


- Home /
- Publicaciones de patentes /
- DISPOSITIVO ROBÓTICO CON BRAZO EXTENSIBLE
Patente nacional por "DISPOSITIVO ROBÓTICO CON BRAZO EXTENSIBLE"
Este registro ha sido solicitado por
Persona física
a través del representanteGUSTAVO ADOLFO DE DIOS SERRANÍA
Contacto
- Estado: Vigente
- País:
- España
- Fecha solicitud:
- 21/07/2022
- Número solicitud:
-
P202230674
- Número publicación:
-
ES2959051
- Fecha de concesión:
-
- Inventores:
-
Persona física
- Datos del titular:
-
Persona física
- Datos del representante:
-
Gustavo Adolfo de Dios Serranía
- Clasificación Internacional de Patentes:
- B25J 18/02,B25J 18/06,B25J 9/10,F16H 19/06
- Clasificación Internacional de Patentes de la publicación:
- B25J 18/02,B25J 18/06,B25J 9/10,F16H 19/06
- Fecha de vencimiento:
Quiero registrar una patente

Reivindicaciones:
+ ES-2959051_A11.- Dispositivo robótico que comprende un cuerpo principal (10) con un carrete (2) y un elemento extensible, caracterizado por que el elemento extensible comprende una pletina (1) con una longitud al menos 50 veces mayor que su anchura y una anchura al menos 10 veces mayor que su espesor, teniendo la pletina (1) un primer extremo anclado en el centro del carrete y un segundo extremo un elemento de extremo (3) , que comprende una entrada de pletina (4) configurada para recibir la pletina en una dirección de recepción, una guía (5) configurada para modificar la orientación de la pletina y una salida de pletina (6) configurada para despedir la pletina en una dirección de salida que forma entre 150° y 210° con respecto a la dirección de recepción un punto de fijación (7) situado en el cuerpo principal (10) , donde se ancla el segundo extremo de la pletina (1) una vez ha salido por la salida de pletina del elemento de extremo donde el dispositivo robótico comprende adicionalmente un elemento de extracción (8) , configurado para enrollar y desenrollar la pletina. 2.- Dispositivo robótico según la reivindicación 1, en el que la pletina (1) está fabricada en material metálico. 3.- Dispositivo robótico según cualquiera de las reivindicaciones anteriores, en el que la pletina (1) tiene una distribución anisótropa de momento flector. 4.- Dispositivo robótico según cualquiera de las reivindicaciones anteriores, en el que la entrada de pletina (4) comprende una primera ranura con curvatura y la salida de pletina (6) comprende una segunda ranura con curvatura, de modo que la curvatura de la primera y segunda ranuras provoca que la pletina (1) , al entrar en la entrada de pletina (4) , tenga una cara cóncava que queda enfrentada a una cara cóncava de la pletina que sale por la salida de pletina (6) . 5.- Dispositivo robótico según la reivindicación 4, en el que el punto de fijación tiene la misma curvatura que la segunda ranura. 6.- Dispositivo robótico según cualquiera de las reivindicaciones anteriores, que comprende adicionalmente un elemento de conducción (11) , configurado para recibir la pletina (1) al alir del cuerpo principal, comprendiendo el elemento de conducción una ranura de conducción con una curvatura, para dotar de curvatura a la pletina (1) a medida que atraviesa dicho elemento de conducción (11) . 7.- Dispositivo robótico según cualquiera de las reivindicaciones anteriores, en el que el elemento de extracción (8) está configurado para actuar sobre el carrete, provocando su giro. 8.- Dispositivo robótico según cualquiera de las reivindicaciones 1 a 6, en el que el elemento de extracción (8) está configurado para actuar sobre la pletina, mediante tracción o compresión. 9.- Dispositivo robótico según la reivindicación 8, en el que el elemento de extracción comprende un primer rodillo (8) y un segundo rodillo (9) , situado cada uno en contacto con una zona de la pletina, siendo la zona de contacto de un rodillo opuesta a la zona de contacto del otro rodillo. 10.- Dispositivo robótico según la reivindicación 9, que comprende adicionalmente un mecanismo de tensión (12) que presiona el segundo rodillo contra la pletina para asegurar su contacto. 11.- Dispositivo robótico según cualquiera de las reivindicaciones anteriores, que comprende adicionalmente un muelle de torsión que actúa sobre el carrete. 12.- Dispositivo robótico según cualquiera de las reivindicaciones anteriores, que comprende adicionalmente un sistema electrónico de alimentación y control destinado a gestionar el movimiento del elemento de extracción. 13.- Dispositivo robótico según la reivindicación 12 cuando depende de cualquiera de las reivindicaciones 9 o 10, en el que el sistema electrónico de alimentación y control comprende un motor o motorreductor y sólo uno, destinado a controlar el giro del primer rodillo (8) . 14.- Dispositivo según cualquiera de las reivindicaciones anteriores, donde el cuerpo principal comprende una carcasa que comprende el punto de fijación y dentro de la cual stá comprendido el carrete, donde dicha carcasa comprende materiales metálicos y/o plásticos. 15. Dispositivo según cualquiera de las reivindicaciones anteriores, donde la guía comprende un canal que comprende medios para aplanar la pletina.
