


- Home /
- Publicaciones de patentes /
- ROBOT TRAZADOR DE LÍNEAS DE MARCAJE PARA CONSTRUCCIÓN
Patente nacional por "ROBOT TRAZADOR DE LÍNEAS DE MARCAJE PARA CONSTRUCCIÓN"
Este registro ha sido solicitado por
PHENOMENON ROBOTICS, S.L.
a través del representanteMIKEL VEIGA SERRANO
Contacto
- Estado: Vigente
- País:
- España
- Fecha solicitud:
- 19/08/2022
- Número solicitud:
-
P202230758
- Número publicación:
-
ES2962583
- Fecha de concesión:
-
- Inventores:
-
Persona física
- Datos del titular:
-
PHENOMENON ROBOTICS, S.L.
- Datos del representante:
-
Mikel Veiga Serrano
- Clasificación Internacional de Patentes:
- E04G 21/18,G01C 15/04
- Clasificación Internacional de Patentes de la publicación:
- E04G 21/18,G01C 15/04
- Fecha de vencimiento:
Quiero registrar una patente

Reivindicaciones:
+ ES-2962583_A11.- Robot trazador de líneas de mareaje para construcción, que se desplaza por medio de unas ruedas de desplazamiento (16) y unas ruedas de giro (17) , para seguir la trayectoria de las líneas de marcaje a realizar comprendiendo un elemento marcador (3) depositador de tinta para el marcado de las líneas, y con un prisma de posicionamiento (11) que define la posición del robot, comprendiendo el robot trazador unos medios de control (12) para accionar el desplazamiento en función de una trayectoria preseleccionada y el posicionamiento calculado por el prisma de posicionamiento, caracterizado por que el elemento marcador (3) va incorporado sobre un conjunto de guiado (4) que permite el desplazamiento de dicho elemento marcador (3) en dirección perpendicular a la trayectoria de movimiento del robot trazador, estando relacionado el mencionado elemento marcador (3) con un conjunto operativo (2) que actúa el desplazamiento sobre el conjunto de guiado (4) para corrección de las desviaciones de la trayectoria preseleccionada. 2.- Robot trazador de líneas de marcaje para construcción, de acuerdo con la primera reivindicación, caracterizado por que el conjunto operativo (2) está formado por un actuador (5) que va unido al elemento marcador (3) por medio de una pletina (6) . 3.- Robot trazador de líneas de marcaje para construcción, de acuerdo con la reivindicación 1 o 2, caracterizado por que el conjunto de guiado (4) está formado por una guía (7) , sobre la cual va incorporado en montaje de desplazamiento el elemento marcador (3) . 4.- Robot trazador de líneas de marcaje para construcción, de acuerdo con una cualquiera de las reivindicaciones anteriores, caracterizado por que el actuador (5) del conjunto operativo (2) es un tornillo sinfín. 5.- Robot trazador de líneas de marcaje para construcción, de acuerdo con una cualquiera de las reivindicaciones anteriores, caracterizado por que los medios de control (11) están configurados para enviar una señal al conjunto operativo (2) para el desplazamiento del elemento marcador (3) sobre el conjunto de guiado (4) . 6.- Robot trazador de líneas de marcaje para construcción, de acuerdo con la primera reivindicación, caracterizado porque los medios de control (12) están configurados para regular el caudal de expulsión de tinta en función de la cantidad y/o grosor de la línea a trazar.
Los productos y servicios protegidos por este registro son:
E04G 21/18 - G01C 15/04
Descripciones:
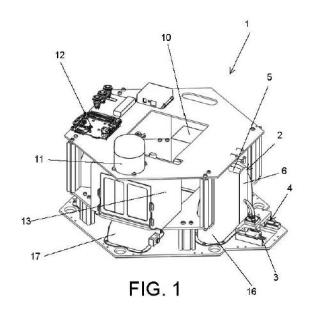
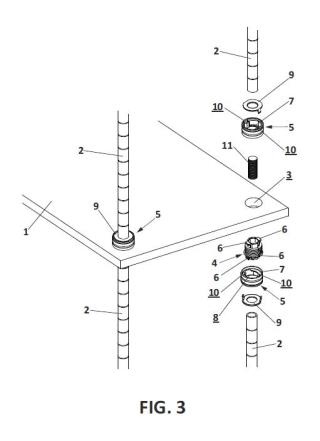
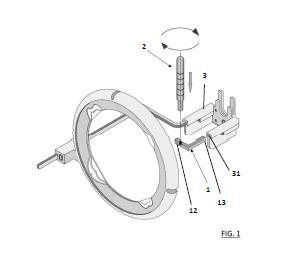
+ ES-2962583_A1 ROBOT TRAZADOR DE LÍNEAS DE MARCAJE PARA CONSTRUCCIÓN Sector de la técnica La presente invención está relacionada con el sector de la construcción, refiriéndose concretamente a un robot trazador de líneas de marcaje para señalar las posiciones en las que se tienen que colocar los elementos estructurales en las construcciones, con una realización que es capaz de compensar las desviaciones que se producen entre la trayectoria teórica preseleccionada que debe seguir el robot trazador según las especificaciones establecidas en los planos de obra, y la trayectoria real que se sigue durante el desplazamiento de realización de las líneas de marcaje en las construcciones de aplicación. Estado de la técnica En las obras y reformas de construcciones es habitual el uso de elementos tiralíneas, con los cuales se hacen líneas de marcaje en el suelo para identificar los lugares donde deben instalarse los elementos de construcción, como tabiques, puertas, columnas, etc. según el plano de la obra. Este es un trabajo, que puede llevar mucho tiempo en el caso de grandes superficies, mientras que, por otro lado, exige una gran precisión y las consecuencias de no hacerlo correctamente pueden ser graves, por lo que es necesario que se haga con meticulosa exactitud. Hasta no hace mucho tiempo, dicho trabajo resultaba lento y tedioso, ya que era realizado manualmente por operarios, lo cual daba además lugar a errores que repercutían en problemas futuros de la construcción. En la actualidad, se han desarrollado unos robots que, mediante un sistema de orientación tipo GPS o similar, conducen el movimiento del robot mediante unas