


- Home /
- Publicaciones de patentes /
- ROBOT PARA DESPLAZAMIENTO POR LÍNEAS ELÉCTRICAS AÉREAS DE MEDIA Y ALTA TENSIÓN
Patente nacional por "ROBOT PARA DESPLAZAMIENTO POR LÍNEAS ELÉCTRICAS AÉREAS DE MEDIA Y ALTA TENSIÓN"
Este registro ha sido solicitado por
Persona física
Contacto
- Estado: Vigente
- País:
- España
- Fecha solicitud:
- 31/03/2023
- Número solicitud:
-
P202330272
- Número publicación:
-
ES2955438
- Fecha de concesión:
-
- Inventores:
-
Persona física
- Datos del titular:
-
Persona física
- Datos del representante:
-
- Clasificación Internacional de Patentes:
- H02G 1/02,H02G 7/05,B25J 9/10,G01R 31/00
- Clasificación Internacional de Patentes de la publicación:
- H02G 1/02,H02G 7/05,B25J 9/10,G01R 31/00
- Fecha de vencimiento:
Quiero registrar una patente

Reivindicaciones:
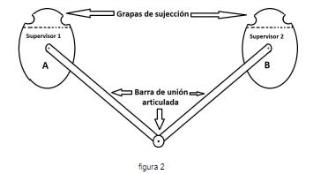
+ ES-2955438_A1El objeto de la invención es el de realizar un robot, sencillo, ligero, rápido y ágil capaz de circular por las líneas eléctricas de media y alta tensión, tomando datos e imágenes del estado de las instalaciones, sin alterar el estado normal en explotación de las mismas. 1 Robot para desplazamiento por líneas eléctricas de media y alta tensión, que se caracteriza por circular por la parte inferior del conductor, lo hace tanto con la línea en tensión como sin ella. 2 Robot para desplazamiento por líneas eléctricas de media y alta tensión, que se caracteriza por su forma en "V". 3 Robot para desplazamiento por líneas eléctricas de media y alta tensión, que se compone de dos supervisores ( figura 23) . 4 Robot para desplazamiento por líneas eléctricas de media y alta tensión, con dos supervisores que comprenden cada uno de ellos una grapa de sujeción y desplazamiento. 5 Robot para desplazamiento por líneas de media y alta tensión, caracterizado por realizar el movimiento para sortear los obstáculos en la línea por la parte inferior, a modo ilustrativo figuras (6 a 21) .
Los productos y servicios protegidos por este registro son:
H02G 1/02 - H02G 7/05 - B25J 9/10 - G01R 31/00
Descripciones:
+ ES-2955438_A1 Robot para desplazamiento por líneas eléctricas aéreas de media y alta tensión SECTOR DE LA TÉCNICA Sector eléctrico: en este sector actualmente se está destinando una gran cantidad de recursos humanos a las tareas de inspección y mantenimiento de la red lo que supone una gran cantidad de recursos económicos. Estas inspecciones se están realizando mayoritariamente a pie, lo que las hace lentas, en algún caso se están realizando con helicópteros y actualmente se están empezando a realizar con drones, lo que las hace complejas muy caras y peligrosas. Por tratarse de un servicio esencial, se convierte en un sector estratégico que es cada vez más indispensable en el día día de la ciudadanía, su actividad laboral implica grandes y graves riesgos, se hace necesaria un innovación tecnológica que permita realizar los trabajos minimizando riesgos y optimizando las operaciones de inspección y de mantenimiento preventivo que garanticen el suministro. ANTECEDENTES DE LA INVENCIÓN Una vez comprobado en internet y en la oficina de patentes y marcas, se encontraron algunas aproximaciones que en algún caso distan mucho de abordar los tres problemas mas grandes a los que se enfrentan este tipo de aparatos, que son: la presencia de tensiones muy elevadas e intensidades nada despreciables, los fuertes campos magnéticos a los que son sometidos los aparatos que trabajan en estas condiciones y el reto que supone desplazarse por la línea avanzando de un vano a otro del conductor, que está delimitado por los apoyos, y el paso de los distintos elementos de la compleja aparamenta de las líneas eléctricas. Existe un vehículo autopropulsado amparado por la patente ES 2 575 737 A1, que se desplaza por las líneas de alta tensión pero necesita la instalación de un cable adicional y que además no puede llevar corriente, lo que complica su instalación. También existe un sistema de inspección autónomo con la patente ES 1152085 U, que no deja de ser una declaración de intenciones, sin tener en cuenta los tres problemas principales que presentan las líneas eléctricas, además de no disponer de un diseño mecánico que realice el desplazamiento y salve los obstáculos de la red. Desde Perú se patentó un sistema para la inspección de líneas eléctricas bajo el número PCT/PE2017/000033, este sistema está pensado para transitar por encima de los conductores y pasar los elementos de la línea, cosa que es imposible y la prueba es que no tiene un diseño mecánico adecuado ni se explica la forma de pasar la aparamenta eléctrica. En EEUU existe un dispositivo tal como "Expliner" que se desplaza por dos conductores del mismo circuito, es aparatoso y voluminoso, además de exigir dos conductores para su desplazamiento. También en EEUU existe el "SkySweeper" que es un proyecto de robot que se desplaza a saltos y que no esta desarrollado para discurrir por una línea en tensión, además estos saltos producen vibraciones en los conductores, que pueden provocar averías por cortocircuitos en la red. Este invento que se expone, representa una gran innovación al dar solución a un aspecto tan complicado con un robot, sencillo, ligero que es capaz de desplazarse a velocidades relativamente altas de una forma ágil, por las líneas eléctricas de media y alta tensión, sin problemas de instalación. EXPLICACIÓN DE LA INVENCIÓN Inicialmente este robot esta pensado para tareas de inspección, con capacidad autónoma, es programable con la estructura de la red, aunque tampoco es indispensable. Será capaz de desplazarse autónomamente y tomar los datos e imágenes que se transmitirán a un sistema control con supervisión y adquisición de datos alojado en el aparato y respaldado remotamente. Estos datos se tratarán y se analizarán para enviar nuevas ordenes o peticiones al robot, cuando sean oportunas. El robot circula suspendido de la línea y por la parte inferior del conductor. El robot estará compuesto por dos grapas que sujetan el robot al cable y le transmiten el movimiento