Los productos y servicios protegidos por este registro son:
B25J 18/02 - B25J 18/06 - B25J 9/10 - F16H 19/06
Descripciones:
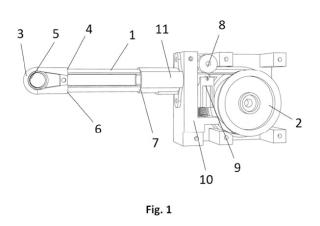
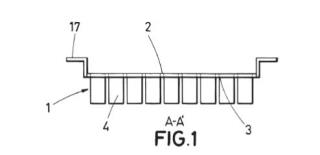
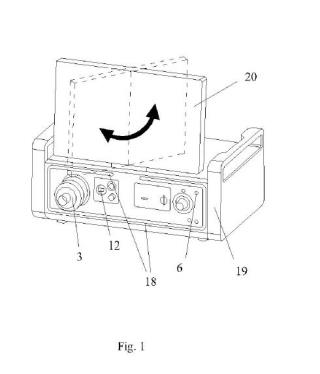
+ ES-2959051_A1 DISPOSITIVO ROBÓTICO CON BRAZO EXTENSIBLE CAMPO TÉCNICO DE LA INVENCIÓN La invención pertenece al campo de los dispositivos robóticos que tienen uno o más brazos extensibles, cuya longitud puede ser incrementada o disminuida de manera controlada. ESTADO DE LA TÉCNICA A la hora de diseñar manipuladores industriales, es necesario que incorporen brazos extensibles y retraíbles. Existen diversas maneras de obtener este efecto. El más conocido es la disposición de dispositivos telescópicos, bien mediante perfiles de sección cilíndrica concéntricos (con radios cada vez más pequeños a medida que un perfil se encuentra dentro de otro) o bien mediante mecanismos de tijera. En ambos casos, existen una serie de problemas asociados inherentemente a la mecánica utilizada. En primer lugar, cabe mencionar la reducción de sección del brazo manipulador, lo que puede ser perjudicial en algunas aplicaciones. Por otro lado, estos mecanismos conllevan la presencia de una serie de partes móviles, con su consecuente necesidad de ajuste y requisitos de fabricación, junto con la posibilidad de que pueden dar lugar a fallos durante su funcionamiento. Por último, en muchos de ellos existe una "longitud mínima" que no es posible evitar, debido al apilamiento de los elementos que forman estos sistemas. Como alternativa a estas dos alternativas se han investigado nuevos mecanismos para proporcionar esta capacidad de extensión basados en elementos individuales que se rigidizan mediante un elemento común como, por ejemplo, el que se divulga en JP5317362B2. La presente invención proporciona una manera alternativa de solucionar este problema técnico mediante la provisión de un dispositivo robótico con brazo extensible. DESCRIPCIÓN DE LA INVENCIÓN Tal y como se ha indicado, la presente invención proporciona una solución para este problema mediante según la reivindicación 1. Las realizaciones preferidas de la invención se definen en las reivindicaciones dependientes. A menos que se defina lo contrario, todos los términos (incluidos los términos técnicos y científicos) utilizados en el presente documento deben interpretarse como es habitual en la técnica. Se entenderá además que los términos de uso común también deben interpretarse como es habitual en la técnica correspondiente y no en un sentido idealizado o excesivamente formal, a menos que se definan expresamente en el presente documento. En este texto, el término "comprende" y sus derivaciones (como "comprendiendo", etc.) no deben entenderse en un sentido excluyente; es decir, estos términos no deben interpretarse como excluyentes de la posibilidad de que lo descrito y definido pueda incluir otros elementos, pasos, etc. En un primer aspecto inventivo, la invención proporciona un dispositivo robótico que comprende un cuerpo principal con un carrete y un elemento extensible, caracterizado por que el elemento extensible comprende una pletina con una longitud al menos 50 veces mayor que su anchura y una anchura al menos 10 veces mayor que su espesor, teniendo la pletina un primer extremo anclado en el centro del carrete y un segundo extremo un elemento de extremo, que comprende una entrada de pletina configurada para recibir la pletina en una dirección de recepción, una guía configurada para modificar la orientación de la pletina y una salida de pletina configurada para despedir la pletina en una dirección de salida que forma entre 150° y 210° con respecto a la dirección de recepción un punto de fijación situado en el cuerpo principal, donde se ancla el segundo extremo de la pletina una vez ha salido por la salida de pletina del elemento de extremo donde el dispositivo robótico comprende adicionalmente un elemento de extracción, configurado para enrollar y desenrollar la pletina. La pletina metálica suele estar provista en forma de cinta, de una configuración similar a la de una cinta métrica. Un primer extremo está anclado al centro de un carrete, de modo que la pletina se enrolla alrededor de sí misma, hasta dejar un segundo extremo que sale del carrete hacia el elemento de extremo. En dicho elemento de extremo entra por la entrada de pletina, gira en la guía y sale por la salida de pletina hasta anclarse en el punto de fijación situado en el cuerpo principal. De este modo, se obtiene un brazo extensible, ya que el elemento de extremo se aleja o se acerca del cuerpo principal en función de lo enrollada o desenrollada que esté la pletina. No son necesarios elementos telescópicos ni de tijera para realizar dicha extensión, por lo que no se tendrían en este caso las desventajas asociadas a estos sistemas. En realizaciones particulares, la pletina está fabricada en material metálico. Para la presente invención, no es obligatorio que la pletina sea metálica, ya que puede estar fabricada en cualquier tipo de material que soporte las cargas de flexión y que tenga la elasticidad suficiente para volver a su estado después de aplanarse. Diversos plásticos y materiales compuestos son adecuados para ello, pero los metales típicos (aluminio, acero) son especialmente adecuados para esta misión. En realizaciones particulares, la pletina tiene una distribución anisótropa de momento flector. Esta distribución anisótropa de momento flector hace que la pletina resista mucha más longitud sin doblarse por su propio peso. Debido a la disposición de la invención, en la que la pletina tiene una primera porción y una segunda porción enfrentada a la primera, se refuerza esta resistencia, de modo que pueda extenderse grandes longitudes sin doblarse ante su peso. En realizaciones particulares, la entrada de pletina comprende una primera ranura con curvatura y la salida de pletina comprende una segunda ranura con curvatura, de modo que la curvatura de la primera y segunda ranuras provoca que la pletina, al entrar en la entrada de pletina, tenga una cara cóncava que queda enfrentada a una cara cóncava de la pletina que sale por la salida de pletina. Existe una primera porción de pletina desde el carrete hasta la entrada del elemento de extremo y una segunda porción de pletina desde la salida del elemento de extremo hasta el punto de fijación. La primera porción y la segunda porción, cuando la distancia entre la salida del carrete y el punto de fijación es similar a la distancia entre la entrada de pletina y la salida de pletina, quedan paralelas. Para obtener una mayor rigidez en el manejo del dispositivo robótico, la primera y la segunda porción de la pletina están curvadas, como en el caso de una cinta métrica. La curvatura está enfrentada, de modo que la parte cóncava de la primera porción está enfrentada a la parte cóncava de la segunda porción. De este modo, desde fuera se ven secciones convexas, simulando un tubo hueco que tiene una discontinuidad (ya que, por lo general, la curvatura no es tal que las dos porciones de pletina lleguen a tocarse) . Esto es ventajoso desde el punto de vista de rigidez y manejo. En realizaciones particulares, el punto de fijación tiene la misma curvatura que la segunda ranura. De este modo, la curvatura durante toda la segunda porción de pletina puede ser constante, ya que no hay ningún elemento que la haga variar entre las condiciones de contorno impuestas por el punto de fijación y por la segunda ranura. En realizaciones particulares, el dispositivo robótico comprende