ruedas motorizadas, para realizar por medio de un marcador proyector de tinta las líneas de marcaje, permitiendo trazar dichas líneas de manera más rápida y precisa. Sin embargo, el GPS no es la solución más precisa de posicionamiento además de sus limitaciones en espacios cerrados. Es por llo, que en la actualidad es frecuente el uso de un prisma de posicionamiento que recibe la información de posición del equipo, y con esa información las ruedas del robot se orientan y avanzan realizando el tintado el suelo. El problema de esto robots trazadores es que no consiguen mantener la posición exacta del desplazamiento a lo largo de una trayectoria a seguir, produciéndose desviaciones en la trayectoria como por ejemplo del orden de un centímetro en el recorrido de un metro. Error que no se puede permitir en un sector que exige una alta precisión. Para solventar ese error, el prisma debe estar corrigiendo la posición y se modifica la dirección de las ruedas, lo que implica la ralentización del trabajo y, en consecuencia, unos costes económicos extra. Es por tales inconvenientes que se hace necesario el desarrollo de un sistema que optimice el trabajo que realizan los mencionados robots de trazado de líneas de marcaje en las obras de construcción corrigiendo errores en la trayectoria. Objeto de la invención Para corregir los problemas mencionados anteriormente, la presente invención propone un robot trazador de líneas de marcaje para la construcción, el cual se ha desarrollado con unas características que permiten la capacidad de movimiento controlado por una CPU, para compensar la desviación que se genera entre la trayectoria teórica y la real durante el desplazamiento del robot en el proceso de trazado de las líneas de marcaje. El robot trazador de líneas de marcaje para construcción, que se desplaza por medio de unas ruedas de desplazamiento y unas ruedas de giro, para seguir la trayectoria de las líneas de marcaje a realizar, comprendiendo un elemento marcador depositador de tinta para el marcado de las líneas, y con un prisma de posicionamiento que define la posición del robot, comprendiendo el robot trazador unos medios de control para accionar el desplazamiento en función de una trayectoria preseleccionada y el posicionamiento calculado por el prisma de posicionamiento; en el cual el elemento marcador va incorporado sobre un conjunto de guiado que permite el desplazamiento de dicho elemento marcador en dirección perpendicular a la trayectoria de movimiento del robot trazador, estando relacionado el mencionado elemento marcador con un conjunto operativo que actúa el desplazamiento sobre el conjunto de guiado para corrección de las desviaciones de la rayectoria preseleccionada. De tal modo que el prisma de posicionamiento, u otro elemento de definición de la posición en tiempo real, envía la posición real del robot trazador a una CPU, la cual calcula la desviación existente respecto de la trayectoria que debe seguir el movimiento, y mediante los medios de control se envía una señal, activando en consecuencia el conjunto actuador, el cual desplaza al elemento marcador de líneas en una dirección perpendicular a la dirección de la trayectoria a seguir, para corregir la desviación del movimiento del robot trazador mientras el robot está en movimiento. De este modo el robot trazador no es necesario que corrija su posición sirviéndose de las ruedas de giro, sino que ajusta la trayectoria corrigiendo la línea con el elemento trazador desplazable, teniendo una carrera de desplazamiento suficiente para la corrección de las desviaciones producidas en líneas o trayectorias rectilíneas prolongadas. El desplazamiento transversal del elemento marcador de líneas para corregir las desviaciones del movimiento del robot trazador tendrá por lo tanto un recorrido limitado, de forma que si dicho desplazamiento del elemento marcador de líneas llegase a un extremo del recorrido y no se hubiera realizado el ajuste completo, los medios de control envían señal de ajuste a las ruedas de giro para continuar corrigiéndose automáticamente las desviaciones respecto de la trayectoria a seguir, lo cual reduce a un mínimo las veces que el robot trazador tiene que reorientarse con sus ruedas de giro, en comparación con los sistemas convencionales de reorientación continua mediante las ruedas de desplazamiento. Gracias a esta configuración, el ajuste es en movimiento y en continuo, por lo que se agiliza el trazado al no tener que ajustar cada cierto tramo con las ruedas de giro, además que la precisión es mayor ya que se realiza un ajuste más progresivo. Preferentemente el conjunto operativo del robot trazador está formado por un actuador unido al elemento marcador por medio de una pletina, de forma que al actuar el elemento marcador es desplazado por la pletina hasta la posición necesaria, preferentemente a través de una guía sobre la cual va incorporado en montaje de desplazamiento el elemento marcador. De esta forma queda definido por la guía un desplazamiento perpendicular a la