos enviados desde el sistema de cámaras así como desde el escáner de ultrasonidos. Este subsistema incluirá, además de la o las tarjetas de adquisición de datos necesarias, las interfaces para adaptar los datos desde las salidas de los otros dos sistemas para que puedan ser debidamente recogidos a través de las tarjetas de adquisición. El subsistema de coordinación es aquel que realiza la asociación entre los datos adquiridos por el sistema de cámaras y el escáner de ultrasonidos, así mismo proporcionará la señal de reloj que permita, bien sincronizar la toma de muestras o bien realizar la interpolación de los datos si la toma de muestras no se realiza de forma síncrona con la adquisición de posiciones y orientaciones de la sonda del escáner de ultrasonidos. El subsistema de control (7) es también el encargado de determinar cómo y dónde se almacenan los datos así como de comandar el inicio y fin de la captura de datos. Los subsistemas de coordinación y almacenamiento podrán realizarse utilizando un PC, aunque puede implementarse también utilizando un micro-controlador, una FPGA u otros sistemas electrónicos que lo permitan. El subsistema de almacenamiento comprenderá una base de datos en la que se relacionarán los datos obtenidos con el escáner 5 de ultrasonidos con las posiciones y orientaciones de la sonda medidas, o calculadas, en el momento de la medida con el escáner de ultrasonidos. Dicha base de datos puede almacenarse en cualquier dispositivo de almacenamiento electrónico, en este caso, el disco duro del mismo PC que contiene el subsistema de los algoritmos de control y coordinación.
Publicaciones:
ES2411811 (08/07/2013) - A2 Solicitud de patente sin informe sobre el estado de la técnica
ES2411811 (13/12/2013) - R1 Informe sobre el estado de la técnica
ES2411811 (09/07/2014) - B1 Patente de invención
Eventos:
En fecha 30/12/2011 se realizó Registro Instancia de Solicitud
En fecha 10/01/2012 se realizó Admisión a Trámite
En fecha 10/01/2012 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 28/01/2013 se realizó Continuación del Procedimiento
En fecha 07/02/2013 se realizó Publicación Continuación del Procedimiento
En fecha 19/02/2013 se realizó IET1_Petición Realización IET
En fecha 08/07/2013 se realizó Publicación Solicitud
En fecha 08/07/2013 se realizó Publicación Folleto Solicitud (A2)
En fecha 28/11/2013 se realizó Realizado IET
En fecha 29/11/2013 se realizó 1109P_Comunicación Traslado del IET
En fecha 13/12/2013 se realizó Publicación IET
En fecha 13/12/2013 se realizó Publicación Folleto IET (R1)
En fecha 14/01/2014 se realizó Reanudación Procedimiento General de Concesión
En fecha 20/01/2014 se realizó Publicación Reanudación Procedimiento General de Concesión
En fecha 10/04/2014 se realizó Publicación Traslado Observaciones del IET
En fecha 02/07/2014 se realizó Sin Modificación de Reivindicaciones
En fecha 02/07/2014 se realizó Concesión
En fecha 02/07/2014 se realizó 1203P_Notificación Concesión por Procedimiento General de Concesión
En fecha 09/07/2014 se realizó Publicación concesión Patente PGC
En fecha 09/07/2014 se realizó Publicación Folleto Concesión
En fecha 06/11/2014 se realizó Entrega título
En fecha 10/12/2014 se realizó 3406X_Solicitud Correcciones
Pagos:
19/02/2013 - Pago Tasas IET
03/10/2014 - Pago Tasas Concesión
03/10/2014 - Pago 03 Anualidad
13/11/2014 - Pago 04 Anualidad
07/10/2015 - Pago 05 Anualidad
30/09/2016 - Pago 06 Anualidad
01/02/2018 - Pago 07 Anualidad
11/01/2019 - Pago 08 Anualidad
20/01/2020 - Pago 09 Anualidad
13/01/2021 - Bono en Pago 10 Anualidad (B2)
13/01/2021 - Pago 10 Anualidad
17/01/2022 - Bono en Pago 11 Anualidad (B2)
17/01/2022 - Pago 11 Anualidad
01/02/2023 - Pago 12 Anualidad
08/01/2024 - Pago 13 Anualidad
Fuente de la información
Parte de la información aquí publicada es pública puesto que ha sido obtenida de la Oficina de Propiedad Industrial de los diferentes países el 09/05/2024 y por lo tanto puede ser que la información no esté actualizada.Parte de la información aquí mostrada ha sido calculada por nuestro sistema informático y puede no ser veraz.
Privacidad
Si considera que al información aquí publicada afecta a su privacidad y desea que eliminemos la información aquí publicada envíe un email a info@patentes-y-marcas.com o rellene el formulario que encontrará aquí.Información sobre el registro de patente nacional por SISTEMA DE INSPECCION NO DESTRUCTIVA POR ULTRASONIDOS PARA REGISTRO FLEXIBLE CON ENCODER INALAMBRICO con el número P201132145