adicionalmente un elemento de conducción, configurado para recibir la pletina al salir del cuerpo principal, comprendiendo el elemento de conducción una ranura de conducción con una curvatura, para dotar de curvatura a la pletina a medida que atraviesa dicho elemento de conducción. En realizaciones particulares, el elemento de extracción está configurado para actuar sobre el carrete, provocando su giro. En realizaciones alternativas, el elemento de extracción está configurado para actuar sobre la pletina, mediante tracción o compresión. Existen numerosas maneras de conseguir que la pletina salga o entre en el carrete. Una de ellas es actuar sobre el propio carrete, confiando que la tensión de la pletina hará que salga o se introduzca, mientras que la otra opción es actuar sobre la propia pletina, tirando de ella o empujándola. En realizaciones particulares, el elemento de extracción comprende un primer rodillo y un segundo rodillo, situado cada uno en contacto con una zona de la pletina, siendo la zona de contacto de un rodillo opuesta a la zona de contacto del otro rodillo. Una manera de conseguir este control de la longitud del brazo es mediante unos rodillos, situados uno en contacto con una de las caras de la pletina y otro en contacto con la cara opuesta. Al realizar un movimiento de giro coordinado, cada uno en un sentido, a la misma velocidad, la pletina será arrastrada hacia dentro o hacia fuera, dependiendo de los sentidos de giro de los rodillos. En realizaciones particulares, el dispositivo robótico comprende adicionalmente un mecanismo de tensión que presiona el segundo rodillo contra la pletina para asegurar su contacto. Una manera de conseguir esta actuación es mediante la tensión de uno de los rodillos contra la pletina (y por tanto contra el otro rodillo, que permanece en una posición fija al otro lado de la pletina) , de modo que se asegure el contacto, y por tanto, el rozamiento, entre ambos rodillos y la pletina. En realizaciones particulares, el dispositivo robótico comprende adicionalmente un muelle de torsión que actúa sobre el carrete. De este modo, el carrete tiene su propia inercia de tensión para recoger la pletina, mientras que un elemento de compensación (como pueden ser los propios rodillos, por ejemplo) mantendrían la posición de la pletina, para evitar que el muelle la recoja involuntariamente. En realizaciones particulares, el dispositivo robótico comprende adicionalmente un sistema electrónico de alimentación y control destinado a gestionar el movimiento del elemento de extracción. En realizaciones particulares, el sistema electrónico de alimentación y control comprende un motor o motorreductor y sólo uno. El sistema electrónico puede comprender muchos elementos, pero, en estos casos, sólo un motor, destinado a controlar el giro del primer rodillo, que es el que guía el movimiento, ya que el segundo rodillo, en este caso, permanece libre, con la única misión de presionarse contra la pletina, para asegurar el contacto y, por tanto, el rozamiento. En realizaciones particulares, el cuerpo principal comprende una carcasa que comprende el punto de fijación y dentro de la cual está comprendido el carrete, donde dicha carcasa comprende materiales metálicos y/o plásticos. En realizaciones particulares, la guía comprende un canal que comprende medios para aplanar la pletina. Este aplanamiento es ventajoso ya que cuando la pletina se encuentra en disposición plana, sin curvatura, ofrece menor resistencia al giro. RESUMEN DE LAS FIGURAS Para completar la descripción, y con el fin de proporcionar una mejor comprensión de la invención, se proporciona un conjunto de dibujos. Dichos dibujos forman parte integrante de la descripción e ilustran una realización de la invención, lo cual no debe interpretarse como una restricción del alcance de la invención, sino sólo como un ejemplo de cómo puede llevarse a cabo la invención. Los dibujos comprenden las siguientes figuras: La Figura 1 muestra una vista en perspectiva de un ejemplo particular de un dispositivo robótico de acuerdo con la invención. La Figura 2 muestra un detalle en la disposición de los rodillos en relación a la pletina, y su movimiento, dentro de un ejemplo particular de un dispositivo robótico de acuerdo con la invención. La Figura 3 muestra un ejemplo de aplicación de este dispositivo robótico. En estas figuras se han utilizado las siguientes referencias numéricas: 1 Pletina 2 Carrete 3 Elemento de extremo 4 Entrada de pletina 5 Guía 6 Salida de pletina 7 Elemento de conexión 8 Primer rodillo 9 Segundo rodillo 10 Cuerpo principal 11 Elemento de conexión 12 Muelle de tensión DESCRIPCIÓN DETALLADA DE UN EJEMPLO PARTICULAR DE REALIZACIÓN Las realizaciones de ejemplo se describen con suficiente detalle como para que el experto n la materia pueda incorporar y poner en práctica los sistemas y procesos aquí descritos. Es importante entender que las realizaciones pueden proporcionarse en muchas formas alternativas y no deben interpretarse como limitadas a los ejemplos aquí expuestos. Por consiguiente, aunque las realizaciones pueden modificarse de diversas maneras y adoptar varias formas alternativas, en los dibujos se muestran realizaciones específicas y se describen en detalle a continuación como ejemplos. No hay intención de limitarse a las formas particulares divulgadas. Por el contrario, deben incluirse todas las modificaciones, equivalentes y alternativas que entren en el ámbito de las reivindicaciones adjuntas. Los elementos de las realizaciones de ejemplo se denotan sistemáticamente con los mismos números de referencia a lo largo de los dibujos y de la descripción detallada, cuando proceda. La figura 1 muestra un esquema de funcionamiento de un dispositivo robótico de acuerdo con la invención. El funcionamiento básico de este dispositivo se basa en una pletina metálica 1, la mayor parte de la cual está enrollada en un carrete 2. Este carrete 2 tiene un primer extremo de la pletina metálica anclado a su centro y tiene también un muelle de torsión para tensar la pletina 1. La pletina metálica 1 es similar a las utilizadas en una cinta métrica. Se trata de una pletina con distribución anisótropa de momento flector, que tiene un espesor de 0.2 mm, una anchura de 19 mm y una longitud de 2 m. Esta distribución anisótropa de momento flector viene dada por la curvatura inicial que se le da a la pletina en el momento de su fabricación, que hace que no oponga la misma resistencia ante un momento flector en un sentido o en el contrario. Esta pletina está enrollada en el carrete 2, y el extremo libre sale del carrete para quedar al alcance de la acción de dos rodillos 8, 9. Una vez que el extremo libre de la pletina ha salido de la acción de los rodillos 8, 9, el extremo libre atraviesa un elemento de conducción 11, situado a la salida del cuerpo principal 10 y fijado a este. La misión de este elemento de conducción 11 es asegurar que la pletina sale del cuerpo principal 10 con la orientación y la curvatura adecuadas, es decir, e manera perpendicular al cuerpo principal (para poder medir bien la distancia a la que se encontrará el elemento de extremo) y con una curvatura que deja la parte convexa hacia arriba y la parte cóncava hacia abajo. A medida que los rodillos vayan extrayendo la pletina del carrete, la longitud de pletina que se encuentra fuera del cuerpo principal 10 será mayor. Este extremo libre atraviesa un elemento de extremo 3, que comprende una entrada de pletina 4 configurada para recibir la pletina en una dirección de recepción (la dirección que traía al salir del