lineal. Estas grapas serán algo parecido a una "V" con las paredes ovaladas. En la parte superior de la grapa dispondrá de al menos tres ruedas o rodamientos que servirán de guía y soporte. En la parte inferior ispondrá de una rueda de transmisión tipo oruga, que proporcionará la tracción y el agarre suficiente para mover el robot, las paredes de la "V" se unirán con una articulación que permite el movimiento de apertura y cierre para que el robot se sujete y suelte del cable. Como medida adicional de seguridad dispondrá de un cierre a modo de gancho, que no se representa en el dibujo, este gancho asegura el cierre de la grapa y evita el desprendimiento accidental del robot del conductor de la línea eléctrica. El aspecto aproximado de la grapa será el del dibujo que se acompaña en este documento figuras 3, 4 y 5. Unido a cada grapa y por la parte inferior se alojará un compartimento, dentro del cual se alojaran todos los componentes, mecanismos y electrónica, tales como: cámaras (ópticas, infrarrojas) detectores de distancia (por ultrasonidos y láser) , los motores o servomotores para su funcionamiento, una controladora para toda la electrónica necesaria y un miniordenador, para realizar las tareas, que mediante el software adecuado y el sistema de control manejará el automatismo y la comunicación del robot. A este conjunto en adelante nos referiremos a el como "supervisor", Los dos supervisores están unidos por una rotula con movimiento cónico a dos barras con una articulación en el medio. El robot es simétrico y podrá operar indistintamente en ambas direcciones, hacia adelante y hacia atrás. Las capas de protección del robot serán: Eléctrica, Inductiva y mecánica; las capas son las mismas en todo el aparato y están compuestas por un aislamiento polimérico exterior, un apantallamiento metálico, un capa semiconductora, otro aislamiento interior y una carcasa de protección mecánica. A continuación se describe básicamente las soluciones a los tres grupos de problemas principales que presentan las actuaciones en una red eléctrica con tensión, que se describe en los siguientes apartados: 1 - Aislamiento de las tensiones e intensidades presentes en el conductor por el que circula el robot, esta sujeto a un solo cable, trabaja a potencial y evita tocar otras partes o elementos de la línea que no estén a la misma tensión, así como objetos ajenos a línea próximos a ella. La solución que se aporta para evitar tener diferencias de potencial e intensidades peligrosas para el robot entre los supervisores, es aumentar la resistencia entre ambos, de esta forma no se producen y no afecta al conjunto especialmente a la electrónica. Para dotar al robot del aislamiento exterior suficiente se instala una capa polimérica similar a la de los aisladores. Teniendo en cuenta que la mayoría de los cables son de aluminio y que su resistencia eléctrica es de 8 2, 82 Qm, al ser una distancia relativamente pequeña la resistencia no alcanzará en ningún caso valores altos, pueden rondar entre 5, 64 -8 Q y 9, 46 -8 Q en una primera estimación. De esta forma si prácticamente no tenemos diferencias de potencial y las resistencias son pequeñas las intensidades también son despreciables. Además la forma del robot en "V" aleja las partes sensibles lo suficiente para que no se produzcan descargas eléctricas, esto también le permite mediante un movimiento angular acercar y alejar un supervisor al otro. 2- En lo referente a la inducción de la línea eléctrica considerando que la electrónica del aparato está alojada en su interior, para evitar los posibles efectos adversos de está se dotará al robot de un apantallamiento metálico entre el aislamiento exterior y otro interior, que aísla la carcasa que protege mecánicamente a toda la electrónica del robot. Este apantallamiento consigue el efecto jaula de Faraday. 3- Explicación del proceso de salto de los obstáculos, el movimiento normal por el cable se hace guiado por los sensores disponibles en el robot. Estos sensores detectan la distancia a los objetos cercanos. Con el sofware de inteligencia artificial (IA) , una vez entrenado mediante aprendizaje automático (machine learning) , se distingue el tipo de objeto y si estos son ajenos o pertenecen a la línea. Luego se analizan para ver si es necesario retroceder o por el contrario se puede pasar para continuar su recorrido. Al detectar un objeto en la línea eléctrica reducirá la velocidad y se detendrá. Se analiza y tras ver si ese tipo de obstáculo es salvable comenzará la maniobra, en caso contrario esperá una decisión para ver si da por finalizado el recorrido o vuelve al punto de origen. A modo de ejemplo se indican las etapas para la operación del paso de un apoyo de amarre. Si llamamos al supervisor 1 "A" y al supervisor 2 "B" y entendemos que se esta desplazando el robot en la dirección "A ^ B". La parte "B" cercana a la primera grapa de amarre se separa del conductor y se mueve hacia abajo, al mismo tiempo que se estira hacia adelante, la parte "A" se desplaza ligeramente hacia adelante también, después la parte "B" subirá y se conectará al conductor una vez superada la primera grapa, luego la parte"A" se desprenderá del conductor y bajará al tiempo que la parte "B" se desplaza hacia adelante (si es necesario) , para a continuación la parte "A" volver a subir y sujetarse al conductor entre las dos grapas, después se realiza un movimiento similar con la siguiente grapa hasta poder concertarse espués del apoyo y continuar con el recorrido normal por el conductor. Para las líneas eléctricas de tensiones más elevadas, en las que la inducción y el efecto del arco es mayor, puede ser necesaria una pequeña modificación del diseño, para evitar problemas de aislamiento tanto eléctrico como magnético. En ese caso se desplazarían los sensores de distancia y las cámaras de los dos supervisores a una esfera colocada en el vértice de las barras de unión, que se representa en la figura 25, el resultado será un mayor aislamiento del aparato. La colocación del robot en la línea electrónica se puede hacer por medios manuales, mediante una pértiga de maniobra aislada, que sujete al robot por el vértice de las barras de unión, en posición invertida y una vez que las grapas se aproximen al conductor se girara 180° el robot, para quedar en su posición de funcionamiento normal, luego ajustara la presión de cierre y estará en condiciones de empezar a operar. También podrá acoplarse el robot, mediante un dron que lo suba con dos brazos en forma de "Y" que lo sujeten por las barras de unión de los supervisores cerca de ellos. Identificación de los componentes del robot, tanto de los dos supervisores (módulos principales) como de la barra de unión de ambos. 