El registro de patente nacional por SISTEMA DE INSPECCION NO DESTRUCTIVA POR ULTRASONIDOS PARA REGISTRO FLEXIBLE CON ENCODER INALAMBRICO con el número P201132145 fue solicitada el 30/12/2011. Se trata de un registro en España por lo que este registro no ofrece protección en el resto de países. El registro SISTEMA DE INSPECCION NO DESTRUCTIVA POR ULTRASONIDOS PARA REGISTRO FLEXIBLE CON ENCODER INALAMBRICO con el número P201132145 fue solicitada por FUNDACION ANDALUZA PARA EL DESARROLLO AEROESPACIAL mediante los servicios del agente JOSE MARIA BARTRINA DIAZ. El registro [modality] por SISTEMA DE INSPECCION NO DESTRUCTIVA POR ULTRASONIDOS PARA REGISTRO FLEXIBLE CON ENCODER INALAMBRICO con el número P201132145 está clasificado como G01B 17/00,G01S 15/00 según la clasificación internacional de patentes.
Otras invenciones solicitadas por FUNDACION ANDALUZA PARA EL DESARROLLO AEROESPACIAL
Es posible conocer todas las invenciones solicitadas por FUNDACION ANDALUZA PARA EL DESARROLLO AEROESPACIAL entre las que se encuentra el registro de patente nacional por SISTEMA DE INSPECCION NO DESTRUCTIVA POR ULTRASONIDOS PARA REGISTRO FLEXIBLE CON ENCODER INALAMBRICO con el número P201132145. Si se desean conocer más invenciones solicitadas por FUNDACION ANDALUZA PARA EL DESARROLLO AEROESPACIAL clicar aquí.Otras invenciones solicitadas en la clasificación internacional de patentes G01B 17/00,G01S 15/00.
Es posible conocer invenciones similares al campo de la técnica se refiere. El registro de patente nacional por SISTEMA DE INSPECCION NO DESTRUCTIVA POR ULTRASONIDOS PARA REGISTRO FLEXIBLE CON ENCODER INALAMBRICO con el número P201132145 está clasificado con la clasificación G01B 17/00,G01S 15/00 por lo que si se desea conocer más registros con la clasificación G01B 17/00,G01S 15/00 clicar aquí.Otras invenciones solicitadas a través del representante JOSE MARIA BARTRINA DIAZ
Es posible conocer todas las invenciones solicitadas a través del agente JOSE MARIA BARTRINA DIAZ entre las que se encuentra el registro patente nacional por SISTEMA DE INSPECCION NO DESTRUCTIVA POR ULTRASONIDOS PARA REGISTRO FLEXIBLE CON ENCODER INALAMBRICO con el número P201132145. Si se desean conocer más invenciones solicitadas a través del agente JOSE MARIA BARTRINA DIAZ clicar aquí.Patentes en España
Es posible conocer todas las invenciones publicadas en España entre las que se encuentra el registro patente nacional por SISTEMA DE INSPECCION NO DESTRUCTIVA POR ULTRASONIDOS PARA REGISTRO FLEXIBLE CON ENCODER INALAMBRICO. Nuestro portal www.patentes-y-marcas.com ofrece acceso a las publicaciones de patentes en España. Conocer las patentes registradas en un país es importante para saber las posibilidades de fabricar, vender o explotar una invención en España.Patentes registradas en la clase G
Es posible conocer todas las patentes registradas en la clase G (FISICA) entre las que se encuentra la patente SISTEMA DE INSPECCION NO DESTRUCTIVA POR ULTRASONIDOS PARA REGISTRO FLEXIBLE CON ENCODER INALAMBRICO con el número P201132145. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase G01
Es posible conocer todas las patentes registradas en la clase G01 (METROLOGIA; ENSAYOS) entre las que se encuentra la patente SISTEMA DE INSPECCION NO DESTRUCTIVA POR ULTRASONIDOS PARA REGISTRO FLEXIBLE CON ENCODER INALAMBRICO con el número P201132145. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase G01B
Es posible conocer todas las patentes registradas en la clase G01B (MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; ) entre las que se encuentra la patente SISTEMA DE INSPECCION NO DESTRUCTIVA POR ULTRASONIDOS PARA REGISTRO FLEXIBLE CON ENCODER INALAMBRICO con el número P201132145. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase G01S
Es posible conocer todas las patentes registradas en la clase G01S (LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOC) entre las que se encuentra la patente SISTEMA DE INSPECCION NO DESTRUCTIVA POR ULTRASONIDOS PARA REGISTRO FLEXIBLE CON ENCODER INALAMBRICO con el número P201132145. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.
¿Tienes alguna duda?
Escribe tu consulta y te responderemos rápida y gratuitamente.

Otras patentes similares
 P201131756
P201131756
 P201200038
P201200038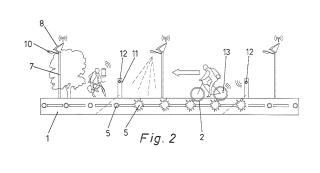
Profesionales Recomendados
Barcelona
933182440
España
933182440
España

Barcelona
+34 93 362 16 97
España
+34 93 362 16 97
España

Barcelona
932 593 600
España
932 593 600
España