elemento de conducción 11) , una guía 5 configurada para modificar la orientación de la pletina y una salida de pletina 6 configurada para despedir la pletina en una dirección de salida que forma 180° con respecto a la dirección de recepción. Es decir, este elemento de extremo recibe el extremo libre de la pletina 1 y le da la vuelta, de modo que la pletina vuelve hacia el cuerpo principal 10 en una dirección paralela a la que traía, pero en sentido contrario. Al final, este extremo de cinta que sale de la salida de pletina 6 se inserta en un elemento de fijación 7 del cuerpo principal, donde queda fijada. Se obtiene así una configuración en la que la parte de la pletina que se ve fuera del cuerpo principal (desde que sale del elemento de conducción 11 hasta que vuelve a insertarse en el elemento de fijación 7) tiene dos porciones: una primera porción que discurre desde el elemento de conducción 11 hasta la entrada de pletina 4 y una segunda porción que discurre desde la salida de pletina 6 y el elemento de fijación 7. Cuando la pletina 1 llega a la entrada de pletina 4, entra con la curvatura definida por la ranura de dicha entrada, pero al llegar a la guía cambia su curvatura hasta hacerse plana, ya que de este modo es más sencillo el giro de 180° que se efectúa al pasar por la guía. Una vez que la pletina llega a la ranura de la salida de pletina 6 vuelve a tomar una curvatura, de modo que la parte cóncava de esta segunda porción queda justo enfrente de la parte cóncava de la primera porción de pletina. De este modo se obtiene una configuración parecida a la de un tubo hueco, pero con una discontinuidad a los lados. El punto de fijación 7 tiene una ranura con la misma curvatura que la segunda ranura, de modo que la curvatura de esta segunda porción se mantenga controlada y constante. El movimiento de extensión y retracción del elemento de extremo 3 es producido debido a ue el segundo extremo de la pletina se encuentra anclado en el elemento de fijación 7. A medida que más y más pletina es desenrollada del carrete, al estar su segundo extremo fijo, la única opción mecánicamente consistente es que la pieza del elemento de extremo se aleje del cuerpo principal 10. Para optimizar el proceso de retracción de la pletina, el carrete va equipado en su interior con un muelle de torsión que ayuda al proceso de enrollado, al igual que ocurre en las cintas métricas o flexómetros. La Figura 2 muestra un detalle en la disposición de los rodillos 8, 9 en relación a la pletina 1 y su movimiento. Un primer rodillo 8 está destinado a estar en contacto con la cara superior y otro segundo rodillo 9 está destinado a estar en contacto con la cara inferior. Mediante un movimiento coordinado de ambos rodillos, éstos harán que el extremo libre salga del carrete o vuelva a él, dependiendo del sentido de giro. En este caso, el primer rodillo 8 está controlado por un motor que acciona el giro de dicho primer rodillo 8 en un sentido o en otro. Mientras tanto, un muelle de tensión 12 presiona el segundo rodillo 9 contra la pletina, para asegurar que el segundo rodillo 9 permanezca en contacto con la pletina 1 y, por tanto, con el primer rodillo 8, que permanece fijo en su posición (pero no en su giro) . En otras realizaciones particulares, otros sistemas de extracción podrían utilizarse, bien porque actúen directamente sobre el carrete, haciéndolo girar en un sentido o en otro, o bien porque actúen sobre la pletina de manera distinta, como por ejemplo con un sistema de bolas en lugar de rodillos. El primer rodillo 8 se encuentra actuado mediante un único motor o motorreductor que permite controlar la velocidad a la que se extiende el mecanismo, así como la posición en cada instante de tiempo. La Figura 3 muestra un ejemplo de aplicación de este dispositivo robótico. En general, distintas realizaciones de la invención pueden aplicarse a multitud de aplicaciones: "pick and place" en industria alimentaria, impresión 3D, sistemas de corte láser o plasma, limpieza de superficies planas, como por ejemplo paneles solares, sistemas automatizados de taladrado y atornillado (por ejemplo en la industria aeroespacial) o ensamblaje de placas de circuito impreso (PCB) , entre otras. Aunque las aplicaciones descritas ya cuentan con sistemas robóticos que las realizan, la principal ventaja de utilizar el presente dispositivo robótico es la reducción de peso, de consumo energético y el potencial para guardar el sistema robótico en un espacio reducido (como un maletín) , lo que ahorra costes asociados a almacenaje, espacio en planta y facilita un rápido despliegue in situ del sistema robótico. En esta figura se observa cómo dos dispositivos robóticos sincronizados pueden llevar un efector final a una posición concreta en el espacio y con una orientación concreta, mediante la gestión de cuatro grados de libertad (por cada dispositivo, la rotación de la base 10 y la longitud de extensión de su elemento de extremo 3) . De este modo, se consigue, con un elemento muy sencillo y fiable, la automatización en el desplazamiento y orientación del efector final.
Publicaciones:
ES2959051 (19/02/2024) - A1 Solicitud de patente con informe sobre el estado de la técnica
Eventos:
En fecha 21/07/2022 se realizó Registro Instancia de Solicitud
En fecha 21/07/2022 se realizó Admisión a Trámite
En fecha 21/07/2022 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 06/09/2022 se realizó Superado examen de oficio
En fecha 25/11/2022 se realizó Realizado IET
En fecha 02/12/2022 se realizó 1109P_Comunicación Traslado del IET
En fecha 03/03/2023 se realizó 3406X_Solicitud Correcciones
En fecha 03/03/2023 se realizó 1551X_Notificación Correcciones Admitidas
En fecha 19/02/2024 se realizó Publicación Solicitud
En fecha 19/02/2024 se realizó Publicación Folleto Solicitud con IET (A1)
En fecha 07/05/2024 se realizó PETEX_Petición de examen sustantivo
Pagos:
21/07/2022 - Pago Tasas IET
+ ES-2959051_A11.- Dispositivo robótico que comprende un cuerpo principal (10) con un carrete (2) y un elemento extensible, caracterizado por que el elemento extensible comprende una pletina (1) con una longitud al menos 50 veces mayor que su anchura y una anchura al menos 10 veces mayor que su espesor, teniendo la pletina (1) un primer extremo anclado en el centro del carrete y un segundo extremo un elemento de extremo (3) , que comprende una entrada de pletina (4) configurada para recibir la pletina en una dirección de recepción, una guía (5) configurada para modificar la orientación de la pletina y una salida de pletina (6) configurada para despedir la pletina en una dirección de salida que forma entre 150° y 210° con respecto a la dirección de recepción un punto de fijación (7) situado en el cuerpo principal (10) , donde se ancla el segundo extremo de la pletina (1) una vez ha salido por la salida de pletina del elemento de extremo donde el dispositivo robótico comprende adicionalmente un elemento de extracción (8) , configurado para enrollar y desenrollar la pletina. 2.- Dispositivo robótico según la reivindicación 1, en el que la pletina (1) está fabricada en material metálico. 3.- Dispositivo robótico según cualquiera de las reivindicaciones anteriores, en el que la pletina (1) tiene una distribución anisótropa de momento flector. 4.- Dispositivo robótico según cualquiera de las reivindicaciones anteriores, en el que la entrada de pletina (4) comprende una primera ranura con curvatura y la salida de pletina (6) comprende una segunda ranura con curvatura, de modo que la curvatura de la primera y segunda ranuras provoca que la pletina (1) , al entrar en la entrada de pletina (4) , tenga una cara cóncava que queda enfrentada a una cara cóncava de la pletina que sale por la salida de pletina (6) . 