1 Motor del bloqueo de seguridad de la grapa 2 Motor del movimiento de apertura y cierre de la grapa (este está duplicado por seguridad) 3 Motor de la rueda tractora 4 Motor del movimiento vertical de la rótula de movimiento cónico 5 Motor del movimiento horizontal de la rótula de movimiento cónico 6 Detector de distancia por ultrasonidos (o láser) 7 Detector de distancia por láser 8 Cámara óptica 9 Cámara térmica 10 Bus de datos, bus de ordenes y alimentación del sistema 11 Controladora de los componentes electrónicos 12 Procesador del sistema 13 Controlador GPS 14 Unidad de memoria 15 Módulo de comunicación 16 Módulo de alimentación del sistema y cargador de baterías 17 Espiras para carga por inducción del sistema 18 Baterías 19 Motor del movimiento angular de las barras de unión 20 Antena GPS 21 Antena de comunicación 22 Aislador, protección y salida de las antenas 23 Cámara 360 Este mismo robot se podrá dotar de brazos articulados con unas garras adecuadas para realizar las tareas de reparación y mantenimiento. BREVE DESCRIPCIÓN DE LOS DIBUJOS Pieza con movimiento cónico figura 1 colocada entres los supervisores y la barra. La representación esquemática del robot es la figura 2 . Las grapas de sujeción figuras 3, 4 y 5. Movimiento básico del paso de un apoyo con dos grapas de amarre, representa en la secuencia de figuras comprendidas entre la figura 6 a figura 21. En la figura 22 se representa la sección de la barra de unión indicando las capas de protección. El despiece de los dos supervisores del robot figura 23 y la barra de unión de los módulos principales figuras 24 y 25. REALIZACIÓN PREFERENTE DE LA INVENCIÓN A la vista de las mencionadas figuras, y de acuerdo con la numeración adoptada, se puede observar en ellas un ejemplo de realización preferente de la invención, la cual comprende las partes y elementos que se indican y describen en detalle a continuación. En la figura 2 se puede observar el robot, compuesto por los dos supervisores en la parte superior se encuentran las grapas, figura 3 a 5, que se encargan de sujetar el robot a la línea eléctrica y del ovimiento por ella, debajo están los dos supervisores del robot en los que se distribuyen los elementos de la electrónica y mecánica que se pueden apreciar en la figura 23 que esencialmente son los siguientes: . un motor (1) que mueve un cierre de seguridad de la grapa. . dos motores (2) que abren y cierran la grapa para sujetarse al conductor. . un motor que mueve la rueda que esta en contacto con el conductor (3) y produce el movimiento del equipo por la línea . . un motor (4) que da a la pieza de unión entre el supervisor y la barra de unión el movimiento vertical. . un motor (5) que da a la pieza de unión entre el supervisor y la barra de unión el movimiento horizontal. . un detector de distancia por ultrasonidos o láser (6) , que evita que el robot choque con cualquier elemento ajeno a la línea próximo a ella. . un detector de distancia láser (7) , que evita que el robot se choque con cualquier elemento perteneciente a línea que se encuentre en su camino. . una cámara óptica (8) que recoge las imágenes del estado de la línea y todos sus componentes, apoyos, crucetas aisladores así como del entorno dentro de la zona de protección de la línea. . una cámara térmica (9) , que captura el estado de los elementos sometidos a corriente y su aislamiento, para detectar los puntos calientes que puedan producir anomalía en el suministro. . el cableado de la electrónica (10) que conecta el procesador y la unidad de control con todos los elementos electrónicos del robot. . un controlador (11) que coordina todos los motores, sensores y los comunica con la unidad central . una unidad central (12) que procesa todos los datos recogidos por el robot, los procesa y da las ordenes a la controladora para su correcto funcionamiento, además de comunicarse con el exterior posicionando las imágenes con el GPS (13) y enviándolas a la memoria interna (14) o al sistema central para análisis importantes que necesiten mayor potencial de cálculo, esta operación se realiza a través del modulo de comunicación (15) y a antena (21) . . se instalaran una espiras (17) que aprovechando la inducción de la línea cargaran las baterías (18) que alimentan el sistema, en paralelo con el cargador situado en modulo de alimentación (16) . . un motor (19) que proporcionará el movimiento angular a las barras de unión de los dos supervisores del robot. . un aislador (22) convenientemente colocado en el extremo más alejado de la línea para permitir la salida de las antenas (20 y 21) así como una cámara 360 (23) que aportará las imágenes para recoger el espacio de protección de la línea. Las barras de unión de los dos módulos figuras 24 y 25 que además son los dos brazos que junto con la rótula de unión, a modo de muñeca, los supervisores a modo de mano y la grapa a modo de dedos componen el robot, con capacidad de movimiento a través de la aparamenta de las líneas eléctricas. Finalmente esta invención es susceptible de aplicarse en las tareas de inspección de líneas de medía y alta tensión, aportando gran cantidad de datos para determinar el estado y predecir las posibles anomalías que puedan perturbar el normal funcionamiento de estas. Todo esto en un tiempo récord con un coste menor al actual y con una mayor seguridad para los operarios encargados de esta labor.