trayectoria actuando según la señal daba por los medios de control. Preferentemente, el actuador será de la forma de un tornillo sinfín, de modo que el desplazamiento del elemento marcador será más suave y preciso, al desplazar la pletina de forma progresiva. De acuerdo con la invención, los medios de control están configurados para enviar una señal al conjunto operativo para el desplazamiento del marcador sobre el conjunto de guiado en función de la posición detectada por el prisma de orientación. Según otro aspecto de la invención, los medios de control están adicionalmente configurados para regular el caudal de expulsión de tinta en función de la cantidad y/o grosor de la línea a trazar. De esta forma, se ajusta la trayectoria de mejor manera con líneas más suaves y precisas que definen una líneas de marcado con menos o ninguna desviación. Preferentemente, dicha regulación de caudal se lleva a cabo con una membra de regulación dispuesta en el elemento marcador. Descripción de las figuras Para ayudar a la comprensión de la invención, se adjuntan unos dibujos de carácter explicativo, que no son limitativos. La figura 1 muestra en perspectiva un ejemplo de realización práctica de un robot trazador de líneas de marcaje realizado según la invención que se preconiza sin la carcasa exterior para una mejor visualización de sus componentes. Las figuras 2 y 3 son una vista lateral del robot trazador de la figura anterior, estando el elemento marcador en los extremos de final de carrera del desplazamiento del elemento marcador respectivamente. La figura 4 es una vista en detalle de la disposición del elemento marcador y su disposición sobre un conjunto de guiado. Las figura 5 y 6 son vistas inferiores del robot trazador con el elemento marcador esplazado como en las figuras 2 y 3. Descripción detallada de la invención El objeto de la invención se refiere a un robot trazador (1) que permite realizar de manera precisa y rápida las líneas de marcaje para la ubicación de los elementos estructurales a instalar en las obras de construcción, como paredes, puertas, columnas, etc., con una realización cuyas características permiten compensar de un modo eficiente los errores de desviación de la trayectoria de movimiento del robot trazador (1) durante el trabajo de aplicación. Como se puede ver en la figura 1, dicho robot trazador (1) objeto de la invención comprende un conjunto operativo (2) , mediante el cual se desplaza, en movimiento perpendicular respecto de la trayectoria de desplazamiento de trabajo del robot trazador (1) , un elemento marcador (3) con el que se trazan mediante expulsión de tinta las líneas a marcar, yendo incorporado dicho elemento marcador (3) para ese desplazamiento perpendicular, en montaje desplazable sobre un conjunto de guiado (4) . El conjunto operativo (2) comprende un actuador (5) , el cual se une por medio de una pletina (6) con el elemento marcador (3) , el cual va montado sobre el conjunto de guiado (4) que está formado por una guía (7) , sobre la cual el elemento marcador (3) se incorpora por medio de una pieza (8) de acoplamiento unida a la pletina (6) como se puede ver en la figura 4. En la disposición de montaje el elemento marcador (3) pasa por una ventana (9) de la estructura del robot trazador (1) , como se observa en la figura 4, lo cual permite el desplazamiento de dicho elemento marcador (3) en su desplazamiento sobre la guía (7) cuando es movido por el actuador (5) en el funcionamiento de trabajo. En la realización práctica el conjunto funcional de robot trazador (1) incorpora además una CPU (10) , para introducir en ella los datos predeterminados de los planos de construcción de las obras a realizar, de modo que en base a dichos datos de los planos de obra la mencionada CPU (10) calcula las trayectorias de los movimientos que debe ejecutar el robot trazador (1) para realizar las líneas de marcaje de las posiciones de instalación de los elementos estructurales de la construcción, de tal manera que cuando se produce alguna desviación del movimiento del robot trazador (1) , respecto de la trayectoria a seguir, por edio de los medios de control (12) se hace funcionar al actuador (5) para mover el elemento marcador (3) sobre la guía (7) en un desplazamiento que compensa la desviación del movimiento del robot trazador (1) , consiguiéndose así una corrección automática que permite seguir con exactitud las trayectorias de marcaje según lo establecido en los planos de obra de las construcciones de aplicación. Para el trazado de las líneas a marcar la CPU (10) activa un compresor no representado, con lo que la tinta de un depósito de tinta (13) es enviada a través de una manguera (14) para llegar hasta el elemento marcador (3) , el cual deposita la tinta en el recorrido que sigue el robot trazador (1) , realizando las líneas de marcaje. El robot trazador (1) incluye también un cable (15) de datos, mediante el cual se controla la cantidad de tinta que debe expulsar el elemento marcador (3) en función de los requerimientos que corresponden