5.- Dispositivo robótico según la reivindicación 4, en el que el punto de fijación tiene la misma curvatura que la segunda ranura. 6.- Dispositivo robótico según cualquiera de las reivindicaciones anteriores, que comprende adicionalmente un elemento de conducción (11) , configurado para recibir la pletina (1) al alir del cuerpo principal, comprendiendo el elemento de conducción una ranura de conducción con una curvatura, para dotar de curvatura a la pletina (1) a medida que atraviesa dicho elemento de conducción (11) . 7.- Dispositivo robótico según cualquiera de las reivindicaciones anteriores, en el que el elemento de extracción (8) está configurado para actuar sobre el carrete, provocando su giro. 8.- Dispositivo robótico según cualquiera de las reivindicaciones 1 a 6, en el que el elemento de extracción (8) está configurado para actuar sobre la pletina, mediante tracción o compresión. 9.- Dispositivo robótico según la reivindicación 8, en el que el elemento de extracción comprende un primer rodillo (8) y un segundo rodillo (9) , situado cada uno en contacto con una zona de la pletina, siendo la zona de contacto de un rodillo opuesta a la zona de contacto del otro rodillo. 10.- Dispositivo robótico según la reivindicación 9, que comprende adicionalmente un mecanismo de tensión (12) que presiona el segundo rodillo contra la pletina para asegurar su contacto. 11.- Dispositivo robótico según cualquiera de las reivindicaciones anteriores, que comprende adicionalmente un muelle de torsión que actúa sobre el carrete. 12.- Dispositivo robótico según cualquiera de las reivindicaciones anteriores, que comprende adicionalmente un sistema electrónico de alimentación y control destinado a gestionar el movimiento del elemento de extracción. 13.- Dispositivo robótico según la reivindicación 12 cuando depende de cualquiera de las reivindicaciones 9 o 10, en el que el sistema electrónico de alimentación y control comprende un motor o motorreductor y sólo uno, destinado a controlar el giro del primer rodillo (8) . 14.- Dispositivo según cualquiera de las reivindicaciones anteriores, donde el cuerpo principal comprende una carcasa que comprende el punto de fijación y dentro de la cual stá comprendido el carrete, donde dicha carcasa comprende materiales metálicos y/o plásticos. 15. Dispositivo según cualquiera de las reivindicaciones anteriores, donde la guía comprende un canal que comprende medios para aplanar la pletina.
Los productos y servicios protegidos por este registro son:
B25J 18/02 - B25J 18/06 - B25J 9/10 - F16H 19/06
Descripciones:
+ ES-2959051_A1 DISPOSITIVO ROBÓTICO CON BRAZO EXTENSIBLE CAMPO TÉCNICO DE LA INVENCIÓN La invención pertenece al campo de los dispositivos robóticos que tienen uno o más brazos extensibles, cuya longitud puede ser incrementada o disminuida de manera controlada. ESTADO DE LA TÉCNICA A la hora de diseñar manipuladores industriales, es necesario que incorporen brazos extensibles y retraíbles. Existen diversas maneras de obtener este efecto. El más conocido es la disposición de dispositivos telescópicos, bien mediante perfiles de sección cilíndrica concéntricos (con radios cada vez más pequeños a medida que un perfil se encuentra dentro de otro) o bien mediante mecanismos de tijera. En ambos casos, existen una serie de problemas asociados inherentemente a la mecánica utilizada. En primer lugar, cabe mencionar la reducción de sección del brazo manipulador, lo que puede ser perjudicial en algunas aplicaciones. Por otro lado, estos mecanismos conllevan la presencia de una serie de partes móviles, con su consecuente necesidad de ajuste y requisitos de fabricación, junto con la posibilidad de que pueden dar lugar a fallos durante su funcionamiento. Por último, en muchos de ellos existe una "longitud mínima" que no es posible evitar, debido al apilamiento de los elementos que forman estos sistemas. Como alternativa a estas dos alternativas se han investigado nuevos mecanismos para proporcionar esta capacidad de extensión basados en elementos individuales que se rigidizan mediante un elemento común como, por ejemplo, el que se divulga en JP5317362B2. La presente invención proporciona una manera alternativa de solucionar este problema técnico mediante la provisión de un dispositivo robótico con brazo extensible. DESCRIPCIÓN DE LA INVENCIÓN Tal y como se ha indicado, la presente invención proporciona una solución para este problema mediante según la reivindicación 1. Las realizaciones preferidas de la invención se definen en las reivindicaciones dependientes. A menos que se defina lo contrario, todos los términos (incluidos los términos técnicos y científicos) utilizados en el presente documento deben interpretarse como es habitual en la técnica. Se entenderá además que los términos de uso común también deben interpretarse como es habitual en la técnica correspondiente y no en un sentido idealizado o excesivamente formal, a menos que se definan expresamente en el presente documento. En este texto, el término "comprende" y sus derivaciones (como "comprendiendo", etc.) no deben entenderse en un sentido excluyente; es decir, estos términos no deben interpretarse como excluyentes de la posibilidad de que lo descrito y definido pueda incluir otros elementos, pasos, etc. En un primer aspecto inventivo, la invención proporciona un dispositivo robótico que comprende un cuerpo principal con un carrete y un elemento extensible, caracterizado por que el elemento extensible comprende una pletina con una longitud al menos 50 veces mayor que su anchura y una anchura al menos 10 veces mayor que su espesor, teniendo la pletina un primer extremo anclado en el centro del carrete y un segundo extremo un elemento de extremo, que comprende una entrada de pletina configurada para recibir la pletina en una dirección de recepción, una guía configurada para modificar la orientación de la pletina y una salida de pletina configurada para despedir la pletina en una dirección de salida que forma entre 150° y 210° con respecto a la dirección de recepción un punto de fijación situado en el cuerpo principal, donde se ancla el segundo extremo de la pletina una vez ha salido por la salida de pletina del elemento de extremo donde el dispositivo robótico comprende adicionalmente un elemento de extracción, configurado para enrollar y desenrollar la pletina. La pletina metálica suele estar provista en forma de cinta, de una configuración similar a la de una cinta métrica. Un primer extremo está anclado al centro de un carrete, de modo que la pletina se enrolla alrededor de sí misma, hasta dejar un segundo extremo que sale del carrete hacia el elemento de extremo. En dicho elemento de extremo entra por la entrada de pletina, gira en la guía y sale por la salida de pletina hasta anclarse en el punto de fijación situado en el cuerpo principal. De este modo, se obtiene un brazo extensible, ya que el elemento de extremo se aleja o se acerca del cuerpo principal en función de lo enrollada o desenrollada que esté la pletina. No son necesarios elementos telescópicos ni de tijera para realizar dicha extensión, por lo que no se tendrían en este caso las desventajas asociadas a estos sistemas. En realizaciones particulares, la pletina está fabricada en material metálico. Para la presente invención, no es obligatorio que la pletina sea metálica, ya que puede estar fabricada en cualquier tipo de material que soporte las cargas