Publicaciones:
ES2955438 (01/12/2023) - A1 Solicitud de patente con informe sobre el estado de la técnica
Eventos:
En fecha 31/03/2023 se realizó Registro Instancia de Solicitud
En fecha 03/04/2023 se realizó Admisión a Trámite
En fecha 03/04/2023 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 03/04/2023 se realizó Superado examen de oficio
En fecha 25/05/2023 se realizó Realizado IET
En fecha 29/05/2023 se realizó 1109P_Comunicación Traslado del IET
En fecha 01/09/2023 se realizó 5215P_Observaciones del solicitante al IET, Opinión Escrita y/o alegaciones a observaciones de terceros
En fecha 04/09/2023 se realizó PETEX_Petición de examen sustantivo
En fecha 22/11/2023 se realizó Registro otra documentación
En fecha 23/11/2023 se realizó 3103P_Registro Solicitud Publicación Anticipada
En fecha 24/11/2023 se realizó Concesión Publicación anticipada
En fecha 30/11/2023 se realizó Publicación Concesión Publicación Anticipada
En fecha 01/12/2023 se realizó Publicación Solicitud
En fecha 01/12/2023 se realizó Publicación Folleto Solicitud con IET (A1)
En fecha 18/03/2024 se realizó Validación petición y/o pago de examen sustantivo conforme
En fecha 23/04/2024 se realizó Designación de Comisión de Expertos
En fecha 01/05/2024 se realizó Finalización de Examen Sustantivo
En fecha 01/05/2024 se realizó 6121P_Comunicación finalización de examen sustantivo
Pagos:
22/03/2023 - Pago Tasas IET
+ ES-2955438_A1El objeto de la invención es el de realizar un robot, sencillo, ligero, rápido y ágil capaz de circular por las líneas eléctricas de media y alta tensión, tomando datos e imágenes del estado de las instalaciones, sin alterar el estado normal en explotación de las mismas. 1 Robot para desplazamiento por líneas eléctricas de media y alta tensión, que se caracteriza por circular por la parte inferior del conductor, lo hace tanto con la línea en tensión como sin ella. 2 Robot para desplazamiento por líneas eléctricas de media y alta tensión, que se caracteriza por su forma en "V". 3 Robot para desplazamiento por líneas eléctricas de media y alta tensión, que se compone de dos supervisores ( figura 23) . 4 Robot para desplazamiento por líneas eléctricas de media y alta tensión, con dos supervisores que comprenden cada uno de ellos una grapa de sujeción y desplazamiento. 5 Robot para desplazamiento por líneas de media y alta tensión, caracterizado por realizar el movimiento para sortear los obstáculos en la línea por la parte inferior, a modo ilustrativo figuras (6 a 21) .