con los datos del plano de la obra de aplicación y de la velocidad de desplazamiento del robot trazador (1) . En esas condiciones, el robot trazador (1) avanza mediante unas ruedas de desplazamiento (16) , de modo que durante el desplazamiento los medios de control (12) envían en cada instante la situación de la posición real del robot trazador (1) a la CPU (10) , la cual compara la trayectoria del movimiento con la trayectoria teórica que se debe seguirse según los datos del plano de obra y, en caso de alguna desviación con respecto a dicha trayectoria teórica, activa el conjunto operativo (2) , el cual mediante el actuador (5) mueve por medio de la pletina (6) al elemento marcador (3) sobre la guía (7) , hasta una posición que compensa la desviación del desplazamiento del robot trazador (1) . Cuando por los movimientos de corrección de la trayectoria de desplazamiento del robot trazador (1) el elemento marcador (3) llega a uno de los extremos de la guía (7) y es necesario realizar una corrección adicional de la trayectoria, el robot trazador (1) corrige su posición mediante unas ruedas de giro (17) , colocándose así en una posición que permite continuar compensando las desviaciones de la trayectoria del desplazamiento del robot trazador (1) , para realizar las líneas de marcaje en su posición exacta según los datos del plano de la obra de aplicación. Según una realización práctica, el actuador (5) del conjunto operativo (2) se prevé formado por un tornillo sinfín, pero esta realización no es limitativa, ya que dicho actuador (5) puede estar configurado por cualquier otro tipo de elemento actuador convencional, sin que ello ltere el objeto de la invención. Además, el cable de datos (15) se prevé relacionado con los medios de control (12) que regulan el caudal de tinta incorporando la manguera (14) una membrana de regulación del paso de tinta, permitiendo con todo ello conseguir la realización de líneas de marcaje más regulares y precisas, con independencia de la velocidad de trabajo del robot trazador (1) .
Publicaciones:
ES2962583 (19/03/2024) - A1 Solicitud de patente con informe sobre el estado de la técnica
Eventos:
En fecha 19/08/2022 se realizó Registro Instancia de Solicitud
En fecha 22/08/2022 se realizó Admisión a Trámite
En fecha 22/08/2022 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 13/09/2022 se realizó Superado examen de oficio
En fecha 20/04/2023 se realizó Realizado IET
En fecha 21/04/2023 se realizó 1109P_Comunicación Traslado del IET
En fecha 19/03/2024 se realizó Publicación Solicitud
En fecha 19/03/2024 se realizó Publicación Folleto Solicitud con IET (A1)
Pagos:
19/08/2022 - Pago Tasas IET
+ ES-2962583_A11.- Robot trazador de líneas de mareaje para construcción, que se desplaza por medio de unas ruedas de desplazamiento (16) y unas ruedas de giro (17) , para seguir la trayectoria de las líneas de marcaje a realizar comprendiendo un elemento marcador (3) depositador de tinta para el marcado de las líneas, y con un prisma de posicionamiento (11) que define la posición del robot, comprendiendo el robot trazador unos medios de control (12) para accionar el desplazamiento en función de una trayectoria preseleccionada y el posicionamiento calculado por el prisma de posicionamiento, caracterizado por que el elemento marcador (3) va incorporado sobre un conjunto de guiado (4) que permite el desplazamiento de dicho elemento marcador (3) en dirección perpendicular a la trayectoria de movimiento del robot trazador, estando relacionado el mencionado elemento marcador (3) con un conjunto operativo (2) que actúa el desplazamiento sobre el conjunto de guiado (4) para corrección de las desviaciones de la trayectoria preseleccionada. 2.- Robot trazador de líneas de marcaje para construcción, de acuerdo con la primera reivindicación, caracterizado por que el conjunto operativo (2) está formado por un actuador (5) que va unido al elemento marcador (3) por medio de una pletina (6) . 3.- Robot trazador de líneas de marcaje para construcción, de acuerdo con la reivindicación 1 o 2, caracterizado por que el conjunto de guiado (4) está formado por una guía (7) , sobre la cual va incorporado en montaje de desplazamiento el elemento marcador (3) . 4.- Robot trazador de líneas de marcaje para construcción, de acuerdo con una cualquiera de las reivindicaciones anteriores, caracterizado por que el actuador (5) del conjunto operativo (2) es un tornillo sinfín. 5.- Robot trazador de líneas de marcaje para construcción, de acuerdo con una cualquiera de las reivindicaciones anteriores, caracterizado por que los medios de control (11) están configurados para enviar una señal al conjunto operativo (2) para el desplazamiento del elemento marcador (3) sobre el conjunto de guiado (4) . 6.- Robot trazador de líneas de marcaje para construcción, de acuerdo con la primera reivindicación, caracterizado porque los medios de control (12) están configurados para regular el caudal de expulsión de tinta en función de la cantidad y/o grosor de la línea a trazar.