de flexión y que tenga la elasticidad suficiente para volver a su estado después de aplanarse. Diversos plásticos y materiales compuestos son adecuados para ello, pero los metales típicos (aluminio, acero) son especialmente adecuados para esta misión. En realizaciones particulares, la pletina tiene una distribución anisótropa de momento flector. Esta distribución anisótropa de momento flector hace que la pletina resista mucha más longitud sin doblarse por su propio peso. Debido a la disposición de la invención, en la que la pletina tiene una primera porción y una segunda porción enfrentada a la primera, se refuerza esta resistencia, de modo que pueda extenderse grandes longitudes sin doblarse ante su peso. En realizaciones particulares, la entrada de pletina comprende una primera ranura con curvatura y la salida de pletina comprende una segunda ranura con curvatura, de modo que la curvatura de la primera y segunda ranuras provoca que la pletina, al entrar en la entrada de pletina, tenga una cara cóncava que queda enfrentada a una cara cóncava de la pletina que sale por la salida de pletina. Existe una primera porción de pletina desde el carrete hasta la entrada del elemento de extremo y una segunda porción de pletina desde la salida del elemento de extremo hasta el punto de fijación. La primera porción y la segunda porción, cuando la distancia entre la salida del carrete y el punto de fijación es similar a la distancia entre la entrada de pletina y la salida de pletina, quedan paralelas. Para obtener una mayor rigidez en el manejo del dispositivo robótico, la primera y la segunda porción de la pletina están curvadas, como en el caso de una cinta métrica. La curvatura está enfrentada, de modo que la parte cóncava de la primera porción está enfrentada a la parte cóncava de la segunda porción. De este modo, desde fuera se ven secciones convexas, simulando un tubo hueco que tiene una discontinuidad (ya que, por lo general, la curvatura no es tal que las dos porciones de pletina lleguen a tocarse) . Esto es ventajoso desde el punto de vista de rigidez y manejo. En realizaciones particulares, el punto de fijación tiene la misma curvatura que la segunda ranura. De este modo, la curvatura durante toda la segunda porción de pletina puede ser constante, ya que no hay ningún elemento que la haga variar entre las condiciones de contorno impuestas por el punto de fijación y por la segunda ranura. En realizaciones particulares, el dispositivo robótico comprende adicionalmente un elemento de conducción, configurado para recibir la pletina al salir del cuerpo principal, comprendiendo el elemento de conducción una ranura de conducción con una curvatura, para dotar de curvatura a la pletina a medida que atraviesa dicho elemento de conducción. En realizaciones particulares, el elemento de extracción está configurado para actuar sobre el carrete, provocando su giro. En realizaciones alternativas, el elemento de extracción está configurado para actuar sobre la pletina, mediante tracción o compresión. Existen numerosas maneras de conseguir que la pletina salga o entre en el carrete. Una de ellas es actuar sobre el propio carrete, confiando que la tensión de la pletina hará que salga o se introduzca, mientras que la otra opción es actuar sobre la propia pletina, tirando de ella o empujándola. En realizaciones particulares, el elemento de extracción comprende un primer rodillo y un segundo rodillo, situado cada uno en contacto con una zona de la pletina, siendo la zona de contacto de un rodillo opuesta a la zona de contacto del otro rodillo. Una manera de conseguir este control de la longitud del brazo es mediante unos rodillos, situados uno en contacto con una de las caras de la pletina y otro en contacto con la cara opuesta. Al realizar un movimiento de giro coordinado, cada uno en un sentido, a la misma velocidad, la pletina será arrastrada hacia dentro o hacia fuera, dependiendo de los sentidos de giro de los rodillos. En realizaciones particulares, el dispositivo robótico comprende adicionalmente un mecanismo de tensión que presiona el segundo rodillo contra la pletina para asegurar su contacto. Una manera de conseguir esta actuación es mediante la tensión de uno de los rodillos contra la pletina (y por tanto contra el otro rodillo, que permanece en una posición fija al otro lado de la pletina) , de modo que se asegure el contacto, y por tanto, el rozamiento, entre ambos rodillos y la pletina. En realizaciones particulares, el dispositivo robótico comprende adicionalmente un muelle de torsión que actúa sobre el carrete. De este modo, el carrete tiene su propia inercia de tensión para recoger la pletina, mientras que un elemento de compensación (como pueden ser los propios rodillos, por ejemplo) mantendrían la posición de la pletina, para evitar que el muelle la recoja involuntariamente. En realizaciones particulares, el dispositivo robótico comprende adicionalmente un sistema electrónico de alimentación y control destinado a gestionar el movimiento del elemento de extracción. En realizaciones particulares, el sistema electrónico de alimentación y control comprende un motor o motorreductor y sólo uno. El sistema electrónico puede comprender muchos elementos, pero, en estos casos, sólo un motor, destinado a controlar el giro del primer rodillo, que es el que guía el movimiento, ya que el segundo rodillo, en este caso, permanece libre, con la única misión de presionarse contra la pletina, para asegurar el contacto y, por tanto, el rozamiento. En realizaciones particulares, el cuerpo principal comprende una carcasa que comprende el punto de fijación y dentro de la cual está comprendido el carrete, donde dicha carcasa comprende materiales metálicos y/o plásticos. En realizaciones particulares, la guía comprende un canal que comprende medios para aplanar la pletina. Este aplanamiento es ventajoso ya que cuando la pletina se encuentra en disposición plana, sin curvatura, ofrece menor resistencia al giro. RESUMEN DE LAS FIGURAS Para completar la descripción, y con el fin de proporcionar una mejor comprensión de la invención, se proporciona un conjunto de dibujos. Dichos dibujos forman parte integrante de la descripción e ilustran una realización de la invención, lo cual no debe interpretarse como una restricción del alcance de la invención, sino sólo como un ejemplo de cómo puede llevarse a cabo la invención. Los dibujos comprenden las siguientes figuras: La Figura 1 muestra una vista en perspectiva de un ejemplo particular de un dispositivo robótico de acuerdo con la invención. La Figura 2 muestra un detalle en la disposición de los rodillos en relación a la pletina, y su movimiento, dentro de un ejemplo particular de un dispositivo robótico de acuerdo con la invención. La Figura 3 muestra un ejemplo de aplicación de este dispositivo robótico. En estas figuras se han utilizado las siguientes referencias numéricas: 1 Pletina 2 Carrete 3 Elemento de extremo 4 Entrada de pletina 5 Guía 6 Salida de pletina 7 Elemento de conexión 8 Primer rodillo 9 Segundo rodillo 10 Cuerpo principal 11 Elemento de conexión 12 Muelle de tensión DESCRIPCIÓN DETALLADA DE UN EJEMPLO PARTICULAR DE REALIZACIÓN Las realizaciones de ejemplo se describen con suficiente detalle como para que el experto n la materia pueda incorporar y poner en práctica los sistemas y procesos aquí descritos. Es importante entender que las realizaciones pueden proporcionarse en muchas formas alternativas y no deben interpretarse como limitadas a los ejemplos aquí expuestos. Por consiguiente, aunque las realizaciones pueden