Los productos y servicios protegidos por este registro son:
H02G 1/02 - H02G 7/05 - B25J 9/10 - G01R 31/00
Descripciones:
+ ES-2955438_A1 Robot para desplazamiento por líneas eléctricas aéreas de media y alta tensión SECTOR DE LA TÉCNICA Sector eléctrico: en este sector actualmente se está destinando una gran cantidad de recursos humanos a las tareas de inspección y mantenimiento de la red lo que supone una gran cantidad de recursos económicos. Estas inspecciones se están realizando mayoritariamente a pie, lo que las hace lentas, en algún caso se están realizando con helicópteros y actualmente se están empezando a realizar con drones, lo que las hace complejas muy caras y peligrosas. Por tratarse de un servicio esencial, se convierte en un sector estratégico que es cada vez más indispensable en el día día de la ciudadanía, su actividad laboral implica grandes y graves riesgos, se hace necesaria un innovación tecnológica que permita realizar los trabajos minimizando riesgos y optimizando las operaciones de inspección y de mantenimiento preventivo que garanticen el suministro. ANTECEDENTES DE LA INVENCIÓN Una vez comprobado en internet y en la oficina de patentes y marcas, se encontraron algunas aproximaciones que en algún caso distan mucho de abordar los tres problemas mas grandes a los que se enfrentan este tipo de aparatos, que son: la presencia de tensiones muy elevadas e intensidades nada despreciables, los fuertes campos magnéticos a los que son sometidos los aparatos que trabajan en estas condiciones y el reto que supone desplazarse por la línea avanzando de un vano a otro del conductor, que está delimitado por los apoyos, y el paso de los distintos elementos de la compleja aparamenta de las líneas eléctricas. Existe un vehículo autopropulsado amparado por la patente ES 2 575 737 A1, que se desplaza por las líneas de alta tensión pero necesita la instalación de un cable adicional y que además no puede llevar corriente, lo que complica su instalación. También existe un sistema de inspección autónomo con la patente ES 1152085 U, que no deja de ser una declaración de intenciones, sin tener en cuenta los tres problemas principales que presentan las líneas eléctricas, además de no disponer de un diseño mecánico que realice el desplazamiento y salve los obstáculos de la red. Desde Perú se patentó un sistema para la inspección de líneas eléctricas bajo el número PCT/PE2017/000033, este sistema está pensado para transitar por encima de los conductores y pasar los elementos de la línea, cosa que es imposible y la prueba es que no tiene un diseño mecánico adecuado ni se explica la forma de pasar la aparamenta eléctrica. En EEUU existe un dispositivo tal como "Expliner" que se desplaza por dos conductores del mismo circuito, es aparatoso y voluminoso, además de exigir dos conductores para su desplazamiento. También en EEUU existe el "SkySweeper" que es un proyecto de robot que se desplaza a saltos y que no esta desarrollado para discurrir por una línea en tensión, además estos saltos producen vibraciones en los conductores, que pueden provocar averías por cortocircuitos en la red. Este invento que se expone, representa una gran innovación al dar solución a un aspecto tan complicado con un robot, sencillo, ligero que es capaz de desplazarse a velocidades relativamente altas de una forma ágil, por las líneas eléctricas de media y alta tensión, sin problemas de instalación. EXPLICACIÓN DE LA INVENCIÓN Inicialmente este robot esta pensado para tareas de inspección, con capacidad autónoma, es programable con la estructura de la red, aunque tampoco es indispensable. Será capaz de desplazarse autónomamente y tomar los datos e imágenes que se transmitirán a un sistema control con supervisión y adquisición de datos alojado en el aparato y respaldado remotamente. Estos datos se tratarán y se analizarán para enviar nuevas ordenes o peticiones al robot, cuando sean oportunas. El robot circula suspendido de la línea y por la parte inferior del conductor. El robot estará compuesto por dos grapas que sujetan el robot al cable y le transmiten el movimiento lineal. Estas grapas serán algo parecido a una "V" con las paredes ovaladas. En la parte superior de la grapa dispondrá de al menos tres ruedas o rodamientos que servirán de guía y soporte. En la parte inferior ispondrá de una rueda de transmisión tipo oruga, que proporcionará la tracción y el agarre suficiente para mover el robot, las paredes de la "V" se unirán con una articulación que permite el movimiento de apertura y cierre para que el robot se sujete y suelte del cable. Como medida adicional de seguridad dispondrá de un cierre a modo de gancho, que no se representa en el dibujo, este gancho asegura el cierre de la grapa y evita el desprendimiento accidental del robot del conductor de la línea eléctrica. El aspecto aproximado de la grapa será el del dibujo que se acompaña en este documento figuras 3, 4 y 5. Unido a cada grapa y por la parte inferior se alojará un compartimento, dentro del cual se alojaran todos los componentes, mecanismos y electrónica, tales como: cámaras (ópticas, infrarrojas) detectores de distancia (por ultrasonidos y láser) , los motores o servomotores para su funcionamiento, una controladora para toda la electrónica necesaria y un miniordenador, para realizar las tareas, que mediante el software adecuado y el sistema de control manejará el automatismo y la comunicación del robot. A este conjunto en adelante nos referiremos a el como "supervisor", Los dos supervisores están unidos por una rotula con movimiento cónico a dos barras con una articulación en el medio. El robot es simétrico y podrá operar indistintamente en ambas direcciones, hacia adelante y hacia atrás. Las capas de protección del robot serán: Eléctrica, Inductiva y mecánica; las capas son las mismas en todo el aparato y están compuestas por un aislamiento polimérico exterior, un apantallamiento metálico, un capa semiconductora, otro aislamiento interior y una