Los productos y servicios protegidos por este registro son:
E04G 21/18 - G01C 15/04
Descripciones:
+ ES-2962583_A1 ROBOT TRAZADOR DE LÍNEAS DE MARCAJE PARA CONSTRUCCIÓN Sector de la técnica La presente invención está relacionada con el sector de la construcción, refiriéndose concretamente a un robot trazador de líneas de marcaje para señalar las posiciones en las que se tienen que colocar los elementos estructurales en las construcciones, con una realización que es capaz de compensar las desviaciones que se producen entre la trayectoria teórica preseleccionada que debe seguir el robot trazador según las especificaciones establecidas en los planos de obra, y la trayectoria real que se sigue durante el desplazamiento de realización de las líneas de marcaje en las construcciones de aplicación. Estado de la técnica En las obras y reformas de construcciones es habitual el uso de elementos tiralíneas, con los cuales se hacen líneas de marcaje en el suelo para identificar los lugares donde deben instalarse los elementos de construcción, como tabiques, puertas, columnas, etc. según el plano de la obra. Este es un trabajo, que puede llevar mucho tiempo en el caso de grandes superficies, mientras que, por otro lado, exige una gran precisión y las consecuencias de no hacerlo correctamente pueden ser graves, por lo que es necesario que se haga con meticulosa exactitud. Hasta no hace mucho tiempo, dicho trabajo resultaba lento y tedioso, ya que era realizado manualmente por operarios, lo cual daba además lugar a errores que repercutían en problemas futuros de la construcción. En la actualidad, se han desarrollado unos robots que, mediante un sistema de orientación tipo GPS o similar, conducen el movimiento del robot mediante unas ruedas motorizadas, para realizar por medio de un marcador proyector de tinta las líneas de marcaje, permitiendo trazar dichas líneas de manera más rápida y precisa. Sin embargo, el GPS no es la solución más precisa de posicionamiento además de sus limitaciones en espacios cerrados. Es por llo, que en la actualidad es frecuente el uso de un prisma de posicionamiento que recibe la información de posición del equipo, y con esa información las ruedas del robot se orientan y avanzan realizando el tintado el suelo. El problema de esto robots trazadores es que no consiguen mantener la posición exacta del desplazamiento a lo largo de una trayectoria a seguir, produciéndose desviaciones en la trayectoria como por ejemplo del orden de un centímetro en el recorrido de un metro. Error que no se puede permitir en un sector que exige una alta precisión. Para solventar ese error, el prisma debe estar corrigiendo la posición y se modifica la dirección de las ruedas, lo que implica la ralentización del trabajo y, en consecuencia, unos costes económicos extra. Es por tales inconvenientes que se hace necesario el desarrollo de un sistema que optimice el trabajo que realizan los mencionados robots de trazado de líneas de marcaje en las obras de construcción corrigiendo errores en la trayectoria. Objeto de la invención Para corregir los problemas mencionados anteriormente, la presente invención propone un robot trazador de líneas de marcaje para la construcción, el cual se ha desarrollado con unas características que permiten la capacidad de movimiento controlado por una CPU, para compensar la desviación que se genera entre la trayectoria teórica y la real durante el desplazamiento del robot en el proceso de trazado de las líneas de marcaje. El robot trazador de líneas de marcaje para construcción, que se desplaza por medio de unas ruedas de desplazamiento y unas ruedas de giro, para seguir la trayectoria de las líneas de marcaje a realizar, comprendiendo un elemento marcador depositador de tinta para el marcado de las líneas, y con un prisma de posicionamiento que define la posición del robot, comprendiendo el robot trazador unos medios de control para accionar el desplazamiento en función de una trayectoria preseleccionada y el posicionamiento calculado por el prisma de posicionamiento; en el cual el elemento marcador va incorporado sobre un conjunto de guiado que permite el desplazamiento de dicho elemento marcador en dirección perpendicular a la trayectoria de movimiento del robot trazador, estando relacionado el mencionado elemento marcador con un conjunto operativo que actúa el desplazamiento sobre el conjunto de guiado para corrección de las desviaciones de la rayectoria preseleccionada. De tal modo que el prisma de posicionamiento, u otro elemento de definición de la posición en tiempo real, envía la posición real del robot trazador a una CPU, la cual calcula la desviación existente respecto de la trayectoria que debe seguir el movimiento, y mediante los medios de control se envía una señal, activando en consecuencia el conjunto actuador, el cual desplaza al elemento marcador de líneas en una dirección perpendicular a la dirección de la trayectoria a seguir, para