modificarse de diversas maneras y adoptar varias formas alternativas, en los dibujos se muestran realizaciones específicas y se describen en detalle a continuación como ejemplos. No hay intención de limitarse a las formas particulares divulgadas. Por el contrario, deben incluirse todas las modificaciones, equivalentes y alternativas que entren en el ámbito de las reivindicaciones adjuntas. Los elementos de las realizaciones de ejemplo se denotan sistemáticamente con los mismos números de referencia a lo largo de los dibujos y de la descripción detallada, cuando proceda. La figura 1 muestra un esquema de funcionamiento de un dispositivo robótico de acuerdo con la invención. El funcionamiento básico de este dispositivo se basa en una pletina metálica 1, la mayor parte de la cual está enrollada en un carrete 2. Este carrete 2 tiene un primer extremo de la pletina metálica anclado a su centro y tiene también un muelle de torsión para tensar la pletina 1. La pletina metálica 1 es similar a las utilizadas en una cinta métrica. Se trata de una pletina con distribución anisótropa de momento flector, que tiene un espesor de 0.2 mm, una anchura de 19 mm y una longitud de 2 m. Esta distribución anisótropa de momento flector viene dada por la curvatura inicial que se le da a la pletina en el momento de su fabricación, que hace que no oponga la misma resistencia ante un momento flector en un sentido o en el contrario. Esta pletina está enrollada en el carrete 2, y el extremo libre sale del carrete para quedar al alcance de la acción de dos rodillos 8, 9. Una vez que el extremo libre de la pletina ha salido de la acción de los rodillos 8, 9, el extremo libre atraviesa un elemento de conducción 11, situado a la salida del cuerpo principal 10 y fijado a este. La misión de este elemento de conducción 11 es asegurar que la pletina sale del cuerpo principal 10 con la orientación y la curvatura adecuadas, es decir, e manera perpendicular al cuerpo principal (para poder medir bien la distancia a la que se encontrará el elemento de extremo) y con una curvatura que deja la parte convexa hacia arriba y la parte cóncava hacia abajo. A medida que los rodillos vayan extrayendo la pletina del carrete, la longitud de pletina que se encuentra fuera del cuerpo principal 10 será mayor. Este extremo libre atraviesa un elemento de extremo 3, que comprende una entrada de pletina 4 configurada para recibir la pletina en una dirección de recepción (la dirección que traía al salir del elemento de conducción 11) , una guía 5 configurada para modificar la orientación de la pletina y una salida de pletina 6 configurada para despedir la pletina en una dirección de salida que forma 180° con respecto a la dirección de recepción. Es decir, este elemento de extremo recibe el extremo libre de la pletina 1 y le da la vuelta, de modo que la pletina vuelve hacia el cuerpo principal 10 en una dirección paralela a la que traía, pero en sentido contrario. Al final, este extremo de cinta que sale de la salida de pletina 6 se inserta en un elemento de fijación 7 del cuerpo principal, donde queda fijada. Se obtiene así una configuración en la que la parte de la pletina que se ve fuera del cuerpo principal (desde que sale del elemento de conducción 11 hasta que vuelve a insertarse en el elemento de fijación 7) tiene dos porciones: una primera porción que discurre desde el elemento de conducción 11 hasta la entrada de pletina 4 y una segunda porción que discurre desde la salida de pletina 6 y el elemento de fijación 7. Cuando la pletina 1 llega a la entrada de pletina 4, entra con la curvatura definida por la ranura de dicha entrada, pero al llegar a la guía cambia su curvatura hasta hacerse plana, ya que de este modo es más sencillo el giro de 180° que se efectúa al pasar por la guía. Una vez que la pletina llega a la ranura de la salida de pletina 6 vuelve a tomar una curvatura, de modo que la parte cóncava de esta segunda porción queda justo enfrente de la parte cóncava de la primera porción de pletina. De este modo se obtiene una configuración parecida a la de un tubo hueco, pero con una discontinuidad a los lados. El punto de fijación 7 tiene una ranura con la misma curvatura que la segunda ranura, de modo que la curvatura de esta segunda porción se mantenga controlada y constante. El movimiento de extensión y retracción del elemento de extremo 3 es producido debido a ue el segundo extremo de la pletina se encuentra anclado en el elemento de fijación 7. A medida que más y más pletina es desenrollada del carrete, al estar su segundo extremo fijo, la única opción mecánicamente consistente es que la pieza del elemento de extremo se aleje del cuerpo principal 10. Para optimizar el proceso de retracción de la pletina, el carrete va equipado en su interior con un muelle de torsión que ayuda al proceso de enrollado, al igual que ocurre en las cintas métricas o flexómetros. La Figura 2 muestra un detalle en la disposición de los rodillos 8, 9 en relación a la pletina 1 y su movimiento. Un primer rodillo 8 está destinado a estar en contacto con la cara superior y otro segundo rodillo 9 está destinado a estar en contacto con la cara inferior. Mediante un movimiento coordinado de ambos rodillos, éstos harán que el extremo libre salga del carrete o vuelva a él, dependiendo del sentido de giro. En este caso, el primer rodillo 8 está controlado por un motor que acciona el giro de dicho primer rodillo 8 en un sentido o en otro. Mientras tanto, un muelle de tensión 12 presiona el segundo rodillo 9 contra la pletina, para asegurar que el segundo rodillo 9 permanezca en contacto con la pletina 1 y, por tanto, con el primer rodillo 8, que permanece fijo en su posición (pero no en su giro) . En otras realizaciones particulares, otros sistemas de extracción podrían utilizarse, bien porque actúen directamente sobre el carrete, haciéndolo girar en un sentido o en otro, o bien porque actúen sobre la pletina de manera distinta, como por ejemplo con un sistema de bolas en lugar de rodillos. El primer rodillo 8 se encuentra actuado mediante un único motor o motorreductor que permite controlar la velocidad a la que se extiende el mecanismo, así como la posición en cada instante de tiempo. La Figura 3 muestra un ejemplo de aplicación de este dispositivo robótico. En general, distintas realizaciones de la invención pueden aplicarse a multitud de aplicaciones: "pick and place" en industria alimentaria, impresión 3D, sistemas de corte láser o plasma, limpieza de superficies planas, como por ejemplo paneles solares, sistemas automatizados de taladrado y atornillado (por ejemplo en la industria aeroespacial) o ensamblaje de placas de circuito impreso (PCB) , entre otras. Aunque las aplicaciones descritas ya cuentan con sistemas robóticos que las realizan, la principal ventaja de utilizar el presente dispositivo robótico es la reducción de peso, de consumo energético y el potencial para guardar el sistema robótico en un espacio reducido (como un maletín) , lo que ahorra costes asociados a almacenaje, espacio en planta y facilita un rápido despliegue in situ del sistema robótico. En esta figura se observa cómo dos dispositivos robóticos sincronizados pueden llevar un efector final a una posición concreta en el espacio y con una orientación concreta, mediante la gestión de cuatro grados de libertad (por cada dispositivo, la rotación de la base 10 y la longitud de extensión de su elemento de extremo 3) . De este modo, se consigue, con un elemento muy sencillo y fiable, la automatización en el desplazamiento y orientación del efector final.