carcasa de protección mecánica. A continuación se describe básicamente las soluciones a los tres grupos de problemas principales que presentan las actuaciones en una red eléctrica con tensión, que se describe en los siguientes apartados: 1 - Aislamiento de las tensiones e intensidades presentes en el conductor por el que circula el robot, esta sujeto a un solo cable, trabaja a potencial y evita tocar otras partes o elementos de la línea que no estén a la misma tensión, así como objetos ajenos a línea próximos a ella. La solución que se aporta para evitar tener diferencias de potencial e intensidades peligrosas para el robot entre los supervisores, es aumentar la resistencia entre ambos, de esta forma no se producen y no afecta al conjunto especialmente a la electrónica. Para dotar al robot del aislamiento exterior suficiente se instala una capa polimérica similar a la de los aisladores. Teniendo en cuenta que la mayoría de los cables son de aluminio y que su resistencia eléctrica es de 8 2, 82 Qm, al ser una distancia relativamente pequeña la resistencia no alcanzará en ningún caso valores altos, pueden rondar entre 5, 64 -8 Q y 9, 46 -8 Q en una primera estimación. De esta forma si prácticamente no tenemos diferencias de potencial y las resistencias son pequeñas las intensidades también son despreciables. Además la forma del robot en "V" aleja las partes sensibles lo suficiente para que no se produzcan descargas eléctricas, esto también le permite mediante un movimiento angular acercar y alejar un supervisor al otro. 2- En lo referente a la inducción de la línea eléctrica considerando que la electrónica del aparato está alojada en su interior, para evitar los posibles efectos adversos de está se dotará al robot de un apantallamiento metálico entre el aislamiento exterior y otro interior, que aísla la carcasa que protege mecánicamente a toda la electrónica del robot. Este apantallamiento consigue el efecto jaula de Faraday. 3- Explicación del proceso de salto de los obstáculos, el movimiento normal por el cable se hace guiado por los sensores disponibles en el robot. Estos sensores detectan la distancia a los objetos cercanos. Con el sofware de inteligencia artificial (IA) , una vez entrenado mediante aprendizaje automático (machine learning) , se distingue el tipo de objeto y si estos son ajenos o pertenecen a la línea. Luego se analizan para ver si es necesario retroceder o por el contrario se puede pasar para continuar su recorrido. Al detectar un objeto en la línea eléctrica reducirá la velocidad y se detendrá. Se analiza y tras ver si ese tipo de obstáculo es salvable comenzará la maniobra, en caso contrario esperá una decisión para ver si da por finalizado el recorrido o vuelve al punto de origen. A modo de ejemplo se indican las etapas para la operación del paso de un apoyo de amarre. Si llamamos al supervisor 1 "A" y al supervisor 2 "B" y entendemos que se esta desplazando el robot en la dirección "A ^ B". La parte "B" cercana a la primera grapa de amarre se separa del conductor y se mueve hacia abajo, al mismo tiempo que se estira hacia adelante, la parte "A" se desplaza ligeramente hacia adelante también, después la parte "B" subirá y se conectará al conductor una vez superada la primera grapa, luego la parte"A" se desprenderá del conductor y bajará al tiempo que la parte "B" se desplaza hacia adelante (si es necesario) , para a continuación la parte "A" volver a subir y sujetarse al conductor entre las dos grapas, después se realiza un movimiento similar con la siguiente grapa hasta poder concertarse espués del apoyo y continuar con el recorrido normal por el conductor. Para las líneas eléctricas de tensiones más elevadas, en las que la inducción y el efecto del arco es mayor, puede ser necesaria una pequeña modificación del diseño, para evitar problemas de aislamiento tanto eléctrico como magnético. En ese caso se desplazarían los sensores de distancia y las cámaras de los dos supervisores a una esfera colocada en el vértice de las barras de unión, que se representa en la figura 25, el resultado será un mayor aislamiento del aparato. La colocación del robot en la línea electrónica se puede hacer por medios manuales, mediante una pértiga de maniobra aislada, que sujete al robot por el vértice de las barras de unión, en posición invertida y una vez que las grapas se aproximen al conductor se girara 180° el robot, para quedar en su posición de funcionamiento normal, luego ajustara la presión de cierre y estará en condiciones de empezar a operar. También podrá acoplarse el robot, mediante un dron que lo suba con dos brazos en forma de "Y" que lo sujeten por las barras de unión de los supervisores cerca de ellos. Identificación de los componentes del robot, tanto de los dos supervisores (módulos principales) como de la barra de unión de ambos. 1 Motor del bloqueo de seguridad de la grapa 2 Motor del movimiento de apertura y cierre de la grapa (este está duplicado por seguridad) 3 Motor de la rueda tractora 4 Motor del movimiento vertical de la rótula de movimiento cónico 5 Motor del movimiento horizontal de la rótula de movimiento cónico 6 Detector de distancia por ultrasonidos (o láser) 7 Detector de distancia por láser 8 Cámara óptica 9 Cámara térmica 10 Bus de datos, bus de ordenes y alimentación del sistema 11 Controladora de los componentes electrónicos 12 Procesador del sistema 13 Controlador GPS 14 Unidad de memoria 15 Módulo de comunicación 16 Módulo de alimentación del sistema y cargador de baterías 17 Espiras para carga por inducción del sistema 18 Baterías 19 Motor del movimiento angular de las barras de unión 20 Antena GPS 21 Antena de comunicación 22 Aislador, protección y salida de las antenas 23 Cámara 360 Este mismo robot se podrá dotar de brazos articulados con unas garras adecuadas para realizar las tareas de reparación y mantenimiento. BREVE DESCRIPCIÓN DE LOS DIBUJOS Pieza con movimiento cónico figura 1 colocada entres los supervisores y la barra. La