corregir la desviación del movimiento del robot trazador mientras el robot está en movimiento. De este modo el robot trazador no es necesario que corrija su posición sirviéndose de las ruedas de giro, sino que ajusta la trayectoria corrigiendo la línea con el elemento trazador desplazable, teniendo una carrera de desplazamiento suficiente para la corrección de las desviaciones producidas en líneas o trayectorias rectilíneas prolongadas. El desplazamiento transversal del elemento marcador de líneas para corregir las desviaciones del movimiento del robot trazador tendrá por lo tanto un recorrido limitado, de forma que si dicho desplazamiento del elemento marcador de líneas llegase a un extremo del recorrido y no se hubiera realizado el ajuste completo, los medios de control envían señal de ajuste a las ruedas de giro para continuar corrigiéndose automáticamente las desviaciones respecto de la trayectoria a seguir, lo cual reduce a un mínimo las veces que el robot trazador tiene que reorientarse con sus ruedas de giro, en comparación con los sistemas convencionales de reorientación continua mediante las ruedas de desplazamiento. Gracias a esta configuración, el ajuste es en movimiento y en continuo, por lo que se agiliza el trazado al no tener que ajustar cada cierto tramo con las ruedas de giro, además que la precisión es mayor ya que se realiza un ajuste más progresivo. Preferentemente el conjunto operativo del robot trazador está formado por un actuador unido al elemento marcador por medio de una pletina, de forma que al actuar el elemento marcador es desplazado por la pletina hasta la posición necesaria, preferentemente a través de una guía sobre la cual va incorporado en montaje de desplazamiento el elemento marcador. De esta forma queda definido por la guía un desplazamiento perpendicular a la trayectoria actuando según la señal daba por los medios de control. Preferentemente, el actuador será de la forma de un tornillo sinfín, de modo que el desplazamiento del elemento marcador será más suave y preciso, al desplazar la pletina de forma progresiva. De acuerdo con la invención, los medios de control están configurados para enviar una señal al conjunto operativo para el desplazamiento del marcador sobre el conjunto de guiado en función de la posición detectada por el prisma de orientación. Según otro aspecto de la invención, los medios de control están adicionalmente configurados para regular el caudal de expulsión de tinta en función de la cantidad y/o grosor de la línea a trazar. De esta forma, se ajusta la trayectoria de mejor manera con líneas más suaves y precisas que definen una líneas de marcado con menos o ninguna desviación. Preferentemente, dicha regulación de caudal se lleva a cabo con una membra de regulación dispuesta en el elemento marcador. Descripción de las figuras Para ayudar a la comprensión de la invención, se adjuntan unos dibujos de carácter explicativo, que no son limitativos. La figura 1 muestra en perspectiva un ejemplo de realización práctica de un robot trazador de líneas de marcaje realizado según la invención que se preconiza sin la carcasa exterior para una mejor visualización de sus componentes. Las figuras 2 y 3 son una vista lateral del robot trazador de la figura anterior, estando el elemento marcador en los extremos de final de carrera del desplazamiento del elemento marcador respectivamente. La figura 4 es una vista en detalle de la disposición del elemento marcador y su disposición sobre un conjunto de guiado. Las figura 5 y 6 son vistas inferiores del robot trazador con el elemento marcador esplazado como en las figuras 2 y 3. Descripción detallada de la invención El objeto de la invención se refiere a un robot trazador (1) que permite realizar de manera precisa y rápida las líneas de marcaje para la ubicación de los elementos estructurales a instalar en las obras de construcción, como paredes, puertas, columnas, etc., con una realización cuyas características permiten compensar de un modo eficiente los errores de desviación de la trayectoria de movimiento del robot trazador (1) durante el trabajo de aplicación. Como se puede ver en la figura 1, dicho robot trazador (1) objeto de la invención comprende un conjunto operativo (2) , mediante el cual se desplaza, en movimiento perpendicular respecto de la trayectoria de desplazamiento de trabajo del robot trazador (1) , un elemento marcador (3) con el que se trazan mediante expulsión de tinta las líneas a marcar, yendo incorporado dicho elemento marcador (3) para ese desplazamiento perpendicular, en montaje desplazable sobre un conjunto de guiado (4) . El conjunto operativo (2) comprende un actuador (5) , el cual se une por medio de una pletina (6) con el elemento marcador (3) , el cual va montado sobre el conjunto de guiado (4) que está formado por una guía (7) , sobre la cual el elemento marcador (3) se incorpora por medio de una pieza (8) de acoplamiento unida a la