Publicaciones:
ES2959051 (19/02/2024) - A1 Solicitud de patente con informe sobre el estado de la técnica
Eventos:
En fecha 21/07/2022 se realizó Registro Instancia de Solicitud
En fecha 21/07/2022 se realizó Admisión a Trámite
En fecha 21/07/2022 se realizó 1001P_Comunicación Admisión a Trámite
En fecha 06/09/2022 se realizó Superado examen de oficio
En fecha 25/11/2022 se realizó Realizado IET
En fecha 02/12/2022 se realizó 1109P_Comunicación Traslado del IET
En fecha 03/03/2023 se realizó 3406X_Solicitud Correcciones
En fecha 03/03/2023 se realizó 1551X_Notificación Correcciones Admitidas
En fecha 19/02/2024 se realizó Publicación Solicitud
En fecha 19/02/2024 se realizó Publicación Folleto Solicitud con IET (A1)
En fecha 07/05/2024 se realizó PETEX_Petición de examen sustantivo
Pagos:
21/07/2022 - Pago Tasas IET
Fuente de la información
Parte de la información aquí publicada es pública puesto que ha sido obtenida de la Oficina de Propiedad Industrial de los diferentes países el 09/05/2024 y por lo tanto puede ser que la información no esté actualizada.Parte de la información aquí mostrada ha sido calculada por nuestro sistema informático y puede no ser veraz.
Privacidad
Si considera que al información aquí publicada afecta a su privacidad y desea que eliminemos la información aquí publicada envíe un email a info@patentes-y-marcas.com o rellene el formulario que encontrará aquí.Información sobre el registro de patente nacional por DISPOSITIVO ROBÓTICO CON BRAZO EXTENSIBLE con el número P202230674
El registro de patente nacional por DISPOSITIVO ROBÓTICO CON BRAZO EXTENSIBLE con el número P202230674 fue solicitada el 21/07/2022. Se trata de un registro en España por lo que este registro no ofrece protección en el resto de países. El registro DISPOSITIVO ROBÓTICO CON BRAZO EXTENSIBLE con el número P202230674 fue solicitada por UNIVERSIDAD DE CASTILLA LA MANCHA mediante los servicios del agente Gustavo Adolfo de Dios Serranía. El registro [modality] por DISPOSITIVO ROBÓTICO CON BRAZO EXTENSIBLE con el número P202230674 está clasificado como B25J 18/02,B25J 18/06,B25J 9/10,F16H 19/06 según la clasificación internacional de patentes.
Otras invenciones solicitadas en la clasificación internacional de patentes B25J 18/02,B25J 18/06,B25J 9/10,F16H 19/06.
Es posible conocer invenciones similares al campo de la técnica se refiere. El registro de patente nacional por DISPOSITIVO ROBÓTICO CON BRAZO EXTENSIBLE con el número P202230674 está clasificado con la clasificación B25J 18/02,B25J 18/06,B25J 9/10,F16H 19/06 por lo que si se desea conocer más registros con la clasificación B25J 18/02,B25J 18/06,B25J 9/10,F16H 19/06 clicar aquí.Otras invenciones solicitadas a través del representante GUSTAVO ADOLFO DE DIOS SERRANÍA
Es posible conocer todas las invenciones solicitadas a través del agente GUSTAVO ADOLFO DE DIOS SERRANÍA entre las que se encuentra el registro patente nacional por DISPOSITIVO ROBÓTICO CON BRAZO EXTENSIBLE con el número P202230674. Si se desean conocer más invenciones solicitadas a través del agente GUSTAVO ADOLFO DE DIOS SERRANÍA clicar aquí.Patentes en España
Es posible conocer todas las invenciones publicadas en España entre las que se encuentra el registro patente nacional por DISPOSITIVO ROBÓTICO CON BRAZO EXTENSIBLE. Nuestro portal www.patentes-y-marcas.com ofrece acceso a las publicaciones de patentes en España. Conocer las patentes registradas en un país es importante para saber las posibilidades de fabricar, vender o explotar una invención en España.Patentes registradas en la clase B
Es posible conocer todas las patentes registradas en la clase B (TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTE ) entre las que se encuentra la patente DISPOSITIVO ROBÓTICO CON BRAZO EXTENSIBLE con el número P202230674. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase B25
Es posible conocer todas las patentes registradas en la clase B25 (HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTORPORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE) entre las que se encuentra la patente DISPOSITIVO ROBÓTICO CON BRAZO EXTENSIBLE con el número P202230674. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase B25J
Es posible conocer todas las patentes registradas en la clase B25J (MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS) entre las que se encuentra la patente DISPOSITIVO ROBÓTICO CON BRAZO EXTENSIBLE con el número P202230674. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase F
Es posible conocer todas las patentes registradas en la clase F ( MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA) entre las que se encuentra la patente DISPOSITIVO ROBÓTICO CON BRAZO EXTENSIBLE con el número P202230674. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase F16
Es posible conocer todas las patentes registradas en la clase F16 (ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS M) entre las que se encuentra la patente DISPOSITIVO ROBÓTICO CON BRAZO EXTENSIBLE con el número P202230674. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.Patentes registradas en la clase F16H
Es posible conocer todas las patentes registradas en la clase F16H (TRANSMISIONES) entre las que se encuentra la patente DISPOSITIVO ROBÓTICO CON BRAZO EXTENSIBLE con el número P202230674. Conocer las patentes registradas en una clase es importante para saber las posibilidades de registrar una patente en esa misma clase.
¿Tienes alguna duda?
Escribe tu consulta y te responderemos rápida y gratuitamente.

Otras patentes similares
Profesionales Recomendados
Barcelona
933182440
 España
España
933182440
España

Barcelona
+34 93 362 16 97
España
+34 93 362 16 97
España

Barcelona
932 593 600
España
932 593 600
España