representación esquemática del robot es la figura 2 . Las grapas de sujeción figuras 3, 4 y 5. Movimiento básico del paso de un apoyo con dos grapas de amarre, representa en la secuencia de figuras comprendidas entre la figura 6 a figura 21. En la figura 22 se representa la sección de la barra de unión indicando las capas de protección. El despiece de los dos supervisores del robot figura 23 y la barra de unión de los módulos principales figuras 24 y 25. REALIZACIÓN PREFERENTE DE LA INVENCIÓN A la vista de las mencionadas figuras, y de acuerdo con la numeración adoptada, se puede observar en ellas un ejemplo de realización preferente de la invención, la cual comprende las partes y elementos que se indican y describen en detalle a continuación. En la figura 2 se puede observar el robot, compuesto por los dos supervisores en la parte superior se encuentran las grapas, figura 3 a 5, que se encargan de sujetar el robot a la línea eléctrica y del ovimiento por ella, debajo están los dos supervisores del robot en los que se distribuyen los elementos de la electrónica y mecánica que se pueden apreciar en la figura 23 que esencialmente son los siguientes: . un motor (1) que mueve un cierre de seguridad de la grapa. . dos motores (2) que abren y cierran la grapa para sujetarse al conductor. . un motor que mueve la rueda que esta en contacto con el conductor (3) y produce el movimiento del equipo por la línea . . un motor (4) que da a la pieza de unión entre el supervisor y la barra de unión el movimiento vertical. . un motor (5) que da a la pieza de unión entre el supervisor y la barra de unión el movimiento horizontal. . un detector de distancia por ultrasonidos o láser (6) , que evita que el robot choque con cualquier elemento ajeno a la línea próximo a ella. . un detector de distancia láser (7) , que evita que el robot se choque con cualquier elemento perteneciente a línea que se encuentre en su camino. . una cámara óptica (8) que recoge las imágenes del estado de la línea y todos sus componentes, apoyos, crucetas aisladores así como del entorno dentro de la zona de protección de la línea. . una cámara térmica (9) , que captura el estado de los elementos sometidos a corriente y su aislamiento, para detectar los puntos calientes que puedan producir anomalía en el suministro. . el cableado de la electrónica (10) que conecta el procesador y la unidad de control con todos los elementos electrónicos del robot. . un controlador (11) que coordina todos los motores, sensores y los comunica con la unidad central . una unidad central (12) que procesa todos los datos recogidos por el robot, los procesa y da las ordenes a la controladora para su correcto funcionamiento, además de comunicarse con el exterior posicionando las imágenes con el GPS (13) y enviándolas a la memoria interna (14) o al sistema central para análisis importantes que necesiten mayor potencial de cálculo, esta operación se realiza a través del modulo de comunicación (15) y a antena (21) . . se instalaran una espiras (17) que aprovechando la inducción de la línea cargaran las baterías (18) que alimentan el sistema, en paralelo con el cargador situado en modulo de alimentación (16) . . un motor (19) que proporcionará el movimiento angular a las barras de unión de los dos supervisores del robot. . un aislador (22) convenientemente colocado en el extremo más alejado de la línea para permitir la salida de las antenas (20 y 21) así como una cámara 360 (23) que aportará las imágenes para recoger el espacio de protección de la línea. Las barras de unión de los dos módulos figuras 24 y 25 que además son los dos brazos que junto con la rótula de unión, a modo de muñeca, los supervisores a modo de mano y la grapa a modo de dedos componen el robot, con capacidad de movimiento a través de la aparamenta de las líneas eléctricas. Finalmente esta invención es susceptible de aplicarse en las tareas de inspección de líneas de medía y alta tensión, aportando gran cantidad de datos para determinar el estado y predecir las posibles anomalías que puedan perturbar el normal funcionamiento de estas. Todo esto en un tiempo récord con un coste menor al actual y con una mayor seguridad para los operarios encargados de esta labor.
Publicaciones:
ES2955438 (01/12/2023) - A1 Solicitud de patente con informe sobre el estado de la técnica
Eventos:
En fecha 31/03/2023 se realizó Registro Instancia de Solicitud
En fecha 03/04/2023 se realizó Admisión a Trámite
En fecha 03/04/2023 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 03/04/2023 se realizó Superado examen de oficio
En fecha 25/05/2023 se realizó Realizado IET
En fecha 29/05/2023 se realizó 1109P_Comunicación Traslado del IET
En fecha 01/09/2023 se realizó 5215P_Observaciones del solicitante al IET, Opinión Escrita y/o alegaciones a observaciones de terceros
En fecha 04/09/2023 se realizó PETEX_Petición de examen sustantivo
En fecha 22/11/2023 se realizó Registro otra documentación
En fecha 23/11/2023 se realizó 3103P_Registro Solicitud Publicación Anticipada
En fecha 24/11/2023 se realizó Concesión Publicación anticipada
En fecha 30/11/2023 se realizó Publicación Concesión Publicación Anticipada
En fecha 01/12/2023 se realizó Publicación Solicitud
En fecha 01/12/2023 se realizó Publicación Folleto Solicitud con IET (A1)
En fecha 18/03/2024 se realizó Validación petición y/o pago de examen sustantivo conforme
En fecha 23/04/2024 se realizó Designación de Comisión de Expertos
En fecha 01/05/2024 se realizó Finalización de Examen Sustantivo
En fecha 01/05/2024 se realizó 6121P_Comunicación finalización de examen sustantivo
Pagos:
22/03/2023 - Pago Tasas IET
Fuente de la información
Parte de la información aquí publicada es pública puesto que ha sido obtenida de la Oficina de Propiedad Industrial de los diferentes países el 08/05/2024 y por lo tanto puede ser que la información no esté actualizada.Parte de la información aquí mostrada ha sido calculada por nuestro sistema informático y puede no ser veraz.