pletina (6) como se puede ver en la figura 4. En la disposición de montaje el elemento marcador (3) pasa por una ventana (9) de la estructura del robot trazador (1) , como se observa en la figura 4, lo cual permite el desplazamiento de dicho elemento marcador (3) en su desplazamiento sobre la guía (7) cuando es movido por el actuador (5) en el funcionamiento de trabajo. En la realización práctica el conjunto funcional de robot trazador (1) incorpora además una CPU (10) , para introducir en ella los datos predeterminados de los planos de construcción de las obras a realizar, de modo que en base a dichos datos de los planos de obra la mencionada CPU (10) calcula las trayectorias de los movimientos que debe ejecutar el robot trazador (1) para realizar las líneas de marcaje de las posiciones de instalación de los elementos estructurales de la construcción, de tal manera que cuando se produce alguna desviación del movimiento del robot trazador (1) , respecto de la trayectoria a seguir, por edio de los medios de control (12) se hace funcionar al actuador (5) para mover el elemento marcador (3) sobre la guía (7) en un desplazamiento que compensa la desviación del movimiento del robot trazador (1) , consiguiéndose así una corrección automática que permite seguir con exactitud las trayectorias de marcaje según lo establecido en los planos de obra de las construcciones de aplicación. Para el trazado de las líneas a marcar la CPU (10) activa un compresor no representado, con lo que la tinta de un depósito de tinta (13) es enviada a través de una manguera (14) para llegar hasta el elemento marcador (3) , el cual deposita la tinta en el recorrido que sigue el robot trazador (1) , realizando las líneas de marcaje. El robot trazador (1) incluye también un cable (15) de datos, mediante el cual se controla la cantidad de tinta que debe expulsar el elemento marcador (3) en función de los requerimientos que corresponden con los datos del plano de la obra de aplicación y de la velocidad de desplazamiento del robot trazador (1) . En esas condiciones, el robot trazador (1) avanza mediante unas ruedas de desplazamiento (16) , de modo que durante el desplazamiento los medios de control (12) envían en cada instante la situación de la posición real del robot trazador (1) a la CPU (10) , la cual compara la trayectoria del movimiento con la trayectoria teórica que se debe seguirse según los datos del plano de obra y, en caso de alguna desviación con respecto a dicha trayectoria teórica, activa el conjunto operativo (2) , el cual mediante el actuador (5) mueve por medio de la pletina (6) al elemento marcador (3) sobre la guía (7) , hasta una posición que compensa la desviación del desplazamiento del robot trazador (1) . Cuando por los movimientos de corrección de la trayectoria de desplazamiento del robot trazador (1) el elemento marcador (3) llega a uno de los extremos de la guía (7) y es necesario realizar una corrección adicional de la trayectoria, el robot trazador (1) corrige su posición mediante unas ruedas de giro (17) , colocándose así en una posición que permite continuar compensando las desviaciones de la trayectoria del desplazamiento del robot trazador (1) , para realizar las líneas de marcaje en su posición exacta según los datos del plano de la obra de aplicación. Según una realización práctica, el actuador (5) del conjunto operativo (2) se prevé formado por un tornillo sinfín, pero esta realización no es limitativa, ya que dicho actuador (5) puede estar configurado por cualquier otro tipo de elemento actuador convencional, sin que ello ltere el objeto de la invención. Además, el cable de datos (15) se prevé relacionado con los medios de control (12) que regulan el caudal de tinta incorporando la manguera (14) una membrana de regulación del paso de tinta, permitiendo con todo ello conseguir la realización de líneas de marcaje más regulares y precisas, con independencia de la velocidad de trabajo del robot trazador (1) .
Publicaciones:
ES2962583 (19/03/2024) - A1 Solicitud de patente con informe sobre el estado de la técnica
Eventos:
En fecha 19/08/2022 se realizó Registro Instancia de Solicitud
En fecha 22/08/2022 se realizó Admisión a Trámite
En fecha 22/08/2022 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 13/09/2022 se realizó Superado examen de oficio
En fecha 20/04/2023 se realizó Realizado IET
En fecha 21/04/2023 se realizó 1109P_Comunicación Traslado del IET
En fecha 19/03/2024 se realizó Publicación Solicitud
En fecha 19/03/2024 se realizó Publicación Folleto Solicitud con IET (A1)
Pagos:
19/08/2022 - Pago Tasas IET
Fuente de la información
Parte de la información aquí publicada es pública puesto que ha sido obtenida de la Oficina de Propiedad Industrial de los diferentes países el 10/05/2024 y por lo tanto puede ser que la información no esté actualizada.Parte de la información aquí mostrada ha sido calculada por nuestro sistema informático y puede no ser veraz.