Privacidad
Si considera que al información aquí publicada afecta a su privacidad y desea que eliminemos la información aquí publicada envíe un email a info@patentes-y-marcas.com o rellene el formulario que encontrará aquí.Información sobre el registro de patente nacional por ROBOT PARA DESPLAZAMIENTO POR LÍNEAS ELÉCTRICAS AÉREAS DE MEDIA Y ALTA TENSIÓN con el número P202330272
El registro de patente nacional por ROBOT PARA DESPLAZAMIENTO POR LÍNEAS ELÉCTRICAS AÉREAS DE MEDIA Y ALTA TENSIÓN con el número P202330272 fue solicitada el 31/03/2023. Se trata de un registro en España por lo que este registro no ofrece protección en el resto de países. El registro ROBOT PARA DESPLAZAMIENTO POR LÍNEAS ELÉCTRICAS AÉREAS DE MEDIA Y ALTA TENSIÓN con el número P202330272 fue solicitada por JESÚS LÓPEZ ALONSO. El registro [modality] por ROBOT PARA DESPLAZAMIENTO POR LÍNEAS ELÉCTRICAS AÉREAS DE MEDIA Y ALTA TENSIÓN con el número P202330272 está clasificado como H02G 1/02,H02G 7/05,B25J 9/10,G01R 31/00 según la clasificación internacional de patentes.
Otras invenciones solicitadas en la clasificación internacional de patentes H02G 1/02,H02G 7/05,B25J 9/10,G01R 31/00.
Es posible conocer invenciones similares al campo de la técnica se refiere. El registro de patente nacional por ROBOT PARA DESPLAZAMIENTO POR LÍNEAS ELÉCTRICAS AÉREAS DE MEDIA Y ALTA TENSIÓN con el número P202330272 está clasificado con la clasificación H02G 1/02,H02G 7/05,B25J 9/10,G01R 31/00 por lo que si se desea conocer más registros con la clasificación H02G 1/02,H02G 7/05,B25J 9/10,G01R 31/00 clicar aquí.Patentes en España
Es posible conocer todas las invenciones publicadas en España entre las que se encuentra el registro patente nacional por ROBOT PARA DESPLAZAMIENTO POR LÍNEAS ELÉCTRICAS AÉREAS DE MEDIA Y ALTA TENSIÓN. Nuestro portal www.patentes-y-marcas.com ofrece acceso a las publicaciones de patentes en España. Conocer las patentes registradas en un país es importante para saber las posibilidades de fabricar, vender o explotar una invención en España.Patentes registradas en la clase H
Es posible conocer todas las patentes registradas en la clase H (ELECTRICIDAD) entre las que se encuentra la patente ROBOT PARA DESPLAZAMIENTO POR LÍNEAS ELÉCTRICAS AÉREAS DE MEDIA Y ALTA TENSIÓN con el número P202330272. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase H02
Es posible conocer todas las patentes registradas en la clase H02 (PRODUCCION, CONVERSION O DISTRIBUCION DE LA ENERGIA ELECTRICA) entre las que se encuentra la patente ROBOT PARA DESPLAZAMIENTO POR LÍNEAS ELÉCTRICAS AÉREAS DE MEDIA Y ALTA TENSIÓN con el número P202330272. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase H02G
Es posible conocer todas las patentes registradas en la clase H02G (INSTALACION DE CABLES O DE LINEAS ELECTRICAS, O DE LINEAS O CABLES ELECTRICOS Y OPTICOS COMBINADOS ) entre las que se encuentra la patente ROBOT PARA DESPLAZAMIENTO POR LÍNEAS ELÉCTRICAS AÉREAS DE MEDIA Y ALTA TENSIÓN con el número P202330272. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase B
Es posible conocer todas las patentes registradas en la clase B (TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTE ) entre las que se encuentra la patente ROBOT PARA DESPLAZAMIENTO POR LÍNEAS ELÉCTRICAS AÉREAS DE MEDIA Y ALTA TENSIÓN con el número P202330272. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase B25
Es posible conocer todas las patentes registradas en la clase B25 (HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTORPORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE) entre las que se encuentra la patente ROBOT PARA DESPLAZAMIENTO POR LÍNEAS ELÉCTRICAS AÉREAS DE MEDIA Y ALTA TENSIÓN con el número P202330272. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase B25J
Es posible conocer todas las patentes registradas en la clase B25J (MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS) entre las que se encuentra la patente ROBOT PARA DESPLAZAMIENTO POR LÍNEAS ELÉCTRICAS AÉREAS DE MEDIA Y ALTA TENSIÓN con el número P202330272. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase G
Es posible conocer todas las patentes registradas en la clase G (FISICA) entre las que se encuentra la patente ROBOT PARA DESPLAZAMIENTO POR LÍNEAS ELÉCTRICAS AÉREAS DE MEDIA Y ALTA TENSIÓN con el número P202330272. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase G01
Es posible conocer todas las patentes registradas en la clase G01 (METROLOGIA; ENSAYOS) entre las que se encuentra la patente ROBOT PARA DESPLAZAMIENTO POR LÍNEAS ELÉCTRICAS AÉREAS DE MEDIA Y ALTA TENSIÓN con el número P202330272. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase G01R
Es posible conocer todas las patentes registradas en la clase G01R (MEDIDA DE VARIABLES ELECTRICAS; MEDIDA DE VARIABLES MAGNETICAS) entre las que se encuentra la patente ROBOT PARA DESPLAZAMIENTO POR LÍNEAS ELÉCTRICAS AÉREAS DE MEDIA Y ALTA TENSIÓN con el número P202330272. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.
¿Tienes alguna duda?
Escribe tu consulta y te responderemos rápida y gratuitamente.

Otras patentes similares
 P202330182
P202330182
 P202330304
P202330304Profesionales Recomendados
Barcelona
933182440
España
933182440
España

Barcelona
+34 93 362 16 97
España
+34 93 362 16 97
España

Barcelona
932 593 600
España
932 593 600
España