Privacidad
Si considera que al información aquí publicada afecta a su privacidad y desea que eliminemos la información aquí publicada envíe un email a info@patentes-y-marcas.com o rellene el formulario que encontrará aquí.Información sobre el registro de patente nacional por ROBOT TRAZADOR DE LÍNEAS DE MARCAJE PARA CONSTRUCCIÓN con el número P202230758
El registro de patente nacional por ROBOT TRAZADOR DE LÍNEAS DE MARCAJE PARA CONSTRUCCIÓN con el número P202230758 fue solicitada el 19/08/2022. Se trata de un registro en España por lo que este registro no ofrece protección en el resto de países. El registro ROBOT TRAZADOR DE LÍNEAS DE MARCAJE PARA CONSTRUCCIÓN con el número P202230758 fue solicitada por PHENOMENON ROBOTICS, S.L. mediante los servicios del agente Mikel Veiga Serrano. El registro [modality] por ROBOT TRAZADOR DE LÍNEAS DE MARCAJE PARA CONSTRUCCIÓN con el número P202230758 está clasificado como E04G 21/18,G01C 15/04 según la clasificación internacional de patentes.
Otras invenciones solicitadas por PHENOMENON ROBOTICS, S.L.
Es posible conocer todas las invenciones solicitadas por PHENOMENON ROBOTICS, S.L. entre las que se encuentra el registro de patente nacional por ROBOT TRAZADOR DE LÍNEAS DE MARCAJE PARA CONSTRUCCIÓN con el número P202230758. Si se desean conocer más invenciones solicitadas por PHENOMENON ROBOTICS, S.L. clicar aquí.Otras invenciones solicitadas en la clasificación internacional de patentes E04G 21/18,G01C 15/04.
Es posible conocer invenciones similares al campo de la técnica se refiere. El registro de patente nacional por ROBOT TRAZADOR DE LÍNEAS DE MARCAJE PARA CONSTRUCCIÓN con el número P202230758 está clasificado con la clasificación E04G 21/18,G01C 15/04 por lo que si se desea conocer más registros con la clasificación E04G 21/18,G01C 15/04 clicar aquí.Otras invenciones solicitadas a través del representante MIKEL VEIGA SERRANO
Es posible conocer todas las invenciones solicitadas a través del agente MIKEL VEIGA SERRANO entre las que se encuentra el registro patente nacional por ROBOT TRAZADOR DE LÍNEAS DE MARCAJE PARA CONSTRUCCIÓN con el número P202230758. Si se desean conocer más invenciones solicitadas a través del agente MIKEL VEIGA SERRANO clicar aquí.Patentes en España
Es posible conocer todas las invenciones publicadas en España entre las que se encuentra el registro patente nacional por ROBOT TRAZADOR DE LÍNEAS DE MARCAJE PARA CONSTRUCCIÓN. Nuestro portal www.patentes-y-marcas.com ofrece acceso a las publicaciones de patentes en España. Conocer las patentes registradas en un país es importante para saber las posibilidades de fabricar, vender o explotar una invención en España.Patentes registradas en la clase E
Es posible conocer todas las patentes registradas en la clase E (CONSTRUCCIONES FIJAS) entre las que se encuentra la patente ROBOT TRAZADOR DE LÍNEAS DE MARCAJE PARA CONSTRUCCIÓN con el número P202230758. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase E04
Es posible conocer todas las patentes registradas en la clase E04 (EDIFICIOS) entre las que se encuentra la patente ROBOT TRAZADOR DE LÍNEAS DE MARCAJE PARA CONSTRUCCIÓN con el número P202230758. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase E04G
Es posible conocer todas las patentes registradas en la clase E04G (ANDAMIAJES; MOLDES; ENCOFRADOS; INSTRUMENTOS PARA LA CONSTRUCCION O CUALQUIER OTRO MATERIALACCESORIO) entre las que se encuentra la patente ROBOT TRAZADOR DE LÍNEAS DE MARCAJE PARA CONSTRUCCIÓN con el número P202230758. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase G
Es posible conocer todas las patentes registradas en la clase G (FISICA) entre las que se encuentra la patente ROBOT TRAZADOR DE LÍNEAS DE MARCAJE PARA CONSTRUCCIÓN con el número P202230758. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase G01
Es posible conocer todas las patentes registradas en la clase G01 (METROLOGIA; ENSAYOS) entre las que se encuentra la patente ROBOT TRAZADOR DE LÍNEAS DE MARCAJE PARA CONSTRUCCIÓN con el número P202230758. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase G01C
Es posible conocer todas las patentes registradas en la clase G01C (MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAME) entre las que se encuentra la patente ROBOT TRAZADOR DE LÍNEAS DE MARCAJE PARA CONSTRUCCIÓN con el número P202230758. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.
¿Tienes alguna duda?
Escribe tu consulta y te responderemos rápida y gratuitamente.

Otras patentes similares
Profesionales Recomendados
Barcelona
933182440
 España
España
933182440
España

Barcelona
+34 93 362 16 97
España
+34 93 362 16 97
España

Barcelona
932 593 600
España
932 593 600
España







